Image Analysis & Retrieval Lec 12 - Mid-Term Review
|
|
|
- Miles White
- 5 years ago
- Views:
Transcription


1 CS/EE 5590 / ENG 401 Special Topics, Spring 2018 Image Analysis & Retrieval Lec 12 - Mid-Term Review Zhu Li Dept of CSEE, UMKC Office Hour: Tue/Thr 2:30-4pm@FH560E, Contact: lizhu@umkc.edu, Ph: x Created using WPS office and EqualX latex equation editor p.1
2 q HW-2 q Quiz-1 Outline q Review part I: Image Features & Classifiers Image Formation: Homography Color Space & Color Features Filtering and Edge Features Harris Detector SIFT Aggregation: BoW, VLAD, Fisher, and Supervector Image Retrieval System Metrics: TPR/Precision, FPR, Recall, map Classification: knn, GMM Bayesian, SVM p.2
3 qdata Set: CDVS data set Homework-2: Aggregation q Global Codebook for VLAD, FisherVector Compute SIFT and DenseSIFT from each image, sort them into two arrays: hw2_sift: hw2_dsift Random sample a subset of them: use randperm() Compute PCA: o indx = randperm(n_sift); indx = indx(1:20*2^10); % sample 20k o [A0, s, eigv]=princomp(hw2_sift(indx,: )); Project SIFT o Dimension reduction: x = sift*a0(:,1:kd) Compute Kmeans and GMM models for VLAD and FV aggregation: o vl_feat: vl_kmeans(), vl_gmm(); p.3



4 Fisher Vector Aggregation q FV encoding Gradient on the mean, for GMM component k, j=1..d In the end, we have 2K x D aggregation on the derivation w.r.t. the means and variances Normalize by Fisher Kernel p.4
5 Quiz-1 q Covers what we reviewed today q Format: True or False Multiple Choices Problem Solving Extra Credit (25%) q Close Book, 1-page A4 cheating sheet allowed. cheating sheet need to be turned in with name and id number cheating sheet will also be graded for up to 10 pts q Relax J Quiz is actually on me. p.5

6 Best Cheating Sheet Award from 2017 J q Cheating sheet is also graded. Up to 10 pts extra A nice way to summarize and organize/indexing your knowledge base. Cheating sheet + HW = what you really get from the class. p.6
7 q HW-2 q Quiz-1 Outline q Review part I: Image Features & Classifiers Image Formation: Homography Color Space & Color Features Filtering and Edge Features Harris Detector SIFT Aggregation: BoW, VLAD, Fisher, and Supervector Image Retrieval System Metrics: TPR/Precision, FPR, Recall, map Classification: knn, GMM Bayesian, SVM p.7
8 Classification in Image Retrieval q An image retrieval pipeline (hand crafted features) Image Formatio n Feature Computing Feature Aggregation Classificatio n Homography, Color space Color histogram Filtering, Edge Detection HoG, Harris Detector, SIFT Bow VLAD Fisher Vector Supervector Knowledge /Data Base p.8
9 Image Formation - Geometry p.9 [ ] X 0 x = K I ú ú ú ú û ù ê ê ê ê ë é ú ú ú û ù ê ê ê ë é = ú ú ú û ù ê ê ê ë é z y x f f v u w K Slide Credit: GaTech Computer Vision class, Intrinsic Assumptions Unit aspect ratio Optical center at (0,0) No skew of pixels Extrinsic Assumptions No rotation Camera at (0,0,0) X x
![Image Formation: Homography q In general, homography H maps 2d points according to, x =Hx Up to a scale, as [x, y, w]=[sx, sy, sw], so H has 8 DoF qaffine](/docs-images/84/91191253/images/10-3.jpg "Transform: 6 DoF: Contains a translation [t 1, t 2 ], and invertable affine matrix A [2x2] qsimilarity Transform, 4 DoF: a rigid transform that preserves distance")
10 Image Formation: Homography q In general, homography H maps 2d points according to, x =Hx Up to a scale, as [x, y, w]=[sx, sy, sw], so H has 8 DoF qaffine Transform: 6 DoF: Contains a translation [t 1, t 2 ], and invertable affine matrix A [2x2] qsimilarity Transform, 4 DoF: a rigid transform that preserves distance if s=1: p.10

11 VL_FEAT Implementation q VL_FEAT has an implementation: p.11


12 Image Formation Color Space q RGB Color Space: 8 bit Red, Green, Blue Channels Mixed together q YUV/YCbCr Color Space q HSV Color Space Hue: color in polar coord Saturation Value p.12
13 Color Histogram Fixed Codebook q Color Histogram: Fixed code book to generate histogram Example: MPEG 7 Scalable Color Descriptor HSV Color Space, 16x4x4 partition for bins Scalability thru quantization and Haar Transform p.13

14 Color Histogram Adaptive Codebook qadaptive Color Histogram No fixed code book Example: MPEG 7 Dominant Color Descriptor Distance Metric Not index-able p.14


15 q Basic Filter Operations Image Filters 1/9 1/9 1 1/9 1 1/9 1 1/9 1 1/9 1 * 1/9 1 1/9 1 1/9 1 qregion of Support p.15
16 Filter Properties qlinear Filters are: Shift-Invariant: f(m-k, n-j)*h = g(m-k, n-j), if f*h=g Associative: f*h 1 *h 2 = f*(h 1 *h 2 ) this can save a lot of complexity Distributive: f*h1 + f*h2 = f*(h1+h2) useful in SIFT s DoG filtering. p.16
")
17 Edge Detection q The need of smoothing Gaussian smoothing Combine differentiation and Gaussian derivative of Gaussian (x) f p.17
18 Image Gradient from DoG Filtering qimage Gradient (at a scale): The gradient points in the direction of most rapid increase in intensity The edge strength is given by the gradient magnitude: The gradient direction is given by: p.18

19 HOG Histogram of Oriented Gradients q Generate local histogram per block Size of HoG: n*m*4*9=36nm, for n x m cells. f = ( h,..., h, h,..., h, h,..., h, h h ) ,..., 9 Angle Magnitude HOG Cell size 5 Binary voting Magnitude voting p.19

 2 é I x ( s D ) m s")
 ( 2 I ù xi y ( s D ) ú I")


 g(i x I y ) 4.")

]-a[trace( m( s, s )) ] = I D g")
20 Harris Detector qsmoothed 2 nd moment: 1. Image derivatives (optionally blur first) 2 é I x ( s D ) m s I, s D ) = g( s I ) * ê êë I xi y ( s D ) ( 2 I ù xi y ( s D ) ú I y ( s D ) úû I x I y det M trace M = l l 1 2 = l + l Square of derivatives I x 2 I y 2 I x I y 3. Gaussian filter g(s I ) g(i x 2) g(i y 2) g(i x I y ) 4. Harris Function detect corners, no need to compute the eigen values Rharris 2 = det[ m( s, s )]-a[trace( m( s, s )) ] = I D g ( I x ) g( I y ) -[ g( I xi y )] -a[ g( I x ) g( I y I D )] 2 har p.20


 p.")
21 Harris Detector Steps q Response function -> Threshold -> Local Maxima Harris Detector NOT scale invariant R(x,y) p.21


22 Scale Space Theory - Lindeberg Ñ 2 g = 2 g 2 x + 2 g 2 y r image characteristic scale p.22

23 SIFT Detector via Difference of Gaussian q However, LoG computing is expensive nonseperatable filter q SIFT: uses Difference of Gaussian filters to approximate LoG Separate-able, much faster Box Filter Approximation you will see later. LoG Scale space construction By Gaussian Filtering, and Image Difference p.23


24 Peak Strength & Edge Removal q Peak Strength: Interpolate true DoG response and pixel location by Taylor expansion q Edge Removal: Re-do Harris type detection to remove edge on much reduced pixel set p.24


25 Scale Invariance thru Dominant Orientation Coding q Voting for the dominant orientation Weighted by a Gaussian window to give more emphasis to the gradients closer to the center p.25
 around SIFT point into 4x4 Cells q For")

26 SIFT Description q Rotate to dominant direction, divide Image Patch (16x16 pixels) around SIFT point into 4x4 Cells q For each cell, compute an 8-bin edge histogram 0 2p angle histogram Spatial-scale space extrema qoverall, we have 4x4x8=128 dimension p.26

 Combined scale/peak strength pmf p.27")
27 SIFT Matching and Repeatability Prediction q SIFT Distance True Love Test qnot all SIFT are created equal Peak strength (DoG response at interpolated position) Combined scale/peak strength pmf p.27
28 q HW-2 q Quiz-1 Outline q Review part I: Image Features & Classifiers Image Formation: Homography Color Space & Color Features Filtering and Edge Features Harris Detector SIFT Aggregation: BoW, VLAD, Fisher, and Supervector Image Retrieval System Metrics: TPR/Precision, FPR, Recall, map Classification: knn, GMM Bayesian, SVM p.28




29 q Curse of Dimensionality Why Aggregation? + qdecision Boundary / Indexing p.29

30 Histogram Aggregation: Bag-of-Words k n p.30



31 Histogram Aggregation: Kernel Code Book Soft Encoding p.31

32 VLAD- Vector of Locally Aggregated Descriptors 1 assign descriptors m 1 m 2 m 4 m 3 x m 5 2 compute x- m i 3 v i =sum x- m i for cell i v 1 v 2 v 3 v 4 v 5 p.32
33 Fisher Vector Aggregation q FV encoding Gradient on the mean, for GMM component k, j=1..d In the end, we have 2K x D aggregation on the derivation w.r.t. the means and variances Normalize by Fisher Kernel p.33
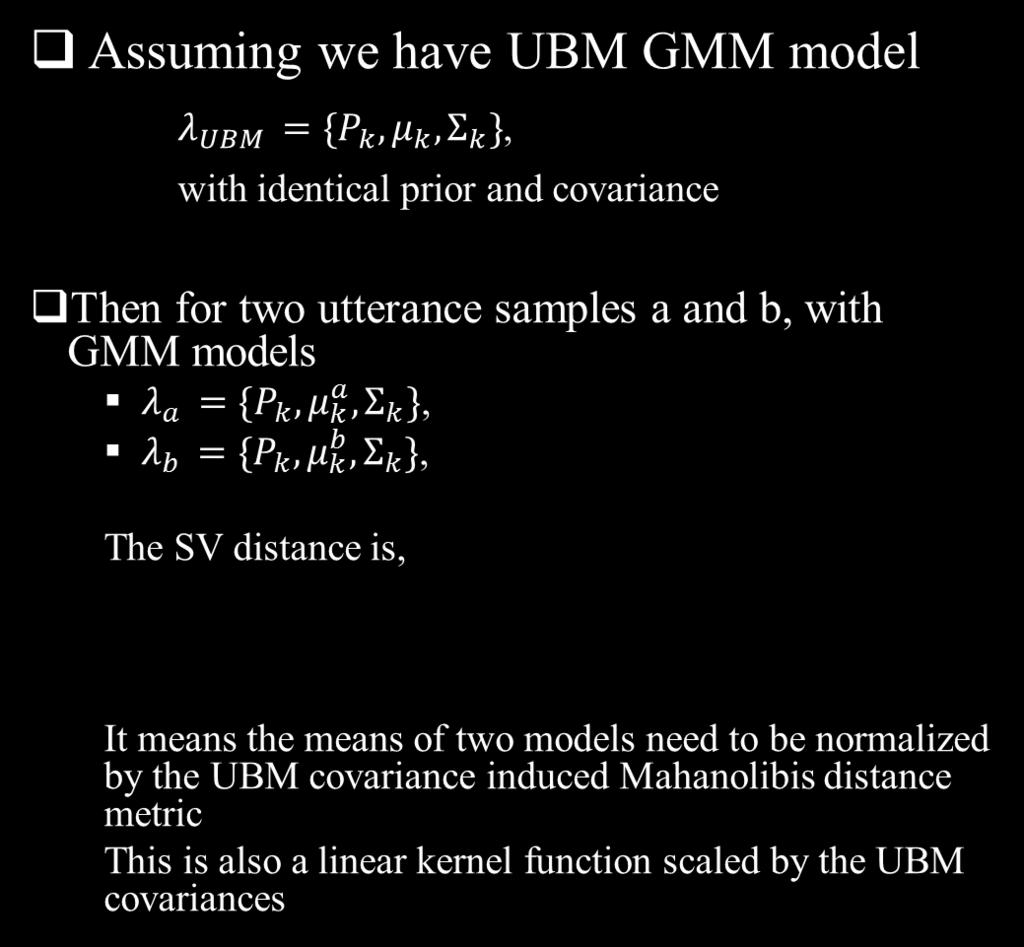

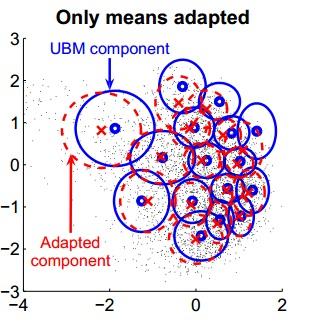
34 Supervector Aggregation p.34


35 AKULA Adaptive KLUster Aggregation qakula Descriptor: No fixed codebook! Outer loop: subspace optimization Inner loop: cluster centroids + SIFT count A 1 ={yc 1 1, yc 1 2,, yc 1 k ; pc 1 1, pc 1 2,, pc 1 k } A 2 ={yc 2 1, yc 2 2,, yc 2 k ; pc 2 1, pc 2 2,, pc 2 k } qdistance metric: Min centroids distance, weighted by SIFT count (kind of manifolds tangent distance) p.35
36 Image Retrieval Performance Metrics q True Positive Rate q False Positive Rate qprecision qrecall qf-measure TPR = TP/(TP+FP) FPR = FP/(TP+FP) Precision =TP/(TP + FP), Recall = TP/(TP + FN) F-measure = 2*(precision*recall)/(precision + recall) p.36
37 Retrieval Performance: Mean Average Precision qmap measures the retrieval performance across all queries p.37
38 map example q MAP is computed across all query results as the average precision over the recall p.38


39 Compute TPR-FPR q ROC Curve (Receiver Operating Characteristics) Confusion/distance matrix: d(j,k) Ground Truth: m(j,k) p.39


40 Classification in Image Retrieval q A typical image retrieval pipeline Image Formatio n Feature Computing Feature Aggregation Classificatio n Knowledge /Data Base p.40

41 q knn is Nonlinear Classifier Operations: majority vote knn Classifier qperformance bounds on k: not worse off by 2 times the error rate of Bayesian error rate As k increases, it improves, but not much qaccelerate NN retrieval operation Kd-tree: o a space partition scheme, to limit the number of data points comparison operation Kd-tree supported knn search: o Approx KNN search o Kd-Forest supported Approx Search p.41
; Method = quadratic p.")
42 Gaussian Generative Model Classifier q Shaped by the relative shape of Covariance Matrix q Matlab: [rec_label, err]=classify(q, x, y, method); Method = quadratic p.42
43 q Why called SVM? The Support Vector Solution K(x i, x) p.43
44 Support Vector Machine qmatlab: % train svm svm = svmtrain(x, y, 'showplot', true); % svm classification for k=1:5 figure(41); hold on; grid on; axis([ ]); [u,v]=ginput(1); q=[u,v]; plot(u, v, '*b'); rec = svmclassify(svm, q); fprintf('\n recognized as %c', rec); end p.44
45 Summary q Image Analysis & Retrieval Part I Image Formation Color and Texture Features Interest Points Detection Harris Detector Invariant Interest Point Detection SIFT Aggregation Classification tools: knn, gmm, svm Performance metrics: o tp, fp, tn, fn, tpr/precision, fpr, recall, map q Part II: Holistic approach Just throw the pixels to the algorithm to figure out what are the good features. Subspace approach: Eigenface, Fisherface, Laplacian Embedding Deep Learning: CNN Hashing p.45
Lec 08 Feature Aggregation II: Fisher Vector, Super Vector and AKULA
 Image Analysis & Retrieval CS/EE 5590 Special Topics (Class Ids: 44873, 44874) Fall 2016, M/W 4-5:15pm@Bloch 0012 Lec 08 Feature Aggregation II: Fisher Vector, Super Vector and AKULA Zhu Li Dept of CSEE,
Image Analysis & Retrieval CS/EE 5590 Special Topics (Class Ids: 44873, 44874) Fall 2016, M/W 4-5:15pm@Bloch 0012 Lec 08 Feature Aggregation II: Fisher Vector, Super Vector and AKULA Zhu Li Dept of CSEE,
Image Analysis & Retrieval. CS/EE 5590 Special Topics (Class Ids: 44873, 44874) Fall 2016, M/W Lec 13
 Fall 2016, M/W Lec 13") Image Analysis & Retrieval CS/EE 5590 Special Topics (Class Ids: 44873, 44874) Fall 2016, M/W 4-5:15pm@Bloch 0012 Lec 13 Dimension Reduction: SVD and PCA Zhu Li Dept of CSEE, UMKC Office: FH560E, Email:
Image Analysis & Retrieval CS/EE 5590 Special Topics (Class Ids: 44873, 44874) Fall 2016, M/W 4-5:15pm@Bloch 0012 Lec 13 Dimension Reduction: SVD and PCA Zhu Li Dept of CSEE, UMKC Office: FH560E, Email:
Image Analysis & Retrieval Lec 10 - Classification II
 CS/EE 5590 / ENG 401 Special Topics, Spring 2018 Image Analysis & Retrieval Lec 10 - Classification II Zhu Li Dept of CSEE, UMKC http://l.web.umkc.edu/lizhu Office Hour: Tue/Thr 2:30-4pm@FH560E, Contact:
CS/EE 5590 / ENG 401 Special Topics, Spring 2018 Image Analysis & Retrieval Lec 10 - Classification II Zhu Li Dept of CSEE, UMKC http://l.web.umkc.edu/lizhu Office Hour: Tue/Thr 2:30-4pm@FH560E, Contact:
Outline 7/2/201011/6/
 Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
ECE 484 Digital Image Processing Lec 12 - Mid Term Review
 ECE 484 Digital Image Processing Lec 12 - Mid Term Review Zhu Li Dept of CSEE, UMKC Office: FH560E, Email: lizhu@umkc.edu, Ph: x 2346. http://l.web.umkc.edu/lizhu slides created with WPS Office Linux and
ECE 484 Digital Image Processing Lec 12 - Mid Term Review Zhu Li Dept of CSEE, UMKC Office: FH560E, Email: lizhu@umkc.edu, Ph: x 2346. http://l.web.umkc.edu/lizhu slides created with WPS Office Linux and
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014
 SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
Scale Invariant Feature Transform
 Scale Invariant Feature Transform Why do we care about matching features? Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Image
Scale Invariant Feature Transform Why do we care about matching features? Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Image
Feature descriptors. Alain Pagani Prof. Didier Stricker. Computer Vision: Object and People Tracking
 Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Scale Invariant Feature Transform
 Why do we care about matching features? Scale Invariant Feature Transform Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Automatic
Why do we care about matching features? Scale Invariant Feature Transform Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Automatic
Adaptive Learning of an Accurate Skin-Color Model
 Adaptive Learning of an Accurate Skin-Color Model Q. Zhu K.T. Cheng C. T. Wu Y. L. Wu Electrical & Computer Engineering University of California, Santa Barbara Presented by: H.T Wang Outline Generic Skin
Adaptive Learning of an Accurate Skin-Color Model Q. Zhu K.T. Cheng C. T. Wu Y. L. Wu Electrical & Computer Engineering University of California, Santa Barbara Presented by: H.T Wang Outline Generic Skin
Motion illusion, rotating snakes
 Motion illusion, rotating snakes Local features: main components 1) Detection: Find a set of distinctive key points. 2) Description: Extract feature descriptor around each interest point as vector. x 1
Motion illusion, rotating snakes Local features: main components 1) Detection: Find a set of distinctive key points. 2) Description: Extract feature descriptor around each interest point as vector. x 1
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.
 CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Section 10 - Detectors part II Descriptors Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Section 10 - Detectors part II Descriptors Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering
Motion Estimation and Optical Flow Tracking
 Image Matching Image Retrieval Object Recognition Motion Estimation and Optical Flow Tracking Example: Mosiacing (Panorama) M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 Example 3D Reconstruction
Image Matching Image Retrieval Object Recognition Motion Estimation and Optical Flow Tracking Example: Mosiacing (Panorama) M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 Example 3D Reconstruction
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 09 130219 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Feature Descriptors Feature Matching Feature
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 09 130219 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Feature Descriptors Feature Matching Feature
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 10 130221 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Canny Edge Detector Hough Transform Feature-Based
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 10 130221 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Canny Edge Detector Hough Transform Feature-Based
Mixtures of Gaussians and Advanced Feature Encoding
 Mixtures of Gaussians and Advanced Feature Encoding Computer Vision Ali Borji UWM Many slides from James Hayes, Derek Hoiem, Florent Perronnin, and Hervé Why do good recognition systems go bad? E.g. Why
Mixtures of Gaussians and Advanced Feature Encoding Computer Vision Ali Borji UWM Many slides from James Hayes, Derek Hoiem, Florent Perronnin, and Hervé Why do good recognition systems go bad? E.g. Why
Prof. Feng Liu. Spring /26/2017
 Prof. Feng Liu Spring 2017 http://www.cs.pdx.edu/~fliu/courses/cs510/ 04/26/2017 Last Time Re-lighting HDR 2 Today Panorama Overview Feature detection Mid-term project presentation Not real mid-term 6
Prof. Feng Liu Spring 2017 http://www.cs.pdx.edu/~fliu/courses/cs510/ 04/26/2017 Last Time Re-lighting HDR 2 Today Panorama Overview Feature detection Mid-term project presentation Not real mid-term 6
CS 4495 Computer Vision A. Bobick. CS 4495 Computer Vision. Features 2 SIFT descriptor. Aaron Bobick School of Interactive Computing
 CS 4495 Computer Vision Features 2 SIFT descriptor Aaron Bobick School of Interactive Computing Administrivia PS 3: Out due Oct 6 th. Features recap: Goal is to find corresponding locations in two images.
CS 4495 Computer Vision Features 2 SIFT descriptor Aaron Bobick School of Interactive Computing Administrivia PS 3: Out due Oct 6 th. Features recap: Goal is to find corresponding locations in two images.
Augmented Reality VU. Computer Vision 3D Registration (2) Prof. Vincent Lepetit
 Prof. Vincent Lepetit") Augmented Reality VU Computer Vision 3D Registration (2) Prof. Vincent Lepetit Feature Point-Based 3D Tracking Feature Points for 3D Tracking Much less ambiguous than edges; Point-to-point reprojection
Augmented Reality VU Computer Vision 3D Registration (2) Prof. Vincent Lepetit Feature Point-Based 3D Tracking Feature Points for 3D Tracking Much less ambiguous than edges; Point-to-point reprojection
Introduction. Introduction. Related Research. SIFT method. SIFT method. Distinctive Image Features from Scale-Invariant. Scale.
 Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe presented by, Sudheendra Invariance Intensity Scale Rotation Affine View point Introduction Introduction SIFT (Scale Invariant Feature
Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe presented by, Sudheendra Invariance Intensity Scale Rotation Affine View point Introduction Introduction SIFT (Scale Invariant Feature
ECE 484 Digital Image Processing Lec 17 - Part II Review & Final Projects Topics
 ECE 484 Digital Image Processing Lec 17 - Part II Review & Final Projects opics Zhu Li Dept of CSEE, UMKC Office: FH560E, Email: lizhu@umkc.edu, Ph: x 2346. http://l.web.umkc.edu/lizhu slides created with
ECE 484 Digital Image Processing Lec 17 - Part II Review & Final Projects opics Zhu Li Dept of CSEE, UMKC Office: FH560E, Email: lizhu@umkc.edu, Ph: x 2346. http://l.web.umkc.edu/lizhu slides created with
Feature Descriptors. CS 510 Lecture #21 April 29 th, 2013
 Feature Descriptors CS 510 Lecture #21 April 29 th, 2013 Programming Assignment #4 Due two weeks from today Any questions? How is it going? Where are we? We have two umbrella schemes for object recognition
Feature Descriptors CS 510 Lecture #21 April 29 th, 2013 Programming Assignment #4 Due two weeks from today Any questions? How is it going? Where are we? We have two umbrella schemes for object recognition
Local Image Features
 Local Image Features Computer Vision Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Flashed Face Distortion 2nd Place in the 8th Annual Best
Local Image Features Computer Vision Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Flashed Face Distortion 2nd Place in the 8th Annual Best
COSC160: Detection and Classification. Jeremy Bolton, PhD Assistant Teaching Professor
 COSC160: Detection and Classification Jeremy Bolton, PhD Assistant Teaching Professor Outline I. Problem I. Strategies II. Features for training III. Using spatial information? IV. Reducing dimensionality
COSC160: Detection and Classification Jeremy Bolton, PhD Assistant Teaching Professor Outline I. Problem I. Strategies II. Features for training III. Using spatial information? IV. Reducing dimensionality
Local Features: Detection, Description & Matching
 Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
Local Image Features
 Local Image Features Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial This section: correspondence and alignment
Local Image Features Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial This section: correspondence and alignment
2D Image Processing Feature Descriptors
 2D Image Processing Feature Descriptors Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Overview
2D Image Processing Feature Descriptors Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Overview
Computer vision: models, learning and inference. Chapter 13 Image preprocessing and feature extraction
 Computer vision: models, learning and inference Chapter 13 Image preprocessing and feature extraction Preprocessing The goal of pre-processing is to try to reduce unwanted variation in image due to lighting,
Computer vision: models, learning and inference Chapter 13 Image preprocessing and feature extraction Preprocessing The goal of pre-processing is to try to reduce unwanted variation in image due to lighting,
Feature descriptors and matching
 Feature descriptors and matching Detections at multiple scales Invariance of MOPS Intensity Scale Rotation Color and Lighting Out-of-plane rotation Out-of-plane rotation Better representation than color:
Feature descriptors and matching Detections at multiple scales Invariance of MOPS Intensity Scale Rotation Color and Lighting Out-of-plane rotation Out-of-plane rotation Better representation than color:
Features Points. Andrea Torsello DAIS Università Ca Foscari via Torino 155, Mestre (VE)
") Features Points Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Finding Corners Edge detectors perform poorly at corners. Corners provide repeatable points for matching, so
Features Points Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Finding Corners Edge detectors perform poorly at corners. Corners provide repeatable points for matching, so
Feature Based Registration - Image Alignment
 Feature Based Registration - Image Alignment Image Registration Image registration is the process of estimating an optimal transformation between two or more images. Many slides from Alexei Efros http://graphics.cs.cmu.edu/courses/15-463/2007_fall/463.html
Feature Based Registration - Image Alignment Image Registration Image registration is the process of estimating an optimal transformation between two or more images. Many slides from Alexei Efros http://graphics.cs.cmu.edu/courses/15-463/2007_fall/463.html
Image Analysis & Retrieval. CS/EE 5590 Special Topics (Class Ids: 44873, 44874) Fall 2016, M/W Lec 16
 Fall 2016, M/W Lec 16") Image Analysis & Retrieval CS/EE 5590 Special Topics (Class Ids: 44873, 44874) Fall 2016, M/W 4-5:15pm@Bloch 0012 Lec 16 Subspace/Transform Optimization Zhu Li Dept of CSEE, UMKC Office: FH560E, Email:
Image Analysis & Retrieval CS/EE 5590 Special Topics (Class Ids: 44873, 44874) Fall 2016, M/W 4-5:15pm@Bloch 0012 Lec 16 Subspace/Transform Optimization Zhu Li Dept of CSEE, UMKC Office: FH560E, Email:
Computer Vision I - Appearance-based Matching and Projective Geometry
 Computer Vision I - Appearance-based Matching and Projective Geometry Carsten Rother 05/11/2015 Computer Vision I: Image Formation Process Roadmap for next four lectures Computer Vision I: Image Formation
Computer Vision I - Appearance-based Matching and Projective Geometry Carsten Rother 05/11/2015 Computer Vision I: Image Formation Process Roadmap for next four lectures Computer Vision I: Image Formation
Harder case. Image matching. Even harder case. Harder still? by Diva Sian. by swashford
 Image matching Harder case by Diva Sian by Diva Sian by scgbt by swashford Even harder case Harder still? How the Afghan Girl was Identified by Her Iris Patterns Read the story NASA Mars Rover images Answer
Image matching Harder case by Diva Sian by Diva Sian by scgbt by swashford Even harder case Harder still? How the Afghan Girl was Identified by Her Iris Patterns Read the story NASA Mars Rover images Answer
Edge and corner detection
 Edge and corner detection Prof. Stricker Doz. G. Bleser Computer Vision: Object and People Tracking Goals Where is the information in an image? How is an object characterized? How can I find measurements
Edge and corner detection Prof. Stricker Doz. G. Bleser Computer Vision: Object and People Tracking Goals Where is the information in an image? How is an object characterized? How can I find measurements
Large-Scale Traffic Sign Recognition based on Local Features and Color Segmentation
 Large-Scale Traffic Sign Recognition based on Local Features and Color Segmentation M. Blauth, E. Kraft, F. Hirschenberger, M. Böhm Fraunhofer Institute for Industrial Mathematics, Fraunhofer-Platz 1,
Large-Scale Traffic Sign Recognition based on Local Features and Color Segmentation M. Blauth, E. Kraft, F. Hirschenberger, M. Böhm Fraunhofer Institute for Industrial Mathematics, Fraunhofer-Platz 1,
Anno accademico 2006/2007. Davide Migliore
 Robotica Anno accademico 6/7 Davide Migliore migliore@elet.polimi.it Today What is a feature? Some useful information The world of features: Detectors Edges detection Corners/Points detection Descriptors?!?!?
Robotica Anno accademico 6/7 Davide Migliore migliore@elet.polimi.it Today What is a feature? Some useful information The world of features: Detectors Edges detection Corners/Points detection Descriptors?!?!?
Harder case. Image matching. Even harder case. Harder still? by Diva Sian. by swashford
 Image matching Harder case by Diva Sian by Diva Sian by scgbt by swashford Even harder case Harder still? How the Afghan Girl was Identified by Her Iris Patterns Read the story NASA Mars Rover images Answer
Image matching Harder case by Diva Sian by Diva Sian by scgbt by swashford Even harder case Harder still? How the Afghan Girl was Identified by Her Iris Patterns Read the story NASA Mars Rover images Answer
Image Analysis & Retrieval. CS/EE 5590 Special Topics (Class Ids: 44873, 44874) Fall 2016, M/W Lec 18.
 Fall 2016, M/W Lec 18.") Image Analysis & Retrieval CS/EE 5590 Special Topics (Class Ids: 44873, 44874) Fall 2016, M/W 4-5:15pm@Bloch 0012 Lec 18 Image Hashing Zhu Li Dept of CSEE, UMKC Office: FH560E, Email: lizhu@umkc.edu, Ph:
Image Analysis & Retrieval CS/EE 5590 Special Topics (Class Ids: 44873, 44874) Fall 2016, M/W 4-5:15pm@Bloch 0012 Lec 18 Image Hashing Zhu Li Dept of CSEE, UMKC Office: FH560E, Email: lizhu@umkc.edu, Ph:
Scale Invariant Feature Transform by David Lowe
 Scale Invariant Feature Transform by David Lowe Presented by: Jerry Chen Achal Dave Vaishaal Shankar Some slides from Jason Clemons Motivation Image Matching Correspondence Problem Desirable Feature Characteristics
Scale Invariant Feature Transform by David Lowe Presented by: Jerry Chen Achal Dave Vaishaal Shankar Some slides from Jason Clemons Motivation Image Matching Correspondence Problem Desirable Feature Characteristics
SURF. Lecture6: SURF and HOG. Integral Image. Feature Evaluation with Integral Image
 SURF CSED441:Introduction to Computer Vision (2015S) Lecture6: SURF and HOG Bohyung Han CSE, POSTECH bhhan@postech.ac.kr Speed Up Robust Features (SURF) Simplified version of SIFT Faster computation but
SURF CSED441:Introduction to Computer Vision (2015S) Lecture6: SURF and HOG Bohyung Han CSE, POSTECH bhhan@postech.ac.kr Speed Up Robust Features (SURF) Simplified version of SIFT Faster computation but
EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT. Recap and Outline
 EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT Oct. 15, 2013 Prof. Ronald Fearing Electrical Engineering and Computer Sciences University of California, Berkeley (slides courtesy of Prof. John Wawrzynek)
EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT Oct. 15, 2013 Prof. Ronald Fearing Electrical Engineering and Computer Sciences University of California, Berkeley (slides courtesy of Prof. John Wawrzynek)
Computer Vision for HCI. Topics of This Lecture
 Computer Vision for HCI Interest Points Topics of This Lecture Local Invariant Features Motivation Requirements, Invariances Keypoint Localization Features from Accelerated Segment Test (FAST) Harris Shi-Tomasi
Computer Vision for HCI Interest Points Topics of This Lecture Local Invariant Features Motivation Requirements, Invariances Keypoint Localization Features from Accelerated Segment Test (FAST) Harris Shi-Tomasi
Coarse-to-fine image registration
 Today we will look at a few important topics in scale space in computer vision, in particular, coarseto-fine approaches, and the SIFT feature descriptor. I will present only the main ideas here to give
Today we will look at a few important topics in scale space in computer vision, in particular, coarseto-fine approaches, and the SIFT feature descriptor. I will present only the main ideas here to give
CAP 5415 Computer Vision Fall 2012
 CAP 5415 Computer Vision Fall 01 Dr. Mubarak Shah Univ. of Central Florida Office 47-F HEC Lecture-5 SIFT: David Lowe, UBC SIFT - Key Point Extraction Stands for scale invariant feature transform Patented
CAP 5415 Computer Vision Fall 01 Dr. Mubarak Shah Univ. of Central Florida Office 47-F HEC Lecture-5 SIFT: David Lowe, UBC SIFT - Key Point Extraction Stands for scale invariant feature transform Patented
CS4670: Computer Vision
 CS4670: Computer Vision Noah Snavely Lecture 6: Feature matching and alignment Szeliski: Chapter 6.1 Reading Last time: Corners and blobs Scale-space blob detector: Example Feature descriptors We know
CS4670: Computer Vision Noah Snavely Lecture 6: Feature matching and alignment Szeliski: Chapter 6.1 Reading Last time: Corners and blobs Scale-space blob detector: Example Feature descriptors We know
Ulas Bagci
 CAP5415- Computer Vision Lecture 5 and 6- Finding Features, Affine Invariance, SIFT Ulas Bagci bagci@ucf.edu 1 Outline Concept of Scale Pyramids Scale- space approaches briefly Scale invariant region selecqon
CAP5415- Computer Vision Lecture 5 and 6- Finding Features, Affine Invariance, SIFT Ulas Bagci bagci@ucf.edu 1 Outline Concept of Scale Pyramids Scale- space approaches briefly Scale invariant region selecqon
Announcements. Recognition I. Gradient Space (p,q) What is the reflectance map?
 What is the reflectance map?") Announcements I HW 3 due 12 noon, tomorrow. HW 4 to be posted soon recognition Lecture plan recognition for next two lectures, then video and motion. Introduction to Computer Vision CSE 152 Lecture 17
Announcements I HW 3 due 12 noon, tomorrow. HW 4 to be posted soon recognition Lecture plan recognition for next two lectures, then video and motion. Introduction to Computer Vision CSE 152 Lecture 17
Local invariant features
 Local invariant features Tuesday, Oct 28 Kristen Grauman UT-Austin Today Some more Pset 2 results Pset 2 returned, pick up solutions Pset 3 is posted, due 11/11 Local invariant features Detection of interest
Local invariant features Tuesday, Oct 28 Kristen Grauman UT-Austin Today Some more Pset 2 results Pset 2 returned, pick up solutions Pset 3 is posted, due 11/11 Local invariant features Detection of interest
Image Features. Work on project 1. All is Vanity, by C. Allan Gilbert,
 Image Features Work on project 1 All is Vanity, by C. Allan Gilbert, 1873-1929 Feature extrac*on: Corners and blobs c Mo*va*on: Automa*c panoramas Credit: Ma9 Brown Why extract features? Mo*va*on: panorama
Image Features Work on project 1 All is Vanity, by C. Allan Gilbert, 1873-1929 Feature extrac*on: Corners and blobs c Mo*va*on: Automa*c panoramas Credit: Ma9 Brown Why extract features? Mo*va*on: panorama
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely Lecture 4: Harris corner detection Szeliski: 4.1 Reading Announcements Project 1 (Hybrid Images) code due next Wednesday, Feb 14, by 11:59pm Artifacts due Friday, Feb
CS5670: Computer Vision Noah Snavely Lecture 4: Harris corner detection Szeliski: 4.1 Reading Announcements Project 1 (Hybrid Images) code due next Wednesday, Feb 14, by 11:59pm Artifacts due Friday, Feb
Human detection using histogram of oriented gradients. Srikumar Ramalingam School of Computing University of Utah
 Human detection using histogram of oriented gradients Srikumar Ramalingam School of Computing University of Utah Reference Navneet Dalal and Bill Triggs, Histograms of Oriented Gradients for Human Detection,
Human detection using histogram of oriented gradients Srikumar Ramalingam School of Computing University of Utah Reference Navneet Dalal and Bill Triggs, Histograms of Oriented Gradients for Human Detection,
SIFT - scale-invariant feature transform Konrad Schindler
 SIFT - scale-invariant feature transform Konrad Schindler Institute of Geodesy and Photogrammetry Invariant interest points Goal match points between images with very different scale, orientation, projective
SIFT - scale-invariant feature transform Konrad Schindler Institute of Geodesy and Photogrammetry Invariant interest points Goal match points between images with very different scale, orientation, projective
Image matching. Announcements. Harder case. Even harder case. Project 1 Out today Help session at the end of class. by Diva Sian.
 Announcements Project 1 Out today Help session at the end of class Image matching by Diva Sian by swashford Harder case Even harder case How the Afghan Girl was Identified by Her Iris Patterns Read the
Announcements Project 1 Out today Help session at the end of class Image matching by Diva Sian by swashford Harder case Even harder case How the Afghan Girl was Identified by Her Iris Patterns Read the
The SIFT (Scale Invariant Feature
 The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
Automatic Image Alignment (feature-based)
") Automatic Image Alignment (feature-based) Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2006 Today s lecture Feature
Automatic Image Alignment (feature-based) Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2006 Today s lecture Feature
EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm
 EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm Group 1: Mina A. Makar Stanford University mamakar@stanford.edu Abstract In this report, we investigate the application of the Scale-Invariant
EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm Group 1: Mina A. Makar Stanford University mamakar@stanford.edu Abstract In this report, we investigate the application of the Scale-Invariant
Multiple-Choice Questionnaire Group C
 Family name: Vision and Machine-Learning Given name: 1/28/2011 Multiple-Choice naire Group C No documents authorized. There can be several right answers to a question. Marking-scheme: 2 points if all right
Family name: Vision and Machine-Learning Given name: 1/28/2011 Multiple-Choice naire Group C No documents authorized. There can be several right answers to a question. Marking-scheme: 2 points if all right
Local Features Tutorial: Nov. 8, 04
 Local Features Tutorial: Nov. 8, 04 Local Features Tutorial References: Matlab SIFT tutorial (from course webpage) Lowe, David G. Distinctive Image Features from Scale Invariant Features, International
Local Features Tutorial: Nov. 8, 04 Local Features Tutorial References: Matlab SIFT tutorial (from course webpage) Lowe, David G. Distinctive Image Features from Scale Invariant Features, International
Computer Vision I - Appearance-based Matching and Projective Geometry
 Computer Vision I - Appearance-based Matching and Projective Geometry Carsten Rother 01/11/2016 Computer Vision I: Image Formation Process Roadmap for next four lectures Computer Vision I: Image Formation
Computer Vision I - Appearance-based Matching and Projective Geometry Carsten Rother 01/11/2016 Computer Vision I: Image Formation Process Roadmap for next four lectures Computer Vision I: Image Formation
BSB663 Image Processing Pinar Duygulu. Slides are adapted from Selim Aksoy
 BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
Image Processing. Image Features
 Image Processing Image Features Preliminaries 2 What are Image Features? Anything. What they are used for? Some statements about image fragments (patches) recognition Search for similar patches matching
Image Processing Image Features Preliminaries 2 What are Image Features? Anything. What they are used for? Some statements about image fragments (patches) recognition Search for similar patches matching
ImageCLEF 2011
 SZTAKI @ ImageCLEF 2011 Bálint Daróczy joint work with András Benczúr, Róbert Pethes Data Mining and Web Search Group Computer and Automation Research Institute Hungarian Academy of Sciences Training/test
SZTAKI @ ImageCLEF 2011 Bálint Daróczy joint work with András Benczúr, Róbert Pethes Data Mining and Web Search Group Computer and Automation Research Institute Hungarian Academy of Sciences Training/test
Visual Tracking (1) Tracking of Feature Points and Planar Rigid Objects
 Tracking of Feature Points and Planar Rigid Objects") Intelligent Control Systems Visual Tracking (1) Tracking of Feature Points and Planar Rigid Objects Shingo Kagami Graduate School of Information Sciences, Tohoku University swk(at)ic.is.tohoku.ac.jp http://www.ic.is.tohoku.ac.jp/ja/swk/
Intelligent Control Systems Visual Tracking (1) Tracking of Feature Points and Planar Rigid Objects Shingo Kagami Graduate School of Information Sciences, Tohoku University swk(at)ic.is.tohoku.ac.jp http://www.ic.is.tohoku.ac.jp/ja/swk/
Computer Vision I. Announcement. Corners. Edges. Numerical Derivatives f(x) Edge and Corner Detection. CSE252A Lecture 11
 Edge and Corner Detection. CSE252A Lecture 11") Announcement Edge and Corner Detection Slides are posted HW due Friday CSE5A Lecture 11 Edges Corners Edge is Where Change Occurs: 1-D Change is measured by derivative in 1D Numerical Derivatives f(x)
Announcement Edge and Corner Detection Slides are posted HW due Friday CSE5A Lecture 11 Edges Corners Edge is Where Change Occurs: 1-D Change is measured by derivative in 1D Numerical Derivatives f(x)
CHAPTER 1 Introduction 1. CHAPTER 2 Images, Sampling and Frequency Domain Processing 37
 Extended Contents List Preface... xi About the authors... xvii CHAPTER 1 Introduction 1 1.1 Overview... 1 1.2 Human and Computer Vision... 2 1.3 The Human Vision System... 4 1.3.1 The Eye... 5 1.3.2 The
Extended Contents List Preface... xi About the authors... xvii CHAPTER 1 Introduction 1 1.1 Overview... 1 1.2 Human and Computer Vision... 2 1.3 The Human Vision System... 4 1.3.1 The Eye... 5 1.3.2 The
Building a Panorama. Matching features. Matching with Features. How do we build a panorama? Computational Photography, 6.882
 Matching features Building a Panorama Computational Photography, 6.88 Prof. Bill Freeman April 11, 006 Image and shape descriptors: Harris corner detectors and SIFT features. Suggested readings: Mikolajczyk
Matching features Building a Panorama Computational Photography, 6.88 Prof. Bill Freeman April 11, 006 Image and shape descriptors: Harris corner detectors and SIFT features. Suggested readings: Mikolajczyk
CSE 527: Introduction to Computer Vision
 CSE 527: Introduction to Computer Vision Week 5 - Class 1: Matching, Stitching, Registration September 26th, 2017 ??? Recap Today Feature Matching Image Alignment Panoramas HW2! Feature Matches Feature
CSE 527: Introduction to Computer Vision Week 5 - Class 1: Matching, Stitching, Registration September 26th, 2017 ??? Recap Today Feature Matching Image Alignment Panoramas HW2! Feature Matches Feature
Comparison of Feature Detection and Matching Approaches: SIFT and SURF
 GRD Journals- Global Research and Development Journal for Engineering Volume 2 Issue 4 March 2017 ISSN: 2455-5703 Comparison of Detection and Matching Approaches: SIFT and SURF Darshana Mistry PhD student
GRD Journals- Global Research and Development Journal for Engineering Volume 2 Issue 4 March 2017 ISSN: 2455-5703 Comparison of Detection and Matching Approaches: SIFT and SURF Darshana Mistry PhD student
Object Recognition with Invariant Features
 Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
Fundamentals of Digital Image Processing
 \L\.6 Gw.i Fundamentals of Digital Image Processing A Practical Approach with Examples in Matlab Chris Solomon School of Physical Sciences, University of Kent, Canterbury, UK Toby Breckon School of Engineering,
\L\.6 Gw.i Fundamentals of Digital Image Processing A Practical Approach with Examples in Matlab Chris Solomon School of Physical Sciences, University of Kent, Canterbury, UK Toby Breckon School of Engineering,
Local features: detection and description May 12 th, 2015
 Local features: detection and description May 12 th, 2015 Yong Jae Lee UC Davis Announcements PS1 grades up on SmartSite PS1 stats: Mean: 83.26 Standard Dev: 28.51 PS2 deadline extended to Saturday, 11:59
Local features: detection and description May 12 th, 2015 Yong Jae Lee UC Davis Announcements PS1 grades up on SmartSite PS1 stats: Mean: 83.26 Standard Dev: 28.51 PS2 deadline extended to Saturday, 11:59
CS 223B Computer Vision Problem Set 3
 CS 223B Computer Vision Problem Set 3 Due: Feb. 22 nd, 2011 1 Probabilistic Recursion for Tracking In this problem you will derive a method for tracking a point of interest through a sequence of images.
CS 223B Computer Vision Problem Set 3 Due: Feb. 22 nd, 2011 1 Probabilistic Recursion for Tracking In this problem you will derive a method for tracking a point of interest through a sequence of images.
Image Analysis & Retrieval
 Outline CS/EE 5590 / ENG 401 Special Topics (Class Ids: 44873, 44874) Fall 2016, M/W 4-5:15pm@Bloch 0012 Image Analysis & Retrieval Background Objective of the class Prerequisite Lecture Plan Course Project
Outline CS/EE 5590 / ENG 401 Special Topics (Class Ids: 44873, 44874) Fall 2016, M/W 4-5:15pm@Bloch 0012 Image Analysis & Retrieval Background Objective of the class Prerequisite Lecture Plan Course Project
Computer Vision. Recap: Smoothing with a Gaussian. Recap: Effect of σ on derivatives. Computer Science Tripos Part II. Dr Christopher Town
 Recap: Smoothing with a Gaussian Computer Vision Computer Science Tripos Part II Dr Christopher Town Recall: parameter σ is the scale / width / spread of the Gaussian kernel, and controls the amount of
Recap: Smoothing with a Gaussian Computer Vision Computer Science Tripos Part II Dr Christopher Town Recall: parameter σ is the scale / width / spread of the Gaussian kernel, and controls the amount of
Computer Vision I. Announcements. Fourier Tansform. Efficient Implementation. Edge and Corner Detection. CSE252A Lecture 13.
 Announcements Edge and Corner Detection HW3 assigned CSE252A Lecture 13 Efficient Implementation Both, the Box filter and the Gaussian filter are separable: First convolve each row of input image I with
Announcements Edge and Corner Detection HW3 assigned CSE252A Lecture 13 Efficient Implementation Both, the Box filter and the Gaussian filter are separable: First convolve each row of input image I with
AK Computer Vision Feature Point Detectors and Descriptors
 AK Computer Vision Feature Point Detectors and Descriptors 1 Feature Point Detectors and Descriptors: Motivation 2 Step 1: Detect local features should be invariant to scale and rotation, or perspective
AK Computer Vision Feature Point Detectors and Descriptors 1 Feature Point Detectors and Descriptors: Motivation 2 Step 1: Detect local features should be invariant to scale and rotation, or perspective
Image Analysis & Retrieval Lec 05 - Interesting Points Detection
 CS/ 5590 / NG 401 Special Topics Spring 018 mage Analsis & Retrieal Lec 05 - nteresting Points Detection Zh Li Dept of CS UMKC Office: FH560 mail: lizh@mkc.ed Ph: 346. http://l.web.mkc.ed/lizh mage Analsis
CS/ 5590 / NG 401 Special Topics Spring 018 mage Analsis & Retrieal Lec 05 - nteresting Points Detection Zh Li Dept of CS UMKC Office: FH560 mail: lizh@mkc.ed Ph: 346. http://l.web.mkc.ed/lizh mage Analsis
Learning and Inferring Depth from Monocular Images. Jiyan Pan April 1, 2009
 Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
ME/CS 132: Introduction to Vision-based Robot Navigation! Low-level Image Processing" Larry Matthies"
 ME/CS 132: Introduction to Vision-based Robot Navigation! Low-level Image Processing" Larry Matthies" lhm@jpl.nasa.gov, 818-354-3722" Announcements" First homework grading is done! Second homework is due
ME/CS 132: Introduction to Vision-based Robot Navigation! Low-level Image Processing" Larry Matthies" lhm@jpl.nasa.gov, 818-354-3722" Announcements" First homework grading is done! Second homework is due
Image Features: Local Descriptors. Sanja Fidler CSC420: Intro to Image Understanding 1/ 58
 Image Features: Local Descriptors Sanja Fidler CSC420: Intro to Image Understanding 1/ 58 [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 2/ 58 Local Features Detection: Identify
Image Features: Local Descriptors Sanja Fidler CSC420: Intro to Image Understanding 1/ 58 [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 2/ 58 Local Features Detection: Identify
Chapter 3 Image Registration. Chapter 3 Image Registration
 Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
Local features: detection and description. Local invariant features
 Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
Selective Search for Object Recognition
 Selective Search for Object Recognition Uijlings et al. Schuyler Smith Overview Introduction Object Recognition Selective Search Similarity Metrics Results Object Recognition Kitten Goal: Problem: Where
Selective Search for Object Recognition Uijlings et al. Schuyler Smith Overview Introduction Object Recognition Selective Search Similarity Metrics Results Object Recognition Kitten Goal: Problem: Where
Pop Quiz 1 [10 mins]
![Pop Quiz 1 [10 mins]](/thumbs/77/76612064.jpg "Pop Quiz 1 [10 mins]") Pop Quiz 1 [10 mins] 1. An audio signal makes 250 cycles in its span (or has a frequency of 250Hz). How many samples do you need, at a minimum, to sample it correctly? [1] 2. If the number of bits is reduced,
Pop Quiz 1 [10 mins] 1. An audio signal makes 250 cycles in its span (or has a frequency of 250Hz). How many samples do you need, at a minimum, to sample it correctly? [1] 2. If the number of bits is reduced,
Category vs. instance recognition
 Category vs. instance recognition Category: Find all the people Find all the buildings Often within a single image Often sliding window Instance: Is this face James? Find this specific famous building
Category vs. instance recognition Category: Find all the people Find all the buildings Often within a single image Often sliding window Instance: Is this face James? Find this specific famous building
EXAM SOLUTIONS. Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006,
 School of Computer Science and Communication, KTH Danica Kragic EXAM SOLUTIONS Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006, 14.00 19.00 Grade table 0-25 U 26-35 3 36-45
School of Computer Science and Communication, KTH Danica Kragic EXAM SOLUTIONS Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006, 14.00 19.00 Grade table 0-25 U 26-35 3 36-45
CS231A Section 6: Problem Set 3
 CS231A Section 6: Problem Set 3 Kevin Wong Review 6 -! 1 11/09/2012 Announcements PS3 Due 2:15pm Tuesday, Nov 13 Extra Office Hours: Friday 6 8pm Huang Common Area, Basement Level. Review 6 -! 2 Topics
CS231A Section 6: Problem Set 3 Kevin Wong Review 6 -! 1 11/09/2012 Announcements PS3 Due 2:15pm Tuesday, Nov 13 Extra Office Hours: Friday 6 8pm Huang Common Area, Basement Level. Review 6 -! 2 Topics
Large scale object/scene recognition
 Large scale object/scene recognition Image dataset: > 1 million images query Image search system ranked image list Each image described by approximately 2000 descriptors 2 10 9 descriptors to index! Database
Large scale object/scene recognition Image dataset: > 1 million images query Image search system ranked image list Each image described by approximately 2000 descriptors 2 10 9 descriptors to index! Database
Local Feature Detectors
 Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
Automatic Image Alignment
 Automatic Image Alignment Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2010 Live Homography DEMO Check out panoramio.com
Automatic Image Alignment Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2010 Live Homography DEMO Check out panoramio.com
Recognition of Animal Skin Texture Attributes in the Wild. Amey Dharwadker (aap2174) Kai Zhang (kz2213)
 Kai Zhang (kz2213)") Recognition of Animal Skin Texture Attributes in the Wild Amey Dharwadker (aap2174) Kai Zhang (kz2213) Motivation Patterns and textures are have an important role in object description and understanding
Recognition of Animal Skin Texture Attributes in the Wild Amey Dharwadker (aap2174) Kai Zhang (kz2213) Motivation Patterns and textures are have an important role in object description and understanding
Image Matching. AKA: Image registration, the correspondence problem, Tracking,
 Image Matching AKA: Image registration, the correspondence problem, Tracking, What Corresponds to What? Daisy? Daisy From: www.amphian.com Relevant for Analysis of Image Pairs (or more) Also Relevant for
Image Matching AKA: Image registration, the correspondence problem, Tracking, What Corresponds to What? Daisy? Daisy From: www.amphian.com Relevant for Analysis of Image Pairs (or more) Also Relevant for
CS 229 Midterm Review
 CS 229 Midterm Review Course Staff Fall 2018 11/2/2018 Outline Today: SVMs Kernels Tree Ensembles EM Algorithm / Mixture Models [ Focus on building intuition, less so on solving specific problems. Ask
CS 229 Midterm Review Course Staff Fall 2018 11/2/2018 Outline Today: SVMs Kernels Tree Ensembles EM Algorithm / Mixture Models [ Focus on building intuition, less so on solving specific problems. Ask
Evaluation and comparison of interest points/regions
 Introduction Evaluation and comparison of interest points/regions Quantitative evaluation of interest point/region detectors points / regions at the same relative location and area Repeatability rate :
Introduction Evaluation and comparison of interest points/regions Quantitative evaluation of interest point/region detectors points / regions at the same relative location and area Repeatability rate :
Feature Detection. Raul Queiroz Feitosa. 3/30/2017 Feature Detection 1
 Feature Detection Raul Queiroz Feitosa 3/30/2017 Feature Detection 1 Objetive This chapter discusses the correspondence problem and presents approaches to solve it. 3/30/2017 Feature Detection 2 Outline
Feature Detection Raul Queiroz Feitosa 3/30/2017 Feature Detection 1 Objetive This chapter discusses the correspondence problem and presents approaches to solve it. 3/30/2017 Feature Detection 2 Outline
Image Analysis & Retrieval Lec-01: Introduction
 CS/EE 5590 / ENG 401 Special Topics Spring 2017, M/W 5:30-6:45pm@Haag 309 Image Analysis & Retrieval Lec-01: Introduction Zhu Li Dept of CSEE, UMKC Office: FH560E, Email: lizhu@umkc.edu, Ph: x 2346. http://l.web.umkc.edu/lizhu
CS/EE 5590 / ENG 401 Special Topics Spring 2017, M/W 5:30-6:45pm@Haag 309 Image Analysis & Retrieval Lec-01: Introduction Zhu Li Dept of CSEE, UMKC Office: FH560E, Email: lizhu@umkc.edu, Ph: x 2346. http://l.web.umkc.edu/lizhu
Image processing and features
 Image processing and features Gabriele Bleser gabriele.bleser@dfki.de Thanks to Harald Wuest, Folker Wientapper and Marc Pollefeys Introduction Previous lectures: geometry Pose estimation Epipolar geometry
Image processing and features Gabriele Bleser gabriele.bleser@dfki.de Thanks to Harald Wuest, Folker Wientapper and Marc Pollefeys Introduction Previous lectures: geometry Pose estimation Epipolar geometry
Click to edit title style
 Class 2: Low-level Representation Liangliang Cao, Jan 31, 2013 EECS 6890 Topics in Information Processing Spring 2013, Columbia University http://rogerioferis.com/visualrecognitionandsearch Visual Recognition
Class 2: Low-level Representation Liangliang Cao, Jan 31, 2013 EECS 6890 Topics in Information Processing Spring 2013, Columbia University http://rogerioferis.com/visualrecognitionandsearch Visual Recognition
Final Exam Study Guide
 Final Exam Study Guide Exam Window: 28th April, 12:00am EST to 30th April, 11:59pm EST Description As indicated in class the goal of the exam is to encourage you to review the material from the course.
Final Exam Study Guide Exam Window: 28th April, 12:00am EST to 30th April, 11:59pm EST Description As indicated in class the goal of the exam is to encourage you to review the material from the course.