Segmentation Based on Level Combination of Irregular Pyramids
|
|
|
- Edgar Perkins
- 6 years ago
- Views:
Transcription
1 Segmentation Based on Level Combination of Irregular Pyramids Annette Morales-González, Edel Garcia-Reyes Advanced Technologies Application Center 7a No b/ 218 y 222, Siboney, Playa, P.C , Havana, Cuba amorales,egarcia@cenatav.co.cu Luis Enrique Sucar National Institute of Astrophysics, Optics and Electronics Luis Enrique Erro No. 1 Tonantzintla, Puebla 72840, MEXICO esucar@inaoep.mx Abstract In image retrieval applications, if we work with hierarchies of image partitions, it is often necessary to select the proper level of segmentation to be used or whether it should combine more than one level in order to annotate the objects. This decision may be even harder if we do not have a previous knowledge regarding the image. The contributions of this work are a new measure to evaluate the segmentation based on persistence of relevant edges and an algorithm to scan the irregular pyramids combining the better segments in order to build a new graceful image in a perceptive manner. Keywords: irregular pyramids, image segmentation, hierarchical segmentation 1 Introduction One important step to perform tasks such as object recognition or content based image annotation and retrieval is to segment images into regions that provide relevant information regarding the objects present in the image. The segmentation process usually produces a set of homogeneous regions regarding lowlevels features, which are combined by computing their similarity values. Nevertheless, this homogeneity of low-level cues will not map to the semantics of the image, and the degree of homogeneity of a region is in general quantified by threshold(s) for a given measure [7]. The low-level coherence of brightness, color, texture or motion attributes should be combine sequentially as a hierarchy of partitions [18]. Pyramids are hierarchical structures which have been widely used in segmentation tasks [13]. A pyramid segmentation algorithm describes the contents of the image using multiple representations with decreasing resolution. Each representation is built using some criteria for merging regions from the level below, where the base level of the hierarchy (level 0) is the original image. Some examples of this approach are the regular pyramids, irregular graph pyramids and combinatorial pyramids. Regular image pyramids construct the hierarchy of partitions by using the neighborhood relationships defined on each image. The reduction window, with fixed size and shape, relates each pixel of the pyramid with a set of pixels defined in the level below. The rigidity of the vertical structure of regular pyramids induces several drawbacks, such as the shift-dependence and scale-dependence problem, and the limited number of regions encoded at a given level of the pyramid [2]. The irregular graph pyramid is a stack of successively reduced graphs (being the base level the high resolution input image) where each graph is built from the graph below by selecting a set of vertices Luis Enrique Sucar and Hugo Jair Escalante (eds.): AIAR2010: Proceedings of the 1 st Automatic Image Annotation and Retrieval Workshop Copyright c 2011 for the individual papers by the papers authors. Copying permitted only for private and academic purposes. This volume is published and copyrighted by its editors., volume 1, issue: 1, pp
2 named surviving vertices and mapping each non surviving vertex to a surviving one [9]. Each vertex represents a region in the current partition and each edge represents adjacency between the regions represented by the nodes it connects. The main advantage of using this kind of graphs is that they may contain parallel edges and self-loops, which represent several common boundaries and inclusion relations respectively [3]. A combinatorial pyramid is almost like the irregular graph pyramid, but instead of using graphs for the levels, they use combinatorial maps. This representation allows to define better the inclusion relationship, by specifying which region is inside and which one is outside. It also proves to be more computationally efficient than the irregular graph pyramid representation [4]. Another approach to hierarchical segmentation is the Bounded Irregular Pyramid (BIP), which combines the regular and the irregular approach to construct the levels [14]. This method possesses both approaches advantages, such as the speed construction of the pyramid and the ability to adapt their structure to the data, but inherits the shift-variance problem of the regular pyramids and does not preserve important topological relationships such as inclusion and multiple adjacency. Although these pyramidal structures provide more information of the image producing several representations at different levels of resolution, if we plan to use one of these hierarchical approaches for image retrieval applications, processing the whole pyramid of segmentations for each image can be very time-consuming. In this case, it would be desirable to select the most suitable level of segmentation to be used (according to some criteria) or whether it should be a combination of several levels, in order to annotate the objects. Performing this selection manually may be easy, but problems emerge when we want to do the same thing automatically. This decision may be even harder if we do not have a previous knowledge regarding the image. For this purpose, we consider that a measure that automatically evaluates image segmentations may be a good indicator of wether a particular segmentation level matches some specific requirements. Several methods have been proposed to evaluate image segmentations. They can broadly be divided into two categories: analytical and empirical methods [5]. Analytical methods directly examine the algorithm by analyzing their properties, whereas empirical methods evaluate the result of the segmentations on given data sets [6]. The empirical approaches can be split up into two main categories: supervised and unsupervised evaluation. The former is based on desirable properties of well segmented images, according to the human visual interpretation while the latter requires a segmentation of reference or a priori knowledge (e.g. number of objects, shape, reference colors, etc.) [6]. Liu and Yang [12] have suggested an unsupervised quality measure based on the homogeneity of region color and limited region size and number. This measure tends to evaluate very noisy segmentations favorably when the average color error of small regions is close to zero. Borssoti et al. [1] have improve this measure in order to penalize the numerous small regions. This two functions have the problem of reaching a minimum value when the only segmented region is the entire image and favor segmentations with a limited number of regions. In [6] the authors propose an improvement to these two measures. In [17], region-based evaluation methods such as the Hamming Distance, Local Consistency Error (LCE), Bidirectional Consistency Error (BCE) are reviewed. They also revisit boundary-based evaluation methods, such as the Distance Distribution Signatures, Precision-Recall measures and the Earth Mover s distance. This techniques require apriori knowledge of the image in order to evaluate the results of the segmentation process. The contributions of this work are a new measure to evaluate the segmentation levels of the pyramid based on persistence of relevant edges, in order to obtain the levels that better depict objects and object s parts, and an algorithm to scan the irregular pyramid combining the best segments in order to build a new graceful image in a perceptive manner. Section 2 of this paper gives a brief description of the irregular pyramid approach. In Section 3 we describe the proposed method to perform the evaluation of the segmentation levels, and in Section 2
 per level.")
.")
3 4 we introduce the algorithm to combine vertices from different levels in order to build a new level. Experimental results are presented in Section 5. 2 Irregular Pyramids Overview Irregular graph pyramids are formed by a region adjacency graph (RAG) per level. In these graphs G = (V,E) the vertices (V ) represent the cells or regions, and the edges (E) represent the neighborhood relations of the regions. The graph content is stored in attributes attached to both vertices and edges (i.e. color, size, gray values of the pixels, a weight measuring the difference between the two end points). The irregular graph pyramid is then a stack of successively reduced graphs (being the base level the high resolution input image). Each graph is built from the graph below by selecting a set of vertices named surviving vertices and mapping each non surviving vertex to a surviving one. Therefore each nonsurviving vertex is the child of a surviving one which represents all the non surviving vertices mapped to it and becomes their father [9]. In Figure 1 some of these concepts are illustrated. For further details refer to [10]. a) b) c) Figure 1: Construction of the irregular pyramid. a) Set of surviving vertices, depicted in black, b) contraction kernels for this set and c) irregular pyramid built using the contraction kernels from b). Using simple graphs (graphs without multiple edges and self-loops) as the levels of the pyramid, the encoding of the spatial structure of the image might not be accurate. The lack of self-loops does not allow to differentiate inclusion from adjacency relationship. The lack of parallel edges prevent from having information regarding multiple common boundaries between two adjacent regions. To overcome these problems, the dual graph pyramids are introduced. In order to correctly represent the embedding of the graph in the image plane, the dual graph G = (V,E) of the RAG is additionally stored at each level. The RAG is also replaced by a RAG+ (enhanced region adjacency graph), which is a RAG that includes non-redundant self-loops or parallel edges [9]. Within the dual graph pyramid framework the reduction process is performed by a set of edge contractions. The edge contraction collapses two adjacent vertices into one vertex and removes the edge. This set is called a Contraction Kernel (CK) [3] (See Figure 1b). A CK is defined on a graph G = (V,E) by a set of surviving vertices S and a set of non surviving edges N such that [9]: (V,N) is a spanning forest of G Each tree of (V,N) is rooted by a vertex of S 3
4 The contraction of the graph reduces the number of vertices while maintaining the connections to other vertices. As a consequence, the decimation of a graph by a CK may induce the creation of some redundant edges. The contraction process must follow two steps [9]: 1. A set of edge contractions on G K encoded by the CK(S,N). The dual of the contracted graph G K+1 is computed from G K by removing the dual of the edges contained in N 2. The removal of redundant edges encoded by a CK applied on the dual graph. The edge contractions performed in the dual graph has to be followed by edge removals in the initial one in order to preserve the duality between the reduced graphs. Combinatorial pyramids [3] are introduced in order to properly characterize the inclusion relationship, since using graphs it is not possible to know which region is inside and which one is outside just by having a self-loop. In this case, the edge s orientation around a vertex is needed. A Combinatorial Map (CM) may be understood as a planar graph encoding explicitly the orientation of edges called darts, each dart having its origin at the vertex it is attached to. A CM can be defined as G = (D,σ,α), where D is a set of darts (an edge connecting two vertices is composed of two darts d1 and d2, each dart belonging to only one vertex), α is the reverse permutation which maps d1 to d2 and d2 to d1 and σ is the successor permutation which encodes the sequence of darts encountered when turning around a vertex [3]. The dual of a CM is defined by G = (D,ϕ,α) with ϕ = σ α. The cycles of the permutation ϕ encode the set of darts encountered when turning around a face of G [3]. A combinatorial pyramid is then a stack of successively reduced combinatorial maps, having the advantages that each CM explicitly encode the orientation of darts around each vertex and the dual is defined on the same set of darts by the permutations ϕ, therefore, only one data structure has to be encoded and maintained along the pyramid [4]. 3 Evaluating the Irregular Pyramid Levels of Segmentation We use the combinatorial pyramid framework (COMA) [8] to obtain a hierarchy of image partitions, as depicted in Figure 2. In this representation, each level is a combinatorial map [3] and connections between levels are kept among the surviving vertices of each upper level and the vertices that were merged into the surviving one in the level below. This connections can be used to traverse the hierarchy upwards and downwards. Using the entire pyramid of partitions for other tasks such as object recognition or image retrieval can be very time-consuming. Having this hierarchy of partitions, it is easy for a person to manually select one level or several levels that one might find better segmented according to some criteria. Problems emerge when we want to do the same thing automatically. In this case we confront issues like which level(s) of the pyramid we should use or if we were to select one level, can we be sure that the main object parts are well represented in such partition? For this reason, we decided to evaluate the levels of the pyramid in order to decide which levels are the best ones (according to the measure defined). We believe that the image edges can be an important criteria to evaluate segmentations results. When a partition does not preserve all relevant edges in the image, it usually means that several regions from different objects or background were merged into one single region, thus loosing very useful information. Moreover, even a partition that segments the object as a whole silhouette may not be the best one, since we are more interested in finding object s parts and its relations, in order to provide discriminative information to the object recognition algorithm. Since we do not have apriori knowledge regarding the image we chose a Canny filter to determine relevant edges, and to use the resulting edges mask as reference to evaluate the segmentation at each 4

 n where P is the set of all edge pixels from the partition being evaluated, R is the set of")
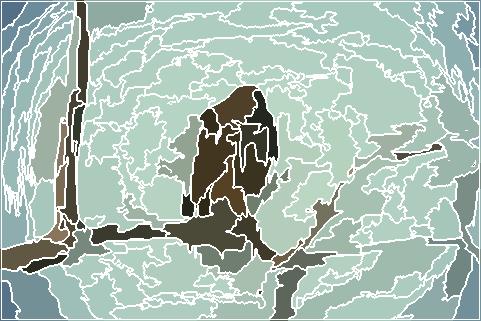
5 Level 0 (Original image) Level 3 Level 6 Level 9 Level 11 Level 13 Figure 2: Example segmentation hierarchy obtained using combinatorial pyramids. level. The Canny edge detector presupposes a notion of continuity by using thresholding with hysteresis for the detection. Before applying the Canny detector, the images are smoothed to reduce the influence of noise. For evaluating each partition of the pyramid we propose the following measures: B G = P R R B B = 1 P\R (2) n where P is the set of all edge pixels from the partition being evaluated, R is the set of edge pixels in the Canny mask image and n is the total amount of pixels in the image.. is the cardinality of set. Measure 1 evaluates how well the partition edges matched those of the Canny mask, and measure 2 evaluates how many border pixels in the partition are not present in the Canny mask. Thus, measure 1 tends to favor over-segmented partitions while measure 2 does the opposite, and penalizes partitions with more edges than those present in the mask, so these measures are combined into a global measure B using two weights W 1 and W 2. B = W 1 B G +W 2 B B (3) Some sample results of the level evaluation using the B measure can be seen in Figure 3. In this example, the 9th level of the hierarchy obtained the best evaluation. We can see in level 10 that some edges of Lena s face were lost, thus mixing a portion of the face with a background region. Also some edges of the background objects were not kept in this partition. This is why the B value starts to decrease from level 10 onwards. 4 Improving the Segmentation Beyond evaluating the partition levels, we are proposing to build a new partition, that will be a combination of regions belonging to different levels. This new partition must improve the result of the measure previously proposed. (1) 5

6 Edge mask L5 B=0.596 L6 B=0.605 L7 B=0.612 L8 B=0.617 L9 B=0.623 L10 B=0.611 L11 B=0.606 L12 B=0.586 L13 B=0.567 Figure 3: Example level evaluation of the segmentation hierarchy. At each level of the irregular pyramid, and for each vertex, a connection is kept to all the vertices in the level below that were merged into it. This is the vertex s CK. Using this information, we can use the best level evaluated by B and for each region, it is possible to search in the upper levels if it was combined with other regions into a bigger one that improves the result of B. Analogously, we can search in the levels below if it is possible to decompose a region into several regions that improve the result of B. This idea is based on the possibility that the best level evaluated by B may contain regions that are still under-segmented fragments of an object (that is better described in a region of an upper level) or it may contain regions that lost edges in the process of merging vertices in levels below, and we should retrieve these lost edges by fragmenting the region again. The selection of the vertices to be combined can be seen in Alg. 1 The process of finding the corresponding vertices in upper/lower levels with the current vertex being analyzed is done by recursively traversing the hierarchy using the connections between each vertex and its CK in the level below. The edges of the new graph can be updated by performing the same operations of contraction and removal defined for the irregular pyramids, but only in the neighborhood of the updated vertices. We can see in Figure 4 the results of applying this method. It is important to notice that the best segmentation level found for the example images shows the background less segmented than original levels, and some details and prominent edges of objects are recovered. 5 Experimental Results We ran an experiment using the ETH-80 Image Set database [11] and the B criteria to test if the improved level constructed based on the Canny edge filter mask obtains better score than the rest of original levels in the pyramid. We used the segmentation masks provided by this database as ground truth for the evaluation. For apples, in the 98% images, the level constructed outperformed the score of the regular levels when they were compared with the segmentation masks. The percentages for the other categories can be seen in Table 1 and the overall percentage score was 89.8%. It is important to notice in the cars category, which obtained the lowest result, that the segmentation mask provided by the database segments the car as a whole, while we are aiming to recover details of the car. Examples of segmented 6
7 input : Best level L K evaluated by B output: Graph formed by the combination of vertices from different levels of the pyramid Search upwards; foreach vertex v K in L K do find in upper levels the vertex v K+n that merged v K with its neighborhood N(v K ); compute B for level L K after replacing v K and N(v K ) with v K+n ; if B > B then the vertex v K+n is kept in level L K ; v K and N(v K ) are removed from L K ; end Search downwards; foreach vertex v K in L K do find in lower levels the set of vertices R K m (v K ) that was merged into v K ; compute B for level L K after replacing v K with R K m (v K ); if B > B then the set of vertices R K m (v K ) is kept in level L K ; v K is removed from L K ; end Algorithm 1: Combining pyramid levels images from this database can be seen in rows 2 and 3 of Figure 4. Table 1: Results from the experiment with the ETH-80 Image Set database. apples cars cows cups dogs horses pears tomatoes 98 % 68 % 90 % 86 % 95 % 92 % 96 % 90 % We also performed an experiment using the BSDB [15] which evaluates the performance of segmentation techniques based on the comparison of machine detected boundaries with respect to human-marked boundaries using the Precision-Recall framework [16]. Precision is a measure of how much noise is in the output of the detector. Recall is a measure of how much of the ground truth is detected. These two measures are combined into the F-measure, which is the harmonic mean of precision and recall. This benchmark consists of all of the grayscale and color hand-labeled segmentations for 300 images, performed by 30 human subjects. The images are divided into a training set of 200 images, and a test set of 100 images. They present mostly natural scenarios, animals, persons, human-made objects and buildings. The pictures may present one single object or several objects interacting in the same scene. We built the segmentation hierarchy for the 100 color images in the test set, and computed the new level by combining vertices from different levels. Some examples are presented in the rows 4, 5 and 6 of Figure 4. The pyramids for these images have an average height of 20 levels. We submitted each level obtained for the 100 images to the evaluation process and the results obtained with the F-measure shows that the new constructed level has a higher score than those of the regular levels of the pyramid. This can be seen in Figure 5. 7


 e) f) Figure 4:")
")

 - e) The")






















8 Segmentation Based on Level Combination of Pyramids a) b) c) Morales-Gonza lez, Garcia-Reyes, and Sucar d) e) f) Figure 4: Examples of the level combination result: a) Original image, b) Image mask resulting from the Canny edge filter, c) - e) The best three levels found according to the B measure, f) Improved level found by combining regions of different levels In the BSDB web page1, they show a comparison between several segmentation methods using this benchmark. The results regarding the F-measure for color images range between 0.43 and The result obtained by the proposed approach (F = 0.49) is not among the best ones. Although we obtained high recall values, the precision had low values, which means that we matched well the ground truth edges, but still have undesired over-segmentation in the new level. It also may have something to do with the fact that the precision/recall measures are not tolerant to refinement, thus it is possible for two segmentations that are mutual refinements of each other to have very low precision and recall scores [17]. Since our approach intends to segment object parts, and usually humans segments objects as a whole silhouette, our result will most likely be a refinement of the segmentation done by humans
9 Figure 5: Comparison between regular levels of the pyramid and the new level constructed. 6 Conclusions and Future Work In this work we presented a new method to evaluate the image segmentation levels obtained using irregular pyramids, since in many applications, it is desirable to work with the partitions which better represent the objects of the image, and not with the entire pyramid. This is the case of the object recognition task, where the matching between two entire pyramids has a high computational cost. Having this in mind, we proposed a measure that evaluates the segmentations based on its automatically detected edges and we also presented an approach that creates a new segmentation, which improves the initial pyramid partitions by using this criteria as reference. In general, the new segmentation obtained combining different levels from the irregular pyramid is more graceful in a perceptive manner, preserving relevant edges and subregions. Of course, the results are dependent on the edges detected originally and the results showed that we still have over-segmentation in the new level. In future work, we plan to introduce some measure from the gestalt principles in order to improve the results. Furthermore, we will study the weights W 1 and W 2 in order to find a good trade off between under and over segmentation. References [1] M. Borsotti, P. Campadelli, and R. Schettini. Quantitative evaluation of color image segmentation results. Pattern Recogn. Lett., 19(8): , [2] L. Brun and W. Kropatsch. Introduction to combinatorial pyramids. pages , [3] L. Brun and W. Kropatsch. Contains and inside relationships within combinatorial pyramids. Pattern Recogn., 39(4): , [4] Luc Brun and Walter Kropatsch. Contraction kernels and combinatorial maps. Pattern Recogn. Lett., 24(8): , [5] D. P. Dogra, A. K. Majumdar, and S. Sural. Evaluation of segmentation techniques using region size and boundary information. In PReMI 09: Proceedings of the 3rd International Conference on Pattern Recognition and Machine Intelligence, pages , Berlin, Heidelberg, Springer-Verlag. [6] Estelle Glory, Vannary Meas-Yedid, Christian Pinset, Jean-Christophe Olivo-Marin, and Georges Stamon. A quantitative criterion to evaluate color segmentations application to cytological images. In ACIVS, pages ,
10 [7] Yll Haxhimusa, Adrian Ion, and Walter G. Kropatsch. Comparing hierarchies of segmentations: Humans, normalized cut, and minimum spanning tree. In Frank Lenzen, Otmar Scherzer, and Markus Vincze, editors, Proceedings of 30th OEAGM Workshop, pages , Obergurgl, Austria, OCG. [8] T. Illetschko, A. Ion, Y. Haxhimusa, and W. G. Kropatsch. Effective programming of combinatorial maps using coma - a c++ framework for combinatorial maps. Technical Report PRIP-TR-106, PRIP, TU Wien, [9] Walter G. Kropatsch, Yll Haxhimusa, and Pascal Lienhardt. Cognitive Vision Systems: Sampling the Spectrum of Approaches, chapter 13. Hiearchies relating Topology and Geometry. Lecture Notes in Computer Science. Springer, Berlin Heidelberg, Dagstuhl, September [10] Walter G. Kropatsch, Yll Haxhimusa, Zygmunt Pizlo, and Georg Langs. Vision pyramids that do not grow too high. Pattern Recognition Letters, 26(3): , [11] B. Leibe and B. Schiele. Analyzing appearance and contour based methods for object categorization. In In IEEE Conference on Computer Vision and Pattern Recognition (CVPR 03), pages , [12] J. Liu and Y.H. Yang. Multiresolution color image segmentation. IEEE Transactions on Pattern Analysis and Machine Intelligence, 16: , [13] R. Marfil, L. Molina-Tanco, A. Bandera, J. A. Rodríguez, and F. Sandoval. Pyramid segmentation algorithms revisited. Pattern Recogn., 39(8): , [14] R. Marfil and F. Sandoval. Energy-based perceptual segmentation using an irregular pyramid. In IWANN 09: Proceedings of the 10th International Work-Conference on Artificial Neural Networks, pages , Berlin, Heidelberg, Springer-Verlag. [15] D. Martin, C. Fowlkes, D. Tal, and J. Malik. A database of human segmented natural images and its application to evaluating segmentation algorithms and measuring ecological statistics. In Proc. 8th Int l Conf. Computer Vision, volume 2, pages , July [16] David R. Martin, Charless C. Fowlkes, and Jitendra Malik. Learning to detect natural image boundaries using local brightness, color, and texture cues. IEEE Trans. Pattern Anal. Mach. Intell., 26(5): , [17] Fernando C. Monteiro and Aurélio C. Campilho. Performance evaluation of image segmentation. In ICIAR (1), pages , [18] Jianbo Shi and Jitendra Malik. Normalized cuts and image segmentation. IEEE Transactions on Pattern Analysis and Machine Intelligence (PAMI),
Noise Robustness of Irregular LBP Pyramids
 Noise Robustness of Irregular LBP Pyramids Christoph Körner, Ines Janusch, Walter G. Kropatsch Pattern Recognition and Image Processing (PRIP) Vienna University of Technology, Austria {christoph,ines,krw}@prip.tuwien.ac.at
Noise Robustness of Irregular LBP Pyramids Christoph Körner, Ines Janusch, Walter G. Kropatsch Pattern Recognition and Image Processing (PRIP) Vienna University of Technology, Austria {christoph,ines,krw}@prip.tuwien.ac.at
Considerations Regarding the Minimum Spanning Tree Pyramid Segmentation Method
 Considerations Regarding the Minimum Spanning Tree Pyramid Segmentation Method (Why does it always find the lady?) Adrian Ion, Walter G. Kropatsch, and Yll Haxhimusa Vienna University of Technology, Pattern
Considerations Regarding the Minimum Spanning Tree Pyramid Segmentation Method (Why does it always find the lady?) Adrian Ion, Walter G. Kropatsch, and Yll Haxhimusa Vienna University of Technology, Pattern
Hierarchical Interactive Image Segmentation using Irregular Pyramids
 Hierarchical Interactive Image Segmentation using Irregular Pyramids Michael Gerstmayer, Yll Haxhimusa, and Walter G. Kropatsch Pattern Recognition and Image Processing Group Institute of Computer Graphics
Hierarchical Interactive Image Segmentation using Irregular Pyramids Michael Gerstmayer, Yll Haxhimusa, and Walter G. Kropatsch Pattern Recognition and Image Processing Group Institute of Computer Graphics
Hierarchical Interactive Image Segmentation using Irregular Pyramids
 Hierarchical Interactive Image Segmentation using Irregular Pyramids Michael Gerstmayer, Yll Haxhimusa, and Walter G. Kropatsch Pattern Recognition and Image Processing Group Vienna University of Technology
Hierarchical Interactive Image Segmentation using Irregular Pyramids Michael Gerstmayer, Yll Haxhimusa, and Walter G. Kropatsch Pattern Recognition and Image Processing Group Vienna University of Technology
Simplified Quadtree Image Segmentation for Image Annotation
 for Image Annotation Gerardo Rodmar Conde Márquez Benemérita Universidad Autónoma de Puebla 14 sur y Av. San Claudio, San Manuel, 72570,Puebla, Mexico condemarquezg@acm.org Hugo Jair Escalante, Universidad
for Image Annotation Gerardo Rodmar Conde Márquez Benemérita Universidad Autónoma de Puebla 14 sur y Av. San Claudio, San Manuel, 72570,Puebla, Mexico condemarquezg@acm.org Hugo Jair Escalante, Universidad
Hierarchical Watersheds Within the Combinatorial Pyramid Framework
 Hierarchical Watersheds Within the Combinatorial Pyramid Framework Luc Brun, Myriam Mokhtari, and Fernand Meyer GreyC CNRS UMR 6072, Équipe Image - Ensicaen, 6, Boulevard du Maréchal Juin, 14050 CAEN Cedex
Hierarchical Watersheds Within the Combinatorial Pyramid Framework Luc Brun, Myriam Mokhtari, and Fernand Meyer GreyC CNRS UMR 6072, Équipe Image - Ensicaen, 6, Boulevard du Maréchal Juin, 14050 CAEN Cedex
Combining Top-down and Bottom-up Segmentation
 Combining Top-down and Bottom-up Segmentation Authors: Eran Borenstein, Eitan Sharon, Shimon Ullman Presenter: Collin McCarthy Introduction Goal Separate object from background Problems Inaccuracies Top-down
Combining Top-down and Bottom-up Segmentation Authors: Eran Borenstein, Eitan Sharon, Shimon Ullman Presenter: Collin McCarthy Introduction Goal Separate object from background Problems Inaccuracies Top-down
OBJECT-ORIENTED HIERARCHICAL IMAGE VECTORIZATION
 OBJECT-ORIENTED HIERARCHICAL IMAGE VECTORIZATION A. N. Skurikhin a, *, P. L. Volegov b a MS D436, Space and Remote Sensing Group, Los Alamos National Laboratory, Los Alamos, NM, 87545, USA - alexei@lanl.gov
OBJECT-ORIENTED HIERARCHICAL IMAGE VECTORIZATION A. N. Skurikhin a, *, P. L. Volegov b a MS D436, Space and Remote Sensing Group, Los Alamos National Laboratory, Los Alamos, NM, 87545, USA - alexei@lanl.gov
Topic 4 Image Segmentation
 Topic 4 Image Segmentation What is Segmentation? Why? Segmentation important contributing factor to the success of an automated image analysis process What is Image Analysis: Processing images to derive
Topic 4 Image Segmentation What is Segmentation? Why? Segmentation important contributing factor to the success of an automated image analysis process What is Image Analysis: Processing images to derive
Solution: filter the image, then subsample F 1 F 2. subsample blur subsample. blur
 Pyramids Gaussian pre-filtering Solution: filter the image, then subsample blur F 0 subsample blur subsample * F 0 H F 1 F 1 * H F 2 { Gaussian pyramid blur F 0 subsample blur subsample * F 0 H F 1 F 1
Pyramids Gaussian pre-filtering Solution: filter the image, then subsample blur F 0 subsample blur subsample * F 0 H F 1 F 1 * H F 2 { Gaussian pyramid blur F 0 subsample blur subsample * F 0 H F 1 F 1
Contains and inside relationships within combinatorial pyramids
 Pattern Recognition 39 (2006) 515 526 www.elsevier.com/locate/patcog Contains and inside relationships within combinatorial pyramids Luc Brun a, Walter Kropatsch b,,1 a GreYC -CNRS UMR 6072, ENSICAEN,
Pattern Recognition 39 (2006) 515 526 www.elsevier.com/locate/patcog Contains and inside relationships within combinatorial pyramids Luc Brun a, Walter Kropatsch b,,1 a GreYC -CNRS UMR 6072, ENSICAEN,
CHAPTER 6 QUANTITATIVE PERFORMANCE ANALYSIS OF THE PROPOSED COLOR TEXTURE SEGMENTATION ALGORITHMS
 145 CHAPTER 6 QUANTITATIVE PERFORMANCE ANALYSIS OF THE PROPOSED COLOR TEXTURE SEGMENTATION ALGORITHMS 6.1 INTRODUCTION This chapter analyzes the performance of the three proposed colortexture segmentation
145 CHAPTER 6 QUANTITATIVE PERFORMANCE ANALYSIS OF THE PROPOSED COLOR TEXTURE SEGMENTATION ALGORITHMS 6.1 INTRODUCTION This chapter analyzes the performance of the three proposed colortexture segmentation
Segmentation of Images
 Segmentation of Images SEGMENTATION If an image has been preprocessed appropriately to remove noise and artifacts, segmentation is often the key step in interpreting the image. Image segmentation is a
Segmentation of Images SEGMENTATION If an image has been preprocessed appropriately to remove noise and artifacts, segmentation is often the key step in interpreting the image. Image segmentation is a
Color Image Segmentation
 Color Image Segmentation Yining Deng, B. S. Manjunath and Hyundoo Shin* Department of Electrical and Computer Engineering University of California, Santa Barbara, CA 93106-9560 *Samsung Electronics Inc.
Color Image Segmentation Yining Deng, B. S. Manjunath and Hyundoo Shin* Department of Electrical and Computer Engineering University of California, Santa Barbara, CA 93106-9560 *Samsung Electronics Inc.
arxiv:cs/ v1 [cs.cv] 24 Jan 2007
![arxiv:cs/ v1 [cs.cv] 24 Jan 2007](/thumbs/74/70551378.jpg "arxiv:cs/ v1 [cs.cv] 24 Jan 2007") Contains and Inside relationships within Combinatorial Pyramids arxiv:cs/0701150v1 [cs.cv] 24 Jan 2007 Luc Brun a, Walter Kropatsch b,1 a GreYC -CNRS UMR 6072 ENSICAEN 6 Boulevard du Maréchal Juin 14045
Contains and Inside relationships within Combinatorial Pyramids arxiv:cs/0701150v1 [cs.cv] 24 Jan 2007 Luc Brun a, Walter Kropatsch b,1 a GreYC -CNRS UMR 6072 ENSICAEN 6 Boulevard du Maréchal Juin 14045
CS 534: Computer Vision Segmentation and Perceptual Grouping
 CS 534: Computer Vision Segmentation and Perceptual Grouping Ahmed Elgammal Dept of Computer Science CS 534 Segmentation - 1 Outlines Mid-level vision What is segmentation Perceptual Grouping Segmentation
CS 534: Computer Vision Segmentation and Perceptual Grouping Ahmed Elgammal Dept of Computer Science CS 534 Segmentation - 1 Outlines Mid-level vision What is segmentation Perceptual Grouping Segmentation
Image Segmentation for Image Object Extraction
 Image Segmentation for Image Object Extraction Rohit Kamble, Keshav Kaul # Computer Department, Vishwakarma Institute of Information Technology, Pune kamble.rohit@hotmail.com, kaul.keshav@gmail.com ABSTRACT
Image Segmentation for Image Object Extraction Rohit Kamble, Keshav Kaul # Computer Department, Vishwakarma Institute of Information Technology, Pune kamble.rohit@hotmail.com, kaul.keshav@gmail.com ABSTRACT
Latest development in image feature representation and extraction
 International Journal of Advanced Research and Development ISSN: 2455-4030, Impact Factor: RJIF 5.24 www.advancedjournal.com Volume 2; Issue 1; January 2017; Page No. 05-09 Latest development in image
International Journal of Advanced Research and Development ISSN: 2455-4030, Impact Factor: RJIF 5.24 www.advancedjournal.com Volume 2; Issue 1; January 2017; Page No. 05-09 Latest development in image
Image Segmentation Via Iterative Geodesic Averaging
 Image Segmentation Via Iterative Geodesic Averaging Asmaa Hosni, Michael Bleyer and Margrit Gelautz Institute for Software Technology and Interactive Systems, Vienna University of Technology Favoritenstr.
Image Segmentation Via Iterative Geodesic Averaging Asmaa Hosni, Michael Bleyer and Margrit Gelautz Institute for Software Technology and Interactive Systems, Vienna University of Technology Favoritenstr.
Boundaries and Sketches
 Boundaries and Sketches Szeliski 4.2 Computer Vision James Hays Many slides from Michael Maire, Jitendra Malek Today s lecture Segmentation vs Boundary Detection Why boundaries / Grouping? Recap: Canny
Boundaries and Sketches Szeliski 4.2 Computer Vision James Hays Many slides from Michael Maire, Jitendra Malek Today s lecture Segmentation vs Boundary Detection Why boundaries / Grouping? Recap: Canny
Medial Features for Superpixel Segmentation
 Medial Features for Superpixel Segmentation David Engel Luciano Spinello Rudolph Triebel Roland Siegwart Heinrich H. Bülthoff Cristóbal Curio Max Planck Institute for Biological Cybernetics Spemannstr.
Medial Features for Superpixel Segmentation David Engel Luciano Spinello Rudolph Triebel Roland Siegwart Heinrich H. Bülthoff Cristóbal Curio Max Planck Institute for Biological Cybernetics Spemannstr.
Applying Catastrophe Theory to Image Segmentation
 Applying Catastrophe Theory to Image Segmentation Mohamad Raad, Majd Ghareeb, Ali Bazzi Department of computer and communications engineering Lebanese International University Beirut, Lebanon Abstract
Applying Catastrophe Theory to Image Segmentation Mohamad Raad, Majd Ghareeb, Ali Bazzi Department of computer and communications engineering Lebanese International University Beirut, Lebanon Abstract
Graph-theoretic Issues in Remote Sensing and Landscape Ecology
 EnviroInfo 2002 (Wien) Environmental Communication in the Information Society - Proceedings of the 16th Conference Graph-theoretic Issues in Remote Sensing and Landscape Ecology Joachim Steinwendner 1
EnviroInfo 2002 (Wien) Environmental Communication in the Information Society - Proceedings of the 16th Conference Graph-theoretic Issues in Remote Sensing and Landscape Ecology Joachim Steinwendner 1
identified and grouped together.
 Segmentation ti of Images SEGMENTATION If an image has been preprocessed appropriately to remove noise and artifacts, segmentation is often the key step in interpreting the image. Image segmentation is
Segmentation ti of Images SEGMENTATION If an image has been preprocessed appropriately to remove noise and artifacts, segmentation is often the key step in interpreting the image. Image segmentation is
In this lecture, we are going to talk about image segmentation, essentially defined as methods for grouping pixels together.
 In this lecture, we are going to talk about image segmentation, essentially defined as methods for grouping pixels together. We will first define the segmentation problem, overview some basic ideas of
In this lecture, we are going to talk about image segmentation, essentially defined as methods for grouping pixels together. We will first define the segmentation problem, overview some basic ideas of
Finding Stable Extremal Region Boundaries
 Finding Stable Extremal Region Boundaries Hayko Riemenschneider, Michael Donoser, and Horst Bischof Institute for Computer Graphics and Vision Graz University of Technology, Austria {hayko,donoser,bischof}@icg.tugraz.at
Finding Stable Extremal Region Boundaries Hayko Riemenschneider, Michael Donoser, and Horst Bischof Institute for Computer Graphics and Vision Graz University of Technology, Austria {hayko,donoser,bischof}@icg.tugraz.at
Triangle Strip Multiresolution Modelling Using Sorted Edges
 Triangle Strip Multiresolution Modelling Using Sorted Edges Ó. Belmonte Fernández, S. Aguado González, and S. Sancho Chust Department of Computer Languages and Systems Universitat Jaume I 12071 Castellon,
Triangle Strip Multiresolution Modelling Using Sorted Edges Ó. Belmonte Fernández, S. Aguado González, and S. Sancho Chust Department of Computer Languages and Systems Universitat Jaume I 12071 Castellon,
Supervised texture detection in images
 Supervised texture detection in images Branislav Mičušík and Allan Hanbury Pattern Recognition and Image Processing Group, Institute of Computer Aided Automation, Vienna University of Technology Favoritenstraße
Supervised texture detection in images Branislav Mičušík and Allan Hanbury Pattern Recognition and Image Processing Group, Institute of Computer Aided Automation, Vienna University of Technology Favoritenstraße
ELEC Dr Reji Mathew Electrical Engineering UNSW
 ELEC 4622 Dr Reji Mathew Electrical Engineering UNSW Review of Motion Modelling and Estimation Introduction to Motion Modelling & Estimation Forward Motion Backward Motion Block Motion Estimation Motion
ELEC 4622 Dr Reji Mathew Electrical Engineering UNSW Review of Motion Modelling and Estimation Introduction to Motion Modelling & Estimation Forward Motion Backward Motion Block Motion Estimation Motion
EE 701 ROBOT VISION. Segmentation
 EE 701 ROBOT VISION Regions and Image Segmentation Histogram-based Segmentation Automatic Thresholding K-means Clustering Spatial Coherence Merging and Splitting Graph Theoretic Segmentation Region Growing
EE 701 ROBOT VISION Regions and Image Segmentation Histogram-based Segmentation Automatic Thresholding K-means Clustering Spatial Coherence Merging and Splitting Graph Theoretic Segmentation Region Growing
2D image segmentation based on spatial coherence
 2D image segmentation based on spatial coherence Václav Hlaváč Czech Technical University in Prague Center for Machine Perception (bridging groups of the) Czech Institute of Informatics, Robotics and Cybernetics
2D image segmentation based on spatial coherence Václav Hlaváč Czech Technical University in Prague Center for Machine Perception (bridging groups of the) Czech Institute of Informatics, Robotics and Cybernetics
APPLIED GRAPH THEORY IN COMPUTER VISION AND PATTERN RECOGNITION
 APPLIED GRAPH THEORY IN COMPUTER VISION AND PATTERN RECOGNITION Abraham Kandel, Horst Bunke, and Mark Last (Eds.) CHAPTER Multiresolution image segmentations in Graph Pyramids Walter G. Kropatsch, Yll
APPLIED GRAPH THEORY IN COMPUTER VISION AND PATTERN RECOGNITION Abraham Kandel, Horst Bunke, and Mark Last (Eds.) CHAPTER Multiresolution image segmentations in Graph Pyramids Walter G. Kropatsch, Yll
Two-Level Image Segmentation Based on Region andedgeintegration
 Two-Level Image Segmentation Based on Region andedgeintegration Qing Wu and Yizhou Yu Department of Computer Science University of Illinois at Urbana-Champaign Urbana, IL 61801, USA {qingwu1,yyz}@uiuc.edu
Two-Level Image Segmentation Based on Region andedgeintegration Qing Wu and Yizhou Yu Department of Computer Science University of Illinois at Urbana-Champaign Urbana, IL 61801, USA {qingwu1,yyz}@uiuc.edu
Layout Segmentation of Scanned Newspaper Documents
 , pp-05-10 Layout Segmentation of Scanned Newspaper Documents A.Bandyopadhyay, A. Ganguly and U.Pal CVPR Unit, Indian Statistical Institute 203 B T Road, Kolkata, India. Abstract: Layout segmentation algorithms
, pp-05-10 Layout Segmentation of Scanned Newspaper Documents A.Bandyopadhyay, A. Ganguly and U.Pal CVPR Unit, Indian Statistical Institute 203 B T Road, Kolkata, India. Abstract: Layout segmentation algorithms
CS 664 Segmentation. Daniel Huttenlocher
 CS 664 Segmentation Daniel Huttenlocher Grouping Perceptual Organization Structural relationships between tokens Parallelism, symmetry, alignment Similarity of token properties Often strong psychophysical
CS 664 Segmentation Daniel Huttenlocher Grouping Perceptual Organization Structural relationships between tokens Parallelism, symmetry, alignment Similarity of token properties Often strong psychophysical
Edge and Texture. CS 554 Computer Vision Pinar Duygulu Bilkent University
 Edge and Texture CS 554 Computer Vision Pinar Duygulu Bilkent University Filters for features Previously, thinking of filtering as a way to remove or reduce noise Now, consider how filters will allow us
Edge and Texture CS 554 Computer Vision Pinar Duygulu Bilkent University Filters for features Previously, thinking of filtering as a way to remove or reduce noise Now, consider how filters will allow us
Deformable Part Models
 CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
Normalized cuts and image segmentation
 Normalized cuts and image segmentation Department of EE University of Washington Yeping Su Xiaodan Song Normalized Cuts and Image Segmentation, IEEE Trans. PAMI, August 2000 5/20/2003 1 Outline 1. Image
Normalized cuts and image segmentation Department of EE University of Washington Yeping Su Xiaodan Song Normalized Cuts and Image Segmentation, IEEE Trans. PAMI, August 2000 5/20/2003 1 Outline 1. Image
Linear combinations of simple classifiers for the PASCAL challenge
 Linear combinations of simple classifiers for the PASCAL challenge Nik A. Melchior and David Lee 16 721 Advanced Perception The Robotics Institute Carnegie Mellon University Email: melchior@cmu.edu, dlee1@andrew.cmu.edu
Linear combinations of simple classifiers for the PASCAL challenge Nik A. Melchior and David Lee 16 721 Advanced Perception The Robotics Institute Carnegie Mellon University Email: melchior@cmu.edu, dlee1@andrew.cmu.edu
Extraction of tiled top-down irregular pyramids from large images
 Extraction of tiled top-down irregular pyramids from large images Romain Goffe 1 Guillaume Damiand 2 Luc Brun 3 1 SIC-XLIM, Université de Poitiers, CNRS, UMR6172, Bâtiment SP2MI, F-86962, Futuroscope Chasseneuil,
Extraction of tiled top-down irregular pyramids from large images Romain Goffe 1 Guillaume Damiand 2 Luc Brun 3 1 SIC-XLIM, Université de Poitiers, CNRS, UMR6172, Bâtiment SP2MI, F-86962, Futuroscope Chasseneuil,
Edges and Binary Images
 CS 699: Intro to Computer Vision Edges and Binary Images Prof. Adriana Kovashka University of Pittsburgh September 5, 205 Plan for today Edge detection Binary image analysis Homework Due on 9/22, :59pm
CS 699: Intro to Computer Vision Edges and Binary Images Prof. Adriana Kovashka University of Pittsburgh September 5, 205 Plan for today Edge detection Binary image analysis Homework Due on 9/22, :59pm
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Edge Histogram Descriptor, Geometric Moment and Sobel Edge Detector Combined Features Based Object Recognition and Retrieval System
 Edge Histogram Descriptor, Geometric Moment and Sobel Edge Detector Combined Features Based Object Recognition and Retrieval System Neetesh Prajapati M. Tech Scholar VNS college,bhopal Amit Kumar Nandanwar
Edge Histogram Descriptor, Geometric Moment and Sobel Edge Detector Combined Features Based Object Recognition and Retrieval System Neetesh Prajapati M. Tech Scholar VNS college,bhopal Amit Kumar Nandanwar
Edge Detection. Computer Vision Shiv Ram Dubey, IIIT Sri City
 Edge Detection Computer Vision Shiv Ram Dubey, IIIT Sri City Previous two classes: Image Filtering Spatial domain Smoothing, sharpening, measuring texture * = FFT FFT Inverse FFT = Frequency domain Denoising,
Edge Detection Computer Vision Shiv Ram Dubey, IIIT Sri City Previous two classes: Image Filtering Spatial domain Smoothing, sharpening, measuring texture * = FFT FFT Inverse FFT = Frequency domain Denoising,
Adaptive Dominant Points Detector for Visual Landmarks Description Λ
 Adaptive Dominant Points Detector for Visual Landmarks Description Λ Esther Antúnez 1, Rebeca Marl 2, Antonio Bandera 2, and Walter G. Kropatsch 1 1 PRIP, Vienna University of Technology, Austria fenunez,krwg@prip.tuwien.ac.at
Adaptive Dominant Points Detector for Visual Landmarks Description Λ Esther Antúnez 1, Rebeca Marl 2, Antonio Bandera 2, and Walter G. Kropatsch 1 1 PRIP, Vienna University of Technology, Austria fenunez,krwg@prip.tuwien.ac.at
An Object Detection System using Image Reconstruction with PCA
 An Object Detection System using Image Reconstruction with PCA Luis Malagón-Borja and Olac Fuentes Instituto Nacional de Astrofísica Óptica y Electrónica, Puebla, 72840 Mexico jmb@ccc.inaoep.mx, fuentes@inaoep.mx
An Object Detection System using Image Reconstruction with PCA Luis Malagón-Borja and Olac Fuentes Instituto Nacional de Astrofísica Óptica y Electrónica, Puebla, 72840 Mexico jmb@ccc.inaoep.mx, fuentes@inaoep.mx
New Method for Evaluation of Video Segmentation Quality
 New Method for Evaluation of Video Segmentation Quality Mahmud Abdulla Mohammad, Ioannis Kaloskampis and Yulia Hicks School of Engineering, Cardiff University, Queen s Buildings, The Parade, Cardiff, UK
New Method for Evaluation of Video Segmentation Quality Mahmud Abdulla Mohammad, Ioannis Kaloskampis and Yulia Hicks School of Engineering, Cardiff University, Queen s Buildings, The Parade, Cardiff, UK
Map Edit Distance vs Graph Edit Distance for Matching Images
 Map Edit Distance vs Graph Edit Distance for Matching Images Camille Combier 1,2, Guillaume Damiand 3,2, and Christine Solnon 3,2 1 Université Lyon 1, LIRIS, UMR 5205 CNRS, 69622 Villeurbanne, France 2
Map Edit Distance vs Graph Edit Distance for Matching Images Camille Combier 1,2, Guillaume Damiand 3,2, and Christine Solnon 3,2 1 Université Lyon 1, LIRIS, UMR 5205 CNRS, 69622 Villeurbanne, France 2
Improving the Efficiency of Fast Using Semantic Similarity Algorithm
 International Journal of Scientific and Research Publications, Volume 4, Issue 1, January 2014 1 Improving the Efficiency of Fast Using Semantic Similarity Algorithm D.KARTHIKA 1, S. DIVAKAR 2 Final year
International Journal of Scientific and Research Publications, Volume 4, Issue 1, January 2014 1 Improving the Efficiency of Fast Using Semantic Similarity Algorithm D.KARTHIKA 1, S. DIVAKAR 2 Final year
Motion Detection Algorithm
 Volume 1, No. 12, February 2013 ISSN 2278-1080 The International Journal of Computer Science & Applications (TIJCSA) RESEARCH PAPER Available Online at http://www.journalofcomputerscience.com/ Motion Detection
Volume 1, No. 12, February 2013 ISSN 2278-1080 The International Journal of Computer Science & Applications (TIJCSA) RESEARCH PAPER Available Online at http://www.journalofcomputerscience.com/ Motion Detection
ECG782: Multidimensional Digital Signal Processing
 Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spring 2014 TTh 14:30-15:45 CBC C313 Lecture 10 Segmentation 14/02/27 http://www.ee.unlv.edu/~b1morris/ecg782/
Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spring 2014 TTh 14:30-15:45 CBC C313 Lecture 10 Segmentation 14/02/27 http://www.ee.unlv.edu/~b1morris/ecg782/
Modified Bit-Planes Sobel Operator: A New Approach to Edge Detection
 Modified Bit-Planes Sobel Operator: A New Approach to Edge Detection Rashi Agarwal, Ph.D Reader, IT Department CSJMU Kanpur-208024 ABSTRACT The detection of edges in images is a vital operation with applications
Modified Bit-Planes Sobel Operator: A New Approach to Edge Detection Rashi Agarwal, Ph.D Reader, IT Department CSJMU Kanpur-208024 ABSTRACT The detection of edges in images is a vital operation with applications
Segmentation. (template) matching
 matching") Segmentation. (template) matching 1 Announcements Midterm March 3 2010, in class Duration: 45 min Weight: 20% of final course mark Closed book, closed notes Calculator allowed Practice midterm posted.
Segmentation. (template) matching 1 Announcements Midterm March 3 2010, in class Duration: 45 min Weight: 20% of final course mark Closed book, closed notes Calculator allowed Practice midterm posted.
3-Dimensional Object Modeling with Mesh Simplification Based Resolution Adjustment
 3-Dimensional Object Modeling with Mesh Simplification Based Resolution Adjustment Özgür ULUCAY Sarp ERTÜRK University of Kocaeli Electronics & Communication Engineering Department 41040 Izmit, Kocaeli
3-Dimensional Object Modeling with Mesh Simplification Based Resolution Adjustment Özgür ULUCAY Sarp ERTÜRK University of Kocaeli Electronics & Communication Engineering Department 41040 Izmit, Kocaeli
Data Hiding in Binary Text Documents 1. Q. Mei, E. K. Wong, and N. Memon
 Data Hiding in Binary Text Documents 1 Q. Mei, E. K. Wong, and N. Memon Department of Computer and Information Science Polytechnic University 5 Metrotech Center, Brooklyn, NY 11201 ABSTRACT With the proliferation
Data Hiding in Binary Text Documents 1 Q. Mei, E. K. Wong, and N. Memon Department of Computer and Information Science Polytechnic University 5 Metrotech Center, Brooklyn, NY 11201 ABSTRACT With the proliferation
A Developer s Survey of Polygonal Simplification algorithms. CS 563 Advanced Topics in Computer Graphics Fan Wu Mar. 31, 2005
 A Developer s Survey of Polygonal Simplification algorithms CS 563 Advanced Topics in Computer Graphics Fan Wu Mar. 31, 2005 Some questions to ask Why simplification? What are my models like? What matters
A Developer s Survey of Polygonal Simplification algorithms CS 563 Advanced Topics in Computer Graphics Fan Wu Mar. 31, 2005 Some questions to ask Why simplification? What are my models like? What matters
Beyond Bags of features Spatial information & Shape models
 Beyond Bags of features Spatial information & Shape models Jana Kosecka Many slides adapted from S. Lazebnik, FeiFei Li, Rob Fergus, and Antonio Torralba Detection, recognition (so far )! Bags of features
Beyond Bags of features Spatial information & Shape models Jana Kosecka Many slides adapted from S. Lazebnik, FeiFei Li, Rob Fergus, and Antonio Torralba Detection, recognition (so far )! Bags of features
STRUCTURAL EDGE LEARNING FOR 3-D RECONSTRUCTION FROM A SINGLE STILL IMAGE. Nan Hu. Stanford University Electrical Engineering
 STRUCTURAL EDGE LEARNING FOR 3-D RECONSTRUCTION FROM A SINGLE STILL IMAGE Nan Hu Stanford University Electrical Engineering nanhu@stanford.edu ABSTRACT Learning 3-D scene structure from a single still
STRUCTURAL EDGE LEARNING FOR 3-D RECONSTRUCTION FROM A SINGLE STILL IMAGE Nan Hu Stanford University Electrical Engineering nanhu@stanford.edu ABSTRACT Learning 3-D scene structure from a single still
Texture Image Segmentation using FCM
 Proceedings of 2012 4th International Conference on Machine Learning and Computing IPCSIT vol. 25 (2012) (2012) IACSIT Press, Singapore Texture Image Segmentation using FCM Kanchan S. Deshmukh + M.G.M
Proceedings of 2012 4th International Conference on Machine Learning and Computing IPCSIT vol. 25 (2012) (2012) IACSIT Press, Singapore Texture Image Segmentation using FCM Kanchan S. Deshmukh + M.G.M
A Graph-Based Concept for Spatiotemporal Information in Cognitive Vision 1
 Technical Report Pattern Recognition and Image Processing Group Institute of Computer Aided Automation Vienna University of Technology Favoritenstr. 9/183-2 A-1040 Vienna AUSTRIA Phone: +43 (1) 58801-18351
Technical Report Pattern Recognition and Image Processing Group Institute of Computer Aided Automation Vienna University of Technology Favoritenstr. 9/183-2 A-1040 Vienna AUSTRIA Phone: +43 (1) 58801-18351
Image Analysis. Edge Detection
 Image Analysis Edge Detection Christophoros Nikou cnikou@cs.uoi.gr Images taken from: Computer Vision course by Kristen Grauman, University of Texas at Austin (http://www.cs.utexas.edu/~grauman/courses/spring2011/index.html).
Image Analysis Edge Detection Christophoros Nikou cnikou@cs.uoi.gr Images taken from: Computer Vision course by Kristen Grauman, University of Texas at Austin (http://www.cs.utexas.edu/~grauman/courses/spring2011/index.html).
Image Segmentation. Lecture14: Image Segmentation. Sample Segmentation Results. Use of Image Segmentation
 Image Segmentation CSED441:Introduction to Computer Vision (2015S) Lecture14: Image Segmentation What is image segmentation? Process of partitioning an image into multiple homogeneous segments Process
Image Segmentation CSED441:Introduction to Computer Vision (2015S) Lecture14: Image Segmentation What is image segmentation? Process of partitioning an image into multiple homogeneous segments Process
TEXT SEGMENTATION ON PHOTOREALISTIC IMAGES
 TEXT SEGMENTATION ON PHOTOREALISTIC IMAGES Valery Grishkin a, Alexander Ebral b, Nikolai Stepenko c, Jean Sene d Saint Petersburg State University, 7 9 Universitetskaya nab., Saint Petersburg, 199034,
TEXT SEGMENTATION ON PHOTOREALISTIC IMAGES Valery Grishkin a, Alexander Ebral b, Nikolai Stepenko c, Jean Sene d Saint Petersburg State University, 7 9 Universitetskaya nab., Saint Petersburg, 199034,
Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks
 Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks Si Chen The George Washington University sichen@gwmail.gwu.edu Meera Hahn Emory University mhahn7@emory.edu Mentor: Afshin
Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks Si Chen The George Washington University sichen@gwmail.gwu.edu Meera Hahn Emory University mhahn7@emory.edu Mentor: Afshin
Scale-invariant Region-based Hierarchical Image Matching
 Scale-invariant Region-based Hierarchical Image Matching Sinisa Todorovic and Narendra Ahuja Beckman Institute, University of Illinois at Urbana-Champaign {n-ahuja, sintod}@uiuc.edu Abstract This paper
Scale-invariant Region-based Hierarchical Image Matching Sinisa Todorovic and Narendra Ahuja Beckman Institute, University of Illinois at Urbana-Champaign {n-ahuja, sintod}@uiuc.edu Abstract This paper
Combinatorial optimization and its applications in image Processing. Filip Malmberg
 Combinatorial optimization and its applications in image Processing Filip Malmberg Part 1: Optimization in image processing Optimization in image processing Many image processing problems can be formulated
Combinatorial optimization and its applications in image Processing Filip Malmberg Part 1: Optimization in image processing Optimization in image processing Many image processing problems can be formulated
Determination of Similarity Threshold in Clustering Problems for Large Data Sets
 Determination of Similarity Threshold in Clustering Problems for Large Data Sets Guillermo Sánchez-Díaz 1 and José F. Martínez-Trinidad 2 1 Center of Technologies Research on Information and Systems, The
Determination of Similarity Threshold in Clustering Problems for Large Data Sets Guillermo Sánchez-Díaz 1 and José F. Martínez-Trinidad 2 1 Center of Technologies Research on Information and Systems, The
RESTORATION OF DEGRADED DOCUMENTS USING IMAGE BINARIZATION TECHNIQUE
 RESTORATION OF DEGRADED DOCUMENTS USING IMAGE BINARIZATION TECHNIQUE K. Kaviya Selvi 1 and R. S. Sabeenian 2 1 Department of Electronics and Communication Engineering, Communication Systems, Sona College
RESTORATION OF DEGRADED DOCUMENTS USING IMAGE BINARIZATION TECHNIQUE K. Kaviya Selvi 1 and R. S. Sabeenian 2 1 Department of Electronics and Communication Engineering, Communication Systems, Sona College
Approximating TSP Solution by MST based Graph Pyramid
 Approximating TSP Solution by MST based Graph Pyramid Y. Haxhimusa 1,2, W. G. Kropatsch 2, Z. Pizlo 1, A. Ion 2 and A. Lehrbaum 2 1 Department of Psychological Sciences, Purdue University 2 PRIP, Vienna
Approximating TSP Solution by MST based Graph Pyramid Y. Haxhimusa 1,2, W. G. Kropatsch 2, Z. Pizlo 1, A. Ion 2 and A. Lehrbaum 2 1 Department of Psychological Sciences, Purdue University 2 PRIP, Vienna
Medical images, segmentation and analysis
 Medical images, segmentation and analysis ImageLab group http://imagelab.ing.unimo.it Università degli Studi di Modena e Reggio Emilia Medical Images Macroscopic Dermoscopic ELM enhance the features of
Medical images, segmentation and analysis ImageLab group http://imagelab.ing.unimo.it Università degli Studi di Modena e Reggio Emilia Medical Images Macroscopic Dermoscopic ELM enhance the features of
3 October, 2013 MVA ENS Cachan. Lecture 2: Logistic regression & intro to MIL Iasonas Kokkinos
 Machine Learning for Computer Vision 1 3 October, 2013 MVA ENS Cachan Lecture 2: Logistic regression & intro to MIL Iasonas Kokkinos Iasonas.kokkinos@ecp.fr Department of Applied Mathematics Ecole Centrale
Machine Learning for Computer Vision 1 3 October, 2013 MVA ENS Cachan Lecture 2: Logistic regression & intro to MIL Iasonas Kokkinos Iasonas.kokkinos@ecp.fr Department of Applied Mathematics Ecole Centrale
coding of various parts showing different features, the possibility of rotation or of hiding covering parts of the object's surface to gain an insight
 Three-Dimensional Object Reconstruction from Layered Spatial Data Michael Dangl and Robert Sablatnig Vienna University of Technology, Institute of Computer Aided Automation, Pattern Recognition and Image
Three-Dimensional Object Reconstruction from Layered Spatial Data Michael Dangl and Robert Sablatnig Vienna University of Technology, Institute of Computer Aided Automation, Pattern Recognition and Image
Lecture 16 Segmentation and Scene understanding
 Lecture 16 Segmentation and Scene understanding Introduction! Mean-shift! Graph-based segmentation! Top-down segmentation! Silvio Savarese Lecture 15 -! 3-Mar-14 Segmentation Silvio Savarese Lecture 15
Lecture 16 Segmentation and Scene understanding Introduction! Mean-shift! Graph-based segmentation! Top-down segmentation! Silvio Savarese Lecture 15 -! 3-Mar-14 Segmentation Silvio Savarese Lecture 15
Analysis: TextonBoost and Semantic Texton Forests. Daniel Munoz Februrary 9, 2009
 Analysis: TextonBoost and Semantic Texton Forests Daniel Munoz 16-721 Februrary 9, 2009 Papers [shotton-eccv-06] J. Shotton, J. Winn, C. Rother, A. Criminisi, TextonBoost: Joint Appearance, Shape and Context
Analysis: TextonBoost and Semantic Texton Forests Daniel Munoz 16-721 Februrary 9, 2009 Papers [shotton-eccv-06] J. Shotton, J. Winn, C. Rother, A. Criminisi, TextonBoost: Joint Appearance, Shape and Context
Figure-Ground Segmentation Techniques
 Figure-Ground Segmentation Techniques Snehal P. Ambulkar 1, Nikhil S. Sakhare 2 1 2 nd Year Student, Master of Technology, Computer Science & Engineering, Rajiv Gandhi College of Engineering & Research,
Figure-Ground Segmentation Techniques Snehal P. Ambulkar 1, Nikhil S. Sakhare 2 1 2 nd Year Student, Master of Technology, Computer Science & Engineering, Rajiv Gandhi College of Engineering & Research,
3D Computer Vision. Structured Light II. Prof. Didier Stricker. Kaiserlautern University.
 3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
Integrating Intensity and Texture in Markov Random Fields Segmentation. Amer Dawoud and Anton Netchaev. {amer.dawoud*,
 Integrating Intensity and Texture in Markov Random Fields Segmentation Amer Dawoud and Anton Netchaev {amer.dawoud*, anton.netchaev}@usm.edu School of Computing, University of Southern Mississippi 118
Integrating Intensity and Texture in Markov Random Fields Segmentation Amer Dawoud and Anton Netchaev {amer.dawoud*, anton.netchaev}@usm.edu School of Computing, University of Southern Mississippi 118
Ensemble Combination for Solving the Parameter Selection Problem in Image Segmentation
 Ensemble Combination for Solving the Parameter Selection Problem in Image Segmentation Pakaket Wattuya and Xiaoyi Jiang Department of Mathematics and Computer Science University of Münster, Germany {wattuya,xjiang}@math.uni-muenster.de
Ensemble Combination for Solving the Parameter Selection Problem in Image Segmentation Pakaket Wattuya and Xiaoyi Jiang Department of Mathematics and Computer Science University of Münster, Germany {wattuya,xjiang}@math.uni-muenster.de
Image Segmentation. Ross Whitaker SCI Institute, School of Computing University of Utah
 Image Segmentation Ross Whitaker SCI Institute, School of Computing University of Utah What is Segmentation? Partitioning images/volumes into meaningful pieces Partitioning problem Labels Isolating a specific
Image Segmentation Ross Whitaker SCI Institute, School of Computing University of Utah What is Segmentation? Partitioning images/volumes into meaningful pieces Partitioning problem Labels Isolating a specific
A Robust and Efficient Motion Segmentation Based on Orthogonal Projection Matrix of Shape Space
 A Robust and Efficient Motion Segmentation Based on Orthogonal Projection Matrix of Shape Space Naoyuki ICHIMURA Electrotechnical Laboratory 1-1-4, Umezono, Tsukuba Ibaraki, 35-8568 Japan ichimura@etl.go.jp
A Robust and Efficient Motion Segmentation Based on Orthogonal Projection Matrix of Shape Space Naoyuki ICHIMURA Electrotechnical Laboratory 1-1-4, Umezono, Tsukuba Ibaraki, 35-8568 Japan ichimura@etl.go.jp
An Edge-Based Approach to Motion Detection*
 An Edge-Based Approach to Motion Detection* Angel D. Sappa and Fadi Dornaika Computer Vison Center Edifici O Campus UAB 08193 Barcelona, Spain {sappa, dornaika}@cvc.uab.es Abstract. This paper presents
An Edge-Based Approach to Motion Detection* Angel D. Sappa and Fadi Dornaika Computer Vison Center Edifici O Campus UAB 08193 Barcelona, Spain {sappa, dornaika}@cvc.uab.es Abstract. This paper presents
Fully Automatic Methodology for Human Action Recognition Incorporating Dynamic Information
 Fully Automatic Methodology for Human Action Recognition Incorporating Dynamic Information Ana González, Marcos Ortega Hortas, and Manuel G. Penedo University of A Coruña, VARPA group, A Coruña 15071,
Fully Automatic Methodology for Human Action Recognition Incorporating Dynamic Information Ana González, Marcos Ortega Hortas, and Manuel G. Penedo University of A Coruña, VARPA group, A Coruña 15071,
Content-based Image and Video Retrieval. Image Segmentation
 Content-based Image and Video Retrieval Vorlesung, SS 2011 Image Segmentation 2.5.2011 / 9.5.2011 Image Segmentation One of the key problem in computer vision Identification of homogenous region in the
Content-based Image and Video Retrieval Vorlesung, SS 2011 Image Segmentation 2.5.2011 / 9.5.2011 Image Segmentation One of the key problem in computer vision Identification of homogenous region in the
TEVI: Text Extraction for Video Indexing
 TEVI: Text Extraction for Video Indexing Hichem KARRAY, Mohamed SALAH, Adel M. ALIMI REGIM: Research Group on Intelligent Machines, EIS, University of Sfax, Tunisia hichem.karray@ieee.org mohamed_salah@laposte.net
TEVI: Text Extraction for Video Indexing Hichem KARRAY, Mohamed SALAH, Adel M. ALIMI REGIM: Research Group on Intelligent Machines, EIS, University of Sfax, Tunisia hichem.karray@ieee.org mohamed_salah@laposte.net
Detecting Salient Contours Using Orientation Energy Distribution. Part I: Thresholding Based on. Response Distribution
 Detecting Salient Contours Using Orientation Energy Distribution The Problem: How Does the Visual System Detect Salient Contours? CPSC 636 Slide12, Spring 212 Yoonsuck Choe Co-work with S. Sarma and H.-C.
Detecting Salient Contours Using Orientation Energy Distribution The Problem: How Does the Visual System Detect Salient Contours? CPSC 636 Slide12, Spring 212 Yoonsuck Choe Co-work with S. Sarma and H.-C.
Image Segmentation. Srikumar Ramalingam School of Computing University of Utah. Slides borrowed from Ross Whitaker
 Image Segmentation Srikumar Ramalingam School of Computing University of Utah Slides borrowed from Ross Whitaker Segmentation Semantic Segmentation Indoor layout estimation What is Segmentation? Partitioning
Image Segmentation Srikumar Ramalingam School of Computing University of Utah Slides borrowed from Ross Whitaker Segmentation Semantic Segmentation Indoor layout estimation What is Segmentation? Partitioning
Robust Zero Watermarking for Still and Similar Images Using a Learning Based Contour Detection
 Robust Zero Watermarking for Still and Similar Images Using a Learning Based Contour Detection Shahryar Ehsaee and Mansour Jamzad (&) Department of Computer Engineering, Sharif University of Technology,
Robust Zero Watermarking for Still and Similar Images Using a Learning Based Contour Detection Shahryar Ehsaee and Mansour Jamzad (&) Department of Computer Engineering, Sharif University of Technology,
Recognition-based Segmentation of Nom Characters from Body Text Regions of Stele Images Using Area Voronoi Diagram
 Author manuscript, published in "International Conference on Computer Analysis of Images and Patterns - CAIP'2009 5702 (2009) 205-212" DOI : 10.1007/978-3-642-03767-2 Recognition-based Segmentation of
Author manuscript, published in "International Conference on Computer Analysis of Images and Patterns - CAIP'2009 5702 (2009) 205-212" DOI : 10.1007/978-3-642-03767-2 Recognition-based Segmentation of
From Ramp Discontinuities to Segmentation Tree
 From Ramp Discontinuities to Segmentation Tree Emre Akbas and Narendra Ahuja Beckman Institute for Advanced Science and Technology University of Illinois at Urbana-Champaign Abstract. This paper presents
From Ramp Discontinuities to Segmentation Tree Emre Akbas and Narendra Ahuja Beckman Institute for Advanced Science and Technology University of Illinois at Urbana-Champaign Abstract. This paper presents
Perception. Autonomous Mobile Robots. Sensors Vision Uncertainties, Line extraction from laser scans. Autonomous Systems Lab. Zürich.
 Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Perception Sensors Vision Uncertainties, Line extraction
Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Perception Sensors Vision Uncertainties, Line extraction
A Simplified Texture Gradient Method for Improved Image Segmentation
 A Simplified Texture Gradient Method for Improved Image Segmentation Qi Wang & M. W. Spratling Department of Informatics, King s College London, London, WC2R 2LS qi.1.wang@kcl.ac.uk Michael.Spratling@kcl.ac.uk
A Simplified Texture Gradient Method for Improved Image Segmentation Qi Wang & M. W. Spratling Department of Informatics, King s College London, London, WC2R 2LS qi.1.wang@kcl.ac.uk Michael.Spratling@kcl.ac.uk
Texture Analysis of Painted Strokes 1) Martin Lettner, Paul Kammerer, Robert Sablatnig
 Martin Lettner, Paul Kammerer, Robert Sablatnig") Texture Analysis of Painted Strokes 1) Martin Lettner, Paul Kammerer, Robert Sablatnig Vienna University of Technology, Institute of Computer Aided Automation, Pattern Recognition and Image Processing
Texture Analysis of Painted Strokes 1) Martin Lettner, Paul Kammerer, Robert Sablatnig Vienna University of Technology, Institute of Computer Aided Automation, Pattern Recognition and Image Processing
DIGITAL IMAGE ANALYSIS. Image Classification: Object-based Classification
 DIGITAL IMAGE ANALYSIS Image Classification: Object-based Classification Image classification Quantitative analysis used to automate the identification of features Spectral pattern recognition Unsupervised
DIGITAL IMAGE ANALYSIS Image Classification: Object-based Classification Image classification Quantitative analysis used to automate the identification of features Spectral pattern recognition Unsupervised
Lecture 6: Edge Detection
 #1 Lecture 6: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Options for Image Representation Introduced the concept of different representation or transformation Fourier Transform
#1 Lecture 6: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Options for Image Representation Introduced the concept of different representation or transformation Fourier Transform
Part III: Affinity Functions for Image Segmentation
 Part III: Affinity Functions for Image Segmentation Charless Fowlkes joint work with David Martin and Jitendra Malik at University of California at Berkeley 1 Q: What measurements should we use for constructing
Part III: Affinity Functions for Image Segmentation Charless Fowlkes joint work with David Martin and Jitendra Malik at University of California at Berkeley 1 Q: What measurements should we use for constructing
Image Processing and Image Analysis VU
 Image Processing and Image Analysis 052617 VU Yll Haxhimusa yll.haxhimusa@medunwien.ac.at vda.univie.ac.at/teaching/ipa/17w/ Outline What are grouping problems in vision? Inspiration from human perception
Image Processing and Image Analysis 052617 VU Yll Haxhimusa yll.haxhimusa@medunwien.ac.at vda.univie.ac.at/teaching/ipa/17w/ Outline What are grouping problems in vision? Inspiration from human perception
Multi-scale Techniques for Document Page Segmentation
 Multi-scale Techniques for Document Page Segmentation Zhixin Shi and Venu Govindaraju Center of Excellence for Document Analysis and Recognition (CEDAR), State University of New York at Buffalo, Amherst
Multi-scale Techniques for Document Page Segmentation Zhixin Shi and Venu Govindaraju Center of Excellence for Document Analysis and Recognition (CEDAR), State University of New York at Buffalo, Amherst
CIS UDEL Working Notes on ImageCLEF 2015: Compound figure detection task
 CIS UDEL Working Notes on ImageCLEF 2015: Compound figure detection task Xiaolong Wang, Xiangying Jiang, Abhishek Kolagunda, Hagit Shatkay and Chandra Kambhamettu Department of Computer and Information
CIS UDEL Working Notes on ImageCLEF 2015: Compound figure detection task Xiaolong Wang, Xiangying Jiang, Abhishek Kolagunda, Hagit Shatkay and Chandra Kambhamettu Department of Computer and Information
Storage Efficient NL-Means Burst Denoising for Programmable Cameras
 Storage Efficient NL-Means Burst Denoising for Programmable Cameras Brendan Duncan Stanford University brendand@stanford.edu Miroslav Kukla Stanford University mkukla@stanford.edu Abstract An effective
Storage Efficient NL-Means Burst Denoising for Programmable Cameras Brendan Duncan Stanford University brendand@stanford.edu Miroslav Kukla Stanford University mkukla@stanford.edu Abstract An effective
Image Segmentation Based on Watershed and Edge Detection Techniques
 0 The International Arab Journal of Information Technology, Vol., No., April 00 Image Segmentation Based on Watershed and Edge Detection Techniques Nassir Salman Computer Science Department, Zarqa Private
0 The International Arab Journal of Information Technology, Vol., No., April 00 Image Segmentation Based on Watershed and Edge Detection Techniques Nassir Salman Computer Science Department, Zarqa Private