Super-resolution on Text Image Sequences
|
|
|
- Allison Byrd
- 5 years ago
- Views:
Transcription
1 November 4, 2004
2 Outline Outline Geometric Distortion Optical/Motion Blurring Down-Sampling Total Variation
3 Basic Idea Outline Geometric Distortion Optical/Motion Blurring Down-Sampling No optical/image acquisition system is perfect Types of degradation: Geometric distortion Optical/motion blurring Down-sampling Additive noise Our goal is to compensate for this and produce a higher resolution image given a sequence of low-resolution images.
4 Geometric Distortion Outline Geometric Distortion Optical/Motion Blurring Down-Sampling image plane planar surface optic centre quantization
5 Optical/Motion Blurring Outline Geometric Distortion Optical/Motion Blurring Down-Sampling Optical blurring in eye: 1 1
6 Optical/Motion Blurring Outline Geometric Distortion Optical/Motion Blurring Down-Sampling Figure 5.5: Each simulated pixel is a weighted sum of several super-pixels. The weights are determined by the geometric viewing transformation, the form and size of the pointspread function, and also by the quadrature rule used to discretize the generative model. PSF is usually unknown, but Capel and Zisserman chose Gaussian and saw good results. Essentially, there are three possible approaches to the discretization of the generative model which we shall now examine.
 The scene is projected onto the CCD array by perspective projection.")
7 Down-Sampling Outline Geometric Distortion Optical/Motion Blurring Down-Sampling image plane planar surface optic centre quantization Figure 5.3: (Top) A perspective camera is imaging a planar scene. (Left) The scene is projected onto the CCD array by perspective projection. (Right) The CCD elements are assumed to integrate the radiant energy over their surface, producing a spatially-quantized image of the scene.
: m n = S (h T [l(s)]) + η (1) m n (x, y) = S (h(u, v) s (T (x, y))) + η")
8 Model Hi-Res Image Filter Low-Res Image Need Mathematical model that represents process At each point (x, y): m n = S (h T [l(s)]) + η (1) m n (x, y) = S (h(u, v) s (T (x, y))) + η (2)
9 In Matrix Form... Model Becomes: m n = S (h T [l(s)]) + η m n = M n s + η (3) where h, T, S are combined in the matrix M n. For all images, we can stack vertically for an over-determined linear system: m 0 m 1. m N 1 = M 0 M 1. M N 1 + η 0 η 1. η N 1 (4) m = Ms + η (5)
10 Estimator Total probability of observed image m n, given estimate of super-resolution image ŝ is: Pr(m n ŝ) = 1 σ 2π e (bmn(x,y) mn(x,y)) x,y And the associated log-likelihood function is: 2 2σ 2 (6) L(m n ) = x,y ( m n (x, y) m n (x, y)) 2 (7)
11 Estimator To find the maximum likelihood estimate, s ML, we need to maximize L(m n ) over all images: s ML = argmax s L(m n ) (8) Using the Matrix form for the image model from before, we have: L(m n ) = n n n M n s m n 2 = Ms m 2 The maximization above, becomes equivalent to: s ML = argmin s Ms m 2
12 Estimator This is now a standard minimization problem: s ML = (M T M) 1 M T m (9) }{{} M+ Because M is very large and sparse and Nn 2 m 2 matrix and typically N = 30, n 2 = 2500, m 2 = 10000, it is impractical to compute pseudo-inverse. Need iterative methods like conjugate gradient.

13 Problems Very sensitive to noise:

14 Bounded To Solve, use Bounded Estimator:
15 Minimizes same cost function as ML estimator, but uses iterative update with error back-projection: s i+1 = s i + 1 C n T 1 n [h bpf S ( m n m n )] (10) where the back-projection function h bpf = (h psf ) k, for some k 1.
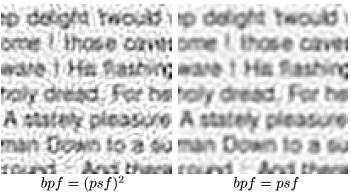
16 Results
17 Problems Very slow to converge compared to Conjugate-Gradient minimization method in MLE:
18 In the MLE, we used: Pr(m n ŝ) = 1 σ 2π e (bmn(x,y) mn(x,y)) 2σ 2 x,y Assuming independent observations, the total probability over all images in sequence is: 2 Pr(m ŝ) = n Pr(m n ŝ) (11) Using Bayes s theorem: Pr(ŝ m) = Pr(m ŝ)pr(ŝ) Pr(m) (12)
19 The maximum a-posterior (MAP) estimate of s becomes: s MAP = argmax s = argmax s Taking the logarithms, we get: Pr(m ŝ)pr(ŝ) Pr(m) Pr(m ŝ)pr(ŝ) s MAP = argmax s = argmax s lnpr(m ŝ) + lnpr(ŝ)) (13) L(m n ) + L(s) (14) n
20 Likelihood of s estimate How do we know what L(s) is? In this paper, Capel and Zisserman suggest a Huber cost function, f (x): s MAP = argmax s L(m n ) λ 2 f ( s(x, y)) (15) n x,y f (x) = x 2, if x α = 2α x α 2, otherwise
21 Likelihood of s estimate But, why the Huber function? Allows for local smoothness while being lenient toward step edges
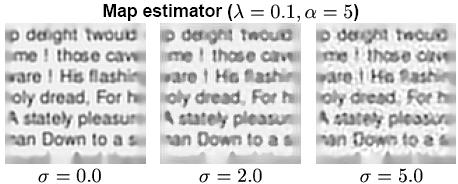
22 Results
23 Same idea as MAP estimator, but use different prior: s TV = argmax L(m n ) λ 2 s(x, y) (16) s n x,y Since, dtv ds =. s s, we can use s s 2 x + s 2 y + β to avoid singularity at s = 0.
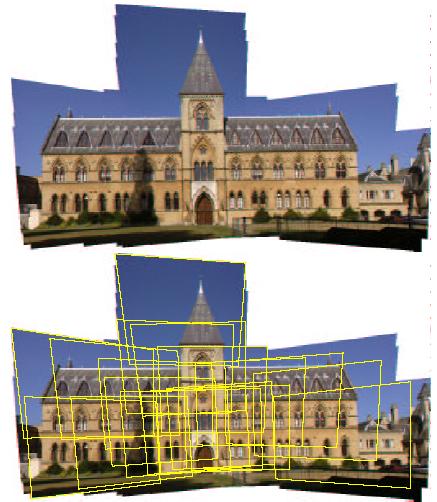
24 Mosaicking

25 License Plate Recognition
26 How do we get from Eqn 1 to Eqn 2? Are we using a common region of the low resolution frames to get the super-resolution image? Otherwise, some frames may not contain the whole area of the image that we are interested in.
27 Recommended Resources David Capel s PhD Thesis: Image Mosaicing and Super-resolution, 2001 Capel and Zisserman. Computer Vision Applied to Super-resolution. IEEE Signal Processing Magazine (2003) vgg/publications/papers/capel03.pdf
Laser sensors. Transmitter. Receiver. Basilio Bona ROBOTICA 03CFIOR
 Mobile & Service Robotics Sensors for Robotics 3 Laser sensors Rays are transmitted and received coaxially The target is illuminated by collimated rays The receiver measures the time of flight (back and
Mobile & Service Robotics Sensors for Robotics 3 Laser sensors Rays are transmitted and received coaxially The target is illuminated by collimated rays The receiver measures the time of flight (back and
Computer Vision I - Basics of Image Processing Part 1
 Computer Vision I - Basics of Image Processing Part 1 Carsten Rother 28/10/2014 Computer Vision I: Basics of Image Processing Link to lectures Computer Vision I: Basics of Image Processing 28/10/2014 2
Computer Vision I - Basics of Image Processing Part 1 Carsten Rother 28/10/2014 Computer Vision I: Basics of Image Processing Link to lectures Computer Vision I: Basics of Image Processing 28/10/2014 2
COMPUTER VISION > OPTICAL FLOW UTRECHT UNIVERSITY RONALD POPPE
 COMPUTER VISION 2017-2018 > OPTICAL FLOW UTRECHT UNIVERSITY RONALD POPPE OUTLINE Optical flow Lucas-Kanade Horn-Schunck Applications of optical flow Optical flow tracking Histograms of oriented flow Assignment
COMPUTER VISION 2017-2018 > OPTICAL FLOW UTRECHT UNIVERSITY RONALD POPPE OUTLINE Optical flow Lucas-Kanade Horn-Schunck Applications of optical flow Optical flow tracking Histograms of oriented flow Assignment
Vision par ordinateur
 Epipolar geometry π Vision par ordinateur Underlying structure in set of matches for rigid scenes l T 1 l 2 C1 m1 l1 e1 M L2 L1 e2 Géométrie épipolaire Fundamental matrix (x rank 2 matrix) m2 C2 l2 Frédéric
Epipolar geometry π Vision par ordinateur Underlying structure in set of matches for rigid scenes l T 1 l 2 C1 m1 l1 e1 M L2 L1 e2 Géométrie épipolaire Fundamental matrix (x rank 2 matrix) m2 C2 l2 Frédéric
Digital Image Processing COSC 6380/4393
 Digital Image Processing COSC 6380/4393 Lecture 21 Nov 16 th, 2017 Pranav Mantini Ack: Shah. M Image Processing Geometric Transformation Point Operations Filtering (spatial, Frequency) Input Restoration/
Digital Image Processing COSC 6380/4393 Lecture 21 Nov 16 th, 2017 Pranav Mantini Ack: Shah. M Image Processing Geometric Transformation Point Operations Filtering (spatial, Frequency) Input Restoration/
Super-Resolution for Hyperspectral Remote Sensing Images with Parallel Level Sets
 Super-Resolution for Hyperspectral Remote Sensing Images with Parallel Level Sets Leon Bungert 1, Matthias J. Ehrhardt 2, Marc Aurele Gilles 3, Jennifer Rasch 4, Rafael Reisenhofer 5 (1) Applied Mathematics
Super-Resolution for Hyperspectral Remote Sensing Images with Parallel Level Sets Leon Bungert 1, Matthias J. Ehrhardt 2, Marc Aurele Gilles 3, Jennifer Rasch 4, Rafael Reisenhofer 5 (1) Applied Mathematics
Super-Resolution. Many slides from Miki Elad Technion Yosi Rubner RTC and more
 Super-Resolution Many slides from Mii Elad Technion Yosi Rubner RTC and more 1 Example - Video 53 images, ratio 1:4 2 Example Surveillance 40 images ratio 1:4 3 Example Enhance Mosaics 4 5 Super-Resolution
Super-Resolution Many slides from Mii Elad Technion Yosi Rubner RTC and more 1 Example - Video 53 images, ratio 1:4 2 Example Surveillance 40 images ratio 1:4 3 Example Enhance Mosaics 4 5 Super-Resolution
Hartley - Zisserman reading club. Part I: Hartley and Zisserman Appendix 6: Part II: Zhengyou Zhang: Presented by Daniel Fontijne
 Hartley - Zisserman reading club Part I: Hartley and Zisserman Appendix 6: Iterative estimation methods Part II: Zhengyou Zhang: A Flexible New Technique for Camera Calibration Presented by Daniel Fontijne
Hartley - Zisserman reading club Part I: Hartley and Zisserman Appendix 6: Iterative estimation methods Part II: Zhengyou Zhang: A Flexible New Technique for Camera Calibration Presented by Daniel Fontijne
Super Resolution Using Graph-cut
 Super Resolution Using Graph-cut Uma Mudenagudi, Ram Singla, Prem Kalra, and Subhashis Banerjee Department of Computer Science and Engineering Indian Institute of Technology Delhi Hauz Khas, New Delhi,
Super Resolution Using Graph-cut Uma Mudenagudi, Ram Singla, Prem Kalra, and Subhashis Banerjee Department of Computer Science and Engineering Indian Institute of Technology Delhi Hauz Khas, New Delhi,
BME I5000: Biomedical Imaging
 1 Lucas Parra, CCNY BME I5000: Biomedical Imaging Lecture 11 Point Spread Function, Inverse Filtering, Wiener Filtering, Sharpening,... Lucas C. Parra, parra@ccny.cuny.edu Blackboard: http://cityonline.ccny.cuny.edu/
1 Lucas Parra, CCNY BME I5000: Biomedical Imaging Lecture 11 Point Spread Function, Inverse Filtering, Wiener Filtering, Sharpening,... Lucas C. Parra, parra@ccny.cuny.edu Blackboard: http://cityonline.ccny.cuny.edu/
Guided Image Super-Resolution: A New Technique for Photogeometric Super-Resolution in Hybrid 3-D Range Imaging
 Guided Image Super-Resolution: A New Technique for Photogeometric Super-Resolution in Hybrid 3-D Range Imaging Florin C. Ghesu 1, Thomas Köhler 1,2, Sven Haase 1, Joachim Hornegger 1,2 04.09.2014 1 Pattern
Guided Image Super-Resolution: A New Technique for Photogeometric Super-Resolution in Hybrid 3-D Range Imaging Florin C. Ghesu 1, Thomas Köhler 1,2, Sven Haase 1, Joachim Hornegger 1,2 04.09.2014 1 Pattern
Dense Image-based Motion Estimation Algorithms & Optical Flow
 Dense mage-based Motion Estimation Algorithms & Optical Flow Video A video is a sequence of frames captured at different times The video data is a function of v time (t) v space (x,y) ntroduction to motion
Dense mage-based Motion Estimation Algorithms & Optical Flow Video A video is a sequence of frames captured at different times The video data is a function of v time (t) v space (x,y) ntroduction to motion
Introduction to Image Super-resolution. Presenter: Kevin Su
 Introduction to Image Super-resolution Presenter: Kevin Su References 1. S.C. Park, M.K. Park, and M.G. KANG, Super-Resolution Image Reconstruction: A Technical Overview, IEEE Signal Processing Magazine,
Introduction to Image Super-resolution Presenter: Kevin Su References 1. S.C. Park, M.K. Park, and M.G. KANG, Super-Resolution Image Reconstruction: A Technical Overview, IEEE Signal Processing Magazine,
Super-Resolution from Image Sequences A Review
 Super-Resolution from Image Sequences A Review Sean Borman, Robert L. Stevenson Department of Electrical Engineering University of Notre Dame 1 Introduction Seminal work by Tsai and Huang 1984 More information
Super-Resolution from Image Sequences A Review Sean Borman, Robert L. Stevenson Department of Electrical Engineering University of Notre Dame 1 Introduction Seminal work by Tsai and Huang 1984 More information
Lecture 16: Computer Vision
 CS4442/9542b: Artificial Intelligence II Prof. Olga Veksler Lecture 16: Computer Vision Motion Slides are from Steve Seitz (UW), David Jacobs (UMD) Outline Motion Estimation Motion Field Optical Flow Field
CS4442/9542b: Artificial Intelligence II Prof. Olga Veksler Lecture 16: Computer Vision Motion Slides are from Steve Seitz (UW), David Jacobs (UMD) Outline Motion Estimation Motion Field Optical Flow Field
Lecture 16: Computer Vision
 CS442/542b: Artificial ntelligence Prof. Olga Veksler Lecture 16: Computer Vision Motion Slides are from Steve Seitz (UW), David Jacobs (UMD) Outline Motion Estimation Motion Field Optical Flow Field Methods
CS442/542b: Artificial ntelligence Prof. Olga Veksler Lecture 16: Computer Vision Motion Slides are from Steve Seitz (UW), David Jacobs (UMD) Outline Motion Estimation Motion Field Optical Flow Field Methods
FMA901F: Machine Learning Lecture 3: Linear Models for Regression. Cristian Sminchisescu
 FMA901F: Machine Learning Lecture 3: Linear Models for Regression Cristian Sminchisescu Machine Learning: Frequentist vs. Bayesian In the frequentist setting, we seek a fixed parameter (vector), with value(s)
FMA901F: Machine Learning Lecture 3: Linear Models for Regression Cristian Sminchisescu Machine Learning: Frequentist vs. Bayesian In the frequentist setting, we seek a fixed parameter (vector), with value(s)
Efficient Iterative Semi-supervised Classification on Manifold
 . Efficient Iterative Semi-supervised Classification on Manifold... M. Farajtabar, H. R. Rabiee, A. Shaban, A. Soltani-Farani Sharif University of Technology, Tehran, Iran. Presented by Pooria Joulani
. Efficient Iterative Semi-supervised Classification on Manifold... M. Farajtabar, H. R. Rabiee, A. Shaban, A. Soltani-Farani Sharif University of Technology, Tehran, Iran. Presented by Pooria Joulani
Edge and local feature detection - 2. Importance of edge detection in computer vision
 Edge and local feature detection Gradient based edge detection Edge detection by function fitting Second derivative edge detectors Edge linking and the construction of the chain graph Edge and local feature
Edge and local feature detection Gradient based edge detection Edge detection by function fitting Second derivative edge detectors Edge linking and the construction of the chain graph Edge and local feature
Chapter 7: Computation of the Camera Matrix P
 Chapter 7: Computation of the Camera Matrix P Arco Nederveen Eagle Vision March 18, 2008 Arco Nederveen (Eagle Vision) The Camera Matrix P March 18, 2008 1 / 25 1 Chapter 7: Computation of the camera Matrix
Chapter 7: Computation of the Camera Matrix P Arco Nederveen Eagle Vision March 18, 2008 Arco Nederveen (Eagle Vision) The Camera Matrix P March 18, 2008 1 / 25 1 Chapter 7: Computation of the camera Matrix
Visual Tracking of Unknown Moving Object by Adaptive Binocular Visual Servoing
 Visual Tracking of Unknown Moving Object by Adaptive Binocular Visual Servoing Minoru Asada, Takamaro Tanaka, and Koh Hosoda Adaptive Machine Systems Graduate School of Engineering Osaka University, Suita,
Visual Tracking of Unknown Moving Object by Adaptive Binocular Visual Servoing Minoru Asada, Takamaro Tanaka, and Koh Hosoda Adaptive Machine Systems Graduate School of Engineering Osaka University, Suita,
Topological Mapping. Discrete Bayes Filter
 Topological Mapping Discrete Bayes Filter Vision Based Localization Given a image(s) acquired by moving camera determine the robot s location and pose? Towards localization without odometry What can be
Topological Mapping Discrete Bayes Filter Vision Based Localization Given a image(s) acquired by moving camera determine the robot s location and pose? Towards localization without odometry What can be
Module 4F12: Computer Vision and Robotics Solutions to Examples Paper 2
 Engineering Tripos Part IIB FOURTH YEAR Module 4F2: Computer Vision and Robotics Solutions to Examples Paper 2. Perspective projection and vanishing points (a) Consider a line in 3D space, defined in camera-centered
Engineering Tripos Part IIB FOURTH YEAR Module 4F2: Computer Vision and Robotics Solutions to Examples Paper 2. Perspective projection and vanishing points (a) Consider a line in 3D space, defined in camera-centered
Capturing, Modeling, Rendering 3D Structures
 Computer Vision Approach Capturing, Modeling, Rendering 3D Structures Calculate pixel correspondences and extract geometry Not robust Difficult to acquire illumination effects, e.g. specular highlights
Computer Vision Approach Capturing, Modeling, Rendering 3D Structures Calculate pixel correspondences and extract geometry Not robust Difficult to acquire illumination effects, e.g. specular highlights
Computer Vision I. Dense Stereo Correspondences. Anita Sellent 1/15/16
 Computer Vision I Dense Stereo Correspondences Anita Sellent Stereo Two Cameras Overlapping field of view Known transformation between cameras From disparity compute depth [ Bradski, Kaehler: Learning
Computer Vision I Dense Stereo Correspondences Anita Sellent Stereo Two Cameras Overlapping field of view Known transformation between cameras From disparity compute depth [ Bradski, Kaehler: Learning
Multiple View Geometry in Computer Vision
 Multiple View Geometry in Computer Vision Prasanna Sahoo Department of Mathematics University of Louisville 1 Structure Computation Lecture 18 March 22, 2005 2 3D Reconstruction The goal of 3D reconstruction
Multiple View Geometry in Computer Vision Prasanna Sahoo Department of Mathematics University of Louisville 1 Structure Computation Lecture 18 March 22, 2005 2 3D Reconstruction The goal of 3D reconstruction
Estimating the wavelength composition of scene illumination from image data is an
 Chapter 3 The Principle and Improvement for AWB in DSC 3.1 Introduction Estimating the wavelength composition of scene illumination from image data is an important topics in color engineering. Solutions
Chapter 3 The Principle and Improvement for AWB in DSC 3.1 Introduction Estimating the wavelength composition of scene illumination from image data is an important topics in color engineering. Solutions
Stereo. 11/02/2012 CS129, Brown James Hays. Slides by Kristen Grauman
 Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
Homework. Gaussian, Bishop 2.3 Non-parametric, Bishop 2.5 Linear regression Pod-cast lecture on-line. Next lectures:
 Homework Gaussian, Bishop 2.3 Non-parametric, Bishop 2.5 Linear regression 3.0-3.2 Pod-cast lecture on-line Next lectures: I posted a rough plan. It is flexible though so please come with suggestions Bayes
Homework Gaussian, Bishop 2.3 Non-parametric, Bishop 2.5 Linear regression 3.0-3.2 Pod-cast lecture on-line Next lectures: I posted a rough plan. It is flexible though so please come with suggestions Bayes
A Patch Prior for Dense 3D Reconstruction in Man-Made Environments
 A Patch Prior for Dense 3D Reconstruction in Man-Made Environments Christian Häne 1, Christopher Zach 2, Bernhard Zeisl 1, Marc Pollefeys 1 1 ETH Zürich 2 MSR Cambridge October 14, 2012 A Patch Prior for
A Patch Prior for Dense 3D Reconstruction in Man-Made Environments Christian Häne 1, Christopher Zach 2, Bernhard Zeisl 1, Marc Pollefeys 1 1 ETH Zürich 2 MSR Cambridge October 14, 2012 A Patch Prior for
Object Recognition with Invariant Features
 Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
Computer Vision I - Algorithms and Applications: Basics of Image Processing
 Computer Vision I - Algorithms and Applications: Basics of Image Processing Carsten Rother 28/10/2013 Computer Vision I: Basics of Image Processing Link to lectures Computer Vision I: Basics of Image Processing
Computer Vision I - Algorithms and Applications: Basics of Image Processing Carsten Rother 28/10/2013 Computer Vision I: Basics of Image Processing Link to lectures Computer Vision I: Basics of Image Processing
ICCV 2013 Supplementary Material Super-resolution via Transform-invariant Group-sparse Regularization
 ICCV 2013 Supplementary Material Super-resolution via Transform-invariant Group-sparse Regularization October 4, 2013 1 Contents This is the supplementary material for the paper Super-resolution via Transform-invariant
ICCV 2013 Supplementary Material Super-resolution via Transform-invariant Group-sparse Regularization October 4, 2013 1 Contents This is the supplementary material for the paper Super-resolution via Transform-invariant
Bilevel Sparse Coding
 Adobe Research 345 Park Ave, San Jose, CA Mar 15, 2013 Outline 1 2 The learning model The learning algorithm 3 4 Sparse Modeling Many types of sensory data, e.g., images and audio, are in high-dimensional
Adobe Research 345 Park Ave, San Jose, CA Mar 15, 2013 Outline 1 2 The learning model The learning algorithm 3 4 Sparse Modeling Many types of sensory data, e.g., images and audio, are in high-dimensional
5LSH0 Advanced Topics Video & Analysis
 1 Multiview 3D video / Outline 2 Advanced Topics Multimedia Video (5LSH0), Module 02 3D Geometry, 3D Multiview Video Coding & Rendering Peter H.N. de With, Sveta Zinger & Y. Morvan ( p.h.n.de.with@tue.nl
1 Multiview 3D video / Outline 2 Advanced Topics Multimedia Video (5LSH0), Module 02 3D Geometry, 3D Multiview Video Coding & Rendering Peter H.N. de With, Sveta Zinger & Y. Morvan ( p.h.n.de.with@tue.nl
All images are degraded
 Lecture 7 Image Relaxation: Restoration and Feature Extraction ch. 6 of Machine Vision by Wesley E. Snyder & Hairong Qi Spring 2018 16-725 (CMU RI) : BioE 2630 (Pitt) Dr. John Galeotti The content of these
Lecture 7 Image Relaxation: Restoration and Feature Extraction ch. 6 of Machine Vision by Wesley E. Snyder & Hairong Qi Spring 2018 16-725 (CMU RI) : BioE 2630 (Pitt) Dr. John Galeotti The content of these
Accurate Image Registration from Local Phase Information
 Accurate Image Registration from Local Phase Information Himanshu Arora, Anoop M. Namboodiri, and C.V. Jawahar Center for Visual Information Technology, IIIT, Hyderabad, India { himanshu@research., anoop@,
Accurate Image Registration from Local Phase Information Himanshu Arora, Anoop M. Namboodiri, and C.V. Jawahar Center for Visual Information Technology, IIIT, Hyderabad, India { himanshu@research., anoop@,
Camera Calibration with a Simulated Three Dimensional Calibration Object
 Czech Pattern Recognition Workshop, Tomáš Svoboda (Ed.) Peršlák, Czech Republic, February 4, Czech Pattern Recognition Society Camera Calibration with a Simulated Three Dimensional Calibration Object Hynek
Czech Pattern Recognition Workshop, Tomáš Svoboda (Ed.) Peršlák, Czech Republic, February 4, Czech Pattern Recognition Society Camera Calibration with a Simulated Three Dimensional Calibration Object Hynek
Image Deconvolution.
 Image Deconvolution. Mathematics of Imaging. HW3 Jihwan Kim Abstract This homework is to implement image deconvolution methods, especially focused on a ExpectationMaximization(EM) algorithm. Most of this
Image Deconvolution. Mathematics of Imaging. HW3 Jihwan Kim Abstract This homework is to implement image deconvolution methods, especially focused on a ExpectationMaximization(EM) algorithm. Most of this
Application of Proximal Algorithms to Three Dimensional Deconvolution Microscopy
 Application of Proximal Algorithms to Three Dimensional Deconvolution Microscopy Paroma Varma Stanford University paroma@stanford.edu Abstract In microscopy, shot noise dominates image formation, which
Application of Proximal Algorithms to Three Dimensional Deconvolution Microscopy Paroma Varma Stanford University paroma@stanford.edu Abstract In microscopy, shot noise dominates image formation, which
Optical Flow Estimation
 Optical Flow Estimation Goal: Introduction to image motion and 2D optical flow estimation. Motivation: Motion is a rich source of information about the world: segmentation surface structure from parallax
Optical Flow Estimation Goal: Introduction to image motion and 2D optical flow estimation. Motivation: Motion is a rich source of information about the world: segmentation surface structure from parallax
Computer Vision 2. SS 18 Dr. Benjamin Guthier Professur für Bildverarbeitung. Computer Vision 2 Dr. Benjamin Guthier
 Computer Vision 2 SS 18 Dr. Benjamin Guthier Professur für Bildverarbeitung Computer Vision 2 Dr. Benjamin Guthier 1. IMAGE PROCESSING Computer Vision 2 Dr. Benjamin Guthier Content of this Chapter Non-linear
Computer Vision 2 SS 18 Dr. Benjamin Guthier Professur für Bildverarbeitung Computer Vision 2 Dr. Benjamin Guthier 1. IMAGE PROCESSING Computer Vision 2 Dr. Benjamin Guthier Content of this Chapter Non-linear
Advanced phase retrieval: maximum likelihood technique with sparse regularization of phase and amplitude
 Advanced phase retrieval: maximum likelihood technique with sparse regularization of phase and amplitude A. Migukin *, V. atkovnik and J. Astola Department of Signal Processing, Tampere University of Technology,
Advanced phase retrieval: maximum likelihood technique with sparse regularization of phase and amplitude A. Migukin *, V. atkovnik and J. Astola Department of Signal Processing, Tampere University of Technology,
Image preprocessing in spatial domain
 Image preprocessing in spatial domain Sampling theorem, aliasing, interpolation, geometrical transformations Revision:.4, dated: May 25, 26 Tomáš Svoboda Czech Technical University, Faculty of Electrical
Image preprocessing in spatial domain Sampling theorem, aliasing, interpolation, geometrical transformations Revision:.4, dated: May 25, 26 Tomáš Svoboda Czech Technical University, Faculty of Electrical
MAPI Computer Vision. Multiple View Geometry
 MAPI Computer Vision Multiple View Geometry Geometry o Multiple Views 2- and 3- view geometry p p Kpˆ [ K R t]p Geometry o Multiple Views 2- and 3- view geometry Epipolar Geometry The epipolar geometry
MAPI Computer Vision Multiple View Geometry Geometry o Multiple Views 2- and 3- view geometry p p Kpˆ [ K R t]p Geometry o Multiple Views 2- and 3- view geometry Epipolar Geometry The epipolar geometry
Computer Vision. Exercise Session 10 Image Categorization
 Computer Vision Exercise Session 10 Image Categorization Object Categorization Task Description Given a small number of training images of a category, recognize a-priori unknown instances of that category
Computer Vision Exercise Session 10 Image Categorization Object Categorization Task Description Given a small number of training images of a category, recognize a-priori unknown instances of that category
Image preprocessing in spatial domain
 Image preprocessing in spatial domain Sampling theorem, aliasing, interpolation, geometrical transformations Revision:.3, dated: December 7, 25 Tomáš Svoboda Czech Technical University, Faculty of Electrical
Image preprocessing in spatial domain Sampling theorem, aliasing, interpolation, geometrical transformations Revision:.3, dated: December 7, 25 Tomáš Svoboda Czech Technical University, Faculty of Electrical
CIS 580, Machine Perception, Spring 2015 Homework 1 Due: :59AM
 CIS 580, Machine Perception, Spring 2015 Homework 1 Due: 2015.02.09. 11:59AM Instructions. Submit your answers in PDF form to Canvas. This is an individual assignment. 1 Camera Model, Focal Length and
CIS 580, Machine Perception, Spring 2015 Homework 1 Due: 2015.02.09. 11:59AM Instructions. Submit your answers in PDF form to Canvas. This is an individual assignment. 1 Camera Model, Focal Length and
Computer Vision 2. SS 18 Dr. Benjamin Guthier Professur für Bildverarbeitung. Computer Vision 2 Dr. Benjamin Guthier
 Computer Vision 2 SS 18 Dr. Benjamin Guthier Professur für Bildverarbeitung Computer Vision 2 Dr. Benjamin Guthier 3. HIGH DYNAMIC RANGE Computer Vision 2 Dr. Benjamin Guthier Pixel Value Content of this
Computer Vision 2 SS 18 Dr. Benjamin Guthier Professur für Bildverarbeitung Computer Vision 2 Dr. Benjamin Guthier 3. HIGH DYNAMIC RANGE Computer Vision 2 Dr. Benjamin Guthier Pixel Value Content of this
Markov Random Fields and Gibbs Sampling for Image Denoising
 Markov Random Fields and Gibbs Sampling for Image Denoising Chang Yue Electrical Engineering Stanford University changyue@stanfoed.edu Abstract This project applies Gibbs Sampling based on different Markov
Markov Random Fields and Gibbs Sampling for Image Denoising Chang Yue Electrical Engineering Stanford University changyue@stanfoed.edu Abstract This project applies Gibbs Sampling based on different Markov
What is Computer Vision?
 Perceptual Grouping in Computer Vision Gérard Medioni University of Southern California What is Computer Vision? Computer Vision Attempt to emulate Human Visual System Perceive visual stimuli with cameras
Perceptual Grouping in Computer Vision Gérard Medioni University of Southern California What is Computer Vision? Computer Vision Attempt to emulate Human Visual System Perceive visual stimuli with cameras
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Laboratorio di Problemi Inversi Esercitazione 4: metodi Bayesiani e importance sampling
 Laboratorio di Problemi Inversi Esercitazione 4: metodi Bayesiani e importance sampling Luca Calatroni Dipartimento di Matematica, Universitá degli studi di Genova May 19, 2016. Luca Calatroni (DIMA, Unige)
Laboratorio di Problemi Inversi Esercitazione 4: metodi Bayesiani e importance sampling Luca Calatroni Dipartimento di Matematica, Universitá degli studi di Genova May 19, 2016. Luca Calatroni (DIMA, Unige)
Outline 7/2/201011/6/
 Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
22 October, 2012 MVA ENS Cachan. Lecture 5: Introduction to generative models Iasonas Kokkinos
 Machine Learning for Computer Vision 1 22 October, 2012 MVA ENS Cachan Lecture 5: Introduction to generative models Iasonas Kokkinos Iasonas.kokkinos@ecp.fr Center for Visual Computing Ecole Centrale Paris
Machine Learning for Computer Vision 1 22 October, 2012 MVA ENS Cachan Lecture 5: Introduction to generative models Iasonas Kokkinos Iasonas.kokkinos@ecp.fr Center for Visual Computing Ecole Centrale Paris
CPSC 340: Machine Learning and Data Mining. Principal Component Analysis Fall 2016
 CPSC 340: Machine Learning and Data Mining Principal Component Analysis Fall 2016 A2/Midterm: Admin Grades/solutions will be posted after class. Assignment 4: Posted, due November 14. Extra office hours:
CPSC 340: Machine Learning and Data Mining Principal Component Analysis Fall 2016 A2/Midterm: Admin Grades/solutions will be posted after class. Assignment 4: Posted, due November 14. Extra office hours:
DD2423 Image Analysis and Computer Vision IMAGE FORMATION. Computational Vision and Active Perception School of Computer Science and Communication
 DD2423 Image Analysis and Computer Vision IMAGE FORMATION Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 8, 2013 1 Image formation Goal:
DD2423 Image Analysis and Computer Vision IMAGE FORMATION Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 8, 2013 1 Image formation Goal:
A Comparative Study & Analysis of Image Restoration by Non Blind Technique
 A Comparative Study & Analysis of Image Restoration by Non Blind Technique Saurav Rawat 1, S.N.Tazi 2 M.Tech Student, Assistant Professor, CSE Department, Government Engineering College, Ajmer Abstract:
A Comparative Study & Analysis of Image Restoration by Non Blind Technique Saurav Rawat 1, S.N.Tazi 2 M.Tech Student, Assistant Professor, CSE Department, Government Engineering College, Ajmer Abstract:
Today s lecture. Image Alignment and Stitching. Readings. Motion models
 Today s lecture Image Alignment and Stitching Computer Vision CSE576, Spring 2005 Richard Szeliski Image alignment and stitching motion models cylindrical and spherical warping point-based alignment global
Today s lecture Image Alignment and Stitching Computer Vision CSE576, Spring 2005 Richard Szeliski Image alignment and stitching motion models cylindrical and spherical warping point-based alignment global
Outline. Data Association Scenarios. Data Association Scenarios. Data Association Scenarios
 Outline Data Association Scenarios Track Filtering and Gating Global Nearest Neighbor (GNN) Review: Linear Assignment Problem Murthy s k-best Assignments Algorithm Probabilistic Data Association (PDAF)
Outline Data Association Scenarios Track Filtering and Gating Global Nearest Neighbor (GNN) Review: Linear Assignment Problem Murthy s k-best Assignments Algorithm Probabilistic Data Association (PDAF)
Subspace Clustering with Global Dimension Minimization And Application to Motion Segmentation
 Subspace Clustering with Global Dimension Minimization And Application to Motion Segmentation Bryan Poling University of Minnesota Joint work with Gilad Lerman University of Minnesota The Problem of Subspace
Subspace Clustering with Global Dimension Minimization And Application to Motion Segmentation Bryan Poling University of Minnesota Joint work with Gilad Lerman University of Minnesota The Problem of Subspace
Computer Vision I - Filtering and Feature detection
 Computer Vision I - Filtering and Feature detection Carsten Rother 30/10/2015 Computer Vision I: Basics of Image Processing Roadmap: Basics of Digital Image Processing Computer Vision I: Basics of Image
Computer Vision I - Filtering and Feature detection Carsten Rother 30/10/2015 Computer Vision I: Basics of Image Processing Roadmap: Basics of Digital Image Processing Computer Vision I: Basics of Image
Rectification and Distortion Correction
 Rectification and Distortion Correction Hagen Spies March 12, 2003 Computer Vision Laboratory Department of Electrical Engineering Linköping University, Sweden Contents Distortion Correction Rectification
Rectification and Distortion Correction Hagen Spies March 12, 2003 Computer Vision Laboratory Department of Electrical Engineering Linköping University, Sweden Contents Distortion Correction Rectification
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry
 55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
arxiv: v1 [cs.cv] 2 May 2016
![arxiv: v1 [cs.cv] 2 May 2016](/thumbs/86/93079061.jpg "arxiv: v1 [cs.cv] 2 May 2016") 16-811 Math Fundamentals for Robotics Comparison of Optimization Methods in Optical Flow Estimation Final Report, Fall 2015 arxiv:1605.00572v1 [cs.cv] 2 May 2016 Contents Noranart Vesdapunt Master of Computer
16-811 Math Fundamentals for Robotics Comparison of Optimization Methods in Optical Flow Estimation Final Report, Fall 2015 arxiv:1605.00572v1 [cs.cv] 2 May 2016 Contents Noranart Vesdapunt Master of Computer
Image Rectification (Stereo) (New book: 7.2.1, old book: 11.1)
 (New book: 7.2.1, old book: 11.1)") Image Rectification (Stereo) (New book: 7.2.1, old book: 11.1) Guido Gerig CS 6320 Spring 2013 Credits: Prof. Mubarak Shah, Course notes modified from: http://www.cs.ucf.edu/courses/cap6411/cap5415/, Lecture
Image Rectification (Stereo) (New book: 7.2.1, old book: 11.1) Guido Gerig CS 6320 Spring 2013 Credits: Prof. Mubarak Shah, Course notes modified from: http://www.cs.ucf.edu/courses/cap6411/cap5415/, Lecture
Image Restoration. Diffusion Denoising Deconvolution Super-resolution Tomographic Reconstruction
 Image Restoration Image Restoration Diffusion Denoising Deconvolution Super-resolution Tomographic Reconstruction Diffusion Term Consider only the regularization term E-L equation: (Laplace equation) Steepest
Image Restoration Image Restoration Diffusion Denoising Deconvolution Super-resolution Tomographic Reconstruction Diffusion Term Consider only the regularization term E-L equation: (Laplace equation) Steepest
Machine Learning / Jan 27, 2010
 Revisiting Logistic Regression & Naïve Bayes Aarti Singh Machine Learning 10-701/15-781 Jan 27, 2010 Generative and Discriminative Classifiers Training classifiers involves learning a mapping f: X -> Y,
Revisiting Logistic Regression & Naïve Bayes Aarti Singh Machine Learning 10-701/15-781 Jan 27, 2010 Generative and Discriminative Classifiers Training classifiers involves learning a mapping f: X -> Y,
Face Hallucination Based on Eigentransformation Learning
 Advanced Science and Technology etters, pp.32-37 http://dx.doi.org/10.14257/astl.2016. Face allucination Based on Eigentransformation earning Guohua Zou School of software, East China University of Technology,
Advanced Science and Technology etters, pp.32-37 http://dx.doi.org/10.14257/astl.2016. Face allucination Based on Eigentransformation earning Guohua Zou School of software, East China University of Technology,
Why is computer vision difficult?
 Why is computer vision difficult? Viewpoint variation Illumination Scale Why is computer vision difficult? Intra-class variation Motion (Source: S. Lazebnik) Background clutter Occlusion Challenges: local
Why is computer vision difficult? Viewpoint variation Illumination Scale Why is computer vision difficult? Intra-class variation Motion (Source: S. Lazebnik) Background clutter Occlusion Challenges: local
Super-resolution Enhancement of Text Image Sequences
 Super-resolution Enhancement of Text Image Sequences David Capel and Andrew Zisserman Robotics Research Group Department of Engineering Science University of Oxford Oxford OX 3PJ, UK. Abstract The objective
Super-resolution Enhancement of Text Image Sequences David Capel and Andrew Zisserman Robotics Research Group Department of Engineering Science University of Oxford Oxford OX 3PJ, UK. Abstract The objective
Re-rendering from a Dense/Sparse Set of Images
 Re-rendering from a Dense/Sparse Set of Images Ko Nishino Institute of Industrial Science The Univ. of Tokyo (Japan Science and Technology) kon@cvl.iis.u-tokyo.ac.jp Virtual/Augmented/Mixed Reality Three
Re-rendering from a Dense/Sparse Set of Images Ko Nishino Institute of Industrial Science The Univ. of Tokyo (Japan Science and Technology) kon@cvl.iis.u-tokyo.ac.jp Virtual/Augmented/Mixed Reality Three
Superresolution Using Preconditioned Conjugate Gradient Method
 Superresolution Using Preconditioned Conjugate Gradient Method Changjiang Yang, Ramani Duraiswami and Larry Davis Computer Vision Laboratory University of Maryland, College Park, MD 20742 E-mail: {yangcj,ramani,lsd}@umiacs.umd.edu
Superresolution Using Preconditioned Conjugate Gradient Method Changjiang Yang, Ramani Duraiswami and Larry Davis Computer Vision Laboratory University of Maryland, College Park, MD 20742 E-mail: {yangcj,ramani,lsd}@umiacs.umd.edu
GRID WARPING IN TOTAL VARIATION IMAGE ENHANCEMENT METHODS. Andrey Nasonov, and Andrey Krylov
 GRID WARPING IN TOTAL VARIATION IMAGE ENHANCEMENT METHODS Andrey Nasonov, and Andrey Krylov Lomonosov Moscow State University, Moscow, Department of Computational Mathematics and Cybernetics, e-mail: nasonov@cs.msu.ru,
GRID WARPING IN TOTAL VARIATION IMAGE ENHANCEMENT METHODS Andrey Nasonov, and Andrey Krylov Lomonosov Moscow State University, Moscow, Department of Computational Mathematics and Cybernetics, e-mail: nasonov@cs.msu.ru,
Lecture 3.3 Robust estimation with RANSAC. Thomas Opsahl
 Lecture 3.3 Robust estimation with RANSAC Thomas Opsahl Motivation If two perspective cameras captures an image of a planar scene, their images are related by a homography HH 2 Motivation If two perspective
Lecture 3.3 Robust estimation with RANSAC Thomas Opsahl Motivation If two perspective cameras captures an image of a planar scene, their images are related by a homography HH 2 Motivation If two perspective
Chapter 2 - Fundamentals. Comunicação Visual Interactiva
 Chapter - Fundamentals Comunicação Visual Interactiva Structure of the human eye (1) CVI Structure of the human eye () Celular structure of the retina. On the right we can see one cone between two groups
Chapter - Fundamentals Comunicação Visual Interactiva Structure of the human eye (1) CVI Structure of the human eye () Celular structure of the retina. On the right we can see one cone between two groups
Anti-aliasing. Images and Aliasing
 CS 130 Anti-aliasing Images and Aliasing Aliasing errors caused by rasterizing How to correct them, in general 2 1 Aliased Lines Stair stepping and jaggies 3 Remove the jaggies Anti-aliased Lines 4 2 Aliasing
CS 130 Anti-aliasing Images and Aliasing Aliasing errors caused by rasterizing How to correct them, in general 2 1 Aliased Lines Stair stepping and jaggies 3 Remove the jaggies Anti-aliased Lines 4 2 Aliasing
Segmentation and Tracking of Partial Planar Templates
 Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Midterm Examination CS 534: Computational Photography
 Midterm Examination CS 534: Computational Photography November 3, 2016 NAME: Problem Score Max Score 1 6 2 8 3 9 4 12 5 4 6 13 7 7 8 6 9 9 10 6 11 14 12 6 Total 100 1 of 8 1. [6] (a) [3] What camera setting(s)
Midterm Examination CS 534: Computational Photography November 3, 2016 NAME: Problem Score Max Score 1 6 2 8 3 9 4 12 5 4 6 13 7 7 8 6 9 9 10 6 11 14 12 6 Total 100 1 of 8 1. [6] (a) [3] What camera setting(s)
EXAM SOLUTIONS. Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006,
 School of Computer Science and Communication, KTH Danica Kragic EXAM SOLUTIONS Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006, 14.00 19.00 Grade table 0-25 U 26-35 3 36-45
School of Computer Science and Communication, KTH Danica Kragic EXAM SOLUTIONS Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006, 14.00 19.00 Grade table 0-25 U 26-35 3 36-45
Efficient Computation of Vanishing Points
 Efficient Computation of Vanishing Points Wei Zhang and Jana Kosecka 1 Department of Computer Science George Mason University, Fairfax, VA 223, USA {wzhang2, kosecka}@cs.gmu.edu Abstract Man-made environments
Efficient Computation of Vanishing Points Wei Zhang and Jana Kosecka 1 Department of Computer Science George Mason University, Fairfax, VA 223, USA {wzhang2, kosecka}@cs.gmu.edu Abstract Man-made environments
Image Processing. Filtering. Slide 1
 Image Processing Filtering Slide 1 Preliminary Image generation Original Noise Image restoration Result Slide 2 Preliminary Classic application: denoising However: Denoising is much more than a simple
Image Processing Filtering Slide 1 Preliminary Image generation Original Noise Image restoration Result Slide 2 Preliminary Classic application: denoising However: Denoising is much more than a simple
MA 323 Geometric Modelling Course Notes: Day 21 Three Dimensional Bezier Curves, Projections and Rational Bezier Curves
 MA 323 Geometric Modelling Course Notes: Day 21 Three Dimensional Bezier Curves, Projections and Rational Bezier Curves David L. Finn Over the next few days, we will be looking at extensions of Bezier
MA 323 Geometric Modelling Course Notes: Day 21 Three Dimensional Bezier Curves, Projections and Rational Bezier Curves David L. Finn Over the next few days, we will be looking at extensions of Bezier
The SIFT (Scale Invariant Feature
 The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
CPSC 425: Computer Vision
 1 / 55 CPSC 425: Computer Vision Instructor: Fred Tung ftung@cs.ubc.ca Department of Computer Science University of British Columbia Lecture Notes 2015/2016 Term 2 2 / 55 Menu January 12, 2016 Topics:
1 / 55 CPSC 425: Computer Vision Instructor: Fred Tung ftung@cs.ubc.ca Department of Computer Science University of British Columbia Lecture Notes 2015/2016 Term 2 2 / 55 Menu January 12, 2016 Topics:
A Summary of Projective Geometry
 A Summary of Projective Geometry Copyright 22 Acuity Technologies Inc. In the last years a unified approach to creating D models from multiple images has been developed by Beardsley[],Hartley[4,5,9],Torr[,6]
A Summary of Projective Geometry Copyright 22 Acuity Technologies Inc. In the last years a unified approach to creating D models from multiple images has been developed by Beardsley[],Hartley[4,5,9],Torr[,6]
Image restoration. Lecture 14. Milan Gavrilovic Centre for Image Analysis Uppsala University
 Image restoration Lecture 14 Milan Gavrilovic milan@cb.uu.se Centre for Image Analysis Uppsala University Computer Assisted Image Analysis 2009-05-08 M. Gavrilovic (Uppsala University) L14 Image restoration
Image restoration Lecture 14 Milan Gavrilovic milan@cb.uu.se Centre for Image Analysis Uppsala University Computer Assisted Image Analysis 2009-05-08 M. Gavrilovic (Uppsala University) L14 Image restoration
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014
 SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
Edge detection. Gradient-based edge operators
 Edge detection Gradient-based edge operators Prewitt Sobel Roberts Laplacian zero-crossings Canny edge detector Hough transform for detection of straight lines Circle Hough Transform Digital Image Processing:
Edge detection Gradient-based edge operators Prewitt Sobel Roberts Laplacian zero-crossings Canny edge detector Hough transform for detection of straight lines Circle Hough Transform Digital Image Processing:
An introduction to 3D image reconstruction and understanding concepts and ideas
 Introduction to 3D image reconstruction An introduction to 3D image reconstruction and understanding concepts and ideas Samuele Carli Martin Hellmich 5 febbraio 2013 1 icsc2013 Carli S. Hellmich M. (CERN)
Introduction to 3D image reconstruction An introduction to 3D image reconstruction and understanding concepts and ideas Samuele Carli Martin Hellmich 5 febbraio 2013 1 icsc2013 Carli S. Hellmich M. (CERN)
2 DETERMINING THE VANISHING POINT LOCA- TIONS
 IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL.??, NO.??, DATE 1 Equidistant Fish-Eye Calibration and Rectiication by Vanishing Point Extraction Abstract In this paper we describe
IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL.??, NO.??, DATE 1 Equidistant Fish-Eye Calibration and Rectiication by Vanishing Point Extraction Abstract In this paper we describe
Lecture 28 Intro to Tracking
 Lecture 28 Intro to Tracking Some overlap with T&V Section 8.4.2 and Appendix A.8 Recall: Blob Merge/Split merge occlusion occlusion split When two objects pass close to each other, they are detected as
Lecture 28 Intro to Tracking Some overlap with T&V Section 8.4.2 and Appendix A.8 Recall: Blob Merge/Split merge occlusion occlusion split When two objects pass close to each other, they are detected as
Vision Review: Image Formation. Course web page:
 Vision Review: Image Formation Course web page: www.cis.udel.edu/~cer/arv September 10, 2002 Announcements Lecture on Thursday will be about Matlab; next Tuesday will be Image Processing The dates some
Vision Review: Image Formation Course web page: www.cis.udel.edu/~cer/arv September 10, 2002 Announcements Lecture on Thursday will be about Matlab; next Tuesday will be Image Processing The dates some
Sparse & Redundant Representations and Their Applications in Signal and Image Processing
 Sparse & Redundant Representations and Their Applications in Signal and Image Processing Sparseland: An Estimation Point of View Michael Elad The Computer Science Department The Technion Israel Institute
Sparse & Redundant Representations and Their Applications in Signal and Image Processing Sparseland: An Estimation Point of View Michael Elad The Computer Science Department The Technion Israel Institute
Recall: Blob Merge/Split Lecture 28
 Recall: Blob Merge/Split Lecture 28 merge occlusion Intro to Tracking Some overlap with T&V Section 8.4.2 and Appendix A.8 occlusion split When two objects pass close to each other, they are detected as
Recall: Blob Merge/Split Lecture 28 merge occlusion Intro to Tracking Some overlap with T&V Section 8.4.2 and Appendix A.8 occlusion split When two objects pass close to each other, they are detected as
Geometry of image formation
 eometry of image formation Tomáš Svoboda, svoboda@cmp.felk.cvut.cz Czech Technical University in Prague, Center for Machine Perception http://cmp.felk.cvut.cz Last update: November 3, 2008 Talk Outline
eometry of image formation Tomáš Svoboda, svoboda@cmp.felk.cvut.cz Czech Technical University in Prague, Center for Machine Perception http://cmp.felk.cvut.cz Last update: November 3, 2008 Talk Outline
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
Basilio Bona DAUIN Politecnico di Torino
 ROBOTICA 03CFIOR DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 3 Laser sensors Rays are transmitted and received coaxially The target is illuminated by collimated rays The
ROBOTICA 03CFIOR DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 3 Laser sensors Rays are transmitted and received coaxially The target is illuminated by collimated rays The
Blind Image Deblurring Using Dark Channel Prior
 Blind Image Deblurring Using Dark Channel Prior Jinshan Pan 1,2,3, Deqing Sun 2,4, Hanspeter Pfister 2, and Ming-Hsuan Yang 3 1 Dalian University of Technology 2 Harvard University 3 UC Merced 4 NVIDIA
Blind Image Deblurring Using Dark Channel Prior Jinshan Pan 1,2,3, Deqing Sun 2,4, Hanspeter Pfister 2, and Ming-Hsuan Yang 3 1 Dalian University of Technology 2 Harvard University 3 UC Merced 4 NVIDIA
Reconstructing Images of Bar Codes for Construction Site Object Recognition 1
 Reconstructing Images of Bar Codes for Construction Site Object Recognition 1 by David E. Gilsinn 2, Geraldine S. Cheok 3, Dianne P. O Leary 4 ABSTRACT: This paper discusses a general approach to reconstructing
Reconstructing Images of Bar Codes for Construction Site Object Recognition 1 by David E. Gilsinn 2, Geraldine S. Cheok 3, Dianne P. O Leary 4 ABSTRACT: This paper discusses a general approach to reconstructing