Collision Detection between Dynamic Rigid Objects and Static Displacement Mapped Surfaces in Computer Games
|
|
|
- Charlotte Green
- 5 years ago
- Views:
Transcription
1 between Dynamic Rigid Objects and Static Displacement Mapped Surfaces in Computer Games Author:, KTH Mentor: Joacim Jonsson, Avalanche Studios Supervisor: Prof. Christopher Peters, KTH 26 June, 2015
2 Overview Introduction Purpose: Improve the performance and robustness of collision detection in Avalanche game engine. Contribution: Fix artifacts in some cases by creating new backward projection methods. Highly reduce the time of collision detection between dynamic objects and the terrain by creating multiresolution method.
3 Outline Introduction 1 Introduction Displacement Mapped Surface 2 3 Multiresolution in the Game Summary
4 Outline Introduction Displacement Mapped Surface 1 Introduction Displacement Mapped Surface 2 3 Multiresolution in the Game Summary

5 Introduction Displacement Mapped Surface Definition Collision detection refers the detection of the intersection of two or more objects. Figure: Collision detection in Street Fighter

6 Penetration Introduction Displacement Mapped Surface When collision is detected, the penetration follows.
7 Displacement Mapped Surface Two forms of collision detection: Continuous: very expensive. Simulate solid objects in real life. Discrete: objects will end up with penetrating each other.

8 Backtracking Introduction Displacement Mapped Surface Like Tom Cruise in Edge of Tomorrow, it turns time backwards and fix the penetration that occurred in the last frame.
9 Displacement Mapped Surface How to determine the collision between the dynamic objects and the terrain? First, how is the terrain formed? It is formed by base triangle primitives with displacement maps.
10 Outline Introduction Displacement Mapped Surface 1 Introduction Displacement Mapped Surface 2 3 Multiresolution in the Game Summary
, n(u, v) = N 0 + u(n 1 N 0 ) + v(n 2 N 0 ). (1) Figure: A base primitive.")
11 Base Primitive Introduction Displacement Mapped Surface p(u, v) = P 0 + u(p 1 P 0 ) + v(p 2 P 0 ), n(u, v) = N 0 + u(n 1 N 0 ) + v(n 2 N 0 ). (1) Figure: A base primitive.
12 2D Terrain Surface Introduction Displacement Mapped Surface p (u, v) = p(u, v) + d(u, v)n(u, v). (2) Figure: Base primitives and the projected surface.
13 Displacement maps Introduction Displacement Mapped Surface The terrain map consists of terrain patches. Each terrain patch consists of several non-uniform terrain quads. Figure: Displacement map of a terrain patch.(slide 27,Slide 28)


14 Introduction Displacement Mapped Surface
15 Projected Surface Introduction Displacement Mapped Surface A bilinear patch is formed by four non-coplanar points: p 00 ([0, 0, 1]), p 01 ([1, 0, 1]), p 10 ([0, 1, 0.5]), p 11 ([1, 1, 4]). Assume that the patch faces upwards (a) Two triangles can bound the bilinear patch. (b) Two triangles cannot bound the bilinear patch.
")
16 Displacement Mapped Surface Figure: Determine triangle type. (Slide 30)
17 Displacement Mapped Surface How to determine the collision between the dynamic objects and the terrain? Second, how is the collision detection performed? It is performed by two phases: the broad phase and the narrow phase.
18 Outline Introduction 1 Introduction Displacement Mapped Surface 2 3 Multiresolution in the Game Summary

. (a) Sweep and prune.")
19 Introduction The broad phase collision detection helps to filtrate the potentially colliding object sets. The brute-force way is doing collision test for all pairs of objects, and the complexity is O(n 2 ). (a) Sweep and prune. (b) Spatial subdivision.
20 Tree Structure Introduction Figure: Collision detection between AABBs (Axis Aligned Bounding Box).

21 Swept Volume Introduction The AABB in the game bounds not the object, but the Swept Volume of the object from one frame to the next.
22 Early Out Introduction Figure: Early out check using the bounding planes.
23 Outline Introduction 1 Introduction Displacement Mapped Surface 2 3 Multiresolution in the Game Summary

24 Introduction Problem The large terrain system contains complex geometry, like tunnels, caves and cliffs. The participating colliding shapes are usually restricted to being convex.
25 Multiresolution Bounding Volume Multiresolution bounding volume method is created in this thesis for the static terrain collision detection. Figure: A 2D case. The coarsest bounding surface (red line), one level finer bounding surface (blue line) and finest bounding surface (black dot line). (Slide 30)
26 Bounding Volumes Introduction Figure: There will be a dislocation between bounding volumes between neighbouring quads.
27 Bounding Surface (2D) Figure: A quad with constrained points (grey dots) and bounding points (green dots).(slide 13)
 is not corresponds with that in the world space.")
28 Optimization is done separately for each quad. Location relationship in the displacement maps (slide 13) is not corresponds with that in the world space. Figure: These two quads are detached in the world space. 4 4 (green) quad and 2 2 (red) quad
29 Inequality-constrained Nonlinear Programming Problem The optimization problem is formed as follows: minimize N i=0 f (x i) subject to Q j (x i ) 0 i = 1,, N, j = 1,, M. (3) where x i R is the variable, which represents the forwards projected length from a bounding point.
30 To make the bounding surface bound the surface as tightly as possible, the objective function f (x i ) can be derived as follows, i.e. to keep the distances between the bounding surface and the terrain as small as possible (Slide 25, Slide 16): f (x i ) = (x i l i ) 2 (4) where l i is the original displacement length in the bounding point p j. The constrains Q j can be derived as following (to keep the forwards projected points between the bounding planes): Q j = (P 1 P 0 ) (P 2 P 0 ) (P j P 0 ) (5) where P 0, P 1 and P 2 are the forwards projected points of the bounding points p 0, p 1 and p 2. P j is the forwards projected point of a constrained point p j.
31 Optimization Method Introduction The problem is nonlinear problems with nonlinear inequality constraints. minimize f 0 (x) subject to f i (x) 0, i = 1,, m, x min j x j x max j j = 1,, n. where x = (x 1,, x n ) T R n is the vector of variables, x min j and x max j are the lower and upper bounds of x j. Typically, the objective function f 0 and the constraint functions f 0, f 1,, f m are twice continuously differentiable. (6)
32 A CCSA (Conservative Convex Separable Approximation) method contains the outer and inner iterations. Within each outer iteration, there will be no or several inner iterations [1]. minimize f 0 (x) + a 0 z + m i=1 (c iy i d iy 2 i ) subject to f i (x) a i z y i 0, i = 1,, m, x min j x j x max j j = 1,, n, z 0 and y i 0, i = 1,, m, (7) where a 0, a i, c i and d i are given real numbers such that a 0 > 0, a i 0, c i 0, d i 0, and c i + d i > 0, a i c i > a 0 for i = 1,, m. The index k represents the outer iteration number and l represents the inner iteration number.
33 The subproblem takes the form as follows: minimize g (k,l) 0 (x) + a 0 z + m i=1 (c iy i d iy 2 i ) subject to g (k,l) i (x) a i z y i 0, i = 1,, m, x X (k), z 0 and y j 0, (8) The function g (k,l) i (x) in this subproblem is chosen as: g (k,l) i (x) = v i (x, x (k), σ (k) )+ρ (k,l) i ω i (x, x (k), σ (k) ), i = 0, 1,, m. (9) where v i and w i are real value functions.
34
35 Given a quad with two primitive triangles inside, and it has 9 9 constrained points. The number of bounding points is assumed to be four (i.e. the bounding size is eight), for simple test. These four bounding points are mainly four vertices of this quad. (a) The projection directions on the constrained points and the bounding points. (b) Surface f (x, y) = x 3 + y 3.
 Side view.")
36 Red dots represent the projected points on the surface and the blue circles represents the four bounding points. It is clearly seen that two triangles bound these projected points. (a) Side view. (b) Isometric view.
 Isometric view.")

37 Bounding Volumes in the Game (a) Isometric view. (b) Side view. Figure: Upper and lower bounding surfaces with size 8.
 Isometric view.")

38 Bounding Volumes in the Game (a) Isometric view. (b) Side view. Figure: Upper and lower bounding surfaces with size 4.
 Isometric view.")

39 Bounding Volumes in the Game (a) Isometric view. (b) Side view. Figure: Upper and lower bounding surfaces with size 2.

 (b) (c)")


40 Bounding Volumes Introduction (a) (b) (c) (d) Figure: There will be no gap between neighbouring convex bounding volumes.
41 Convex versus Convex One of the most commonly used algorithm in game engine is GJK (Gilbert-Johnson-Keerthi) algorithm [2]. This algorithm relies on a support function to iteratively get closer simplices to the solution using Minkowski difference. (a) Two shapes collide on one vertex. (b) No collision.
42 The first simplex is built using what is called a support function. Support function returns one point inside the Minkowski difference given two sets K A and K B. Figure: The first two vertices in the first simplex.
 New simplex does not contain the origin.")
43 (a) The first iteration. (b) New simplex does not contain the origin. (c) The second iteration. (d) New simplex contains the origin.
44 Multiresolution
45 Coarsest Level
46 One Level Down
47 Finest Level
48 Outline Introduction 1 Introduction Displacement Mapped Surface 2 3 Multiresolution in the Game Summary
49 Introduction Definition Backward projection is the inverse problem of forward projection, by projecting an arbitrary point in space onto the base primitive. Figure: The projection length is smaller than the displacement length, and collision is detected.
50 Aligned Plane Method The method currently used is constructing a plane which passes through the query point P. This plane is parallel to the base primitive. Figure: Aligned plane method (bad case).
51 This method works well for most cases in the game. In most cases, the lengths along the projection direction of the base primitives are small compared with the size of the base primitive (as (b) suggests) or the projection direction in one base primitive are close (as (a) suggests). (a) (b)


52 Introduction Bad Case But bad cases can happen and will result in error when doing collision detection with the terrain surface. (a) (b)
53 Aligned Projection Direction Method Given a query point P in space and the backwards projected point P on the base primitive. The line PP should have the same direction as the interpolated projection direction on P, i.e. the same direction as n. The objective function is as follows: f = (r g) (r g) where r = u(n 1 N 0 ) + v(n 2 N 0 ) + N 0 g = P u(p 1 P 0 ) v(p 2 P 0 ) P 0 (10) The BFGS (Broyden-Fletcher-Goldfarb-Shanno) algorithm is used to solve this unconstrained nonlinear optimization problem.
54 Alpha Plane Method Introduction The three forward projected vertices on the alpha plane are denoted as P 0, P 1 and P 2, where P 0 = P 0 + αn 0, P 1 = P 1 + αn 1, P 2 = P 2 + αn 2. (11) To ensure the alpha plane passing through the query point, the objective function will be: f = ((P 1 P 0 ) (P 2 P 0 )) (P P 0 ) (12) Newton s iteration method is used to obtain α.
55 Alpha Plane Method Introduction Figure: Aligned plane method.
 Alpha Plane")
 Aligned Projection")
56 Introduction Bad Case Fixed (a) Alpha Plane Method. (b) Aligned Projection Direction Method.
57 Outline Introduction Multiresolution in the Game Summary 1 Introduction Displacement Mapped Surface 2 3 Multiresolution in the Game Summary
58 Test Environment Introduction Multiresolution in the Game Summary The character is teleported to a remote place without too many dynamic objects for test. Irrelevant complex objects, like the ships near the shore, are moved away from the terrain. Complex objects, like warships, are spawned to test the consuming time.
.")
59 Original Method Introduction Multiresolution in the Game Summary Original method performs backward projection in each vertex of the dynamic object after the broad phase is done (refer to Slide 49). It is quite expensive compared with multiresolution collision detection.
, Multiresolution collision detection: coarsest bounding volume detection (green), finer bounding volume detection (violet,")
60 Multiresolution in the Game Summary Improvement using Multiresolution Figure: The time comparison when spawn one warship. Original collision detection (red), Multiresolution collision detection: coarsest bounding volume detection (green), finer bounding volume detection (violet, close to 0), final surface detection (yellow).

61 Multiresolution in the Game Summary Improvement using Multiresolution

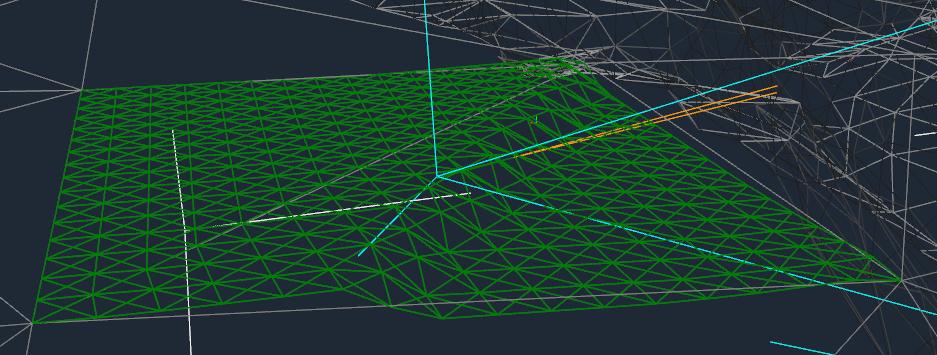
62 Multiresolution in the Game Summary Figure: A warship contains many sub-objects. The multiresolution collision detection method will only detect the collision between the bottom of the warship and the terrain surface. It is notable that the gray mesh in this figure is not the terrain surface, but the projected primitives.
, Multiresolution collision detection: coarsest bounding volume detection (green), finer bounding volume detection (violet, close to 0), final")
63 Multiresolution in the Game Summary Figure: The time comparison on four threads when the warship is moved to some place with high density of primitives. Original collision detection (red), Multiresolution collision detection: coarsest bounding volume detection (green), finer bounding volume detection (violet, close to 0), final surface detection (yellow).
64 Multiresolution in the Game Summary Figure: Comparison between the two methods in one certain frame when the warship is put in the area with high density of primitives.
65 Outline Introduction Multiresolution in the Game Summary 1 Introduction Displacement Mapped Surface 2 3 Multiresolution in the Game Summary
66 Multiresolution in the Game Summary Figure: The flow chart of this thesis.
67 Appendix Reference Reference Krister Svanberg. A Class of Globally Convergent Optimization Methods Based on Conservative Convex Separable Approximations. SIAM J. Optim. 12(2), p , 2002p. E.G. Gilbert, D.W. Johnson, and S.S. Keerthi. A Fast Procedure for Computing the Distance between Complex Objects in Three-Dimensional Space. IEEE Journal of Robotics and Automation, 4(2): , Java and Physics Engine. gjk-distance-closest-points/.
References. Additional lecture notes for 2/18/02.
 References Additional lecture notes for 2/18/02. I-COLLIDE: Interactive and Exact Collision Detection for Large-Scale Environments, by Cohen, Lin, Manocha & Ponamgi, Proc. of ACM Symposium on Interactive
References Additional lecture notes for 2/18/02. I-COLLIDE: Interactive and Exact Collision Detection for Large-Scale Environments, by Cohen, Lin, Manocha & Ponamgi, Proc. of ACM Symposium on Interactive
Collision Detection. These slides are mainly from Ming Lin s course notes at UNC Chapel Hill
 Collision Detection These slides are mainly from Ming Lin s course notes at UNC Chapel Hill http://www.cs.unc.edu/~lin/comp259-s06/ Computer Animation ILE5030 Computer Animation and Special Effects 2 Haptic
Collision Detection These slides are mainly from Ming Lin s course notes at UNC Chapel Hill http://www.cs.unc.edu/~lin/comp259-s06/ Computer Animation ILE5030 Computer Animation and Special Effects 2 Haptic
A Different Approach for Continuous Physics. Vincent ROBERT Physics Programmer at Ubisoft
 A Different Approach for Continuous Physics Vincent ROBERT vincent.robert@ubisoft.com Physics Programmer at Ubisoft A Different Approach for Continuous Physics Existing approaches Our method Limitations
A Different Approach for Continuous Physics Vincent ROBERT vincent.robert@ubisoft.com Physics Programmer at Ubisoft A Different Approach for Continuous Physics Existing approaches Our method Limitations
Collision and Proximity Queries
 Collision and Proximity Queries Dinesh Manocha (based on slides from Ming Lin) COMP790-058 Fall 2013 Geometric Proximity Queries l Given two object, how would you check: If they intersect with each other
Collision and Proximity Queries Dinesh Manocha (based on slides from Ming Lin) COMP790-058 Fall 2013 Geometric Proximity Queries l Given two object, how would you check: If they intersect with each other
Distance and Collision Detection
 Distance and Collision Detection Efi Fogel efif@post.tau.ac.il School of computer science, Tel Aviv University Fall 2003/4 Motion Planning seminar 1/33 The Papers A Fast Procedure for Computing the Distance
Distance and Collision Detection Efi Fogel efif@post.tau.ac.il School of computer science, Tel Aviv University Fall 2003/4 Motion Planning seminar 1/33 The Papers A Fast Procedure for Computing the Distance
Introduction to Collision Detection
 Computing and Software Department, McMaster University Introduction to Collision Detection John McCutchan November 9, 2006 McCutchan: Introduction to Collision Detection(slide 1), 1 Introduction Collision
Computing and Software Department, McMaster University Introduction to Collision Detection John McCutchan November 9, 2006 McCutchan: Introduction to Collision Detection(slide 1), 1 Introduction Collision
Geometric Computations for Simulation
 1 Geometric Computations for Simulation David E. Johnson I. INTRODUCTION A static virtual world would be boring and unlikely to draw in a user enough to create a sense of immersion. Simulation allows things
1 Geometric Computations for Simulation David E. Johnson I. INTRODUCTION A static virtual world would be boring and unlikely to draw in a user enough to create a sense of immersion. Simulation allows things
CPSC / Sonny Chan - University of Calgary. Collision Detection II
 CPSC 599.86 / 601.86 Sonny Chan - University of Calgary Collision Detection II Outline Broad phase collision detection: - Problem definition and motivation - Bounding volume hierarchies - Spatial partitioning
CPSC 599.86 / 601.86 Sonny Chan - University of Calgary Collision Detection II Outline Broad phase collision detection: - Problem definition and motivation - Bounding volume hierarchies - Spatial partitioning
Voronoi Diagram. Xiao-Ming Fu
 Voronoi Diagram Xiao-Ming Fu Outlines Introduction Post Office Problem Voronoi Diagram Duality: Delaunay triangulation Centroidal Voronoi tessellations (CVT) Definition Applications Algorithms Outlines
Voronoi Diagram Xiao-Ming Fu Outlines Introduction Post Office Problem Voronoi Diagram Duality: Delaunay triangulation Centroidal Voronoi tessellations (CVT) Definition Applications Algorithms Outlines
Collision Detection II. These slides are mainly from Ming Lin s course notes at UNC Chapel Hill
 Collision Detection II These slides are mainly from Ming Lin s course notes at UNC Chapel Hill http://www.cs.unc.edu/~lin/comp259-s06/ Some Possible Approaches Geometric methods Algebraic techniques Hierarchical
Collision Detection II These slides are mainly from Ming Lin s course notes at UNC Chapel Hill http://www.cs.unc.edu/~lin/comp259-s06/ Some Possible Approaches Geometric methods Algebraic techniques Hierarchical
Simulation in Computer Graphics Space Subdivision. Matthias Teschner
 Simulation in Computer Graphics Space Subdivision Matthias Teschner Outline Introduction Uniform grid Octree and k-d tree BSP tree University of Freiburg Computer Science Department 2 Model Partitioning
Simulation in Computer Graphics Space Subdivision Matthias Teschner Outline Introduction Uniform grid Octree and k-d tree BSP tree University of Freiburg Computer Science Department 2 Model Partitioning
Critique for CS 448B: Topics in Modeling The Voronoi-clip Collision Detection Algorithm
 Critique for CS 448B: Topics in Modeling The Voronoi-clip Collision Detection Algorithm 1. Citation Richard Bragg March 3, 2000 Mirtich B. (1997) V-Clip: Fast and Robust Polyhedral Collision Detection.
Critique for CS 448B: Topics in Modeling The Voronoi-clip Collision Detection Algorithm 1. Citation Richard Bragg March 3, 2000 Mirtich B. (1997) V-Clip: Fast and Robust Polyhedral Collision Detection.
Lesson 05. Mid Phase. Collision Detection
 Lesson 05 Mid Phase Collision Detection Lecture 05 Outline Problem definition and motivations Generic Bounding Volume Hierarchy (BVH) BVH construction, fitting, overlapping Metrics and Tandem traversal
Lesson 05 Mid Phase Collision Detection Lecture 05 Outline Problem definition and motivations Generic Bounding Volume Hierarchy (BVH) BVH construction, fitting, overlapping Metrics and Tandem traversal
Collision Detection based on Spatial Partitioning
 Simulation in Computer Graphics Collision Detection based on Spatial Partitioning Matthias Teschner Computer Science Department University of Freiburg Outline introduction uniform grid Octree and k-d tree
Simulation in Computer Graphics Collision Detection based on Spatial Partitioning Matthias Teschner Computer Science Department University of Freiburg Outline introduction uniform grid Octree and k-d tree
Collision detection. Piotr Fulma«ski. 1 grudnia
 Collision detection Piotr Fulma«ski piotr@fulmanski.pl 1 grudnia 2016 Table of contents Collision in games Algorithms to detect collision in games depend on the type of shapes that can collide (e.g. rectangle
Collision detection Piotr Fulma«ski piotr@fulmanski.pl 1 grudnia 2016 Table of contents Collision in games Algorithms to detect collision in games depend on the type of shapes that can collide (e.g. rectangle
An iterative, octree-based algorithm for distance computation between polyhedra with complex surfaces 1
 An iterative, octree-based algorithm for distance computation between polyhedra with complex surfaces 1 André Borrmann, Stefanie Schraufstetter, Christoph van Treeck, Ernst Rank {borrmann, schraufstetter,
An iterative, octree-based algorithm for distance computation between polyhedra with complex surfaces 1 André Borrmann, Stefanie Schraufstetter, Christoph van Treeck, Ernst Rank {borrmann, schraufstetter,
Collision detection. Piotr Fulma«ski. 19 pa¹dziernika Wydziaª Matematyki i Informatyki, Uniwersytet Šódzki, Polska
 Collision detection Piotr Fulma«ski Wydziaª Matematyki i Informatyki, Uniwersytet Šódzki, Polska 19 pa¹dziernika 2015 Table of contents Collision in games Algorithms to detect collision in games depend
Collision detection Piotr Fulma«ski Wydziaª Matematyki i Informatyki, Uniwersytet Šódzki, Polska 19 pa¹dziernika 2015 Table of contents Collision in games Algorithms to detect collision in games depend
Using Bounding Volume Hierarchies Efficient Collision Detection for Several Hundreds of Objects
 Part 7: Collision Detection Virtuelle Realität Wintersemester 2007/08 Prof. Bernhard Jung Overview Bounding Volumes Separating Axis Theorem Using Bounding Volume Hierarchies Efficient Collision Detection
Part 7: Collision Detection Virtuelle Realität Wintersemester 2007/08 Prof. Bernhard Jung Overview Bounding Volumes Separating Axis Theorem Using Bounding Volume Hierarchies Efficient Collision Detection
Physically-Based Laser Simulation
 Physically-Based Laser Simulation Greg Reshko Carnegie Mellon University reshko@cs.cmu.edu Dave Mowatt Carnegie Mellon University dmowatt@andrew.cmu.edu Abstract In this paper, we describe our work on
Physically-Based Laser Simulation Greg Reshko Carnegie Mellon University reshko@cs.cmu.edu Dave Mowatt Carnegie Mellon University dmowatt@andrew.cmu.edu Abstract In this paper, we describe our work on
Overview. Collision Detection. A Simple Collision Detection Algorithm. Collision Detection in a Dynamic Environment. Query Types.
 Overview Collision Detection Alan Liu aliu@usuhs.mil The Surgical Simulation Laboratory National Capital Area Medical Simulation Center Uniformed Services University http://simcen.usuhs.mil/miccai2003
Overview Collision Detection Alan Liu aliu@usuhs.mil The Surgical Simulation Laboratory National Capital Area Medical Simulation Center Uniformed Services University http://simcen.usuhs.mil/miccai2003
Collision Detection. Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering
 RBE 550 MOTION PLANNING BASED ON DR. DMITRY BERENSON S RBE 550 Collision Detection Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Euler Angle RBE
RBE 550 MOTION PLANNING BASED ON DR. DMITRY BERENSON S RBE 550 Collision Detection Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Euler Angle RBE
Computer Graphics Ray Casting. Matthias Teschner
 Computer Graphics Ray Casting Matthias Teschner Outline Context Implicit surfaces Parametric surfaces Combined objects Triangles Axis-aligned boxes Iso-surfaces in grids Summary University of Freiburg
Computer Graphics Ray Casting Matthias Teschner Outline Context Implicit surfaces Parametric surfaces Combined objects Triangles Axis-aligned boxes Iso-surfaces in grids Summary University of Freiburg
Simulation (last lecture and this one)
") Simulation (last lecture and this one) How used in games? Dynamics Collisions simple ------------------------------- Collisions harder detection bounding boxes response Controllers Mocap + simulation User
Simulation (last lecture and this one) How used in games? Dynamics Collisions simple ------------------------------- Collisions harder detection bounding boxes response Controllers Mocap + simulation User
15-494/694: Cognitive Robotics
 15-494/694: Cognitive Robotics Dave Touretzky Lecture 9: Path Planning with Rapidly-exploring Random Trees Navigating with the Pilot Image from http://www.futuristgerd.com/2015/09/10 Outline How is path
15-494/694: Cognitive Robotics Dave Touretzky Lecture 9: Path Planning with Rapidly-exploring Random Trees Navigating with the Pilot Image from http://www.futuristgerd.com/2015/09/10 Outline How is path
Computational Geometry
 Computational Geometry 600.658 Convexity A set S is convex if for any two points p, q S the line segment pq S. S p S q Not convex Convex? Convexity A set S is convex if it is the intersection of (possibly
Computational Geometry 600.658 Convexity A set S is convex if for any two points p, q S the line segment pq S. S p S q Not convex Convex? Convexity A set S is convex if it is the intersection of (possibly
Tracking Minimum Distances between Curved Objects with Parametric Surfaces in Real Time
 Tracking Minimum Distances between Curved Objects with Parametric Surfaces in Real Time Zhihua Zou, Jing Xiao Department of Computer Science University of North Carolina Charlotte zzou28@yahoo.com, xiao@uncc.edu
Tracking Minimum Distances between Curved Objects with Parametric Surfaces in Real Time Zhihua Zou, Jing Xiao Department of Computer Science University of North Carolina Charlotte zzou28@yahoo.com, xiao@uncc.edu
Collision Detection. Pu Jiantao.
 Collision Detection Pu Jiantao. 12-09 Content Introduction CD with rays Dynamic CD using BSP Trees Hierarchical Method OBBTree Method Some Other Topics 12-1717 2 Introduction Collision Collision is a fundamental
Collision Detection Pu Jiantao. 12-09 Content Introduction CD with rays Dynamic CD using BSP Trees Hierarchical Method OBBTree Method Some Other Topics 12-1717 2 Introduction Collision Collision is a fundamental
Direct Rendering of Trimmed NURBS Surfaces
 Direct Rendering of Trimmed NURBS Surfaces Hardware Graphics Pipeline 2/ 81 Hardware Graphics Pipeline GPU Video Memory CPU Vertex Processor Raster Unit Fragment Processor Render Target Screen Extended
Direct Rendering of Trimmed NURBS Surfaces Hardware Graphics Pipeline 2/ 81 Hardware Graphics Pipeline GPU Video Memory CPU Vertex Processor Raster Unit Fragment Processor Render Target Screen Extended
Intersection Acceleration
 Advanced Computer Graphics Intersection Acceleration Matthias Teschner Computer Science Department University of Freiburg Outline introduction bounding volume hierarchies uniform grids kd-trees octrees
Advanced Computer Graphics Intersection Acceleration Matthias Teschner Computer Science Department University of Freiburg Outline introduction bounding volume hierarchies uniform grids kd-trees octrees
Rigid Body Simulation. Jeremy Ulrich Advised by David Mount Fall 2013
 Rigid Body Simulation Jeremy Ulrich Advised by David Mount Fall 2013 Overview The project presented here is a real-time 3D rigid body physics engine, and is the result of an Independent Study on collision
Rigid Body Simulation Jeremy Ulrich Advised by David Mount Fall 2013 Overview The project presented here is a real-time 3D rigid body physics engine, and is the result of an Independent Study on collision
Visualization and Analysis of Inverse Kinematics Algorithms Using Performance Metric Maps
 Visualization and Analysis of Inverse Kinematics Algorithms Using Performance Metric Maps Oliver Cardwell, Ramakrishnan Mukundan Department of Computer Science and Software Engineering University of Canterbury
Visualization and Analysis of Inverse Kinematics Algorithms Using Performance Metric Maps Oliver Cardwell, Ramakrishnan Mukundan Department of Computer Science and Software Engineering University of Canterbury
Collision Detection CS434. Daniel G. Aliaga Department of Computer Science Purdue University
 Collision Detection CS434 Daniel G. Aliaga Department of Computer Science Purdue University Some Applications Animations/games Robotic planning Haptics Some collision detection approaches Minkowski Sum
Collision Detection CS434 Daniel G. Aliaga Department of Computer Science Purdue University Some Applications Animations/games Robotic planning Haptics Some collision detection approaches Minkowski Sum
CS337 INTRODUCTION TO COMPUTER GRAPHICS. Describing Shapes. Constructing Objects in Computer Graphics. Bin Sheng Representing Shape 9/20/16 1/15
 Describing Shapes Constructing Objects in Computer Graphics 1/15 2D Object Definition (1/3) Lines and polylines: Polylines: lines drawn between ordered points A closed polyline is a polygon, a simple polygon
Describing Shapes Constructing Objects in Computer Graphics 1/15 2D Object Definition (1/3) Lines and polylines: Polylines: lines drawn between ordered points A closed polyline is a polygon, a simple polygon
Collision handling: detection and response
 Collision handling: detection and response Collision handling overview Detection Discrete collision detection Convex polygon intersection test General polygon intersection test Continuous collision detection
Collision handling: detection and response Collision handling overview Detection Discrete collision detection Convex polygon intersection test General polygon intersection test Continuous collision detection
Spatial Data Structures
 CSCI 420 Computer Graphics Lecture 17 Spatial Data Structures Jernej Barbic University of Southern California Hierarchical Bounding Volumes Regular Grids Octrees BSP Trees [Angel Ch. 8] 1 Ray Tracing Acceleration
CSCI 420 Computer Graphics Lecture 17 Spatial Data Structures Jernej Barbic University of Southern California Hierarchical Bounding Volumes Regular Grids Octrees BSP Trees [Angel Ch. 8] 1 Ray Tracing Acceleration
Introduction to Optimization Problems and Methods
 Introduction to Optimization Problems and Methods wjch@umich.edu December 10, 2009 Outline 1 Linear Optimization Problem Simplex Method 2 3 Cutting Plane Method 4 Discrete Dynamic Programming Problem Simplex
Introduction to Optimization Problems and Methods wjch@umich.edu December 10, 2009 Outline 1 Linear Optimization Problem Simplex Method 2 3 Cutting Plane Method 4 Discrete Dynamic Programming Problem Simplex
CS123 INTRODUCTION TO COMPUTER GRAPHICS. Describing Shapes. Constructing Objects in Computer Graphics 1/15
 Describing Shapes Constructing Objects in Computer Graphics 1/15 2D Object Definition (1/3) Lines and polylines: Polylines: lines drawn between ordered points A closed polyline is a polygon, a simple polygon
Describing Shapes Constructing Objects in Computer Graphics 1/15 2D Object Definition (1/3) Lines and polylines: Polylines: lines drawn between ordered points A closed polyline is a polygon, a simple polygon
Spatial Data Structures
 CSCI 480 Computer Graphics Lecture 7 Spatial Data Structures Hierarchical Bounding Volumes Regular Grids BSP Trees [Ch. 0.] March 8, 0 Jernej Barbic University of Southern California http://www-bcf.usc.edu/~jbarbic/cs480-s/
CSCI 480 Computer Graphics Lecture 7 Spatial Data Structures Hierarchical Bounding Volumes Regular Grids BSP Trees [Ch. 0.] March 8, 0 Jernej Barbic University of Southern California http://www-bcf.usc.edu/~jbarbic/cs480-s/
Introduction to Optimization
 Introduction to Optimization Second Order Optimization Methods Marc Toussaint U Stuttgart Planned Outline Gradient-based optimization (1st order methods) plain grad., steepest descent, conjugate grad.,
Introduction to Optimization Second Order Optimization Methods Marc Toussaint U Stuttgart Planned Outline Gradient-based optimization (1st order methods) plain grad., steepest descent, conjugate grad.,
Spatial Data Structures
 15-462 Computer Graphics I Lecture 17 Spatial Data Structures Hierarchical Bounding Volumes Regular Grids Octrees BSP Trees Constructive Solid Geometry (CSG) April 1, 2003 [Angel 9.10] Frank Pfenning Carnegie
15-462 Computer Graphics I Lecture 17 Spatial Data Structures Hierarchical Bounding Volumes Regular Grids Octrees BSP Trees Constructive Solid Geometry (CSG) April 1, 2003 [Angel 9.10] Frank Pfenning Carnegie
Numerical Optimization
 Numerical Optimization Quantitative Macroeconomics Raül Santaeulàlia-Llopis MOVE-UAB and Barcelona GSE Fall 2018 Raül Santaeulàlia-Llopis (MOVE-UAB,BGSE) QM: Numerical Optimization Fall 2018 1 / 46 1 Introduction
Numerical Optimization Quantitative Macroeconomics Raül Santaeulàlia-Llopis MOVE-UAB and Barcelona GSE Fall 2018 Raül Santaeulàlia-Llopis (MOVE-UAB,BGSE) QM: Numerical Optimization Fall 2018 1 / 46 1 Introduction
TSBK03 Screen-Space Ambient Occlusion
 TSBK03 Screen-Space Ambient Occlusion Joakim Gebart, Jimmy Liikala December 15, 2013 Contents 1 Abstract 1 2 History 2 2.1 Crysis method..................................... 2 3 Chosen method 2 3.1 Algorithm
TSBK03 Screen-Space Ambient Occlusion Joakim Gebart, Jimmy Liikala December 15, 2013 Contents 1 Abstract 1 2 History 2 2.1 Crysis method..................................... 2 3 Chosen method 2 3.1 Algorithm
13.472J/1.128J/2.158J/16.940J COMPUTATIONAL GEOMETRY
 13.472J/1.128J/2.158J/16.940J COMPUTATIONAL GEOMETRY Lecture 23 Dr. W. Cho Prof. N. M. Patrikalakis Copyright c 2003 Massachusetts Institute of Technology Contents 23 F.E. and B.E. Meshing Algorithms 2
13.472J/1.128J/2.158J/16.940J COMPUTATIONAL GEOMETRY Lecture 23 Dr. W. Cho Prof. N. M. Patrikalakis Copyright c 2003 Massachusetts Institute of Technology Contents 23 F.E. and B.E. Meshing Algorithms 2
08: CONTACT MODELLING 15/02/2016
 08: CONTACT MODELLING 15/02/2016 2 THE NARROW PHASE The purpose of Narrow Phase: Exact collision detection AND also where precisely have objects touched, where to apply forces, torques? Image 2004 Pauly,
08: CONTACT MODELLING 15/02/2016 2 THE NARROW PHASE The purpose of Narrow Phase: Exact collision detection AND also where precisely have objects touched, where to apply forces, torques? Image 2004 Pauly,
1.2 Numerical Solutions of Flow Problems
 1.2 Numerical Solutions of Flow Problems DIFFERENTIAL EQUATIONS OF MOTION FOR A SIMPLIFIED FLOW PROBLEM Continuity equation for incompressible flow: 0 Momentum (Navier-Stokes) equations for a Newtonian
1.2 Numerical Solutions of Flow Problems DIFFERENTIAL EQUATIONS OF MOTION FOR A SIMPLIFIED FLOW PROBLEM Continuity equation for incompressible flow: 0 Momentum (Navier-Stokes) equations for a Newtonian
Homework 1: Implicit Surfaces, Collision Detection, & Volumetric Data Structures. Loop Subdivision. Loop Subdivision. Questions/Comments?
 Homework 1: Questions/Comments? Implicit Surfaces,, & Volumetric Data Structures Loop Subdivision Shirley, Fundamentals of Computer Graphics Loop Subdivision SIGGRAPH 2000 course notes Subdivision for
Homework 1: Questions/Comments? Implicit Surfaces,, & Volumetric Data Structures Loop Subdivision Shirley, Fundamentals of Computer Graphics Loop Subdivision SIGGRAPH 2000 course notes Subdivision for
Collision Detection with Bounding Volume Hierarchies
 Simulation in Computer Graphics Collision Detection with Bounding Volume Hierarchies Matthias Teschner Computer Science Department University of Freiburg Outline introduction bounding volumes BV hierarchies
Simulation in Computer Graphics Collision Detection with Bounding Volume Hierarchies Matthias Teschner Computer Science Department University of Freiburg Outline introduction bounding volumes BV hierarchies
Spatial Data Structures
 15-462 Computer Graphics I Lecture 17 Spatial Data Structures Hierarchical Bounding Volumes Regular Grids Octrees BSP Trees Constructive Solid Geometry (CSG) March 28, 2002 [Angel 8.9] Frank Pfenning Carnegie
15-462 Computer Graphics I Lecture 17 Spatial Data Structures Hierarchical Bounding Volumes Regular Grids Octrees BSP Trees Constructive Solid Geometry (CSG) March 28, 2002 [Angel 8.9] Frank Pfenning Carnegie
Collision detection in Chrono
 Collision detection in Chrono Collision shapes 2 Collision shapes Collision shapes are defined respect to the REF frame of the body Spheres, boxes, cylinders, convex hulls, ellipsoids, compounds, Concave
Collision detection in Chrono Collision shapes 2 Collision shapes Collision shapes are defined respect to the REF frame of the body Spheres, boxes, cylinders, convex hulls, ellipsoids, compounds, Concave
T6: Position-Based Simulation Methods in Computer Graphics. Jan Bender Miles Macklin Matthias Müller
 T6: Position-Based Simulation Methods in Computer Graphics Jan Bender Miles Macklin Matthias Müller Jan Bender Organizer Professor at the Visual Computing Institute at Aachen University Research topics
T6: Position-Based Simulation Methods in Computer Graphics Jan Bender Miles Macklin Matthias Müller Jan Bender Organizer Professor at the Visual Computing Institute at Aachen University Research topics
Conjectures concerning the geometry of 2-point Centroidal Voronoi Tessellations
 Conjectures concerning the geometry of 2-point Centroidal Voronoi Tessellations Emma Twersky May 2017 Abstract This paper is an exploration into centroidal Voronoi tessellations, or CVTs. A centroidal
Conjectures concerning the geometry of 2-point Centroidal Voronoi Tessellations Emma Twersky May 2017 Abstract This paper is an exploration into centroidal Voronoi tessellations, or CVTs. A centroidal
2D rendering takes a photo of the 2D scene with a virtual camera that selects an axis aligned rectangle from the scene. The photograph is placed into
 2D rendering takes a photo of the 2D scene with a virtual camera that selects an axis aligned rectangle from the scene. The photograph is placed into the viewport of the current application window. A pixel
2D rendering takes a photo of the 2D scene with a virtual camera that selects an axis aligned rectangle from the scene. The photograph is placed into the viewport of the current application window. A pixel
Collision processing
 Collision processing Different types of collisions Collision of a simulated deformable structure with a kinematic structure (easier) Collision with a rigid moving object, the ground, etc. Collision object
Collision processing Different types of collisions Collision of a simulated deformable structure with a kinematic structure (easier) Collision with a rigid moving object, the ground, etc. Collision object
Free-Form Deformation and Other Deformation Techniques
 Free-Form Deformation and Other Deformation Techniques Deformation Deformation Basic Definition Deformation: A transformation/mapping of the positions of every particle in the original object to those
Free-Form Deformation and Other Deformation Techniques Deformation Deformation Basic Definition Deformation: A transformation/mapping of the positions of every particle in the original object to those
Cut-and-Paste Editing of Multiresolution Surfaces
 Cut-and-Paste Editing of Multiresolution Surfaces Henning Biermann, Ioana Martin, Fausto Bernardini, Denis Zorin NYU Media Research Lab IBM T. J. Watson Research Center Surface Pasting Transfer geometry
Cut-and-Paste Editing of Multiresolution Surfaces Henning Biermann, Ioana Martin, Fausto Bernardini, Denis Zorin NYU Media Research Lab IBM T. J. Watson Research Center Surface Pasting Transfer geometry
graphics pipeline computer graphics graphics pipeline 2009 fabio pellacini 1
 graphics pipeline computer graphics graphics pipeline 2009 fabio pellacini 1 graphics pipeline sequence of operations to generate an image using object-order processing primitives processed one-at-a-time
graphics pipeline computer graphics graphics pipeline 2009 fabio pellacini 1 graphics pipeline sequence of operations to generate an image using object-order processing primitives processed one-at-a-time
Spatial Data Structures
 Spatial Data Structures Hierarchical Bounding Volumes Regular Grids Octrees BSP Trees Constructive Solid Geometry (CSG) [Angel 9.10] Outline Ray tracing review what rays matter? Ray tracing speedup faster
Spatial Data Structures Hierarchical Bounding Volumes Regular Grids Octrees BSP Trees Constructive Solid Geometry (CSG) [Angel 9.10] Outline Ray tracing review what rays matter? Ray tracing speedup faster
graphics pipeline computer graphics graphics pipeline 2009 fabio pellacini 1
 graphics pipeline computer graphics graphics pipeline 2009 fabio pellacini 1 graphics pipeline sequence of operations to generate an image using object-order processing primitives processed one-at-a-time
graphics pipeline computer graphics graphics pipeline 2009 fabio pellacini 1 graphics pipeline sequence of operations to generate an image using object-order processing primitives processed one-at-a-time
CSE 167: Introduction to Computer Graphics Lecture #18: More Effects. Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2016
 CSE 167: Introduction to Computer Graphics Lecture #18: More Effects Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2016 Announcements TA evaluations CAPE Final project blog
CSE 167: Introduction to Computer Graphics Lecture #18: More Effects Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2016 Announcements TA evaluations CAPE Final project blog
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (3 pts) How to generate Delaunay Triangulation? (3 pts) Explain the difference
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (3 pts) How to generate Delaunay Triangulation? (3 pts) Explain the difference
Collision Detection of Triangle Meshes using GPU
 Collision Detection of Triangle Meshes using GPU Nils Bäckman March 13, 2011 Master s Thesis in Computing Science, 30 ECTS credits Supervisor at CS-UmU: Daniel Sjölie Examiner: Fredrik Georgsson Umeå University
Collision Detection of Triangle Meshes using GPU Nils Bäckman March 13, 2011 Master s Thesis in Computing Science, 30 ECTS credits Supervisor at CS-UmU: Daniel Sjölie Examiner: Fredrik Georgsson Umeå University
Lecture 11: Ray tracing (cont.)
") Interactive Computer Graphics Ray tracing - Summary Lecture 11: Ray tracing (cont.) Graphics Lecture 10: Slide 1 Some slides adopted from H. Pfister, Harvard Graphics Lecture 10: Slide 2 Ray tracing -
Interactive Computer Graphics Ray tracing - Summary Lecture 11: Ray tracing (cont.) Graphics Lecture 10: Slide 1 Some slides adopted from H. Pfister, Harvard Graphics Lecture 10: Slide 2 Ray tracing -
Ray Tracing Acceleration Data Structures
 Ray Tracing Acceleration Data Structures Sumair Ahmed October 29, 2009 Ray Tracing is very time-consuming because of the ray-object intersection calculations. With the brute force method, each ray has
Ray Tracing Acceleration Data Structures Sumair Ahmed October 29, 2009 Ray Tracing is very time-consuming because of the ray-object intersection calculations. With the brute force method, each ray has
Scene Management. Video Game Technologies 11498: MSc in Computer Science and Engineering 11156: MSc in Game Design and Development
 Video Game Technologies 11498: MSc in Computer Science and Engineering 11156: MSc in Game Design and Development Chap. 5 Scene Management Overview Scene Management vs Rendering This chapter is about rendering
Video Game Technologies 11498: MSc in Computer Science and Engineering 11156: MSc in Game Design and Development Chap. 5 Scene Management Overview Scene Management vs Rendering This chapter is about rendering
CPSC 340: Machine Learning and Data Mining. Density-Based Clustering Fall 2016
 CPSC 340: Machine Learning and Data Mining Density-Based Clustering Fall 2016 Assignment 1 : Admin 2 late days to hand it in before Wednesday s class. 3 late days to hand it in before Friday s class. 0
CPSC 340: Machine Learning and Data Mining Density-Based Clustering Fall 2016 Assignment 1 : Admin 2 late days to hand it in before Wednesday s class. 3 late days to hand it in before Friday s class. 0
ASIA MAHDI NASER ALZUBAIDI Computer Science Department, College of Science Karbala University Karbala, Iraq MAIS SAAD AL-SAOUD
 EUROPEAN ACADEMIC RESEARCH Vol. I, Issue 10/ January 2014 ISSN 2286-4822 www.euacademic.org Impact Factor: 0.485 (GIF) DRJI Value: 5.9 (B+) Gilbert-Johnson-Keerthi Algorithm for Computing the Shortest
EUROPEAN ACADEMIC RESEARCH Vol. I, Issue 10/ January 2014 ISSN 2286-4822 www.euacademic.org Impact Factor: 0.485 (GIF) DRJI Value: 5.9 (B+) Gilbert-Johnson-Keerthi Algorithm for Computing the Shortest
Anatomy of a Physics Engine. Erwin Coumans
 Anatomy of a Physics Engine Erwin Coumans erwin_coumans@playstation.sony.com How it fits together» Terminology» Rigid Body Dynamics» Collision Detection» Software Design Decisions» Trip through the Physics
Anatomy of a Physics Engine Erwin Coumans erwin_coumans@playstation.sony.com How it fits together» Terminology» Rigid Body Dynamics» Collision Detection» Software Design Decisions» Trip through the Physics
Lesson 1: Creating T- Spline Forms. In Samples section of your Data Panel, browse to: Fusion 101 Training > 03 Sculpt > 03_Sculpting_Introduction.
 3.1: Sculpting Sculpting in Fusion 360 allows for the intuitive freeform creation of organic solid bodies and surfaces by leveraging the T- Splines technology. In the Sculpt Workspace, you can rapidly
3.1: Sculpting Sculpting in Fusion 360 allows for the intuitive freeform creation of organic solid bodies and surfaces by leveraging the T- Splines technology. In the Sculpt Workspace, you can rapidly
S U N G - E U I YO O N, K A I S T R E N D E R I N G F R E E LY A VA I L A B L E O N T H E I N T E R N E T
 S U N G - E U I YO O N, K A I S T R E N D E R I N G F R E E LY A VA I L A B L E O N T H E I N T E R N E T Copyright 2018 Sung-eui Yoon, KAIST freely available on the internet http://sglab.kaist.ac.kr/~sungeui/render
S U N G - E U I YO O N, K A I S T R E N D E R I N G F R E E LY A VA I L A B L E O N T H E I N T E R N E T Copyright 2018 Sung-eui Yoon, KAIST freely available on the internet http://sglab.kaist.ac.kr/~sungeui/render
Continuous Collision Detection and Physics
 Continuous Collision Detection and Physics Erwin Coumans, Sony Computer Entertainment August 2005, Draft revision 5 0 Overview A novel approach to Angular and Linear Continuous Collision Detection is presented.
Continuous Collision Detection and Physics Erwin Coumans, Sony Computer Entertainment August 2005, Draft revision 5 0 Overview A novel approach to Angular and Linear Continuous Collision Detection is presented.
Chapter 4. Clustering Core Atoms by Location
 Chapter 4. Clustering Core Atoms by Location In this chapter, a process for sampling core atoms in space is developed, so that the analytic techniques in section 3C can be applied to local collections
Chapter 4. Clustering Core Atoms by Location In this chapter, a process for sampling core atoms in space is developed, so that the analytic techniques in section 3C can be applied to local collections
Terrain rendering (part 1) Due: Monday, March 10, 10pm
 Due: Monday, March 10, 10pm") CMSC 3700 Winter 014 Introduction to Computer Graphics Project 4 February 5 Terrain rendering (part 1) Due: Monday, March 10, 10pm 1 Summary The final two projects involves rendering large-scale outdoor
CMSC 3700 Winter 014 Introduction to Computer Graphics Project 4 February 5 Terrain rendering (part 1) Due: Monday, March 10, 10pm 1 Summary The final two projects involves rendering large-scale outdoor
(Refer Slide Time: 00:02:24 min)
") CAD / CAM Prof. Dr. P. V. Madhusudhan Rao Department of Mechanical Engineering Indian Institute of Technology, Delhi Lecture No. # 9 Parametric Surfaces II So these days, we are discussing the subject
CAD / CAM Prof. Dr. P. V. Madhusudhan Rao Department of Mechanical Engineering Indian Institute of Technology, Delhi Lecture No. # 9 Parametric Surfaces II So these days, we are discussing the subject
TDA362/DIT223 Computer Graphics EXAM (Same exam for both CTH- and GU students)
") TDA362/DIT223 Computer Graphics EXAM (Same exam for both CTH- and GU students) Saturday, January 13 th, 2018, 08:30-12:30 Examiner Ulf Assarsson, tel. 031-772 1775 Permitted Technical Aids None, except
TDA362/DIT223 Computer Graphics EXAM (Same exam for both CTH- and GU students) Saturday, January 13 th, 2018, 08:30-12:30 Examiner Ulf Assarsson, tel. 031-772 1775 Permitted Technical Aids None, except
What is a Rigid Body?
 Physics on the GPU What is a Rigid Body? A rigid body is a non-deformable object that is a idealized solid Each rigid body is defined in space by its center of mass To make things simpler we assume the
Physics on the GPU What is a Rigid Body? A rigid body is a non-deformable object that is a idealized solid Each rigid body is defined in space by its center of mass To make things simpler we assume the
CMSC427 Final Practice v2 Fall 2017
 CMSC427 Final Practice v2 Fall 2017 This is to represent the flow of the final and give you an idea of relative weighting. No promises that knowing this will predict how you ll do on the final. Some questions
CMSC427 Final Practice v2 Fall 2017 This is to represent the flow of the final and give you an idea of relative weighting. No promises that knowing this will predict how you ll do on the final. Some questions
Overview. Collision detection. Collision detection. Brute force collision detection. Brute force collision detection. Motivation
 Overview Collision detection Alan Liu aliu@simcen.usuhs.mil Surgical Simulation Laboratory National Capital Area Medical Simulation Center Uniformed Services University of the Health Sciences http://simcen.usuhs.mil/mmvr2002
Overview Collision detection Alan Liu aliu@simcen.usuhs.mil Surgical Simulation Laboratory National Capital Area Medical Simulation Center Uniformed Services University of the Health Sciences http://simcen.usuhs.mil/mmvr2002
Computational Geometry
 Lecture 12: Lecture 12: Motivation: Terrains by interpolation To build a model of the terrain surface, we can start with a number of sample points where we know the height. Lecture 12: Motivation: Terrains
Lecture 12: Lecture 12: Motivation: Terrains by interpolation To build a model of the terrain surface, we can start with a number of sample points where we know the height. Lecture 12: Motivation: Terrains
Motivation. Freeform Shape Representations for Efficient Geometry Processing. Operations on Geometric Objects. Functional Representations
 Motivation Freeform Shape Representations for Efficient Geometry Processing Eurographics 23 Granada, Spain Geometry Processing (points, wireframes, patches, volumes) Efficient algorithms always have to
Motivation Freeform Shape Representations for Efficient Geometry Processing Eurographics 23 Granada, Spain Geometry Processing (points, wireframes, patches, volumes) Efficient algorithms always have to
From curves to surfaces. Parametric surfaces and solid modeling. Extrusions. Surfaces of revolution. So far have discussed spline curves in 2D
 From curves to surfaces Parametric surfaces and solid modeling CS 465 Lecture 12 2007 Doug James & Steve Marschner 1 So far have discussed spline curves in 2D it turns out that this already provides of
From curves to surfaces Parametric surfaces and solid modeling CS 465 Lecture 12 2007 Doug James & Steve Marschner 1 So far have discussed spline curves in 2D it turns out that this already provides of
Multi-View Matching & Mesh Generation. Qixing Huang Feb. 13 th 2017
 Multi-View Matching & Mesh Generation Qixing Huang Feb. 13 th 2017 Geometry Reconstruction Pipeline RANSAC --- facts Sampling Feature point detection [Gelfand et al. 05, Huang et al. 06] Correspondences
Multi-View Matching & Mesh Generation Qixing Huang Feb. 13 th 2017 Geometry Reconstruction Pipeline RANSAC --- facts Sampling Feature point detection [Gelfand et al. 05, Huang et al. 06] Correspondences
The Traditional Graphics Pipeline
 Last Time? The Traditional Graphics Pipeline Participating Media Measuring BRDFs 3D Digitizing & Scattering BSSRDFs Monte Carlo Simulation Dipole Approximation Today Ray Casting / Tracing Advantages? Ray
Last Time? The Traditional Graphics Pipeline Participating Media Measuring BRDFs 3D Digitizing & Scattering BSSRDFs Monte Carlo Simulation Dipole Approximation Today Ray Casting / Tracing Advantages? Ray
Bounding Volume Hierarchies
 Tutorial: Real-Time Collision Detection for Dynamic Virtual Environments Bounding Volume Hierarchies Stefan Kimmerle WSI/GRIS University of Tübingen Outline Introduction Bounding Volume Types Hierarchy
Tutorial: Real-Time Collision Detection for Dynamic Virtual Environments Bounding Volume Hierarchies Stefan Kimmerle WSI/GRIS University of Tübingen Outline Introduction Bounding Volume Types Hierarchy
Programming Game Engines ITP 485 (4 Units)
") Programming Game Engines ITP 485 (4 Units) Objective This course provides students with an in-depth exploration of 3D game engine architecture. Students will learn state-of-the-art software architecture
Programming Game Engines ITP 485 (4 Units) Objective This course provides students with an in-depth exploration of 3D game engine architecture. Students will learn state-of-the-art software architecture
Surface Modeling. Polygon Tables. Types: Generating models: Polygon Surfaces. Polygon surfaces Curved surfaces Volumes. Interactive Procedural
 Surface Modeling Types: Polygon surfaces Curved surfaces Volumes Generating models: Interactive Procedural Polygon Tables We specify a polygon surface with a set of vertex coordinates and associated attribute
Surface Modeling Types: Polygon surfaces Curved surfaces Volumes Generating models: Interactive Procedural Polygon Tables We specify a polygon surface with a set of vertex coordinates and associated attribute
Comparison of Interior Point Filter Line Search Strategies for Constrained Optimization by Performance Profiles
 INTERNATIONAL JOURNAL OF MATHEMATICS MODELS AND METHODS IN APPLIED SCIENCES Comparison of Interior Point Filter Line Search Strategies for Constrained Optimization by Performance Profiles M. Fernanda P.
INTERNATIONAL JOURNAL OF MATHEMATICS MODELS AND METHODS IN APPLIED SCIENCES Comparison of Interior Point Filter Line Search Strategies for Constrained Optimization by Performance Profiles M. Fernanda P.
The Traditional Graphics Pipeline
 Last Time? The Traditional Graphics Pipeline Reading for Today A Practical Model for Subsurface Light Transport, Jensen, Marschner, Levoy, & Hanrahan, SIGGRAPH 2001 Participating Media Measuring BRDFs
Last Time? The Traditional Graphics Pipeline Reading for Today A Practical Model for Subsurface Light Transport, Jensen, Marschner, Levoy, & Hanrahan, SIGGRAPH 2001 Participating Media Measuring BRDFs
Dynamic Collision Detection
 Distance Computation Between Non-Convex Polyhedra June 17, 2002 Applications Dynamic Collision Detection Applications Dynamic Collision Detection Evaluating Safety Tolerances Applications Dynamic Collision
Distance Computation Between Non-Convex Polyhedra June 17, 2002 Applications Dynamic Collision Detection Applications Dynamic Collision Detection Evaluating Safety Tolerances Applications Dynamic Collision
Subdivision. Outline. Key Questions. Subdivision Surfaces. Advanced Computer Graphics (Spring 2013) Video: Geri s Game (outside link)
 Video: Geri s Game (outside link)") Advanced Computer Graphics (Spring 03) CS 83, Lecture 7: Subdivision Ravi Ramamoorthi http://inst.eecs.berkeley.edu/~cs83/sp3 Slides courtesy of Szymon Rusinkiewicz, James O Brien with material from Denis
Advanced Computer Graphics (Spring 03) CS 83, Lecture 7: Subdivision Ravi Ramamoorthi http://inst.eecs.berkeley.edu/~cs83/sp3 Slides courtesy of Szymon Rusinkiewicz, James O Brien with material from Denis
Objects DO overlap. Objects DO NOT overlap. No calculations needed.
 Physically Based Modeling for Interactive Simulation and Games Scribe Notes for the lecture on February 23rd Collision Detection Spring 2011 Recep Doga Siyli Collision detection involves "computational
Physically Based Modeling for Interactive Simulation and Games Scribe Notes for the lecture on February 23rd Collision Detection Spring 2011 Recep Doga Siyli Collision detection involves "computational
Surgical Cutting on a Multimodal Object Representation
 Surgical Cutting on a Multimodal Object Representation Lenka Jeřábková and Torsten Kuhlen Virtual Reality Group, RWTH Aachen University, 52074 Aachen Email: jerabkova@rz.rwth-aachen.de Abstract. In this
Surgical Cutting on a Multimodal Object Representation Lenka Jeřábková and Torsten Kuhlen Virtual Reality Group, RWTH Aachen University, 52074 Aachen Email: jerabkova@rz.rwth-aachen.de Abstract. In this
Curve Corner Cutting
 Subdivision ision Techniqueses Spring 2010 1 Curve Corner Cutting Take two points on different edges of a polygon and join them with a line segment. Then, use this line segment to replace all vertices
Subdivision ision Techniqueses Spring 2010 1 Curve Corner Cutting Take two points on different edges of a polygon and join them with a line segment. Then, use this line segment to replace all vertices
Evaluating the Quality of Triangle, Quadrilateral, and Hybrid Meshes Before and After Refinement
 Rensselaer Polytechnic Institute Advanced Computer Graphics, Spring 2014 Final Project Evaluating the Quality of Triangle, Quadrilateral, and Hybrid Meshes Before and After Refinement Author: Rebecca Nordhauser
Rensselaer Polytechnic Institute Advanced Computer Graphics, Spring 2014 Final Project Evaluating the Quality of Triangle, Quadrilateral, and Hybrid Meshes Before and After Refinement Author: Rebecca Nordhauser
Mesh-Based Inverse Kinematics
 CS468, Wed Nov 9 th 2005 Mesh-Based Inverse Kinematics R. W. Sumner, M. Zwicker, C. Gotsman, J. Popović SIGGRAPH 2005 The problem 1 General approach Learn from experience... 2 As-rigid-as-possible shape
CS468, Wed Nov 9 th 2005 Mesh-Based Inverse Kinematics R. W. Sumner, M. Zwicker, C. Gotsman, J. Popović SIGGRAPH 2005 The problem 1 General approach Learn from experience... 2 As-rigid-as-possible shape
CS452/552; EE465/505. Clipping & Scan Conversion
 CS452/552; EE465/505 Clipping & Scan Conversion 3-31 15 Outline! From Geometry to Pixels: Overview Clipping (continued) Scan conversion Read: Angel, Chapter 8, 8.1-8.9 Project#1 due: this week Lab4 due:
CS452/552; EE465/505 Clipping & Scan Conversion 3-31 15 Outline! From Geometry to Pixels: Overview Clipping (continued) Scan conversion Read: Angel, Chapter 8, 8.1-8.9 Project#1 due: this week Lab4 due:
CAB: Fast Update of OBB Trees for Collision Detection between Articulated Bodies
 CAB: Fast Update of OBB Trees for Collision Detection between Articulated Bodies Harald Schmidl Nolan Walker Ming C. Lin {schmidl walkern lin}@cs.unc.edu Department of Computer Science Sitterson Hall,
CAB: Fast Update of OBB Trees for Collision Detection between Articulated Bodies Harald Schmidl Nolan Walker Ming C. Lin {schmidl walkern lin}@cs.unc.edu Department of Computer Science Sitterson Hall,
Point Cloud Simplification and Processing for Path-Planning. Master s Thesis in Engineering Mathematics and Computational Science DAVID ERIKSSON
 Point Cloud Simplification and Processing for Path-Planning Master s Thesis in Engineering Mathematics and Computational Science DAVID ERIKSSON Department of Mathematical Sciences Chalmers University of
Point Cloud Simplification and Processing for Path-Planning Master s Thesis in Engineering Mathematics and Computational Science DAVID ERIKSSON Department of Mathematical Sciences Chalmers University of
improving raytracing speed
 ray tracing II computer graphics ray tracing II 2006 fabio pellacini 1 improving raytracing speed computer graphics ray tracing II 2006 fabio pellacini 2 raytracing computational complexity ray-scene intersection
ray tracing II computer graphics ray tracing II 2006 fabio pellacini 1 improving raytracing speed computer graphics ray tracing II 2006 fabio pellacini 2 raytracing computational complexity ray-scene intersection
Numerical Optimization: Introduction and gradient-based methods
 Numerical Optimization: Introduction and gradient-based methods Master 2 Recherche LRI Apprentissage Statistique et Optimisation Anne Auger Inria Saclay-Ile-de-France November 2011 http://tao.lri.fr/tiki-index.php?page=courses
Numerical Optimization: Introduction and gradient-based methods Master 2 Recherche LRI Apprentissage Statistique et Optimisation Anne Auger Inria Saclay-Ile-de-France November 2011 http://tao.lri.fr/tiki-index.php?page=courses
Task Description: Finding Similar Documents. Document Retrieval. Case Study 2: Document Retrieval
 Case Study 2: Document Retrieval Task Description: Finding Similar Documents Machine Learning for Big Data CSE547/STAT548, University of Washington Sham Kakade April 11, 2017 Sham Kakade 2017 1 Document
Case Study 2: Document Retrieval Task Description: Finding Similar Documents Machine Learning for Big Data CSE547/STAT548, University of Washington Sham Kakade April 11, 2017 Sham Kakade 2017 1 Document