Detection III: Analyzing and Debugging Detection Methods
|
|
|
- Dwain Elliott
- 5 years ago
- Views:
Transcription
1 CS 1699: Intro to Computer Vision Detection III: Analyzing and Debugging Detection Methods Prof. Adriana Kovashka University of Pittsburgh November 17, 2015
2 Today Review: Deformable part models How can we speed up detection? In what ways does detection fail? How can we visualize features and models?




3 Parts-based Models Define object by collection of parts modeled by 1. Appearance 2. Spatial configuration Rob Fergus
4 How to model spatial relations? Star-shaped model X = X Part Part Part X Root Part Part Derek Hoiem


5 Implicit shape models: Training 1. Build vocabulary of patches around extracted interest points using clustering 2. Map the patch around each interest point to closest word 3. For each word, store all positions it was found, relative to object center Lana Lazebnik

6 Implicit shape models: Testing 1. Given new test image, extract patches, match to vocabulary words 2. Cast votes for possible positions of object center 3. Search for maxima in voting space Lana Lazebnik
 Bin gradients")

7 Histograms of oriented gradients (HOG) Bin gradients from 8x8 pixel neighborhoods into 9 orientations (Dalal & Triggs CVPR 05)


8 Discriminative part-based models Root filter Part filters Deformation weights P. Felzenszwalb, R. Girshick, D. McAllester, D. Ramanan, Object Detection with Discriminatively Trained Part Based Models, PAMI 32(9), 2010 Lana Lazebnik



9 Scoring an object hypothesis The score of a hypothesis is the sum of appearance scores minus the sum of deformation costs Subwindow features n n i ( dxi, dyi, dxi, dyi i 0 i 1 score( p,..., pn) Fi H( pi ) D Displacements ) Appearance weights Deformation weights Adapted from Lana Lazebnik
10 What is an Object? B. Alexe, T. Deselaers, and V. Ferrari Computer Vision and Pattern Recognition (CVPR) 2010

11 Speeding up detection: Restrict set of windows we pass through SVM to those w/ high objectness Alexe et al., CVPR 2010

12 Alexe et al., CVPR 2010 Objectness cue #1: Where people look

13 Objectness cue #2: color contrast at boundary Alexe et al., CVPR 2010

14 Objectness cue #3: no segments straddling the object box Alexe et al., CVPR 2010


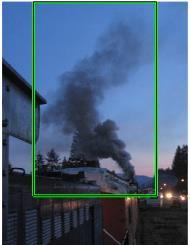
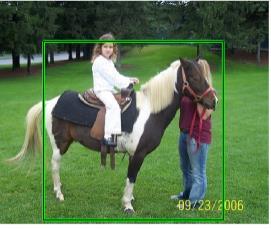
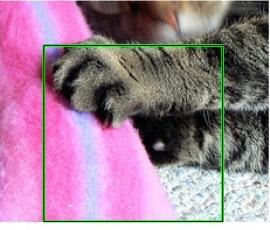
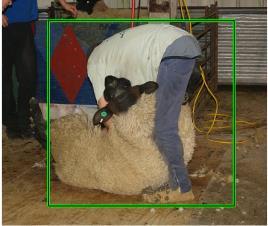
15 Boxes found to have high objectness Cyan = ground truth bounding boxes, yellow = correct and red = incorrect predictions for objectness Only run the sheep / horse / chair etc. classifier on the yellow/red boxes. Alexe et al., CVPR 2010
16 Today Review: Deformable part models How can we speed up detection? In what ways does detection fail? How can we visualize features and detections?
17 Diagnosing Error in Object Detectors D. Hoiem, Y. Chodpathumwan and Q. Dai European Conference on Computer Vision (ECCV) 2012





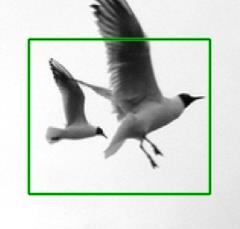
18 Object detection is a collection of problems Intra-class Variation for Airplane Occlusion Shape Viewpoint Distance Hoiem et al., ECCV 2012










19 Object detection is a collection of problems Confusing Distractors for Airplane Background Similar Categories Dissimilar Categories Localization Error Hoiem et al., ECCV 2012




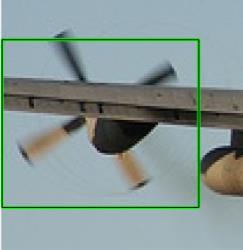






20 Top false positives: Airplane (DPM) AP = Background 27% Localization 29% Other Objects 11% Similar Objects 33% Bird, Boat, Car Hoiem et al., ECCV 2012










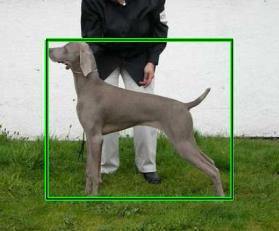
21 Top false positives: Dog (DPM) AP = Background 23% Localization 17% Other Objects 10% Similar Objects 50% Person, Cat, Horse Hoiem et al., ECCV 2012

22 Analysis of object characteristics Additional annotations for seven categories: occlusion level, parts visible, sides visible Hoiem et al., ECCV 2012
23 Object characteristics: Aeroplane Occlusion: poor robustness to occlusion, but little impact on overall performance Easier (None) Hoiem et al., ECCV 2012 Harder (Heavy)



24 Object characteristics: Aeroplane Size: strong preference for average to above average sized airplanes Large Medium X-Large Small X-Small Easier Hoiem et al., ECCV 2012 Harder
25 Object characteristics: Aeroplane Aspect Ratio: 2-3x better at detecting wide (side) views than tall views X-Wide Wide Medium X-Tall Tall Easier (Wide) Hoiem et al., ECCV 2012 Harder (Tall)
 Hoiem et al.")
26 Object characteristics: Aeroplane Sides/Parts: best performance = direct side view with all parts visible Easier (Side) Hoiem et al., ECCV 2012 Harder (Non-Side)
27 Conclusions Most errors that detectors make are reasonable Localization error and confusion with similar objects Misdetection of occluded or small objects Detectors have different sensitivity to different factors E.g. less sensitive to truncation than to size differences Code and annotations are available online Adapted from Hoiem et al., ECCV 2012
28 Today Review: Deformable part models How can we speed up detection? In what ways does detection fail? How can we visualize features and detections?
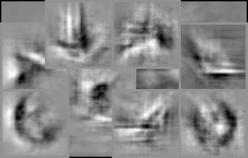
29 HOGgles: Visualizing Object Detection Features C. Vondrick, A. Khosla, T. Malisiewicz, and A. Torralba International Conference on Computer Vision (ICCV) 2013
30 Why did the detector fail? Car Vondrick et al., ICCV 2013

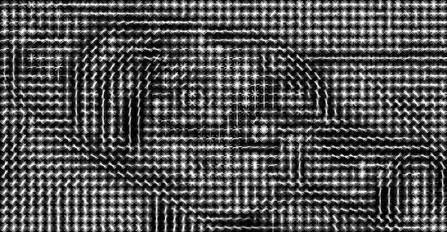
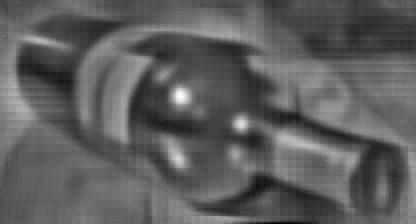
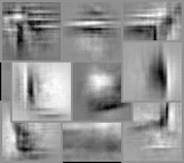
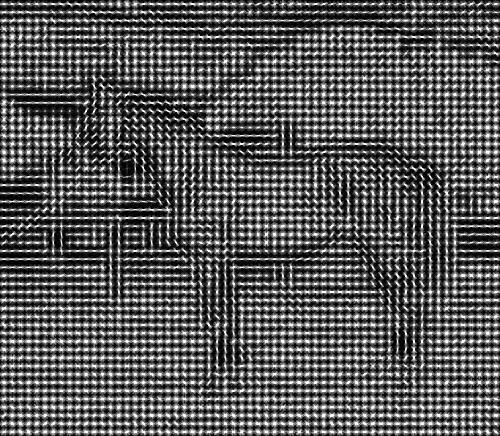
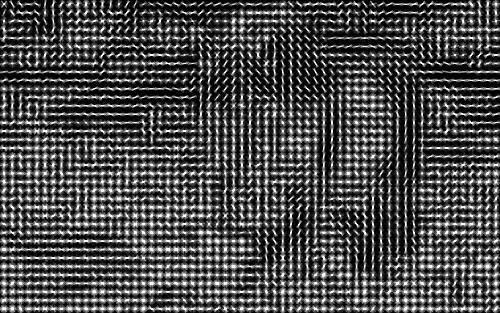
31 Vondrick et al., ICCV 2013 What information is lost?

32 Vondrick et al., ICCV 2013 What information is lost?
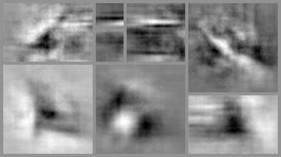
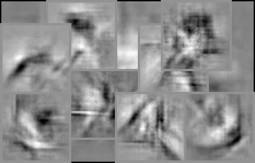
33 Recovering image from neighbors Image HOG Top detections Vondrick et al., ICCV 2013
34 Recovering image from neighbors Image HOG Top detections Vondrick et al., ICCV 2013


35 Recovering image from neighbors Image HOG Top detections Vondrick et al., ICCV 2013


36 Recovering image from neighbors Image HOG Top detections Vondrick et al., ICCV 2013

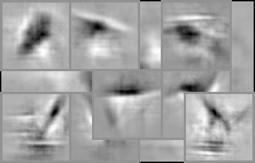
37 Better recovery using paired dictionary Vondrick et al., ICCV 2013


38 A microscope to view HOG 2x more intuitive Vondrick et al., ICCV 2013


39 vs Human Vision HOG Vision Vondrick et al., ICCV 2013

40 Vondrick et al., ICCV 2013
41 Vondrick et al., ICCV 2013

42 Vondrick et al., ICCV 2013
43 Vondrick et al., ICCV 2013


44 Vondrick et al., ICCV 2013
45 Vondrick et al., ICCV 2013
46 The HOGgles Challenge Humans detect & DPMs detect Vondrick et al., ICCV 2013
47 The HOGgles Challenge Humans miss & DPM miss Vondrick et al., ICCV 2013





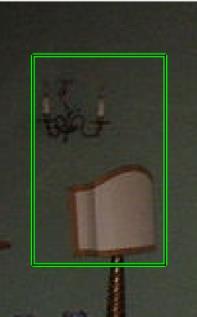
48 Vondrick et al., ICCV 2013 Chair Detections



49 Vondrick et al., ICCV 2013 Chair Detections
50 Vondrick et al., ICCV 2013 Car Detections








51 Vondrick et al., ICCV 2013 Car Detections
52 Precision HOG+Human Human performance with HOG is poor despite perfect learning Detector Chair Loss due to RGB -> HOG HOG+DPM HOG+Human RGB+Human Recall Vondrick et al., ICCV 2013
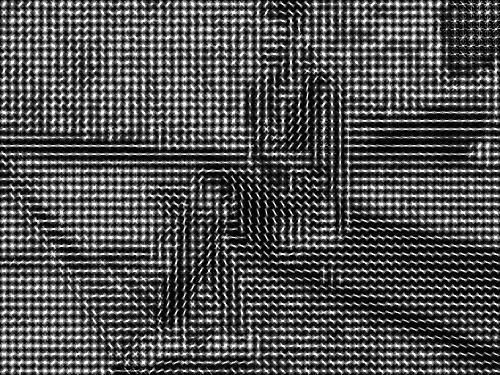
53 Why did the detector fail? Car Vondrick et al., ICCV 2013

54 Why did the detector fail? Car Vondrick et al., ICCV 2013

55 Why did the detector fail? Car Vondrick et al., ICCV 2013



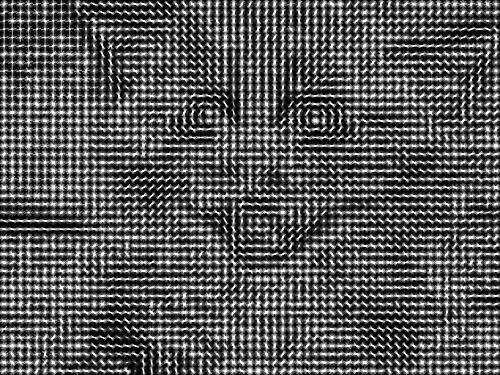
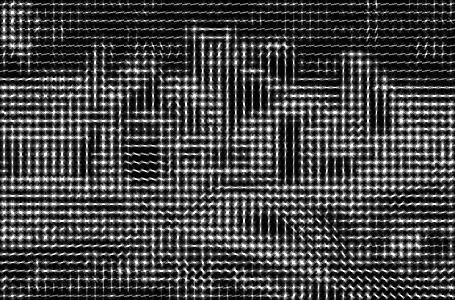
56 Visualizing Learned Models Car Person Bottle Bicycle Motorbike Chair TV Horse Vondrick et al., ICCV 2013


57 What is this?


58 What is this?


59 What is this?


60 What is this?


61 What is this?


62 What is this?
63 Summary We can speed up object detection by using the notion of objectness to prune windows unlikely to contain any object Some failure modes are more important than others and fixing them could increase the overall detection performance Even humans cannot produce correct classifications with imperfect features
Deformable Part Models
 CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
Diagnosing Error in Object Detectors
 Diagnosing Error in Object Detectors Derek Hoiem Yodsawalai Chodpathumwan Qieyun Dai (presented by Yuduo Wu) Most of the slides are from Derek Hoiem's ECCV 2012 presentation Object detecion is a collecion
Diagnosing Error in Object Detectors Derek Hoiem Yodsawalai Chodpathumwan Qieyun Dai (presented by Yuduo Wu) Most of the slides are from Derek Hoiem's ECCV 2012 presentation Object detecion is a collecion
Category-level localization
 Category-level localization Cordelia Schmid Recognition Classification Object present/absent in an image Often presence of a significant amount of background clutter Localization / Detection Localize object
Category-level localization Cordelia Schmid Recognition Classification Object present/absent in an image Often presence of a significant amount of background clutter Localization / Detection Localize object
Find that! Visual Object Detection Primer
 Find that! Visual Object Detection Primer SkTech/MIT Innovation Workshop August 16, 2012 Dr. Tomasz Malisiewicz tomasz@csail.mit.edu Find that! Your Goals...imagine one such system that drives information
Find that! Visual Object Detection Primer SkTech/MIT Innovation Workshop August 16, 2012 Dr. Tomasz Malisiewicz tomasz@csail.mit.edu Find that! Your Goals...imagine one such system that drives information
Object Category Detection. Slides mostly from Derek Hoiem
 Object Category Detection Slides mostly from Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical template matching with sliding window Part-based Models
Object Category Detection Slides mostly from Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical template matching with sliding window Part-based Models
Object Detection with Discriminatively Trained Part Based Models
 Object Detection with Discriminatively Trained Part Based Models Pedro F. Felzenszwelb, Ross B. Girshick, David McAllester and Deva Ramanan Presented by Fabricio Santolin da Silva Kaustav Basu Some slides
Object Detection with Discriminatively Trained Part Based Models Pedro F. Felzenszwelb, Ross B. Girshick, David McAllester and Deva Ramanan Presented by Fabricio Santolin da Silva Kaustav Basu Some slides
Category vs. instance recognition
 Category vs. instance recognition Category: Find all the people Find all the buildings Often within a single image Often sliding window Instance: Is this face James? Find this specific famous building
Category vs. instance recognition Category: Find all the people Find all the buildings Often within a single image Often sliding window Instance: Is this face James? Find this specific famous building
Object Category Detection: Sliding Windows
 04/10/12 Object Category Detection: Sliding Windows Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical
04/10/12 Object Category Detection: Sliding Windows Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical
CS 1674: Intro to Computer Vision. Object Recognition. Prof. Adriana Kovashka University of Pittsburgh April 3, 5, 2018
 CS 1674: Intro to Computer Vision Object Recognition Prof. Adriana Kovashka University of Pittsburgh April 3, 5, 2018 Different Flavors of Object Recognition Semantic Segmentation Classification + Localization
CS 1674: Intro to Computer Vision Object Recognition Prof. Adriana Kovashka University of Pittsburgh April 3, 5, 2018 Different Flavors of Object Recognition Semantic Segmentation Classification + Localization
 https://en.wikipedia.org/wiki/the_dress Recap: Viola-Jones sliding window detector Fast detection through two mechanisms Quickly eliminate unlikely windows Use features that are fast to compute Viola
https://en.wikipedia.org/wiki/the_dress Recap: Viola-Jones sliding window detector Fast detection through two mechanisms Quickly eliminate unlikely windows Use features that are fast to compute Viola
Part based models for recognition. Kristen Grauman
 Part based models for recognition Kristen Grauman UT Austin Limitations of window-based models Not all objects are box-shaped Assuming specific 2d view of object Local components themselves do not necessarily
Part based models for recognition Kristen Grauman UT Austin Limitations of window-based models Not all objects are box-shaped Assuming specific 2d view of object Local components themselves do not necessarily
Previously. Part-based and local feature models for generic object recognition. Bag-of-words model 4/20/2011
 Previously Part-based and local feature models for generic object recognition Wed, April 20 UT-Austin Discriminative classifiers Boosting Nearest neighbors Support vector machines Useful for object recognition
Previously Part-based and local feature models for generic object recognition Wed, April 20 UT-Austin Discriminative classifiers Boosting Nearest neighbors Support vector machines Useful for object recognition
Object Recognition and Detection
 CS 2770: Computer Vision Object Recognition and Detection Prof. Adriana Kovashka University of Pittsburgh March 16, 21, 23, 2017 Plan for the next few lectures Recognizing the category in the image as
CS 2770: Computer Vision Object Recognition and Detection Prof. Adriana Kovashka University of Pittsburgh March 16, 21, 23, 2017 Plan for the next few lectures Recognizing the category in the image as
Object Recognition II
 Object Recognition II Linda Shapiro EE/CSE 576 with CNN slides from Ross Girshick 1 Outline Object detection the task, evaluation, datasets Convolutional Neural Networks (CNNs) overview and history Region-based
Object Recognition II Linda Shapiro EE/CSE 576 with CNN slides from Ross Girshick 1 Outline Object detection the task, evaluation, datasets Convolutional Neural Networks (CNNs) overview and history Region-based
An Object Detection Algorithm based on Deformable Part Models with Bing Features Chunwei Li1, a and Youjun Bu1, b
 5th International Conference on Advanced Materials and Computer Science (ICAMCS 2016) An Object Detection Algorithm based on Deformable Part Models with Bing Features Chunwei Li1, a and Youjun Bu1, b 1
5th International Conference on Advanced Materials and Computer Science (ICAMCS 2016) An Object Detection Algorithm based on Deformable Part Models with Bing Features Chunwei Li1, a and Youjun Bu1, b 1
Object Detection by 3D Aspectlets and Occlusion Reasoning
 Object Detection by 3D Aspectlets and Occlusion Reasoning Yu Xiang University of Michigan Silvio Savarese Stanford University In the 4th International IEEE Workshop on 3D Representation and Recognition
Object Detection by 3D Aspectlets and Occlusion Reasoning Yu Xiang University of Michigan Silvio Savarese Stanford University In the 4th International IEEE Workshop on 3D Representation and Recognition
Category-level Localization
 Category-level Localization Andrew Zisserman Visual Geometry Group University of Oxford http://www.robots.ox.ac.uk/~vgg Includes slides from: Ondra Chum, Alyosha Efros, Mark Everingham, Pedro Felzenszwalb,
Category-level Localization Andrew Zisserman Visual Geometry Group University of Oxford http://www.robots.ox.ac.uk/~vgg Includes slides from: Ondra Chum, Alyosha Efros, Mark Everingham, Pedro Felzenszwalb,
Modern Object Detection. Most slides from Ali Farhadi
 Modern Object Detection Most slides from Ali Farhadi Comparison of Classifiers assuming x in {0 1} Learning Objective Training Inference Naïve Bayes maximize j i logp + logp ( x y ; θ ) ( y ; θ ) i ij
Modern Object Detection Most slides from Ali Farhadi Comparison of Classifiers assuming x in {0 1} Learning Objective Training Inference Naïve Bayes maximize j i logp + logp ( x y ; θ ) ( y ; θ ) i ij
Beyond bags of features: Adding spatial information. Many slides adapted from Fei-Fei Li, Rob Fergus, and Antonio Torralba
 Beyond bags of features: Adding spatial information Many slides adapted from Fei-Fei Li, Rob Fergus, and Antonio Torralba Adding spatial information Forming vocabularies from pairs of nearby features doublets
Beyond bags of features: Adding spatial information Many slides adapted from Fei-Fei Li, Rob Fergus, and Antonio Torralba Adding spatial information Forming vocabularies from pairs of nearby features doublets
Linear combinations of simple classifiers for the PASCAL challenge
 Linear combinations of simple classifiers for the PASCAL challenge Nik A. Melchior and David Lee 16 721 Advanced Perception The Robotics Institute Carnegie Mellon University Email: melchior@cmu.edu, dlee1@andrew.cmu.edu
Linear combinations of simple classifiers for the PASCAL challenge Nik A. Melchior and David Lee 16 721 Advanced Perception The Robotics Institute Carnegie Mellon University Email: melchior@cmu.edu, dlee1@andrew.cmu.edu
Part-Based Models for Object Class Recognition Part 3
 High Level Computer Vision! Part-Based Models for Object Class Recognition Part 3 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de! http://www.d2.mpi-inf.mpg.de/cv ! State-of-the-Art
High Level Computer Vision! Part-Based Models for Object Class Recognition Part 3 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de! http://www.d2.mpi-inf.mpg.de/cv ! State-of-the-Art
Part-based and local feature models for generic object recognition
 Part-based and local feature models for generic object recognition May 28 th, 2015 Yong Jae Lee UC Davis Announcements PS2 grades up on SmartSite PS2 stats: Mean: 80.15 Standard Dev: 22.77 Vote on piazza
Part-based and local feature models for generic object recognition May 28 th, 2015 Yong Jae Lee UC Davis Announcements PS2 grades up on SmartSite PS2 stats: Mean: 80.15 Standard Dev: 22.77 Vote on piazza
Beyond Bags of features Spatial information & Shape models
 Beyond Bags of features Spatial information & Shape models Jana Kosecka Many slides adapted from S. Lazebnik, FeiFei Li, Rob Fergus, and Antonio Torralba Detection, recognition (so far )! Bags of features
Beyond Bags of features Spatial information & Shape models Jana Kosecka Many slides adapted from S. Lazebnik, FeiFei Li, Rob Fergus, and Antonio Torralba Detection, recognition (so far )! Bags of features
Object Detection Design challenges
 Object Detection Design challenges How to efficiently search for likely objects Even simple models require searching hundreds of thousands of positions and scales Feature design and scoring How should
Object Detection Design challenges How to efficiently search for likely objects Even simple models require searching hundreds of thousands of positions and scales Feature design and scoring How should
Object Detection with Partial Occlusion Based on a Deformable Parts-Based Model
 Object Detection with Partial Occlusion Based on a Deformable Parts-Based Model Johnson Hsieh (johnsonhsieh@gmail.com), Alexander Chia (alexchia@stanford.edu) Abstract -- Object occlusion presents a major
Object Detection with Partial Occlusion Based on a Deformable Parts-Based Model Johnson Hsieh (johnsonhsieh@gmail.com), Alexander Chia (alexchia@stanford.edu) Abstract -- Object occlusion presents a major
Object detection. Announcements. Last time: Mid-level cues 2/23/2016. Wed Feb 24 Kristen Grauman UT Austin
 Object detection Wed Feb 24 Kristen Grauman UT Austin Announcements Reminder: Assignment 2 is due Mar 9 and Mar 10 Be ready to run your code again on a new test set on Mar 10 Vision talk next Tuesday 11
Object detection Wed Feb 24 Kristen Grauman UT Austin Announcements Reminder: Assignment 2 is due Mar 9 and Mar 10 Be ready to run your code again on a new test set on Mar 10 Vision talk next Tuesday 11
Development in Object Detection. Junyuan Lin May 4th
 Development in Object Detection Junyuan Lin May 4th Line of Research [1] N. Dalal and B. Triggs. Histograms of oriented gradients for human detection, CVPR 2005. HOG Feature template [2] P. Felzenszwalb,
Development in Object Detection Junyuan Lin May 4th Line of Research [1] N. Dalal and B. Triggs. Histograms of oriented gradients for human detection, CVPR 2005. HOG Feature template [2] P. Felzenszwalb,
Window based detectors
 Window based detectors CS 554 Computer Vision Pinar Duygulu Bilkent University (Source: James Hays, Brown) Today Window-based generic object detection basic pipeline boosting classifiers face detection
Window based detectors CS 554 Computer Vision Pinar Duygulu Bilkent University (Source: James Hays, Brown) Today Window-based generic object detection basic pipeline boosting classifiers face detection
Beyond Sliding Windows: Object Localization by Efficient Subwindow Search
 Beyond Sliding Windows: Object Localization by Efficient Subwindow Search Christoph H. Lampert, Matthew B. Blaschko, & Thomas Hofmann Max Planck Institute for Biological Cybernetics Tübingen, Germany Google,
Beyond Sliding Windows: Object Localization by Efficient Subwindow Search Christoph H. Lampert, Matthew B. Blaschko, & Thomas Hofmann Max Planck Institute for Biological Cybernetics Tübingen, Germany Google,
Recap Image Classification with Bags of Local Features
 Recap Image Classification with Bags of Local Features Bag of Feature models were the state of the art for image classification for a decade BoF may still be the state of the art for instance retrieval
Recap Image Classification with Bags of Local Features Bag of Feature models were the state of the art for image classification for a decade BoF may still be the state of the art for instance retrieval
Human detection using histogram of oriented gradients. Srikumar Ramalingam School of Computing University of Utah
 Human detection using histogram of oriented gradients Srikumar Ramalingam School of Computing University of Utah Reference Navneet Dalal and Bill Triggs, Histograms of Oriented Gradients for Human Detection,
Human detection using histogram of oriented gradients Srikumar Ramalingam School of Computing University of Utah Reference Navneet Dalal and Bill Triggs, Histograms of Oriented Gradients for Human Detection,
Using the Deformable Part Model with Autoencoded Feature Descriptors for Object Detection
 Using the Deformable Part Model with Autoencoded Feature Descriptors for Object Detection Hyunghoon Cho and David Wu December 10, 2010 1 Introduction Given its performance in recent years' PASCAL Visual
Using the Deformable Part Model with Autoencoded Feature Descriptors for Object Detection Hyunghoon Cho and David Wu December 10, 2010 1 Introduction Given its performance in recent years' PASCAL Visual
Supplementary Material: Pixelwise Instance Segmentation with a Dynamically Instantiated Network
 Supplementary Material: Pixelwise Instance Segmentation with a Dynamically Instantiated Network Anurag Arnab and Philip H.S. Torr University of Oxford {anurag.arnab, philip.torr}@eng.ox.ac.uk 1. Introduction
Supplementary Material: Pixelwise Instance Segmentation with a Dynamically Instantiated Network Anurag Arnab and Philip H.S. Torr University of Oxford {anurag.arnab, philip.torr}@eng.ox.ac.uk 1. Introduction
CS 1674: Intro to Computer Vision. Attributes. Prof. Adriana Kovashka University of Pittsburgh November 2, 2016
 CS 1674: Intro to Computer Vision Attributes Prof. Adriana Kovashka University of Pittsburgh November 2, 2016 Plan for today What are attributes and why are they useful? (paper 1) Attributes for zero-shot
CS 1674: Intro to Computer Vision Attributes Prof. Adriana Kovashka University of Pittsburgh November 2, 2016 Plan for today What are attributes and why are they useful? (paper 1) Attributes for zero-shot
Learning Collections of Part Models for Object Recognition
 Learning Collections of Part Models for Object Recognition Ian Endres, Kevin J. Shih, Johnston Jiaa, Derek Hoiem University of Illinois at Urbana-Champaign {iendres2,kjshih2,jiaa1,dhoiem}@illinois.edu
Learning Collections of Part Models for Object Recognition Ian Endres, Kevin J. Shih, Johnston Jiaa, Derek Hoiem University of Illinois at Urbana-Champaign {iendres2,kjshih2,jiaa1,dhoiem}@illinois.edu
Object Category Detection: Sliding Windows
 03/18/10 Object Category Detection: Sliding Windows Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Goal: Detect all instances of objects Influential Works in Detection Sung-Poggio
03/18/10 Object Category Detection: Sliding Windows Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Goal: Detect all instances of objects Influential Works in Detection Sung-Poggio
Attributes. Computer Vision. James Hays. Many slides from Derek Hoiem
 Many slides from Derek Hoiem Attributes Computer Vision James Hays Recap: Human Computation Active Learning: Let the classifier tell you where more annotation is needed. Human-in-the-loop recognition:
Many slides from Derek Hoiem Attributes Computer Vision James Hays Recap: Human Computation Active Learning: Let the classifier tell you where more annotation is needed. Human-in-the-loop recognition:
Colorado School of Mines. Computer Vision. Professor William Hoff Dept of Electrical Engineering &Computer Science.
 Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 People Detection Some material for these slides comes from www.cs.cornell.edu/courses/cs4670/2012fa/lectures/lec32_object_recognition.ppt
Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 People Detection Some material for these slides comes from www.cs.cornell.edu/courses/cs4670/2012fa/lectures/lec32_object_recognition.ppt
24 hours of Photo Sharing. installation by Erik Kessels
 24 hours of Photo Sharing installation by Erik Kessels And sometimes Internet photos have useful labels Im2gps. Hays and Efros. CVPR 2008 But what if we want more? Image Categorization Training Images
24 hours of Photo Sharing installation by Erik Kessels And sometimes Internet photos have useful labels Im2gps. Hays and Efros. CVPR 2008 But what if we want more? Image Categorization Training Images
Object Recognition with Deformable Models
 Object Recognition with Deformable Models Pedro F. Felzenszwalb Department of Computer Science University of Chicago Joint work with: Dan Huttenlocher, Joshua Schwartz, David McAllester, Deva Ramanan.
Object Recognition with Deformable Models Pedro F. Felzenszwalb Department of Computer Science University of Chicago Joint work with: Dan Huttenlocher, Joshua Schwartz, David McAllester, Deva Ramanan.
A Discriminatively Trained, Multiscale, Deformable Part Model
 A Discriminatively Trained, Multiscale, Deformable Part Model by Pedro Felzenszwalb, David McAllester, and Deva Ramanan CS381V Visual Recognition - Paper Presentation Slide credit: Duan Tran Slide credit:
A Discriminatively Trained, Multiscale, Deformable Part Model by Pedro Felzenszwalb, David McAllester, and Deva Ramanan CS381V Visual Recognition - Paper Presentation Slide credit: Duan Tran Slide credit:
Object Recognition. Computer Vision. Slides from Lana Lazebnik, Fei-Fei Li, Rob Fergus, Antonio Torralba, and Jean Ponce
 Object Recognition Computer Vision Slides from Lana Lazebnik, Fei-Fei Li, Rob Fergus, Antonio Torralba, and Jean Ponce How many visual object categories are there? Biederman 1987 ANIMALS PLANTS OBJECTS
Object Recognition Computer Vision Slides from Lana Lazebnik, Fei-Fei Li, Rob Fergus, Antonio Torralba, and Jean Ponce How many visual object categories are there? Biederman 1987 ANIMALS PLANTS OBJECTS
Computer Vision: Summary and Discussion
 12/05/2011 Computer Vision: Summary and Discussion Computer Vision CS 143, Brown James Hays Many slides from Derek Hoiem Announcements Today is last day of regular class Second quiz on Wednesday (Dec 7
12/05/2011 Computer Vision: Summary and Discussion Computer Vision CS 143, Brown James Hays Many slides from Derek Hoiem Announcements Today is last day of regular class Second quiz on Wednesday (Dec 7
Comparison of Object Detection Algorithms on Maritime Vessels Mark Chua 1, David W. Aha 2, Bryan Auslander 3, Kalyan Gupta 3, and Brendan Morris 1
 Comparison of Object Detection Algorithms on Maritime Vessels Mark Chua 1, David W. Aha 2, Bryan Auslander 3, Kalyan Gupta 3, and Brendan Morris 1 1 Department of Electrical and Computer Engineering; University
Comparison of Object Detection Algorithms on Maritime Vessels Mark Chua 1, David W. Aha 2, Bryan Auslander 3, Kalyan Gupta 3, and Brendan Morris 1 1 Department of Electrical and Computer Engineering; University
Lecture 15: Detecting Objects by Parts
 Lecture 15: Detecting Objects by Parts David R. Morales, Austin O. Narcomey, Minh-An Quinn, Guilherme Reis, Omar Solis Department of Computer Science Stanford University Stanford, CA 94305 {mrlsdvd, aon2,
Lecture 15: Detecting Objects by Parts David R. Morales, Austin O. Narcomey, Minh-An Quinn, Guilherme Reis, Omar Solis Department of Computer Science Stanford University Stanford, CA 94305 {mrlsdvd, aon2,
Immediate, scalable object category detection
 Immediate, scalable object category detection Yusuf Aytar Andrew Zisserman Visual Geometry Group, Department of Engineering Science, University of Oxford Abstract The objective of this work is object category
Immediate, scalable object category detection Yusuf Aytar Andrew Zisserman Visual Geometry Group, Department of Engineering Science, University of Oxford Abstract The objective of this work is object category
Histograms of Oriented Gradients
 Histograms of Oriented Gradients Carlo Tomasi September 18, 2017 A useful question to ask of an image is whether it contains one or more instances of a certain object: a person, a face, a car, and so forth.
Histograms of Oriented Gradients Carlo Tomasi September 18, 2017 A useful question to ask of an image is whether it contains one or more instances of a certain object: a person, a face, a car, and so forth.
HOGgles: Visualizing Object Detection Features
 203 IEEE International Conference on Computer Vision HOGgles: Visualizing Object Detection Features Carl Vondrick, Aditya Khosla, Tomasz Malisiewicz, Antonio Torralba Massachusetts Institute of Technology
203 IEEE International Conference on Computer Vision HOGgles: Visualizing Object Detection Features Carl Vondrick, Aditya Khosla, Tomasz Malisiewicz, Antonio Torralba Massachusetts Institute of Technology
c 2011 by Pedro Moises Crisostomo Romero. All rights reserved.
 c 2011 by Pedro Moises Crisostomo Romero. All rights reserved. HAND DETECTION ON IMAGES BASED ON DEFORMABLE PART MODELS AND ADDITIONAL FEATURES BY PEDRO MOISES CRISOSTOMO ROMERO THESIS Submitted in partial
c 2011 by Pedro Moises Crisostomo Romero. All rights reserved. HAND DETECTION ON IMAGES BASED ON DEFORMABLE PART MODELS AND ADDITIONAL FEATURES BY PEDRO MOISES CRISOSTOMO ROMERO THESIS Submitted in partial
Bias-Variance Trade-off (cont d) + Image Representations
 + Image Representations") CS 275: Machine Learning Bias-Variance Trade-off (cont d) + Image Representations Prof. Adriana Kovashka University of Pittsburgh January 2, 26 Announcement Homework now due Feb. Generalization Training
CS 275: Machine Learning Bias-Variance Trade-off (cont d) + Image Representations Prof. Adriana Kovashka University of Pittsburgh January 2, 26 Announcement Homework now due Feb. Generalization Training
Semantic Pooling for Image Categorization using Multiple Kernel Learning
 Semantic Pooling for Image Categorization using Multiple Kernel Learning Thibaut Durand (1,2), Nicolas Thome (1), Matthieu Cord (1), David Picard (2) (1) Sorbonne Universités, UPMC Univ Paris 06, UMR 7606,
Semantic Pooling for Image Categorization using Multiple Kernel Learning Thibaut Durand (1,2), Nicolas Thome (1), Matthieu Cord (1), David Picard (2) (1) Sorbonne Universités, UPMC Univ Paris 06, UMR 7606,
Learning Spatial Context: Using Stuff to Find Things
 Learning Spatial Context: Using Stuff to Find Things Wei-Cheng Su Motivation 2 Leverage contextual information to enhance detection Some context objects are non-rigid and are more naturally classified
Learning Spatial Context: Using Stuff to Find Things Wei-Cheng Su Motivation 2 Leverage contextual information to enhance detection Some context objects are non-rigid and are more naturally classified
Bag-of-features. Cordelia Schmid
 Bag-of-features for category classification Cordelia Schmid Visual search Particular objects and scenes, large databases Category recognition Image classification: assigning a class label to the image
Bag-of-features for category classification Cordelia Schmid Visual search Particular objects and scenes, large databases Category recognition Image classification: assigning a class label to the image
Object Detection Based on Deep Learning
 Object Detection Based on Deep Learning Yurii Pashchenko AI Ukraine 2016, Kharkiv, 2016 Image classification (mostly what you ve seen) http://tutorial.caffe.berkeleyvision.org/caffe-cvpr15-detection.pdf
Object Detection Based on Deep Learning Yurii Pashchenko AI Ukraine 2016, Kharkiv, 2016 Image classification (mostly what you ve seen) http://tutorial.caffe.berkeleyvision.org/caffe-cvpr15-detection.pdf
Detection and Localization with Multi-scale Models
 Detection and Localization with Multi-scale Models Eshed Ohn-Bar and Mohan M. Trivedi Computer Vision and Robotics Research Laboratory University of California San Diego {eohnbar, mtrivedi}@ucsd.edu Abstract
Detection and Localization with Multi-scale Models Eshed Ohn-Bar and Mohan M. Trivedi Computer Vision and Robotics Research Laboratory University of California San Diego {eohnbar, mtrivedi}@ucsd.edu Abstract
Segmentation and Grouping
 CS 1699: Intro to Computer Vision Segmentation and Grouping Prof. Adriana Kovashka University of Pittsburgh September 24, 2015 Goals: Grouping in vision Gather features that belong together Obtain an intermediate
CS 1699: Intro to Computer Vision Segmentation and Grouping Prof. Adriana Kovashka University of Pittsburgh September 24, 2015 Goals: Grouping in vision Gather features that belong together Obtain an intermediate
Analysis: TextonBoost and Semantic Texton Forests. Daniel Munoz Februrary 9, 2009
 Analysis: TextonBoost and Semantic Texton Forests Daniel Munoz 16-721 Februrary 9, 2009 Papers [shotton-eccv-06] J. Shotton, J. Winn, C. Rother, A. Criminisi, TextonBoost: Joint Appearance, Shape and Context
Analysis: TextonBoost and Semantic Texton Forests Daniel Munoz 16-721 Februrary 9, 2009 Papers [shotton-eccv-06] J. Shotton, J. Winn, C. Rother, A. Criminisi, TextonBoost: Joint Appearance, Shape and Context
Modeling 3D viewpoint for part-based object recognition of rigid objects
 Modeling 3D viewpoint for part-based object recognition of rigid objects Joshua Schwartz Department of Computer Science Cornell University jdvs@cs.cornell.edu Abstract Part-based object models based on
Modeling 3D viewpoint for part-based object recognition of rigid objects Joshua Schwartz Department of Computer Science Cornell University jdvs@cs.cornell.edu Abstract Part-based object models based on
Large-Scale Live Active Learning: Training Object Detectors with Crawled Data and Crowds
 Large-Scale Live Active Learning: Training Object Detectors with Crawled Data and Crowds Sudheendra Vijayanarasimhan Kristen Grauman Department of Computer Science University of Texas at Austin Austin,
Large-Scale Live Active Learning: Training Object Detectors with Crawled Data and Crowds Sudheendra Vijayanarasimhan Kristen Grauman Department of Computer Science University of Texas at Austin Austin,
Fast, Accurate Detection of 100,000 Object Classes on a Single Machine
 Fast, Accurate Detection of 100,000 Object Classes on a Single Machine Thomas Dean etal. Google, Mountain View, CA CVPR 2013 best paper award Presented by: Zhenhua Wang 2013.12.10 Outline Background This
Fast, Accurate Detection of 100,000 Object Classes on a Single Machine Thomas Dean etal. Google, Mountain View, CA CVPR 2013 best paper award Presented by: Zhenhua Wang 2013.12.10 Outline Background This
Segmenting Objects in Weakly Labeled Videos
 Segmenting Objects in Weakly Labeled Videos Mrigank Rochan, Shafin Rahman, Neil D.B. Bruce, Yang Wang Department of Computer Science University of Manitoba Winnipeg, Canada {mrochan, shafin12, bruce, ywang}@cs.umanitoba.ca
Segmenting Objects in Weakly Labeled Videos Mrigank Rochan, Shafin Rahman, Neil D.B. Bruce, Yang Wang Department of Computer Science University of Manitoba Winnipeg, Canada {mrochan, shafin12, bruce, ywang}@cs.umanitoba.ca
Part-Based Models for Object Class Recognition Part 2
 High Level Computer Vision Part-Based Models for Object Class Recognition Part 2 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de https://www.mpi-inf.mpg.de/hlcv Class of Object
High Level Computer Vision Part-Based Models for Object Class Recognition Part 2 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de https://www.mpi-inf.mpg.de/hlcv Class of Object
Part-Based Models for Object Class Recognition Part 2
 High Level Computer Vision Part-Based Models for Object Class Recognition Part 2 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de https://www.mpi-inf.mpg.de/hlcv Class of Object
High Level Computer Vision Part-Based Models for Object Class Recognition Part 2 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de https://www.mpi-inf.mpg.de/hlcv Class of Object
Object Detection with YOLO on Artwork Dataset
 Object Detection with YOLO on Artwork Dataset Yihui He Computer Science Department, Xi an Jiaotong University heyihui@stu.xjtu.edu.cn Abstract Person: 0.64 Horse: 0.28 I design a small object detection
Object Detection with YOLO on Artwork Dataset Yihui He Computer Science Department, Xi an Jiaotong University heyihui@stu.xjtu.edu.cn Abstract Person: 0.64 Horse: 0.28 I design a small object detection
Object Detection. Computer Vision Yuliang Zou, Virginia Tech. Many slides from D. Hoiem, J. Hays, J. Johnson, R. Girshick
 Object Detection Computer Vision Yuliang Zou, Virginia Tech Many slides from D. Hoiem, J. Hays, J. Johnson, R. Girshick Administrative stuffs HW 4 due 11:59pm on Wed, November 8 HW 3 grades are out Average:
Object Detection Computer Vision Yuliang Zou, Virginia Tech Many slides from D. Hoiem, J. Hays, J. Johnson, R. Girshick Administrative stuffs HW 4 due 11:59pm on Wed, November 8 HW 3 grades are out Average:
DPM Score Regressor for Detecting Occluded Humans from Depth Images
 DPM Score Regressor for Detecting Occluded Humans from Depth Images Tsuyoshi Usami, Hiroshi Fukui, Yuji Yamauchi, Takayoshi Yamashita and Hironobu Fujiyoshi Email: usami915@vision.cs.chubu.ac.jp Email:
DPM Score Regressor for Detecting Occluded Humans from Depth Images Tsuyoshi Usami, Hiroshi Fukui, Yuji Yamauchi, Takayoshi Yamashita and Hironobu Fujiyoshi Email: usami915@vision.cs.chubu.ac.jp Email:
Detecting Object Instances Without Discriminative Features
 Detecting Object Instances Without Discriminative Features Edward Hsiao June 19, 2013 Thesis Committee: Martial Hebert, Chair Alexei Efros Takeo Kanade Andrew Zisserman, University of Oxford 1 Object Instance
Detecting Object Instances Without Discriminative Features Edward Hsiao June 19, 2013 Thesis Committee: Martial Hebert, Chair Alexei Efros Takeo Kanade Andrew Zisserman, University of Oxford 1 Object Instance
Learning Representations for Visual Object Class Recognition
 Learning Representations for Visual Object Class Recognition Marcin Marszałek Cordelia Schmid Hedi Harzallah Joost van de Weijer LEAR, INRIA Grenoble, Rhône-Alpes, France October 15th, 2007 Bag-of-Features
Learning Representations for Visual Object Class Recognition Marcin Marszałek Cordelia Schmid Hedi Harzallah Joost van de Weijer LEAR, INRIA Grenoble, Rhône-Alpes, France October 15th, 2007 Bag-of-Features
Detecting Objects using Deformation Dictionaries
 Detecting Objects using Deformation Dictionaries Bharath Hariharan UC Berkeley bharath2@eecs.berkeley.edu C. Lawrence Zitnick Microsoft Research larryz@microsoft.com Piotr Dollár Microsoft Research pdollar@microsoft.com
Detecting Objects using Deformation Dictionaries Bharath Hariharan UC Berkeley bharath2@eecs.berkeley.edu C. Lawrence Zitnick Microsoft Research larryz@microsoft.com Piotr Dollár Microsoft Research pdollar@microsoft.com
LEARNING TO GENERATE CHAIRS WITH CONVOLUTIONAL NEURAL NETWORKS
 LEARNING TO GENERATE CHAIRS WITH CONVOLUTIONAL NEURAL NETWORKS Alexey Dosovitskiy, Jost Tobias Springenberg and Thomas Brox University of Freiburg Presented by: Shreyansh Daftry Visual Learning and Recognition
LEARNING TO GENERATE CHAIRS WITH CONVOLUTIONAL NEURAL NETWORKS Alexey Dosovitskiy, Jost Tobias Springenberg and Thomas Brox University of Freiburg Presented by: Shreyansh Daftry Visual Learning and Recognition
Deformable Part Models with Individual Part Scaling
 DUBOUT, FLEURET: DEFORMABLE PART MODELS WITH INDIVIDUAL PART SCALING 1 Deformable Part Models with Individual Part Scaling Charles Dubout charles.dubout@idiap.ch François Fleuret francois.fleuret@idiap.ch
DUBOUT, FLEURET: DEFORMABLE PART MODELS WITH INDIVIDUAL PART SCALING 1 Deformable Part Models with Individual Part Scaling Charles Dubout charles.dubout@idiap.ch François Fleuret francois.fleuret@idiap.ch
Previously. Window-based models for generic object detection 4/11/2011
 Previously for generic object detection Monday, April 11 UT-Austin Instance recognition Local features: detection and description Local feature matching, scalable indexing Spatial verification Intro to
Previously for generic object detection Monday, April 11 UT-Austin Instance recognition Local features: detection and description Local feature matching, scalable indexing Spatial verification Intro to
Selective Search for Object Recognition
 Selective Search for Object Recognition Uijlings et al. Schuyler Smith Overview Introduction Object Recognition Selective Search Similarity Metrics Results Object Recognition Kitten Goal: Problem: Where
Selective Search for Object Recognition Uijlings et al. Schuyler Smith Overview Introduction Object Recognition Selective Search Similarity Metrics Results Object Recognition Kitten Goal: Problem: Where
Multiple-Person Tracking by Detection
 http://excel.fit.vutbr.cz Multiple-Person Tracking by Detection Jakub Vojvoda* Abstract Detection and tracking of multiple person is challenging problem mainly due to complexity of scene and large intra-class
http://excel.fit.vutbr.cz Multiple-Person Tracking by Detection Jakub Vojvoda* Abstract Detection and tracking of multiple person is challenging problem mainly due to complexity of scene and large intra-class
Structured Models in. Dan Huttenlocher. June 2010
 Structured Models in Computer Vision i Dan Huttenlocher June 2010 Structured Models Problems where output variables are mutually dependent or constrained E.g., spatial or temporal relations Such dependencies
Structured Models in Computer Vision i Dan Huttenlocher June 2010 Structured Models Problems where output variables are mutually dependent or constrained E.g., spatial or temporal relations Such dependencies
Segmentation as Selective Search for Object Recognition in ILSVRC2011
 Segmentation as Selective Search for Object Recognition in ILSVRC2011 Koen van de Sande Jasper Uijlings Arnold Smeulders Theo Gevers Nicu Sebe Cees Snoek University of Amsterdam, University of Trento ILSVRC2011
Segmentation as Selective Search for Object Recognition in ILSVRC2011 Koen van de Sande Jasper Uijlings Arnold Smeulders Theo Gevers Nicu Sebe Cees Snoek University of Amsterdam, University of Trento ILSVRC2011
Object Detection. Sanja Fidler CSC420: Intro to Image Understanding 1/ 1
 Object Detection Sanja Fidler CSC420: Intro to Image Understanding 1/ 1 Object Detection The goal of object detection is to localize objects in an image and tell their class Localization: place a tight
Object Detection Sanja Fidler CSC420: Intro to Image Understanding 1/ 1 Object Detection The goal of object detection is to localize objects in an image and tell their class Localization: place a tight
Deep condolence to Professor Mark Everingham
 Deep condolence to Professor Mark Everingham Towards VOC2012 Object Classification Challenge Generalized Hierarchical Matching for Sub-category Aware Object Classification National University of Singapore
Deep condolence to Professor Mark Everingham Towards VOC2012 Object Classification Challenge Generalized Hierarchical Matching for Sub-category Aware Object Classification National University of Singapore
Lecture 16: Object recognition: Part-based generative models
 Lecture 16: Object recognition: Part-based generative models Professor Stanford Vision Lab 1 What we will learn today? Introduction Constellation model Weakly supervised training One-shot learning (Problem
Lecture 16: Object recognition: Part-based generative models Professor Stanford Vision Lab 1 What we will learn today? Introduction Constellation model Weakly supervised training One-shot learning (Problem
Training Deformable Object Models for Human Detection based on Alignment and Clustering
 Training Deformable Object Models for Human Detection based on Alignment and Clustering Benjamin Drayer and Thomas Brox Department of Computer Science, Centre of Biological Signalling Studies (BIOSS),
Training Deformable Object Models for Human Detection based on Alignment and Clustering Benjamin Drayer and Thomas Brox Department of Computer Science, Centre of Biological Signalling Studies (BIOSS),
Finding Tiny Faces Supplementary Materials
 Finding Tiny Faces Supplementary Materials Peiyun Hu, Deva Ramanan Robotics Institute Carnegie Mellon University {peiyunh,deva}@cs.cmu.edu 1. Error analysis Quantitative analysis We plot the distribution
Finding Tiny Faces Supplementary Materials Peiyun Hu, Deva Ramanan Robotics Institute Carnegie Mellon University {peiyunh,deva}@cs.cmu.edu 1. Error analysis Quantitative analysis We plot the distribution
Ranking Figure-Ground Hypotheses for Object Segmentation
 Ranking Figure-Ground Hypotheses for Object Segmentation João Carreira, Fuxin Li, Cristian Sminchisescu Faculty of Mathematics and Natural Science, INS, University of Bonn http://sminchisescu.ins.uni-bonn.de/
Ranking Figure-Ground Hypotheses for Object Segmentation João Carreira, Fuxin Li, Cristian Sminchisescu Faculty of Mathematics and Natural Science, INS, University of Bonn http://sminchisescu.ins.uni-bonn.de/
Apprenticeship Learning: Transfer of Knowledge via Dataset Augmentation
 Apprenticeship Learning: Transfer of Knowledge via Dataset Augmentation Miroslav Kobetski and Josephine Sullivan Computer Vision and Active Perception, KTH, 114 28 Stockholm kobetski@kth.se, sullivan@nada.kth.se
Apprenticeship Learning: Transfer of Knowledge via Dataset Augmentation Miroslav Kobetski and Josephine Sullivan Computer Vision and Active Perception, KTH, 114 28 Stockholm kobetski@kth.se, sullivan@nada.kth.se
Hierarchical Learning for Object Detection. Long Zhu, Yuanhao Chen, William Freeman, Alan Yuille, Antonio Torralba MIT and UCLA, 2010
 Hierarchical Learning for Object Detection Long Zhu, Yuanhao Chen, William Freeman, Alan Yuille, Antonio Torralba MIT and UCLA, 2010 Background I: Our prior work Our work for the Pascal Challenge is based
Hierarchical Learning for Object Detection Long Zhu, Yuanhao Chen, William Freeman, Alan Yuille, Antonio Torralba MIT and UCLA, 2010 Background I: Our prior work Our work for the Pascal Challenge is based
Feature descriptors. Alain Pagani Prof. Didier Stricker. Computer Vision: Object and People Tracking
 Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Every Picture Tells a Story: Generating Sentences from Images
 Every Picture Tells a Story: Generating Sentences from Images Ali Farhadi, Mohsen Hejrati, Mohammad Amin Sadeghi, Peter Young, Cyrus Rashtchian, Julia Hockenmaier, David Forsyth University of Illinois
Every Picture Tells a Story: Generating Sentences from Images Ali Farhadi, Mohsen Hejrati, Mohammad Amin Sadeghi, Peter Young, Cyrus Rashtchian, Julia Hockenmaier, David Forsyth University of Illinois
Three-Dimensional Object Detection and Layout Prediction using Clouds of Oriented Gradients
 ThreeDimensional Object Detection and Layout Prediction using Clouds of Oriented Gradients Authors: Zhile Ren, Erik B. Sudderth Presented by: Shannon Kao, Max Wang October 19, 2016 Introduction Given an
ThreeDimensional Object Detection and Layout Prediction using Clouds of Oriented Gradients Authors: Zhile Ren, Erik B. Sudderth Presented by: Shannon Kao, Max Wang October 19, 2016 Introduction Given an
Learning Realistic Human Actions from Movies
 Learning Realistic Human Actions from Movies Ivan Laptev*, Marcin Marszałek**, Cordelia Schmid**, Benjamin Rozenfeld*** INRIA Rennes, France ** INRIA Grenoble, France *** Bar-Ilan University, Israel Presented
Learning Realistic Human Actions from Movies Ivan Laptev*, Marcin Marszałek**, Cordelia Schmid**, Benjamin Rozenfeld*** INRIA Rennes, France ** INRIA Grenoble, France *** Bar-Ilan University, Israel Presented
Seeing 3D chairs: Exemplar part-based 2D-3D alignment using a large dataset of CAD models
 Seeing 3D chairs: Exemplar part-based 2D-3D alignment using a large dataset of CAD models Mathieu Aubry (INRIA) Daniel Maturana (CMU) Alexei Efros (UC Berkeley) Bryan Russell (Intel) Josef Sivic (INRIA)
Seeing 3D chairs: Exemplar part-based 2D-3D alignment using a large dataset of CAD models Mathieu Aubry (INRIA) Daniel Maturana (CMU) Alexei Efros (UC Berkeley) Bryan Russell (Intel) Josef Sivic (INRIA)
Indexing Ensembles of Exemplar-SVMs with Rejecting Taxonomies for Fast Evaluation
 Indexing Ensembles of Exemplar-SVMs with Rejecting Taxonomies for Fast Evaluation Federico Becattini Lorenzo Seidenari Alberto Del Bimbo University of Florence federico.becattini@unifi.it University of
Indexing Ensembles of Exemplar-SVMs with Rejecting Taxonomies for Fast Evaluation Federico Becattini Lorenzo Seidenari Alberto Del Bimbo University of Florence federico.becattini@unifi.it University of
High Level Computer Vision
 High Level Computer Vision Part-Based Models for Object Class Recognition Part 2 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de http://www.d2.mpi-inf.mpg.de/cv Please Note No
High Level Computer Vision Part-Based Models for Object Class Recognition Part 2 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de http://www.d2.mpi-inf.mpg.de/cv Please Note No
Part-based models. Lecture 10
 Part-based models Lecture 10 Overview Representation Location Appearance Generative interpretation Learning Distance transforms Other approaches using parts Felzenszwalb, Girshick, McAllester, Ramanan
Part-based models Lecture 10 Overview Representation Location Appearance Generative interpretation Learning Distance transforms Other approaches using parts Felzenszwalb, Girshick, McAllester, Ramanan
Fitting: The Hough transform
 Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
Selection of Scale-Invariant Parts for Object Class Recognition
 Selection of Scale-Invariant Parts for Object Class Recognition Gy. Dorkó and C. Schmid INRIA Rhône-Alpes, GRAVIR-CNRS 655, av. de l Europe, 3833 Montbonnot, France fdorko,schmidg@inrialpes.fr Abstract
Selection of Scale-Invariant Parts for Object Class Recognition Gy. Dorkó and C. Schmid INRIA Rhône-Alpes, GRAVIR-CNRS 655, av. de l Europe, 3833 Montbonnot, France fdorko,schmidg@inrialpes.fr Abstract
Accurate Object Detection with Location Relaxation and Regionlets Re-localization
 Accurate Object Detection with Location Relaxation and Regionlets Re-localization Chengjiang Long 1, Xiaoyu Wang 2, Gang Hua 1, Ming Yang 3, and Yuanqing Lin 2 1 Stevens Institute of Technology, Hoboken,
Accurate Object Detection with Location Relaxation and Regionlets Re-localization Chengjiang Long 1, Xiaoyu Wang 2, Gang Hua 1, Ming Yang 3, and Yuanqing Lin 2 1 Stevens Institute of Technology, Hoboken,
Pedestrian Detection Using Structured SVM
 Pedestrian Detection Using Structured SVM Wonhui Kim Stanford University Department of Electrical Engineering wonhui@stanford.edu Seungmin Lee Stanford University Department of Electrical Engineering smlee729@stanford.edu.
Pedestrian Detection Using Structured SVM Wonhui Kim Stanford University Department of Electrical Engineering wonhui@stanford.edu Seungmin Lee Stanford University Department of Electrical Engineering smlee729@stanford.edu.
Segmentation. Bottom up Segmentation Semantic Segmentation
 Segmentation Bottom up Segmentation Semantic Segmentation Semantic Labeling of Street Scenes Ground Truth Labels 11 classes, almost all occur simultaneously, large changes in viewpoint, scale sky, road,
Segmentation Bottom up Segmentation Semantic Segmentation Semantic Labeling of Street Scenes Ground Truth Labels 11 classes, almost all occur simultaneously, large changes in viewpoint, scale sky, road,
HISTOGRAMS OF ORIENTATIO N GRADIENTS
 HISTOGRAMS OF ORIENTATIO N GRADIENTS Histograms of Orientation Gradients Objective: object recognition Basic idea Local shape information often well described by the distribution of intensity gradients
HISTOGRAMS OF ORIENTATIO N GRADIENTS Histograms of Orientation Gradients Objective: object recognition Basic idea Local shape information often well described by the distribution of intensity gradients
Deformable Part Models Revisited: A Performance Evaluation for Object Category Pose Estimation
 Deformable Part Models Revisited: A Performance Evaluation for Object Category Pose Estimation Roberto J. Lo pez-sastre Tinne Tuytelaars2 Silvio Savarese3 GRAM, Dept. Signal Theory and Communications,
Deformable Part Models Revisited: A Performance Evaluation for Object Category Pose Estimation Roberto J. Lo pez-sastre Tinne Tuytelaars2 Silvio Savarese3 GRAM, Dept. Signal Theory and Communications,
Visuelle Perzeption für Mensch- Maschine Schnittstellen
 Visuelle Perzeption für Mensch- Maschine Schnittstellen Vorlesung, WS 2009 Prof. Dr. Rainer Stiefelhagen Dr. Edgar Seemann Institut für Anthropomatik Universität Karlsruhe (TH) http://cvhci.ira.uka.de
Visuelle Perzeption für Mensch- Maschine Schnittstellen Vorlesung, WS 2009 Prof. Dr. Rainer Stiefelhagen Dr. Edgar Seemann Institut für Anthropomatik Universität Karlsruhe (TH) http://cvhci.ira.uka.de