Closing the Loop for Edge Detection and Object Proposals
|
|
|
- Lorena Gregory
- 5 years ago
- Views:
Transcription
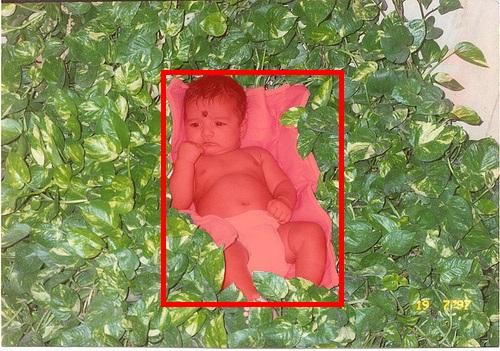
1 Closing the Loop for Edge Detection and Object Proposals Yao Lu and Linda Shapiro University of Washington {luyao, Abstract Edge grouping and object perception are unified procedures in perceptual organization. However the computer vision literature classifies them as independent tasks. In this paper, we argue that edge detection and object proposals should benefit one another. To achieve this, we go beyond bounding boxes and extract closed contours that represent potential objects within. A novel objectness metric is proposed to score and rank the proposal boxes by considering the sizes and edge intensities of the closed contours. To improve the edge detector given the top-down object proposals, we group local closed contours and construct global object hierarchies and segmentations. The edge detector is retrained and enhanced using these hierarchical segmentations as additional feature channels. In the experiments we show that by closing the loop for edge detection and object proposals, we observe improvements for both tasks. Unifying edges and object proposals is valid and useful. Introduction Edge grouping and object perception are unified procedures in human perceptual organization (Palmer 999) but are classified as independent tasks by the current computer vision literature. Take object proposal algorithms for instance. They are designed to generate very few object candidates so as to accelerate the overall object detection pipeline. Image segmentation and edge detection results are often used as their input (Arbelaez et al. 24; Krähenbühl and Koltun 24; Uijlings et al. 23; Wang et al. 25; Wang and Zhao 25; Xiao et al. 25; Zitnick and Dollár 24). To improve object proposals, many of them rely on better segmentation or edges. This dependency enables and simplifies the object perception but blocks any feedback or backward signal, from object proposals to edges, that can be useful. In this paper, we argue that edge detection and object proposals should benefit one another. To link these two major computer vision tasks, we leverage the hierarchical structure between boundaries and regions to enhance the edge detector. To achieve this, for given bounding boxes, we extract closed contours that represent potential objects within, using a simple search algorithm. The closed contours are the Copyright c 27. All rights reserved. key to both routines discussed in this paper: the boundaryto-proposal routine, and the proposal-to-boundary routine. To improve object proposals using boundaries, EdgeBox (Zitnick and Dollár 24) claims that a good proposal box should contain more boundaries inside, and less boundaries on the border. This direct translation is sub-optimal due to the gap between the bounding boxes and objects of interest, as shown in Figure. Instead, we extract closed contours that are atomic representation of objects. A novel objectness metric is proposed that measures the sizes and intensities of the closed contours, instead of the entire bounding boxes. We show that object proposals rely on observation scales. Closed contours that contribute to good proposal boxes should have the following characteristics: () they should dominate the proposal boxes in area, and (2) they should have strong intensities on, and weak intensities inside, their outline. Closed contours enable us to generate region proposals without extra effort; region proposals can be extracted directly from the proposal boxes. To improve boundaries using object proposals, our strategy is to enhance the edge detector using the object hierarchies in the scene. This top-down pipeline is in contrast to most state-of-the-art edge detectors that depend on bottomup cues (Dollár and Zitnick 23; Arbelaez et al. 2; Bertasius, Shi, and Torresani 25). However it remains an open problem to construct object hierarchies using local class-agnostic object proposals. We provide a novel solution in this paper by again leveraging the closed contours, obtained from different local proposal boxes, that already possess hierarchical structures. Based on these local contour hierarchies, global object hierarchies and segmentations for the entire image can be constructed using a grouping algorithm described later in this paper. Finally we consider global hierarchical segmentations as additional feature channels to enhance the edge detector. Given the above context, we are able to close the loop for edge detection and object proposals. We demonstrate experiments on RGB and RGB-D images to show that, by refining edges and object proposals in an iterative manner, our unified framework provides improvements on both tasks. This indicates that unifying edges and object proposals is valid and useful; these two computer vision tasks should be treated as a whole.
 and background (red). Directly transferring boxes to objectness scores is suboptimal.")
2 Figure : An example object proposal by EdgeBox (Zitnick and Dollár 24). Left: Original image with one highly ranked proposal box in red. Right: Boundaries considered to be object (green) and background (red). Directly transferring boxes to objectness scores is suboptimal. For this example, the red bounding box has multiple objects, making it a poor candidate. Related Work Object proposals and edge detection. Most object proposal algorithms use boundaries or regions as their input (Arbelaez et al. 24; Krähenbühl and Koltun 24; Uijlings et al. 23; Wang et al. 25; Wang and Zhao 25; Xiao et al. 25; Zitnick and Dollár 24). Applying better image segmentation or edge detection algorithms is an obvious pathway to improve object proposals. (Arbelaez et al. 24) enhances the normalized-cut image segmentation for later object proposal generation. (Wang et al. 25) demonstrate that multiple segmentation helps object proposal generation. EdgeBox (Zitnick and Dollár 24) utilizes a state-of-the-art Structured Edge detector (Dollár and Zitnick 23) and provides promising objectness results. (Krähenbühl and Koltun 24) propose to use geodesic segmentation as input to improve object proposals. Another category of work utilizes deep neural networks to generate more effective object segmentations and achieves good proposal performance, such as (Kuo, Hariharan, and Malik 25) and (Erhan et al. 24). On the other hand, the pathway from class-agnostic object proposals to boundaries is still unclear. In this paper, a novel method is proposed to connect object proposals back to edge detection. This enables us to close the loop for the two tasks, and we show improvements on both sides. Objectness metrics. The objectness metric proposed in this paper is inspired by the edge intensity and object closure cues for human object perception. Edge intensity, or contour strength, is effective in various object perception tasks. (Lu et al. 26) fit segment boundaries to true object boundaries according to edge intensities. EdgeBox (Zitnick and Dollár 24) to our best knowledge is the only work that utilizes edge intensities for object proposals. They use the intensities implicitly to cluster the edges and assign weights to different edge groups. In this paper we explicitly use the edge intensity cue to measure the objectness of a given closed contour. Object closure, on the other hand, is widely applied in various computer vision tasks (Karpathy, Miller, and Fei- Fei 23; Levinshtein, Sminchisescu, and Dickinson 2; Cheng et al. 24; Lu et al. 2; 22), among which BING (Cheng et al. 24) utilizes the gradient closure to indicate objects. In this paper, we further aim at a contour level of object closure that is more challenging due to false and missing edges. Hierarchical image segmentation. State-of-the-art image segmentation and edge detection frameworks aim to produce hierarchical representation of the objects in the scene, such as the probabilistic boundaries (Arbelaez et al. 2), sparse-coding-based approach (Xiaofeng and Bo 22), and Structured Edge detector (Dollár and Zitnick 23). These methods rely on bottom-up information of low-level edge intensities. In this paper, a different aspect of this problem is studied; the hierarchical structure of object proposals is recovered initially, while hierarchical segmentations are generated using such top-down objectness cues. This high-level hierarchical segmentation is fed to improve the edge detector afterwards. Closed contour extraction. To represent potential objects given continuous edge intensities, previously closed contours are extracted using the ultrametric contour map (UCM) (Arbelaez et al. 2), or the structured edge (Chen, Yang, and Yang 25) algorithms. In this paper, we propose a new closed contour extraction algorithm based on a simple but effective search strategy. (Pinheiro, Collobert, and Dollar 25) propose an algorithm to extract soft object masks within candidate boxes using a deep neural network. (Arbelaez et al. 24) also provides region proposals using a combination of segments. Our system is different from these; the proposed closed contour extraction algorithm is fully unsupervised, while the above approaches (Pinheiro, Collobert, and Dollar 25; Arbelaez et al. 24) require multiple training images. Retrained edge detector Boundaries Begin Edge-based proposal Global object hierarchies Initial object proposals Proposal to boundary Boundary to proposal Proposal box Grouping Closed contour extraction Refined object proposals Local closed contours Scoring and reranking Figure 2: Closing the loop for object proposals and edge detection. Our pipeline starts with an edge detector (Begin). The boundary-to-proposal and the proposal-toboundary routines are displayed in yellow and green regions respectively. Framework We aim to close the loop for object proposals and edge detection. Figure 2 summarizes the pipeline of our closing-theloop framework. Given the initial object proposal boxes produced by an edge-based objectness approach such as Edge- Box (Zitnick and Dollár 24), we extract the closed contours, which we define as groups of edges that constitute the outlines of potential objects, from each box. We then evaluate the closed contours using a novel metric to produce refined object proposals. Next we construct global object hierarchies and segmentations by grouping the local proposal boxes and closed contours. The hierarchical segmentations are treated as additional feature channels for a retrained edge detector to produce better boundaries. Finally the refined boundaries are fed into the edge-based object proposer for a new round of the process. The loops here are infinite but in our experiments we observe that they converge quickly after three or four loops. In the following sections we describe each separate module in detail.





), we first cluster the boundary pixels into edge groups according to their similar intensities, orientations, and connectivities, as is done in")
3 (a) (b) (c) (d) Figure 3: (a) Given a bounding box, we group boundary pixels into edge groups. (b) Different colors represent different edge groups. (c) Zooming in on the rectangular region in (b). Our search algorithm finds loops of edge groups represented by a sequence of terminal points in red. The algorithm forks in this example. (d) Resulting closed contours form a local hierarchy; larger contours contain smaller ones. Principal closed contours are shown in green, non-principal closed contours in red. Closed contour extraction Proposal boxes generated by objectness approaches are noisy and may contain no object, part of an object, or multiple objects. Neither background models (Rother, Kolmogorov, and Blake 24) nor Hough-like techniques (Gall and Lempitsky 23; Maji and Malik 29) are feasible to extract single and complete objects, since they have arbitrary shapes. We leverage closed contours that are atomic representation of objects within the proposal boxes. We will discuss later in this section how single and complete objects can be extracted using the closed contours. Given the edge map E and the orientation map O produced by an edge detector (e.g., the Structured Edge detector (Dollár and Zitnick 23)), we first cluster the boundary pixels into edge groups according to their similar intensities, orientations, and connectivities, as is done in EdgeBox (Zitnick and Dollár 24). Each edge group has two or more terminal points. The closed contour is then a set of edge groups, represented by a sequence of terminal points, that () form a closed loop, and (2) lie fully within the bounding box. The algorithm to extract candidate closed contours within a bounding box b is described below and illustrated in Figure 3.. For a given terminal point t n belonging to edge group e n, find a terminal point t 2 n that belongs to the same edge group. Add t n and t 2 n to the current path. If more than two terminal points exist for e n, fork. 2. For terminal point t 2 n, search within a radius r inside the bounding box b for its neighboring terminal point t n+ that belongs to another edge group. Add t n+ to the current path. If two or more terminal points are found, fork. 3. Go to step, recursively find the next terminal point until all the reachable edge groups in b are visited. If a loop is found during the search, add its path to the result C b. We set the search radius r >, so that disconnected edges can be found during the search. To initialize the algorithm, we randomly pick a starting terminal point near the bounding box boundary. Each bounding box ultimately yields one or more closed contours if there is an object inside. Local hierarchy of closed contours. Since we recursively search for every possible closed loop within a given bounding box, the closed contours already possess a local hierarchical structure; larger closed contours contain smaller ones, as shown in Figures 3(d). This important property is leveraged in the proposal box grouping algorithm described later Figure 4: Left: Size is a critical factor for object proposals. A good proposal box should contain an object that occupies the majority of the area. Red and blue contours correspond to the principal closed contours of the red and the blue bounding boxes. Objects contribute to the bounding boxes of their scale. Right: po-nms is applied on proposal boxes that share a common principal object in red. Overlapping boxes are shrunk to fit the common principal object. The green box is the result after merging and shrinking. in this paper. The boundary-to-proposal routine What is a good proposal box? We study the good criteria for good object proposal boxes. Once we obtain the closed contours within a proposal box, the objectness criteria are two-fold: () Size. Object perception highly depends on the observation scale. A good proposal box should contain one single object; only that object can be used to measure the objectness of the box. In other words, the closed contour should occupy a majority of the area in that proposal box. For objects with hierarchical parts, size remains a critical factor. Since object parts are also objects, a good proposal box for the part should still contain only one object that is the largest in area. Consequently, object parts contribute to the proposal boxes of their scale, instead of to the bounding boxes containing the whole objects. Taking Figure 4 (left) for an example, the pillow contributes to the red bounding box instead of to the blue one. Meanwhile, for the blue bounding box, only the chair can be recognized as the object of interest due to its size. (2) Intensity. Edge strength is effective during human object perception (Kellman and Shipley 99; Palmer 999), and it reflects true object boundaries on a high level. That is, inter-object edges are more likely to have strong intensities. This is the goal for most state-of-the-art edge detection frameworks (Dollár and Zitnick 23; Arbelaez et al. 2; Bertasius, Shi, and Torresani 25). In our objectness metric, another criterion is the ratio of edge intensities on the object boundary versus those inside the object. Proposal boxes containing multiple objects should get low objectness scores either due to: () the size for the object of interest is relatively small, since there are other objects in the box, or (2) there are edges with strong intensities within the object of interest, and those edges are more likely to be inter-object boundaries. Scoring proposal boxes by the principal objects. Given a candidate closed contour cc within a bounding box b, the metric to measure the objectness for cc is: s(cc) = area(cc)γ area(b) ( avg(i cc) avg(i ic ) )λ () where ic represents the inner edges within cc, and avg(i cc ) is the average intensity on cc (intensities between disconnected terminal points are zero). λ weights between the size
 found in the proposal boxes of those colors.")
 Resulting global object hierarchy. and intensity factors, and γ penalizes small loops caused by noisy edges.")
.")
, to remove false-positive detections. We simply extend this idea to the principal objects.")
4 (a) Figure 5: (a) A set of input proposal boxes. (b) The set of input principal closed contours, each of which corresponds to an input proposal box in (a). Rectangles with different colors contain the closed contours (in yellow) found in the proposal boxes of those colors. For example, the red proposal box contains all the closed contours, while the blue proposal box contains the last three closed contours. Our grouping algorithm finds global hierarchies upon local closed contour hierarchies. (c) Resulting global object hierarchy. and intensity factors, and γ penalizes small loops caused by noisy edges. The objectness for bounding box b is then recognized as the maximum score for all the candidate closed contours: S(b) = max cc C b s(cc) (2) We denote the principal object, or the principal closed contour, as the object with the maximum objectness in its corresponding proposal box. Non-maximum suppression on the principal objects (po- NMS). Given that nearby bounding boxes often belong to the same object, non-maximum suppression (NMS) is used in current object detection systems, e.g., (Felzenszwalb et al. 2), to remove false-positive detections. We simply extend this idea to the principal objects. Given a set of bounding boxes, false-positive detections can be eliminated if they share a common principal object. Further, the final bounding box is shrunk to fit the principal object for refinement. Figure 4 (right) illustrates an example. Generating refined box/region proposals. After evaluating the objectness for all initial proposal boxes, we apply po-nms and then re-rank the boxes to obtain refined object proposals in box representation. To generate region proposals, we simply take the principal closed contour as one region proposal for each refined proposal box. The proposal-to-boundary routine Grouping the proposal boxes. Recall that for given proposal boxes we extract closed contours that already possess local hierarchical structures. Constructing the global object hierarchies can be achieved by grouping the refined proposal boxes and closed contours at different scales. We describe the grouping algorithm in Alg.. The algorithm takes as input C P, the set of principal closed contours, each of which corresponds to a proposal box. Then a non-overlapping subset of closed contours are found, which represent different objects or parts. Larger closed contours in the subset are linked to the smaller closed contours (children) they contain, according to the local hierarchies already extracted. This process is done recursively until reaching the leaf closed contours that contain no inner loop. c.children denotes the children closed contours of c that are principal closed contours corresponding to other smaller proposal boxes. Non-principal closed contours are (c) Algorithm : Grouping proposal boxes Name: clusterccs(c P ) Steps: h, C ; sort C P by area in descending order. for pcc in C P do if pcc / C and c C, pcc / c.children, then C = C pcc. for c C do if c.children >, then h h clusterccs(c P - C). else h = h {c}. return {h} in a tree structure. Figure 6: An example of the global hierarchical segmentations. Left to right: original image, boundary groundtruth, seg 4, seg 3, seg 2. not considered here due to their weak objectness. The algorithm ultimately yields the global hierarchical structure of the principal closed contours and proposal boxes. Note that the final result may consist of multiple trees, generated from non-overlapping object proposal boxes. Figure 5 shows an example of the grouping algorithm. Constructing hierarchical segmentations. It is straightforward to construct hierarchical segmentations for the objects in the scene. Traversing from the leaf nodes to the roots in the object hierarchies, the closed contours are drawn and used to generate the segmentation for each layer in the hierarchy. Straight lines are placed between disconnected terminal points that belong to different edge groups, so as to make contours fully closed. Each closed contour is filled and labeled with its depth in the hierarchy. We denote seg,..., seg t as the t hierarchical segmentations obtained. seg is the finest segmentation and seg t is the coarsest. The finest four segmentations seg,.., seg 4 are used in practice, since in our experiments we find they are more informative. Figure 6 shows examples of the hierarchical segmentations. Training the enhanced edge detector. (Dollár and Zitnick 23) take the intensities from different color channels as input to train the Structured Edge detector. (Gupta et al. 24) extend their framework and propose a RGB-D boundary detector by taking the depth values as an additional feature channel to the Structured Edge detector. Inspired by this simple but effective approach, we similarly treat the hierarchical segmentations as additional feature channels to the input. Before training the enhanced edge detector, we run one pass of the object proposal and closed contour grouping algorithm on the training set to generate the hierarchical segmentations. We leverage seg,.., seg 4 as four additional feature channels for training. The detailed training procedures are described in (Dollár and Zitnick 23). Finally at test time, we utilize the retrained edge detector to produce new boundaries for each proposal-to-boundary routine in our closing-the-loop framework.
5 Implementation details We note several details in our implementation. To extract closed contours, the search space is large. Hence to reduce the computational complexity is critical. For terminal points with direct connection to other terminal points, the search radius r can be set low; we use r = 3px. For terminal points without direct connection, r is set to be 5% of the bounding box size to ensure all the loops can be found. We perform a pre-pass on the entire image, aiming to eliminate small loops and cache the paths for valid loops. Further, due to the hierarchical structure of closed contours, we store results for small candidate boxes and reuse them for larger ones. To close the loop for edges and object proposals, we set a threshold on the objectness score before grouping the closed contours. This is to reduce noise from pool-ranked candidate boxes. Meanwhile we set λ =.8 to put more weight on the size factor. Experiments We connect and bootstrap the edge detection and object proposal routines described in the above sections. We show in our experiments how they can improve one another, i.e., how they perform on state-of-the-art datasets and benchmarks after several algorithmic iterations. Quantitative Evaluations To follow the object proposal evaluation routine, we leverage the Pascal VOC 22 (Everingham et al. 2) dataset with RGB images, and the NYU-D (Silberman et al. 22) dataset with RGB-D images. For the later dataset we apply the training-testing split from (Gupta et al. 24), which contains 795 training images. The detection rate (recall) versus the number of candidate boxes, and the area under curve (AUC) are reported. The intersection over union (IOU) metric over bounding boxes is used in comparing results with ground truth, as is applied in most current object proposal methods (Zitnick and Dollár 24; Cheng et al. 24; Uijlings et al. 23; Wang et al. 25). A good object proposal algorithm should propose as few candidate boxes as possible while maintaining a high recall rate. The quantitative evaluations of our boundary-to-proposal routine is demonstrated in Figure 7 and Table 2 with IOU=.7 and number of candidate boxes=. We compare with EB (Zitnick and Dollár 24), (Arbeláez et al. 22), SS (Uijlings et al. 23), and BING (Cheng et al. 24). We observe a clear improvement when boundaries and object proposals are connected. On the NYU-D dataset, our framework improves.6% AUC for object proposals in iteration and 2.7% AUC in iteration 2. Meanwhile on the Pascal VOC 22 dataset, we obtain about 3% improvement in iteration and % in iteration 2. Note that in iteration we leverage the edges from (Dollár and Zitnick 23) and the object proposals from (Zitnick and Dollár 24) as initial inputs. After only three iterations, our method achieves comparable performance to the state-of-the-art and does even better with fewer candidate boxes. On the NYU-D dataset, outperforms our approach with high number of candidate boxes as they train to rank the proposed regions, SS BING Ours-iter, EB Ours-iter # of proposals PASCAL VOC2 IOU =.7 Ours-iter, EB.8 Ours-iter # of proposals NYU-D IOU = SS BING Ours-iter, EB Ours-iter IoU #= Ours-iter, EB.8 Ours-iter IoU #= Figure 7: Quantitative evaluation of object proposals on the Pascal VOC22 validation (RGB) and the NYU-D test (RGB-D) datasets. Our results are shown in dotted to solid lines in blue, representing iteration,,3 respectively. BSD5 NYUD Method ODS OIS AP ODS OIS AP gpb SC SE N 4 -fields DeepEdge Ours-iter, SE Ours-iter Ours-iter Table : Quantitative evaluations for edges on the BSD5 (RGB) and NYU-D (RGB-D) datasets at iteration to 3. while our objectness metric is unsupervised. Our framework converges quickly after iteration 4 on both datasets. To evaluate our proposal-to-boundary routine, we leverage the BSD5 (Arbelaez et al. 2) and the NYU-D datasets. We apply the evaluation metrics in (Arbelaez et al. 2; Dollár and Zitnick 23), measuring fixed contour threshold (ODS), per-image best threshold (OIS) and average precision (AP). Table reports the evaluation results. We compare with gpb (Arbelaez et al. 2), SC (Xiaofeng and Bo 22), SE (Dollár and Zitnick 23), SE+ (Gupta, Arbelaez, and Malik 23), N 4 -fields (Ganin and Lempitsky 24), and DeepEdge (Bertasius, Shi, and Torresani 25). Again, we observe improvements to the edges when object proposals are connected. Note that the BSD5 dataset is not designed for object detection; each image has only one major object. Connecting edge detection and object proposals yields less improvement than on the NYU-D dataset. Qualitative Evaluations Figure 8 demonstrates the boundaries and hierarchical segmentations produced by our algorithm. We further show in Figure 9 the intermediate boundaries at iterations,,2 on the NYU-D dataset. The resulting boundaries gradually fit

















, while")


6 Figure 8: Closing the loop on the NYU-D dataset. Left to right: original image, depth map, hierarchical segmentation assembled using Seg4 (color) and Seg2 (boundaries), initial edges, edges after iteration 4, and ground truth. Edge detections are before NMS. Our refined edge detector produces edges that better fit the object hierarchies: intensities are stronger for inter-object edges and weaker for intra-object edges. Figure 9: Intermediate boundaries when the loop runs. Left to right: original image, ground truth, boundaries for iteration,, and 2. We show that the boundaries gradually fit the object hierarchies, e.g., the edges pointed to by the red arrows. Method SE& EdgeBox SC& EdgeBox SE& Iteration Proposal AUC Edge AP Proposal AUC Edge AP Proposal AUC Edge AP Table 2: Figure : Demonstration of our box and region proposals on the Pascal VOC 22 validation set. Region proposals are recognized as the principal closed contours for each candidate box. The top ranked proposals are shown. the object hierarchies in the scene; inter-object edges become stronger and inner-object edges become weaker, e.g., the sofa and the basket in Figure 8 and 9. Figure shows examples of the region proposals generated by our closed contour algorithm. As described previously, extracting object shapes within proposals boxes can be achieved without additional cost. In summary, all the above quantitative and qualitative results indicate that object proposals provide useful information to help edge detection, in strengthening important edges as well as in removing noisy edges. Better boundaries, on the other hand, help object proposals, as is already achieved by many object proposal algorithms. These two tasks are able to help one another in an iterative manner. Finally, we are interested in how our closing-the-loop framework can be applied on generic edge detection and ob- Closing the loop on the NYU-D (RGB-D) dataset with different edge detection and object proposal combinations. For object proposals, IOU =.7. Proposal AUC is measured with # of boxes=. ject proposal algorithms. As shown in Table 2, we replace SE with SC (Xiaofeng and Bo 22), while EdgeBox is replaced with (Arbelaez et al. 24). SC is trained similarly as SE with additional feature channels from the hierarchical segmentations. All experimental settings yield satisfying improvements, indicating that our closing-the-loop framework is generic and valid to many current edge detection and object proposal algorithms. These two major computer vision tasks should be treated as a whole. Conclusions We present a unified framework for bootstrapping object proposals and edge detection. This closing-the-loop strategy combines top-down objectness cues with bottom-up boundary cues, leading to meaningful improvement that facilitates future research in other computer vision tasks related to object perception, such as semantic segmentation and object detection.
7 References Arbelaez, P.; Maire, M.; Fowlkes, C.; and Malik, J. 2. Contour detection and hierarchical image segmentation. TPAMI 33(5): Arbeláez, P.; Hariharan, B.; Gu, C.; Gupta, S.; Bourdev, L.; and Malik, J. 22. Semantic segmentation using regions and parts. In CVPR. Arbelaez, P.; Pont-Tuset, J.; Barron, J.; Marques, F.; and Malik, J. 24. Multiscale combinatorial grouping. In CVPR. Bertasius, G.; Shi, J.; and Torresani, L. 25. Deepedge: A multi-scale bifurcated deep network for top-down contour detection. In CVPR. Chen, Y.-T.; Yang, J.; and Yang, M.-H. 25. Extracting image regions by structured edge prediction. In WACV. Cheng, M.-M.; Zhang, Z.; Lin, W.-Y.; and Torr, P. 24. Bing: Binarized normed gradients for objectness estimation at 3fps. In CVPR. Dollár, P., and Zitnick, C. L. 23. Structured forests for fast edge detection. In ICCV. Erhan, D.; Szegedy, C.; Toshev, A.; and Anguelov, D. 24. Scalable object detection using deep neural networks. In CVPR. Everingham, M.; Van Gool, L.; Williams, C. K.; Winn, J.; and Zisserman, A. 2. The pascal visual object classes (voc) challenge. IJCV 88(2): Felzenszwalb, P. F.; Girshick, R. B.; McAllester, D.; and Ramanan, D. 2. Object detection with discriminatively trained part-based models. TPAMI 32(9): Gall, J., and Lempitsky, V. 23. Class-specific hough forests for object detection. In Decision forests for computer vision and medical image analysis. Springer Ganin, Y., and Lempitsky, V. 24. Nˆ 4-fields: Neural network nearest neighbor fields for image transforms. In ACCV Gupta, S.; Arbelaez, P.; and Malik, J. 23. Perceptual organization and recognition of indoor scenes from rgb-d images. In CVPR. Gupta, S.; Girshick, R.; Arbeláez, P.; and Malik, J. 24. Learning rich features from rgb-d images for object detection and segmentation. In ECCV. Karpathy, A.; Miller, S.; and Fei-Fei, L. 23. Object discovery in 3d scenes via shape analysis. In ICRA. Kellman, P. J., and Shipley, T. F. 99. A theory of visual interpolation in object perception. Cognitive psychology 23(2):4 22. Krähenbühl, P., and Koltun, V. 24. Geodesic object proposals. In ECCV. Kuo, W.; Hariharan, B.; and Malik, J. 25. Deepbox: Learning objectness with convolutional networks. arxiv preprint arxiv: Levinshtein, A.; Sminchisescu, C.; and Dickinson, S. 2. Optimal contour closure by superpixel grouping. In ECCV. Lu, Y.; Zhang, W.; Lu, H.; and Xue, X. 2. Salient object detection using concavity context. In ICCV. Lu, Y.; Zhang, W.; Jin, C.; and Xue, X. 22. Learning attention map from images. In CVPR. Lu, Y.; Bai, X.; Shapiro, L.; and Wang, J. 26. Coherent parametric contours for interactive video object segmentation. In CVPR. Maji, S., and Malik, J. 29. Object detection using a maxmargin hough transform. In CVPR. Palmer, S. E Vision science: Photons to phenomenology, volume. MIT press Cambridge, MA. Pinheiro, P. O.; Collobert, R.; and Dollar, P. 25. Learning to segment object candidates. arxiv preprint arxiv: Rother, C.; Kolmogorov, V.; and Blake, A. 24. Grabcut: Interactive foreground extraction using iterated graph cuts. TOG 23(3): Silberman, N.; Hoiem, D.; Kohli, P.; and Fergus, R. 22. Indoor segmentation and support inference from rgbd images. In ECCV. Uijlings, J. R.; van de Sande, K. E.; Gevers, T.; and Smeulders, A. W. 23. Selective search for object recognition. volume 4, Wang, X. C. H. M. X., and Zhao, Z. 25. Improving object proposals with multi-thresholding straddling expansion. CVPR. Wang, C.; Zhao, L.; Liang, S.; Zhang, L.; Jia, J.; and Wei, Y. 25. Object proposal by multi-branch hierarchical segmentation. CVPR. Xiao, Y.; Lu, C.; Tsougenis, E.; Lu, Y.; and Tang, C.-K. 25. Complexity-adaptive distance metric for object proposals generation. In CVPR. Xiaofeng, R., and Bo, L. 22. Discriminatively trained sparse code gradients for contour detection. In NIPS. Zitnick, C. L., and Dollár, P. 24. Edge boxes: Locating object proposals from edges. In ECCV.
Deep learning for object detection. Slides from Svetlana Lazebnik and many others
 Deep learning for object detection Slides from Svetlana Lazebnik and many others Recent developments in object detection 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before deep
Deep learning for object detection Slides from Svetlana Lazebnik and many others Recent developments in object detection 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before deep
Object detection with CNNs
 Object detection with CNNs 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before CNNs After CNNs 0% 2006 2007 2008 2009 2010 2011 2012 2013 2014 2015 2016 year Region proposals
Object detection with CNNs 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before CNNs After CNNs 0% 2006 2007 2008 2009 2010 2011 2012 2013 2014 2015 2016 year Region proposals
DeepBox: Learning Objectness with Convolutional Networks
 DeepBox: Learning Objectness with Convolutional Networks Weicheng Kuo Bharath Hariharan Jitendra Malik University of California, Berkeley {wckuo, bharath2, malik}@eecs.berkeley.edu Abstract Existing object
DeepBox: Learning Objectness with Convolutional Networks Weicheng Kuo Bharath Hariharan Jitendra Malik University of California, Berkeley {wckuo, bharath2, malik}@eecs.berkeley.edu Abstract Existing object
DEPTH-AWARE LAYERED EDGE FOR OBJECT PROPOSAL
 DEPTH-AWARE LAYERED EDGE FOR OBJECT PROPOSAL Jing Liu 1, Tongwei Ren 1,, Bing-Kun Bao 1,2, Jia Bei 1 1 State Key Laboratory for Novel Software Technology, Nanjing University, China 2 National Laboratory
DEPTH-AWARE LAYERED EDGE FOR OBJECT PROPOSAL Jing Liu 1, Tongwei Ren 1,, Bing-Kun Bao 1,2, Jia Bei 1 1 State Key Laboratory for Novel Software Technology, Nanjing University, China 2 National Laboratory
Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks
 Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks Shaoqing Ren, Kaiming He, Ross Girshick, and Jian Sun Presented by Tushar Bansal Objective 1. Get bounding box for all objects
Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks Shaoqing Ren, Kaiming He, Ross Girshick, and Jian Sun Presented by Tushar Bansal Objective 1. Get bounding box for all objects
Texture Complexity based Redundant Regions Ranking for Object Proposal
 26 IEEE Conference on Computer Vision and Pattern Recognition Workshops Texture Complexity based Redundant Regions Ranking for Object Proposal Wei Ke,2, Tianliang Zhang., Jie Chen 2, Fang Wan, Qixiang
26 IEEE Conference on Computer Vision and Pattern Recognition Workshops Texture Complexity based Redundant Regions Ranking for Object Proposal Wei Ke,2, Tianliang Zhang., Jie Chen 2, Fang Wan, Qixiang
REGION AVERAGE POOLING FOR CONTEXT-AWARE OBJECT DETECTION
 REGION AVERAGE POOLING FOR CONTEXT-AWARE OBJECT DETECTION Kingsley Kuan 1, Gaurav Manek 1, Jie Lin 1, Yuan Fang 1, Vijay Chandrasekhar 1,2 Institute for Infocomm Research, A*STAR, Singapore 1 Nanyang Technological
REGION AVERAGE POOLING FOR CONTEXT-AWARE OBJECT DETECTION Kingsley Kuan 1, Gaurav Manek 1, Jie Lin 1, Yuan Fang 1, Vijay Chandrasekhar 1,2 Institute for Infocomm Research, A*STAR, Singapore 1 Nanyang Technological
Lecture 5: Object Detection
 Object Detection CSED703R: Deep Learning for Visual Recognition (2017F) Lecture 5: Object Detection Bohyung Han Computer Vision Lab. bhhan@postech.ac.kr 2 Traditional Object Detection Algorithms Region-based
Object Detection CSED703R: Deep Learning for Visual Recognition (2017F) Lecture 5: Object Detection Bohyung Han Computer Vision Lab. bhhan@postech.ac.kr 2 Traditional Object Detection Algorithms Region-based
Supplementary Material: Unconstrained Salient Object Detection via Proposal Subset Optimization
 Supplementary Material: Unconstrained Salient Object via Proposal Subset Optimization 1. Proof of the Submodularity According to Eqns. 10-12 in our paper, the objective function of the proposed optimization
Supplementary Material: Unconstrained Salient Object via Proposal Subset Optimization 1. Proof of the Submodularity According to Eqns. 10-12 in our paper, the objective function of the proposed optimization
Gradient of the lower bound
 Weakly Supervised with Latent PhD advisor: Dr. Ambedkar Dukkipati Department of Computer Science and Automation gaurav.pandey@csa.iisc.ernet.in Objective Given a training set that comprises image and image-level
Weakly Supervised with Latent PhD advisor: Dr. Ambedkar Dukkipati Department of Computer Science and Automation gaurav.pandey@csa.iisc.ernet.in Objective Given a training set that comprises image and image-level
HIERARCHICAL JOINT-GUIDED NETWORKS FOR SEMANTIC IMAGE SEGMENTATION
 HIERARCHICAL JOINT-GUIDED NETWORKS FOR SEMANTIC IMAGE SEGMENTATION Chien-Yao Wang, Jyun-Hong Li, Seksan Mathulaprangsan, Chin-Chin Chiang, and Jia-Ching Wang Department of Computer Science and Information
HIERARCHICAL JOINT-GUIDED NETWORKS FOR SEMANTIC IMAGE SEGMENTATION Chien-Yao Wang, Jyun-Hong Li, Seksan Mathulaprangsan, Chin-Chin Chiang, and Jia-Ching Wang Department of Computer Science and Information
arxiv: v4 [cs.cv] 6 Jul 2016
![arxiv: v4 [cs.cv] 6 Jul 2016](/thumbs/93/112985717.jpg "arxiv: v4 [cs.cv] 6 Jul 2016") Object Boundary Guided Semantic Segmentation Qin Huang, Chunyang Xia, Wenchao Zheng, Yuhang Song, Hao Xu, C.-C. Jay Kuo (qinhuang@usc.edu) arxiv:1603.09742v4 [cs.cv] 6 Jul 2016 Abstract. Semantic segmentation
Object Boundary Guided Semantic Segmentation Qin Huang, Chunyang Xia, Wenchao Zheng, Yuhang Song, Hao Xu, C.-C. Jay Kuo (qinhuang@usc.edu) arxiv:1603.09742v4 [cs.cv] 6 Jul 2016 Abstract. Semantic segmentation
Object Detection Based on Deep Learning
 Object Detection Based on Deep Learning Yurii Pashchenko AI Ukraine 2016, Kharkiv, 2016 Image classification (mostly what you ve seen) http://tutorial.caffe.berkeleyvision.org/caffe-cvpr15-detection.pdf
Object Detection Based on Deep Learning Yurii Pashchenko AI Ukraine 2016, Kharkiv, 2016 Image classification (mostly what you ve seen) http://tutorial.caffe.berkeleyvision.org/caffe-cvpr15-detection.pdf
Deformable Part Models
 CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
Fast Edge Detection Using Structured Forests
 Fast Edge Detection Using Structured Forests Piotr Dollár, C. Lawrence Zitnick [1] Zhihao Li (zhihaol@andrew.cmu.edu) Computer Science Department Carnegie Mellon University Table of contents 1. Introduction
Fast Edge Detection Using Structured Forests Piotr Dollár, C. Lawrence Zitnick [1] Zhihao Li (zhihaol@andrew.cmu.edu) Computer Science Department Carnegie Mellon University Table of contents 1. Introduction
arxiv: v3 [cs.cv] 21 Sep 2015
![arxiv: v3 [cs.cv] 21 Sep 2015](/thumbs/88/115998839.jpg "arxiv: v3 [cs.cv] 21 Sep 2015") High-for-Low and Low-for-High: Efficient Boundary Detection from Deep Object Features and its Applications to High-Level Vision arxiv:1504.06201v3 [cs.cv] 21 Sep 2015 Gedas Bertasius University of Pennsylvania
High-for-Low and Low-for-High: Efficient Boundary Detection from Deep Object Features and its Applications to High-Level Vision arxiv:1504.06201v3 [cs.cv] 21 Sep 2015 Gedas Bertasius University of Pennsylvania
Object Proposal by Multi-branch Hierarchical Segmentation
 Object Proposal by Multi-branch Hierarchical Segmentation Chaoyang Wang Shanghai Jiao Tong University wangchaoyang@sjtu.edu.cn Long Zhao Tongji University 92garyzhao@tongji.edu.cn Shuang Liang Tongji University
Object Proposal by Multi-branch Hierarchical Segmentation Chaoyang Wang Shanghai Jiao Tong University wangchaoyang@sjtu.edu.cn Long Zhao Tongji University 92garyzhao@tongji.edu.cn Shuang Liang Tongji University
[Supplementary Material] Improving Occlusion and Hard Negative Handling for Single-Stage Pedestrian Detectors
![[Supplementary Material] Improving Occlusion and Hard Negative Handling for Single-Stage Pedestrian Detectors](/thumbs/89/97941029.jpg "[Supplementary Material] Improving Occlusion and Hard Negative Handling for Single-Stage Pedestrian Detectors") [Supplementary Material] Improving Occlusion and Hard Negative Handling for Single-Stage Pedestrian Detectors Junhyug Noh Soochan Lee Beomsu Kim Gunhee Kim Department of Computer Science and Engineering
[Supplementary Material] Improving Occlusion and Hard Negative Handling for Single-Stage Pedestrian Detectors Junhyug Noh Soochan Lee Beomsu Kim Gunhee Kim Department of Computer Science and Engineering
Edge Boxes: Locating Object Proposals from Edges
 Edge Boxes: Locating Object Proposals from Edges C. Lawrence Zitnick and Piotr Dollár Microsoft Research Abstract. The use of object proposals is an effective recent approach for increasing the computational
Edge Boxes: Locating Object Proposals from Edges C. Lawrence Zitnick and Piotr Dollár Microsoft Research Abstract. The use of object proposals is an effective recent approach for increasing the computational
CS381V Experiment Presentation. Chun-Chen Kuo
 CS381V Experiment Presentation Chun-Chen Kuo The Paper Indoor Segmentation and Support Inference from RGBD Images. N. Silberman, D. Hoiem, P. Kohli, and R. Fergus. ECCV 2012. 50 100 150 200 250 300 350
CS381V Experiment Presentation Chun-Chen Kuo The Paper Indoor Segmentation and Support Inference from RGBD Images. N. Silberman, D. Hoiem, P. Kohli, and R. Fergus. ECCV 2012. 50 100 150 200 250 300 350
Object Proposal by Multi-branch Hierarchical Segmentation
 Object Proposal by Multi-branch Hierarchical Segmentation Chaoyang Wang Shanghai Jiao Tong University wangchaoyang@sjtu.edu.cn Long Zhao Tongji University 92garyzhao@tongji.edu.cn Shuang Liang Tongji University
Object Proposal by Multi-branch Hierarchical Segmentation Chaoyang Wang Shanghai Jiao Tong University wangchaoyang@sjtu.edu.cn Long Zhao Tongji University 92garyzhao@tongji.edu.cn Shuang Liang Tongji University
arxiv: v2 [cs.cv] 18 Jul 2017
![arxiv: v2 [cs.cv] 18 Jul 2017](/thumbs/72/67294650.jpg "arxiv: v2 [cs.cv] 18 Jul 2017") PHAM, ITO, KOZAKAYA: BISEG 1 arxiv:1706.02135v2 [cs.cv] 18 Jul 2017 BiSeg: Simultaneous Instance Segmentation and Semantic Segmentation with Fully Convolutional Networks Viet-Quoc Pham quocviet.pham@toshiba.co.jp
PHAM, ITO, KOZAKAYA: BISEG 1 arxiv:1706.02135v2 [cs.cv] 18 Jul 2017 BiSeg: Simultaneous Instance Segmentation and Semantic Segmentation with Fully Convolutional Networks Viet-Quoc Pham quocviet.pham@toshiba.co.jp
Complexity-Adaptive Distance Metric for Object Proposals Generation
 Complexity-Adaptive Distance Metric for Object Proposals Generation Yao Xiao Cewu Lu Efstratios Tsougenis Yongyi Lu Chi-Keung Tang The Hong Kong University of Science and Technology {yxiaoab,lucewu,tsougenis,yluaw,cktang}@cse.ust.hk
Complexity-Adaptive Distance Metric for Object Proposals Generation Yao Xiao Cewu Lu Efstratios Tsougenis Yongyi Lu Chi-Keung Tang The Hong Kong University of Science and Technology {yxiaoab,lucewu,tsougenis,yluaw,cktang}@cse.ust.hk
DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material
 DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material Yi Li 1, Gu Wang 1, Xiangyang Ji 1, Yu Xiang 2, and Dieter Fox 2 1 Tsinghua University, BNRist 2 University of Washington
DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material Yi Li 1, Gu Wang 1, Xiangyang Ji 1, Yu Xiang 2, and Dieter Fox 2 1 Tsinghua University, BNRist 2 University of Washington
Learning to Generate Object Segmentation Proposals with Multi-modal Cues
 Learning to Generate Object Segmentation Proposals with Multi-modal Cues Haoyang Zhang 1,2, Xuming He 2,1, Fatih Porikli 1,2 1 The Australian National University, 2 Data61, CSIRO, Canberra, Australia {haoyang.zhang,xuming.he,
Learning to Generate Object Segmentation Proposals with Multi-modal Cues Haoyang Zhang 1,2, Xuming He 2,1, Fatih Porikli 1,2 1 The Australian National University, 2 Data61, CSIRO, Canberra, Australia {haoyang.zhang,xuming.he,
Supplementary Material: Pixelwise Instance Segmentation with a Dynamically Instantiated Network
 Supplementary Material: Pixelwise Instance Segmentation with a Dynamically Instantiated Network Anurag Arnab and Philip H.S. Torr University of Oxford {anurag.arnab, philip.torr}@eng.ox.ac.uk 1. Introduction
Supplementary Material: Pixelwise Instance Segmentation with a Dynamically Instantiated Network Anurag Arnab and Philip H.S. Torr University of Oxford {anurag.arnab, philip.torr}@eng.ox.ac.uk 1. Introduction
Segmenting Objects in Weakly Labeled Videos
 Segmenting Objects in Weakly Labeled Videos Mrigank Rochan, Shafin Rahman, Neil D.B. Bruce, Yang Wang Department of Computer Science University of Manitoba Winnipeg, Canada {mrochan, shafin12, bruce, ywang}@cs.umanitoba.ca
Segmenting Objects in Weakly Labeled Videos Mrigank Rochan, Shafin Rahman, Neil D.B. Bruce, Yang Wang Department of Computer Science University of Manitoba Winnipeg, Canada {mrochan, shafin12, bruce, ywang}@cs.umanitoba.ca
Generating Object Candidates from RGB-D Images and Point Clouds
 Generating Object Candidates from RGB-D Images and Point Clouds Helge Wrede 11.05.2017 1 / 36 Outline Introduction Methods Overview The Data RGB-D Images Point Clouds Microsoft Kinect Generating Object
Generating Object Candidates from RGB-D Images and Point Clouds Helge Wrede 11.05.2017 1 / 36 Outline Introduction Methods Overview The Data RGB-D Images Point Clouds Microsoft Kinect Generating Object
Learning to Segment Object Candidates
 Learning to Segment Object Candidates Pedro O. Pinheiro Ronan Collobert Piotr Dollár pedro@opinheiro.com locronan@fb.com pdollar@fb.com Facebook AI Research Abstract Recent object detection systems rely
Learning to Segment Object Candidates Pedro O. Pinheiro Ronan Collobert Piotr Dollár pedro@opinheiro.com locronan@fb.com pdollar@fb.com Facebook AI Research Abstract Recent object detection systems rely
RSRN: Rich Side-output Residual Network for Medial Axis Detection
 RSRN: Rich Side-output Residual Network for Medial Axis Detection Chang Liu, Wei Ke, Jianbin Jiao, and Qixiang Ye University of Chinese Academy of Sciences, Beijing, China {liuchang615, kewei11}@mails.ucas.ac.cn,
RSRN: Rich Side-output Residual Network for Medial Axis Detection Chang Liu, Wei Ke, Jianbin Jiao, and Qixiang Ye University of Chinese Academy of Sciences, Beijing, China {liuchang615, kewei11}@mails.ucas.ac.cn,
Object Proposals for Text Extraction in the Wild
 Object Proposals for Text Extraction in the Wild Lluís Gómez and Dimosthenis Karatzas Computer Vision Center, Universitat Autònoma de Barcelona Email: {lgomez,dimos}@cvc.uab.es arxiv:59.237v [cs.cv] 8
Object Proposals for Text Extraction in the Wild Lluís Gómez and Dimosthenis Karatzas Computer Vision Center, Universitat Autònoma de Barcelona Email: {lgomez,dimos}@cvc.uab.es arxiv:59.237v [cs.cv] 8
Object Detection by 3D Aspectlets and Occlusion Reasoning
 Object Detection by 3D Aspectlets and Occlusion Reasoning Yu Xiang University of Michigan Silvio Savarese Stanford University In the 4th International IEEE Workshop on 3D Representation and Recognition
Object Detection by 3D Aspectlets and Occlusion Reasoning Yu Xiang University of Michigan Silvio Savarese Stanford University In the 4th International IEEE Workshop on 3D Representation and Recognition
arxiv: v1 [cs.cv] 5 Oct 2015
![arxiv: v1 [cs.cv] 5 Oct 2015](/thumbs/71/66021937.jpg "arxiv: v1 [cs.cv] 5 Oct 2015") Efficient Object Detection for High Resolution Images Yongxi Lu 1 and Tara Javidi 1 arxiv:1510.01257v1 [cs.cv] 5 Oct 2015 Abstract Efficient generation of high-quality object proposals is an essential
Efficient Object Detection for High Resolution Images Yongxi Lu 1 and Tara Javidi 1 arxiv:1510.01257v1 [cs.cv] 5 Oct 2015 Abstract Efficient generation of high-quality object proposals is an essential
arxiv: v1 [cs.cv] 31 Mar 2016
![arxiv: v1 [cs.cv] 31 Mar 2016](/thumbs/92/108399479.jpg "arxiv: v1 [cs.cv] 31 Mar 2016") Object Boundary Guided Semantic Segmentation Qin Huang, Chunyang Xia, Wenchao Zheng, Yuhang Song, Hao Xu and C.-C. Jay Kuo arxiv:1603.09742v1 [cs.cv] 31 Mar 2016 University of Southern California Abstract.
Object Boundary Guided Semantic Segmentation Qin Huang, Chunyang Xia, Wenchao Zheng, Yuhang Song, Hao Xu and C.-C. Jay Kuo arxiv:1603.09742v1 [cs.cv] 31 Mar 2016 University of Southern California Abstract.
Multi-instance Object Segmentation with Occlusion Handling
 Multi-instance Object Segmentation with Occlusion Handling Yi-Ting Chen 1 Xiaokai Liu 1,2 Ming-Hsuan Yang 1 University of California at Merced 1 Dalian University of Technology 2 Abstract We present a
Multi-instance Object Segmentation with Occlusion Handling Yi-Ting Chen 1 Xiaokai Liu 1,2 Ming-Hsuan Yang 1 University of California at Merced 1 Dalian University of Technology 2 Abstract We present a
Richer Convolutional Features for Edge Detection
 Richer Convolutional Features for Edge Detection Yun Liu 1 Ming-Ming Cheng 1 Xiaowei Hu 1 Kai Wang 1 Xiang Bai 2 1 Nankai University 2 HUST https://mmcheng.net/rcfedge/ Abstract In this paper, we propose
Richer Convolutional Features for Edge Detection Yun Liu 1 Ming-Ming Cheng 1 Xiaowei Hu 1 Kai Wang 1 Xiang Bai 2 1 Nankai University 2 HUST https://mmcheng.net/rcfedge/ Abstract In this paper, we propose
arxiv: v1 [cs.cv] 15 Oct 2018
![arxiv: v1 [cs.cv] 15 Oct 2018](/thumbs/89/99052786.jpg "arxiv: v1 [cs.cv] 15 Oct 2018") Instance Segmentation and Object Detection with Bounding Shape Masks Ha Young Kim 1,2,*, Ba Rom Kang 2 1 Department of Financial Engineering, Ajou University Worldcupro 206, Yeongtong-gu, Suwon, 16499,
Instance Segmentation and Object Detection with Bounding Shape Masks Ha Young Kim 1,2,*, Ba Rom Kang 2 1 Department of Financial Engineering, Ajou University Worldcupro 206, Yeongtong-gu, Suwon, 16499,
Spatial Localization and Detection. Lecture 8-1
 Lecture 8: Spatial Localization and Detection Lecture 8-1 Administrative - Project Proposals were due on Saturday Homework 2 due Friday 2/5 Homework 1 grades out this week Midterm will be in-class on Wednesday
Lecture 8: Spatial Localization and Detection Lecture 8-1 Administrative - Project Proposals were due on Saturday Homework 2 due Friday 2/5 Homework 1 grades out this week Midterm will be in-class on Wednesday
DeepEdge: A Multi-Scale Bifurcated Deep Network for Top-Down Contour Detection
 DeepEdge: A Multi-Scale Bifurcated Deep Network for Top-Down Contour Detection Gedas Bertasius University of Pennsylvania gberta@seas.upenn.edu Jianbo Shi University of Pennsylvania jshi@seas.upenn.edu
DeepEdge: A Multi-Scale Bifurcated Deep Network for Top-Down Contour Detection Gedas Bertasius University of Pennsylvania gberta@seas.upenn.edu Jianbo Shi University of Pennsylvania jshi@seas.upenn.edu
An Object Detection Algorithm based on Deformable Part Models with Bing Features Chunwei Li1, a and Youjun Bu1, b
 5th International Conference on Advanced Materials and Computer Science (ICAMCS 2016) An Object Detection Algorithm based on Deformable Part Models with Bing Features Chunwei Li1, a and Youjun Bu1, b 1
5th International Conference on Advanced Materials and Computer Science (ICAMCS 2016) An Object Detection Algorithm based on Deformable Part Models with Bing Features Chunwei Li1, a and Youjun Bu1, b 1
Fast Border Ownership Assignment with Bio-Inspired Features
 Fast Border Ownership Assignment with Bio-Inspired Features Ching L. Teo, Cornelia Fermüller, Yiannis Aloimonos Computer Vision Lab and UMIACS University of Maryland College Park What is Border Ownership?
Fast Border Ownership Assignment with Bio-Inspired Features Ching L. Teo, Cornelia Fermüller, Yiannis Aloimonos Computer Vision Lab and UMIACS University of Maryland College Park What is Border Ownership?
Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction
 Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction Marc Pollefeys Joined work with Nikolay Savinov, Christian Haene, Lubor Ladicky 2 Comparison to Volumetric Fusion Higher-order ray
Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction Marc Pollefeys Joined work with Nikolay Savinov, Christian Haene, Lubor Ladicky 2 Comparison to Volumetric Fusion Higher-order ray
PASCAL Boundaries: A Semantic Boundary Dataset with A Deep Semantic Boundary Detector
 PASCAL Boundaries: A Semantic Boundary Dataset with A Deep Semantic Boundary Detector Vittal Premachandran 1, Boyan Bonev 2, Xiaochen Lian 2, and Alan Yuille 1 1 Department of Computer Science, Johns Hopkins
PASCAL Boundaries: A Semantic Boundary Dataset with A Deep Semantic Boundary Detector Vittal Premachandran 1, Boyan Bonev 2, Xiaochen Lian 2, and Alan Yuille 1 1 Department of Computer Science, Johns Hopkins
Fine-tuning Pre-trained Large Scaled ImageNet model on smaller dataset for Detection task
 Fine-tuning Pre-trained Large Scaled ImageNet model on smaller dataset for Detection task Kyunghee Kim Stanford University 353 Serra Mall Stanford, CA 94305 kyunghee.kim@stanford.edu Abstract We use a
Fine-tuning Pre-trained Large Scaled ImageNet model on smaller dataset for Detection task Kyunghee Kim Stanford University 353 Serra Mall Stanford, CA 94305 kyunghee.kim@stanford.edu Abstract We use a
Object Proposals Using SVM-based Integrated Model
 Object Proposals Using SVM-based Integrated Model Wenjing Geng, Shuzhen Li, Tongwei Ren and Gangshan Wu State Key Laboratory for Novel Software Technology Nanjing University, Nanjing 210023, China Email:
Object Proposals Using SVM-based Integrated Model Wenjing Geng, Shuzhen Li, Tongwei Ren and Gangshan Wu State Key Laboratory for Novel Software Technology Nanjing University, Nanjing 210023, China Email:
R-FCN++: Towards Accurate Region-Based Fully Convolutional Networks for Object Detection
 The Thirty-Second AAAI Conference on Artificial Intelligence (AAAI-18) R-FCN++: Towards Accurate Region-Based Fully Convolutional Networks for Object Detection Zeming Li, 1 Yilun Chen, 2 Gang Yu, 2 Yangdong
The Thirty-Second AAAI Conference on Artificial Intelligence (AAAI-18) R-FCN++: Towards Accurate Region-Based Fully Convolutional Networks for Object Detection Zeming Li, 1 Yilun Chen, 2 Gang Yu, 2 Yangdong
arxiv: v2 [cs.cv] 23 Nov 2016 Abstract
![arxiv: v2 [cs.cv] 23 Nov 2016 Abstract](/thumbs/77/76444748.jpg "arxiv: v2 [cs.cv] 23 Nov 2016 Abstract") Simple Does It: Weakly Supervised Instance and Semantic Segmentation Anna Khoreva 1 Rodrigo Benenson 1 Jan Hosang 1 Matthias Hein 2 Bernt Schiele 1 1 Max Planck Institute for Informatics, Saarbrücken,
Simple Does It: Weakly Supervised Instance and Semantic Segmentation Anna Khoreva 1 Rodrigo Benenson 1 Jan Hosang 1 Matthias Hein 2 Bernt Schiele 1 1 Max Planck Institute for Informatics, Saarbrücken,
Discrete-Continuous Gradient Orientation Estimation for Faster Image Segmentation
 Discrete-Continuous Gradient Orientation Estimation for Faster Image Segmentation Michael Donoser and Dieter Schmalstieg Institute for Computer Graphics and Vision Graz University of Technology {donoser,schmalstieg}@icg.tugraz.at
Discrete-Continuous Gradient Orientation Estimation for Faster Image Segmentation Michael Donoser and Dieter Schmalstieg Institute for Computer Graphics and Vision Graz University of Technology {donoser,schmalstieg}@icg.tugraz.at
BoxSup: Exploiting Bounding Boxes to Supervise Convolutional Networks for Semantic Segmentation
 BoxSup: Exploiting Bounding Boxes to Supervise Convolutional Networks for Semantic Segmentation Jifeng Dai Kaiming He Jian Sun Microsoft Research {jifdai,kahe,jiansun}@microsoft.com Abstract Recent leading
BoxSup: Exploiting Bounding Boxes to Supervise Convolutional Networks for Semantic Segmentation Jifeng Dai Kaiming He Jian Sun Microsoft Research {jifdai,kahe,jiansun}@microsoft.com Abstract Recent leading
A Benchmark for Interactive Image Segmentation Algorithms
 A Benchmark for Interactive Image Segmentation Algorithms Yibiao Zhao 1,3, Xiaohan Nie 2,3, Yanbiao Duan 2,3, Yaping Huang 1, Siwei Luo 1 1 Beijing Jiaotong University, 2 Beijing Institute of Technology,
A Benchmark for Interactive Image Segmentation Algorithms Yibiao Zhao 1,3, Xiaohan Nie 2,3, Yanbiao Duan 2,3, Yaping Huang 1, Siwei Luo 1 1 Beijing Jiaotong University, 2 Beijing Institute of Technology,
Object detection using Region Proposals (RCNN) Ernest Cheung COMP Presentation
 Ernest Cheung COMP Presentation") Object detection using Region Proposals (RCNN) Ernest Cheung COMP790-125 Presentation 1 2 Problem to solve Object detection Input: Image Output: Bounding box of the object 3 Object detection using CNN
Object detection using Region Proposals (RCNN) Ernest Cheung COMP790-125 Presentation 1 2 Problem to solve Object detection Input: Image Output: Bounding box of the object 3 Object detection using CNN
TRANSPARENT OBJECT DETECTION USING REGIONS WITH CONVOLUTIONAL NEURAL NETWORK
 TRANSPARENT OBJECT DETECTION USING REGIONS WITH CONVOLUTIONAL NEURAL NETWORK 1 Po-Jen Lai ( 賴柏任 ), 2 Chiou-Shann Fuh ( 傅楸善 ) 1 Dept. of Electrical Engineering, National Taiwan University, Taiwan 2 Dept.
TRANSPARENT OBJECT DETECTION USING REGIONS WITH CONVOLUTIONAL NEURAL NETWORK 1 Po-Jen Lai ( 賴柏任 ), 2 Chiou-Shann Fuh ( 傅楸善 ) 1 Dept. of Electrical Engineering, National Taiwan University, Taiwan 2 Dept.
Edge Detection Using Convolutional Neural Network
 Edge Detection Using Convolutional Neural Network Ruohui Wang (B) Department of Information Engineering, The Chinese University of Hong Kong, Hong Kong, China wr013@ie.cuhk.edu.hk Abstract. In this work,
Edge Detection Using Convolutional Neural Network Ruohui Wang (B) Department of Information Engineering, The Chinese University of Hong Kong, Hong Kong, China wr013@ie.cuhk.edu.hk Abstract. In this work,
Segmentation as Selective Search for Object Recognition in ILSVRC2011
 Segmentation as Selective Search for Object Recognition in ILSVRC2011 Koen van de Sande Jasper Uijlings Arnold Smeulders Theo Gevers Nicu Sebe Cees Snoek University of Amsterdam, University of Trento ILSVRC2011
Segmentation as Selective Search for Object Recognition in ILSVRC2011 Koen van de Sande Jasper Uijlings Arnold Smeulders Theo Gevers Nicu Sebe Cees Snoek University of Amsterdam, University of Trento ILSVRC2011
Weakly Supervised Object Boundaries
 Weakly Supervised Object Boundaries Anna Khoreva 1 Rodrigo Benenson 1 Mohamed Omran 1 Matthias Hein 2 Bernt Schiele 1 1 Max Planck Institute for Informatics, Saarbrücken, Germany 2 Saarland University,
Weakly Supervised Object Boundaries Anna Khoreva 1 Rodrigo Benenson 1 Mohamed Omran 1 Matthias Hein 2 Bernt Schiele 1 1 Max Planck Institute for Informatics, Saarbrücken, Germany 2 Saarland University,
Multiscale Combinatorial Grouping
 Multiscale Combinatorial Grouping Pablo Arbela ez1, Jordi Pont-Tuset2, 1 Jonathan T. Barron1 University of California, Berkeley Berkeley, CA 94720 2 Ferran Marques2 Jitendra Malik1 Universitat Polite cnica
Multiscale Combinatorial Grouping Pablo Arbela ez1, Jordi Pont-Tuset2, 1 Jonathan T. Barron1 University of California, Berkeley Berkeley, CA 94720 2 Ferran Marques2 Jitendra Malik1 Universitat Polite cnica
Object-level Proposals
 Object-level Proposals Jianxiang Ma Anlong Ming Zilong Huang 2 Xinggang Wang 2 Yu Zhou, Beijing University of Posts and Telecommunications 2 Huazhong University of Science and Technology {jianxiangma,minganlong,yuzhou}@bupt.edu.cn
Object-level Proposals Jianxiang Ma Anlong Ming Zilong Huang 2 Xinggang Wang 2 Yu Zhou, Beijing University of Posts and Telecommunications 2 Huazhong University of Science and Technology {jianxiangma,minganlong,yuzhou}@bupt.edu.cn
Superpixel Segmentation using Depth
 Superpixel Segmentation using Depth Information Superpixel Segmentation using Depth Information David Stutz June 25th, 2014 David Stutz June 25th, 2014 01 Introduction - Table of Contents 1 Introduction
Superpixel Segmentation using Depth Information Superpixel Segmentation using Depth Information David Stutz June 25th, 2014 David Stutz June 25th, 2014 01 Introduction - Table of Contents 1 Introduction
arxiv: v1 [cs.cv] 1 Feb 2018
![arxiv: v1 [cs.cv] 1 Feb 2018](/thumbs/89/100586364.jpg "arxiv: v1 [cs.cv] 1 Feb 2018") Learning Semantic Segmentation with Diverse Supervision Linwei Ye University of Manitoba yel3@cs.umanitoba.ca Zhi Liu Shanghai University liuzhi@staff.shu.edu.cn Yang Wang University of Manitoba ywang@cs.umanitoba.ca
Learning Semantic Segmentation with Diverse Supervision Linwei Ye University of Manitoba yel3@cs.umanitoba.ca Zhi Liu Shanghai University liuzhi@staff.shu.edu.cn Yang Wang University of Manitoba ywang@cs.umanitoba.ca
Speaker: Ming-Ming Cheng Nankai University 15-Sep-17 Towards Weakly Supervised Image Understanding
 Towards Weakly Supervised Image Understanding (WSIU) Speaker: Ming-Ming Cheng Nankai University http://mmcheng.net/ 1/50 Understanding Visual Information Image by kirkh.deviantart.com 2/50 Dataset Annotation
Towards Weakly Supervised Image Understanding (WSIU) Speaker: Ming-Ming Cheng Nankai University http://mmcheng.net/ 1/50 Understanding Visual Information Image by kirkh.deviantart.com 2/50 Dataset Annotation
Towards Spatio-Temporally Consistent Semantic Mapping
 Towards Spatio-Temporally Consistent Semantic Mapping Zhe Zhao, Xiaoping Chen University of Science and Technology of China, zhaozhe@mail.ustc.edu.cn,xpchen@ustc.edu.cn Abstract. Intelligent robots require
Towards Spatio-Temporally Consistent Semantic Mapping Zhe Zhao, Xiaoping Chen University of Science and Technology of China, zhaozhe@mail.ustc.edu.cn,xpchen@ustc.edu.cn Abstract. Intelligent robots require
Perceptual Organization and Recognition of Indoor Scenes from RGB-D Images
 13 IEEE Conference on Computer Vision and Pattern Recognition Perceptual Organization and Recognition of Indoor Scenes from RGB-D Images Saurabh Gupta, Pablo Arbeláez, and Jitendra Malik University of
13 IEEE Conference on Computer Vision and Pattern Recognition Perceptual Organization and Recognition of Indoor Scenes from RGB-D Images Saurabh Gupta, Pablo Arbeláez, and Jitendra Malik University of
DeepProposals: Hunting Objects and Actions by Cascading Deep Convolutional Layers
 DOI.7/s263-7-6-x DeepProposals: Hunting Objects and Actions by Cascading Deep Convolutional Layers Amir Ghodrati Ali Diba 2 Marco Pedersoli 3 Tinne Tuytelaars 2 Luc Van Gool 2 Received: 3 May 26 / Accepted:
DOI.7/s263-7-6-x DeepProposals: Hunting Objects and Actions by Cascading Deep Convolutional Layers Amir Ghodrati Ali Diba 2 Marco Pedersoli 3 Tinne Tuytelaars 2 Luc Van Gool 2 Received: 3 May 26 / Accepted:
arxiv: v2 [cs.cv] 9 Apr 2017
![arxiv: v2 [cs.cv] 9 Apr 2017](/thumbs/85/92752192.jpg "arxiv: v2 [cs.cv] 9 Apr 2017") Richer Convolutional Features for Edge Detection Yun Liu 1 Ming-Ming Cheng 1 Xiaowei Hu 1 Kai Wang 1 Xiang Bai 2 1 Nankai University 2 HUST http://mmcheng.net/rcfedge/ arxiv:1612.02103v2 [cs.cv] 9 Apr
Richer Convolutional Features for Edge Detection Yun Liu 1 Ming-Ming Cheng 1 Xiaowei Hu 1 Kai Wang 1 Xiang Bai 2 1 Nankai University 2 HUST http://mmcheng.net/rcfedge/ arxiv:1612.02103v2 [cs.cv] 9 Apr
Proceedings of the International MultiConference of Engineers and Computer Scientists 2018 Vol I IMECS 2018, March 14-16, 2018, Hong Kong
 , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong TABLE I CLASSIFICATION ACCURACY OF DIFFERENT PRE-TRAINED MODELS ON THE TEST DATA
, March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong TABLE I CLASSIFICATION ACCURACY OF DIFFERENT PRE-TRAINED MODELS ON THE TEST DATA
DSD: Depth Structural Descriptor for Edge-Based Assistive Navigation
 DSD: Depth Structural Descriptor for Edge-Based Assistive Navigation David Feng, Nick Barnes, Shaodi You Data61, CSIRO; RSE, Australian National University {david.feng, nick.barnes, shaodi.you}@data61.com.au
DSD: Depth Structural Descriptor for Edge-Based Assistive Navigation David Feng, Nick Barnes, Shaodi You Data61, CSIRO; RSE, Australian National University {david.feng, nick.barnes, shaodi.you}@data61.com.au
3D Object Recognition and Scene Understanding from RGB-D Videos. Yu Xiang Postdoctoral Researcher University of Washington
 3D Object Recognition and Scene Understanding from RGB-D Videos Yu Xiang Postdoctoral Researcher University of Washington 1 2 Act in the 3D World Sensing & Understanding Acting Intelligent System 3D World
3D Object Recognition and Scene Understanding from RGB-D Videos Yu Xiang Postdoctoral Researcher University of Washington 1 2 Act in the 3D World Sensing & Understanding Acting Intelligent System 3D World
Oriented Object Proposals
 Oriented Object Proposals Shengfeng He and Rynson W.H. Lau City University of Hong Kong shengfeng he@yahoo.com, rynson.lau@cityu.edu.hk Abstract In this paper, we propose a new approach to generate oriented
Oriented Object Proposals Shengfeng He and Rynson W.H. Lau City University of Hong Kong shengfeng he@yahoo.com, rynson.lau@cityu.edu.hk Abstract In this paper, we propose a new approach to generate oriented
Perceiving the 3D World from Images and Videos. Yu Xiang Postdoctoral Researcher University of Washington
 Perceiving the 3D World from Images and Videos Yu Xiang Postdoctoral Researcher University of Washington 1 2 Act in the 3D World Sensing & Understanding Acting Intelligent System 3D World 3 Understand
Perceiving the 3D World from Images and Videos Yu Xiang Postdoctoral Researcher University of Washington 1 2 Act in the 3D World Sensing & Understanding Acting Intelligent System 3D World 3 Understand
Supplementary Materials for Salient Object Detection: A
 Supplementary Materials for Salient Object Detection: A Discriminative Regional Feature Integration Approach Huaizu Jiang, Zejian Yuan, Ming-Ming Cheng, Yihong Gong Nanning Zheng, and Jingdong Wang Abstract
Supplementary Materials for Salient Object Detection: A Discriminative Regional Feature Integration Approach Huaizu Jiang, Zejian Yuan, Ming-Ming Cheng, Yihong Gong Nanning Zheng, and Jingdong Wang Abstract
Tri-modal Human Body Segmentation
 Tri-modal Human Body Segmentation Master of Science Thesis Cristina Palmero Cantariño Advisor: Sergio Escalera Guerrero February 6, 2014 Outline 1 Introduction 2 Tri-modal dataset 3 Proposed baseline 4
Tri-modal Human Body Segmentation Master of Science Thesis Cristina Palmero Cantariño Advisor: Sergio Escalera Guerrero February 6, 2014 Outline 1 Introduction 2 Tri-modal dataset 3 Proposed baseline 4
arxiv: v1 [cs.cv] 17 May 2016
![arxiv: v1 [cs.cv] 17 May 2016](/thumbs/74/70278059.jpg "arxiv: v1 [cs.cv] 17 May 2016") SemiContour: A Semi-supervised Learning Approach for Contour Detection Zizhao Zhang, Fuyong Xing, Xiaoshuang Shi, Lin Yang University of Florida, Gainesville, FL 32611, USA zizhao@cise.ufl.edu, {f.xing,xsshi2015}@ufl.edu,
SemiContour: A Semi-supervised Learning Approach for Contour Detection Zizhao Zhang, Fuyong Xing, Xiaoshuang Shi, Lin Yang University of Florida, Gainesville, FL 32611, USA zizhao@cise.ufl.edu, {f.xing,xsshi2015}@ufl.edu,
Gated Bi-directional CNN for Object Detection
 Gated Bi-directional CNN for Object Detection Xingyu Zeng,, Wanli Ouyang, Bin Yang, Junjie Yan, Xiaogang Wang The Chinese University of Hong Kong, Sensetime Group Limited {xyzeng,wlouyang}@ee.cuhk.edu.hk,
Gated Bi-directional CNN for Object Detection Xingyu Zeng,, Wanli Ouyang, Bin Yang, Junjie Yan, Xiaogang Wang The Chinese University of Hong Kong, Sensetime Group Limited {xyzeng,wlouyang}@ee.cuhk.edu.hk,
Combining ROI-base and Superpixel Segmentation for Pedestrian Detection Ji Ma1,2, a, Jingjiao Li1, Zhenni Li1 and Li Ma2
 6th International Conference on Machinery, Materials, Environment, Biotechnology and Computer (MMEBC 2016) Combining ROI-base and Superpixel Segmentation for Pedestrian Detection Ji Ma1,2, a, Jingjiao
6th International Conference on Machinery, Materials, Environment, Biotechnology and Computer (MMEBC 2016) Combining ROI-base and Superpixel Segmentation for Pedestrian Detection Ji Ma1,2, a, Jingjiao
Improving Small Object Detection
 Improving Small Object Detection Harish Krishna, C.V. Jawahar CVIT, KCIS International Institute of Information Technology Hyderabad, India Abstract While the problem of detecting generic objects in natural
Improving Small Object Detection Harish Krishna, C.V. Jawahar CVIT, KCIS International Institute of Information Technology Hyderabad, India Abstract While the problem of detecting generic objects in natural
Supervised texture detection in images
 Supervised texture detection in images Branislav Mičušík and Allan Hanbury Pattern Recognition and Image Processing Group, Institute of Computer Aided Automation, Vienna University of Technology Favoritenstraße
Supervised texture detection in images Branislav Mičušík and Allan Hanbury Pattern Recognition and Image Processing Group, Institute of Computer Aided Automation, Vienna University of Technology Favoritenstraße
Iteratively Trained Interactive Segmentation
 MAHADEVAN ET AL.: ITERATIVELY TRAINED INTERACTIVE SEGMENTATION 1 Iteratively Trained Interactive Segmentation Sabarinath Mahadevan mahadevan@vision.rwth-aachen.de Paul Voigtlaender voigtlaender@vision.rwth-aachen.de
MAHADEVAN ET AL.: ITERATIVELY TRAINED INTERACTIVE SEGMENTATION 1 Iteratively Trained Interactive Segmentation Sabarinath Mahadevan mahadevan@vision.rwth-aachen.de Paul Voigtlaender voigtlaender@vision.rwth-aachen.de
Cascaded Sparse Spatial Bins for Efficient and Effective Generic Object Detection
 Cascaded Sparse Spatial Bins for Efficient and Effective Generic Object Detection David Novotny,2 Visual Geometry Group University of Oxford david@robots.ox.ac.uk Jiri Matas 2 2 Center for Machine Perception
Cascaded Sparse Spatial Bins for Efficient and Effective Generic Object Detection David Novotny,2 Visual Geometry Group University of Oxford david@robots.ox.ac.uk Jiri Matas 2 2 Center for Machine Perception
Grouping and Segmentation
 03/17/15 Grouping and Segmentation Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Today s class Segmentation and grouping Gestalt cues By clustering (mean-shift) By boundaries (watershed)
03/17/15 Grouping and Segmentation Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Today s class Segmentation and grouping Gestalt cues By clustering (mean-shift) By boundaries (watershed)
Supplementary Material for Zoom and Learn: Generalizing Deep Stereo Matching to Novel Domains
 Supplementary Material for Zoom and Learn: Generalizing Deep Stereo Matching to Novel Domains Jiahao Pang 1 Wenxiu Sun 1 Chengxi Yang 1 Jimmy Ren 1 Ruichao Xiao 1 Jin Zeng 1 Liang Lin 1,2 1 SenseTime Research
Supplementary Material for Zoom and Learn: Generalizing Deep Stereo Matching to Novel Domains Jiahao Pang 1 Wenxiu Sun 1 Chengxi Yang 1 Jimmy Ren 1 Ruichao Xiao 1 Jin Zeng 1 Liang Lin 1,2 1 SenseTime Research
Separating Objects and Clutter in Indoor Scenes
 Separating Objects and Clutter in Indoor Scenes Salman H. Khan School of Computer Science & Software Engineering, The University of Western Australia Co-authors: Xuming He, Mohammed Bennamoun, Ferdous
Separating Objects and Clutter in Indoor Scenes Salman H. Khan School of Computer Science & Software Engineering, The University of Western Australia Co-authors: Xuming He, Mohammed Bennamoun, Ferdous
Using RGB, Depth, and Thermal Data for Improved Hand Detection
 Using RGB, Depth, and Thermal Data for Improved Hand Detection Rachel Luo, Gregory Luppescu Department of Electrical Engineering Stanford University {rsluo, gluppes}@stanford.edu Abstract Hand detection
Using RGB, Depth, and Thermal Data for Improved Hand Detection Rachel Luo, Gregory Luppescu Department of Electrical Engineering Stanford University {rsluo, gluppes}@stanford.edu Abstract Hand detection
CS 1674: Intro to Computer Vision. Object Recognition. Prof. Adriana Kovashka University of Pittsburgh April 3, 5, 2018
 CS 1674: Intro to Computer Vision Object Recognition Prof. Adriana Kovashka University of Pittsburgh April 3, 5, 2018 Different Flavors of Object Recognition Semantic Segmentation Classification + Localization
CS 1674: Intro to Computer Vision Object Recognition Prof. Adriana Kovashka University of Pittsburgh April 3, 5, 2018 Different Flavors of Object Recognition Semantic Segmentation Classification + Localization
arxiv: v1 [cs.cv] 3 Apr 2016
![arxiv: v1 [cs.cv] 3 Apr 2016](/thumbs/77/76512524.jpg "arxiv: v1 [cs.cv] 3 Apr 2016") : Towards Accurate Region Proposal Generation and Joint Object Detection arxiv:64.6v [cs.cv] 3 Apr 26 Tao Kong Anbang Yao 2 Yurong Chen 2 Fuchun Sun State Key Lab. of Intelligent Technology and Systems
: Towards Accurate Region Proposal Generation and Joint Object Detection arxiv:64.6v [cs.cv] 3 Apr 26 Tao Kong Anbang Yao 2 Yurong Chen 2 Fuchun Sun State Key Lab. of Intelligent Technology and Systems
Pseudo Mask Augmented Object Detection
 Pseudo Mask Augmented Object Detection Xiangyun Zhao Northwestern University zhaoxiangyun915@gmail.com Shuang Liang Tongji University shuangliang@tongji.edu.cn Yichen Wei Microsoft Research yichenw@microsoft.com
Pseudo Mask Augmented Object Detection Xiangyun Zhao Northwestern University zhaoxiangyun915@gmail.com Shuang Liang Tongji University shuangliang@tongji.edu.cn Yichen Wei Microsoft Research yichenw@microsoft.com
Final Report: Smart Trash Net: Waste Localization and Classification
 Final Report: Smart Trash Net: Waste Localization and Classification Oluwasanya Awe oawe@stanford.edu Robel Mengistu robel@stanford.edu December 15, 2017 Vikram Sreedhar vsreed@stanford.edu Abstract Given
Final Report: Smart Trash Net: Waste Localization and Classification Oluwasanya Awe oawe@stanford.edu Robel Mengistu robel@stanford.edu December 15, 2017 Vikram Sreedhar vsreed@stanford.edu Abstract Given
Medial Features for Superpixel Segmentation
 Medial Features for Superpixel Segmentation David Engel Luciano Spinello Rudolph Triebel Roland Siegwart Heinrich H. Bülthoff Cristóbal Curio Max Planck Institute for Biological Cybernetics Spemannstr.
Medial Features for Superpixel Segmentation David Engel Luciano Spinello Rudolph Triebel Roland Siegwart Heinrich H. Bülthoff Cristóbal Curio Max Planck Institute for Biological Cybernetics Spemannstr.
Learning Fully Dense Neural Networks for Image Semantic Segmentation
 Learning Fully Dense Neural Networks for Image Semantic Segmentation Mingmin Zhen 1, Jinglu Wang 2, Lei Zhou 1, Tian Fang 3, Long Quan 1 1 Hong Kong University of Science and Technology, 2 Microsoft Research
Learning Fully Dense Neural Networks for Image Semantic Segmentation Mingmin Zhen 1, Jinglu Wang 2, Lei Zhou 1, Tian Fang 3, Long Quan 1 1 Hong Kong University of Science and Technology, 2 Microsoft Research
arxiv: v1 [cs.cv] 7 Jul 2014
![arxiv: v1 [cs.cv] 7 Jul 2014](/thumbs/76/73422133.jpg "arxiv: v1 [cs.cv] 7 Jul 2014") arxiv:1407.1808v1 [cs.cv] 7 Jul 2014 Simultaneous Detection and Segmentation Bharath Hariharan 1, Pablo Arbeláez 1,2, Ross Girshick 1, and Jitendra Malik 1 {bharath2,arbelaez,rbg,malik}@eecs.berkeley.edu
arxiv:1407.1808v1 [cs.cv] 7 Jul 2014 Simultaneous Detection and Segmentation Bharath Hariharan 1, Pablo Arbeláez 1,2, Ross Girshick 1, and Jitendra Malik 1 {bharath2,arbelaez,rbg,malik}@eecs.berkeley.edu
Unified, real-time object detection
 Unified, real-time object detection Final Project Report, Group 02, 8 Nov 2016 Akshat Agarwal (13068), Siddharth Tanwar (13699) CS698N: Recent Advances in Computer Vision, Jul Nov 2016 Instructor: Gaurav
Unified, real-time object detection Final Project Report, Group 02, 8 Nov 2016 Akshat Agarwal (13068), Siddharth Tanwar (13699) CS698N: Recent Advances in Computer Vision, Jul Nov 2016 Instructor: Gaurav
Deep Crisp Boundaries
 Deep Crisp Boundaries Yupei Wang 1,2, Xin Zhao 1,2, Kaiqi Huang 1,2,3 1 CRIPAC & NLPR, CASIA 2 University of Chinese Academy of Sciences 3 CAS Center for Excellence in Brain Science and Intelligence Technology
Deep Crisp Boundaries Yupei Wang 1,2, Xin Zhao 1,2, Kaiqi Huang 1,2,3 1 CRIPAC & NLPR, CASIA 2 University of Chinese Academy of Sciences 3 CAS Center for Excellence in Brain Science and Intelligence Technology
Segmentation Computer Vision Spring 2018, Lecture 27
 Segmentation http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 218, Lecture 27 Course announcements Homework 7 is due on Sunday 6 th. - Any questions about homework 7? - How many of you have
Segmentation http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 218, Lecture 27 Course announcements Homework 7 is due on Sunday 6 th. - Any questions about homework 7? - How many of you have
Estimating Human Pose in Images. Navraj Singh December 11, 2009
 Estimating Human Pose in Images Navraj Singh December 11, 2009 Introduction This project attempts to improve the performance of an existing method of estimating the pose of humans in still images. Tasks
Estimating Human Pose in Images Navraj Singh December 11, 2009 Introduction This project attempts to improve the performance of an existing method of estimating the pose of humans in still images. Tasks
What Happened to the Representations of Perception? Cornelia Fermüller Computer Vision Laboratory University of Maryland
 What Happened to the Representations of Perception? Cornelia Fermüller Computer Vision Laboratory University of Maryland Why we study manipulation actions? 2. Learning from humans to teach robots Y Yang,
What Happened to the Representations of Perception? Cornelia Fermüller Computer Vision Laboratory University of Maryland Why we study manipulation actions? 2. Learning from humans to teach robots Y Yang,
Lecture 7: Semantic Segmentation
 Semantic Segmentation CSED703R: Deep Learning for Visual Recognition (207F) Segmenting images based on its semantic notion Lecture 7: Semantic Segmentation Bohyung Han Computer Vision Lab. bhhanpostech.ac.kr
Semantic Segmentation CSED703R: Deep Learning for Visual Recognition (207F) Segmenting images based on its semantic notion Lecture 7: Semantic Segmentation Bohyung Han Computer Vision Lab. bhhanpostech.ac.kr
Learning From Weakly Supervised Data by The Expectation Loss SVM (e-svm) algorithm
 algorithm") Learning From Weakly Supervised Data by The Expectation Loss SVM (e-svm) algorithm Jun Zhu Department of Statistics University of California, Los Angeles jzh@ucla.edu Junhua Mao Department of Statistics
Learning From Weakly Supervised Data by The Expectation Loss SVM (e-svm) algorithm Jun Zhu Department of Statistics University of California, Los Angeles jzh@ucla.edu Junhua Mao Department of Statistics
ECCV Presented by: Boris Ivanovic and Yolanda Wang CS 331B - November 16, 2016
 ECCV 2016 Presented by: Boris Ivanovic and Yolanda Wang CS 331B - November 16, 2016 Fundamental Question What is a good vector representation of an object? Something that can be easily predicted from 2D
ECCV 2016 Presented by: Boris Ivanovic and Yolanda Wang CS 331B - November 16, 2016 Fundamental Question What is a good vector representation of an object? Something that can be easily predicted from 2D
Object Detection with Partial Occlusion Based on a Deformable Parts-Based Model
 Object Detection with Partial Occlusion Based on a Deformable Parts-Based Model Johnson Hsieh (johnsonhsieh@gmail.com), Alexander Chia (alexchia@stanford.edu) Abstract -- Object occlusion presents a major
Object Detection with Partial Occlusion Based on a Deformable Parts-Based Model Johnson Hsieh (johnsonhsieh@gmail.com), Alexander Chia (alexchia@stanford.edu) Abstract -- Object occlusion presents a major
Conditional Random Fields as Recurrent Neural Networks
 BIL722 - Deep Learning for Computer Vision Conditional Random Fields as Recurrent Neural Networks S. Zheng, S. Jayasumana, B. Romera-Paredes V. Vineet, Z. Su, D. Du, C. Huang, P.H.S. Torr Introduction
BIL722 - Deep Learning for Computer Vision Conditional Random Fields as Recurrent Neural Networks S. Zheng, S. Jayasumana, B. Romera-Paredes V. Vineet, Z. Su, D. Du, C. Huang, P.H.S. Torr Introduction
arxiv: v1 [cs.cv] 26 Jun 2017
![arxiv: v1 [cs.cv] 26 Jun 2017](/thumbs/80/82184026.jpg "arxiv: v1 [cs.cv] 26 Jun 2017") Detecting Small Signs from Large Images arxiv:1706.08574v1 [cs.cv] 26 Jun 2017 Zibo Meng, Xiaochuan Fan, Xin Chen, Min Chen and Yan Tong Computer Science and Engineering University of South Carolina, Columbia,
Detecting Small Signs from Large Images arxiv:1706.08574v1 [cs.cv] 26 Jun 2017 Zibo Meng, Xiaochuan Fan, Xin Chen, Min Chen and Yan Tong Computer Science and Engineering University of South Carolina, Columbia,