CS 1674: Intro to Computer Vision. Midterm Review. Prof. Adriana Kovashka University of Pittsburgh October 10, 2016
|
|
|
- Marcus Copeland
- 5 years ago
- Views:
Transcription
1 CS 1674: Intro to Computer Vision Midterm Review Prof. Adriana Kovashka University of Pittsburgh October 10, 2016
2 Reminders The midterm exam is in class on this coming Wednesday There will be no make-up exams unless you or a close relative is seriously ill!
3 Review requests I received Textures and texture representations, image responses to size and orientation of Gaussian filter banks, comparisons 4 Corner detection alg, Harris 4 Invariance vs covariance, affine intensity change, and applications to know 3 Scale-invariant detection, blob detection, Harris automatic scale selection 3 Sift and feature description 3 Keypoint matching alg, feature matching 2 Examples of how to compute and apply homography, epipolar geometry 2 Why it makes sense to use the ratio: distance to best match / distance to second best match when matching features across images Summary of equations students need to know Pyramids Convolution practical use Filters for transforming the image
4 Transformations, Homographies, Epipolar Geometry
5 2D Linear Transformations x' y' a c bx d y Only linear 2D transformations can be represented with a 2x2 matrix. Linear transformations are combinations of Scale, Rotation, Shear, and Mirror Alyosha Efros
6 2D Affine Transformations Affine transformations are combinations of Linear transformations, and Translations Maps lines to lines, parallel lines remain parallel w y x f e d c b a w y x ' ' ' Adapted from Alyosha Efros
7 Projective Transformations Projective transformations: Affine transformations, and Projective warps Parallel lines do not necessarily remain parallel w y x i h g f e d c b a w y x ' ' ' Kristen Grauman
8 How to stitch together a panorama (a.k.a. Basic Procedure mosaic)? Take a sequence of images from the same position Rotate the camera about its optical center Compute the homography (transformation) between second image and first Transform the second image to overlap with the first Blend the two together to create a mosaic (If there are more images, repeat) Modified from Steve Seitz
9 Computing the homography x x, y 1 1 1, y 1 x 2, y 2 x, y 2 2 x, x, n y n n y n To compute the homography given pairs of corresponding points in the images, we need to set up an equation where the parameters of H are the unknowns Kristen Grauman
10 Computing the homography p = Hp wx' a b c x wy' d e f y w g h i 1 Can set scale factor i=1. So, there are 8 unknowns. Set up a system of linear equations: Ah = b where vector of unknowns h = [a,b,c,d,e,f,g,h] T Need at least 8 eqs, but the more the better Solve for h. If overconstrained, solve using least-squares: min Ah b 2 Kristen Grauman
11 Computing the homography Assume we have four matched points: How do we compute homography H? h 0 ' ' ' ' ' ' y yy xy y x x yx xx y x ' ' ' ' ' p' w y w w x h h h h h h h h h H h h h h h h h h h h Derek Hoiem p =Hp Apply SVD: UDV T = A [U, S, V] = svd(a); h = V smallest (column of V corr. to smallest singular value) A


12 Transforming the second image Test point: Image 2 Image 1 canvas x, y wx wy w, w x, y To apply a given homography H Compute p = Hp (regular matrix multiply) Convert p from homogeneous to image coordinates Modified from Kristen Grauman wx' wy' w p * * * * * * H * * * x y 1 p
 y y x x")
 to its")
 in the right image Modified")
13 Transforming the second image Image 2 Image 1 canvas H(x,y) y y x x f(x,y) g(x,y ) Forward warping: Send each pixel f(x,y) to its corresponding location (x,y ) = H(x,y) in the right image Modified from Alyosha Efros


 Disparity map D(x,y) image I (x,y ) So if")
14 Depth from disparity We have two images taken from cameras with different intrinsic and extrinsic parameters. How do we match a point in the first image to a point in the second? image I(x,y) Disparity map D(x,y) image I (x,y ) So if we could find the corresponding points in two images, we could estimate relative depth Kristen Grauman
 Note: All epipolar lines intersect at the")
15 Epipolar geometry: notation X x x Derek Hoiem Baseline line connecting the two camera centers Epipoles = intersections of baseline with image planes = projections of the other camera center Epipolar Plane plane containing baseline Epipolar Lines - intersections of epipolar plane with image planes (always come in corresponding pairs) Note: All epipolar lines intersect at the epipole.

16 Epipolar constraint The epipolar constraint is useful because it reduces the correspondence problem to a 1D search along an epipolar line. Kristen Grauman, image from Andrew Zisserman
17 X X Essential matrix T RX 0 [T ] RX 0 x Let E [T x] R XEX X T EX 0 E is called the essential matrix, and it relates corresponding image points between both cameras, given the rotation and translation. Before we said: If we observe a point in one image, its position in other image is constrained to lie on line defined by above. Turns out Ex is the epipolar line through x in the first image, corresp. to x. Note: these points are in camera coordinate systems. Kristen Grauman
 = f*t/(x-x ) Derek")
18 Basic stereo matching algorithm For each pixel in the first image Find corresponding epipolar scanline in the right image Search along epipolar line and pick the best match x Compute disparity x-x and set depth(x) = f*t/(x-x ) Derek Hoiem

19 Correspondence search Left Right scanline Matching cost disparity Slide a window along the right scanline and compare contents of that window with the reference window in the left image Matching cost: e.g. Euclidean distance Derek Hoiem

20 Geometry for a simple stereo system Assume parallel optical axes, known camera parameters (i.e., calibrated cameras). What is expression for Z? Similar triangles (p l, P, p r ) and (O l, P, O r ): T x l Z f x r T Z depth disparity Z f T x r x l Kristen Grauman
21 Results with window search Data Left image Right image Window-based matching Window-based matching Ground truth Ground truth Derek Hoiem
22 How can we improve? Uniqueness For any point in one image, there should be at most one matching point in the other image Ordering Corresponding points should be in the same order in both views Smoothness We expect disparity values to change slowly (for the most part) Derek Hoiem
23 Many of these constraints can be encoded in an energy function and solved using graph cuts Before Derek Hoiem Graph cuts Ground truth Y. Boykov, O. Veksler, and R. Zabih, Fast Approximate Energy Minimization via Graph Cuts, PAMI 2001 For the latest and greatest:
24 Projective structure from motion Given: m images of n fixed 3D points x ij = P i X j, i = 1,, m, j = 1,, n Problem: estimate m projection matrices P i and n 3D points X j from the mn corresponding 2D points x ij X j x 1j x 3j P 1 x 2j Svetlana Lazebnik P 2 P 3

25 Photo synth Noah Snavely, Steven M. Seitz, Richard Szeliski, "Photo tourism: Exploring photo collections in 3D," SIGGRAPH
26 3D from multiple images Building Rome in a Day: Agarwal et al. 2009
27 Recap: Epipoles Point x in left image corresponds to epipolar line l in right image Epipolar line passes through the epipole (the intersection of the cameras baseline with the image plane C C Derek Hoiem
28 Recap: Essential, Fundamental Matrices Fundamental matrix maps from a point in one image to a line in the other If x and x correspond to the same 3d point X: Essential matrix is like fundamental matrix but more constrained Adapted from Derek Hoiem


29 Recap: stereo with calibrated cameras Given image pair, R, T Detect some features Compute essential matrix E Match features using the epipolar and other constraints Triangulate for 3d structure and get depth Kristen Grauman
30 Texture representations
31 Correlation filtering Say the averaging window size is 2k+1 x 2k+1: Attribute uniform weight to each pixel Loop over all pixels in neighborhood around image pixel F[i,j] Now generalize to allow different weights depending on neighboring pixel s relative position: Non-uniform weights Kristen Grauman
32 Convolution vs. correlation Cross-correlation F u = -1, v = (i, j) Convolution H (0, 0)



33 Filters for computing gradients * = Slide credit: Derek Hoiem



34 Texture representation: example mean d/dx value mean d/dy value Win. # Win.# Win.# original image Kristen Grauman derivative filter responses, squared statistics to summarize patterns in small windows

35 Filter banks orientations scales Edges Bars What filters to put in the bank? Kristen Grauman Spots Typically we want a combination of scales and orientations, different types of patterns. Matlab code available for these examples:
![Matching with filters Goal: find in image Method 0: filter the image with eye patch g[ m, n] h[](/docs-images/96/127006189/images/36-1.jpg "k, l] k, l f [ m k, n l] f = image g = filter What went wrong? Derek Hoiem Input Filtered Image")
36 Matching with filters Goal: find in image Method 0: filter the image with eye patch g[ m, n] h[ k, l] k, l f [ m k, n l] f = image g = filter What went wrong? Derek Hoiem Input Filtered Image
) ( k, l Likes bright pixels where")
 True detections False detections Derek Hoiem Input Filtered Image")
37 Matching with filters Goal: find in image Method 1: filter the image with zero-mean eye g[ m, n] ( h[ k, l] mean( h)) ( k, l Likes bright pixels where filters are above average, dark pixels where filters are below average. f [ m k, n l]) True detections False detections Derek Hoiem Input Filtered Image (scaled) Thresholded Image
38 Kristen Grauman Showing magnitude of responses
39 Kristen Grauman

40 Kristen Grauman



41 Representing texture by mean abs response Filters Mean abs responses Derek Hoiem
42 Computing distances using texture Dimension 1 Dimension 2 a b #dim ) ( ), ( ) ( ) ( ), ( i a i b i b a D b a b a b a D Kristen Grauman
43 Feature detection: Harris
44 Corners as distinctive interest points We should easily recognize the keypoint by looking through a small window Shifting a window in any direction should give a large change in intensity flat region: no change in all directions A. Efros, D. Frolova, D. Simakov edge : no change along the edge direction corner : significant change in all directions
45 Harris Detector: Mathematics Window-averaged squared change of intensity induced by shifting the image data by [u,v]: Window function Shifted intensity Intensity Window function w(x,y) = or 1 in window, 0 outside Gaussian D. Frolova, D. Simakov

![to the error surface between a patch and itself, shifted by [u,v]:](/docs-images/96/127006189/images/46-2.jpg "where M is a 2 2 matrix computed from image derivatives: D. Frolova, D.")
46 Harris Detector: Mathematics Expanding I(x,y) in a Taylor series expansion, we have, for small shifts [u,v], a quadratic approximation to the error surface between a patch and itself, shifted by [u,v]: where M is a 2 2 matrix computed from image derivatives: D. Frolova, D. Simakov




47 y y y x y x x x I I I I I I I I y x w M ), ( x I I x y I I y y I x I I I y x Notation: K. Grauman Harris Detector: Mathematics
48 What does the matrix M reveal? Since M is symmetric, we have M X X 2 T Mx i x i i The eigenvalues of M reveal the amount of intensity change in the two principal orthogonal gradient directions in the window. K. Grauman
49 Corner response function edge : 1 >> 2 2 >> 1 corner : 1 and 2 are large, 1 ~ 2 flat region: 1 and 2 are small Adapted from A. Efros, D. Frolova, D. Simakov, K. Grauman
50 Harris Detector: Algorithm Compute image gradients Ix and Iy for all pixels For each pixel Compute by looping over neighbors x, y compute (k :empirical constant, k = ) Find points with large corner response function R (R > threshold) Take the points of locally maximum R as the detected feature points (i.e., pixels where R is bigger than for all the 4 or 8 neighbors) D. Frolova, D. Simakov 55

51 K. Grauman Example of Harris application
52 Feature detection: Scale-invariance
53 Invariance vs covariance A function is invariant under a certain family of transformations if its value does not change when a transformation from this family is applied to its argument. A function is covariant when it commutes with the transformation, i.e., applying the transformation to the argument of the function has the same effect as applying the transformation to the output of the function. [ ] [For example,] the area of a 2D surface is invariant under 2D rotations, since rotating a 2D surface does not make it any smaller or bigger. But the orientation of the major axis of inertia of the surface is covariant under the same family of transformations, since rotating a 2D surface will affect the orientation of its major axis in exactly the same way. Local Invariant Feature Detectors: A Survey by Tinne Tuytelaars and Krystian Mikolajczyk, in Foundations and Trends in Computer Graphics and Vision Vol. 3, No. 3 (2007) Chapter 1, 3.2, 7
54 What happens if: Affine intensity change Only derivatives are used => invariance to intensity shift I I + b Intensity scaling: I a I I a I + b R threshold R x (image coordinate) x (image coordinate) Partially invariant to affine intensity change L. Lazebnik
55 What happens if: Image translation Derivatives and window function are shift-invariant Corner location is covariant w.r.t. translation L. Lazebnik
56 What happens if: Image rotation Second moment ellipse rotates but its shape (i.e. eigenvalues) remains the same Corner location is covariant w.r.t. rotation L. Lazebnik
57 What happens if: Scaling Corner All points will be classified as edges Corner location is not covariant to scaling! L. Lazebnik
58 Scale Invariant Detection Problem: How do we choose corresponding circles independently in each image? Do objects in the image have a characteristic scale that we can identify? D. Frolova, D. Simakov
59 Scale Invariant Detection Solution: Design a function on the region which is scale invariant (has the same shape even if the image is resized) Take a local maximum of this function f Image 1 f Image 2 scale = 1/2 Adapted from A. Torralba s 1 s 2 region size region size
60 Automatic Scale Selection Function responses for increasing scale (scale signature) f ( I (, )) i i 1 x i i m f ( I 1 ( x, )) m K. Grauman, B. Leibe
61 Automatic Scale Selection Function responses for increasing scale (scale signature) f ( I (, )) i i 1 x i i m f ( I 1 ( x, )) m K. Grauman, B. Leibe

) m K. Grauman, B.")
62 Automatic Scale Selection Function responses for increasing scale (scale signature) f I (, )) i i i i m f ( I 1 ( x, )) m K. Grauman, B. Leibe ( 1 x


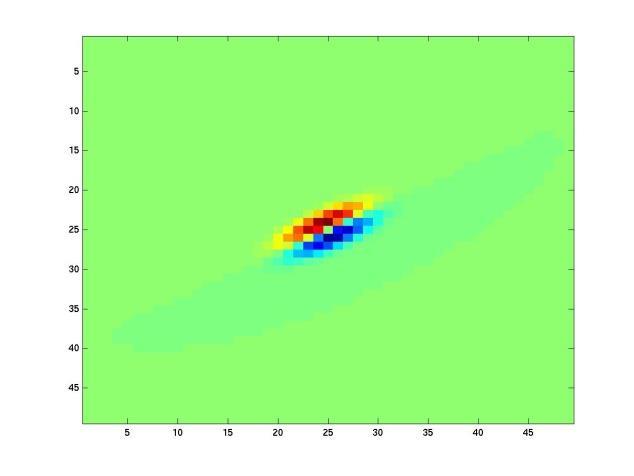
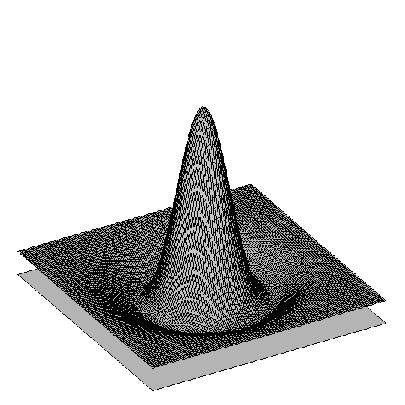
63 What Is A Useful Signature Function? Laplacian of Gaussian = blob detector K. Grauman, B. Leibe

64 Difference of Gaussian Laplacian We can approximate the Laplacian with a difference of Gaussians; more efficient to implement. 2 L Gxx x y Gyy x y (,, ) (,, ) (Laplacian) DoG G( x, y, k) G( x, y, ) (Difference of Gaussians)


65 Difference of Gaussian: Efficient computation Computation in Gaussian scale pyramid Sampling with step 4 =2 Original image K. Grauman, B. Leibe


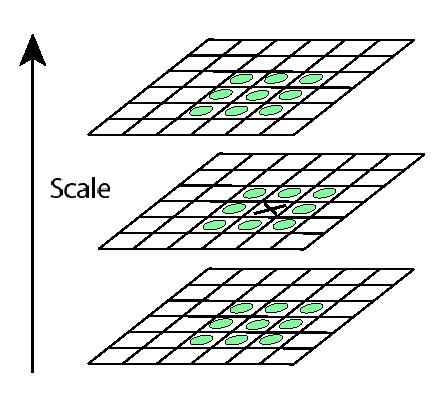
66 Find local maxima in position-scale space of Difference-of-Gaussian 5 Position-scale space: Adapted from K. Grauman, B. Leibe Find places where X greater than all of its neighbors (in green) List of (x, y, s)


67 Laplacian pyramid example Allows detection of increasingly coarse detail

68 Results: Difference-of-Gaussian K. Grauman, B. Leibe
69 Feature description
70 Gradients m(x, y) = sqrt(1 + 0) = 1 Θ(x, y) = atan(0/1) = 0

71 Scale Invariant Feature Transform Full version Divide the 16x16 window into a 4x4 grid of cells (2x2 case shown below) Quantize the gradient orientations i.e. snap each gradient to one of 8 angles Each gradient contributes not just 1, but magnitude(gradient) to the histogram, i.e. stronger gradients contribute more 16 cells * 8 orientations = 128 dimensional descriptor for each detected feature Adapted from L. Zitnick, D. Lowe
72 Scale Invariant Feature Transform Full version Divide the 16x16 window into a 4x4 grid of cells (2x2 case shown below) Quantize the gradient orientations i.e. snap each gradient to one of 8 angles Each gradient contributes not just 1, but magnitude(gradient) to the histogram, i.e. stronger gradients contribute more 16 cells * 8 orientations = 128 dimensional descriptor for each detected feature Normalize + clip (threshold normalize to 0.2) + normalize the descriptor After normalizing, we have: such that: 0.2 Adapted from L. Zitnick, D. Lowe


73 Making descriptor rotation invariant CSE 576: Computer Vision Rotate patch according to its dominant gradient orientation This puts the patches into a canonical orientation K. Grauman Image from Matthew Brown
74 Keypoint matching
75 Matching local features? Image 1 Image 2 To generate candidate matches, find patches that have the most similar appearance (e.g., lowest feature Euclidean distance) Simplest approach: compare them all, take the closest (or closest k, or within a thresholded distance) K. Grauman


76 Robust matching???? K. Grauman Image 1 Image 2 At what Euclidean distance value do we have a good match? To add robustness to matching, can consider ratio : distance to best match / distance to second best match If low, first match looks good. If high, could be ambiguous match.
77 Ratio: example Let q be the query from the first image, d1 be the closest match in the second image, and d2 be the second closest match Let dist(q, d1) and dist(q, d2) be the distances Let r = dist(q, d1) / dist(q, d2) What is the largest that r can be? What is the lowest that r can be? If r is 1, what do we know about the two distances? What about when r is 0.1?
78 Indexing local features: Setup When we see close points in feature space, we have similar descriptors, which indicates similar local content. Descriptor s feature space Query image K. Grauman Database images
79 Image matching


80 times appearing times appearing times appearing Describing images w/ visual words Summarize entire image based on its distribution (histogram) of word occurrences. Analogous to bag of words representation commonly used for documents. Feature patches: K. Grauman Visual words
81 Bag of visual words: Two uses 1. Represent the image 2. Using that representation, look for similar images 3. Can also use BOW to compute an inverted index, to simplify application #2

82 Visual words: main idea Extract some local features from a number of images e.g., SIFT descriptor space: each point is 128-dimensional D. Nister, CVPR 2006

83 D. Nister, CVPR 2006 Visual words: main idea
84 D. Nister, CVPR 2006 Quantize the space by grouping (clustering) the features. Note: For now, we ll treat clustering as a black box.
 Extract features in database images, cluster them to find words, make index 2.")

85 Inverted file index and bags of words similarity w (offline) Extract features in database images, cluster them to find words, make index 2. Extract words in query (extract features and map each to closest cluster center) 3. Use inverted file index to find frames relevant to query 4. For each relevant frame, rank them by comparing word counts (BOW) of query and frame Adapted from K. Grauman



: 5")

: = #")



86 precision Scoring retrieval quality Query Database size: 10 images Relevant (total): 5 images (e.g. images of Golden Gate) Results (ordered): precision = # returned relevant / # returned recall = # returned relevant / # total relevant Ondrej Chum recall
Epipolar Geometry and Stereo Vision
 CS 1699: Intro to Computer Vision Epipolar Geometry and Stereo Vision Prof. Adriana Kovashka University of Pittsburgh October 8, 2015 Today Review Projective transforms Image stitching (homography) Epipolar
CS 1699: Intro to Computer Vision Epipolar Geometry and Stereo Vision Prof. Adriana Kovashka University of Pittsburgh October 8, 2015 Today Review Projective transforms Image stitching (homography) Epipolar
Epipolar Geometry and Stereo Vision
 CS 1674: Intro to Computer Vision Epipolar Geometry and Stereo Vision Prof. Adriana Kovashka University of Pittsburgh October 5, 2016 Announcement Please send me three topics you want me to review next
CS 1674: Intro to Computer Vision Epipolar Geometry and Stereo Vision Prof. Adriana Kovashka University of Pittsburgh October 5, 2016 Announcement Please send me three topics you want me to review next
Local features: detection and description. Local invariant features
 Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
CS 2770: Intro to Computer Vision. Multiple Views. Prof. Adriana Kovashka University of Pittsburgh March 14, 2017
 CS 277: Intro to Computer Vision Multiple Views Prof. Adriana Kovashka Universit of Pittsburgh March 4, 27 Plan for toda Affine and projective image transformations Homographies and image mosaics Stereo
CS 277: Intro to Computer Vision Multiple Views Prof. Adriana Kovashka Universit of Pittsburgh March 4, 27 Plan for toda Affine and projective image transformations Homographies and image mosaics Stereo
Local features and image matching. Prof. Xin Yang HUST
 Local features and image matching Prof. Xin Yang HUST Last time RANSAC for robust geometric transformation estimation Translation, Affine, Homography Image warping Given a 2D transformation T and a source
Local features and image matching Prof. Xin Yang HUST Last time RANSAC for robust geometric transformation estimation Translation, Affine, Homography Image warping Given a 2D transformation T and a source
Local invariant features
 Local invariant features Tuesday, Oct 28 Kristen Grauman UT-Austin Today Some more Pset 2 results Pset 2 returned, pick up solutions Pset 3 is posted, due 11/11 Local invariant features Detection of interest
Local invariant features Tuesday, Oct 28 Kristen Grauman UT-Austin Today Some more Pset 2 results Pset 2 returned, pick up solutions Pset 3 is posted, due 11/11 Local invariant features Detection of interest
Local features: detection and description May 12 th, 2015
 Local features: detection and description May 12 th, 2015 Yong Jae Lee UC Davis Announcements PS1 grades up on SmartSite PS1 stats: Mean: 83.26 Standard Dev: 28.51 PS2 deadline extended to Saturday, 11:59
Local features: detection and description May 12 th, 2015 Yong Jae Lee UC Davis Announcements PS1 grades up on SmartSite PS1 stats: Mean: 83.26 Standard Dev: 28.51 PS2 deadline extended to Saturday, 11:59
Midterm Wed. Local features: detection and description. Today. Last time. Local features: main components. Goal: interest operator repeatability
 Midterm Wed. Local features: detection and description Monday March 7 Prof. UT Austin Covers material up until 3/1 Solutions to practice eam handed out today Bring a 8.5 11 sheet of notes if you want Review
Midterm Wed. Local features: detection and description Monday March 7 Prof. UT Austin Covers material up until 3/1 Solutions to practice eam handed out today Bring a 8.5 11 sheet of notes if you want Review
Epipolar Geometry and Stereo Vision
 Epipolar Geometry and Stereo Vision Computer Vision Shiv Ram Dubey, IIIT Sri City Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X
Epipolar Geometry and Stereo Vision Computer Vision Shiv Ram Dubey, IIIT Sri City Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X
Stereo. 11/02/2012 CS129, Brown James Hays. Slides by Kristen Grauman
 Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
Computer Vision for HCI. Topics of This Lecture
 Computer Vision for HCI Interest Points Topics of This Lecture Local Invariant Features Motivation Requirements, Invariances Keypoint Localization Features from Accelerated Segment Test (FAST) Harris Shi-Tomasi
Computer Vision for HCI Interest Points Topics of This Lecture Local Invariant Features Motivation Requirements, Invariances Keypoint Localization Features from Accelerated Segment Test (FAST) Harris Shi-Tomasi
Local Features: Detection, Description & Matching
 Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
Epipolar Geometry and Stereo Vision
 Epipolar Geometry and Stereo Vision Computer Vision Jia-Bin Huang, Virginia Tech Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X x
Epipolar Geometry and Stereo Vision Computer Vision Jia-Bin Huang, Virginia Tech Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X x
Wikipedia - Mysid
 Wikipedia - Mysid Erik Brynjolfsson, MIT Filtering Edges Corners Feature points Also called interest points, key points, etc. Often described as local features. Szeliski 4.1 Slides from Rick Szeliski,
Wikipedia - Mysid Erik Brynjolfsson, MIT Filtering Edges Corners Feature points Also called interest points, key points, etc. Often described as local features. Szeliski 4.1 Slides from Rick Szeliski,
Bias-Variance Trade-off (cont d) + Image Representations
 + Image Representations") CS 275: Machine Learning Bias-Variance Trade-off (cont d) + Image Representations Prof. Adriana Kovashka University of Pittsburgh January 2, 26 Announcement Homework now due Feb. Generalization Training
CS 275: Machine Learning Bias-Variance Trade-off (cont d) + Image Representations Prof. Adriana Kovashka University of Pittsburgh January 2, 26 Announcement Homework now due Feb. Generalization Training
Structure from Motion
 11/18/11 Structure from Motion Computer Vision CS 143, Brown James Hays Many slides adapted from Derek Hoiem, Lana Lazebnik, Silvio Saverese, Steve Seitz, and Martial Hebert This class: structure from
11/18/11 Structure from Motion Computer Vision CS 143, Brown James Hays Many slides adapted from Derek Hoiem, Lana Lazebnik, Silvio Saverese, Steve Seitz, and Martial Hebert This class: structure from
Fundamental matrix. Let p be a point in left image, p in right image. Epipolar relation. Epipolar mapping described by a 3x3 matrix F
 Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix F Fundamental
Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix F Fundamental
Ninio, J. and Stevens, K. A. (2000) Variations on the Hermann grid: an extinction illusion. Perception, 29,
 Variations on the Hermann grid: an extinction illusion. Perception, 29,") Ninio, J. and Stevens, K. A. (2000) Variations on the Hermann grid: an extinction illusion. Perception, 29, 1209-1217. CS 4495 Computer Vision A. Bobick Sparse to Dense Correspodence Building Rome in
Ninio, J. and Stevens, K. A. (2000) Variations on the Hermann grid: an extinction illusion. Perception, 29, 1209-1217. CS 4495 Computer Vision A. Bobick Sparse to Dense Correspodence Building Rome in
Motion Estimation and Optical Flow Tracking
 Image Matching Image Retrieval Object Recognition Motion Estimation and Optical Flow Tracking Example: Mosiacing (Panorama) M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 Example 3D Reconstruction
Image Matching Image Retrieval Object Recognition Motion Estimation and Optical Flow Tracking Example: Mosiacing (Panorama) M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 Example 3D Reconstruction
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Feature Based Registration - Image Alignment
 Feature Based Registration - Image Alignment Image Registration Image registration is the process of estimating an optimal transformation between two or more images. Many slides from Alexei Efros http://graphics.cs.cmu.edu/courses/15-463/2007_fall/463.html
Feature Based Registration - Image Alignment Image Registration Image registration is the process of estimating an optimal transformation between two or more images. Many slides from Alexei Efros http://graphics.cs.cmu.edu/courses/15-463/2007_fall/463.html
Image matching. Announcements. Harder case. Even harder case. Project 1 Out today Help session at the end of class. by Diva Sian.
 Announcements Project 1 Out today Help session at the end of class Image matching by Diva Sian by swashford Harder case Even harder case How the Afghan Girl was Identified by Her Iris Patterns Read the
Announcements Project 1 Out today Help session at the end of class Image matching by Diva Sian by swashford Harder case Even harder case How the Afghan Girl was Identified by Her Iris Patterns Read the
Harder case. Image matching. Even harder case. Harder still? by Diva Sian. by swashford
 Image matching Harder case by Diva Sian by Diva Sian by scgbt by swashford Even harder case Harder still? How the Afghan Girl was Identified by Her Iris Patterns Read the story NASA Mars Rover images Answer
Image matching Harder case by Diva Sian by Diva Sian by scgbt by swashford Even harder case Harder still? How the Afghan Girl was Identified by Her Iris Patterns Read the story NASA Mars Rover images Answer
Stitching and Blending
 Stitching and Blending Kari Pulli VP Computational Imaging Light First project Build your own (basic) programs panorama HDR (really, exposure fusion) The key components register images so their features
Stitching and Blending Kari Pulli VP Computational Imaging Light First project Build your own (basic) programs panorama HDR (really, exposure fusion) The key components register images so their features
Lecture 6: Finding Features (part 1/2)
") Lecture 6: Finding Features (part 1/2) Dr. Juan Carlos Niebles Stanford AI Lab Professor Stanford Vision Lab 1 What we will learn today? Local invariant features MoOvaOon Requirements, invariances Keypoint
Lecture 6: Finding Features (part 1/2) Dr. Juan Carlos Niebles Stanford AI Lab Professor Stanford Vision Lab 1 What we will learn today? Local invariant features MoOvaOon Requirements, invariances Keypoint
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Mosaics. Today s Readings
 Mosaics VR Seattle: http://www.vrseattle.com/ Full screen panoramas (cubic): http://www.panoramas.dk/ Mars: http://www.panoramas.dk/fullscreen3/f2_mars97.html Today s Readings Szeliski and Shum paper (sections
Mosaics VR Seattle: http://www.vrseattle.com/ Full screen panoramas (cubic): http://www.panoramas.dk/ Mars: http://www.panoramas.dk/fullscreen3/f2_mars97.html Today s Readings Szeliski and Shum paper (sections
Stereo II CSE 576. Ali Farhadi. Several slides from Larry Zitnick and Steve Seitz
 Stereo II CSE 576 Ali Farhadi Several slides from Larry Zitnick and Steve Seitz Camera parameters A camera is described by several parameters Translation T of the optical center from the origin of world
Stereo II CSE 576 Ali Farhadi Several slides from Larry Zitnick and Steve Seitz Camera parameters A camera is described by several parameters Translation T of the optical center from the origin of world
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.
 CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Section 10 - Detectors part II Descriptors Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Section 10 - Detectors part II Descriptors Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering
Local Feature Detectors
 Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014
 SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
Stereo. Outline. Multiple views 3/29/2017. Thurs Mar 30 Kristen Grauman UT Austin. Multi-view geometry, matching, invariant features, stereo vision
 Stereo Thurs Mar 30 Kristen Grauman UT Austin Outline Last time: Human stereopsis Epipolar geometry and the epipolar constraint Case example with parallel optical axes General case with calibrated cameras
Stereo Thurs Mar 30 Kristen Grauman UT Austin Outline Last time: Human stereopsis Epipolar geometry and the epipolar constraint Case example with parallel optical axes General case with calibrated cameras
CS4670: Computer Vision
 CS4670: Computer Vision Noah Snavely Lecture 6: Feature matching and alignment Szeliski: Chapter 6.1 Reading Last time: Corners and blobs Scale-space blob detector: Example Feature descriptors We know
CS4670: Computer Vision Noah Snavely Lecture 6: Feature matching and alignment Szeliski: Chapter 6.1 Reading Last time: Corners and blobs Scale-space blob detector: Example Feature descriptors We know
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely Lecture 4: Harris corner detection Szeliski: 4.1 Reading Announcements Project 1 (Hybrid Images) code due next Wednesday, Feb 14, by 11:59pm Artifacts due Friday, Feb
CS5670: Computer Vision Noah Snavely Lecture 4: Harris corner detection Szeliski: 4.1 Reading Announcements Project 1 (Hybrid Images) code due next Wednesday, Feb 14, by 11:59pm Artifacts due Friday, Feb
Computer Vision Lecture 17
 Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Image warping and stitching
 Image warping and stitching Thurs Oct 15 Last time Feature-based alignment 2D transformations Affine fit RANSAC 1 Robust feature-based alignment Extract features Compute putative matches Loop: Hypothesize
Image warping and stitching Thurs Oct 15 Last time Feature-based alignment 2D transformations Affine fit RANSAC 1 Robust feature-based alignment Extract features Compute putative matches Loop: Hypothesize
Motion illusion, rotating snakes
 Motion illusion, rotating snakes Local features: main components 1) Detection: Find a set of distinctive key points. 2) Description: Extract feature descriptor around each interest point as vector. x 1
Motion illusion, rotating snakes Local features: main components 1) Detection: Find a set of distinctive key points. 2) Description: Extract feature descriptor around each interest point as vector. x 1
Building a Panorama. Matching features. Matching with Features. How do we build a panorama? Computational Photography, 6.882
 Matching features Building a Panorama Computational Photography, 6.88 Prof. Bill Freeman April 11, 006 Image and shape descriptors: Harris corner detectors and SIFT features. Suggested readings: Mikolajczyk
Matching features Building a Panorama Computational Photography, 6.88 Prof. Bill Freeman April 11, 006 Image and shape descriptors: Harris corner detectors and SIFT features. Suggested readings: Mikolajczyk
Prof. Feng Liu. Spring /26/2017
 Prof. Feng Liu Spring 2017 http://www.cs.pdx.edu/~fliu/courses/cs510/ 04/26/2017 Last Time Re-lighting HDR 2 Today Panorama Overview Feature detection Mid-term project presentation Not real mid-term 6
Prof. Feng Liu Spring 2017 http://www.cs.pdx.edu/~fliu/courses/cs510/ 04/26/2017 Last Time Re-lighting HDR 2 Today Panorama Overview Feature detection Mid-term project presentation Not real mid-term 6
Harder case. Image matching. Even harder case. Harder still? by Diva Sian. by swashford
 Image matching Harder case by Diva Sian by Diva Sian by scgbt by swashford Even harder case Harder still? How the Afghan Girl was Identified by Her Iris Patterns Read the story NASA Mars Rover images Answer
Image matching Harder case by Diva Sian by Diva Sian by scgbt by swashford Even harder case Harder still? How the Afghan Girl was Identified by Her Iris Patterns Read the story NASA Mars Rover images Answer
BSB663 Image Processing Pinar Duygulu. Slides are adapted from Selim Aksoy
 BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
Computer Vision Lecture 17
 Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Lecture: RANSAC and feature detectors
 Lecture: RANSAC and feature detectors Juan Carlos Niebles and Ranjay Krishna Stanford Vision and Learning Lab 1 What we will learn today? A model fitting method for edge detection RANSAC Local invariant
Lecture: RANSAC and feature detectors Juan Carlos Niebles and Ranjay Krishna Stanford Vision and Learning Lab 1 What we will learn today? A model fitting method for edge detection RANSAC Local invariant
Homographies and RANSAC
 Homographies and RANSAC Computer vision 6.869 Bill Freeman and Antonio Torralba March 30, 2011 Homographies and RANSAC Homographies RANSAC Building panoramas Phototourism 2 Depth-based ambiguity of position
Homographies and RANSAC Computer vision 6.869 Bill Freeman and Antonio Torralba March 30, 2011 Homographies and RANSAC Homographies RANSAC Building panoramas Phototourism 2 Depth-based ambiguity of position
Image Stitching. Slides from Rick Szeliski, Steve Seitz, Derek Hoiem, Ira Kemelmacher, Ali Farhadi
 Image Stitching Slides from Rick Szeliski, Steve Seitz, Derek Hoiem, Ira Kemelmacher, Ali Farhadi Combine two or more overlapping images to make one larger image Add example Slide credit: Vaibhav Vaish
Image Stitching Slides from Rick Szeliski, Steve Seitz, Derek Hoiem, Ira Kemelmacher, Ali Farhadi Combine two or more overlapping images to make one larger image Add example Slide credit: Vaibhav Vaish
CS 558: Computer Vision 4 th Set of Notes
 1 CS 558: Computer Vision 4 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Overview Keypoint matching Hessian
1 CS 558: Computer Vision 4 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Overview Keypoint matching Hessian
Local Image Features
 Local Image Features Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial This section: correspondence and alignment
Local Image Features Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial This section: correspondence and alignment
Automatic Image Alignment
 Automatic Image Alignment with a lot of slides stolen from Steve Seitz and Rick Szeliski Mike Nese CS194: Image Manipulation & Computational Photography Alexei Efros, UC Berkeley, Fall 2018 Live Homography
Automatic Image Alignment with a lot of slides stolen from Steve Seitz and Rick Szeliski Mike Nese CS194: Image Manipulation & Computational Photography Alexei Efros, UC Berkeley, Fall 2018 Live Homography
The SIFT (Scale Invariant Feature
 The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
Local features and image matching May 8 th, 2018
 Local features and image matcing May 8 t, 2018 Yong Jae Lee UC Davis Last time RANSAC for robust fitting Lines, translation Image mosaics Fitting a 2D transformation Homograpy 2 Today Mosaics recap: How
Local features and image matcing May 8 t, 2018 Yong Jae Lee UC Davis Last time RANSAC for robust fitting Lines, translation Image mosaics Fitting a 2D transformation Homograpy 2 Today Mosaics recap: How
Camera Geometry II. COS 429 Princeton University
 Camera Geometry II COS 429 Princeton University Outline Projective geometry Vanishing points Application: camera calibration Application: single-view metrology Epipolar geometry Application: stereo correspondence
Camera Geometry II COS 429 Princeton University Outline Projective geometry Vanishing points Application: camera calibration Application: single-view metrology Epipolar geometry Application: stereo correspondence
Image warping and stitching
 Image warping and stitching May 4 th, 2017 Yong Jae Lee UC Davis Last time Interactive segmentation Feature-based alignment 2D transformations Affine fit RANSAC 2 Alignment problem In alignment, we will
Image warping and stitching May 4 th, 2017 Yong Jae Lee UC Davis Last time Interactive segmentation Feature-based alignment 2D transformations Affine fit RANSAC 2 Alignment problem In alignment, we will
Computer Vision. Recap: Smoothing with a Gaussian. Recap: Effect of σ on derivatives. Computer Science Tripos Part II. Dr Christopher Town
 Recap: Smoothing with a Gaussian Computer Vision Computer Science Tripos Part II Dr Christopher Town Recall: parameter σ is the scale / width / spread of the Gaussian kernel, and controls the amount of
Recap: Smoothing with a Gaussian Computer Vision Computer Science Tripos Part II Dr Christopher Town Recall: parameter σ is the scale / width / spread of the Gaussian kernel, and controls the amount of
Structure from Motion
 /8/ Structure from Motion Computer Vision CS 43, Brown James Hays Many slides adapted from Derek Hoiem, Lana Lazebnik, Silvio Saverese, Steve Seitz, and Martial Hebert This class: structure from motion
/8/ Structure from Motion Computer Vision CS 43, Brown James Hays Many slides adapted from Derek Hoiem, Lana Lazebnik, Silvio Saverese, Steve Seitz, and Martial Hebert This class: structure from motion
Edge and corner detection
 Edge and corner detection Prof. Stricker Doz. G. Bleser Computer Vision: Object and People Tracking Goals Where is the information in an image? How is an object characterized? How can I find measurements
Edge and corner detection Prof. Stricker Doz. G. Bleser Computer Vision: Object and People Tracking Goals Where is the information in an image? How is an object characterized? How can I find measurements
N-Views (1) Homographies and Projection
 Homographies and Projection") CS 4495 Computer Vision N-Views (1) Homographies and Projection Aaron Bobick School of Interactive Computing Administrivia PS 2: Get SDD and Normalized Correlation working for a given windows size say
CS 4495 Computer Vision N-Views (1) Homographies and Projection Aaron Bobick School of Interactive Computing Administrivia PS 2: Get SDD and Normalized Correlation working for a given windows size say
EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT. Recap and Outline
 EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT Oct. 15, 2013 Prof. Ronald Fearing Electrical Engineering and Computer Sciences University of California, Berkeley (slides courtesy of Prof. John Wawrzynek)
EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT Oct. 15, 2013 Prof. Ronald Fearing Electrical Engineering and Computer Sciences University of California, Berkeley (slides courtesy of Prof. John Wawrzynek)
Patch Descriptors. EE/CSE 576 Linda Shapiro
 Patch Descriptors EE/CSE 576 Linda Shapiro 1 How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Patch Descriptors EE/CSE 576 Linda Shapiro 1 How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
CS223b Midterm Exam, Computer Vision. Monday February 25th, Winter 2008, Prof. Jana Kosecka
 CS223b Midterm Exam, Computer Vision Monday February 25th, Winter 2008, Prof. Jana Kosecka Your name email This exam is 8 pages long including cover page. Make sure your exam is not missing any pages.
CS223b Midterm Exam, Computer Vision Monday February 25th, Winter 2008, Prof. Jana Kosecka Your name email This exam is 8 pages long including cover page. Make sure your exam is not missing any pages.
Augmented Reality VU. Computer Vision 3D Registration (2) Prof. Vincent Lepetit
 Prof. Vincent Lepetit") Augmented Reality VU Computer Vision 3D Registration (2) Prof. Vincent Lepetit Feature Point-Based 3D Tracking Feature Points for 3D Tracking Much less ambiguous than edges; Point-to-point reprojection
Augmented Reality VU Computer Vision 3D Registration (2) Prof. Vincent Lepetit Feature Point-Based 3D Tracking Feature Points for 3D Tracking Much less ambiguous than edges; Point-to-point reprojection
Texture Representation + Image Pyramids
 CS 1674: Intro to Computer Vision Texture Representation + Image Pyramids Prof. Adriana Kovashka University of Pittsburgh September 14, 2016 Reminders/Announcements HW2P due tonight, 11:59pm HW3W, HW3P
CS 1674: Intro to Computer Vision Texture Representation + Image Pyramids Prof. Adriana Kovashka University of Pittsburgh September 14, 2016 Reminders/Announcements HW2P due tonight, 11:59pm HW3W, HW3P
Lecture 10: Multi-view geometry
 Lecture 10: Multi-view geometry Professor Stanford Vision Lab 1 What we will learn today? Review for stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Lecture 10: Multi-view geometry Professor Stanford Vision Lab 1 What we will learn today? Review for stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Lecture 10: Multi view geometry
 Lecture 10: Multi view geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Lecture 10: Multi view geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Image warping and stitching
 Image warping and stitching May 5 th, 2015 Yong Jae Lee UC Davis PS2 due next Friday Announcements 2 Last time Interactive segmentation Feature-based alignment 2D transformations Affine fit RANSAC 3 Alignment
Image warping and stitching May 5 th, 2015 Yong Jae Lee UC Davis PS2 due next Friday Announcements 2 Last time Interactive segmentation Feature-based alignment 2D transformations Affine fit RANSAC 3 Alignment
BIL Computer Vision Apr 16, 2014
 BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
CS 4495 Computer Vision A. Bobick. CS 4495 Computer Vision. Features 2 SIFT descriptor. Aaron Bobick School of Interactive Computing
 CS 4495 Computer Vision Features 2 SIFT descriptor Aaron Bobick School of Interactive Computing Administrivia PS 3: Out due Oct 6 th. Features recap: Goal is to find corresponding locations in two images.
CS 4495 Computer Vision Features 2 SIFT descriptor Aaron Bobick School of Interactive Computing Administrivia PS 3: Out due Oct 6 th. Features recap: Goal is to find corresponding locations in two images.
Local Image Features
 Local Image Features Computer Vision Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Flashed Face Distortion 2nd Place in the 8th Annual Best
Local Image Features Computer Vision Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Flashed Face Distortion 2nd Place in the 8th Annual Best
Multi-stable Perception. Necker Cube
 Multi-stable Perception Necker Cube Spinning dancer illusion, Nobuyuki Kayahara Multiple view geometry Stereo vision Epipolar geometry Lowe Hartley and Zisserman Depth map extraction Essential matrix
Multi-stable Perception Necker Cube Spinning dancer illusion, Nobuyuki Kayahara Multiple view geometry Stereo vision Epipolar geometry Lowe Hartley and Zisserman Depth map extraction Essential matrix
CAP 5415 Computer Vision Fall 2012
 CAP 5415 Computer Vision Fall 01 Dr. Mubarak Shah Univ. of Central Florida Office 47-F HEC Lecture-5 SIFT: David Lowe, UBC SIFT - Key Point Extraction Stands for scale invariant feature transform Patented
CAP 5415 Computer Vision Fall 01 Dr. Mubarak Shah Univ. of Central Florida Office 47-F HEC Lecture-5 SIFT: David Lowe, UBC SIFT - Key Point Extraction Stands for scale invariant feature transform Patented
Image Features. Work on project 1. All is Vanity, by C. Allan Gilbert,
 Image Features Work on project 1 All is Vanity, by C. Allan Gilbert, 1873-1929 Feature extrac*on: Corners and blobs c Mo*va*on: Automa*c panoramas Credit: Ma9 Brown Why extract features? Mo*va*on: panorama
Image Features Work on project 1 All is Vanity, by C. Allan Gilbert, 1873-1929 Feature extrac*on: Corners and blobs c Mo*va*on: Automa*c panoramas Credit: Ma9 Brown Why extract features? Mo*va*on: panorama
Stereo Vision. MAN-522 Computer Vision
 Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
Chaplin, Modern Times, 1936
 Chaplin, Modern Times, 1936 [A Bucket of Water and a Glass Matte: Special Effects in Modern Times; bonus feature on The Criterion Collection set] Multi-view geometry problems Structure: Given projections
Chaplin, Modern Times, 1936 [A Bucket of Water and a Glass Matte: Special Effects in Modern Times; bonus feature on The Criterion Collection set] Multi-view geometry problems Structure: Given projections
Automatic Image Alignment
 Automatic Image Alignment Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2010 Live Homography DEMO Check out panoramio.com
Automatic Image Alignment Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2010 Live Homography DEMO Check out panoramio.com
Final project bits and pieces
 Final project bits and pieces The project is expected to take four weeks of time for up to four people. At 12 hours per week per person that comes out to: ~192 hours of work for a four person team. Capstone:
Final project bits and pieces The project is expected to take four weeks of time for up to four people. At 12 hours per week per person that comes out to: ~192 hours of work for a four person team. Capstone:
Recap: Features and filters. Recap: Grouping & fitting. Now: Multiple views 10/29/2008. Epipolar geometry & stereo vision. Why multiple views?
 Recap: Features and filters Epipolar geometry & stereo vision Tuesday, Oct 21 Kristen Grauman UT-Austin Transforming and describing images; textures, colors, edges Recap: Grouping & fitting Now: Multiple
Recap: Features and filters Epipolar geometry & stereo vision Tuesday, Oct 21 Kristen Grauman UT-Austin Transforming and describing images; textures, colors, edges Recap: Grouping & fitting Now: Multiple
Feature descriptors and matching
 Feature descriptors and matching Detections at multiple scales Invariance of MOPS Intensity Scale Rotation Color and Lighting Out-of-plane rotation Out-of-plane rotation Better representation than color:
Feature descriptors and matching Detections at multiple scales Invariance of MOPS Intensity Scale Rotation Color and Lighting Out-of-plane rotation Out-of-plane rotation Better representation than color:
Computer Vision Lecture 20
 Computer Perceptual Vision and Sensory WS 16/17 Augmented Computing Computer Perceptual Vision and Sensory WS 16/17 Augmented Computing Computer Perceptual Vision and Sensory WS 16/17 Augmented Computing
Computer Perceptual Vision and Sensory WS 16/17 Augmented Computing Computer Perceptual Vision and Sensory WS 16/17 Augmented Computing Computer Perceptual Vision and Sensory WS 16/17 Augmented Computing
Image Rectification (Stereo) (New book: 7.2.1, old book: 11.1)
 (New book: 7.2.1, old book: 11.1)") Image Rectification (Stereo) (New book: 7.2.1, old book: 11.1) Guido Gerig CS 6320 Spring 2013 Credits: Prof. Mubarak Shah, Course notes modified from: http://www.cs.ucf.edu/courses/cap6411/cap5415/, Lecture
Image Rectification (Stereo) (New book: 7.2.1, old book: 11.1) Guido Gerig CS 6320 Spring 2013 Credits: Prof. Mubarak Shah, Course notes modified from: http://www.cs.ucf.edu/courses/cap6411/cap5415/, Lecture
Automatic Image Alignment (feature-based)
") Automatic Image Alignment (feature-based) Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2006 Today s lecture Feature
Automatic Image Alignment (feature-based) Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2006 Today s lecture Feature
Features Points. Andrea Torsello DAIS Università Ca Foscari via Torino 155, Mestre (VE)
") Features Points Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Finding Corners Edge detectors perform poorly at corners. Corners provide repeatable points for matching, so
Features Points Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Finding Corners Edge detectors perform poorly at corners. Corners provide repeatable points for matching, so
Computer Vision Lecture 20
 Computer Perceptual Vision and Sensory WS 16/76 Augmented Computing Many slides adapted from K. Grauman, S. Seitz, R. Szeliski, M. Pollefeys, S. Lazebnik Computer Vision Lecture 20 Motion and Optical Flow
Computer Perceptual Vision and Sensory WS 16/76 Augmented Computing Many slides adapted from K. Grauman, S. Seitz, R. Szeliski, M. Pollefeys, S. Lazebnik Computer Vision Lecture 20 Motion and Optical Flow
Local Image Features
 Local Image Features Ali Borji UWM Many slides from James Hayes, Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Overview of Keypoint Matching 1. Find a set of distinctive key- points A 1 A 2 A 3 B 3
Local Image Features Ali Borji UWM Many slides from James Hayes, Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Overview of Keypoint Matching 1. Find a set of distinctive key- points A 1 A 2 A 3 B 3
AK Computer Vision Feature Point Detectors and Descriptors
 AK Computer Vision Feature Point Detectors and Descriptors 1 Feature Point Detectors and Descriptors: Motivation 2 Step 1: Detect local features should be invariant to scale and rotation, or perspective
AK Computer Vision Feature Point Detectors and Descriptors 1 Feature Point Detectors and Descriptors: Motivation 2 Step 1: Detect local features should be invariant to scale and rotation, or perspective
Patch Descriptors. CSE 455 Linda Shapiro
 Patch Descriptors CSE 455 Linda Shapiro How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Patch Descriptors CSE 455 Linda Shapiro How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Visual Tracking (1) Tracking of Feature Points and Planar Rigid Objects
 Tracking of Feature Points and Planar Rigid Objects") Intelligent Control Systems Visual Tracking (1) Tracking of Feature Points and Planar Rigid Objects Shingo Kagami Graduate School of Information Sciences, Tohoku University swk(at)ic.is.tohoku.ac.jp http://www.ic.is.tohoku.ac.jp/ja/swk/
Intelligent Control Systems Visual Tracking (1) Tracking of Feature Points and Planar Rigid Objects Shingo Kagami Graduate School of Information Sciences, Tohoku University swk(at)ic.is.tohoku.ac.jp http://www.ic.is.tohoku.ac.jp/ja/swk/
Image Warping and Mosacing
 Image Warping and Mosacing 15-463: Rendering and Image Processing Alexei Efros with a lot of slides stolen from Steve Seitz and Rick Szeliski Today Mosacs Image Warping Homographies Programming Assignment
Image Warping and Mosacing 15-463: Rendering and Image Processing Alexei Efros with a lot of slides stolen from Steve Seitz and Rick Szeliski Today Mosacs Image Warping Homographies Programming Assignment
EXAM SOLUTIONS. Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006,
 School of Computer Science and Communication, KTH Danica Kragic EXAM SOLUTIONS Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006, 14.00 19.00 Grade table 0-25 U 26-35 3 36-45
School of Computer Science and Communication, KTH Danica Kragic EXAM SOLUTIONS Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006, 14.00 19.00 Grade table 0-25 U 26-35 3 36-45
Two-view geometry Computer Vision Spring 2018, Lecture 10
 Two-view geometry http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 10 Course announcements Homework 2 is due on February 23 rd. - Any questions about the homework? - How many of
Two-view geometry http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 10 Course announcements Homework 2 is due on February 23 rd. - Any questions about the homework? - How many of
Recovering structure from a single view Pinhole perspective projection
 EPIPOLAR GEOMETRY The slides are from several sources through James Hays (Brown); Silvio Savarese (U. of Michigan); Svetlana Lazebnik (U. Illinois); Bill Freeman and Antonio Torralba (MIT), including their
EPIPOLAR GEOMETRY The slides are from several sources through James Hays (Brown); Silvio Savarese (U. of Michigan); Svetlana Lazebnik (U. Illinois); Bill Freeman and Antonio Torralba (MIT), including their
Camera Calibration. Schedule. Jesus J Caban. Note: You have until next Monday to let me know. ! Today:! Camera calibration
 Camera Calibration Jesus J Caban Schedule! Today:! Camera calibration! Wednesday:! Lecture: Motion & Optical Flow! Monday:! Lecture: Medical Imaging! Final presentations:! Nov 29 th : W. Griffin! Dec 1
Camera Calibration Jesus J Caban Schedule! Today:! Camera calibration! Wednesday:! Lecture: Motion & Optical Flow! Monday:! Lecture: Medical Imaging! Final presentations:! Nov 29 th : W. Griffin! Dec 1
Stereo CSE 576. Ali Farhadi. Several slides from Larry Zitnick and Steve Seitz
 Stereo CSE 576 Ali Farhadi Several slides from Larry Zitnick and Steve Seitz Why do we perceive depth? What do humans use as depth cues? Motion Convergence When watching an object close to us, our eyes
Stereo CSE 576 Ali Farhadi Several slides from Larry Zitnick and Steve Seitz Why do we perceive depth? What do humans use as depth cues? Motion Convergence When watching an object close to us, our eyes
Final Exam Study Guide
 Final Exam Study Guide Exam Window: 28th April, 12:00am EST to 30th April, 11:59pm EST Description As indicated in class the goal of the exam is to encourage you to review the material from the course.
Final Exam Study Guide Exam Window: 28th April, 12:00am EST to 30th April, 11:59pm EST Description As indicated in class the goal of the exam is to encourage you to review the material from the course.
Colorado School of Mines. Computer Vision. Professor William Hoff Dept of Electrical Engineering &Computer Science.
 Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Object Recognition in Large Databases Some material for these slides comes from www.cs.utexas.edu/~grauman/courses/spring2011/slides/lecture18_index.pptx
Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Object Recognition in Large Databases Some material for these slides comes from www.cs.utexas.edu/~grauman/courses/spring2011/slides/lecture18_index.pptx
Scale Invariant Feature Transform
 Why do we care about matching features? Scale Invariant Feature Transform Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Automatic
Why do we care about matching features? Scale Invariant Feature Transform Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Automatic
Stereo: Disparity and Matching
 CS 4495 Computer Vision Aaron Bobick School of Interactive Computing Administrivia PS2 is out. But I was late. So we pushed the due date to Wed Sept 24 th, 11:55pm. There is still *no* grace period. To
CS 4495 Computer Vision Aaron Bobick School of Interactive Computing Administrivia PS2 is out. But I was late. So we pushed the due date to Wed Sept 24 th, 11:55pm. There is still *no* grace period. To
Feature descriptors. Alain Pagani Prof. Didier Stricker. Computer Vision: Object and People Tracking
 Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Feature Detection. Raul Queiroz Feitosa. 3/30/2017 Feature Detection 1
 Feature Detection Raul Queiroz Feitosa 3/30/2017 Feature Detection 1 Objetive This chapter discusses the correspondence problem and presents approaches to solve it. 3/30/2017 Feature Detection 2 Outline
Feature Detection Raul Queiroz Feitosa 3/30/2017 Feature Detection 1 Objetive This chapter discusses the correspondence problem and presents approaches to solve it. 3/30/2017 Feature Detection 2 Outline
Scale Invariant Feature Transform
 Scale Invariant Feature Transform Why do we care about matching features? Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Image
Scale Invariant Feature Transform Why do we care about matching features? Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Image
Automatic Image Alignment (direct) with a lot of slides stolen from Steve Seitz and Rick Szeliski
 with a lot of slides stolen from Steve Seitz and Rick Szeliski") Automatic Image Alignment (direct) with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 Today Go over Midterm Go over Project #3
Automatic Image Alignment (direct) with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 Today Go over Midterm Go over Project #3
Feature Detection and Matching
 and Matching CS4243 Computer Vision and Pattern Recognition Leow Wee Kheng Department of Computer Science School of Computing National University of Singapore Leow Wee Kheng (CS4243) Camera Models 1 /
and Matching CS4243 Computer Vision and Pattern Recognition Leow Wee Kheng Department of Computer Science School of Computing National University of Singapore Leow Wee Kheng (CS4243) Camera Models 1 /