Inertial Measurement Units I!
|
|
|
- Prosper McCoy
- 6 years ago
- Views:
Transcription



1 ! Inertial Measurement Units I! Gordon Wetzstein! Stanford University! EE 267 Virtual Reality! Lecture 9! stanford.edu/class/ee267/!!
2 Lecture Overview! coordinate systems (world, body/sensor, inertial, transforms)! overview of inertial sensors: gyroscopes, accelerometers, and magnetometers! gyro integration aka dead reckoning! orientation tracking in flatland! pitch & roll from accelerometer! overview of VRduino!
3 primary goal: track orientation of head or other device! orientation is the rotation of device w.r.t. world/earth or inertial frame! rotations are represented by Euler angles (yaw, pitch, roll) or quaternions! oculus.com!
4 !! orientation tracked with IMU models relative rotation of sensor/body frame in world/ inertial coordinates! example: person on the left looks up à pitch=90 or rotation around x-axis by 90! similarly, the world rotates around the sensor frame by -90 (inverse rotation)! oculus.com!
5 from lecture 2:! vertex in clip space! vertex! v clip = M proj M view M model v oculus.com!
6 from lecture 2:! vertex in clip space! vertex! v clip = M proj M view M model v projection matrix! view matrix! model matrix! oculus.com!
7 from lecture 2:! vertex in clip space! vertex! v clip = M proj M view M model v projection matrix! view matrix! model matrix! rotation! translation! M view = R T ( eye) oculus.com!
8 from lecture 2:! vertex in clip space! vertex! v clip = M proj M view M model v projection matrix! view matrix! model matrix! rotation! translation! M view = R T ( eye) oculus.com! view matrix for stereo camera:! M stereo view = T ± ipd 2,0,0 R T eye ( )
9 from lecture 2:! vertex in clip space! vertex! v clip = M proj M view M model v projection matrix! view matrix! model matrix! rotation! translation! M view = R T ( eye) oculus.com! sensor/body frame! world/inertial frame!
10 θ y oculus.com! θ z θ x R = R z rotation! translation! M view = R T ( eye) roll! pitch! yaw! ( θ z ) R x ( θ x ) R y θ y ( ) order of rotations (world to body)!
11 ! θ y this representation for a rotation is know as Euler angles! need to specify order of rotation, e.g. yaw-pitch-roll! oculus.com! θ z θ x R = R z roll! pitch! yaw! ( θ z ) R x ( θ x ) R y θ y ( ) order of rotations (world to body)!
12 ATTENTION!! θ y Euler angles are usually a terrible idea for orientation tracking with more than 1 axis! one of several reasons: rotations are not commutative! oculus.com! θ z θ x R = R z roll! pitch! yaw! ( θ z ) R x ( θ x ) R y θ y ( ) order of rotations (world to body)!
13 What do Inertial Sensors Measure?! gyroscope measures angular velocity in degrees/sec! accelerometer measures linear acceleration in m/s 2! magnetometer measures magnetic field strength in ut (micro Tesla) or Gauss à 1 Gauss = 100 ut! ω! a! m!
14 What do Inertial Sensors Measure?! gyroscope measures angular velocity in degrees/sec! accelerometer measures linear acceleration in m/s 2! magnetometer measures magnetic field strength in ut (micro Tesla) or Gauss à 1 Gauss = 100 ut! ω! a! m!


15 History of Gyroscopes! critical for inertial measurements in ballistic missiles, aircrafts, drones, the mars rover, pretty much anything that moves! WWII era gyroscope used in the V2 rocket!

!")
16 MEMS Gyroscopes! today, we use microelectromechanical systems (MEMS)! Coriolis Force! wikipedia! quora.com!

17
18 Gyroscopes! gyro model:! ω! = ω + b + η
19 gyro model:! Gyroscopes! ω! = ω + b + η η ~ N ( 2 0,σ ) gyro true angular velocity! additive, zero-mean Gaussian noise! bias!
20 ! gyro model:! Gyroscopes! ω! = ω + b + η true angular velocity! bias! 3 DOF = 3-axis gyros that measures 3 orthogonal axes, assume no crosstalk! bias is temperature-dependent and may change over time; can approximate as a constant! additive measurement noise! η ~ N ( 2 0,σ ) gyro additive, zero-mean Gaussian noise!
21 Gyroscopes! from gyro measurements to orientation use Taylor expansion! θ ( t + Δt) θ ( t) +! t θ ( t )Δt + ε, ε O( Δt 2 )
22 ! Gyroscopes! from gyro measurements to orientation use Taylor expansion! have: angle at! last time step! have:! time step! ( ) θ ( t) + t θ t θ t + Δt want: angle at! current time step! = ω have: gyro measurement! (angular velocity)! ( ) ( )Δt + ε, ε O Δt 2 approximation error!!
23 Gyro Integration: linear motion, no noise, no bias!

24 Gyro Integration: linear motion, noise, no bias!

25 Gyro Integration: linear motion, no noise, bias!

26 Gyro Integration: nonlinear motion, no noise, no bias!
27 Gyro Integration: nonlinear motion, noise, bias!
28 Gyro Integration aka Dead Reckoning! works well for linear motion, no noise, no bias = unrealistic! even if bias is know and noise is zero à drift (from integration)! bias & noise variance can be estimated, other sensor measurements used to correct for drift (sensor fusion)! accurate in short term, but not reliable in long term due to drift!

29 Dead Reckoning for Ship Navigation! can measure north with compass, ship s speed, and time! initial position known! map from game pirates!!
30 Dead Reckoning for Ship Navigation! can measure north with compass, ship s speed, and time! initial position known! problem: drift! (similar to that observed in gyro integration)! map from game pirates!!
31 Gyro Advice! Always be aware of what units you are working with, degrees per second v radians per second!!
32 measure linear acceleration! Accelerometers! ( )!a = a ( g) + a ( l) 2 + η, η ~ N 0,σ acc without motion: read noisy gravity vector pointing UP! with magnitude 9.81 m/s2 = 1g! a g ( ) + η with motion: combined gravity vector and external forces! a ( l)
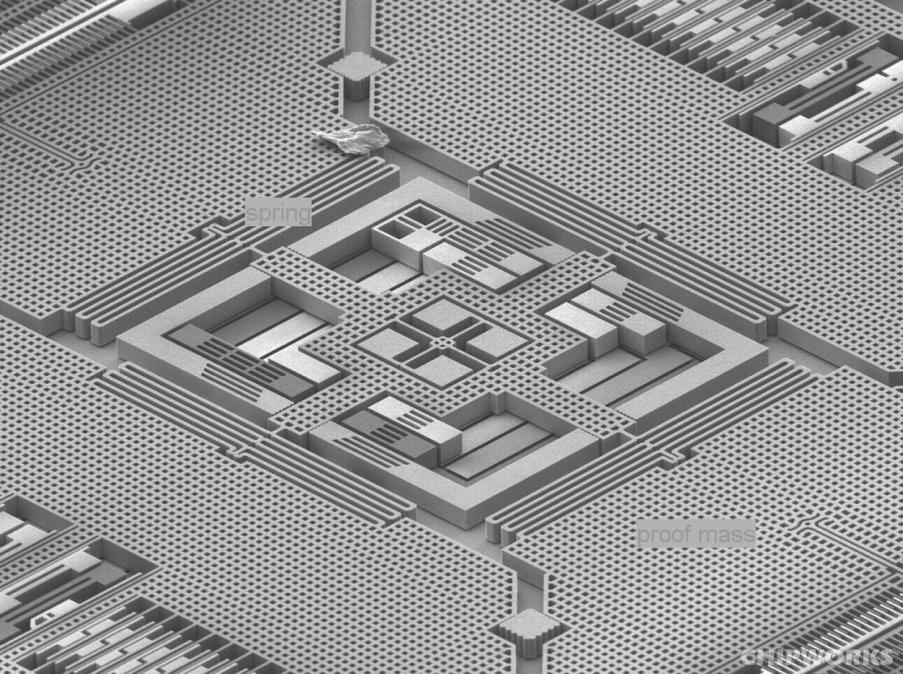
33 chipworks!
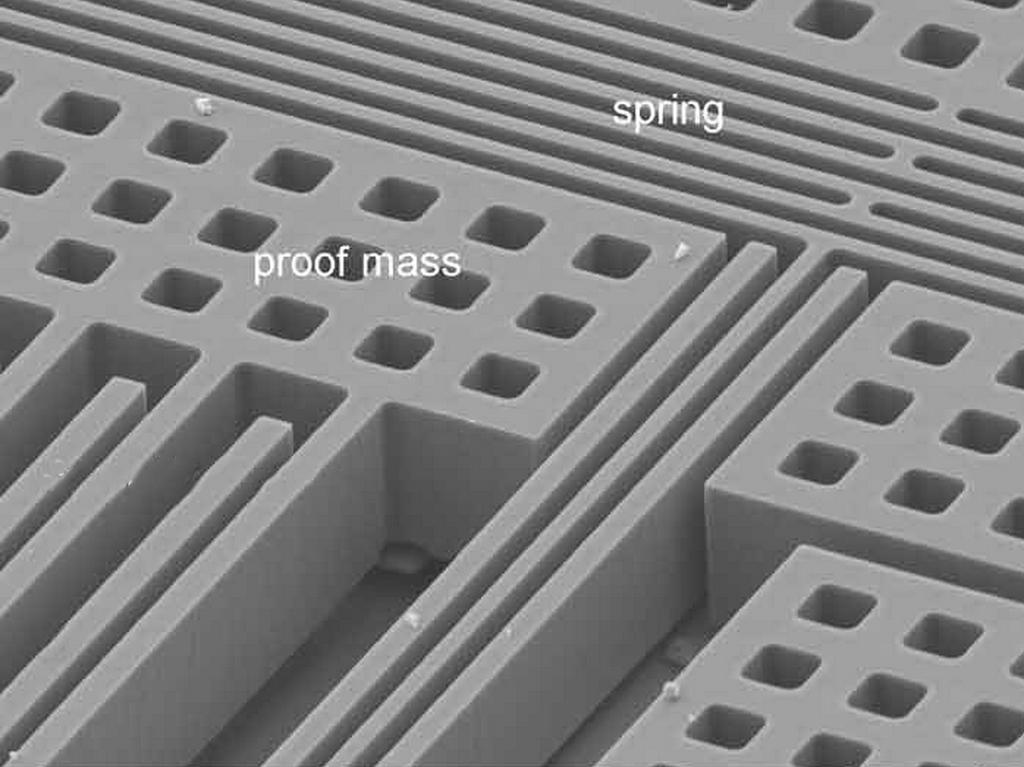
34 capacitive! plates!

35
36 ! advantages:! problem:! Accelerometers! points up on average with magnitude of 1g! accurate in long term because no drift and the earth s center of gravity (usually) doesn t move! noisy measurements! unreliable in short run due to motion (and noise)! complementary to gyro measurements!!
37 Accelerometers! fusing gyro and accelerometer data = 6 DOF sensor fusion! can correct tilt (i.e., pitch & roll) only no information about yaw!
38 Orientation Tracking in Flatland! problem: track angle θ in 2D space! sensors: 1 gyro, 2-axis accelerometer! VRduino IMU goal: understand 6-DOF sensor fusion!
39 Orientation Tracking in Flatland! gyro integration via Taylor series as! ( t) θ gyro ( t 1 = θ ) gyro +!ω Δt VRduino IMU get Δt from microcontroller! set! ( 0) θ gyro = 0 biggest problem: drift!!
40 Orientation Tracking in Flatland! angle from accelerometer! y ( world) θ acc = tan 1!a x!a y = atan2!a x,!a y ( )!a IMU VRduino y ( body) x ( world) x ( body)
 x ( world) handles division by 0 and proper signs, provided by most programming languages!")
41 Orientation Tracking in Flatland! angle from accelerometer! y ( world) θ acc = tan 1!a x!a y = atan2!a x,!a y ( )!a IMU VRduino y ( body) x ( world) handles division by 0 and proper signs, provided by most programming languages! x ( body)
42 Orientation Tracking in Flatland! angle from accelerometer! y ( world) θ acc = tan 1!a x!a y = atan2!a x,!a y ( )!a VRduino IMU y ( body) x ( world) x ( body) biggest problem: noise!
43 Orientation Tracking in Flatland! sensor fusion: combine gyro and accelerometer measurements! intuition:! remove drift from gyro via high-pass filter! remove noise from accelerometer via low-pass filter! IMU VRduino
44 Orientation Tracking in Flatland! sensor fusion with complementary filter, i.e. linear interpolation! θ t ( ) + 1 α ( ) = α θ ( t 1) +!ω Δt ( )atan2!a x,!a y ( ) IMU VRduino no drift, no noise!
45 Orientation Tracking in Flatland!
46 ! Pitch and Roll from 3-axis Accelerometer! problem: estimate pitch and roll angles in 3D, from 3-axis accelerometer! together, pitch & roll angles are known as tilt! goal: understand tilt estimation in 3D!
47 Pitch and Roll from 3-axis Accelerometer! use only accelerometer data can estimate pitch & roll, not yaw! assume no external forces (only gravity) acc is pointing UP! normalize gravity vector in inertial coordinates! â =!a 0!a = R 1 0 = R z ( ) ( θ z ) R x ( θ x ) R y θ y normalize gravity vector rotated into sensor coordinates!
48 Pitch and Roll from 3-axis Accelerometer! use only accelerometer data can estimate pitch & roll, not yaw! assume no external forces (only gravity) acc is pointing UP! â =!a 0!a = R 1 0 = ( ) sin( θ z ) 0 ( ) cos( θ z ) 0 cos θ z sin θ z = R z cos θ x 0 sin θ x ( ) ( θ z ) R x ( θ x ) R y θ y ( ) sin( θ x ) ( ) cos( θ x ) cos( θ y ) 0 sin( θ y ) ( ) 0 cos( θ y ) sin θ y 0 1 0
49 Pitch and Roll from 3-axis Accelerometer! use only accelerometer data can estimate pitch & roll, not yaw! assume no external forces (only gravity) acc is pointing UP! â =!a!a = ( ) ( ) ( ) cos( θ x )sin θ z cos( θ x )cos θ z sin θ x
 acc is pointing UP! â =!a!a = ( ) ( ) ( ) cos( θ x )sin θ z cos( θ x )cos θ z sin θ x â x roll!")
50 Pitch and Roll from 3-axis Accelerometer! use only accelerometer data can estimate pitch & roll, not yaw! assume no external forces (only gravity) acc is pointing UP! â =!a!a = ( ) ( ) ( ) cos( θ x )sin θ z cos( θ x )cos θ z sin θ x â x roll! = sin θ z â y cos θ z ( ) ( ) = tan ( θ z ) θ z = atan2( â x,â y ) in rad [ π,π ]
51 Pitch and Roll from 3-axis Accelerometer! use only accelerometer data can estimate pitch & roll, not yaw! assume no external forces (only gravity) acc is pointing UP! â =!a!a = ( ) ( ) ( ) cos( θ x )sin θ z cos( θ x )cos θ z sin θ x â z pitch! â 2 x + â = sin θ x 2 y cos 2 ( θ x ) sin 2 θ z = sin θ x cos θ x ( ) ( ) + cos 2 ( θ z ) ( ) ( ) ( ) = tan ( θ x ) = 1
52 Pitch and Roll from 3-axis Accelerometer! use only accelerometer data can estimate pitch & roll, not yaw! assume no external forces (only gravity) acc is pointing UP! â =!a!a = ( ) ( ) ( ) cos( θ x )sin θ z cos( θ x )cos θ z sin θ x â z pitch! â 2 x + â = sin θ x 2 y cos 2 ( θ x ) sin 2 θ z θ x = atan2 â z, â x 2 + â y 2 ( ) ( ) + cos 2 ( θ z ) ( ) = 1 ( ) in rad π 2, π 2
53 Pitch and Roll from 3-axis Accelerometer! use only accelerometer data can estimate pitch & roll, not yaw! assume no external forces (only gravity) acc is pointing UP! â z pitch! â 2 x + â = sin θ x 2 y cos 2 ( θ x ) sin 2 θ z ( ) ( ) + cos 2 ( θ z ) ( ) = 1 θ x = atan2( â z,sign( â y ) â 2 2 x + â ) y in rad [ π,π ]

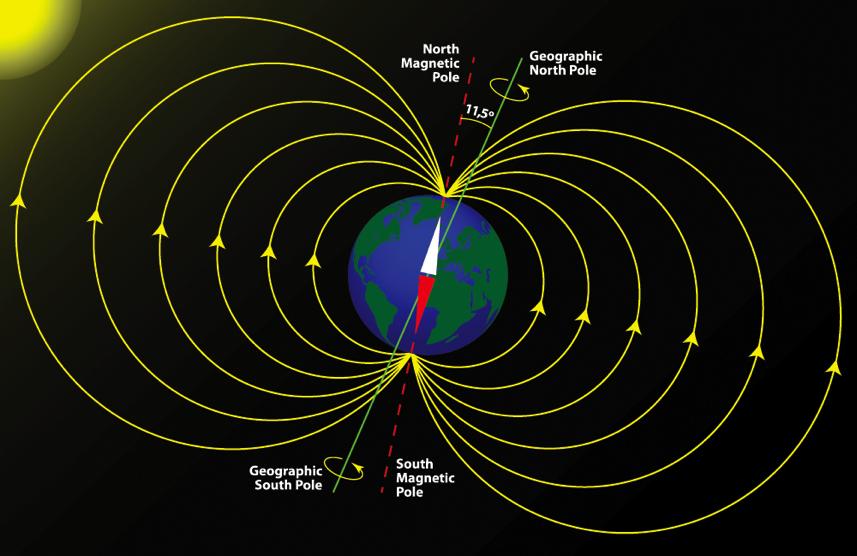
54 Magnetometers! lifescience.com! wikipedia!
55
56 Magnetometers! measure earth s magnetic field in Gauss or ut! 3 orthogonal axes = vector pointing along the magnetic field! actual direction depends on latitude and longitude!! distortions due to metal / electronics objects in the room or in HMD!
57 Magnetometers! difficult to work with magnetometers without proper calibration à we will not use the magnetometer in the HW! LaValle et al.!
!")
58 ! Magnetometers! advantages:! complementary to accelerometer gives yaw (heading)! problems:! affected by metal, distortions of magnetic field! need to know location, even when calibrated (e.g. GPS)! together with gyro + accelerometer = 9 DOF sensor fusion!
59 Prototype IMU! 9 DOF IMU: InvenSense MPU-9250 = updated model of what was in the Oculus DK2! 3-axis gyro, 3-axis accelerometer, 3-axis magnetometer all on 1 chip (we ll only use gyro and acc, but we ll give you code to read mag if you want to use it in your project)! interface with I2C (serial bus) from Arduino!



60 Prototype IMU! to host:! serial via USB! I2C! e.g. Arduino! InvenSense MPU-9250!
61 MPU-9250 Specs! multi-chip module: 1 die houses gyro & accelerometer, the other the magnetometer! magnetometer: Asahi Kasei Microdevices AK8963 ( 3 rd party device )! 9x 16 bit ADCs for digitizing 9DOF data!
62 MPU-9250 Specs! gyro modes: ±250, ±500, ±1000, ±2000 /sec! accelerometer: ±2, ±4, ±8, ±16 g! magnetometer: ±4800 ut! configure using registers (see specs) via I2C! also supports on-board Digital Motion Processing (DMP ) sorry, we don t have access! we ll provide starter code for Arduino in lab (easy to use for beginners, not consumer product grade!)!
63 MPU-9250 Specs! gyro modes: ±250, ±500, ±1000, ±2000 /sec! accelerometer: ±2, ±4, ±8, ±16 g! magnetometer: ±4800 ut! metric _ value = raw _ sensor _ value max_ range


64 MPU-9250 Coordinate Systems! gyro & accelerometer! magnetometer!
65 How to read data from IMU! I2C = serial interface with 2 cables (also see next lab)! microcontroller to read, we ll use Teensy 3.2, but any Arduino can be used, last year: Metro Mini! schematics - which pins to connect where! quick intro to Arduino! Wire library to stream out data via serial! serial client using node server!
66 How to read data from IMU!
67 How to read data from IMU! 3.3V! connect power & ground! GND!
68 How to read data from IMU! 3.3V! connect power & ground! connect I2C clock (SCL,D19) and data (SDA,D18) lines! GND!

 lines!")
69 How to read data from IMU! 3.3V! connect power & ground! connect I2C clock (SCL,A5) and data (SDA,A4) lines! connect micro USB for power and data transfer! GND!
!")
70 VRduino! Teensy 3.2 & IMU already connected through PCB! also has 4 photodiodes (more details next week)! GPIO pins for additional sensors or other add-ons!
71 Introduction to Arduino! open source microcontroller hardware & software! directly interface with sensors (i.e. IMU) and process raw data! we will be working with Teensy 3.2 (Arduino compatible)! use Arduino IDE for all software development, installed on all lab machines! if you want to install it on your laptop, make sure to get:! IDE: Teensyduino: Wire library (for serial & I2C): FTDI drivers:

72 Introduction to Arduino (Random Test Program)! variable definition! setup function = initialization! loop function = runtime callback! connected to COM1 serial port!
73 Introduction to Arduino! need to stream data from Arduino to host PC! use Wire library for all serial & I2C communication! use node server to read from host PC and connect to JavaScript (see lab)!

74 Introduction to Arduino! read from I2C (connected to IMU)! write to I2C (connected to IMU)! setup function = one time initialization! open serial connection to communicate with host PC! set registers to configure IMU!
75 Read Serial Data in Windows! serial ports called COMx (USB serial usually COM3-COM7)! 1. establish connection to correct COM port (choose appropriate baud rate)! 2. read incoming data (in a thread)!
76 Summary! coordinate systems (world, body/sensor, inertial, transforms)! overview of inertial sensors: gyroscopes, accelerometers, and magnetometers! gyro integration aka dead reckoning! orientation tracking in flatland! pitch & roll from accelerometer! overview of VRduino!
77 Next Lecture! quaternions and rotations with quaternions! 6 DOF sensor fusion with quaternions & complementary filtering!
78 Must read: course notes on IMUs!!
79 Additional Information! D. Sachs Sensor Fusion on Android Devices: A Revolution in Motion Processing, Google Tech Talks 2010, Video on youtube.com ( S. LaValle, A. Yershova, M. Katsev, M. Antonov Head Tracking for the Oculus Rift, Proc. ICRA 2014!
Inertial Measurement Units II!
 ! Inertial Measurement Units II! Gordon Wetzstein! Stanford University! EE 267 Virtual Reality! Lecture 10! stanford.edu/class/ee267/!! wikipedia! Polynesian Migration! Lecture Overview! short review of
! Inertial Measurement Units II! Gordon Wetzstein! Stanford University! EE 267 Virtual Reality! Lecture 10! stanford.edu/class/ee267/!! wikipedia! Polynesian Migration! Lecture Overview! short review of
EE 267 Virtual Reality Course Notes: 3-DOF Orientation Tracking with IMUs
 EE 67 Virtual Reality Course Notes: 3-DOF Orientation Tracking with IMUs Gordon Wetzstein gordon.wetzstein@stanford.edu Updated on: September 5, 017 This document serves as a supplement to the material
EE 67 Virtual Reality Course Notes: 3-DOF Orientation Tracking with IMUs Gordon Wetzstein gordon.wetzstein@stanford.edu Updated on: September 5, 017 This document serves as a supplement to the material
Me 3-Axis Accelerometer and Gyro Sensor
 Me 3-Axis Accelerometer and Gyro Sensor SKU: 11012 Weight: 20.00 Gram Description: Me 3-Axis Accelerometer and Gyro Sensor is a motion processing module. It can use to measure the angular rate and the
Me 3-Axis Accelerometer and Gyro Sensor SKU: 11012 Weight: 20.00 Gram Description: Me 3-Axis Accelerometer and Gyro Sensor is a motion processing module. It can use to measure the angular rate and the
Selection and Integration of Sensors Alex Spitzer 11/23/14
 Selection and Integration of Sensors Alex Spitzer aes368@cornell.edu 11/23/14 Sensors Perception of the outside world Cameras, DVL, Sonar, Pressure Accelerometers, Gyroscopes, Magnetometers Position vs
Selection and Integration of Sensors Alex Spitzer aes368@cornell.edu 11/23/14 Sensors Perception of the outside world Cameras, DVL, Sonar, Pressure Accelerometers, Gyroscopes, Magnetometers Position vs
Camera and Inertial Sensor Fusion
 January 6, 2018 For First Robotics 2018 Camera and Inertial Sensor Fusion David Zhang david.chao.zhang@gmail.com Version 4.1 1 My Background Ph.D. of Physics - Penn State Univ. Research scientist at SRI
January 6, 2018 For First Robotics 2018 Camera and Inertial Sensor Fusion David Zhang david.chao.zhang@gmail.com Version 4.1 1 My Background Ph.D. of Physics - Penn State Univ. Research scientist at SRI
An Intro to Gyros. FTC Team #6832. Science and Engineering Magnet - Dallas ISD
 An Intro to Gyros FTC Team #6832 Science and Engineering Magnet - Dallas ISD Gyro Types - Mechanical Hubble Gyro Unit Gyro Types - Sensors Low cost MEMS Gyros High End Gyros Ring laser, fiber optic, hemispherical
An Intro to Gyros FTC Team #6832 Science and Engineering Magnet - Dallas ISD Gyro Types - Mechanical Hubble Gyro Unit Gyro Types - Sensors Low cost MEMS Gyros High End Gyros Ring laser, fiber optic, hemispherical
navigation Isaac Skog
 Foot-mounted zerovelocity aided inertial navigation Isaac Skog skog@kth.se Course Outline 1. Foot-mounted inertial navigation a. Basic idea b. Pros and cons 2. Inertial navigation a. The inertial sensors
Foot-mounted zerovelocity aided inertial navigation Isaac Skog skog@kth.se Course Outline 1. Foot-mounted inertial navigation a. Basic idea b. Pros and cons 2. Inertial navigation a. The inertial sensors
E80. Experimental Engineering. Lecture 9 Inertial Measurement
 Lecture 9 Inertial Measurement http://www.volker-doormann.org/physics.htm Feb. 19, 2013 Christopher M. Clark Where is the rocket? Outline Sensors People Accelerometers Gyroscopes Representations State
Lecture 9 Inertial Measurement http://www.volker-doormann.org/physics.htm Feb. 19, 2013 Christopher M. Clark Where is the rocket? Outline Sensors People Accelerometers Gyroscopes Representations State
Satellite Attitude Determination
 Satellite Attitude Determination AERO4701 Space Engineering 3 Week 5 Last Week Looked at GPS signals and pseudorange error terms Looked at GPS positioning from pseudorange data Looked at GPS error sources,
Satellite Attitude Determination AERO4701 Space Engineering 3 Week 5 Last Week Looked at GPS signals and pseudorange error terms Looked at GPS positioning from pseudorange data Looked at GPS error sources,
USB Virtual Reality HID. by Weston Taylor and Chris Budzynski Advisor: Dr. Malinowski
 USB Virtual Reality HID by Weston Taylor and Chris Budzynski Advisor: Dr. Malinowski Project Summary Analysis Block Diagram Hardware Inertial Sensors Position Calculation USB Results Questions === Agenda
USB Virtual Reality HID by Weston Taylor and Chris Budzynski Advisor: Dr. Malinowski Project Summary Analysis Block Diagram Hardware Inertial Sensors Position Calculation USB Results Questions === Agenda
LPMS-B Reference Manual
 INTRODUCTION LPMS-B Reference Manual Version 1.0.12 2012 LP-RESEARCH 1 INTRODUCTION I. INTRODUCTION Welcome to the LP-RESEARCH Motion Sensor Bluetooth version (LPMS-B) User s Manual! In this manual we
INTRODUCTION LPMS-B Reference Manual Version 1.0.12 2012 LP-RESEARCH 1 INTRODUCTION I. INTRODUCTION Welcome to the LP-RESEARCH Motion Sensor Bluetooth version (LPMS-B) User s Manual! In this manual we
XDK HARDWARE OVERVIEW
 XDK HARDWARE OVERVIEW Agenda 1 General Overview 2 3 4 Sensors Communications Extension Board 2 General Overview 1. General Overview What is the XDK? The Cross-Domain Development Kit, or XDK, is a battery
XDK HARDWARE OVERVIEW Agenda 1 General Overview 2 3 4 Sensors Communications Extension Board 2 General Overview 1. General Overview What is the XDK? The Cross-Domain Development Kit, or XDK, is a battery
Camera Drones Lecture 2 Control and Sensors
 Camera Drones Lecture 2 Control and Sensors Ass.Prof. Friedrich Fraundorfer WS 2017 1 Outline Quadrotor control principles Sensors 2 Quadrotor control - Hovering Hovering means quadrotor needs to hold
Camera Drones Lecture 2 Control and Sensors Ass.Prof. Friedrich Fraundorfer WS 2017 1 Outline Quadrotor control principles Sensors 2 Quadrotor control - Hovering Hovering means quadrotor needs to hold
Using the MPU Inertia Measurement Systems Gyroscopes & Accelerometers Sensor fusion I2C MPU-6050
 Using the MPU-6050 Inertia Measurement Systems Gyroscopes & Accelerometers Sensor fusion I2C MPU-6050 IMUs There are small devices indicating changing orientation in smart phones, video game remotes, quad-copters,
Using the MPU-6050 Inertia Measurement Systems Gyroscopes & Accelerometers Sensor fusion I2C MPU-6050 IMUs There are small devices indicating changing orientation in smart phones, video game remotes, quad-copters,
Parallax LSM9DS1 9-axis IMU Module (#28065)
") Web Site: www.parallax.com Forums: forums.parallax.com Sales: sales@parallax.com Technical:support@parallax.com Office: (916) 624-8333 Fax: (916) 624-8003 Sales: (888) 512-1024 Tech Support: (888) 997-8267
Web Site: www.parallax.com Forums: forums.parallax.com Sales: sales@parallax.com Technical:support@parallax.com Office: (916) 624-8333 Fax: (916) 624-8003 Sales: (888) 512-1024 Tech Support: (888) 997-8267
TEST RESULTS OF A GPS/INERTIAL NAVIGATION SYSTEM USING A LOW COST MEMS IMU
 TEST RESULTS OF A GPS/INERTIAL NAVIGATION SYSTEM USING A LOW COST MEMS IMU Alison K. Brown, Ph.D.* NAVSYS Corporation, 1496 Woodcarver Road, Colorado Springs, CO 891 USA, e-mail: abrown@navsys.com Abstract
TEST RESULTS OF A GPS/INERTIAL NAVIGATION SYSTEM USING A LOW COST MEMS IMU Alison K. Brown, Ph.D.* NAVSYS Corporation, 1496 Woodcarver Road, Colorado Springs, CO 891 USA, e-mail: abrown@navsys.com Abstract
ECV ecompass Series. Technical Brief. Rev A. Page 1 of 8. Making Sense out of Motion
 Technical Brief The ECV ecompass Series provides stable azimuth, pitch, and roll measurements in dynamic conditions. An enhanced version of our ECG Series, the ECV includes a full suite of precision, 3-axis,
Technical Brief The ECV ecompass Series provides stable azimuth, pitch, and roll measurements in dynamic conditions. An enhanced version of our ECG Series, the ECV includes a full suite of precision, 3-axis,
LPMS-B Reference Manual
 INTRODUCTION LPMS-B Reference Manual Version 1.1.0 2013 LP-RESEARCH www.lp-research.com 1 INTRODUCTION I. INTRODUCTION Welcome to the LP-RESEARCH Motion Sensor Bluetooth version (LPMS-B) User s Manual!
INTRODUCTION LPMS-B Reference Manual Version 1.1.0 2013 LP-RESEARCH www.lp-research.com 1 INTRODUCTION I. INTRODUCTION Welcome to the LP-RESEARCH Motion Sensor Bluetooth version (LPMS-B) User s Manual!
Testing the Possibilities of Using IMUs with Different Types of Movements
 137 Testing the Possibilities of Using IMUs with Different Types of Movements Kajánek, P. and Kopáčik A. Slovak University of Technology, Faculty of Civil Engineering, Radlinského 11, 81368 Bratislava,
137 Testing the Possibilities of Using IMUs with Different Types of Movements Kajánek, P. and Kopáčik A. Slovak University of Technology, Faculty of Civil Engineering, Radlinského 11, 81368 Bratislava,
9 Degrees of Freedom Inertial Measurement Unit with AHRS [RKI-1430]
![9 Degrees of Freedom Inertial Measurement Unit with AHRS [RKI-1430]](/thumbs/86/94257860.jpg "9 Degrees of Freedom Inertial Measurement Unit with AHRS [RKI-1430]") 9 Degrees of Freedom Inertial Measurement Unit with AHRS [RKI-1430] Users Manual Robokits India info@robokits.co.in http://www.robokitsworld.com Page 1 This 9 Degrees of Freedom (DOF) Inertial Measurement
9 Degrees of Freedom Inertial Measurement Unit with AHRS [RKI-1430] Users Manual Robokits India info@robokits.co.in http://www.robokitsworld.com Page 1 This 9 Degrees of Freedom (DOF) Inertial Measurement
Lecture 13 Visual Inertial Fusion
 Lecture 13 Visual Inertial Fusion Davide Scaramuzza Course Evaluation Please fill the evaluation form you received by email! Provide feedback on Exercises: good and bad Course: good and bad How to improve
Lecture 13 Visual Inertial Fusion Davide Scaramuzza Course Evaluation Please fill the evaluation form you received by email! Provide feedback on Exercises: good and bad Course: good and bad How to improve
Quaternion Kalman Filter Design Based on MEMS Sensors
 , pp.93-97 http://dx.doi.org/10.14257/astl.2014.76.20 Quaternion Kalman Filter Design Based on MEMS Sensors Su zhongbin,yanglei, Kong Qingming School of Electrical and Information. Northeast Agricultural
, pp.93-97 http://dx.doi.org/10.14257/astl.2014.76.20 Quaternion Kalman Filter Design Based on MEMS Sensors Su zhongbin,yanglei, Kong Qingming School of Electrical and Information. Northeast Agricultural
3D Motion Tracking by Inertial and Magnetic sensors with or without GPS
 3D Motion Tracking by Inertial and Magnetic sensors with or without GPS Junping Cai M.Sc. E. E, PhD junping@mci.sdu.dk Centre for Product Development (CPD) Mads Clausen Institute (MCI) University of Southern
3D Motion Tracking by Inertial and Magnetic sensors with or without GPS Junping Cai M.Sc. E. E, PhD junping@mci.sdu.dk Centre for Product Development (CPD) Mads Clausen Institute (MCI) University of Southern
3DM-GX1 Data Communications Protocol
 DCP Manual Version 3.1.02 3DM-GX1 Data Communications Protocol Little Sensors, Big Ideas www.microstrain.com 2010 by MicroStrain, Inc. 459 Hurricane Lane Suite 102 Williston, VT 05495 USA Phone: 802-862-6629
DCP Manual Version 3.1.02 3DM-GX1 Data Communications Protocol Little Sensors, Big Ideas www.microstrain.com 2010 by MicroStrain, Inc. 459 Hurricane Lane Suite 102 Williston, VT 05495 USA Phone: 802-862-6629
Satellite and Inertial Navigation and Positioning System
 Satellite and Inertial Navigation and Positioning System Project Proposal By: Luke Pfister Dan Monroe Project Advisors: Dr. In Soo Ahn Dr. Yufeng Lu EE 451 Senior Capstone Project December 10, 2009 PROJECT
Satellite and Inertial Navigation and Positioning System Project Proposal By: Luke Pfister Dan Monroe Project Advisors: Dr. In Soo Ahn Dr. Yufeng Lu EE 451 Senior Capstone Project December 10, 2009 PROJECT
GPS + Inertial Sensor Fusion
 GPS + Inertial Sensor Fusion Senior Project Proposal Aleksey Lykov, William Tarpley, Anton Volkov Advisors: Dr. In Soo Ahn, Dr. Yufeng Lu Date: November 26, 2013 Project Summary The objective of this project
GPS + Inertial Sensor Fusion Senior Project Proposal Aleksey Lykov, William Tarpley, Anton Volkov Advisors: Dr. In Soo Ahn, Dr. Yufeng Lu Date: November 26, 2013 Project Summary The objective of this project
Charlotte Treffers Luc van Wietmarschen. June 15, 2016
 Position and orientation determination of a probe with use of the IMU MPU9250 and a ATmega328 microcontroller Charlotte Treffers Luc van Wietmarschen June 15, 2016 Position and orientation determination
Position and orientation determination of a probe with use of the IMU MPU9250 and a ATmega328 microcontroller Charlotte Treffers Luc van Wietmarschen June 15, 2016 Position and orientation determination
CS283: Robotics Fall 2016: Sensors
 CS283: Robotics Fall 2016: Sensors Sören Schwertfeger / 师泽仁 ShanghaiTech University Robotics ShanghaiTech University - SIST - 23.09.2016 2 REVIEW TRANSFORMS Robotics ShanghaiTech University - SIST - 23.09.2016
CS283: Robotics Fall 2016: Sensors Sören Schwertfeger / 师泽仁 ShanghaiTech University Robotics ShanghaiTech University - SIST - 23.09.2016 2 REVIEW TRANSFORMS Robotics ShanghaiTech University - SIST - 23.09.2016
Homework 6: Pose Tracking EE267 Virtual Reality 2018
 Homework 6: Pose Tracking EE267 Virtual Reality 218 Due: 5/17/218, 11:59pm Instructions Students should use the Arduino environment and JavaScript for this assignment, building on top of the provided starter
Homework 6: Pose Tracking EE267 Virtual Reality 218 Due: 5/17/218, 11:59pm Instructions Students should use the Arduino environment and JavaScript for this assignment, building on top of the provided starter
Technical Documentation
 Technical Documentation MT9 and MT6 March 24, 2003 version 1.5 2002-2003, Xsens Technologies B.V. Xsens Technologies B.V. Hengelosestraat 705 phone +31-(0)53-4836444 P.O. Box 545 fax +31-(0)53-4836445
Technical Documentation MT9 and MT6 March 24, 2003 version 1.5 2002-2003, Xsens Technologies B.V. Xsens Technologies B.V. Hengelosestraat 705 phone +31-(0)53-4836444 P.O. Box 545 fax +31-(0)53-4836445
State-space models for 3D visual tracking
 SA-1 State-space models for 3D visual tracking Doz. G. Bleser Prof. Stricker Computer Vision: Object and People Tracking Example applications Head tracking, e.g. for mobile seating buck Object tracking,
SA-1 State-space models for 3D visual tracking Doz. G. Bleser Prof. Stricker Computer Vision: Object and People Tracking Example applications Head tracking, e.g. for mobile seating buck Object tracking,
Computationally Efficient Visual-inertial Sensor Fusion for GPS-denied Navigation on a Small Quadrotor
 Computationally Efficient Visual-inertial Sensor Fusion for GPS-denied Navigation on a Small Quadrotor Chang Liu & Stephen D. Prior Faculty of Engineering and the Environment, University of Southampton,
Computationally Efficient Visual-inertial Sensor Fusion for GPS-denied Navigation on a Small Quadrotor Chang Liu & Stephen D. Prior Faculty of Engineering and the Environment, University of Southampton,
Calibration of Inertial Measurement Units Using Pendulum Motion
 Technical Paper Int l J. of Aeronautical & Space Sci. 11(3), 234 239 (2010) DOI:10.5139/IJASS.2010.11.3.234 Calibration of Inertial Measurement Units Using Pendulum Motion Keeyoung Choi* and Se-ah Jang**
Technical Paper Int l J. of Aeronautical & Space Sci. 11(3), 234 239 (2010) DOI:10.5139/IJASS.2010.11.3.234 Calibration of Inertial Measurement Units Using Pendulum Motion Keeyoung Choi* and Se-ah Jang**
Navigational Aids 1 st Semester/2007/TF 7:30 PM -9:00 PM
 Glossary of Navigation Terms accelerometer. A device that senses inertial reaction to measure linear or angular acceleration. In its simplest form, it consists of a case-mounted spring and mass arrangement
Glossary of Navigation Terms accelerometer. A device that senses inertial reaction to measure linear or angular acceleration. In its simplest form, it consists of a case-mounted spring and mass arrangement
BNO055 Quick start guide
 BNO055 Quick start guide Bosch Sensortec Application note: BNO055 Quick start guide Document revision 1.0 Document release date Document number Mar.2015 BST-BNO055-AN007-00 Technical reference code 0 273
BNO055 Quick start guide Bosch Sensortec Application note: BNO055 Quick start guide Document revision 1.0 Document release date Document number Mar.2015 BST-BNO055-AN007-00 Technical reference code 0 273
Dynamic Modelling for MEMS-IMU/Magnetometer Integrated Attitude and Heading Reference System
 International Global Navigation Satellite Systems Society IGNSS Symposium 211 University of New South Wales, Sydney, NSW, Australia 15 17 November, 211 Dynamic Modelling for MEMS-IMU/Magnetometer Integrated
International Global Navigation Satellite Systems Society IGNSS Symposium 211 University of New South Wales, Sydney, NSW, Australia 15 17 November, 211 Dynamic Modelling for MEMS-IMU/Magnetometer Integrated
Rendering for Positional Tracking
 Rendering for Positional Tracking Heather Shen Stanford University Department of Electrical Engineering hcshen@stanford.edu Jason Liu Stanford University Department of Computer Science liujas00@stanford.edu
Rendering for Positional Tracking Heather Shen Stanford University Department of Electrical Engineering hcshen@stanford.edu Jason Liu Stanford University Department of Computer Science liujas00@stanford.edu
DE2.3 Electronics 2. Lab Experiment 3: IMU and OLED Display
 Objectives Dyson School of Design Engineering DE2.3 Electronics 2 Lab Experiment 3: IMU and OLED Display (webpage: http://www.ee.ic.ac.uk/pcheung/teaching/de2_ee/) By the end of this experiment, you should
Objectives Dyson School of Design Engineering DE2.3 Electronics 2 Lab Experiment 3: IMU and OLED Display (webpage: http://www.ee.ic.ac.uk/pcheung/teaching/de2_ee/) By the end of this experiment, you should
Head Tracking for the Oculus Rift
 214 IEEE International Conference on Robotics & Automation (ICRA) Hong Kong Convention and Exhibition Center May 31 - June 7, 214. Hong Kong, China Head Tracking for the Oculus Rift Steven M. LaValle 1
214 IEEE International Conference on Robotics & Automation (ICRA) Hong Kong Convention and Exhibition Center May 31 - June 7, 214. Hong Kong, China Head Tracking for the Oculus Rift Steven M. LaValle 1
Towards the Consumerization of Smart Sensors
 Towards the Consumerization of Smart Sensors Roberto De Nuccio Business Development Manager MEMS, Sensors and High-Performance Analog Division STMicroelectronics Micro-Electro-Mechanical Systems (MEMS)
Towards the Consumerization of Smart Sensors Roberto De Nuccio Business Development Manager MEMS, Sensors and High-Performance Analog Division STMicroelectronics Micro-Electro-Mechanical Systems (MEMS)
A Kalman Filter Based Attitude Heading Reference System Using a Low Cost Inertial Measurement Unit
 Virginia Commonwealth University VCU Scholars Compass Theses and Dissertations Graduate School 213 A Kalman Filter Based Attitude Heading Reference System Using a Low Cost Inertial Measurement Unit Matthew
Virginia Commonwealth University VCU Scholars Compass Theses and Dissertations Graduate School 213 A Kalman Filter Based Attitude Heading Reference System Using a Low Cost Inertial Measurement Unit Matthew
MULTI-SENSOR DATA FUSION FOR LAND VEHICLE ATTITUDE ESTIMATION USING A FUZZY EXPERT SYSTEM
 Data Science Journal, Volume 4, 28 November 2005 127 MULTI-SENSOR DATA FUSION FOR LAND VEHICLE ATTITUDE ESTIMATION USING A FUZZY EXPERT SYSTEM Jau-Hsiung Wang* and Yang Gao Department of Geomatics Engineering,
Data Science Journal, Volume 4, 28 November 2005 127 MULTI-SENSOR DATA FUSION FOR LAND VEHICLE ATTITUDE ESTIMATION USING A FUZZY EXPERT SYSTEM Jau-Hsiung Wang* and Yang Gao Department of Geomatics Engineering,
Autonomous Navigation for Flying Robots
 Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 3.2: Sensors Jürgen Sturm Technische Universität München Sensors IMUs (inertial measurement units) Accelerometers
Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 3.2: Sensors Jürgen Sturm Technische Universität München Sensors IMUs (inertial measurement units) Accelerometers
MPU 9250 C Library. Shivansh Singla
 MPU 9250 C Library Shivansh Singla PREFACE These application notes are used for communicating with MPU 9250 via I2C protocol based on the application notes [1] released by Daniel Fiske, Michael Lam and
MPU 9250 C Library Shivansh Singla PREFACE These application notes are used for communicating with MPU 9250 via I2C protocol based on the application notes [1] released by Daniel Fiske, Michael Lam and
Unscented Kalman Filtering for Attitude Determination Using MEMS Sensors
 Journal of Applied Science and Engineering, Vol. 16, No. 2, pp. 165 176 (2013) DOI: 10.6180/jase.2013.16.2.08 Unscented Kalman Filtering for Attitude Determination Using MEMS Sensors Jaw-Kuen Shiau* and
Journal of Applied Science and Engineering, Vol. 16, No. 2, pp. 165 176 (2013) DOI: 10.6180/jase.2013.16.2.08 Unscented Kalman Filtering for Attitude Determination Using MEMS Sensors Jaw-Kuen Shiau* and
Development of a Ground Based Cooperating Spacecraft Testbed for Research and Education
 DIPARTIMENTO DI INGEGNERIA INDUSTRIALE Development of a Ground Based Cooperating Spacecraft Testbed for Research and Education Mattia Mazzucato, Sergio Tronco, Andrea Valmorbida, Fabio Scibona and Enrico
DIPARTIMENTO DI INGEGNERIA INDUSTRIALE Development of a Ground Based Cooperating Spacecraft Testbed for Research and Education Mattia Mazzucato, Sergio Tronco, Andrea Valmorbida, Fabio Scibona and Enrico
Using SensorTag as a Low-Cost Sensor Array for AutoCAD
 Using SensorTag as a Low-Cost Sensor Array for AutoCAD Kean Walmsley Autodesk SD5013 In 2012 Texas Instruments Inc. launched the SensorTag, a $25 sensor array that communicates via Bluetooth Smart (also
Using SensorTag as a Low-Cost Sensor Array for AutoCAD Kean Walmsley Autodesk SD5013 In 2012 Texas Instruments Inc. launched the SensorTag, a $25 sensor array that communicates via Bluetooth Smart (also
CyberAtom X-202 USER MANUAL. Copyrights Softexor 2015 All Rights Reserved.
 CyberAtom X-202 USER MANUAL Copyrights Softexor 2015 All Rights Reserved. X-202 Contents ii Contents About...5 Block Diagram... 5 Axes Conventions...5 System Startup... 6 Hardware Reset...6 LED indicator...
CyberAtom X-202 USER MANUAL Copyrights Softexor 2015 All Rights Reserved. X-202 Contents ii Contents About...5 Block Diagram... 5 Axes Conventions...5 System Startup... 6 Hardware Reset...6 LED indicator...
Introduction to Inertial Navigation (INS tutorial short)
") Introduction to Inertial Navigation (INS tutorial short) Note 1: This is a short (20 pages) tutorial. An extended (57 pages) tutorial that also includes Kalman filtering is available at http://www.navlab.net/publications/introduction_to
Introduction to Inertial Navigation (INS tutorial short) Note 1: This is a short (20 pages) tutorial. An extended (57 pages) tutorial that also includes Kalman filtering is available at http://www.navlab.net/publications/introduction_to
CHARACTERIZATION AND CALIBRATION OF MEMS INERTIAL MEASUREMENT UNITS
 CHARACTERIZATION AND CALIBRATION OF MEMS INERTIAL MEASUREMENT UNITS ökçen Aslan 1,2, Afşar Saranlı 2 1 Defence Research and Development Institute (SAE), TÜBİTAK 2 Dept. of Electrical and Electronics Eng.,
CHARACTERIZATION AND CALIBRATION OF MEMS INERTIAL MEASUREMENT UNITS ökçen Aslan 1,2, Afşar Saranlı 2 1 Defence Research and Development Institute (SAE), TÜBİTAK 2 Dept. of Electrical and Electronics Eng.,
FACULTY OF SCIENCE AND TECHNOLOGY
 FACULTY OF SCIENCE AND TECHNOLOGY MASTER'S THESIS Study program/specialization: Master in Computer Science Spring semester, 2017 Open Author: Jhon Jairo Gutierrez Lautero (signature author) Instructor:
FACULTY OF SCIENCE AND TECHNOLOGY MASTER'S THESIS Study program/specialization: Master in Computer Science Spring semester, 2017 Open Author: Jhon Jairo Gutierrez Lautero (signature author) Instructor:
Estimation of Altitude and Vertical Velocity for Multirotor Aerial Vehicle using Kalman Filter
 Estimation of Altitude and Vertical Velocity for Multirotor Aerial Vehicle using Kalman Filter Przemys law G asior, Stanis law Gardecki, Jaros law Gośliński and Wojciech Giernacki Poznan University of
Estimation of Altitude and Vertical Velocity for Multirotor Aerial Vehicle using Kalman Filter Przemys law G asior, Stanis law Gardecki, Jaros law Gośliński and Wojciech Giernacki Poznan University of
CyberAtom X-200 USER MANUAL. Copyrights Softexor 2015 All Rights Reserved.
 CyberAtom X-200 USER MANUAL Copyrights Softexor 2015 All Rights Reserved. X-200 Contents ii Contents About...6 Block Diagram... 6 Axes Conventions...6 System Startup... 7 Selecting Power Source...7 Hardware
CyberAtom X-200 USER MANUAL Copyrights Softexor 2015 All Rights Reserved. X-200 Contents ii Contents About...6 Block Diagram... 6 Axes Conventions...6 System Startup... 7 Selecting Power Source...7 Hardware
Vehicle s Kinematics Measurement with IMU
 536441 Vehicle dnamics and control laborator Vehicle s Kinematics Measurement with IMU This laborator is design to introduce ou to understand and acquire the inertia properties for using in the vehicle
536441 Vehicle dnamics and control laborator Vehicle s Kinematics Measurement with IMU This laborator is design to introduce ou to understand and acquire the inertia properties for using in the vehicle
Collaboration is encouraged among small groups (e.g., 2-3 students).
.") Assignments Policies You must typeset, choices: Word (very easy to type math expressions) Latex (very easy to type math expressions) Google doc Plain text + math formula Your favorite text/doc editor Submit
Assignments Policies You must typeset, choices: Word (very easy to type math expressions) Latex (very easy to type math expressions) Google doc Plain text + math formula Your favorite text/doc editor Submit
EE565:Mobile Robotics Lecture 2
 EE565:Mobile Robotics Lecture 2 Welcome Dr. Ing. Ahmad Kamal Nasir Organization Lab Course Lab grading policy (40%) Attendance = 10 % In-Lab tasks = 30 % Lab assignment + viva = 60 % Make a group Either
EE565:Mobile Robotics Lecture 2 Welcome Dr. Ing. Ahmad Kamal Nasir Organization Lab Course Lab grading policy (40%) Attendance = 10 % In-Lab tasks = 30 % Lab assignment + viva = 60 % Make a group Either
DEVELOPMENT OF A PEDESTRIAN INDOOR NAVIGATION SYSTEM BASED ON MULTI-SENSOR FUSION AND FUZZY LOGIC ESTIMATION ALGORITHMS
 The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Volume XL-4/W5, 215 Indoor-Outdoor Seamless Modelling, Mapping and Navigation, 21 22 May 215, Tokyo, Japan
The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Volume XL-4/W5, 215 Indoor-Outdoor Seamless Modelling, Mapping and Navigation, 21 22 May 215, Tokyo, Japan
SH-2 Reference Manual
 SH-2 Reference Manual Document Number: 1000-3625 Document Revision: 1.2 Date: 05/19/2017 Hillcrest Laboratories, Inc. 15245 Shady Grove Road, Suite 400 Rockville, MD 20850 Copyright 2017 Hillcrest Labs,
SH-2 Reference Manual Document Number: 1000-3625 Document Revision: 1.2 Date: 05/19/2017 Hillcrest Laboratories, Inc. 15245 Shady Grove Road, Suite 400 Rockville, MD 20850 Copyright 2017 Hillcrest Labs,
DriftLess Technology to improve inertial sensors
 Slide 1 of 19 DriftLess Technology to improve inertial sensors Marcel Ruizenaar, TNO marcel.ruizenaar@tno.nl Slide 2 of 19 Topics Problem, Drift in INS due to bias DriftLess technology What is it How it
Slide 1 of 19 DriftLess Technology to improve inertial sensors Marcel Ruizenaar, TNO marcel.ruizenaar@tno.nl Slide 2 of 19 Topics Problem, Drift in INS due to bias DriftLess technology What is it How it
Evaluation of a Low-Cost MEMS IMU for Indoor Positioning System
 International Journal of Emerging Science and Engineering (IJESE) ISSN: 2319 6378, Volume-1, Issue-11, September 2013 Evaluation of a Low-Cost MEMS IMU for Indoor Positioning System Md. Galib Hasan, Md.
International Journal of Emerging Science and Engineering (IJESE) ISSN: 2319 6378, Volume-1, Issue-11, September 2013 Evaluation of a Low-Cost MEMS IMU for Indoor Positioning System Md. Galib Hasan, Md.
Fusing Sensors into Mobile Operating Systems & Innovative Use Cases
 Fusing Sensors into Mobile Operating Systems & Innovative Use Cases May 23, 2012 Tristan Joo (tristanjoo@wca.org) Board Director & Co-Chair of Mobile SIG Wireless Communications Alliance, Independent Executive
Fusing Sensors into Mobile Operating Systems & Innovative Use Cases May 23, 2012 Tristan Joo (tristanjoo@wca.org) Board Director & Co-Chair of Mobile SIG Wireless Communications Alliance, Independent Executive
Error Simulation and Multi-Sensor Data Fusion
 Error Simulation and Multi-Sensor Data Fusion AERO4701 Space Engineering 3 Week 6 Last Week Looked at the problem of attitude determination for satellites Examined several common methods such as inertial
Error Simulation and Multi-Sensor Data Fusion AERO4701 Space Engineering 3 Week 6 Last Week Looked at the problem of attitude determination for satellites Examined several common methods such as inertial
Indoor navigation using smartphones. Chris Hide IESSG, University of Nottingham, UK
 Indoor navigation using smartphones Chris Hide IESSG, University of Nottingham, UK Overview Smartphones Available sensors Current positioning methods Positioning research at IESSG 1. Wi-Fi fingerprinting
Indoor navigation using smartphones Chris Hide IESSG, University of Nottingham, UK Overview Smartphones Available sensors Current positioning methods Positioning research at IESSG 1. Wi-Fi fingerprinting
Inertial Navigation Static Calibration
 INTL JOURNAL OF ELECTRONICS AND TELECOMMUNICATIONS, 2018, VOL. 64, NO. 2, PP. 243 248 Manuscript received December 2, 2017; revised April, 2018. DOI: 10.24425/119518 Inertial Navigation Static Calibration
INTL JOURNAL OF ELECTRONICS AND TELECOMMUNICATIONS, 2018, VOL. 64, NO. 2, PP. 243 248 Manuscript received December 2, 2017; revised April, 2018. DOI: 10.24425/119518 Inertial Navigation Static Calibration
3D Transformations. CS 4620 Lecture 10. Cornell CS4620 Fall 2014 Lecture Steve Marschner (with previous instructors James/Bala)
") 3D Transformations CS 4620 Lecture 10 1 Translation 2 Scaling 3 Rotation about z axis 4 Rotation about x axis 5 Rotation about y axis 6 Properties of Matrices Translations: linear part is the identity
3D Transformations CS 4620 Lecture 10 1 Translation 2 Scaling 3 Rotation about z axis 4 Rotation about x axis 5 Rotation about y axis 6 Properties of Matrices Translations: linear part is the identity
Inertial Navigation Systems
 Inertial Navigation Systems Kiril Alexiev University of Pavia March 2017 1 /89 Navigation Estimate the position and orientation. Inertial navigation one of possible instruments. Newton law is used: F =
Inertial Navigation Systems Kiril Alexiev University of Pavia March 2017 1 /89 Navigation Estimate the position and orientation. Inertial navigation one of possible instruments. Newton law is used: F =
Sensor fusion for motion processing and visualization
 Sensor fusion for motion processing and visualization Ali Baharev, PhD TÁMOP 4.2.2 Szenzorhálózat alapú adatgyűjtés és információfeldolgozás workshop April 1, 2011 Budapest, Hungary What we have - Shimmer
Sensor fusion for motion processing and visualization Ali Baharev, PhD TÁMOP 4.2.2 Szenzorhálózat alapú adatgyűjtés és információfeldolgozás workshop April 1, 2011 Budapest, Hungary What we have - Shimmer
EE 570: Location and Navigation: Theory & Practice
 EE 570: Location and Navigation: Theory & Practice Navigation Sensors and INS Mechanization Thursday 14 Feb 2013 NMT EE 570: Location and Navigation: Theory & Practice Slide 1 of 14 Inertial Sensor Modeling
EE 570: Location and Navigation: Theory & Practice Navigation Sensors and INS Mechanization Thursday 14 Feb 2013 NMT EE 570: Location and Navigation: Theory & Practice Slide 1 of 14 Inertial Sensor Modeling
IMU06WP. What is the IMU06?
 IMU06 What is the IMU06? The IMU06 is a compact 6 degree of freedom inertial measurement unit. It provides 3 axis acceleration (maximum 10G) and angular velocities (maximum 300 degrees/s) on both CAN and
IMU06 What is the IMU06? The IMU06 is a compact 6 degree of freedom inertial measurement unit. It provides 3 axis acceleration (maximum 10G) and angular velocities (maximum 300 degrees/s) on both CAN and
Keeping a Good Attitude: A Quaternion-Based Orientation Filter for IMUs and MARGs
 City University of New York (CUNY) CUNY Academic Works Publications and Research City College of New York August 2015 Keeping a Good Attitude: A Quaternion-Based Orientation Filter for IMUs and MARGs Roberto
City University of New York (CUNY) CUNY Academic Works Publications and Research City College of New York August 2015 Keeping a Good Attitude: A Quaternion-Based Orientation Filter for IMUs and MARGs Roberto
Real-time Gesture Pattern Classification with IMU Data
 Real-time Gesture Pattern Classification with IMU Data Alex Fu Stanford University Computer Science Department alexfu@stanford.edu Yangyang Yu Stanford University Electrical Engineering Department yyu10@stanford.edu
Real-time Gesture Pattern Classification with IMU Data Alex Fu Stanford University Computer Science Department alexfu@stanford.edu Yangyang Yu Stanford University Electrical Engineering Department yyu10@stanford.edu
Testing Approaches for Characterization and Selection of MEMS Inertial Sensors 2016, 2016, ACUTRONIC 1
 Testing Approaches for Characterization and Selection of MEMS Inertial Sensors by Dino Smajlovic and Roman Tkachev 2016, 2016, ACUTRONIC 1 Table of Contents Summary & Introduction 3 Sensor Parameter Definitions
Testing Approaches for Characterization and Selection of MEMS Inertial Sensors by Dino Smajlovic and Roman Tkachev 2016, 2016, ACUTRONIC 1 Table of Contents Summary & Introduction 3 Sensor Parameter Definitions
This design tip applies to all accelerometers, ecompass modules, and inemo inertial IMUs from STMicroelectronics.
 DT0106 Design tip Residual linear acceleration by gravity subtraction to enable dead-reckoning By Andrea Vitali Purpose and benefits This design tip explains how to compute the residual linear acceleration,
DT0106 Design tip Residual linear acceleration by gravity subtraction to enable dead-reckoning By Andrea Vitali Purpose and benefits This design tip explains how to compute the residual linear acceleration,
MTRX4700 Experimental Robotics
 MTRX 4700 : Experimental Robotics Lecture 2 Stefan B. Williams Slide 1 Course Outline Week Date Content Labs Due Dates 1 5 Mar Introduction, history & philosophy of robotics 2 12 Mar Robot kinematics &
MTRX 4700 : Experimental Robotics Lecture 2 Stefan B. Williams Slide 1 Course Outline Week Date Content Labs Due Dates 1 5 Mar Introduction, history & philosophy of robotics 2 12 Mar Robot kinematics &
Embedded Motion Driver Tutorial
 InvenSense Inc. 1197 Borregas Ave., Sunnyvale, CA 94089 U.S.A. Tel: +1 (408) 988-7339 Fax: +1 (408) 988-8104 Website: www.invensense.com Embedded Motion Driver 5.1.1 Tutorial A printed copy of this document
InvenSense Inc. 1197 Borregas Ave., Sunnyvale, CA 94089 U.S.A. Tel: +1 (408) 988-7339 Fax: +1 (408) 988-8104 Website: www.invensense.com Embedded Motion Driver 5.1.1 Tutorial A printed copy of this document
SIMA Raw Data Simulation Software for the Development and Validation of Algorithms. Platforms
 FIG working week 2012 Rome SIMA Raw Data Simulation Software for the Development and Validation of Algorithms for GNSS and MEMS based Multi Sensor Navigation Platforms Andreas Hoscislawski HS Karlsruhe,
FIG working week 2012 Rome SIMA Raw Data Simulation Software for the Development and Validation of Algorithms for GNSS and MEMS based Multi Sensor Navigation Platforms Andreas Hoscislawski HS Karlsruhe,
Movit System G1 WIRELESS MOTION DEVICE SYSTEM
 Movit System G1 WIRELESS MOTION DEVICE SYSTEM 1 INTRODUCTION The Movit System G1 incorporates multiple wireless motion devices (Movit G1) with the Dongle G1 station, dedicated software and a set of full
Movit System G1 WIRELESS MOTION DEVICE SYSTEM 1 INTRODUCTION The Movit System G1 incorporates multiple wireless motion devices (Movit G1) with the Dongle G1 station, dedicated software and a set of full
Low Cost solution for Pose Estimation of Quadrotor
 Low Cost solution for Pose Estimation of Quadrotor mangal@iitk.ac.in https://www.iitk.ac.in/aero/mangal/ Intelligent Guidance and Control Laboratory Indian Institute of Technology, Kanpur Mangal Kothari
Low Cost solution for Pose Estimation of Quadrotor mangal@iitk.ac.in https://www.iitk.ac.in/aero/mangal/ Intelligent Guidance and Control Laboratory Indian Institute of Technology, Kanpur Mangal Kothari
LPMS Reference Manual
 INTRODUCTION LPMS Reference Manual Version 1.3.4 LPMS-B (Standard / OEM) LPMS-CU (Standard / OEM) LPMS-CANAL LPMS-UARTAL LPMS-USBAL LPMS-CURS 1 INTRODUCTION I. INTRODUCTION Welcome to the LP-RESEARCH Motion
INTRODUCTION LPMS Reference Manual Version 1.3.4 LPMS-B (Standard / OEM) LPMS-CU (Standard / OEM) LPMS-CANAL LPMS-UARTAL LPMS-USBAL LPMS-CURS 1 INTRODUCTION I. INTRODUCTION Welcome to the LP-RESEARCH Motion
CHAPTER 2 SENSOR DATA SIMULATION: A KINEMATIC APPROACH
 27 CHAPTER 2 SENSOR DATA SIMULATION: A KINEMATIC APPROACH 2.1 INTRODUCTION The standard technique of generating sensor data for navigation is the dynamic approach. As revealed in the literature (John Blakelock
27 CHAPTER 2 SENSOR DATA SIMULATION: A KINEMATIC APPROACH 2.1 INTRODUCTION The standard technique of generating sensor data for navigation is the dynamic approach. As revealed in the literature (John Blakelock
MEMS technology quality requirements as applied to multibeam echosounder. Jerzy DEMKOWICZ, Krzysztof BIKONIS
 MEMS technology quality requirements as applied to multibeam echosounder Jerzy DEMKOWICZ, Krzysztof BIKONIS Gdansk University of Technology Gdansk, Narutowicza str. 11/12, Poland demjot@eti.pg.gda.pl Small,
MEMS technology quality requirements as applied to multibeam echosounder Jerzy DEMKOWICZ, Krzysztof BIKONIS Gdansk University of Technology Gdansk, Narutowicza str. 11/12, Poland demjot@eti.pg.gda.pl Small,
Application Guidelines for MEMS Compass
 Application Guidelines for MEMS Compass 12 April 2013 AMS Application Team Application RtM Agenda 2 Educational part: What is compass? How magnetic compass works, MEMS Magnetometer used as a compass ST
Application Guidelines for MEMS Compass 12 April 2013 AMS Application Team Application RtM Agenda 2 Educational part: What is compass? How magnetic compass works, MEMS Magnetometer used as a compass ST
Modern Robotics Inc. Sensor Documentation
 Sensor Documentation Version 1.0.1 September 9, 2016 Contents 1. Document Control... 3 2. Introduction... 4 3. Three-Wire Analog & Digital Sensors... 5 3.1. Program Control Button (45-2002)... 6 3.2. Optical
Sensor Documentation Version 1.0.1 September 9, 2016 Contents 1. Document Control... 3 2. Introduction... 4 3. Three-Wire Analog & Digital Sensors... 5 3.1. Program Control Button (45-2002)... 6 3.2. Optical
Unscented Kalman Filter for 3D Attitude Estimation Final Project
 Unscented Kalman Filter for 3D Attitude Estimation 1.3 Final Project Matthew Vernacchia Department of Aeronautics and Astronautics Massachusetts Institute of Technology Email: mvernacc@mit.edu Abstract
Unscented Kalman Filter for 3D Attitude Estimation 1.3 Final Project Matthew Vernacchia Department of Aeronautics and Astronautics Massachusetts Institute of Technology Email: mvernacc@mit.edu Abstract
Use of Image aided Navigation for UAV Navigation and Target Geolocation in Urban and GPS denied Environments
 Use of Image aided Navigation for UAV Navigation and Target Geolocation in Urban and GPS denied Environments Precision Strike Technology Symposium Alison K. Brown, Ph.D. NAVSYS Corporation, Colorado Phone:
Use of Image aided Navigation for UAV Navigation and Target Geolocation in Urban and GPS denied Environments Precision Strike Technology Symposium Alison K. Brown, Ph.D. NAVSYS Corporation, Colorado Phone:
V ARIENSE SENSE Y O UR W ORLD. Inertial Measurement Unit VMU931. User Guide. Version 1.3. March VARIENSE INC.
 V ARIENSE SENSE Y O UR W ORLD Inertial Measurement Unit VMU931 Version 1.3 March 2018 2017 VARIENSE INC. Contents 1 Product Overview 1 2 Safety 2 3 Setup 3 3.1 Mounting the sensor...........................................
V ARIENSE SENSE Y O UR W ORLD Inertial Measurement Unit VMU931 Version 1.3 March 2018 2017 VARIENSE INC. Contents 1 Product Overview 1 2 Safety 2 3 Setup 3 3.1 Mounting the sensor...........................................
CENG4480 Embedded System Development and Applications The Chinese University of Hong Kong Laboratory 6: IMU (Inertial Measurement Unit)
") CENG4480 Embedded System Development and Applications The Chinese University of Hong Kong Laboratory 6: IMU (Inertial Measurement Unit) Student ID: 2018 Fall 1 Introduction In this exercise you will learn
CENG4480 Embedded System Development and Applications The Chinese University of Hong Kong Laboratory 6: IMU (Inertial Measurement Unit) Student ID: 2018 Fall 1 Introduction In this exercise you will learn
ME 597: AUTONOMOUS MOBILE ROBOTICS SECTION 2 COORDINATE TRANSFORMS. Prof. Steven Waslander
 ME 597: AUTONOMOUS MOILE ROOTICS SECTION 2 COORDINATE TRANSFORMS Prof. Steven Waslander OUTLINE Coordinate Frames and Transforms Rotation Matrices Euler Angles Quaternions Homogeneous Transforms 2 COORDINATE
ME 597: AUTONOMOUS MOILE ROOTICS SECTION 2 COORDINATE TRANSFORMS Prof. Steven Waslander OUTLINE Coordinate Frames and Transforms Rotation Matrices Euler Angles Quaternions Homogeneous Transforms 2 COORDINATE
Bluetooth Embedded Inertial Measurement Unit for Real-Time Data Collection for Gait Analysis
 Bluetooth Embedded Inertial Measurement Unit for Real-Time Data Collection for Gait Analysis Ravi Chandrasiri Sri Lanka Institute of Information Technology Colombo, Sri Lanka ravi.chandrasiri@gmail.com
Bluetooth Embedded Inertial Measurement Unit for Real-Time Data Collection for Gait Analysis Ravi Chandrasiri Sri Lanka Institute of Information Technology Colombo, Sri Lanka ravi.chandrasiri@gmail.com
UM2220. Getting started with MotionFX sensor fusion library in X-CUBE-MEMS1 expansion for STM32Cube. User manual. Introduction
 User manual Getting started with MotionFX sensor fusion library in X-CUBE-MEMS1 expansion for STM32Cube Introduction The MotionFX is a middleware library component of the X-CUBE-MEMS1 software and runs
User manual Getting started with MotionFX sensor fusion library in X-CUBE-MEMS1 expansion for STM32Cube Introduction The MotionFX is a middleware library component of the X-CUBE-MEMS1 software and runs
EE565:Mobile Robotics Lecture 3
 EE565:Mobile Robotics Lecture 3 Welcome Dr. Ahmad Kamal Nasir Today s Objectives Motion Models Velocity based model (Dead-Reckoning) Odometry based model (Wheel Encoders) Sensor Models Beam model of range
EE565:Mobile Robotics Lecture 3 Welcome Dr. Ahmad Kamal Nasir Today s Objectives Motion Models Velocity based model (Dead-Reckoning) Odometry based model (Wheel Encoders) Sensor Models Beam model of range
Combined GPS and Inertial Navigation System
 Combined GPS and Inertial Navigation System By Andrew Aubry Advised by Dr. In Soo Ahn Dr. Yufeng Lu January 17, 2016 Electrical and Computer Engineering Department Bradley University 1501 W Bradley Ave
Combined GPS and Inertial Navigation System By Andrew Aubry Advised by Dr. In Soo Ahn Dr. Yufeng Lu January 17, 2016 Electrical and Computer Engineering Department Bradley University 1501 W Bradley Ave
INERTIAL NAVIGATION SYSTEM DEVELOPED FOR MEMS APPLICATIONS
 INERTIAL NAVIGATION SYSTEM DEVELOPED FOR MEMS APPLICATIONS P. Lavoie 1, D. Li 2 and R. Jr. Landry 3 NRG (Navigation Research Group) of LACIME Laboratory École de Technologie Supérieure 1100, Notre Dame
INERTIAL NAVIGATION SYSTEM DEVELOPED FOR MEMS APPLICATIONS P. Lavoie 1, D. Li 2 and R. Jr. Landry 3 NRG (Navigation Research Group) of LACIME Laboratory École de Technologie Supérieure 1100, Notre Dame
Technical Document Compensating. for Tilt, Hard Iron and Soft Iron Effects
 Technical Document Compensating for Tilt, Hard Iron and Soft Iron Effects Published: August 6, 2008 Updated: December 4, 2008 Author: Christopher Konvalin Revision: 1.2 www.memsense.com 888.668.8743 Rev:
Technical Document Compensating for Tilt, Hard Iron and Soft Iron Effects Published: August 6, 2008 Updated: December 4, 2008 Author: Christopher Konvalin Revision: 1.2 www.memsense.com 888.668.8743 Rev:
Head Mounted Display Optics I!
 ! Head Mounted Display Optics I! Gordon Wetzstein! Stanford University! EE 267 Virtual Reality! Lecture 7! stanford.edu/class/ee267/!! ! Logistics! HW3 is probably the longest homework, so get started
! Head Mounted Display Optics I! Gordon Wetzstein! Stanford University! EE 267 Virtual Reality! Lecture 7! stanford.edu/class/ee267/!! ! Logistics! HW3 is probably the longest homework, so get started
MEAM 620: HW 1. Sachin Chitta Assigned: January 10, 2007 Due: January 22, January 10, 2007
 MEAM 620: HW 1 Sachin Chitta (sachinc@grasp.upenn.edu) Assigned: January 10, 2007 Due: January 22, 2006 January 10, 2007 1: MATLAB Programming assignment Using MATLAB, write the following functions: 1.
MEAM 620: HW 1 Sachin Chitta (sachinc@grasp.upenn.edu) Assigned: January 10, 2007 Due: January 22, 2006 January 10, 2007 1: MATLAB Programming assignment Using MATLAB, write the following functions: 1.
CS 445 / 645 Introduction to Computer Graphics. Lecture 21 Representing Rotations
 CS 445 / 645 Introduction to Computer Graphics Lecture 21 Representing Rotations Parameterizing Rotations Straightforward in 2D A scalar, θ, represents rotation in plane More complicated in 3D Three scalars
CS 445 / 645 Introduction to Computer Graphics Lecture 21 Representing Rotations Parameterizing Rotations Straightforward in 2D A scalar, θ, represents rotation in plane More complicated in 3D Three scalars
This was written by a designer of inertial guidance machines, & is correct. **********************************************************************
 EXPLANATORY NOTES ON THE SIMPLE INERTIAL NAVIGATION MACHINE How does the missile know where it is at all times? It knows this because it knows where it isn't. By subtracting where it is from where it isn't
EXPLANATORY NOTES ON THE SIMPLE INERTIAL NAVIGATION MACHINE How does the missile know where it is at all times? It knows this because it knows where it isn't. By subtracting where it is from where it isn't
Sensing our world PRODUCT OVERVIEW
 Bosch Sensortec MEMS sensors and solutions Sensing our world PRODUCT OVERVIEW Bosch Sensortec Worldwide presence Kusterdingen Germany Dresden Germany Munich Germany Beijing China Seoul Korea Tokyo Japan
Bosch Sensortec MEMS sensors and solutions Sensing our world PRODUCT OVERVIEW Bosch Sensortec Worldwide presence Kusterdingen Germany Dresden Germany Munich Germany Beijing China Seoul Korea Tokyo Japan
Micro:bit - an Educational & Creative Tool for Kids
 Micro:bit - an Educational & Creative Tool for Kids SKU:DFR0497 INTRODUCTION micro:bit is a pocket-sized microcontroller designed for kids and beginners learning how to program, letting them easily bring
Micro:bit - an Educational & Creative Tool for Kids SKU:DFR0497 INTRODUCTION micro:bit is a pocket-sized microcontroller designed for kids and beginners learning how to program, letting them easily bring