Particle Video: Long-Range Video Motion Estimation using Point Trajectories. Peter Sand Seth Teller MIT CSAIL
|
|
|
- Oliver Carroll
- 5 years ago
- Views:
Transcription
1 Particle Video: Long-Range Video Motion Estimation using Point Trajectories Peter Sand Seth Teller MIT CSAIL
2 Long-Range Motion Estimation

3 Long-Range Motion Estimation

4 Long-Range Motion Estimation

5 Long-Range Motion Estimation
6 Long-Range Motion Estimation

7 Long-Range Motion Estimation

8 Long-Range Motion Estimation

9 Long-Range Motion Estimation

10 Long-Range Motion Estimation

11 Long-Range Motion Estimation

12 Long-Range Motion Estimation

13 Long-Range Motion Estimation

14 Long-Range Motion Estimation

15 Long-Range Motion Estimation

16 Long-Range Motion Estimation

17 Long-Range Motion Estimation
18 Applications Input Image Output Image Photoshop, etc. Input Video Output Video Particle-based editor






19 Applications Super-resolution Noise removal High dynamic range video Image filtering Video segmentation Matting / rotoscoping Object removal [Capel and Zisserman 2001] [Bennett and McMillan 2005] [Jue Wang et al. 2004] [Criminisi et al. 2003]
20 Applications Long-range motion estimation is a step toward a larger goal: video decomposition. Input Video Geometry Motion Reflectance Lighting

21 Design Goals
22 Design Goals
23 Design Goals

24 t Related Work

25 Related Work: Optical Flow Temporal smoothness assumption [Black and Anandan 1991, Chin et al. 1994, Elad and Feuer 1998, Shi and Malik 1998] [Elad and Feuer 1998]



26 Related Work: Optical Flow Rank-based optical flow [Irani 1999, Brand 2001] [Brand 2001]

27 Related Work: Optical Flow Occlusion labeling: Pixel dissimilarity [Silva and Santos-Victor 2001, Xiao et al. 2006] Forward / backward mismatch [Alvarez et al. 2002] [Stretcha et al. 2004]
28 Particle Approach Particles are small Adaptive density Does not assume temporal motion smoothness
29 Particle Approach Triangulation implicitly represents particle grouping Non-parametric Not layer-based No segmentation Not planar or rigid components
30 Optical Flow as Input

![2004] Label occluded regions Bilateral flow filter](/docs-images/95/123579851/images/31-1.jpg "Similar to [Xiao et al.")
31 An Optical Flow Algorithm At each resolution level: Variational flow update Similar to [Brox et al. 2004] Label occluded regions Bilateral flow filter Similar to [Xiao et al. 2006] (see paper for more details)



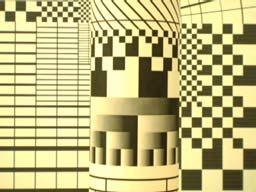
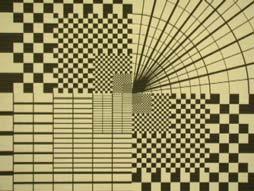
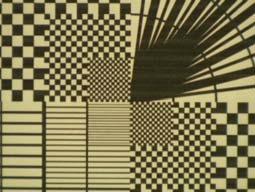
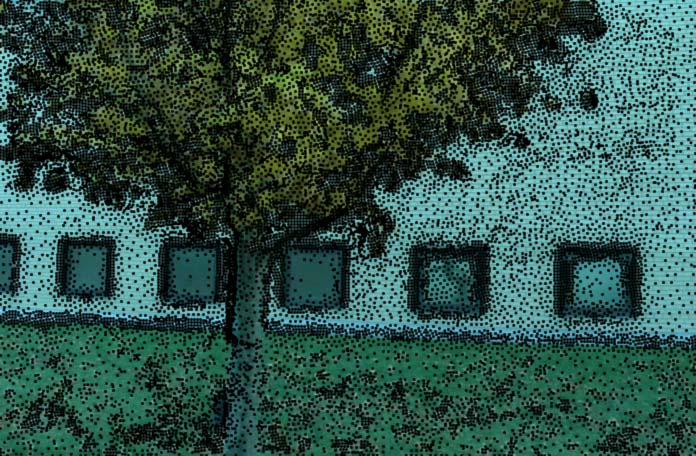
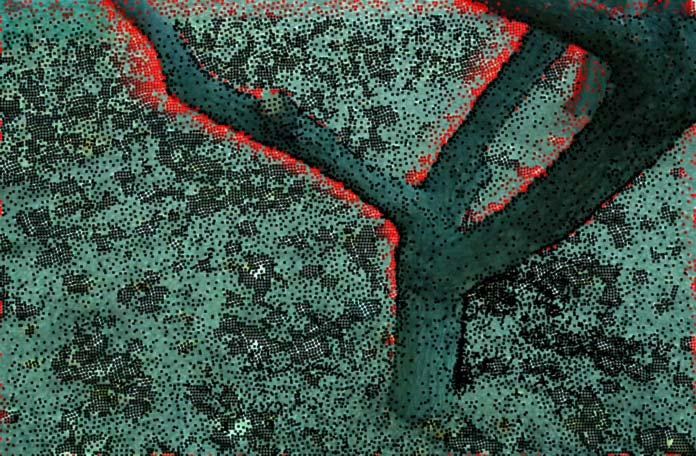
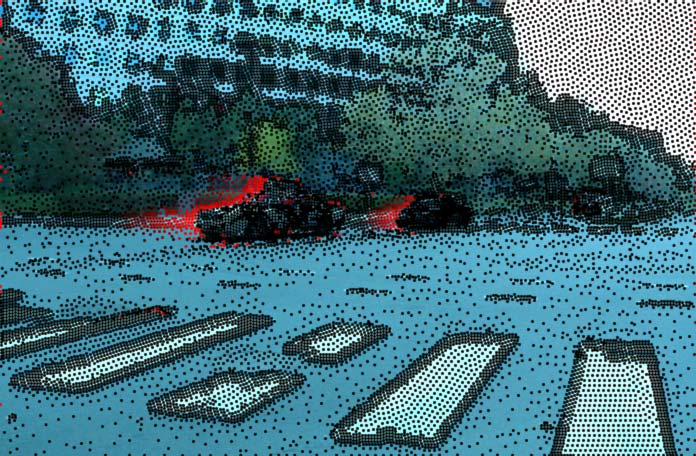
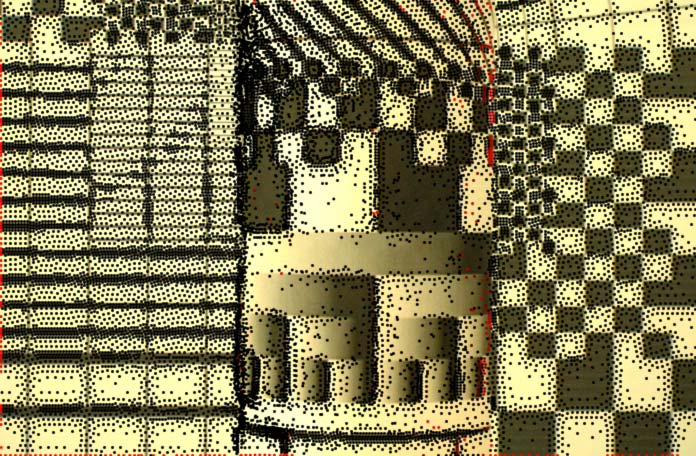
32 Optical Flow Results

33 Particle Video Algorithm
34 Particle Video Steps
35 Particle Propagation Forward propagation: Particles in occluded regions are not propagated.
![Particle Linking Delaunay Triangulation [Lischinksi 1994]](/docs-images/95/123579851/images/36-0.jpg "Create link if Delaunay edge exists in current frame or")
36 Particle Linking Delaunay Triangulation [Lischinksi 1994] Create link if Delaunay edge exists in current frame or adjacent frame
37 Particle Linking Link Weighting based on Flow Gradient (lighter = stronger)

38 Particle Linking
39 Particle Optimization Optimization objective function:





40 Particle Optimization: Data Data term: Brightness Green - Red Green - Blue x Gradient y Gradient
41 Particle Optimization: Data Data term: Observed Channel Value Filtered Channel Value 150 Channel Value Frame Index 35
42 Particle Optimization: Distortion Distortion term:
43 Particle Optimization Loop until convergence: Solve system for dx i (t), dy i (t) using SOR: x i (t) x i (t) + dx i (t) y i (t) y i (t) + dy i (t) Update link weights, etc. (see paper for more details)
44 Particle Pruning 50 Particle Energy Threshold Time
45 Particle Pruning 50 Particle Energy Threshold Time Above Threshold: Deactivate
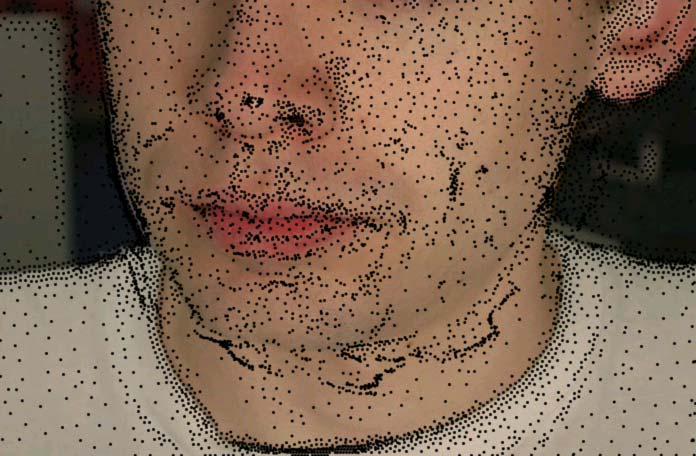
46 Particle Addition Particle Placement

47 Particle Addition Scale Map
48 Particle Video Algorithm











49 Evaluation Videos

50 Results / Evaluation Construct videos that return to the start frame: 1, 2, 3,, N-1, N, N-1, 3, 2, 1
51 Results / Evaluation Particle distance: red Concatenated flow distance: green Fraction surviving: yellow
52 Results / Evaluation
53 Results / Evaluation
54 Results / Evaluation
55 Results / Evaluation
56 Results / Evaluation
57 Results / Evaluation
58 Results / Evaluation

59 Results / Evaluation

60 Failure Modes

61 Failure Modes
62 Limitations / Future Work Issue: occlusion handling Possible solution: analyze local motion histories to distinguish good/bad distortion Issue: flow dependence Possible solution: hybrid flow / particle optimization
63 Limitations / Future Work Issue: appearance changes due to reflectance and scaling Possible solution: invariant feature descriptors for particles away from occlusions Other areas of exploration: Faster algorithms (currently 40 seconds/frame) Geometric constraints Batch particle positioning Evaluation on synthetic sequences
64 Summary Particles can represent complex motion and geometry Particle representation is useful for application algorithms Different from other representations (vector fields, rigid components, layers, tracked feature patches)
65 More Info Peter Sand and Seth Teller. Particle Video: Long-Range Motion Estimation using Point Trajectories, CVPR Thanks: William Freeman, Berthold Horn, Matt Brand, Bryt Bradley, Tom Buehler, Frédo Durand, Jovan Popović, the Graphics Group, CSAIL, EECS, MIT
Joint Inference in Image Databases via Dense Correspondence. Michael Rubinstein MIT CSAIL (while interning at Microsoft Research)
") Joint Inference in Image Databases via Dense Correspondence Michael Rubinstein MIT CSAIL (while interning at Microsoft Research) My work Throughout the year (and my PhD thesis): Temporal Video Analysis
Joint Inference in Image Databases via Dense Correspondence Michael Rubinstein MIT CSAIL (while interning at Microsoft Research) My work Throughout the year (and my PhD thesis): Temporal Video Analysis
Overview. Video. Overview 4/7/2008. Optical flow. Why estimate motion? Motion estimation: Optical flow. Motion Magnification Colorization.
 Overview Video Optical flow Motion Magnification Colorization Lecture 9 Optical flow Motion Magnification Colorization Overview Optical flow Combination of slides from Rick Szeliski, Steve Seitz, Alyosha
Overview Video Optical flow Motion Magnification Colorization Lecture 9 Optical flow Motion Magnification Colorization Overview Optical flow Combination of slides from Rick Szeliski, Steve Seitz, Alyosha
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
Motion Estimation (II) Ce Liu Microsoft Research New England
 Ce Liu Microsoft Research New England") Motion Estimation (II) Ce Liu celiu@microsoft.com Microsoft Research New England Last time Motion perception Motion representation Parametric motion: Lucas-Kanade T I x du dv = I x I T x I y I x T I y
Motion Estimation (II) Ce Liu celiu@microsoft.com Microsoft Research New England Last time Motion perception Motion representation Parametric motion: Lucas-Kanade T I x du dv = I x I T x I y I x T I y
Particle Tracking. For Bulk Material Handling Systems Using DEM Models. By: Jordan Pease
 Particle Tracking For Bulk Material Handling Systems Using DEM Models By: Jordan Pease Introduction Motivation for project Particle Tracking Application to DEM models Experimental Results Future Work References
Particle Tracking For Bulk Material Handling Systems Using DEM Models By: Jordan Pease Introduction Motivation for project Particle Tracking Application to DEM models Experimental Results Future Work References
Large Displacement Optical Flow & Applications
 Large Displacement Optical Flow & Applications Narayanan Sundaram, Kurt Keutzer (Parlab) In collaboration with Thomas Brox (University of Freiburg) Michael Tao (University of California Berkeley) Parlab
Large Displacement Optical Flow & Applications Narayanan Sundaram, Kurt Keutzer (Parlab) In collaboration with Thomas Brox (University of Freiburg) Michael Tao (University of California Berkeley) Parlab
A Gentle Introduction to Bilateral Filtering and its Applications 10/10: Conclusions
 A Gentle Introduction to Bilateral Filtering and its Applications 10/10: Conclusions Jack Tumblin EECS, Northwestern University The Bilateral Filter As Simple as Weights from two Gaussian Functions; Has
A Gentle Introduction to Bilateral Filtering and its Applications 10/10: Conclusions Jack Tumblin EECS, Northwestern University The Bilateral Filter As Simple as Weights from two Gaussian Functions; Has
Chapter 9 Object Tracking an Overview
 Chapter 9 Object Tracking an Overview The output of the background subtraction algorithm, described in the previous chapter, is a classification (segmentation) of pixels into foreground pixels (those belonging
Chapter 9 Object Tracking an Overview The output of the background subtraction algorithm, described in the previous chapter, is a classification (segmentation) of pixels into foreground pixels (those belonging
Video Enhancement for Sports
 Video Enhancement for Sports Frédo Durand, William Freeman, John Guttag, Guha Balakrishnan, Gaurav Chaurasia, Myers Davis, Michael Gharbi, Luke Anderson, Dilip Krishnan, Daniel Zoran, Neal Wadhawa MIT
Video Enhancement for Sports Frédo Durand, William Freeman, John Guttag, Guha Balakrishnan, Gaurav Chaurasia, Myers Davis, Michael Gharbi, Luke Anderson, Dilip Krishnan, Daniel Zoran, Neal Wadhawa MIT
Representing Moving Images with Layers. J. Y. Wang and E. H. Adelson MIT Media Lab
 Representing Moving Images with Layers J. Y. Wang and E. H. Adelson MIT Media Lab Goal Represent moving images with sets of overlapping layers Layers are ordered in depth and occlude each other Velocity
Representing Moving Images with Layers J. Y. Wang and E. H. Adelson MIT Media Lab Goal Represent moving images with sets of overlapping layers Layers are ordered in depth and occlude each other Velocity
A Frequency Analysis of Light Transport
 A Frequency Analysis of Light Transport Frédo Durand MIT CSAIL With Nicolas Holzschuch, Cyril Soler, Eric Chan & Francois Sillion Artis Gravir/Imag-Inria & MIT CSAIL Our research 3D rendering Light transport
A Frequency Analysis of Light Transport Frédo Durand MIT CSAIL With Nicolas Holzschuch, Cyril Soler, Eric Chan & Francois Sillion Artis Gravir/Imag-Inria & MIT CSAIL Our research 3D rendering Light transport
Robust Model-Free Tracking of Non-Rigid Shape. Abstract
 Robust Model-Free Tracking of Non-Rigid Shape Lorenzo Torresani Stanford University ltorresa@cs.stanford.edu Christoph Bregler New York University chris.bregler@nyu.edu New York University CS TR2003-840
Robust Model-Free Tracking of Non-Rigid Shape Lorenzo Torresani Stanford University ltorresa@cs.stanford.edu Christoph Bregler New York University chris.bregler@nyu.edu New York University CS TR2003-840
Optimal Denoising of Natural Images and their Multiscale Geometry and Density
 Optimal Denoising of Natural Images and their Multiscale Geometry and Density Department of Computer Science and Applied Mathematics Weizmann Institute of Science, Israel. Joint work with Anat Levin (WIS),
Optimal Denoising of Natural Images and their Multiscale Geometry and Density Department of Computer Science and Applied Mathematics Weizmann Institute of Science, Israel. Joint work with Anat Levin (WIS),
Multi-stable Perception. Necker Cube
 Multi-stable Perception Necker Cube Spinning dancer illusion, Nobuyuki Kayahara Multiple view geometry Stereo vision Epipolar geometry Lowe Hartley and Zisserman Depth map extraction Essential matrix
Multi-stable Perception Necker Cube Spinning dancer illusion, Nobuyuki Kayahara Multiple view geometry Stereo vision Epipolar geometry Lowe Hartley and Zisserman Depth map extraction Essential matrix
Notes 9: Optical Flow
 Course 049064: Variational Methods in Image Processing Notes 9: Optical Flow Guy Gilboa 1 Basic Model 1.1 Background Optical flow is a fundamental problem in computer vision. The general goal is to find
Course 049064: Variational Methods in Image Processing Notes 9: Optical Flow Guy Gilboa 1 Basic Model 1.1 Background Optical flow is a fundamental problem in computer vision. The general goal is to find
Segmentation and Tracking of Partial Planar Templates
 Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Motion Segmentation at Any Speed
 British Machine Vision Conference (BMVC) Edinburgh, Scotland, September 2006 Motion Segmentation at Any Speed Shrinivas J. Pundlik and Stanley T. Birchfield Electrical and Computer Engineering Department
British Machine Vision Conference (BMVC) Edinburgh, Scotland, September 2006 Motion Segmentation at Any Speed Shrinivas J. Pundlik and Stanley T. Birchfield Electrical and Computer Engineering Department
Multi-View Stereo for Static and Dynamic Scenes
 Multi-View Stereo for Static and Dynamic Scenes Wolfgang Burgard Jan 6, 2010 Main references Yasutaka Furukawa and Jean Ponce, Accurate, Dense and Robust Multi-View Stereopsis, 2007 C.L. Zitnick, S.B.
Multi-View Stereo for Static and Dynamic Scenes Wolfgang Burgard Jan 6, 2010 Main references Yasutaka Furukawa and Jean Ponce, Accurate, Dense and Robust Multi-View Stereopsis, 2007 C.L. Zitnick, S.B.
Super-Resolution. Many slides from Miki Elad Technion Yosi Rubner RTC and more
 Super-Resolution Many slides from Mii Elad Technion Yosi Rubner RTC and more 1 Example - Video 53 images, ratio 1:4 2 Example Surveillance 40 images ratio 1:4 3 Example Enhance Mosaics 4 5 Super-Resolution
Super-Resolution Many slides from Mii Elad Technion Yosi Rubner RTC and more 1 Example - Video 53 images, ratio 1:4 2 Example Surveillance 40 images ratio 1:4 3 Example Enhance Mosaics 4 5 Super-Resolution
COMPUTER VISION > OPTICAL FLOW UTRECHT UNIVERSITY RONALD POPPE
 COMPUTER VISION 2017-2018 > OPTICAL FLOW UTRECHT UNIVERSITY RONALD POPPE OUTLINE Optical flow Lucas-Kanade Horn-Schunck Applications of optical flow Optical flow tracking Histograms of oriented flow Assignment
COMPUTER VISION 2017-2018 > OPTICAL FLOW UTRECHT UNIVERSITY RONALD POPPE OUTLINE Optical flow Lucas-Kanade Horn-Schunck Applications of optical flow Optical flow tracking Histograms of oriented flow Assignment
Part II: Modeling Aspects
 Yosemite test sequence Illumination changes Motion discontinuities Variational Optical Flow Estimation Part II: Modeling Aspects Discontinuity Di ti it preserving i smoothness th tterms Robust data terms
Yosemite test sequence Illumination changes Motion discontinuities Variational Optical Flow Estimation Part II: Modeling Aspects Discontinuity Di ti it preserving i smoothness th tterms Robust data terms
Structured light 3D reconstruction
 Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Dense Correspondence and Its Applications
 Dense Correspondence and Its Applications CVFX @ NTHU 28 May 2015 Outline Dense Correspondence Optical ow Epipolar Geometry Stereo Correspondence Why dense correspondence? Features are sparse Some applications
Dense Correspondence and Its Applications CVFX @ NTHU 28 May 2015 Outline Dense Correspondence Optical ow Epipolar Geometry Stereo Correspondence Why dense correspondence? Features are sparse Some applications
Dynamic Shape Tracking via Region Matching
 Dynamic Shape Tracking via Region Matching Ganesh Sundaramoorthi Asst. Professor of EE and AMCS KAUST (Joint work with Yanchao Yang) The Problem: Shape Tracking Given: exact object segmentation in frame1
Dynamic Shape Tracking via Region Matching Ganesh Sundaramoorthi Asst. Professor of EE and AMCS KAUST (Joint work with Yanchao Yang) The Problem: Shape Tracking Given: exact object segmentation in frame1
Schedule. Tuesday, May 10: Thursday, May 12: Motion microscopy, separating shading and paint min. student project presentations, projects due.
 Schedule Tuesday, May 10: Motion microscopy, separating shading and paint Thursday, May 12: 5-10 min. student project presentations, projects due. Computer vision for photography Bill Freeman Computer
Schedule Tuesday, May 10: Motion microscopy, separating shading and paint Thursday, May 12: 5-10 min. student project presentations, projects due. Computer vision for photography Bill Freeman Computer
Final Review CMSC 733 Fall 2014
 Final Review CMSC 733 Fall 2014 We have covered a lot of material in this course. One way to organize this material is around a set of key equations and algorithms. You should be familiar with all of these,
Final Review CMSC 733 Fall 2014 We have covered a lot of material in this course. One way to organize this material is around a set of key equations and algorithms. You should be familiar with all of these,
Robust Trajectory-Space TV-L1 Optical Flow for Non-rigid Sequences
 Robust Trajectory-Space TV-L1 Optical Flow for Non-rigid Sequences Ravi Garg, Anastasios Roussos, and Lourdes Agapito Queen Mary University of London, Mile End Road, London E1 4NS, UK Abstract. This paper
Robust Trajectory-Space TV-L1 Optical Flow for Non-rigid Sequences Ravi Garg, Anastasios Roussos, and Lourdes Agapito Queen Mary University of London, Mile End Road, London E1 4NS, UK Abstract. This paper
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 11 140311 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Motion Analysis Motivation Differential Motion Optical
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 11 140311 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Motion Analysis Motivation Differential Motion Optical
Using temporal seeding to constrain the disparity search range in stereo matching
 Using temporal seeding to constrain the disparity search range in stereo matching Thulani Ndhlovu Mobile Intelligent Autonomous Systems CSIR South Africa Email: tndhlovu@csir.co.za Fred Nicolls Department
Using temporal seeding to constrain the disparity search range in stereo matching Thulani Ndhlovu Mobile Intelligent Autonomous Systems CSIR South Africa Email: tndhlovu@csir.co.za Fred Nicolls Department
Video Completion via Spatio-temporally Consistent Motion Inpainting
 Express Paper Video Completion via Spatio-temporally Consistent Motion Inpainting Menandro Roxas 1,a) Takaaki Shiratori 2,b) Katsushi Ikeuchi 1,c) Received: April 25, 2014, Accepted: May 19, 2014, Released:
Express Paper Video Completion via Spatio-temporally Consistent Motion Inpainting Menandro Roxas 1,a) Takaaki Shiratori 2,b) Katsushi Ikeuchi 1,c) Received: April 25, 2014, Accepted: May 19, 2014, Released:
Motion Analysis. Motion analysis. Now we will talk about. Differential Motion Analysis. Motion analysis. Difference Pictures
 Now we will talk about Motion Analysis Motion analysis Motion analysis is dealing with three main groups of motionrelated problems: Motion detection Moving object detection and location. Derivation of
Now we will talk about Motion Analysis Motion analysis Motion analysis is dealing with three main groups of motionrelated problems: Motion detection Moving object detection and location. Derivation of
3D Computer Vision. Structured Light II. Prof. Didier Stricker. Kaiserlautern University.
 3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
Subpixel accurate refinement of disparity maps using stereo correspondences
 Subpixel accurate refinement of disparity maps using stereo correspondences Matthias Demant Lehrstuhl für Mustererkennung, Universität Freiburg Outline 1 Introduction and Overview 2 Refining the Cost Volume
Subpixel accurate refinement of disparity maps using stereo correspondences Matthias Demant Lehrstuhl für Mustererkennung, Universität Freiburg Outline 1 Introduction and Overview 2 Refining the Cost Volume
IMAGE RECONSTRUCTION WITH SUPER RESOLUTION
 INTERNATIONAL JOURNAL OF RESEARCH IN COMPUTER APPLICATIONS AND ROBOTICS ISSN 2320-7345 IMAGE RECONSTRUCTION WITH SUPER RESOLUTION B.Vijitha 1, K.SrilathaReddy 2 1 Asst. Professor, Department of Computer
INTERNATIONAL JOURNAL OF RESEARCH IN COMPUTER APPLICATIONS AND ROBOTICS ISSN 2320-7345 IMAGE RECONSTRUCTION WITH SUPER RESOLUTION B.Vijitha 1, K.SrilathaReddy 2 1 Asst. Professor, Department of Computer
How does bilateral filter relates with other methods?
 A Gentle Introduction to Bilateral Filtering and its Applications How does bilateral filter relates with other methods? Fredo Durand (MIT CSAIL) Slides by Pierre Kornprobst (INRIA) 0:35 Many people worked
A Gentle Introduction to Bilateral Filtering and its Applications How does bilateral filter relates with other methods? Fredo Durand (MIT CSAIL) Slides by Pierre Kornprobst (INRIA) 0:35 Many people worked
CSE 190A Super-Resolution
 CSE 190A SuperResolution Thomas Cassey EAP Student Department of Computer Science University of California San Diego tcassey@ucsd.edu Abstract This paper details the implementation of a multiframe superresolution
CSE 190A SuperResolution Thomas Cassey EAP Student Department of Computer Science University of California San Diego tcassey@ucsd.edu Abstract This paper details the implementation of a multiframe superresolution
Recap: Features and filters. Recap: Grouping & fitting. Now: Multiple views 10/29/2008. Epipolar geometry & stereo vision. Why multiple views?
 Recap: Features and filters Epipolar geometry & stereo vision Tuesday, Oct 21 Kristen Grauman UT-Austin Transforming and describing images; textures, colors, edges Recap: Grouping & fitting Now: Multiple
Recap: Features and filters Epipolar geometry & stereo vision Tuesday, Oct 21 Kristen Grauman UT-Austin Transforming and describing images; textures, colors, edges Recap: Grouping & fitting Now: Multiple
Segmentation and Grouping April 19 th, 2018
 Segmentation and Grouping April 19 th, 2018 Yong Jae Lee UC Davis Features and filters Transforming and describing images; textures, edges 2 Grouping and fitting [fig from Shi et al] Clustering, segmentation,
Segmentation and Grouping April 19 th, 2018 Yong Jae Lee UC Davis Features and filters Transforming and describing images; textures, edges 2 Grouping and fitting [fig from Shi et al] Clustering, segmentation,
LOCAL-GLOBAL OPTICAL FLOW FOR IMAGE REGISTRATION
 LOCAL-GLOBAL OPTICAL FLOW FOR IMAGE REGISTRATION Ammar Zayouna Richard Comley Daming Shi Middlesex University School of Engineering and Information Sciences Middlesex University, London NW4 4BT, UK A.Zayouna@mdx.ac.uk
LOCAL-GLOBAL OPTICAL FLOW FOR IMAGE REGISTRATION Ammar Zayouna Richard Comley Daming Shi Middlesex University School of Engineering and Information Sciences Middlesex University, London NW4 4BT, UK A.Zayouna@mdx.ac.uk
Optical Flow Estimation versus Motion Estimation
 Optical Flow Estimation versus Motion Estimation A. Sellent D. Kondermann S. Simon S. Baker G. Dedeoglu O. Erdler P. Parsonage C. Unger W. Niehsen August 9, 2012 1 Image based motion estimation Optical
Optical Flow Estimation versus Motion Estimation A. Sellent D. Kondermann S. Simon S. Baker G. Dedeoglu O. Erdler P. Parsonage C. Unger W. Niehsen August 9, 2012 1 Image based motion estimation Optical
Image processing and features
 Image processing and features Gabriele Bleser gabriele.bleser@dfki.de Thanks to Harald Wuest, Folker Wientapper and Marc Pollefeys Introduction Previous lectures: geometry Pose estimation Epipolar geometry
Image processing and features Gabriele Bleser gabriele.bleser@dfki.de Thanks to Harald Wuest, Folker Wientapper and Marc Pollefeys Introduction Previous lectures: geometry Pose estimation Epipolar geometry
CS 4495 Computer Vision Motion and Optic Flow
 CS 4495 Computer Vision Aaron Bobick School of Interactive Computing Administrivia PS4 is out, due Sunday Oct 27 th. All relevant lectures posted Details about Problem Set: You may *not* use built in Harris
CS 4495 Computer Vision Aaron Bobick School of Interactive Computing Administrivia PS4 is out, due Sunday Oct 27 th. All relevant lectures posted Details about Problem Set: You may *not* use built in Harris
December 16, To the Graduate School:
 December 16, 2005 To the Graduate School: This thesis entitled Motion Segmentation at Any Speed and written by Shrinivas J. Pundlik is presented to the Graduate School of Clemson University. I recommend
December 16, 2005 To the Graduate School: This thesis entitled Motion Segmentation at Any Speed and written by Shrinivas J. Pundlik is presented to the Graduate School of Clemson University. I recommend
Video Google: A Text Retrieval Approach to Object Matching in Videos
 Video Google: A Text Retrieval Approach to Object Matching in Videos Josef Sivic, Frederik Schaffalitzky, Andrew Zisserman Visual Geometry Group University of Oxford The vision Enable video, e.g. a feature
Video Google: A Text Retrieval Approach to Object Matching in Videos Josef Sivic, Frederik Schaffalitzky, Andrew Zisserman Visual Geometry Group University of Oxford The vision Enable video, e.g. a feature
Leow Wee Kheng CS4243 Computer Vision and Pattern Recognition. Motion Tracking. CS4243 Motion Tracking 1
 Leow Wee Kheng CS4243 Computer Vision and Pattern Recognition Motion Tracking CS4243 Motion Tracking 1 Changes are everywhere! CS4243 Motion Tracking 2 Illumination change CS4243 Motion Tracking 3 Shape
Leow Wee Kheng CS4243 Computer Vision and Pattern Recognition Motion Tracking CS4243 Motion Tracking 1 Changes are everywhere! CS4243 Motion Tracking 2 Illumination change CS4243 Motion Tracking 3 Shape
Stereo Vision. MAN-522 Computer Vision
 Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
3D Shape Recovery of Smooth Surfaces: Dropping the Fixed Viewpoint Assumption
 IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL., NO., 1 3D Shape Recovery of Smooth Surfaces: Dropping the Fixed Viewpoint Assumption Yael Moses Member, IEEE and Ilan Shimshoni Member,
IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL., NO., 1 3D Shape Recovery of Smooth Surfaces: Dropping the Fixed Viewpoint Assumption Yael Moses Member, IEEE and Ilan Shimshoni Member,
Feature Tracking and Optical Flow
 Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who 1 in turn adapted slides from Steve Seitz, Rick Szeliski,
Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who 1 in turn adapted slides from Steve Seitz, Rick Szeliski,
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Learning Articulated Skeletons From Motion
 Learning Articulated Skeletons From Motion Danny Tarlow University of Toronto, Machine Learning with David Ross and Richard Zemel (and Brendan Frey) August 6, 2007 Point Light Displays It's easy for humans
Learning Articulated Skeletons From Motion Danny Tarlow University of Toronto, Machine Learning with David Ross and Richard Zemel (and Brendan Frey) August 6, 2007 Point Light Displays It's easy for humans
Motion Estimation. There are three main types (or applications) of motion estimation:
 of motion estimation:") Members: D91922016 朱威達 R93922010 林聖凱 R93922044 謝俊瑋 Motion Estimation There are three main types (or applications) of motion estimation: Parametric motion (image alignment) The main idea of parametric motion
Members: D91922016 朱威達 R93922010 林聖凱 R93922044 謝俊瑋 Motion Estimation There are three main types (or applications) of motion estimation: Parametric motion (image alignment) The main idea of parametric motion
CS-465 Computer Vision
 CS-465 Computer Vision Nazar Khan PUCIT 9. Optic Flow Optic Flow Nazar Khan Computer Vision 2 / 25 Optic Flow Nazar Khan Computer Vision 3 / 25 Optic Flow Where does pixel (x, y) in frame z move to in
CS-465 Computer Vision Nazar Khan PUCIT 9. Optic Flow Optic Flow Nazar Khan Computer Vision 2 / 25 Optic Flow Nazar Khan Computer Vision 3 / 25 Optic Flow Where does pixel (x, y) in frame z move to in
ECE Digital Image Processing and Introduction to Computer Vision. Outline
 ECE592-064 Digital Image Processing and Introduction to Computer Vision Depart. of ECE, NC State University Instructor: Tianfu (Matt) Wu Spring 2017 1. Recap Outline 2. Modeling Projection and Projection
ECE592-064 Digital Image Processing and Introduction to Computer Vision Depart. of ECE, NC State University Instructor: Tianfu (Matt) Wu Spring 2017 1. Recap Outline 2. Modeling Projection and Projection
Shape Matching. Brandon Smith and Shengnan Wang Computer Vision CS766 Fall 2007
 Shape Matching Brandon Smith and Shengnan Wang Computer Vision CS766 Fall 2007 Outline Introduction and Background Uses of shape matching Kinds of shape matching Support Vector Machine (SVM) Matching with
Shape Matching Brandon Smith and Shengnan Wang Computer Vision CS766 Fall 2007 Outline Introduction and Background Uses of shape matching Kinds of shape matching Support Vector Machine (SVM) Matching with
Unwarping paper: A differential geometric approach
 Unwarping paper: A differential geometric approach Nail Gumerov, Ali Zandifar, Ramani Duraiswami and Larry S. Davis March 28, 2003 Outline Motivation Statement of the Problem Previous Works Definition
Unwarping paper: A differential geometric approach Nail Gumerov, Ali Zandifar, Ramani Duraiswami and Larry S. Davis March 28, 2003 Outline Motivation Statement of the Problem Previous Works Definition
The SIFT (Scale Invariant Feature
 The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
Optical Flow CS 637. Fuxin Li. With materials from Kristen Grauman, Richard Szeliski, S. Narasimhan, Deqing Sun
 Optical Flow CS 637 Fuxin Li With materials from Kristen Grauman, Richard Szeliski, S. Narasimhan, Deqing Sun Motion and perceptual organization Sometimes, motion is the only cue Motion and perceptual
Optical Flow CS 637 Fuxin Li With materials from Kristen Grauman, Richard Szeliski, S. Narasimhan, Deqing Sun Motion and perceptual organization Sometimes, motion is the only cue Motion and perceptual
A Keypoint Descriptor Inspired by Retinal Computation
 A Keypoint Descriptor Inspired by Retinal Computation Bongsoo Suh, Sungjoon Choi, Han Lee Stanford University {bssuh,sungjoonchoi,hanlee}@stanford.edu Abstract. The main goal of our project is to implement
A Keypoint Descriptor Inspired by Retinal Computation Bongsoo Suh, Sungjoon Choi, Han Lee Stanford University {bssuh,sungjoonchoi,hanlee}@stanford.edu Abstract. The main goal of our project is to implement
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 19: Optical flow http://en.wikipedia.org/wiki/barberpole_illusion Readings Szeliski, Chapter 8.4-8.5 Announcements Project 2b due Tuesday, Nov 2 Please sign
CS6670: Computer Vision Noah Snavely Lecture 19: Optical flow http://en.wikipedia.org/wiki/barberpole_illusion Readings Szeliski, Chapter 8.4-8.5 Announcements Project 2b due Tuesday, Nov 2 Please sign
Super-resolution on Text Image Sequences
 November 4, 2004 Outline Outline Geometric Distortion Optical/Motion Blurring Down-Sampling Total Variation Basic Idea Outline Geometric Distortion Optical/Motion Blurring Down-Sampling No optical/image
November 4, 2004 Outline Outline Geometric Distortion Optical/Motion Blurring Down-Sampling Total Variation Basic Idea Outline Geometric Distortion Optical/Motion Blurring Down-Sampling No optical/image
arxiv: v1 [cs.cv] 28 Sep 2018
![arxiv: v1 [cs.cv] 28 Sep 2018](/thumbs/93/113542646.jpg "arxiv: v1 [cs.cv] 28 Sep 2018") Camera Pose Estimation from Sequence of Calibrated Images arxiv:1809.11066v1 [cs.cv] 28 Sep 2018 Jacek Komorowski 1 and Przemyslaw Rokita 2 1 Maria Curie-Sklodowska University, Institute of Computer Science,
Camera Pose Estimation from Sequence of Calibrated Images arxiv:1809.11066v1 [cs.cv] 28 Sep 2018 Jacek Komorowski 1 and Przemyslaw Rokita 2 1 Maria Curie-Sklodowska University, Institute of Computer Science,
Dense Image-based Motion Estimation Algorithms & Optical Flow
 Dense mage-based Motion Estimation Algorithms & Optical Flow Video A video is a sequence of frames captured at different times The video data is a function of v time (t) v space (x,y) ntroduction to motion
Dense mage-based Motion Estimation Algorithms & Optical Flow Video A video is a sequence of frames captured at different times The video data is a function of v time (t) v space (x,y) ntroduction to motion
EE 264: Image Processing and Reconstruction. Image Motion Estimation I. EE 264: Image Processing and Reconstruction. Outline
 1 Image Motion Estimation I 2 Outline 1. Introduction to Motion 2. Why Estimate Motion? 3. Global vs. Local Motion 4. Block Motion Estimation 5. Optical Flow Estimation Basics 6. Optical Flow Estimation
1 Image Motion Estimation I 2 Outline 1. Introduction to Motion 2. Why Estimate Motion? 3. Global vs. Local Motion 4. Block Motion Estimation 5. Optical Flow Estimation Basics 6. Optical Flow Estimation
Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation
 Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
Stereo. Outline. Multiple views 3/29/2017. Thurs Mar 30 Kristen Grauman UT Austin. Multi-view geometry, matching, invariant features, stereo vision
 Stereo Thurs Mar 30 Kristen Grauman UT Austin Outline Last time: Human stereopsis Epipolar geometry and the epipolar constraint Case example with parallel optical axes General case with calibrated cameras
Stereo Thurs Mar 30 Kristen Grauman UT Austin Outline Last time: Human stereopsis Epipolar geometry and the epipolar constraint Case example with parallel optical axes General case with calibrated cameras
Ruch (Motion) Rozpoznawanie Obrazów Krzysztof Krawiec Instytut Informatyki, Politechnika Poznańska. Krzysztof Krawiec IDSS
 Rozpoznawanie Obrazów Krzysztof Krawiec Instytut Informatyki, Politechnika Poznańska. Krzysztof Krawiec IDSS") Ruch (Motion) Rozpoznawanie Obrazów Krzysztof Krawiec Instytut Informatyki, Politechnika Poznańska 1 Krzysztof Krawiec IDSS 2 The importance of visual motion Adds entirely new (temporal) dimension to visual
Ruch (Motion) Rozpoznawanie Obrazów Krzysztof Krawiec Instytut Informatyki, Politechnika Poznańska 1 Krzysztof Krawiec IDSS 2 The importance of visual motion Adds entirely new (temporal) dimension to visual
Supplementary Material The Best of Both Worlds: Combining CNNs and Geometric Constraints for Hierarchical Motion Segmentation
 Supplementary Material The Best of Both Worlds: Combining CNNs and Geometric Constraints for Hierarchical Motion Segmentation Pia Bideau Aruni RoyChowdhury Rakesh R Menon Erik Learned-Miller University
Supplementary Material The Best of Both Worlds: Combining CNNs and Geometric Constraints for Hierarchical Motion Segmentation Pia Bideau Aruni RoyChowdhury Rakesh R Menon Erik Learned-Miller University
Probabilistic Tracking and Reconstruction of 3D Human Motion in Monocular Video Sequences
 Probabilistic Tracking and Reconstruction of 3D Human Motion in Monocular Video Sequences Presentation of the thesis work of: Hedvig Sidenbladh, KTH Thesis opponent: Prof. Bill Freeman, MIT Thesis supervisors
Probabilistic Tracking and Reconstruction of 3D Human Motion in Monocular Video Sequences Presentation of the thesis work of: Hedvig Sidenbladh, KTH Thesis opponent: Prof. Bill Freeman, MIT Thesis supervisors
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Flow Estimation. Min Bai. February 8, University of Toronto. Min Bai (UofT) Flow Estimation February 8, / 47
 Flow Estimation February 8, / 47") Flow Estimation Min Bai University of Toronto February 8, 2016 Min Bai (UofT) Flow Estimation February 8, 2016 1 / 47 Outline Optical Flow - Continued Min Bai (UofT) Flow Estimation February 8, 2016 2
Flow Estimation Min Bai University of Toronto February 8, 2016 Min Bai (UofT) Flow Estimation February 8, 2016 1 / 47 Outline Optical Flow - Continued Min Bai (UofT) Flow Estimation February 8, 2016 2
Local Occlusion Detection Under Deformations Using Topological Invariants
 Local Occlusion Detection Under Deformations Using Topological Invariants Edgar Lobaton 1, Ram Vasudevan 2, Ruzena Bajcsy 2, and Ron Alterovitz 1 1 Department of Computer Science University of North Carolina,
Local Occlusion Detection Under Deformations Using Topological Invariants Edgar Lobaton 1, Ram Vasudevan 2, Ruzena Bajcsy 2, and Ron Alterovitz 1 1 Department of Computer Science University of North Carolina,
Volume Illumination & Vector Field Visualisation
 Volume Illumination & Vector Field Visualisation Visualisation Lecture 11 Institute for Perception, Action & Behaviour School of Informatics Volume Illumination & Vector Vis. 1 Previously : Volume Rendering
Volume Illumination & Vector Field Visualisation Visualisation Lecture 11 Institute for Perception, Action & Behaviour School of Informatics Volume Illumination & Vector Vis. 1 Previously : Volume Rendering
A Robust Facial Feature Point Tracker using Graphical Models
 A Robust Facial Feature Point Tracker using Graphical Models Serhan Coşar, Müjdat Çetin, Aytül Erçil Sabancı University Faculty of Engineering and Natural Sciences Orhanlı- Tuzla, 34956 İstanbul, TURKEY
A Robust Facial Feature Point Tracker using Graphical Models Serhan Coşar, Müjdat Çetin, Aytül Erçil Sabancı University Faculty of Engineering and Natural Sciences Orhanlı- Tuzla, 34956 İstanbul, TURKEY
Visuelle Perzeption für Mensch- Maschine Schnittstellen
 Visuelle Perzeption für Mensch- Maschine Schnittstellen Vorlesung, WS 2009 Prof. Dr. Rainer Stiefelhagen Dr. Edgar Seemann Institut für Anthropomatik Universität Karlsruhe (TH) http://cvhci.ira.uka.de
Visuelle Perzeption für Mensch- Maschine Schnittstellen Vorlesung, WS 2009 Prof. Dr. Rainer Stiefelhagen Dr. Edgar Seemann Institut für Anthropomatik Universität Karlsruhe (TH) http://cvhci.ira.uka.de
Texture Synthesis. Darren Green (
 Texture Synthesis Darren Green (www.darrensworld.com) 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 Texture Texture depicts spatially repeating patterns Many natural phenomena are textures
Texture Synthesis Darren Green (www.darrensworld.com) 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 Texture Texture depicts spatially repeating patterns Many natural phenomena are textures
Outline. Segmentation & Grouping. Examples of grouping in vision. Grouping in vision. Grouping in vision 2/9/2011. CS 376 Lecture 7 Segmentation 1
 Outline What are grouping problems in vision? Segmentation & Grouping Wed, Feb 9 Prof. UT-Austin Inspiration from human perception Gestalt properties Bottom-up segmentation via clustering Algorithms: Mode
Outline What are grouping problems in vision? Segmentation & Grouping Wed, Feb 9 Prof. UT-Austin Inspiration from human perception Gestalt properties Bottom-up segmentation via clustering Algorithms: Mode
Find the Correspondences
 Advanced Topics in BioImage Analysis - 3. Find the Correspondences from Registration to Motion Estimation CellNetworks Math-Clinic Qi Gao 03.02.2017 Math-Clinic core facility Provide services on bioinformatics
Advanced Topics in BioImage Analysis - 3. Find the Correspondences from Registration to Motion Estimation CellNetworks Math-Clinic Qi Gao 03.02.2017 Math-Clinic core facility Provide services on bioinformatics
Model-based Motion Capture for Crash Test Video Analysis
 Model-based Motion Capture for Crash Test Video Analysis Juergen Gall 1, Bodo Rosenhahn 1, Stefan Gehrig 2, and Hans-Peter Seidel 1 1 Max-Planck-Institute for Computer Science, Campus E1 4, 66123 Saarbrücken,
Model-based Motion Capture for Crash Test Video Analysis Juergen Gall 1, Bodo Rosenhahn 1, Stefan Gehrig 2, and Hans-Peter Seidel 1 1 Max-Planck-Institute for Computer Science, Campus E1 4, 66123 Saarbrücken,
CS 2770: Computer Vision. Edges and Segments. Prof. Adriana Kovashka University of Pittsburgh February 21, 2017
 CS 2770: Computer Vision Edges and Segments Prof. Adriana Kovashka University of Pittsburgh February 21, 2017 Edges vs Segments Figure adapted from J. Hays Edges vs Segments Edges More low-level Don t
CS 2770: Computer Vision Edges and Segments Prof. Adriana Kovashka University of Pittsburgh February 21, 2017 Edges vs Segments Figure adapted from J. Hays Edges vs Segments Edges More low-level Don t
12/07/17. Video Magnification. Magritte, The Listening Room. Computational Photography Derek Hoiem, University of Illinois
 Video Magnification 12/07/17 Magritte, The Listening Room Computational Photography Derek Hoiem, University of Illinois Today 1. Video Magnification Lagrangian (point tracking) approach Eulerian (signal
Video Magnification 12/07/17 Magritte, The Listening Room Computational Photography Derek Hoiem, University of Illinois Today 1. Video Magnification Lagrangian (point tracking) approach Eulerian (signal
Depth Measurement. 2/27/12 ECEn 631
 Correspondence Depth Measurement Visual areas must be be seen by both cameras If the physical coordinates of the cameras or sizes of objects are known, depth can be measured using triangulated disparity
Correspondence Depth Measurement Visual areas must be be seen by both cameras If the physical coordinates of the cameras or sizes of objects are known, depth can be measured using triangulated disparity
Spatial track: motion modeling
 Spatial track: motion modeling Virginio Cantoni Computer Vision and Multimedia Lab Università di Pavia Via A. Ferrata 1, 27100 Pavia virginio.cantoni@unipv.it http://vision.unipv.it/va 1 Comparison between
Spatial track: motion modeling Virginio Cantoni Computer Vision and Multimedia Lab Università di Pavia Via A. Ferrata 1, 27100 Pavia virginio.cantoni@unipv.it http://vision.unipv.it/va 1 Comparison between
1 (5 max) 2 (10 max) 3 (20 max) 4 (30 max) 5 (10 max) 6 (15 extra max) total (75 max + 15 extra)
 2 (10 max) 3 (20 max) 4 (30 max) 5 (10 max) 6 (15 extra max) total (75 max + 15 extra)") Mierm Exam CS223b Stanford CS223b Computer Vision, Winter 2004 Feb. 18, 2004 Full Name: Email: This exam has 7 pages. Make sure your exam is not missing any sheets, and write your name on every page. The
Mierm Exam CS223b Stanford CS223b Computer Vision, Winter 2004 Feb. 18, 2004 Full Name: Email: This exam has 7 pages. Make sure your exam is not missing any sheets, and write your name on every page. The
BSB663 Image Processing Pinar Duygulu. Slides are adapted from Selim Aksoy
 BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
Image-Based Modeling and Rendering. Image-Based Modeling and Rendering. Final projects IBMR. What we have learnt so far. What IBMR is about
 Image-Based Modeling and Rendering Image-Based Modeling and Rendering MIT EECS 6.837 Frédo Durand and Seth Teller 1 Some slides courtesy of Leonard McMillan, Wojciech Matusik, Byong Mok Oh, Max Chen 2
Image-Based Modeling and Rendering Image-Based Modeling and Rendering MIT EECS 6.837 Frédo Durand and Seth Teller 1 Some slides courtesy of Leonard McMillan, Wojciech Matusik, Byong Mok Oh, Max Chen 2
Dense Lagrangian Motion Estimation with Occlusions
 Dense Lagrangian Motion Estimation with Occlusions Susanna Ricco Carlo Tomasi Duke University Durham, NC USA {sricco, tomasi}@cs.duke.edu Abstract We couple occlusion modeling and multi-frame motion estimation
Dense Lagrangian Motion Estimation with Occlusions Susanna Ricco Carlo Tomasi Duke University Durham, NC USA {sricco, tomasi}@cs.duke.edu Abstract We couple occlusion modeling and multi-frame motion estimation
Compositing a bird's eye view mosaic
 Compositing a bird's eye view mosaic Robert Laganiere School of Information Technology and Engineering University of Ottawa Ottawa, Ont KN 6N Abstract This paper describes a method that allows the composition
Compositing a bird's eye view mosaic Robert Laganiere School of Information Technology and Engineering University of Ottawa Ottawa, Ont KN 6N Abstract This paper describes a method that allows the composition
1-2 Feature-Based Image Mosaicing
 MVA'98 IAPR Workshop on Machine Vision Applications, Nov. 17-19, 1998, Makuhari, Chibq Japan 1-2 Feature-Based Image Mosaicing Naoki Chiba, Hiroshi Kano, Minoru Higashihara, Masashi Yasuda, and Masato
MVA'98 IAPR Workshop on Machine Vision Applications, Nov. 17-19, 1998, Makuhari, Chibq Japan 1-2 Feature-Based Image Mosaicing Naoki Chiba, Hiroshi Kano, Minoru Higashihara, Masashi Yasuda, and Masato
IN MANY applications, it is desirable that the acquisition
 1288 IEEE TRANSACTIONS ON CIRCUITS AND SYSTEMS FOR VIDEO TECHNOLOGY, VOL 17, NO 10, OCTOBER 2007 A Robust and Computationally Efficient Simultaneous Super-Resolution Scheme for Image Sequences Marcelo
1288 IEEE TRANSACTIONS ON CIRCUITS AND SYSTEMS FOR VIDEO TECHNOLOGY, VOL 17, NO 10, OCTOBER 2007 A Robust and Computationally Efficient Simultaneous Super-Resolution Scheme for Image Sequences Marcelo
Ping Tan. Simon Fraser University
 Ping Tan Simon Fraser University Photos vs. Videos (live photos) A good photo tells a story Stories are better told in videos Videos in the Mobile Era (mobile & share) More videos are captured by mobile
Ping Tan Simon Fraser University Photos vs. Videos (live photos) A good photo tells a story Stories are better told in videos Videos in the Mobile Era (mobile & share) More videos are captured by mobile
Lecture 19: Motion. Effect of window size 11/20/2007. Sources of error in correspondences. Review Problem set 3. Tuesday, Nov 20
 Lecture 19: Motion Review Problem set 3 Dense stereo matching Sparse stereo matching Indexing scenes Tuesda, Nov 0 Effect of window size W = 3 W = 0 Want window large enough to have sufficient intensit
Lecture 19: Motion Review Problem set 3 Dense stereo matching Sparse stereo matching Indexing scenes Tuesda, Nov 0 Effect of window size W = 3 W = 0 Want window large enough to have sufficient intensit
VC 11/12 T11 Optical Flow
 VC 11/12 T11 Optical Flow Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Miguel Tavares Coimbra Outline Optical Flow Constraint Equation Aperture
VC 11/12 T11 Optical Flow Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Miguel Tavares Coimbra Outline Optical Flow Constraint Equation Aperture
Locally Adaptive Regression Kernels with (many) Applications
 Applications") Locally Adaptive Regression Kernels with (many) Applications Peyman Milanfar EE Department University of California, Santa Cruz Joint work with Hiro Takeda, Hae Jong Seo, Xiang Zhu Outline Introduction/Motivation
Locally Adaptive Regression Kernels with (many) Applications Peyman Milanfar EE Department University of California, Santa Cruz Joint work with Hiro Takeda, Hae Jong Seo, Xiang Zhu Outline Introduction/Motivation
Welcome to 6.837! Welcome to all students: Plan for today: Introductions. Why study graphics? Team 18 s final project from 6.
 Welcome to 6.837! Welcome to all students: MIT students attending lecture today Sign the circulating sign-up sheet today Fill out web survey (on course page) ASAP TR 2 30-4pm, Room 4-163 Fall 2002 http://graphics.lcs.mit.edu/6.837/f02
Welcome to 6.837! Welcome to all students: MIT students attending lecture today Sign the circulating sign-up sheet today Fill out web survey (on course page) ASAP TR 2 30-4pm, Room 4-163 Fall 2002 http://graphics.lcs.mit.edu/6.837/f02
CS4495/6495 Introduction to Computer Vision. 3B-L3 Stereo correspondence
 CS4495/6495 Introduction to Computer Vision 3B-L3 Stereo correspondence For now assume parallel image planes Assume parallel (co-planar) image planes Assume same focal lengths Assume epipolar lines are
CS4495/6495 Introduction to Computer Vision 3B-L3 Stereo correspondence For now assume parallel image planes Assume parallel (co-planar) image planes Assume same focal lengths Assume epipolar lines are
Object and Motion Recognition using Plane Plus Parallax Displacement of Conics
 Object and Motion Recognition using Plane Plus Parallax Displacement of Conics Douglas R. Heisterkamp University of South Alabama Mobile, AL 6688-0002, USA dheister@jaguar1.usouthal.edu Prabir Bhattacharya
Object and Motion Recognition using Plane Plus Parallax Displacement of Conics Douglas R. Heisterkamp University of South Alabama Mobile, AL 6688-0002, USA dheister@jaguar1.usouthal.edu Prabir Bhattacharya
Dynamic Color Flow: A Motion-Adaptive Color Model for Object Segmentation in Video
 Dynamic Color Flow: A Motion-Adaptive Color Model for Object Segmentation in Video Xue Bai 1, Jue Wang 2, and Guillermo Sapiro 1 1 University of Minnesota, Minneapolis, MN 55455, USA 2 Adobe Systems, Seattle,
Dynamic Color Flow: A Motion-Adaptive Color Model for Object Segmentation in Video Xue Bai 1, Jue Wang 2, and Guillermo Sapiro 1 1 University of Minnesota, Minneapolis, MN 55455, USA 2 Adobe Systems, Seattle,
Visual Tracking (1) Tracking of Feature Points and Planar Rigid Objects
 Tracking of Feature Points and Planar Rigid Objects") Intelligent Control Systems Visual Tracking (1) Tracking of Feature Points and Planar Rigid Objects Shingo Kagami Graduate School of Information Sciences, Tohoku University swk(at)ic.is.tohoku.ac.jp http://www.ic.is.tohoku.ac.jp/ja/swk/
Intelligent Control Systems Visual Tracking (1) Tracking of Feature Points and Planar Rigid Objects Shingo Kagami Graduate School of Information Sciences, Tohoku University swk(at)ic.is.tohoku.ac.jp http://www.ic.is.tohoku.ac.jp/ja/swk/
Index. 3D reconstruction, point algorithm, point algorithm, point algorithm, point algorithm, 253
 Index 3D reconstruction, 123 5+1-point algorithm, 274 5-point algorithm, 260 7-point algorithm, 255 8-point algorithm, 253 affine point, 43 affine transformation, 55 affine transformation group, 55 affine
Index 3D reconstruction, 123 5+1-point algorithm, 274 5-point algorithm, 260 7-point algorithm, 255 8-point algorithm, 253 affine point, 43 affine transformation, 55 affine transformation group, 55 affine
Segmentation and Grouping April 21 st, 2015
 Segmentation and Grouping April 21 st, 2015 Yong Jae Lee UC Davis Announcements PS0 grades are up on SmartSite Please put name on answer sheet 2 Features and filters Transforming and describing images;
Segmentation and Grouping April 21 st, 2015 Yong Jae Lee UC Davis Announcements PS0 grades are up on SmartSite Please put name on answer sheet 2 Features and filters Transforming and describing images;