Integrating Dynamics into Motion Planning for Humanoid Robots
|
|
|
- Terence Logan
- 5 years ago
- Views:
Transcription

 A local method plans a C 1 path while avoiding collisions between non-strictly convex objects.")
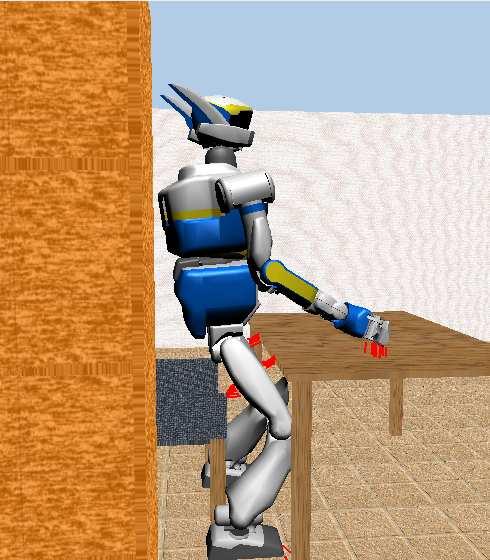
1 Integrating Dynamics into Motion Planning for Humanoid Robots Fumio Kanehiro, Wael Suleiman, Florent Lamiraux, Eiichi Yoshida and Jean-Paul Laumond Abstract This paper proposes an whole body motion planning method for humanoid robots in which dynamics is integrated. The method consists of two stages. A collision-free and statically stable path is planned in the first stage and it is transformed into a dynamically stable trajectory in the second stage. Contributions of the method is summarized as follows. (1) A local method plans a C 1 path while avoiding collisions between non-strictly convex objects. (2) The second stage gives the minimum time trajectory by time parameterization under dynamic balance constraints. (3) Any path reshaping for recovering collision-freeness is not required since the second stage doesn t change shape of the path. Effectiveness of the method is examined by applying it to scenarios of a humanoid robot HRP-2. I. INTRODUCTION An whole body motion planning of a humanoid robot is a challenging problem mainly from the following reasons. (1) Most of humanoid robots have more than 30 degrees of freedom. (2) The whole body motion must satisfy constraints, collision-freeness, physical capabilities and dynamic stability at the same time. Because of these reasons, it is difficult to solve the problem within reasonable time by applying existing motion planning techniques in straightforward way. Several challenges have already been done on this topic. [1] proposes a whole-body control framework which provides joint torques by projecting operational tasks into the constraint null-space. We prefer to generate motions in the joint velocity space. Because most of existing humanoid robots are position controlled and it s difficult to control them using joint torques from a practical point of view. [2] proposes a motion planning method under obstacles and dynamic balance constraints. It consists of two stages. In the first stage, it finds a collision-free path by exploring a set of pre-computed statically stable postures. In the second stage the path is transformed into a dynamically stable trajectory by applying a dynamics filter. Since the dynamics filter modifies shape of the path, it possibly cause collisions. Therefore, the trajectory is confirmed to be collision-free and its duration is extended if collisions are found. [3] also proposes a two stages approach for passing under obstacles. It plans a statically stable path in the first stage like [2] but the path is transformed into a dynamically stable trajectory without changing shape of the path. The authors are with IS/AIST-ST2I/CNRS Joint Japanese-French Robotics Laboratory(JRL) F. Kanehiro and E. Yoshida are with Intelligent Systems Research Institute, National Institute of Advanced Industrial Science and Technology(AIST), Tsukuba Central 2, Umezono, Tsukuba, Ibaraki, Japan {f-kanehiro, e.yoshida}@aist.go.jp W. Suleiman, F. Lamiraux and J.-P. Laumond are with LAAS-CNRS, university of Toulouse, 7 Avenue du Colonel Roche, Toulouse, France {suleiman, florent, jpl}@laas.fr Fig. 1. Whole body reaching with avoiding collisions and keeping stability [4], [5] and [6] propose methods that integrate motion planning techniques and a bipedal walking pattern generator. The method of [4] is applied to a bar carrying task. It plans a collision-free path at first by approximating a robot by a parallelepiped and then a trajectory is generated by the walking pattern generator. If collisions are caused by dynamic effects, the initial path is reshaped. Methods in [5] and [6] are applied to passing motion under obstacles. [5] regards a robot as a height adjustable box and plans its position, orientation and height. Then the planned path is transformed into a trajectory by a walking pattern generator. [6] generates a walking pattern at first with monitoring collisions and then colliding parts are modified while keeping the horizontal position of the center of mass. Our strategy is also one of two stages strategies. A collision-free and statically stable path is planned in the first stage and it is transformed into a dynamically stable trajectory in the second stage. Contributions of the method are summarized as follows. (1) A local method plans a C 1 path while avoiding collisions between non-strictly convex objects. (2) The second stage gives the minimum time trajectory by time parameterization under dynamic balance constraints. (3) Any path reshaping for recovering collisionfreeness is not required since the second stage doesn t change shape of the path. This work is a continuation of [7] and integrates dynamics into a local method in [7]. The paper is organized as follows. In section II, an outline of our method is introduced. In section III, a local method to get a collision-free and statically stable path is explained. In section IV, a timing planning method to transform the path into a minimum time and dynamically stable trajectory is presented. In section V, the effectiveness of the proposed method is confirmed by applying it to two scenarios for a
2 humanoid robot HRP-2[8]. In section VI, we summarize and conclude the paper. II. TWO STAGES APPROACH An whole body motion of a humanoid robot must satisfy the following constraints to be feasible for the real robot. 1) There is no self-collision and collision with the environment. 2) All joint angles stay within joint movable ranges. 3) All joint velocities don t exceed their limits. 4) ZMP stays inside of the support polygon. We propose a method which consists of two stages. The first stage plans a collision-free path and it is transformed into a dynamically stable trajectory in the second stage like [2]. Here, path is a series of configurations and trajectory associates time and these configurations. In that sense, path is a projected image of trajectory onto the configuration space. If the transformation of the second stage modifies shape of the path, its collision-freeness might be broken. In the case, we need to go back to the first stage and iterate these two stages until a collision-free and dynamically stable trajectory is obtained. In order to prevent this iteration, we plan a statically stable path in the first stage and transform it into a dynamically stable trajectory without changing shape of the path by timing planning. By using a statically stable path as an input of timing planning, the second stage can always obtain a dynamically stable trajectory by slowing down[9]. The timing planning problem is an old problem in robotic research. In the research works on manipulators, the main objective was to reduce the execution time of the tasks, thereby increasing the productivity. Most of these approaches is based on time-optimal control theory (see [10] for an overview). In the framework of mobile robots, the timing planning problem arises also to transform a feasible path to a feasible trajectory [11]. The main objective, in this case, is to reach the goal position as fast as possible. However, in our case the application of time optimal control theory is a difficult task. This is because not only the dynamic equation of the humanoid robot motion is very complex, but also applying time optimal control theory requires the calculation of the derivative of the configuration space vector of humanoid robot with respect to the parameterized path. Although such a calculation can be evaluated from differential geometry, it is a very difficult task in the case of high dimensional degree of freedoms and branched kinematic chains, which is the case of humanoid robot. For that, we propose to solve the timing planning problem numerically using finite difference approach as it will be explained later in the sequel. In order to get a short trajectory by timing planning, the first stage plans a C 1 path. If the path is not C 1 at some points, the robot must stop at those points. Because if the robot doesn t stop, discontinuous velocities and infinite joint accelerations are applied to joints and it is impossible to keep dynamic stability. Therefore a C 1 path is preferable to prevent such a stop-and-go trajectory is generated. Fig. 2. Collision avoidance: Faverjon and Tournassoud s method Requirements for a path planned in the first stage is summarized as follows. 1) There is no self-collision and collision with the environment. 2) All joint angles stay within joint movable ranges. 3) The path is composed of statically stable postures. 4) The path is C 1. These constraints are not broken by timing planning in the second stage. The second stage transforms the path under the following constraints. 5) All joint velocities don t exceed their limits. 6) ZMP stays inside of the support polygon. III. COLLISION-FREE AND STATICALLY STABLE PATH A. Local Based Path Planning Method In order to plan a collision-free and statically stable path, we use a local based path planning method proposed by Faverjon and Tournassoud[12]. The method produces the velocity of the robot under constraints. In the method, a nonconstrained initial velocity to achieve a task is computed and this initial guess is projected over the subspace of velocities satisfying linear equality and inequality constraints. Let q denote the configuration and q the velocity of the robot. The projection is formulated as an optimization problem described as follows. min q J τ (q) q τ 2 subject to A q + b = 0, C q + d 0. where J τ (q) and τ denote Jacobian matrix of the task and the desired task velocity respectively. The path under constraints is generated by solving this problem repeatedly until a configuration which satisfies τ(q) = 0 is obtained. B. Constraints 1) Collision Avoidance: A linear inequality constraint to avoid collision is also proposed in [12]. It is called velocity damper. Let d be the distance between points, p 1 and p 2 on two objects, O 1 and O 2 (Fig. 2). When d is smaller than a threshold called influence distance and denoted by d i, velocity damper is activated for velocity of d: (1) d ξ d d s d i d s (2)
 where n is the unit vector (p 1 p 2 )/d and notation (u v) refers to the inner product of vectors u and v.")
3 where ξ is a positive coefficient for adjusting convergence speed, d s (< d i ) is a positive value called security distance. d is constrained not to be smaller than d s. d is computed by the following equation. d = (ṗ 1 ṗ 2 n) where n is the unit vector (p 1 p 2 )/d and notation (u v) refers to the inner product of vectors u and v. The region where d is smaller than influence distance is called influence zone. velocity damper expresses that d must not decrease too fast when it is smaller than d i. The velocity of p i (i = 1,2) can be expressed as: Fig. 3. Constraints generated between an edge and a triangle p i = J(q,p i ) q where J(q,p i ) is a Jacobian matrix of O i at p i. Inequality (2) thus becomes a linear inequality constraint over the robot velocity q: ( q J(q,p 1 ) T n J(q,p 2 ) T n) ξ d d s d i d s (3) If O 1 and O 2 are strictly convex objects, p 1 and p 2 are the closest points on them. In order to use non-strictly convex polyhedra as geometric models of the robot and the environment, several pairs of points must be selected to get continuous velocities as solutions of Problem (1). The interaction between polyhedra is decomposed into a set of interactions between faces. Polygonal faces are assumed to be decomposed into triangles 1. The interaction between triangles is managed by the combinatorics between edges of the triangle and Voronoi regions of the other triangle. Let us recall the definition of Voronoi region. Definition: Voronoi region VR(X) for feature X. A Voronoi region associated with a feature X of a triangle is a set of points that are closer to X than any other feature. Pairs of points are selected as follows. Case1 : The edge is in VR(F) Two pairs, (V i, V i )(i = 1,2) are constrained, where V i(i = 1,2) are end points of the edge. (a,b) denotes a pair of points, a and b and V i (i = 1,2) denotes a projection of V i onto F along its normal vector. Case2 : The edge is in VR(E) Three pairs, (V i, V i )(i = 1,2,3) are constrained, where V i (i = 1,2) is a projected point of the end point V i onto E. V 3 and V 3 are the closest points between the edge and E. Case3 : The edge is in VR(V) Three pairs, (V i, V)(i = 1,2,3) are constrained, where V i (i = 1,2) are end points of the edge. V 3 is the closest point between the edge and V. For more details on continuous constraints generation between polyhedra, please refer [7]. 2) Joint Angle Limits: Joint angles can stay within joint movable ranges by constraining those velocities using velocity damper. velocity damper for joint angles limits are defined as follows. 1 In the following, features of a triangle are the triangular (open)face, the three edges and the three vertices. qmax i (q i ) q i qmin i (q i ), for i {1,...,n}. (4) ξ (q+ i q i ) q s if q + i q qmax i (q i ) = i q i, q i q s otherwise q + i ξ (q i q i ) q s if q qmin i (q i ) = i q i q i, q i q s otherwise q i where q + i and q i are physical upper bound and lower bound of joint angle of i th joint respectively. 3) Horizontal Position of the Center of Mass: The robot is statically stable when a projected point of the center of mass(com for short) is in the support polygon. CoM is allowed to move as far as the projected point is in the polygon. This can be expressed as a set of inequality constraints. But in order to maximize margin for dynamic effect and minimize the duration of trajectory in the second stage, we constrain the horizontal position of CoM on the line which is orthogonal to the ground. This constraint is expressed as an equality constraint as follows. (5) (6) J c q = ṗ c (7) where J c and ṗ c are Jacobian matrix of CoM and a desired velocity of CoM respectively. ṗ c is used to switch supporting legs. IV. DYNAMICALLY STABLE TRAJECTORY A. Dynamic Stability and ZMP Dynamically stable trajectory is a trajectory for which the ZMP trajectory is always inside of the polygon of support (i,e, the convex hull of all points of contact between the support foot (feet) and the ground). Theoretically, any statically stable trajectory can be transformed into a dynamically stable one by slowing down the humanoid robot s motion. However, our objective is to find a minimum time and dynamically stable trajectory from a statically stable one. In order to obtain a motion within the humanoid robot capacities, the joint velocity limits of the humanoid robot should be taken into account.
4 Finally, the timing planning problem can be seen as an optimization problem under inequality constraints. Let the ZMP on the horizontal ground be given by the following vector p = [ p x p y ] T (8) To compute p, one can use the following formula p = N n τ (f n) where N is a constant matrix [ ] N = (9) (10) the vector n is the normal vector on the horizontal ground (n = z). The operator refers to the cross product. Recall that (f n) is the inner product of the vectors f and n. The vector f is the result of the gravity and inertia forces n f = Mg m i c i (11) where g denotes the acceleration of the gravity (g = gz), and M is the total mass of the humanoid robot. The quantities m i, c i are the mass of the i th link and the acceleration of its center of mass c i respectively. Finally, τ denotes the moment of the force f about the origin of the fixed world frame p O. The expression of τ is the following n τ = (m i c i (g c i ) L ) ci (12) where L ci is the angular momentum at the point c i L ci = R i (I ci ω i (I ci ω i ) ω i ) (13) R i is the rotation matrix associated to the i th link. I ci, ω i and ω i are its inertia matrix, angular velocity and angular acceleration respectively. B. Timing planning formulation Generally speaking, the timing planning problem of a function f (x t ), where t denotes time, consists into finding a real function S t in such a way f (x St ) verifies some temporal constraints, e.g, h(s t ) f (x St ) l(s t ) (14) Definition: The spatial velocity vector V t R 6 is defined as follows V t = v t ω t = dx t dt dθ t dt (15) Definition: The spatial acceleration vector V t R 6 is defined as follows V t = a dv t t dt = (16) ω t dω t dt In order to obtain a causal motion, the function S t should be a strictly increasing function, that means dst dt > 0. Therefore we will express S t as the integral of a strictly positive function s t > 0, as follows S t = t τ=0 s τ dτ (17) Let us rewrite the quantities in Eqs (15) and (16) with respect to the mapping function S t V St = dx t ds t dθ t ds t X t s t t θ t s t t V St = d V S t 1 ( ) VSt V St 1 d S t S t X t t st 1 X t 1 t s t s 2 t st 1 t θ t t st 1 θ t 1 t s t s 2 t st 1 t (18) C. Minimum Time and Dynamically Stable Trajectory (19) Let us suppose that the first stage provides a path which consists of L points. At first, we transform this path to a trajectory by considering a uniform time distribution function. In other words, we suppose that s t = 1 : t in (17). We denote T = L t. In our case, we would obtain a minimum time trajectory which is not only dynamically stable but also it should respect the joint velocity limits of the humanoid robot. Therefore, the optimization problem can be formulated as follow T min S T = min s t dt s t t=0 subject to s t > 0 (20) p s t p st p + s t q q st q + where p st is the ZMP vector, p s t and p + s t design the polygon of support for the humanoid robot. The vector q st denotes the joint velocity of the humanoid robot, and q and q + design its upper and lower limits. Let us write p st as function of s t where p st = N n τ ( f n) (21) n ( τ = m i Xt ci (g c ) ) i Lci (22) n f = Mg m i c i
5 in which X c i t t c i = s t 1 Xci t 1 t s t s t2 s t 1 t ( ) L ci = R i I ci ω i (I ci ω i ) ω i ω i = θ c i t ω i = θci t s t t. In similar way we obtain t s t 1 θci t s t2 s t 1 t q st = q t s t t t 1 s t (23) (24) It is clear that the optimization problem (20) is polynomial in s t, so the gradient and Jacobian functions can be calculated easily. D. Discretization of solution space In real fact, the space of the admissible solutions of the minimization problem (20) is very large. In order to transform this space to a smaller dimensional space, we can use a basis of shape functions (e,g cubic B-spline functions). Let us consider a basis of shape functions B t that is defined as follows B t = [ B 1 t B 2 t B l t] T (25) where B i t denotes the value of shape function number i at the instant t, the dimension of B t is l defines the dimension of the basis of shape functions. The projection of s t into the basis of shape functions B t can be given by the following formula s t = l s i B Bt i = s T B B t (26) Thus, the optimization problem (20) can be written as follows min s B l k=1 s k B subject to s T BB t > 0 T t=0 p s B p sb p + s B q q sb q + B k t dt (27) The optimization problem has been transformed into finding the vector s B R l, and, in its new form, it can be solved using C-FSQP [13]. Note that the support polygon is a function of s B, and it depends on the horizontal position of CoM. However, as the path provided by the first stage is a statically stable one, the path can be split into various sections. Each section is a statically stable path which has a fixed support polygon and it is independent from s B. E. Implementation Algorithm of Second Stage The algorithm of the second stage can be summarized as follows 1) Given a path. 2) Transform the path to a trajectory by considering a uniform time distribution function. 3) Calculate q t, Xt ci and θt ci from the obtained trajectory. 4) Choose t, e,g, t = [s]. 5) Calculate the cubic B-spline functions. 6) Split the path into verious sections depending on the place and shape of support polygon during the motion. The support polygon for each section is fixed and independent from the time. 7) Solve the optimization problem (27) for each path with the initial solution obtained from the above steps. V. SIMULATION In this section, we confirm effectiveness of our strategy using two examples. A. Toy World Scenario The first example is a collision-free reaching motion in the cluttered environment. In this example, the task of the robot is to move its left hand to the specified position p h. The objective function of Problem (1) is given as follows. where J h q ṗ h 2 ṗ h = δp max p h p h (q) p h p h (q) (28) Inequality (3),(4) and Equality (7) are used as constraints over joint velocities. ξ,d i and d s of Inequality (3) are set to 0.5[m/s], 0.05[m] and 0.03[m] respectively. Those of Inequality (4) are set to 0.5[rad/s], 0.2[rad] and 0.05[rad] respectively. In this example, since the robot is standing on the right leg from the beginning, ṗ c is set to 0. The reaching motion is obtained by solving Problem (1) until the hand reaches p g. Figure 4 shows the initial configuration and the final one. Figure 1 also shows the final configuration from another viewpoint. Red lines show pairs of points to be constrained. The robot is standing on its right leg with surrounded by a torus, a cylinder and a box in the initial configuration. The reaching target is placed at the other side of the torus. In the final configuration, the left arm and the head are avoiding collisions with the torus and the left leg and the right arm are with the cylinder and the box respectively. The computational time of the first stage is mainly decided by the number of constraints for collision avoidance and it depends on the number of pairs of triangles in influence zone. The computational time can be saved by reducing the number of pairs. The reduction can be done by the following two methods. The first one is to make influence zone thin by making the difference between d i and d s small. But it leads to big accelerations since the velocity of constrained




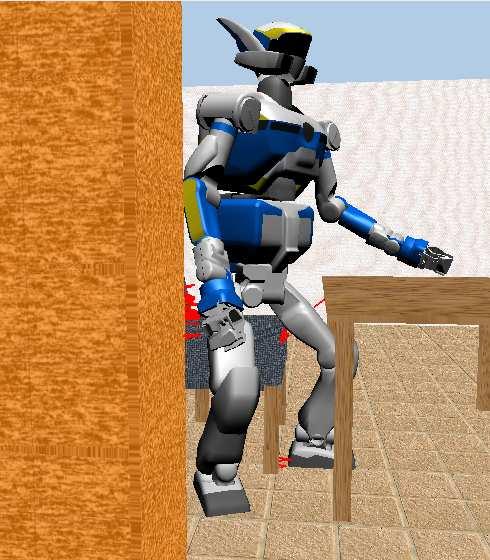
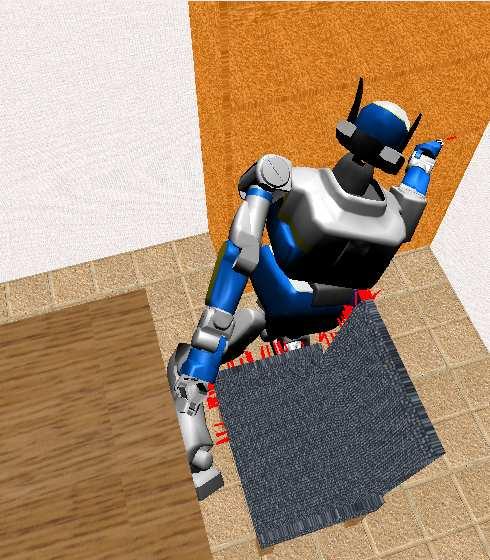
6 Fig. 4. Initial and final configurations of whole body reaching: In the final configuration, the left arm and the head are avoiding collisions with the torus and the left leg and the right arm are with the cylinder and the box respectively. points are decreased quickly. This is not preferable to obtain a short trajectory in the next stage. The second method is to simplify geometric models of the robot and the environment. If the simplified model contains the precise one in it, the path obtained using simplified model is also valid for the precise one. Figure 5 shows a precise model and a simplified one of HRP-2. The precise one consists of triangles and the simplified one does of 1140 triangles. The computational times and the number of constraints are compared while combining these models and models of torus. The precise torus consists of 800 triangles and the simplified one does of 288 triangles. Table I shows averages of the computational time in [s] and the number of constraints (the number between parentheses) for one computational step. The computational time can be drastically reduced by using a simplified model. Once the collision-free path is available, this path is converted to a trajectory using a uniform time distribution function. The obtained trajectory is then used to initialize Problem (27). Solving Problem (27) yields a minimum time and dynamically stable trajectory. The computation time of the second stage is obviously depends on the length of the path and the dimension of the basis of cubic B- spline functions. For this scenario, we have chosen: t = [s], and a basis of 120 cubic B-spline functions. The function s t is given in Figure 6. The duration of minimum time dynamically stable trajectory is around 24[s] instead of 77[s] for the original uniform time distribution trajectory. That means the optimized trajectory is around 3 times faster than the original one. However it s not always the case, for example if the original trajectory is fast and dynamically unstable, then the optimized trajectory will be slower. Though the optimized trajectory is the minimum time trajectory of the dynamically stable trajectories. The trajectory of ZMP is given in Figure 7. B. In a Room Scenario The second example is on HRP-2 in its room. Figure 8 shows snapshots of this scenario. Each row shows snapshots along time-line and each column does from different viewpoints. In the first frame, HRP-2 is sleeping but there is no Fig. 5. Precise model(left) and simplified model(right) TABLE I AVERAGES OF THE COMPUTATIONAL TIME[S] AND THE NUMBER OF s t ZMP x (mm) ZMP y (mm) HRP-2 CONSTRAINTS torus precise simplified precise 1.47(3460) 0.45(1803) simplified 0.10(698) 0.05(375) Time [s] Fig. 6. Time parameterization function (s t) Time [s] Fig. 7. ZMP x and ZMP y trajectories in solid lines, and the safety zones for dynamical stability are designed by the dashed lines
7 contacts among HRP-2, the chair and the table. We inserted gaps which are bigger than d s since constraints for collision avoidance don t work correctly if distances are smaller than d s. And then it stands up(b), gets out of a gap between the table and the chair(c e) and tries to grasp something on the shelf(f). The scenario is split into three parts, (A) stretching, (B) stepping and (C) reaching to switch objective functions and constraints in Problem (1). In part (A) the task is to going to a goal configuration q and the objective function is defined as follows. where q q 2 q q q = δq max max,,n q i q i The part (B) is split into two parts again, (B-1) moving CoM and (B-2) moving foot. Multiple steps can be done by repeating these two parts. Since the first stage must generate a statically stable path, a resultant walking is a static one. In part (B-1), ṗ c is computed in the same way with Eq.(28). Paths for the part (B-2) and (C) are generated in the same way with the previous example. Goal configurations and points of feet and the hand are selected by hand. VI. CONCLUSIONS AND FUTURE WORKS In this paper, we proposed a collision-free and dynamically stable whole body motion planning method. The method and its contributions are summarized as follows. The method consists of two stages. A collision-free statically stable path is planned in the first stage. The path is transformed into a minimum time and dynamically stable trajectory in the second stage. A local method in the first stage can generate a differentiable path while avoiding collisions between nonstrictly convex objects. Since the first stage plans a statically stable path and the second stage doesn t change shape of the path, the trajectory can be always obtained without iterating two stages. Since the path is generated using a local method, the planner might be trapped by local minima. We are woking on integration with a global method like PRM[14] or RRT[15]. The followings are limitations of our strategy and future works. Since the first stage of the method must plan a statically stable path, this method can t be applied to faster motions where CoM goes out of the support polygon like a biped walking. The robot might slip or jump. Because forces and the moment around the vertical axis are not constrained. REFERENCES [1] L. Sentis and O. Khatib, A Whole-Body Control Framework for Humanoids Operating in Human Environments, in Proc. of International Conference on Robotics and Automation, 2006, pp [2] J. Kuffner, K. Nishiwaki, S. Kagami, M. Inaba, and H. Inoue, Motion Planning for Humanoid Robots Under Obstacle and Dynamic Balance Constraints, in Proc. of the 2001 IEEE International Conference on Robotics & Automation, 2001, pp [3] H. Sanada, E. Yoshida, and K. Yokoi, Passing Under Obstacles with Humanoid Robots, in Proc. of the IEEE/RSJ International Conference on Intelligent Robotics and Systems (IROS 07), 2007, pp [4] E. Yoshida, I. Belousov, C. Esteves, and J.-P. Laumond, Humanoid Motion Planning for Dynamic Tasks, in Proc. of the IEEE-RAS International Conference on Humanoid Robots, 2005, pp [5] E. Yoshida, Humanoid Motion Planning using Multi-Level DOF Exploitation based on Randomized Method, in Proc. of the IEEE/RSJ International Conference on Intelligent Robotics and Systems (IROS 05), 2005, pp [6] K. Harada, S. Hattori, H. Hirukawa, M. Morisawa, S. Kajita, and E. Yoshida, Motion Planning for Walking Pattern Generation of Humanoid Robots, in Proc. of the IEEE/RSJ International Conference on Intelligent Robotics and Systems (IROS 07), 2007, pp [7] F. Kanehiro, F. Lamiraux, O. Kanoun, E. Yoshida, and J.-P. Laumond, A Local Collision Avoidance Method for Non-strictly Convex Objects, in Technical report LAAS-CNRS 08025, [8] K. Kaneko, F. Kanehiro, S. Kajita, H. Hirukawa, T. Kawasaki, M. Hirata, K. Akachi, and T. Isozumi, Humanoid Robot HRP-2, in Proc. of IEEE International Conference on Robotics and Automation, 2004, pp [9] I. Belousov, C. Estevès, J.-P. Laumond, and E. Ferré, Motion planning for the large space manipulators with complicated dynamics, in Proc. of the IEEE/RSJ International Conference on Intelligent Robotics and Systems (IROS 05), 2005, pp [10] M. Renaud and J. Y. Fourquet, Time-optimal Motions of Robot Manipulators Including Dynamics, The robotics review 2, pp , [11] F. Lamiraux and J.-P. Laumond, From Paths to Trajectories for Multibody Mobile Robots, in Proc. of the Fifth International Symposium on Experimental Robotics, London, UK, 1998, pp [12] B. Faverjon and P. Tournassoud, A Local Based Approach for Path Planning of Manipulators With a High Number of Degrees of Freedom, in Proc. of IEEE International Conference on Robotics and Automation, 1987, pp [13] C. Lawrence, J. L. Zhou, and A. L. Tits, User s Guide for CFSQP Version 2.5: A C Code for Solving (Large Scale) Constrained Nonlinear (Minimax) Optimization Problems, Generating Iterates Satisfying All Inequality Constraints. [14] L. E. Kavraki, P. Svestka, J.-C. Latombe, and M. H. Overmars, Probabilistic Roadmaps for Path Planning in High-Dimensional Configuration Spaces, IEEE Transactions on Robotics and Automation, vol. 12, no. 4, pp , August [15] S. M. LaValle, Rapidly-exploring random trees: A new tool for path planning, TR98-11, Computer Science Dept., Iowa State University, October VII. ACKNOWLEDGMENTS We gratefully acknowledge AEM Design, developer of a powerful QP solver, C-FSQP[13].




8 Fig. 8. Snapshots of in a room scenario
A Local Collision Avoidance Method for Non-strictly Convex Polyhedra
 A Local Collision Avoidance Method for Non-strictly Convex Polyhedra Fumio Kanehiro, Florent Lamiraux, Oussama Kanoun, Eiichi Yoshida and Jean-Paul Laumond IS/AIST-ST2I/CNRS Joint Japanese-French Robotics
A Local Collision Avoidance Method for Non-strictly Convex Polyhedra Fumio Kanehiro, Florent Lamiraux, Oussama Kanoun, Eiichi Yoshida and Jean-Paul Laumond IS/AIST-ST2I/CNRS Joint Japanese-French Robotics
Motion Planning for Whole Body Tasks by Humanoid Robots
 Proceedings of the IEEE International Conference on Mechatronics & Automation Niagara Falls, Canada July 5 Motion Planning for Whole Body Tasks by Humanoid Robots Eiichi Yoshida 1, Yisheng Guan 1, Neo
Proceedings of the IEEE International Conference on Mechatronics & Automation Niagara Falls, Canada July 5 Motion Planning for Whole Body Tasks by Humanoid Robots Eiichi Yoshida 1, Yisheng Guan 1, Neo
SHORT PAPER Efficient reaching motion planning method for low-level autonomy of teleoperated humanoid robots
 Advanced Robotics, 214 Vol. 28, No. 7, 433 439, http://dx.doi.org/1.18/1691864.213.876931 SHORT PAPER Efficient reaching motion planning method for low-level autonomy of teleoperated humanoid robots Fumio
Advanced Robotics, 214 Vol. 28, No. 7, 433 439, http://dx.doi.org/1.18/1691864.213.876931 SHORT PAPER Efficient reaching motion planning method for low-level autonomy of teleoperated humanoid robots Fumio
Real-time Replanning Using 3D Environment for Humanoid Robot
 Real-time Replanning Using 3D Environment for Humanoid Robot Léo Baudouin, Nicolas Perrin, Thomas Moulard, Florent Lamiraux LAAS-CNRS, Université de Toulouse 7, avenue du Colonel Roche 31077 Toulouse cedex
Real-time Replanning Using 3D Environment for Humanoid Robot Léo Baudouin, Nicolas Perrin, Thomas Moulard, Florent Lamiraux LAAS-CNRS, Université de Toulouse 7, avenue du Colonel Roche 31077 Toulouse cedex
Small-Space Controllability of a Walking Humanoid Robot
 Small-Space Controllability of a Walking Humanoid Robot Se bastien Dalibard, Antonio El Khoury, Florent Lamiraux, Michel Taı x, Jean-Paul Laumond hal-00602384, version 2-19 Sep 2011 CNRS ; LAAS ; 7 avenue
Small-Space Controllability of a Walking Humanoid Robot Se bastien Dalibard, Antonio El Khoury, Florent Lamiraux, Michel Taı x, Jean-Paul Laumond hal-00602384, version 2-19 Sep 2011 CNRS ; LAAS ; 7 avenue
Motion Planning for Humanoid Robots: Highlights with HRP-2
 Motion Planning for Humanoid Robots: Highlights with HRP-2 Eiichi Yoshida 1,2 and Jean-Paul Laumond 2 AIST/IS-CNRS/ST2I Joint French-Japanese Robotics Laboratory (JRL) 1 Intelligent Systems Research Institute,
Motion Planning for Humanoid Robots: Highlights with HRP-2 Eiichi Yoshida 1,2 and Jean-Paul Laumond 2 AIST/IS-CNRS/ST2I Joint French-Japanese Robotics Laboratory (JRL) 1 Intelligent Systems Research Institute,
Self-Collision Detection. Planning for Humanoid Robots. Digital Human Research Center. Talk Overview
 Self-Collision Detection and Motion Planning for Humanoid Robots James Kuffner (CMU & AIST Japan) Digital Human Research Center Self-Collision Detection Feature-based Minimum Distance Computation: Approximate
Self-Collision Detection and Motion Planning for Humanoid Robots James Kuffner (CMU & AIST Japan) Digital Human Research Center Self-Collision Detection Feature-based Minimum Distance Computation: Approximate
Humanoid Robotics. Path Planning and Walking. Maren Bennewitz
 Humanoid Robotics Path Planning and Walking Maren Bennewitz 1 Introduction Given the robot s pose in a model of the environment Compute a path to a target location First: 2D path in a 2D grid map representation
Humanoid Robotics Path Planning and Walking Maren Bennewitz 1 Introduction Given the robot s pose in a model of the environment Compute a path to a target location First: 2D path in a 2D grid map representation
Sound and fast footstep planning for humanoid robots
 Sound and fast footstep planning for humanoid robots Nicolas Perrin, Olivier Stasse, Léo Baudouin, Florent Lamiraux, Eiichi Yoshida Abstract In this paper we present some concepts for sound and fast footstep
Sound and fast footstep planning for humanoid robots Nicolas Perrin, Olivier Stasse, Léo Baudouin, Florent Lamiraux, Eiichi Yoshida Abstract In this paper we present some concepts for sound and fast footstep
Simplified Walking: A New Way to Generate Flexible Biped Patterns
 1 Simplified Walking: A New Way to Generate Flexible Biped Patterns Jinsu Liu 1, Xiaoping Chen 1 and Manuela Veloso 2 1 Computer Science Department, University of Science and Technology of China, Hefei,
1 Simplified Walking: A New Way to Generate Flexible Biped Patterns Jinsu Liu 1, Xiaoping Chen 1 and Manuela Veloso 2 1 Computer Science Department, University of Science and Technology of China, Hefei,
Self-Collision Detection and Prevention for Humanoid Robots. Talk Overview
 Self-Collision Detection and Prevention for Humanoid Robots James Kuffner, Jr. Carnegie Mellon University Koichi Nishiwaki The University of Tokyo Satoshi Kagami Digital Human Lab (AIST) Masayuki Inaba
Self-Collision Detection and Prevention for Humanoid Robots James Kuffner, Jr. Carnegie Mellon University Koichi Nishiwaki The University of Tokyo Satoshi Kagami Digital Human Lab (AIST) Masayuki Inaba
Motion Planning of Emergency Stop for Humanoid Robot by State Space Approach
 Motion Planning of Emergency Stop for Humanoid Robot by State Space Approach Mitsuharu Morisawa, Kenji Kaneko, Fumio Kanehiro, Shuuji Kajita, Kiyoshi Fujiwara, Kensuke Harada, Hirohisa Hirukawa National
Motion Planning of Emergency Stop for Humanoid Robot by State Space Approach Mitsuharu Morisawa, Kenji Kaneko, Fumio Kanehiro, Shuuji Kajita, Kiyoshi Fujiwara, Kensuke Harada, Hirohisa Hirukawa National
A 2-Stages Locomotion Planner for Digital Actors
 A 2-Stages Locomotion Planner for Digital Actors Julien Pettré LAAS-CNRS 7, avenue du Colonel Roche 31077 Cedex 4 Toulouse, FRANCE Jean-Paul Laumond LAAS-CNRS 7, avenue du Colonel Roche 31077 Cedex 4 Toulouse,
A 2-Stages Locomotion Planner for Digital Actors Julien Pettré LAAS-CNRS 7, avenue du Colonel Roche 31077 Cedex 4 Toulouse, FRANCE Jean-Paul Laumond LAAS-CNRS 7, avenue du Colonel Roche 31077 Cedex 4 Toulouse,
Collision-free walk planning for humanoid robots using numerical optimization
 Collision-free walk planning for humanoid robots using numerical optimization Thomas Moulard, Florent Lamiraux, Pierre-Brice Wieber To cite this version: Thomas Moulard, Florent Lamiraux, Pierre-Brice
Collision-free walk planning for humanoid robots using numerical optimization Thomas Moulard, Florent Lamiraux, Pierre-Brice Wieber To cite this version: Thomas Moulard, Florent Lamiraux, Pierre-Brice
Study on Dynamics Identification of the Foot Viscoelasticity of a Humanoid Robot
 Preprints of the 19th World Congress The International Federation of Automatic Control Cape Town, South Africa. August 24-29, 214 Study on Dynamics Identification of the Foot Viscoelasticity of a Humanoid
Preprints of the 19th World Congress The International Federation of Automatic Control Cape Town, South Africa. August 24-29, 214 Study on Dynamics Identification of the Foot Viscoelasticity of a Humanoid
A Walking Pattern Generator for Biped Robots on Uneven Terrains
 A Walking Pattern Generator for Biped Robots on Uneven Terrains Yu Zheng, Ming C. Lin, Dinesh Manocha Albertus Hendrawan Adiwahono, Chee-Meng Chew Abstract We present a new method to generate biped walking
A Walking Pattern Generator for Biped Robots on Uneven Terrains Yu Zheng, Ming C. Lin, Dinesh Manocha Albertus Hendrawan Adiwahono, Chee-Meng Chew Abstract We present a new method to generate biped walking
Motion Planning of Human-Like Robots using Constrained Coordination
 Motion Planning of Human-Like Robots using Constrained Coordination Liangjun Zhang Jia Pan Dinesh Manocha {zlj,panj,dm}@cs.unc.edu Dept. of Computer Science, University of North Carolina at Chapel Hill
Motion Planning of Human-Like Robots using Constrained Coordination Liangjun Zhang Jia Pan Dinesh Manocha {zlj,panj,dm}@cs.unc.edu Dept. of Computer Science, University of North Carolina at Chapel Hill
Generating Whole Body Motions for a Biped Humanoid Robot from Captured Human Dances
 Generating Whole Body Motions for a Biped Humanoid Robot from Captured Human Dances Shinichiro Nakaoka Atsushi Nakazawa Kazuhito Yokoi Hirohisa Hirukawa Katsushi Ikeuchi Institute of Industrial Science,
Generating Whole Body Motions for a Biped Humanoid Robot from Captured Human Dances Shinichiro Nakaoka Atsushi Nakazawa Kazuhito Yokoi Hirohisa Hirukawa Katsushi Ikeuchi Institute of Industrial Science,
Instant Prediction for Reactive Motions with Planning
 The 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems October 11-15, 2009 St. Louis, USA Instant Prediction for Reactive Motions with Planning Hisashi Sugiura, Herbert Janßen, and
The 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems October 11-15, 2009 St. Louis, USA Instant Prediction for Reactive Motions with Planning Hisashi Sugiura, Herbert Janßen, and
A sliding walk method for humanoid robots using ZMP feedback control
 A sliding walk method for humanoid robots using MP feedback control Satoki Tsuichihara, Masanao Koeda, Seiji Sugiyama, and Tsuneo oshikawa Abstract In this paper, we propose two methods for a highly stable
A sliding walk method for humanoid robots using MP feedback control Satoki Tsuichihara, Masanao Koeda, Seiji Sugiyama, and Tsuneo oshikawa Abstract In this paper, we propose two methods for a highly stable
Leg Motion Primitives for a Humanoid Robot to Imitate Human Dances
 Leg Motion Primitives for a Humanoid Robot to Imitate Human Dances Shinichiro Nakaoka 1, Atsushi Nakazawa 2, Kazuhito Yokoi 3 and Katsushi Ikeuchi 1 1 The University of Tokyo,Tokyo, Japan (nakaoka@cvl.iis.u-tokyo.ac.jp)
Leg Motion Primitives for a Humanoid Robot to Imitate Human Dances Shinichiro Nakaoka 1, Atsushi Nakazawa 2, Kazuhito Yokoi 3 and Katsushi Ikeuchi 1 1 The University of Tokyo,Tokyo, Japan (nakaoka@cvl.iis.u-tokyo.ac.jp)
Dynamically Stepping Over Obstacles by the Humanoid Robot HRP-2
 Dynamically Stepping Over Obstacles by the Humanoid Robot HRP-2 Björn Verrelst, Olivier Stasse, Kazuhito Yokoi Bram Vanderborght Joint Japanese-French Robotics Laboratory (JRL) Robotics & Multibody Mechanics
Dynamically Stepping Over Obstacles by the Humanoid Robot HRP-2 Björn Verrelst, Olivier Stasse, Kazuhito Yokoi Bram Vanderborght Joint Japanese-French Robotics Laboratory (JRL) Robotics & Multibody Mechanics
Intuitive and Flexible User Interface for Creating Whole Body Motions of Biped Humanoid Robots
 The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Intuitive and Flexible User Interface for Creating Whole Body Motions of Biped Humanoid
The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Intuitive and Flexible User Interface for Creating Whole Body Motions of Biped Humanoid
Planning Fine Motions for a Digital Factotum
 Planning Fine Motions for a Digital Factotum Gustavo Arechavaleta Claudia Esteves LAAS-CNRS 7, avenue du Colonel Roche 31077, Toulouse Cedex, France {garechav, cesteves, jpl}@laas.fr Jean-Paul Laumond
Planning Fine Motions for a Digital Factotum Gustavo Arechavaleta Claudia Esteves LAAS-CNRS 7, avenue du Colonel Roche 31077, Toulouse Cedex, France {garechav, cesteves, jpl}@laas.fr Jean-Paul Laumond
Adaptive Motion Control: Dynamic Kick for a Humanoid Robot
 Adaptive Motion Control: Dynamic Kick for a Humanoid Robot Yuan Xu and Heinrich Mellmann Institut für Informatik, LFG Künstliche Intelligenz Humboldt-Universität zu Berlin, Germany {xu,mellmann}@informatik.hu-berlin.de
Adaptive Motion Control: Dynamic Kick for a Humanoid Robot Yuan Xu and Heinrich Mellmann Institut für Informatik, LFG Künstliche Intelligenz Humboldt-Universität zu Berlin, Germany {xu,mellmann}@informatik.hu-berlin.de
Fast and Dynamically Stable Optimization-based Planning for High-DOF Human-like Robots
 Fast and Dynamically Stable Optimization-based Planning for High-DOF Human-like Robots Chonhyon Park and Dinesh Manocha http://gamma.cs.unc.edu/itomp/ (Videos included) Abstract We present a novel optimization-based
Fast and Dynamically Stable Optimization-based Planning for High-DOF Human-like Robots Chonhyon Park and Dinesh Manocha http://gamma.cs.unc.edu/itomp/ (Videos included) Abstract We present a novel optimization-based
Prioritizing linear equality and inequality systems: application to local motion planning for redundant. robots
 Prioritizing linear equality and inequality systems: application to local motion planning for redundant robots Oussama Kanoun, Florent Lamiraux, Pierre-Brice Wieber, Fumio Kanehiro, Eiichi Yoshida, Jean-Paul
Prioritizing linear equality and inequality systems: application to local motion planning for redundant robots Oussama Kanoun, Florent Lamiraux, Pierre-Brice Wieber, Fumio Kanehiro, Eiichi Yoshida, Jean-Paul
David Galdeano. LIRMM-UM2, Montpellier, France. Members of CST: Philippe Fraisse, Ahmed Chemori, Sébatien Krut and André Crosnier
 David Galdeano LIRMM-UM2, Montpellier, France Members of CST: Philippe Fraisse, Ahmed Chemori, Sébatien Krut and André Crosnier Montpellier, Thursday September 27, 2012 Outline of the presentation Context
David Galdeano LIRMM-UM2, Montpellier, France Members of CST: Philippe Fraisse, Ahmed Chemori, Sébatien Krut and André Crosnier Montpellier, Thursday September 27, 2012 Outline of the presentation Context
Time-Optimal Path Parameterization for Critically Dynamic Motions of Humanoid Robots
 Time-Optimal Path Parameterization for Critically Dynamic Motions of Humanoid Robots Quang-Cuong Pham and Yoshihiko Nakamura Department of Mechano-Informatics University of Tokyo, Japan Abstract Planning
Time-Optimal Path Parameterization for Critically Dynamic Motions of Humanoid Robots Quang-Cuong Pham and Yoshihiko Nakamura Department of Mechano-Informatics University of Tokyo, Japan Abstract Planning
Motion Planning for Humanoid Robots
 Motion Planning for Humanoid Robots Presented by: Li Yunzhen What is Humanoid Robots & its balance constraints? Human-like Robots A configuration q is statically-stable if the projection of mass center
Motion Planning for Humanoid Robots Presented by: Li Yunzhen What is Humanoid Robots & its balance constraints? Human-like Robots A configuration q is statically-stable if the projection of mass center
Motion autonomy for humanoids: experiments on HRP-2 No. 14. Introduction
 COMPUTER ANIMATION AND VIRTUAL WORLDS Comp. Anim. Virtual Worlds 2009; 20: 511 522 Published online 13 February 2009 in Wiley InterScience (www.interscience.wiley.com).280 Motion autonomy for humanoids:
COMPUTER ANIMATION AND VIRTUAL WORLDS Comp. Anim. Virtual Worlds 2009; 20: 511 522 Published online 13 February 2009 in Wiley InterScience (www.interscience.wiley.com).280 Motion autonomy for humanoids:
arxiv: v1 [cs.ro] 23 May 2018
![arxiv: v1 [cs.ro] 23 May 2018](/thumbs/87/95584176.jpg "arxiv: v1 [cs.ro] 23 May 2018") Tool Exchangeable Grasp/Assembly Planner Kensuke Harada 1,2, Kento Nakayama 1, Weiwei Wan 1,2, Kazuyuki Nagata 2 Natsuki Yamanobe 2, and Ixchel G. Ramirez-Alpizar 1 arxiv:1805.08962v1 [cs.ro] 23 May 2018
Tool Exchangeable Grasp/Assembly Planner Kensuke Harada 1,2, Kento Nakayama 1, Weiwei Wan 1,2, Kazuyuki Nagata 2 Natsuki Yamanobe 2, and Ixchel G. Ramirez-Alpizar 1 arxiv:1805.08962v1 [cs.ro] 23 May 2018
Interaction Mesh Based Motion Adaptation for Biped Humanoid Robots
 Interaction Mesh Based Motion Adaptation for Biped Humanoid Robots Shin ichiro Nakaoka 12 and Taku Komura 1 Abstract Adapting human motion data for humanoid robots can be an efficient way to let them conduct
Interaction Mesh Based Motion Adaptation for Biped Humanoid Robots Shin ichiro Nakaoka 12 and Taku Komura 1 Abstract Adapting human motion data for humanoid robots can be an efficient way to let them conduct
Hierarchical Optimization-based Planning for High-DOF Robots
 Hierarchical Optimization-based Planning for High-DOF Robots Chonhyon Park and Jia Pan and Dinesh Manocha Abstract We present an optimization-based motion planning algorithm for high degree-of-freedom
Hierarchical Optimization-based Planning for High-DOF Robots Chonhyon Park and Jia Pan and Dinesh Manocha Abstract We present an optimization-based motion planning algorithm for high degree-of-freedom
Motion Planning for a Vigilant Humanoid Robot
 9th IEEE-RAS International Conference on Humanoid Robots December 7-10, 2009 Paris, France Motion Planning for a Vigilant Humanoid Robot Jean-Bernard Hayet 1 Claudia Esteves 2 Gustavo Arechavaleta 3 Eiichi
9th IEEE-RAS International Conference on Humanoid Robots December 7-10, 2009 Paris, France Motion Planning for a Vigilant Humanoid Robot Jean-Bernard Hayet 1 Claudia Esteves 2 Gustavo Arechavaleta 3 Eiichi
Planning Humanoid Multi-Contact Dynamic Motion using Optimization Techniques
 Planning Humanoid Multi-Contact Dynamic Motion using Optimization Techniques Abderrahmane KHEDDAR with Karim BOUYARMANE, Adrien ESCANDE, Sébastien LENGAGNE, Sylvain MIOSSEC, Eiichi YOSHIDA CNRS-AIST Joint
Planning Humanoid Multi-Contact Dynamic Motion using Optimization Techniques Abderrahmane KHEDDAR with Karim BOUYARMANE, Adrien ESCANDE, Sébastien LENGAGNE, Sylvain MIOSSEC, Eiichi YOSHIDA CNRS-AIST Joint
Motion Retargeting for Humanoid Robots Based on Identification to Preserve and Reproduce Human Motion Features
 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) Congress Center Hamburg Sept 28 - Oct 2, 2015. Hamburg, Germany Motion Retargeting for Humanoid Robots Based on Identification
2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) Congress Center Hamburg Sept 28 - Oct 2, 2015. Hamburg, Germany Motion Retargeting for Humanoid Robots Based on Identification
Optimization of a two-link Robotic Manipulator
 Optimization of a two-link Robotic Manipulator Zachary Renwick, Yalım Yıldırım April 22, 2016 Abstract Although robots are used in many processes in research and industry, they are generally not customized
Optimization of a two-link Robotic Manipulator Zachary Renwick, Yalım Yıldırım April 22, 2016 Abstract Although robots are used in many processes in research and industry, they are generally not customized
Arm Trajectory Planning by Controlling the Direction of End-point Position Error Caused by Disturbance
 28 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Xi'an, China, July, 28. Arm Trajectory Planning by Controlling the Direction of End- Position Error Caused by Disturbance Tasuku
28 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Xi'an, China, July, 28. Arm Trajectory Planning by Controlling the Direction of End- Position Error Caused by Disturbance Tasuku
Upper Body Joints Control for the Quasi static Stabilization of a Small-Size Humanoid Robot
 Upper Body Joints Control for the Quasi static Stabilization of a Small-Size Humanoid Robot Andrea Manni, Angelo di Noi and Giovanni Indiveri Dipartimento Ingegneria dell Innovazione, Università di Lecce
Upper Body Joints Control for the Quasi static Stabilization of a Small-Size Humanoid Robot Andrea Manni, Angelo di Noi and Giovanni Indiveri Dipartimento Ingegneria dell Innovazione, Università di Lecce
Research on time optimal trajectory planning of 7-DOF manipulator based on genetic algorithm
 Acta Technica 61, No. 4A/2016, 189 200 c 2017 Institute of Thermomechanics CAS, v.v.i. Research on time optimal trajectory planning of 7-DOF manipulator based on genetic algorithm Jianrong Bu 1, Junyan
Acta Technica 61, No. 4A/2016, 189 200 c 2017 Institute of Thermomechanics CAS, v.v.i. Research on time optimal trajectory planning of 7-DOF manipulator based on genetic algorithm Jianrong Bu 1, Junyan
HUMANOID robots have recently attracted growing social
 IEEE TRANSACTIONS ON ROBOTICS 1 Motion Retargeting for Humanoid Robots Based on Simultaneous Morphing Parameter Identification and Motion Optimization Ko Ayusawa, Member, IEEE, and Eiichi Yoshida, Senior
IEEE TRANSACTIONS ON ROBOTICS 1 Motion Retargeting for Humanoid Robots Based on Simultaneous Morphing Parameter Identification and Motion Optimization Ko Ayusawa, Member, IEEE, and Eiichi Yoshida, Senior
Planning Whole-body Humanoid Locomotion, Reaching, and Manipulation
 Planning Whole-body Humanoid Locomotion, Reaching, and Manipulation Eiichi Yoshida, Claudia Esteves, Oussama Kanoun, Mathieu Poirier, Anthony Mallet, Jean-Paul Laumond and Kazuhito Yokoi Abstract In this
Planning Whole-body Humanoid Locomotion, Reaching, and Manipulation Eiichi Yoshida, Claudia Esteves, Oussama Kanoun, Mathieu Poirier, Anthony Mallet, Jean-Paul Laumond and Kazuhito Yokoi Abstract In this
Research Subject. Dynamics Computation and Behavior Capture of Human Figures (Nakamura Group)
") Research Subject Dynamics Computation and Behavior Capture of Human Figures (Nakamura Group) (1) Goal and summary Introduction Humanoid has less actuators than its movable degrees of freedom (DOF) which
Research Subject Dynamics Computation and Behavior Capture of Human Figures (Nakamura Group) (1) Goal and summary Introduction Humanoid has less actuators than its movable degrees of freedom (DOF) which
Leg Motion Primitives for a Dancing Humanoid Robot
 Leg Motion Primitives for a Dancing Humanoid Robot Shinichiro Nakaoka, Atsushi Nakazawa, Kazuhito Yokoi and Katsushi Ikeuchi Institute of Industrial Science, The University of Tokyo 4-6-1 Komaba, Meguro-ku,
Leg Motion Primitives for a Dancing Humanoid Robot Shinichiro Nakaoka, Atsushi Nakazawa, Kazuhito Yokoi and Katsushi Ikeuchi Institute of Industrial Science, The University of Tokyo 4-6-1 Komaba, Meguro-ku,
Path Planning. Jacky Baltes Dept. of Computer Science University of Manitoba 11/21/10
 Path Planning Jacky Baltes Autonomous Agents Lab Department of Computer Science University of Manitoba Email: jacky@cs.umanitoba.ca http://www.cs.umanitoba.ca/~jacky Path Planning Jacky Baltes Dept. of
Path Planning Jacky Baltes Autonomous Agents Lab Department of Computer Science University of Manitoba Email: jacky@cs.umanitoba.ca http://www.cs.umanitoba.ca/~jacky Path Planning Jacky Baltes Dept. of
Mobility of Humanoid Robots: Stepping over Large Obstacles Dynamically
 Mobility of Humanoid Robots: Stepping over Large Obstacles Dynamically Björn Verrelst, Kazuhito Yokoi, Olivier Stasse, and Hitoshi Arisumi Bram Vanderborght Joint Japanese-French Robotics Laboratory (JRL)
Mobility of Humanoid Robots: Stepping over Large Obstacles Dynamically Björn Verrelst, Kazuhito Yokoi, Olivier Stasse, and Hitoshi Arisumi Bram Vanderborght Joint Japanese-French Robotics Laboratory (JRL)
Path Planning in Dimensions Using a Task-Space Voronoi Bias
 Path Planning in 1000+ Dimensions Using a Task-Space Voronoi Bias Alexander Shkolnik and Russ Tedrake Abstract The reduction of the kinematics and/or dynamics of a high-dof robotic manipulator to a low-dimension
Path Planning in 1000+ Dimensions Using a Task-Space Voronoi Bias Alexander Shkolnik and Russ Tedrake Abstract The reduction of the kinematics and/or dynamics of a high-dof robotic manipulator to a low-dimension
Biped Walking Control Based on Hybrid Position/Force Control
 The 29 IEEE/RSJ International Conference on Intelligent Robots and Systems October -5, 29 St. Louis, USA Biped Walking Control Based on Hybrid Position/Force Control Thomas Buschmann, Sebastian Lohmeier
The 29 IEEE/RSJ International Conference on Intelligent Robots and Systems October -5, 29 St. Louis, USA Biped Walking Control Based on Hybrid Position/Force Control Thomas Buschmann, Sebastian Lohmeier
Whole-Body Motion Planning for Manipulation of Articulated Objects
 Whole-Body Motion Planning for Manipulation of Articulated Objects Felix Burget Armin Hornung Maren Bennewitz Abstract Humanoid service robots performing complex object manipulation tasks need to plan
Whole-Body Motion Planning for Manipulation of Articulated Objects Felix Burget Armin Hornung Maren Bennewitz Abstract Humanoid service robots performing complex object manipulation tasks need to plan
Etienne Ferré*, Jean-Paul Laumond**, Gustavo Arechavaleta**, Claudia Estevès**
 International Conference on Product Lifecycle Management 1 Progresses in assembly path planning Etienne Ferré*, Jean-Paul Laumond**, Gustavo Arechavaleta**, Claudia Estevès** *KINEO C.A.M. Prologue, BP
International Conference on Product Lifecycle Management 1 Progresses in assembly path planning Etienne Ferré*, Jean-Paul Laumond**, Gustavo Arechavaleta**, Claudia Estevès** *KINEO C.A.M. Prologue, BP
Non-Gaited Humanoid Locomotion Planning
 Non-Gaited Humanoid Locomotion Planning Kris Hauser, Tim Bretl, and Jean-Claude Latombe Stanford University Stanford, CA 94307, USA khauser@cs.stanford.edu, tbretl@stanford.edu, latombe@cs.stanford.edu
Non-Gaited Humanoid Locomotion Planning Kris Hauser, Tim Bretl, and Jean-Claude Latombe Stanford University Stanford, CA 94307, USA khauser@cs.stanford.edu, tbretl@stanford.edu, latombe@cs.stanford.edu
Lesson 1: Introduction to Pro/MECHANICA Motion
 Lesson 1: Introduction to Pro/MECHANICA Motion 1.1 Overview of the Lesson The purpose of this lesson is to provide you with a brief overview of Pro/MECHANICA Motion, also called Motion in this book. Motion
Lesson 1: Introduction to Pro/MECHANICA Motion 1.1 Overview of the Lesson The purpose of this lesson is to provide you with a brief overview of Pro/MECHANICA Motion, also called Motion in this book. Motion
Lecture 18 Kinematic Chains
 CS 598: Topics in AI - Adv. Computational Foundations of Robotics Spring 2017, Rutgers University Lecture 18 Kinematic Chains Instructor: Jingjin Yu Outline What are kinematic chains? C-space for kinematic
CS 598: Topics in AI - Adv. Computational Foundations of Robotics Spring 2017, Rutgers University Lecture 18 Kinematic Chains Instructor: Jingjin Yu Outline What are kinematic chains? C-space for kinematic
Configuration Space of a Robot
 Robot Path Planning Overview: 1. Visibility Graphs 2. Voronoi Graphs 3. Potential Fields 4. Sampling-Based Planners PRM: Probabilistic Roadmap Methods RRTs: Rapidly-exploring Random Trees Configuration
Robot Path Planning Overview: 1. Visibility Graphs 2. Voronoi Graphs 3. Potential Fields 4. Sampling-Based Planners PRM: Probabilistic Roadmap Methods RRTs: Rapidly-exploring Random Trees Configuration
Motion Capture & Simulation
 Motion Capture & Simulation Motion Capture Character Reconstructions Joint Angles Need 3 points to compute a rigid body coordinate frame 1 st point gives 3D translation, 2 nd point gives 2 angles, 3 rd
Motion Capture & Simulation Motion Capture Character Reconstructions Joint Angles Need 3 points to compute a rigid body coordinate frame 1 st point gives 3D translation, 2 nd point gives 2 angles, 3 rd
Adaptive Tuning of the Sampling Domain for Dynamic-Domain RRTs
 Adaptive Tuning of the Sampling Domain for Dynamic-Domain RRTs Léonard Jaillet Anna Yershova LAAS-CNRS 7, Avenue du Colonel Roche 31077 Toulouse Cedex 04,France {ljaillet, nic}@laas.fr Steven M. LaValle
Adaptive Tuning of the Sampling Domain for Dynamic-Domain RRTs Léonard Jaillet Anna Yershova LAAS-CNRS 7, Avenue du Colonel Roche 31077 Toulouse Cedex 04,France {ljaillet, nic}@laas.fr Steven M. LaValle
Fast foot prints re-planning and motion generation during walking in physical human-humanoid interaction
 Fast foot prints re-planning and motion generation during walking in physical human-humanoid interaction Olivier Stasse, Paul Evrard, Nicolas Perrin, Nicolas Mansard, Abderrahmane Kheddar Abstract In this
Fast foot prints re-planning and motion generation during walking in physical human-humanoid interaction Olivier Stasse, Paul Evrard, Nicolas Perrin, Nicolas Mansard, Abderrahmane Kheddar Abstract In this
Probabilistic Methods for Kinodynamic Path Planning
 16.412/6.834J Cognitive Robotics February 7 th, 2005 Probabilistic Methods for Kinodynamic Path Planning Based on Past Student Lectures by: Paul Elliott, Aisha Walcott, Nathan Ickes and Stanislav Funiak
16.412/6.834J Cognitive Robotics February 7 th, 2005 Probabilistic Methods for Kinodynamic Path Planning Based on Past Student Lectures by: Paul Elliott, Aisha Walcott, Nathan Ickes and Stanislav Funiak
Mobile Robot Path Planning in Static Environments using Particle Swarm Optimization
 Mobile Robot Path Planning in Static Environments using Particle Swarm Optimization M. Shahab Alam, M. Usman Rafique, and M. Umer Khan Abstract Motion planning is a key element of robotics since it empowers
Mobile Robot Path Planning in Static Environments using Particle Swarm Optimization M. Shahab Alam, M. Usman Rafique, and M. Umer Khan Abstract Motion planning is a key element of robotics since it empowers
Planning, Execution and Learning Application: Examples of Planning for Mobile Manipulation and Articulated Robots
 15-887 Planning, Execution and Learning Application: Examples of Planning for Mobile Manipulation and Articulated Robots Maxim Likhachev Robotics Institute Carnegie Mellon University Two Examples Planning
15-887 Planning, Execution and Learning Application: Examples of Planning for Mobile Manipulation and Articulated Robots Maxim Likhachev Robotics Institute Carnegie Mellon University Two Examples Planning
Real-time Replanning Using 3D Environment for Humanoid Robot
 Real-time Replanning Using 3D Environment for Humanoid Robot Léo Baudouin, Nicolas Perrin, Thomas Moulard, Florent Lamiraux, Olivier Stasse, Eiichi Yoshida To cite this version: Léo Baudouin, Nicolas Perrin,
Real-time Replanning Using 3D Environment for Humanoid Robot Léo Baudouin, Nicolas Perrin, Thomas Moulard, Florent Lamiraux, Olivier Stasse, Eiichi Yoshida To cite this version: Léo Baudouin, Nicolas Perrin,
Motion Planning of Multiple Mobile Robots for Cooperative Manipulation and Transportation
 IEEE TRANSACTIONS ON ROBOTICS AND AUTOMATION, VOL. 19, NO. 2, APRIL 2003 223 Motion Planning of Multiple Mobile Robots for Cooperative Manipulation and Transportation Atsushi Yamashita, Member, IEEE, Tamio
IEEE TRANSACTIONS ON ROBOTICS AND AUTOMATION, VOL. 19, NO. 2, APRIL 2003 223 Motion Planning of Multiple Mobile Robots for Cooperative Manipulation and Transportation Atsushi Yamashita, Member, IEEE, Tamio
Biped Walking Pattern Generation by using Preview Control of Zero-Moment Point
 Proceedings of the 23 IEEE International Conference on Robotics & Automation Taipei, Taiwan, September 4-9, 23 Biped Walking Pattern Generation by using Preview Control of Zero-Moment Point Shuuji KAJITA,
Proceedings of the 23 IEEE International Conference on Robotics & Automation Taipei, Taiwan, September 4-9, 23 Biped Walking Pattern Generation by using Preview Control of Zero-Moment Point Shuuji KAJITA,
FACOLTÀ DI INGEGNERIA DELL INFORMAZIONE ELECTIVE IN ROBOTICS. Quadrotor. Motion Planning Algorithms. Academic Year
 FACOLTÀ DI INGEGNERIA DELL INFORMAZIONE ELECTIVE IN ROBOTICS Quadrotor Motion Planning Algorithms Prof. Marilena Vendittelli Prof. Jean-Paul Laumond Jacopo Capolicchio Riccardo Spica Academic Year 2010-2011
FACOLTÀ DI INGEGNERIA DELL INFORMAZIONE ELECTIVE IN ROBOTICS Quadrotor Motion Planning Algorithms Prof. Marilena Vendittelli Prof. Jean-Paul Laumond Jacopo Capolicchio Riccardo Spica Academic Year 2010-2011
Autonomous and Mobile Robotics. Whole-body motion planning for humanoid robots (Slides prepared by Marco Cognetti) Prof.
 Prof.") Autonomous and Mobile Robotics Whole-body motion planning for humanoid robots (Slides prepared by Marco Cognetti) Prof. Giuseppe Oriolo Motivations task-constrained motion planning: find collision-free
Autonomous and Mobile Robotics Whole-body motion planning for humanoid robots (Slides prepared by Marco Cognetti) Prof. Giuseppe Oriolo Motivations task-constrained motion planning: find collision-free
Jacobian: Velocities and Static Forces 1/4
 Jacobian: Velocities and Static Forces /4 Models of Robot Manipulation - EE 54 - Department of Electrical Engineering - University of Washington Kinematics Relations - Joint & Cartesian Spaces A robot
Jacobian: Velocities and Static Forces /4 Models of Robot Manipulation - EE 54 - Department of Electrical Engineering - University of Washington Kinematics Relations - Joint & Cartesian Spaces A robot
II. RELATED WORK. A. Probabilistic roadmap path planner
 Gaussian PRM Samplers for Dynamic Configuration Spaces Yu-Te Lin and Shih-Chia Cheng Computer Science Department Stanford University Stanford, CA 94305, USA {yutelin, sccheng}@cs.stanford.edu SUID: 05371954,
Gaussian PRM Samplers for Dynamic Configuration Spaces Yu-Te Lin and Shih-Chia Cheng Computer Science Department Stanford University Stanford, CA 94305, USA {yutelin, sccheng}@cs.stanford.edu SUID: 05371954,
Modeling of Humanoid Systems Using Deductive Approach
 INFOTEH-JAHORINA Vol. 12, March 2013. Modeling of Humanoid Systems Using Deductive Approach Miloš D Jovanović Robotics laboratory Mihailo Pupin Institute Belgrade, Serbia milos.jovanovic@pupin.rs Veljko
INFOTEH-JAHORINA Vol. 12, March 2013. Modeling of Humanoid Systems Using Deductive Approach Miloš D Jovanović Robotics laboratory Mihailo Pupin Institute Belgrade, Serbia milos.jovanovic@pupin.rs Veljko
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo. Humanoid Robots 2: Dynamic Modeling
 Autonomous and Mobile Robotics rof. Giuseppe Oriolo Humanoid Robots 2: Dynamic Modeling modeling multi-body free floating complete model m j I j R j ω j f c j O z y x p ZM conceptual models for walking/balancing
Autonomous and Mobile Robotics rof. Giuseppe Oriolo Humanoid Robots 2: Dynamic Modeling modeling multi-body free floating complete model m j I j R j ω j f c j O z y x p ZM conceptual models for walking/balancing
Humanoid Robotics. Inverse Kinematics and Whole-Body Motion Planning. Maren Bennewitz
 Humanoid Robotics Inverse Kinematics and Whole-Body Motion Planning Maren Bennewitz 1 Motivation Planning for object manipulation Whole-body motion to reach a desired goal configuration Generate a sequence
Humanoid Robotics Inverse Kinematics and Whole-Body Motion Planning Maren Bennewitz 1 Motivation Planning for object manipulation Whole-body motion to reach a desired goal configuration Generate a sequence
Planning End Effector Trajectories for a Serially Linked, Floating-base Robot with Changing Support Polygon
 2014 American Control Conference (ACC) June 4-6, 2014. Portland, Oregon, USA Planning End Effector Trajectories for a Serially Linked, Floating-base Robot with Changing Support Polygon Ellen A. Cappo,
2014 American Control Conference (ACC) June 4-6, 2014. Portland, Oregon, USA Planning End Effector Trajectories for a Serially Linked, Floating-base Robot with Changing Support Polygon Ellen A. Cappo,
Control of Snake Like Robot for Locomotion and Manipulation
 Control of Snake Like Robot for Locomotion and Manipulation MYamakita 1,, Takeshi Yamada 1 and Kenta Tanaka 1 1 Tokyo Institute of Technology, -1-1 Ohokayama, Meguro-ku, Tokyo, Japan, yamakita@ctrltitechacjp
Control of Snake Like Robot for Locomotion and Manipulation MYamakita 1,, Takeshi Yamada 1 and Kenta Tanaka 1 1 Tokyo Institute of Technology, -1-1 Ohokayama, Meguro-ku, Tokyo, Japan, yamakita@ctrltitechacjp
Online Generation of Humanoid Walking Motion based on a Fast. The University of Tokyo, Tokyo, Japan,
 Online Generation of Humanoid Walking Motion based on a Fast Generation Method of Motion Pattern that Follows Desired ZMP Koichi Nishiwaki 1, Satoshi Kagami 2,Yasuo Kuniyoshi 1, Masayuki Inaba 1,Hirochika
Online Generation of Humanoid Walking Motion based on a Fast Generation Method of Motion Pattern that Follows Desired ZMP Koichi Nishiwaki 1, Satoshi Kagami 2,Yasuo Kuniyoshi 1, Masayuki Inaba 1,Hirochika
COPYRIGHTED MATERIAL INTRODUCTION CHAPTER 1
 CHAPTER 1 INTRODUCTION Modern mechanical and aerospace systems are often very complex and consist of many components interconnected by joints and force elements such as springs, dampers, and actuators.
CHAPTER 1 INTRODUCTION Modern mechanical and aerospace systems are often very complex and consist of many components interconnected by joints and force elements such as springs, dampers, and actuators.
Collision Detection. Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering
 RBE 550 MOTION PLANNING BASED ON DR. DMITRY BERENSON S RBE 550 Collision Detection Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Euler Angle RBE
RBE 550 MOTION PLANNING BASED ON DR. DMITRY BERENSON S RBE 550 Collision Detection Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Euler Angle RBE
Design and Optimization of the Thigh for an Exoskeleton based on Parallel Mechanism
 Design and Optimization of the Thigh for an Exoskeleton based on Parallel Mechanism Konstantin Kondak, Bhaskar Dasgupta, Günter Hommel Technische Universität Berlin, Institut für Technische Informatik
Design and Optimization of the Thigh for an Exoskeleton based on Parallel Mechanism Konstantin Kondak, Bhaskar Dasgupta, Günter Hommel Technische Universität Berlin, Institut für Technische Informatik
Introduction to Robotics
 Introduction to Robotics Ph.D. Antonio Marin-Hernandez Artificial Intelligence Department Universidad Veracruzana Sebastian Camacho # 5 Xalapa, Veracruz Robotics Action and Perception LAAS-CNRS 7, av du
Introduction to Robotics Ph.D. Antonio Marin-Hernandez Artificial Intelligence Department Universidad Veracruzana Sebastian Camacho # 5 Xalapa, Veracruz Robotics Action and Perception LAAS-CNRS 7, av du
Redundancy Resolution by Minimization of Joint Disturbance Torque for Independent Joint Controlled Kinematically Redundant Manipulators
 56 ICASE :The Institute ofcontrol,automation and Systems Engineering,KOREA Vol.,No.1,March,000 Redundancy Resolution by Minimization of Joint Disturbance Torque for Independent Joint Controlled Kinematically
56 ICASE :The Institute ofcontrol,automation and Systems Engineering,KOREA Vol.,No.1,March,000 Redundancy Resolution by Minimization of Joint Disturbance Torque for Independent Joint Controlled Kinematically
Robust Control of Bipedal Humanoid (TPinokio)
") Available online at www.sciencedirect.com Procedia Engineering 41 (2012 ) 643 649 International Symposium on Robotics and Intelligent Sensors 2012 (IRIS 2012) Robust Control of Bipedal Humanoid (TPinokio)
Available online at www.sciencedirect.com Procedia Engineering 41 (2012 ) 643 649 International Symposium on Robotics and Intelligent Sensors 2012 (IRIS 2012) Robust Control of Bipedal Humanoid (TPinokio)
An Optimal Planning of Falling Motions of a Humanoid Robot
 Proceedings of the 27 IEEE/RSJ International Conference on Intelligent Robots and Systems San Diego, CA, USA, Oct 29 - Nov 2, 27 TuB5.3 An Optimal Planning of Falling Motions of a Humanoid Robot Kiyoshi
Proceedings of the 27 IEEE/RSJ International Conference on Intelligent Robots and Systems San Diego, CA, USA, Oct 29 - Nov 2, 27 TuB5.3 An Optimal Planning of Falling Motions of a Humanoid Robot Kiyoshi
Planning human walk in virtual environments
 Planning human walk in virtual environments J. Pettré, T. Siméon, J.P. Laumond LAAS/CNRS, 7, avenue du Colonel Roche, 31077 Toulouse Cedex 04 - France {jpettre,nic,jpl}@laas.fr Abstract This paper presents
Planning human walk in virtual environments J. Pettré, T. Siméon, J.P. Laumond LAAS/CNRS, 7, avenue du Colonel Roche, 31077 Toulouse Cedex 04 - France {jpettre,nic,jpl}@laas.fr Abstract This paper presents
Nao Devils Dortmund. Team Description Paper for RoboCup Matthias Hofmann, Ingmar Schwarz, and Oliver Urbann
 Nao Devils Dortmund Team Description Paper for RoboCup 2017 Matthias Hofmann, Ingmar Schwarz, and Oliver Urbann Robotics Research Institute Section Information Technology TU Dortmund University 44221 Dortmund,
Nao Devils Dortmund Team Description Paper for RoboCup 2017 Matthias Hofmann, Ingmar Schwarz, and Oliver Urbann Robotics Research Institute Section Information Technology TU Dortmund University 44221 Dortmund,
Using the Generalized Inverted Pendulum to generate less energy-consuming trajectories for humanoid walking
 Using the Generalized Inverted Pendulum to generate less energy-consuming trajectories for humanoid walking Sahab Omran, Sophie Sakka, Yannick Aoustin To cite this version: Sahab Omran, Sophie Sakka, Yannick
Using the Generalized Inverted Pendulum to generate less energy-consuming trajectories for humanoid walking Sahab Omran, Sophie Sakka, Yannick Aoustin To cite this version: Sahab Omran, Sophie Sakka, Yannick
Anatomy of a Physics Engine. Erwin Coumans
 Anatomy of a Physics Engine Erwin Coumans erwin_coumans@playstation.sony.com How it fits together» Terminology» Rigid Body Dynamics» Collision Detection» Software Design Decisions» Trip through the Physics
Anatomy of a Physics Engine Erwin Coumans erwin_coumans@playstation.sony.com How it fits together» Terminology» Rigid Body Dynamics» Collision Detection» Software Design Decisions» Trip through the Physics
Applications. Human and animal motion Robotics control Hair Plants Molecular motion
 Multibody dynamics Applications Human and animal motion Robotics control Hair Plants Molecular motion Generalized coordinates Virtual work and generalized forces Lagrangian dynamics for mass points
Multibody dynamics Applications Human and animal motion Robotics control Hair Plants Molecular motion Generalized coordinates Virtual work and generalized forces Lagrangian dynamics for mass points
Experimental Evaluation of the Dynamic Simulation of Biped Walking of Humanoid Robots
 Proceedings of the 2003 IEEE International Conference on Robotics & Automation Taipei, Taiwan, September 14-19, 2003 Experimental Evaluation of the Dynamic Simulation of Biped Walking of Humanoid Robots
Proceedings of the 2003 IEEE International Conference on Robotics & Automation Taipei, Taiwan, September 14-19, 2003 Experimental Evaluation of the Dynamic Simulation of Biped Walking of Humanoid Robots
Lecture «Robot Dynamics»: Kinematic Control
 Lecture «Robot Dynamics»: Kinematic Control 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco Hutter,
Lecture «Robot Dynamics»: Kinematic Control 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco Hutter,
A Quantitative Stability Measure for Graspless Manipulation
 A Quantitative Stability Measure for Graspless Manipulation Yusuke MAEDA and Tamio ARAI Department of Precision Engineering, School of Engineering The University of Tokyo 7-3-1 Hongo, Bunkyo-ku, Tokyo
A Quantitative Stability Measure for Graspless Manipulation Yusuke MAEDA and Tamio ARAI Department of Precision Engineering, School of Engineering The University of Tokyo 7-3-1 Hongo, Bunkyo-ku, Tokyo
Intermediate Desired Value Approach for Continuous Transition among Multiple Tasks of Robots
 2 IEEE International Conference on Robotics and Automation Shanghai International Conference Center May 9-3, 2, Shanghai, China Intermediate Desired Value Approach for Continuous Transition among Multiple
2 IEEE International Conference on Robotics and Automation Shanghai International Conference Center May 9-3, 2, Shanghai, China Intermediate Desired Value Approach for Continuous Transition among Multiple
Serial Manipulator Statics. Robotics. Serial Manipulator Statics. Vladimír Smutný
 Serial Manipulator Statics Robotics Serial Manipulator Statics Vladimír Smutný Center for Machine Perception Czech Institute for Informatics, Robotics, and Cybernetics (CIIRC) Czech Technical University
Serial Manipulator Statics Robotics Serial Manipulator Statics Vladimír Smutný Center for Machine Perception Czech Institute for Informatics, Robotics, and Cybernetics (CIIRC) Czech Technical University
Jacobian: Velocities and Static Forces 1/4
 Jacobian: Velocities and Static Forces /4 Advanced Robotic - MAE 6D - Department of Mechanical & Aerospace Engineering - UCLA Kinematics Relations - Joint & Cartesian Spaces A robot is often used to manipulate
Jacobian: Velocities and Static Forces /4 Advanced Robotic - MAE 6D - Department of Mechanical & Aerospace Engineering - UCLA Kinematics Relations - Joint & Cartesian Spaces A robot is often used to manipulate
Humanoid Robotics. Inverse Kinematics and Whole-Body Motion Planning. Maren Bennewitz
 Humanoid Robotics Inverse Kinematics and Whole-Body Motion Planning Maren Bennewitz 1 Motivation Plan a sequence of configurations (vector of joint angle values) that let the robot move from its current
Humanoid Robotics Inverse Kinematics and Whole-Body Motion Planning Maren Bennewitz 1 Motivation Plan a sequence of configurations (vector of joint angle values) that let the robot move from its current
Variable-resolution Velocity Roadmap Generation Considering Safety Constraints for Mobile Robots
 Variable-resolution Velocity Roadmap Generation Considering Safety Constraints for Mobile Robots Jingyu Xiang, Yuichi Tazaki, Tatsuya Suzuki and B. Levedahl Abstract This research develops a new roadmap
Variable-resolution Velocity Roadmap Generation Considering Safety Constraints for Mobile Robots Jingyu Xiang, Yuichi Tazaki, Tatsuya Suzuki and B. Levedahl Abstract This research develops a new roadmap
Introduction to Robotics
 Université de Strasbourg Introduction to Robotics Bernard BAYLE, 2013 http://eavr.u-strasbg.fr/ bernard Modelling of a SCARA-type robotic manipulator SCARA-type robotic manipulators: introduction SCARA-type
Université de Strasbourg Introduction to Robotics Bernard BAYLE, 2013 http://eavr.u-strasbg.fr/ bernard Modelling of a SCARA-type robotic manipulator SCARA-type robotic manipulators: introduction SCARA-type
Inverse Kinematics for Humanoid Robots using Artificial Neural Networks
 Inverse Kinematics for Humanoid Robots using Artificial Neural Networks Javier de Lope, Rafaela González-Careaga, Telmo Zarraonandia, and Darío Maravall Department of Artificial Intelligence Faculty of
Inverse Kinematics for Humanoid Robots using Artificial Neural Networks Javier de Lope, Rafaela González-Careaga, Telmo Zarraonandia, and Darío Maravall Department of Artificial Intelligence Faculty of
Non-holonomic Planning
 Non-holonomic Planning Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Recap We have learned about RRTs. q new q init q near q rand But the standard
Non-holonomic Planning Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Recap We have learned about RRTs. q new q init q near q rand But the standard
Controlling Humanoid Robots with Human Motion Data: Experimental Validation
 21 IEEE-RAS International Conference on Humanoid Robots Nashville, TN, USA, December 6-8, 21 Controlling Humanoid Robots with Human Motion Data: Experimental Validation Katsu Yamane, Stuart O. Anderson,
21 IEEE-RAS International Conference on Humanoid Robots Nashville, TN, USA, December 6-8, 21 Controlling Humanoid Robots with Human Motion Data: Experimental Validation Katsu Yamane, Stuart O. Anderson,
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (3 pts) How to generate Delaunay Triangulation? (3 pts) Explain the difference
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (3 pts) How to generate Delaunay Triangulation? (3 pts) Explain the difference
Geometric Path Planning McGill COMP 765 Oct 12 th, 2017
 Geometric Path Planning McGill COMP 765 Oct 12 th, 2017 The Motion Planning Problem Intuition: Find a safe path/trajectory from start to goal More precisely: A path is a series of robot configurations
Geometric Path Planning McGill COMP 765 Oct 12 th, 2017 The Motion Planning Problem Intuition: Find a safe path/trajectory from start to goal More precisely: A path is a series of robot configurations