Articulated Pose Estimation with Flexible Mixtures-of-Parts
|
|
|
- Stella Casey
- 6 years ago
- Views:
Transcription
1 Articulated Pose Estimation with Flexible Mixtures-of-Parts PRESENTATION: JESSE DAVIS CS 3710 VISUAL RECOGNITION
2 Outline Modeling Special Cases Inferences Learning Experiments
3 Problem and Relevance Problem: Difficult to capture-identify different poses of the human body Relevance: Improvements in pose-recognition can assist with many modern applications
4 Challenges and Previous Approaches Challenges: Many degrees of freedom with relation to joints Limbs can vary in appearance (clothes, body shape, camera orientation, etc.) Translate method from static image to video Previous Approaches: Tree approaches have been primarily used with different approaches to tackle the double-counting phenomena

5 Approach Object recognition to retrieve bounding boxes Bounding boxes on different parts of body Label the bounding boxes
6 Step by Step Approach Define the model (as well as special cases) Infer parts based on model Supervised learning
7 Defining the Model Label parts of a model, as well as orientation Score specific configurations of parts using: Sum 1: local score of template for part i for type t at location p Sum 2: switching model for scoring paired types φ(i, p i ): feature vector for pixel p i S t : Compatibility score for parts ψ p i p j = dx dx 2 dy dy 2 : dx = x i x j relative location of i to j, relative to pixel grid
8 Learning Supervised learning Given labeled (+/-) examples, define a prediction objective function: Positive examples scores: >1 Negative examples' scores: <-1
9 Learning... Prior models: Score high on ground-truth poses Score low on alternate poses Paper's model: Score high on ground-truth poses (Assuming) Decent score on alternate poses Low score on people-less images

10 Learning...
11 Experiments Datasets: Image Parse Dataset Buffy Dataset (and subset) Metrics: Number of mixtures/types Number of parts Alt. Methods: Rigid HOG Mixture of Definition by Parts Additional methods detailed in their respective papers
12 Datasets Parse: 305 pose-annotated images of detailed full body poses Buffy: 748 pose-annotated video frames sampled from 5 episodes

13 Metrics Number of Mixtures/Types Number of Parts 2 setups used: 14 part model and 27 part model
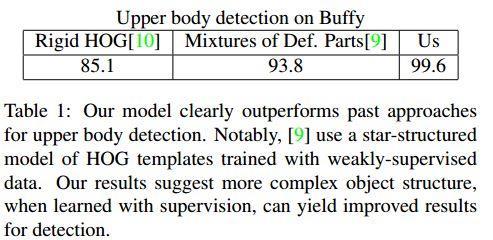
14 Results

15 Results...

16 Results...
17 High Level Summary Supervised Learning for a Model Utilizes Pose Estimation AND Pose Detection Label a Model Score model based on co-occurrence Maximize model score
18 Discussion Strengths/Weaknesses of Approach Ideas for Improvement Weaknesses of Experiment Other methods for video application
19 Real-Time Human Pose Recognition in Parts from Single Depth Images PRESENTATION: JESSE DAVIS CS 3710 VISUAL RECOGNITION
20 Outline Data Gathering Real Data vs Synthetic Data Body Part Inference and Joint Proposals Intermediate Body Parts Representation Depth image comparison and features Random Decision Forests/Trees Joint Positioning Experiments

21 Main Idea/Problem Addressed Real-time human pose recognition using consumer quality machine Invariance to: Shape Size Pose Clothing Etc.



22 Problem Relevance Provides opportunity for: monetary gain quality of life improvement improved machine-computer interaction Examples: Microsoft Kinect, Pedestrian Tracking, Computer- Interfaces
23 Challenges Human Body is capable of many different poses Need a way to generate many of these poses with different body shapes, scales, clothing types, etc. in mind Must decide how to identify parts of the body, and how detailed our labeling should be (i.e. leg vs. lower leg, knee, and upper leg) Backgrounds, light levels, color, and texture invariance
24 Previous Approaches Using Conventional Intensity Cameras (CPU expensive) Examine/learn an initial pose => Learn variations of that pose Estimate/search for locations of body segments from which to build the body Using Depth Cameras Base their search off of 3D models, divide the model into parts, base their search off of those parts
25 Their Approach Large and varied dataset Both synthetic and motion captured data Object Recognition Approach (by parts) Intermediate Body Part Representation Pose Estimation reduced to Per-Pixel Classification Create scored proposals of body joints
26 Data Gathering Depth Imaging Benefits Color and texture invariance Does well in low light levels Gives accurate scaling estimates Resolves silhouette ambiguity Background subtraction Creates a base for synthesizing additional depth images
























27 Data Types synthetic (train & test) real (test)
28 Real Data (Motion Capture Data) Large Database built using motion capture and human actions related to target application (dancing, running, etc.) Classifier expected to generalize unseen poses Wide range of poses vs. all possible combinations Many redundant poses are discarded based on initial data and furthest neighbor clustering 100k poses (frames) used s.t. no poses are within 5 cm of one another
29 Synthetic Data Goals: Realism and Variety Use of randomized rendering pipeline, which produces samples that are fully labeled and can be trained on Learning is used to provide invariance towards: camera pose, body pose, body size, and body shape Other slight variations accounted for: height, weight, mocap frame, camera noise, clothing, hairstyle
30 The Rendering Pipeline Necessary to account for pose variation and model variation Start with: Base Character and Pose Transform on: Rotation and Translation; Hair and Clothing; Weight and Height Variations; Camera Position and Orientation; Camera Noise Add transformations to dataset
31 Different Renderings
32 Rendering Pipeline... Steps: 1) Sample a set of parameters (randomly) 2) Render depth and body part images based on 3D meshes 3) Using Autodesk Motionbuilder, the mocap retargets to the base 15 meshes of the body s shapes and sizes 4) Further randomized variations to parameters (to expand pose coverage)
33 Body Part Labeling Body parts broken down into an intermediate body part representation of 31 body parts (object by parts) Observations: Parts should be small to enough to localize different body joints Parts should be small in numbers such that no classifier space is wasted
34 Depth Image Features For a given pixel x, the features are computed via: d I x : the depth at pixel x in Image θ = u, v : describes offsets u and v 1 d I (x) : ensures features are depth invariant

35 Depth Image Features...
36 Depth Image Features... Features are weak individually Solution: Combine with a decision forest Solution is efficient: One feature reads at most 3 image pixels Performs at most 5 arithmetic operations Can be implemented on a GPU
37 Toy example: distinguish left (L) and right (R) sides of the body no image window centred at x f(i, x; Δ 1 ) > θ 1 yes f(i, x; Δ 2 ) > θ 2 no yes P(c) L R P(c) P(c) L R L R
38 P n (c) body part c n Q n = (I, x) f(i, x; Δ n ) > θ n [Breiman et al. 84] for all pixels P l (c) c l no reduce entropy yes P r (c) r c Take (Δ, θ) that maximises information gain: ΔE = Q l Q n E(Q l ) Q r Q n E(Q r ) Goal: drive entropy at leaf nodes to zero
39 [Amit & Geman 97] [Breiman 01] [Geurts et al. 06] tree 1 (I, x) (I, x) tree T P T (c) P 1 (c) c Trained on different random subset of images bagging helps avoid over-fitting Average tree posteriors c P c I, x = 1 P T t (c I, x) t=1 T


40 Average per-class accuracy ground truth 55% 50% 45% inferred body parts (most likely) 1 tree 3 trees 6 trees 40% Number of trees
41 Randomized Decision Forests... Consist of T decision trees Split nodes: Have a feature f(θ) and threshold τ To classify pixel x from image I, you start at the root and evaluate equation (1), branching left or right according to the set t Leaf nodes: A learned distribution (left side of equation) of body part labels c is stored Distributions are averaged for all trees to give the final classification decision
42 Training using the decision forest Trees are trained on different sets of randomly synthesized images using the following algorithm:
43 Joint Position Proposal Body Part Recognition provides per-pixel information Must utilize this to generate reliable proposals for joint proposals Method: local mode-finding approach based on mean shift with a weighted Gaussian kernel Density estimator per body part equation: x : a coordinate in 3D space N: the number of image pixels w ic : pixel weighting x î : re-projection of image pixel x i into space given b c : learned per-part bandwidth
44 Joint Position Proposal... Pixel weighting w ic is defined by: Accounts for: Inferred Body Part Probability: P c I, x i World surface area of the pixel: d I x i 2


45 Define 3D world space density: 3D coord pixel weight 3D coord of i th pixel 1 2 pixel index i bandwidth inferred probability depth at i th pixel Mean shift for mode detection 3. hypothesize body joints
46 Joint Position Proposal (cont) Key Details: Density estimates are depth invariant (8) Depending on the application, inferred body parts can be pre-accumulated, e.g. multiple body parts over the same area can be merged to form a localized joint Mean shift finds modes efficiently Pixels above a selected learned probability curve are used for starting points of c (7, 8) Final joint estimate: sum of the pixel weights reaching their given mode
47 Experiments Test Data: Set of 5000 synthesized depth images (original poses used to generate are left out) Real dataset of 8808 frames from more than 15 different subjects Depth data from [13] (28 depth image sequences ranging from short motion to full actions)
48 Parameters and Metrics 3 trees, depth of 20, 300k training images/tree, 2000 training example pixels/image, 2000 candidate features (θ), 50 candidate thresholds (τ)/feature Quantification of classification and joint prediction accuracy Classification: average per-class accuracy (all body parts =) Joint Prediction: average precision per joint using mean avg precision
49 Joint Prediction Given a ground truth position: the first joint proposal within D meters (D = 0.1m) is assumed to be the true positive, while all others are false positives Joint proposals outside D are also false positives All proposals counted, not just confident ones Invisible joints not penalized
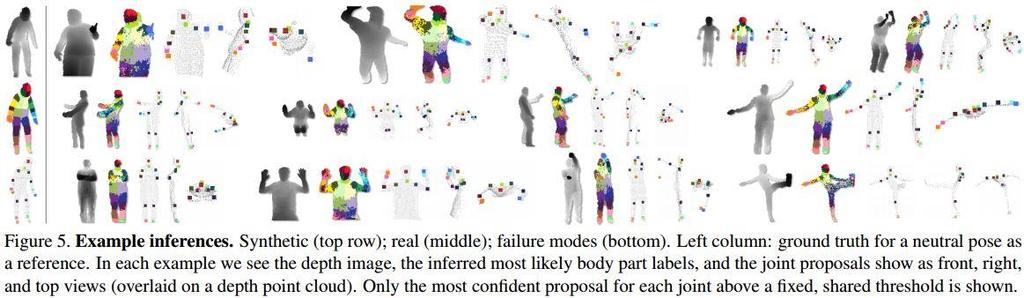
50 Qualitative Results
51 Classification Accuracy and Metrics Metrics: # of training images Synthesized silhouette images Depth of trees Max probe offset

52 Classification Accuracy and Metrics...
53 Joint Prediction Accuracy Comparisons Nearest Neighbor Comparison, two variants: Var. 1: matches ground truth test skeleton to training skeletons with translational alignment in 3D space (note: no access to test skeleton in practice) Var. 2: chamfer matching [14]: uses depth edges and 12 orientation bins
54 Joint Prediction Accuracy Comparisons... Versus [13] [13]: Uses body part proposals from [28] Tracks the skeleton with kinematic and temporal info. Data from time-of-flight depth camera This paper's algorithm has improved joint prediction (using AP), and runs at least 10x faster (no values given)

55 Joint Prediction Accuracy Comparisons...
56 Full Rotations and Multiple People Decrease in map, but was still able to achieve an impressive accuracy of 65.5% Trained on 900k images with full rotations, 5k synthetic images with full rotations
57 Discussion Improvements? Weaknesses? Applications? Future work?
58 Resources/References 1. Articulated Pose Estimation using Flexible Mixtures of Parts. Y. Yang and D. Ramanan. CVPR Real-Time Human Pose Recognition in Parts from a Single Depth Image. J. Shotton, A. Fitzgibbon, M. Cook, T. Sharp, M. Finocchio, R. Moore, A. Kipman, and A. Blake. CVPR Openc Dev Team. "Meanshift and Camshift." Meanshift and Camshift OpenCV dev Documentation. Openc Dev Team, n.d. Web. 20 Feb Random Decision Forests. Tin Kam Ho. 5. V. Lepetit, P. Lagger, and P. Fua. Randomized trees for real-time keypoint recognition. In Proc. CVPR, pages 2: , 2005.
Real-Time Human Pose Recognition in Parts from Single Depth Images
 Real-Time Human Pose Recognition in Parts from Single Depth Images Jamie Shotton, Andrew Fitzgibbon, Mat Cook, Toby Sharp, Mark Finocchio, Richard Moore, Alex Kipman, Andrew Blake CVPR 2011 PRESENTER:
Real-Time Human Pose Recognition in Parts from Single Depth Images Jamie Shotton, Andrew Fitzgibbon, Mat Cook, Toby Sharp, Mark Finocchio, Richard Moore, Alex Kipman, Andrew Blake CVPR 2011 PRESENTER:
Jamie Shotton, Andrew Fitzgibbon, Mat Cook, Toby Sharp, Mark Finocchio, Richard Moore, Alex Kipman, Andrew Blake CVPR 2011
 Jamie Shotton, Andrew Fitzgibbon, Mat Cook, Toby Sharp, Mark Finocchio, Richard Moore, Alex Kipman, Andrew Blake CVPR 2011 Auto-initialize a tracking algorithm & recover from failures All human poses,
Jamie Shotton, Andrew Fitzgibbon, Mat Cook, Toby Sharp, Mark Finocchio, Richard Moore, Alex Kipman, Andrew Blake CVPR 2011 Auto-initialize a tracking algorithm & recover from failures All human poses,
CS Decision Trees / Random Forests
 CS548 2015 Decision Trees / Random Forests Showcase by: Lily Amadeo, Bir B Kafle, Suman Kumar Lama, Cody Olivier Showcase work by Jamie Shotton, Andrew Fitzgibbon, Richard Moore, Mat Cook, Alex Kipman,
CS548 2015 Decision Trees / Random Forests Showcase by: Lily Amadeo, Bir B Kafle, Suman Kumar Lama, Cody Olivier Showcase work by Jamie Shotton, Andrew Fitzgibbon, Richard Moore, Mat Cook, Alex Kipman,
The Kinect Sensor. Luís Carriço FCUL 2014/15
 Advanced Interaction Techniques The Kinect Sensor Luís Carriço FCUL 2014/15 Sources: MS Kinect for Xbox 360 John C. Tang. Using Kinect to explore NUI, Ms Research, From Stanford CS247 Shotton et al. Real-Time
Advanced Interaction Techniques The Kinect Sensor Luís Carriço FCUL 2014/15 Sources: MS Kinect for Xbox 360 John C. Tang. Using Kinect to explore NUI, Ms Research, From Stanford CS247 Shotton et al. Real-Time
Human Body Recognition and Tracking: How the Kinect Works. Kinect RGB-D Camera. What the Kinect Does. How Kinect Works: Overview
 Human Body Recognition and Tracking: How the Kinect Works Kinect RGB-D Camera Microsoft Kinect (Nov. 2010) Color video camera + laser-projected IR dot pattern + IR camera $120 (April 2012) Kinect 1.5 due
Human Body Recognition and Tracking: How the Kinect Works Kinect RGB-D Camera Microsoft Kinect (Nov. 2010) Color video camera + laser-projected IR dot pattern + IR camera $120 (April 2012) Kinect 1.5 due
Key Developments in Human Pose Estimation for Kinect
 Key Developments in Human Pose Estimation for Kinect Pushmeet Kohli and Jamie Shotton Abstract The last few years have seen a surge in the development of natural user interfaces. These interfaces do not
Key Developments in Human Pose Estimation for Kinect Pushmeet Kohli and Jamie Shotton Abstract The last few years have seen a surge in the development of natural user interfaces. These interfaces do not
Background subtraction in people detection framework for RGB-D cameras
 Background subtraction in people detection framework for RGB-D cameras Anh-Tuan Nghiem, Francois Bremond INRIA-Sophia Antipolis 2004 Route des Lucioles, 06902 Valbonne, France nghiemtuan@gmail.com, Francois.Bremond@inria.fr
Background subtraction in people detection framework for RGB-D cameras Anh-Tuan Nghiem, Francois Bremond INRIA-Sophia Antipolis 2004 Route des Lucioles, 06902 Valbonne, France nghiemtuan@gmail.com, Francois.Bremond@inria.fr
Human Pose Estimation in Stereo Images
 Human Pose Estimation in Stereo Images Joe Lallemand 1,2, Magdalena Szczot 1, and Slobodan Ilic 2 1 BMW Group, Munich, Germany {joe.lallemand, magdalena.szczot}@bmw.de http://www.bmw.de 2 Computer Aided
Human Pose Estimation in Stereo Images Joe Lallemand 1,2, Magdalena Szczot 1, and Slobodan Ilic 2 1 BMW Group, Munich, Germany {joe.lallemand, magdalena.szczot}@bmw.de http://www.bmw.de 2 Computer Aided
Hand part classification using single depth images
 Hand part classification using single depth images Myoung-Kyu Sohn, Dong-Ju Kim and Hyunduk Kim Department of IT Convergence, Daegu Gyeongbuk Institute of Science & Technology (DGIST), Daegu, South Korea
Hand part classification using single depth images Myoung-Kyu Sohn, Dong-Ju Kim and Hyunduk Kim Department of IT Convergence, Daegu Gyeongbuk Institute of Science & Technology (DGIST), Daegu, South Korea
Real-Time Human Pose Recognition in Parts from Single Depth Images
 Real-Time Human Pose Recognition in Parts from Single Depth Images Jamie Shotton Andrew Fitzgibbon Mat Cook Toby Sharp Mark Finocchio Richard Moore Alex Kipman Andrew Blake Microsoft Research Cambridge
Real-Time Human Pose Recognition in Parts from Single Depth Images Jamie Shotton Andrew Fitzgibbon Mat Cook Toby Sharp Mark Finocchio Richard Moore Alex Kipman Andrew Blake Microsoft Research Cambridge
CS 223B Computer Vision Problem Set 3
 CS 223B Computer Vision Problem Set 3 Due: Feb. 22 nd, 2011 1 Probabilistic Recursion for Tracking In this problem you will derive a method for tracking a point of interest through a sequence of images.
CS 223B Computer Vision Problem Set 3 Due: Feb. 22 nd, 2011 1 Probabilistic Recursion for Tracking In this problem you will derive a method for tracking a point of interest through a sequence of images.
Object detection using Region Proposals (RCNN) Ernest Cheung COMP Presentation
 Ernest Cheung COMP Presentation") Object detection using Region Proposals (RCNN) Ernest Cheung COMP790-125 Presentation 1 2 Problem to solve Object detection Input: Image Output: Bounding box of the object 3 Object detection using CNN
Object detection using Region Proposals (RCNN) Ernest Cheung COMP790-125 Presentation 1 2 Problem to solve Object detection Input: Image Output: Bounding box of the object 3 Object detection using CNN
THE fast and reliable estimation of the pose of the human
 TRANS. PAMI, SUBMITTED FOR REVIEW, 2012 1 Efficient Human Pose Estimation from Single Depth Images Jamie Shotton, Member, IEEE, Ross Girshick, Andrew Fitzgibbon, Senior Member, IEEE, Toby Sharp, Senior
TRANS. PAMI, SUBMITTED FOR REVIEW, 2012 1 Efficient Human Pose Estimation from Single Depth Images Jamie Shotton, Member, IEEE, Ross Girshick, Andrew Fitzgibbon, Senior Member, IEEE, Toby Sharp, Senior
Kinect Device. How the Kinect Works. Kinect Device. What the Kinect does 4/27/16. Subhransu Maji Slides credit: Derek Hoiem, University of Illinois
 4/27/16 Kinect Device How the Kinect Works T2 Subhransu Maji Slides credit: Derek Hoiem, University of Illinois Photo frame-grabbed from: http://www.blisteredthumbs.net/2010/11/dance-central-angry-review
4/27/16 Kinect Device How the Kinect Works T2 Subhransu Maji Slides credit: Derek Hoiem, University of Illinois Photo frame-grabbed from: http://www.blisteredthumbs.net/2010/11/dance-central-angry-review
Estimating Human Pose in Images. Navraj Singh December 11, 2009
 Estimating Human Pose in Images Navraj Singh December 11, 2009 Introduction This project attempts to improve the performance of an existing method of estimating the pose of humans in still images. Tasks
Estimating Human Pose in Images Navraj Singh December 11, 2009 Introduction This project attempts to improve the performance of an existing method of estimating the pose of humans in still images. Tasks
Body Parts Dependent Joint Regressors for Human Pose Estimation in Still Images
 Research Collection Journal Article Body Parts Dependent Joint Regressors for Human Pose Estimation in Still Images Author(s): Dantone, Matthias; Gall, Juergen; Leistner, Christian; Van Gool, Luc Publication
Research Collection Journal Article Body Parts Dependent Joint Regressors for Human Pose Estimation in Still Images Author(s): Dantone, Matthias; Gall, Juergen; Leistner, Christian; Van Gool, Luc Publication
Tracking People. Tracking People: Context
 Tracking People A presentation of Deva Ramanan s Finding and Tracking People from the Bottom Up and Strike a Pose: Tracking People by Finding Stylized Poses Tracking People: Context Motion Capture Surveillance
Tracking People A presentation of Deva Ramanan s Finding and Tracking People from the Bottom Up and Strike a Pose: Tracking People by Finding Stylized Poses Tracking People: Context Motion Capture Surveillance
Part I: HumanEva-I dataset and evaluation metrics
 Part I: HumanEva-I dataset and evaluation metrics Leonid Sigal Michael J. Black Department of Computer Science Brown University http://www.cs.brown.edu/people/ls/ http://vision.cs.brown.edu/humaneva/ Motivation
Part I: HumanEva-I dataset and evaluation metrics Leonid Sigal Michael J. Black Department of Computer Science Brown University http://www.cs.brown.edu/people/ls/ http://vision.cs.brown.edu/humaneva/ Motivation
Kinect Cursor Control EEE178 Dr. Fethi Belkhouche Christopher Harris Danny Nguyen I. INTRODUCTION
 Kinect Cursor Control EEE178 Dr. Fethi Belkhouche Christopher Harris Danny Nguyen Abstract: An XBOX 360 Kinect is used to develop two applications to control the desktop cursor of a Windows computer. Application
Kinect Cursor Control EEE178 Dr. Fethi Belkhouche Christopher Harris Danny Nguyen Abstract: An XBOX 360 Kinect is used to develop two applications to control the desktop cursor of a Windows computer. Application
Analysis: TextonBoost and Semantic Texton Forests. Daniel Munoz Februrary 9, 2009
 Analysis: TextonBoost and Semantic Texton Forests Daniel Munoz 16-721 Februrary 9, 2009 Papers [shotton-eccv-06] J. Shotton, J. Winn, C. Rother, A. Criminisi, TextonBoost: Joint Appearance, Shape and Context
Analysis: TextonBoost and Semantic Texton Forests Daniel Munoz 16-721 Februrary 9, 2009 Papers [shotton-eccv-06] J. Shotton, J. Winn, C. Rother, A. Criminisi, TextonBoost: Joint Appearance, Shape and Context
Human Upper Body Posture Recognition and Upper Limbs Motion Parameters Estimation
 Human Upper Body Posture Recognition and Upper Limbs Motion Parameters Estimation Jun-Yang Huang 1 Shih-Chung Hsu 1 and Chung-Lin Huang 1,2 1. Department Of Electrical Engineering, National Tsing-Hua University,
Human Upper Body Posture Recognition and Upper Limbs Motion Parameters Estimation Jun-Yang Huang 1 Shih-Chung Hsu 1 and Chung-Lin Huang 1,2 1. Department Of Electrical Engineering, National Tsing-Hua University,
COSC160: Detection and Classification. Jeremy Bolton, PhD Assistant Teaching Professor
 COSC160: Detection and Classification Jeremy Bolton, PhD Assistant Teaching Professor Outline I. Problem I. Strategies II. Features for training III. Using spatial information? IV. Reducing dimensionality
COSC160: Detection and Classification Jeremy Bolton, PhD Assistant Teaching Professor Outline I. Problem I. Strategies II. Features for training III. Using spatial information? IV. Reducing dimensionality
Accurate 3D Face and Body Modeling from a Single Fixed Kinect
 Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
CS 231A Computer Vision (Winter 2018) Problem Set 3
 Problem Set 3") CS 231A Computer Vision (Winter 2018) Problem Set 3 Due: Feb 28, 2018 (11:59pm) 1 Space Carving (25 points) Dense 3D reconstruction is a difficult problem, as tackling it from the Structure from Motion
CS 231A Computer Vision (Winter 2018) Problem Set 3 Due: Feb 28, 2018 (11:59pm) 1 Space Carving (25 points) Dense 3D reconstruction is a difficult problem, as tackling it from the Structure from Motion
CS 231A Computer Vision (Fall 2012) Problem Set 3
 Problem Set 3") CS 231A Computer Vision (Fall 2012) Problem Set 3 Due: Nov. 13 th, 2012 (2:15pm) 1 Probabilistic Recursion for Tracking (20 points) In this problem you will derive a method for tracking a point of interest
CS 231A Computer Vision (Fall 2012) Problem Set 3 Due: Nov. 13 th, 2012 (2:15pm) 1 Probabilistic Recursion for Tracking (20 points) In this problem you will derive a method for tracking a point of interest
Gesture Recognition: Hand Pose Estimation
 Gesture Recognition: Hand Pose Estimation Ubiquitous computing seminar FS2014 Student report Adrian Spurr ETH Zurich spurra@student.ethz.ch ABSTRACT In this report, different vision-based approaches to
Gesture Recognition: Hand Pose Estimation Ubiquitous computing seminar FS2014 Student report Adrian Spurr ETH Zurich spurra@student.ethz.ch ABSTRACT In this report, different vision-based approaches to
Learning and Recognizing Visual Object Categories Without First Detecting Features
 Learning and Recognizing Visual Object Categories Without First Detecting Features Daniel Huttenlocher 2007 Joint work with D. Crandall and P. Felzenszwalb Object Category Recognition Generic classes rather
Learning and Recognizing Visual Object Categories Without First Detecting Features Daniel Huttenlocher 2007 Joint work with D. Crandall and P. Felzenszwalb Object Category Recognition Generic classes rather
CS 231A Computer Vision (Winter 2014) Problem Set 3
 Problem Set 3") CS 231A Computer Vision (Winter 2014) Problem Set 3 Due: Feb. 18 th, 2015 (11:59pm) 1 Single Object Recognition Via SIFT (45 points) In his 2004 SIFT paper, David Lowe demonstrates impressive object recognition
CS 231A Computer Vision (Winter 2014) Problem Set 3 Due: Feb. 18 th, 2015 (11:59pm) 1 Single Object Recognition Via SIFT (45 points) In his 2004 SIFT paper, David Lowe demonstrates impressive object recognition
Category vs. instance recognition
 Category vs. instance recognition Category: Find all the people Find all the buildings Often within a single image Often sliding window Instance: Is this face James? Find this specific famous building
Category vs. instance recognition Category: Find all the people Find all the buildings Often within a single image Often sliding window Instance: Is this face James? Find this specific famous building
Gesture Recognition: Hand Pose Estimation. Adrian Spurr Ubiquitous Computing Seminar FS
 Gesture Recognition: Hand Pose Estimation Adrian Spurr Ubiquitous Computing Seminar FS2014 27.05.2014 1 What is hand pose estimation? Input Computer-usable form 2 Augmented Reality Gaming Robot Control
Gesture Recognition: Hand Pose Estimation Adrian Spurr Ubiquitous Computing Seminar FS2014 27.05.2014 1 What is hand pose estimation? Input Computer-usable form 2 Augmented Reality Gaming Robot Control
Model-based Visual Tracking:
 Technische Universität München Model-based Visual Tracking: the OpenTL framework Giorgio Panin Technische Universität München Institut für Informatik Lehrstuhl für Echtzeitsysteme und Robotik (Prof. Alois
Technische Universität München Model-based Visual Tracking: the OpenTL framework Giorgio Panin Technische Universität München Institut für Informatik Lehrstuhl für Echtzeitsysteme und Robotik (Prof. Alois
3D Pose Estimation using Synthetic Data over Monocular Depth Images
 3D Pose Estimation using Synthetic Data over Monocular Depth Images Wei Chen cwind@stanford.edu Xiaoshi Wang xiaoshiw@stanford.edu Abstract We proposed an approach for human pose estimation over monocular
3D Pose Estimation using Synthetic Data over Monocular Depth Images Wei Chen cwind@stanford.edu Xiaoshi Wang xiaoshiw@stanford.edu Abstract We proposed an approach for human pose estimation over monocular
Recognition of Animal Skin Texture Attributes in the Wild. Amey Dharwadker (aap2174) Kai Zhang (kz2213)
 Kai Zhang (kz2213)") Recognition of Animal Skin Texture Attributes in the Wild Amey Dharwadker (aap2174) Kai Zhang (kz2213) Motivation Patterns and textures are have an important role in object description and understanding
Recognition of Animal Skin Texture Attributes in the Wild Amey Dharwadker (aap2174) Kai Zhang (kz2213) Motivation Patterns and textures are have an important role in object description and understanding
Lecture 19: Depth Cameras. Visual Computing Systems CMU , Fall 2013
 Lecture 19: Depth Cameras Visual Computing Systems Continuing theme: computational photography Cameras capture light, then extensive processing produces the desired image Today: - Capturing scene depth
Lecture 19: Depth Cameras Visual Computing Systems Continuing theme: computational photography Cameras capture light, then extensive processing produces the desired image Today: - Capturing scene depth
CAP 6412 Advanced Computer Vision
 CAP 6412 Advanced Computer Vision http://www.cs.ucf.edu/~bgong/cap6412.html Boqing Gong April 21st, 2016 Today Administrivia Free parameters in an approach, model, or algorithm? Egocentric videos by Aisha
CAP 6412 Advanced Computer Vision http://www.cs.ucf.edu/~bgong/cap6412.html Boqing Gong April 21st, 2016 Today Administrivia Free parameters in an approach, model, or algorithm? Egocentric videos by Aisha
Classification. Vladimir Curic. Centre for Image Analysis Swedish University of Agricultural Sciences Uppsala University
 Classification Vladimir Curic Centre for Image Analysis Swedish University of Agricultural Sciences Uppsala University Outline An overview on classification Basics of classification How to choose appropriate
Classification Vladimir Curic Centre for Image Analysis Swedish University of Agricultural Sciences Uppsala University Outline An overview on classification Basics of classification How to choose appropriate
A novel template matching method for human detection
 University of Wollongong Research Online Faculty of Informatics - Papers (Archive) Faculty of Engineering and Information Sciences 2009 A novel template matching method for human detection Duc Thanh Nguyen
University of Wollongong Research Online Faculty of Informatics - Papers (Archive) Faculty of Engineering and Information Sciences 2009 A novel template matching method for human detection Duc Thanh Nguyen
Linear combinations of simple classifiers for the PASCAL challenge
 Linear combinations of simple classifiers for the PASCAL challenge Nik A. Melchior and David Lee 16 721 Advanced Perception The Robotics Institute Carnegie Mellon University Email: melchior@cmu.edu, dlee1@andrew.cmu.edu
Linear combinations of simple classifiers for the PASCAL challenge Nik A. Melchior and David Lee 16 721 Advanced Perception The Robotics Institute Carnegie Mellon University Email: melchior@cmu.edu, dlee1@andrew.cmu.edu
DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material
 DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material Yi Li 1, Gu Wang 1, Xiangyang Ji 1, Yu Xiang 2, and Dieter Fox 2 1 Tsinghua University, BNRist 2 University of Washington
DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material Yi Li 1, Gu Wang 1, Xiangyang Ji 1, Yu Xiang 2, and Dieter Fox 2 1 Tsinghua University, BNRist 2 University of Washington
Integral Channel Features with Random Forest for 3D Facial Landmark Detection
 MSc Artificial Intelligence Track: Computer Vision Master Thesis Integral Channel Features with Random Forest for 3D Facial Landmark Detection by Arif Qodari 10711996 February 2016 42 EC Supervisor/Examiner:
MSc Artificial Intelligence Track: Computer Vision Master Thesis Integral Channel Features with Random Forest for 3D Facial Landmark Detection by Arif Qodari 10711996 February 2016 42 EC Supervisor/Examiner:
Object Category Detection. Slides mostly from Derek Hoiem
 Object Category Detection Slides mostly from Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical template matching with sliding window Part-based Models
Object Category Detection Slides mostly from Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical template matching with sliding window Part-based Models
Deformable Part Models
 CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
Tri-modal Human Body Segmentation
 Tri-modal Human Body Segmentation Master of Science Thesis Cristina Palmero Cantariño Advisor: Sergio Escalera Guerrero February 6, 2014 Outline 1 Introduction 2 Tri-modal dataset 3 Proposed baseline 4
Tri-modal Human Body Segmentation Master of Science Thesis Cristina Palmero Cantariño Advisor: Sergio Escalera Guerrero February 6, 2014 Outline 1 Introduction 2 Tri-modal dataset 3 Proposed baseline 4
Three-Dimensional Object Detection and Layout Prediction using Clouds of Oriented Gradients
 ThreeDimensional Object Detection and Layout Prediction using Clouds of Oriented Gradients Authors: Zhile Ren, Erik B. Sudderth Presented by: Shannon Kao, Max Wang October 19, 2016 Introduction Given an
ThreeDimensional Object Detection and Layout Prediction using Clouds of Oriented Gradients Authors: Zhile Ren, Erik B. Sudderth Presented by: Shannon Kao, Max Wang October 19, 2016 Introduction Given an
Multi-view Body Part Recognition with Random Forests
 KAZEMI, BURENIUS, AZIZPOUR, SULLIVAN: MULTI-VIEW BODY PART RECOGNITION 1 Multi-view Body Part Recognition with Random Forests Vahid Kazemi vahidk@csc.kth.se Magnus Burenius burenius@csc.kth.se Hossein
KAZEMI, BURENIUS, AZIZPOUR, SULLIVAN: MULTI-VIEW BODY PART RECOGNITION 1 Multi-view Body Part Recognition with Random Forests Vahid Kazemi vahidk@csc.kth.se Magnus Burenius burenius@csc.kth.se Hossein
Latent variable pictorial structure for human pose estimation on depth images
 1 2 3 4 5 6 7 Latent variable pictorial structure for human pose estimation on depth images Li He a, Guijin Wang a,, Qingmin Liao b, Jing-Hao Xue c a Department of Electronic Engineering, Tsinghua University,
1 2 3 4 5 6 7 Latent variable pictorial structure for human pose estimation on depth images Li He a, Guijin Wang a,, Qingmin Liao b, Jing-Hao Xue c a Department of Electronic Engineering, Tsinghua University,
Visuelle Perzeption für Mensch- Maschine Schnittstellen
 Visuelle Perzeption für Mensch- Maschine Schnittstellen Vorlesung, WS 2009 Prof. Dr. Rainer Stiefelhagen Dr. Edgar Seemann Institut für Anthropomatik Universität Karlsruhe (TH) http://cvhci.ira.uka.de
Visuelle Perzeption für Mensch- Maschine Schnittstellen Vorlesung, WS 2009 Prof. Dr. Rainer Stiefelhagen Dr. Edgar Seemann Institut für Anthropomatik Universität Karlsruhe (TH) http://cvhci.ira.uka.de
Multi-View 3D Object Detection Network for Autonomous Driving
 Multi-View 3D Object Detection Network for Autonomous Driving Xiaozhi Chen, Huimin Ma, Ji Wan, Bo Li, Tian Xia CVPR 2017 (Spotlight) Presented By: Jason Ku Overview Motivation Dataset Network Architecture
Multi-View 3D Object Detection Network for Autonomous Driving Xiaozhi Chen, Huimin Ma, Ji Wan, Bo Li, Tian Xia CVPR 2017 (Spotlight) Presented By: Jason Ku Overview Motivation Dataset Network Architecture
Mobile Human Detection Systems based on Sliding Windows Approach-A Review
 Mobile Human Detection Systems based on Sliding Windows Approach-A Review Seminar: Mobile Human detection systems Njieutcheu Tassi cedrique Rovile Department of Computer Engineering University of Heidelberg
Mobile Human Detection Systems based on Sliding Windows Approach-A Review Seminar: Mobile Human detection systems Njieutcheu Tassi cedrique Rovile Department of Computer Engineering University of Heidelberg
A Framework for Efficient Fingerprint Identification using a Minutiae Tree
 A Framework for Efficient Fingerprint Identification using a Minutiae Tree Praveer Mansukhani February 22, 2008 Problem Statement Developing a real-time scalable minutiae-based indexing system using a
A Framework for Efficient Fingerprint Identification using a Minutiae Tree Praveer Mansukhani February 22, 2008 Problem Statement Developing a real-time scalable minutiae-based indexing system using a
Robotics Programming Laboratory
 Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Uncertainty-Driven 6D Pose Estimation of Objects and Scenes from a Single RGB Image - Supplementary Material -
 Uncertainty-Driven 6D Pose Estimation of s and Scenes from a Single RGB Image - Supplementary Material - Eric Brachmann*, Frank Michel, Alexander Krull, Michael Ying Yang, Stefan Gumhold, Carsten Rother
Uncertainty-Driven 6D Pose Estimation of s and Scenes from a Single RGB Image - Supplementary Material - Eric Brachmann*, Frank Michel, Alexander Krull, Michael Ying Yang, Stefan Gumhold, Carsten Rother
Global Probability of Boundary
 Global Probability of Boundary Learning to Detect Natural Image Boundaries Using Local Brightness, Color, and Texture Cues Martin, Fowlkes, Malik Using Contours to Detect and Localize Junctions in Natural
Global Probability of Boundary Learning to Detect Natural Image Boundaries Using Local Brightness, Color, and Texture Cues Martin, Fowlkes, Malik Using Contours to Detect and Localize Junctions in Natural
Visuelle Perzeption für Mensch- Maschine Schnittstellen
 Visuelle Perzeption für Mensch- Maschine Schnittstellen Vorlesung, WS 2009 Prof. Dr. Rainer Stiefelhagen Dr. Edgar Seemann Institut für Anthropomatik Universität Karlsruhe (TH) http://cvhci.ira.uka.de
Visuelle Perzeption für Mensch- Maschine Schnittstellen Vorlesung, WS 2009 Prof. Dr. Rainer Stiefelhagen Dr. Edgar Seemann Institut für Anthropomatik Universität Karlsruhe (TH) http://cvhci.ira.uka.de
LEARNING TO GENERATE CHAIRS WITH CONVOLUTIONAL NEURAL NETWORKS
 LEARNING TO GENERATE CHAIRS WITH CONVOLUTIONAL NEURAL NETWORKS Alexey Dosovitskiy, Jost Tobias Springenberg and Thomas Brox University of Freiburg Presented by: Shreyansh Daftry Visual Learning and Recognition
LEARNING TO GENERATE CHAIRS WITH CONVOLUTIONAL NEURAL NETWORKS Alexey Dosovitskiy, Jost Tobias Springenberg and Thomas Brox University of Freiburg Presented by: Shreyansh Daftry Visual Learning and Recognition
Fast Sample Generation with Variational Bayesian for Limited Data Hyperspectral Image Classification
 Fast Sample Generation with Variational Bayesian for Limited Data Hyperspectral Image Classification July 26, 2018 AmirAbbas Davari, Hasan Can Özkan, Andreas Maier, Christian Riess Pattern Recognition
Fast Sample Generation with Variational Bayesian for Limited Data Hyperspectral Image Classification July 26, 2018 AmirAbbas Davari, Hasan Can Özkan, Andreas Maier, Christian Riess Pattern Recognition
Pose Estimation on Depth Images with Convolutional Neural Network
 Pose Estimation on Depth Images with Convolutional Neural Network Jingwei Huang Stanford University jingweih@stanford.edu David Altamar Stanford University daltamar@stanford.edu Abstract In this paper
Pose Estimation on Depth Images with Convolutional Neural Network Jingwei Huang Stanford University jingweih@stanford.edu David Altamar Stanford University daltamar@stanford.edu Abstract In this paper
Data-driven Depth Inference from a Single Still Image
 Data-driven Depth Inference from a Single Still Image Kyunghee Kim Computer Science Department Stanford University kyunghee.kim@stanford.edu Abstract Given an indoor image, how to recover its depth information
Data-driven Depth Inference from a Single Still Image Kyunghee Kim Computer Science Department Stanford University kyunghee.kim@stanford.edu Abstract Given an indoor image, how to recover its depth information
DPM Configurations for Human Interaction Detection
 DPM Configurations for Human Interaction Detection Coert van Gemeren Ronald Poppe Remco C. Veltkamp Interaction Technology Group, Department of Information and Computing Sciences, Utrecht University, The
DPM Configurations for Human Interaction Detection Coert van Gemeren Ronald Poppe Remco C. Veltkamp Interaction Technology Group, Department of Information and Computing Sciences, Utrecht University, The
Joint Classification-Regression Forests for Spatially Structured Multi-Object Segmentation
 Joint Classification-Regression Forests for Spatially Structured Multi-Object Segmentation Ben Glocker 1, Olivier Pauly 2,3, Ender Konukoglu 1, Antonio Criminisi 1 1 Microsoft Research, Cambridge, UK 2
Joint Classification-Regression Forests for Spatially Structured Multi-Object Segmentation Ben Glocker 1, Olivier Pauly 2,3, Ender Konukoglu 1, Antonio Criminisi 1 1 Microsoft Research, Cambridge, UK 2
Human Motion Detection and Tracking for Video Surveillance
 Human Motion Detection and Tracking for Video Surveillance Prithviraj Banerjee and Somnath Sengupta Department of Electronics and Electrical Communication Engineering Indian Institute of Technology, Kharagpur,
Human Motion Detection and Tracking for Video Surveillance Prithviraj Banerjee and Somnath Sengupta Department of Electronics and Electrical Communication Engineering Indian Institute of Technology, Kharagpur,
Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks
 Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks Si Chen The George Washington University sichen@gwmail.gwu.edu Meera Hahn Emory University mhahn7@emory.edu Mentor: Afshin
Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks Si Chen The George Washington University sichen@gwmail.gwu.edu Meera Hahn Emory University mhahn7@emory.edu Mentor: Afshin
AUTOMATIC 3D HUMAN ACTION RECOGNITION Ajmal Mian Associate Professor Computer Science & Software Engineering
 AUTOMATIC 3D HUMAN ACTION RECOGNITION Ajmal Mian Associate Professor Computer Science & Software Engineering www.csse.uwa.edu.au/~ajmal/ Overview Aim of automatic human action recognition Applications
AUTOMATIC 3D HUMAN ACTION RECOGNITION Ajmal Mian Associate Professor Computer Science & Software Engineering www.csse.uwa.edu.au/~ajmal/ Overview Aim of automatic human action recognition Applications
CS381V Experiment Presentation. Chun-Chen Kuo
 CS381V Experiment Presentation Chun-Chen Kuo The Paper Indoor Segmentation and Support Inference from RGBD Images. N. Silberman, D. Hoiem, P. Kohli, and R. Fergus. ECCV 2012. 50 100 150 200 250 300 350
CS381V Experiment Presentation Chun-Chen Kuo The Paper Indoor Segmentation and Support Inference from RGBD Images. N. Silberman, D. Hoiem, P. Kohli, and R. Fergus. ECCV 2012. 50 100 150 200 250 300 350
Exploiting Depth Camera for 3D Spatial Relationship Interpretation
 Exploiting Depth Camera for 3D Spatial Relationship Interpretation Jun Ye Kien A. Hua Data Systems Group, University of Central Florida Mar 1, 2013 Jun Ye and Kien A. Hua (UCF) 3D directional spatial relationships
Exploiting Depth Camera for 3D Spatial Relationship Interpretation Jun Ye Kien A. Hua Data Systems Group, University of Central Florida Mar 1, 2013 Jun Ye and Kien A. Hua (UCF) 3D directional spatial relationships
Domain Adaptation for Upper Body Pose Tracking in Signed TV Broadcasts
 CHARLES et al.: DOMAIN ADAPTATION FOR UPPER BODY POSE TRACKING 1 Domain Adaptation for Upper Body Pose Tracking in Signed TV Broadcasts James Charles 1 j.charles@leeds.ac.uk Tomas Pfister 2 tp@robots.ox.ac.uk
CHARLES et al.: DOMAIN ADAPTATION FOR UPPER BODY POSE TRACKING 1 Domain Adaptation for Upper Body Pose Tracking in Signed TV Broadcasts James Charles 1 j.charles@leeds.ac.uk Tomas Pfister 2 tp@robots.ox.ac.uk
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
CS4495/6495 Introduction to Computer Vision. 8C-L1 Classification: Discriminative models
 CS4495/6495 Introduction to Computer Vision 8C-L1 Classification: Discriminative models Remember: Supervised classification Given a collection of labeled examples, come up with a function that will predict
CS4495/6495 Introduction to Computer Vision 8C-L1 Classification: Discriminative models Remember: Supervised classification Given a collection of labeled examples, come up with a function that will predict
Advanced Video Content Analysis and Video Compression (5LSH0), Module 8B
, Module 8B") Advanced Video Content Analysis and Video Compression (5LSH0), Module 8B 1 Supervised learning Catogarized / labeled data Objects in a picture: chair, desk, person, 2 Classification Fons van der Sommen
Advanced Video Content Analysis and Video Compression (5LSH0), Module 8B 1 Supervised learning Catogarized / labeled data Objects in a picture: chair, desk, person, 2 Classification Fons van der Sommen
Photo-realistic Renderings for Machines Seong-heum Kim
 Photo-realistic Renderings for Machines 20105034 Seong-heum Kim CS580 Student Presentations 2016.04.28 Photo-realistic Renderings for Machines Scene radiances Model descriptions (Light, Shape, Material,
Photo-realistic Renderings for Machines 20105034 Seong-heum Kim CS580 Student Presentations 2016.04.28 Photo-realistic Renderings for Machines Scene radiances Model descriptions (Light, Shape, Material,
Texton Clustering for Local Classification using Scene-Context Scale
 Texton Clustering for Local Classification using Scene-Context Scale Yousun Kang Tokyo Polytechnic University Atsugi, Kanakawa, Japan 243-0297 Email: yskang@cs.t-kougei.ac.jp Sugimoto Akihiro National
Texton Clustering for Local Classification using Scene-Context Scale Yousun Kang Tokyo Polytechnic University Atsugi, Kanakawa, Japan 243-0297 Email: yskang@cs.t-kougei.ac.jp Sugimoto Akihiro National
Human Detection and Tracking for Video Surveillance: A Cognitive Science Approach
 Human Detection and Tracking for Video Surveillance: A Cognitive Science Approach Vandit Gajjar gajjar.vandit.381@ldce.ac.in Ayesha Gurnani gurnani.ayesha.52@ldce.ac.in Yash Khandhediya khandhediya.yash.364@ldce.ac.in
Human Detection and Tracking for Video Surveillance: A Cognitive Science Approach Vandit Gajjar gajjar.vandit.381@ldce.ac.in Ayesha Gurnani gurnani.ayesha.52@ldce.ac.in Yash Khandhediya khandhediya.yash.364@ldce.ac.in
A two-step methodology for human pose estimation increasing the accuracy and reducing the amount of learning samples dramatically
 A two-step methodology for human pose estimation increasing the accuracy and reducing the amount of learning samples dramatically Samir Azrour, Sébastien Piérard, Pierre Geurts, and Marc Van Droogenbroeck
A two-step methodology for human pose estimation increasing the accuracy and reducing the amount of learning samples dramatically Samir Azrour, Sébastien Piérard, Pierre Geurts, and Marc Van Droogenbroeck
Learning video saliency from human gaze using candidate selection
 Learning video saliency from human gaze using candidate selection Rudoy, Goldman, Shechtman, Zelnik-Manor CVPR 2013 Paper presentation by Ashish Bora Outline What is saliency? Image vs video Candidates
Learning video saliency from human gaze using candidate selection Rudoy, Goldman, Shechtman, Zelnik-Manor CVPR 2013 Paper presentation by Ashish Bora Outline What is saliency? Image vs video Candidates
Ulas Bagci
 CAP5415-Computer Vision Lecture 14-Decision Forests for Computer Vision Ulas Bagci bagci@ucf.edu 1 Readings Slide Credits: Criminisi and Shotton Z. Tu R.Cipolla 2 Common Terminologies Randomized Decision
CAP5415-Computer Vision Lecture 14-Decision Forests for Computer Vision Ulas Bagci bagci@ucf.edu 1 Readings Slide Credits: Criminisi and Shotton Z. Tu R.Cipolla 2 Common Terminologies Randomized Decision
Object Category Detection: Sliding Windows
 04/10/12 Object Category Detection: Sliding Windows Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical
04/10/12 Object Category Detection: Sliding Windows Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical
Video based Animation Synthesis with the Essential Graph. Adnane Boukhayma, Edmond Boyer MORPHEO INRIA Grenoble Rhône-Alpes
 Video based Animation Synthesis with the Essential Graph Adnane Boukhayma, Edmond Boyer MORPHEO INRIA Grenoble Rhône-Alpes Goal Given a set of 4D models, how to generate realistic motion from user specified
Video based Animation Synthesis with the Essential Graph Adnane Boukhayma, Edmond Boyer MORPHEO INRIA Grenoble Rhône-Alpes Goal Given a set of 4D models, how to generate realistic motion from user specified
Category-level localization
 Category-level localization Cordelia Schmid Recognition Classification Object present/absent in an image Often presence of a significant amount of background clutter Localization / Detection Localize object
Category-level localization Cordelia Schmid Recognition Classification Object present/absent in an image Often presence of a significant amount of background clutter Localization / Detection Localize object
Real-Time Human Detection using Relational Depth Similarity Features
 Real-Time Human Detection using Relational Depth Similarity Features Sho Ikemura, Hironobu Fujiyoshi Dept. of Computer Science, Chubu University. Matsumoto 1200, Kasugai, Aichi, 487-8501 Japan. si@vision.cs.chubu.ac.jp,
Real-Time Human Detection using Relational Depth Similarity Features Sho Ikemura, Hironobu Fujiyoshi Dept. of Computer Science, Chubu University. Matsumoto 1200, Kasugai, Aichi, 487-8501 Japan. si@vision.cs.chubu.ac.jp,
Human Upper Body Pose Estimation in Static Images
 1. Research Team Human Upper Body Pose Estimation in Static Images Project Leader: Graduate Students: Prof. Isaac Cohen, Computer Science Mun Wai Lee 2. Statement of Project Goals This goal of this project
1. Research Team Human Upper Body Pose Estimation in Static Images Project Leader: Graduate Students: Prof. Isaac Cohen, Computer Science Mun Wai Lee 2. Statement of Project Goals This goal of this project
Automatic Gait Recognition. - Karthik Sridharan
 Automatic Gait Recognition - Karthik Sridharan Gait as a Biometric Gait A person s manner of walking Webster Definition It is a non-contact, unobtrusive, perceivable at a distance and hard to disguise
Automatic Gait Recognition - Karthik Sridharan Gait as a Biometric Gait A person s manner of walking Webster Definition It is a non-contact, unobtrusive, perceivable at a distance and hard to disguise
Announcements. Recognition. Recognition. Recognition. Recognition. Homework 3 is due May 18, 11:59 PM Reading: Computer Vision I CSE 152 Lecture 14
 Announcements Computer Vision I CSE 152 Lecture 14 Homework 3 is due May 18, 11:59 PM Reading: Chapter 15: Learning to Classify Chapter 16: Classifying Images Chapter 17: Detecting Objects in Images Given
Announcements Computer Vision I CSE 152 Lecture 14 Homework 3 is due May 18, 11:59 PM Reading: Chapter 15: Learning to Classify Chapter 16: Classifying Images Chapter 17: Detecting Objects in Images Given
Contents I IMAGE FORMATION 1
 Contents I IMAGE FORMATION 1 1 Geometric Camera Models 3 1.1 Image Formation............................. 4 1.1.1 Pinhole Perspective....................... 4 1.1.2 Weak Perspective.........................
Contents I IMAGE FORMATION 1 1 Geometric Camera Models 3 1.1 Image Formation............................. 4 1.1.1 Pinhole Perspective....................... 4 1.1.2 Weak Perspective.........................
Modeling 3D Human Poses from Uncalibrated Monocular Images
 Modeling 3D Human Poses from Uncalibrated Monocular Images Xiaolin K. Wei Texas A&M University xwei@cse.tamu.edu Jinxiang Chai Texas A&M University jchai@cse.tamu.edu Abstract This paper introduces an
Modeling 3D Human Poses from Uncalibrated Monocular Images Xiaolin K. Wei Texas A&M University xwei@cse.tamu.edu Jinxiang Chai Texas A&M University jchai@cse.tamu.edu Abstract This paper introduces an
CS395T paper review. Indoor Segmentation and Support Inference from RGBD Images. Chao Jia Sep
 CS395T paper review Indoor Segmentation and Support Inference from RGBD Images Chao Jia Sep 28 2012 Introduction What do we want -- Indoor scene parsing Segmentation and labeling Support relationships
CS395T paper review Indoor Segmentation and Support Inference from RGBD Images Chao Jia Sep 28 2012 Introduction What do we want -- Indoor scene parsing Segmentation and labeling Support relationships
Stochastic Road Shape Estimation, B. Southall & C. Taylor. Review by: Christopher Rasmussen
 Stochastic Road Shape Estimation, B. Southall & C. Taylor Review by: Christopher Rasmussen September 26, 2002 Announcements Readings for next Tuesday: Chapter 14-14.4, 22-22.5 in Forsyth & Ponce Main Contributions
Stochastic Road Shape Estimation, B. Southall & C. Taylor Review by: Christopher Rasmussen September 26, 2002 Announcements Readings for next Tuesday: Chapter 14-14.4, 22-22.5 in Forsyth & Ponce Main Contributions
Window based detectors
 Window based detectors CS 554 Computer Vision Pinar Duygulu Bilkent University (Source: James Hays, Brown) Today Window-based generic object detection basic pipeline boosting classifiers face detection
Window based detectors CS 554 Computer Vision Pinar Duygulu Bilkent University (Source: James Hays, Brown) Today Window-based generic object detection basic pipeline boosting classifiers face detection
Robust PDF Table Locator
 Robust PDF Table Locator December 17, 2016 1 Introduction Data scientists rely on an abundance of tabular data stored in easy-to-machine-read formats like.csv files. Unfortunately, most government records
Robust PDF Table Locator December 17, 2016 1 Introduction Data scientists rely on an abundance of tabular data stored in easy-to-machine-read formats like.csv files. Unfortunately, most government records
Feature Descriptors. CS 510 Lecture #21 April 29 th, 2013
 Feature Descriptors CS 510 Lecture #21 April 29 th, 2013 Programming Assignment #4 Due two weeks from today Any questions? How is it going? Where are we? We have two umbrella schemes for object recognition
Feature Descriptors CS 510 Lecture #21 April 29 th, 2013 Programming Assignment #4 Due two weeks from today Any questions? How is it going? Where are we? We have two umbrella schemes for object recognition
Learning 6D Object Pose Estimation and Tracking
 Learning 6D Object Pose Estimation and Tracking Carsten Rother presented by: Alexander Krull 21/12/2015 6D Pose Estimation Input: RGBD-image Known 3D model Output: 6D rigid body transform of object 21/12/2015
Learning 6D Object Pose Estimation and Tracking Carsten Rother presented by: Alexander Krull 21/12/2015 6D Pose Estimation Input: RGBD-image Known 3D model Output: 6D rigid body transform of object 21/12/2015
Lecture 25: Review I
 Lecture 25: Review I Reading: Up to chapter 5 in ISLR. STATS 202: Data mining and analysis Jonathan Taylor 1 / 18 Unsupervised learning In unsupervised learning, all the variables are on equal standing,
Lecture 25: Review I Reading: Up to chapter 5 in ISLR. STATS 202: Data mining and analysis Jonathan Taylor 1 / 18 Unsupervised learning In unsupervised learning, all the variables are on equal standing,
Action recognition in videos
 Action recognition in videos Cordelia Schmid INRIA Grenoble Joint work with V. Ferrari, A. Gaidon, Z. Harchaoui, A. Klaeser, A. Prest, H. Wang Action recognition - goal Short actions, i.e. drinking, sit
Action recognition in videos Cordelia Schmid INRIA Grenoble Joint work with V. Ferrari, A. Gaidon, Z. Harchaoui, A. Klaeser, A. Prest, H. Wang Action recognition - goal Short actions, i.e. drinking, sit
Nonrigid Surface Modelling. and Fast Recovery. Department of Computer Science and Engineering. Committee: Prof. Leo J. Jia and Prof. K. H.
 Nonrigid Surface Modelling and Fast Recovery Zhu Jianke Supervisor: Prof. Michael R. Lyu Committee: Prof. Leo J. Jia and Prof. K. H. Wong Department of Computer Science and Engineering May 11, 2007 1 2
Nonrigid Surface Modelling and Fast Recovery Zhu Jianke Supervisor: Prof. Michael R. Lyu Committee: Prof. Leo J. Jia and Prof. K. H. Wong Department of Computer Science and Engineering May 11, 2007 1 2
Announcements. Recognition I. Gradient Space (p,q) What is the reflectance map?
 What is the reflectance map?") Announcements I HW 3 due 12 noon, tomorrow. HW 4 to be posted soon recognition Lecture plan recognition for next two lectures, then video and motion. Introduction to Computer Vision CSE 152 Lecture 17
Announcements I HW 3 due 12 noon, tomorrow. HW 4 to be posted soon recognition Lecture plan recognition for next two lectures, then video and motion. Introduction to Computer Vision CSE 152 Lecture 17
Combining PGMs and Discriminative Models for Upper Body Pose Detection
 Combining PGMs and Discriminative Models for Upper Body Pose Detection Gedas Bertasius May 30, 2014 1 Introduction In this project, I utilized probabilistic graphical models together with discriminative
Combining PGMs and Discriminative Models for Upper Body Pose Detection Gedas Bertasius May 30, 2014 1 Introduction In this project, I utilized probabilistic graphical models together with discriminative
Walking gait dataset: point clouds, skeletons and silhouettes
 Walking gait dataset: point clouds, skeletons and silhouettes Technical Report Number 1379 Trong-Nguyen Nguyen * and Jean Meunier DIRO, University of Montreal, Montreal, QC, Canada September 8, 2018 Abstract
Walking gait dataset: point clouds, skeletons and silhouettes Technical Report Number 1379 Trong-Nguyen Nguyen * and Jean Meunier DIRO, University of Montreal, Montreal, QC, Canada September 8, 2018 Abstract
Transfer Forest Based on Covariate Shift
 Transfer Forest Based on Covariate Shift Masamitsu Tsuchiya SECURE, INC. tsuchiya@secureinc.co.jp Yuji Yamauchi, Takayoshi Yamashita, Hironobu Fujiyoshi Chubu University yuu@vision.cs.chubu.ac.jp, {yamashita,
Transfer Forest Based on Covariate Shift Masamitsu Tsuchiya SECURE, INC. tsuchiya@secureinc.co.jp Yuji Yamauchi, Takayoshi Yamashita, Hironobu Fujiyoshi Chubu University yuu@vision.cs.chubu.ac.jp, {yamashita,
Generic Face Alignment Using an Improved Active Shape Model
 Generic Face Alignment Using an Improved Active Shape Model Liting Wang, Xiaoqing Ding, Chi Fang Electronic Engineering Department, Tsinghua University, Beijing, China {wanglt, dxq, fangchi} @ocrserv.ee.tsinghua.edu.cn
Generic Face Alignment Using an Improved Active Shape Model Liting Wang, Xiaoqing Ding, Chi Fang Electronic Engineering Department, Tsinghua University, Beijing, China {wanglt, dxq, fangchi} @ocrserv.ee.tsinghua.edu.cn
Recovering 6D Object Pose and Predicting Next-Best-View in the Crowd Supplementary Material
 Recovering 6D Object Pose and Predicting Next-Best-View in the Crowd Supplementary Material Andreas Doumanoglou 1,2, Rigas Kouskouridas 1, Sotiris Malassiotis 2, Tae-Kyun Kim 1 1 Imperial College London
Recovering 6D Object Pose and Predicting Next-Best-View in the Crowd Supplementary Material Andreas Doumanoglou 1,2, Rigas Kouskouridas 1, Sotiris Malassiotis 2, Tae-Kyun Kim 1 1 Imperial College London
Optical flow and tracking
 EECS 442 Computer vision Optical flow and tracking Intro Optical flow and feature tracking Lucas-Kanade algorithm Motion segmentation Segments of this lectures are courtesy of Profs S. Lazebnik S. Seitz,
EECS 442 Computer vision Optical flow and tracking Intro Optical flow and feature tracking Lucas-Kanade algorithm Motion segmentation Segments of this lectures are courtesy of Profs S. Lazebnik S. Seitz,