Mesh-Based Inverse Kinematics
|
|
|
- Melina Hood
- 5 years ago
- Views:
Transcription

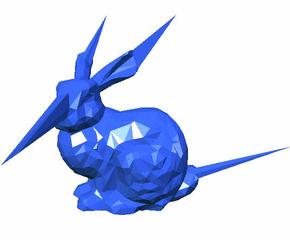
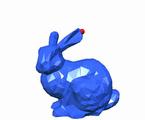
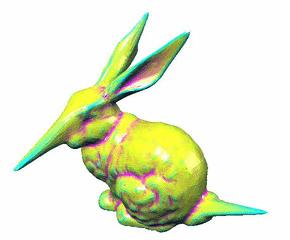
1 CS468, Wed Nov 9 th 2005 Mesh-Based Inverse Kinematics R. W. Sumner, M. Zwicker, C. Gotsman, J. Popović SIGGRAPH 2005



2 The problem 1

3 General approach Learn from experience... 2

4 As-rigid-as-possible shape interpolation [ACL00] 3
5 Outline Related work Overview of the method The method step by step Numerics Experiments 4

6 Related work Subdivision [ZSS97, KCVS98, KBS00, GSS99] 5

7 Related work Skeleton-based kinematics [JT05, ASKTR05] 6


8 Relation to mesh editing Inverse kinematics coating transfer mesh transplanting 7
 coordinates")
9 Related work Intrinsic mesh editing methods Laplacian (or differential) coordinates [SLCARS04] 8
10 Overview of the method Let M 0,, M k be the input meshes (M 0 is the reference mesh). 1. map each transformation T i (i 1) to a feature vector f i R 9m, where m is the number of triangles of the base mesh 2. define the space Σ of admissible transformations as the span of the {f i } i 1 3. given a set of specified vertex positions v 1,, v l, find a feature vector f close to Σ that maps each constrained vertex v j to a point close to its specified position v j 9
11 Feature vectors from [SP04] Given i 1, f i encodes the deformation gradients of the piecewise affine map from M 0 to M i For the j th triangle of M 0, let φ j be the affine transformation that maps linear (3x3 matrix) the triangle onto its image in M i : p R 3, φ j := T j p + t j translation vector only the gradient of φ j is encoded: Dφ j (p) = T j to make T j unique, a 4 th vertex is added to the j th triangle, along the normal direction v 1 v 3 v 4 v 2 v 3 v 4 φ j v 1 v 2 10
12 Feature vectors Given i 1, f i encodes the deformation gradients of the piecewise affine map from M 0 to M i For the j th triangle of M 0, let φ j be the affine transformation that maps linear (3x3 matrix) the triangle onto its image in M i : p R 3, φ j := T j p + t j translation vector only the gradient of φ j is encoded: Dφ j (p) = T j to make T j unique, a 4 th vertex is added to the j th triangle, along the normal direction T j = [v 1 v 4, v 2 v 4, v 3 v 4 ] [ v 1 v 4, v 2 v 4, v 3 v 4 ] 1 t j = v 4 T j v 4 10
13 Feature vectors Given i 1, f i encodes the deformation gradients of the piecewise affine map from M 0 to M i For the j th triangle of M 0, let φ j be the affine transformation that maps linear (3x3 matrix) the triangle onto its image in M i : p R 3, φ j := T j p + t j translation vector only the gradient of φ j is encoded: Dφ j (p) = T j to make T j unique, a 4 th vertex is added to the j th triangle, along the normal direction T j = [v 1 v 4, v 2 v 4, v 3 v 4 ] [ v 1 v 4, v 2 v 4, v 3 v 4 ] 1 t j = v 4 T j v 4 10
14 Feature vectors Given i 1, f i encodes the deformation gradients of the piecewise affine map from M 0 to M i (3 3) T j = [v 1 v 4, v 2 v 4, v 3 v 4 ] [ v 1 v 4, v 2 v 4, v 3 v 4 ] 1 linear in v 1, v 2, v 3, v 4 11
15 Feature vectors Given i 1, f i encodes the deformation gradients of the piecewise affine map from M 0 to M i (3 3) T j = [v 1 v 4, v 2 v 4, v 3 v 4 ] [ v 1 v 4, v 2 v 4, v 3 v 4 ] 1 G j := T j := G j x T j x T j y T j z G j y G j z linear in v 1, v 2, v 3, v 4 f i j := T j x T T j y T T j z T R 9 (9 12) = G j v 1 x. v 4 x v 1 y. v 4 y v 1 z. v 4 z R 12 11
16 Feature vectors Given i 1, f i encodes the deformation gradients of the piecewise affine map from M 0 to M i (3 3) T j = [v 1 v 4, v 2 v 4, v 3 v 4 ] [ v 1 v 4, v 2 v 4, v 3 v 4 ] 1 f i := G := f i 1. f i m G x G y = G v G z linear in v 1, v 2, v 3, v 4 f i j := T j x T T j y T T j z T R 9 (9 12) = G j v 1 x. v 4 x v 1 y. v 4 y v 1 z. v 4 z R 12 11
17 Feature vectors Given i 1, f i encodes the deformation gradients of the piecewise affine map from M 0 to M i (3 3) T j = [v 1 v 4, v 2 v 4, v 3 v 4 ] [ v 1 v 4, v 2 v 4, v 3 v 4 ] 1 f i := R 9m G := f i 1. f i m G x linear in v 1, v 2, v 3, v 4 R 3(n+m) = G v (9m 3(n + m)) G y G z (3m (n + m)) f i j := T j x T T j y T T j z T R 9 (9 12) = G j v 1 x. v 4 x v 1 y. v 4 y v 1 z. v 4 z R 12 11
18 Feature vectors Inverse transformation f = G v R 3(n+m) R 9m (9m 3(n + m)) v = G 1 f 12
19 Feature vectors Inverse transformation f = G v R 3(n+m) R 9m (9m 3(n + m)) v = G 1 f 9m > 3(n + m) G is not a square matrix To a feature vector f R 9m corresponds 1 tranformed mesh (up to translation) By fixing one vertex, one reduces the dim. to zero 12
20 Feature vectors Inverse transformation f = G v R 3(n+m) R 9m (9m 3(n + m)) v = G 1 f 9m > 3(n + m) G is not a square matrix To a feature vector f R 9m corresponds 1 tranformed mesh (up to translation) By fixing one vertex, one reduces the dim. to zero If too many constraints (or imprecisions), the set of solutions can be empty least squares problem: v = arg min v G v f most plausible positions 12
21 Linear feature space Σ := Span(f 1,, f k ) To every vector w of coordinates in the basis a feature vector f w = i w i f i R 9m ( f 1,, f k) corresponds Once one or more vertex positions are set, compute v, w = arg min G v (f 1,, f k ) w v,w 13
22 Linear feature space Σ := Span(f 1,, f k ) To every vector w of coordinates in the basis a feature vector f w = i w i f i R 9m ( f 1,, f k) corresponds Once one or more vertex positions are set, compute v, w = arg min G v (f 1,, f k ) w v,w To penalize solutions that are far from the f i, take the mean f of the f i as the origin: f w = f + k i=1 w i f i and compute: v, w = arg min v,w G v f ( f 1,, f k ) w + α w 13
23 Linear feature space 14

 f")
24 Linear feature space f ( 1 3, 2 3 ) f 1 f 2 14
25 Nonlinear feature space For each triangle j of M 0, separate the rotational component from the scale and shear components of T j by polar decomposition: T j := R j S j Interpolate the S i j linearly, but the T i j by composition: T i j (w) := k R i j w i k w i S i j R 2 θ = R 2θ i=1 i=1 15
26 Nonlinear feature space For each triangle j of M 0, separate the rotational component from the scale and shear components of T j by polar decomposition: T j := R j S j Interpolate the S i j linearly, but the T i j by composition: T i j (w) := k R i j w i k w i S i j R 2 θ = R 2θ i=1 i=1 For non-integer w i, use the exponential map: ( k ) Tj i (w) := exp w i log Rj i i=1 k w i Sj i i=1 15
27 Nonlinear feature space For each triangle j of M 0, separate the rotational component from the scale and shear components of T j by polar decomposition: T j := R j S j Interpolate the S i j linearly, but the T i j by composition: T i j (w) := k R i j w i k w i S i j R 2 θ = R 2θ i=1 i=1 For non-integer w i, use the exponential map: ( k ) Tj i (w) := exp w i log Rj i i=1 k w i Sj i i=1 To retrieve v, w, solve the following least squares problem: v, w = arg min v,w G v f w non-linear ( ) 15

28 scale/shear Nonlinear feature space linear interpolation exponential map rotational 16
29 Numerics To solve ( ), use Gauss-Newton algorithm reduces ( ) to solving a linear least squares problem at each iteration of the algorithm ( 6 iterations in practice) To accelerate the resolution of the linear least squares problem, use Cholesky decomposition see details in the paper 17
30 Experimental results one iteration Cholesky Pentium 3.4 GHz 2GB RAM 18
31 Conclusion MeshIK is an easy-to-use mesh manipulation tool, based on an intuitive interface the algorithm adapts to each model by learning from example meshes the method is effective in practice and provides interactive timings What about meshes of genus > 0? Try other feature spaces, to enhance the feature interpolation Try other numerical techniques, to enhance speed 19
SCAPE: Shape Completion and Animation of People
 SCAPE: Shape Completion and Animation of People By Dragomir Anguelov, Praveen Srinivasan, Daphne Koller, Sebastian Thrun, Jim Rodgers, James Davis From SIGGRAPH 2005 Presentation for CS468 by Emilio Antúnez
SCAPE: Shape Completion and Animation of People By Dragomir Anguelov, Praveen Srinivasan, Daphne Koller, Sebastian Thrun, Jim Rodgers, James Davis From SIGGRAPH 2005 Presentation for CS468 by Emilio Antúnez
CS 523: Computer Graphics, Spring Shape Modeling. Skeletal deformation. Andrew Nealen, Rutgers, /12/2011 1
 CS 523: Computer Graphics, Spring 2011 Shape Modeling Skeletal deformation 4/12/2011 1 Believable character animation Computers games and movies Skeleton: intuitive, low-dimensional subspace Clip courtesy
CS 523: Computer Graphics, Spring 2011 Shape Modeling Skeletal deformation 4/12/2011 1 Believable character animation Computers games and movies Skeleton: intuitive, low-dimensional subspace Clip courtesy
Deformation Transfer for Detail-Preserving Surface Editing
 Deformation Transfer for Detail-Preserving Surface Editing Mario Botsch Robert W Sumner 2 Mark Pauly 2 Markus Gross Computer Graphics Laboratory, ETH Zurich 2 Applied Geometry Group, ETH Zurich Abstract
Deformation Transfer for Detail-Preserving Surface Editing Mario Botsch Robert W Sumner 2 Mark Pauly 2 Markus Gross Computer Graphics Laboratory, ETH Zurich 2 Applied Geometry Group, ETH Zurich Abstract
Skeletal deformation
 CS 523: Computer Graphics, Spring 2009 Shape Modeling Skeletal deformation 4/22/2009 1 Believable character animation Computers games and movies Skeleton: intuitive, low dimensional subspace Clip courtesy
CS 523: Computer Graphics, Spring 2009 Shape Modeling Skeletal deformation 4/22/2009 1 Believable character animation Computers games and movies Skeleton: intuitive, low dimensional subspace Clip courtesy
Computational Design. Stelian Coros
 Computational Design Stelian Coros Schedule for presentations February 3 5 10 12 17 19 24 26 March 3 5 10 12 17 19 24 26 30 April 2 7 9 14 16 21 23 28 30 Send me: ASAP: 3 choices for dates + approximate
Computational Design Stelian Coros Schedule for presentations February 3 5 10 12 17 19 24 26 March 3 5 10 12 17 19 24 26 30 April 2 7 9 14 16 21 23 28 30 Send me: ASAP: 3 choices for dates + approximate
Example-Based Skeleton Extraction. Scott Schaefer Can Yuksel
 Example-Based Skeleton Extraction Scott Schaefer Can Yuksel Example-Based Deformation Examples Previous Work Mesh-based Inverse Kinematics [Sumner et al. 2005], [Der et al. 2006] Example-based deformation
Example-Based Skeleton Extraction Scott Schaefer Can Yuksel Example-Based Deformation Examples Previous Work Mesh-based Inverse Kinematics [Sumner et al. 2005], [Der et al. 2006] Example-based deformation
Def De orma f tion orma Disney/Pixar
 Deformation Disney/Pixar Deformation 2 Motivation Easy modeling generate new shapes by deforming existing ones 3 Motivation Easy modeling generate new shapes by deforming existing ones 4 Motivation Character
Deformation Disney/Pixar Deformation 2 Motivation Easy modeling generate new shapes by deforming existing ones 3 Motivation Easy modeling generate new shapes by deforming existing ones 4 Motivation Character
Computing and Processing Correspondences with Functional Maps
 Computing and Processing Correspondences with Functional Maps SIGGRAPH 2017 course Maks Ovsjanikov, Etienne Corman, Michael Bronstein, Emanuele Rodolà, Mirela Ben-Chen, Leonidas Guibas, Frederic Chazal,
Computing and Processing Correspondences with Functional Maps SIGGRAPH 2017 course Maks Ovsjanikov, Etienne Corman, Michael Bronstein, Emanuele Rodolà, Mirela Ben-Chen, Leonidas Guibas, Frederic Chazal,
Easy modeling generate new shapes by deforming existing ones
 Deformation I Deformation Motivation Easy modeling generate new shapes by deforming existing ones Motivation Easy modeling generate new shapes by deforming existing ones Motivation Character posing for
Deformation I Deformation Motivation Easy modeling generate new shapes by deforming existing ones Motivation Easy modeling generate new shapes by deforming existing ones Motivation Character posing for
Advanced Computer Graphics
 G22.2274 001, Fall 2009 Advanced Computer Graphics Project details and tools 1 Project Topics Computer Animation Geometric Modeling Computational Photography Image processing 2 Optimization All projects
G22.2274 001, Fall 2009 Advanced Computer Graphics Project details and tools 1 Project Topics Computer Animation Geometric Modeling Computational Photography Image processing 2 Optimization All projects
10 - ARAP and Linear Blend Skinning
 10 - ARAP and Linear Blend Skinning Acknowledgements: Olga Sorkine-Hornung As Rigid As Possible Demo Libigl demo 405 As-Rigid-As-Possible Deformation Preserve shape of cells covering the surface Ask each
10 - ARAP and Linear Blend Skinning Acknowledgements: Olga Sorkine-Hornung As Rigid As Possible Demo Libigl demo 405 As-Rigid-As-Possible Deformation Preserve shape of cells covering the surface Ask each
Assignment 5: Shape Deformation
 CSCI-GA.3033-018 - Geometric Modeling Assignment 5: Shape Deformation Goal of this exercise In this exercise, you will implement an algorithm to interactively deform 3D models. You will construct a two-level
CSCI-GA.3033-018 - Geometric Modeling Assignment 5: Shape Deformation Goal of this exercise In this exercise, you will implement an algorithm to interactively deform 3D models. You will construct a two-level
Real-Time Shape Editing using Radial Basis Functions
 Real-Time Shape Editing using Radial Basis Functions, Leif Kobbelt RWTH Aachen Boundary Constraint Modeling Prescribe irregular constraints Vertex positions Constrained energy minimization Optimal fairness
Real-Time Shape Editing using Radial Basis Functions, Leif Kobbelt RWTH Aachen Boundary Constraint Modeling Prescribe irregular constraints Vertex positions Constrained energy minimization Optimal fairness
Inverse Kinematics for Reduced Deformable Models
 To appear in SIGGRAPH 2006. Inverse Kinematics for Reduced Deformable Models Robert W. Sumner Kevin G. Der ETH Zu rich Examples Computer Science and Artificial Intelligence Laboratory Massachusetts Institute
To appear in SIGGRAPH 2006. Inverse Kinematics for Reduced Deformable Models Robert W. Sumner Kevin G. Der ETH Zu rich Examples Computer Science and Artificial Intelligence Laboratory Massachusetts Institute
CSE452 Computer Graphics
 CSE452 Computer Graphics Lecture 19: From Morphing To Animation Capturing and Animating Skin Deformation in Human Motion, Park and Hodgins, SIGGRAPH 2006 CSE452 Lecture 19: From Morphing to Animation 1
CSE452 Computer Graphics Lecture 19: From Morphing To Animation Capturing and Animating Skin Deformation in Human Motion, Park and Hodgins, SIGGRAPH 2006 CSE452 Lecture 19: From Morphing to Animation 1
Animation Lecture 10 Slide Fall 2003
 Animation Lecture 10 Slide 1 6.837 Fall 2003 Conventional Animation Draw each frame of the animation great control tedious Reduce burden with cel animation layer keyframe inbetween cel panoramas (Disney
Animation Lecture 10 Slide 1 6.837 Fall 2003 Conventional Animation Draw each frame of the animation great control tedious Reduce burden with cel animation layer keyframe inbetween cel panoramas (Disney
Inverse Kinematics for Reduced Deformable Models
 Inverse Kinematics for Reduced Deformable Models Kevin G. Der Robert W. Sumner Jovan Popović Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology ETH Zürich Examples
Inverse Kinematics for Reduced Deformable Models Kevin G. Der Robert W. Sumner Jovan Popović Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology ETH Zürich Examples
Assignment 4: Mesh Parametrization
 CSCI-GA.3033-018 - Geometric Modeling Assignment 4: Mesh Parametrization In this exercise you will Familiarize yourself with vector field design on surfaces. Create scalar fields whose gradients align
CSCI-GA.3033-018 - Geometric Modeling Assignment 4: Mesh Parametrization In this exercise you will Familiarize yourself with vector field design on surfaces. Create scalar fields whose gradients align
CS 775: Advanced Computer Graphics. Lecture 4: Skinning
 CS 775: Advanced Computer Graphics Lecture 4: http://www.okino.com/conv/skinning.htm Binding Binding Always done in a standard rest or bind pose. Binding Always done in a standard rest or bind pose. Associate
CS 775: Advanced Computer Graphics Lecture 4: http://www.okino.com/conv/skinning.htm Binding Binding Always done in a standard rest or bind pose. Binding Always done in a standard rest or bind pose. Associate
As-Rigid-As-Possible Shape Manipulation
 As-Rigid-As-Possible Shape Manipulation T. Igarashi 1, T. Mascovich 2 J. F. Hughes 3 1 The University of Tokyo 2 Brown University 3 PRESTO, JST SIGGRAPH 2005 Presented by: Prabin Bariya Interactive shape
As-Rigid-As-Possible Shape Manipulation T. Igarashi 1, T. Mascovich 2 J. F. Hughes 3 1 The University of Tokyo 2 Brown University 3 PRESTO, JST SIGGRAPH 2005 Presented by: Prabin Bariya Interactive shape
Inverse Kinematics II and Motion Capture
 Mathematical Foundations of Computer Graphics and Vision Inverse Kinematics II and Motion Capture Luca Ballan Institute of Visual Computing Comparison 0 1 A B 2 C 3 Fake exponential map Real exponential
Mathematical Foundations of Computer Graphics and Vision Inverse Kinematics II and Motion Capture Luca Ballan Institute of Visual Computing Comparison 0 1 A B 2 C 3 Fake exponential map Real exponential
Skeleton Based As-Rigid-As-Possible Volume Modeling
 Skeleton Based As-Rigid-As-Possible Volume Modeling Computer Science Department, Rutgers University As-rigid-as-possible (ARAP) shape modeling is a popular technique to obtain natural deformations. There
Skeleton Based As-Rigid-As-Possible Volume Modeling Computer Science Department, Rutgers University As-rigid-as-possible (ARAP) shape modeling is a popular technique to obtain natural deformations. There
CSE 554 Lecture 7: Deformation II
 CSE 554 Lecture 7: Deformation II Fall 2011 CSE554 Deformation II Slide 1 Review Rigid-body alignment Non-rigid deformation Intrinsic methods: deforming the boundary points An optimization problem Minimize
CSE 554 Lecture 7: Deformation II Fall 2011 CSE554 Deformation II Slide 1 Review Rigid-body alignment Non-rigid deformation Intrinsic methods: deforming the boundary points An optimization problem Minimize
2D Shape Deformation Using Nonlinear Least Squares Optimization
 2D Shape Deformation Using Nonlinear Least Squares Optimization Paper ID: 20 Abstract This paper presents a novel 2D shape deformation algorithm based on nonlinear least squares optimization. The algorithm
2D Shape Deformation Using Nonlinear Least Squares Optimization Paper ID: 20 Abstract This paper presents a novel 2D shape deformation algorithm based on nonlinear least squares optimization. The algorithm
Skinning Mesh Animations
 Doug L. James, Christopher D. Twigg Carnegie Mellon University presented by Johannes Schmid 1 Outline Introduction & Motivation Overview & Details Results Discussion 2 Introduction Mesh sequence: 3 General
Doug L. James, Christopher D. Twigg Carnegie Mellon University presented by Johannes Schmid 1 Outline Introduction & Motivation Overview & Details Results Discussion 2 Introduction Mesh sequence: 3 General
Dynamic Geometry Processing
 Dynamic Geometry Processing EG 2012 Tutorial Will Chang, Hao Li, Niloy Mitra, Mark Pauly, Michael Wand Tutorial: Dynamic Geometry Processing 1 Articulated Global Registration Introduction and Overview
Dynamic Geometry Processing EG 2012 Tutorial Will Chang, Hao Li, Niloy Mitra, Mark Pauly, Michael Wand Tutorial: Dynamic Geometry Processing 1 Articulated Global Registration Introduction and Overview
Deformation Transfer for Triangle Meshes
 Deformation Transfer for Triangle Meshes a Paper (SIGGRAPH 2004) by Robert W. Sumner & Jovan Popovic presented by Roni Oeschger Deformation Transfer Source deformed Target deformed 1 Outline of my presentation
Deformation Transfer for Triangle Meshes a Paper (SIGGRAPH 2004) by Robert W. Sumner & Jovan Popovic presented by Roni Oeschger Deformation Transfer Source deformed Target deformed 1 Outline of my presentation
Laplacian Meshes. COS 526 Fall 2016 Slides from Olga Sorkine and Yaron Lipman
 Laplacian Meshes COS 526 Fall 2016 Slides from Olga Sorkine and Yaron Lipman Outline Differential surface representation Ideas and applications Compact shape representation Mesh editing and manipulation
Laplacian Meshes COS 526 Fall 2016 Slides from Olga Sorkine and Yaron Lipman Outline Differential surface representation Ideas and applications Compact shape representation Mesh editing and manipulation
Image Coding with Active Appearance Models
 Image Coding with Active Appearance Models Simon Baker, Iain Matthews, and Jeff Schneider CMU-RI-TR-03-13 The Robotics Institute Carnegie Mellon University Abstract Image coding is the task of representing
Image Coding with Active Appearance Models Simon Baker, Iain Matthews, and Jeff Schneider CMU-RI-TR-03-13 The Robotics Institute Carnegie Mellon University Abstract Image coding is the task of representing
arxiv: v1 [cs.gr] 5 Sep 2017
![arxiv: v1 [cs.gr] 5 Sep 2017](/thumbs/90/103895300.jpg "arxiv: v1 [cs.gr] 5 Sep 2017") Sparse Data Driven Mesh Deformation arxiv:1709.01250v1 [cs.gr] 5 Sep 2017 LIN GAO, Institute of Computing Technology, Chinese Academy of Sciences YU-KUN LAI, School of Computer Science & Informatics, Cardiff
Sparse Data Driven Mesh Deformation arxiv:1709.01250v1 [cs.gr] 5 Sep 2017 LIN GAO, Institute of Computing Technology, Chinese Academy of Sciences YU-KUN LAI, School of Computer Science & Informatics, Cardiff
Skeleton-Based Shape Deformation using Simplex Transformations
 Computer Graphics International 2006 Skeleton-Based Shape Deformation using Simplex Transformations Han-Bing Yan, Shi-Min Hu and Ralph Martin Outline Motivation Introduction Mesh segmentation using skeleton
Computer Graphics International 2006 Skeleton-Based Shape Deformation using Simplex Transformations Han-Bing Yan, Shi-Min Hu and Ralph Martin Outline Motivation Introduction Mesh segmentation using skeleton
Effective Derivation of Similarity Transformations for Implicit Laplacian Mesh Editing
 Volume xx (200y), Number z, pp. 1 12 Effective Derivation of Similarity Transformations for Implicit Laplacian Mesh Editing Hongbo Fu Oscar Kin-Chung Au Chiew-Lan Tai Department of Computer Science and
Volume xx (200y), Number z, pp. 1 12 Effective Derivation of Similarity Transformations for Implicit Laplacian Mesh Editing Hongbo Fu Oscar Kin-Chung Au Chiew-Lan Tai Department of Computer Science and
Animation of 3D surfaces.
 Animation of 3D surfaces Motivations When character animation is controlled by skeleton set of hierarchical joints joints oriented by rotations the character shape still needs to be visible: visible =
Animation of 3D surfaces Motivations When character animation is controlled by skeleton set of hierarchical joints joints oriented by rotations the character shape still needs to be visible: visible =
For each question, indicate whether the statement is true or false by circling T or F, respectively.
 True/False For each question, indicate whether the statement is true or false by circling T or F, respectively. 1. (T/F) Rasterization occurs before vertex transformation in the graphics pipeline. 2. (T/F)
True/False For each question, indicate whether the statement is true or false by circling T or F, respectively. 1. (T/F) Rasterization occurs before vertex transformation in the graphics pipeline. 2. (T/F)
Animation. CS 4620 Lecture 33. Cornell CS4620 Fall Kavita Bala
 Animation CS 4620 Lecture 33 Cornell CS4620 Fall 2015 1 Announcements Grading A5 (and A6) on Monday after TG 4621: one-on-one sessions with TA this Friday w/ prior instructor Steve Marschner 2 Quaternions
Animation CS 4620 Lecture 33 Cornell CS4620 Fall 2015 1 Announcements Grading A5 (and A6) on Monday after TG 4621: one-on-one sessions with TA this Friday w/ prior instructor Steve Marschner 2 Quaternions
Homework 2 Questions? Animation, Motion Capture, & Inverse Kinematics. Velocity Interpolation. Handing Free Surface with MAC
 Homework 2 Questions? Animation, Motion Capture, & Inverse Kinematics Velocity Interpolation Original image from Foster & Metaxas, 1996 In 2D: For each axis, find the 4 closest face velocity samples: Self-intersecting
Homework 2 Questions? Animation, Motion Capture, & Inverse Kinematics Velocity Interpolation Original image from Foster & Metaxas, 1996 In 2D: For each axis, find the 4 closest face velocity samples: Self-intersecting
Kinematics. CS 448D: Character Animation Prof. Vladlen Koltun Stanford University
 Kinematics CS 448D: Character Animation Prof. Vladlen Koltun Stanford University Kinematics Kinematics: The science of pure motion, considered without reference to the matter of objects moved, or to the
Kinematics CS 448D: Character Animation Prof. Vladlen Koltun Stanford University Kinematics Kinematics: The science of pure motion, considered without reference to the matter of objects moved, or to the
Motion Capture. Motion Capture in Movies. Motion Capture in Games
 Motion Capture Motion Capture in Movies 2 Motion Capture in Games 3 4 Magnetic Capture Systems Tethered Sensitive to metal Low frequency (60Hz) Mechanical Capture Systems Any environment Measures joint
Motion Capture Motion Capture in Movies 2 Motion Capture in Games 3 4 Magnetic Capture Systems Tethered Sensitive to metal Low frequency (60Hz) Mechanical Capture Systems Any environment Measures joint
Shape Modeling and Geometry Processing
 252-0538-00L, Spring 2018 Shape Modeling and Geometry Processing Discrete Differential Geometry Differential Geometry Motivation Formalize geometric properties of shapes Roi Poranne # 2 Differential Geometry
252-0538-00L, Spring 2018 Shape Modeling and Geometry Processing Discrete Differential Geometry Differential Geometry Motivation Formalize geometric properties of shapes Roi Poranne # 2 Differential Geometry
Free-Form Deformation and Other Deformation Techniques
 Free-Form Deformation and Other Deformation Techniques Deformation Deformation Basic Definition Deformation: A transformation/mapping of the positions of every particle in the original object to those
Free-Form Deformation and Other Deformation Techniques Deformation Deformation Basic Definition Deformation: A transformation/mapping of the positions of every particle in the original object to those
Bounded Distortion Mapping and Shape Deformation
 Bounded Distortion Mapping and Shape Deformation 陈仁杰 德国马克斯普朗克计算机研究所 GAMES Web Seminar, 29 March 2018 Outline Planar Mapping & Applications Bounded Distortion Mapping Harmonic Shape Deformation Shape Interpolation
Bounded Distortion Mapping and Shape Deformation 陈仁杰 德国马克斯普朗克计算机研究所 GAMES Web Seminar, 29 March 2018 Outline Planar Mapping & Applications Bounded Distortion Mapping Harmonic Shape Deformation Shape Interpolation
05 - Surfaces. Acknowledgements: Olga Sorkine-Hornung. CSCI-GA Geometric Modeling - Daniele Panozzo
 05 - Surfaces Acknowledgements: Olga Sorkine-Hornung Reminder Curves Turning Number Theorem Continuous world Discrete world k: Curvature is scale dependent is scale-independent Discrete Curvature Integrated
05 - Surfaces Acknowledgements: Olga Sorkine-Hornung Reminder Curves Turning Number Theorem Continuous world Discrete world k: Curvature is scale dependent is scale-independent Discrete Curvature Integrated
Geometric Modeling Assignment 5: Shape Deformation
 Geometric Modeling Assignment 5: Shape Deformation Acknowledgements: Olga Diamanti, Julian Panetta Shape Deformation Step 1: Select and Deform Handle Regions Draw vertex selection with mouse H 2 Move one
Geometric Modeling Assignment 5: Shape Deformation Acknowledgements: Olga Diamanti, Julian Panetta Shape Deformation Step 1: Select and Deform Handle Regions Draw vertex selection with mouse H 2 Move one
Animation. CS 465 Lecture 22
 Animation CS 465 Lecture 22 Animation Industry production process leading up to animation What animation is How animation works (very generally) Artistic process of animation Further topics in how it works
Animation CS 465 Lecture 22 Animation Industry production process leading up to animation What animation is How animation works (very generally) Artistic process of animation Further topics in how it works
Geometric Registration for Deformable Shapes 3.3 Advanced Global Matching
 Geometric Registration for Deformable Shapes 3.3 Advanced Global Matching Correlated Correspondences [ASP*04] A Complete Registration System [HAW*08] In this session Advanced Global Matching Some practical
Geometric Registration for Deformable Shapes 3.3 Advanced Global Matching Correlated Correspondences [ASP*04] A Complete Registration System [HAW*08] In this session Advanced Global Matching Some practical
Animations. Hakan Bilen University of Edinburgh. Computer Graphics Fall Some slides are courtesy of Steve Marschner and Kavita Bala
 Animations Hakan Bilen University of Edinburgh Computer Graphics Fall 2017 Some slides are courtesy of Steve Marschner and Kavita Bala Animation Artistic process What are animators trying to do? What tools
Animations Hakan Bilen University of Edinburgh Computer Graphics Fall 2017 Some slides are courtesy of Steve Marschner and Kavita Bala Animation Artistic process What are animators trying to do? What tools
CS 231. Basics of Computer Animation
 CS 231 Basics of Computer Animation Animation Techniques Keyframing Motion capture Physics models Keyframe animation Highest degree of control, also difficult Interpolation affects end result Timing must
CS 231 Basics of Computer Animation Animation Techniques Keyframing Motion capture Physics models Keyframe animation Highest degree of control, also difficult Interpolation affects end result Timing must
Surface Parameterization
 Surface Parameterization A Tutorial and Survey Michael Floater and Kai Hormann Presented by Afra Zomorodian CS 468 10/19/5 1 Problem 1-1 mapping from domain to surface Original application: Texture mapping
Surface Parameterization A Tutorial and Survey Michael Floater and Kai Hormann Presented by Afra Zomorodian CS 468 10/19/5 1 Problem 1-1 mapping from domain to surface Original application: Texture mapping
Discrete Geometry Processing
 Non Convex Boundary Convex boundary creates significant distortion Free boundary is better Some slides from the Mesh Parameterization Course (Siggraph Asia 008) 1 Fixed vs Free Boundary Fixed vs Free Boundary
Non Convex Boundary Convex boundary creates significant distortion Free boundary is better Some slides from the Mesh Parameterization Course (Siggraph Asia 008) 1 Fixed vs Free Boundary Fixed vs Free Boundary
animation computer graphics animation 2009 fabio pellacini 1 animation shape specification as a function of time
 animation computer graphics animation 2009 fabio pellacini 1 animation shape specification as a function of time computer graphics animation 2009 fabio pellacini 2 animation representation many ways to
animation computer graphics animation 2009 fabio pellacini 1 animation shape specification as a function of time computer graphics animation 2009 fabio pellacini 2 animation representation many ways to
animation computer graphics animation 2009 fabio pellacini 1
 animation computer graphics animation 2009 fabio pellacini 1 animation shape specification as a function of time computer graphics animation 2009 fabio pellacini 2 animation representation many ways to
animation computer graphics animation 2009 fabio pellacini 1 animation shape specification as a function of time computer graphics animation 2009 fabio pellacini 2 animation representation many ways to
T6: Position-Based Simulation Methods in Computer Graphics. Jan Bender Miles Macklin Matthias Müller
 T6: Position-Based Simulation Methods in Computer Graphics Jan Bender Miles Macklin Matthias Müller Jan Bender Organizer Professor at the Visual Computing Institute at Aachen University Research topics
T6: Position-Based Simulation Methods in Computer Graphics Jan Bender Miles Macklin Matthias Müller Jan Bender Organizer Professor at the Visual Computing Institute at Aachen University Research topics
Animation of 3D surfaces
 Animation of 3D surfaces 2013-14 Motivations When character animation is controlled by skeleton set of hierarchical joints joints oriented by rotations the character shape still needs to be visible: visible
Animation of 3D surfaces 2013-14 Motivations When character animation is controlled by skeleton set of hierarchical joints joints oriented by rotations the character shape still needs to be visible: visible
CageIK: Dual-Laplacian Cage-Based Inverse Kinematics
 CageIK: Dual-Laplacian Cage-Based Inverse Kinematics Yann Savoye and Jean-Sébastien Franco LaBRI-INRIA Sud-Ouest, University of Bordeaux {yann.savoye,jean-sebastien.franco}@inria.fr Abstract. Cage-based
CageIK: Dual-Laplacian Cage-Based Inverse Kinematics Yann Savoye and Jean-Sébastien Franco LaBRI-INRIA Sud-Ouest, University of Bordeaux {yann.savoye,jean-sebastien.franco}@inria.fr Abstract. Cage-based
3D Active Appearance Model for Aligning Faces in 2D Images
 3D Active Appearance Model for Aligning Faces in 2D Images Chun-Wei Chen and Chieh-Chih Wang Abstract Perceiving human faces is one of the most important functions for human robot interaction. The active
3D Active Appearance Model for Aligning Faces in 2D Images Chun-Wei Chen and Chieh-Chih Wang Abstract Perceiving human faces is one of the most important functions for human robot interaction. The active
Texturing and Deforming Meshes with Casual Images. I-Chao Shen Yi-Hau Wang Yu-Mei Chen Bing-Yu Chen. National Taiwan University
 Volume xx (200y), Number z, pp. 1 6 Texturing and Deforming Meshes with Casual Images I-Chao Shen Yi-Hau Wang Yu-Mei Chen Bing-Yu Chen National Taiwan University arxiv:1809.03144v1 [cs.gr] 10 Sep 2018
Volume xx (200y), Number z, pp. 1 6 Texturing and Deforming Meshes with Casual Images I-Chao Shen Yi-Hau Wang Yu-Mei Chen Bing-Yu Chen National Taiwan University arxiv:1809.03144v1 [cs.gr] 10 Sep 2018
Transformation. Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering
 RBE 550 MOTION PLANNING BASED ON DR. DMITRY BERENSON S RBE 550 Transformation Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Announcement Project
RBE 550 MOTION PLANNING BASED ON DR. DMITRY BERENSON S RBE 550 Transformation Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Announcement Project
Clothed and Naked Human Shapes Estimation from a Single Image
 Clothed and Naked Human Shapes Estimation from a Single Image Yu Guo, Xiaowu Chen, Bin Zhou, and Qinping Zhao State Key Laboratory of Virtual Reality Technology and Systems School of Computer Science and
Clothed and Naked Human Shapes Estimation from a Single Image Yu Guo, Xiaowu Chen, Bin Zhou, and Qinping Zhao State Key Laboratory of Virtual Reality Technology and Systems School of Computer Science and
Kinematics. Why inverse? The study of motion without regard to the forces that cause it. Forward kinematics. Inverse kinematics
 Kinematics Inverse kinematics The study of motion without regard to the forces that cause it Forward kinematics Given a joint configuration, what is the osition of an end oint on the structure? Inverse
Kinematics Inverse kinematics The study of motion without regard to the forces that cause it Forward kinematics Given a joint configuration, what is the osition of an end oint on the structure? Inverse
Gradient-based Shell Generation and Deformation
 Gradient-based Shell Generation and Deformation Jin Huang hj@cad.zju.edu.cn Qing Wang qwang@cad.zju.edu.cn Xinguo Liu xgliu@cad.zju.edu.cn Hujun Bao bao@cad.zju.edu.cn State Key Lab of CAD&CG, Zhejiang
Gradient-based Shell Generation and Deformation Jin Huang hj@cad.zju.edu.cn Qing Wang qwang@cad.zju.edu.cn Xinguo Liu xgliu@cad.zju.edu.cn Hujun Bao bao@cad.zju.edu.cn State Key Lab of CAD&CG, Zhejiang
Improving Shape retrieval by Spectral Matching and Meta Similarity
 1 / 21 Improving Shape retrieval by Spectral Matching and Meta Similarity Amir Egozi (BGU), Yosi Keller (BIU) and Hugo Guterman (BGU) Department of Electrical and Computer Engineering, Ben-Gurion University
1 / 21 Improving Shape retrieval by Spectral Matching and Meta Similarity Amir Egozi (BGU), Yosi Keller (BIU) and Hugo Guterman (BGU) Department of Electrical and Computer Engineering, Ben-Gurion University
Locally Injective Mappings
 8/6/ Locally Injective Mappings Christian Schüller 1 Ladislav Kavan 2 Daniele Panozzo 1 Olga Sorkine-Hornung 1 1 ETH Zurich 2 University of Pennsylvania Locally Injective Mappings Popular tasks in geometric
8/6/ Locally Injective Mappings Christian Schüller 1 Ladislav Kavan 2 Daniele Panozzo 1 Olga Sorkine-Hornung 1 1 ETH Zurich 2 University of Pennsylvania Locally Injective Mappings Popular tasks in geometric
Computer Graphics: Geometric Transformations
 Computer Graphics: Geometric Transformations Geometric 2D transformations By: A. H. Abdul Hafez Abdul.hafez@hku.edu.tr, 1 Outlines 1. Basic 2D transformations 2. Matrix Representation of 2D transformations
Computer Graphics: Geometric Transformations Geometric 2D transformations By: A. H. Abdul Hafez Abdul.hafez@hku.edu.tr, 1 Outlines 1. Basic 2D transformations 2. Matrix Representation of 2D transformations
Surface Registration. Gianpaolo Palma
 Surface Registration Gianpaolo Palma The problem 3D scanning generates multiple range images Each contain 3D points for different parts of the model in the local coordinates of the scanner Find a rigid
Surface Registration Gianpaolo Palma The problem 3D scanning generates multiple range images Each contain 3D points for different parts of the model in the local coordinates of the scanner Find a rigid
On the Dimensionality of Deformable Face Models
 On the Dimensionality of Deformable Face Models CMU-RI-TR-06-12 Iain Matthews, Jing Xiao, and Simon Baker The Robotics Institute Carnegie Mellon University 5000 Forbes Avenue Pittsburgh, PA 15213 Abstract
On the Dimensionality of Deformable Face Models CMU-RI-TR-06-12 Iain Matthews, Jing Xiao, and Simon Baker The Robotics Institute Carnegie Mellon University 5000 Forbes Avenue Pittsburgh, PA 15213 Abstract
CS 523: Computer Graphics, Spring Shape Modeling. Differential Geometry of Surfaces
 CS 523: Computer Graphics, Spring 2011 Shape Modeling Differential Geometry of Surfaces Andrew Nealen, Rutgers, 2011 2/22/2011 Differential Geometry of Surfaces Continuous and Discrete Motivation Smoothness
CS 523: Computer Graphics, Spring 2011 Shape Modeling Differential Geometry of Surfaces Andrew Nealen, Rutgers, 2011 2/22/2011 Differential Geometry of Surfaces Continuous and Discrete Motivation Smoothness
Practical Least-Squares for Computer Graphics
 Outline Least Squares with Generalized Errors Robust Least Squares Constrained Least Squares Practical Least-Squares for Computer Graphics Outline Least Squares with Generalized Errors Robust Least Squares
Outline Least Squares with Generalized Errors Robust Least Squares Constrained Least Squares Practical Least-Squares for Computer Graphics Outline Least Squares with Generalized Errors Robust Least Squares
Fast and Reliable Example-Based Mesh IK for Stylized Deformations
 Fast and Reliable Example-Based Mesh IK for Stylized Deformations Kevin Wampler Adobe Systems Inc. Abstract Example-based shape deformation allows a mesh to be easily manipulated or animated with simple
Fast and Reliable Example-Based Mesh IK for Stylized Deformations Kevin Wampler Adobe Systems Inc. Abstract Example-based shape deformation allows a mesh to be easily manipulated or animated with simple
Geometric Modeling and Processing
 Geometric Modeling and Processing Tutorial of 3DIM&PVT 2011 (Hangzhou, China) May 16, 2011 6. Mesh Simplification Problems High resolution meshes becoming increasingly available 3D active scanners Computer
Geometric Modeling and Processing Tutorial of 3DIM&PVT 2011 (Hangzhou, China) May 16, 2011 6. Mesh Simplification Problems High resolution meshes becoming increasingly available 3D active scanners Computer
3D Geometry and Camera Calibration
 3D Geometr and Camera Calibration 3D Coordinate Sstems Right-handed vs. left-handed 2D Coordinate Sstems ais up vs. ais down Origin at center vs. corner Will often write (u, v) for image coordinates v
3D Geometr and Camera Calibration 3D Coordinate Sstems Right-handed vs. left-handed 2D Coordinate Sstems ais up vs. ais down Origin at center vs. corner Will often write (u, v) for image coordinates v
QP-Collide: A New Approach to Collision Treatment
 QP-Collide: A New Approach to Collision Treatment Laks Raghupathi François Faure Co-encadre par Marie-Paule CANI EVASION/GRAVIR INRIA Rhône-Alpes, Grenoble Teaser Video Classical Physical Simulation Advance
QP-Collide: A New Approach to Collision Treatment Laks Raghupathi François Faure Co-encadre par Marie-Paule CANI EVASION/GRAVIR INRIA Rhône-Alpes, Grenoble Teaser Video Classical Physical Simulation Advance
Programming, numerics and optimization
 Programming, numerics and optimization Lecture C-4: Constrained optimization Łukasz Jankowski ljank@ippt.pan.pl Institute of Fundamental Technological Research Room 4.32, Phone +22.8261281 ext. 428 June
Programming, numerics and optimization Lecture C-4: Constrained optimization Łukasz Jankowski ljank@ippt.pan.pl Institute of Fundamental Technological Research Room 4.32, Phone +22.8261281 ext. 428 June
04 - Normal Estimation, Curves
 04 - Normal Estimation, Curves Acknowledgements: Olga Sorkine-Hornung Normal Estimation Implicit Surface Reconstruction Implicit function from point clouds Need consistently oriented normals < 0 0 > 0
04 - Normal Estimation, Curves Acknowledgements: Olga Sorkine-Hornung Normal Estimation Implicit Surface Reconstruction Implicit function from point clouds Need consistently oriented normals < 0 0 > 0
Video based Animation Synthesis with the Essential Graph. Adnane Boukhayma, Edmond Boyer MORPHEO INRIA Grenoble Rhône-Alpes
 Video based Animation Synthesis with the Essential Graph Adnane Boukhayma, Edmond Boyer MORPHEO INRIA Grenoble Rhône-Alpes Goal Given a set of 4D models, how to generate realistic motion from user specified
Video based Animation Synthesis with the Essential Graph Adnane Boukhayma, Edmond Boyer MORPHEO INRIA Grenoble Rhône-Alpes Goal Given a set of 4D models, how to generate realistic motion from user specified
Georgia Institute of Technology, August 17, Justin W. L. Wan. Canada Research Chair in Scientific Computing
 Real-Time Rigid id 2D-3D Medical Image Registration ti Using RapidMind Multi-Core Platform Georgia Tech/AFRL Workshop on Computational Science Challenge Using Emerging & Massively Parallel Computer Architectures
Real-Time Rigid id 2D-3D Medical Image Registration ti Using RapidMind Multi-Core Platform Georgia Tech/AFRL Workshop on Computational Science Challenge Using Emerging & Massively Parallel Computer Architectures
Trajectory Optimization
 Trajectory Optimization Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Recap We heard about RRT*, a sampling-based planning in high-dimensional cost
Trajectory Optimization Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Recap We heard about RRT*, a sampling-based planning in high-dimensional cost
CS 130 Final. Fall 2015
 CS 130 Final Fall 2015 Name Student ID Signature You may not ask any questions during the test. If you believe that there is something wrong with a question, write down what you think the question is trying
CS 130 Final Fall 2015 Name Student ID Signature You may not ask any questions during the test. If you believe that there is something wrong with a question, write down what you think the question is trying
Computational Fluid Dynamics - Incompressible Flows
 Computational Fluid Dynamics - Incompressible Flows March 25, 2008 Incompressible Flows Basis Functions Discrete Equations CFD - Incompressible Flows CFD is a Huge field Numerical Techniques for solving
Computational Fluid Dynamics - Incompressible Flows March 25, 2008 Incompressible Flows Basis Functions Discrete Equations CFD - Incompressible Flows CFD is a Huge field Numerical Techniques for solving
Collision Detection between Dynamic Rigid Objects and Static Displacement Mapped Surfaces in Computer Games
 between Dynamic Rigid Objects and Static Displacement Mapped Surfaces in Computer Games Author:, KTH Mentor: Joacim Jonsson, Avalanche Studios Supervisor: Prof. Christopher Peters, KTH 26 June, 2015 Overview
between Dynamic Rigid Objects and Static Displacement Mapped Surfaces in Computer Games Author:, KTH Mentor: Joacim Jonsson, Avalanche Studios Supervisor: Prof. Christopher Peters, KTH 26 June, 2015 Overview
Distance Functions 1
 Distance Functions 1 Distance function Given: geometric object F (curve, surface, solid, ) Assigns to each point the shortest distance from F Level sets of the distance function are trimmed offsets F p
Distance Functions 1 Distance function Given: geometric object F (curve, surface, solid, ) Assigns to each point the shortest distance from F Level sets of the distance function are trimmed offsets F p
Style-based Inverse Kinematics
 Style-based Inverse Kinematics Keith Grochow, Steven L. Martin, Aaron Hertzmann, Zoran Popovic SIGGRAPH 04 Presentation by Peter Hess 1 Inverse Kinematics (1) Goal: Compute a human body pose from a set
Style-based Inverse Kinematics Keith Grochow, Steven L. Martin, Aaron Hertzmann, Zoran Popovic SIGGRAPH 04 Presentation by Peter Hess 1 Inverse Kinematics (1) Goal: Compute a human body pose from a set
Geometric modeling 1
 Geometric Modeling 1 Look around the room. To make a 3D model of a room requires modeling every single object you can see. Leaving out smaller objects (clutter) makes the room seem sterile and unrealistic
Geometric Modeling 1 Look around the room. To make a 3D model of a room requires modeling every single object you can see. Leaving out smaller objects (clutter) makes the room seem sterile and unrealistic
Sketching Articulation and Pose for Facial Meshes
 Sketching Articulation and Pose for Facial Meshes Edwin Chang Brown University Advisor: Odest Chadwicke Jenkins Brown University Figure 1: A reference curve (green) and target curve (blue) are sketched
Sketching Articulation and Pose for Facial Meshes Edwin Chang Brown University Advisor: Odest Chadwicke Jenkins Brown University Figure 1: A reference curve (green) and target curve (blue) are sketched
Subdivision Surfaces. Course Syllabus. Course Syllabus. Modeling. Equivalence of Representations. 3D Object Representations
 Subdivision Surfaces Adam Finkelstein Princeton University COS 426, Spring 2003 Course Syllabus I. Image processing II. Rendering III. Modeling IV. Animation Image Processing (Rusty Coleman, CS426, Fall99)
Subdivision Surfaces Adam Finkelstein Princeton University COS 426, Spring 2003 Course Syllabus I. Image processing II. Rendering III. Modeling IV. Animation Image Processing (Rusty Coleman, CS426, Fall99)
CS354 Computer Graphics Rotations and Quaternions
 Slide Credit: Don Fussell CS354 Computer Graphics Rotations and Quaternions Qixing Huang April 4th 2018 Orientation Position and Orientation The position of an object can be represented as a translation
Slide Credit: Don Fussell CS354 Computer Graphics Rotations and Quaternions Qixing Huang April 4th 2018 Orientation Position and Orientation The position of an object can be represented as a translation
Sketch Based Image Deformation
 Sketch Based Image Deformation Mathias Eitz Olga Sorkine Marc Alexa TU Berlin Email: {eitz,sorkine,marc}@cs.tu-berlin.de Abstract We present an image editing tool that allows to deform and composite image
Sketch Based Image Deformation Mathias Eitz Olga Sorkine Marc Alexa TU Berlin Email: {eitz,sorkine,marc}@cs.tu-berlin.de Abstract We present an image editing tool that allows to deform and composite image
Introduction to Robotics
 Université de Strasbourg Introduction to Robotics Bernard BAYLE, 2013 http://eavr.u-strasbg.fr/ bernard Modelling of a SCARA-type robotic manipulator SCARA-type robotic manipulators: introduction SCARA-type
Université de Strasbourg Introduction to Robotics Bernard BAYLE, 2013 http://eavr.u-strasbg.fr/ bernard Modelling of a SCARA-type robotic manipulator SCARA-type robotic manipulators: introduction SCARA-type
Interactive Deformation with Triangles
 Interactive Deformation with Triangles James Dean Palmer and Ergun Akleman Visualization Sciences Program Texas A&M University Jianer Chen Department of Computer Science Texas A&M University Abstract In
Interactive Deformation with Triangles James Dean Palmer and Ergun Akleman Visualization Sciences Program Texas A&M University Jianer Chen Department of Computer Science Texas A&M University Abstract In
Subdivision. Outline. Key Questions. Subdivision Surfaces. Advanced Computer Graphics (Spring 2013) Video: Geri s Game (outside link)
 Video: Geri s Game (outside link)") Advanced Computer Graphics (Spring 03) CS 83, Lecture 7: Subdivision Ravi Ramamoorthi http://inst.eecs.berkeley.edu/~cs83/sp3 Slides courtesy of Szymon Rusinkiewicz, James O Brien with material from Denis
Advanced Computer Graphics (Spring 03) CS 83, Lecture 7: Subdivision Ravi Ramamoorthi http://inst.eecs.berkeley.edu/~cs83/sp3 Slides courtesy of Szymon Rusinkiewicz, James O Brien with material from Denis
Non-rigid Image Registration
 Overview Non-rigid Image Registration Introduction to image registration - he goal of image registration - Motivation for medical image registration - Classification of image registration - Nonrigid registration
Overview Non-rigid Image Registration Introduction to image registration - he goal of image registration - Motivation for medical image registration - Classification of image registration - Nonrigid registration
Registration of Dynamic Range Images
 Registration of Dynamic Range Images Tan-Chi Ho 1,2 Jung-Hong Chuang 1 Wen-Wei Lin 2 Song-Sun Lin 2 1 Department of Computer Science National Chiao-Tung University 2 Department of Applied Mathematics National
Registration of Dynamic Range Images Tan-Chi Ho 1,2 Jung-Hong Chuang 1 Wen-Wei Lin 2 Song-Sun Lin 2 1 Department of Computer Science National Chiao-Tung University 2 Department of Applied Mathematics National
Motion Control (wheeled robots)
") Motion Control (wheeled robots) Requirements for Motion Control Kinematic / dynamic model of the robot Model of the interaction between the wheel and the ground Definition of required motion -> speed control,
Motion Control (wheeled robots) Requirements for Motion Control Kinematic / dynamic model of the robot Model of the interaction between the wheel and the ground Definition of required motion -> speed control,
Edge and local feature detection - 2. Importance of edge detection in computer vision
 Edge and local feature detection Gradient based edge detection Edge detection by function fitting Second derivative edge detectors Edge linking and the construction of the chain graph Edge and local feature
Edge and local feature detection Gradient based edge detection Edge detection by function fitting Second derivative edge detectors Edge linking and the construction of the chain graph Edge and local feature
Surfaces, meshes, and topology
 Surfaces from Point Samples Surfaces, meshes, and topology A surface is a 2-manifold embedded in 3- dimensional Euclidean space Such surfaces are often approximated by triangle meshes 2 1 Triangle mesh
Surfaces from Point Samples Surfaces, meshes, and topology A surface is a 2-manifold embedded in 3- dimensional Euclidean space Such surfaces are often approximated by triangle meshes 2 1 Triangle mesh
3D Geometry and Camera Calibration
 3D Geometry and Camera Calibration 3D Coordinate Systems Right-handed vs. left-handed x x y z z y 2D Coordinate Systems 3D Geometry Basics y axis up vs. y axis down Origin at center vs. corner Will often
3D Geometry and Camera Calibration 3D Coordinate Systems Right-handed vs. left-handed x x y z z y 2D Coordinate Systems 3D Geometry Basics y axis up vs. y axis down Origin at center vs. corner Will often
Lecture 4: Transforms. Computer Graphics CMU /15-662, Fall 2016
 Lecture 4: Transforms Computer Graphics CMU 15-462/15-662, Fall 2016 Brief recap from last class How to draw a triangle - Why focus on triangles, and not quads, pentagons, etc? - What was specific to triangles
Lecture 4: Transforms Computer Graphics CMU 15-462/15-662, Fall 2016 Brief recap from last class How to draw a triangle - Why focus on triangles, and not quads, pentagons, etc? - What was specific to triangles
This week. CENG 732 Computer Animation. Warping an Object. Warping an Object. 2D Grid Deformation. Warping an Object.
 CENG 732 Computer Animation Spring 2006-2007 Week 4 Shape Deformation Animating Articulated Structures: Forward Kinematics/Inverse Kinematics This week Shape Deformation FFD: Free Form Deformation Hierarchical
CENG 732 Computer Animation Spring 2006-2007 Week 4 Shape Deformation Animating Articulated Structures: Forward Kinematics/Inverse Kinematics This week Shape Deformation FFD: Free Form Deformation Hierarchical
Encoding Meshes in Differential Coordinates
 Encoding Meshes in Differential Coordinates Daniel Cohen-Or Olga Sorkine School of Computer Science Tel Aviv University Abstract Representing surfaces in local, rather than global, coordinate systems proves
Encoding Meshes in Differential Coordinates Daniel Cohen-Or Olga Sorkine School of Computer Science Tel Aviv University Abstract Representing surfaces in local, rather than global, coordinate systems proves
Pose Space Deformation A unified Approach to Shape Interpolation and Skeleton-Driven Deformation
 Pose Space Deformation A unified Approach to Shape Interpolation and Skeleton-Driven Deformation J.P. Lewis Matt Cordner Nickson Fong Presented by 1 Talk Outline Character Animation Overview Problem Statement
Pose Space Deformation A unified Approach to Shape Interpolation and Skeleton-Driven Deformation J.P. Lewis Matt Cordner Nickson Fong Presented by 1 Talk Outline Character Animation Overview Problem Statement
Computer Animation Fundamentals. Animation Methods Keyframing Interpolation Kinematics Inverse Kinematics
 Computer Animation Fundamentals Animation Methods Keyframing Interpolation Kinematics Inverse Kinematics Lecture 21 6.837 Fall 2001 Conventional Animation Draw each frame of the animation great control
Computer Animation Fundamentals Animation Methods Keyframing Interpolation Kinematics Inverse Kinematics Lecture 21 6.837 Fall 2001 Conventional Animation Draw each frame of the animation great control