Tracking. Hao Guan( 管皓 ) School of Computer Science Fudan University
|
|
|
- Martina Bennett
- 5 years ago
- Views:
Transcription
1 Tracking Hao Guan( 管皓 ) School of Computer Science Fudan University
2
3


4
5 Multimedia Video Audio

6 Use your eyes Video Tracking
7 Use your ears Audio Tracking
8 Tracking Video Tracking
9 Definition Given a bounding box defining the initial position of an object in a single frame, automatically determine the object s bounding box in the following frames or indicate the object is not visible.

10 Why important? An important Mid-level of a vision system
11 Why important? One of the most practical areas of CV



12 Why difficult? Illumination Occlusion




13 Why difficult? Pose variants Clutter
14 Scale variant Why difficult?
15 Fast Motion Why difficult?
16 Single camera Multiple camera Re -identification Categories



17 Categories Static camera moving camera

18 Categories Single Object Multiple Object
19 Visible Infrared Categories
20 Categories Rigid Object Non-rigid Object
21 Evaluation Center Location Error average Euclidean distance between the center of the tracked target and the ground truth in all the frames of one video.
22 Evaluation Success Rate The success rate is the radio of the frames whose scores are larger than a given threshold.
23 The State-of-the-art trackers Tracking by detection is becoming popular. This stems directly from the development of powerful discriminative methods in machine learning and their application to detection with offline training. The discriminative trackers try to differentiate the target from the background by taking tracking as a binary classification problem.
24 Real-Time Compressive Tracking(CT) Core idea Facilitate an efficient project from the image feature space to a low-dimensional compressed space. Theoretical basis Compressive sensing theories A small number of randomly generated linear measurements can preserve most of the salient information and almost perfect reconstruct the signal
25 Dimension reduction Feature Extraction
26 Updating the classifier at the t-th frame Positive and negative samples are used to train a Naïve Bayes Classifier
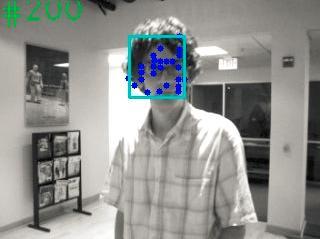
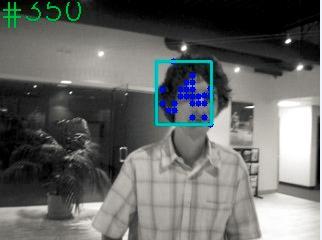
27 Tracking at the (t+1)-th frame The sample which has the highest score will be the tracked position.
28 Tracking at the (t+1)-th frame
29 Experiments




30 Experiments
31 Experiments
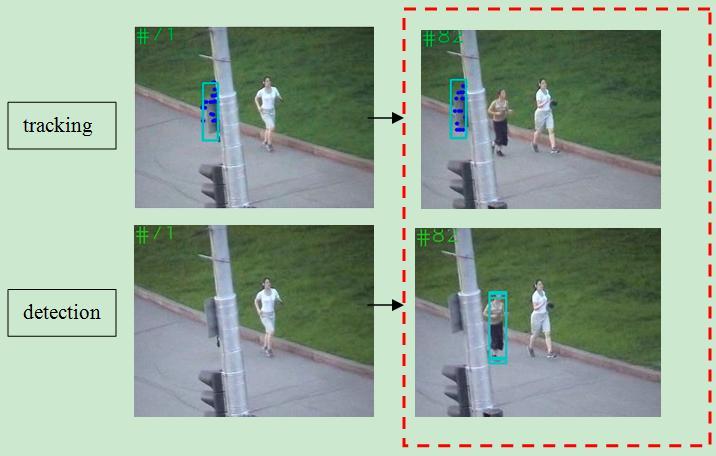
32 Tracking-Learning-Detection(TLD) Core idea Combination of motion tracking and object detection. Focused on long-term tracking. Use detector to relocate the tracker.
33 Framework Overview
34 Tracking Module of TLD Frame difference Background subtraction Optical flow
35 Optical Flow A classical, common, successful method
36 Optical Flow A classical, common, successful method
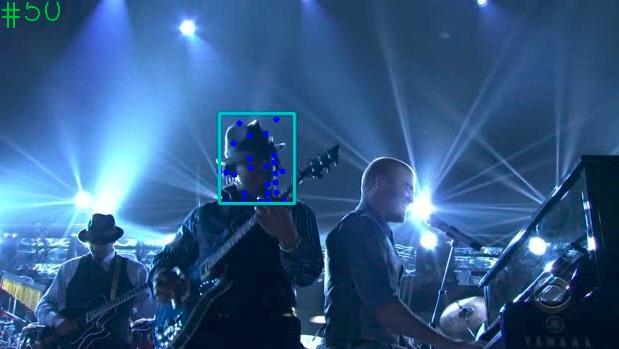
37 Median Flow for TLD Assumption A good tracker should have forward-backward consistency.
38 Median Flow for TLD Features can be simple Handle scale variants Simple and efficient Sensitive to illumination variants Lack of self-learning and update

39 Median Flow for TLD

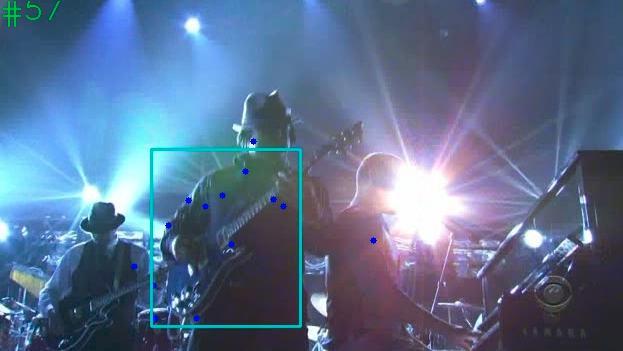
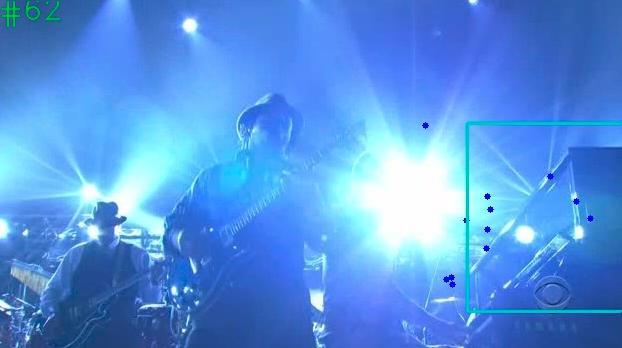
40 Median Flow for TLD
41 Median Flow for TLD

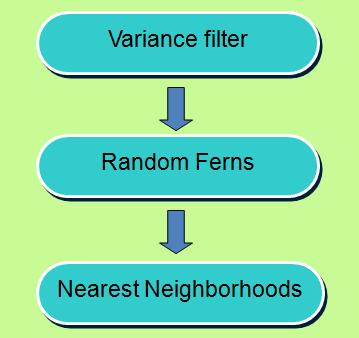
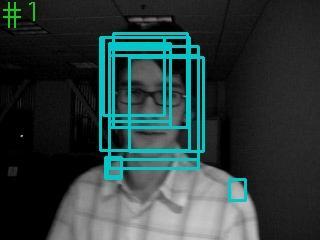
42 Detection Module of TLD

43 Variance Filter Remove patches that are smooth. Effective for the images that have smooth background
44 Variance Filter When background is more complicated, the effect will get worse.

45 Variance Filter When object is similar to the background, the effect will get worse.
46 Random Ferns Classifier The core part of the detector of TLD. Different from Random Forests same criterion for every layer, become linear
47 Feature Extraction LBP features Select two points A and B randomly from one patch, compare their intensity, if I(A) > I(B), then the feature value is 1, else is 0. Example: one patch passes a fern with 5 nodes.
48 Random Ferns Classifier If one fern has s nodes, then there will be 1+2 s feature values The samples of one class pass the fern, we can get the histogram of the prior probability.
49 Random Ferns Classifier Samples of different classes pass the fern, we can get corresponding histograms.
50 Random Ferns Classifier When a new patch passes the fern, if its feature is 00011( 3 ) for example, then find the max posterior probability from the given distribution.
51 Random Ferns Classifier We usually use a few ferns to form a random ferns classifier. Each fern has a vote.
52 Random Ferns Classifier In TLD, 13 nodes each fern, 10 ferns.

53

54 Nearest Neighborhood Compute the similarity with object models. Model
55 Integration
56 Conclusions & Future Directions There is not a perfect tracker. Select the most suitable one according to the application. New discriminative features. Dynamic and motion analysis.
57 Conclusions & Future Directions Depth information from multi-views. Re-identification. Integration of Video & Audio tracking
58 References Kaihua Zhang, Lei Zhang, Ming-Hsuan Yang. 20 Real-Time Compressive Tracking. ECCV, Zdenek Kalal, Krystian Mikolajczyk, Jiri Matas. Tracking-Learning-Detection. In PAMI, Kalal Z, Matas J, Mikolajczyk K. P-N learning: Bootstrapping binary classifiers by structural constraints. IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2010.
59
Automatic Initialization of the TLD Object Tracker: Milestone Update
 Automatic Initialization of the TLD Object Tracker: Milestone Update Louis Buck May 08, 2012 1 Background TLD is a long-term, real-time tracker designed to be robust to partial and complete occlusions
Automatic Initialization of the TLD Object Tracker: Milestone Update Louis Buck May 08, 2012 1 Background TLD is a long-term, real-time tracker designed to be robust to partial and complete occlusions
Struck: Structured Output Tracking with Kernels. Presented by Mike Liu, Yuhang Ming, and Jing Wang May 24, 2017
 Struck: Structured Output Tracking with Kernels Presented by Mike Liu, Yuhang Ming, and Jing Wang May 24, 2017 Motivations Problem: Tracking Input: Target Output: Locations over time http://vision.ucsd.edu/~bbabenko/images/fast.gif
Struck: Structured Output Tracking with Kernels Presented by Mike Liu, Yuhang Ming, and Jing Wang May 24, 2017 Motivations Problem: Tracking Input: Target Output: Locations over time http://vision.ucsd.edu/~bbabenko/images/fast.gif
Robustifying the Flock of Trackers
 1-Feb-11 Matas, Vojir : Robustifying the Flock of Trackers 1 Robustifying the Flock of Trackers Tomáš Vojíř and Jiří Matas {matas, vojirtom}@cmp.felk.cvut.cz Department of Cybernetics, Faculty of Electrical
1-Feb-11 Matas, Vojir : Robustifying the Flock of Trackers 1 Robustifying the Flock of Trackers Tomáš Vojíř and Jiří Matas {matas, vojirtom}@cmp.felk.cvut.cz Department of Cybernetics, Faculty of Electrical
Tracking-Learning-Detection
 IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 6, NO., JANUARY 200 Tracking-Learning-Detection Zdenek Kalal, Krystian Mikolajczyk, and Jiri Matas, Abstract Long-term tracking is the
IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 6, NO., JANUARY 200 Tracking-Learning-Detection Zdenek Kalal, Krystian Mikolajczyk, and Jiri Matas, Abstract Long-term tracking is the
2 Cascade detection and tracking
 3rd International Conference on Multimedia Technology(ICMT 213) A fast on-line boosting tracking algorithm based on cascade filter of multi-features HU Song, SUN Shui-Fa* 1, MA Xian-Bing, QIN Yin-Shi,
3rd International Conference on Multimedia Technology(ICMT 213) A fast on-line boosting tracking algorithm based on cascade filter of multi-features HU Song, SUN Shui-Fa* 1, MA Xian-Bing, QIN Yin-Shi,
IN computer vision develop mathematical techniques in
 International Journal of Scientific & Engineering Research Volume 4, Issue3, March-2013 1 Object Tracking Based On Tracking-Learning-Detection Rupali S. Chavan, Mr. S.M.Patil Abstract -In this paper; we
International Journal of Scientific & Engineering Research Volume 4, Issue3, March-2013 1 Object Tracking Based On Tracking-Learning-Detection Rupali S. Chavan, Mr. S.M.Patil Abstract -In this paper; we
A System for Real-time Detection and Tracking of Vehicles from a Single Car-mounted Camera
 A System for Real-time Detection and Tracking of Vehicles from a Single Car-mounted Camera Claudio Caraffi, Tomas Vojir, Jiri Trefny, Jan Sochman, Jiri Matas Toyota Motor Europe Center for Machine Perception,
A System for Real-time Detection and Tracking of Vehicles from a Single Car-mounted Camera Claudio Caraffi, Tomas Vojir, Jiri Trefny, Jan Sochman, Jiri Matas Toyota Motor Europe Center for Machine Perception,
REAL-TIME, LONG-TERM HAND TRACKING WITH UNSUPERVISED INITIALIZATION
 REAL-TIME, LONG-TERM HAND TRACKING WITH UNSUPERVISED INITIALIZATION Vincent Spruyt 1,2, Alessandro Ledda 1 and Wilfried Philips 2 1 Dept. of Applied Engineering: Electronics-ICT, Artesis University College
REAL-TIME, LONG-TERM HAND TRACKING WITH UNSUPERVISED INITIALIZATION Vincent Spruyt 1,2, Alessandro Ledda 1 and Wilfried Philips 2 1 Dept. of Applied Engineering: Electronics-ICT, Artesis University College
Tri-modal Human Body Segmentation
 Tri-modal Human Body Segmentation Master of Science Thesis Cristina Palmero Cantariño Advisor: Sergio Escalera Guerrero February 6, 2014 Outline 1 Introduction 2 Tri-modal dataset 3 Proposed baseline 4
Tri-modal Human Body Segmentation Master of Science Thesis Cristina Palmero Cantariño Advisor: Sergio Escalera Guerrero February 6, 2014 Outline 1 Introduction 2 Tri-modal dataset 3 Proposed baseline 4
Human Detection and Tracking for Video Surveillance: A Cognitive Science Approach
 Human Detection and Tracking for Video Surveillance: A Cognitive Science Approach Vandit Gajjar gajjar.vandit.381@ldce.ac.in Ayesha Gurnani gurnani.ayesha.52@ldce.ac.in Yash Khandhediya khandhediya.yash.364@ldce.ac.in
Human Detection and Tracking for Video Surveillance: A Cognitive Science Approach Vandit Gajjar gajjar.vandit.381@ldce.ac.in Ayesha Gurnani gurnani.ayesha.52@ldce.ac.in Yash Khandhediya khandhediya.yash.364@ldce.ac.in
Available online at ScienceDirect. Procedia Computer Science 54 (2015 )
") Available online at www.sciencedirect.com ScienceDirect Procedia Computer Science 54 (2015 ) 746 755 Eleventh International Multi-Conference on Information Processing-2015 (IMCIP-2015) Video-Based Face
Available online at www.sciencedirect.com ScienceDirect Procedia Computer Science 54 (2015 ) 746 755 Eleventh International Multi-Conference on Information Processing-2015 (IMCIP-2015) Video-Based Face
P-N Learning: Bootstrapping Binary Classifiers by Structural Constraints
 Published at the 23rd IEEE Conference on Computer Vision and Pattern Recognition, CVPR, June 3-8, San Francisco, CA, USA, 2 P-N Learning: Bootstrapping Binary Classifiers by Structural Constraints Zdenek
Published at the 23rd IEEE Conference on Computer Vision and Pattern Recognition, CVPR, June 3-8, San Francisco, CA, USA, 2 P-N Learning: Bootstrapping Binary Classifiers by Structural Constraints Zdenek
Evaluation and comparison of interest points/regions
 Introduction Evaluation and comparison of interest points/regions Quantitative evaluation of interest point/region detectors points / regions at the same relative location and area Repeatability rate :
Introduction Evaluation and comparison of interest points/regions Quantitative evaluation of interest point/region detectors points / regions at the same relative location and area Repeatability rate :
Prof. Feng Liu. Spring /26/2017
 Prof. Feng Liu Spring 2017 http://www.cs.pdx.edu/~fliu/courses/cs510/ 04/26/2017 Last Time Re-lighting HDR 2 Today Panorama Overview Feature detection Mid-term project presentation Not real mid-term 6
Prof. Feng Liu Spring 2017 http://www.cs.pdx.edu/~fliu/courses/cs510/ 04/26/2017 Last Time Re-lighting HDR 2 Today Panorama Overview Feature detection Mid-term project presentation Not real mid-term 6
Postprint.
 http://www.diva-portal.org Postprint This is the accepted version of a paper presented at 14th International Conference of the Biometrics Special Interest Group, BIOSIG, Darmstadt, Germany, 9-11 September,
http://www.diva-portal.org Postprint This is the accepted version of a paper presented at 14th International Conference of the Biometrics Special Interest Group, BIOSIG, Darmstadt, Germany, 9-11 September,
COSC160: Detection and Classification. Jeremy Bolton, PhD Assistant Teaching Professor
 COSC160: Detection and Classification Jeremy Bolton, PhD Assistant Teaching Professor Outline I. Problem I. Strategies II. Features for training III. Using spatial information? IV. Reducing dimensionality
COSC160: Detection and Classification Jeremy Bolton, PhD Assistant Teaching Professor Outline I. Problem I. Strategies II. Features for training III. Using spatial information? IV. Reducing dimensionality
Selection of Scale-Invariant Parts for Object Class Recognition
 Selection of Scale-Invariant Parts for Object Class Recognition Gy. Dorkó and C. Schmid INRIA Rhône-Alpes, GRAVIR-CNRS 655, av. de l Europe, 3833 Montbonnot, France fdorko,schmidg@inrialpes.fr Abstract
Selection of Scale-Invariant Parts for Object Class Recognition Gy. Dorkó and C. Schmid INRIA Rhône-Alpes, GRAVIR-CNRS 655, av. de l Europe, 3833 Montbonnot, France fdorko,schmidg@inrialpes.fr Abstract
Feature Based Registration - Image Alignment
 Feature Based Registration - Image Alignment Image Registration Image registration is the process of estimating an optimal transformation between two or more images. Many slides from Alexei Efros http://graphics.cs.cmu.edu/courses/15-463/2007_fall/463.html
Feature Based Registration - Image Alignment Image Registration Image registration is the process of estimating an optimal transformation between two or more images. Many slides from Alexei Efros http://graphics.cs.cmu.edu/courses/15-463/2007_fall/463.html
Aircraft Tracking Based on KLT Feature Tracker and Image Modeling
 Aircraft Tracking Based on KLT Feature Tracker and Image Modeling Khawar Ali, Shoab A. Khan, and Usman Akram Computer Engineering Department, College of Electrical & Mechanical Engineering, National University
Aircraft Tracking Based on KLT Feature Tracker and Image Modeling Khawar Ali, Shoab A. Khan, and Usman Akram Computer Engineering Department, College of Electrical & Mechanical Engineering, National University
HOG-based Pedestriant Detector Training
 HOG-based Pedestriant Detector Training evs embedded Vision Systems Srl c/o Computer Science Park, Strada Le Grazie, 15 Verona- Italy http: // www. embeddedvisionsystems. it Abstract This paper describes
HOG-based Pedestriant Detector Training evs embedded Vision Systems Srl c/o Computer Science Park, Strada Le Grazie, 15 Verona- Italy http: // www. embeddedvisionsystems. it Abstract This paper describes
Augmented Reality VU. Computer Vision 3D Registration (2) Prof. Vincent Lepetit
 Prof. Vincent Lepetit") Augmented Reality VU Computer Vision 3D Registration (2) Prof. Vincent Lepetit Feature Point-Based 3D Tracking Feature Points for 3D Tracking Much less ambiguous than edges; Point-to-point reprojection
Augmented Reality VU Computer Vision 3D Registration (2) Prof. Vincent Lepetit Feature Point-Based 3D Tracking Feature Points for 3D Tracking Much less ambiguous than edges; Point-to-point reprojection
Real-time Object Tracking via Online Discriminative Feature Selection
 IEEE TRANSACTION ON IMAGE PROCESSING 1 Real-time Object Tracking via Online Discriminative Feature Selection Kaihua Zhang, Lei Zhang, and Ming-Hsuan Yang Abstract Most tracking-by-detection algorithms
IEEE TRANSACTION ON IMAGE PROCESSING 1 Real-time Object Tracking via Online Discriminative Feature Selection Kaihua Zhang, Lei Zhang, and Ming-Hsuan Yang Abstract Most tracking-by-detection algorithms
Part-based Face Recognition Using Near Infrared Images
 Part-based Face Recognition Using Near Infrared Images Ke Pan Shengcai Liao Zhijian Zhang Stan Z. Li Peiren Zhang University of Science and Technology of China Hefei 230026, China Center for Biometrics
Part-based Face Recognition Using Near Infrared Images Ke Pan Shengcai Liao Zhijian Zhang Stan Z. Li Peiren Zhang University of Science and Technology of China Hefei 230026, China Center for Biometrics
Large-Scale Traffic Sign Recognition based on Local Features and Color Segmentation
 Large-Scale Traffic Sign Recognition based on Local Features and Color Segmentation M. Blauth, E. Kraft, F. Hirschenberger, M. Böhm Fraunhofer Institute for Industrial Mathematics, Fraunhofer-Platz 1,
Large-Scale Traffic Sign Recognition based on Local Features and Color Segmentation M. Blauth, E. Kraft, F. Hirschenberger, M. Böhm Fraunhofer Institute for Industrial Mathematics, Fraunhofer-Platz 1,
Part-based Face Recognition Using Near Infrared Images
 Part-based Face Recognition Using Near Infrared Images Ke Pan Shengcai Liao Zhijian Zhang Stan Z. Li Peiren Zhang University of Science and Technology of China Hefei 230026, China Center for Biometrics
Part-based Face Recognition Using Near Infrared Images Ke Pan Shengcai Liao Zhijian Zhang Stan Z. Li Peiren Zhang University of Science and Technology of China Hefei 230026, China Center for Biometrics
OBJECT tracking has been extensively studied in computer
 IEEE TRANSAION ON IMAGE PROCESSING 1 Real-time Object Tracking via Online Discriminative Feature Selection Kaihua Zhang, Lei Zhang, and Ming-Hsuan Yang Abstract Most tracking-by-detection algorithms train
IEEE TRANSAION ON IMAGE PROCESSING 1 Real-time Object Tracking via Online Discriminative Feature Selection Kaihua Zhang, Lei Zhang, and Ming-Hsuan Yang Abstract Most tracking-by-detection algorithms train
Online Spatial-temporal Data Fusion for Robust Adaptive Tracking
 Online Spatial-temporal Data Fusion for Robust Adaptive Tracking Jixu Chen Qiang Ji Department of Electrical, Computer, and Systems Engineering Rensselaer Polytechnic Institute, Troy, NY 12180-3590, USA
Online Spatial-temporal Data Fusion for Robust Adaptive Tracking Jixu Chen Qiang Ji Department of Electrical, Computer, and Systems Engineering Rensselaer Polytechnic Institute, Troy, NY 12180-3590, USA
Detecting and Identifying Moving Objects in Real-Time
 Chapter 9 Detecting and Identifying Moving Objects in Real-Time For surveillance applications or for human-computer interaction, the automated real-time tracking of moving objects in images from a stationary
Chapter 9 Detecting and Identifying Moving Objects in Real-Time For surveillance applications or for human-computer interaction, the automated real-time tracking of moving objects in images from a stationary
Robotics Programming Laboratory
 Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Computer Vision. Exercise Session 10 Image Categorization
 Computer Vision Exercise Session 10 Image Categorization Object Categorization Task Description Given a small number of training images of a category, recognize a-priori unknown instances of that category
Computer Vision Exercise Session 10 Image Categorization Object Categorization Task Description Given a small number of training images of a category, recognize a-priori unknown instances of that category
Keywords:- Object tracking, multiple instance learning, supervised learning, online boosting, ODFS tracker, classifier. IJSER
 International Journal of Scientific & Engineering Research, Volume 5, Issue 2, February-2014 37 Object Tracking via a Robust Feature Selection approach Prof. Mali M.D. manishamali2008@gmail.com Guide NBNSCOE
International Journal of Scientific & Engineering Research, Volume 5, Issue 2, February-2014 37 Object Tracking via a Robust Feature Selection approach Prof. Mali M.D. manishamali2008@gmail.com Guide NBNSCOE
The Kinect Sensor. Luís Carriço FCUL 2014/15
 Advanced Interaction Techniques The Kinect Sensor Luís Carriço FCUL 2014/15 Sources: MS Kinect for Xbox 360 John C. Tang. Using Kinect to explore NUI, Ms Research, From Stanford CS247 Shotton et al. Real-Time
Advanced Interaction Techniques The Kinect Sensor Luís Carriço FCUL 2014/15 Sources: MS Kinect for Xbox 360 John C. Tang. Using Kinect to explore NUI, Ms Research, From Stanford CS247 Shotton et al. Real-Time
Object Tracking using HOG and SVM
 Object Tracking using HOG and SVM Siji Joseph #1, Arun Pradeep #2 Electronics and Communication Engineering Axis College of Engineering and Technology, Ambanoly, Thrissur, India Abstract Object detection
Object Tracking using HOG and SVM Siji Joseph #1, Arun Pradeep #2 Electronics and Communication Engineering Axis College of Engineering and Technology, Ambanoly, Thrissur, India Abstract Object detection
Learning to Recognize Faces in Realistic Conditions
 000 001 002 003 004 005 006 007 008 009 010 011 012 013 014 015 016 017 018 019 020 021 022 023 024 025 026 027 028 029 030 031 032 033 034 035 036 037 038 039 040 041 042 043 044 045 046 047 048 049 050
000 001 002 003 004 005 006 007 008 009 010 011 012 013 014 015 016 017 018 019 020 021 022 023 024 025 026 027 028 029 030 031 032 033 034 035 036 037 038 039 040 041 042 043 044 045 046 047 048 049 050
Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks
 Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks Si Chen The George Washington University sichen@gwmail.gwu.edu Meera Hahn Emory University mhahn7@emory.edu Mentor: Afshin
Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks Si Chen The George Washington University sichen@gwmail.gwu.edu Meera Hahn Emory University mhahn7@emory.edu Mentor: Afshin
Babu Madhav Institute of Information Technology Years Integrated M.Sc.(IT)(Semester - 7)
(Semester - 7)") 5 Years Integrated M.Sc.(IT)(Semester - 7) 060010707 Digital Image Processing UNIT 1 Introduction to Image Processing Q: 1 Answer in short. 1. What is digital image? 1. Define pixel or picture element?
5 Years Integrated M.Sc.(IT)(Semester - 7) 060010707 Digital Image Processing UNIT 1 Introduction to Image Processing Q: 1 Answer in short. 1. What is digital image? 1. Define pixel or picture element?
Multiple-Person Tracking by Detection
 http://excel.fit.vutbr.cz Multiple-Person Tracking by Detection Jakub Vojvoda* Abstract Detection and tracking of multiple person is challenging problem mainly due to complexity of scene and large intra-class
http://excel.fit.vutbr.cz Multiple-Person Tracking by Detection Jakub Vojvoda* Abstract Detection and tracking of multiple person is challenging problem mainly due to complexity of scene and large intra-class
Slides for Data Mining by I. H. Witten and E. Frank
 Slides for Data Mining by I. H. Witten and E. Frank 7 Engineering the input and output Attribute selection Scheme-independent, scheme-specific Attribute discretization Unsupervised, supervised, error-
Slides for Data Mining by I. H. Witten and E. Frank 7 Engineering the input and output Attribute selection Scheme-independent, scheme-specific Attribute discretization Unsupervised, supervised, error-
Segmentation and Tracking of Partial Planar Templates
 Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Multi-Object Tracking Based on Tracking-Learning-Detection Framework
 Multi-Object Tracking Based on Tracking-Learning-Detection Framework Songlin Piao, Karsten Berns Robotics Research Lab University of Kaiserslautern Abstract. This paper shows the framework of robust long-term
Multi-Object Tracking Based on Tracking-Learning-Detection Framework Songlin Piao, Karsten Berns Robotics Research Lab University of Kaiserslautern Abstract. This paper shows the framework of robust long-term
Robert Collins CSE598G. Intro to Template Matching and the Lucas-Kanade Method
 Intro to Template Matching and the Lucas-Kanade Method Appearance-Based Tracking current frame + previous location likelihood over object location current location appearance model (e.g. image template,
Intro to Template Matching and the Lucas-Kanade Method Appearance-Based Tracking current frame + previous location likelihood over object location current location appearance model (e.g. image template,
Towards Robust Visual Object Tracking: Proposal Selection & Occlusion Reasoning Yang HUA
 Towards Robust Visual Object Tracking: Proposal Selection & Occlusion Reasoning Yang HUA PhD Defense, June 10 2016 Rapporteur Rapporteur Examinateur Examinateur Directeur de these Co-encadrant de these
Towards Robust Visual Object Tracking: Proposal Selection & Occlusion Reasoning Yang HUA PhD Defense, June 10 2016 Rapporteur Rapporteur Examinateur Examinateur Directeur de these Co-encadrant de these
PROBLEM FORMULATION AND RESEARCH METHODOLOGY
 PROBLEM FORMULATION AND RESEARCH METHODOLOGY ON THE SOFT COMPUTING BASED APPROACHES FOR OBJECT DETECTION AND TRACKING IN VIDEOS CHAPTER 3 PROBLEM FORMULATION AND RESEARCH METHODOLOGY The foregoing chapter
PROBLEM FORMULATION AND RESEARCH METHODOLOGY ON THE SOFT COMPUTING BASED APPROACHES FOR OBJECT DETECTION AND TRACKING IN VIDEOS CHAPTER 3 PROBLEM FORMULATION AND RESEARCH METHODOLOGY The foregoing chapter
Pairwise Threshold for Gaussian Mixture Classification and its Application on Human Tracking Enhancement
 Pairwise Threshold for Gaussian Mixture Classification and its Application on Human Tracking Enhancement Daegeon Kim Sung Chun Lee Institute for Robotics and Intelligent Systems University of Southern
Pairwise Threshold for Gaussian Mixture Classification and its Application on Human Tracking Enhancement Daegeon Kim Sung Chun Lee Institute for Robotics and Intelligent Systems University of Southern
Detection and Classification of Vehicles
 Detection and Classification of Vehicles Gupte et al. 2002 Zeeshan Mohammad ECG 782 Dr. Brendan Morris. Introduction Previously, magnetic loop detectors were used to count vehicles passing over them. Advantages
Detection and Classification of Vehicles Gupte et al. 2002 Zeeshan Mohammad ECG 782 Dr. Brendan Morris. Introduction Previously, magnetic loop detectors were used to count vehicles passing over them. Advantages
A Novel Target Algorithm based on TLD Combining with SLBP
 Available online at www.ijpe-online.com Vol. 13, No. 4, July 2017, pp. 458-468 DOI: 10.23940/ijpe.17.04.p13.458468 A Novel Target Algorithm based on TLD Combining with SLBP Jitao Zhang a, Aili Wang a,
Available online at www.ijpe-online.com Vol. 13, No. 4, July 2017, pp. 458-468 DOI: 10.23940/ijpe.17.04.p13.458468 A Novel Target Algorithm based on TLD Combining with SLBP Jitao Zhang a, Aili Wang a,
Object Detection by 3D Aspectlets and Occlusion Reasoning
 Object Detection by 3D Aspectlets and Occlusion Reasoning Yu Xiang University of Michigan Silvio Savarese Stanford University In the 4th International IEEE Workshop on 3D Representation and Recognition
Object Detection by 3D Aspectlets and Occlusion Reasoning Yu Xiang University of Michigan Silvio Savarese Stanford University In the 4th International IEEE Workshop on 3D Representation and Recognition
Dynamic Shape Tracking via Region Matching
 Dynamic Shape Tracking via Region Matching Ganesh Sundaramoorthi Asst. Professor of EE and AMCS KAUST (Joint work with Yanchao Yang) The Problem: Shape Tracking Given: exact object segmentation in frame1
Dynamic Shape Tracking via Region Matching Ganesh Sundaramoorthi Asst. Professor of EE and AMCS KAUST (Joint work with Yanchao Yang) The Problem: Shape Tracking Given: exact object segmentation in frame1
Pixel-Pair Features Selection for Vehicle Tracking
 2013 Second IAPR Asian Conference on Pattern Recognition Pixel-Pair Features Selection for Vehicle Tracking Zhibin Zhang, Xuezhen Li, Takio Kurita Graduate School of Engineering Hiroshima University Higashihiroshima,
2013 Second IAPR Asian Conference on Pattern Recognition Pixel-Pair Features Selection for Vehicle Tracking Zhibin Zhang, Xuezhen Li, Takio Kurita Graduate School of Engineering Hiroshima University Higashihiroshima,
Weighted Multi-scale Local Binary Pattern Histograms for Face Recognition
 Weighted Multi-scale Local Binary Pattern Histograms for Face Recognition Olegs Nikisins Institute of Electronics and Computer Science 14 Dzerbenes Str., Riga, LV1006, Latvia Email: Olegs.Nikisins@edi.lv
Weighted Multi-scale Local Binary Pattern Histograms for Face Recognition Olegs Nikisins Institute of Electronics and Computer Science 14 Dzerbenes Str., Riga, LV1006, Latvia Email: Olegs.Nikisins@edi.lv
Automatic Tracking of Moving Objects in Video for Surveillance Applications
 Automatic Tracking of Moving Objects in Video for Surveillance Applications Manjunath Narayana Committee: Dr. Donna Haverkamp (Chair) Dr. Arvin Agah Dr. James Miller Department of Electrical Engineering
Automatic Tracking of Moving Objects in Video for Surveillance Applications Manjunath Narayana Committee: Dr. Donna Haverkamp (Chair) Dr. Arvin Agah Dr. James Miller Department of Electrical Engineering
CS4495/6495 Introduction to Computer Vision. 8C-L1 Classification: Discriminative models
 CS4495/6495 Introduction to Computer Vision 8C-L1 Classification: Discriminative models Remember: Supervised classification Given a collection of labeled examples, come up with a function that will predict
CS4495/6495 Introduction to Computer Vision 8C-L1 Classification: Discriminative models Remember: Supervised classification Given a collection of labeled examples, come up with a function that will predict
Recognition of Animal Skin Texture Attributes in the Wild. Amey Dharwadker (aap2174) Kai Zhang (kz2213)
 Kai Zhang (kz2213)") Recognition of Animal Skin Texture Attributes in the Wild Amey Dharwadker (aap2174) Kai Zhang (kz2213) Motivation Patterns and textures are have an important role in object description and understanding
Recognition of Animal Skin Texture Attributes in the Wild Amey Dharwadker (aap2174) Kai Zhang (kz2213) Motivation Patterns and textures are have an important role in object description and understanding
Category vs. instance recognition
 Category vs. instance recognition Category: Find all the people Find all the buildings Often within a single image Often sliding window Instance: Is this face James? Find this specific famous building
Category vs. instance recognition Category: Find all the people Find all the buildings Often within a single image Often sliding window Instance: Is this face James? Find this specific famous building
ONLINE SELECTION OF DISCRIMINATIVE PIXEL-PAIR FEATURE FOR TRACKING
 ONLINE SELECTION OF DISCRIMINATIVE PIXEL-PAIR FEATURE FOR TRACKING Kenji Nishida Neuroscience Research Institute National Institute of Advanced Industrial Science and Technology (AIST) Central 2, -- Umezono
ONLINE SELECTION OF DISCRIMINATIVE PIXEL-PAIR FEATURE FOR TRACKING Kenji Nishida Neuroscience Research Institute National Institute of Advanced Industrial Science and Technology (AIST) Central 2, -- Umezono
Local Image Features
 Local Image Features Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial This section: correspondence and alignment
Local Image Features Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial This section: correspondence and alignment
Beyond Bags of Features
 : for Recognizing Natural Scene Categories Matching and Modeling Seminar Instructed by Prof. Haim J. Wolfson School of Computer Science Tel Aviv University December 9 th, 2015
: for Recognizing Natural Scene Categories Matching and Modeling Seminar Instructed by Prof. Haim J. Wolfson School of Computer Science Tel Aviv University December 9 th, 2015
Non-Parametric Modeling
 Non-Parametric Modeling CE-725: Statistical Pattern Recognition Sharif University of Technology Spring 2013 Soleymani Outline Introduction Non-Parametric Density Estimation Parzen Windows Kn-Nearest Neighbor
Non-Parametric Modeling CE-725: Statistical Pattern Recognition Sharif University of Technology Spring 2013 Soleymani Outline Introduction Non-Parametric Density Estimation Parzen Windows Kn-Nearest Neighbor
Announcements. CS 188: Artificial Intelligence Spring Generative vs. Discriminative. Classification: Feature Vectors. Project 4: due Friday.
 CS 188: Artificial Intelligence Spring 2011 Lecture 21: Perceptrons 4/13/2010 Announcements Project 4: due Friday. Final Contest: up and running! Project 5 out! Pieter Abbeel UC Berkeley Many slides adapted
CS 188: Artificial Intelligence Spring 2011 Lecture 21: Perceptrons 4/13/2010 Announcements Project 4: due Friday. Final Contest: up and running! Project 5 out! Pieter Abbeel UC Berkeley Many slides adapted
Lecture 18: Human Motion Recognition
 Lecture 18: Human Motion Recognition Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Introduction Motion classification using template matching Motion classification i using spatio
Lecture 18: Human Motion Recognition Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Introduction Motion classification using template matching Motion classification i using spatio
Machine Learning Techniques for Data Mining
 Machine Learning Techniques for Data Mining Eibe Frank University of Waikato New Zealand 10/25/2000 1 PART VII Moving on: Engineering the input and output 10/25/2000 2 Applying a learner is not all Already
Machine Learning Techniques for Data Mining Eibe Frank University of Waikato New Zealand 10/25/2000 1 PART VII Moving on: Engineering the input and output 10/25/2000 2 Applying a learner is not all Already
Hand Posture Recognition Using Adaboost with SIFT for Human Robot Interaction
 Hand Posture Recognition Using Adaboost with SIFT for Human Robot Interaction Chieh-Chih Wang and Ko-Chih Wang Department of Computer Science and Information Engineering Graduate Institute of Networking
Hand Posture Recognition Using Adaboost with SIFT for Human Robot Interaction Chieh-Chih Wang and Ko-Chih Wang Department of Computer Science and Information Engineering Graduate Institute of Networking
Describable Visual Attributes for Face Verification and Image Search
 Advanced Topics in Multimedia Analysis and Indexing, Spring 2011, NTU. 1 Describable Visual Attributes for Face Verification and Image Search Kumar, Berg, Belhumeur, Nayar. PAMI, 2011. Ryan Lei 2011/05/05
Advanced Topics in Multimedia Analysis and Indexing, Spring 2011, NTU. 1 Describable Visual Attributes for Face Verification and Image Search Kumar, Berg, Belhumeur, Nayar. PAMI, 2011. Ryan Lei 2011/05/05
Face Detection and Recognition in an Image Sequence using Eigenedginess
 Face Detection and Recognition in an Image Sequence using Eigenedginess B S Venkatesh, S Palanivel and B Yegnanarayana Department of Computer Science and Engineering. Indian Institute of Technology, Madras
Face Detection and Recognition in an Image Sequence using Eigenedginess B S Venkatesh, S Palanivel and B Yegnanarayana Department of Computer Science and Engineering. Indian Institute of Technology, Madras
A Novel Extreme Point Selection Algorithm in SIFT
 A Novel Extreme Point Selection Algorithm in SIFT Ding Zuchun School of Electronic and Communication, South China University of Technolog Guangzhou, China zucding@gmail.com Abstract. This paper proposes
A Novel Extreme Point Selection Algorithm in SIFT Ding Zuchun School of Electronic and Communication, South China University of Technolog Guangzhou, China zucding@gmail.com Abstract. This paper proposes
Online Object Tracking with Proposal Selection. Yang Hua Karteek Alahari Cordelia Schmid Inria Grenoble Rhône-Alpes, France
 Online Object Tracking with Proposal Selection Yang Hua Karteek Alahari Cordelia Schmid Inria Grenoble Rhône-Alpes, France Outline 2 Background Our approach Experimental results Summary Background 3 Tracking-by-detection
Online Object Tracking with Proposal Selection Yang Hua Karteek Alahari Cordelia Schmid Inria Grenoble Rhône-Alpes, France Outline 2 Background Our approach Experimental results Summary Background 3 Tracking-by-detection
Vehicle Tracking using Optical Features
 Vehicle Tracking using Optical Features Songlin Piao Robotics Research Lab University of Kaiserslautern, Germany Outline Motivation State-of-Art Proposed System Experiments Conclusion Motivation Autonomous
Vehicle Tracking using Optical Features Songlin Piao Robotics Research Lab University of Kaiserslautern, Germany Outline Motivation State-of-Art Proposed System Experiments Conclusion Motivation Autonomous
Computer Vision with MATLAB
 Computer Vision with MATLAB Master Class Bruce Tannenbaum 2011 The MathWorks, Inc. 1 Agenda Introduction Feature-based registration Automatic image registration Rotation correction with SURF Stereo image
Computer Vision with MATLAB Master Class Bruce Tannenbaum 2011 The MathWorks, Inc. 1 Agenda Introduction Feature-based registration Automatic image registration Rotation correction with SURF Stereo image
Computer Vision for HCI. Topics of This Lecture
 Computer Vision for HCI Interest Points Topics of This Lecture Local Invariant Features Motivation Requirements, Invariances Keypoint Localization Features from Accelerated Segment Test (FAST) Harris Shi-Tomasi
Computer Vision for HCI Interest Points Topics of This Lecture Local Invariant Features Motivation Requirements, Invariances Keypoint Localization Features from Accelerated Segment Test (FAST) Harris Shi-Tomasi
Computer Vision with MATLAB MATLAB Expo 2012 Steve Kuznicki
 Computer Vision with MATLAB MATLAB Expo 2012 Steve Kuznicki 2011 The MathWorks, Inc. 1 Today s Topics Introduction Computer Vision Feature-based registration Automatic image registration Object recognition/rotation
Computer Vision with MATLAB MATLAB Expo 2012 Steve Kuznicki 2011 The MathWorks, Inc. 1 Today s Topics Introduction Computer Vision Feature-based registration Automatic image registration Object recognition/rotation
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
arxiv: v1 [cs.cv] 19 May 2018
![arxiv: v1 [cs.cv] 19 May 2018](/thumbs/95/124798002.jpg "arxiv: v1 [cs.cv] 19 May 2018") Long-term face tracking in the wild using deep learning Kunlei Zhang a, Elaheh Barati a, Elaheh Rashedi a,, Xue-wen Chen a a Dept. of Computer Science, Wayne State University, Detroit, MI arxiv:1805.07646v1
Long-term face tracking in the wild using deep learning Kunlei Zhang a, Elaheh Barati a, Elaheh Rashedi a,, Xue-wen Chen a a Dept. of Computer Science, Wayne State University, Detroit, MI arxiv:1805.07646v1
Previously. Part-based and local feature models for generic object recognition. Bag-of-words model 4/20/2011
 Previously Part-based and local feature models for generic object recognition Wed, April 20 UT-Austin Discriminative classifiers Boosting Nearest neighbors Support vector machines Useful for object recognition
Previously Part-based and local feature models for generic object recognition Wed, April 20 UT-Austin Discriminative classifiers Boosting Nearest neighbors Support vector machines Useful for object recognition
Chamfer matching. More on template matching. Distance transform example. Computing the distance transform. Shape based matching.
 Chamfer matching Given: binary image, B, of edge and local feature locations binary edge template, T, of shape we want to match More on template matching Shape based matching Let D be an array in registration
Chamfer matching Given: binary image, B, of edge and local feature locations binary edge template, T, of shape we want to match More on template matching Shape based matching Let D be an array in registration
Learning based face hallucination techniques: A survey
 Vol. 3 (2014-15) pp. 37-45. : A survey Premitha Premnath K Department of Computer Science & Engineering Vidya Academy of Science & Technology Thrissur - 680501, Kerala, India (email: premithakpnath@gmail.com)
Vol. 3 (2014-15) pp. 37-45. : A survey Premitha Premnath K Department of Computer Science & Engineering Vidya Academy of Science & Technology Thrissur - 680501, Kerala, India (email: premithakpnath@gmail.com)
Detection III: Analyzing and Debugging Detection Methods
 CS 1699: Intro to Computer Vision Detection III: Analyzing and Debugging Detection Methods Prof. Adriana Kovashka University of Pittsburgh November 17, 2015 Today Review: Deformable part models How can
CS 1699: Intro to Computer Vision Detection III: Analyzing and Debugging Detection Methods Prof. Adriana Kovashka University of Pittsburgh November 17, 2015 Today Review: Deformable part models How can
Pedestrian Detection with Occlusion Handling
 Pedestrian Detection with Occlusion Handling Yawar Rehman 1, Irfan Riaz 2, Fan Xue 3, Jingchun Piao 4, Jameel Ahmed Khan 5 and Hyunchul Shin 6 Department of Electronics and Communication Engineering, Hanyang
Pedestrian Detection with Occlusion Handling Yawar Rehman 1, Irfan Riaz 2, Fan Xue 3, Jingchun Piao 4, Jameel Ahmed Khan 5 and Hyunchul Shin 6 Department of Electronics and Communication Engineering, Hanyang
Patch-Based Image Classification Using Image Epitomes
 Patch-Based Image Classification Using Image Epitomes David Andrzejewski CS 766 - Final Project December 19, 2005 Abstract Automatic image classification has many practical applications, including photo
Patch-Based Image Classification Using Image Epitomes David Andrzejewski CS 766 - Final Project December 19, 2005 Abstract Automatic image classification has many practical applications, including photo
Supervised texture detection in images
 Supervised texture detection in images Branislav Mičušík and Allan Hanbury Pattern Recognition and Image Processing Group, Institute of Computer Aided Automation, Vienna University of Technology Favoritenstraße
Supervised texture detection in images Branislav Mičušík and Allan Hanbury Pattern Recognition and Image Processing Group, Institute of Computer Aided Automation, Vienna University of Technology Favoritenstraße
International Journal of Modern Engineering and Research Technology
 Volume 4, Issue 3, July 2017 ISSN: 2348-8565 (Online) International Journal of Modern Engineering and Research Technology Website: http://www.ijmert.org Email: editor.ijmert@gmail.com A Novel Approach
Volume 4, Issue 3, July 2017 ISSN: 2348-8565 (Online) International Journal of Modern Engineering and Research Technology Website: http://www.ijmert.org Email: editor.ijmert@gmail.com A Novel Approach
Patch Descriptors. EE/CSE 576 Linda Shapiro
 Patch Descriptors EE/CSE 576 Linda Shapiro 1 How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Patch Descriptors EE/CSE 576 Linda Shapiro 1 How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Object Category Detection: Sliding Windows
 04/10/12 Object Category Detection: Sliding Windows Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical
04/10/12 Object Category Detection: Sliding Windows Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical
Utilizing Graphics Processing Units for Rapid Facial Recognition using Video Input
 Utilizing Graphics Processing Units for Rapid Facial Recognition using Video Input Charles Gala, Dr. Raj Acharya Department of Computer Science and Engineering Pennsylvania State University State College,
Utilizing Graphics Processing Units for Rapid Facial Recognition using Video Input Charles Gala, Dr. Raj Acharya Department of Computer Science and Engineering Pennsylvania State University State College,
Motion Estimation for Video Coding Standards
 Motion Estimation for Video Coding Standards Prof. Ja-Ling Wu Department of Computer Science and Information Engineering National Taiwan University Introduction of Motion Estimation The goal of video compression
Motion Estimation for Video Coding Standards Prof. Ja-Ling Wu Department of Computer Science and Information Engineering National Taiwan University Introduction of Motion Estimation The goal of video compression
Disguised Face Identification (DFI) with Facial KeyPoints using Spatial Fusion Convolutional Network. Nathan Sun CIS601
 with Facial KeyPoints using Spatial Fusion Convolutional Network. Nathan Sun CIS601") Disguised Face Identification (DFI) with Facial KeyPoints using Spatial Fusion Convolutional Network Nathan Sun CIS601 Introduction Face ID is complicated by alterations to an individual s appearance Beard,
Disguised Face Identification (DFI) with Facial KeyPoints using Spatial Fusion Convolutional Network Nathan Sun CIS601 Introduction Face ID is complicated by alterations to an individual s appearance Beard,
Generic Face Alignment Using an Improved Active Shape Model
 Generic Face Alignment Using an Improved Active Shape Model Liting Wang, Xiaoqing Ding, Chi Fang Electronic Engineering Department, Tsinghua University, Beijing, China {wanglt, dxq, fangchi} @ocrserv.ee.tsinghua.edu.cn
Generic Face Alignment Using an Improved Active Shape Model Liting Wang, Xiaoqing Ding, Chi Fang Electronic Engineering Department, Tsinghua University, Beijing, China {wanglt, dxq, fangchi} @ocrserv.ee.tsinghua.edu.cn
Real Time Face Tracking By Using Naïve Bayes Classifier
 Real Time Face Tracking By Using Naïve Bayes Classifier Krishna Priya Arni 1, Satish Ammuloju 2, Jagan Mohan Vithalachari Gollapalli 3, Dinesh Bhogapurapu 4) Shaik Azeez 5 Student, Department of ECE, Lendi
Real Time Face Tracking By Using Naïve Bayes Classifier Krishna Priya Arni 1, Satish Ammuloju 2, Jagan Mohan Vithalachari Gollapalli 3, Dinesh Bhogapurapu 4) Shaik Azeez 5 Student, Department of ECE, Lendi
INTELLIGENT AUTONOMOUS SYSTEMS LAB
 Matteo Munaro 1,3, Alex Horn 2, Randy Illum 2, Jeff Burke 2, and Radu Bogdan Rusu 3 1 IAS-Lab at Department of Information Engineering, University of Padova 2 Center for Research in Engineering, Media
Matteo Munaro 1,3, Alex Horn 2, Randy Illum 2, Jeff Burke 2, and Radu Bogdan Rusu 3 1 IAS-Lab at Department of Information Engineering, University of Padova 2 Center for Research in Engineering, Media
Object Recognition with Invariant Features
 Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
Applications Video Surveillance (On-line or off-line)
") Face Face Recognition: Dimensionality Reduction Biometrics CSE 190-a Lecture 12 CSE190a Fall 06 CSE190a Fall 06 Face Recognition Face is the most common biometric used by humans Applications range from
Face Face Recognition: Dimensionality Reduction Biometrics CSE 190-a Lecture 12 CSE190a Fall 06 CSE190a Fall 06 Face Recognition Face is the most common biometric used by humans Applications range from
Stereo and Epipolar geometry
 Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
A Real Time Facial Expression Classification System Using Local Binary Patterns
 A Real Time Facial Expression Classification System Using Local Binary Patterns S L Happy, Anjith George, and Aurobinda Routray Department of Electrical Engineering, IIT Kharagpur, India Abstract Facial
A Real Time Facial Expression Classification System Using Local Binary Patterns S L Happy, Anjith George, and Aurobinda Routray Department of Electrical Engineering, IIT Kharagpur, India Abstract Facial
SE 263 R. Venkatesh Babu. Object Tracking. R. Venkatesh Babu
 Object Tracking R. Venkatesh Babu Primitive tracking Appearance based - Template Matching Assumptions: Object description derived from first frame No change in object appearance Movement only 2D translation
Object Tracking R. Venkatesh Babu Primitive tracking Appearance based - Template Matching Assumptions: Object description derived from first frame No change in object appearance Movement only 2D translation
Image Features: Local Descriptors. Sanja Fidler CSC420: Intro to Image Understanding 1/ 58
 Image Features: Local Descriptors Sanja Fidler CSC420: Intro to Image Understanding 1/ 58 [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 2/ 58 Local Features Detection: Identify
Image Features: Local Descriptors Sanja Fidler CSC420: Intro to Image Understanding 1/ 58 [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 2/ 58 Local Features Detection: Identify
Feature Extractors. CS 188: Artificial Intelligence Fall Some (Vague) Biology. The Binary Perceptron. Binary Decision Rule.
 Biology. The Binary Perceptron. Binary Decision Rule.") CS 188: Artificial Intelligence Fall 2008 Lecture 24: Perceptrons II 11/24/2008 Dan Klein UC Berkeley Feature Extractors A feature extractor maps inputs to feature vectors Dear Sir. First, I must solicit
CS 188: Artificial Intelligence Fall 2008 Lecture 24: Perceptrons II 11/24/2008 Dan Klein UC Berkeley Feature Extractors A feature extractor maps inputs to feature vectors Dear Sir. First, I must solicit
3D Computer Vision. Structured Light II. Prof. Didier Stricker. Kaiserlautern University.
 3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
BOP: Benchmark for 6D Object Pose Estimation
 BOP: Benchmark for 6D Object Pose Estimation Hodan, Michel, Brachmann, Kehl, Buch, Kraft, Drost, Vidal, Ihrke, Zabulis, Sahin, Manhardt, Tombari, Kim, Matas, Rother 4th International Workshop on Recovering
BOP: Benchmark for 6D Object Pose Estimation Hodan, Michel, Brachmann, Kehl, Buch, Kraft, Drost, Vidal, Ihrke, Zabulis, Sahin, Manhardt, Tombari, Kim, Matas, Rother 4th International Workshop on Recovering
Local features: detection and description. Local invariant features
 Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
Digital Image Restoration
 Digital Image Restoration Blur as a chance and not a nuisance Filip Šroubek sroubekf@utia.cas.cz www.utia.cas.cz Institute of Information Theory and Automation Academy of Sciences of the Czech Republic
Digital Image Restoration Blur as a chance and not a nuisance Filip Šroubek sroubekf@utia.cas.cz www.utia.cas.cz Institute of Information Theory and Automation Academy of Sciences of the Czech Republic
Pedestrian Detection with Improved LBP and Hog Algorithm
 Open Access Library Journal 2018, Volume 5, e4573 ISSN Online: 2333-9721 ISSN Print: 2333-9705 Pedestrian Detection with Improved LBP and Hog Algorithm Wei Zhou, Suyun Luo Automotive Engineering College,
Open Access Library Journal 2018, Volume 5, e4573 ISSN Online: 2333-9721 ISSN Print: 2333-9705 Pedestrian Detection with Improved LBP and Hog Algorithm Wei Zhou, Suyun Luo Automotive Engineering College,