arxiv: v1 [cs.cv] 29 Sep 2016
|
|
|
- Opal Sutton
- 6 years ago
- Views:
Transcription
1 arxiv: v1 [cs.cv] 29 Sep 2016 Two-stage Convolutional Part Heatmap Regression for the 1st 3D Face Alignment in the Wild (3DFAW) Challenge Adrian Bulat and Georgios Tzimiropoulos Computer Vision Laboratory, University of Nottingham, Nottingham, UK Abstract. This paper describes our submission to the 1st 3D Face Alignment in the Wild (3DFAW) Challenge. Our method builds upon the idea of convolutional part heatmap regression [1], extending it for 3D face alignment. Our method decomposes the problem into two parts: (a) X,Y (2D) estimation and (b) Z (depth) estimation. At the first stage, our method estimates the X,Y coordinates of the facial landmarks by producing a set of 2D heatmaps, one for each landmark, using convolutional part heatmap regression. Then, these heatmaps, alongside the input RGB image, are used as input to a very deep subnetwork trained via residual learning for regressing the Z coordinate. Our method ranked 1st in the 3DFAW Challenge, surpassing the second best result by more than 22%. Code can be found at Keywords: 3D face alignment, Convolutional Neural Networks, Convolutional Part Heatmap Regression 1 Introduction Face alignment is the problem of localizing a set of facial landmarks in 2D images. It is a well-studied problem in Computer Vision research, yet most of prior work [2, 3], datasets [4, 5] and challenges [5, 6] have focused on frontal images. However, under a totally unconstrained scenario, faces might be in arbitrary poses. To address this limitation of prior work, recently, a few methods have been proposed for large pose face alignment [7 10]. 3D face alignment goes one step further by treating the face as a full 3D object and attempting to localize the facial landmarks in 3D space. To boost research in 3D face alignment, the 1st Workshop on 3D Face Alignment in the Wild (3DFAW) & Challenge is organized in conjunction with ECCV 2016 [11]. In this paper, we describe a Convolutional Neural Network (CNN) architecture for 3D face alignment, that ranked 1st in the 3DFAW Challenge, surpassing the second best result by more than 22%. Our method is a CNN cascade consisting of three connected subnetworks, all learned via residual learning [12, 13]. See Fig. 1. The first two subnetworks perform residual part heatmap regression [1] for estimating the X,Y coordinates of the facial landmarks. As in [1], the first subnetwork is a part detection network

2 2 Adrian Bulat, Georgios Tzimiropoulos trained to detect the individual facial landmarks using a per-pixel softmax loss. The output of this subnetwork is a set of N landmark detection heatmaps. The second subnetwork is a regression subnetwork that jointly regresses the landmark detection heatmaps stacked with image features to confidence maps representing the location of the landmarks. Then, on top of the first two subnetworks, we added a third very deep subnetwork that estimates the Z coordinate of each fiducial point. The newly introduced network is guided by the heatmaps produced by the 2D regression subnetwork and subsequently learns where to look by explicitly exploiting information about the 2D location of the landmarks. We show that the proposed method produces remarkable fitting results for both X,Y and Z coordinates, securing the first place on the 3DFAW Challenge. This paper is organized as follows: section 2 describes our system in detail. Section 3 describes the experiments performed and our results on the 3DFAW dataset. Finally, section 4 summarizes our contributions and concludes the paper. 2 Method z x,y,z x,y Fig. 1: The system submitted to the 3DFAW Challenge. The part detection and regression subnetworks implement convolutional part heatmap regression, as described in [1], and produce a series of N heatmaps, one for the X,Y location of each landmark. They are both very deep networks trained via residual learning [13]. The produced heatmaps are then stacked alongside the input RGB image, and used as input to the Z regressor which regresses the depth of each point. The architecture for the Z regressor is based on ResNet [13], as described in section 2.2. The proposed method adopts a divide et impera technique, splitting the 3D facial landmark estimation problem into two tasks as follows: The first task estimates the X,Y coordinates of the facial landmarks and produces a series of N regression heatmaps, one for each landmark, using the network described in section 2.1. The second task, described in section 2.2, predicts the Z coordinate (i.e. the depth of each landmark), using as input the stacked heatmaps produced
3 Title Suppressed Due to Excessive Length 3 by the first task, alongside the input RGB image. The overall architecture is illustrated in Fig D (X,Y) landmark heatmap regression The first part of our system estimates the X,Y coordinates of each facial landmark using part heatmap regression [1]. The network consists of two connected subnetworks, the first of which performs landmark detection while the second one refines the initial estimation of the landmarks location via regression. Both networks are very deep been trained via residual learning [12, 13]. In the following, we briefly describe the two subnetworks; the exact network architecture and layer specification for each of them are described in detail in [1]. Landmark detection subnetwork. The architecture of the landmark detection network is based on a ResNet-152 model [12]. The network was adapted for landmark localization by: (1) removing the fully connected layer alongside the preceding average pooling layer, (2) changing the stride of the 5th block from 2 to 1 pixels, and (3) adding at the end a deconvolution [14] followed by a fully convolutional layer. These changes convert the model to a fully convolutional network, recovering to some extent the lost spatial resolution. The ground truth was encoded as a set of N binary maps (one for each landmark), where the values located within the radius of the provided ground truth landmark are set to 1, while the rest to 0. The radius defining the correct location was empirically set to 7 pixels, for a face with a bounding box height equal to approximately 220 pixels. The network was trained using the pixel wise sigmoid cross entropy loss function. Landmark regression subnetwork. As in [1], the regression subnetwork plays the role of a graphical model aiming to refine the initial prediction of the landmark detection network. It is based on a modified version of the hourglass network [15]. The hourglass network starts from the idea presented in [16], improving a few important concepts: (1) it updates the model using residual learning [12, 13], and (2) introduces an efficient way to analyze and recombine features at different resolutions. Finally, as in [1], we replaced the original nearest neighbour upsampling of [15] by learnable deconvolutional layers, and added another deconvolutional layer in the end that brings the output to the input resolution. The network was then trained using a pixel wise L2 loss function. 2.2 Z regression In this section, we introduce a third subnetwork for estimating the Z coordinate i.e. the depth of each landmark. As with the X,Y coordinates, the estimation of the Z coordinate is performed jointly for all landmarks. The input to the Z regressor subnetwork is the stacked regression heatmaps produced by the regression subnetwork alongside the input RGB image. The use of the stacked heatmaps is a key feature of the subnetwork as they provide pose-related information (encoded by the X,Y location of all the landmarks) and guide the network where to look, explicitly showing where the depth should be estimated.

4 4 Adrian Bulat, Georgios Tzimiropoulos Fig. 2: The architecture of the Z regression subnetwork. The network is based on ResNet-200 (with preactivation) and its composing blocks. The blocks B1-B6 are defined in Table 1. See also text.. Table 1: Block specification for the Z regression network. Torch notations (channels, kernel, stride) and (kernel, stride) are used to define the conv and pooling layers. The bottleneck modules are defined as in [13]. B1 B2 B3 B4 B5 B6 1x conv layer 3x bottleneck 24x 38x 3x bottleneck 1x fully (64,7x7,2x2) 1x pooling (3x3, 2x2) modules [(64,1x1), (64,3x3), (256,1x1)] bottleneck modules [(128,1x1), (128,3x3), (512,1x1)] bottleneck modules [(256,1x1), (256,3x3), (1024,1x1)] modules [(512,1x1), (512,3x3), (2048,1x1)] connected layer (66) We encode each landmark as a heatmap using a 2D Gaussian with std=6 pixels centered at the X,Y coordinates of that landmark. The proposed Z regression network is based on the latest ResNet-200 network with preactivation modules [13] modified as follows: in order to adapt the model for 1D regression, we replaced the last fully connected layer (used for classification) with one that has N output channels, one for each landmark. Additionally, the first convolutional layer of the network was modified to accommodate 3+N input channels. The network is described in detail in Figure 2 and Table 1. All newly introduced filters were initialized randomly using a Gaussian distribution. Finally, the network was trained using the L2 loss: l 2 = 1 N N ( z n z n ) 2, (1) n=1 where z n and z n are the predicted and ground truth Z values (in pixels) for the nth landmark. 2.3 Training For training, all images were cropped around an extended (by 20-25%) bounding box, and then resized so that the final cropped image had a resolution of 384x384 pixels. While batch normalization is known to prevent overfitting to some extent, we additionally augmented the data with a set of image transformations applied randomly: flipping, in-plane rotation (between 35 o and 35 o ), scaling (between 0.85 and 1.15) and colour jittering. While the entire system, shown in Fig.1,
5 Title Suppressed Due to Excessive Length 5 can be trained jointly from the beginning, in order to accelerate convergence we trained each task independently. For 2D (X,Y) landmark heatmap regression, the network was fine-tuned from a pretrained model on the large ImageNet [17] dataset, with the newly introduced layers initialized with zeros. The detection component was then trained for 30 epochs with a learning rate progressively decreasing from 1e 3 to 2.5e 5. The regression subnetwork, based on the hourglass architecture was trained for 30 epochs using a learning rate that varied from 1e 4 to 2.5e 5. During this, the learning rate for the detection subnetwork was frozen. All the newly introduced deconvolutional layers were initialised using the bilinear upsampling filters. Finally, the subnetworks were trained jointly for 30 more epochs. For Z regression, we again fine-tuned from a model previously trained on ImageNet [17]; this time we used a ResNet-200 network [13]. The newly introduced filters in the first convolutional layer were initialized from a Gaussian distribution with std=0.01. The same applied for the fully connected layer added at the end of the network. During training, we used as input to the Z regression network both the heatmaps generated from the ground truth landmark locations and the ones estimated by the first task. We trained the subnetwork for about 100 epochs with a learning rate varying from 1e 2 to 2.5e 4. The network was implemented and trained using Torch7 [18] on two Titan X 12Gb GPUs using a batch of 8 and 16 images for X,Y landmark heatmap regression and Z regression, respectively. 3 Experimental results In this section, we present the performance of our system on the 3DFAW dataset. Dataset. We trained and tested our model on the 3D Face Alignment in the Wild (3DFAW) dataset. [19 22] The dataset contains images from a wide range of conditions, captured in both controlled and in-the-wild settings. The dataset includes images from MultiPIE [19] and BP4D [21] as well as images collected from the Internet. All images were annotated in a consistent way with 66 3D fiducial points. The final model was trained on the training set (13672 images) and the validation set (4725 images), and tested on the test set containing 4912 images. We also report results on the validation set with a model trained on the training set, only. Metrics. Evaluation was performed using two different metrics: Ground Truth Error(GTE) and Cross View Ground Truth Consistency Error(CVGTCE). GTE measures the average point-to-point Euclidean error normalized by the inter-ocular distance, as in [5]. GTE is calculated as follows: E(X, Y) = 1 N N n=1 x n y n 2 d i, (2) where X is the predicted set of points, Y is their corresponding ground truth and d i denotes the interocular distance for the ith image.
6 6 Adrian Bulat, Georgios Tzimiropoulos CVGTCE evaluates the cross-view consistency of the predicted landmarks of the same subject and is defined as follows: E vc (X, Y, T ) = 1 N N n=1 srx n y n 2 d i, (3) where P = {s, R, t} denotes scale, rotation and translation, respectively. CVGTCE is computed as follows: {s, R, t} = argmin s,r,t N yk (srx k + t) 2. (4) 2 n=1 Results. Table 2 shows the performance of our system on the 3DFAW test set, as provided by the 3DFAW Challenge team. As it can be observed, our system outperforms the second best method (the result is taken from the 3DFAW Challenge website) in terms of GTE by more than 22%. Table 2: Performance on the 3DFAW test set. Method GTE (%) CVGTCE (%) Ours Second best In order to better understand the performance of our system, we also report results on the validation set using a model trained on the training set, only. To measure performance, we used the Ground Truth Error measured on (X,Y), (X,Y,Z), X alone, Y alone and Z alone, and report the cumulative curve corresponding to the fraction of images for which the error was less than a specific value. Results are reported in Fig.3 and Table 3. It can be observed that our system performs better on predicting the X and Y coordinates (compared to Z), but this difference is quite small and, to some extent, expected as Z is estimated at a later stage of the cascade. Finally, Fig.4 shows a few fitting results produced by our system. 4 Conclusions In this paper, we proposed a two-stage CNN cascade for 3D face alignment. The method is based on the idea of splitting the 3D alignment task into two separate subtasks: 2D landmark estimation and 1D (depth) estimation, where the first one guides the second. Our system secured the first place in the 1st 3D Face Alignment in the Wild (3DFAW) Challenge.
7 Title Suppressed Due to Excessive Length 7 a) xy. b) xyz. c) x. d) y. e) z. Fig. 3: GTE vs fraction of test images on the 3DFAW validation set, on (X,Y), (X,Y,Z), X alone, Y alone and Z alone. Table 3: Performance on the 3DFAW validation set, on (X,Y), (X,Y,Z), X alone, Y alone and Z alone. Axes GTE (%) xy xyz x 2.12 y 2.48 z Acknowledgment This work was supported in part by the EPSRC project EP/M02153X/1 Facial Deformable Models of Animals.

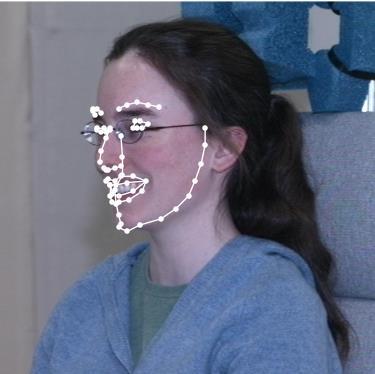
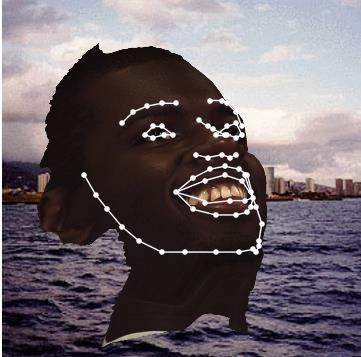
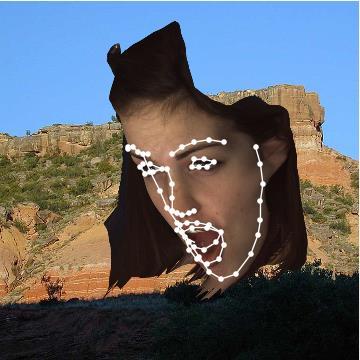
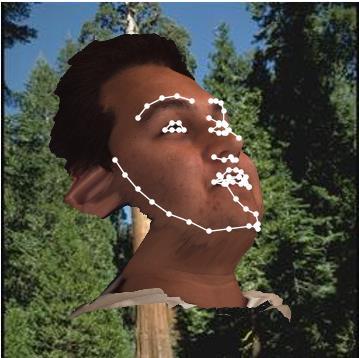

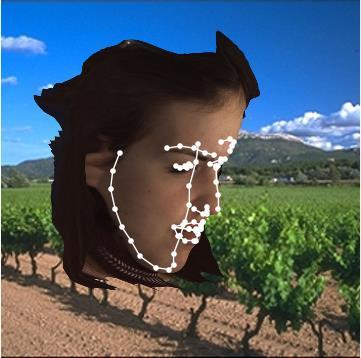
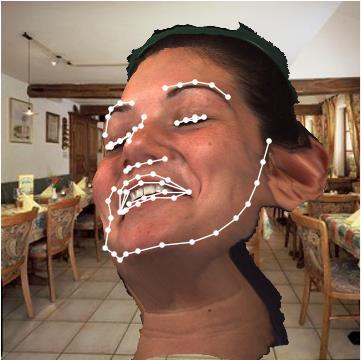
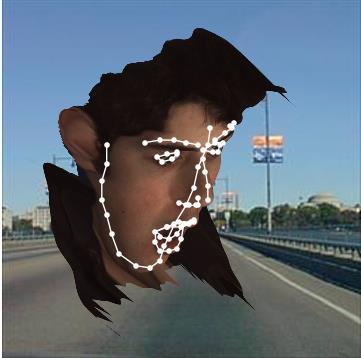

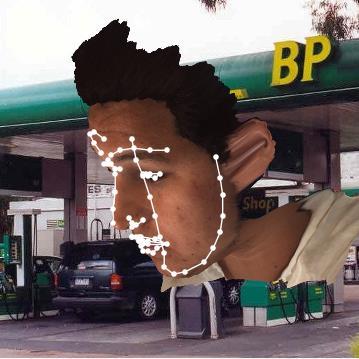

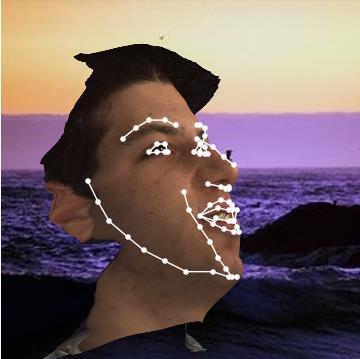

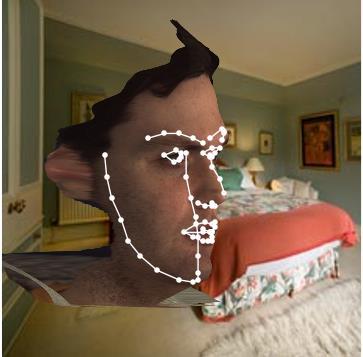
8 8 Adrian Bulat, Georgios Tzimiropoulos Fig. 4: Fitting results produced by our system on the 3DFAW test set. Observe that our method copes well with a large variety of poses and facial expressions on both controlled and in-the-wild images. Best viewed in colour..
9 Title Suppressed Due to Excessive Length 9 References 1. Bulat, A., Tzimiropoulos, G.: Human pose estimation via convolutional part heatmap regression. In: ECCV. (2016) 2. Cao, X., Wei, Y., Wen, F., Sun, J.: Face alignment by explicit shape regression. In: CVPR. (2012) 3. Xiong, X., De la Torre, F.: Supervised descent method and its applications to face alignment. In: CVPR. (2013) Sagonas, C., Tzimiropoulos, G., Zafeiriou, S., Pantic, M.: A semi-automatic methodology for facial landmark annotation. In: CVPR-W. (2013) 5. Sagonas, C., Tzimiropoulos, G., Zafeiriou, S., Pantic, M.: 300 faces in-the-wild challenge: The first facial landmark localization challenge. In: CVPR. (2013) Shen, J., Zafeiriou, S., Chrysos, G., Kossaifi, J., Tzimiropoulos, G., Pantic, M.: The first facial landmark tracking in-the-wild challenge: Benchmark and results. In: ICCV-W. (2015) 7. Jourabloo, A., Liu, X.: Pose-invariant 3d face alignment. In: CVPR. (2015) Jourabloo, A., Liu, X.: Large-pose face alignment via cnn-based dense 3d model fitting, CVPR (2016) 9. Zhu, S., Li, C., Change Loy, C., Tang, X.: Face alignment by coarse-to-fine shape searching. In: CVPR. (2015) Bulat, A., Tzimiropoulos, G.: Convolutional aggregation of local evidence for large pose face alignment. In: BMVC. (2016) 11. : 1st Workshop on 3D Face Alignment in the Wild (3DFAW) & Challenge. http: //mhug.disi.unitn.it/workshop/3dfaw/ Accessed: He, K., Zhang, X., Ren, S., Sun, J.: Deep residual learning for image recognition. arxiv preprint arxiv: (2015) 13. He, K., Zhang, X., Ren, S., Sun, J.: Identity mappings in deep residual networks. arxiv preprint arxiv: (2016) 14. Zeiler, M.D., Taylor, G.W., Fergus, R.: Adaptive deconvolutional networks for mid and high level feature learning. In: ICCV, IEEE (2011) Newell, A., Yang, K., Deng, J.: Stacked hourglass networks for human pose estimation. arxiv preprint arxiv: (2016) 16. Long, J., Shelhamer, E., Darrell, T.: Fully convolutional networks for semantic segmentation. In: CVPR. (2015) Deng, J., Dong, W., Socher, R., Li, L.J., Li, K., Fei-Fei, L.: Imagenet: A large-scale hierarchical image database. In: CVPR, IEEE (2009) Collobert, R., Kavukcuoglu, K., Farabet, C.: Torch7: A matlab-like environment for machine learning. In: NIPS-W. Number EPFL-CONF (2011) 19. Gross, R., Matthews, I., Cohn, J., Kanade, T., Baker, S.: Multi-pie. Image and Vision Computing 28(5) (2010) Yin, L., Chen, X., Sun, Y., Worm, T., Reale, M.: A high-resolution 3d dynamic facial expression database. In: Automatic Face & Gesture Recognition, FG 08. 8th IEEE International Conference On, IEEE (2008) Zhang, X., Yin, L., Cohn, J.F., Canavan, S., Reale, M., Horowitz, A., Liu, P., Girard, J.M.: Bp4d-spontaneous: a high-resolution spontaneous 3d dynamic facial expression database. Image and Vision Computing 32(10) (2014) Jeni, L.A., Cohn, J.F., Kanade, T.: Dense 3d face alignment from 2d video for real-time use. Image and Vision Computing (2016)
arxiv: v1 [cs.cv] 16 Nov 2015
![arxiv: v1 [cs.cv] 16 Nov 2015](/thumbs/85/92600288.jpg "arxiv: v1 [cs.cv] 16 Nov 2015") Coarse-to-fine Face Alignment with Multi-Scale Local Patch Regression Zhiao Huang hza@megvii.com Erjin Zhou zej@megvii.com Zhimin Cao czm@megvii.com arxiv:1511.04901v1 [cs.cv] 16 Nov 2015 Abstract Facial
Coarse-to-fine Face Alignment with Multi-Scale Local Patch Regression Zhiao Huang hza@megvii.com Erjin Zhou zej@megvii.com Zhimin Cao czm@megvii.com arxiv:1511.04901v1 [cs.cv] 16 Nov 2015 Abstract Facial
arxiv:submit/ [cs.cv] 7 Sep 2017
![arxiv:submit/ [cs.cv] 7 Sep 2017](/thumbs/82/85530844.jpg "arxiv:submit/ [cs.cv] 7 Sep 2017") How far are we from solving the 2D & 3D Face Alignment problem? (and a dataset of 230,000 3D facial landmarks) arxiv:submit/2000193 [cs.cv] 7 Sep 2017 Adrian Bulat and Georgios Tzimiropoulos Computer Vision
How far are we from solving the 2D & 3D Face Alignment problem? (and a dataset of 230,000 3D facial landmarks) arxiv:submit/2000193 [cs.cv] 7 Sep 2017 Adrian Bulat and Georgios Tzimiropoulos Computer Vision
How far are we from solving the 2D & 3D Face Alignment problem? (and a dataset of 230,000 3D facial landmarks)
") How far are we from solving the 2D & 3D Face Alignment problem? (and a dataset of 230,000 3D facial landmarks) Adrian Bulat and Georgios Tzimiropoulos Computer Vision Laboratory, The University of Nottingham
How far are we from solving the 2D & 3D Face Alignment problem? (and a dataset of 230,000 3D facial landmarks) Adrian Bulat and Georgios Tzimiropoulos Computer Vision Laboratory, The University of Nottingham
Lecture 7: Semantic Segmentation
 Semantic Segmentation CSED703R: Deep Learning for Visual Recognition (207F) Segmenting images based on its semantic notion Lecture 7: Semantic Segmentation Bohyung Han Computer Vision Lab. bhhanpostech.ac.kr
Semantic Segmentation CSED703R: Deep Learning for Visual Recognition (207F) Segmenting images based on its semantic notion Lecture 7: Semantic Segmentation Bohyung Han Computer Vision Lab. bhhanpostech.ac.kr
Robust FEC-CNN: A High Accuracy Facial Landmark Detection System
 Robust FEC-CNN: A High Accuracy Facial Landmark Detection System Zhenliang He 1,2 Jie Zhang 1,2 Meina Kan 1,3 Shiguang Shan 1,3 Xilin Chen 1 1 Key Lab of Intelligent Information Processing of Chinese Academy
Robust FEC-CNN: A High Accuracy Facial Landmark Detection System Zhenliang He 1,2 Jie Zhang 1,2 Meina Kan 1,3 Shiguang Shan 1,3 Xilin Chen 1 1 Key Lab of Intelligent Information Processing of Chinese Academy
A FRAMEWORK OF EXTRACTING MULTI-SCALE FEATURES USING MULTIPLE CONVOLUTIONAL NEURAL NETWORKS. Kuan-Chuan Peng and Tsuhan Chen
 A FRAMEWORK OF EXTRACTING MULTI-SCALE FEATURES USING MULTIPLE CONVOLUTIONAL NEURAL NETWORKS Kuan-Chuan Peng and Tsuhan Chen School of Electrical and Computer Engineering, Cornell University, Ithaca, NY
A FRAMEWORK OF EXTRACTING MULTI-SCALE FEATURES USING MULTIPLE CONVOLUTIONAL NEURAL NETWORKS Kuan-Chuan Peng and Tsuhan Chen School of Electrical and Computer Engineering, Cornell University, Ithaca, NY
Intensity-Depth Face Alignment Using Cascade Shape Regression
 Intensity-Depth Face Alignment Using Cascade Shape Regression Yang Cao 1 and Bao-Liang Lu 1,2 1 Center for Brain-like Computing and Machine Intelligence Department of Computer Science and Engineering Shanghai
Intensity-Depth Face Alignment Using Cascade Shape Regression Yang Cao 1 and Bao-Liang Lu 1,2 1 Center for Brain-like Computing and Machine Intelligence Department of Computer Science and Engineering Shanghai
Channel Locality Block: A Variant of Squeeze-and-Excitation
 Channel Locality Block: A Variant of Squeeze-and-Excitation 1 st Huayu Li Northern Arizona University Flagstaff, United State Northern Arizona University hl459@nau.edu arxiv:1901.01493v1 [cs.lg] 6 Jan
Channel Locality Block: A Variant of Squeeze-and-Excitation 1 st Huayu Li Northern Arizona University Flagstaff, United State Northern Arizona University hl459@nau.edu arxiv:1901.01493v1 [cs.lg] 6 Jan
FACIAL POINT DETECTION BASED ON A CONVOLUTIONAL NEURAL NETWORK WITH OPTIMAL MINI-BATCH PROCEDURE. Chubu University 1200, Matsumoto-cho, Kasugai, AICHI
 FACIAL POINT DETECTION BASED ON A CONVOLUTIONAL NEURAL NETWORK WITH OPTIMAL MINI-BATCH PROCEDURE Masatoshi Kimura Takayoshi Yamashita Yu Yamauchi Hironobu Fuyoshi* Chubu University 1200, Matsumoto-cho,
FACIAL POINT DETECTION BASED ON A CONVOLUTIONAL NEURAL NETWORK WITH OPTIMAL MINI-BATCH PROCEDURE Masatoshi Kimura Takayoshi Yamashita Yu Yamauchi Hironobu Fuyoshi* Chubu University 1200, Matsumoto-cho,
arxiv: v1 [cs.cv] 31 Mar 2017
![arxiv: v1 [cs.cv] 31 Mar 2017](/thumbs/80/81467687.jpg "arxiv: v1 [cs.cv] 31 Mar 2017") End-to-End Spatial Transform Face Detection and Recognition Liying Chi Zhejiang University charrin0531@gmail.com Hongxin Zhang Zhejiang University zhx@cad.zju.edu.cn Mingxiu Chen Rokid.inc cmxnono@rokid.com
End-to-End Spatial Transform Face Detection and Recognition Liying Chi Zhejiang University charrin0531@gmail.com Hongxin Zhang Zhejiang University zhx@cad.zju.edu.cn Mingxiu Chen Rokid.inc cmxnono@rokid.com
Deep learning for dense per-pixel prediction. Chunhua Shen The University of Adelaide, Australia
 Deep learning for dense per-pixel prediction Chunhua Shen The University of Adelaide, Australia Image understanding Classification error Convolution Neural Networks 0.3 0.2 0.1 Image Classification [Krizhevsky
Deep learning for dense per-pixel prediction Chunhua Shen The University of Adelaide, Australia Image understanding Classification error Convolution Neural Networks 0.3 0.2 0.1 Image Classification [Krizhevsky
Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks
 Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks Shaoqing Ren, Kaiming He, Ross Girshick, and Jian Sun Presented by Tushar Bansal Objective 1. Get bounding box for all objects
Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks Shaoqing Ren, Kaiming He, Ross Girshick, and Jian Sun Presented by Tushar Bansal Objective 1. Get bounding box for all objects
The First 3D Face Alignment in the Wild (3DFAW) Challenge
 Challenge") The First 3D Face Alignment in the Wild (3DFAW) Challenge László A. Jeni 1, Sergey Tulyakov 2, Lijun Yin 3, Nicu Sebe 2, and Jeffrey F. Cohn 1,4 1 Robotics Institute, Carnegie Mellon University, Pittsburgh,
The First 3D Face Alignment in the Wild (3DFAW) Challenge László A. Jeni 1, Sergey Tulyakov 2, Lijun Yin 3, Nicu Sebe 2, and Jeffrey F. Cohn 1,4 1 Robotics Institute, Carnegie Mellon University, Pittsburgh,
Shape Augmented Regression for 3D Face Alignment
 Shape Augmented Regression for 3D Face Alignment Chao Gou 1,3(B),YueWu 2, Fei-Yue Wang 1,3, and Qiang Ji 2 1 Institute of Automation, Chinese Academy of Sciences, Beijing, China {gouchao2012,feiyue.wang}@ia.ac.cn
Shape Augmented Regression for 3D Face Alignment Chao Gou 1,3(B),YueWu 2, Fei-Yue Wang 1,3, and Qiang Ji 2 1 Institute of Automation, Chinese Academy of Sciences, Beijing, China {gouchao2012,feiyue.wang}@ia.ac.cn
Improved Face Detection and Alignment using Cascade Deep Convolutional Network
 Improved Face Detection and Alignment using Cascade Deep Convolutional Network Weilin Cong, Sanyuan Zhao, Hui Tian, and Jianbing Shen Beijing Key Laboratory of Intelligent Information Technology, School
Improved Face Detection and Alignment using Cascade Deep Convolutional Network Weilin Cong, Sanyuan Zhao, Hui Tian, and Jianbing Shen Beijing Key Laboratory of Intelligent Information Technology, School
Cascade Region Regression for Robust Object Detection
 Large Scale Visual Recognition Challenge 2015 (ILSVRC2015) Cascade Region Regression for Robust Object Detection Jiankang Deng, Shaoli Huang, Jing Yang, Hui Shuai, Zhengbo Yu, Zongguang Lu, Qiang Ma, Yali
Large Scale Visual Recognition Challenge 2015 (ILSVRC2015) Cascade Region Regression for Robust Object Detection Jiankang Deng, Shaoli Huang, Jing Yang, Hui Shuai, Zhengbo Yu, Zongguang Lu, Qiang Ma, Yali
FACIAL POINT DETECTION USING CONVOLUTIONAL NEURAL NETWORK TRANSFERRED FROM A HETEROGENEOUS TASK
 FACIAL POINT DETECTION USING CONVOLUTIONAL NEURAL NETWORK TRANSFERRED FROM A HETEROGENEOUS TASK Takayoshi Yamashita* Taro Watasue** Yuji Yamauchi* Hironobu Fujiyoshi* *Chubu University, **Tome R&D 1200,
FACIAL POINT DETECTION USING CONVOLUTIONAL NEURAL NETWORK TRANSFERRED FROM A HETEROGENEOUS TASK Takayoshi Yamashita* Taro Watasue** Yuji Yamauchi* Hironobu Fujiyoshi* *Chubu University, **Tome R&D 1200,
Mask R-CNN. presented by Jiageng Zhang, Jingyao Zhan, Yunhan Ma
 Mask R-CNN presented by Jiageng Zhang, Jingyao Zhan, Yunhan Ma Mask R-CNN Background Related Work Architecture Experiment Mask R-CNN Background Related Work Architecture Experiment Background From left
Mask R-CNN presented by Jiageng Zhang, Jingyao Zhan, Yunhan Ma Mask R-CNN Background Related Work Architecture Experiment Mask R-CNN Background Related Work Architecture Experiment Background From left
SSD: Single Shot MultiBox Detector. Author: Wei Liu et al. Presenter: Siyu Jiang
 SSD: Single Shot MultiBox Detector Author: Wei Liu et al. Presenter: Siyu Jiang Outline 1. Motivations 2. Contributions 3. Methodology 4. Experiments 5. Conclusions 6. Extensions Motivation Motivation
SSD: Single Shot MultiBox Detector Author: Wei Liu et al. Presenter: Siyu Jiang Outline 1. Motivations 2. Contributions 3. Methodology 4. Experiments 5. Conclusions 6. Extensions Motivation Motivation
Finding Tiny Faces Supplementary Materials
 Finding Tiny Faces Supplementary Materials Peiyun Hu, Deva Ramanan Robotics Institute Carnegie Mellon University {peiyunh,deva}@cs.cmu.edu 1. Error analysis Quantitative analysis We plot the distribution
Finding Tiny Faces Supplementary Materials Peiyun Hu, Deva Ramanan Robotics Institute Carnegie Mellon University {peiyunh,deva}@cs.cmu.edu 1. Error analysis Quantitative analysis We plot the distribution
Fully Convolutional Networks for Semantic Segmentation
 Fully Convolutional Networks for Semantic Segmentation Jonathan Long* Evan Shelhamer* Trevor Darrell UC Berkeley Chaim Ginzburg for Deep Learning seminar 1 Semantic Segmentation Define a pixel-wise labeling
Fully Convolutional Networks for Semantic Segmentation Jonathan Long* Evan Shelhamer* Trevor Darrell UC Berkeley Chaim Ginzburg for Deep Learning seminar 1 Semantic Segmentation Define a pixel-wise labeling
Combining Local and Global Features for 3D Face Tracking
 Combining Local and Global Features for 3D Face Tracking Pengfei Xiong, Guoqing Li, Yuhang Sun Megvii (face++) Research {xiongpengfei, liguoqing, sunyuhang}@megvii.com Abstract In this paper, we propose
Combining Local and Global Features for 3D Face Tracking Pengfei Xiong, Guoqing Li, Yuhang Sun Megvii (face++) Research {xiongpengfei, liguoqing, sunyuhang}@megvii.com Abstract In this paper, we propose
Structured Prediction using Convolutional Neural Networks
 Overview Structured Prediction using Convolutional Neural Networks Bohyung Han bhhan@postech.ac.kr Computer Vision Lab. Convolutional Neural Networks (CNNs) Structured predictions for low level computer
Overview Structured Prediction using Convolutional Neural Networks Bohyung Han bhhan@postech.ac.kr Computer Vision Lab. Convolutional Neural Networks (CNNs) Structured predictions for low level computer
Computer Vision Lecture 16
 Announcements Computer Vision Lecture 16 Deep Learning Applications 11.01.2017 Seminar registration period starts on Friday We will offer a lab course in the summer semester Deep Robot Learning Topic:
Announcements Computer Vision Lecture 16 Deep Learning Applications 11.01.2017 Seminar registration period starts on Friday We will offer a lab course in the summer semester Deep Robot Learning Topic:
arxiv: v1 [cs.cv] 31 Mar 2016
![arxiv: v1 [cs.cv] 31 Mar 2016](/thumbs/92/108399479.jpg "arxiv: v1 [cs.cv] 31 Mar 2016") Object Boundary Guided Semantic Segmentation Qin Huang, Chunyang Xia, Wenchao Zheng, Yuhang Song, Hao Xu and C.-C. Jay Kuo arxiv:1603.09742v1 [cs.cv] 31 Mar 2016 University of Southern California Abstract.
Object Boundary Guided Semantic Segmentation Qin Huang, Chunyang Xia, Wenchao Zheng, Yuhang Song, Hao Xu and C.-C. Jay Kuo arxiv:1603.09742v1 [cs.cv] 31 Mar 2016 University of Southern California Abstract.
arxiv: v1 [cs.cv] 20 Dec 2016
![arxiv: v1 [cs.cv] 20 Dec 2016](/thumbs/73/68905842.jpg "arxiv: v1 [cs.cv] 20 Dec 2016") End-to-End Pedestrian Collision Warning System based on a Convolutional Neural Network with Semantic Segmentation arxiv:1612.06558v1 [cs.cv] 20 Dec 2016 Heechul Jung heechul@dgist.ac.kr Min-Kook Choi mkchoi@dgist.ac.kr
End-to-End Pedestrian Collision Warning System based on a Convolutional Neural Network with Semantic Segmentation arxiv:1612.06558v1 [cs.cv] 20 Dec 2016 Heechul Jung heechul@dgist.ac.kr Min-Kook Choi mkchoi@dgist.ac.kr
A Fully End-to-End Cascaded CNN for Facial Landmark Detection
 2017 IEEE 12th International Conference on Automatic Face & Gesture Recognition A Fully End-to-End Cascaded CNN for Facial Landmark Detection Zhenliang He 1,2 Meina Kan 1,3 Jie Zhang 1,2 Xilin Chen 1 Shiguang
2017 IEEE 12th International Conference on Automatic Face & Gesture Recognition A Fully End-to-End Cascaded CNN for Facial Landmark Detection Zhenliang He 1,2 Meina Kan 1,3 Jie Zhang 1,2 Xilin Chen 1 Shiguang
Computer Vision Lecture 16
 Computer Vision Lecture 16 Deep Learning Applications 11.01.2017 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar registration period starts
Computer Vision Lecture 16 Deep Learning Applications 11.01.2017 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar registration period starts
Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks
 Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks Si Chen The George Washington University sichen@gwmail.gwu.edu Meera Hahn Emory University mhahn7@emory.edu Mentor: Afshin
Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks Si Chen The George Washington University sichen@gwmail.gwu.edu Meera Hahn Emory University mhahn7@emory.edu Mentor: Afshin
Cost-alleviative Learning for Deep Convolutional Neural Network-based Facial Part Labeling
 [DOI: 10.2197/ipsjtcva.7.99] Express Paper Cost-alleviative Learning for Deep Convolutional Neural Network-based Facial Part Labeling Takayoshi Yamashita 1,a) Takaya Nakamura 1 Hiroshi Fukui 1,b) Yuji
[DOI: 10.2197/ipsjtcva.7.99] Express Paper Cost-alleviative Learning for Deep Convolutional Neural Network-based Facial Part Labeling Takayoshi Yamashita 1,a) Takaya Nakamura 1 Hiroshi Fukui 1,b) Yuji
Learning Spatio-Temporal Features with 3D Residual Networks for Action Recognition
 Learning Spatio-Temporal Features with 3D Residual Networks for Action Recognition Kensho Hara, Hirokatsu Kataoka, Yutaka Satoh National Institute of Advanced Industrial Science and Technology (AIST) Tsukuba,
Learning Spatio-Temporal Features with 3D Residual Networks for Action Recognition Kensho Hara, Hirokatsu Kataoka, Yutaka Satoh National Institute of Advanced Industrial Science and Technology (AIST) Tsukuba,
HENet: A Highly Efficient Convolutional Neural. Networks Optimized for Accuracy, Speed and Storage
 HENet: A Highly Efficient Convolutional Neural Networks Optimized for Accuracy, Speed and Storage Qiuyu Zhu Shanghai University zhuqiuyu@staff.shu.edu.cn Ruixin Zhang Shanghai University chriszhang96@shu.edu.cn
HENet: A Highly Efficient Convolutional Neural Networks Optimized for Accuracy, Speed and Storage Qiuyu Zhu Shanghai University zhuqiuyu@staff.shu.edu.cn Ruixin Zhang Shanghai University chriszhang96@shu.edu.cn
Unconstrained Face Alignment without Face Detection
 Unconstrained Face Alignment without Face Detection Xiaohu Shao 1,2, Junliang Xing 3, Jiangjing Lv 1,2, Chunlin Xiao 4, Pengcheng Liu 1, Youji Feng 1, Cheng Cheng 1 1 Chongqing Institute of Green and Intelligent
Unconstrained Face Alignment without Face Detection Xiaohu Shao 1,2, Junliang Xing 3, Jiangjing Lv 1,2, Chunlin Xiao 4, Pengcheng Liu 1, Youji Feng 1, Cheng Cheng 1 1 Chongqing Institute of Green and Intelligent
Encoder-Decoder Networks for Semantic Segmentation. Sachin Mehta
 Encoder-Decoder Networks for Semantic Segmentation Sachin Mehta Outline > Overview of Semantic Segmentation > Encoder-Decoder Networks > Results What is Semantic Segmentation? Input: RGB Image Output:
Encoder-Decoder Networks for Semantic Segmentation Sachin Mehta Outline > Overview of Semantic Segmentation > Encoder-Decoder Networks > Results What is Semantic Segmentation? Input: RGB Image Output:
MoFA: Model-based Deep Convolutional Face Autoencoder for Unsupervised Monocular Reconstruction
 MoFA: Model-based Deep Convolutional Face Autoencoder for Unsupervised Monocular Reconstruction Ayush Tewari Michael Zollhofer Hyeongwoo Kim Pablo Garrido Florian Bernard Patrick Perez Christian Theobalt
MoFA: Model-based Deep Convolutional Face Autoencoder for Unsupervised Monocular Reconstruction Ayush Tewari Michael Zollhofer Hyeongwoo Kim Pablo Garrido Florian Bernard Patrick Perez Christian Theobalt
An Exploration of Computer Vision Techniques for Bird Species Classification
 An Exploration of Computer Vision Techniques for Bird Species Classification Anne L. Alter, Karen M. Wang December 15, 2017 Abstract Bird classification, a fine-grained categorization task, is a complex
An Exploration of Computer Vision Techniques for Bird Species Classification Anne L. Alter, Karen M. Wang December 15, 2017 Abstract Bird classification, a fine-grained categorization task, is a complex
THIS work is on localizing a predefined set of fiducial
 JOURNAL OF L A T E X LASS FILES, VOL. 14, NO. 8, AUGUST 2015 1 Hierarchical binary NNs for landmark localization with limited resources Adrian Bulat and Georgios Tzimiropoulos Abstract Our goal is to design
JOURNAL OF L A T E X LASS FILES, VOL. 14, NO. 8, AUGUST 2015 1 Hierarchical binary NNs for landmark localization with limited resources Adrian Bulat and Georgios Tzimiropoulos Abstract Our goal is to design
Part Localization by Exploiting Deep Convolutional Networks
 Part Localization by Exploiting Deep Convolutional Networks Marcel Simon, Erik Rodner, and Joachim Denzler Computer Vision Group, Friedrich Schiller University of Jena, Germany www.inf-cv.uni-jena.de Abstract.
Part Localization by Exploiting Deep Convolutional Networks Marcel Simon, Erik Rodner, and Joachim Denzler Computer Vision Group, Friedrich Schiller University of Jena, Germany www.inf-cv.uni-jena.de Abstract.
arxiv: v5 [cs.cv] 13 Apr 2018
![arxiv: v5 [cs.cv] 13 Apr 2018](/thumbs/88/115578479.jpg "arxiv: v5 [cs.cv] 13 Apr 2018") Fine-Grained Head Pose Estimation Without Keypoints Nataniel Ruiz Eunji Chong James M. Rehg Georgia Institute of Technology {nataniel.ruiz, eunjichong, rehg}@gatech.edu arxiv:1710.00925v5 [cs.cv] 13 Apr
Fine-Grained Head Pose Estimation Without Keypoints Nataniel Ruiz Eunji Chong James M. Rehg Georgia Institute of Technology {nataniel.ruiz, eunjichong, rehg}@gatech.edu arxiv:1710.00925v5 [cs.cv] 13 Apr
Deconvolutions in Convolutional Neural Networks
 Overview Deconvolutions in Convolutional Neural Networks Bohyung Han bhhan@postech.ac.kr Computer Vision Lab. Convolutional Neural Networks (CNNs) Deconvolutions in CNNs Applications Network visualization
Overview Deconvolutions in Convolutional Neural Networks Bohyung Han bhhan@postech.ac.kr Computer Vision Lab. Convolutional Neural Networks (CNNs) Deconvolutions in CNNs Applications Network visualization
Object Detection Based on Deep Learning
 Object Detection Based on Deep Learning Yurii Pashchenko AI Ukraine 2016, Kharkiv, 2016 Image classification (mostly what you ve seen) http://tutorial.caffe.berkeleyvision.org/caffe-cvpr15-detection.pdf
Object Detection Based on Deep Learning Yurii Pashchenko AI Ukraine 2016, Kharkiv, 2016 Image classification (mostly what you ve seen) http://tutorial.caffe.berkeleyvision.org/caffe-cvpr15-detection.pdf
RSRN: Rich Side-output Residual Network for Medial Axis Detection
 RSRN: Rich Side-output Residual Network for Medial Axis Detection Chang Liu, Wei Ke, Jianbin Jiao, and Qixiang Ye University of Chinese Academy of Sciences, Beijing, China {liuchang615, kewei11}@mails.ucas.ac.cn,
RSRN: Rich Side-output Residual Network for Medial Axis Detection Chang Liu, Wei Ke, Jianbin Jiao, and Qixiang Ye University of Chinese Academy of Sciences, Beijing, China {liuchang615, kewei11}@mails.ucas.ac.cn,
CEA LIST s participation to the Scalable Concept Image Annotation task of ImageCLEF 2015
 CEA LIST s participation to the Scalable Concept Image Annotation task of ImageCLEF 2015 Etienne Gadeski, Hervé Le Borgne, and Adrian Popescu CEA, LIST, Laboratory of Vision and Content Engineering, France
CEA LIST s participation to the Scalable Concept Image Annotation task of ImageCLEF 2015 Etienne Gadeski, Hervé Le Borgne, and Adrian Popescu CEA, LIST, Laboratory of Vision and Content Engineering, France
Human Pose Estimation with Deep Learning. Wei Yang
 Human Pose Estimation with Deep Learning Wei Yang Applications Understand Activities Family Robots American Heist (2014) - The Bank Robbery Scene 2 What do we need to know to recognize a crime scene? 3
Human Pose Estimation with Deep Learning Wei Yang Applications Understand Activities Family Robots American Heist (2014) - The Bank Robbery Scene 2 What do we need to know to recognize a crime scene? 3
Content-Based Image Recovery
 Content-Based Image Recovery Hong-Yu Zhou and Jianxin Wu National Key Laboratory for Novel Software Technology Nanjing University, China zhouhy@lamda.nju.edu.cn wujx2001@nju.edu.cn Abstract. We propose
Content-Based Image Recovery Hong-Yu Zhou and Jianxin Wu National Key Laboratory for Novel Software Technology Nanjing University, China zhouhy@lamda.nju.edu.cn wujx2001@nju.edu.cn Abstract. We propose
Learning to Estimate 3D Human Pose and Shape from a Single Color Image Supplementary material
 Learning to Estimate 3D Human Pose and Shape from a Single Color Image Supplementary material Georgios Pavlakos 1, Luyang Zhu 2, Xiaowei Zhou 3, Kostas Daniilidis 1 1 University of Pennsylvania 2 Peking
Learning to Estimate 3D Human Pose and Shape from a Single Color Image Supplementary material Georgios Pavlakos 1, Luyang Zhu 2, Xiaowei Zhou 3, Kostas Daniilidis 1 1 University of Pennsylvania 2 Peking
One Network to Solve Them All Solving Linear Inverse Problems using Deep Projection Models
 One Network to Solve Them All Solving Linear Inverse Problems using Deep Projection Models [Supplemental Materials] 1. Network Architecture b ref b ref +1 We now describe the architecture of the networks
One Network to Solve Them All Solving Linear Inverse Problems using Deep Projection Models [Supplemental Materials] 1. Network Architecture b ref b ref +1 We now describe the architecture of the networks
Convolutional Neural Networks. Computer Vision Jia-Bin Huang, Virginia Tech
 Convolutional Neural Networks Computer Vision Jia-Bin Huang, Virginia Tech Today s class Overview Convolutional Neural Network (CNN) Training CNN Understanding and Visualizing CNN Image Categorization:
Convolutional Neural Networks Computer Vision Jia-Bin Huang, Virginia Tech Today s class Overview Convolutional Neural Network (CNN) Training CNN Understanding and Visualizing CNN Image Categorization:
Depth from Stereo. Dominic Cheng February 7, 2018
 Depth from Stereo Dominic Cheng February 7, 2018 Agenda 1. Introduction to stereo 2. Efficient Deep Learning for Stereo Matching (W. Luo, A. Schwing, and R. Urtasun. In CVPR 2016.) 3. Cascade Residual
Depth from Stereo Dominic Cheng February 7, 2018 Agenda 1. Introduction to stereo 2. Efficient Deep Learning for Stereo Matching (W. Luo, A. Schwing, and R. Urtasun. In CVPR 2016.) 3. Cascade Residual
Spatial Localization and Detection. Lecture 8-1
 Lecture 8: Spatial Localization and Detection Lecture 8-1 Administrative - Project Proposals were due on Saturday Homework 2 due Friday 2/5 Homework 1 grades out this week Midterm will be in-class on Wednesday
Lecture 8: Spatial Localization and Detection Lecture 8-1 Administrative - Project Proposals were due on Saturday Homework 2 due Friday 2/5 Homework 1 grades out this week Midterm will be in-class on Wednesday
3 Object Detection. BVM 2018 Tutorial: Advanced Deep Learning Methods. Paul F. Jaeger, Division of Medical Image Computing
 3 Object Detection BVM 2018 Tutorial: Advanced Deep Learning Methods Paul F. Jaeger, of Medical Image Computing What is object detection? classification segmentation obj. detection (1 label per pixel)
3 Object Detection BVM 2018 Tutorial: Advanced Deep Learning Methods Paul F. Jaeger, of Medical Image Computing What is object detection? classification segmentation obj. detection (1 label per pixel)
Deep Learning. Visualizing and Understanding Convolutional Networks. Christopher Funk. Pennsylvania State University.
 Visualizing and Understanding Convolutional Networks Christopher Pennsylvania State University February 23, 2015 Some Slide Information taken from Pierre Sermanet (Google) presentation on and Computer
Visualizing and Understanding Convolutional Networks Christopher Pennsylvania State University February 23, 2015 Some Slide Information taken from Pierre Sermanet (Google) presentation on and Computer
The Nottingham eprints service makes this work by researchers of the University of Nottingham available open access under the following conditions.
 Sagonas, Christos and Tzimiropoulos, Georgios and Zafeiriou, Stefanos and Pantic, Maja (2013) 300 Faces in-the-wild Challenge: the first facial landmark localization challenge. In: 2013 IEEE International
Sagonas, Christos and Tzimiropoulos, Georgios and Zafeiriou, Stefanos and Pantic, Maja (2013) 300 Faces in-the-wild Challenge: the first facial landmark localization challenge. In: 2013 IEEE International
Places Challenge 2017
 Places Challenge 2017 Scene Parsing Task CASIA_IVA_JD Jun Fu, Jing Liu, Longteng Guo, Haijie Tian, Fei Liu, Hanqing Lu Yong Li, Yongjun Bao, Weipeng Yan National Laboratory of Pattern Recognition, Institute
Places Challenge 2017 Scene Parsing Task CASIA_IVA_JD Jun Fu, Jing Liu, Longteng Guo, Haijie Tian, Fei Liu, Hanqing Lu Yong Li, Yongjun Bao, Weipeng Yan National Laboratory of Pattern Recognition, Institute
Supplementary Material: Unsupervised Domain Adaptation for Face Recognition in Unlabeled Videos
 Supplementary Material: Unsupervised Domain Adaptation for Face Recognition in Unlabeled Videos Kihyuk Sohn 1 Sifei Liu 2 Guangyu Zhong 3 Xiang Yu 1 Ming-Hsuan Yang 2 Manmohan Chandraker 1,4 1 NEC Labs
Supplementary Material: Unsupervised Domain Adaptation for Face Recognition in Unlabeled Videos Kihyuk Sohn 1 Sifei Liu 2 Guangyu Zhong 3 Xiang Yu 1 Ming-Hsuan Yang 2 Manmohan Chandraker 1,4 1 NEC Labs
Predicting Depth, Surface Normals and Semantic Labels with a Common Multi-Scale Convolutional Architecture David Eigen, Rob Fergus
 Predicting Depth, Surface Normals and Semantic Labels with a Common Multi-Scale Convolutional Architecture David Eigen, Rob Fergus Presented by: Rex Ying and Charles Qi Input: A Single RGB Image Estimate
Predicting Depth, Surface Normals and Semantic Labels with a Common Multi-Scale Convolutional Architecture David Eigen, Rob Fergus Presented by: Rex Ying and Charles Qi Input: A Single RGB Image Estimate
Regionlet Object Detector with Hand-crafted and CNN Feature
 Regionlet Object Detector with Hand-crafted and CNN Feature Xiaoyu Wang Research Xiaoyu Wang Research Ming Yang Horizon Robotics Shenghuo Zhu Alibaba Group Yuanqing Lin Baidu Overview of this section Regionlet
Regionlet Object Detector with Hand-crafted and CNN Feature Xiaoyu Wang Research Xiaoyu Wang Research Ming Yang Horizon Robotics Shenghuo Zhu Alibaba Group Yuanqing Lin Baidu Overview of this section Regionlet
arxiv: v2 [cs.cv] 2 Apr 2018
![arxiv: v2 [cs.cv] 2 Apr 2018](/thumbs/91/106374014.jpg "arxiv: v2 [cs.cv] 2 Apr 2018") Depth of 3D CNNs Depth of 2D CNNs Can Spatiotemporal 3D CNNs Retrace the History of 2D CNNs and ImageNet? arxiv:1711.09577v2 [cs.cv] 2 Apr 2018 Kensho Hara, Hirokatsu Kataoka, Yutaka Satoh National Institute
Depth of 3D CNNs Depth of 2D CNNs Can Spatiotemporal 3D CNNs Retrace the History of 2D CNNs and ImageNet? arxiv:1711.09577v2 [cs.cv] 2 Apr 2018 Kensho Hara, Hirokatsu Kataoka, Yutaka Satoh National Institute
CIS680: Vision & Learning Assignment 2.b: RPN, Faster R-CNN and Mask R-CNN Due: Nov. 21, 2018 at 11:59 pm
 CIS680: Vision & Learning Assignment 2.b: RPN, Faster R-CNN and Mask R-CNN Due: Nov. 21, 2018 at 11:59 pm Instructions This is an individual assignment. Individual means each student must hand in their
CIS680: Vision & Learning Assignment 2.b: RPN, Faster R-CNN and Mask R-CNN Due: Nov. 21, 2018 at 11:59 pm Instructions This is an individual assignment. Individual means each student must hand in their
arxiv: v2 [cs.cv] 8 Sep 2017
![arxiv: v2 [cs.cv] 8 Sep 2017](/thumbs/73/69323728.jpg "arxiv: v2 [cs.cv] 8 Sep 2017") Large Pose 3D Face Reconstruction from a Single Image via Direct Volumetric CNN Regression Aaron S. Jackson 1 Adrian Bulat 1 Vasileios Argyriou 2 Georgios Tzimiropoulos 1 1 The University of Nottingham,
Large Pose 3D Face Reconstruction from a Single Image via Direct Volumetric CNN Regression Aaron S. Jackson 1 Adrian Bulat 1 Vasileios Argyriou 2 Georgios Tzimiropoulos 1 1 The University of Nottingham,
Martian lava field, NASA, Wikipedia
 Martian lava field, NASA, Wikipedia Old Man of the Mountain, Franconia, New Hampshire Pareidolia http://smrt.ccel.ca/203/2/6/pareidolia/ Reddit for more : ) https://www.reddit.com/r/pareidolia/top/ Pareidolia
Martian lava field, NASA, Wikipedia Old Man of the Mountain, Franconia, New Hampshire Pareidolia http://smrt.ccel.ca/203/2/6/pareidolia/ Reddit for more : ) https://www.reddit.com/r/pareidolia/top/ Pareidolia
Direct Multi-Scale Dual-Stream Network for Pedestrian Detection Sang-Il Jung and Ki-Sang Hong Image Information Processing Lab.
 [ICIP 2017] Direct Multi-Scale Dual-Stream Network for Pedestrian Detection Sang-Il Jung and Ki-Sang Hong Image Information Processing Lab., POSTECH Pedestrian Detection Goal To draw bounding boxes that
[ICIP 2017] Direct Multi-Scale Dual-Stream Network for Pedestrian Detection Sang-Il Jung and Ki-Sang Hong Image Information Processing Lab., POSTECH Pedestrian Detection Goal To draw bounding boxes that
arxiv: v1 [cs.cv] 14 Jul 2017
![arxiv: v1 [cs.cv] 14 Jul 2017](/thumbs/74/70463879.jpg "arxiv: v1 [cs.cv] 14 Jul 2017") Temporal Modeling Approaches for Large-scale Youtube-8M Video Understanding Fu Li, Chuang Gan, Xiao Liu, Yunlong Bian, Xiang Long, Yandong Li, Zhichao Li, Jie Zhou, Shilei Wen Baidu IDL & Tsinghua University
Temporal Modeling Approaches for Large-scale Youtube-8M Video Understanding Fu Li, Chuang Gan, Xiao Liu, Yunlong Bian, Xiang Long, Yandong Li, Zhichao Li, Jie Zhou, Shilei Wen Baidu IDL & Tsinghua University
3D Densely Convolutional Networks for Volumetric Segmentation. Toan Duc Bui, Jitae Shin, and Taesup Moon
 3D Densely Convolutional Networks for Volumetric Segmentation Toan Duc Bui, Jitae Shin, and Taesup Moon School of Electronic and Electrical Engineering, Sungkyunkwan University, Republic of Korea arxiv:1709.03199v2
3D Densely Convolutional Networks for Volumetric Segmentation Toan Duc Bui, Jitae Shin, and Taesup Moon School of Electronic and Electrical Engineering, Sungkyunkwan University, Republic of Korea arxiv:1709.03199v2
Robust Facial Landmark Detection under Significant Head Poses and Occlusion
 Robust Facial Landmark Detection under Significant Head Poses and Occlusion Yue Wu Qiang Ji ECSE Department, Rensselaer Polytechnic Institute 110 8th street, Troy, NY, USA {wuy9,jiq}@rpi.edu Abstract There
Robust Facial Landmark Detection under Significant Head Poses and Occlusion Yue Wu Qiang Ji ECSE Department, Rensselaer Polytechnic Institute 110 8th street, Troy, NY, USA {wuy9,jiq}@rpi.edu Abstract There
Deep Alignment Network: A convolutional neural network for robust face alignment
 Deep Alignment Network: A convolutional neural network for robust face alignment Marek Kowalski, Jacek Naruniec, and Tomasz Trzcinski Warsaw University of Technology m.kowalski@ire.pw.edu.pl, j.naruniec@ire.pw.edu.pl,
Deep Alignment Network: A convolutional neural network for robust face alignment Marek Kowalski, Jacek Naruniec, and Tomasz Trzcinski Warsaw University of Technology m.kowalski@ire.pw.edu.pl, j.naruniec@ire.pw.edu.pl,
arxiv: v2 [cs.cv] 23 May 2016
![arxiv: v2 [cs.cv] 23 May 2016](/thumbs/88/115196824.jpg "arxiv: v2 [cs.cv] 23 May 2016") Localizing by Describing: Attribute-Guided Attention Localization for Fine-Grained Recognition arxiv:1605.06217v2 [cs.cv] 23 May 2016 Xiao Liu Jiang Wang Shilei Wen Errui Ding Yuanqing Lin Baidu Research
Localizing by Describing: Attribute-Guided Attention Localization for Fine-Grained Recognition arxiv:1605.06217v2 [cs.cv] 23 May 2016 Xiao Liu Jiang Wang Shilei Wen Errui Ding Yuanqing Lin Baidu Research
arxiv: v1 [cs.cv] 26 Jul 2018
![arxiv: v1 [cs.cv] 26 Jul 2018](/thumbs/88/117269915.jpg "arxiv: v1 [cs.cv] 26 Jul 2018") A Better Baseline for AVA Rohit Girdhar João Carreira Carl Doersch Andrew Zisserman DeepMind Carnegie Mellon University University of Oxford arxiv:1807.10066v1 [cs.cv] 26 Jul 2018 Abstract We introduce
A Better Baseline for AVA Rohit Girdhar João Carreira Carl Doersch Andrew Zisserman DeepMind Carnegie Mellon University University of Oxford arxiv:1807.10066v1 [cs.cv] 26 Jul 2018 Abstract We introduce
Mask R-CNN. By Kaiming He, Georgia Gkioxari, Piotr Dollar and Ross Girshick Presented By Aditya Sanghi
 Mask R-CNN By Kaiming He, Georgia Gkioxari, Piotr Dollar and Ross Girshick Presented By Aditya Sanghi Types of Computer Vision Tasks http://cs231n.stanford.edu/ Semantic vs Instance Segmentation Image
Mask R-CNN By Kaiming He, Georgia Gkioxari, Piotr Dollar and Ross Girshick Presented By Aditya Sanghi Types of Computer Vision Tasks http://cs231n.stanford.edu/ Semantic vs Instance Segmentation Image
Team G-RMI: Google Research & Machine Intelligence
 Team G-RMI: Google Research & Machine Intelligence Alireza Fathi (alirezafathi@google.com) Nori Kanazawa, Kai Yang, George Papandreou, Tyler Zhu, Jonathan Huang, Vivek Rathod, Chen Sun, Kevin Murphy, et
Team G-RMI: Google Research & Machine Intelligence Alireza Fathi (alirezafathi@google.com) Nori Kanazawa, Kai Yang, George Papandreou, Tyler Zhu, Jonathan Huang, Vivek Rathod, Chen Sun, Kevin Murphy, et
Yiqi Yan. May 10, 2017
 Yiqi Yan May 10, 2017 P a r t I F u n d a m e n t a l B a c k g r o u n d s Convolution Single Filter Multiple Filters 3 Convolution: case study, 2 filters 4 Convolution: receptive field receptive field
Yiqi Yan May 10, 2017 P a r t I F u n d a m e n t a l B a c k g r o u n d s Convolution Single Filter Multiple Filters 3 Convolution: case study, 2 filters 4 Convolution: receptive field receptive field
JOINT DETECTION AND SEGMENTATION WITH DEEP HIERARCHICAL NETWORKS. Zhao Chen Machine Learning Intern, NVIDIA
 JOINT DETECTION AND SEGMENTATION WITH DEEP HIERARCHICAL NETWORKS Zhao Chen Machine Learning Intern, NVIDIA ABOUT ME 5th year PhD student in physics @ Stanford by day, deep learning computer vision scientist
JOINT DETECTION AND SEGMENTATION WITH DEEP HIERARCHICAL NETWORKS Zhao Chen Machine Learning Intern, NVIDIA ABOUT ME 5th year PhD student in physics @ Stanford by day, deep learning computer vision scientist
Deep Learning For Video Classification. Presented by Natalie Carlebach & Gil Sharon
 Deep Learning For Video Classification Presented by Natalie Carlebach & Gil Sharon Overview Of Presentation Motivation Challenges of video classification Common datasets 4 different methods presented in
Deep Learning For Video Classification Presented by Natalie Carlebach & Gil Sharon Overview Of Presentation Motivation Challenges of video classification Common datasets 4 different methods presented in
Deep Learning for Computer Vision II
 IIIT Hyderabad Deep Learning for Computer Vision II C. V. Jawahar Paradigm Shift Feature Extraction (SIFT, HoG, ) Part Models / Encoding Classifier Sparrow Feature Learning Classifier Sparrow L 1 L 2 L
IIIT Hyderabad Deep Learning for Computer Vision II C. V. Jawahar Paradigm Shift Feature Extraction (SIFT, HoG, ) Part Models / Encoding Classifier Sparrow Feature Learning Classifier Sparrow L 1 L 2 L
Deep Learning in Visual Recognition. Thanks Da Zhang for the slides
 Deep Learning in Visual Recognition Thanks Da Zhang for the slides Deep Learning is Everywhere 2 Roadmap Introduction Convolutional Neural Network Application Image Classification Object Detection Object
Deep Learning in Visual Recognition Thanks Da Zhang for the slides Deep Learning is Everywhere 2 Roadmap Introduction Convolutional Neural Network Application Image Classification Object Detection Object
MULTI-SCALE OBJECT DETECTION WITH FEATURE FUSION AND REGION OBJECTNESS NETWORK. Wenjie Guan, YueXian Zou*, Xiaoqun Zhou
 MULTI-SCALE OBJECT DETECTION WITH FEATURE FUSION AND REGION OBJECTNESS NETWORK Wenjie Guan, YueXian Zou*, Xiaoqun Zhou ADSPLAB/Intelligent Lab, School of ECE, Peking University, Shenzhen,518055, China
MULTI-SCALE OBJECT DETECTION WITH FEATURE FUSION AND REGION OBJECTNESS NETWORK Wenjie Guan, YueXian Zou*, Xiaoqun Zhou ADSPLAB/Intelligent Lab, School of ECE, Peking University, Shenzhen,518055, China
Disguised Face Identification (DFI) with Facial KeyPoints using Spatial Fusion Convolutional Network. Nathan Sun CIS601
 with Facial KeyPoints using Spatial Fusion Convolutional Network. Nathan Sun CIS601") Disguised Face Identification (DFI) with Facial KeyPoints using Spatial Fusion Convolutional Network Nathan Sun CIS601 Introduction Face ID is complicated by alterations to an individual s appearance Beard,
Disguised Face Identification (DFI) with Facial KeyPoints using Spatial Fusion Convolutional Network Nathan Sun CIS601 Introduction Face ID is complicated by alterations to an individual s appearance Beard,
arxiv: v1 [cs.cv] 3 Dec 2018
![arxiv: v1 [cs.cv] 3 Dec 2018](/thumbs/91/106457919.jpg "arxiv: v1 [cs.cv] 3 Dec 2018") Deep Hierarchical Machine: a Flexible Divide-and-Conquer Architecture Shichao Li 1, Xin Yang 2, and Tim Cheng 1 1 Hong Kong University of Science and Technology 2 Huazhong University of Science and Technology
Deep Hierarchical Machine: a Flexible Divide-and-Conquer Architecture Shichao Li 1, Xin Yang 2, and Tim Cheng 1 1 Hong Kong University of Science and Technology 2 Huazhong University of Science and Technology
arxiv: v1 [cs.cv] 11 Jun 2015
![arxiv: v1 [cs.cv] 11 Jun 2015](/thumbs/92/109137547.jpg "arxiv: v1 [cs.cv] 11 Jun 2015") Pose-Invariant 3D Face Alignment Amin Jourabloo, Xiaoming Liu Department of Computer Science and Engineering Michigan State University, East Lansing MI 48824 {jourablo, liuxm}@msu.edu arxiv:506.03799v
Pose-Invariant 3D Face Alignment Amin Jourabloo, Xiaoming Liu Department of Computer Science and Engineering Michigan State University, East Lansing MI 48824 {jourablo, liuxm}@msu.edu arxiv:506.03799v
OVer the last few years, cascaded-regression (CR) based
 based") 1 Random Cascaded-Regression Copse for Robust Facial Landmark Detection Zhen-Hua Feng 1,2, Student Member, IEEE, Patrik Huber 2, Josef Kittler 2, Life Member, IEEE, William Christmas 2, and Xiao-Jun Wu
1 Random Cascaded-Regression Copse for Robust Facial Landmark Detection Zhen-Hua Feng 1,2, Student Member, IEEE, Patrik Huber 2, Josef Kittler 2, Life Member, IEEE, William Christmas 2, and Xiao-Jun Wu
arxiv: v1 [cs.cv] 29 Jan 2016
![arxiv: v1 [cs.cv] 29 Jan 2016](/thumbs/93/111268398.jpg "arxiv: v1 [cs.cv] 29 Jan 2016") Face Alignment by Local Deep Descriptor Regression arxiv:1601.07950v1 [cs.cv] 29 Jan 2016 Amit Kumar University of Maryland College Park, MD 20742 akumar14@umd.edu Abstract Rajeev Ranjan University of
Face Alignment by Local Deep Descriptor Regression arxiv:1601.07950v1 [cs.cv] 29 Jan 2016 Amit Kumar University of Maryland College Park, MD 20742 akumar14@umd.edu Abstract Rajeev Ranjan University of
Volumetric and Multi-View CNNs for Object Classification on 3D Data Supplementary Material
 Volumetric and Multi-View CNNs for Object Classification on 3D Data Supplementary Material Charles R. Qi Hao Su Matthias Nießner Angela Dai Mengyuan Yan Leonidas J. Guibas Stanford University 1. Details
Volumetric and Multi-View CNNs for Object Classification on 3D Data Supplementary Material Charles R. Qi Hao Su Matthias Nießner Angela Dai Mengyuan Yan Leonidas J. Guibas Stanford University 1. Details
Real-Time Rotation-Invariant Face Detection with Progressive Calibration Networks
 Real-Time Rotation-Invariant Face Detection with Progressive Calibration Networks Xuepeng Shi 1,2 Shiguang Shan 1,3 Meina Kan 1,3 Shuzhe Wu 1,2 Xilin Chen 1 1 Key Lab of Intelligent Information Processing
Real-Time Rotation-Invariant Face Detection with Progressive Calibration Networks Xuepeng Shi 1,2 Shiguang Shan 1,3 Meina Kan 1,3 Shuzhe Wu 1,2 Xilin Chen 1 1 Key Lab of Intelligent Information Processing
Mask R-CNN. Kaiming He, Georgia, Gkioxari, Piotr Dollar, Ross Girshick Presenters: Xiaokang Wang, Mengyao Shi Feb. 13, 2018
 Mask R-CNN Kaiming He, Georgia, Gkioxari, Piotr Dollar, Ross Girshick Presenters: Xiaokang Wang, Mengyao Shi Feb. 13, 2018 1 Common computer vision tasks Image Classification: one label is generated for
Mask R-CNN Kaiming He, Georgia, Gkioxari, Piotr Dollar, Ross Girshick Presenters: Xiaokang Wang, Mengyao Shi Feb. 13, 2018 1 Common computer vision tasks Image Classification: one label is generated for
arxiv: v2 [cs.cv] 10 Aug 2017
![arxiv: v2 [cs.cv] 10 Aug 2017](/thumbs/74/69722894.jpg "arxiv: v2 [cs.cv] 10 Aug 2017") Deep Alignment Network: A convolutional neural network for robust face alignment Marek Kowalski, Jacek Naruniec, and Tomasz Trzcinski arxiv:1706.01789v2 [cs.cv] 10 Aug 2017 Warsaw University of Technology
Deep Alignment Network: A convolutional neural network for robust face alignment Marek Kowalski, Jacek Naruniec, and Tomasz Trzcinski arxiv:1706.01789v2 [cs.cv] 10 Aug 2017 Warsaw University of Technology
Tweaked residual convolutional network for face alignment
 Journal of Physics: Conference Series PAPER OPEN ACCESS Tweaked residual convolutional network for face alignment To cite this article: Wenchao Du et al 2017 J. Phys.: Conf. Ser. 887 012077 Related content
Journal of Physics: Conference Series PAPER OPEN ACCESS Tweaked residual convolutional network for face alignment To cite this article: Wenchao Du et al 2017 J. Phys.: Conf. Ser. 887 012077 Related content
Study of Residual Networks for Image Recognition
 Study of Residual Networks for Image Recognition Mohammad Sadegh Ebrahimi Stanford University sadegh@stanford.edu Hossein Karkeh Abadi Stanford University hosseink@stanford.edu Abstract Deep neural networks
Study of Residual Networks for Image Recognition Mohammad Sadegh Ebrahimi Stanford University sadegh@stanford.edu Hossein Karkeh Abadi Stanford University hosseink@stanford.edu Abstract Deep neural networks
CNN-based Cascaded Multi-task Learning of High-level Prior and Density Estimation for Crowd Counting
 CNN-based Cascaded Multi-task Learning of High-level Prior and Density Estimation for Crowd Counting Vishwanath A. Sindagi Vishal M. Patel Department of Electrical and Computer Engineering, Rutgers University
CNN-based Cascaded Multi-task Learning of High-level Prior and Density Estimation for Crowd Counting Vishwanath A. Sindagi Vishal M. Patel Department of Electrical and Computer Engineering, Rutgers University
Improving Face Recognition by Exploring Local Features with Visual Attention
 Improving Face Recognition by Exploring Local Features with Visual Attention Yichun Shi and Anil K. Jain Michigan State University Difficulties of Face Recognition Large variations in unconstrained face
Improving Face Recognition by Exploring Local Features with Visual Attention Yichun Shi and Anil K. Jain Michigan State University Difficulties of Face Recognition Large variations in unconstrained face
Locating Facial Landmarks Using Probabilistic Random Forest
 2324 IEEE SIGNAL PROCESSING LETTERS, VOL. 22, NO. 12, DECEMBER 2015 Locating Facial Landmarks Using Probabilistic Random Forest Changwei Luo, Zengfu Wang, Shaobiao Wang, Juyong Zhang, and Jun Yu Abstract
2324 IEEE SIGNAL PROCESSING LETTERS, VOL. 22, NO. 12, DECEMBER 2015 Locating Facial Landmarks Using Probabilistic Random Forest Changwei Luo, Zengfu Wang, Shaobiao Wang, Juyong Zhang, and Jun Yu Abstract
Extensive Facial Landmark Localization with Coarse-to-fine Convolutional Network Cascade
 2013 IEEE International Conference on Computer Vision Workshops Extensive Facial Landmark Localization with Coarse-to-fine Convolutional Network Cascade Erjin Zhou Haoqiang Fan Zhimin Cao Yuning Jiang
2013 IEEE International Conference on Computer Vision Workshops Extensive Facial Landmark Localization with Coarse-to-fine Convolutional Network Cascade Erjin Zhou Haoqiang Fan Zhimin Cao Yuning Jiang
Advanced Video Analysis & Imaging
 Advanced Video Analysis & Imaging (5LSH0), Module 09B Machine Learning with Convolutional Neural Networks (CNNs) - Workout Farhad G. Zanjani, Clint Sebastian, Egor Bondarev, Peter H.N. de With ( p.h.n.de.with@tue.nl
Advanced Video Analysis & Imaging (5LSH0), Module 09B Machine Learning with Convolutional Neural Networks (CNNs) - Workout Farhad G. Zanjani, Clint Sebastian, Egor Bondarev, Peter H.N. de With ( p.h.n.de.with@tue.nl
arxiv: v1 [cs.cv] 15 Oct 2018
![arxiv: v1 [cs.cv] 15 Oct 2018](/thumbs/89/98911750.jpg "arxiv: v1 [cs.cv] 15 Oct 2018") Vehicle classification using ResNets, localisation and spatially-weighted pooling Rohan Watkins, Nick Pears, Suresh Manandhar Department of Computer Science, University of York, York, UK arxiv:1810.10329v1
Vehicle classification using ResNets, localisation and spatially-weighted pooling Rohan Watkins, Nick Pears, Suresh Manandhar Department of Computer Science, University of York, York, UK arxiv:1810.10329v1
Facial Landmark Detection via Progressive Initialization
 Facial Landmark Detection via Progressive Initialization Shengtao Xiao Shuicheng Yan Ashraf A. Kassim Department of Electrical and Computer Engineering, National University of Singapore Singapore 117576
Facial Landmark Detection via Progressive Initialization Shengtao Xiao Shuicheng Yan Ashraf A. Kassim Department of Electrical and Computer Engineering, National University of Singapore Singapore 117576
Efficient Segmentation-Aided Text Detection For Intelligent Robots
 Efficient Segmentation-Aided Text Detection For Intelligent Robots Junting Zhang, Yuewei Na, Siyang Li, C.-C. Jay Kuo University of Southern California Outline Problem Definition and Motivation Related
Efficient Segmentation-Aided Text Detection For Intelligent Robots Junting Zhang, Yuewei Na, Siyang Li, C.-C. Jay Kuo University of Southern California Outline Problem Definition and Motivation Related
Know your data - many types of networks
 Architectures Know your data - many types of networks Fixed length representation Variable length representation Online video sequences, or samples of different sizes Images Specific architectures for
Architectures Know your data - many types of networks Fixed length representation Variable length representation Online video sequences, or samples of different sizes Images Specific architectures for
Deep Learning with Tensorflow AlexNet
 Machine Learning and Computer Vision Group Deep Learning with Tensorflow http://cvml.ist.ac.at/courses/dlwt_w17/ AlexNet Krizhevsky, Alex, Ilya Sutskever, and Geoffrey E. Hinton, "Imagenet classification
Machine Learning and Computer Vision Group Deep Learning with Tensorflow http://cvml.ist.ac.at/courses/dlwt_w17/ AlexNet Krizhevsky, Alex, Ilya Sutskever, and Geoffrey E. Hinton, "Imagenet classification
Face Alignment Under Various Poses and Expressions
 Face Alignment Under Various Poses and Expressions Shengjun Xin and Haizhou Ai Computer Science and Technology Department, Tsinghua University, Beijing 100084, China ahz@mail.tsinghua.edu.cn Abstract.
Face Alignment Under Various Poses and Expressions Shengjun Xin and Haizhou Ai Computer Science and Technology Department, Tsinghua University, Beijing 100084, China ahz@mail.tsinghua.edu.cn Abstract.
FaceNet. Florian Schroff, Dmitry Kalenichenko, James Philbin Google Inc. Presentation by Ignacio Aranguren and Rahul Rana
 FaceNet Florian Schroff, Dmitry Kalenichenko, James Philbin Google Inc. Presentation by Ignacio Aranguren and Rahul Rana Introduction FaceNet learns a mapping from face images to a compact Euclidean Space
FaceNet Florian Schroff, Dmitry Kalenichenko, James Philbin Google Inc. Presentation by Ignacio Aranguren and Rahul Rana Introduction FaceNet learns a mapping from face images to a compact Euclidean Space
LEARNING A MULTI-CENTER CONVOLUTIONAL NETWORK FOR UNCONSTRAINED FACE ALIGNMENT. Zhiwen Shao, Hengliang Zhu, Yangyang Hao, Min Wang, and Lizhuang Ma
 LEARNING A MULTI-CENTER CONVOLUTIONAL NETWORK FOR UNCONSTRAINED FACE ALIGNMENT Zhiwen Shao, Hengliang Zhu, Yangyang Hao, Min Wang, and Lizhuang Ma Department of Computer Science and Engineering, Shanghai
LEARNING A MULTI-CENTER CONVOLUTIONAL NETWORK FOR UNCONSTRAINED FACE ALIGNMENT Zhiwen Shao, Hengliang Zhu, Yangyang Hao, Min Wang, and Lizhuang Ma Department of Computer Science and Engineering, Shanghai