CS6670: Computer Vision
|
|
|
- Maryann Newman
- 5 years ago
- Views:
Transcription
1 CS6670: Computer Vision Noah Snavely Lecture 19: Graph Cuts source S sink T
2 Readings Szeliski, Chapter



")
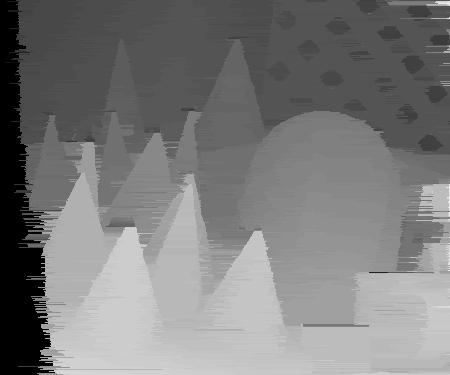
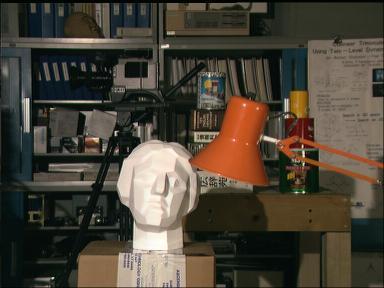
3 Stereo results with window search problems in areas of uniform texture Window-based matching (best window size) Ground truth

4 Can we do better? What defines a good stereo correspondence? 1. Match quality Want each pixel to find a good match in the other image 2. Smoothness two adjacent pixels should (usually) move about the same amount
 move about the same")
5 { { Stereo as energy minimization Better objective function match cost Want each pixel to find a good match in the other image smoothness cost Adjacent pixels should (usually) move about the same amount
6 Dynamic programming Can minimize this independently per scanline using dynamic programming (DP) : minimum cost of solution such that d(x,y) = d


7 Dynamic Programming
8 Stereo as a minimization problem The 2D problem has many local minima Gradient descent doesn t work well Simulated annealing works a little better And a large search space n x m image w/ k disparities has k nm possible solutions Finding the global minimum is NP-hard Good approximations exist


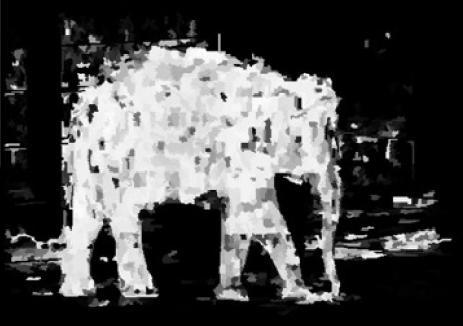
9 First: denoising Suppose we want to find a bright object against a bright background, given a noisy image Input Best thresholded images



10 Second: binary segmentation Suppose we want to segment an image into foreground and background
11 { { Binary segmentation as energy minimization Define a labeling L as an assignment of each pixel with a 0-1 label (background or foreground) Problem statement: find the labeling L that minimizes match cost ( how similar is each labeled pixel to the foreground / background? ) smoothness cost

12 : distance from pixel to background pixels : distance from pixel to foreground pixels { usually computed by creating a color model from user-labeled pixels


13

14 Neighboring pixels should generally have the same labels Unless the pixels have very different intensities : similarity in intensity of p and q = 10.0 = 0.1 (can use the same trick for stereo)
15 Binary segmentation as energy minimization For this problem, we can quickly find the globally optimal labelling! Use max flow / min cut algorithm

16 Graph min cut problem Given a weighted graph G with source and sink nodes (s and t), partition the nodes into two sets, S and T such that the sum of edge weights spanning the partition is minimized and s S and t T
17 Segmentation by min cut min cut t ( background ) s ( foreground ) Graph node for each pixel, link between adjacent pixels specify a few pixels as foreground and background create an infinite cost link from each bg pixel to the t node create an infinite cost link from each fg pixel to the s node create finite cost links from s and t to each other node compute min cut that separates s from t The min-cut max-flow theorem [Ford and Fulkerson 1956]
18 Segmentation by min cut min cut t s The partitions S and T formed by the min cut give the optimal foreground and background segmentation I.e., the resulting labels minimize
19 Stereo as energy minimization match cost: smoothness cost: : set of neighboring pixels 4-connected neighborhood 8-connected neighborhood
20 Smoothness cost last time: one possibility: quadratic and truncated quadratic models for V L 1 distance Potts model
21 Stereo as a labeling problem Can formulate as a (no longer binary) labeling problem with one label per disparity Can create similar setup as with segmentation, but with k source/sink nodes k = number of disparities Multi-source network flow problem Using the Potts model, the setup is straightforward
22 Energy minimization via graph cuts d 3 d 2 d 1 Graph Cut Delete enough edges so that each pixel is connected to exactly one label node Cost of a cut: sum of deleted edge weights Finding min cost cut equivalent to finding global minimum of energy function
23 Energy minimization via graph cuts edge weight d 3 d 2 d 1 Labels (disparities) edge weight
24 Computing a multiway cut With 2 labels: classical min-cut problem Solvable by standard flow algorithms polynomial time in theory, nearly linear in practice More than 2 terminals: NP-hard [Dahlhaus et al., STOC 92+ Efficient approximation algorithms exist Boykov, Veksler and Zabih, Fast Approximate Energy Minimization via Graph Cuts, ICCV Within a factor of 2 of optimal Computes local minimum in a strong sense even very large moves will not improve the energy


25 Move examples Idea: convert multi-way cut into a sequence of binary cut problems Red-blue swap move Starting point Green expansion move
26 The swap move algorithm 1. Start with an arbitrary labeling 2. Cycle through every label pair (A,B) in some order 2.1 Find the lowest E labeling within a single AB-swap 2.2 Go there if it s lower E than the current labeling 3. If E did not decrease in the cycle, we re done Otherwise, go to step 2 B A B A Original graph AB subgraph (run min-cut on this graph)
27 Results with window correlation normalized correlation (best window size) ground truth
28 Results with graph cuts graph cuts (Potts model, expansion move algorithm) ground truth
29 Other energy functions Can optimize other functions (exactly or approximately) with graph cuts
30 Questions?

31 Graph cuts in vision and graphics Texture synthesis Graphcut textures, *Kwatra, et al., 2003]

32 Interactive Digital Photo Montage

33
34 Other uses of graph cuts M. Uyttendaele, A. Eden, and R. Szeliski. Eliminating ghosting and exposure artifacts in image mosaics. In Proceedings of the Interational Conference on Computer Vision and Pattern Recognition, volume 2, pages , Kauai, Hawaii, December 2001.

35 Other uses of graph cuts M. Uyttendaele, A. Eden, and R. Szeliski. Eliminating ghosting and exposure artifacts in image mosaics. In Proceedings of the Interational Conference on Computer Vision and Pattern Recognition, volume 2, pages , Kauai, Hawaii, December 2001.
What have we leaned so far?
 What have we leaned so far? Camera structure Eye structure Project 1: High Dynamic Range Imaging What have we learned so far? Image Filtering Image Warping Camera Projection Model Project 2: Panoramic
What have we leaned so far? Camera structure Eye structure Project 1: High Dynamic Range Imaging What have we learned so far? Image Filtering Image Warping Camera Projection Model Project 2: Panoramic
CS4670 / 5670: Computer Vision Noah Snavely
 { { 11/26/2013 CS4670 / 5670: Computer Vision Noah Snavely Graph-Based Image Segmentation Stereo as a minimization problem match cost Want each pixel to find a good match in the other image smoothness
{ { 11/26/2013 CS4670 / 5670: Computer Vision Noah Snavely Graph-Based Image Segmentation Stereo as a minimization problem match cost Want each pixel to find a good match in the other image smoothness
CS4670: Computer Vision
 CS4670: Computer Vision Noah Snavely Lecture 34: Segmentation From Sandlot Science Announcements In-class exam this Friday, December 3 Review session in class on Wednesday Final projects: Slides due: Sunday,
CS4670: Computer Vision Noah Snavely Lecture 34: Segmentation From Sandlot Science Announcements In-class exam this Friday, December 3 Review session in class on Wednesday Final projects: Slides due: Sunday,
CS4495/6495 Introduction to Computer Vision. 3B-L3 Stereo correspondence
 CS4495/6495 Introduction to Computer Vision 3B-L3 Stereo correspondence For now assume parallel image planes Assume parallel (co-planar) image planes Assume same focal lengths Assume epipolar lines are
CS4495/6495 Introduction to Computer Vision 3B-L3 Stereo correspondence For now assume parallel image planes Assume parallel (co-planar) image planes Assume same focal lengths Assume epipolar lines are
Prof. Feng Liu. Spring /17/2017. With slides by F. Durand, Y.Y. Chuang, R. Raskar, and C.
 Prof. Feng Liu Spring 2017 http://www.cs.pdx.edu/~fliu/courses/cs510/ 05/17/2017 With slides by F. Durand, Y.Y. Chuang, R. Raskar, and C. Rother Last Time Image segmentation Normalized cut and segmentation
Prof. Feng Liu Spring 2017 http://www.cs.pdx.edu/~fliu/courses/cs510/ 05/17/2017 With slides by F. Durand, Y.Y. Chuang, R. Raskar, and C. Rother Last Time Image segmentation Normalized cut and segmentation
Lecture 16 Segmentation and Scene understanding
 Lecture 16 Segmentation and Scene understanding Introduction! Mean-shift! Graph-based segmentation! Top-down segmentation! Silvio Savarese Lecture 15 -! 3-Mar-14 Segmentation Silvio Savarese Lecture 15
Lecture 16 Segmentation and Scene understanding Introduction! Mean-shift! Graph-based segmentation! Top-down segmentation! Silvio Savarese Lecture 15 -! 3-Mar-14 Segmentation Silvio Savarese Lecture 15
Models for grids. Computer vision: models, learning and inference. Multi label Denoising. Binary Denoising. Denoising Goal.
 Models for grids Computer vision: models, learning and inference Chapter 9 Graphical Models Consider models where one unknown world state at each pixel in the image takes the form of a grid. Loops in the
Models for grids Computer vision: models, learning and inference Chapter 9 Graphical Models Consider models where one unknown world state at each pixel in the image takes the form of a grid. Loops in the
s-t Graph Cuts for Binary Energy Minimization
 s-t Graph Cuts for Binary Energy Minimization E data term ( L) = D ( ) + ( ) P Lp λ Ι Lp Lq p prior term Now that we have an energy function, the big question is how do we minimize it? pq N n Exhaustive
s-t Graph Cuts for Binary Energy Minimization E data term ( L) = D ( ) + ( ) P Lp λ Ι Lp Lq p prior term Now that we have an energy function, the big question is how do we minimize it? pq N n Exhaustive
Discrete Optimization Methods in Computer Vision CSE 6389 Slides by: Boykov Modified and Presented by: Mostafa Parchami Basic overview of graph cuts
 Discrete Optimization Methods in Computer Vision CSE 6389 Slides by: Boykov Modified and Presented by: Mostafa Parchami Basic overview of graph cuts [Yuri Boykov, Olga Veksler, Ramin Zabih, Fast Approximation
Discrete Optimization Methods in Computer Vision CSE 6389 Slides by: Boykov Modified and Presented by: Mostafa Parchami Basic overview of graph cuts [Yuri Boykov, Olga Veksler, Ramin Zabih, Fast Approximation
Computer Vision : Exercise 4 Labelling Problems
 Computer Vision Exercise 4 Labelling Problems 13/01/2014 Computer Vision : Exercise 4 Labelling Problems Outline 1. Energy Minimization (example segmentation) 2. Iterated Conditional Modes 3. Dynamic Programming
Computer Vision Exercise 4 Labelling Problems 13/01/2014 Computer Vision : Exercise 4 Labelling Problems Outline 1. Energy Minimization (example segmentation) 2. Iterated Conditional Modes 3. Dynamic Programming
intro, applications MRF, labeling... how it can be computed at all? Applications in segmentation: GraphCut, GrabCut, demos
 Image as Markov Random Field and Applications 1 Tomáš Svoboda, svoboda@cmp.felk.cvut.cz Czech Technical University in Prague, Center for Machine Perception http://cmp.felk.cvut.cz Talk Outline Last update:
Image as Markov Random Field and Applications 1 Tomáš Svoboda, svoboda@cmp.felk.cvut.cz Czech Technical University in Prague, Center for Machine Perception http://cmp.felk.cvut.cz Talk Outline Last update:
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Binocular stereo. Given a calibrated binocular stereo pair, fuse it to produce a depth image. Where does the depth information come from?
 Binocular Stereo Binocular stereo Given a calibrated binocular stereo pair, fuse it to produce a depth image Where does the depth information come from? Binocular stereo Given a calibrated binocular stereo
Binocular Stereo Binocular stereo Given a calibrated binocular stereo pair, fuse it to produce a depth image Where does the depth information come from? Binocular stereo Given a calibrated binocular stereo
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely, Zhengqi Li Stereo Single image stereogram, by Niklas Een Mark Twain at Pool Table", no date, UCR Museum of Photography Stereo Given two images from different viewpoints
CS5670: Computer Vision Noah Snavely, Zhengqi Li Stereo Single image stereogram, by Niklas Een Mark Twain at Pool Table", no date, UCR Museum of Photography Stereo Given two images from different viewpoints
Fast Approximate Energy Minimization via Graph Cuts
 IEEE Transactions on PAMI, vol. 23, no. 11, pp. 1222-1239 p.1 Fast Approximate Energy Minimization via Graph Cuts Yuri Boykov, Olga Veksler and Ramin Zabih Abstract Many tasks in computer vision involve
IEEE Transactions on PAMI, vol. 23, no. 11, pp. 1222-1239 p.1 Fast Approximate Energy Minimization via Graph Cuts Yuri Boykov, Olga Veksler and Ramin Zabih Abstract Many tasks in computer vision involve
Interactive segmentation, Combinatorial optimization. Filip Malmberg
 Interactive segmentation, Combinatorial optimization Filip Malmberg But first... Implementing graph-based algorithms Even if we have formulated an algorithm on a general graphs, we do not neccesarily have
Interactive segmentation, Combinatorial optimization Filip Malmberg But first... Implementing graph-based algorithms Even if we have formulated an algorithm on a general graphs, we do not neccesarily have
Fundamental matrix. Let p be a point in left image, p in right image. Epipolar relation. Epipolar mapping described by a 3x3 matrix F
 Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix F Fundamental
Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix F Fundamental
Multi-Label Moves for Multi-Label Energies
 Multi-Label Moves for Multi-Label Energies Olga Veksler University of Western Ontario some work is joint with Olivier Juan, Xiaoqing Liu, Yu Liu Outline Review multi-label optimization with graph cuts
Multi-Label Moves for Multi-Label Energies Olga Veksler University of Western Ontario some work is joint with Olivier Juan, Xiaoqing Liu, Yu Liu Outline Review multi-label optimization with graph cuts
CAP5415-Computer Vision Lecture 13-Image/Video Segmentation Part II. Dr. Ulas Bagci
 CAP-Computer Vision Lecture -Image/Video Segmentation Part II Dr. Ulas Bagci bagci@ucf.edu Labeling & Segmentation Labeling is a common way for modeling various computer vision problems (e.g. optical flow,
CAP-Computer Vision Lecture -Image/Video Segmentation Part II Dr. Ulas Bagci bagci@ucf.edu Labeling & Segmentation Labeling is a common way for modeling various computer vision problems (e.g. optical flow,
Comparison of Graph Cuts with Belief Propagation for Stereo, using Identical MRF Parameters
 Comparison of Graph Cuts with Belief Propagation for Stereo, using Identical MRF Parameters Marshall F. Tappen William T. Freeman Computer Science and Artificial Intelligence Laboratory Massachusetts Institute
Comparison of Graph Cuts with Belief Propagation for Stereo, using Identical MRF Parameters Marshall F. Tappen William T. Freeman Computer Science and Artificial Intelligence Laboratory Massachusetts Institute
Regularization and Markov Random Fields (MRF) CS 664 Spring 2008
 CS 664 Spring 2008") Regularization and Markov Random Fields (MRF) CS 664 Spring 2008 Regularization in Low Level Vision Low level vision problems concerned with estimating some quantity at each pixel Visual motion (u(x,y),v(x,y))
Regularization and Markov Random Fields (MRF) CS 664 Spring 2008 Regularization in Low Level Vision Low level vision problems concerned with estimating some quantity at each pixel Visual motion (u(x,y),v(x,y))
MULTI-REGION SEGMENTATION
 MULTI-REGION SEGMENTATION USING GRAPH-CUTS Johannes Ulén Abstract This project deals with multi-region segmenation using graph-cuts and is mainly based on a paper by Delong and Boykov [1]. The difference
MULTI-REGION SEGMENTATION USING GRAPH-CUTS Johannes Ulén Abstract This project deals with multi-region segmenation using graph-cuts and is mainly based on a paper by Delong and Boykov [1]. The difference
Ninio, J. and Stevens, K. A. (2000) Variations on the Hermann grid: an extinction illusion. Perception, 29,
 Variations on the Hermann grid: an extinction illusion. Perception, 29,") Ninio, J. and Stevens, K. A. (2000) Variations on the Hermann grid: an extinction illusion. Perception, 29, 1209-1217. CS 4495 Computer Vision A. Bobick Sparse to Dense Correspodence Building Rome in
Ninio, J. and Stevens, K. A. (2000) Variations on the Hermann grid: an extinction illusion. Perception, 29, 1209-1217. CS 4495 Computer Vision A. Bobick Sparse to Dense Correspodence Building Rome in
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 19: Optical flow http://en.wikipedia.org/wiki/barberpole_illusion Readings Szeliski, Chapter 8.4-8.5 Announcements Project 2b due Tuesday, Nov 2 Please sign
CS6670: Computer Vision Noah Snavely Lecture 19: Optical flow http://en.wikipedia.org/wiki/barberpole_illusion Readings Szeliski, Chapter 8.4-8.5 Announcements Project 2b due Tuesday, Nov 2 Please sign
Graph Cuts vs. Level Sets. part I Basics of Graph Cuts
 ECCV 2006 tutorial on Graph Cuts vs. Level Sets part I Basics of Graph Cuts Yuri Boykov University of Western Ontario Daniel Cremers University of Bonn Vladimir Kolmogorov University College London Graph
ECCV 2006 tutorial on Graph Cuts vs. Level Sets part I Basics of Graph Cuts Yuri Boykov University of Western Ontario Daniel Cremers University of Bonn Vladimir Kolmogorov University College London Graph
Stereo II CSE 576. Ali Farhadi. Several slides from Larry Zitnick and Steve Seitz
 Stereo II CSE 576 Ali Farhadi Several slides from Larry Zitnick and Steve Seitz Camera parameters A camera is described by several parameters Translation T of the optical center from the origin of world
Stereo II CSE 576 Ali Farhadi Several slides from Larry Zitnick and Steve Seitz Camera parameters A camera is described by several parameters Translation T of the optical center from the origin of world
A Novel Image Classification Model Based on Contourlet Transform and Dynamic Fuzzy Graph Cuts
 Appl. Math. Inf. Sci. 6 No. 1S pp. 93S-97S (2012) Applied Mathematics & Information Sciences An International Journal @ 2012 NSP Natural Sciences Publishing Cor. A Novel Image Classification Model Based
Appl. Math. Inf. Sci. 6 No. 1S pp. 93S-97S (2012) Applied Mathematics & Information Sciences An International Journal @ 2012 NSP Natural Sciences Publishing Cor. A Novel Image Classification Model Based
Chaplin, Modern Times, 1936
 Chaplin, Modern Times, 1936 [A Bucket of Water and a Glass Matte: Special Effects in Modern Times; bonus feature on The Criterion Collection set] Multi-view geometry problems Structure: Given projections
Chaplin, Modern Times, 1936 [A Bucket of Water and a Glass Matte: Special Effects in Modern Times; bonus feature on The Criterion Collection set] Multi-view geometry problems Structure: Given projections
Final project bits and pieces
 Final project bits and pieces The project is expected to take four weeks of time for up to four people. At 12 hours per week per person that comes out to: ~192 hours of work for a four person team. Capstone:
Final project bits and pieces The project is expected to take four weeks of time for up to four people. At 12 hours per week per person that comes out to: ~192 hours of work for a four person team. Capstone:
Markov/Conditional Random Fields, Graph Cut, and applications in Computer Vision
 Markov/Conditional Random Fields, Graph Cut, and applications in Computer Vision Fuxin Li Slides and materials from Le Song, Tucker Hermans, Pawan Kumar, Carsten Rother, Peter Orchard, and others Recap:
Markov/Conditional Random Fields, Graph Cut, and applications in Computer Vision Fuxin Li Slides and materials from Le Song, Tucker Hermans, Pawan Kumar, Carsten Rother, Peter Orchard, and others Recap:
Combinatorial optimization and its applications in image Processing. Filip Malmberg
 Combinatorial optimization and its applications in image Processing Filip Malmberg Part 1: Optimization in image processing Optimization in image processing Many image processing problems can be formulated
Combinatorial optimization and its applications in image Processing Filip Malmberg Part 1: Optimization in image processing Optimization in image processing Many image processing problems can be formulated
Public Library, Stereoscopic Looking Room, Chicago, by Phillips, 1923
 Public Library, Stereoscopic Looking Room, Chicago, by Phillips, 1923 Teesta suspension bridge-darjeeling, India Mark Twain at Pool Table", no date, UCR Museum of Photography Woman getting eye exam during
Public Library, Stereoscopic Looking Room, Chicago, by Phillips, 1923 Teesta suspension bridge-darjeeling, India Mark Twain at Pool Table", no date, UCR Museum of Photography Woman getting eye exam during
Maximum flows and minimal cuts. Filip Malmberg
 Maximum flows and minimal cuts Filip Malmberg MSF cuts I A Minimum Spanning Forest with respect to a set of seed-points divides a graph into a number of connected components. Thus, it defines a cut on
Maximum flows and minimal cuts Filip Malmberg MSF cuts I A Minimum Spanning Forest with respect to a set of seed-points divides a graph into a number of connected components. Thus, it defines a cut on
Introduction à la vision artificielle X
 Introduction à la vision artificielle X Jean Ponce Email: ponce@di.ens.fr Web: http://www.di.ens.fr/~ponce Planches après les cours sur : http://www.di.ens.fr/~ponce/introvis/lect10.pptx http://www.di.ens.fr/~ponce/introvis/lect10.pdf
Introduction à la vision artificielle X Jean Ponce Email: ponce@di.ens.fr Web: http://www.di.ens.fr/~ponce Planches après les cours sur : http://www.di.ens.fr/~ponce/introvis/lect10.pptx http://www.di.ens.fr/~ponce/introvis/lect10.pdf
Markov Networks in Computer Vision
 Markov Networks in Computer Vision Sargur Srihari srihari@cedar.buffalo.edu 1 Markov Networks for Computer Vision Some applications: 1. Image segmentation 2. Removal of blur/noise 3. Stereo reconstruction
Markov Networks in Computer Vision Sargur Srihari srihari@cedar.buffalo.edu 1 Markov Networks for Computer Vision Some applications: 1. Image segmentation 2. Removal of blur/noise 3. Stereo reconstruction
Markov Networks in Computer Vision. Sargur Srihari
 Markov Networks in Computer Vision Sargur srihari@cedar.buffalo.edu 1 Markov Networks for Computer Vision Important application area for MNs 1. Image segmentation 2. Removal of blur/noise 3. Stereo reconstruction
Markov Networks in Computer Vision Sargur srihari@cedar.buffalo.edu 1 Markov Networks for Computer Vision Important application area for MNs 1. Image segmentation 2. Removal of blur/noise 3. Stereo reconstruction
Data Term. Michael Bleyer LVA Stereo Vision
 Data Term Michael Bleyer LVA Stereo Vision What happened last time? We have looked at our energy function: E ( D) = m( p, dp) + p I < p, q > N s( p, q) We have learned about an optimization algorithm that
Data Term Michael Bleyer LVA Stereo Vision What happened last time? We have looked at our energy function: E ( D) = m( p, dp) + p I < p, q > N s( p, q) We have learned about an optimization algorithm that
Dr. Ulas Bagci
 CAP- Computer Vision Lecture - Image Segmenta;on as an Op;miza;on Problem Dr. Ulas Bagci bagci@ucf.edu Reminders Oct Guest Lecture: SVM by Dr. Gong Oct 8 Guest Lecture: Camera Models by Dr. Shah PA# October
CAP- Computer Vision Lecture - Image Segmenta;on as an Op;miza;on Problem Dr. Ulas Bagci bagci@ucf.edu Reminders Oct Guest Lecture: SVM by Dr. Gong Oct 8 Guest Lecture: Camera Models by Dr. Shah PA# October
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
Mathematics in Image Processing
 Mathematics in Image Processing Michal Šorel Department of Image Processing Institute of Information Theory and Automation (ÚTIA) Academy of Sciences of the Czech Republic http://zoi.utia.cas.cz/ Mathematics
Mathematics in Image Processing Michal Šorel Department of Image Processing Institute of Information Theory and Automation (ÚTIA) Academy of Sciences of the Czech Republic http://zoi.utia.cas.cz/ Mathematics
Graph Cuts. Srikumar Ramalingam School of Computing University of Utah
 Graph Cuts Srikumar Ramalingam School o Computing University o Utah Outline Introduction Pseudo-Boolean Functions Submodularity Max-low / Min-cut Algorithm Alpha-Expansion Segmentation Problem [Boykov
Graph Cuts Srikumar Ramalingam School o Computing University o Utah Outline Introduction Pseudo-Boolean Functions Submodularity Max-low / Min-cut Algorithm Alpha-Expansion Segmentation Problem [Boykov
3D photography. Digital Visual Effects, Spring 2007 Yung-Yu Chuang 2007/5/15
 3D photography Digital Visual Effects, Spring 2007 Yung-Yu Chuang 2007/5/15 with slides by Szymon Rusinkiewicz, Richard Szeliski, Steve Seitz and Brian Curless Announcements Project #3 is due on 5/20.
3D photography Digital Visual Effects, Spring 2007 Yung-Yu Chuang 2007/5/15 with slides by Szymon Rusinkiewicz, Richard Szeliski, Steve Seitz and Brian Curless Announcements Project #3 is due on 5/20.
COMP 558 lecture 22 Dec. 1, 2010
 Binocular correspondence problem Last class we discussed how to remap the pixels of two images so that corresponding points are in the same row. This is done by computing the fundamental matrix, defining
Binocular correspondence problem Last class we discussed how to remap the pixels of two images so that corresponding points are in the same row. This is done by computing the fundamental matrix, defining
Supplementary Material: Adaptive and Move Making Auxiliary Cuts for Binary Pairwise Energies
 Supplementary Material: Adaptive and Move Making Auxiliary Cuts for Binary Pairwise Energies Lena Gorelick Yuri Boykov Olga Veksler Computer Science Department University of Western Ontario Abstract Below
Supplementary Material: Adaptive and Move Making Auxiliary Cuts for Binary Pairwise Energies Lena Gorelick Yuri Boykov Olga Veksler Computer Science Department University of Western Ontario Abstract Below
MEDICAL IMAGE COMPUTING (CAP 5937) LECTURE 10: Medical Image Segmentation as an Energy Minimization Problem
 LECTURE 10: Medical Image Segmentation as an Energy Minimization Problem") SPRING 06 MEDICAL IMAGE COMPUTING (CAP 97) LECTURE 0: Medical Image Segmentation as an Energy Minimization Problem Dr. Ulas Bagci HEC, Center for Research in Computer Vision (CRCV), University of Central
SPRING 06 MEDICAL IMAGE COMPUTING (CAP 97) LECTURE 0: Medical Image Segmentation as an Energy Minimization Problem Dr. Ulas Bagci HEC, Center for Research in Computer Vision (CRCV), University of Central
CS 5540 Spring 2013 Assignment 3, v1.0 Due: Apr. 24th 11:59PM
 1 Introduction In this programming project, we are going to do a simple image segmentation task. Given a grayscale image with a bright object against a dark background and we are going to do a binary decision
1 Introduction In this programming project, we are going to do a simple image segmentation task. Given a grayscale image with a bright object against a dark background and we are going to do a binary decision
Stereo Matching.
 Stereo Matching Stereo Vision [1] Reduction of Searching by Epipolar Constraint [1] Photometric Constraint [1] Same world point has same intensity in both images. True for Lambertian surfaces A Lambertian
Stereo Matching Stereo Vision [1] Reduction of Searching by Epipolar Constraint [1] Photometric Constraint [1] Same world point has same intensity in both images. True for Lambertian surfaces A Lambertian
Evaluation of Different Methods for Using Colour Information in Global Stereo Matching Approaches
 Evaluation of Different Methods for Using Colour Information in Global Stereo Matching Approaches Michael Bleyer 1, Sylvie Chambon 2, Uta Poppe 1 and Margrit Gelautz 1 1 Vienna University of Technology,
Evaluation of Different Methods for Using Colour Information in Global Stereo Matching Approaches Michael Bleyer 1, Sylvie Chambon 2, Uta Poppe 1 and Margrit Gelautz 1 1 Vienna University of Technology,
CS664 Lecture #21: SIFT, object recognition, dynamic programming
 CS664 Lecture #21: SIFT, object recognition, dynamic programming Some material taken from: Sebastian Thrun, Stanford http://cs223b.stanford.edu/ Yuri Boykov, Western Ontario David Lowe, UBC http://www.cs.ubc.ca/~lowe/keypoints/
CS664 Lecture #21: SIFT, object recognition, dynamic programming Some material taken from: Sebastian Thrun, Stanford http://cs223b.stanford.edu/ Yuri Boykov, Western Ontario David Lowe, UBC http://www.cs.ubc.ca/~lowe/keypoints/
Targil 10 : Why Mosaic? Why is this a challenge? Exposure differences Scene illumination Miss-registration Moving objects
 Why Mosaic? Are you getting the whole picture? Compact Camera FOV = 5 x 35 Targil : Panoramas - Stitching and Blending Some slides from Alexei Efros 2 Slide from Brown & Lowe Why Mosaic? Are you getting
Why Mosaic? Are you getting the whole picture? Compact Camera FOV = 5 x 35 Targil : Panoramas - Stitching and Blending Some slides from Alexei Efros 2 Slide from Brown & Lowe Why Mosaic? Are you getting
Image Based Reconstruction II
 Image Based Reconstruction II Qixing Huang Feb. 2 th 2017 Slide Credit: Yasutaka Furukawa Image-Based Geometry Reconstruction Pipeline Last Lecture: Multi-View SFM Multi-View SFM This Lecture: Multi-View
Image Based Reconstruction II Qixing Huang Feb. 2 th 2017 Slide Credit: Yasutaka Furukawa Image-Based Geometry Reconstruction Pipeline Last Lecture: Multi-View SFM Multi-View SFM This Lecture: Multi-View
CS4670: Computer Vision Noah Snavely
 CS4670: Computer Vision Noah Snavely Lecture 2: Edge detection From Sandlot Science Announcements Project 1 released, due Friday, September 7 1 Edge detection Convert a 2D image into a set of curves Extracts
CS4670: Computer Vision Noah Snavely Lecture 2: Edge detection From Sandlot Science Announcements Project 1 released, due Friday, September 7 1 Edge detection Convert a 2D image into a set of curves Extracts
Stereo. 11/02/2012 CS129, Brown James Hays. Slides by Kristen Grauman
 Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
Segmentation Based Stereo. Michael Bleyer LVA Stereo Vision
 Segmentation Based Stereo Michael Bleyer LVA Stereo Vision What happened last time? Once again, we have looked at our energy function: E ( D) = m( p, dp) + p I < p, q > We have investigated the matching
Segmentation Based Stereo Michael Bleyer LVA Stereo Vision What happened last time? Once again, we have looked at our energy function: E ( D) = m( p, dp) + p I < p, q > We have investigated the matching
Stereo: Disparity and Matching
 CS 4495 Computer Vision Aaron Bobick School of Interactive Computing Administrivia PS2 is out. But I was late. So we pushed the due date to Wed Sept 24 th, 11:55pm. There is still *no* grace period. To
CS 4495 Computer Vision Aaron Bobick School of Interactive Computing Administrivia PS2 is out. But I was late. So we pushed the due date to Wed Sept 24 th, 11:55pm. There is still *no* grace period. To
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely Lecture 4: Harris corner detection Szeliski: 4.1 Reading Announcements Project 1 (Hybrid Images) code due next Wednesday, Feb 14, by 11:59pm Artifacts due Friday, Feb
CS5670: Computer Vision Noah Snavely Lecture 4: Harris corner detection Szeliski: 4.1 Reading Announcements Project 1 (Hybrid Images) code due next Wednesday, Feb 14, by 11:59pm Artifacts due Friday, Feb
Stereo. Outline. Multiple views 3/29/2017. Thurs Mar 30 Kristen Grauman UT Austin. Multi-view geometry, matching, invariant features, stereo vision
 Stereo Thurs Mar 30 Kristen Grauman UT Austin Outline Last time: Human stereopsis Epipolar geometry and the epipolar constraint Case example with parallel optical axes General case with calibrated cameras
Stereo Thurs Mar 30 Kristen Grauman UT Austin Outline Last time: Human stereopsis Epipolar geometry and the epipolar constraint Case example with parallel optical axes General case with calibrated cameras
Segmentation with non-linear constraints on appearance, complexity, and geometry
 IPAM February 2013 Western Univesity Segmentation with non-linear constraints on appearance, complexity, and geometry Yuri Boykov Andrew Delong Lena Gorelick Hossam Isack Anton Osokin Frank Schmidt Olga
IPAM February 2013 Western Univesity Segmentation with non-linear constraints on appearance, complexity, and geometry Yuri Boykov Andrew Delong Lena Gorelick Hossam Isack Anton Osokin Frank Schmidt Olga
BIL Computer Vision Apr 16, 2014
 BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
Image Segmentation continued Graph Based Methods. Some slides: courtesy of O. Capms, Penn State, J.Ponce and D. Fortsyth, Computer Vision Book
 Image Segmentation continued Graph Based Methods Some slides: courtesy of O. Capms, Penn State, J.Ponce and D. Fortsyth, Computer Vision Book Previously Binary segmentation Segmentation by thresholding
Image Segmentation continued Graph Based Methods Some slides: courtesy of O. Capms, Penn State, J.Ponce and D. Fortsyth, Computer Vision Book Previously Binary segmentation Segmentation by thresholding
Topics to be Covered in the Rest of the Semester. CSci 4968 and 6270 Computational Vision Lecture 15 Overview of Remainder of the Semester
 Topics to be Covered in the Rest of the Semester CSci 4968 and 6270 Computational Vision Lecture 15 Overview of Remainder of the Semester Charles Stewart Department of Computer Science Rensselaer Polytechnic
Topics to be Covered in the Rest of the Semester CSci 4968 and 6270 Computational Vision Lecture 15 Overview of Remainder of the Semester Charles Stewart Department of Computer Science Rensselaer Polytechnic
Graphs, graph algorithms (for image segmentation),... in progress
,... in progress") Graphs, graph algorithms (for image segmentation),... in progress Václav Hlaváč Czech Technical University in Prague Czech Institute of Informatics, Robotics and Cybernetics 66 36 Prague 6, Jugoslávských
Graphs, graph algorithms (for image segmentation),... in progress Václav Hlaváč Czech Technical University in Prague Czech Institute of Informatics, Robotics and Cybernetics 66 36 Prague 6, Jugoslávských
MEDICAL IMAGE COMPUTING (CAP 5937) LECTURE 10: Medical Image Segmentation as an Energy Minimization Problem
 LECTURE 10: Medical Image Segmentation as an Energy Minimization Problem") SPRING 07 MEDICAL IMAGE COMPUTING (CAP 97) LECTURE 0: Medical Image Segmentation as an Energy Minimization Problem Dr. Ulas Bagci HEC, Center for Research in Computer Vision (CRCV), University of Central
SPRING 07 MEDICAL IMAGE COMPUTING (CAP 97) LECTURE 0: Medical Image Segmentation as an Energy Minimization Problem Dr. Ulas Bagci HEC, Center for Research in Computer Vision (CRCV), University of Central
Approximate decoding: ICM, block methods, alpha-beta swap & alpha-expansion
 Approximate decoding: ICM, block methods, alpha-beta swap & alpha-expansion Julieta Martinez University of British Columbia August 25, 2015 https://www.youtube.com/watch?v=kp3ik5f3-2c&t=18m36s Outline
Approximate decoding: ICM, block methods, alpha-beta swap & alpha-expansion Julieta Martinez University of British Columbia August 25, 2015 https://www.youtube.com/watch?v=kp3ik5f3-2c&t=18m36s Outline
Markov Random Fields and Segmentation with Graph Cuts
 Markov Random Fields and Segmentation with Graph Cuts Computer Vision Jia-Bin Huang, Virginia Tech Many slides from D. Hoiem Administrative stuffs Final project Proposal due Oct 27 (Thursday) HW 4 is out
Markov Random Fields and Segmentation with Graph Cuts Computer Vision Jia-Bin Huang, Virginia Tech Many slides from D. Hoiem Administrative stuffs Final project Proposal due Oct 27 (Thursday) HW 4 is out
CSE 417 Network Flows (pt 3) Modeling with Min Cuts
 Modeling with Min Cuts") CSE 417 Network Flows (pt 3) Modeling with Min Cuts Reminders > HW6 is due on Friday start early bug fixed on line 33 of OptimalLineup.java: > change true to false Review of last two lectures > Defined
CSE 417 Network Flows (pt 3) Modeling with Min Cuts Reminders > HW6 is due on Friday start early bug fixed on line 33 of OptimalLineup.java: > change true to false Review of last two lectures > Defined
Vision is inferential. (
 Announcements Final: Thursday, December 15, 8am, here. Review Session, Wednesday, Dec 14, 1pm, AV Williams 4424. Review sheet with practice problems on-line. Hints for Final Focus on core techniques/ideas:
Announcements Final: Thursday, December 15, 8am, here. Review Session, Wednesday, Dec 14, 1pm, AV Williams 4424. Review sheet with practice problems on-line. Hints for Final Focus on core techniques/ideas:
Markov Random Fields with Efficient Approximations
 Markov Random Fields with Efficient Approximations Yuri Boykov Olga Veksler Ramin Zabih Computer Science Department Cornell University Ithaca, NY 14853 Abstract Markov Random Fields (MRF s) can be used
Markov Random Fields with Efficient Approximations Yuri Boykov Olga Veksler Ramin Zabih Computer Science Department Cornell University Ithaca, NY 14853 Abstract Markov Random Fields (MRF s) can be used
CS4670: Computer Vision
 CS4670: Computer Vision Noah Snavely Lecture 6: Feature matching and alignment Szeliski: Chapter 6.1 Reading Last time: Corners and blobs Scale-space blob detector: Example Feature descriptors We know
CS4670: Computer Vision Noah Snavely Lecture 6: Feature matching and alignment Szeliski: Chapter 6.1 Reading Last time: Corners and blobs Scale-space blob detector: Example Feature descriptors We know
Computer Vision I - Filtering and Feature detection
 Computer Vision I - Filtering and Feature detection Carsten Rother 30/10/2015 Computer Vision I: Basics of Image Processing Roadmap: Basics of Digital Image Processing Computer Vision I: Basics of Image
Computer Vision I - Filtering and Feature detection Carsten Rother 30/10/2015 Computer Vision I: Basics of Image Processing Roadmap: Basics of Digital Image Processing Computer Vision I: Basics of Image
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 11 140311 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Motion Analysis Motivation Differential Motion Optical
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 11 140311 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Motion Analysis Motivation Differential Motion Optical
Computing Visual Correspondence with Occlusions via Graph Cuts
 Computing Visual Correspondence with Occlusions via Graph Cuts Vladimir Kolmogorov vnk@cs.cornell.edu Ramin Zabih rdz@cs.cornell.edu Computer Science Department Cornell University Ithaca, NY 14853 Abstract
Computing Visual Correspondence with Occlusions via Graph Cuts Vladimir Kolmogorov vnk@cs.cornell.edu Ramin Zabih rdz@cs.cornell.edu Computer Science Department Cornell University Ithaca, NY 14853 Abstract
Combining Top-down and Bottom-up Segmentation
 Combining Top-down and Bottom-up Segmentation Authors: Eran Borenstein, Eitan Sharon, Shimon Ullman Presenter: Collin McCarthy Introduction Goal Separate object from background Problems Inaccuracies Top-down
Combining Top-down and Bottom-up Segmentation Authors: Eran Borenstein, Eitan Sharon, Shimon Ullman Presenter: Collin McCarthy Introduction Goal Separate object from background Problems Inaccuracies Top-down
CS 664 Segmentation. Daniel Huttenlocher
 CS 664 Segmentation Daniel Huttenlocher Grouping Perceptual Organization Structural relationships between tokens Parallelism, symmetry, alignment Similarity of token properties Often strong psychophysical
CS 664 Segmentation Daniel Huttenlocher Grouping Perceptual Organization Structural relationships between tokens Parallelism, symmetry, alignment Similarity of token properties Often strong psychophysical
Lecture 14: Computer Vision
 CS/b: Artificial Intelligence II Prof. Olga Veksler Lecture : Computer Vision D shape from Images Stereo Reconstruction Many Slides are from Steve Seitz (UW), S. Narasimhan Outline Cues for D shape perception
CS/b: Artificial Intelligence II Prof. Olga Veksler Lecture : Computer Vision D shape from Images Stereo Reconstruction Many Slides are from Steve Seitz (UW), S. Narasimhan Outline Cues for D shape perception
Stereo Correspondence with Occlusions using Graph Cuts
 Stereo Correspondence with Occlusions using Graph Cuts EE368 Final Project Matt Stevens mslf@stanford.edu Zuozhen Liu zliu2@stanford.edu I. INTRODUCTION AND MOTIVATION Given two stereo images of a scene,
Stereo Correspondence with Occlusions using Graph Cuts EE368 Final Project Matt Stevens mslf@stanford.edu Zuozhen Liu zliu2@stanford.edu I. INTRODUCTION AND MOTIVATION Given two stereo images of a scene,
Announcements. Image Segmentation. From images to objects. Extracting objects. Status reports next Thursday ~5min presentations in class
 Image Segmentation Announcements Status reports next Thursday ~5min presentations in class Project voting From Sandlot Science Today s Readings Forsyth & Ponce, Chapter 1 (plus lots of optional references
Image Segmentation Announcements Status reports next Thursday ~5min presentations in class Project voting From Sandlot Science Today s Readings Forsyth & Ponce, Chapter 1 (plus lots of optional references
Image Segmentation. Lecture14: Image Segmentation. Sample Segmentation Results. Use of Image Segmentation
 Image Segmentation CSED441:Introduction to Computer Vision (2015S) Lecture14: Image Segmentation What is image segmentation? Process of partitioning an image into multiple homogeneous segments Process
Image Segmentation CSED441:Introduction to Computer Vision (2015S) Lecture14: Image Segmentation What is image segmentation? Process of partitioning an image into multiple homogeneous segments Process
Geometric Reconstruction Dense reconstruction of scene geometry
 Lecture 5. Dense Reconstruction and Tracking with Real-Time Applications Part 2: Geometric Reconstruction Dr Richard Newcombe and Dr Steven Lovegrove Slide content developed from: [Newcombe, Dense Visual
Lecture 5. Dense Reconstruction and Tracking with Real-Time Applications Part 2: Geometric Reconstruction Dr Richard Newcombe and Dr Steven Lovegrove Slide content developed from: [Newcombe, Dense Visual
Epipolar Geometry and Stereo Vision
 CS 1674: Intro to Computer Vision Epipolar Geometry and Stereo Vision Prof. Adriana Kovashka University of Pittsburgh October 5, 2016 Announcement Please send me three topics you want me to review next
CS 1674: Intro to Computer Vision Epipolar Geometry and Stereo Vision Prof. Adriana Kovashka University of Pittsburgh October 5, 2016 Announcement Please send me three topics you want me to review next
Robotics Programming Laboratory
 Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Introduction to Graph Theory
 Introduction to Graph Theory Tandy Warnow January 20, 2017 Graphs Tandy Warnow Graphs A graph G = (V, E) is an object that contains a vertex set V and an edge set E. We also write V (G) to denote the vertex
Introduction to Graph Theory Tandy Warnow January 20, 2017 Graphs Tandy Warnow Graphs A graph G = (V, E) is an object that contains a vertex set V and an edge set E. We also write V (G) to denote the vertex
Stereo Vision II: Dense Stereo Matching
 Stereo Vision II: Dense Stereo Matching Nassir Navab Slides prepared by Christian Unger Outline. Hardware. Challenges. Taxonomy of Stereo Matching. Analysis of Different Problems. Practical Considerations.
Stereo Vision II: Dense Stereo Matching Nassir Navab Slides prepared by Christian Unger Outline. Hardware. Challenges. Taxonomy of Stereo Matching. Analysis of Different Problems. Practical Considerations.
Final Review CMSC 733 Fall 2014
 Final Review CMSC 733 Fall 2014 We have covered a lot of material in this course. One way to organize this material is around a set of key equations and algorithms. You should be familiar with all of these,
Final Review CMSC 733 Fall 2014 We have covered a lot of material in this course. One way to organize this material is around a set of key equations and algorithms. You should be familiar with all of these,
Stereo. Many slides adapted from Steve Seitz
 Stereo Many slides adapted from Steve Seitz Binocular stereo Given a calibrated binocular stereo pair, fuse it to produce a depth image image 1 image 2 Dense depth map Binocular stereo Given a calibrated
Stereo Many slides adapted from Steve Seitz Binocular stereo Given a calibrated binocular stereo pair, fuse it to produce a depth image image 1 image 2 Dense depth map Binocular stereo Given a calibrated
Algorithms for Markov Random Fields in Computer Vision
 Algorithms for Markov Random Fields in Computer Vision Dan Huttenlocher November, 2003 (Joint work with Pedro Felzenszwalb) Random Field Broadly applicable stochastic model Collection of n sites S Hidden
Algorithms for Markov Random Fields in Computer Vision Dan Huttenlocher November, 2003 (Joint work with Pedro Felzenszwalb) Random Field Broadly applicable stochastic model Collection of n sites S Hidden
CS 1674: Intro to Computer Vision. Midterm Review. Prof. Adriana Kovashka University of Pittsburgh October 10, 2016
 CS 1674: Intro to Computer Vision Midterm Review Prof. Adriana Kovashka University of Pittsburgh October 10, 2016 Reminders The midterm exam is in class on this coming Wednesday There will be no make-up
CS 1674: Intro to Computer Vision Midterm Review Prof. Adriana Kovashka University of Pittsburgh October 10, 2016 Reminders The midterm exam is in class on this coming Wednesday There will be no make-up
Lecture 10: Multi view geometry
 Lecture 10: Multi view geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Lecture 10: Multi view geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Graph Cuts in Vision and Graphics: Theories and Applications
 In Handbook of Mathematical Models in Computer Vision, Springer, 2006 p.1 Graph Cuts in Vision and Graphics: Theories and Applications Yuri Boykov and Olga Veksler Computer Science, The University of Western
In Handbook of Mathematical Models in Computer Vision, Springer, 2006 p.1 Graph Cuts in Vision and Graphics: Theories and Applications Yuri Boykov and Olga Veksler Computer Science, The University of Western
Input. Output. Problem Definition. Rectified stereo image pair All correspondences lie in same scan lines
 Problem Definition 3 Input Rectified stereo image pair All correspondences lie in same scan lines Output Disparity map of the reference view Foreground: large disparity Background: small disparity Matching
Problem Definition 3 Input Rectified stereo image pair All correspondences lie in same scan lines Output Disparity map of the reference view Foreground: large disparity Background: small disparity Matching
Stereo vision. Many slides adapted from Steve Seitz
 Stereo vision Many slides adapted from Steve Seitz What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape What is
Stereo vision Many slides adapted from Steve Seitz What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape What is
Image Restoration using Markov Random Fields
 Image Restoration using Markov Random Fields Based on the paper Stochastic Relaxation, Gibbs Distributions and Bayesian Restoration of Images, PAMI, 1984, Geman and Geman. and the book Markov Random Field
Image Restoration using Markov Random Fields Based on the paper Stochastic Relaxation, Gibbs Distributions and Bayesian Restoration of Images, PAMI, 1984, Geman and Geman. and the book Markov Random Field
Introduction to Computer Vision. Week 10, Winter 2010 Instructor: Prof. Ko Nishino
 Introduction to Computer Vision Week 10, Winter 2010 Instructor: Prof. Ko Nishino Today How do we recover geometry from 2 views? Stereo Can we recover geometry from a sequence of images Structure-from-Motion
Introduction to Computer Vision Week 10, Winter 2010 Instructor: Prof. Ko Nishino Today How do we recover geometry from 2 views? Stereo Can we recover geometry from a sequence of images Structure-from-Motion
Efficient Belief Propagation for Early Vision
 Efficient Belief Propagation for Early Vision Pedro F. Felzenszwalb and Daniel P. Huttenlocher Department of Computer Science Cornell University {pff,dph}@cs.cornell.edu Abstract Markov random field models
Efficient Belief Propagation for Early Vision Pedro F. Felzenszwalb and Daniel P. Huttenlocher Department of Computer Science Cornell University {pff,dph}@cs.cornell.edu Abstract Markov random field models
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely Lecture 2: Edge detection From Sandlot Science Announcements Project 1 (Hybrid Images) is now on the course webpage (see Projects link) Due Wednesday, Feb 15, by 11:59pm
CS5670: Computer Vision Noah Snavely Lecture 2: Edge detection From Sandlot Science Announcements Project 1 (Hybrid Images) is now on the course webpage (see Projects link) Due Wednesday, Feb 15, by 11:59pm
CSE 417 Network Flows (pt 4) Min Cost Flows
 Min Cost Flows") CSE 417 Network Flows (pt 4) Min Cost Flows Reminders > HW6 is due Monday Review of last three lectures > Defined the maximum flow problem find the feasible flow of maximum value flow is feasible if it
CSE 417 Network Flows (pt 4) Min Cost Flows Reminders > HW6 is due Monday Review of last three lectures > Defined the maximum flow problem find the feasible flow of maximum value flow is feasible if it
Applications. Foreground / background segmentation Finding skin-colored regions. Finding the moving objects. Intelligent scissors
 Segmentation I Goal Separate image into coherent regions Berkeley segmentation database: http://www.eecs.berkeley.edu/research/projects/cs/vision/grouping/segbench/ Slide by L. Lazebnik Applications Intelligent
Segmentation I Goal Separate image into coherent regions Berkeley segmentation database: http://www.eecs.berkeley.edu/research/projects/cs/vision/grouping/segbench/ Slide by L. Lazebnik Applications Intelligent
Filtering and Enhancing Images
 KECE471 Computer Vision Filtering and Enhancing Images Chang-Su Kim Chapter 5, Computer Vision by Shapiro and Stockman Note: Some figures and contents in the lecture notes of Dr. Stockman are used partly.
KECE471 Computer Vision Filtering and Enhancing Images Chang-Su Kim Chapter 5, Computer Vision by Shapiro and Stockman Note: Some figures and contents in the lecture notes of Dr. Stockman are used partly.
Robert Collins CSE486, Penn State. Lecture 09: Stereo Algorithms
 Lecture 09: Stereo Algorithms left camera located at (0,0,0) Recall: Simple Stereo System Y y Image coords of point (X,Y,Z) Left Camera: x T x z (, ) y Z (, ) x (X,Y,Z) z X right camera located at (T x,0,0)
Lecture 09: Stereo Algorithms left camera located at (0,0,0) Recall: Simple Stereo System Y y Image coords of point (X,Y,Z) Left Camera: x T x z (, ) y Z (, ) x (X,Y,Z) z X right camera located at (T x,0,0)