Multi-Person Pose Estimation with Local Joint-to-Person Associations
|
|
|
- Barry Dawson
- 5 years ago
- Views:
Transcription
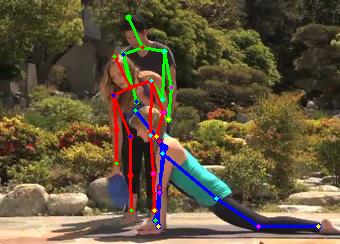
1 Multi-Person Pose Estimation with Local Joint-to-Person Associations Umar Iqbal and Juergen Gall omputer Vision Group University of Bonn, Germany Abstract. Despite of the recent success of neural networks for human pose estimation, current approaches are limited to pose estimation of a single person and cannot handle humans in groups or crowds. In this work, we propose a method that estimates the poses of multiple persons in an image in which a person can be occluded by another person or might be truncated. To this end, we consider multiperson pose estimation as a joint-to-person association problem. We construct a fully connected graph from a set of detected joint candidates in an image and resolve the joint-to-person association and outlier detection using integer linear programming. Since solving joint-to-person association jointly for all persons in an image is an NP-hard problem and even approximations are expensive, we solve the problem locally for each person. On the challenging MPII Human Pose Dataset for multiple persons, our approach achieves the accuracy of a state-of-the-art method, but it is 6,000 to 19,000 times faster. 1 Introduction Single person pose estimation has made a remarkable progress over the past few years. This is mainly due to the availability of deep learning based methods for detecting joints [1 5]. While earlier approaches in this direction [4,6,7] combine the body part detectors with tree structured graphical models, more recent methods [1 3,8 10] demonstrate that spatial relations between joints can be directly learned by a neural network without the need of an additional graphical model. These approaches, however, assume that only a single person is visible in the image and the location of the person is known a-priori. Moreover, the number of parts are defined by the network, e.g., full body or upper body, and cannot be changed. For realistic scenarios such assumptions are too strong and the methods cannot be applied to images that contain a number of overlapping and truncated persons. An example of such a scenario is shown in Figure 1. In comparison to single person human pose estimation benchmarks, multi-person pose estimation introduces new challenges. The number of persons in an image is unknown and needs to be correctly estimated, the persons occlude each other and might be truncated, and the joints need to be associated to the correct person. The simplest approach to tackle this problem is to first use a person detector and then estimate the pose for each detection independently [11 13]. This, however, does not resolve the joint association problem of two persons next to each other or truncations. Other approaches estimate the pose of all detected persons jointly [14, 15]. In [] a person detector is not
![Umar Iqbal and Juergen Gall Fig. 1: Example image from the multi-person subset of the MPII Pose Dataset [16]. required. Instead body part proposals are generated and connected in a large graph.](/docs-images/94/120550167/images/2-0.jpg "The approach then solves the labeling problem, the joint-to-person association problem and non-maximum suppression jointly.")
![While the model proposed in [] can be solved by integer linear programming and achieves state-of-the-art results on a very small subset of the MPII Human Pose Dataset, the complexity makes it](/docs-images/94/120550167/images/2-1.jpg "infeasible for a practical application. As reported in [5], the processing of a single image takes about 7 hours.")
![In this work, we address the joint-to-person association problem using a densely connected graphical model as in [], but propose to solve it only locally.](/docs-images/94/120550167/images/2-2.jpg "To this end, we first use a person detector and crop image regions as illustrated in Figure 1. Each of the regions contains sufficient context, but only the joints of persons that are very close.")
2 Umar Iqbal and Juergen Gall Fig. 1: Example image from the multi-person subset of the MPII Pose Dataset [16]. required. Instead body part proposals are generated and connected in a large graph. The approach then solves the labeling problem, the joint-to-person association problem and non-maximum suppression jointly. While the model proposed in [] can be solved by integer linear programming and achieves state-of-the-art results on a very small subset of the MPII Human Pose Dataset, the complexity makes it infeasible for a practical application. As reported in [5], the processing of a single image takes about 7 hours. In this work, we address the joint-to-person association problem using a densely connected graphical model as in [], but propose to solve it only locally. To this end, we first use a person detector and crop image regions as illustrated in Figure 1. Each of the regions contains sufficient context, but only the joints of persons that are very close. We then solve the joint-to-person association for the person in the center of each region by integer linear programming (ILP). The labeling of the joints and non-maxima suppression are directly performed by a convolutional neural network. We evaluate our approach on the MPII Human Pose Dataset for multiple persons where we slightly improve the accuracy of [] while reducing the runtime by a factor between 6,000 and 19,000. Related Work Human pose estimation has generally been addressed under the assumption that only a single person is visible. For this, earlier approaches formulate the problem in a graphical model where interactions between body parts are modelled in a tree structure combined with local observations obtained from discriminatively trained part detectors [17 3]. While the tree-structured models provide efficient inference, they struggle to model long-range characteristics of the human body. With the progress in convolutional neural network architectures, more recent works adopt NNs to obtain stronger part detectors but still use graphical models to obtain coherent pose estimates [4, 6, 7]. The state-of-the-art approaches, however, demonstrate that graphical models are of little importance in the presence of strong part detectors since the long-range relationships of the body parts can be directly incorporated in the part detectors [1 3,5,8 10]. In [3,8,9] multi-staged NN architectures are proposed where each stage of the network takes as input the score maps of all parts from its preceding stage. This provides additional information about the interdependence, co-occurrence, and context of parts to each stage, and thereby allows the network to implicitly learn image dependent spatial relationships between parts. Similarly, instead of a multi-staged architecture, [5] proposes to use a very
3 Multi-Person Pose Estimation with Local Joint-to-Person Associations 3 deep network that inherently results in large receptive fields and therefore allows to use contextual information around the parts. All of these methods report impressive results for single person pose estimation without an additional graphical model for refinement. In contrast to the single person pose estimation, multi-person pose estimation poses a significantly more complex problem, and only a few works have focused in this direction [, 5, 11 14,, 4 6]. [] and [4] perform non-maximum suppression on the marginals obtained using a graphical model to generate multiple pose hypotheses in an image. The approaches, however, can only work in scenarios where persons are significantly distant from each other and consider only the fully visible persons. The methods in [11 13] first detect the persons in an image using a person detector and then estimate the body pose for each person independently. [4] employs a similar approach for 3D pose estimation of multiple persons in a calibrated multi-camera scenario. The approach first obtains the number of persons using a person detector and then samples the 3D poses for each person from the marginals of a 3D pictorial structure model. For every detected person, [13] explores a range of tree structured models each containing only a subset of upper-body parts, and selects the best model based on a cost function that penalizes a model containing occluded parts. Since the search space of the models increases exponentially with the number of body parts, the approach is very expensive for full body skeletons. [14, 15] define a joint pose estimation model for all detected persons, and utilize several occlusion clues to model interactions between people. All these approaches rely on a standard pictorial structure model with tree structures and cannot incorporate dependencies beyond adjacent joints. More recently, [] proposed a joint objective function to solve multi-person pose estimation. The approach does not require a separate person detector or any prior information about the number of persons. Unlike earlier works it can tackle any type of occlusion or truncation. It starts by generating a set of class independent part proposals and constructs a densely connected graph from the proposals. It uses integer linear programming to label each proposal by a certain body part and assigns them to unique individuals. The optimization problem proposed in [] is theoretically well founded, but is an NP-Hard problem to solve and prohibitively expensive for realistic scenarios. Therefore, it limits the number of part proposals to 100. This means that the approach can estimate the poses of at most 7 fully visible persons with 14 body parts per person. Despite the restriction, the inference takes roughly 7 hours for a single image [5]. In [5], the authors build upon the same model and propose to use stronger part detectors and image dependent spatial models along with an incremental optimization approach that significantly reduces the optimization time of []. The approach, however, is still too slow for practical applications since it requires 8 minutes per image and still limits the number of proposals to a maximum of Overview Our method solves the problem of joint-to-person association locally for each person in the image. To this end, we first detect the persons using a person detector [7]. For each detected person, we generate a set of joint candidates using a single person pose estimation model (Section 4). The candidates are prone to errors since the single person
. The candidates build a fully connected graph (c) and the final pose estimates are obtained by integer linear programming (d).")

 of the j th joint in the image. The convolutional pose machines consist of a multi-staged NN architecture with t {1.")

4 4 Umar Iqbal and Juergen Gall (a) (b) (c) (d) Fig. : Overview of the proposed method. We detect persons in an image using a person detector (a). A set of joint candidates is generated for each detected person (b). The candidates build a fully connected graph (c) and the final pose estimates are obtained by integer linear programming (d). (best viewed in color) models do not take into account occlusion or truncation. In order to associate each joint to the correct person and also to remove the erroneous candidates, we perform inference locally on a fully connected graph for each person using integer linear programming (Section 5). Figure shows an overview of the proposed approach. 4 onvolutional Pose Machines Given a person in an image I, we define its pose as a set X = {xj }j=1...j of J = 14 body joints, where the vector xj X represents the D location (u, v) of the j th joint in the image. The convolutional pose machines consist of a multi-staged NN architecture with t {1... T } stages, where each stage is a multi-label classifier φt (x) that is trained to provide confidence maps sjt Rw h for each joint j = 1... J and the background, where w and h are the width and the height of the image, respectively. The first stage of the architecture uses only the local image evidence and provides the confidence scores φt=1 (x I) {sj1 (xj = x)}j=1...j+1. (1) Whereas, in addition to the local image evidence, all subsequent stages also utilize the contextual information from the preceding stages to produce confidence score maps φt>1 (x I, ψ(x, st 1 )) {sjt (xj = x)}j=1...j+1, ()
5 Multi-Person Pose Estimation with Local Joint-to-Person Associations 5 (a) Stage 1 Target Score Maps t = 1 Input 9 9 Image h w 3 P 9 9 P 9 9 P h + w ( + 1) Loss f 1 (b) Stage Target Score Maps t Input Image h w P 9 9 P 9 9 P h + w ( + 1) Loss f t Fig. 3: PM architecture proposed in [3]. The first stage (a) utilizes only the local image evidence whereas all subsequent stages (b) also utilize the output of preceding stages to exploit the spatial context between joints. The receptive field of stages t is increased by having multiple convolutional layers at the 8 times down-sampled score maps. All stages are locally supervised and a separate loss is computed for each stage. We provide multi-person target score maps to stage 1, and single-person score maps to all subsequent stages. where s t R w h (J+1) corresponds to the score maps of all body joints and the background at stage t, and ψ(x, s t 1 ) indicates the mapping from the scores s t 1 to the context features for location x. The receptive field of the subsequent stages is increased to the extent that the context of the complete person is available. This allows to model complex long-range spatial relationships between joints, and to leverage the context around the person. The PM architecture is completely differentiable and allows endto-end training of all stages. Due to the multi-stage nature of PM, the overall NN architecture consists of many layers and is therefore prone to the problem of vanishing gradients [3, 8, 9]. In order to solve this problem, [3] uses intermediate supervision by adding a loss function at each stage t. The NN architecture used for each stage can be seen in Figure 3. In this paper we exploit the intermediate supervision of the stages during training for multi-person human pose estimation as we will discuss in the next section. 4.1 Training for Multi-Person Pose Estimation Each stage of the PM is trained to produce confidence score maps for all body joints, and the loss function at the end of every stage computes the l distance between the predicted confidence scores and the target score maps. The target score maps are modeled as Gaussian distributions centered at the ground-truth locations of the joints. For multiperson pose estimation, the aim of the training is to focus only on the body joints of the detected person, while suppressing joints of all other overlapping persons. We do this by creating two types of target score maps. For the first stage, we model the target score
6 t = 3 t = t = 1 t = 3 t = t = 1 t = 3 t = t = 1 Input Image 6 Umar Iqbal and Juergen Gall Fig. 4: Example of target score maps for the head, neck and left shoulder. The target score maps for the first stage include the joints of all persons (left). The target score maps for all subsequent stages only include the joints of the primary person. Head Left shoulder Neck Right shoulder Right elbow Left wrist Left elbow Right wrist Right knee Left ankle Left knee Right ankle Fig. 5: Examples of score maps provided by different stages of the PM. The first stage of PM uses only local image evidence and therefore provides high confidence scores for the joints of all persons in the image. Whereas all subsequent stages are trained to provide high confidence scores only for the joints of the primary person while suppressing the joints of other persons. The primary person is highlighted by a yellow dot in the first row. (best viewed in color) maps by a sum of Gaussian distributions for the body joints of all persons appearing in the bounding box enclosing the primary person that appears roughly in the center of the bounding box. For the subsequent stages, we model only the joints of the primary person. An example of target score maps for different stages can be seen in Figure 4. Figure 5 shows some examples how the inferred score maps evolve as the number of stages increases. In [3], the pose of the person is obtained by taking the maximum of the inferred score maps, i.e., x j = argmax x s j T (x). This, however, assumes that all joints are visible in the image and results in erroneous estimates for invisible joints and can wrongly associate joints of other nearby persons to the primary person. Instead of taking the maximum, we sample N candidates from each
7 Multi-Person Pose Estimation with Local Joint-to-Person Associations 7 inferred score map s j T and resolve the joint-to-person association and outlier removal by integer linear programming. 5 Joint-to-Person Association We solve the joint-to-person association using a densely connected graphical model as in []. The model proposed in [], however, aims to resolve joint-to-person associations together with proposal labeling globally for all persons, which makes it very expensive to solve. In contrast, we propose to solve this problem locally for each person. We first briefly summarize the Deeput method [] in Section 5.1, and then describe the proposed local joint-to-person association model in Section Deeput Deeput aims to solve the problem of multi-person human pose estimation by jointly modeling the poses of all persons appearing in an image. Given an image, it starts by generating a set D of joint proposals, where x d Z denotes the D location of the d th proposal. The proposals are then used to formulate a graph optimization problem that aims to select a subset of proposals while suppressing the incompatible proposals, label each selected proposal with a joint type j 1... J, and associate them to unique individuals. The problem can be solved by integer linear programming (ILP), optimizing over the binary variables x {0, 1} D J, y {0, 1} ) (D, and z {0, 1} ( D ) J. For every proposal d, a set of variables {x dj } j=1...j is defined where x dj = 1 indicates that the proposal d is of body joint type j. For every pair of proposals dd, the variable y dd indicates that the proposals d and d belong to the same person. The variable z dd jj = 1 indicates that the proposal d is of joint type j, the proposal d is of joint type j, and both proposals belong to the same person (y dd = 1). The variable z dd jj is constrained such that z dd jj = x djx d j y dd. The solution of the ILP problem is obtained by optimizing the following objective function: min α, x + β, z (3) (x,y,z) X D subject to ( ) J d D jj : x dj + x dj 1 (4) ( ) D dd : y dd x dj, y dd x d j (5) j J j J ( ) D dd d : y dd + y d d 3 1 y dd (6) dd ( D ) jj J : x dj + x d j + y dd z dd jj z dd jj min(x dj, x d j, y dd ) (7)
8 8 Umar Iqbal and Juergen Gall and, optionally, where dd ( ) D jj J : x dj + x d j 1 y dd (8) α dj = log 1 p dj p dj (9) β dd jj = log 1 p dd jj (10) p dd jj α, x = α dj x dj (11) d D j J β, z = β dd jj z dd jj. (1) dd ( D j,j ) J The constraints (4)-(7) enforce that optimizing (3) results in valid body pose configurations for one or more persons. The constraints (4) ensure that a proposal d can be labeled with only one joint type, while the constraints (5) guarantee that any pair of proposals dd can belong to the same person only if both are not suppressed, i.e., x dj = 1 and x d j = 1. The constraints (6) are transitivity constraints and enforce for any three proposals dd d ( ) D 3 that if d and d belong to the same person, and d and d also belong to the same person, then the proposals d and d must also belong to the same person. The constraints (7) enforce that for any dd ( ) D and jj J, z dd jj = x djx d j y dd. The constraints (8) are only applicable for single-person human pose estimation, as they enforce that two proposals dd that are not suppressed must be grouped together. In (9), p dj (0, 1) are the body joint unaries and correspond to the probability of any proposal d being of joint type j. While in (10), p dd jj correspond to the conditional probability that a pair of proposals dd belongs to the same person, given that d and d are of joint type j and j, respectively. In [] this ILP formulation is referred as Subset Partitioning and Labelling Problem, as it partitions the initial pool of proposal candidates to unique individuals, labels each proposal with a joint type j, and inherently suppresses the incompatible candidates. 5. Local Joint-to-Person Association In contrast to [], we solve the joint-to-person association problem locally for each person. We also do not label generic proposals as part of the ILP formulation since we use a neural network to obtain detections for each joint as described in Section 4. We therefore start with a set of joint detections D J, where every detection d j at location x dj Z has a known joint type j 1... J. Our model requires only two types of binary random variables x {0, 1} D J and y {0, 1} (D J ). Here, xdj = 1 indicates that the detection d j of part type j is not suppressed, and y djd = 1 indicates that the j detection d j of type j, and the detection d j of type j belong to the same person. The
9 Multi-Person Pose Estimation with Local Joint-to-Person Associations 9 objective function for local joint-to-person association takes the form: min α, x + β, y (13) (x,y) X DJ subject to d j d j d j d j d j d j d j ( ) DJ ) ( DJ 3 ( DJ ) : y djd j x dj, y djd j x d j (14) : y djd j + y d j d j 1 y d jd j (15) : x dj + x d j 1 y d jd j (16) where α dj = log 1 p d j p dj (17) β djd = log 1 p d jd j (18) j p djd j α, x = α dj x dj (19) d j D J β, y = β djd y j d jd. (0) j d jd j ( D J ) The constraints (14) enforce that detection d j and d j are connected (y d jd = 1) only if j both are not suppressed, i.e., x dj = 1 and x d = 1. The constraints (15) are transitivity j constraints as before and the constraints (16) guarantee that all detections that are not suppressed belong to the primary person. We can see from (3)-(8) and (13)-(16), that the number of variables are reduced from (D J + ( ) ( D + D ) J ) to (D J + ( D J ) ). Similary, the number of constraints is also drastically reduced. In (17), p dj (0, 1) is the confidence of the joint detection d j as probability. We obtain this directly from the score maps inferred by the PM as p dj = f τ (s j T (x d j )), where f τ (s) = { s if s τ 0 otherwise, and τ is a threshold that suppresses detections with a low confidence score. In (18), p djd (0, 1) corresponds to the conditional probability that the detection j d j of joint type j and the detection d j of joint type j belong to the same person. For j = j, it is the probability that both detections d j and d j belong to the same body joint. For j j, it measures the compatibility between two detection candidates of different joint types. Similar to [], we obtain these probabilities by learning discriminative models (1)
10 10 Umar Iqbal and Juergen Gall based on appearance and spatial features of the detection candidates. For j = j, we define a feature vector f djd j = { x, exp( x), ( x) }, () where x = ( u, v) is the D offset between the locations x dj and x d. For j j, j we define a separate feature vector based on the spatial locations as well as the appearance features obtained from the joint detectors as ( ) v f djd = { x, x, arctan, s j T (x dj ), s T (x d u j )}, (3) where s T (x) is a vector containing the confidences of all joints and the background at location x. For both cases, we gather positive and negative samples from the annotated poses in the training data and train an SVM with RBF kernel using LibSVM [30] for ). In order to obtain the probabilities pdjd j each pair jj ( J (0, 1) we use Platt scaling [31] to normalize the output of the SVMs to probabilities. After optimizing (13), the pose of the primary person is given by the detections with x dj = 1. 6 Experiments We evaluate the proposed approach on the Multi-Person subset of the MPII Human Pose Dataset [16] and follow the evaluation protocol proposed in []. The dataset consists of 3844 training and 1758 testing images with multiple persons. The persons appear in highly articulated poses with a large amount of occlusions and truncations. Since the original test data of the dataset is withheld, we perform all intermediate experiments on a validation set of 100 images. The validation set is sampled according to the split proposed in [4] for the single person setup, i.e., we chose all multi-person images that are part of the validation test set proposed in [4] and use all other images for training. In addition we compare the proposed method with the state-of-the-art approach [] on their selected subset of 88 images, and also compare with [5] on the complete test set. The accuracy is measured by average precision (AP) for each joint using the scripts provided by []. 6.1 Implementation Details In order to localize the persons, we use the person detector proposed in [7]. The detector is trained on the Pascal VO dataset [3]. For the quantitative evaluation, we discard detected persons with a bounding box area less equal to pixels since small persons are not annotated in the MPII Human Pose Dataset. For the qualitative results shown in Figure 7, we do not discard the small detections. For the PM [3], we use the publicly available source code and train it on the Multi-Person subset of the MPII Human Pose Dataset as described in Section 4. As in [3], we add images from the Leeds Sports Dataset [33] during training, and use a 6 stage (T = 6) PM architecture. For solving (13), we use the Gurobi Optimizer.
11 Multi-Person Pose Estimation with Local Joint-to-Person Associations 11 Accuracy (AP), % τ Fig. 6: Impact of the parameter τ in (1) on the pose estimation accuracy. Setting Head Shoulder Elbow Wrist Hip Knee Ankle Total time (s) PM only PM+L-JPA (N=1) PM+L-JPA (N=3) PM+L-JPA (N=5) PM+L-JPA (N=5)+GT Torso Table 1: Pose estimation results (AP) on the validation test set (100 images) of the MPII Multi-Person Pose Dataset. 6. Results We first evaluate the impact of the parameter τ in f τ (s) (1) on the pose estimation accuracy measured as mean AP on the validation set containing 100 images. Figure 6 shows that the function f τ improves the accuracy when τ is increased until τ = 0.3. For τ > 0.4, the accuracy drops since a high value discards correct detections. For the following experiments, we use τ = 0.. Table 1 reports the pose estimation results under different settings of the proposed approach on the validation set. We also report the median run-time required by each setting 1. Using only the PM to estimate the pose of each detected person achieves 45.% map and takes only seconds per image. Using the proposed Local Joint-to- Person Association (L-JPA) model with 1 detection candidate per joint (N = 1) to suppress the incompatible detections improves the performance from 45.% to 49.% with a very slight increase in run-time. Increasing the number of candidates per joint increases the accuracy only slightly. For the following experiments, we use N = 5. When we compare the numbers with Figure 6, we observe that PM+L-JPA outperforms PM for any 0 τ 0.4. The accuracy also depends on the used person detector. We use an off-the-shelf person detector without any fine-tuning on the MPII dataset. In order to evaluate the impact of the person detector accuracy, we also estimate poses when the person detections are given by the ground-truth torso (GT Torso) locations of the persons provided with 1 Measured on a GHz Intel(R) Xeon(R) PU with a single core and NVidia Geforce GTX Titan-X GPU.
12 1 Umar Iqbal and Juergen Gall Setting Head Shoulder Elbow Wrist Hip Knee Ankle Total time (s) Ours Deeput [] Deeperut [5] Ours GT ROI Deeput GT ROI [] hen et al., GT ROI [6] Table : omparison of pose estimation results (AP) with state-of-the-art approaches on 88 images []. Setting Head Shoulder Elbow Wrist Hip Knee Ankle Total time (s) Ours Deeperut [5] Using GT ROIs Ours + GT Torso Table 3: Pose estimation results (AP) on the withheld test set of the MPII Multi-Person Pose Dataset. the dataset. This results in a significant improvement in accuracy from 49.3% to 76.9% map, showing that a better person detector would improve the results further. Table compares the proposed approach with other approaches on a selected subset of 88 test images used in []. Our approach outperforms the state-of-the-art method Deeput [] (54.7% vs. 53.5%) while being significantly faster (10 seconds vs seconds). If we use N = 1, our approach requires only 3 seconds per image with a minimal loss of accuracy as shown in Table 1, i.e., our approach is more than 19,000 times faster than []. We also compare with a concurrent work [5]. While the approach [5] achieves a higher accuracy than our method, our method is significantly faster (10 seconds vs. 30 seconds). In contrast to [5], we do not perform fine-tuning of the person detector on the MPII Multi-Person Pose Dataset and envision that doing this will lead to further improvements. We therefore compare with two additional approaches [, 6] when using GT bounding boxes of the persons. The results for [6] are taken from []. Our approach outperforms both methods by a large margin. Finally in Table 3, we report our results on all test images of the MPII Multi-Person Pose Dataset. Our method achieves 43.1% map. While the approach [] cannot be evaluated on all test images due to the high computational complexity of the model, [5] reports a higher accuracy than our model. However, if we compare the run-times in Table and Table 3, we observe that the run-time of [5] doubles on the more challenging test set (485 seconds per image). Our approach on the other hand requires only 10 seconds in all evaluation settings and is around 50 times faster. If we use N = 1, our approach is 160 times faster than [5]. Using the torso annotation (GT Torso) as person detections results again in a significant improvement of the accuracy (6.% vs. 43.1% map). Some qualitative results can be seen in Figure 7.























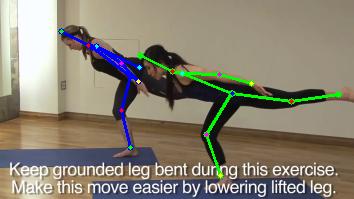

13 Multi-Person Pose Estimation with Local Joint-to-Person Associations Fig. 7: Some qualitative results for the MPII Multi-Person Pose Dataset. 13
14 14 Umar Iqbal and Juergen Gall 7 onclusion In this work we have presented an approach for multi-person pose estimation under occlusions and truncations. Since the global modeling of poses for all persons is impractical, we demonstrated that the problem can be formulated by a set of independent local joint-to-person association problems. ompared to global modeling, these problems can be solved efficiently while still being effective for handling severe occlusions or truncations. Although the accuracy can be further improved by using a better person detector, the proposed method already achieves the accuracy of a state-of-the-art method, while being 6,000 to 19,000 times faster. Acknowledgements: The work was partially supported by the ER Starting Grant ARA (677650). References 1. arreira, J., Agrawal, P., Fragkiadaki, K., Malik, J.: Human pose estimation with iterative error feedback. In: VPR. (016). Pishchulin, L., Insafutdinov, E., Tang, S., Andres, B., Andriluka, M., Gehler, P., Schiele, B.: Deepcut: Joint subset partition and labeling for multi person pose estimation. In: VPR. (016) 3. Wei, S.E., Ramakrishna, V., Kanade, T., Sheikh, Y.: onvolutional pose machines. In: VPR. (016) 4. Tompson, J., Goroshin, R., Jain, A., Leun, Y., Bregler,.: Efficient object localization using convolutional networks. In: VPR. (015) 5. Insafutdinov, E., Pishchulin, L., Andres, B., Andriluka, M., Schiele, B.: Deepercut: A deeper, stronger, and faster multi-person pose estimation model. In: EV. (016) 6. hen, X., Yuille, A.L.: Articulated pose estimation by a graphical model with image dependent pairwise relations. In: NIPS. (014) 7. Tompson, J., Jain, A., Leun, Y., Bregler,.: Joint training of a convolutional network and a graphical model for human pose estimation. In: NIPS. (014) 8. Newell, A., Yang, K., Deng, J.: Stacked hourglass networks for human pose estimation. In: EV. (016) 9. Bulat, A., Tzimiropoulos, G.: Human pose estimation via convolutional part heatmap regression. In: EV. (016) 10. Rafi, U., I.Kostrikov, Gall, J., Leibe, B.: An efficient convolutional network for human pose estimation. In: BMV. (016) 11. Pishchulin, L., Jain, A., Andriluka, M., Thormählen, T., Schiele, B.: Articulated people detection and pose estimation: Reshaping the future. In: VPR. (01) 1. Gkioxari, G., Hariharan, B., Girshick, R., Malik, J.: Using k-poselets for detecting people and localizing their keypoints. In: VPR. (014) 13. hen, X., Yuille, A.L.: Parsing occluded people by flexible compositions. In: VPR. (015) 14. Eichner, M., Ferrari, V.: We are family: Joint pose estimation of multiple persons. In: EV. (010) 15. Ladicky, L., Torr, P.H., Zisserman, A.: Human pose estimation using a joint pixel-wise and part-wise formulation. In: VPR. (013) 16. Andriluka, M., Pishchulin, L., Gehler, P., Schiele, B.: d human pose estimation: New benchmark and state of the art analysis. In: VPR. (014)
15 Multi-Person Pose Estimation with Local Joint-to-Person Associations Felzenszwalb, P.F., Huttenlocher, D.P.: Pictorial structures for object recognition. IJV (005) 18. Tran, D., Forsyth, D.: Improved human parsing with a full relational model. In: EV. (010) 19. Andriluka, M., Roth, S., Schiele, B.: Discriminative appearance models for pictorial structures. IJV (01) 0. Pishchulin, L., Andriluka, M., Gehler, P., Schiele, B.: Poselet conditioned pictorial structures. In: VPR. (013) 1. Wang, F., Li, Y.: Beyond physical connections: Tree models in human pose estimation. In: VPR. (013). Yang, Y., Ramanan, D.: Articulated human detection with flexible mixtures of parts. TPAMI (013) 3. Dantone, M., Leistner,., Gall, J., Van Gool, L.: Body parts dependent joint regressors for human pose estimation in still images. TPAMI (014) 4. Sun, M., Savarese, S.: Articulated part-based model for joint object detection and pose estimation. In: IV. (011) 5. Ladicky, L., Torr, P., Zisserman, A.: Human pose estimation using a joint pixel-wise and part-wise formulation. In: VPR. (013) 6. Belagiannis, V., Amin, S., Andriluka, M., Schiele, B., Navab, N., Ilic, S.: 3d pictorial structures revisited: Multiple human pose estimation. TPAMI (015) 7. Ren, S., He, K., Girshick, R., Sun, J.: Faster R-NN: Towards real-time object detection with region proposal networks. In: NIPS. (015) 8. Bengio, Y., Simard, P., Frasconi, P.: Learning long-term dependencies with gradient descent is difficult. TNN (1994) 9. Glorot, X., Bengio, Y.: Understanding the difficulty of training deep feedforward neural networks. In: AISTATS. (010) 30. hang,.., Lin,.J.: LIBSVM: A library for support vector machines. AM TIST (011) 31. Platt, J..: Probabilistic outputs for support vector machines and comparisons to regularized likelihood methods. In: Advances in Large Margin lassifiers. (1999) 3. Everingham, M., Eslami, S.M.A., Van Gool, L., Williams,.K.I., Winn, J., Zisserman, A.: The PASAL visual object classes challenge: A retrospective. IJV (015) 33. Johnson, S., Everingham, M.: lustered pose and nonlinear appearance models for human pose estimation. In: BMV. (010)
arxiv: v1 [cs.cv] 24 Nov 2016
![arxiv: v1 [cs.cv] 24 Nov 2016](/thumbs/92/110503181.jpg "arxiv: v1 [cs.cv] 24 Nov 2016") Realtime Multi-Person 2D Pose Estimation using Part Affinity Fields Zhe ao Tomas Simon Shih-En Wei Yaser Sheikh The Robotics Institute, arnegie Mellon University arxiv:6.85v [cs.v] 24 Nov 26 {zhecao,shihenw}@cmu.edu
Realtime Multi-Person 2D Pose Estimation using Part Affinity Fields Zhe ao Tomas Simon Shih-En Wei Yaser Sheikh The Robotics Institute, arnegie Mellon University arxiv:6.85v [cs.v] 24 Nov 26 {zhecao,shihenw}@cmu.edu
An Efficient Convolutional Network for Human Pose Estimation
 RAFI, KOSTRIKOV, GALL, LEIBE: EFFICIENT CNN FOR HUMAN POSE ESTIMATION 1 An Efficient Convolutional Network for Human Pose Estimation Umer Rafi 1 rafi@vision.rwth-aachen.de Ilya Kostrikov 1 ilya.kostrikov@rwth-aachen.de
RAFI, KOSTRIKOV, GALL, LEIBE: EFFICIENT CNN FOR HUMAN POSE ESTIMATION 1 An Efficient Convolutional Network for Human Pose Estimation Umer Rafi 1 rafi@vision.rwth-aachen.de Ilya Kostrikov 1 ilya.kostrikov@rwth-aachen.de
An Efficient Convolutional Network for Human Pose Estimation
 RAFI, LEIBE, GALL: 1 An Efficient Convolutional Network for Human Pose Estimation Umer Rafi 1 rafi@vision.rwth-aachen.de Juergen Gall 2 gall@informatik.uni-bonn.de Bastian Leibe 1 leibe@vision.rwth-aachen.de
RAFI, LEIBE, GALL: 1 An Efficient Convolutional Network for Human Pose Estimation Umer Rafi 1 rafi@vision.rwth-aachen.de Juergen Gall 2 gall@informatik.uni-bonn.de Bastian Leibe 1 leibe@vision.rwth-aachen.de
arxiv: v3 [cs.cv] 28 Mar 2016 Abstract
![arxiv: v3 [cs.cv] 28 Mar 2016 Abstract](/thumbs/81/82843229.jpg "arxiv: v3 [cs.cv] 28 Mar 2016 Abstract") onvolutional ose Machines Shih-En Wei shihenw@cmu.edu Varun Ramakrishna varunnr@cs.cmu.edu Takeo Kanade Takeo.Kanade@cs.cmu.edu The Robotics Institute arnegie Mellon University Yaser Sheikh yaser@cs.cmu.edu
onvolutional ose Machines Shih-En Wei shihenw@cmu.edu Varun Ramakrishna varunnr@cs.cmu.edu Takeo Kanade Takeo.Kanade@cs.cmu.edu The Robotics Institute arnegie Mellon University Yaser Sheikh yaser@cs.cmu.edu
Combining PGMs and Discriminative Models for Upper Body Pose Detection
 Combining PGMs and Discriminative Models for Upper Body Pose Detection Gedas Bertasius May 30, 2014 1 Introduction In this project, I utilized probabilistic graphical models together with discriminative
Combining PGMs and Discriminative Models for Upper Body Pose Detection Gedas Bertasius May 30, 2014 1 Introduction In this project, I utilized probabilistic graphical models together with discriminative
Realtime Multi-Person 2D Pose Estimation using Part Affinity Fields
 Realtime Multi-Person 2D Pose Estimation using Part Affinity Fields Zhe ao MU-RI-TR-17-18 April 217 Thesis ommittee: Yaser Sheikh Deva Ramanan Aayush Bansal Robotics Institute arnegie Mellon University
Realtime Multi-Person 2D Pose Estimation using Part Affinity Fields Zhe ao MU-RI-TR-17-18 April 217 Thesis ommittee: Yaser Sheikh Deva Ramanan Aayush Bansal Robotics Institute arnegie Mellon University
Multi-Scale Structure-Aware Network for Human Pose Estimation
 Multi-Scale Structure-Aware Network for Human Pose Estimation Lipeng Ke 1, Ming-Ching Chang 2, Honggang Qi 1, and Siwei Lyu 2 1 University of Chinese Academy of Sciences, Beijing, China 2 University at
Multi-Scale Structure-Aware Network for Human Pose Estimation Lipeng Ke 1, Ming-Ching Chang 2, Honggang Qi 1, and Siwei Lyu 2 1 University of Chinese Academy of Sciences, Beijing, China 2 University at
arxiv: v2 [cs.cv] 14 Apr 2017
![arxiv: v2 [cs.cv] 14 Apr 2017](/thumbs/76/73596867.jpg "arxiv: v2 [cs.cv] 14 Apr 2017") Towards Accurate Multi-person Pose Estimation in the Wild George Papandreou, Tyler Zhu, Nori Kanazawa, Alexander Toshev, Jonathan Tompson, Chris Bregler, Kevin Murphy Google, Inc. [gpapan, tylerzhu, kanazawa,
Towards Accurate Multi-person Pose Estimation in the Wild George Papandreou, Tyler Zhu, Nori Kanazawa, Alexander Toshev, Jonathan Tompson, Chris Bregler, Kevin Murphy Google, Inc. [gpapan, tylerzhu, kanazawa,
Multi-Scale Structure-Aware Network for Human Pose Estimation
 Multi-Scale Structure-Aware Network for Human Pose Estimation Lipeng Ke 1, Ming-Ching Chang 2, Honggang Qi 1, Siwei Lyu 2 1 University of Chinese Academy of Sciences, Beijing, China 2 University at Albany,
Multi-Scale Structure-Aware Network for Human Pose Estimation Lipeng Ke 1, Ming-Ching Chang 2, Honggang Qi 1, Siwei Lyu 2 1 University of Chinese Academy of Sciences, Beijing, China 2 University at Albany,
Convolutional Pose Machines
 onvolutional ose Machines Shih-En Wei shihenw@cmu.edu Varun Ramakrishna vramakri@cs.cmu.edu Takeo Kanade Takeo.Kanade@cs.cmu.edu The Robotics Institute arnegie Mellon University Yaser Sheikh yaser@cs.cmu.edu
onvolutional ose Machines Shih-En Wei shihenw@cmu.edu Varun Ramakrishna vramakri@cs.cmu.edu Takeo Kanade Takeo.Kanade@cs.cmu.edu The Robotics Institute arnegie Mellon University Yaser Sheikh yaser@cs.cmu.edu
arxiv: v3 [cs.cv] 9 Jun 2015
![arxiv: v3 [cs.cv] 9 Jun 2015](/thumbs/80/82004382.jpg "arxiv: v3 [cs.cv] 9 Jun 2015") Efficient Object Localization Using Convolutional Networks Jonathan Tompson, Ross Goroshin, Arjun Jain, Yann LeCun, Christoph Bregler New York University tompson/goroshin/ajain/lecun/bregler@cims.nyu.edu
Efficient Object Localization Using Convolutional Networks Jonathan Tompson, Ross Goroshin, Arjun Jain, Yann LeCun, Christoph Bregler New York University tompson/goroshin/ajain/lecun/bregler@cims.nyu.edu
Deep globally constrained MRFs for Human Pose Estimation
 Deep globally constrained MRFs for Human Pose Estimation Ioannis Marras, Petar Palasek and Ioannis Patras School of Electronic Engineering and Computer Science, Queen Mary University of London, United
Deep globally constrained MRFs for Human Pose Estimation Ioannis Marras, Petar Palasek and Ioannis Patras School of Electronic Engineering and Computer Science, Queen Mary University of London, United
arxiv: v4 [cs.cv] 2 Sep 2017
![arxiv: v4 [cs.cv] 2 Sep 2017](/thumbs/81/83455566.jpg "arxiv: v4 [cs.cv] 2 Sep 2017") RMPE: Regional Multi-Person Pose Estimation Hao-Shu Fang 1, Shuqin Xie 1, Yu-Wing Tai 2, Cewu Lu 1 1 Shanghai Jiao Tong University, China 2 Tencent YouTu fhaoshu@gmail.com qweasdshu@sjtu.edu.cn yuwingtai@tencent.com
RMPE: Regional Multi-Person Pose Estimation Hao-Shu Fang 1, Shuqin Xie 1, Yu-Wing Tai 2, Cewu Lu 1 1 Shanghai Jiao Tong University, China 2 Tencent YouTu fhaoshu@gmail.com qweasdshu@sjtu.edu.cn yuwingtai@tencent.com
Pose for Action Action for Pose
 Pose for Action Action for Pose Umar Iqbal, Martin Garbade, and Juergen Gall Computer Vision Group, University of Bonn, Germany {uiqbal, garbade, gall}@iai.uni-bonn.de Abstract In this work we propose
Pose for Action Action for Pose Umar Iqbal, Martin Garbade, and Juergen Gall Computer Vision Group, University of Bonn, Germany {uiqbal, garbade, gall}@iai.uni-bonn.de Abstract In this work we propose
Ensemble Convolutional Neural Networks for Pose Estimation
 Ensemble Convolutional Neural Networks for Pose Estimation Yuki Kawana b, Norimichi Ukita a,, Jia-Bin Huang c, Ming-Hsuan Yang d a Toyota Technological Institute, Japan b Nara Institute of Science and
Ensemble Convolutional Neural Networks for Pose Estimation Yuki Kawana b, Norimichi Ukita a,, Jia-Bin Huang c, Ming-Hsuan Yang d a Toyota Technological Institute, Japan b Nara Institute of Science and
Multi-scale Adaptive Structure Network for Human Pose Estimation from Color Images
 Multi-scale Adaptive Structure Network for Human Pose Estimation from Color Images Wenlin Zhuang 1, Cong Peng 2, Siyu Xia 1, and Yangang, Wang 1 1 School of Automation, Southeast University, Nanjing, China
Multi-scale Adaptive Structure Network for Human Pose Estimation from Color Images Wenlin Zhuang 1, Cong Peng 2, Siyu Xia 1, and Yangang, Wang 1 1 School of Automation, Southeast University, Nanjing, China
arxiv: v2 [cs.cv] 10 Feb 2017
![arxiv: v2 [cs.cv] 10 Feb 2017](/thumbs/79/79534533.jpg "arxiv: v2 [cs.cv] 10 Feb 2017") Pose for Action Action for Pose Umar Iqbal, Martin Garbade, and Juergen Gall Computer Vision Group, University of Bonn, Germany {uiqbal, garbade, gall}@iai.uni-bonn.de arxiv:1603.04037v2 [cs.cv] 10 Feb
Pose for Action Action for Pose Umar Iqbal, Martin Garbade, and Juergen Gall Computer Vision Group, University of Bonn, Germany {uiqbal, garbade, gall}@iai.uni-bonn.de arxiv:1603.04037v2 [cs.cv] 10 Feb
arxiv: v5 [cs.cv] 4 Feb 2018
![arxiv: v5 [cs.cv] 4 Feb 2018](/thumbs/78/77842416.jpg "arxiv: v5 [cs.cv] 4 Feb 2018") RMPE: Regional Multi-Person Pose Estimation Hao-Shu Fang 1, Shuqin Xie 1, Yu-Wing Tai 2, Cewu Lu 1 1 Shanghai Jiao Tong University, China 2 Tencent YouTu fhaoshu@gmail.com qweasdshu@sjtu.edu.cn yuwingtai@tencent.com
RMPE: Regional Multi-Person Pose Estimation Hao-Shu Fang 1, Shuqin Xie 1, Yu-Wing Tai 2, Cewu Lu 1 1 Shanghai Jiao Tong University, China 2 Tencent YouTu fhaoshu@gmail.com qweasdshu@sjtu.edu.cn yuwingtai@tencent.com
PoseTrack: Joint Multi-Person Pose Estimation and Tracking
 PoseTrack: Joint Multi-Person Pose Estimation and Tracking Umar Iqbal1, Anton Milan2, and Juergen Gall1 1 Computer Vision Group, University of Bonn, Germany 2 Australian Centre for Visual Technologies,
PoseTrack: Joint Multi-Person Pose Estimation and Tracking Umar Iqbal1, Anton Milan2, and Juergen Gall1 1 Computer Vision Group, University of Bonn, Germany 2 Australian Centre for Visual Technologies,
arxiv: v1 [cs.cv] 6 Oct 2017
![arxiv: v1 [cs.cv] 6 Oct 2017](/thumbs/79/79518536.jpg "arxiv: v1 [cs.cv] 6 Oct 2017") Human Pose Regression by Combining Indirect Part Detection and Contextual Information arxiv:1710.02322v1 [cs.cv] 6 Oct 2017 Diogo C. Luvizon Abstract In this paper, we propose an end-to-end trainable regression
Human Pose Regression by Combining Indirect Part Detection and Contextual Information arxiv:1710.02322v1 [cs.cv] 6 Oct 2017 Diogo C. Luvizon Abstract In this paper, we propose an end-to-end trainable regression
Human Pose Estimation using Global and Local Normalization. Ke Sun, Cuiling Lan, Junliang Xing, Wenjun Zeng, Dong Liu, Jingdong Wang
 Human Pose Estimation using Global and Local Normalization Ke Sun, Cuiling Lan, Junliang Xing, Wenjun Zeng, Dong Liu, Jingdong Wang Overview of the supplementary material In this supplementary material,
Human Pose Estimation using Global and Local Normalization Ke Sun, Cuiling Lan, Junliang Xing, Wenjun Zeng, Dong Liu, Jingdong Wang Overview of the supplementary material In this supplementary material,
Body Parts Dependent Joint Regressors for Human Pose Estimation in Still Images
 Research Collection Journal Article Body Parts Dependent Joint Regressors for Human Pose Estimation in Still Images Author(s): Dantone, Matthias; Gall, Juergen; Leistner, Christian; Van Gool, Luc Publication
Research Collection Journal Article Body Parts Dependent Joint Regressors for Human Pose Estimation in Still Images Author(s): Dantone, Matthias; Gall, Juergen; Leistner, Christian; Van Gool, Luc Publication
Thin-Slicing Network: A Deep Structured Model for Pose Estimation in Videos
 Thin-Slicing Network: A Deep Structured Model for Pose Estimation in Videos Jie Song Limin Wang2 AIT Lab, ETH Zurich Luc Van Gool2 2 Otmar Hilliges Computer Vision Lab, ETH Zurich Abstract Deep ConvNets
Thin-Slicing Network: A Deep Structured Model for Pose Estimation in Videos Jie Song Limin Wang2 AIT Lab, ETH Zurich Luc Van Gool2 2 Otmar Hilliges Computer Vision Lab, ETH Zurich Abstract Deep ConvNets
A Dual-Source Approach for 3D Human Pose Estimation from Single Images
 1 Computer Vision and Image Understanding journal homepage: www.elsevier.com A Dual-Source Approach for 3D Human Pose Estimation from Single Images Umar Iqbal a,, Andreas Doering a, Hashim Yasin b, Björn
1 Computer Vision and Image Understanding journal homepage: www.elsevier.com A Dual-Source Approach for 3D Human Pose Estimation from Single Images Umar Iqbal a,, Andreas Doering a, Hashim Yasin b, Björn
arxiv: v2 [cs.cv] 26 Apr 2016
![arxiv: v2 [cs.cv] 26 Apr 2016](/thumbs/75/72294067.jpg "arxiv: v2 [cs.cv] 26 Apr 2016") eepcut: Joint Subset Partition and Labeling for Multi Person Pose Estimation Leonid Pishchulin, Eldar Insafutdinov, Siyu Tang, Bjoern Andres, Mykhaylo Andriluka,, Peter Gehler, and Bernt Schiele arxiv:.0v
eepcut: Joint Subset Partition and Labeling for Multi Person Pose Estimation Leonid Pishchulin, Eldar Insafutdinov, Siyu Tang, Bjoern Andres, Mykhaylo Andriluka,, Peter Gehler, and Bernt Schiele arxiv:.0v
arxiv: v1 [cs.cv] 20 Nov 2015
![arxiv: v1 [cs.cv] 20 Nov 2015](/thumbs/88/115969830.jpg "arxiv: v1 [cs.cv] 20 Nov 2015") eepcut: Joint Subset Partition and Labeling for Multi Person Pose Estimation Leonid Pishchulin, Eldar Insafutdinov, Siyu Tang, Bjoern Andres, Mykhaylo Andriluka,, Peter Gehler, and Bernt Schiele arxiv:.0v
eepcut: Joint Subset Partition and Labeling for Multi Person Pose Estimation Leonid Pishchulin, Eldar Insafutdinov, Siyu Tang, Bjoern Andres, Mykhaylo Andriluka,, Peter Gehler, and Bernt Schiele arxiv:.0v
ECE 6554:Advanced Computer Vision Pose Estimation
 ECE 6554:Advanced Computer Vision Pose Estimation Sujay Yadawadkar, Virginia Tech, Agenda: Pose Estimation: Part Based Models for Pose Estimation Pose Estimation with Convolutional Neural Networks (Deep
ECE 6554:Advanced Computer Vision Pose Estimation Sujay Yadawadkar, Virginia Tech, Agenda: Pose Estimation: Part Based Models for Pose Estimation Pose Estimation with Convolutional Neural Networks (Deep
THE task of human pose estimation is to determine the. Knowledge-Guided Deep Fractal Neural Networks for Human Pose Estimation
 1 Knowledge-Guided Deep Fractal Neural Networks for Human Pose Estimation Guanghan Ning, Student Member, IEEE, Zhi Zhang, Student Member, IEEE, and Zhihai He, Fellow, IEEE arxiv:1705.02407v2 [cs.cv] 8
1 Knowledge-Guided Deep Fractal Neural Networks for Human Pose Estimation Guanghan Ning, Student Member, IEEE, Zhi Zhang, Student Member, IEEE, and Zhihai He, Fellow, IEEE arxiv:1705.02407v2 [cs.cv] 8
Estimating Human Pose in Images. Navraj Singh December 11, 2009
 Estimating Human Pose in Images Navraj Singh December 11, 2009 Introduction This project attempts to improve the performance of an existing method of estimating the pose of humans in still images. Tasks
Estimating Human Pose in Images Navraj Singh December 11, 2009 Introduction This project attempts to improve the performance of an existing method of estimating the pose of humans in still images. Tasks
Combining Local Appearance and Holistic View: Dual-Source Deep Neural Networks for Human Pose Estimation
 Combining Local Appearance and Holistic View: Dual-Source Deep Neural Networks for Human Pose Estimation Xiaochuan Fan, Kang Zheng, Yuewei Lin, Song Wang Department of Computer Science & Engineering, University
Combining Local Appearance and Holistic View: Dual-Source Deep Neural Networks for Human Pose Estimation Xiaochuan Fan, Kang Zheng, Yuewei Lin, Song Wang Department of Computer Science & Engineering, University
Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks
 Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks Shaoqing Ren, Kaiming He, Ross Girshick, and Jian Sun Presented by Tushar Bansal Objective 1. Get bounding box for all objects
Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks Shaoqing Ren, Kaiming He, Ross Girshick, and Jian Sun Presented by Tushar Bansal Objective 1. Get bounding box for all objects
Easy Minimax Estimation with Random Forests for Human Pose Estimation
 Easy Minimax Estimation with Random Forests for Human Pose Estimation P. Daphne Tsatsoulis and David Forsyth Department of Computer Science University of Illinois at Urbana-Champaign {tsatsou2, daf}@illinois.edu
Easy Minimax Estimation with Random Forests for Human Pose Estimation P. Daphne Tsatsoulis and David Forsyth Department of Computer Science University of Illinois at Urbana-Champaign {tsatsou2, daf}@illinois.edu
Using k-poselets for detecting people and localizing their keypoints
 Using k-poselets for detecting people and localizing their keypoints Georgia Gkioxari, Bharath Hariharan, Ross Girshick and itendra Malik University of California, Berkeley - Berkeley, CA 94720 {gkioxari,bharath2,rbg,malik}@berkeley.edu
Using k-poselets for detecting people and localizing their keypoints Georgia Gkioxari, Bharath Hariharan, Ross Girshick and itendra Malik University of California, Berkeley - Berkeley, CA 94720 {gkioxari,bharath2,rbg,malik}@berkeley.edu
arxiv: v2 [cs.cv] 15 Aug 2017 Abstract
![arxiv: v2 [cs.cv] 15 Aug 2017 Abstract](/thumbs/84/89136570.jpg "arxiv: v2 [cs.cv] 15 Aug 2017 Abstract") Self Adversarial Training for Human Pose Estimation Chia-Jung Chou, Jui-Ting Chien, and Hwann-Tzong Chen Department of Computer Science National Tsing Hua University, Taiwan {jessie33321, ydnaandy123}@gmail.com
Self Adversarial Training for Human Pose Estimation Chia-Jung Chou, Jui-Ting Chien, and Hwann-Tzong Chen Department of Computer Science National Tsing Hua University, Taiwan {jessie33321, ydnaandy123}@gmail.com
DeepPose & Convolutional Pose Machines
 DeepPose & Convolutional Pose Machines Main Concepts 1. 2. 3. 4. CNN with regressor head. Object Localization. Bigger to smaller or Smaller to bigger view. Deep Supervised learning to prevent Vanishing
DeepPose & Convolutional Pose Machines Main Concepts 1. 2. 3. 4. CNN with regressor head. Object Localization. Bigger to smaller or Smaller to bigger view. Deep Supervised learning to prevent Vanishing
MULTI-SCALE OBJECT DETECTION WITH FEATURE FUSION AND REGION OBJECTNESS NETWORK. Wenjie Guan, YueXian Zou*, Xiaoqun Zhou
 MULTI-SCALE OBJECT DETECTION WITH FEATURE FUSION AND REGION OBJECTNESS NETWORK Wenjie Guan, YueXian Zou*, Xiaoqun Zhou ADSPLAB/Intelligent Lab, School of ECE, Peking University, Shenzhen,518055, China
MULTI-SCALE OBJECT DETECTION WITH FEATURE FUSION AND REGION OBJECTNESS NETWORK Wenjie Guan, YueXian Zou*, Xiaoqun Zhou ADSPLAB/Intelligent Lab, School of ECE, Peking University, Shenzhen,518055, China
arxiv: v2 [cs.cv] 8 Apr 2018
![arxiv: v2 [cs.cv] 8 Apr 2018](/thumbs/80/82499963.jpg "arxiv: v2 [cs.cv] 8 Apr 2018") Cascaded Pyramid Network for Multi-Person Pose Estimation Yilun Chen Zhicheng Wang Yuxiang Peng 1 Zhiqiang Zhang 2 Gang Yu Jian Sun 1 Tsinghua University 2 HuaZhong University of Science and Technology
Cascaded Pyramid Network for Multi-Person Pose Estimation Yilun Chen Zhicheng Wang Yuxiang Peng 1 Zhiqiang Zhang 2 Gang Yu Jian Sun 1 Tsinghua University 2 HuaZhong University of Science and Technology
A Cascaded Inception of Inception Network with Attention Modulated Feature Fusion for Human Pose Estimation
 A Cascaded Inception of Inception Network with Attention Modulated Feature Fusion for Human Pose Estimation Submission ID: 2065 Abstract Accurate keypoint localization of human pose needs diversified features:
A Cascaded Inception of Inception Network with Attention Modulated Feature Fusion for Human Pose Estimation Submission ID: 2065 Abstract Accurate keypoint localization of human pose needs diversified features:
Object Detection by 3D Aspectlets and Occlusion Reasoning
 Object Detection by 3D Aspectlets and Occlusion Reasoning Yu Xiang University of Michigan Silvio Savarese Stanford University In the 4th International IEEE Workshop on 3D Representation and Recognition
Object Detection by 3D Aspectlets and Occlusion Reasoning Yu Xiang University of Michigan Silvio Savarese Stanford University In the 4th International IEEE Workshop on 3D Representation and Recognition
Articulated Pose Estimation by a Graphical Model with Image Dependent Pairwise Relations
 Articulated Pose Estimation by a Graphical Model with Image Dependent Pairwise Relations Xianjie Chen University of California, Los Angeles Los Angeles, CA 90024 cxj@ucla.edu Alan Yuille University of
Articulated Pose Estimation by a Graphical Model with Image Dependent Pairwise Relations Xianjie Chen University of California, Los Angeles Los Angeles, CA 90024 cxj@ucla.edu Alan Yuille University of
Detecting and Parsing of Visual Objects: Humans and Animals. Alan Yuille (UCLA)
") Detecting and Parsing of Visual Objects: Humans and Animals Alan Yuille (UCLA) Summary This talk describes recent work on detection and parsing visual objects. The methods represent objects in terms of
Detecting and Parsing of Visual Objects: Humans and Animals Alan Yuille (UCLA) Summary This talk describes recent work on detection and parsing visual objects. The methods represent objects in terms of
Mask R-CNN. presented by Jiageng Zhang, Jingyao Zhan, Yunhan Ma
 Mask R-CNN presented by Jiageng Zhang, Jingyao Zhan, Yunhan Ma Mask R-CNN Background Related Work Architecture Experiment Mask R-CNN Background Related Work Architecture Experiment Background From left
Mask R-CNN presented by Jiageng Zhang, Jingyao Zhan, Yunhan Ma Mask R-CNN Background Related Work Architecture Experiment Mask R-CNN Background Related Work Architecture Experiment Background From left
Pose Machines: Articulated Pose Estimation via Inference Machines
 Pose Machines: Articulated Pose Estimation via Inference Machines Varun Ramakrishna, Daniel Munoz, Martial Hebert, James Andrew Bagnell, and Yaser Sheikh The Robotics Institute, Carnegie Mellon University,
Pose Machines: Articulated Pose Estimation via Inference Machines Varun Ramakrishna, Daniel Munoz, Martial Hebert, James Andrew Bagnell, and Yaser Sheikh The Robotics Institute, Carnegie Mellon University,
Object Detection with Partial Occlusion Based on a Deformable Parts-Based Model
 Object Detection with Partial Occlusion Based on a Deformable Parts-Based Model Johnson Hsieh (johnsonhsieh@gmail.com), Alexander Chia (alexchia@stanford.edu) Abstract -- Object occlusion presents a major
Object Detection with Partial Occlusion Based on a Deformable Parts-Based Model Johnson Hsieh (johnsonhsieh@gmail.com), Alexander Chia (alexchia@stanford.edu) Abstract -- Object occlusion presents a major
Deeply Learned Compositional Models for Human Pose Estimation
 Deeply Learned Compositional Models for Human Pose Estimation Wei Tang, Pei Yu and Ying Wu Northwestern University 2145 Sheridan Road, Evanston, IL 60208 {wtt450, pyi980, yingwu}@eecs.northwestern.edu
Deeply Learned Compositional Models for Human Pose Estimation Wei Tang, Pei Yu and Ying Wu Northwestern University 2145 Sheridan Road, Evanston, IL 60208 {wtt450, pyi980, yingwu}@eecs.northwestern.edu
Strong Appearance and Expressive Spatial Models for Human Pose Estimation
 2013 IEEE International Conference on Computer Vision Strong Appearance and Expressive Spatial Models for Human Pose Estimation Leonid Pishchulin 1 Mykhaylo Andriluka 1 Peter Gehler 2 Bernt Schiele 1 1
2013 IEEE International Conference on Computer Vision Strong Appearance and Expressive Spatial Models for Human Pose Estimation Leonid Pishchulin 1 Mykhaylo Andriluka 1 Peter Gehler 2 Bernt Schiele 1 1
3D Pose Estimation from a Single Monocular Image
 COMPUTER GRAPHICS TECHNICAL REPORTS CG-2015-1 arxiv:1509.06720v1 [cs.cv] 22 Sep 2015 3D Pose Estimation from a Single Monocular Image Hashim Yasin yasin@cs.uni-bonn.de Institute of Computer Science II
COMPUTER GRAPHICS TECHNICAL REPORTS CG-2015-1 arxiv:1509.06720v1 [cs.cv] 22 Sep 2015 3D Pose Estimation from a Single Monocular Image Hashim Yasin yasin@cs.uni-bonn.de Institute of Computer Science II
Stereo Human Keypoint Estimation
 Stereo Human Keypoint Estimation Kyle Brown Stanford University Stanford Intelligent Systems Laboratory kjbrown7@stanford.edu Abstract The goal of this project is to accurately estimate human keypoint
Stereo Human Keypoint Estimation Kyle Brown Stanford University Stanford Intelligent Systems Laboratory kjbrown7@stanford.edu Abstract The goal of this project is to accurately estimate human keypoint
Supplementary Material Estimating Correspondences of Deformable Objects In-the-wild
 Supplementary Material Estimating Correspondences of Deformable Objects In-the-wild Yuxiang Zhou Epameinondas Antonakos Joan Alabort-i-Medina Anastasios Roussos Stefanos Zafeiriou, Department of Computing,
Supplementary Material Estimating Correspondences of Deformable Objects In-the-wild Yuxiang Zhou Epameinondas Antonakos Joan Alabort-i-Medina Anastasios Roussos Stefanos Zafeiriou, Department of Computing,
Articulated Pose Estimation with Flexible Mixtures-of-Parts
 Articulated Pose Estimation with Flexible Mixtures-of-Parts PRESENTATION: JESSE DAVIS CS 3710 VISUAL RECOGNITION Outline Modeling Special Cases Inferences Learning Experiments Problem and Relevance Problem:
Articulated Pose Estimation with Flexible Mixtures-of-Parts PRESENTATION: JESSE DAVIS CS 3710 VISUAL RECOGNITION Outline Modeling Special Cases Inferences Learning Experiments Problem and Relevance Problem:
Spatial Localization and Detection. Lecture 8-1
 Lecture 8: Spatial Localization and Detection Lecture 8-1 Administrative - Project Proposals were due on Saturday Homework 2 due Friday 2/5 Homework 1 grades out this week Midterm will be in-class on Wednesday
Lecture 8: Spatial Localization and Detection Lecture 8-1 Administrative - Project Proposals were due on Saturday Homework 2 due Friday 2/5 Homework 1 grades out this week Midterm will be in-class on Wednesday
Joint Multi-Person Pose Estimation and Semantic Part Segmentation
 Joint Multi-Person Pose Estimation and Semantic Part Segmentation Fangting Xia 1 Peng Wang 1 Xianjie Chen 1 Alan Yuille 2 sukixia@gmail.com pengwangpku2012@gmail.com cxj@ucla.edu alan.yuille@jhu.edu 1
Joint Multi-Person Pose Estimation and Semantic Part Segmentation Fangting Xia 1 Peng Wang 1 Xianjie Chen 1 Alan Yuille 2 sukixia@gmail.com pengwangpku2012@gmail.com cxj@ucla.edu alan.yuille@jhu.edu 1
Deformable Part Models
 CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
Clustered Pose and Nonlinear Appearance Models for Human Pose Estimation
 JOHNSON, EVERINGHAM: CLUSTERED MODELS FOR HUMAN POSE ESTIMATION 1 Clustered Pose and Nonlinear Appearance Models for Human Pose Estimation Sam Johnson s.a.johnson04@leeds.ac.uk Mark Everingham m.everingham@leeds.ac.uk
JOHNSON, EVERINGHAM: CLUSTERED MODELS FOR HUMAN POSE ESTIMATION 1 Clustered Pose and Nonlinear Appearance Models for Human Pose Estimation Sam Johnson s.a.johnson04@leeds.ac.uk Mark Everingham m.everingham@leeds.ac.uk
A Cascaded Inception of Inception Network with Attention Modulated Feature Fusion for Human Pose Estimation
 The Thirty-Second AAAI Conference on Artificial Intelligence (AAAI-18) A Cascaded Inception of Inception Network with Attention Modulated Feature Fusion for Human Pose Estimation Wentao Liu, 1,2 Jie Chen,
The Thirty-Second AAAI Conference on Artificial Intelligence (AAAI-18) A Cascaded Inception of Inception Network with Attention Modulated Feature Fusion for Human Pose Estimation Wentao Liu, 1,2 Jie Chen,
Poselet Conditioned Pictorial Structures
 Poselet Conditioned Pictorial Structures Leonid Pishchulin 1 Mykhaylo Andriluka 1 Peter Gehler 2 Bernt Schiele 1 1 Max Planck Institute for Informatics, Saarbrücken, Germany 2 Max Planck Institute for
Poselet Conditioned Pictorial Structures Leonid Pishchulin 1 Mykhaylo Andriluka 1 Peter Gehler 2 Bernt Schiele 1 1 Max Planck Institute for Informatics, Saarbrücken, Germany 2 Max Planck Institute for
End-to-End Learning of Deformable Mixture of Parts and Deep Convolutional Neural Networks for Human Pose Estimation
 End-to-End Learning of Deformable Mixture of Parts and Deep Convolutional Neural Networks for Human Pose Estimation Wei Yang Wanli Ouyang Hongsheng Li Xiaogang Wang Department of Electronic Engineering,
End-to-End Learning of Deformable Mixture of Parts and Deep Convolutional Neural Networks for Human Pose Estimation Wei Yang Wanli Ouyang Hongsheng Li Xiaogang Wang Department of Electronic Engineering,
arxiv: v2 [cs.cv] 26 Jul 2016
![arxiv: v2 [cs.cv] 26 Jul 2016](/thumbs/73/69426640.jpg "arxiv: v2 [cs.cv] 26 Jul 2016") arxiv:1603.06937v2 [cs.cv] 26 Jul 2016 Stacked Hourglass Networks for Human Pose Estimation Alejandro Newell, Kaiyu Yang, and Jia Deng University of Michigan, Ann Arbor {alnewell,yangky,jiadeng}@umich.edu
arxiv:1603.06937v2 [cs.cv] 26 Jul 2016 Stacked Hourglass Networks for Human Pose Estimation Alejandro Newell, Kaiyu Yang, and Jia Deng University of Michigan, Ann Arbor {alnewell,yangky,jiadeng}@umich.edu
Actions and Attributes from Wholes and Parts
 Actions and Attributes from Wholes and Parts Georgia Gkioxari UC Berkeley gkioxari@berkeley.edu Ross Girshick Microsoft Research rbg@microsoft.com Jitendra Malik UC Berkeley malik@berkeley.edu Abstract
Actions and Attributes from Wholes and Parts Georgia Gkioxari UC Berkeley gkioxari@berkeley.edu Ross Girshick Microsoft Research rbg@microsoft.com Jitendra Malik UC Berkeley malik@berkeley.edu Abstract
Human Pose Estimation using Body Parts Dependent Joint Regressors
 2013 IEEE Conference on Computer Vision and Pattern Recognition Human Pose Estimation using Body Parts Dependent Joint Regressors Matthias Dantone 1 Juergen Gall 2 Christian Leistner 3 Luc Van Gool 1 ETH
2013 IEEE Conference on Computer Vision and Pattern Recognition Human Pose Estimation using Body Parts Dependent Joint Regressors Matthias Dantone 1 Juergen Gall 2 Christian Leistner 3 Luc Van Gool 1 ETH
Multi-Context Attention for Human Pose Estimation
 Multi-Context Attention for Human Pose Estimation Xiao Chu Wei Yang Wanli Ouyang,4 Cheng Ma 2 Alan L. Yuille Xiaogang Wang The Chinese University of Hong Kong, Hong Kong SAR, China 2 Tsinghua University,
Multi-Context Attention for Human Pose Estimation Xiao Chu Wei Yang Wanli Ouyang,4 Cheng Ma 2 Alan L. Yuille Xiaogang Wang The Chinese University of Hong Kong, Hong Kong SAR, China 2 Tsinghua University,
Yiqi Yan. May 10, 2017
 Yiqi Yan May 10, 2017 P a r t I F u n d a m e n t a l B a c k g r o u n d s Convolution Single Filter Multiple Filters 3 Convolution: case study, 2 filters 4 Convolution: receptive field receptive field
Yiqi Yan May 10, 2017 P a r t I F u n d a m e n t a l B a c k g r o u n d s Convolution Single Filter Multiple Filters 3 Convolution: case study, 2 filters 4 Convolution: receptive field receptive field
Benchmarking and Error Diagnosis in Multi-Instance Pose Estimation
 Benchmarking and Error Diagnosis in Multi-Instance Pose Estimation Matteo Ruggero Ronchi Pietro Perona www.vision.caltech.edu/ mronchi perona@caltech.edu California Institute of Technology, Pasadena, CA,
Benchmarking and Error Diagnosis in Multi-Instance Pose Estimation Matteo Ruggero Ronchi Pietro Perona www.vision.caltech.edu/ mronchi perona@caltech.edu California Institute of Technology, Pasadena, CA,
arxiv: v2 [cs.cv] 17 Sep 2014
![arxiv: v2 [cs.cv] 17 Sep 2014](/thumbs/75/71955018.jpg "arxiv: v2 [cs.cv] 17 Sep 2014") Joint Training of a Convolutional Network and a Graphical Model for Human Pose Estimation arxiv:16.2984v2 [cs.cv] 17 Sep 14 Jonathan Tompson, Arjun Jain, Yann LeCun, Christoph Bregler New York University
Joint Training of a Convolutional Network and a Graphical Model for Human Pose Estimation arxiv:16.2984v2 [cs.cv] 17 Sep 14 Jonathan Tompson, Arjun Jain, Yann LeCun, Christoph Bregler New York University
Human Pose Estimation with Deep Learning. Wei Yang
 Human Pose Estimation with Deep Learning Wei Yang Applications Understand Activities Family Robots American Heist (2014) - The Bank Robbery Scene 2 What do we need to know to recognize a crime scene? 3
Human Pose Estimation with Deep Learning Wei Yang Applications Understand Activities Family Robots American Heist (2014) - The Bank Robbery Scene 2 What do we need to know to recognize a crime scene? 3
Computer Vision Lecture 16
 Announcements Computer Vision Lecture 16 Deep Learning Applications 11.01.2017 Seminar registration period starts on Friday We will offer a lab course in the summer semester Deep Robot Learning Topic:
Announcements Computer Vision Lecture 16 Deep Learning Applications 11.01.2017 Seminar registration period starts on Friday We will offer a lab course in the summer semester Deep Robot Learning Topic:
Computer Vision Lecture 16
 Computer Vision Lecture 16 Deep Learning Applications 11.01.2017 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar registration period starts
Computer Vision Lecture 16 Deep Learning Applications 11.01.2017 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar registration period starts
2. Related Work. show the improvement by using an architecture with multi-scale supervision and fusion for joint detection.
 Human Pose Estimation using Global and Local Normalization Ke Sun 1, Cuiling Lan 2, Junliang Xing 3, Wenjun Zeng 2, Dong Liu 1, Jingdong Wang 2 1 3 Universit of Science and Technolog of China, Anhui, China
Human Pose Estimation using Global and Local Normalization Ke Sun 1, Cuiling Lan 2, Junliang Xing 3, Wenjun Zeng 2, Dong Liu 1, Jingdong Wang 2 1 3 Universit of Science and Technolog of China, Anhui, China
Pose Proposal Networks
 Pose Proposal Networks Taiki Sekii [0000 0002 1895 3075] Konica Minolta, Inc. taiki.sekii@konicaminolta.com Abstract. We propose a novel method to detect an unknown number of articulated 2D poses in real
Pose Proposal Networks Taiki Sekii [0000 0002 1895 3075] Konica Minolta, Inc. taiki.sekii@konicaminolta.com Abstract. We propose a novel method to detect an unknown number of articulated 2D poses in real
Part-Based Models for Object Class Recognition Part 2
 High Level Computer Vision Part-Based Models for Object Class Recognition Part 2 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de https://www.mpi-inf.mpg.de/hlcv Class of Object
High Level Computer Vision Part-Based Models for Object Class Recognition Part 2 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de https://www.mpi-inf.mpg.de/hlcv Class of Object
Part-Based Models for Object Class Recognition Part 2
 High Level Computer Vision Part-Based Models for Object Class Recognition Part 2 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de https://www.mpi-inf.mpg.de/hlcv Class of Object
High Level Computer Vision Part-Based Models for Object Class Recognition Part 2 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de https://www.mpi-inf.mpg.de/hlcv Class of Object
PEDESTRIAN DETECTION IN CROWDED SCENES VIA SCALE AND OCCLUSION ANALYSIS
 PEDESTRIAN DETECTION IN CROWDED SCENES VIA SCALE AND OCCLUSION ANALYSIS Lu Wang Lisheng Xu Ming-Hsuan Yang Northeastern University, China University of California at Merced, USA ABSTRACT Despite significant
PEDESTRIAN DETECTION IN CROWDED SCENES VIA SCALE AND OCCLUSION ANALYSIS Lu Wang Lisheng Xu Ming-Hsuan Yang Northeastern University, China University of California at Merced, USA ABSTRACT Despite significant
Supplementary Material: Unconstrained Salient Object Detection via Proposal Subset Optimization
 Supplementary Material: Unconstrained Salient Object via Proposal Subset Optimization 1. Proof of the Submodularity According to Eqns. 10-12 in our paper, the objective function of the proposed optimization
Supplementary Material: Unconstrained Salient Object via Proposal Subset Optimization 1. Proof of the Submodularity According to Eqns. 10-12 in our paper, the objective function of the proposed optimization
arxiv: v1 [cs.cv] 29 Sep 2016
![arxiv: v1 [cs.cv] 29 Sep 2016](/thumbs/76/73787064.jpg "arxiv: v1 [cs.cv] 29 Sep 2016") arxiv:1609.09545v1 [cs.cv] 29 Sep 2016 Two-stage Convolutional Part Heatmap Regression for the 1st 3D Face Alignment in the Wild (3DFAW) Challenge Adrian Bulat and Georgios Tzimiropoulos Computer Vision
arxiv:1609.09545v1 [cs.cv] 29 Sep 2016 Two-stage Convolutional Part Heatmap Regression for the 1st 3D Face Alignment in the Wild (3DFAW) Challenge Adrian Bulat and Georgios Tzimiropoulos Computer Vision
Test-time Adaptation for 3D Human Pose Estimation
 Test-time Adaptation for 3D Human Pose Estimation Sikandar Amin,2, Philipp Müller 2, Andreas Bulling 2, and Mykhaylo Andriluka 2,3 Technische Universität München, Germany 2 Max Planck Institute for Informatics,
Test-time Adaptation for 3D Human Pose Estimation Sikandar Amin,2, Philipp Müller 2, Andreas Bulling 2, and Mykhaylo Andriluka 2,3 Technische Universität München, Germany 2 Max Planck Institute for Informatics,
Part-Based Models for Object Class Recognition Part 3
 High Level Computer Vision! Part-Based Models for Object Class Recognition Part 3 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de! http://www.d2.mpi-inf.mpg.de/cv ! State-of-the-Art
High Level Computer Vision! Part-Based Models for Object Class Recognition Part 3 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de! http://www.d2.mpi-inf.mpg.de/cv ! State-of-the-Art
Finding Tiny Faces Supplementary Materials
 Finding Tiny Faces Supplementary Materials Peiyun Hu, Deva Ramanan Robotics Institute Carnegie Mellon University {peiyunh,deva}@cs.cmu.edu 1. Error analysis Quantitative analysis We plot the distribution
Finding Tiny Faces Supplementary Materials Peiyun Hu, Deva Ramanan Robotics Institute Carnegie Mellon University {peiyunh,deva}@cs.cmu.edu 1. Error analysis Quantitative analysis We plot the distribution
Fully Convolutional Networks for Semantic Segmentation
 Fully Convolutional Networks for Semantic Segmentation Jonathan Long* Evan Shelhamer* Trevor Darrell UC Berkeley Chaim Ginzburg for Deep Learning seminar 1 Semantic Segmentation Define a pixel-wise labeling
Fully Convolutional Networks for Semantic Segmentation Jonathan Long* Evan Shelhamer* Trevor Darrell UC Berkeley Chaim Ginzburg for Deep Learning seminar 1 Semantic Segmentation Define a pixel-wise labeling
CAP 6412 Advanced Computer Vision
 CAP 6412 Advanced Computer Vision http://www.cs.ucf.edu/~bgong/cap6412.html Boqing Gong April 21st, 2016 Today Administrivia Free parameters in an approach, model, or algorithm? Egocentric videos by Aisha
CAP 6412 Advanced Computer Vision http://www.cs.ucf.edu/~bgong/cap6412.html Boqing Gong April 21st, 2016 Today Administrivia Free parameters in an approach, model, or algorithm? Egocentric videos by Aisha
Progress in Computer Vision in the Last Decade & Open Problems: People Detection & Human Pose Estimation
 Progress in Computer Vision in the Last Decade & Open Problems: People Detection & Human Pose Estimation Bernt Schiele Max Planck Institute for Informatics & Saarland University, Saarland Informatics Campus
Progress in Computer Vision in the Last Decade & Open Problems: People Detection & Human Pose Estimation Bernt Schiele Max Planck Institute for Informatics & Saarland University, Saarland Informatics Campus
Jointly Optimize Data Augmentation and Network Training: Adversarial Data Augmentation in Human Pose Estimation
 Jointly Optimize Data Augmentation and Network Training: Adversarial Data Augmentation in Human Pose Estimation Xi Peng * Rutgers University px@cs.rutgers.edu Zhiqiang Tang * Rutgers University zt53@cs.rutgers.edu
Jointly Optimize Data Augmentation and Network Training: Adversarial Data Augmentation in Human Pose Estimation Xi Peng * Rutgers University px@cs.rutgers.edu Zhiqiang Tang * Rutgers University zt53@cs.rutgers.edu
arxiv: v1 [cs.cv] 11 Jul 2018
![arxiv: v1 [cs.cv] 11 Jul 2018](/thumbs/87/96473743.jpg "arxiv: v1 [cs.cv] 11 Jul 2018") arxiv:1807.04067v1 [cs.cv] 11 Jul 2018 MultiPoseNet: Fast Multi-Person Pose Estimation using Pose Residual Network Muhammed Kocabas 1, M. Salih Karagoz 1, Emre Akbas 1 1 Department of Computer Engineering,
arxiv:1807.04067v1 [cs.cv] 11 Jul 2018 MultiPoseNet: Fast Multi-Person Pose Estimation using Pose Residual Network Muhammed Kocabas 1, M. Salih Karagoz 1, Emre Akbas 1 1 Department of Computer Engineering,
arxiv: v1 [cs.cv] 20 Nov 2015
![arxiv: v1 [cs.cv] 20 Nov 2015](/thumbs/86/93845035.jpg "arxiv: v1 [cs.cv] 20 Nov 2015") Personalizing Human Video Pose Estimation arxiv:1511.6676v1 [cs.cv] 2 Nov 215 James Charles University of Leeds j.charles@leeds.ac.uk Abstract David Hogg University of Leeds d.c.hogg@leeds.ac.uk We propose
Personalizing Human Video Pose Estimation arxiv:1511.6676v1 [cs.cv] 2 Nov 215 James Charles University of Leeds j.charles@leeds.ac.uk Abstract David Hogg University of Leeds d.c.hogg@leeds.ac.uk We propose
Structured Models in. Dan Huttenlocher. June 2010
 Structured Models in Computer Vision i Dan Huttenlocher June 2010 Structured Models Problems where output variables are mutually dependent or constrained E.g., spatial or temporal relations Such dependencies
Structured Models in Computer Vision i Dan Huttenlocher June 2010 Structured Models Problems where output variables are mutually dependent or constrained E.g., spatial or temporal relations Such dependencies
Lecture 5: Object Detection
 Object Detection CSED703R: Deep Learning for Visual Recognition (2017F) Lecture 5: Object Detection Bohyung Han Computer Vision Lab. bhhan@postech.ac.kr 2 Traditional Object Detection Algorithms Region-based
Object Detection CSED703R: Deep Learning for Visual Recognition (2017F) Lecture 5: Object Detection Bohyung Han Computer Vision Lab. bhhan@postech.ac.kr 2 Traditional Object Detection Algorithms Region-based
Multi-view Body Part Recognition with Random Forests
 KAZEMI, BURENIUS, AZIZPOUR, SULLIVAN: MULTI-VIEW BODY PART RECOGNITION 1 Multi-view Body Part Recognition with Random Forests Vahid Kazemi vahidk@csc.kth.se Magnus Burenius burenius@csc.kth.se Hossein
KAZEMI, BURENIUS, AZIZPOUR, SULLIVAN: MULTI-VIEW BODY PART RECOGNITION 1 Multi-view Body Part Recognition with Random Forests Vahid Kazemi vahidk@csc.kth.se Magnus Burenius burenius@csc.kth.se Hossein
arxiv: v1 [cs.cv] 18 Sep 2017
![arxiv: v1 [cs.cv] 18 Sep 2017](/thumbs/79/79363460.jpg "arxiv: v1 [cs.cv] 18 Sep 2017") Multi-Person Pose Estimation via Column Generation Shaofei Wang Beijing A&E Technologies sfwang0928@gmail.com Chong Zhang SIMBioSys Group, DTIC, Universitat Pompeu Fabra Barcelona Spain chong.zhang@upf.edu
Multi-Person Pose Estimation via Column Generation Shaofei Wang Beijing A&E Technologies sfwang0928@gmail.com Chong Zhang SIMBioSys Group, DTIC, Universitat Pompeu Fabra Barcelona Spain chong.zhang@upf.edu
Supplementary Material: Pixelwise Instance Segmentation with a Dynamically Instantiated Network
 Supplementary Material: Pixelwise Instance Segmentation with a Dynamically Instantiated Network Anurag Arnab and Philip H.S. Torr University of Oxford {anurag.arnab, philip.torr}@eng.ox.ac.uk 1. Introduction
Supplementary Material: Pixelwise Instance Segmentation with a Dynamically Instantiated Network Anurag Arnab and Philip H.S. Torr University of Oxford {anurag.arnab, philip.torr}@eng.ox.ac.uk 1. Introduction
Multiple-Person Tracking by Detection
 http://excel.fit.vutbr.cz Multiple-Person Tracking by Detection Jakub Vojvoda* Abstract Detection and tracking of multiple person is challenging problem mainly due to complexity of scene and large intra-class
http://excel.fit.vutbr.cz Multiple-Person Tracking by Detection Jakub Vojvoda* Abstract Detection and tracking of multiple person is challenging problem mainly due to complexity of scene and large intra-class
Detecting Actions, Poses, and Objects with Relational Phraselets
 Detecting Actions, Poses, and Objects with Relational Phraselets Chaitanya Desai and Deva Ramanan University of California at Irvine, Irvine CA, USA {desaic,dramanan}@ics.uci.edu Abstract. We present a
Detecting Actions, Poses, and Objects with Relational Phraselets Chaitanya Desai and Deva Ramanan University of California at Irvine, Irvine CA, USA {desaic,dramanan}@ics.uci.edu Abstract. We present a
arxiv: v1 [cs.cv] 31 Mar 2016
![arxiv: v1 [cs.cv] 31 Mar 2016](/thumbs/92/108399479.jpg "arxiv: v1 [cs.cv] 31 Mar 2016") Object Boundary Guided Semantic Segmentation Qin Huang, Chunyang Xia, Wenchao Zheng, Yuhang Song, Hao Xu and C.-C. Jay Kuo arxiv:1603.09742v1 [cs.cv] 31 Mar 2016 University of Southern California Abstract.
Object Boundary Guided Semantic Segmentation Qin Huang, Chunyang Xia, Wenchao Zheng, Yuhang Song, Hao Xu and C.-C. Jay Kuo arxiv:1603.09742v1 [cs.cv] 31 Mar 2016 University of Southern California Abstract.
arxiv: v1 [cs.cv] 27 Mar 2016
![arxiv: v1 [cs.cv] 27 Mar 2016](/thumbs/76/74332416.jpg "arxiv: v1 [cs.cv] 27 Mar 2016") arxiv:1603.08212v1 [cs.cv] 27 Mar 2016 Human Pose Estimation using Deep Consensus Voting Ita Lifshitz, Ethan Fetaya and Shimon Ullman Weizmann Institute of Science Abstract In this paper we consider the
arxiv:1603.08212v1 [cs.cv] 27 Mar 2016 Human Pose Estimation using Deep Consensus Voting Ita Lifshitz, Ethan Fetaya and Shimon Ullman Weizmann Institute of Science Abstract In this paper we consider the
HUMAN PARSING WITH A CASCADE OF HIERARCHICAL POSELET BASED PRUNERS
 HUMAN PARSING WITH A CASCADE OF HIERARCHICAL POSELET BASED PRUNERS Duan Tran Yang Wang David Forsyth University of Illinois at Urbana Champaign University of Manitoba ABSTRACT We address the problem of
HUMAN PARSING WITH A CASCADE OF HIERARCHICAL POSELET BASED PRUNERS Duan Tran Yang Wang David Forsyth University of Illinois at Urbana Champaign University of Manitoba ABSTRACT We address the problem of
Exploring the Spatial Hierarchy of Mixture Models for Human Pose Estimation
 Exploring the Spatial Hierarchy of Mixture Models for Human Pose Estimation Yuandong Tian 1, C. Lawrence Zitnick 2, and Srinivasa G. Narasimhan 1 1 Carnegie Mellon University, 5000 Forbes Ave, Pittsburgh,
Exploring the Spatial Hierarchy of Mixture Models for Human Pose Estimation Yuandong Tian 1, C. Lawrence Zitnick 2, and Srinivasa G. Narasimhan 1 1 Carnegie Mellon University, 5000 Forbes Ave, Pittsburgh,
Learning and Inferring Depth from Monocular Images. Jiyan Pan April 1, 2009
 Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material
 DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material Yi Li 1, Gu Wang 1, Xiangyang Ji 1, Yu Xiang 2, and Dieter Fox 2 1 Tsinghua University, BNRist 2 University of Washington
DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material Yi Li 1, Gu Wang 1, Xiangyang Ji 1, Yu Xiang 2, and Dieter Fox 2 1 Tsinghua University, BNRist 2 University of Washington
DPM Configurations for Human Interaction Detection
 DPM Configurations for Human Interaction Detection Coert van Gemeren Ronald Poppe Remco C. Veltkamp Interaction Technology Group, Department of Information and Computing Sciences, Utrecht University, The
DPM Configurations for Human Interaction Detection Coert van Gemeren Ronald Poppe Remco C. Veltkamp Interaction Technology Group, Department of Information and Computing Sciences, Utrecht University, The
Articulated Pose Estimation using Discriminative Armlet Classifiers
 Articulated Pose Estimation using Discriminative Armlet Classifiers Georgia Gkioxari 1, Pablo Arbeláez 1, Lubomir Bourdev 2 and Jitendra Malik 1 1 University of California, Berkeley - Berkeley, CA 94720
Articulated Pose Estimation using Discriminative Armlet Classifiers Georgia Gkioxari 1, Pablo Arbeláez 1, Lubomir Bourdev 2 and Jitendra Malik 1 1 University of California, Berkeley - Berkeley, CA 94720
Pose Estimation on Depth Images with Convolutional Neural Network
 Pose Estimation on Depth Images with Convolutional Neural Network Jingwei Huang Stanford University jingweih@stanford.edu David Altamar Stanford University daltamar@stanford.edu Abstract In this paper
Pose Estimation on Depth Images with Convolutional Neural Network Jingwei Huang Stanford University jingweih@stanford.edu David Altamar Stanford University daltamar@stanford.edu Abstract In this paper
Category-level localization
 Category-level localization Cordelia Schmid Recognition Classification Object present/absent in an image Often presence of a significant amount of background clutter Localization / Detection Localize object
Category-level localization Cordelia Schmid Recognition Classification Object present/absent in an image Often presence of a significant amount of background clutter Localization / Detection Localize object