Overview. Related Work Tensor Voting in 2-D Tensor Voting in 3-D Tensor Voting in N-D Application to Vision Problems Stereo Visual Motion
|
|
|
- Marianna Wilcox
- 5 years ago
- Views:
Transcription
1 Overview Related Work Tensor Voting in 2-D Tensor Voting in 3-D Tensor Voting in N-D Application to Vision Problems Stereo Visual Motion Binary-Space-Partitioned Images 3-D Surface Extraction from Medical Data Epipolar Geometry Estimation for Non-static Scenes Image Repairing Range and 3-D Data Repairing Video Repairing Luminance Correction Conclusions
2 Motivation Luminance inconsistency when registering images or frames Several factors Exposure variance White balance Gamma correction Vignetting Digitizer parameters
3 Related Work Mosaic registration with exposure correction in the overlapping area Block blending Feather-based blending Purpose: constructing natural transition Radiometric calibration Construction high range image from several static images
4 Our approach Warp function estimation Replacement function estimation The function directly measures the color difference between images Modeless method
5 Our approach Global replace globally map colors between images Local replace estimate vignetting effect for each image Final replacement global(local(.))

6 Luminance Voting Voting space construction Joint image Tensor encoding 2D ball tensor for each sample Luminance voting Exclusive voting Global Replace
7 Monotonic Constraint Monotonic constraint: Let (I,I) be the continuous joint image space. If I (x 1, y 1 ) > I (x 2, y 2 ), then I(x 1, y 1 ) > I(x 2, y 2 ) if (x 1, y 1 ) (x 2, y 2 ) and (x 1, y 1 ) (x 2, y 2 ) are corresponding pixel pairs in overlapping area Local fitting

8 Multiscale Inferring the most-likely curve from noise Gaussian pyramid is constructed

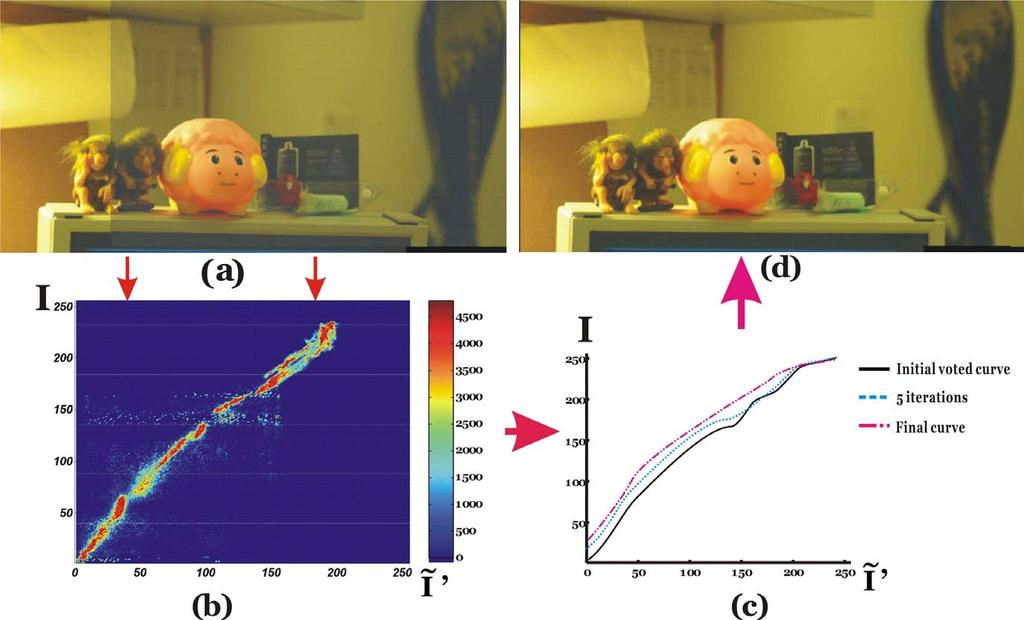
9 Local Replacement Same process to estimate local replacement curve Vignetting is distance based optic phenomenon Only difference on voting space Vignetting level l Distance r i







10 Local Replacement Results (a) (b) (c) (d)
11 Results

12 Results
13 Conclusion 2-D tensor voting method to connect curves Adaptive scale selection Geometric hole filling Layered background extraction and propagation Homography blending Luminance voting Global and local replacement function
14 Future work Movement registration Mosaics with moving objects Other image-based applications Generalized video repairing Broader class of camera motions Complex foreground
15 Overview Related Work Tensor Voting in 2-D Tensor Voting in 3-D Tensor Voting in N-D Application to Vision Problems Stereo Visual Motion Binary-Space-Partitioned Images 3-D Surface Extraction from Medical Data Epipolar Geometry Estimation for Non-static Scenes Image Repairing Range and 3-D Data Repairing Video Repairing Luminance Correction Conclusions
16 Contributions General, expandable computational framework Unified and rich representation for all potential types of structure and outliers No hard decisions at early stages Model-free Very little initialization requirements
17 Contributions Efficient local information propagation through Tensor Voting Non-iterative Robust to noise Good results in large range of problems in Computer Vision and other fields
18 Future Work: Multiple Scales Scale affects Desired level of smoothness Noise robustness Detail Preservation Ability to fill in gaps A single scale may be insufficient in most cases Work has been done on multiple scale Tensor Voting but more is needed
19 Future Work Scale adaptation based on local criteria / automatic scale selection Integration of time into the framework Improvements in computational efficiency
20 Bibliography Book: G. Medioni, M.S. Lee, and C.K Tang, A Computational Framework for Feature Extraction and Segmentation, Elsevier, 2000 Journal Articles G. Guy and G. Medioni, Inferring Global Perceptual Contours from Local Features, IJCV, vol 20, no. 1/2, pp , G. Guy and G. Medioni, Inference of Surfaces, 3D Curves, and Junctions from Sparse, Noisy, 3-D Data, IEEE Trans. on PAMI, vol. 19, no.11, pp , 1997
21 Bibliography M.S. Lee and G. Medioni, Grouping., -, ->, O-, into Regions, Curves, and Junctions, CVIU, vol. 76, no. 1, pp , M.S. Lee, G. Medioni, and P. Mordohai, Inference of Segmented Overlapping Surfaces from Binocular Stereo, IEEE Trans. on PAMI, vol. 24, no. 6, pp , 2002 M. Nicolescu and G. Medioni, "Layered 4-D Representation and Voting for Grouping from Motion", IEEE Trans. on PAMI, vol. 25, no. 4, pages , 2003
22 Bibliography C.K. Tang and G. Medioni, Inference of Integrated Surface, Curve, and Junction Descriptions from Sparse 3-D Data", IEEE Trans. on PAMI, vol. 20, no. 11, pp , 1998 C.K. Tang, G. Medioni, and M.S. Lee, N-Dimensional Tensor Voting, and Application to Epipolar Geometry Estimation," IEEE Trans. on PAMI, vol. 23, no.8, pp , 2001 C.K. Tang, G. Medioni, Curvature-Augmented Tensorial Framework for Integrated Shape Inference from Noisy, 3-D Data, IEEE Trans. on PAMI, vol. 24, no. 6, pp , 2002
Continuous Multi-View Tracking using Tensor Voting
 Continuous Multi-View Tracking using Tensor Voting Jinman Kang, Isaac Cohen and Gerard Medioni Institute for Robotics and Intelligent Systems University of Southern California {jinmanka, icohen, medioni}@iris.usc.edu
Continuous Multi-View Tracking using Tensor Voting Jinman Kang, Isaac Cohen and Gerard Medioni Institute for Robotics and Intelligent Systems University of Southern California {jinmanka, icohen, medioni}@iris.usc.edu
What is Computer Vision?
 Perceptual Grouping in Computer Vision Gérard Medioni University of Southern California What is Computer Vision? Computer Vision Attempt to emulate Human Visual System Perceive visual stimuli with cameras
Perceptual Grouping in Computer Vision Gérard Medioni University of Southern California What is Computer Vision? Computer Vision Attempt to emulate Human Visual System Perceive visual stimuli with cameras
Perceptual Grouping from Motion Cues Using Tensor Voting
 Perceptual Grouping from Motion Cues Using Tensor Voting 1. Research Team Project Leader: Graduate Students: Prof. Gérard Medioni, Computer Science Mircea Nicolescu, Changki Min 2. Statement of Project
Perceptual Grouping from Motion Cues Using Tensor Voting 1. Research Team Project Leader: Graduate Students: Prof. Gérard Medioni, Computer Science Mircea Nicolescu, Changki Min 2. Statement of Project
Continuous Multi-Views Tracking using Tensor Voting
 Continuous Multi-Views racking using ensor Voting Jinman Kang, Isaac Cohen and Gerard Medioni Institute for Robotics and Intelligent Systems University of Southern California Los Angeles, CA 90089-073.
Continuous Multi-Views racking using ensor Voting Jinman Kang, Isaac Cohen and Gerard Medioni Institute for Robotics and Intelligent Systems University of Southern California Los Angeles, CA 90089-073.
Motion Tracking and Event Understanding in Video Sequences
 Motion Tracking and Event Understanding in Video Sequences Isaac Cohen Elaine Kang, Jinman Kang Institute for Robotics and Intelligent Systems University of Southern California Los Angeles, CA Objectives!
Motion Tracking and Event Understanding in Video Sequences Isaac Cohen Elaine Kang, Jinman Kang Institute for Robotics and Intelligent Systems University of Southern California Los Angeles, CA Objectives!
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Motion Segmentation with Accurate Boundaries - A Tensor Voting Approach
 Motion Segmentation with Accurate Boundaries - A Tensor Voting Approach Mircea Nicolescu and Gérard Medioni Integrated Media Systems Center University of Southern California Los Angeles, CA 90089-0273
Motion Segmentation with Accurate Boundaries - A Tensor Voting Approach Mircea Nicolescu and Gérard Medioni Integrated Media Systems Center University of Southern California Los Angeles, CA 90089-0273
3D Computer Vision. Structured Light II. Prof. Didier Stricker. Kaiserlautern University.
 3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
Perceptual Grouping for Multiple View Stereo using Tensor Voting
 Perceptual Grouping for Multiple View Stereo using ensor Voting Philippos Mordohai and Gérard Medioni Integrated Media Systems Center University of Southern California {mordohai, medioni}@iris.usc.edu
Perceptual Grouping for Multiple View Stereo using ensor Voting Philippos Mordohai and Gérard Medioni Integrated Media Systems Center University of Southern California {mordohai, medioni}@iris.usc.edu
Inferring Segmented Surface Description from Stereo Data *
 Inferring Segmented Surface Description from Stereo Data * Mi-Suen Lee and Gérard Medioni University of Southern California Los Angles, CA 90089-0273 Abstract We present an integrated approach to the derivation
Inferring Segmented Surface Description from Stereo Data * Mi-Suen Lee and Gérard Medioni University of Southern California Los Angles, CA 90089-0273 Abstract We present an integrated approach to the derivation
TENSOR VOTING IN COMPUTER VISION, VISUALIZATION, AND HIGHER DIMENSIONAL INFERENCES. Chi-Keung Tang
 TENSOR VOTING IN COMPUTER VISION, VISUALIZATION, AND HIGHER DIMENSIONAL INFERENCES by Chi-Keung Tang A Dissertation Presented to the FACULTY OF THE GRADUATE SCHOOL UNIVERSITY OF SOUTHERN CALIFORNIA In
TENSOR VOTING IN COMPUTER VISION, VISUALIZATION, AND HIGHER DIMENSIONAL INFERENCES by Chi-Keung Tang A Dissertation Presented to the FACULTY OF THE GRADUATE SCHOOL UNIVERSITY OF SOUTHERN CALIFORNIA In
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
Feature Transfer and Matching in Disparate Stereo Views through the use of Plane Homographies
 Feature Transfer and Matching in Disparate Stereo Views through the use of Plane Homographies M. Lourakis, S. Tzurbakis, A. Argyros, S. Orphanoudakis Computer Vision and Robotics Lab (CVRL) Institute of
Feature Transfer and Matching in Disparate Stereo Views through the use of Plane Homographies M. Lourakis, S. Tzurbakis, A. Argyros, S. Orphanoudakis Computer Vision and Robotics Lab (CVRL) Institute of
Motion and Target Tracking (Overview) Suya You. Integrated Media Systems Center Computer Science Department University of Southern California
 Suya You. Integrated Media Systems Center Computer Science Department University of Southern California") Motion and Target Tracking (Overview) Suya You Integrated Media Systems Center Computer Science Department University of Southern California 1 Applications - Video Surveillance Commercial - Personals/Publics
Motion and Target Tracking (Overview) Suya You Integrated Media Systems Center Computer Science Department University of Southern California 1 Applications - Video Surveillance Commercial - Personals/Publics
3D Modeling using multiple images Exam January 2008
 3D Modeling using multiple images Exam January 2008 All documents are allowed. Answers should be justified. The different sections below are independant. 1 3D Reconstruction A Robust Approche Consider
3D Modeling using multiple images Exam January 2008 All documents are allowed. Answers should be justified. The different sections below are independant. 1 3D Reconstruction A Robust Approche Consider
Structured light 3D reconstruction
 Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Capture and Displays CS 211A
 Capture and Displays CS 211A HDR Image Bilateral Filter Color Gamut Natural Colors Camera Gamut Traditional Displays LCD panels The gamut is the result of the filters used In projectors Recent high gamut
Capture and Displays CS 211A HDR Image Bilateral Filter Color Gamut Natural Colors Camera Gamut Traditional Displays LCD panels The gamut is the result of the filters used In projectors Recent high gamut
COMPARATIVE STUDY OF DIFFERENT APPROACHES FOR EFFICIENT RECTIFICATION UNDER GENERAL MOTION
 COMPARATIVE STUDY OF DIFFERENT APPROACHES FOR EFFICIENT RECTIFICATION UNDER GENERAL MOTION Mr.V.SRINIVASA RAO 1 Prof.A.SATYA KALYAN 2 DEPARTMENT OF COMPUTER SCIENCE AND ENGINEERING PRASAD V POTLURI SIDDHARTHA
COMPARATIVE STUDY OF DIFFERENT APPROACHES FOR EFFICIENT RECTIFICATION UNDER GENERAL MOTION Mr.V.SRINIVASA RAO 1 Prof.A.SATYA KALYAN 2 DEPARTMENT OF COMPUTER SCIENCE AND ENGINEERING PRASAD V POTLURI SIDDHARTHA
Image processing and features
 Image processing and features Gabriele Bleser gabriele.bleser@dfki.de Thanks to Harald Wuest, Folker Wientapper and Marc Pollefeys Introduction Previous lectures: geometry Pose estimation Epipolar geometry
Image processing and features Gabriele Bleser gabriele.bleser@dfki.de Thanks to Harald Wuest, Folker Wientapper and Marc Pollefeys Introduction Previous lectures: geometry Pose estimation Epipolar geometry
Direct Methods in Visual Odometry
 Direct Methods in Visual Odometry July 24, 2017 Direct Methods in Visual Odometry July 24, 2017 1 / 47 Motivation for using Visual Odometry Wheel odometry is affected by wheel slip More accurate compared
Direct Methods in Visual Odometry July 24, 2017 Direct Methods in Visual Odometry July 24, 2017 1 / 47 Motivation for using Visual Odometry Wheel odometry is affected by wheel slip More accurate compared
Accurate 3D Face and Body Modeling from a Single Fixed Kinect
 Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Robotics Programming Laboratory
 Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
A virtual tour of free viewpoint rendering
 A virtual tour of free viewpoint rendering Cédric Verleysen ICTEAM institute, Université catholique de Louvain, Belgium cedric.verleysen@uclouvain.be Organization of the presentation Context Acquisition
A virtual tour of free viewpoint rendering Cédric Verleysen ICTEAM institute, Université catholique de Louvain, Belgium cedric.verleysen@uclouvain.be Organization of the presentation Context Acquisition
Topics to be Covered in the Rest of the Semester. CSci 4968 and 6270 Computational Vision Lecture 15 Overview of Remainder of the Semester
 Topics to be Covered in the Rest of the Semester CSci 4968 and 6270 Computational Vision Lecture 15 Overview of Remainder of the Semester Charles Stewart Department of Computer Science Rensselaer Polytechnic
Topics to be Covered in the Rest of the Semester CSci 4968 and 6270 Computational Vision Lecture 15 Overview of Remainder of the Semester Charles Stewart Department of Computer Science Rensselaer Polytechnic
CS664 Lecture #19: Layers, RANSAC, panoramas, epipolar geometry
 CS664 Lecture #19: Layers, RANSAC, panoramas, epipolar geometry Some material taken from: David Lowe, UBC Jiri Matas, CMP Prague http://cmp.felk.cvut.cz/~matas/papers/presentations/matas_beyondransac_cvprac05.ppt
CS664 Lecture #19: Layers, RANSAC, panoramas, epipolar geometry Some material taken from: David Lowe, UBC Jiri Matas, CMP Prague http://cmp.felk.cvut.cz/~matas/papers/presentations/matas_beyondransac_cvprac05.ppt
Object Recognition with Invariant Features
 Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
Multiple View Geometry in Computer Vision Second Edition
 Multiple View Geometry in Computer Vision Second Edition Richard Hartley Australian National University, Canberra, Australia Andrew Zisserman University of Oxford, UK CAMBRIDGE UNIVERSITY PRESS Contents
Multiple View Geometry in Computer Vision Second Edition Richard Hartley Australian National University, Canberra, Australia Andrew Zisserman University of Oxford, UK CAMBRIDGE UNIVERSITY PRESS Contents
Step-by-Step Model Buidling
 Step-by-Step Model Buidling Review Feature selection Feature selection Feature correspondence Camera Calibration Euclidean Reconstruction Landing Augmented Reality Vision Based Control Sparse Structure
Step-by-Step Model Buidling Review Feature selection Feature selection Feature correspondence Camera Calibration Euclidean Reconstruction Landing Augmented Reality Vision Based Control Sparse Structure
3D Human Motion Analysis and Manifolds
 D E P A R T M E N T O F C O M P U T E R S C I E N C E U N I V E R S I T Y O F C O P E N H A G E N 3D Human Motion Analysis and Manifolds Kim Steenstrup Pedersen DIKU Image group and E-Science center Motivation
D E P A R T M E N T O F C O M P U T E R S C I E N C E U N I V E R S I T Y O F C O P E N H A G E N 3D Human Motion Analysis and Manifolds Kim Steenstrup Pedersen DIKU Image group and E-Science center Motivation
Panoramic Image Stitching
 Mcgill University Panoramic Image Stitching by Kai Wang Pengbo Li A report submitted in fulfillment for the COMP 558 Final project in the Faculty of Computer Science April 2013 Mcgill University Abstract
Mcgill University Panoramic Image Stitching by Kai Wang Pengbo Li A report submitted in fulfillment for the COMP 558 Final project in the Faculty of Computer Science April 2013 Mcgill University Abstract
Silhouette Coherence for Camera Calibration under Circular Motion
 Silhouette Coherence for Camera Calibration under Circular Motion Carlos Hernández, Francis Schmitt and Roberto Cipolla Appendix I 2 I. ERROR ANALYSIS OF THE SILHOUETTE COHERENCE AS A FUNCTION OF SILHOUETTE
Silhouette Coherence for Camera Calibration under Circular Motion Carlos Hernández, Francis Schmitt and Roberto Cipolla Appendix I 2 I. ERROR ANALYSIS OF THE SILHOUETTE COHERENCE AS A FUNCTION OF SILHOUETTE
Tensor Voting: A Perceptual Organization Approach to Computer Vision and Machine Learning
 Tensor Voting: A Perceptual Organization Approach to Computer Vision and Machine Learning Philippos Mordohai University of North Carolina, Chapel Hill http://cs.unc.edu/~mordohai 1 Short Biography Ph.D.
Tensor Voting: A Perceptual Organization Approach to Computer Vision and Machine Learning Philippos Mordohai University of North Carolina, Chapel Hill http://cs.unc.edu/~mordohai 1 Short Biography Ph.D.
Two-Frames Accurate Motion Segmentation Using Tensor Voting and Graph-Cuts
 Two-Frames Accurate Motion Segmentation Using Tensor Voting and Graph-Cuts Thang Dinh * and Gérard Medioni Institute for Robotics and Intelligent Systems University of Southern California Los Angeles,
Two-Frames Accurate Motion Segmentation Using Tensor Voting and Graph-Cuts Thang Dinh * and Gérard Medioni Institute for Robotics and Intelligent Systems University of Southern California Los Angeles,
Announcements. Mosaics. How to do it? Image Mosaics
 Announcements Mosaics Project artifact voting Project 2 out today (help session at end of class) http://www.destination36.com/start.htm http://www.vrseattle.com/html/vrview.php?cat_id=&vrs_id=vrs38 Today
Announcements Mosaics Project artifact voting Project 2 out today (help session at end of class) http://www.destination36.com/start.htm http://www.vrseattle.com/html/vrview.php?cat_id=&vrs_id=vrs38 Today
Multi-stable Perception. Necker Cube
 Multi-stable Perception Necker Cube Spinning dancer illusion, Nobuyuki Kayahara Multiple view geometry Stereo vision Epipolar geometry Lowe Hartley and Zisserman Depth map extraction Essential matrix
Multi-stable Perception Necker Cube Spinning dancer illusion, Nobuyuki Kayahara Multiple view geometry Stereo vision Epipolar geometry Lowe Hartley and Zisserman Depth map extraction Essential matrix
The Lucas & Kanade Algorithm
 The Lucas & Kanade Algorithm Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Registration, Registration, Registration. Linearizing Registration. Lucas & Kanade Algorithm. 3 Biggest
The Lucas & Kanade Algorithm Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Registration, Registration, Registration. Linearizing Registration. Lucas & Kanade Algorithm. 3 Biggest
Image Transfer Methods. Satya Prakash Mallick Jan 28 th, 2003
 Image Transfer Methods Satya Prakash Mallick Jan 28 th, 2003 Objective Given two or more images of the same scene, the objective is to synthesize a novel view of the scene from a view point where there
Image Transfer Methods Satya Prakash Mallick Jan 28 th, 2003 Objective Given two or more images of the same scene, the objective is to synthesize a novel view of the scene from a view point where there
Multi-view stereo. Many slides adapted from S. Seitz
 Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
Chaplin, Modern Times, 1936
 Chaplin, Modern Times, 1936 [A Bucket of Water and a Glass Matte: Special Effects in Modern Times; bonus feature on The Criterion Collection set] Multi-view geometry problems Structure: Given projections
Chaplin, Modern Times, 1936 [A Bucket of Water and a Glass Matte: Special Effects in Modern Times; bonus feature on The Criterion Collection set] Multi-view geometry problems Structure: Given projections
Homographies and RANSAC
 Homographies and RANSAC Computer vision 6.869 Bill Freeman and Antonio Torralba March 30, 2011 Homographies and RANSAC Homographies RANSAC Building panoramas Phototourism 2 Depth-based ambiguity of position
Homographies and RANSAC Computer vision 6.869 Bill Freeman and Antonio Torralba March 30, 2011 Homographies and RANSAC Homographies RANSAC Building panoramas Phototourism 2 Depth-based ambiguity of position
CSE 527: Introduction to Computer Vision
 CSE 527: Introduction to Computer Vision Week 5 - Class 1: Matching, Stitching, Registration September 26th, 2017 ??? Recap Today Feature Matching Image Alignment Panoramas HW2! Feature Matches Feature
CSE 527: Introduction to Computer Vision Week 5 - Class 1: Matching, Stitching, Registration September 26th, 2017 ??? Recap Today Feature Matching Image Alignment Panoramas HW2! Feature Matches Feature
Object and Motion Recognition using Plane Plus Parallax Displacement of Conics
 Object and Motion Recognition using Plane Plus Parallax Displacement of Conics Douglas R. Heisterkamp University of South Alabama Mobile, AL 6688-0002, USA dheister@jaguar1.usouthal.edu Prabir Bhattacharya
Object and Motion Recognition using Plane Plus Parallax Displacement of Conics Douglas R. Heisterkamp University of South Alabama Mobile, AL 6688-0002, USA dheister@jaguar1.usouthal.edu Prabir Bhattacharya
1-2 Feature-Based Image Mosaicing
 MVA'98 IAPR Workshop on Machine Vision Applications, Nov. 17-19, 1998, Makuhari, Chibq Japan 1-2 Feature-Based Image Mosaicing Naoki Chiba, Hiroshi Kano, Minoru Higashihara, Masashi Yasuda, and Masato
MVA'98 IAPR Workshop on Machine Vision Applications, Nov. 17-19, 1998, Makuhari, Chibq Japan 1-2 Feature-Based Image Mosaicing Naoki Chiba, Hiroshi Kano, Minoru Higashihara, Masashi Yasuda, and Masato
FLY THROUGH VIEW VIDEO GENERATION OF SOCCER SCENE
 FLY THROUGH VIEW VIDEO GENERATION OF SOCCER SCENE Naho INAMOTO and Hideo SAITO Keio University, Yokohama, Japan {nahotty,saito}@ozawa.ics.keio.ac.jp Abstract Recently there has been great deal of interest
FLY THROUGH VIEW VIDEO GENERATION OF SOCCER SCENE Naho INAMOTO and Hideo SAITO Keio University, Yokohama, Japan {nahotty,saito}@ozawa.ics.keio.ac.jp Abstract Recently there has been great deal of interest
Dense 3-D Reconstruction of an Outdoor Scene by Hundreds-baseline Stereo Using a Hand-held Video Camera
 Dense 3-D Reconstruction of an Outdoor Scene by Hundreds-baseline Stereo Using a Hand-held Video Camera Tomokazu Satoy, Masayuki Kanbaray, Naokazu Yokoyay and Haruo Takemuraz ygraduate School of Information
Dense 3-D Reconstruction of an Outdoor Scene by Hundreds-baseline Stereo Using a Hand-held Video Camera Tomokazu Satoy, Masayuki Kanbaray, Naokazu Yokoyay and Haruo Takemuraz ygraduate School of Information
CS 4495/7495 Computer Vision Frank Dellaert, Fall 07. Dense Stereo Some Slides by Forsyth & Ponce, Jim Rehg, Sing Bing Kang
 CS 4495/7495 Computer Vision Frank Dellaert, Fall 07 Dense Stereo Some Slides by Forsyth & Ponce, Jim Rehg, Sing Bing Kang Etymology Stereo comes from the Greek word for solid (στερεο), and the term can
CS 4495/7495 Computer Vision Frank Dellaert, Fall 07 Dense Stereo Some Slides by Forsyth & Ponce, Jim Rehg, Sing Bing Kang Etymology Stereo comes from the Greek word for solid (στερεο), and the term can
Contents I IMAGE FORMATION 1
 Contents I IMAGE FORMATION 1 1 Geometric Camera Models 3 1.1 Image Formation............................. 4 1.1.1 Pinhole Perspective....................... 4 1.1.2 Weak Perspective.........................
Contents I IMAGE FORMATION 1 1 Geometric Camera Models 3 1.1 Image Formation............................. 4 1.1.1 Pinhole Perspective....................... 4 1.1.2 Weak Perspective.........................
CS231A Midterm Review. Friday 5/6/2016
 CS231A Midterm Review Friday 5/6/2016 Outline General Logistics Camera Models Non-perspective cameras Calibration Single View Metrology Epipolar Geometry Structure from Motion Active Stereo and Volumetric
CS231A Midterm Review Friday 5/6/2016 Outline General Logistics Camera Models Non-perspective cameras Calibration Single View Metrology Epipolar Geometry Structure from Motion Active Stereo and Volumetric
Midterm Examination CS 534: Computational Photography
 Midterm Examination CS 534: Computational Photography November 3, 2016 NAME: Problem Score Max Score 1 6 2 8 3 9 4 12 5 4 6 13 7 7 8 6 9 9 10 6 11 14 12 6 Total 100 1 of 8 1. [6] (a) [3] What camera setting(s)
Midterm Examination CS 534: Computational Photography November 3, 2016 NAME: Problem Score Max Score 1 6 2 8 3 9 4 12 5 4 6 13 7 7 8 6 9 9 10 6 11 14 12 6 Total 100 1 of 8 1. [6] (a) [3] What camera setting(s)
Visual Odometry. Features, Tracking, Essential Matrix, and RANSAC. Stephan Weiss Computer Vision Group NASA-JPL / CalTech
 Visual Odometry Features, Tracking, Essential Matrix, and RANSAC Stephan Weiss Computer Vision Group NASA-JPL / CalTech Stephan.Weiss@ieee.org (c) 2013. Government sponsorship acknowledged. Outline The
Visual Odometry Features, Tracking, Essential Matrix, and RANSAC Stephan Weiss Computer Vision Group NASA-JPL / CalTech Stephan.Weiss@ieee.org (c) 2013. Government sponsorship acknowledged. Outline The
Probabilistic Tensor Voting for Robust Perceptual Grouping
 Probabilistic Tensor Voting for Robust Perceptual Grouping Dian Gong and Gérard Medioni Institute for Robotics and Intelligent Systems, University of Southern California Los Angeles, CA, 90089 {diangong
Probabilistic Tensor Voting for Robust Perceptual Grouping Dian Gong and Gérard Medioni Institute for Robotics and Intelligent Systems, University of Southern California Los Angeles, CA, 90089 {diangong
Estimation of common groundplane based on co-motion statistics
 Estimation of common groundplane based on co-motion statistics Zoltan Szlavik, Laszlo Havasi 2, Tamas Sziranyi Analogical and Neural Computing Laboratory, Computer and Automation Research Institute of
Estimation of common groundplane based on co-motion statistics Zoltan Szlavik, Laszlo Havasi 2, Tamas Sziranyi Analogical and Neural Computing Laboratory, Computer and Automation Research Institute of
Segmentation and Tracking of Partial Planar Templates
 Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
arxiv: v1 [cs.cv] 28 Sep 2018
![arxiv: v1 [cs.cv] 28 Sep 2018](/thumbs/93/113542646.jpg "arxiv: v1 [cs.cv] 28 Sep 2018") Camera Pose Estimation from Sequence of Calibrated Images arxiv:1809.11066v1 [cs.cv] 28 Sep 2018 Jacek Komorowski 1 and Przemyslaw Rokita 2 1 Maria Curie-Sklodowska University, Institute of Computer Science,
Camera Pose Estimation from Sequence of Calibrated Images arxiv:1809.11066v1 [cs.cv] 28 Sep 2018 Jacek Komorowski 1 and Przemyslaw Rokita 2 1 Maria Curie-Sklodowska University, Institute of Computer Science,
Outdoor Scene Reconstruction from Multiple Image Sequences Captured by a Hand-held Video Camera
 Outdoor Scene Reconstruction from Multiple Image Sequences Captured by a Hand-held Video Camera Tomokazu Sato, Masayuki Kanbara and Naokazu Yokoya Graduate School of Information Science, Nara Institute
Outdoor Scene Reconstruction from Multiple Image Sequences Captured by a Hand-held Video Camera Tomokazu Sato, Masayuki Kanbara and Naokazu Yokoya Graduate School of Information Science, Nara Institute
Motivation. Intensity Levels
 Motivation Image Intensity and Point Operations Dr. Edmund Lam Department of Electrical and Electronic Engineering The University of Hong ong A digital image is a matrix of numbers, each corresponding
Motivation Image Intensity and Point Operations Dr. Edmund Lam Department of Electrical and Electronic Engineering The University of Hong ong A digital image is a matrix of numbers, each corresponding
An Iterative Multi-Scale Tensor Voting Scheme for Perceptual Grouping of Natural Shapes in Cluttered Backgrounds
 An Iterative Multi-Scale Tensor Voting Scheme for Perceptual Grouping of Natural Shapes in Cluttered Backgrounds Leandro Loss 1, George Bebis 1, Mircea Nicolescu 1, and Alexei Skurikhin 2 1 Computer Vision
An Iterative Multi-Scale Tensor Voting Scheme for Perceptual Grouping of Natural Shapes in Cluttered Backgrounds Leandro Loss 1, George Bebis 1, Mircea Nicolescu 1, and Alexei Skurikhin 2 1 Computer Vision
Multi-Camera Calibration, Object Tracking and Query Generation
 MITSUBISHI ELECTRIC RESEARCH LABORATORIES http://www.merl.com Multi-Camera Calibration, Object Tracking and Query Generation Porikli, F.; Divakaran, A. TR2003-100 August 2003 Abstract An automatic object
MITSUBISHI ELECTRIC RESEARCH LABORATORIES http://www.merl.com Multi-Camera Calibration, Object Tracking and Query Generation Porikli, F.; Divakaran, A. TR2003-100 August 2003 Abstract An automatic object
Prof. Fanny Ficuciello Robotics for Bioengineering Visual Servoing
 Visual servoing vision allows a robotic system to obtain geometrical and qualitative information on the surrounding environment high level control motion planning (look-and-move visual grasping) low level
Visual servoing vision allows a robotic system to obtain geometrical and qualitative information on the surrounding environment high level control motion planning (look-and-move visual grasping) low level
Computer Vision and Image Understanding
 Computer Vision and Image Understanding 113 (2009) 126 149 Contents lists available at ScienceDirect Computer Vision and Image Understanding journal homepage: www.elsevier.com/locate/cviu An iterative
Computer Vision and Image Understanding 113 (2009) 126 149 Contents lists available at ScienceDirect Computer Vision and Image Understanding journal homepage: www.elsevier.com/locate/cviu An iterative
Multibody reconstruction of the dynamic scene surrounding a vehicle using a wide baseline and multifocal stereo system
 Multibody reconstruction of the dynamic scene surrounding a vehicle using a wide baseline and multifocal stereo system Laurent Mennillo 1,2, Éric Royer1, Frédéric Mondot 2, Johann Mousain 2, Michel Dhome
Multibody reconstruction of the dynamic scene surrounding a vehicle using a wide baseline and multifocal stereo system Laurent Mennillo 1,2, Éric Royer1, Frédéric Mondot 2, Johann Mousain 2, Michel Dhome
Multi-View Stereo for Static and Dynamic Scenes
 Multi-View Stereo for Static and Dynamic Scenes Wolfgang Burgard Jan 6, 2010 Main references Yasutaka Furukawa and Jean Ponce, Accurate, Dense and Robust Multi-View Stereopsis, 2007 C.L. Zitnick, S.B.
Multi-View Stereo for Static and Dynamic Scenes Wolfgang Burgard Jan 6, 2010 Main references Yasutaka Furukawa and Jean Ponce, Accurate, Dense and Robust Multi-View Stereopsis, 2007 C.L. Zitnick, S.B.
Targil 10 : Why Mosaic? Why is this a challenge? Exposure differences Scene illumination Miss-registration Moving objects
 Why Mosaic? Are you getting the whole picture? Compact Camera FOV = 5 x 35 Targil : Panoramas - Stitching and Blending Some slides from Alexei Efros 2 Slide from Brown & Lowe Why Mosaic? Are you getting
Why Mosaic? Are you getting the whole picture? Compact Camera FOV = 5 x 35 Targil : Panoramas - Stitching and Blending Some slides from Alexei Efros 2 Slide from Brown & Lowe Why Mosaic? Are you getting
Learning and Inferring Depth from Monocular Images. Jiyan Pan April 1, 2009
 Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
Last update: May 4, Vision. CMSC 421: Chapter 24. CMSC 421: Chapter 24 1
 Last update: May 4, 200 Vision CMSC 42: Chapter 24 CMSC 42: Chapter 24 Outline Perception generally Image formation Early vision 2D D Object recognition CMSC 42: Chapter 24 2 Perception generally Stimulus
Last update: May 4, 200 Vision CMSC 42: Chapter 24 CMSC 42: Chapter 24 Outline Perception generally Image formation Early vision 2D D Object recognition CMSC 42: Chapter 24 2 Perception generally Stimulus
3D Editing System for Captured Real Scenes
 3D Editing System for Captured Real Scenes Inwoo Ha, Yong Beom Lee and James D.K. Kim Samsung Advanced Institute of Technology, Youngin, South Korea E-mail: {iw.ha, leey, jamesdk.kim}@samsung.com Tel:
3D Editing System for Captured Real Scenes Inwoo Ha, Yong Beom Lee and James D.K. Kim Samsung Advanced Institute of Technology, Youngin, South Korea E-mail: {iw.ha, leey, jamesdk.kim}@samsung.com Tel:
Towards the completion of assignment 1
 Towards the completion of assignment 1 What to do for calibration What to do for point matching What to do for tracking What to do for GUI COMPSCI 773 Feature Point Detection Why study feature point detection?
Towards the completion of assignment 1 What to do for calibration What to do for point matching What to do for tracking What to do for GUI COMPSCI 773 Feature Point Detection Why study feature point detection?
III. VERVIEW OF THE METHODS
 An Analytical Study of SIFT and SURF in Image Registration Vivek Kumar Gupta, Kanchan Cecil Department of Electronics & Telecommunication, Jabalpur engineering college, Jabalpur, India comparing the distance
An Analytical Study of SIFT and SURF in Image Registration Vivek Kumar Gupta, Kanchan Cecil Department of Electronics & Telecommunication, Jabalpur engineering college, Jabalpur, India comparing the distance
Fast Natural Feature Tracking for Mobile Augmented Reality Applications
 Fast Natural Feature Tracking for Mobile Augmented Reality Applications Jong-Seung Park 1, Byeong-Jo Bae 2, and Ramesh Jain 3 1 Dept. of Computer Science & Eng., University of Incheon, Korea 2 Hyundai
Fast Natural Feature Tracking for Mobile Augmented Reality Applications Jong-Seung Park 1, Byeong-Jo Bae 2, and Ramesh Jain 3 1 Dept. of Computer Science & Eng., University of Incheon, Korea 2 Hyundai
Depth. Common Classification Tasks. Example: AlexNet. Another Example: Inception. Another Example: Inception. Depth
 Common Classification Tasks Recognition of individual objects/faces Analyze object-specific features (e.g., key points) Train with images from different viewing angles Recognition of object classes Analyze
Common Classification Tasks Recognition of individual objects/faces Analyze object-specific features (e.g., key points) Train with images from different viewing angles Recognition of object classes Analyze
Image stitching. Announcements. Outline. Image stitching
 Announcements Image stitching Project #1 was due yesterday. Project #2 handout will be available on the web later tomorrow. I will set up a webpage for artifact voting soon. Digital Visual Effects, Spring
Announcements Image stitching Project #1 was due yesterday. Project #2 handout will be available on the web later tomorrow. I will set up a webpage for artifact voting soon. Digital Visual Effects, Spring
Data Term. Michael Bleyer LVA Stereo Vision
 Data Term Michael Bleyer LVA Stereo Vision What happened last time? We have looked at our energy function: E ( D) = m( p, dp) + p I < p, q > N s( p, q) We have learned about an optimization algorithm that
Data Term Michael Bleyer LVA Stereo Vision What happened last time? We have looked at our energy function: E ( D) = m( p, dp) + p I < p, q > N s( p, q) We have learned about an optimization algorithm that
Using Shape Priors to Regularize Intermediate Views in Wide-Baseline Image-Based Rendering
 Using Shape Priors to Regularize Intermediate Views in Wide-Baseline Image-Based Rendering Cédric Verleysen¹, T. Maugey², P. Frossard², C. De Vleeschouwer¹ ¹ ICTEAM institute, UCL (Belgium) ; ² LTS4 lab,
Using Shape Priors to Regularize Intermediate Views in Wide-Baseline Image-Based Rendering Cédric Verleysen¹, T. Maugey², P. Frossard², C. De Vleeschouwer¹ ¹ ICTEAM institute, UCL (Belgium) ; ² LTS4 lab,
Recovering Partial 3D Wire Frames Descriptions from Stereo Data
 Recovering Partial 3D Wire Frames Descriptions from Stereo Data Stephen B Pollard, John Porrill and John E W Mayhew AIVRU University of Sheffield We describe the design of modules in the current version
Recovering Partial 3D Wire Frames Descriptions from Stereo Data Stephen B Pollard, John Porrill and John E W Mayhew AIVRU University of Sheffield We describe the design of modules in the current version
CS201 Computer Vision Camera Geometry
 CS201 Computer Vision Camera Geometry John Magee 25 November, 2014 Slides Courtesy of: Diane H. Theriault (deht@bu.edu) Question of the Day: How can we represent the relationships between cameras and the
CS201 Computer Vision Camera Geometry John Magee 25 November, 2014 Slides Courtesy of: Diane H. Theriault (deht@bu.edu) Question of the Day: How can we represent the relationships between cameras and the
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 12 130228 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Panoramas, Mosaics, Stitching Two View Geometry
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 12 130228 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Panoramas, Mosaics, Stitching Two View Geometry
An Algorithm for Seamless Image Stitching and Its Application
 An Algorithm for Seamless Image Stitching and Its Application Jing Xing, Zhenjiang Miao, and Jing Chen Institute of Information Science, Beijing JiaoTong University, Beijing 100044, P.R. China Abstract.
An Algorithm for Seamless Image Stitching and Its Application Jing Xing, Zhenjiang Miao, and Jing Chen Institute of Information Science, Beijing JiaoTong University, Beijing 100044, P.R. China Abstract.
Non-Differentiable Image Manifolds
 The Multiscale Structure of Non-Differentiable Image Manifolds Michael Wakin Electrical l Engineering i Colorado School of Mines Joint work with Richard Baraniuk, Hyeokho Choi, David Donoho Models for
The Multiscale Structure of Non-Differentiable Image Manifolds Michael Wakin Electrical l Engineering i Colorado School of Mines Joint work with Richard Baraniuk, Hyeokho Choi, David Donoho Models for
Automatic Photo Popup
 Automatic Photo Popup Derek Hoiem Alexei A. Efros Martial Hebert Carnegie Mellon University What Is Automatic Photo Popup Introduction Creating 3D models from images is a complex process Time-consuming
Automatic Photo Popup Derek Hoiem Alexei A. Efros Martial Hebert Carnegie Mellon University What Is Automatic Photo Popup Introduction Creating 3D models from images is a complex process Time-consuming
Image-based Modeling and Rendering: 8. Image Transformation and Panorama
 Image-based Modeling and Rendering: 8. Image Transformation and Panorama I-Chen Lin, Assistant Professor Dept. of CS, National Chiao Tung Univ, Taiwan Outline Image transformation How to represent the
Image-based Modeling and Rendering: 8. Image Transformation and Panorama I-Chen Lin, Assistant Professor Dept. of CS, National Chiao Tung Univ, Taiwan Outline Image transformation How to represent the
Video Alignment. Literature Survey. Spring 2005 Prof. Brian Evans Multidimensional Digital Signal Processing Project The University of Texas at Austin
 Literature Survey Spring 2005 Prof. Brian Evans Multidimensional Digital Signal Processing Project The University of Texas at Austin Omer Shakil Abstract This literature survey compares various methods
Literature Survey Spring 2005 Prof. Brian Evans Multidimensional Digital Signal Processing Project The University of Texas at Austin Omer Shakil Abstract This literature survey compares various methods
Incremental Real-time Bundle Adjustment for Multi-camera Systems with Points at Infinity
 Incremental Real-time Bundle Adjustment for Multi-camera Systems with Points at Infinity Johannes Schneider, Thomas Läbe, Wolfgang Förstner 1 Department of Photogrammetry Institute of Geodesy and Geoinformation
Incremental Real-time Bundle Adjustment for Multi-camera Systems with Points at Infinity Johannes Schneider, Thomas Läbe, Wolfgang Förstner 1 Department of Photogrammetry Institute of Geodesy and Geoinformation
LOCAL AND GLOBAL DESCRIPTORS FOR PLACE RECOGNITION IN ROBOTICS
 8th International DAAAM Baltic Conference "INDUSTRIAL ENGINEERING - 19-21 April 2012, Tallinn, Estonia LOCAL AND GLOBAL DESCRIPTORS FOR PLACE RECOGNITION IN ROBOTICS Shvarts, D. & Tamre, M. Abstract: The
8th International DAAAM Baltic Conference "INDUSTRIAL ENGINEERING - 19-21 April 2012, Tallinn, Estonia LOCAL AND GLOBAL DESCRIPTORS FOR PLACE RECOGNITION IN ROBOTICS Shvarts, D. & Tamre, M. Abstract: The
Tensor Voting: Theory and Applications
 Tensor Voting: Theory and Applications Gérard Medioni Chi-Keung Tang Mi-Suen Lee Institute for Robotics & Intelligent Systems Computer Science Department Philips Research USC, Los Angeles, CA 90089 HKUST,
Tensor Voting: Theory and Applications Gérard Medioni Chi-Keung Tang Mi-Suen Lee Institute for Robotics & Intelligent Systems Computer Science Department Philips Research USC, Los Angeles, CA 90089 HKUST,
Detection of a Single Hand Shape in the Foreground of Still Images
 CS229 Project Final Report Detection of a Single Hand Shape in the Foreground of Still Images Toan Tran (dtoan@stanford.edu) 1. Introduction This paper is about an image detection system that can detect
CS229 Project Final Report Detection of a Single Hand Shape in the Foreground of Still Images Toan Tran (dtoan@stanford.edu) 1. Introduction This paper is about an image detection system that can detect
Matching. Compare region of image to region of image. Today, simplest kind of matching. Intensities similar.
 Matching Compare region of image to region of image. We talked about this for stereo. Important for motion. Epipolar constraint unknown. But motion small. Recognition Find object in image. Recognize object.
Matching Compare region of image to region of image. We talked about this for stereo. Important for motion. Epipolar constraint unknown. But motion small. Recognition Find object in image. Recognize object.
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 10 130221 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Canny Edge Detector Hough Transform Feature-Based
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 10 130221 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Canny Edge Detector Hough Transform Feature-Based
CHAPTER 3 DISPARITY AND DEPTH MAP COMPUTATION
 CHAPTER 3 DISPARITY AND DEPTH MAP COMPUTATION In this chapter we will discuss the process of disparity computation. It plays an important role in our caricature system because all 3D coordinates of nodes
CHAPTER 3 DISPARITY AND DEPTH MAP COMPUTATION In this chapter we will discuss the process of disparity computation. It plays an important role in our caricature system because all 3D coordinates of nodes
MANY complex video-related vision tasks require the
 IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 30, NO. 9, SEPTEMBER 2008 1589 Inferring Segmented Dense Motion Layers Using 5D Tensor Voting Changki Min and Gérard Medioni, Fellow,
IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 30, NO. 9, SEPTEMBER 2008 1589 Inferring Segmented Dense Motion Layers Using 5D Tensor Voting Changki Min and Gérard Medioni, Fellow,
Simultaneous Two-View Epipolar Geometry Estimation and Motion Segmentation by 4D Tensor Voting
 IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 26, NO. 9, SEPTEMBER 2004 1167 Simultaneous Two-View Epipolar Geometry Estimation and Motion Segmentation by 4D Tensor Voting Wai-Shun
IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 26, NO. 9, SEPTEMBER 2004 1167 Simultaneous Two-View Epipolar Geometry Estimation and Motion Segmentation by 4D Tensor Voting Wai-Shun
Rotation Invariant Image Registration using Robust Shape Matching
 International Journal of Electronic and Electrical Engineering. ISSN 0974-2174 Volume 7, Number 2 (2014), pp. 125-132 International Research Publication House http://www.irphouse.com Rotation Invariant
International Journal of Electronic and Electrical Engineering. ISSN 0974-2174 Volume 7, Number 2 (2014), pp. 125-132 International Research Publication House http://www.irphouse.com Rotation Invariant
Texture Sensitive Image Inpainting after Object Morphing
 Texture Sensitive Image Inpainting after Object Morphing Yin Chieh Liu and Yi-Leh Wu Department of Computer Science and Information Engineering National Taiwan University of Science and Technology, Taiwan
Texture Sensitive Image Inpainting after Object Morphing Yin Chieh Liu and Yi-Leh Wu Department of Computer Science and Information Engineering National Taiwan University of Science and Technology, Taiwan
calibrated coordinates Linear transformation pixel coordinates
 1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
Invariant Features from Interest Point Groups
 Invariant Features from Interest Point Groups Matthew Brown and David Lowe {mbrown lowe}@cs.ubc.ca Department of Computer Science, University of British Columbia, Vancouver, Canada. Abstract This paper
Invariant Features from Interest Point Groups Matthew Brown and David Lowe {mbrown lowe}@cs.ubc.ca Department of Computer Science, University of British Columbia, Vancouver, Canada. Abstract This paper
What have we leaned so far?
 What have we leaned so far? Camera structure Eye structure Project 1: High Dynamic Range Imaging What have we learned so far? Image Filtering Image Warping Camera Projection Model Project 2: Panoramic
What have we leaned so far? Camera structure Eye structure Project 1: High Dynamic Range Imaging What have we learned so far? Image Filtering Image Warping Camera Projection Model Project 2: Panoramic
IMAGE DENOISING TO ESTIMATE THE GRADIENT HISTOGRAM PRESERVATION USING VARIOUS ALGORITHMS
 IMAGE DENOISING TO ESTIMATE THE GRADIENT HISTOGRAM PRESERVATION USING VARIOUS ALGORITHMS P.Mahalakshmi 1, J.Muthulakshmi 2, S.Kannadhasan 3 1,2 U.G Student, 3 Assistant Professor, Department of Electronics
IMAGE DENOISING TO ESTIMATE THE GRADIENT HISTOGRAM PRESERVATION USING VARIOUS ALGORITHMS P.Mahalakshmi 1, J.Muthulakshmi 2, S.Kannadhasan 3 1,2 U.G Student, 3 Assistant Professor, Department of Electronics
Introduction to Computer Vision
 Introduction to Computer Vision Dr. Gerhard Roth COMP 4102A Winter 2015 Version 2 General Information Instructor: Adjunct Prof. Dr. Gerhard Roth gerhardroth@rogers.com read hourly gerhardroth@cmail.carleton.ca
Introduction to Computer Vision Dr. Gerhard Roth COMP 4102A Winter 2015 Version 2 General Information Instructor: Adjunct Prof. Dr. Gerhard Roth gerhardroth@rogers.com read hourly gerhardroth@cmail.carleton.ca
CRF Based Point Cloud Segmentation Jonathan Nation
 CRF Based Point Cloud Segmentation Jonathan Nation jsnation@stanford.edu 1. INTRODUCTION The goal of the project is to use the recently proposed fully connected conditional random field (CRF) model to
CRF Based Point Cloud Segmentation Jonathan Nation jsnation@stanford.edu 1. INTRODUCTION The goal of the project is to use the recently proposed fully connected conditional random field (CRF) model to
Morphological Corner Detection
 Morphological Corner Detection Robert Laganière School of Information Technology and Engineering University of Ottawa Ottawa, Ont. CANADA K1N 6N5 Abstract This paper presents a new operator for corner
Morphological Corner Detection Robert Laganière School of Information Technology and Engineering University of Ottawa Ottawa, Ont. CANADA K1N 6N5 Abstract This paper presents a new operator for corner