arxiv: v1 [cs.cv] 24 Feb 2014
|
|
|
- Noreen Fox
- 5 years ago
- Views:
Transcription


 detectors.")


1 EXEMPLAR-BASED LINEAR DISCRIMINANT ANALYSIS FOR ROBUST OBJECT TRACKING Changxin Gao, Feifei Chen, Jin-Gang Yu, Rui Huang, Nong Sang arxiv: v1 [cs.cv] 24 Feb 2014 Science and Technology on Multi-spectral Information Processing Laboratory, School of Automation, Huazhong University of Science and Technology, Wuhan, , China ABSTRACT Tracking-by-detection has become an attractive tracking technique, which treats tracking as a category detection problem. However, the task in tracking is to search for a specific object, rather than an object category as in detection. In this paper, we propose a novel tracking framework based on exemplar detector rather than category detector. The proposed tracker is an ensemble of exemplar-based linear discriminant analysis (ELDA) detectors. Each detector is quite specific and discriminative, because it is trained by a single object instance and massive negatives. To improve its adaptivity, we update both object and background models. Experimental results on several challenging video sequences demonstrate the effectiveness and robustness of our tracking algorithm. Index Terms Exemplar, Linear Discriminant Analysis (LDA), Object tracking, Model updating 1. INTRODUCTION Visual tracking plays a key role in many computer vision applications, such as surveillance, HCI, video editing, etc. It has been studied intensively during the past decades [1], the problem in general still remains challenging due to various factors such as appearance, pose, and scale change of objects, occlusion of objects, illumination variations, cluttered scenes, presence of similar objects, etc. Recently, tracking-by-detection method has become an attractive tracking technique [2, 3, 4, 5, 6], which treats tracking as a classification problem and trains a detector to separate the object from the background. Good performance has been shown following this strategy, by borrowing some techniques from object detection methods [3, 5, 7, 8, 9, 10]. Furthermore, Stalder et al. discussed the relationship of tracking, detection, and recognition in [11]. However, the task in tracking is different from that in detection, that is, finding a specific object instance in tracking, while finding an object category in detection. Therefore, we suppose that tracking should be based on object exemplar rather than category. That is to say, we should design a specific, and Sampling Short-term Object Model Sliding Time Window Long-term Object Model Exemplar from the 1st frame Online Background Model Online updating Background Model ELDA Learners Offline Background Model Fig. 1. An overview of the ELDA tracking algorithm. ELDA tracker consists of two object models (long-term object model and short-term object model), and two background models (off-line background model and online background model). The proposed method builds a single ELDA learner for each sample in object model, with both off-line and online background samples. The figure is best viewed in color. more restrictive detector for the object instance to be tracked, rather than a category-based detector. To this end, we present an Exemplar-based Linear Discriminant Analysis (ELDA) model for visual tracking. Exemplar-based learner is supposed to be extremely discriminative, because the it is trained by a single object instance and massive amounts of negative samples. Malisiewicz et al. proposed exemplar-based support vector machine (SVM) algorithm for object detection in [12]. However, training an exemplar-based SVM, by mining for hard negative exemplars, is quite expensive. Linear Discriminant Analysis (LDA) technique is introduced to improve the speed of training and testing [13], which enables exemplar-based method to be used in tracking task. ELDA algorithm consists of two parts, object model and background model, as in Fig. 1. To achieve good adaptivity of the proposed method, we update both of them. The object model should give full play to the role of each object exemplar during the tracking process, to handle with the variety of the object. Although training an ELDA detector is very cheap, taking all the exemplars to build the object
2 model is infeasible, especially in a very long-time tracking. We only use the exemplars in a predefined sliding time window in this work. On the other hand, the first frame is very important in tracking, because it includes the precise labels. Thus, we use this exemplar during the whole tracking process, called long-term object model. Similarly, we call the previous one short-term object model. To train a discriminative ELDA detector, vast amounts of negative samples are required. However, we know that, it is difficult and time-consuming to obtain in the procedure of tracking. Thus, we build an initial background model by collecting a sufficient large scale negative set from some natural images with an off-line manner. On the other hand, the background information just around the object instance is critical for tracking in both discrimination and adaptivity. Accordingly, we also update background model by an online manner besides off-line one. To sum up, we present a novel visual tracking framework called ELDA, which is quite discriminative due to exemplar-based learner training by a single object instance and massive negatives, and is quite adaptivity due to online updating both object and background models, as shown in Fig. 1. We apply this algorithm to visual tracking on several public video sequences and find the results quite promising. 2. RELATED WORK Prior approaches to object tracking can be roughly divided into two broad categories for build tracking model, namely, generative and discriminative. We first point the readers to a survey work [14] and a recent benchmark work [1]. Our method is a discriminative tracking model, we therefore present some other previous work on this topic [15, 16, 17, 18, 19, 20, 21]. As shown in these works, most discriminative tracking methods are based on haar-like feature representation and online boosting classifier. However, in object detection, the most popular framework is based on HOG feature [22] and linear SVM or LDA. Furthermore, Struck [6], as one of the most comparative tracker, shows the advantages of SVM classifier in tracking. Motivated by these works, we introduce this detection framework into tracking problem. However, the most difference of our method with the state-of-the-art tracking-by-detection methods is that the detectors in our method are trained by an exemplar-based classifiers, rather than category-based classifiers. Exemplar-SVM detection methods have recently become particularly popular, due to its discrimination ability. Exemplar-based SVM, first introduced in [12], shows good performance by learning an object model from each single object exemplar. However, training an exemplar-svm, by mining for hard negative exemplars, is quite expensive. To resolve this problem, Ref. [13] applies Linear Discriminant Analysis (LDA) technique to speed up. This framework has been widely used in many computer vision applications, i.e., object detection [12, 23], image retrieval [24], mid-level representation discovery for scene classification [25], and action classification [26], etc. Note that, HOG and exemplar-svm (or LDA) framework makes effectiveness of these methods. In view of this, we extend exemplar-based LDA method to online tracking case, by updating both object and background models. 3. ELDA TRACKING METHOD In this section, we introduce the ELDA tracking algorithm, and focus on the process of building ELDA detector, and updating both object model and background model. Fig. 1 is an overview of the proposed approach ELDA detector First we present the typical tracking-by-detection algorithms, which train a detector to distinguish a target object from its local background. Specifically, given a bounding box position c k (initial position or tracked result position) in frame k, a tracker first labels the samples in a predefined training area R t, with the size of radius r, to y = 1 and y = 1 for positive and negative samples respectively; then trains a classifier using the feature representations of the samples X and corresponding labels y; final tracking result is combined by classifying the samples in detection area R d in framek +1. In ELDA tracking algorithm, we only take the sample exactly at position c k as positive sample, rather than the samples in a very close area around c k as in typical tracking-by-detection method. The representation of the positive sample in frame k is denoted as X p k. Then we train an LDA classifier for X p k, using the covariance matrix Σ k and meansµ n k of a negative dataset, which will be introduced in Sec The final ELDA classifier can be written as: H k (X) = sign(ω T k X +b k ) (1) whereω 0 is the threshold, the weights can be calculate by: 3.2. Object Model ω k = Σ 1 (X p k µn k ) (2) We build object model for each positive exemplar, thus, the key is how to choose the positive samples. The first frame with the precise labels is critical in tracking. Thus, we use the object exemplar in the first frame during the whole tracking process, called long-term object model, denoted as H 1 (X). On the other hand, to improve the adaptivity to the variety of object appearance, we would better build object model by applying as many as possible ELDA detectors in theory. However, it s not a good solution in practical
3 application, especially for long-time tracking. In this paper, we simply set a time window TM to choose positives. Only the samples in past TM frames from frame k are used to build object model, namely, X p i, i [ l k ], l = max(2,k TM + 1), and we call it short-term object model. The weights of the ELDA detectors H k (X) are determined by a semi-supervised way using the long-term detector H 1 (X) as the prior, then set the weight λ k to H k (X) as follows: λ k = H 1(X p k ) H 1 (X p 1 ) (3) Accordingly, the object model can be defined as: M O k (X) = λ 1 H 1 (X)+ i 3.3. Background Model λ i H i (X) (4) In exemplar-based framework, the background model Mk B can be denoted as (Σ k,µ n k ) according to Eq. 1 and Eq. 2. In the tracking case, the negative samples in a ring area centered at the object position are critical, where we sample online negatives as most of other tracking-by-detection approaches [7, 4]. On the other hand, the huge number of negatives are the guarantee of discrimination ability of ELDA. However, it is difficult and time-consuming to obtain lots of negatives in the procedure of tracking. Therefore, we utilize a strategy to build a background model with large scale negatives, collecting by both off-line and online manner. To build the off-line model, we first collect massive amounts of negative samples from some natural images, and then calculate the background model (Σ 0,µ 0 ) as initial model M0 B = (Σ 0,µ 0 ), X 0 is the representations of all negative samples. Online background model is used to improve the adaptivity by some negative samples quite relevant to the tracking task, that is in the ring area mentioned above. In framek, we calculate online modelmk Bon using the negative samples Xk n. The final background model in frame k is incrementally calculated using Mk 1 B and MBon k according to definition of covariance matrix and means. 4. EXPERIMENTAL RESULTS 4.1. Experimental setup In this section, we evaluate our ELDA tracker on ten public available benchmark video sequences used in previous works [4, 6, 1], namely, david indoor (david), sylvester, singer2, coke can (coke), girl, david outdoor (david3), suv, liquor, woman, and tiger1. These videos are very difficult to track, because of various challenges, such as, occlusion of objects, illumination variation, appearance change of objects, rotation and scale change of objects, clutter scenes, presence of similar objects, etc. Some samples corresponding to these challenges can be seen in Fig. 2, and more details are introduced in [1]. All the settings of videos are same as in [1], e.g., tiger1 starts from frame 6. In our experiments, ELDA tracker is compared with six state-of-the-art tracking-by-detection algorithms, the fragment tracker (Frag) [27], the online boosting tracker (OAB) [7], the visual tracking decomposition algorithm (VTD) [17], the multiple instance learning tracker (MIL) [4], the incremental visual tracking method (IVT) [28], and Struck [6] Implementation details For the representation, we use HOG feature ( 8 8 cells with 9 orientations ) in this work. Thus, the resulting feature is = 2304 dimensions. To build short-term object model, we set the size of time window T M = 500f rames, which is determined experimentally. To build off-line background model, we collected more than 1000, 000 patches (64 64 pixels) by randomly sampling on the 5096 images of PASCAL VOC 2008 dataset [29]. Then HOG feature is extracted to build initial background model M0 B ; and the online negatives are sampled in the ring area with5 < d 30. The detect arear d is also set to Quantitative Comparison Two common evaluation criteria are used for quantitative comparison, namely, center location error (CLE) and success rate (SR). First we define these two criteria briefly. For each frame, the result is denoted as tracked bounding boxb T and center locationc T, which of ground truth isb G and C G respectively. CLE is defined as the average Euclidean distance (in pixels) between C T and C G. SR is defined as the rate of successful frames in total frames. A tracked result is considered to be successful if the overlap is larger than 0.5. Table 1 and Table 2 report the comparison results of ELDA and other six state-of-the-art trackers in terms of average center location error and success rate. It can be seen that, ELDA tracker outperforms other trackers on 5 out of 10 videos, and obtains 8 best or second best scores out of 10 videos in terms of both average center location error and success rate. Most exiting, ELDA tracker, over all, performs well against other six state-of-the-art algorithms. Note that only one average center location error is bigger than 20 ratio area(bt BG) area(b T BG) pixels in our results, which demonstrate the proposed method works robustly. To highlight the superior performance of the ELDA tracker, we show some images with comparison tracked bounding box in Fig. 2 under lots of special challenges, e.g., heavy occlusion, illumination variations, appearance changes, rotation and scale changes, background cluttering,

 singer2.")
 coke.")

 suv.")

















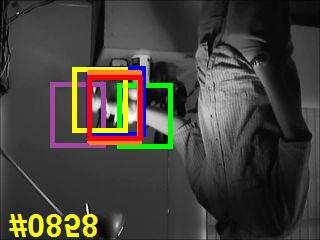









4 (a) david. Scale changes, illumination variations and out-of-plane rotations (b) sylvester. In-plane and out-of-plane rotations (c) singer2. Background cluttering, illumination variations and viewpoint changes (d) coke. Occlusions and out-of-plane rotations (e) girl. In-plane and out-of-plane rotations, scale changes and occlusions (f) david3. Occlusions and out-of-plane rotations (g) suv. Occlusions and viewpoint changes (h) liquor. Occlusions, presence of similar objects and out-of-plane rotations (i) woman. Occlusions, viewpoint changes, and scale changes (j) tiger1. Occlusions, background cluttering, and out-of-plane rotations Fig. 2. Tracked bounding box results comparisons of 7 trackers in 10 videos under some special challenges. Table 1. Average center location error (in pixels) comparison of the 7 trackers on 10 videos. Bold and underlined values indicates best and second best performance. Sequence david sylvester singer2 coke girl david3 suv liquor woman tiger1 MEAN Frag OAB VTD MIL IVT Struck ELDA presence of similar objects occur. To present the tracking results frame by frame, we also give the corresponding tracking error of 7 trackers on 10 video sequences in Fig. 3. It shows the good performance of ELDA tracker in both accuracy and adaptivity. 5. CONCLUSIONS AND FUTURE WORK The task in tracking is to search for a specific object instance, rather than an object category as in detection. In view of this, we proposed a new tracking framework based on exemplar detector rather than category detector. We build Table 2. Success rate comparison of the 7 trackers on 10 videos. Bold and underlined values indicates best and second best performance. Sequence david sylvester singer2 coke girl david3 suv liquor woman tiger1 MEAN Frag OAB VTD MIL IVT Struck ELDA ELDA tracker by both updating object and background models. Promising results on challenging video sequences demonstrate that our method outperforms the state-of-the-art tracking algorithms. We are considering the following for the future work. First, in our current tracker, updating strategy of object model with a predefined time widow is very simple. To further improve the adaptivity, we are looking for a more effective updating method. Second, due to the successful of part-based model in object detection [30], we will study part-based tracking approach, to deal with some challenges, e.g., the occlusion, deformation.

![61271328, and the Fundamental Research Funds for the Central Universities No. HUST2013TS132. 6. REFERENCES [1] Y. Wu, J. Lim, and M.-H.](/docs-images/88/116262160/images/5-1.jpg "Yang, Online object tracking: A benchmark, in CVPR, 2013. [2] S. Avidan, Support vector tracking, in CVPR, 2001. [3] S.")
![Avidan, Ensemble tracking, in CVPR, 2005. [4] B. Babenko, M.-H. Yang, and S.](/docs-images/88/116262160/images/5-2.jpg "Belongie, Viusal tracking with online multiple instance learning, in CVPR, 2009. [5] R.T. Collins, Y. Liu, and M.")
![Leordeanu, Online selection of discriminative tracking features, IEEE T. PAMI, vol. 27, no. 10, pp. 1631 1643, 2005. [6] S. Hare, A. Saffari, and P.](/docs-images/88/116262160/images/5-3.jpg "H. S Torr, Struck: Structured output tracking with kernels, in ICCV, 2011. [7] H. Grabner, M. Grabner, and H.")
![Bischof, Real-time tracking via on-line boosting, in BMVC, 2006. [8] H. Grabner, C. Leistner, and H.](/docs-images/88/116262160/images/5-4.jpg "Bischof, Semisupervised on-line boosting for robust tracking, ECCV, 2008. [9] B. Zeisl, C. Leistner, A. Saffari, and H.")
![Bischof, Online semi-supervised multiple-instance boosting, in CVPR, 2010. [10] C. Gao, N. Sang, and R.](/docs-images/88/116262160/images/5-5.jpg "Huang, Online transfer boosting for object tracking, in ICPR, 2012. [11] S. Stalder, H. Grabner, and L.")

![Malik, and D. Ramanan, Discriminative decorrelation for clustering and classification, in ECCV, 2012. [14] A. Yilmaz, O. Javed, and M.](/docs-images/88/116262160/images/5-7.jpg "Shah, Object tracking: A survey, Acm Computing Surveys, vol. 38, no. 4, 2006. [15] Y. Wu and J. Fan, Contextual flow, in CVPR, 2009. [16] Z.")
![Kalal, J. Matas, and K. Mikolajczyk, P-N learning: Bootstrapping binary classifiers by structural constraints, in CVPR, 2010. [17] J. Kwon and K. M. Lee, Visual tracking decomposition, in CVPR, 2010.](/docs-images/88/116262160/images/5-9.jpg "[18] J. Santner, C. Leistner, A. Saffari, T. Pock, and H. Bischof, PROST: Parallel robust online simple tracking, in CVPR, 2010, pp. 723 730.")
5 Fig. 3. Tracking error (in pixels) of 7 trackers on 10 video sequences. The figure is best viewed in color. Acknowledgments This work is supported by the Project of the National Natural Science Foundation of China No , and the Fundamental Research Funds for the Central Universities No. HUST2013TS REFERENCES [1] Y. Wu, J. Lim, and M.-H. Yang, Online object tracking: A benchmark, in CVPR, [2] S. Avidan, Support vector tracking, in CVPR, [3] S. Avidan, Ensemble tracking, in CVPR, [4] B. Babenko, M.-H. Yang, and S. Belongie, Viusal tracking with online multiple instance learning, in CVPR, [5] R.T. Collins, Y. Liu, and M. Leordeanu, Online selection of discriminative tracking features, IEEE T. PAMI, vol. 27, no. 10, pp , [6] S. Hare, A. Saffari, and P. H. S Torr, Struck: Structured output tracking with kernels, in ICCV, [7] H. Grabner, M. Grabner, and H. Bischof, Real-time tracking via on-line boosting, in BMVC, [8] H. Grabner, C. Leistner, and H. Bischof, Semisupervised on-line boosting for robust tracking, ECCV, [9] B. Zeisl, C. Leistner, A. Saffari, and H. Bischof, Online semi-supervised multiple-instance boosting, in CVPR, [10] C. Gao, N. Sang, and R. Huang, Online transfer boosting for object tracking, in ICPR, [11] S. Stalder, H. Grabner, and L. Van Gool, Beyond semisupervised tracking: Tracking should be as simple as detection, but not simpler than recognition, in ICCV Workshops, [12] T. Malisiewicz, A. Gupta, and A. A. Efros, Ensemble of exemplar-svms for object detection and beyond, in ICCV, [13] B. Hariharan, J. Malik, and D. Ramanan, Discriminative decorrelation for clustering and classification, in ECCV, [14] A. Yilmaz, O. Javed, and M. Shah, Object tracking: A survey, Acm Computing Surveys, vol. 38, no. 4, [15] Y. Wu and J. Fan, Contextual flow, in CVPR, [16] Z. Kalal, J. Matas, and K. Mikolajczyk, P-N learning: Bootstrapping binary classifiers by structural constraints, in CVPR, [17] J. Kwon and K. M. Lee, Visual tracking decomposition, in CVPR, [18] J. Santner, C. Leistner, A. Saffari, T. Pock, and H. Bischof, PROST: Parallel robust online simple tracking, in CVPR, 2010, pp [19] T. B. Dinh, N. Vo, and G. Medioni, Context tracker: Exploring supporters and distracters in unconstrained environments, in CVPR, [20] J. F. Henriques, R. Caseiro, P. Martins, and J. Batista, Exploiting the circulant structure of tracking-bydetection with kernels, in Computer Vision ECCV [21] K. Zhang, L. Zhang, and M.-H. Yang, Real-time compressive tracking, in ECCV
6 [22] Navneet Dalal and Bill Triggs, Histograms of oriented gradients for human detection, in IEEE Conference on Computer Vision and Pattern Recognition, 2005, vol. 1, pp [23] G. Shakhnarovich S. Maji, Part discovery from partial correspondence, in CVPR, [24] T. Malisiewicz, A. Shrivastava, A. Gupta, and A. A. Efros, Exemplar-svms for visual ob ject detection, label transfer and image retrieval., in ICML, [25] M. Juneja, A. Vedaldi, C.V. Jawahar, and A. Zisserman, Blocks that shout: Distinctive parts for scene classification, in CVPR, [26] C. Doersch, A. Gupta, and A. A. Efros, Midlevel visual element discovery as discriminative mode seeking, in NIPS, [27] A. Adam, E. Rivlin, and I. Shimshoni, Robust fragments-based tracking using the integral histogram, in CVPR, [28] D. Ross, J. Lim, R.-S. Lin, and M.-H. Yang, Incremental visual tracking,. [29] M. Everingham, L. Van Gool, C.K.I. Williams, J. Winn, and A. Zisserman, The PASCAL Visual Object Classes Challenge 2008 (VOC2008) Results, VOC/voc2008/workshop/index.html. [30] P. F. Felzenszwalb, R. B. Girshick, D. McAllester, and D. Ramanan, Object detection with discriminatively trained part based models, IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 32, no. 9, pp , 2010.
Part-based Visual Tracking with Online Latent Structural Learning: Supplementary Material
 Part-based Visual Tracking with Online Latent Structural Learning: Supplementary Material Rui Yao, Qinfeng Shi 2, Chunhua Shen 2, Yanning Zhang, Anton van den Hengel 2 School of Computer Science, Northwestern
Part-based Visual Tracking with Online Latent Structural Learning: Supplementary Material Rui Yao, Qinfeng Shi 2, Chunhua Shen 2, Yanning Zhang, Anton van den Hengel 2 School of Computer Science, Northwestern
Struck: Structured Output Tracking with Kernels. Presented by Mike Liu, Yuhang Ming, and Jing Wang May 24, 2017
 Struck: Structured Output Tracking with Kernels Presented by Mike Liu, Yuhang Ming, and Jing Wang May 24, 2017 Motivations Problem: Tracking Input: Target Output: Locations over time http://vision.ucsd.edu/~bbabenko/images/fast.gif
Struck: Structured Output Tracking with Kernels Presented by Mike Liu, Yuhang Ming, and Jing Wang May 24, 2017 Motivations Problem: Tracking Input: Target Output: Locations over time http://vision.ucsd.edu/~bbabenko/images/fast.gif
Tracking. Hao Guan( 管皓 ) School of Computer Science Fudan University
 School of Computer Science Fudan University") Tracking Hao Guan( 管皓 ) School of Computer Science Fudan University 2014-09-29 Multimedia Video Audio Use your eyes Video Tracking Use your ears Audio Tracking Tracking Video Tracking Definition Given
Tracking Hao Guan( 管皓 ) School of Computer Science Fudan University 2014-09-29 Multimedia Video Audio Use your eyes Video Tracking Use your ears Audio Tracking Tracking Video Tracking Definition Given
Object Tracking using HOG and SVM
 Object Tracking using HOG and SVM Siji Joseph #1, Arun Pradeep #2 Electronics and Communication Engineering Axis College of Engineering and Technology, Ambanoly, Thrissur, India Abstract Object detection
Object Tracking using HOG and SVM Siji Joseph #1, Arun Pradeep #2 Electronics and Communication Engineering Axis College of Engineering and Technology, Ambanoly, Thrissur, India Abstract Object detection
Structural Sparse Tracking
 Structural Sparse Tracking Tianzhu Zhang 1,2 Si Liu 3 Changsheng Xu 2,4 Shuicheng Yan 5 Bernard Ghanem 1,6 Narendra Ahuja 1,7 Ming-Hsuan Yang 8 1 Advanced Digital Sciences Center 2 Institute of Automation,
Structural Sparse Tracking Tianzhu Zhang 1,2 Si Liu 3 Changsheng Xu 2,4 Shuicheng Yan 5 Bernard Ghanem 1,6 Narendra Ahuja 1,7 Ming-Hsuan Yang 8 1 Advanced Digital Sciences Center 2 Institute of Automation,
Multiple-Person Tracking by Detection
 http://excel.fit.vutbr.cz Multiple-Person Tracking by Detection Jakub Vojvoda* Abstract Detection and tracking of multiple person is challenging problem mainly due to complexity of scene and large intra-class
http://excel.fit.vutbr.cz Multiple-Person Tracking by Detection Jakub Vojvoda* Abstract Detection and tracking of multiple person is challenging problem mainly due to complexity of scene and large intra-class
Keywords:- Object tracking, multiple instance learning, supervised learning, online boosting, ODFS tracker, classifier. IJSER
 International Journal of Scientific & Engineering Research, Volume 5, Issue 2, February-2014 37 Object Tracking via a Robust Feature Selection approach Prof. Mali M.D. manishamali2008@gmail.com Guide NBNSCOE
International Journal of Scientific & Engineering Research, Volume 5, Issue 2, February-2014 37 Object Tracking via a Robust Feature Selection approach Prof. Mali M.D. manishamali2008@gmail.com Guide NBNSCOE
Online Tracking Parameter Adaptation based on Evaluation
 2013 10th IEEE International Conference on Advanced Video and Signal Based Surveillance Online Tracking Parameter Adaptation based on Evaluation Duc Phu Chau Julien Badie François Brémond Monique Thonnat
2013 10th IEEE International Conference on Advanced Video and Signal Based Surveillance Online Tracking Parameter Adaptation based on Evaluation Duc Phu Chau Julien Badie François Brémond Monique Thonnat
Co-training Framework of Generative and Discriminative Trackers with Partial Occlusion Handling
 Co-training Framework of Generative and Discriminative Trackers with Partial Occlusion Handling Thang Ba Dinh Gérard Medioni Institute of Robotics and Intelligent Systems University of Southern, Los Angeles,
Co-training Framework of Generative and Discriminative Trackers with Partial Occlusion Handling Thang Ba Dinh Gérard Medioni Institute of Robotics and Intelligent Systems University of Southern, Los Angeles,
Efficient Visual Object Tracking with Online Nearest Neighbor Classifier
 Efficient Visual Object Tracking with Online Nearest Neighbor Classifier Steve Gu and Ying Zheng and Carlo Tomasi Department of Computer Science, Duke University Abstract. A tracking-by-detection framework
Efficient Visual Object Tracking with Online Nearest Neighbor Classifier Steve Gu and Ying Zheng and Carlo Tomasi Department of Computer Science, Duke University Abstract. A tracking-by-detection framework
Deformable Part Models
 CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
Object Category Detection: Sliding Windows
 04/10/12 Object Category Detection: Sliding Windows Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical
04/10/12 Object Category Detection: Sliding Windows Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical
 https://en.wikipedia.org/wiki/the_dress Recap: Viola-Jones sliding window detector Fast detection through two mechanisms Quickly eliminate unlikely windows Use features that are fast to compute Viola
https://en.wikipedia.org/wiki/the_dress Recap: Viola-Jones sliding window detector Fast detection through two mechanisms Quickly eliminate unlikely windows Use features that are fast to compute Viola
Online Object Tracking with Proposal Selection. Yang Hua Karteek Alahari Cordelia Schmid Inria Grenoble Rhône-Alpes, France
 Online Object Tracking with Proposal Selection Yang Hua Karteek Alahari Cordelia Schmid Inria Grenoble Rhône-Alpes, France Outline 2 Background Our approach Experimental results Summary Background 3 Tracking-by-detection
Online Object Tracking with Proposal Selection Yang Hua Karteek Alahari Cordelia Schmid Inria Grenoble Rhône-Alpes, France Outline 2 Background Our approach Experimental results Summary Background 3 Tracking-by-detection
Visual Tracking with Online Multiple Instance Learning
 Visual Tracking with Online Multiple Instance Learning Boris Babenko University of California, San Diego bbabenko@cs.ucsd.edu Ming-Hsuan Yang University of California, Merced mhyang@ucmerced.edu Serge
Visual Tracking with Online Multiple Instance Learning Boris Babenko University of California, San Diego bbabenko@cs.ucsd.edu Ming-Hsuan Yang University of California, Merced mhyang@ucmerced.edu Serge
Online Multiple Support Instance Tracking
 Online Multiple Support Instance Tracking Qiu-Hong Zhou Huchuan Lu Ming-Hsuan Yang School of Electronic and Information Engineering Electrical Engineering and Computer Science Dalian University of Technology
Online Multiple Support Instance Tracking Qiu-Hong Zhou Huchuan Lu Ming-Hsuan Yang School of Electronic and Information Engineering Electrical Engineering and Computer Science Dalian University of Technology
Efficient Detector Adaptation for Object Detection in a Video
 2013 IEEE Conference on Computer Vision and Pattern Recognition Efficient Detector Adaptation for Object Detection in a Video Pramod Sharma and Ram Nevatia Institute for Robotics and Intelligent Systems,
2013 IEEE Conference on Computer Vision and Pattern Recognition Efficient Detector Adaptation for Object Detection in a Video Pramod Sharma and Ram Nevatia Institute for Robotics and Intelligent Systems,
Automatic Parameter Adaptation for Multi-Object Tracking
 Automatic Parameter Adaptation for Multi-Object Tracking Duc Phu CHAU, Monique THONNAT, and François BREMOND {Duc-Phu.Chau, Monique.Thonnat, Francois.Bremond}@inria.fr STARS team, INRIA Sophia Antipolis,
Automatic Parameter Adaptation for Multi-Object Tracking Duc Phu CHAU, Monique THONNAT, and François BREMOND {Duc-Phu.Chau, Monique.Thonnat, Francois.Bremond}@inria.fr STARS team, INRIA Sophia Antipolis,
Find that! Visual Object Detection Primer
 Find that! Visual Object Detection Primer SkTech/MIT Innovation Workshop August 16, 2012 Dr. Tomasz Malisiewicz tomasz@csail.mit.edu Find that! Your Goals...imagine one such system that drives information
Find that! Visual Object Detection Primer SkTech/MIT Innovation Workshop August 16, 2012 Dr. Tomasz Malisiewicz tomasz@csail.mit.edu Find that! Your Goals...imagine one such system that drives information
Improving an Object Detector and Extracting Regions using Superpixels
 Improving an Object Detector and Extracting Regions using Superpixels Guang Shu, Afshin Dehghan, Mubarak Shah Computer Vision Lab, University of Central Florida {gshu, adehghan, shah}@eecs.ucf.edu Abstract
Improving an Object Detector and Extracting Regions using Superpixels Guang Shu, Afshin Dehghan, Mubarak Shah Computer Vision Lab, University of Central Florida {gshu, adehghan, shah}@eecs.ucf.edu Abstract
Fast Visual Tracking via Dense Spatio-Temporal Context Learning
 Fast Visual Tracking via Dense Spatio-Temporal Context Learning Kaihua Zhang 1, Lei Zhang 2, Qingshan Liu 1, David Zhang 2, and Ming-Hsuan Yang 3 1 S-mart Group, Nanjing University of Information Science
Fast Visual Tracking via Dense Spatio-Temporal Context Learning Kaihua Zhang 1, Lei Zhang 2, Qingshan Liu 1, David Zhang 2, and Ming-Hsuan Yang 3 1 S-mart Group, Nanjing University of Information Science
A Superior Tracking Approach: Building a strong Tracker through Fusion
 A Superior Tracking Approach: Building a strong Tracker through Fusion Christian Bailer 1, Alain Pagani 1, and Didier Stricker 1,2 1 German Research Center for Artificial Intelligence, Kaiserslautern,
A Superior Tracking Approach: Building a strong Tracker through Fusion Christian Bailer 1, Alain Pagani 1, and Didier Stricker 1,2 1 German Research Center for Artificial Intelligence, Kaiserslautern,
2 Cascade detection and tracking
 3rd International Conference on Multimedia Technology(ICMT 213) A fast on-line boosting tracking algorithm based on cascade filter of multi-features HU Song, SUN Shui-Fa* 1, MA Xian-Bing, QIN Yin-Shi,
3rd International Conference on Multimedia Technology(ICMT 213) A fast on-line boosting tracking algorithm based on cascade filter of multi-features HU Song, SUN Shui-Fa* 1, MA Xian-Bing, QIN Yin-Shi,
Pixel-Pair Features Selection for Vehicle Tracking
 2013 Second IAPR Asian Conference on Pattern Recognition Pixel-Pair Features Selection for Vehicle Tracking Zhibin Zhang, Xuezhen Li, Takio Kurita Graduate School of Engineering Hiroshima University Higashihiroshima,
2013 Second IAPR Asian Conference on Pattern Recognition Pixel-Pair Features Selection for Vehicle Tracking Zhibin Zhang, Xuezhen Li, Takio Kurita Graduate School of Engineering Hiroshima University Higashihiroshima,
Category-level localization
 Category-level localization Cordelia Schmid Recognition Classification Object present/absent in an image Often presence of a significant amount of background clutter Localization / Detection Localize object
Category-level localization Cordelia Schmid Recognition Classification Object present/absent in an image Often presence of a significant amount of background clutter Localization / Detection Localize object
Visual Tracking Using Pertinent Patch Selection and Masking
 Visual Tracking Using Pertinent Patch Selection and Masking Dae-Youn Lee, Jae-Young Sim, and Chang-Su Kim School of Electrical Engineering, Korea University, Seoul, Korea School of Electrical and Computer
Visual Tracking Using Pertinent Patch Selection and Masking Dae-Youn Lee, Jae-Young Sim, and Chang-Su Kim School of Electrical Engineering, Korea University, Seoul, Korea School of Electrical and Computer
Robustifying the Flock of Trackers
 1-Feb-11 Matas, Vojir : Robustifying the Flock of Trackers 1 Robustifying the Flock of Trackers Tomáš Vojíř and Jiří Matas {matas, vojirtom}@cmp.felk.cvut.cz Department of Cybernetics, Faculty of Electrical
1-Feb-11 Matas, Vojir : Robustifying the Flock of Trackers 1 Robustifying the Flock of Trackers Tomáš Vojíř and Jiří Matas {matas, vojirtom}@cmp.felk.cvut.cz Department of Cybernetics, Faculty of Electrical
Multi-Object Tracking Based on Tracking-Learning-Detection Framework
 Multi-Object Tracking Based on Tracking-Learning-Detection Framework Songlin Piao, Karsten Berns Robotics Research Lab University of Kaiserslautern Abstract. This paper shows the framework of robust long-term
Multi-Object Tracking Based on Tracking-Learning-Detection Framework Songlin Piao, Karsten Berns Robotics Research Lab University of Kaiserslautern Abstract. This paper shows the framework of robust long-term
A Novel Extreme Point Selection Algorithm in SIFT
 A Novel Extreme Point Selection Algorithm in SIFT Ding Zuchun School of Electronic and Communication, South China University of Technolog Guangzhou, China zucding@gmail.com Abstract. This paper proposes
A Novel Extreme Point Selection Algorithm in SIFT Ding Zuchun School of Electronic and Communication, South China University of Technolog Guangzhou, China zucding@gmail.com Abstract. This paper proposes
Object Tracking using Superpixel Confidence Map in Centroid Shifting Method
 Indian Journal of Science and Technology, Vol 9(35), DOI: 10.17485/ijst/2016/v9i35/101783, September 2016 ISSN (Print) : 0974-6846 ISSN (Online) : 0974-5645 Object Tracking using Superpixel Confidence
Indian Journal of Science and Technology, Vol 9(35), DOI: 10.17485/ijst/2016/v9i35/101783, September 2016 ISSN (Print) : 0974-6846 ISSN (Online) : 0974-5645 Object Tracking using Superpixel Confidence
Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks
 Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks Si Chen The George Washington University sichen@gwmail.gwu.edu Meera Hahn Emory University mhahn7@emory.edu Mentor: Afshin
Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks Si Chen The George Washington University sichen@gwmail.gwu.edu Meera Hahn Emory University mhahn7@emory.edu Mentor: Afshin
Online Object Tracking: A Benchmark
 Online Object Tracking: A Benchmark Yi Wu, Ming-Hsuan Yang University of California at Merced {ywu29,mhyang}@ucmerced.edu Jongwoo Lim Hanyang University jlim@hanyang.ac.kr Abstract Object tracking is one
Online Object Tracking: A Benchmark Yi Wu, Ming-Hsuan Yang University of California at Merced {ywu29,mhyang}@ucmerced.edu Jongwoo Lim Hanyang University jlim@hanyang.ac.kr Abstract Object tracking is one
Robust Visual Tracking with Deep Convolutional Neural Network based Object Proposals on PETS
 Robust Visual Tracking with Deep Convolutional Neural Network based Object Proposals on PETS Gao Zhu Fatih Porikli,2,3 Hongdong Li,3 Australian National University, NICTA 2 ARC Centre of Excellence for
Robust Visual Tracking with Deep Convolutional Neural Network based Object Proposals on PETS Gao Zhu Fatih Porikli,2,3 Hongdong Li,3 Australian National University, NICTA 2 ARC Centre of Excellence for
Co-training Framework of Generative and Discriminative Trackers with Partial Occlusion Handling
 Co-training Framework of Generative and Discriminative Trackers with Partial Occlusion Handling Thang Ba Dinh Gérard Medioni Institute of Robotics and Intelligent Systems University of Southern, Los Angeles,
Co-training Framework of Generative and Discriminative Trackers with Partial Occlusion Handling Thang Ba Dinh Gérard Medioni Institute of Robotics and Intelligent Systems University of Southern, Los Angeles,
Tri-modal Human Body Segmentation
 Tri-modal Human Body Segmentation Master of Science Thesis Cristina Palmero Cantariño Advisor: Sergio Escalera Guerrero February 6, 2014 Outline 1 Introduction 2 Tri-modal dataset 3 Proposed baseline 4
Tri-modal Human Body Segmentation Master of Science Thesis Cristina Palmero Cantariño Advisor: Sergio Escalera Guerrero February 6, 2014 Outline 1 Introduction 2 Tri-modal dataset 3 Proposed baseline 4
Object Detection Design challenges
 Object Detection Design challenges How to efficiently search for likely objects Even simple models require searching hundreds of thousands of positions and scales Feature design and scoring How should
Object Detection Design challenges How to efficiently search for likely objects Even simple models require searching hundreds of thousands of positions and scales Feature design and scoring How should
Real Time Face Tracking By Using Naïve Bayes Classifier
 Real Time Face Tracking By Using Naïve Bayes Classifier Krishna Priya Arni 1, Satish Ammuloju 2, Jagan Mohan Vithalachari Gollapalli 3, Dinesh Bhogapurapu 4) Shaik Azeez 5 Student, Department of ECE, Lendi
Real Time Face Tracking By Using Naïve Bayes Classifier Krishna Priya Arni 1, Satish Ammuloju 2, Jagan Mohan Vithalachari Gollapalli 3, Dinesh Bhogapurapu 4) Shaik Azeez 5 Student, Department of ECE, Lendi
Real-time Object Tracking via Online Discriminative Feature Selection
 IEEE TRANSACTION ON IMAGE PROCESSING 1 Real-time Object Tracking via Online Discriminative Feature Selection Kaihua Zhang, Lei Zhang, and Ming-Hsuan Yang Abstract Most tracking-by-detection algorithms
IEEE TRANSACTION ON IMAGE PROCESSING 1 Real-time Object Tracking via Online Discriminative Feature Selection Kaihua Zhang, Lei Zhang, and Ming-Hsuan Yang Abstract Most tracking-by-detection algorithms
Object Detection with Partial Occlusion Based on a Deformable Parts-Based Model
 Object Detection with Partial Occlusion Based on a Deformable Parts-Based Model Johnson Hsieh (johnsonhsieh@gmail.com), Alexander Chia (alexchia@stanford.edu) Abstract -- Object occlusion presents a major
Object Detection with Partial Occlusion Based on a Deformable Parts-Based Model Johnson Hsieh (johnsonhsieh@gmail.com), Alexander Chia (alexchia@stanford.edu) Abstract -- Object occlusion presents a major
Category vs. instance recognition
 Category vs. instance recognition Category: Find all the people Find all the buildings Often within a single image Often sliding window Instance: Is this face James? Find this specific famous building
Category vs. instance recognition Category: Find all the people Find all the buildings Often within a single image Often sliding window Instance: Is this face James? Find this specific famous building
Structure Preserving Object Tracking
 Structure Preserving Object Tracking Lu Zhang Laurens van der Maaten Computer Vision Lab, Delft University of Technology Mekelweg 4, 2628 CD Delft, The Netherlands {lu.zhang, l.j.p.vandermaaten}@tudelft.nl
Structure Preserving Object Tracking Lu Zhang Laurens van der Maaten Computer Vision Lab, Delft University of Technology Mekelweg 4, 2628 CD Delft, The Netherlands {lu.zhang, l.j.p.vandermaaten}@tudelft.nl
A Comparative Study of Object Trackers for Infrared Flying Bird Tracking
 A Comparative Study of Object Trackers for Infrared Flying Bird Tracking Ying Huang, Hong Zheng, Haibin Ling 2, Erik Blasch 3, Hao Yang 4 School of Automation Science and Electrical Engineering, Beihang
A Comparative Study of Object Trackers for Infrared Flying Bird Tracking Ying Huang, Hong Zheng, Haibin Ling 2, Erik Blasch 3, Hao Yang 4 School of Automation Science and Electrical Engineering, Beihang
Supervised Nearest Neighbor Searching for Visual Tracking
 Supervised Nearest Neighbor Searching for Visual Tracking Ji Zhang, Jie Sheng, Ankur Teredesai Computer Science and Systems Institute of Technology University of Washington Tacoma Abstract. Supervised
Supervised Nearest Neighbor Searching for Visual Tracking Ji Zhang, Jie Sheng, Ankur Teredesai Computer Science and Systems Institute of Technology University of Washington Tacoma Abstract. Supervised
A Study of Vehicle Detector Generalization on U.S. Highway
 26 IEEE 9th International Conference on Intelligent Transportation Systems (ITSC) Windsor Oceanico Hotel, Rio de Janeiro, Brazil, November -4, 26 A Study of Vehicle Generalization on U.S. Highway Rakesh
26 IEEE 9th International Conference on Intelligent Transportation Systems (ITSC) Windsor Oceanico Hotel, Rio de Janeiro, Brazil, November -4, 26 A Study of Vehicle Generalization on U.S. Highway Rakesh
PROST: Parallel Robust Online Simple Tracking
 PROST: Parallel Robust Online Simple Tracking Jakob Santner Christian Leistner Amir Saffari Thomas Pock Horst Bischof Institute for Computer Graphics and Vision, Graz University of Technology {santner,leistner,saffari,pock,bischof}@icg.tugraz.at
PROST: Parallel Robust Online Simple Tracking Jakob Santner Christian Leistner Amir Saffari Thomas Pock Horst Bischof Institute for Computer Graphics and Vision, Graz University of Technology {santner,leistner,saffari,pock,bischof}@icg.tugraz.at
Online Discriminative Tracking with Active Example Selection
 1 Online Discriminative Tracking with Active Example Selection Min Yang, Yuwei Wu, Mingtao Pei, Bo Ma and Yunde Jia, Member, IEEE Abstract Most existing discriminative tracking algorithms use a sampling-and-labeling
1 Online Discriminative Tracking with Active Example Selection Min Yang, Yuwei Wu, Mingtao Pei, Bo Ma and Yunde Jia, Member, IEEE Abstract Most existing discriminative tracking algorithms use a sampling-and-labeling
Enhanced Laplacian Group Sparse Learning with Lifespan Outlier Rejection for Visual Tracking
 Enhanced Laplacian Group Sparse Learning with Lifespan Outlier Rejection for Visual Tracking Behzad Bozorgtabar 1 and Roland Goecke 1,2 1 Vision & Sensing, HCC Lab, ESTeM University of Canberra 2 IHCC,
Enhanced Laplacian Group Sparse Learning with Lifespan Outlier Rejection for Visual Tracking Behzad Bozorgtabar 1 and Roland Goecke 1,2 1 Vision & Sensing, HCC Lab, ESTeM University of Canberra 2 IHCC,
Robust Tracking with Weighted Online Structured Learning
 Robust Tracking with Weighted Online Structured Learning Rui Yao 1,2, Qinfeng Shi 2, Chunhua Shen 2, Yanning Zhang 1, and Anton van den Hengel 2 1 School of Computer Science, Northwestern Polytechnical
Robust Tracking with Weighted Online Structured Learning Rui Yao 1,2, Qinfeng Shi 2, Chunhua Shen 2, Yanning Zhang 1, and Anton van den Hengel 2 1 School of Computer Science, Northwestern Polytechnical
Context Tracker: Exploring Supporters and Distracters in Unconstrained Environments
 Context Tracker: Exploring Supporters and Distracters in Unconstrained Environments Thang Ba Dinh 1, Nam Vo 2, and Gérard Medioni 1 1 Institute of Robotics and Intelligent Systems University of Southern
Context Tracker: Exploring Supporters and Distracters in Unconstrained Environments Thang Ba Dinh 1, Nam Vo 2, and Gérard Medioni 1 1 Institute of Robotics and Intelligent Systems University of Southern
Online Object Tracking, Learning and Parsing with And-Or Graphs
 Online Object Tracking, Learning and Parsing with And-Or Graphs Yang Lu, Tianfu Wu and Song-Chun Zhu Center for Vision, Cognition, Learning and Art Department of Statistics, University of California, Los
Online Object Tracking, Learning and Parsing with And-Or Graphs Yang Lu, Tianfu Wu and Song-Chun Zhu Center for Vision, Cognition, Learning and Art Department of Statistics, University of California, Los
Development in Object Detection. Junyuan Lin May 4th
 Development in Object Detection Junyuan Lin May 4th Line of Research [1] N. Dalal and B. Triggs. Histograms of oriented gradients for human detection, CVPR 2005. HOG Feature template [2] P. Felzenszwalb,
Development in Object Detection Junyuan Lin May 4th Line of Research [1] N. Dalal and B. Triggs. Histograms of oriented gradients for human detection, CVPR 2005. HOG Feature template [2] P. Felzenszwalb,
ROBUST ONLINE FACE TRACKING-BY-DETECTION. {f.comaschi, s.stuijk, a.a.basten,
 ROBUST ONLINE FACE TRACKING-BY-DETECTION Francesco Comaschi 1, Sander Stuijk 1, Twan Basten 1,2, Henk Corporaal 1 1 Eindhoven University of Technology, The Netherlands 2 TNO Embedded Systems Innovation,
ROBUST ONLINE FACE TRACKING-BY-DETECTION Francesco Comaschi 1, Sander Stuijk 1, Twan Basten 1,2, Henk Corporaal 1 1 Eindhoven University of Technology, The Netherlands 2 TNO Embedded Systems Innovation,
Comparison of Infrared and Visible Imagery for Object Tracking: Toward Trackers with Superior IR Performance
 Comparison of Infrared and Visible Imagery for Object Tracking: Toward Trackers with Superior IR Performance Erhan Gundogdu, Huseyin Ozkan, H. Seckin Demir, Hamza Ergezer, Erdem Akagündüz, S. Kubilay Pakin
Comparison of Infrared and Visible Imagery for Object Tracking: Toward Trackers with Superior IR Performance Erhan Gundogdu, Huseyin Ozkan, H. Seckin Demir, Hamza Ergezer, Erdem Akagündüz, S. Kubilay Pakin
Seeing 3D chairs: Exemplar part-based 2D-3D alignment using a large dataset of CAD models
 Seeing 3D chairs: Exemplar part-based 2D-3D alignment using a large dataset of CAD models Mathieu Aubry (INRIA) Daniel Maturana (CMU) Alexei Efros (UC Berkeley) Bryan Russell (Intel) Josef Sivic (INRIA)
Seeing 3D chairs: Exemplar part-based 2D-3D alignment using a large dataset of CAD models Mathieu Aubry (INRIA) Daniel Maturana (CMU) Alexei Efros (UC Berkeley) Bryan Russell (Intel) Josef Sivic (INRIA)
arxiv: v2 [cs.cv] 9 Sep 2016
![arxiv: v2 [cs.cv] 9 Sep 2016](/thumbs/93/113175421.jpg "arxiv: v2 [cs.cv] 9 Sep 2016") arxiv:1608.08171v2 [cs.cv] 9 Sep 2016 Tracking Completion Yao Sui 1, Guanghui Wang 1,4, Yafei Tang 2, Li Zhang 3 1 Dept. of EECS, University of Kansas, Lawrence, KS 66045, USA 2 China Unicom Research Institute,
arxiv:1608.08171v2 [cs.cv] 9 Sep 2016 Tracking Completion Yao Sui 1, Guanghui Wang 1,4, Yafei Tang 2, Li Zhang 3 1 Dept. of EECS, University of Kansas, Lawrence, KS 66045, USA 2 China Unicom Research Institute,
THE goal of object tracking is to estimate the states of
 2356 IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 23, NO. 5, MAY 2014 Robust Object Tracking via Sparse Collaborative Appearance Model Wei Zhong, Huchuan Lu, Senior Member, IEEE, and Ming-Hsuan Yang, Senior
2356 IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 23, NO. 5, MAY 2014 Robust Object Tracking via Sparse Collaborative Appearance Model Wei Zhong, Huchuan Lu, Senior Member, IEEE, and Ming-Hsuan Yang, Senior
Using the Deformable Part Model with Autoencoded Feature Descriptors for Object Detection
 Using the Deformable Part Model with Autoencoded Feature Descriptors for Object Detection Hyunghoon Cho and David Wu December 10, 2010 1 Introduction Given its performance in recent years' PASCAL Visual
Using the Deformable Part Model with Autoencoded Feature Descriptors for Object Detection Hyunghoon Cho and David Wu December 10, 2010 1 Introduction Given its performance in recent years' PASCAL Visual
Object Category Detection. Slides mostly from Derek Hoiem
 Object Category Detection Slides mostly from Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical template matching with sliding window Part-based Models
Object Category Detection Slides mostly from Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical template matching with sliding window Part-based Models
Segmenting Objects in Weakly Labeled Videos
 Segmenting Objects in Weakly Labeled Videos Mrigank Rochan, Shafin Rahman, Neil D.B. Bruce, Yang Wang Department of Computer Science University of Manitoba Winnipeg, Canada {mrochan, shafin12, bruce, ywang}@cs.umanitoba.ca
Segmenting Objects in Weakly Labeled Videos Mrigank Rochan, Shafin Rahman, Neil D.B. Bruce, Yang Wang Department of Computer Science University of Manitoba Winnipeg, Canada {mrochan, shafin12, bruce, ywang}@cs.umanitoba.ca
CS229: Action Recognition in Tennis
 CS229: Action Recognition in Tennis Aman Sikka Stanford University Stanford, CA 94305 Rajbir Kataria Stanford University Stanford, CA 94305 asikka@stanford.edu rkataria@stanford.edu 1. Motivation As active
CS229: Action Recognition in Tennis Aman Sikka Stanford University Stanford, CA 94305 Rajbir Kataria Stanford University Stanford, CA 94305 asikka@stanford.edu rkataria@stanford.edu 1. Motivation As active
Object Detection by 3D Aspectlets and Occlusion Reasoning
 Object Detection by 3D Aspectlets and Occlusion Reasoning Yu Xiang University of Michigan Silvio Savarese Stanford University In the 4th International IEEE Workshop on 3D Representation and Recognition
Object Detection by 3D Aspectlets and Occlusion Reasoning Yu Xiang University of Michigan Silvio Savarese Stanford University In the 4th International IEEE Workshop on 3D Representation and Recognition
Robust Object Tracking with Online Multiple Instance Learning
 Robust Object Tracking with Online Multiple Instance Learning Boris Babenko, Student Member, IEEE, Ming-Hsuan Yang, Senior Member, IEEE and Serge Belongie, Member, IEEE Abstract In this paper we address
Robust Object Tracking with Online Multiple Instance Learning Boris Babenko, Student Member, IEEE, Ming-Hsuan Yang, Senior Member, IEEE and Serge Belongie, Member, IEEE Abstract In this paper we address
Improving Object Tracking by Adapting Detectors
 Improving Object Tracking by Adapting Detectors Lu Zhang Laurens van der Maaten Vision Lab, Delft University of Technology, The Netherlands Email: {lu.zhang, l.j.p.vandermaaten}@tudelft.nl Abstract The
Improving Object Tracking by Adapting Detectors Lu Zhang Laurens van der Maaten Vision Lab, Delft University of Technology, The Netherlands Email: {lu.zhang, l.j.p.vandermaaten}@tudelft.nl Abstract The
THE recent years have witnessed significant advances
 IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 23, NO. 4, APRIL 2014 1639 Robust Superpixel Tracking Fan Yang, Student Member, IEEE, Huchuan Lu, Senior Member, IEEE, and Ming-Hsuan Yang, Senior Member, IEEE
IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 23, NO. 4, APRIL 2014 1639 Robust Superpixel Tracking Fan Yang, Student Member, IEEE, Huchuan Lu, Senior Member, IEEE, and Ming-Hsuan Yang, Senior Member, IEEE
arxiv: v2 [cs.cv] 25 Aug 2014
![arxiv: v2 [cs.cv] 25 Aug 2014](/thumbs/88/116094031.jpg "arxiv: v2 [cs.cv] 25 Aug 2014") ARTOS Adaptive Real-Time Object Detection System Björn Barz Erik Rodner bjoern.barz@uni-jena.de erik.rodner@uni-jena.de arxiv:1407.2721v2 [cs.cv] 25 Aug 2014 Joachim Denzler Computer Vision Group Friedrich
ARTOS Adaptive Real-Time Object Detection System Björn Barz Erik Rodner bjoern.barz@uni-jena.de erik.rodner@uni-jena.de arxiv:1407.2721v2 [cs.cv] 25 Aug 2014 Joachim Denzler Computer Vision Group Friedrich
Modeling 3D viewpoint for part-based object recognition of rigid objects
 Modeling 3D viewpoint for part-based object recognition of rigid objects Joshua Schwartz Department of Computer Science Cornell University jdvs@cs.cornell.edu Abstract Part-based object models based on
Modeling 3D viewpoint for part-based object recognition of rigid objects Joshua Schwartz Department of Computer Science Cornell University jdvs@cs.cornell.edu Abstract Part-based object models based on
Object tracking using a convolutional network and a structured output SVM
 Computational Visual Media DOI 10.1007/s41095-017-0087-3 Vol. 3, No. 4, December 2017, 325 335 Research Article Object tracking using a convolutional network and a structured output SVM Junwei Li 1, Xiaolong
Computational Visual Media DOI 10.1007/s41095-017-0087-3 Vol. 3, No. 4, December 2017, 325 335 Research Article Object tracking using a convolutional network and a structured output SVM Junwei Li 1, Xiaolong
Real-Time Compressive Tracking
 Real-Time Compressive Tracking Kaihua Zhang 1,LeiZhang 1, and Ming-Hsuan Yang 2 1 Depart. of Computing, Hong Kong Polytechnic University 2 Electrical Engineering and Computer Science, University of California
Real-Time Compressive Tracking Kaihua Zhang 1,LeiZhang 1, and Ming-Hsuan Yang 2 1 Depart. of Computing, Hong Kong Polytechnic University 2 Electrical Engineering and Computer Science, University of California
Automatic Adaptation of a Generic Pedestrian Detector to a Specific Traffic Scene
 Automatic Adaptation of a Generic Pedestrian Detector to a Specific Traffic Scene Meng Wang and Xiaogang Wang {mwang,xgwang}@ee.cuhk.edu.hk Department of Electronic Engineering, The Chinese University
Automatic Adaptation of a Generic Pedestrian Detector to a Specific Traffic Scene Meng Wang and Xiaogang Wang {mwang,xgwang}@ee.cuhk.edu.hk Department of Electronic Engineering, The Chinese University
ON-LINE BOOSTING BASED REAL-TIME TRACKING WITH EFFICIENT HOG
 ON-LINE BOOSTING BASED REAL-TIME TRACKING WITH EFFICIENT HOG Shuifa Sun **, Qing Guo *, Fangmin Dong, Bangjun Lei Institute of Intelligent Vision and Image Information, China Three Gorges University, Yichang
ON-LINE BOOSTING BASED REAL-TIME TRACKING WITH EFFICIENT HOG Shuifa Sun **, Qing Guo *, Fangmin Dong, Bangjun Lei Institute of Intelligent Vision and Image Information, China Three Gorges University, Yichang
arxiv: v1 [cs.cv] 10 Jul 2014
![arxiv: v1 [cs.cv] 10 Jul 2014](/thumbs/88/116093932.jpg "arxiv: v1 [cs.cv] 10 Jul 2014") ARTOS Adaptive Real-Time Object Detection System Björn Barz Erik Rodner bjoern.barz@uni-jena.de erik.rodner@uni-jena.de arxiv:1407.2721v1 [cs.cv] 10 Jul 2014 Joachim Denzler Computer Vision Group Friedrich
ARTOS Adaptive Real-Time Object Detection System Björn Barz Erik Rodner bjoern.barz@uni-jena.de erik.rodner@uni-jena.de arxiv:1407.2721v1 [cs.cv] 10 Jul 2014 Joachim Denzler Computer Vision Group Friedrich
OBJECT tracking has been extensively studied in computer
 IEEE TRANSAION ON IMAGE PROCESSING 1 Real-time Object Tracking via Online Discriminative Feature Selection Kaihua Zhang, Lei Zhang, and Ming-Hsuan Yang Abstract Most tracking-by-detection algorithms train
IEEE TRANSAION ON IMAGE PROCESSING 1 Real-time Object Tracking via Online Discriminative Feature Selection Kaihua Zhang, Lei Zhang, and Ming-Hsuan Yang Abstract Most tracking-by-detection algorithms train
Online visual tracking by integrating spatio-temporal cues
 Published in IET Computer Vision Received on 12th September 2013 Revised on 27th March 2014 Accepted on 14th May 2014 ISSN 1751-9632 Online visual tracking by integrating spatio-temporal cues Yang He,
Published in IET Computer Vision Received on 12th September 2013 Revised on 27th March 2014 Accepted on 14th May 2014 ISSN 1751-9632 Online visual tracking by integrating spatio-temporal cues Yang He,
Online Multi-Face Detection and Tracking using Detector Confidence and Structured SVMs
 Online Multi-Face Detection and Tracking using Detector Confidence and Structured SVMs Francesco Comaschi 1, Sander Stuijk 1, Twan Basten 1,2 and Henk Corporaal 1 1 Eindhoven University of Technology,
Online Multi-Face Detection and Tracking using Detector Confidence and Structured SVMs Francesco Comaschi 1, Sander Stuijk 1, Twan Basten 1,2 and Henk Corporaal 1 1 Eindhoven University of Technology,
Multihypothesis Trajectory Analysis for Robust Visual Tracking
 Multihypothesis Trajectory Analysis for Robust Visual Tracking Dae-Youn Lee, Jae-Young Sim, and Chang-Su Kim School of Electrical Engineering, Korea University, Seoul, Korea School of Electrical and Computer
Multihypothesis Trajectory Analysis for Robust Visual Tracking Dae-Youn Lee, Jae-Young Sim, and Chang-Su Kim School of Electrical Engineering, Korea University, Seoul, Korea School of Electrical and Computer
Boosting Object Detection Performance in Crowded Surveillance Videos
 Boosting Object Detection Performance in Crowded Surveillance Videos Rogerio Feris, Ankur Datta, Sharath Pankanti IBM T. J. Watson Research Center, New York Contact: Rogerio Feris (rsferis@us.ibm.com)
Boosting Object Detection Performance in Crowded Surveillance Videos Rogerio Feris, Ankur Datta, Sharath Pankanti IBM T. J. Watson Research Center, New York Contact: Rogerio Feris (rsferis@us.ibm.com)
Real Time Person Detection and Tracking by Mobile Robots using RGB-D Images
 Real Time Person Detection and Tracking by Mobile Robots using RGB-D Images Duc My Vo, Lixing Jiang and Andreas Zell Abstract Detecting and tracking humans are key problems for human-robot interaction.
Real Time Person Detection and Tracking by Mobile Robots using RGB-D Images Duc My Vo, Lixing Jiang and Andreas Zell Abstract Detecting and tracking humans are key problems for human-robot interaction.
A Discriminatively Trained, Multiscale, Deformable Part Model
 A Discriminatively Trained, Multiscale, Deformable Part Model by Pedro Felzenszwalb, David McAllester, and Deva Ramanan CS381V Visual Recognition - Paper Presentation Slide credit: Duan Tran Slide credit:
A Discriminatively Trained, Multiscale, Deformable Part Model by Pedro Felzenszwalb, David McAllester, and Deva Ramanan CS381V Visual Recognition - Paper Presentation Slide credit: Duan Tran Slide credit:
Detection III: Analyzing and Debugging Detection Methods
 CS 1699: Intro to Computer Vision Detection III: Analyzing and Debugging Detection Methods Prof. Adriana Kovashka University of Pittsburgh November 17, 2015 Today Review: Deformable part models How can
CS 1699: Intro to Computer Vision Detection III: Analyzing and Debugging Detection Methods Prof. Adriana Kovashka University of Pittsburgh November 17, 2015 Today Review: Deformable part models How can
Human Detection and Tracking for Video Surveillance: A Cognitive Science Approach
 Human Detection and Tracking for Video Surveillance: A Cognitive Science Approach Vandit Gajjar gajjar.vandit.381@ldce.ac.in Ayesha Gurnani gurnani.ayesha.52@ldce.ac.in Yash Khandhediya khandhediya.yash.364@ldce.ac.in
Human Detection and Tracking for Video Surveillance: A Cognitive Science Approach Vandit Gajjar gajjar.vandit.381@ldce.ac.in Ayesha Gurnani gurnani.ayesha.52@ldce.ac.in Yash Khandhediya khandhediya.yash.364@ldce.ac.in
Lecture 18: Human Motion Recognition
 Lecture 18: Human Motion Recognition Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Introduction Motion classification using template matching Motion classification i using spatio
Lecture 18: Human Motion Recognition Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Introduction Motion classification using template matching Motion classification i using spatio
Recap Image Classification with Bags of Local Features
 Recap Image Classification with Bags of Local Features Bag of Feature models were the state of the art for image classification for a decade BoF may still be the state of the art for instance retrieval
Recap Image Classification with Bags of Local Features Bag of Feature models were the state of the art for image classification for a decade BoF may still be the state of the art for instance retrieval
c 2011 by Pedro Moises Crisostomo Romero. All rights reserved.
 c 2011 by Pedro Moises Crisostomo Romero. All rights reserved. HAND DETECTION ON IMAGES BASED ON DEFORMABLE PART MODELS AND ADDITIONAL FEATURES BY PEDRO MOISES CRISOSTOMO ROMERO THESIS Submitted in partial
c 2011 by Pedro Moises Crisostomo Romero. All rights reserved. HAND DETECTION ON IMAGES BASED ON DEFORMABLE PART MODELS AND ADDITIONAL FEATURES BY PEDRO MOISES CRISOSTOMO ROMERO THESIS Submitted in partial
Combining ROI-base and Superpixel Segmentation for Pedestrian Detection Ji Ma1,2, a, Jingjiao Li1, Zhenni Li1 and Li Ma2
 6th International Conference on Machinery, Materials, Environment, Biotechnology and Computer (MMEBC 2016) Combining ROI-base and Superpixel Segmentation for Pedestrian Detection Ji Ma1,2, a, Jingjiao
6th International Conference on Machinery, Materials, Environment, Biotechnology and Computer (MMEBC 2016) Combining ROI-base and Superpixel Segmentation for Pedestrian Detection Ji Ma1,2, a, Jingjiao
Efficient Multi-Camera Detection, Tracking, and Identification using a Shared Set of Haar-Features
 Efficient Multi-Camera Detection, Tracking, and Identification using a Shared Set of Haar-Features Reyes Rios Cabrera 1, Tinne Tuytelaars 1 and Luc Van Gool 1,2 1 K.U.Leuven, ESAT PSI, Belgium. IBBT, Belgium
Efficient Multi-Camera Detection, Tracking, and Identification using a Shared Set of Haar-Features Reyes Rios Cabrera 1, Tinne Tuytelaars 1 and Luc Van Gool 1,2 1 K.U.Leuven, ESAT PSI, Belgium. IBBT, Belgium
A glimpse at visual tracking
 A glimpse at visual tracking Patrick Pérez ENS-INRIA VRML Summer School ENS Paris, July 2013 https://research.technicolor.com/~patrickperez Outline Introduction What and why? Formalization Probabilistic
A glimpse at visual tracking Patrick Pérez ENS-INRIA VRML Summer School ENS Paris, July 2013 https://research.technicolor.com/~patrickperez Outline Introduction What and why? Formalization Probabilistic
Beyond Bags of Features
 : for Recognizing Natural Scene Categories Matching and Modeling Seminar Instructed by Prof. Haim J. Wolfson School of Computer Science Tel Aviv University December 9 th, 2015
: for Recognizing Natural Scene Categories Matching and Modeling Seminar Instructed by Prof. Haim J. Wolfson School of Computer Science Tel Aviv University December 9 th, 2015
TRANSPARENT OBJECT DETECTION USING REGIONS WITH CONVOLUTIONAL NEURAL NETWORK
 TRANSPARENT OBJECT DETECTION USING REGIONS WITH CONVOLUTIONAL NEURAL NETWORK 1 Po-Jen Lai ( 賴柏任 ), 2 Chiou-Shann Fuh ( 傅楸善 ) 1 Dept. of Electrical Engineering, National Taiwan University, Taiwan 2 Dept.
TRANSPARENT OBJECT DETECTION USING REGIONS WITH CONVOLUTIONAL NEURAL NETWORK 1 Po-Jen Lai ( 賴柏任 ), 2 Chiou-Shann Fuh ( 傅楸善 ) 1 Dept. of Electrical Engineering, National Taiwan University, Taiwan 2 Dept.
Object Category Detection: Sliding Windows
 03/18/10 Object Category Detection: Sliding Windows Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Goal: Detect all instances of objects Influential Works in Detection Sung-Poggio
03/18/10 Object Category Detection: Sliding Windows Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Goal: Detect all instances of objects Influential Works in Detection Sung-Poggio
Robust Visual Tracking via Convolutional Networks
 SUBMITTED 1 Robust Visual Tracking via Convolutional Networks Kaihua Zhang, Qingshan Liu, Yi Wu, and Ming-Hsuan Yang arxiv:1501.04505v2 [cs.cv] 24 Aug 2015 Abstract Deep networks have been successfully
SUBMITTED 1 Robust Visual Tracking via Convolutional Networks Kaihua Zhang, Qingshan Liu, Yi Wu, and Ming-Hsuan Yang arxiv:1501.04505v2 [cs.cv] 24 Aug 2015 Abstract Deep networks have been successfully
P-N Learning: Bootstrapping Binary Classifiers by Structural Constraints
 Published at the 23rd IEEE Conference on Computer Vision and Pattern Recognition, CVPR, June 3-8, San Francisco, CA, USA, 2 P-N Learning: Bootstrapping Binary Classifiers by Structural Constraints Zdenek
Published at the 23rd IEEE Conference on Computer Vision and Pattern Recognition, CVPR, June 3-8, San Francisco, CA, USA, 2 P-N Learning: Bootstrapping Binary Classifiers by Structural Constraints Zdenek
Fast CNN-Based Object Tracking Using Localization Layers and Deep Features Interpolation
 Fast CNN-Based Object Tracking Using Localization Layers and Deep Features Interpolation Al-Hussein A. El-Shafie Faculty of Engineering Cairo University Giza, Egypt elshafie_a@yahoo.com Mohamed Zaki Faculty
Fast CNN-Based Object Tracking Using Localization Layers and Deep Features Interpolation Al-Hussein A. El-Shafie Faculty of Engineering Cairo University Giza, Egypt elshafie_a@yahoo.com Mohamed Zaki Faculty
Human Motion Detection and Tracking for Video Surveillance
 Human Motion Detection and Tracking for Video Surveillance Prithviraj Banerjee and Somnath Sengupta Department of Electronics and Electrical Communication Engineering Indian Institute of Technology, Kharagpur,
Human Motion Detection and Tracking for Video Surveillance Prithviraj Banerjee and Somnath Sengupta Department of Electronics and Electrical Communication Engineering Indian Institute of Technology, Kharagpur,
Transferring Visual Prior for Online Object Tracking
 IEEE TRANSACTIONS ON IMAGE PROCESSING 1 Transferring Visual Prior for Online Object Tracking Qing Wang Feng Chen Jimei Yang Wenli Xu Ming-Hsuan Yang Abstract Visual prior from generic real-world images
IEEE TRANSACTIONS ON IMAGE PROCESSING 1 Transferring Visual Prior for Online Object Tracking Qing Wang Feng Chen Jimei Yang Wenli Xu Ming-Hsuan Yang Abstract Visual prior from generic real-world images
Window based detectors
 Window based detectors CS 554 Computer Vision Pinar Duygulu Bilkent University (Source: James Hays, Brown) Today Window-based generic object detection basic pipeline boosting classifiers face detection
Window based detectors CS 554 Computer Vision Pinar Duygulu Bilkent University (Source: James Hays, Brown) Today Window-based generic object detection basic pipeline boosting classifiers face detection
Multi-Cue Visual Tracking Using Robust Feature-Level Fusion Based on Joint Sparse Representation
 Multi-Cue Visual Tracking Using Robust Feature-Level Fusion Based on Joint Sparse Representation Xiangyuan Lan Andy J Ma Pong C Yuen Department of Computer Science, Hong Kong Baptist University {xylan,
Multi-Cue Visual Tracking Using Robust Feature-Level Fusion Based on Joint Sparse Representation Xiangyuan Lan Andy J Ma Pong C Yuen Department of Computer Science, Hong Kong Baptist University {xylan,
RoI Pooling Based Fast Multi-Domain Convolutional Neural Networks for Visual Tracking
 Advances in Intelligent Systems Research, volume 133 2nd International Conference on Artificial Intelligence and Industrial Engineering (AIIE2016) RoI Pooling Based Fast Multi-Domain Convolutional Neural
Advances in Intelligent Systems Research, volume 133 2nd International Conference on Artificial Intelligence and Industrial Engineering (AIIE2016) RoI Pooling Based Fast Multi-Domain Convolutional Neural
Implementation of Robust Visual Tracker by using Weighted Spatio-Temporal Context Learning Algorithm
 Available Online at www.ijcsmc.com International Journal of Computer Science and Mobile Computing A Monthly Journal of Computer Science and Information Technology ISSN 2320 088X IMPACT FACTOR: 5.258 IJCSMC,
Available Online at www.ijcsmc.com International Journal of Computer Science and Mobile Computing A Monthly Journal of Computer Science and Information Technology ISSN 2320 088X IMPACT FACTOR: 5.258 IJCSMC,
Regionlet Object Detector with Hand-crafted and CNN Feature
 Regionlet Object Detector with Hand-crafted and CNN Feature Xiaoyu Wang Research Xiaoyu Wang Research Ming Yang Horizon Robotics Shenghuo Zhu Alibaba Group Yuanqing Lin Baidu Overview of this section Regionlet
Regionlet Object Detector with Hand-crafted and CNN Feature Xiaoyu Wang Research Xiaoyu Wang Research Ming Yang Horizon Robotics Shenghuo Zhu Alibaba Group Yuanqing Lin Baidu Overview of this section Regionlet
A New Approach for Train Driver Tracking in Real Time. Ming-yu WANG, Si-le WANG, Li-ping CHEN, Xiang-yang CHEN, Zhen-chao CUI, Wen-zhu YANG *
 2018 International Conference on Modeling, Simulation and Analysis (ICMSA 2018) ISBN: 978-1-60595-544-5 A New Approach for Train Driver Tracking in Real Time Ming-yu WANG, Si-le WANG, Li-ping CHEN, Xiang-yang
2018 International Conference on Modeling, Simulation and Analysis (ICMSA 2018) ISBN: 978-1-60595-544-5 A New Approach for Train Driver Tracking in Real Time Ming-yu WANG, Si-le WANG, Li-ping CHEN, Xiang-yang