navigation Isaac Skog
|
|
|
- Silvester Shepherd
- 6 years ago
- Views:
Transcription

1 Foot-mounted zerovelocity aided inertial navigation Isaac Skog
2 Course Outline 1. Foot-mounted inertial navigation a. Basic idea b. Pros and cons 2. Inertial navigation a. The inertial sensors b. The navigation equations c. Error propagation 3. Kalman filtering a. Direct filtering b. Complimentary filtering c. Pseudo observations and motion constraints 4. Zero-velocity detection a. Force sensitive resistors b. The SHOE detector c. Characteristics 5. The OpenShoe project a. Background and Goal b. Hardware/Software c. Demo

3 Basic idea behind foot-mounted inertial navigation 1. Mount (inertial) sensors in the sole of the shoes of a user 2. Measure the length and direction of the steps the users takes 3. Calculate the change in position via dead-reckoning. North p2 p3 p1 Heading East

4 Example: Output from a footmounted inertial navigation system
5 Pros and cons of foot-mounted inertial navigation Pros - Does not depend on any preinstalled infrastructure. - Can not be disturbed. - No motion constraints*. Cons - Initial position and heading most be known. - The position and heading error grows with time. * We assume that the foot becomes stationary on a regular basis
6 Inertial navigation Coordinate systems and rotations Sensors Navigation equations Error propagation
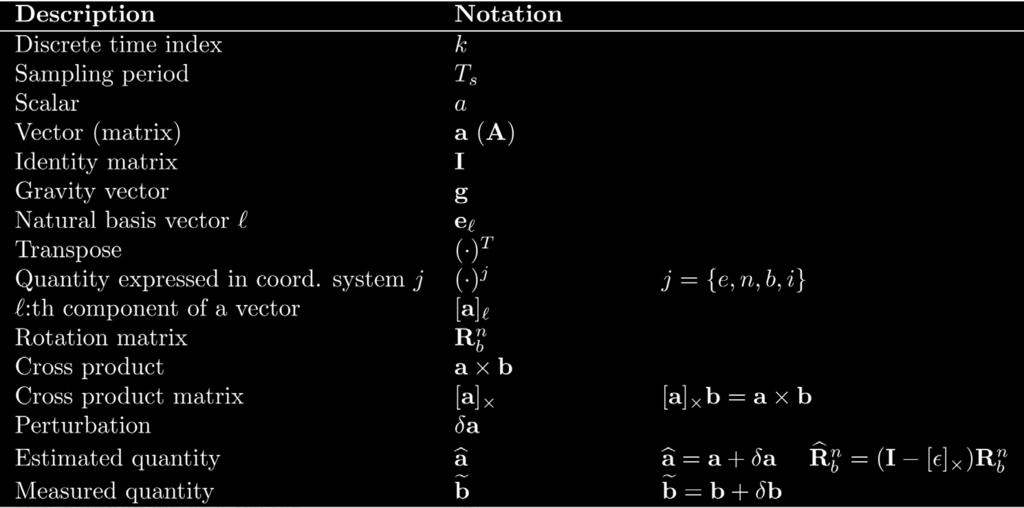
7 Notation


8 Coordinate systems and rotations INS Forward Pitch Roll Sideways Heading Down Body coordinate system and the three Euler angles. Orientation representation Earth centered inertial, earth centered earth fixed, and geographic coordinate system.
 coordinate")
9 Inertial measurement unit (IMU) IMU 3 Accelerometers 3 Gyroscopes Minimum requirements Sampling rate 100 Hz Accelerometer dynamic range Gyroscope dynamic range Body (or platform) coordinate system

10 The accelerometer and its output (1) Mass Stationary accelerometer Mass Mass Accelerometer accelerating to the right, and with the sensitivity axis orthogonal to the gravity field. Accelerometer stationary on the earth and with the sensitivity axis aligned with the gravity field.
11 The accelerometer and its output (2) The inertial and gravitational acceleration are indistinguishable to a accelerometer. The output of an accelerometer is called specific force, and includes both the inertial acceleration and the gravity acceleration. To calculate the inertial acceleration from the specific force output of an IMU we most know the IMUs orientation w.r.t. the geographic coordinate system.


12 Inertial navigation system (INS) INS IMU Navigation equations Gravity model Acc. + Position Gyro. Coriolis force Velocity Attitude



13 The navigation equations

14 Error propagation True orientation of the navigation and body coordinate system. Orientation of the estimated body coordinate system after t [s]. Position error as a function of time with a gyroscope bias of deg/s.

15 Error state space model
16 Kalman filtering and INSs Direct filtering Complementary filtering Feedback structure Pseudo observations and motion constraints





17 Direct filtering INS Velocity sensor KF Pros Simple filter structure. Cons It is difficult to model the motion dynamics in the KF framework. High computational load due to the high update rate of the INS.


18 Complementary filtering (feedforward) INS H + Velocity sensor + KF Pros The KF estimates the navigation state errors, which can be better modeled in the KF framework. The KF needs only to be updated at the sample rate of the velocity sensor. Cons Numerical problems with low-cost INS.

19 Complementary filtering (feedback) INS H KF + Velocity sensor Pros The KF estimates the navigation state errors, which can be better modeled in the KF framework. The KF needs only to be updated at the sample rate of the velocity sensor. Cons If something goes wrong in the error estimation, the navigation solution can be destroyed for all time.


20 Zero-velocity updates Pseudo velocity sensor The system is stationary! +



21 The zero-velocity aided INS Kalman filter structure. IMU Navigation equations Detector decision Zero-velocity detector Kalman filter


22 Pseudo code for the KF based zerovelocity aided INS
23 Zero-velocity detection Force sensitive resistors as a detector Zero-velocity detection using IMU data The SHOE detector


24 Force sensitive resistors (FSR) as zero-velocity detector Drawbacks Sensitive to mechanical fatigue Threshold is weight dependent Only works when pressure is applied


25 Zero-velocity detection using IMU data Zero-velocity detector IMU Data buffer Test statistics Threshold Decision When the system is stationary, then The SHOE detector The specific force measured by the accelerometers is equal to the gravitation acceleration, whose magnitude is known. The attitude of the IMU is constant, i.e., the angular rate experienced by the IMU is zero.

26 Position error as a function of the detector settings.
27 The OpenShoe project Introduction Hardware Software Demo
28 OpenShoe Foot-mounted INS for Every Foot OpenShoe is an open source embedded foot-mounted INS implementation including both hardware and software design.




29 Hardware IMU Microcontroller board Casing Embedded system

30 Software Real time processing Matlab control scripts Code convertion Algorithm test framework Algorithm testing Openshoe Matlab Toolbox Openshoe runtime framework Navigation algorithms Navigation algorithms C code running on the microcontroller Matlab scripts
Navigational Aids 1 st Semester/2007/TF 7:30 PM -9:00 PM
 Glossary of Navigation Terms accelerometer. A device that senses inertial reaction to measure linear or angular acceleration. In its simplest form, it consists of a case-mounted spring and mass arrangement
Glossary of Navigation Terms accelerometer. A device that senses inertial reaction to measure linear or angular acceleration. In its simplest form, it consists of a case-mounted spring and mass arrangement
(1) and s k ωk. p k vk q
 and s k ωk. p k vk q") Sensing and Perception: Localization and positioning Isaac Sog Project Assignment: GNSS aided INS In this project assignment you will wor with a type of navigation system referred to as a global navigation
Sensing and Perception: Localization and positioning Isaac Sog Project Assignment: GNSS aided INS In this project assignment you will wor with a type of navigation system referred to as a global navigation
Inertial Navigation Systems
 Inertial Navigation Systems Kiril Alexiev University of Pavia March 2017 1 /89 Navigation Estimate the position and orientation. Inertial navigation one of possible instruments. Newton law is used: F =
Inertial Navigation Systems Kiril Alexiev University of Pavia March 2017 1 /89 Navigation Estimate the position and orientation. Inertial navigation one of possible instruments. Newton law is used: F =
Testing the Possibilities of Using IMUs with Different Types of Movements
 137 Testing the Possibilities of Using IMUs with Different Types of Movements Kajánek, P. and Kopáčik A. Slovak University of Technology, Faculty of Civil Engineering, Radlinského 11, 81368 Bratislava,
137 Testing the Possibilities of Using IMUs with Different Types of Movements Kajánek, P. and Kopáčik A. Slovak University of Technology, Faculty of Civil Engineering, Radlinského 11, 81368 Bratislava,
Introduction to Inertial Navigation (INS tutorial short)
") Introduction to Inertial Navigation (INS tutorial short) Note 1: This is a short (20 pages) tutorial. An extended (57 pages) tutorial that also includes Kalman filtering is available at http://www.navlab.net/publications/introduction_to
Introduction to Inertial Navigation (INS tutorial short) Note 1: This is a short (20 pages) tutorial. An extended (57 pages) tutorial that also includes Kalman filtering is available at http://www.navlab.net/publications/introduction_to
DYNAMIC POSITIONING CONFERENCE September 16-17, Sensors
 DYNAMIC POSITIONING CONFERENCE September 16-17, 2003 Sensors An Integrated acoustic positioning and inertial navigation system Jan Erik Faugstadmo, Hans Petter Jacobsen Kongsberg Simrad, Norway Revisions
DYNAMIC POSITIONING CONFERENCE September 16-17, 2003 Sensors An Integrated acoustic positioning and inertial navigation system Jan Erik Faugstadmo, Hans Petter Jacobsen Kongsberg Simrad, Norway Revisions
E80. Experimental Engineering. Lecture 9 Inertial Measurement
 Lecture 9 Inertial Measurement http://www.volker-doormann.org/physics.htm Feb. 19, 2013 Christopher M. Clark Where is the rocket? Outline Sensors People Accelerometers Gyroscopes Representations State
Lecture 9 Inertial Measurement http://www.volker-doormann.org/physics.htm Feb. 19, 2013 Christopher M. Clark Where is the rocket? Outline Sensors People Accelerometers Gyroscopes Representations State
Lecture 13 Visual Inertial Fusion
 Lecture 13 Visual Inertial Fusion Davide Scaramuzza Course Evaluation Please fill the evaluation form you received by email! Provide feedback on Exercises: good and bad Course: good and bad How to improve
Lecture 13 Visual Inertial Fusion Davide Scaramuzza Course Evaluation Please fill the evaluation form you received by email! Provide feedback on Exercises: good and bad Course: good and bad How to improve
Autonomous Navigation for Flying Robots
 Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 3.2: Sensors Jürgen Sturm Technische Universität München Sensors IMUs (inertial measurement units) Accelerometers
Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 3.2: Sensors Jürgen Sturm Technische Universität München Sensors IMUs (inertial measurement units) Accelerometers
An Intro to Gyros. FTC Team #6832. Science and Engineering Magnet - Dallas ISD
 An Intro to Gyros FTC Team #6832 Science and Engineering Magnet - Dallas ISD Gyro Types - Mechanical Hubble Gyro Unit Gyro Types - Sensors Low cost MEMS Gyros High End Gyros Ring laser, fiber optic, hemispherical
An Intro to Gyros FTC Team #6832 Science and Engineering Magnet - Dallas ISD Gyro Types - Mechanical Hubble Gyro Unit Gyro Types - Sensors Low cost MEMS Gyros High End Gyros Ring laser, fiber optic, hemispherical
Inertial Measurement Units I!
 ! Inertial Measurement Units I! Gordon Wetzstein! Stanford University! EE 267 Virtual Reality! Lecture 9! stanford.edu/class/ee267/!! Lecture Overview! coordinate systems (world, body/sensor, inertial,
! Inertial Measurement Units I! Gordon Wetzstein! Stanford University! EE 267 Virtual Reality! Lecture 9! stanford.edu/class/ee267/!! Lecture Overview! coordinate systems (world, body/sensor, inertial,
GNSS-aided INS for land vehicle positioning and navigation
 Thesis for the degree of Licentiate of Engineering GNSS-aided INS for land vehicle positioning and navigation Isaac Skog Signal Processing School of Electrical Engineering KTH (Royal Institute of Technology)
Thesis for the degree of Licentiate of Engineering GNSS-aided INS for land vehicle positioning and navigation Isaac Skog Signal Processing School of Electrical Engineering KTH (Royal Institute of Technology)
Satellite Attitude Determination
 Satellite Attitude Determination AERO4701 Space Engineering 3 Week 5 Last Week Looked at GPS signals and pseudorange error terms Looked at GPS positioning from pseudorange data Looked at GPS error sources,
Satellite Attitude Determination AERO4701 Space Engineering 3 Week 5 Last Week Looked at GPS signals and pseudorange error terms Looked at GPS positioning from pseudorange data Looked at GPS error sources,
ROTATING IMU FOR PEDESTRIAN NAVIGATION
 ROTATING IMU FOR PEDESTRIAN NAVIGATION ABSTRACT Khairi Abdulrahim Faculty of Science and Technology Universiti Sains Islam Malaysia (USIM) Malaysia A pedestrian navigation system using a low-cost inertial
ROTATING IMU FOR PEDESTRIAN NAVIGATION ABSTRACT Khairi Abdulrahim Faculty of Science and Technology Universiti Sains Islam Malaysia (USIM) Malaysia A pedestrian navigation system using a low-cost inertial
This was written by a designer of inertial guidance machines, & is correct. **********************************************************************
 EXPLANATORY NOTES ON THE SIMPLE INERTIAL NAVIGATION MACHINE How does the missile know where it is at all times? It knows this because it knows where it isn't. By subtracting where it is from where it isn't
EXPLANATORY NOTES ON THE SIMPLE INERTIAL NAVIGATION MACHINE How does the missile know where it is at all times? It knows this because it knows where it isn't. By subtracting where it is from where it isn't
ADVANTAGES OF INS CONTROL SYSTEMS
 ADVANTAGES OF INS CONTROL SYSTEMS Pavol BOŽEK A, Aleksander I. KORŠUNOV B A Institute of Applied Informatics, Automation and Mathematics, Faculty of Material Science and Technology, Slovak University of
ADVANTAGES OF INS CONTROL SYSTEMS Pavol BOŽEK A, Aleksander I. KORŠUNOV B A Institute of Applied Informatics, Automation and Mathematics, Faculty of Material Science and Technology, Slovak University of
Indoor navigation using smartphones. Chris Hide IESSG, University of Nottingham, UK
 Indoor navigation using smartphones Chris Hide IESSG, University of Nottingham, UK Overview Smartphones Available sensors Current positioning methods Positioning research at IESSG 1. Wi-Fi fingerprinting
Indoor navigation using smartphones Chris Hide IESSG, University of Nottingham, UK Overview Smartphones Available sensors Current positioning methods Positioning research at IESSG 1. Wi-Fi fingerprinting
INTEGRATED TECH FOR INDUSTRIAL POSITIONING
 INTEGRATED TECH FOR INDUSTRIAL POSITIONING Integrated Tech for Industrial Positioning aerospace.honeywell.com 1 Introduction We are the world leader in precision IMU technology and have built the majority
INTEGRATED TECH FOR INDUSTRIAL POSITIONING Integrated Tech for Industrial Positioning aerospace.honeywell.com 1 Introduction We are the world leader in precision IMU technology and have built the majority
TEST RESULTS OF A GPS/INERTIAL NAVIGATION SYSTEM USING A LOW COST MEMS IMU
 TEST RESULTS OF A GPS/INERTIAL NAVIGATION SYSTEM USING A LOW COST MEMS IMU Alison K. Brown, Ph.D.* NAVSYS Corporation, 1496 Woodcarver Road, Colorado Springs, CO 891 USA, e-mail: abrown@navsys.com Abstract
TEST RESULTS OF A GPS/INERTIAL NAVIGATION SYSTEM USING A LOW COST MEMS IMU Alison K. Brown, Ph.D.* NAVSYS Corporation, 1496 Woodcarver Road, Colorado Springs, CO 891 USA, e-mail: abrown@navsys.com Abstract
Estimation of Altitude and Vertical Velocity for Multirotor Aerial Vehicle using Kalman Filter
 Estimation of Altitude and Vertical Velocity for Multirotor Aerial Vehicle using Kalman Filter Przemys law G asior, Stanis law Gardecki, Jaros law Gośliński and Wojciech Giernacki Poznan University of
Estimation of Altitude and Vertical Velocity for Multirotor Aerial Vehicle using Kalman Filter Przemys law G asior, Stanis law Gardecki, Jaros law Gośliński and Wojciech Giernacki Poznan University of
EE 570: Location and Navigation: Theory & Practice
 EE 570: Location and Navigation: Theory & Practice Navigation Sensors and INS Mechanization Thursday 14 Feb 2013 NMT EE 570: Location and Navigation: Theory & Practice Slide 1 of 14 Inertial Sensor Modeling
EE 570: Location and Navigation: Theory & Practice Navigation Sensors and INS Mechanization Thursday 14 Feb 2013 NMT EE 570: Location and Navigation: Theory & Practice Slide 1 of 14 Inertial Sensor Modeling
Application Note: MatLab data processing for Motion Capture. Zhichao Lu Team 8 Documents Prep. Date: April 5, 2013
 Application Note: MatLab data processing for Motion Capture Zhichao Lu Team 8 Documents Prep. Date: April 5, 2013 Executive Summary This application note is a tutorial that guides users through how to
Application Note: MatLab data processing for Motion Capture Zhichao Lu Team 8 Documents Prep. Date: April 5, 2013 Executive Summary This application note is a tutorial that guides users through how to
Evaluation and Comparison of Performance Analysis of Indoor Inertial Navigation system Based on Foot Mounted IMU
 Evaluation and Comparison of Performance Analysis of Indoor Inertial Navigation system Based on Foot Mounted IMU Feyissa Woyano ab, Soyeon Lee b, Sangjoon Park ab a Department of Computer Software and,
Evaluation and Comparison of Performance Analysis of Indoor Inertial Navigation system Based on Foot Mounted IMU Feyissa Woyano ab, Soyeon Lee b, Sangjoon Park ab a Department of Computer Software and,
Camera Drones Lecture 2 Control and Sensors
 Camera Drones Lecture 2 Control and Sensors Ass.Prof. Friedrich Fraundorfer WS 2017 1 Outline Quadrotor control principles Sensors 2 Quadrotor control - Hovering Hovering means quadrotor needs to hold
Camera Drones Lecture 2 Control and Sensors Ass.Prof. Friedrich Fraundorfer WS 2017 1 Outline Quadrotor control principles Sensors 2 Quadrotor control - Hovering Hovering means quadrotor needs to hold
Strapdown Inertial Navigation Technology
 Strapdown Inertial Navigation Technology 2nd Edition David Titterton and John Weston The Institution of Engineering and Technology Preface xv 1 Introduction 1 1.1 Navigation 1 1.2 Inertial navigation 2
Strapdown Inertial Navigation Technology 2nd Edition David Titterton and John Weston The Institution of Engineering and Technology Preface xv 1 Introduction 1 1.1 Navigation 1 1.2 Inertial navigation 2
Dynamic Modelling for MEMS-IMU/Magnetometer Integrated Attitude and Heading Reference System
 International Global Navigation Satellite Systems Society IGNSS Symposium 211 University of New South Wales, Sydney, NSW, Australia 15 17 November, 211 Dynamic Modelling for MEMS-IMU/Magnetometer Integrated
International Global Navigation Satellite Systems Society IGNSS Symposium 211 University of New South Wales, Sydney, NSW, Australia 15 17 November, 211 Dynamic Modelling for MEMS-IMU/Magnetometer Integrated
Strapdown Inertial Navigation Technology, Second Edition D. H. Titterton J. L. Weston
 Strapdown Inertial Navigation Technology, Second Edition D. H. Titterton J. L. Weston NavtechGPS Part #1147 Progress in Astronautics and Aeronautics Series, 207 Published by AIAA, 2004, Revised, 2nd Edition,
Strapdown Inertial Navigation Technology, Second Edition D. H. Titterton J. L. Weston NavtechGPS Part #1147 Progress in Astronautics and Aeronautics Series, 207 Published by AIAA, 2004, Revised, 2nd Edition,
Introduction to Inertial Navigation and Kalman filtering
 Introduction to Inertial Navigation and Kalman filtering INS Tutorial, Norwegian Space Centre 2008.06.09 Kenneth Gade, FFI Outline Notation Inertial navigation Aided inertial navigation system (AINS) Implementing
Introduction to Inertial Navigation and Kalman filtering INS Tutorial, Norwegian Space Centre 2008.06.09 Kenneth Gade, FFI Outline Notation Inertial navigation Aided inertial navigation system (AINS) Implementing
Satellite and Inertial Navigation and Positioning System
 Satellite and Inertial Navigation and Positioning System Project Proposal By: Luke Pfister Dan Monroe Project Advisors: Dr. In Soo Ahn Dr. Yufeng Lu EE 451 Senior Capstone Project December 10, 2009 PROJECT
Satellite and Inertial Navigation and Positioning System Project Proposal By: Luke Pfister Dan Monroe Project Advisors: Dr. In Soo Ahn Dr. Yufeng Lu EE 451 Senior Capstone Project December 10, 2009 PROJECT
Embedded Navigation Solutions VN-100 User Manual
 Embedded Navigation Solutions VN-100 User Manual Firmware v2.1.0.0 Document Revision 2.23 UM001 1 Document Information Title VN-100 User Manual Subtitle Inertial Navigation Modules Document Type User Manual
Embedded Navigation Solutions VN-100 User Manual Firmware v2.1.0.0 Document Revision 2.23 UM001 1 Document Information Title VN-100 User Manual Subtitle Inertial Navigation Modules Document Type User Manual
Inflight Alignment Simulation using Matlab Simulink
 Inflight Alignment Simulation using Matlab Simulink Authors, K. Chandana, Soumi Chakraborty, Saumya Shanker, R.S. Chandra Sekhar, G. Satheesh Reddy. RCI /DRDO.. 2012 The MathWorks, Inc. 1 Agenda with Challenging
Inflight Alignment Simulation using Matlab Simulink Authors, K. Chandana, Soumi Chakraborty, Saumya Shanker, R.S. Chandra Sekhar, G. Satheesh Reddy. RCI /DRDO.. 2012 The MathWorks, Inc. 1 Agenda with Challenging
Inertial Navigation Static Calibration
 INTL JOURNAL OF ELECTRONICS AND TELECOMMUNICATIONS, 2018, VOL. 64, NO. 2, PP. 243 248 Manuscript received December 2, 2017; revised April, 2018. DOI: 10.24425/119518 Inertial Navigation Static Calibration
INTL JOURNAL OF ELECTRONICS AND TELECOMMUNICATIONS, 2018, VOL. 64, NO. 2, PP. 243 248 Manuscript received December 2, 2017; revised April, 2018. DOI: 10.24425/119518 Inertial Navigation Static Calibration
Selection and Integration of Sensors Alex Spitzer 11/23/14
 Selection and Integration of Sensors Alex Spitzer aes368@cornell.edu 11/23/14 Sensors Perception of the outside world Cameras, DVL, Sonar, Pressure Accelerometers, Gyroscopes, Magnetometers Position vs
Selection and Integration of Sensors Alex Spitzer aes368@cornell.edu 11/23/14 Sensors Perception of the outside world Cameras, DVL, Sonar, Pressure Accelerometers, Gyroscopes, Magnetometers Position vs
Strapdown inertial navigation technology
 Strapdown inertial navigation technology D. H. Titterton and J. L. Weston Peter Peregrinus Ltd. on behalf of the Institution of Electrical Engineers Contents Preface Page xiii 1 Introduction 1 1.1 Navigation
Strapdown inertial navigation technology D. H. Titterton and J. L. Weston Peter Peregrinus Ltd. on behalf of the Institution of Electrical Engineers Contents Preface Page xiii 1 Introduction 1 1.1 Navigation
Line of Sight Stabilization Primer Table of Contents
 Line of Sight Stabilization Primer Table of Contents Preface 1 Chapter 1.0 Introduction 3 Chapter 2.0 LOS Control Architecture and Design 11 2.1 Direct LOS Stabilization 15 2.2 Indirect LOS Stabilization
Line of Sight Stabilization Primer Table of Contents Preface 1 Chapter 1.0 Introduction 3 Chapter 2.0 LOS Control Architecture and Design 11 2.1 Direct LOS Stabilization 15 2.2 Indirect LOS Stabilization
Orientation Capture of a Walker s Leg Using Inexpensive Inertial Sensors with Optimized Complementary Filter Design
 Orientation Capture of a Walker s Leg Using Inexpensive Inertial Sensors with Optimized Complementary Filter Design Sebastian Andersson School of Software Engineering Tongji University Shanghai, China
Orientation Capture of a Walker s Leg Using Inexpensive Inertial Sensors with Optimized Complementary Filter Design Sebastian Andersson School of Software Engineering Tongji University Shanghai, China
COARSE LEVELING OF INS ATTITUDE UNDER DYNAMIC TRAJECTORY CONDITIONS. Paul G. Savage Strapdown Associates, Inc.
 COARSE LEVELIG OF IS ATTITUDE UDER DYAMIC TRAJECTORY CODITIOS Paul G. Savage Strapdown Associates, Inc. SAI-W-147 www.strapdownassociates.com January 28, 215 ASTRACT Approximate attitude initialization
COARSE LEVELIG OF IS ATTITUDE UDER DYAMIC TRAJECTORY CODITIOS Paul G. Savage Strapdown Associates, Inc. SAI-W-147 www.strapdownassociates.com January 28, 215 ASTRACT Approximate attitude initialization
APN-080: SPAN Data Collection Recommendations
 APN-080: SPAN Data Collection Recommendations APN-080 0A January 2018 Table of Contents Chapter 1 Overview 1.1 IMU Type 3 Chapter 2 INS Alignment 2.1 INS Alignment Environment 4 2.2 INS Alignment Quality
APN-080: SPAN Data Collection Recommendations APN-080 0A January 2018 Table of Contents Chapter 1 Overview 1.1 IMU Type 3 Chapter 2 INS Alignment 2.1 INS Alignment Environment 4 2.2 INS Alignment Quality
Use of Image aided Navigation for UAV Navigation and Target Geolocation in Urban and GPS denied Environments
 Use of Image aided Navigation for UAV Navigation and Target Geolocation in Urban and GPS denied Environments Precision Strike Technology Symposium Alison K. Brown, Ph.D. NAVSYS Corporation, Colorado Phone:
Use of Image aided Navigation for UAV Navigation and Target Geolocation in Urban and GPS denied Environments Precision Strike Technology Symposium Alison K. Brown, Ph.D. NAVSYS Corporation, Colorado Phone:
Electronics Design Contest 2016 Wearable Controller VLSI Category Participant guidance
 Electronics Design Contest 2016 Wearable Controller VLSI Category Participant guidance June 27, 2016 Wearable Controller is a wearable device that can gather data from person that wears it. Those data
Electronics Design Contest 2016 Wearable Controller VLSI Category Participant guidance June 27, 2016 Wearable Controller is a wearable device that can gather data from person that wears it. Those data
DriftLess Technology to improve inertial sensors
 Slide 1 of 19 DriftLess Technology to improve inertial sensors Marcel Ruizenaar, TNO marcel.ruizenaar@tno.nl Slide 2 of 19 Topics Problem, Drift in INS due to bias DriftLess technology What is it How it
Slide 1 of 19 DriftLess Technology to improve inertial sensors Marcel Ruizenaar, TNO marcel.ruizenaar@tno.nl Slide 2 of 19 Topics Problem, Drift in INS due to bias DriftLess technology What is it How it
Strapdown Inertial Navigation Technology. Second Edition. Volume 207 PROGRESS IN ASTRONAUTICS AND AERONAUTICS
 Strapdown Inertial Navigation Technology Second Edition D. H. Titterton Technical leader in Laser Systems at the Defence Science and Technology Laboratory (DSTL) Hampshire, UK J. L. Weston Principal Scientist
Strapdown Inertial Navigation Technology Second Edition D. H. Titterton Technical leader in Laser Systems at the Defence Science and Technology Laboratory (DSTL) Hampshire, UK J. L. Weston Principal Scientist
Quaternion Kalman Filter Design Based on MEMS Sensors
 , pp.93-97 http://dx.doi.org/10.14257/astl.2014.76.20 Quaternion Kalman Filter Design Based on MEMS Sensors Su zhongbin,yanglei, Kong Qingming School of Electrical and Information. Northeast Agricultural
, pp.93-97 http://dx.doi.org/10.14257/astl.2014.76.20 Quaternion Kalman Filter Design Based on MEMS Sensors Su zhongbin,yanglei, Kong Qingming School of Electrical and Information. Northeast Agricultural
Inertial Measurement Units II!
 ! Inertial Measurement Units II! Gordon Wetzstein! Stanford University! EE 267 Virtual Reality! Lecture 10! stanford.edu/class/ee267/!! wikipedia! Polynesian Migration! Lecture Overview! short review of
! Inertial Measurement Units II! Gordon Wetzstein! Stanford University! EE 267 Virtual Reality! Lecture 10! stanford.edu/class/ee267/!! wikipedia! Polynesian Migration! Lecture Overview! short review of
CHAPTER 2 SENSOR DATA SIMULATION: A KINEMATIC APPROACH
 27 CHAPTER 2 SENSOR DATA SIMULATION: A KINEMATIC APPROACH 2.1 INTRODUCTION The standard technique of generating sensor data for navigation is the dynamic approach. As revealed in the literature (John Blakelock
27 CHAPTER 2 SENSOR DATA SIMULATION: A KINEMATIC APPROACH 2.1 INTRODUCTION The standard technique of generating sensor data for navigation is the dynamic approach. As revealed in the literature (John Blakelock
Pedestrian Navigation System Using. Shoe-mounted INS. By Yan Li. A thesis submitted for the degree of Master of Engineering (Research)
") Pedestrian Navigation System Using Shoe-mounted INS By Yan Li A thesis submitted for the degree of Master of Engineering (Research) Faculty of Engineering and Information Technology University of Technology,
Pedestrian Navigation System Using Shoe-mounted INS By Yan Li A thesis submitted for the degree of Master of Engineering (Research) Faculty of Engineering and Information Technology University of Technology,
Calibration of Inertial Measurement Units Using Pendulum Motion
 Technical Paper Int l J. of Aeronautical & Space Sci. 11(3), 234 239 (2010) DOI:10.5139/IJASS.2010.11.3.234 Calibration of Inertial Measurement Units Using Pendulum Motion Keeyoung Choi* and Se-ah Jang**
Technical Paper Int l J. of Aeronautical & Space Sci. 11(3), 234 239 (2010) DOI:10.5139/IJASS.2010.11.3.234 Calibration of Inertial Measurement Units Using Pendulum Motion Keeyoung Choi* and Se-ah Jang**
DEVELOPMENT OF A PEDESTRIAN INDOOR NAVIGATION SYSTEM BASED ON MULTI-SENSOR FUSION AND FUZZY LOGIC ESTIMATION ALGORITHMS
 The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Volume XL-4/W5, 215 Indoor-Outdoor Seamless Modelling, Mapping and Navigation, 21 22 May 215, Tokyo, Japan
The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Volume XL-4/W5, 215 Indoor-Outdoor Seamless Modelling, Mapping and Navigation, 21 22 May 215, Tokyo, Japan
Strapdown system technology
 Chapter 9 Strapdown system technology 9.1 Introduction The preceding chapters have described the fundamental principles of strapdown navigation systems and the sensors required to provide the necessary
Chapter 9 Strapdown system technology 9.1 Introduction The preceding chapters have described the fundamental principles of strapdown navigation systems and the sensors required to provide the necessary
Performance Evaluation of INS Based MEMES Inertial Measurement Unit
 Int'l Journal of Computing, Communications & Instrumentation Engg. (IJCCIE) Vol. 2, Issue 1 (215) ISSN 2349-1469 EISSN 2349-1477 Performance Evaluation of Based MEMES Inertial Measurement Unit Othman Maklouf
Int'l Journal of Computing, Communications & Instrumentation Engg. (IJCCIE) Vol. 2, Issue 1 (215) ISSN 2349-1469 EISSN 2349-1477 Performance Evaluation of Based MEMES Inertial Measurement Unit Othman Maklouf
Collaboration is encouraged among small groups (e.g., 2-3 students).
.") Assignments Policies You must typeset, choices: Word (very easy to type math expressions) Latex (very easy to type math expressions) Google doc Plain text + math formula Your favorite text/doc editor Submit
Assignments Policies You must typeset, choices: Word (very easy to type math expressions) Latex (very easy to type math expressions) Google doc Plain text + math formula Your favorite text/doc editor Submit
Camera and Inertial Sensor Fusion
 January 6, 2018 For First Robotics 2018 Camera and Inertial Sensor Fusion David Zhang david.chao.zhang@gmail.com Version 4.1 1 My Background Ph.D. of Physics - Penn State Univ. Research scientist at SRI
January 6, 2018 For First Robotics 2018 Camera and Inertial Sensor Fusion David Zhang david.chao.zhang@gmail.com Version 4.1 1 My Background Ph.D. of Physics - Penn State Univ. Research scientist at SRI
Development of a Ground Based Cooperating Spacecraft Testbed for Research and Education
 DIPARTIMENTO DI INGEGNERIA INDUSTRIALE Development of a Ground Based Cooperating Spacecraft Testbed for Research and Education Mattia Mazzucato, Sergio Tronco, Andrea Valmorbida, Fabio Scibona and Enrico
DIPARTIMENTO DI INGEGNERIA INDUSTRIALE Development of a Ground Based Cooperating Spacecraft Testbed for Research and Education Mattia Mazzucato, Sergio Tronco, Andrea Valmorbida, Fabio Scibona and Enrico
EE 570: Location and Navigation: Theory & Practice
 EE 570: Location and Navigation: Theory & Practice Navigation Mathematics Tuesday 15 Jan 2013 NMT EE 570: Location and Navigation: Theory & Practice Slide 1 of 14 Coordinate Frames - ECI The Earth-Centered
EE 570: Location and Navigation: Theory & Practice Navigation Mathematics Tuesday 15 Jan 2013 NMT EE 570: Location and Navigation: Theory & Practice Slide 1 of 14 Coordinate Frames - ECI The Earth-Centered
4INERTIAL NAVIGATION CHAPTER 20. INTRODUCTION TO INERTIAL NAVIGATION...333
 4INERTIAL NAVIGATION CHAPTER 20. INTRODUCTION TO INERTIAL NAVIGATION...333 4 CHAPTER 20 INTRODUCTION TO INERTIAL NAVIGATION INTRODUCTION 2000. Background Inertial navigation is the process of measuring
4INERTIAL NAVIGATION CHAPTER 20. INTRODUCTION TO INERTIAL NAVIGATION...333 4 CHAPTER 20 INTRODUCTION TO INERTIAL NAVIGATION INTRODUCTION 2000. Background Inertial navigation is the process of measuring
Mio- x AHRS. Attitude and Heading Reference System. Engineering Specifications
 General Description Mio- x AHRS Attitude and Heading Reference System Engineering Specifications Rev. G 2012-05-29 Mio-x AHRS is a tiny sensormodule consists of 9 degree of freedom motion sensors (3 accelerometers,
General Description Mio- x AHRS Attitude and Heading Reference System Engineering Specifications Rev. G 2012-05-29 Mio-x AHRS is a tiny sensormodule consists of 9 degree of freedom motion sensors (3 accelerometers,
MULTI-SENSOR DATA FUSION FOR LAND VEHICLE ATTITUDE ESTIMATION USING A FUZZY EXPERT SYSTEM
 Data Science Journal, Volume 4, 28 November 2005 127 MULTI-SENSOR DATA FUSION FOR LAND VEHICLE ATTITUDE ESTIMATION USING A FUZZY EXPERT SYSTEM Jau-Hsiung Wang* and Yang Gao Department of Geomatics Engineering,
Data Science Journal, Volume 4, 28 November 2005 127 MULTI-SENSOR DATA FUSION FOR LAND VEHICLE ATTITUDE ESTIMATION USING A FUZZY EXPERT SYSTEM Jau-Hsiung Wang* and Yang Gao Department of Geomatics Engineering,
oblu - Integration Guide R&D Centre: GT Silicon Pvt Ltd 171 MIG, Awadhpuri, Block B, Lakhanpur Kanpur (UP), India, PIN
, India, PIN") oblu IntegrationGuide Revision 1.0 R&D Centre: GT Silicon Pvt Ltd 171 MIG, Awadhpuri, Block B, Lakhanpur Kanpur (UP), India, PIN 208024 Tel: +91 512 258 0039 Mobile: +91-700-741-0690 Email: hello@oblu.io
oblu IntegrationGuide Revision 1.0 R&D Centre: GT Silicon Pvt Ltd 171 MIG, Awadhpuri, Block B, Lakhanpur Kanpur (UP), India, PIN 208024 Tel: +91 512 258 0039 Mobile: +91-700-741-0690 Email: hello@oblu.io
Satellite/Inertial Navigation and Positioning System (SINAPS)
") Satellite/Inertial Navigation and Positioning System (SINAPS) Functional Requirements List and Performance Specifications by Daniel Monroe, Luke Pfister Advised By Drs. In Soo Ahn and Yufeng Lu ECE Department
Satellite/Inertial Navigation and Positioning System (SINAPS) Functional Requirements List and Performance Specifications by Daniel Monroe, Luke Pfister Advised By Drs. In Soo Ahn and Yufeng Lu ECE Department
9 Degrees of Freedom Inertial Measurement Unit with AHRS [RKI-1430]
![9 Degrees of Freedom Inertial Measurement Unit with AHRS [RKI-1430]](/thumbs/86/94257860.jpg "9 Degrees of Freedom Inertial Measurement Unit with AHRS [RKI-1430]") 9 Degrees of Freedom Inertial Measurement Unit with AHRS [RKI-1430] Users Manual Robokits India info@robokits.co.in http://www.robokitsworld.com Page 1 This 9 Degrees of Freedom (DOF) Inertial Measurement
9 Degrees of Freedom Inertial Measurement Unit with AHRS [RKI-1430] Users Manual Robokits India info@robokits.co.in http://www.robokitsworld.com Page 1 This 9 Degrees of Freedom (DOF) Inertial Measurement
CHARACTERIZATION AND CALIBRATION OF MEMS INERTIAL MEASUREMENT UNITS
 CHARACTERIZATION AND CALIBRATION OF MEMS INERTIAL MEASUREMENT UNITS ökçen Aslan 1,2, Afşar Saranlı 2 1 Defence Research and Development Institute (SAE), TÜBİTAK 2 Dept. of Electrical and Electronics Eng.,
CHARACTERIZATION AND CALIBRATION OF MEMS INERTIAL MEASUREMENT UNITS ökçen Aslan 1,2, Afşar Saranlı 2 1 Defence Research and Development Institute (SAE), TÜBİTAK 2 Dept. of Electrical and Electronics Eng.,
Real Time Implementation of a Low-Cost INS/GPS System Using xpc Target
 Real Time Implementation of a Low-Cost INS/GPS System Using xpc Target José Adalberto França and Jorge Audrin Morgado Abstract A Low Cost INS/GPS system (Inertial Navigation System / Global Positioning
Real Time Implementation of a Low-Cost INS/GPS System Using xpc Target José Adalberto França and Jorge Audrin Morgado Abstract A Low Cost INS/GPS system (Inertial Navigation System / Global Positioning
3D Motion Tracking by Inertial and Magnetic sensors with or without GPS
 3D Motion Tracking by Inertial and Magnetic sensors with or without GPS Junping Cai M.Sc. E. E, PhD junping@mci.sdu.dk Centre for Product Development (CPD) Mads Clausen Institute (MCI) University of Southern
3D Motion Tracking by Inertial and Magnetic sensors with or without GPS Junping Cai M.Sc. E. E, PhD junping@mci.sdu.dk Centre for Product Development (CPD) Mads Clausen Institute (MCI) University of Southern
Mobile Robotics. Mathematics, Models, and Methods. HI Cambridge. Alonzo Kelly. Carnegie Mellon University UNIVERSITY PRESS
 Mobile Robotics Mathematics, Models, and Methods Alonzo Kelly Carnegie Mellon University HI Cambridge UNIVERSITY PRESS Contents Preface page xiii 1 Introduction 1 1.1 Applications of Mobile Robots 2 1.2
Mobile Robotics Mathematics, Models, and Methods Alonzo Kelly Carnegie Mellon University HI Cambridge UNIVERSITY PRESS Contents Preface page xiii 1 Introduction 1 1.1 Applications of Mobile Robots 2 1.2
STRAPDOWN ANALYTICS - SECOND EDITION. Notice - Strapdown Associates. Inc. Copyrighted Material
 STRAPDOWN ANALYTICS - SECOND EDITION Notice - Strapdown Associates. Inc. Copyrighted Material 1 Introduction Inertial navigation is an autonomous process of computing position location by doubly integrating
STRAPDOWN ANALYTICS - SECOND EDITION Notice - Strapdown Associates. Inc. Copyrighted Material 1 Introduction Inertial navigation is an autonomous process of computing position location by doubly integrating
3DM-GX1 Data Communications Protocol
 DCP Manual Version 3.1.02 3DM-GX1 Data Communications Protocol Little Sensors, Big Ideas www.microstrain.com 2010 by MicroStrain, Inc. 459 Hurricane Lane Suite 102 Williston, VT 05495 USA Phone: 802-862-6629
DCP Manual Version 3.1.02 3DM-GX1 Data Communications Protocol Little Sensors, Big Ideas www.microstrain.com 2010 by MicroStrain, Inc. 459 Hurricane Lane Suite 102 Williston, VT 05495 USA Phone: 802-862-6629
Exam in DD2426 Robotics and Autonomous Systems
 Exam in DD2426 Robotics and Autonomous Systems Lecturer: Patric Jensfelt KTH, March 16, 2010, 9-12 No aids are allowed on the exam, i.e. no notes, no books, no calculators, etc. You need a minimum of 20
Exam in DD2426 Robotics and Autonomous Systems Lecturer: Patric Jensfelt KTH, March 16, 2010, 9-12 No aids are allowed on the exam, i.e. no notes, no books, no calculators, etc. You need a minimum of 20
Implementing a Pedestrian Tracker Using Inertial Sensors
 Tracking and Sensing in the Wild Tutorial: Implementing a Pedestrian Tracker Using Inertial Sensors Shoe-mounted inertial sensors offer a convenient way to track pedestrians in situations where other localization
Tracking and Sensing in the Wild Tutorial: Implementing a Pedestrian Tracker Using Inertial Sensors Shoe-mounted inertial sensors offer a convenient way to track pedestrians in situations where other localization
MEMS technology quality requirements as applied to multibeam echosounder. Jerzy DEMKOWICZ, Krzysztof BIKONIS
 MEMS technology quality requirements as applied to multibeam echosounder Jerzy DEMKOWICZ, Krzysztof BIKONIS Gdansk University of Technology Gdansk, Narutowicza str. 11/12, Poland demjot@eti.pg.gda.pl Small,
MEMS technology quality requirements as applied to multibeam echosounder Jerzy DEMKOWICZ, Krzysztof BIKONIS Gdansk University of Technology Gdansk, Narutowicza str. 11/12, Poland demjot@eti.pg.gda.pl Small,
Using the MPU Inertia Measurement Systems Gyroscopes & Accelerometers Sensor fusion I2C MPU-6050
 Using the MPU-6050 Inertia Measurement Systems Gyroscopes & Accelerometers Sensor fusion I2C MPU-6050 IMUs There are small devices indicating changing orientation in smart phones, video game remotes, quad-copters,
Using the MPU-6050 Inertia Measurement Systems Gyroscopes & Accelerometers Sensor fusion I2C MPU-6050 IMUs There are small devices indicating changing orientation in smart phones, video game remotes, quad-copters,
Combined GPS and Inertial Navigation System
 Combined GPS and Inertial Navigation System By Andrew Aubry Advised by Dr. In Soo Ahn Dr. Yufeng Lu January 17, 2016 Electrical and Computer Engineering Department Bradley University 1501 W Bradley Ave
Combined GPS and Inertial Navigation System By Andrew Aubry Advised by Dr. In Soo Ahn Dr. Yufeng Lu January 17, 2016 Electrical and Computer Engineering Department Bradley University 1501 W Bradley Ave
Review Paper: Inertial Measurement
 Review Paper: Inertial Measurement William T. Conlin (wtconlin@gmail.com) arxiv:1708.04325v1 [cs.ro] 8 Aug 2017 May 2017 Abstract Applications of inertial measurement units are extremely diverse, and are
Review Paper: Inertial Measurement William T. Conlin (wtconlin@gmail.com) arxiv:1708.04325v1 [cs.ro] 8 Aug 2017 May 2017 Abstract Applications of inertial measurement units are extremely diverse, and are
LPMS-B Reference Manual
 INTRODUCTION LPMS-B Reference Manual Version 1.1.0 2013 LP-RESEARCH www.lp-research.com 1 INTRODUCTION I. INTRODUCTION Welcome to the LP-RESEARCH Motion Sensor Bluetooth version (LPMS-B) User s Manual!
INTRODUCTION LPMS-B Reference Manual Version 1.1.0 2013 LP-RESEARCH www.lp-research.com 1 INTRODUCTION I. INTRODUCTION Welcome to the LP-RESEARCH Motion Sensor Bluetooth version (LPMS-B) User s Manual!
LPMS-B Reference Manual
 INTRODUCTION LPMS-B Reference Manual Version 1.0.12 2012 LP-RESEARCH 1 INTRODUCTION I. INTRODUCTION Welcome to the LP-RESEARCH Motion Sensor Bluetooth version (LPMS-B) User s Manual! In this manual we
INTRODUCTION LPMS-B Reference Manual Version 1.0.12 2012 LP-RESEARCH 1 INTRODUCTION I. INTRODUCTION Welcome to the LP-RESEARCH Motion Sensor Bluetooth version (LPMS-B) User s Manual! In this manual we
Foot-mounted INS for Everybody An Open-source Embedded Implementation
 Appears in: 2012 IEEE/ION Position Location and Navigation Symposium (PLANS), April 23-26, 2012, Myrtle Beach, SC, pp140-145 Foot-mounted INS for Everybody An Open-source Embedded Implementation John-Olof
Appears in: 2012 IEEE/ION Position Location and Navigation Symposium (PLANS), April 23-26, 2012, Myrtle Beach, SC, pp140-145 Foot-mounted INS for Everybody An Open-source Embedded Implementation John-Olof
Experimental Validation of Foot to Foot Range Measurements in Pedestrian Tracking
 Experimental Validation of Foot to Foot Range Measurements in Pedestrian racking Michel Laverne, Michael George, Dale Lord, Alonzo Kelly, amal Mukherjee, Carnegie Mellon University BIOGRAPHY Michel Laverne
Experimental Validation of Foot to Foot Range Measurements in Pedestrian racking Michel Laverne, Michael George, Dale Lord, Alonzo Kelly, amal Mukherjee, Carnegie Mellon University BIOGRAPHY Michel Laverne
Unscented Kalman Filtering for Attitude Determination Using MEMS Sensors
 Journal of Applied Science and Engineering, Vol. 16, No. 2, pp. 165 176 (2013) DOI: 10.6180/jase.2013.16.2.08 Unscented Kalman Filtering for Attitude Determination Using MEMS Sensors Jaw-Kuen Shiau* and
Journal of Applied Science and Engineering, Vol. 16, No. 2, pp. 165 176 (2013) DOI: 10.6180/jase.2013.16.2.08 Unscented Kalman Filtering for Attitude Determination Using MEMS Sensors Jaw-Kuen Shiau* and
Proceedings of the 2013 SpaceVision Conference November 7-10 th, Tempe, AZ, USA ABSTRACT
 Proceedings of the 2013 SpaceVision Conference November 7-10 th, Tempe, AZ, USA Development of arm controller for robotic satellite servicing demonstrations Kristina Monakhova University at Buffalo, the
Proceedings of the 2013 SpaceVision Conference November 7-10 th, Tempe, AZ, USA Development of arm controller for robotic satellite servicing demonstrations Kristina Monakhova University at Buffalo, the
Increased Error Observability of an Inertial Pedestrian Navigation System by Rotating IMU
 J. Eng. Technol. Sci., Vol. 46, No., 04, -5 Increased Error Observability of an Inertial Pedestrian Navigation System by Rotating IMU Khairi Abdulrahim, Chris Hide, Terry Moore & Chris Hill Facultyof Science
J. Eng. Technol. Sci., Vol. 46, No., 04, -5 Increased Error Observability of an Inertial Pedestrian Navigation System by Rotating IMU Khairi Abdulrahim, Chris Hide, Terry Moore & Chris Hill Facultyof Science
Simulation of GNSS/IMU Measurements. M. J. Smith, T. Moore, C. J. Hill, C. J. Noakes, C. Hide
 Simulation of GNSS/IMU Measurements M. J. Smith, T. Moore, C. J. Hill, C. J. Noakes, C. Hide Institute of Engineering Surveying and Space Geodesy (IESSG) The University of Nottingham Keywords: Simulation,
Simulation of GNSS/IMU Measurements M. J. Smith, T. Moore, C. J. Hill, C. J. Noakes, C. Hide Institute of Engineering Surveying and Space Geodesy (IESSG) The University of Nottingham Keywords: Simulation,
GPS + Inertial Sensor Fusion
 GPS + Inertial Sensor Fusion Senior Project Proposal Aleksey Lykov, William Tarpley, Anton Volkov Advisors: Dr. In Soo Ahn, Dr. Yufeng Lu Date: November 26, 2013 Project Summary The objective of this project
GPS + Inertial Sensor Fusion Senior Project Proposal Aleksey Lykov, William Tarpley, Anton Volkov Advisors: Dr. In Soo Ahn, Dr. Yufeng Lu Date: November 26, 2013 Project Summary The objective of this project
Low-Cost IMU Implementation via Sensor Fusion Algorithms in the. Arduino Environment
 Low-Cost IMU Implementation via Sensor Fusion Algorithms in the Arduino Environment A Senior Project Presented to the Faculty of the Aerospace Engineering Department California Polytechnic State University,
Low-Cost IMU Implementation via Sensor Fusion Algorithms in the Arduino Environment A Senior Project Presented to the Faculty of the Aerospace Engineering Department California Polytechnic State University,
Me 3-Axis Accelerometer and Gyro Sensor
 Me 3-Axis Accelerometer and Gyro Sensor SKU: 11012 Weight: 20.00 Gram Description: Me 3-Axis Accelerometer and Gyro Sensor is a motion processing module. It can use to measure the angular rate and the
Me 3-Axis Accelerometer and Gyro Sensor SKU: 11012 Weight: 20.00 Gram Description: Me 3-Axis Accelerometer and Gyro Sensor is a motion processing module. It can use to measure the angular rate and the
Embedded Navigation Solutions. VN-100 User Manual. Firmware v Document Revision UM001 Introduction 1
 Embedded Navigation Solutions VN-100 User Manual Firmware v2.1.0.0 Document Revision 2.41 UM001 Introduction 1 Document Information Title VN-100 User Manual Subtitle Inertial Navigation Modules Document
Embedded Navigation Solutions VN-100 User Manual Firmware v2.1.0.0 Document Revision 2.41 UM001 Introduction 1 Document Information Title VN-100 User Manual Subtitle Inertial Navigation Modules Document
This design tip applies to all accelerometers, ecompass modules, and inemo inertial IMUs from STMicroelectronics.
 DT0106 Design tip Residual linear acceleration by gravity subtraction to enable dead-reckoning By Andrea Vitali Purpose and benefits This design tip explains how to compute the residual linear acceleration,
DT0106 Design tip Residual linear acceleration by gravity subtraction to enable dead-reckoning By Andrea Vitali Purpose and benefits This design tip explains how to compute the residual linear acceleration,
Accelerometer user manual
 Accelerometer user manual V1.3 COPY RIGHTS ECOTRONS LLC ALL RIGHTS RESERVED Note: If you are not sure about any specific details, please contact us at info@ecotrons.com. Index Page Revision Date Note 1
Accelerometer user manual V1.3 COPY RIGHTS ECOTRONS LLC ALL RIGHTS RESERVED Note: If you are not sure about any specific details, please contact us at info@ecotrons.com. Index Page Revision Date Note 1
MEAM 620: HW 1. Sachin Chitta Assigned: January 10, 2007 Due: January 22, January 10, 2007
 MEAM 620: HW 1 Sachin Chitta (sachinc@grasp.upenn.edu) Assigned: January 10, 2007 Due: January 22, 2006 January 10, 2007 1: MATLAB Programming assignment Using MATLAB, write the following functions: 1.
MEAM 620: HW 1 Sachin Chitta (sachinc@grasp.upenn.edu) Assigned: January 10, 2007 Due: January 22, 2006 January 10, 2007 1: MATLAB Programming assignment Using MATLAB, write the following functions: 1.
An IMU-based Wearable Presentation Pointing Device
 An IMU-based Wearable Presentation Pointing evice imitrios Sikeridis and Theodore A. Antonakopoulos epartment of Electrical and Computer Engineering University of Patras Patras 654, Greece Email: d.sikeridis@upnet.gr,
An IMU-based Wearable Presentation Pointing evice imitrios Sikeridis and Theodore A. Antonakopoulos epartment of Electrical and Computer Engineering University of Patras Patras 654, Greece Email: d.sikeridis@upnet.gr,
Test Report iµvru. (excerpt) Commercial-in-Confidence. imar Navigation GmbH Im Reihersbruch 3 D St. Ingbert Germany.
 Commercial-in-Confidence. imar Navigation GmbH Im Reihersbruch 3 D St. Ingbert Germany.") 1 of 11 (excerpt) Commercial-in-Confidence imar Navigation GmbH Im Reihersbruch 3 D-66386 St. Ingbert Germany www.imar-navigation.de sales@imar-navigation.de 2 of 11 CHANGE RECORD Date Issue Paragraph
1 of 11 (excerpt) Commercial-in-Confidence imar Navigation GmbH Im Reihersbruch 3 D-66386 St. Ingbert Germany www.imar-navigation.de sales@imar-navigation.de 2 of 11 CHANGE RECORD Date Issue Paragraph
Inertial measurement and realistic post-flight visualization
 Inertial measurement and realistic post-flight visualization David Fifield Metropolitan State College of Denver Keith Norwood, faculty advisor June 28, 2007 Abstract Determining the position and orientation
Inertial measurement and realistic post-flight visualization David Fifield Metropolitan State College of Denver Keith Norwood, faculty advisor June 28, 2007 Abstract Determining the position and orientation
Aided-inertial for Long-term, Self-contained GPS-denied Navigation and Mapping
 Aided-inertial for Long-term, Self-contained GPS-denied Navigation and Mapping Erik Lithopoulos, Louis Lalumiere, Ron Beyeler Applanix Corporation Greg Spurlock, LTC Bruce Williams Defense Threat Reduction
Aided-inertial for Long-term, Self-contained GPS-denied Navigation and Mapping Erik Lithopoulos, Louis Lalumiere, Ron Beyeler Applanix Corporation Greg Spurlock, LTC Bruce Williams Defense Threat Reduction
ON IMPROVED GRAVITY MODELING SUPPORTING DIRECT GEOREFERENCING OF MULTISENSOR SYSTEMS
 ON IMPROVED GRAVITY MODELING SUPPORTING DIRECT GEOREFERENCING OF MULTISENSOR SYSTEMS Dorota A. Grejner-Brzezinska a,*, Yudan Yi a, Charles Toth b, Robert Anderson c, James Davenport c, Damian Kopcha c
ON IMPROVED GRAVITY MODELING SUPPORTING DIRECT GEOREFERENCING OF MULTISENSOR SYSTEMS Dorota A. Grejner-Brzezinska a,*, Yudan Yi a, Charles Toth b, Robert Anderson c, James Davenport c, Damian Kopcha c
NAVAL POSTGRADUATE SCHOOL THESIS
 NAVAL POSTGRADUATE SCHOOL MONTEREY, CALIFORNIA THESIS IMPLEMENTATION AND EVALUATION OF AN INS SYSTEM USING A THREE DEGREES OF FREEDOM MEMS ACCELEROMETER by Ender Emir December 2008 Thesis Advisor: Second
NAVAL POSTGRADUATE SCHOOL MONTEREY, CALIFORNIA THESIS IMPLEMENTATION AND EVALUATION OF AN INS SYSTEM USING A THREE DEGREES OF FREEDOM MEMS ACCELEROMETER by Ender Emir December 2008 Thesis Advisor: Second
INERTIAL NAVIGATION SYSTEM DEVELOPED FOR MEMS APPLICATIONS
 INERTIAL NAVIGATION SYSTEM DEVELOPED FOR MEMS APPLICATIONS P. Lavoie 1, D. Li 2 and R. Jr. Landry 3 NRG (Navigation Research Group) of LACIME Laboratory École de Technologie Supérieure 1100, Notre Dame
INERTIAL NAVIGATION SYSTEM DEVELOPED FOR MEMS APPLICATIONS P. Lavoie 1, D. Li 2 and R. Jr. Landry 3 NRG (Navigation Research Group) of LACIME Laboratory École de Technologie Supérieure 1100, Notre Dame
Accelerometer and Magnetometer Based Gyroscope Emulation on Smart Sensor for a Virtual Reality Application
 Accelerometer and Magnetometer Based Gyroscope Emulation on Smart Sensor for a Virtual Reality Application Baptiste Delporte, Laurent Perroton, Thierry Grandpierre, Jacques Trichet To cite this version:
Accelerometer and Magnetometer Based Gyroscope Emulation on Smart Sensor for a Virtual Reality Application Baptiste Delporte, Laurent Perroton, Thierry Grandpierre, Jacques Trichet To cite this version:
Responsive Flight Software Development & Verification Techniques for Small Satellites
 Responsive Flight Software Development & Verification Techniques for Small Satellites Darren Rowen The Aerospace Corporation Vehicle Systems Division 9 November 2012 The Aerospace Corporation 2012 Overview
Responsive Flight Software Development & Verification Techniques for Small Satellites Darren Rowen The Aerospace Corporation Vehicle Systems Division 9 November 2012 The Aerospace Corporation 2012 Overview
R&D Centre: GT Silicon Pvt Ltd 171, MIG, Awadhpuri, Block B, Lakhanpur, Kanpur (UP), India, PIN
, India, PIN") MIMUscope Instruction Manual Revision 1.1 R&D Centre: GT Silicon Pvt Ltd 171, MIG, Awadhpuri, Block B, Lakhanpur, Kanpur (UP), India, PIN 208024 Tel: +91 512 258 0039 Fax: +91 512 259 6177 Email: hello@oblu.io
MIMUscope Instruction Manual Revision 1.1 R&D Centre: GT Silicon Pvt Ltd 171, MIG, Awadhpuri, Block B, Lakhanpur, Kanpur (UP), India, PIN 208024 Tel: +91 512 258 0039 Fax: +91 512 259 6177 Email: hello@oblu.io
EE565:Mobile Robotics Lecture 2
 EE565:Mobile Robotics Lecture 2 Welcome Dr. Ing. Ahmad Kamal Nasir Organization Lab Course Lab grading policy (40%) Attendance = 10 % In-Lab tasks = 30 % Lab assignment + viva = 60 % Make a group Either
EE565:Mobile Robotics Lecture 2 Welcome Dr. Ing. Ahmad Kamal Nasir Organization Lab Course Lab grading policy (40%) Attendance = 10 % In-Lab tasks = 30 % Lab assignment + viva = 60 % Make a group Either
A High Precision Reference Data Set for Pedestrian Navigation using Foot-Mounted Inertial Sensors
 200 International Conference on Indoor Positioning and Indoor Navigation (IPIN), 5-7 September 200, Zürich, Switzerland A High Precision Reference Data Set for Pedestrian Navigation using Foot-Mounted
200 International Conference on Indoor Positioning and Indoor Navigation (IPIN), 5-7 September 200, Zürich, Switzerland A High Precision Reference Data Set for Pedestrian Navigation using Foot-Mounted
Research Article An Intuitive Approach to Inertial Sensor Bias Estimation
 Navigation and Observation Volume 2013, Article ID 762758, 6 pages http://dx.doi.org/10.1155/2013/762758 Research Article An Intuitive Approach to Inertial Sensor Bias Estimation Vasiliy M. Tereshkov Topcon
Navigation and Observation Volume 2013, Article ID 762758, 6 pages http://dx.doi.org/10.1155/2013/762758 Research Article An Intuitive Approach to Inertial Sensor Bias Estimation Vasiliy M. Tereshkov Topcon