Motion Capture & Simulation
|
|
|
- Alyson Cain
- 6 years ago
- Views:
Transcription

1 Motion Capture & Simulation
2 Motion Capture
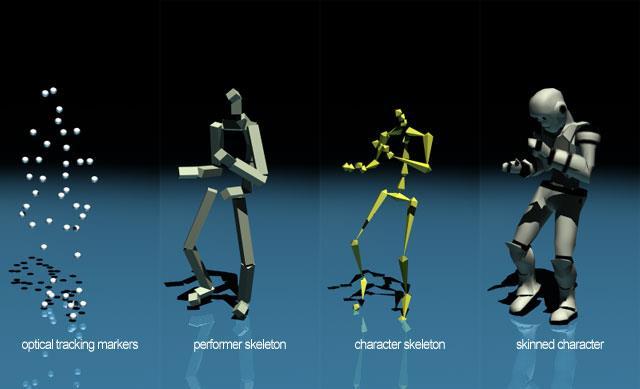
3 Character Reconstructions
4 Joint Angles Need 3 points to compute a rigid body coordinate frame 1 st point gives 3D translation, 2 nd point gives 2 angles, 3 rd point gives the last angle Label markers by hand, so the system knows which three points to use for each rigid body/bone If markers disappear (become occluded), have to re-label them after they show back up (extensive manual intervention) Once both rigid bodies associated with a joint are identified, the joint angle can be determined Note: Due to errors, neighboring bones may disagree in the location of the joint
5 MoCap Hardware

6 Mechanical Motion Capture Actors wear sensorized mechanical joints that directly measure the rotation of human joints Reduces manual intervention, but expensive and cumbersome


7 Wiimote Wiimote optical sensor images LEDs Distance between the LEDs on the is bar fixed Distance between imaged LEDs varies with depth These two distances allow one to calculate how far away the remote is from the LED bar The angle of the remote is calculated from the angle the imaged LEDs make on the optical sensor


8 Inertial Tracking Wiimote (accelerometer) and Wiimotion Plus (gyroscope) Actors can also wear accelerometers and gyroscopes Accelerometers measure linear acceleration Solve the usual system of ODEs with known accelerations to obtain velocity and position (errors cause drift) Gyroscope sensors measure the angular velocity Solve the usual ODE to obtain orientation (errors cause drift)


9 Magnetic Motion Capture Place emitters that produce three orthonormal magnetic fields Actors wear magnetic field detectors/receivers Receivers detect the field strength, which gets weaker based on distance In addition to the accelerometer and gyroscope, the PSMove uses a magnetometer (and the Earth s magnetic field) to correct for drift from solving ODEs Also uses a separate optical camera that measures the location, size, and orientation of the sphere (which becomes an ellipse when projected)


10 Marker-less Motion Capture Actors wear nothing! Use computer vision to reconstruct the person Do a scan of a person ahead of time, and identify key points Match key points between the video and the scan Microsoft Kinect - inexpensive depth sensor (from structured light)
11 MoCap Data
12 Mocap Output Root position/orientation vs. time Angles vs. time for all joints For example
13 Using Mocap Mocap data can be mapped to a CG avatar anywhere in the scene by adding an arbitrary translation to the root position vs. time graph Subsequently the avatar moves as the mocap data prescribes Ignoring errors in the process But what if, for example, we have mocap data for walking straight and prefer to follow a curved path? Could capture mocap data for every possible curved path, but that requires a lot of data Similarly, could capture mocap data for every possible speed of movement One also needs data for transitions between different radii of curvature, transitions between different speeds, and all combinations of curvature and speeds Even more data is required for characters of different heights, since the angles and angles versus time will be different Etc. Thus, many methods exist for using mocap data which doesn t exactly fit the task at hand

14 Mocap Examples
15 Modifying MoCap Data
16 Inverse Kinematics Suppose a foot misses the ground, or a hand fails to touch a cup Select a key frame in the mocap that has such an issue Use IK to adjust the end effector to meet the desired goal Treat the null space by minimizing the change in joint angles required to meet the goal Finally use this new key frame data to (smoothly?) modify the surrounding mocap data (angle vs. time graphs)
17 Inverse Kinematics Use various 1D interpolation techniques (e.g. splines) to ensure that the new function: goes through the new key pose modifies the original function as little as possible remains smooth Etc.
")

18 Motion Editing/Warping More generally one can specify new key frames to serve any purpose (motion editing) And then modify the 1D functions of angle vs. time to respect the newly edited key frames (motion warping)

19 Spacetime Constraints Instead of specifying key frames, specify a number of constraints or goals throughout the time of the motion Then use constrained space/time optimization to find a new motion The optimization penalizes missing goals as well as the distance from the initial mocap data Besides goals for end effectors, more general constraints may include energy minimization, grace, style, efficiency, quality, etc. Expensive!
20 MoCap Transitions

21 Motion Transitions Typically, an avatar executes many different kinds of motion Need ways to transition from one motion type to another
(1 s(t)) + B(t)s(t) A(t) is the angle vs. time graph for walking B(t) is the angle vs.")
22 Motion Blending Given two motions, say walking and running, how does one transition from walking to running? Use interpolation between the two motions: f t = A(t)(1 s(t)) + B(t)s(t) A(t) is the angle vs. time graph for walking B(t) is the angle vs. time graph for running f(t) is a new angle versus time graph that transitions from walking to running s(t) starts at 0 (walking) and at some point transitions to a value of 1 (running) Works ok in some cases Timings can be off, can look odd
23 Motion Graphs Automatically look for acceptable transition points between two separate motions Then cut, splice, and blend
24 MoCap & Simulation

25 Simulation Kinematically following mocap data gives the character infinite mass and inertia A little bit of physics can be added for realism

26 Interrupting Motion Capture If a character is given a small push, one can briefly simulate a reaction to collisions, etc., treating the character with finite mass After such a treatment, the character s state no longer matches that of the motion capture functions of angle vs. time Need to somehow recover Search for the closest motion capture frame to the current state and perform a motion graph transition
27 PD Control When an object is perturbed, keep targeting the current motion capture frame using a mass spring style formulation This gives a somewhat plausible transition back to the mocap angle vs. time functions from a perturbed state Apply a torque proportional to the difference between the current state and the target state Along with an additional damping torque proportional to the difference between the time derivatives ( angular velocities ) T = c P (q q d ) + c D ( qሶ qሶ d ) The larger the difference in the states, the bigger the torque The coefficients can be adjusted to more tightly or loosely follow the motion capture data
28 Rag Dolls The avatar can be simulated as an articulated rigid body Whether only for a brief collision, or for a longer period of time (e.g. falling down stairs) The articulated rigid body simulation would typically not be influenced by the motion capture data However, one could add a PD Control torque to the articulated rigid body simulation (as a non-physical, non-momentum conserving torque) in order to somewhat include the effects of mocap data in the simulation
29 Question #1 LONG FORM: Summarize motion capture technology. Answer the short form questions. SHORT FORM: Identify the main avatar in your game. How will the way it looks be compelling or relevant to the game? How will the way it moves be compelling or relevant to the game?
30 Articulated Rigid Bodies

31 Davy Jones

32 More than just characters

33 More than just characters
34 Maximal vs. Reduced Coordinates Broadly speaking, there are two ways of going about simulating articulated rigid bodies Maximal (Cartesian) Coordinates Simulate the full six degrees of freedom for each rigid body Use some auxiliary method to enforce joint constraints Contact, collision, friction, etc. are straightforward to include Reduced (Generalized) Coordinates Remove any degrees of freedom that are constrained away by joints write new differential equations for the position of the root and the joint angles) Faster to simulate, since there are less degrees of freedom Less intuitive equations, and less intuitive to incorporate contact, collision, friction and other unanticipated forces (but great for robots, since they re not supposed to have unanticipated forces)

35 Enforcing Constraints Consider constraining two separate rigid bodies together at a point Each of the rigid bodies describes this point in its own object space Thus we know the world space location of the two points that are supposed to be coincident The goal is to constrain them to actually be coincident For example one could attach a zero length spring connecting these two points, and simulate the effect of the spring forces on the rigid bodies
36 Fixing Drift Unless the zero length spring has infinite stiffness, which is difficult to simulate, the two points will drift somewhat apart This drift can be fixed at render time by projecting the current state of the rigid bodies into an acceptable joint state For example, each of the two bodies can be translated along the segment connecting their constrained points until those points are coincident In the case of a joint hierarchy one should only translate the rigid body further from the root A similar procedure can be employed for constraints on angles (which can be enforced using angular springs) Note: this may cause other visual issues such as interpenetrations One could maintain this new projected state as the new simulation state as well Although that then violates conservation of linear and angular momentum
37 Impulses for ARBs

38 Impulses Instead of using a spring to constrain the rigid bodies, one could use collision-style impulses Recall, an equal and opposite impulse is applied to each body using their impulse factors: u 1 new = u 1 + K 1 j and u 2 new = u 2 K 2 j The relative velocity u rel = u 1 u 2 should be identically zero after applying the impulse Solve u rel + K T j = 0 to find the impulse j The impulse is typically applied at the midpoint of the segment connecting the two points one is trying to keep coincident Unlike a spring that will fix the velocity and position, the impulse only fixes the velocity Thus, any position errors persist (creating drift that needs to be addressed)
39 Impulses for Drift During the position update, one could apply impulses to velocities in order to obtain velocities that close the gap That is, evolving the rigid bodies using these velocities results in the two points moving to become coincident (eliminating drift) Still use u new 1 = u 1 + K 1 j and u new 2 = u 2 K 2 j The new relative velocity u new rel is not set to zero, but rather to the correct velocity to close the gap Solve u rel + K T j = u new rel to find the impulse j Points on the rigid body move on nonlinear paths, since rigid bodies rotate and translate Thus, finding the correct relative velocity and impulse is difficult Requires a nonlinear solver, iterations, etc., but is doable After updating the position to remove drift, new impulses are needed in order to make the relative velocity zero as well (as per the last slide)

40 Angular Impulses for ARBs
41 Angular Impulse Recall: Equations for one body with collision location r p with respect to its center of mass: Mvҧ new = Mv ҧ + j Iω new = Iω + r p j Let the point of application (and thus r p ) go to infinity while j goes to zero with j τ = r p j remaining finite: Mvҧ new = Mv ҧ + 0 Iω new = Iω + j τ This angular impulse only effects the angular momentum and not the linear momentum: Mvҧ new = Mv ҧ + j Iω new = Iω + r p j + j τ
42 ҧ Angular Impulse The pointwise velocity gets additionally modified by the angular impulse: u new p = v new + ω new r p = vҧ new + r T p ω new u p new = v ҧ + j M + r p T ω + I 1 r p j + I 1 j τ u p new = u p + Kj + r p T I 1 j τ Similarly for the angular velocity: ω new = ω + I 1 r p j + I 1 j τ This gives us 2 vector valued equations for u p new and ω new in 2 vector valued unknowns j and j τ Thus we can target any velocity and angular velocity, constraining the joint together while also controlling its angle/rotation
43 Angular Impulse In addition to the relative velocity u rel = u 1 u 2 at the joint center, also consider the relative angular velocity ω rel = ω 1 ω 2 Equal and opposite impulses applied to each body: u new 1 = u 1 + K 1 j + r T 1 I 1 1 j τ u new 2 = u 2 K 2 j r T 2 I 1 2 j τ Equal and opposite angular impulses applied to each body: ω new 1 = ω 1 + I 1 1 r 1 j + I 1 1 j τ ω new 2 = ω 2 I 1 2 r 2 j I 1 2 j τ These equations can be combined and rewritten as: new = u rel + K T j + ( r T 1 I r T 2 I 1 2 ) j τ u rel ω new rel = ω rel + (I 1 1 r 1 + I 1 2 r 2 )j + (I I 1 2 ) j τ So given a desired relative velocity u new rel and a desired relative angular velocity ω new rel, we can solve for the impulse j and angular impulse j τ
Computer Animation and Visualisation. Lecture 3. Motion capture and physically-based animation of characters
 Computer Animation and Visualisation Lecture 3. Motion capture and physically-based animation of characters Character Animation There are three methods Create them manually Use real human / animal motions
Computer Animation and Visualisation Lecture 3. Motion capture and physically-based animation of characters Character Animation There are three methods Create them manually Use real human / animal motions
Lecture VI: Constraints and Controllers
 Lecture VI: Constraints and Controllers Motion Constraints In practice, no rigid body is free to move around on its own. Movement is constrained: wheels on a chair human body parts trigger of a gun opening
Lecture VI: Constraints and Controllers Motion Constraints In practice, no rigid body is free to move around on its own. Movement is constrained: wheels on a chair human body parts trigger of a gun opening
Human body animation. Computer Animation. Human Body Animation. Skeletal Animation
 Computer Animation Aitor Rovira March 2010 Human body animation Based on slides by Marco Gillies Human Body Animation Skeletal Animation Skeletal Animation (FK, IK) Motion Capture Motion Editing (retargeting,
Computer Animation Aitor Rovira March 2010 Human body animation Based on slides by Marco Gillies Human Body Animation Skeletal Animation Skeletal Animation (FK, IK) Motion Capture Motion Editing (retargeting,
Animation. Computer Graphics COMP 770 (236) Spring Instructor: Brandon Lloyd 4/23/07 1
 Spring Instructor: Brandon Lloyd 4/23/07 1") Animation Computer Graphics COMP 770 (236) Spring 2007 Instructor: Brandon Lloyd 4/23/07 1 Today s Topics Interpolation Forward and inverse kinematics Rigid body simulation Fluids Particle systems Behavioral
Animation Computer Graphics COMP 770 (236) Spring 2007 Instructor: Brandon Lloyd 4/23/07 1 Today s Topics Interpolation Forward and inverse kinematics Rigid body simulation Fluids Particle systems Behavioral
animation projects in digital art animation 2009 fabio pellacini 1
 animation projects in digital art animation 2009 fabio pellacini 1 animation shape specification as a function of time projects in digital art animation 2009 fabio pellacini 2 how animation works? flip
animation projects in digital art animation 2009 fabio pellacini 1 animation shape specification as a function of time projects in digital art animation 2009 fabio pellacini 2 how animation works? flip
Last Time? Inverse Kinematics. Today. Keyframing. Physically-Based Animation. Procedural Animation
 Last Time? Inverse Kinematics Navier-Stokes Equations Conservation of Momentum & Mass Incompressible Flow Today How do we animate? Keyframing Procedural Animation Physically-Based Animation Forward and
Last Time? Inverse Kinematics Navier-Stokes Equations Conservation of Momentum & Mass Incompressible Flow Today How do we animate? Keyframing Procedural Animation Physically-Based Animation Forward and
Lecture VI: Constraints and Controllers. Parts Based on Erin Catto s Box2D Tutorial
 Lecture VI: Constraints and Controllers Parts Based on Erin Catto s Box2D Tutorial Motion Constraints In practice, no rigid body is free to move around on its own. Movement is constrained: wheels on a
Lecture VI: Constraints and Controllers Parts Based on Erin Catto s Box2D Tutorial Motion Constraints In practice, no rigid body is free to move around on its own. Movement is constrained: wheels on a
COMP 175 COMPUTER GRAPHICS. Lecture 10: Animation. COMP 175: Computer Graphics March 12, Erik Anderson 08 Animation
 Lecture 10: Animation COMP 175: Computer Graphics March 12, 2018 1/37 Recap on Camera and the GL Matrix Stack } Go over the GL Matrix Stack 2/37 Topics in Animation } Physics (dynamics, simulation, mechanics)
Lecture 10: Animation COMP 175: Computer Graphics March 12, 2018 1/37 Recap on Camera and the GL Matrix Stack } Go over the GL Matrix Stack 2/37 Topics in Animation } Physics (dynamics, simulation, mechanics)
CS 231. Inverse Kinematics Intro to Motion Capture
 CS 231 Inverse Kinematics Intro to Motion Capture Representation 1) Skeleton Origin (root) Joint centers/ bones lengths 2) Keyframes Pos/Rot Root (x) Joint Angles (q) 3D characters Kinematics study of
CS 231 Inverse Kinematics Intro to Motion Capture Representation 1) Skeleton Origin (root) Joint centers/ bones lengths 2) Keyframes Pos/Rot Root (x) Joint Angles (q) 3D characters Kinematics study of
Last Time? Animation, Motion Capture, & Inverse Kinematics. Today. Keyframing. Physically-Based Animation. Procedural Animation
 Last Time? Animation, Motion Capture, & Inverse Kinematics Navier-Stokes Equations Conservation of Momentum & Mass Incompressible Flow Today How do we animate? Keyframing Procedural Animation Physically-Based
Last Time? Animation, Motion Capture, & Inverse Kinematics Navier-Stokes Equations Conservation of Momentum & Mass Incompressible Flow Today How do we animate? Keyframing Procedural Animation Physically-Based
Articulated Characters
 Articulated Characters Skeleton A skeleton is a framework of rigid body bones connected by articulated joints Used as an (invisible?) armature to position and orient geometry (usually surface triangles)
Articulated Characters Skeleton A skeleton is a framework of rigid body bones connected by articulated joints Used as an (invisible?) armature to position and orient geometry (usually surface triangles)
Controlling Reactive, Motion Capture-driven Simulated Characters
 Controlling Reactive, Motion Capture-driven Simulated Characters Victor B. Zordan University of California at Riverside Motion capture-driven simulations? Motivation: Unreal Havok Havok2 Motion capture
Controlling Reactive, Motion Capture-driven Simulated Characters Victor B. Zordan University of California at Riverside Motion capture-driven simulations? Motivation: Unreal Havok Havok2 Motion capture
CS 231. Inverse Kinematics Intro to Motion Capture. 3D characters. Representation. 1) Skeleton Origin (root) Joint centers/ bones lengths
 Skeleton Origin (root) Joint centers/ bones lengths") CS Inverse Kinematics Intro to Motion Capture Representation D characters ) Skeleton Origin (root) Joint centers/ bones lengths ) Keyframes Pos/Rot Root (x) Joint Angles (q) Kinematics study of static
CS Inverse Kinematics Intro to Motion Capture Representation D characters ) Skeleton Origin (root) Joint centers/ bones lengths ) Keyframes Pos/Rot Root (x) Joint Angles (q) Kinematics study of static
Last Time? Animation, Motion Capture, & Inverse Kinematics. Today. Keyframing. Physically-Based Animation. Procedural Animation
 Last Time? Animation, Motion Capture, & Inverse Kinematics Navier-Stokes Equations Conservation of Momentum & Mass Incompressible Flow Today How do we animate? Keyframing Procedural Animation Physically-Based
Last Time? Animation, Motion Capture, & Inverse Kinematics Navier-Stokes Equations Conservation of Momentum & Mass Incompressible Flow Today How do we animate? Keyframing Procedural Animation Physically-Based
Character Animation 1
 Character Animation 1 Overview Animation is a big topic We will concentrate on character animation as is used in many games today humans, animals, monsters, robots, etc. Character Representation A character
Character Animation 1 Overview Animation is a big topic We will concentrate on character animation as is used in many games today humans, animals, monsters, robots, etc. Character Representation A character
Animation Lecture 10 Slide Fall 2003
 Animation Lecture 10 Slide 1 6.837 Fall 2003 Conventional Animation Draw each frame of the animation great control tedious Reduce burden with cel animation layer keyframe inbetween cel panoramas (Disney
Animation Lecture 10 Slide 1 6.837 Fall 2003 Conventional Animation Draw each frame of the animation great control tedious Reduce burden with cel animation layer keyframe inbetween cel panoramas (Disney
Simulation. x i. x i+1. degrees of freedom equations of motion. Newtonian laws gravity. ground contact forces
 Dynamic Controllers Simulation x i Newtonian laws gravity ground contact forces x i+1. x degrees of freedom equations of motion Simulation + Control x i Newtonian laws gravity ground contact forces internal
Dynamic Controllers Simulation x i Newtonian laws gravity ground contact forces x i+1. x degrees of freedom equations of motion Simulation + Control x i Newtonian laws gravity ground contact forces internal
Computer Animation. Algorithms and Techniques. z< MORGAN KAUFMANN PUBLISHERS. Rick Parent Ohio State University AN IMPRINT OF ELSEVIER SCIENCE
 Computer Animation Algorithms and Techniques Rick Parent Ohio State University z< MORGAN KAUFMANN PUBLISHERS AN IMPRINT OF ELSEVIER SCIENCE AMSTERDAM BOSTON LONDON NEW YORK OXFORD PARIS SAN DIEGO SAN FRANCISCO
Computer Animation Algorithms and Techniques Rick Parent Ohio State University z< MORGAN KAUFMANN PUBLISHERS AN IMPRINT OF ELSEVIER SCIENCE AMSTERDAM BOSTON LONDON NEW YORK OXFORD PARIS SAN DIEGO SAN FRANCISCO
Manipulator trajectory planning
 Manipulator trajectory planning Václav Hlaváč Czech Technical University in Prague Faculty of Electrical Engineering Department of Cybernetics Czech Republic http://cmp.felk.cvut.cz/~hlavac Courtesy to
Manipulator trajectory planning Václav Hlaváč Czech Technical University in Prague Faculty of Electrical Engineering Department of Cybernetics Czech Republic http://cmp.felk.cvut.cz/~hlavac Courtesy to
Robots are built to accomplish complex and difficult tasks that require highly non-linear motions.
 Path and Trajectory specification Robots are built to accomplish complex and difficult tasks that require highly non-linear motions. Specifying the desired motion to achieve a specified goal is often a
Path and Trajectory specification Robots are built to accomplish complex and difficult tasks that require highly non-linear motions. Specifying the desired motion to achieve a specified goal is often a
Homework 2 Questions? Animation, Motion Capture, & Inverse Kinematics. Velocity Interpolation. Handing Free Surface with MAC
 Homework 2 Questions? Animation, Motion Capture, & Inverse Kinematics Velocity Interpolation Original image from Foster & Metaxas, 1996 In 2D: For each axis, find the 4 closest face velocity samples: Self-intersecting
Homework 2 Questions? Animation, Motion Capture, & Inverse Kinematics Velocity Interpolation Original image from Foster & Metaxas, 1996 In 2D: For each axis, find the 4 closest face velocity samples: Self-intersecting
Character Animation. Presented by: Pam Chow
 Character Animation Presented by: Pam Chow Overview Animation is a big topic We will concentrate on character animation as is used in many games today humans, animals, monsters, robots, etc. PLAZMO AND
Character Animation Presented by: Pam Chow Overview Animation is a big topic We will concentrate on character animation as is used in many games today humans, animals, monsters, robots, etc. PLAZMO AND
Lesson 1: Introduction to Pro/MECHANICA Motion
 Lesson 1: Introduction to Pro/MECHANICA Motion 1.1 Overview of the Lesson The purpose of this lesson is to provide you with a brief overview of Pro/MECHANICA Motion, also called Motion in this book. Motion
Lesson 1: Introduction to Pro/MECHANICA Motion 1.1 Overview of the Lesson The purpose of this lesson is to provide you with a brief overview of Pro/MECHANICA Motion, also called Motion in this book. Motion
A simple example. Assume we want to find the change in the rotation angles to get the end effector to G. Effect of changing s
 CENG 732 Computer Animation This week Inverse Kinematics (continued) Rigid Body Simulation Bodies in free fall Bodies in contact Spring 2006-2007 Week 5 Inverse Kinematics Physically Based Rigid Body Simulation
CENG 732 Computer Animation This week Inverse Kinematics (continued) Rigid Body Simulation Bodies in free fall Bodies in contact Spring 2006-2007 Week 5 Inverse Kinematics Physically Based Rigid Body Simulation
Animations. Hakan Bilen University of Edinburgh. Computer Graphics Fall Some slides are courtesy of Steve Marschner and Kavita Bala
 Animations Hakan Bilen University of Edinburgh Computer Graphics Fall 2017 Some slides are courtesy of Steve Marschner and Kavita Bala Animation Artistic process What are animators trying to do? What tools
Animations Hakan Bilen University of Edinburgh Computer Graphics Fall 2017 Some slides are courtesy of Steve Marschner and Kavita Bala Animation Artistic process What are animators trying to do? What tools
Applications. Systems. Motion capture pipeline. Biomechanical analysis. Graphics research
 Motion capture Applications Systems Motion capture pipeline Biomechanical analysis Graphics research Applications Computer animation Biomechanics Robotics Cinema Video games Anthropology What is captured?
Motion capture Applications Systems Motion capture pipeline Biomechanical analysis Graphics research Applications Computer animation Biomechanics Robotics Cinema Video games Anthropology What is captured?
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Control Part 4 Other control strategies These slides are devoted to two advanced control approaches, namely Operational space control Interaction
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Control Part 4 Other control strategies These slides are devoted to two advanced control approaches, namely Operational space control Interaction
Animation. Itinerary Computer Graphics Lecture 22
 15-462 Computer Graphics Lecture 22 Animation April 22, 2003 M. Ian Graham Carnegie Mellon University Itinerary Review Basic Animation Keyed Animation Motion Capture Physically-Based Animation Behavioral
15-462 Computer Graphics Lecture 22 Animation April 22, 2003 M. Ian Graham Carnegie Mellon University Itinerary Review Basic Animation Keyed Animation Motion Capture Physically-Based Animation Behavioral
Animation. Itinerary. What is Animation? What is Animation? Animation Methods. Modeling vs. Animation Computer Graphics Lecture 22
 15-462 Computer Graphics Lecture 22 Animation April 22, 2003 M. Ian Graham Carnegie Mellon University What is Animation? Making things move What is Animation? Consider a model with n parameters Polygon
15-462 Computer Graphics Lecture 22 Animation April 22, 2003 M. Ian Graham Carnegie Mellon University What is Animation? Making things move What is Animation? Consider a model with n parameters Polygon
CS770/870 Spring 2017 Animation Basics
 Preview CS770/870 Spring 2017 Animation Basics Related material Angel 6e: 1.1.3, 8.6 Thalman, N and D. Thalman, Computer Animation, Encyclopedia of Computer Science, CRC Press. Lasseter, J. Principles
Preview CS770/870 Spring 2017 Animation Basics Related material Angel 6e: 1.1.3, 8.6 Thalman, N and D. Thalman, Computer Animation, Encyclopedia of Computer Science, CRC Press. Lasseter, J. Principles
CS770/870 Spring 2017 Animation Basics
 CS770/870 Spring 2017 Animation Basics Related material Angel 6e: 1.1.3, 8.6 Thalman, N and D. Thalman, Computer Animation, Encyclopedia of Computer Science, CRC Press. Lasseter, J. Principles of traditional
CS770/870 Spring 2017 Animation Basics Related material Angel 6e: 1.1.3, 8.6 Thalman, N and D. Thalman, Computer Animation, Encyclopedia of Computer Science, CRC Press. Lasseter, J. Principles of traditional
To Do. History of Computer Animation. These Lectures. 2D and 3D Animation. Computer Animation. Foundations of Computer Graphics (Spring 2010)
") Foundations of Computer Graphics (Spring 2010) CS 184, Lecture 24: Animation http://inst.eecs.berkeley.edu/~cs184 To Do Submit HW 4 (today) Start working on HW 5 (can be simple add-on) Many slides courtesy
Foundations of Computer Graphics (Spring 2010) CS 184, Lecture 24: Animation http://inst.eecs.berkeley.edu/~cs184 To Do Submit HW 4 (today) Start working on HW 5 (can be simple add-on) Many slides courtesy
Animation. CS 465 Lecture 22
 Animation CS 465 Lecture 22 Animation Industry production process leading up to animation What animation is How animation works (very generally) Artistic process of animation Further topics in how it works
Animation CS 465 Lecture 22 Animation Industry production process leading up to animation What animation is How animation works (very generally) Artistic process of animation Further topics in how it works
Applications. Human and animal motion Robotics control Hair Plants Molecular motion
 Multibody dynamics Applications Human and animal motion Robotics control Hair Plants Molecular motion Generalized coordinates Virtual work and generalized forces Lagrangian dynamics for mass points
Multibody dynamics Applications Human and animal motion Robotics control Hair Plants Molecular motion Generalized coordinates Virtual work and generalized forces Lagrangian dynamics for mass points
Data-driven Approaches to Simulation (Motion Capture)
") 1 Data-driven Approaches to Simulation (Motion Capture) Ting-Chun Sun tingchun.sun@usc.edu Preface The lecture slides [1] are made by Jessica Hodgins [2], who is a professor in Computer Science Department
1 Data-driven Approaches to Simulation (Motion Capture) Ting-Chun Sun tingchun.sun@usc.edu Preface The lecture slides [1] are made by Jessica Hodgins [2], who is a professor in Computer Science Department
Announcements: Quiz. Animation, Motion Capture, & Inverse Kinematics. Last Time? Today: How do we Animate? Keyframing. Procedural Animation
 Announcements: Quiz Animation, Motion Capture, & Inverse Kinematics On Friday (3/1), in class One 8.5x11 sheet of notes allowed Sample quiz (from a previous year) on website Focus on reading comprehension
Announcements: Quiz Animation, Motion Capture, & Inverse Kinematics On Friday (3/1), in class One 8.5x11 sheet of notes allowed Sample quiz (from a previous year) on website Focus on reading comprehension
Animation, Motion Capture, & Inverse Kinematics. Announcements: Quiz
 Animation, Motion Capture, & Inverse Kinematics Announcements: Quiz On Tuesday (3/10), in class One 8.5x11 sheet of notes allowed Sample quiz (from a previous year) on website Focus on reading comprehension
Animation, Motion Capture, & Inverse Kinematics Announcements: Quiz On Tuesday (3/10), in class One 8.5x11 sheet of notes allowed Sample quiz (from a previous year) on website Focus on reading comprehension
Computer Animation Fundamentals. Animation Methods Keyframing Interpolation Kinematics Inverse Kinematics
 Computer Animation Fundamentals Animation Methods Keyframing Interpolation Kinematics Inverse Kinematics Lecture 21 6.837 Fall 2001 Conventional Animation Draw each frame of the animation great control
Computer Animation Fundamentals Animation Methods Keyframing Interpolation Kinematics Inverse Kinematics Lecture 21 6.837 Fall 2001 Conventional Animation Draw each frame of the animation great control
animation computer graphics animation 2009 fabio pellacini 1 animation shape specification as a function of time
 animation computer graphics animation 2009 fabio pellacini 1 animation shape specification as a function of time computer graphics animation 2009 fabio pellacini 2 animation representation many ways to
animation computer graphics animation 2009 fabio pellacini 1 animation shape specification as a function of time computer graphics animation 2009 fabio pellacini 2 animation representation many ways to
animation computer graphics animation 2009 fabio pellacini 1
 animation computer graphics animation 2009 fabio pellacini 1 animation shape specification as a function of time computer graphics animation 2009 fabio pellacini 2 animation representation many ways to
animation computer graphics animation 2009 fabio pellacini 1 animation shape specification as a function of time computer graphics animation 2009 fabio pellacini 2 animation representation many ways to
Motion Synthesis and Editing. Yisheng Chen
 Motion Synthesis and Editing Yisheng Chen Overview Data driven motion synthesis automatically generate motion from a motion capture database, offline or interactive User inputs Large, high-dimensional
Motion Synthesis and Editing Yisheng Chen Overview Data driven motion synthesis automatically generate motion from a motion capture database, offline or interactive User inputs Large, high-dimensional
Cloth Animation. CENG 732 Computer Animation. Simple Draping. Simple Draping. Simple Draping. Simple Draping
 Cloth Animation CENG 732 Computer Animation Cloth animation in Blender Cloth animation in Maya Spring 2006-2007 Week 9 Animating Cloth Motion Capture Draping will occur as a cloth is hanged from a fixed
Cloth Animation CENG 732 Computer Animation Cloth animation in Blender Cloth animation in Maya Spring 2006-2007 Week 9 Animating Cloth Motion Capture Draping will occur as a cloth is hanged from a fixed
Overview. Animation is a big topic We will concentrate on character animation as is used in many games today. humans, animals, monsters, robots, etc.
 ANIMATION Overview Animation is a big topic We will concentrate on character animation as is used in many games today humans, animals, monsters, robots, etc. Character Representation A character is represented
ANIMATION Overview Animation is a big topic We will concentrate on character animation as is used in many games today humans, animals, monsters, robots, etc. Character Representation A character is represented
Research Subject. Dynamics Computation and Behavior Capture of Human Figures (Nakamura Group)
") Research Subject Dynamics Computation and Behavior Capture of Human Figures (Nakamura Group) (1) Goal and summary Introduction Humanoid has less actuators than its movable degrees of freedom (DOF) which
Research Subject Dynamics Computation and Behavior Capture of Human Figures (Nakamura Group) (1) Goal and summary Introduction Humanoid has less actuators than its movable degrees of freedom (DOF) which
Character Animation COS 426
 Character Animation COS 426 Syllabus I. Image processing II. Modeling III. Rendering IV. Animation Image Processing (Rusty Coleman, CS426, Fall99) Rendering (Michael Bostock, CS426, Fall99) Modeling (Dennis
Character Animation COS 426 Syllabus I. Image processing II. Modeling III. Rendering IV. Animation Image Processing (Rusty Coleman, CS426, Fall99) Rendering (Michael Bostock, CS426, Fall99) Modeling (Dennis
Mapping optical motion capture data to skeletal motion using a physical model
 Mapping optical motion capture data to skeletal motion using a physical model Victor B. Zordan Nicholas C. Van Der Horst University of California, Riverside Motivation Motivation Optical data + Skeleton
Mapping optical motion capture data to skeletal motion using a physical model Victor B. Zordan Nicholas C. Van Der Horst University of California, Riverside Motivation Motivation Optical data + Skeleton
ROSE-HULMAN INSTITUTE OF TECHNOLOGY
 Introduction to Working Model Welcome to Working Model! What is Working Model? It's an advanced 2-dimensional motion simulation package with sophisticated editing capabilities. It allows you to build and
Introduction to Working Model Welcome to Working Model! What is Working Model? It's an advanced 2-dimensional motion simulation package with sophisticated editing capabilities. It allows you to build and
Simulation in Computer Graphics. Deformable Objects. Matthias Teschner. Computer Science Department University of Freiburg
 Simulation in Computer Graphics Deformable Objects Matthias Teschner Computer Science Department University of Freiburg Outline introduction forces performance collision handling visualization University
Simulation in Computer Graphics Deformable Objects Matthias Teschner Computer Science Department University of Freiburg Outline introduction forces performance collision handling visualization University
1 Trajectories. Class Notes, Trajectory Planning, COMS4733. Figure 1: Robot control system.
 Class Notes, Trajectory Planning, COMS4733 Figure 1: Robot control system. 1 Trajectories Trajectories are characterized by a path which is a space curve of the end effector. We can parameterize this curve
Class Notes, Trajectory Planning, COMS4733 Figure 1: Robot control system. 1 Trajectories Trajectories are characterized by a path which is a space curve of the end effector. We can parameterize this curve
PSE Game Physics. Session (3) Springs, Ropes, Linear Momentum and Rotations. Oliver Meister, Roland Wittmann
 Springs, Ropes, Linear Momentum and Rotations. Oliver Meister, Roland Wittmann") PSE Game Physics Session (3) Springs, Ropes, Linear Momentum and Rotations Oliver Meister, Roland Wittmann 08.05.2015 Session (3) Springs, Ropes, Linear Momentum and Rotations, 08.05.2015 1 Outline Springs
PSE Game Physics Session (3) Springs, Ropes, Linear Momentum and Rotations Oliver Meister, Roland Wittmann 08.05.2015 Session (3) Springs, Ropes, Linear Momentum and Rotations, 08.05.2015 1 Outline Springs
John Hsu Nate Koenig ROSCon 2012
 John Hsu Nate Koenig ROSCon 2012 Outline What is Gazebo, and why should you use it Overview and architecture Environment modeling Robot modeling Interfaces Getting Help Simulation for Robots Towards accurate
John Hsu Nate Koenig ROSCon 2012 Outline What is Gazebo, and why should you use it Overview and architecture Environment modeling Robot modeling Interfaces Getting Help Simulation for Robots Towards accurate
CS 231. Motion Capture Data I. The Pipeline. Bodenheimer et al
 CS 231 Motion Capture Data I The Pipeline Bodenheimer et al 1 Marker Magnetic Optical Marker placement On limbs vs joints neither is ideal Over tight clothing or thin skin In repeatable 'landmarks' Using
CS 231 Motion Capture Data I The Pipeline Bodenheimer et al 1 Marker Magnetic Optical Marker placement On limbs vs joints neither is ideal Over tight clothing or thin skin In repeatable 'landmarks' Using
Kinematics: Intro. Kinematics is study of motion
 Kinematics is study of motion Kinematics: Intro Concerned with mechanisms and how they transfer and transform motion Mechanisms can be machines, skeletons, etc. Important for CG since need to animate complex
Kinematics is study of motion Kinematics: Intro Concerned with mechanisms and how they transfer and transform motion Mechanisms can be machines, skeletons, etc. Important for CG since need to animate complex
To Do. Advanced Computer Graphics. The Story So Far. Course Outline. Rendering (Creating, shading images from geometry, lighting, materials)
") Advanced Computer Graphics CSE 190 [Spring 2015], Lecture 16 Ravi Ramamoorthi http://www.cs.ucsd.edu/~ravir To Do Assignment 3 milestone due May 29 Should already be well on way Contact us for difficulties
Advanced Computer Graphics CSE 190 [Spring 2015], Lecture 16 Ravi Ramamoorthi http://www.cs.ucsd.edu/~ravir To Do Assignment 3 milestone due May 29 Should already be well on way Contact us for difficulties
AMSTERDAM BOSTON HEIDELBERG LONDON NEW YORK OXFORD PARIS SAN DIEGO SAN FRANCISCO SINGAPORE SYDNEY TOKYO F ^ k.^
 Computer a jap Animation Algorithms and Techniques Second Edition Rick Parent Ohio State University AMSTERDAM BOSTON HEIDELBERG LONDON NEW YORK OXFORD PARIS SAN DIEGO SAN FRANCISCO SINGAPORE SYDNEY TOKYO
Computer a jap Animation Algorithms and Techniques Second Edition Rick Parent Ohio State University AMSTERDAM BOSTON HEIDELBERG LONDON NEW YORK OXFORD PARIS SAN DIEGO SAN FRANCISCO SINGAPORE SYDNEY TOKYO
Course Outline. Advanced Computer Graphics. Animation. The Story So Far. Animation. To Do
 Advanced Computer Graphics CSE 163 [Spring 2017], Lecture 18 Ravi Ramamoorthi http://www.cs.ucsd.edu/~ravir 3D Graphics Pipeline Modeling (Creating 3D Geometry) Course Outline Rendering (Creating, shading
Advanced Computer Graphics CSE 163 [Spring 2017], Lecture 18 Ravi Ramamoorthi http://www.cs.ucsd.edu/~ravir 3D Graphics Pipeline Modeling (Creating 3D Geometry) Course Outline Rendering (Creating, shading
Using RecurDyn. Contents
 Using RecurDyn Contents 1.0 Multibody Dynamics Overview... 2 2.0 Multibody Dynamics Applications... 3 3.0 What is RecurDyn and how is it different?... 4 4.0 Types of RecurDyn Analysis... 5 5.0 MBD Simulation
Using RecurDyn Contents 1.0 Multibody Dynamics Overview... 2 2.0 Multibody Dynamics Applications... 3 3.0 What is RecurDyn and how is it different?... 4 4.0 Types of RecurDyn Analysis... 5 5.0 MBD Simulation
Accurate 3D Face and Body Modeling from a Single Fixed Kinect
 Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Animation. CS 4620 Lecture 33. Cornell CS4620 Fall Kavita Bala
 Animation CS 4620 Lecture 33 Cornell CS4620 Fall 2015 1 Announcements Grading A5 (and A6) on Monday after TG 4621: one-on-one sessions with TA this Friday w/ prior instructor Steve Marschner 2 Quaternions
Animation CS 4620 Lecture 33 Cornell CS4620 Fall 2015 1 Announcements Grading A5 (and A6) on Monday after TG 4621: one-on-one sessions with TA this Friday w/ prior instructor Steve Marschner 2 Quaternions
Interactive Computer Graphics
 Interactive Computer Graphics Lecture 18 Kinematics and Animation Interactive Graphics Lecture 18: Slide 1 Animation of 3D models In the early days physical models were altered frame by frame to create
Interactive Computer Graphics Lecture 18 Kinematics and Animation Interactive Graphics Lecture 18: Slide 1 Animation of 3D models In the early days physical models were altered frame by frame to create
Anatomy of a Physics Engine. Erwin Coumans
 Anatomy of a Physics Engine Erwin Coumans erwin_coumans@playstation.sony.com How it fits together» Terminology» Rigid Body Dynamics» Collision Detection» Software Design Decisions» Trip through the Physics
Anatomy of a Physics Engine Erwin Coumans erwin_coumans@playstation.sony.com How it fits together» Terminology» Rigid Body Dynamics» Collision Detection» Software Design Decisions» Trip through the Physics
4 Kinematic Linkages. Chapter 4. Kinematic Linkages. Department of Computer Science and Engineering 4-1
 Kinematic Linkages 4-1 Introduction In describing an object s motion, it is often useful to relate it to another object. Consider, for eample a coordinate system centered at our sun in which the moon s
Kinematic Linkages 4-1 Introduction In describing an object s motion, it is often useful to relate it to another object. Consider, for eample a coordinate system centered at our sun in which the moon s
Kinematics and Orientations
 Kinematics and Orientations Hierarchies Forward Kinematics Transformations (review) Euler angles Quaternions Yaw and evaluation function for assignment 2 Building a character Just translate, rotate, and
Kinematics and Orientations Hierarchies Forward Kinematics Transformations (review) Euler angles Quaternions Yaw and evaluation function for assignment 2 Building a character Just translate, rotate, and
Introduction to Computer Graphics. Animation (1) May 19, 2016 Kenshi Takayama
 May 19, 2016 Kenshi Takayama") Introduction to Computer Graphics Animation (1) May 19, 2016 Kenshi Takayama Skeleton-based animation Simple Intuitive Low comp. cost https://www.youtube.com/watch?v=dsonab58qva 2 Representing a pose using
Introduction to Computer Graphics Animation (1) May 19, 2016 Kenshi Takayama Skeleton-based animation Simple Intuitive Low comp. cost https://www.youtube.com/watch?v=dsonab58qva 2 Representing a pose using
Practical Robotics (PRAC)
") Practical Robotics (PRAC) A Mobile Robot Navigation System (1) - Sensor and Kinematic Modelling Nick Pears University of York, Department of Computer Science December 17, 2014 nep (UoY CS) PRAC Practical
Practical Robotics (PRAC) A Mobile Robot Navigation System (1) - Sensor and Kinematic Modelling Nick Pears University of York, Department of Computer Science December 17, 2014 nep (UoY CS) PRAC Practical
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo. Humanoid Robots 2: Dynamic Modeling
 Autonomous and Mobile Robotics rof. Giuseppe Oriolo Humanoid Robots 2: Dynamic Modeling modeling multi-body free floating complete model m j I j R j ω j f c j O z y x p ZM conceptual models for walking/balancing
Autonomous and Mobile Robotics rof. Giuseppe Oriolo Humanoid Robots 2: Dynamic Modeling modeling multi-body free floating complete model m j I j R j ω j f c j O z y x p ZM conceptual models for walking/balancing
13. Learning Ballistic Movementsof a Robot Arm 212
 13. Learning Ballistic Movementsof a Robot Arm 212 13. LEARNING BALLISTIC MOVEMENTS OF A ROBOT ARM 13.1 Problem and Model Approach After a sufficiently long training phase, the network described in the
13. Learning Ballistic Movementsof a Robot Arm 212 13. LEARNING BALLISTIC MOVEMENTS OF A ROBOT ARM 13.1 Problem and Model Approach After a sufficiently long training phase, the network described in the
1. Introduction 1 2. Mathematical Representation of Robots
 1. Introduction 1 1.1 Introduction 1 1.2 Brief History 1 1.3 Types of Robots 7 1.4 Technology of Robots 9 1.5 Basic Principles in Robotics 12 1.6 Notation 15 1.7 Symbolic Computation and Numerical Analysis
1. Introduction 1 1.1 Introduction 1 1.2 Brief History 1 1.3 Types of Robots 7 1.4 Technology of Robots 9 1.5 Basic Principles in Robotics 12 1.6 Notation 15 1.7 Symbolic Computation and Numerical Analysis
Motion Capture. Motion Capture in Movies. Motion Capture in Games
 Motion Capture Motion Capture in Movies 2 Motion Capture in Games 3 4 Magnetic Capture Systems Tethered Sensitive to metal Low frequency (60Hz) Mechanical Capture Systems Any environment Measures joint
Motion Capture Motion Capture in Movies 2 Motion Capture in Games 3 4 Magnetic Capture Systems Tethered Sensitive to metal Low frequency (60Hz) Mechanical Capture Systems Any environment Measures joint
Rachel Weinstein, Joseph Teran and Ron Fedkiw
 Rachel Weinstein, Joseph Teran and Ron Fedkiw presented by Marco Bernasconi (mberna7@uic.edu) Politecnico di Milano A couple of questions: Why did I choose this paper? What does contact vs collision mean?
Rachel Weinstein, Joseph Teran and Ron Fedkiw presented by Marco Bernasconi (mberna7@uic.edu) Politecnico di Milano A couple of questions: Why did I choose this paper? What does contact vs collision mean?
Ragdoll Physics. Abstract. 2 Background. 1 Introduction. Gabe Mulley, Matt Bittarelli. April 25th, Previous Work
 Ragdoll Physics Gabe Mulley, Matt Bittarelli April 25th, 2007 Abstract The goal of this project was to create a real-time, interactive, and above all, stable, ragdoll physics simulation. This simulation
Ragdoll Physics Gabe Mulley, Matt Bittarelli April 25th, 2007 Abstract The goal of this project was to create a real-time, interactive, and above all, stable, ragdoll physics simulation. This simulation
Integrating Physics into a Modern Game Engine. Object Collision. Various types of collision for an object:
 Integrating Physics into a Modern Game Engine Object Collision Various types of collision for an object: Sphere Bounding box Convex hull based on rendered model List of convex hull(s) based on special
Integrating Physics into a Modern Game Engine Object Collision Various types of collision for an object: Sphere Bounding box Convex hull based on rendered model List of convex hull(s) based on special
Model Library Mechanics
 Model Library Mechanics Using the libraries Mechanics 1D (Linear), Mechanics 1D (Rotary), Modal System incl. ANSYS interface, and MBS Mechanics (3D) incl. CAD import via STL and the additional options
Model Library Mechanics Using the libraries Mechanics 1D (Linear), Mechanics 1D (Rotary), Modal System incl. ANSYS interface, and MBS Mechanics (3D) incl. CAD import via STL and the additional options
Kinematics & Motion Capture
 Lecture 27: Kinematics & Motion Capture Computer Graphics and Imaging UC Berkeley CS184/284A, Spring 2017 Forward Kinematics (Slides with James O Brien) Forward Kinematics Articulated skeleton Topology
Lecture 27: Kinematics & Motion Capture Computer Graphics and Imaging UC Berkeley CS184/284A, Spring 2017 Forward Kinematics (Slides with James O Brien) Forward Kinematics Articulated skeleton Topology
CSE452 Computer Graphics
 CSE452 Computer Graphics Lecture 19: From Morphing To Animation Capturing and Animating Skin Deformation in Human Motion, Park and Hodgins, SIGGRAPH 2006 CSE452 Lecture 19: From Morphing to Animation 1
CSE452 Computer Graphics Lecture 19: From Morphing To Animation Capturing and Animating Skin Deformation in Human Motion, Park and Hodgins, SIGGRAPH 2006 CSE452 Lecture 19: From Morphing to Animation 1
Computer Animation. Courtesy of Adam Finkelstein
 Computer Animation Courtesy of Adam Finkelstein Advertisement Computer Animation What is animation? o Make objects change over time according to scripted actions What is simulation? o Predict how objects
Computer Animation Courtesy of Adam Finkelstein Advertisement Computer Animation What is animation? o Make objects change over time according to scripted actions What is simulation? o Predict how objects
Animation by Adaptation Tutorial 1: Animation Basics
 Animation by Adaptation Tutorial 1: Animation Basics Michael Gleicher Graphics Group Department of Computer Sciences University of Wisconsin Madison http://www.cs.wisc.edu/graphics Outline Talk #1: Basics
Animation by Adaptation Tutorial 1: Animation Basics Michael Gleicher Graphics Group Department of Computer Sciences University of Wisconsin Madison http://www.cs.wisc.edu/graphics Outline Talk #1: Basics
Physically Based Character Animation
 15-464/15-664 Technical Animation April 2, 2013 Physically Based Character Animation Katsu Yamane Disney Research, Pittsburgh kyamane@disneyresearch.com Physically Based Character Animation Use physics
15-464/15-664 Technical Animation April 2, 2013 Physically Based Character Animation Katsu Yamane Disney Research, Pittsburgh kyamane@disneyresearch.com Physically Based Character Animation Use physics
MOTION CAPTURE DATA PROCESSING - MOTION EDITING / RETARGETING - MOTION CONTROL / GRAPH - INVERSE KINEMATIC. Alexandre Meyer Master Informatique
 1 MOTION CAPTURE DATA PROCESSING - MOTION EDITING / RETARGETING - MOTION CONTROL / GRAPH - INVERSE KINEMATIC Alexandre Meyer Master Informatique Overview: Motion data processing In this course Motion editing
1 MOTION CAPTURE DATA PROCESSING - MOTION EDITING / RETARGETING - MOTION CONTROL / GRAPH - INVERSE KINEMATIC Alexandre Meyer Master Informatique Overview: Motion data processing In this course Motion editing
MODELING AND HIERARCHY
 MODELING AND HIERARCHY Introduction Models are abstractions of the world both of the real world in which we live and of virtual worlds that we create with computers. We are all familiar with mathematical
MODELING AND HIERARCHY Introduction Models are abstractions of the world both of the real world in which we live and of virtual worlds that we create with computers. We are all familiar with mathematical
Serial Manipulator Statics. Robotics. Serial Manipulator Statics. Vladimír Smutný
 Serial Manipulator Statics Robotics Serial Manipulator Statics Vladimír Smutný Center for Machine Perception Czech Institute for Informatics, Robotics, and Cybernetics (CIIRC) Czech Technical University
Serial Manipulator Statics Robotics Serial Manipulator Statics Vladimír Smutný Center for Machine Perception Czech Institute for Informatics, Robotics, and Cybernetics (CIIRC) Czech Technical University
C O M P U T E R G R A P H I C S. Computer Animation. Guoying Zhao 1 / 66
 Computer Animation Guoying Zhao 1 / 66 Basic Elements of Computer Graphics Modeling construct the 3D model of the scene Rendering Render the 3D model, compute the color of each pixel. The color is related
Computer Animation Guoying Zhao 1 / 66 Basic Elements of Computer Graphics Modeling construct the 3D model of the scene Rendering Render the 3D model, compute the color of each pixel. The color is related
CS 775: Advanced Computer Graphics. Lecture 17 : Motion Capture
 CS 775: Advanced Computer Graphics Lecture 17 : History Study of human motion Leonardo da Vinci (1452 1519) History Study of human motion Edward J. Muybridge, 1830 1904 http://en.wikipedia.org/wiki/eadweard_muybridge
CS 775: Advanced Computer Graphics Lecture 17 : History Study of human motion Leonardo da Vinci (1452 1519) History Study of human motion Edward J. Muybridge, 1830 1904 http://en.wikipedia.org/wiki/eadweard_muybridge
Thiruvarangan Ramaraj CS525 Graphics & Scientific Visualization Spring 2007, Presentation I, February 28 th 2007, 14:10 15:00. Topic (Research Paper):
:") Thiruvarangan Ramaraj CS525 Graphics & Scientific Visualization Spring 2007, Presentation I, February 28 th 2007, 14:10 15:00 Topic (Research Paper): Jinxian Chai and Jessica K. Hodgins, Performance Animation
Thiruvarangan Ramaraj CS525 Graphics & Scientific Visualization Spring 2007, Presentation I, February 28 th 2007, 14:10 15:00 Topic (Research Paper): Jinxian Chai and Jessica K. Hodgins, Performance Animation
Motion Control Methods for Skeleton Daniel Thalmann
 Motion Control Methods for Skeleton Daniel Thalmann Cagliari, May 2008 Animation of articulated bodies Characters, humans, animals, robots. Characterized by hierarchical structure: skeleton. Skeleton:
Motion Control Methods for Skeleton Daniel Thalmann Cagliari, May 2008 Animation of articulated bodies Characters, humans, animals, robots. Characterized by hierarchical structure: skeleton. Skeleton:
FAB verses tradition camera-based motion capture systems
 FAB verses tradition camera-based motion capture systems The advent of micromachined inertial sensors, such as rate gyroscopes and accelerometers, has made new navigation and tracking technologies possible.
FAB verses tradition camera-based motion capture systems The advent of micromachined inertial sensors, such as rate gyroscopes and accelerometers, has made new navigation and tracking technologies possible.
KINEMATICS FOR ANIMATION. Rémi Ronfard, Animation, M2R MOSIG
 KINEMATICS FOR ANIMATION Rémi Ronfard, Animation, M2R MOSIG Direct and inverse kinematics in animation Fast numerical methods for inverse kinematics by Bill Baxter My Adventures with Inverse Kinematics
KINEMATICS FOR ANIMATION Rémi Ronfard, Animation, M2R MOSIG Direct and inverse kinematics in animation Fast numerical methods for inverse kinematics by Bill Baxter My Adventures with Inverse Kinematics
How to Model Friction in SIMPACK
 How to Model Friction in SIMPACK 1. General Modelling friction in multi-body systems is somewhat challenging. The friction law itself is a simple function, see figure. However, if the relative velocity
How to Model Friction in SIMPACK 1. General Modelling friction in multi-body systems is somewhat challenging. The friction law itself is a simple function, see figure. However, if the relative velocity
12.1 Quaternions and Rotations
 Fall 2015 CSCI 420 Computer Graphics 12.1 Quaternions and Rotations Hao Li http://cs420.hao-li.com 1 Rotations Very important in computer animation and robotics Joint angles, rigid body orientations, camera
Fall 2015 CSCI 420 Computer Graphics 12.1 Quaternions and Rotations Hao Li http://cs420.hao-li.com 1 Rotations Very important in computer animation and robotics Joint angles, rigid body orientations, camera
Table of Contents. Chapter 1. Modeling and Identification of Serial Robots... 1 Wisama KHALIL and Etienne DOMBRE
 Chapter 1. Modeling and Identification of Serial Robots.... 1 Wisama KHALIL and Etienne DOMBRE 1.1. Introduction... 1 1.2. Geometric modeling... 2 1.2.1. Geometric description... 2 1.2.2. Direct geometric
Chapter 1. Modeling and Identification of Serial Robots.... 1 Wisama KHALIL and Etienne DOMBRE 1.1. Introduction... 1 1.2. Geometric modeling... 2 1.2.1. Geometric description... 2 1.2.2. Direct geometric
MCE/EEC 647/747: Robot Dynamics and Control. Lecture 1: Introduction
 MCE/EEC 647/747: Robot Dynamics and Control Lecture 1: Introduction Reading: SHV Chapter 1 Robotics and Automation Handbook, Chapter 1 Assigned readings from several articles. Cleveland State University
MCE/EEC 647/747: Robot Dynamics and Control Lecture 1: Introduction Reading: SHV Chapter 1 Robotics and Automation Handbook, Chapter 1 Assigned readings from several articles. Cleveland State University
CMSC 425: Lecture 10 Skeletal Animation and Skinning
 CMSC 425: Lecture 10 Skeletal Animation and Skinning Reading: Chapt 11 of Gregory, Game Engine Architecture. Recap: Last time we introduced the principal elements of skeletal models and discussed forward
CMSC 425: Lecture 10 Skeletal Animation and Skinning Reading: Chapt 11 of Gregory, Game Engine Architecture. Recap: Last time we introduced the principal elements of skeletal models and discussed forward
Course Review. Computer Animation and Visualisation. Taku Komura
 Course Review Computer Animation and Visualisation Taku Komura Characters include Human models Virtual characters Animal models Representation of postures The body has a hierarchical structure Many types
Course Review Computer Animation and Visualisation Taku Komura Characters include Human models Virtual characters Animal models Representation of postures The body has a hierarchical structure Many types
Chapter 4 Dynamics. Part Constrained Kinematics and Dynamics. Mobile Robotics - Prof Alonzo Kelly, CMU RI
 Chapter 4 Dynamics Part 2 4.3 Constrained Kinematics and Dynamics 1 Outline 4.3 Constrained Kinematics and Dynamics 4.3.1 Constraints of Disallowed Direction 4.3.2 Constraints of Rolling without Slipping
Chapter 4 Dynamics Part 2 4.3 Constrained Kinematics and Dynamics 1 Outline 4.3 Constrained Kinematics and Dynamics 4.3.1 Constraints of Disallowed Direction 4.3.2 Constraints of Rolling without Slipping
3D Human Motion Analysis and Manifolds
 D E P A R T M E N T O F C O M P U T E R S C I E N C E U N I V E R S I T Y O F C O P E N H A G E N 3D Human Motion Analysis and Manifolds Kim Steenstrup Pedersen DIKU Image group and E-Science center Motivation
D E P A R T M E N T O F C O M P U T E R S C I E N C E U N I V E R S I T Y O F C O P E N H A G E N 3D Human Motion Analysis and Manifolds Kim Steenstrup Pedersen DIKU Image group and E-Science center Motivation
DYNAMICS FOR ANIMATION. Rémi Ronfard, Animation, M2R MOSIG
 DYNAMICS FOR ANIMATION Rémi Ronfard, Animation, M2R MOSIG Summary of physics-based animation Motivation Newton s Laws Point-mass models Rigid and articulated bodies Ragdoll physics From kinematics to dynamics
DYNAMICS FOR ANIMATION Rémi Ronfard, Animation, M2R MOSIG Summary of physics-based animation Motivation Newton s Laws Point-mass models Rigid and articulated bodies Ragdoll physics From kinematics to dynamics
Cloth Simulation. Tanja Munz. Master of Science Computer Animation and Visual Effects. CGI Techniques Report
 Cloth Simulation CGI Techniques Report Tanja Munz Master of Science Computer Animation and Visual Effects 21st November, 2014 Abstract Cloth simulation is a wide and popular area of research. First papers
Cloth Simulation CGI Techniques Report Tanja Munz Master of Science Computer Animation and Visual Effects 21st November, 2014 Abstract Cloth simulation is a wide and popular area of research. First papers
Model-Based Human Motion Capture from Monocular Video Sequences
 Model-Based Human Motion Capture from Monocular Video Sequences Jihun Park 1, Sangho Park 2, and J.K. Aggarwal 2 1 Department of Computer Engineering Hongik University Seoul, Korea jhpark@hongik.ac.kr
Model-Based Human Motion Capture from Monocular Video Sequences Jihun Park 1, Sangho Park 2, and J.K. Aggarwal 2 1 Department of Computer Engineering Hongik University Seoul, Korea jhpark@hongik.ac.kr
Robotics and Autonomous Systems
 Robotics and Autonomous Systems Lecture 6: Perception/Odometry Terry Payne Department of Computer Science University of Liverpool 1 / 47 Today We ll talk about perception and motor control. 2 / 47 Perception
Robotics and Autonomous Systems Lecture 6: Perception/Odometry Terry Payne Department of Computer Science University of Liverpool 1 / 47 Today We ll talk about perception and motor control. 2 / 47 Perception
Robotics and Autonomous Systems
 Robotics and Autonomous Systems Lecture 6: Perception/Odometry Simon Parsons Department of Computer Science University of Liverpool 1 / 47 Today We ll talk about perception and motor control. 2 / 47 Perception
Robotics and Autonomous Systems Lecture 6: Perception/Odometry Simon Parsons Department of Computer Science University of Liverpool 1 / 47 Today We ll talk about perception and motor control. 2 / 47 Perception