Sampling-Based Motion Planning
|
|
|
- Veronica Cox
- 6 years ago
- Views:
Transcription
1 Sampling-Based Motion Planning Pieter Abbeel UC Berkeley EECS Many images from Lavalle, Planning Algorithms
2 Motion Planning Problem Given start state x S, goal state x G Asked for: a sequence of control inputs that leads from start to goal Why tricky? Need to avoid obstacles For systems with underactuated dynamics: can t simply move along any coordinate at will E.g., car, helicopter, airplane, but also robot manipulator hitting joint limits
3 Solve by Nonlinear Optimization for Control? Could try by, for example, following formulation: X t can encode obstacles Or, with constraints, (which would require using an infeasible method): Can work surprisingly well, but for more complicated problems with longer horizons, often get stuck in local maxima that don t reach the goal

4 Examples Helicopter path planning Swinging up cart-pole Acrobot


5 Examples


6 Examples
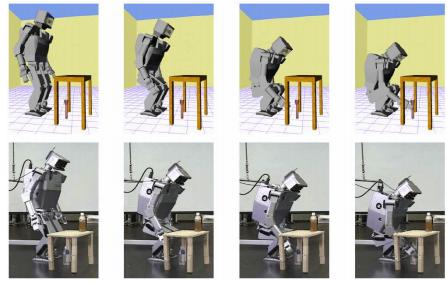
7 Examples
8 Motion Planning: Outline Configuration Space Probabilistic Roadmap Boundary Value Problem Sampling Collision checking Rapidly-exploring Random Trees (RRTs) Smoothing
9 Configuration Space (C-Space) = { x x is a pose of the robot} obstacles à configuration space obstacles Workspace Configuration Space (2 DOF: translation only, no rotation) free space obstacles

10 Motion planning
11 Probabilistic Roadmap (PRM) Space R n forbidden space Free/feasible space 11
12 Probabilistic Roadmap (PRM) Configurations are sampled by picking coordinates at random 12
13 Probabilistic Roadmap (PRM) Configurations are sampled by picking coordinates at random 13
14 Probabilistic Roadmap (PRM) Sampled configurations are tested for collision 14
15 Probabilistic Roadmap (PRM) The collision-free configurations are retained as milestones 15
16 Probabilistic Roadmap (PRM) Each milestone is linked by straight paths to its nearest neighbors 16
17 Probabilistic Roadmap (PRM) Each milestone is linked by straight paths to its nearest neighbors 17
18 Probabilistic Roadmap (PRM) The collision-free links are retained as local paths to form the PRM 18
19 Probabilistic Roadmap (PRM) The start and goal configurations are included as milestones s g 19
20 Probabilistic Roadmap (PRM) The PRM is searched for a path from s to g s g 20
21 Probabilistic Roadmap Initialize set of points with x S and x G Randomly sample points in configuration space Connect nearby points if they can be reached from each other Find path from x S to x G in the graph Alternatively: keep track of connected components incrementally, and declare success when x S and x G are in same connected component

22 PRM example

23 PRM example 2
24 Sampling How to sample uniformly at random from [0,1] n? Sample uniformly at random from [0,1] for each coordinate How to sample uniformly at random from the surface of the n-d unit sphere? Sample from n-d Gaussian à isotropic; then just normalize How to sample uniformly at random for orientations in 3-D?
25 PRM: Challenges 1. Connecting neighboring points: Only easy for holonomic systems (i.e., for which you can move each degree of freedom at will at any time). Generally requires solving a Boundary Value Problem Typically solved without collision checking; later verified if valid by collision checking 2. Collision checking: Often takes majority of time in applications (see Lavalle)
26 PRM s Pros and Cons Pro: Probabilistically complete: i.e., with probability one, if run for long enough the graph will contain a solution path if one exists. Cons: Required to solve 2 point boundary value problem Build graph over state space but no particular focus on generating a path
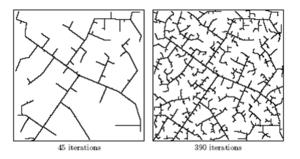
27 Rapidly exploring Random Trees Basic idea: Build up a tree through generating next states in the tree by executing random controls However: not exactly above to ensure good coverage
28 Rapidly-exploring Random Trees (RRT) RANDOM_STATE(): often uniformly at random over space with probability 99%, and the goal state with probability 1%, this ensures it attempts to connect to goal semi-regularly
29 RRT Practicalities NEAREST_NEIGHBOR(x rand, T): need to find (approximate) nearest neighbor efficiently KD Trees data structure (upto 20-D) [e.g., FLANN] Locality Sensitive Hashing SELECT_INPUT(x rand, x near ) Two point boundary value problem If too hard to solve, often just select best out of a set of control sequences. This set could be random, or some well chosen set of primitives.
30 RRT Extension No obstacles, holonomic: With obstacles, holonomic: Non-holonomic: approximately (sometimes as approximate as picking best of a few random control sequences) solve two-point boundary value problem
31 Growing RRT Demo:
32 Bi-directional RRT Volume swept out by unidirectional RRT: x S x G Volume swept out by bi-directional RRT: x S x G Difference becomes far more pronounced in higher dimensions
33 Multi-directional RRT Planning around obstacles or through narrow passages can often be easier in one direction than the other
 Initialize CVF to zero when node is added to tree Whenever an expansion from the node is")
34 Resolution-Complete RRT (RC-RRT) Issue: nearest points chosen for expansion are (too) often the ones stuck behind an obstacle RC-RRT solution: Choose a maximum number of times, m, you are willing to try to expand each node For each node in the tree, keep track of its Constraint Violation Frequency (CVF) Initialize CVF to zero when node is added to tree Whenever an expansion from the node is unsuccessful (e.g., per hitting an obstacle): Increase CVF of that node by 1 Increase CVF of its parent node by 1/m, its grandparent 1/m 2, When a node is selected for expansion, skip over it with probability CVF/m
35 RRT* Source: Karaman and Frazzoli
36 RRT* Asymptotically optimal Main idea: Swap new point in as parent for nearby vertices who can be reached along shorter path through new point than through their original (current) parent


37 RRT* RRT RRT* Source: Karaman and Frazzoli

38 RRT* RRT RRT* Source: Karaman and Frazzoli

39 LQR-trees (Tedrake, IJRR 2010) Idea: grow a randomized tree of stabilizing controllers to the goal Like RRT Can discard sample points in already stabilized region
40 LQR-trees (Tedrake) Ck: stabilized region after iteration k
")
41 LQR-trees (Tedrake)
42 Smoothing Randomized motion planners tend to find not so great paths for execution: very jagged, often much longer than necessary. à In practice: do smoothing before using the path Shortcutting: along the found path, pick two vertices x t1, x t2 and try to connect them directly (skipping over all intermediate vertices) Nonlinear optimization for optimal control Allows to specify an objective function that includes smoothness in state, control, small control inputs, etc.
Func%on Approxima%on. Pieter Abbeel UC Berkeley EECS
 Func%on Approxima%on Pieter Abbeel UC Berkeley EECS Value Itera4on Algorithm: Start with for all s. For i=1,, H For all states s 2 S: Imprac4cal for large state spaces = the expected sum of rewards accumulated
Func%on Approxima%on Pieter Abbeel UC Berkeley EECS Value Itera4on Algorithm: Start with for all s. For i=1,, H For all states s 2 S: Imprac4cal for large state spaces = the expected sum of rewards accumulated
Planning & Decision-making in Robotics Planning Representations/Search Algorithms: RRT, RRT-Connect, RRT*
 16-782 Planning & Decision-making in Robotics Planning Representations/Search Algorithms: RRT, RRT-Connect, RRT* Maxim Likhachev Robotics Institute Carnegie Mellon University Probabilistic Roadmaps (PRMs)
16-782 Planning & Decision-making in Robotics Planning Representations/Search Algorithms: RRT, RRT-Connect, RRT* Maxim Likhachev Robotics Institute Carnegie Mellon University Probabilistic Roadmaps (PRMs)
Sampling-based Planning 2
 RBE MOTION PLANNING Sampling-based Planning 2 Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Problem with KD-tree RBE MOTION PLANNING Curse of dimension
RBE MOTION PLANNING Sampling-based Planning 2 Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Problem with KD-tree RBE MOTION PLANNING Curse of dimension
CS 4649/7649 Robot Intelligence: Planning
 CS 4649/7649 Robot Intelligence: Planning Probabilistic Roadmaps Sungmoon Joo School of Interactive Computing College of Computing Georgia Institute of Technology S. Joo (sungmoon.joo@cc.gatech.edu) 1
CS 4649/7649 Robot Intelligence: Planning Probabilistic Roadmaps Sungmoon Joo School of Interactive Computing College of Computing Georgia Institute of Technology S. Joo (sungmoon.joo@cc.gatech.edu) 1
Lecture Schedule Week Date Lecture (W: 3:05p-4:50, 7-222)
") 2017 School of Information Technology and Electrical Engineering at the University of Queensland Lecture Schedule Week Date Lecture (W: 3:05p-4:50, 7-222) 1 26-Jul Introduction + 2 2-Aug Representing Position
2017 School of Information Technology and Electrical Engineering at the University of Queensland Lecture Schedule Week Date Lecture (W: 3:05p-4:50, 7-222) 1 26-Jul Introduction + 2 2-Aug Representing Position
Robot Motion Planning
 Robot Motion Planning James Bruce Computer Science Department Carnegie Mellon University April 7, 2004 Agent Planning An agent is a situated entity which can choose and execute actions within in an environment.
Robot Motion Planning James Bruce Computer Science Department Carnegie Mellon University April 7, 2004 Agent Planning An agent is a situated entity which can choose and execute actions within in an environment.
6.141: Robotics systems and science Lecture 9: Configuration Space and Motion Planning
 6.141: Robotics systems and science Lecture 9: Configuration Space and Motion Planning Lecture Notes Prepared by Daniela Rus EECS/MIT Spring 2012 Figures by Nancy Amato, Rodney Brooks, Vijay Kumar Reading:
6.141: Robotics systems and science Lecture 9: Configuration Space and Motion Planning Lecture Notes Prepared by Daniela Rus EECS/MIT Spring 2012 Figures by Nancy Amato, Rodney Brooks, Vijay Kumar Reading:
Configuration Space of a Robot
 Robot Path Planning Overview: 1. Visibility Graphs 2. Voronoi Graphs 3. Potential Fields 4. Sampling-Based Planners PRM: Probabilistic Roadmap Methods RRTs: Rapidly-exploring Random Trees Configuration
Robot Path Planning Overview: 1. Visibility Graphs 2. Voronoi Graphs 3. Potential Fields 4. Sampling-Based Planners PRM: Probabilistic Roadmap Methods RRTs: Rapidly-exploring Random Trees Configuration
Algorithms for Sensor-Based Robotics: Sampling-Based Motion Planning
 Algorithms for Sensor-Based Robotics: Sampling-Based Motion Planning Computer Science 336 http://www.cs.jhu.edu/~hager/teaching/cs336 Professor Hager http://www.cs.jhu.edu/~hager Recall Earlier Methods
Algorithms for Sensor-Based Robotics: Sampling-Based Motion Planning Computer Science 336 http://www.cs.jhu.edu/~hager/teaching/cs336 Professor Hager http://www.cs.jhu.edu/~hager Recall Earlier Methods
Algorithms for Sensor-Based Robotics: Sampling-Based Motion Planning
 Algorithms for Sensor-Based Robotics: Sampling-Based Motion Planning Computer Science 336 http://www.cs.jhu.edu/~hager/teaching/cs336 Professor Hager http://www.cs.jhu.edu/~hager Recall Earlier Methods
Algorithms for Sensor-Based Robotics: Sampling-Based Motion Planning Computer Science 336 http://www.cs.jhu.edu/~hager/teaching/cs336 Professor Hager http://www.cs.jhu.edu/~hager Recall Earlier Methods
Geometric Path Planning McGill COMP 765 Oct 12 th, 2017
 Geometric Path Planning McGill COMP 765 Oct 12 th, 2017 The Motion Planning Problem Intuition: Find a safe path/trajectory from start to goal More precisely: A path is a series of robot configurations
Geometric Path Planning McGill COMP 765 Oct 12 th, 2017 The Motion Planning Problem Intuition: Find a safe path/trajectory from start to goal More precisely: A path is a series of robot configurations
Introduction to State-of-the-art Motion Planning Algorithms. Presented by Konstantinos Tsianos
 Introduction to State-of-the-art Motion Planning Algorithms Presented by Konstantinos Tsianos Robots need to move! Motion Robot motion must be continuous Geometric constraints Dynamic constraints Safety
Introduction to State-of-the-art Motion Planning Algorithms Presented by Konstantinos Tsianos Robots need to move! Motion Robot motion must be continuous Geometric constraints Dynamic constraints Safety
Humanoid Robotics. Inverse Kinematics and Whole-Body Motion Planning. Maren Bennewitz
 Humanoid Robotics Inverse Kinematics and Whole-Body Motion Planning Maren Bennewitz 1 Motivation Planning for object manipulation Whole-body motion to reach a desired goal configuration Generate a sequence
Humanoid Robotics Inverse Kinematics and Whole-Body Motion Planning Maren Bennewitz 1 Motivation Planning for object manipulation Whole-body motion to reach a desired goal configuration Generate a sequence
LQR-RRT : Optimal Sampling-Based Motion Planning with Automatically Derived Extension Heuristics
 LQR-RRT : Optimal Sampling-Based Motion Planning with Automatically Derived Extension Heuristics Alejandro Perez, Robert Platt Jr., George Konidaris, Leslie Kaelbling and Tomas Lozano-Perez Computer Science
LQR-RRT : Optimal Sampling-Based Motion Planning with Automatically Derived Extension Heuristics Alejandro Perez, Robert Platt Jr., George Konidaris, Leslie Kaelbling and Tomas Lozano-Perez Computer Science
Humanoid Robotics. Inverse Kinematics and Whole-Body Motion Planning. Maren Bennewitz
 Humanoid Robotics Inverse Kinematics and Whole-Body Motion Planning Maren Bennewitz 1 Motivation Plan a sequence of configurations (vector of joint angle values) that let the robot move from its current
Humanoid Robotics Inverse Kinematics and Whole-Body Motion Planning Maren Bennewitz 1 Motivation Plan a sequence of configurations (vector of joint angle values) that let the robot move from its current
6.141: Robotics systems and science Lecture 9: Configuration Space and Motion Planning
 6.141: Robotics systems and science Lecture 9: Configuration Space and Motion Planning Lecture Notes Prepared by Daniela Rus EECS/MIT Spring 2011 Figures by Nancy Amato, Rodney Brooks, Vijay Kumar Reading:
6.141: Robotics systems and science Lecture 9: Configuration Space and Motion Planning Lecture Notes Prepared by Daniela Rus EECS/MIT Spring 2011 Figures by Nancy Amato, Rodney Brooks, Vijay Kumar Reading:
Probabilistic Methods for Kinodynamic Path Planning
 16.412/6.834J Cognitive Robotics February 7 th, 2005 Probabilistic Methods for Kinodynamic Path Planning Based on Past Student Lectures by: Paul Elliott, Aisha Walcott, Nathan Ickes and Stanislav Funiak
16.412/6.834J Cognitive Robotics February 7 th, 2005 Probabilistic Methods for Kinodynamic Path Planning Based on Past Student Lectures by: Paul Elliott, Aisha Walcott, Nathan Ickes and Stanislav Funiak
Sampling-Based Robot Motion Planning. Lydia Kavraki Department of Computer Science Rice University Houston, TX USA
 Sampling-Based Robot Motion Planning Lydia Kavraki Department of Computer Science Rice University Houston, TX USA Motion planning: classical setting Go from Start to Goal without collisions and while respecting
Sampling-Based Robot Motion Planning Lydia Kavraki Department of Computer Science Rice University Houston, TX USA Motion planning: classical setting Go from Start to Goal without collisions and while respecting
Non-holonomic Planning
 Non-holonomic Planning Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Recap We have learned about RRTs. q new q init q near q rand But the standard
Non-holonomic Planning Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Recap We have learned about RRTs. q new q init q near q rand But the standard
Motion Planning: Probabilistic Roadmaps. Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo
 Motion Planning: Probabilistic Roadmaps Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Tratto dalla lezione: Basic Motion Planning for a Point Robot CS 326A: Motion Planning ai.stanford.edu/~latombe/cs326/2007/index.htm
Motion Planning: Probabilistic Roadmaps Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Tratto dalla lezione: Basic Motion Planning for a Point Robot CS 326A: Motion Planning ai.stanford.edu/~latombe/cs326/2007/index.htm
Learning to Guide Random Tree Planners in High Dimensional Spaces
 Learning to Guide Random Tree Planners in High Dimensional Spaces Jörg Röwekämper Gian Diego Tipaldi Wolfram Burgard Fig. 1. Example paths for a mobile manipulation platform computed with RRT-Connect [13]
Learning to Guide Random Tree Planners in High Dimensional Spaces Jörg Röwekämper Gian Diego Tipaldi Wolfram Burgard Fig. 1. Example paths for a mobile manipulation platform computed with RRT-Connect [13]
Probabilistic Motion Planning: Algorithms and Applications
 Probabilistic Motion Planning: Algorithms and Applications Jyh-Ming Lien Department of Computer Science George Mason University Motion Planning in continuous spaces (Basic) Motion Planning (in a nutshell):
Probabilistic Motion Planning: Algorithms and Applications Jyh-Ming Lien Department of Computer Science George Mason University Motion Planning in continuous spaces (Basic) Motion Planning (in a nutshell):
Part I Part 1 Sampling-based Motion Planning
 Overview of the Lecture Randomized Sampling-based Motion Planning Methods Jan Faigl Department of Computer Science Faculty of Electrical Engineering Czech Technical University in Prague Lecture 05 B4M36UIR
Overview of the Lecture Randomized Sampling-based Motion Planning Methods Jan Faigl Department of Computer Science Faculty of Electrical Engineering Czech Technical University in Prague Lecture 05 B4M36UIR
Part I Part 1 Sampling-based Motion Planning
 Overview of the Lecture Randomized Sampling-based Motion Planning Methods Jan Faigl Department of Computer Science Faculty of Electrical Engineering Czech Technical University in Prague Lecture 06 B4M36UIR
Overview of the Lecture Randomized Sampling-based Motion Planning Methods Jan Faigl Department of Computer Science Faculty of Electrical Engineering Czech Technical University in Prague Lecture 06 B4M36UIR
Advanced Robotics Path Planning & Navigation
 Advanced Robotics Path Planning & Navigation 1 Agenda Motivation Basic Definitions Configuration Space Global Planning Local Planning Obstacle Avoidance ROS Navigation Stack 2 Literature Choset, Lynch,
Advanced Robotics Path Planning & Navigation 1 Agenda Motivation Basic Definitions Configuration Space Global Planning Local Planning Obstacle Avoidance ROS Navigation Stack 2 Literature Choset, Lynch,
Visual Navigation for Flying Robots. Motion Planning
 Computer Vision Group Prof. Daniel Cremers Visual Navigation for Flying Robots Motion Planning Dr. Jürgen Sturm Motivation: Flying Through Forests 3 1 2 Visual Navigation for Flying Robots 2 Motion Planning
Computer Vision Group Prof. Daniel Cremers Visual Navigation for Flying Robots Motion Planning Dr. Jürgen Sturm Motivation: Flying Through Forests 3 1 2 Visual Navigation for Flying Robots 2 Motion Planning
Robotics Tasks. CS 188: Artificial Intelligence Spring Manipulator Robots. Mobile Robots. Degrees of Freedom. Sensors and Effectors
 CS 188: Artificial Intelligence Spring 2006 Lecture 5: Robot Motion Planning 1/31/2006 Dan Klein UC Berkeley Many slides from either Stuart Russell or Andrew Moore Motion planning (today) How to move from
CS 188: Artificial Intelligence Spring 2006 Lecture 5: Robot Motion Planning 1/31/2006 Dan Klein UC Berkeley Many slides from either Stuart Russell or Andrew Moore Motion planning (today) How to move from
Trajectory Optimization
 Trajectory Optimization Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Recap We heard about RRT*, a sampling-based planning in high-dimensional cost
Trajectory Optimization Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Recap We heard about RRT*, a sampling-based planning in high-dimensional cost
Approximate path planning. Computational Geometry csci3250 Laura Toma Bowdoin College
 Approximate path planning Computational Geometry csci3250 Laura Toma Bowdoin College Outline Path planning Combinatorial Approximate Combinatorial path planning Idea: Compute free C-space combinatorially
Approximate path planning Computational Geometry csci3250 Laura Toma Bowdoin College Outline Path planning Combinatorial Approximate Combinatorial path planning Idea: Compute free C-space combinatorially
Motion Planning for Humanoid Robots
 Motion Planning for Humanoid Robots Presented by: Li Yunzhen What is Humanoid Robots & its balance constraints? Human-like Robots A configuration q is statically-stable if the projection of mass center
Motion Planning for Humanoid Robots Presented by: Li Yunzhen What is Humanoid Robots & its balance constraints? Human-like Robots A configuration q is statically-stable if the projection of mass center
Probabilistic roadmaps for efficient path planning
 Probabilistic roadmaps for efficient path planning Dan A. Alcantara March 25, 2007 1 Introduction The problem of finding a collision-free path between points in space has applications across many different
Probabilistic roadmaps for efficient path planning Dan A. Alcantara March 25, 2007 1 Introduction The problem of finding a collision-free path between points in space has applications across many different
Motion Planning. COMP3431 Robot Software Architectures
 Motion Planning COMP3431 Robot Software Architectures Motion Planning Task Planner can tell the robot discrete steps but can t say how to execute them Discrete actions must be turned into operations in
Motion Planning COMP3431 Robot Software Architectures Motion Planning Task Planner can tell the robot discrete steps but can t say how to execute them Discrete actions must be turned into operations in
II. RELATED WORK. A. Probabilistic roadmap path planner
 Gaussian PRM Samplers for Dynamic Configuration Spaces Yu-Te Lin and Shih-Chia Cheng Computer Science Department Stanford University Stanford, CA 94305, USA {yutelin, sccheng}@cs.stanford.edu SUID: 05371954,
Gaussian PRM Samplers for Dynamic Configuration Spaces Yu-Te Lin and Shih-Chia Cheng Computer Science Department Stanford University Stanford, CA 94305, USA {yutelin, sccheng}@cs.stanford.edu SUID: 05371954,
for Motion Planning RSS Lecture 10 Prof. Seth Teller
 Configuration Space for Motion Planning RSS Lecture 10 Monday, 8 March 2010 Prof. Seth Teller Siegwart & Nourbahksh S 6.2 (Thanks to Nancy Amato, Rod Brooks, Vijay Kumar, and Daniela Rus for some of the
Configuration Space for Motion Planning RSS Lecture 10 Monday, 8 March 2010 Prof. Seth Teller Siegwart & Nourbahksh S 6.2 (Thanks to Nancy Amato, Rod Brooks, Vijay Kumar, and Daniela Rus for some of the
University of Nevada, Reno. Dynamic Path Planning and Replanning for Mobile Robot Team Using RRT*
 University of Nevada, Reno Dynamic Path Planning and Replanning for Mobile Robot Team Using RRT* A thesis submitted in partial fulfillment of the requirements for the degree of Master of Science in Computer
University of Nevada, Reno Dynamic Path Planning and Replanning for Mobile Robot Team Using RRT* A thesis submitted in partial fulfillment of the requirements for the degree of Master of Science in Computer
Chapter 12. Path Planning. Beard & McLain, Small Unmanned Aircraft, Princeton University Press, 2012,
 Chapter 12 Path Planning Beard & McLain, Small Unmanned Aircraft, Princeton University Press, 212, Chapter 12: Slide 1 Control Architecture destination, obstacles map path planner waypoints status path
Chapter 12 Path Planning Beard & McLain, Small Unmanned Aircraft, Princeton University Press, 212, Chapter 12: Slide 1 Control Architecture destination, obstacles map path planner waypoints status path
crrt : Planning loosely-coupled motions for multiple mobile robots
 crrt : Planning loosely-coupled motions for multiple mobile robots Jan Rosell and Raúl Suárez Institute of Industrial and Control Engineering (IOC) Universitat Politècnica de Catalunya (UPC) Barcelona
crrt : Planning loosely-coupled motions for multiple mobile robots Jan Rosell and Raúl Suárez Institute of Industrial and Control Engineering (IOC) Universitat Politècnica de Catalunya (UPC) Barcelona
ECE276B: Planning & Learning in Robotics Lecture 5: Configuration Space
 ECE276B: Planning & Learning in Robotics Lecture 5: Configuration Space Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Tianyu Wang: tiw161@eng.ucsd.edu Yongxi Lu: yol070@eng.ucsd.edu
ECE276B: Planning & Learning in Robotics Lecture 5: Configuration Space Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Tianyu Wang: tiw161@eng.ucsd.edu Yongxi Lu: yol070@eng.ucsd.edu
Local Search Methods. CS 188: Artificial Intelligence Fall Announcements. Hill Climbing. Hill Climbing Diagram. Today
 CS 188: Artificial Intelligence Fall 2006 Lecture 5: Robot Motion Planning 9/14/2006 Local Search Methods Queue-based algorithms keep fallback options (backtracking) Local search: improve what you have
CS 188: Artificial Intelligence Fall 2006 Lecture 5: Robot Motion Planning 9/14/2006 Local Search Methods Queue-based algorithms keep fallback options (backtracking) Local search: improve what you have
Final Report: Dynamic Dubins-curve based RRT Motion Planning for Differential Constrain Robot
 Final Report: Dynamic Dubins-curve based RRT Motion Planning for Differential Constrain Robot Abstract This project develops a sample-based motion-planning algorithm for robot with differential constraints.
Final Report: Dynamic Dubins-curve based RRT Motion Planning for Differential Constrain Robot Abstract This project develops a sample-based motion-planning algorithm for robot with differential constraints.
SPATIAL GUIDANCE TO RRT PLANNER USING CELL-DECOMPOSITION ALGORITHM
 SPATIAL GUIDANCE TO RRT PLANNER USING CELL-DECOMPOSITION ALGORITHM Ahmad Abbadi, Radomil Matousek, Pavel Osmera, Lukas Knispel Brno University of Technology Institute of Automation and Computer Science
SPATIAL GUIDANCE TO RRT PLANNER USING CELL-DECOMPOSITION ALGORITHM Ahmad Abbadi, Radomil Matousek, Pavel Osmera, Lukas Knispel Brno University of Technology Institute of Automation and Computer Science
arxiv: v2 [cs.ro] 29 Jul 2016
![arxiv: v2 [cs.ro] 29 Jul 2016](/thumbs/75/72642943.jpg "arxiv: v2 [cs.ro] 29 Jul 2016") Scaling Sampling based Motion Planning to Humanoid Robots Yiming Yang, Vladimir Ivan, Wolfgang Merkt, Sethu Vijayakumar arxiv:1607.07470v2 [cs.ro] 29 Jul 2016 Abstract Planning balanced and collision free
Scaling Sampling based Motion Planning to Humanoid Robots Yiming Yang, Vladimir Ivan, Wolfgang Merkt, Sethu Vijayakumar arxiv:1607.07470v2 [cs.ro] 29 Jul 2016 Abstract Planning balanced and collision free
Robot Motion Planning
 Robot Motion Planning slides by Jan Faigl Department of Computer Science and Engineering Faculty of Electrical Engineering, Czech Technical University in Prague lecture A4M36PAH - Planning and Games Dpt.
Robot Motion Planning slides by Jan Faigl Department of Computer Science and Engineering Faculty of Electrical Engineering, Czech Technical University in Prague lecture A4M36PAH - Planning and Games Dpt.
CS Path Planning
 Why Path Planning? CS 603 - Path Planning Roderic A. Grupen 4/13/15 Robotics 1 4/13/15 Robotics 2 Why Motion Planning? Origins of Motion Planning Virtual Prototyping! Character Animation! Structural Molecular
Why Path Planning? CS 603 - Path Planning Roderic A. Grupen 4/13/15 Robotics 1 4/13/15 Robotics 2 Why Motion Planning? Origins of Motion Planning Virtual Prototyping! Character Animation! Structural Molecular
Announcements. CS 188: Artificial Intelligence Fall Robot motion planning! Today. Robotics Tasks. Mobile Robots
 CS 188: Artificial Intelligence Fall 2007 Lecture 6: Robot Motion Planning 9/13/2007 Announcements Project 1 due (yesterday)! Project 2 (Pacman with ghosts) up in a few days Reminder: you are allowed to
CS 188: Artificial Intelligence Fall 2007 Lecture 6: Robot Motion Planning 9/13/2007 Announcements Project 1 due (yesterday)! Project 2 (Pacman with ghosts) up in a few days Reminder: you are allowed to
CS 188: Artificial Intelligence Fall Announcements
 CS 188: Artificial Intelligence Fall 2007 Lecture 6: Robot Motion Planning 9/13/2007 Dan Klein UC Berkeley Many slides over the course adapted from either Stuart Russell or Andrew Moore Announcements Project
CS 188: Artificial Intelligence Fall 2007 Lecture 6: Robot Motion Planning 9/13/2007 Dan Klein UC Berkeley Many slides over the course adapted from either Stuart Russell or Andrew Moore Announcements Project
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (3 pts) How to generate Delaunay Triangulation? (3 pts) Explain the difference
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (3 pts) How to generate Delaunay Triangulation? (3 pts) Explain the difference
Robotics. Chapter 25. Chapter 25 1
 Robotics Chapter 25 Chapter 25 1 Outline Robots, Effectors, and Sensors Localization and Mapping Motion Planning Chapter 25 2 Mobile Robots Chapter 25 3 Manipulators P R R R R R Configuration of robot
Robotics Chapter 25 Chapter 25 1 Outline Robots, Effectors, and Sensors Localization and Mapping Motion Planning Chapter 25 2 Mobile Robots Chapter 25 3 Manipulators P R R R R R Configuration of robot
Uniform and Efficient Exploration of State Space using Kinodynamic Sampling-based Planners
 Uniform and Efficient Exploration of State Space using Kinodynamic Sampling-based Planners Rakhi Motwani, Mukesh Motwani, and Frederick C. Harris Jr. Abstract Sampling based algorithms such as RRTs have
Uniform and Efficient Exploration of State Space using Kinodynamic Sampling-based Planners Rakhi Motwani, Mukesh Motwani, and Frederick C. Harris Jr. Abstract Sampling based algorithms such as RRTs have
video 1 video 2 Motion Planning (It s all in the discretization) Digital Actors Basic problem Basic problem Two Possible Discretizations
 Digital Actors Basic problem Basic problem Two Possible Discretizations") Motion Planning (It s all in the discretization) Motion planning is the ability for an agent to compute its own motions in order to achieve certain goals. ll autonomous robots and digital actors should
Motion Planning (It s all in the discretization) Motion planning is the ability for an agent to compute its own motions in order to achieve certain goals. ll autonomous robots and digital actors should
Workspace-Guided Rapidly-Exploring Random Tree Method for a Robot Arm
 WorkspaceGuided RapidlyExploring Random Tree Method for a Robot Arm Jaesik Choi choi31@cs.uiuc.edu August 12, 2007 Abstract Motion planning for robotic arms is important for real, physical world applications.
WorkspaceGuided RapidlyExploring Random Tree Method for a Robot Arm Jaesik Choi choi31@cs.uiuc.edu August 12, 2007 Abstract Motion planning for robotic arms is important for real, physical world applications.
Planning in Mobile Robotics
 Planning in Mobile Robotics Part I. Miroslav Kulich Intelligent and Mobile Robotics Group Gerstner Laboratory for Intelligent Decision Making and Control Czech Technical University in Prague Tuesday 26/07/2011
Planning in Mobile Robotics Part I. Miroslav Kulich Intelligent and Mobile Robotics Group Gerstner Laboratory for Intelligent Decision Making and Control Czech Technical University in Prague Tuesday 26/07/2011
PATH PLANNING FOR ULTRALIGHTS UNDER EMERGENCY CONDITIONS
 PATH PLANNING FOR ULTRALIGHTS UNDER EMERGENCY CONDITIONS Tomáš Levora, Ondřej Bruna and Pavel Pačes Czech Technical University in Prague Keywords: Emergency Landing, Roadmap Motion Planning, Safe Landing
PATH PLANNING FOR ULTRALIGHTS UNDER EMERGENCY CONDITIONS Tomáš Levora, Ondřej Bruna and Pavel Pačes Czech Technical University in Prague Keywords: Emergency Landing, Roadmap Motion Planning, Safe Landing
Configuration Space. Ioannis Rekleitis
 Configuration Space Ioannis Rekleitis Configuration Space Configuration Space Definition A robot configuration is a specification of the positions of all robot points relative to a fixed coordinate system
Configuration Space Ioannis Rekleitis Configuration Space Configuration Space Definition A robot configuration is a specification of the positions of all robot points relative to a fixed coordinate system
Introduction to Robotics
 Jianwei Zhang zhang@informatik.uni-hamburg.de Universität Hamburg Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 05. July 2013 J. Zhang 1 Task-level
Jianwei Zhang zhang@informatik.uni-hamburg.de Universität Hamburg Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 05. July 2013 J. Zhang 1 Task-level
vizmo++: a Visualization, Authoring, and Educational Tool for Motion Planning
 vizmo++: a Visualization, Authoring, and Educational Tool for Motion Planning Aimée Vargas E. Jyh-Ming Lien Nancy M. Amato. aimee@cs.tamu.edu neilien@cs.tamu.edu amato@cs.tamu.edu Technical Report TR05-011
vizmo++: a Visualization, Authoring, and Educational Tool for Motion Planning Aimée Vargas E. Jyh-Ming Lien Nancy M. Amato. aimee@cs.tamu.edu neilien@cs.tamu.edu amato@cs.tamu.edu Technical Report TR05-011
EG-RRT: Environment-Guided Random Trees for Kinodynamic Motion Planning with Uncertainty and Obstacles
 EG-RRT: Environment-Guided Random Trees for Kinodynamic Motion Planning with Uncertainty and Obstacles Léonard Jaillet, Judy Hoffman, Jur van den Berg, Pieter Abbeel, Josep M. Porta, Ken Goldberg Abstract
EG-RRT: Environment-Guided Random Trees for Kinodynamic Motion Planning with Uncertainty and Obstacles Léonard Jaillet, Judy Hoffman, Jur van den Berg, Pieter Abbeel, Josep M. Porta, Ken Goldberg Abstract
Human-Oriented Robotics. Robot Motion Planning. Kai Arras Social Robotics Lab, University of Freiburg
 Robot Motion Planning Kai Arras, University of Freiburg 1 Contents Introduction Configuration space Combinatorial planning Sampling-based planning Potential fields methods A, Any-Angle A, D/D Lite Dynamic
Robot Motion Planning Kai Arras, University of Freiburg 1 Contents Introduction Configuration space Combinatorial planning Sampling-based planning Potential fields methods A, Any-Angle A, D/D Lite Dynamic
Robot Motion Control Matteo Matteucci
 Robot Motion Control Open loop control A mobile robot is meant to move from one place to another Pre-compute a smooth trajectory based on motion segments (e.g., line and circle segments) from start to
Robot Motion Control Open loop control A mobile robot is meant to move from one place to another Pre-compute a smooth trajectory based on motion segments (e.g., line and circle segments) from start to
Can work in a group of at most 3 students.! Can work individually! If you work in a group of 2 or 3 students,!
 Assignment 1 is out! Due: 26 Aug 23:59! Submit in turnitin! Code + report! Can work in a group of at most 3 students.! Can work individually! If you work in a group of 2 or 3 students,! Each member must
Assignment 1 is out! Due: 26 Aug 23:59! Submit in turnitin! Code + report! Can work in a group of at most 3 students.! Can work individually! If you work in a group of 2 or 3 students,! Each member must
Shorter, Smaller, Tighter Old and New Challenges
 How can Computational Geometry help Robotics and Automation: Shorter, Smaller, Tighter Old and New Challenges Dan Halperin School of Computer Science Tel Aviv University Algorithms in the Field/CG, CG
How can Computational Geometry help Robotics and Automation: Shorter, Smaller, Tighter Old and New Challenges Dan Halperin School of Computer Science Tel Aviv University Algorithms in the Field/CG, CG
Motion Planning with Dynamics, Physics based Simulations, and Linear Temporal Objectives. Erion Plaku
 Motion Planning with Dynamics, Physics based Simulations, and Linear Temporal Objectives Erion Plaku Laboratory for Computational Sensing and Robotics Johns Hopkins University Frontiers of Planning The
Motion Planning with Dynamics, Physics based Simulations, and Linear Temporal Objectives Erion Plaku Laboratory for Computational Sensing and Robotics Johns Hopkins University Frontiers of Planning The
CHAPTER SIX. the RRM creates small covering roadmaps for all tested environments.
 CHAPTER SIX CREATING SMALL ROADMAPS Many algorithms have been proposed that create a roadmap from which a path for a moving object can be extracted. These algorithms generally do not give guarantees on
CHAPTER SIX CREATING SMALL ROADMAPS Many algorithms have been proposed that create a roadmap from which a path for a moving object can be extracted. These algorithms generally do not give guarantees on
Evaluation of the K-closest Neighbor Selection Strategy for PRM Construction
 Evaluation of the K-closest Neighbor Selection Strategy for PRM Construction Troy McMahon, Sam Jacobs, Bryan Boyd, Lydia Tapia, Nancy M. Amato Parasol Laboratory, Dept. of Computer Science and Engineering,
Evaluation of the K-closest Neighbor Selection Strategy for PRM Construction Troy McMahon, Sam Jacobs, Bryan Boyd, Lydia Tapia, Nancy M. Amato Parasol Laboratory, Dept. of Computer Science and Engineering,
15-494/694: Cognitive Robotics
 15-494/694: Cognitive Robotics Dave Touretzky Lecture 9: Path Planning with Rapidly-exploring Random Trees Navigating with the Pilot Image from http://www.futuristgerd.com/2015/09/10 Outline How is path
15-494/694: Cognitive Robotics Dave Touretzky Lecture 9: Path Planning with Rapidly-exploring Random Trees Navigating with the Pilot Image from http://www.futuristgerd.com/2015/09/10 Outline How is path
Efficient and Smooth RRT Motion Planning Using a Novel Extend Function for Wheeled Mobile Robots
 Efficient and Smooth RRT Motion Planning Using a Novel Extend Function for Wheeled Mobile Robots Luigi Palmieri and Kai O. Arras Social Robotics Laboratory Dept. of Computer Science University of Freiburg
Efficient and Smooth RRT Motion Planning Using a Novel Extend Function for Wheeled Mobile Robots Luigi Palmieri and Kai O. Arras Social Robotics Laboratory Dept. of Computer Science University of Freiburg
PATH PLANNING IMPLEMENTATION USING MATLAB
 PATH PLANNING IMPLEMENTATION USING MATLAB A. Abbadi, R. Matousek Brno University of Technology, Institute of Automation and Computer Science Technicka 2896/2, 66 69 Brno, Czech Republic Ahmad.Abbadi@mail.com,
PATH PLANNING IMPLEMENTATION USING MATLAB A. Abbadi, R. Matousek Brno University of Technology, Institute of Automation and Computer Science Technicka 2896/2, 66 69 Brno, Czech Republic Ahmad.Abbadi@mail.com,
Optimal Kinodynamic Motion Planning using Incremental Sampling-based Methods
 Optimal Kinodynamic Motion Planning using Incremental Sampling-based Methods The MIT Faculty has made this article openly available. Please share how this access benefits you. Your story matters. Citation
Optimal Kinodynamic Motion Planning using Incremental Sampling-based Methods The MIT Faculty has made this article openly available. Please share how this access benefits you. Your story matters. Citation
Scan Matching. Pieter Abbeel UC Berkeley EECS. Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics
 Scan Matching Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Scan Matching Overview Problem statement: Given a scan and a map, or a scan and a scan,
Scan Matching Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Scan Matching Overview Problem statement: Given a scan and a map, or a scan and a scan,
Approaches for Heuristically Biasing RRT Growth
 Approaches for Heuristically Biasing RRT Growth Chris Urmson & Reid Simmons The Robotics Institute, Carnegie Mellon University, Pittsburgh, USA {curmson, reids}@ri.cmu.edu Abstract This paper presents
Approaches for Heuristically Biasing RRT Growth Chris Urmson & Reid Simmons The Robotics Institute, Carnegie Mellon University, Pittsburgh, USA {curmson, reids}@ri.cmu.edu Abstract This paper presents
Path Planning in Repetitive Environments
 MMAR 2006 12th IEEE International Conference on Methods and Models in Automation and Robotics 28-31 August 2006 Międzyzdroje, Poland Path Planning in Repetitive Environments Jur van den Berg Mark Overmars
MMAR 2006 12th IEEE International Conference on Methods and Models in Automation and Robotics 28-31 August 2006 Międzyzdroje, Poland Path Planning in Repetitive Environments Jur van den Berg Mark Overmars
Motion Planning, Part III Graph Search, Part I. Howie Choset
 Motion Planning, Part III Graph Search, Part I Howie Choset Happy President s Day The Configuration Space What it is A set of reachable areas constructed from knowledge of both the robot and the world
Motion Planning, Part III Graph Search, Part I Howie Choset Happy President s Day The Configuration Space What it is A set of reachable areas constructed from knowledge of both the robot and the world
Collided Path Replanning in Dynamic Environments Using RRT and Cell Decomposition Algorithms
 Collided Path Replanning in Dynamic Environments Using RRT and Cell Decomposition Algorithms Ahmad Abbadi ( ) and Vaclav Prenosil Department of Information Technologies, Faculty of Informatics, Masaryk
Collided Path Replanning in Dynamic Environments Using RRT and Cell Decomposition Algorithms Ahmad Abbadi ( ) and Vaclav Prenosil Department of Information Technologies, Faculty of Informatics, Masaryk
Navigation and Metric Path Planning
 Navigation and Metric Path Planning October 4, 2011 Minerva tour guide robot (CMU): Gave tours in Smithsonian s National Museum of History Example of Minerva s occupancy map used for navigation Objectives
Navigation and Metric Path Planning October 4, 2011 Minerva tour guide robot (CMU): Gave tours in Smithsonian s National Museum of History Example of Minerva s occupancy map used for navigation Objectives
INCREASING THE CONNECTIVITY OF PROBABILISTIC ROADMAPS VIA GENETIC POST-PROCESSING. Giuseppe Oriolo Stefano Panzieri Andrea Turli
 INCREASING THE CONNECTIVITY OF PROBABILISTIC ROADMAPS VIA GENETIC POST-PROCESSING Giuseppe Oriolo Stefano Panzieri Andrea Turli Dip. di Informatica e Sistemistica, Università di Roma La Sapienza, Via Eudossiana
INCREASING THE CONNECTIVITY OF PROBABILISTIC ROADMAPS VIA GENETIC POST-PROCESSING Giuseppe Oriolo Stefano Panzieri Andrea Turli Dip. di Informatica e Sistemistica, Università di Roma La Sapienza, Via Eudossiana
Vehicle Motion Planning with Time-Varying Constraints
 Vehicle Motion Planning with Time-Varying Constraints W. Todd Cerven 1, Francesco Bullo 2, and Victoria L. Coverstone 3 University of Illinois at Urbana-Champaign Introduction With the growing emphasis
Vehicle Motion Planning with Time-Varying Constraints W. Todd Cerven 1, Francesco Bullo 2, and Victoria L. Coverstone 3 University of Illinois at Urbana-Champaign Introduction With the growing emphasis
Probabilistic Roadmap Planner with Adaptive Sampling Based on Clustering
 Proceedings of the 2nd International Conference of Control, Dynamic Systems, and Robotics Ottawa, Ontario, Canada, May 7-8 2015 Paper No. 173 Probabilistic Roadmap Planner with Adaptive Sampling Based
Proceedings of the 2nd International Conference of Control, Dynamic Systems, and Robotics Ottawa, Ontario, Canada, May 7-8 2015 Paper No. 173 Probabilistic Roadmap Planner with Adaptive Sampling Based
Feedback Motion Planning via Non-holonomic RRT for Mobile Robots
 Feedback Motion Planning via Non-holonomic RRT for Mobile Robots Jong Jin Park 1 and Benjamin Kuipers 2 Abstract Here we present a non-holonomic distance function for unicycle-type vehicles, and use this
Feedback Motion Planning via Non-holonomic RRT for Mobile Robots Jong Jin Park 1 and Benjamin Kuipers 2 Abstract Here we present a non-holonomic distance function for unicycle-type vehicles, and use this
Experience Guided Mobile Manipulation Planning
 Experience Guided Mobile Manipulation Planning Tekin Meriçli 1 and Manuela Veloso 2 and H. Levent Akın 1 {tekin.mericli,akin}@boun.edu.tr,veloso@cmu.edu 1 Department of Computer Engineering, Boğaziçi University,
Experience Guided Mobile Manipulation Planning Tekin Meriçli 1 and Manuela Veloso 2 and H. Levent Akın 1 {tekin.mericli,akin}@boun.edu.tr,veloso@cmu.edu 1 Department of Computer Engineering, Boğaziçi University,
Motion Planning For Steerable Needles in 3D Environments with Obstacles Using Rapidly-Exploring Random Trees and Backchaining
 Motion Planning For Steerable Needles in 3D Environments with Obstacles Using Rapidly-Exploring Random Trees and Backchaining Jijie Xu 1, Vincent Duindam, Ron Alterovitz 1,3, and Ken Goldberg 1, 1. Department
Motion Planning For Steerable Needles in 3D Environments with Obstacles Using Rapidly-Exploring Random Trees and Backchaining Jijie Xu 1, Vincent Duindam, Ron Alterovitz 1,3, and Ken Goldberg 1, 1. Department
Massively parallelizing the RRT and the RRT*
 Massively parallelizing the RRT and the RRT* The MIT Faculty has made this article openly available. Please share how this access benefits you. Your story matters. Citation As Published Publisher Bialkowski,
Massively parallelizing the RRT and the RRT* The MIT Faculty has made this article openly available. Please share how this access benefits you. Your story matters. Citation As Published Publisher Bialkowski,
Motion Planning. Jana Kosecka Department of Computer Science
 Motion Planning Jana Kosecka Department of Computer Science Discrete planning, graph search, shortest path, A* methods Road map methods Configuration space Slides thanks to http://cs.cmu.edu/~motionplanning,
Motion Planning Jana Kosecka Department of Computer Science Discrete planning, graph search, shortest path, A* methods Road map methods Configuration space Slides thanks to http://cs.cmu.edu/~motionplanning,
Reachability-guided sampling for planning under differential constraints
 Reachability-guided sampling for planning under differential constraints The MIT Faculty has made this article openly available. Please share how this access benefits you. Your story matters. Citation
Reachability-guided sampling for planning under differential constraints The MIT Faculty has made this article openly available. Please share how this access benefits you. Your story matters. Citation
Path Planning in Dimensions Using a Task-Space Voronoi Bias
 Path Planning in 1000+ Dimensions Using a Task-Space Voronoi Bias Alexander Shkolnik and Russ Tedrake Abstract The reduction of the kinematics and/or dynamics of a high-dof robotic manipulator to a low-dimension
Path Planning in 1000+ Dimensions Using a Task-Space Voronoi Bias Alexander Shkolnik and Russ Tedrake Abstract The reduction of the kinematics and/or dynamics of a high-dof robotic manipulator to a low-dimension
Motion planning is a branch of computer science concentrating upon the computation of
 Motion Planning for Skateboard-like Robots in Dynamic Environments by Salik Syed Introduction Motion planning is a branch of computer science concentrating upon the computation of paths for robots or digital
Motion Planning for Skateboard-like Robots in Dynamic Environments by Salik Syed Introduction Motion planning is a branch of computer science concentrating upon the computation of paths for robots or digital
Improving Roadmap Quality through Connected Component Expansion
 Improving Roadmap Quality through Connected Component Expansion Juan Burgos, Jory Denny, and Nancy M. Amato Abstract Motion planning is the problem of computing valid paths through an environment. However,
Improving Roadmap Quality through Connected Component Expansion Juan Burgos, Jory Denny, and Nancy M. Amato Abstract Motion planning is the problem of computing valid paths through an environment. However,
Dynamic Path Planning and Replanning for Mobile Robots using RRT*
 Dynamic Path Planning and Replanning for Mobile Robots using RRT* Devin Connell Advanced Robotics and Automation Lab Department of Computer Science and Engineering University of Nevada, Reno NV, 89519
Dynamic Path Planning and Replanning for Mobile Robots using RRT* Devin Connell Advanced Robotics and Automation Lab Department of Computer Science and Engineering University of Nevada, Reno NV, 89519
arxiv: v1 [cs.ro] 8 Oct 2014
![arxiv: v1 [cs.ro] 8 Oct 2014](/thumbs/78/78222192.jpg "arxiv: v1 [cs.ro] 8 Oct 2014") Experience-Based Planning with Sparse Roadmap Spanners David Coleman 1, Ioan A. Şucan 2, Mark Moll 3, Kei Okada 4, and Nikolaus Correll 1 arxiv:1410.1950v1 [cs.ro] 8 Oct 2014 Abstract We present an experienced-based
Experience-Based Planning with Sparse Roadmap Spanners David Coleman 1, Ioan A. Şucan 2, Mark Moll 3, Kei Okada 4, and Nikolaus Correll 1 arxiv:1410.1950v1 [cs.ro] 8 Oct 2014 Abstract We present an experienced-based
Advanced Robotics Path Planning & Navigation
 Advanced Robotics Path Planning & Navigation 1 Agenda Motivation Basic Definitions Configuration Space Global Planning Local Planning Obstacle Avoidance ROS Navigation Stack 2 Literature Choset, Lynch,
Advanced Robotics Path Planning & Navigation 1 Agenda Motivation Basic Definitions Configuration Space Global Planning Local Planning Obstacle Avoidance ROS Navigation Stack 2 Literature Choset, Lynch,
Real-Time Randomized Path Planning for Robot Navigation
 Real-Time Randomized Path Planning for Robot Navigation James Bruce (jbruce@cs.cmu.edu) Manuela Veloso (mmv@cs.cmu.edu) Computer Science Department Carnegie Mellon University 5000 Forbes Avenue Pittsburgh
Real-Time Randomized Path Planning for Robot Navigation James Bruce (jbruce@cs.cmu.edu) Manuela Veloso (mmv@cs.cmu.edu) Computer Science Department Carnegie Mellon University 5000 Forbes Avenue Pittsburgh
Balancing Exploration and Exploitation in Motion Planning
 2008 IEEE International Conference on Robotics and Automation Pasadena, CA, USA, May 19-23, 2008 Balancing Exploration and Exploitation in Motion Planning Markus Rickert Oliver Brock Alois Knoll Robotics
2008 IEEE International Conference on Robotics and Automation Pasadena, CA, USA, May 19-23, 2008 Balancing Exploration and Exploitation in Motion Planning Markus Rickert Oliver Brock Alois Knoll Robotics
Dynamic Path Planning and Replanning for Mobile Robots using RRT*
 2017 IEEE International Conference on Systems, Man, and Cybernetics (SMC) Banff Center, Banff, Canada, October 5-8, 2017 Dynamic Path Planning and Replanning for Mobile Robots using RRT* Devin Connell,
2017 IEEE International Conference on Systems, Man, and Cybernetics (SMC) Banff Center, Banff, Canada, October 5-8, 2017 Dynamic Path Planning and Replanning for Mobile Robots using RRT* Devin Connell,
Lecture 3: Motion Planning 2
 CS 294-115 Algorithmic Human-Robot Interaction Fall 2017 Lecture 3: Motion Planning 2 Scribes: David Chan and Liting Sun - Adapted from F2016 Notes by Molly Nicholas and Chelsea Zhang 3.1 Previously Recall
CS 294-115 Algorithmic Human-Robot Interaction Fall 2017 Lecture 3: Motion Planning 2 Scribes: David Chan and Liting Sun - Adapted from F2016 Notes by Molly Nicholas and Chelsea Zhang 3.1 Previously Recall
Figure 1: A typical industrial scene with over 4000 obstacles. not cause collisions) into a number of cells. Motion is than planned through these cell
 into a number of cells. Motion is than planned through these cell") Recent Developments in Motion Planning Λ Mark H. Overmars Institute of Information and Computing Sciences, Utrecht University, P.O. Box 80.089, 3508 TB Utrecht, the Netherlands. Email: markov@cs.uu.nl.
Recent Developments in Motion Planning Λ Mark H. Overmars Institute of Information and Computing Sciences, Utrecht University, P.O. Box 80.089, 3508 TB Utrecht, the Netherlands. Email: markov@cs.uu.nl.
Experience-Based Planning with Sparse Roadmap Spanners
 To appear in the Proceedings of the IEEE International Conference on Robotics and Automation, 2015. Experience-Based Planning with Sparse Roadmap Spanners David Coleman 1, Ioan A. Şucan 2, Mark Moll 3,
To appear in the Proceedings of the IEEE International Conference on Robotics and Automation, 2015. Experience-Based Planning with Sparse Roadmap Spanners David Coleman 1, Ioan A. Şucan 2, Mark Moll 3,
Motion Planning For Steerable Needles in 3D Environments with Obstacles Using Rapidly-Exploring Random Trees and Backchaining
 Motion Planning For Steerable Needles in 3D Environments with Obstacles Using Rapidly-Exploring Random Trees and Backchaining Jijie Xu, Vincent Duindam, Ron Alterovitz, and Ken Goldberg Abstract Steerable
Motion Planning For Steerable Needles in 3D Environments with Obstacles Using Rapidly-Exploring Random Trees and Backchaining Jijie Xu, Vincent Duindam, Ron Alterovitz, and Ken Goldberg Abstract Steerable
Fast Anytime Motion Planning in Point Clouds by Interleaving Sampling and Interior Point Optimization
 Fast Anytime Motion Planning in Point Clouds by Interleaving Sampling and Interior Point Optimization Alan Kuntz, Chris Bowen, and Ron Alterovitz University of North Carolina at Chapel Hill Chapel Hill,
Fast Anytime Motion Planning in Point Clouds by Interleaving Sampling and Interior Point Optimization Alan Kuntz, Chris Bowen, and Ron Alterovitz University of North Carolina at Chapel Hill Chapel Hill,
Guiding Sampling-Based Tree Search for Motion Planning with Dynamics via Probabilistic Roadmap Abstractions
 Guiding Sampling-Based Tree Search for Motion Planning with Dynamics via Probabilistic Roadmap Abstractions Duong Le and Erion Plaku Abstract This paper focuses on motion-planning problems for high-dimensional
Guiding Sampling-Based Tree Search for Motion Planning with Dynamics via Probabilistic Roadmap Abstractions Duong Le and Erion Plaku Abstract This paper focuses on motion-planning problems for high-dimensional
Introduction to Intelligent System ( , Fall 2017) Instruction for Assignment 2 for Term Project. Rapidly-exploring Random Tree and Path Planning
 Instruction for Assignment 2 for Term Project. Rapidly-exploring Random Tree and Path Planning") Instruction for Assignment 2 for Term Project Rapidly-exploring Random Tree and Path Planning Introduction The objective of this semester s term project is to implement a path planning algorithm for a
Instruction for Assignment 2 for Term Project Rapidly-exploring Random Tree and Path Planning Introduction The objective of this semester s term project is to implement a path planning algorithm for a
Learning Humanoid Reaching Tasks in Dynamic Environments
 Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems San Diego, CA, USA, Oct 29 - Nov 2, 2007 TuD3.5 Learning Humanoid Reaching Tasks in Dynamic Environments Xiaoxi
Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems San Diego, CA, USA, Oct 29 - Nov 2, 2007 TuD3.5 Learning Humanoid Reaching Tasks in Dynamic Environments Xiaoxi