Probabilistic Tracking and Reconstruction of 3D Human Motion in Monocular Video Sequences
|
|
|
- August Craig
- 5 years ago
- Views:
Transcription
1 Probabilistic Tracking and Reconstruction of 3D Human Motion in Monocular Video Sequences Presentation of the thesis work of: Hedvig Sidenbladh, KTH Thesis opponent: Prof. Bill Freeman, MIT
2 Thesis supervisors Prof. Jan-Olof Eklundh, KTH Prof. Michael Black, Brown University Collaborators Dr. David Fleet, Xerox PARC Prof. Dirk Ormoneit, Stanford University

3 A vision of the future from the past. Elektro Sparky New York Worlds Fair, 1939 (Westinghouse Historical Collection)



4 Applications of computers Video search looking at people Human-machine interaction Robots Intelligent rooms Entertainment: motion capture for games, animation, and film. Surveillance
5 Technical Goal Tracking a human in 3D


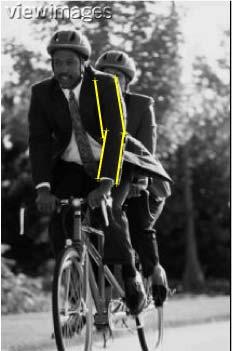
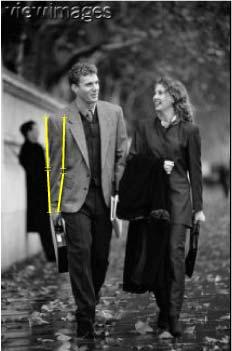
6 Why is it Hard? The appearance of people can vary dramatically.



7 Why is it hard? People can appear in arbitrary poses. Structure is unobservable inference from visible parts.
8 Why is it hard? Geometrically under-constrained.


9 One solution: Use markers Use multiple cameras
10 Bregler and Malik 98 State of the Art. Brightness constancy cue Insensitive to appearance Full-body required multiple cameras Single hypothesis
11 Artist s s models... 2D vs. 3D tracking

12 Cham and Rehg 99 State of the Art. Single camera, multiple hypotheses 2D templates (no drift but view dependent) I(x, t) = I(x+u,0) + η

13 1999 state of art Pavlovic, Rehg, Cham, and Murphy, Intl. Conf. Computer Vision, 1999

14 Deutscher,, North, Bascle,, & Blake 00 State of the Art. Multiple hypotheses Multiple cameras Simplified clothing, lighting and background

15 Note: we can fake it with clever system design M. Krueger, Artificial Reality, Addison-Wesley, 1983.
16 Game videos...

17 Black background Decathlete 100m hurdles No other people in camera Person at known distance and position. Display tells person what motion to do.
18 Performance specifications * No special clothing * Monocular, grayscale, sequences (archival data) * Unknown, cluttered, environment Task: Infer 3D human motion from 2D image
19 Bayesian formulation p(model cues) = p(cues model) p(model) p(cues) 1. Need a constraining likelihood model that is also invariant to variations in human appearance. 2. Need a prior model of how people move. 3. Posterior probability: Need an effective way to explore the model space (very high dimensional) and represent ambiguities.
20 System components Representation for probabilistic analysis. Models for human appearance (likelihood term). Models for human motion (prior term). Very general model Very specific model Example-based model
21 System components Representation for probabilistic analysis. Models for human appearance (likelihood term). Models for human motion (prior term). Very general model Very specific model Example-based model
22 Simple Body Model * Limbs are truncated cones * Parameter vector of joint angles and angular velocities = φ

23 Multiple Hypotheses Posterior distribution over model parameters often multimodal (due to ambiguities) Represent whole distribution: sampled representation each sample is a pose predict over time using a particle filtering approach
24 Particle Filter Posterior r p φ I ) ( t 1 t 1 sample Temporal dynamics p( φ t φ t 1) sample r p( φ t It) Posterior normalize p( I t φ t) Likelihood Problem: Expensive represententation of posterior! Approaches to solve problem: Lower the number of samples. (Deutsher et al., CVPR00) Represent the space in other ways (Choo and Fleet, ICCV01)
25 System components Representation for probabilistic analysis. Models for human appearance (likelihood term). Models for human motion (prior term). Very general model Very specific model Example-based model

26 Changing background What do people look like? Varying shadows Occlusion Deforming clothing What do non-people look like? Low contrast limb boundaries


27 Edge Detection? Probabilistic model? Under/over-segmentation, thresholds,
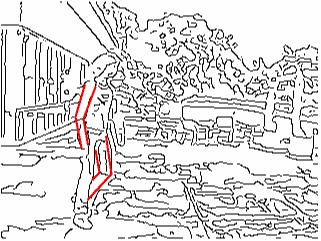
28 Key Idea #1 (Likelihood) 1. Use the 3D model to predict the location of limb boundaries (not necessarily features) in the scene. 2. Compute various filter responses steered to the predicted orientation of the limb. 3. Compute likelihood of filter responses using a statistical model learned from examples.
 = sinθ f ( x, σ ) + cosθ f ( x, σ ) x y Filter responses steered to arm")
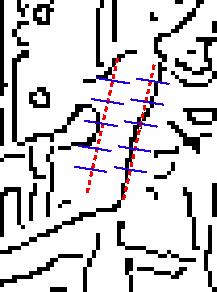
29 Edge Filters Normalized derivatives of Gaussians (Lindeberg, Granlund and Knutsson, Perona, Freeman&Adelson, ) Edge filter response steered to limb orientation: e f ( x, θ, σ ) = sinθ f ( x, σ ) + cosθ f ( x, σ ) x y Filter responses steered to arm orientation.


30 Example Training Images
31 Edge Distributions Edge response steered to model edge: f ( x, θ, σ ) = sinθ f ( x, σ ) + cosθ f ( x, σ ) e x y Similar to Konishi et al., CVPR 99

32 Edge Likelihood Ratio Edge response Likelihood ratio


33 Other Cues Ridges I(x, t) I(x+u, t+1) Motion
34 f Ridge Distributions Ridge response steered to limb orientation ( x, θ, σ ) = r sin 2 cos θ f 2 xx θ f ( x, σ ) + cos xx 2 ( x, σ ) + sin θ f 2 yy θ f ( x, σ ) 2sinθ cosθ f yy ( x, σ ) + 2sinθ cosθ f xy ( x, σ ) xy ( x, σ ) Ridge response only on certain image scales!
35 Motion distributions Different underlying motion models
36 Likelihood Formulation Independence assumptions: Cues: p(image model) = p(cue1 model) p(cue2 model) Spatial: p(image model) = Π p(image(x) model) x image Scales: p(image model) = Π p(image(σ) model) σ=1,... Combines cues and scales! Simplification, in reality there are dependencies
37 The power of cue combination


38 Edge cues Using edge cues alone



39 Ridge cues Using ridge cues alone
40 Flow cues Using flow cue alone




41 Edge cues Using edge, ridge, and motion cues together Ridge cues Flow cues
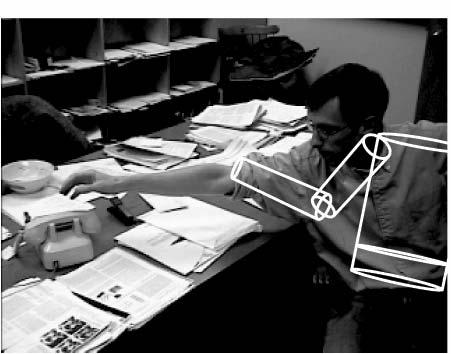
42 Key Idea #2 p(image foreground, background) p(foreground part of image foreground) p(foreground part of image background) Do not look in parts of the image considered background Foreground part of image
43 Likelihood Likelihood = pixels back pixels fore back image p fore image p back fore image p ) ( ) ( ), ( = pixels fore pixels fore pixels all back image p fore image p back image p ) ( ) ( ) ( = pixels fore pixels fore back image p fore image p const ) ( ) ( Foreground pixels Background pixels
44 System components Representation for probabilistic analysis. Models for human appearance (likelihood term). Models for human motion (prior term). Very general model Very specific model Example-based model
45 The Prior term Bayesian formulation: p(model cue) p(cue model) p(model) Need a constraining likelihood model that is also invariant to variations in human appearance Need a good model of how people move
46 Very general model Constant velocity motions Not constrained by how people tend to move.
47 Constant velocity model All DOF in the model parameter space, φ, independent Angles are assumed to change with constant speed Speed and position changes are randomly sampled from normal distribution

48 Tracking an Arm Moving camera, constant velocity model 1500 samples ~2 min/frame

49 Self Occlusion 1500 samples ~2 min/frame Constant velocity model
50 System components Representation for probabilistic analysis. Models for human appearance (likelihood term). Models for human motion (prior term). Very general model Very specific model Example-based model
51 Very specific model Only handles people walking. Very powerful constraint on human motion.
 Mean cycle Small noise Large")
52 Models of Human Dynamics Action-specific model - Walking Training data: 3D motion capture data From training set, learn mean cycle and common modes of deviation (PCA) Mean cycle Small noise Large noise

53 Walking Person #samples from to 2500 by using the learned likelihood 2500 samples ~10 min/frame Walking model
54 No likelihood * how strong is the walking prior? (or is our likelihood doing anything?)
55 System components Representation for probabilistic analysis. Models for human appearance (likelihood term). Models for human motion (prior term). Very general model Very specific model Example-based model
56 Example-based model Take lots of training data. Use snippets of the data as models for how people are likely to move.

57 Example-based model Ten samples from the prior, drawn using approximate probabilistic tree search.
58 Tracking with only 300 particles. Smooth motion prior. Example-based motion prior.
59 Lessons Learned Representation for probabilistic analysis. Probabilistic (Bayesian) framework allows Integration of information in a principled way Modeling of priors Particle filtering allows Multi-modal distributions Tracking with ambiguities and non-linear models Models for human appearance (likelihood term). Models for human motion (prior term).
60 Lessons Learned Representation for probabilistic analysis. Models for human appearance (likelihood term). Generic, learned, model of appearance Combines multiple cues Exploits work on image statistics Use the 3D model to predict features Model of foreground and background Exploits the ratio between foreground and background likelihood Improves tracking Models for human motion (prior term).
61 Lessons Learned Representation for probabilistic analysis. Models for human appearance (likelihood term). Models for human motion (prior term). Explored 3 different models; analyzed the tradeoffs between each.
62 End

63 Decathlete javelin throw





64 Edges
65 Bayesian Inference Exploit cues in the images. Learn likelihood models: p(image cue model) Build models of human form and motion. Learn priors over model parameters: p(model) Represent the posterior distribution: p(model cue) p(cue model) p(model)
Inferring 3D People from 2D Images
 Inferring 3D People from 2D Images Department of Computer Science Brown University http://www.cs.brown.edu/~black Collaborators Hedvig Sidenbladh, Swedish Defense Research Inst. Leon Sigal, Brown University
Inferring 3D People from 2D Images Department of Computer Science Brown University http://www.cs.brown.edu/~black Collaborators Hedvig Sidenbladh, Swedish Defense Research Inst. Leon Sigal, Brown University
Visual Motion Analysis and Tracking Part II
 Visual Motion Analysis and Tracking Part II David J Fleet and Allan D Jepson CIAR NCAP Summer School July 12-16, 16, 2005 Outline Optical Flow and Tracking: Optical flow estimation (robust, iterative refinement,
Visual Motion Analysis and Tracking Part II David J Fleet and Allan D Jepson CIAR NCAP Summer School July 12-16, 16, 2005 Outline Optical Flow and Tracking: Optical flow estimation (robust, iterative refinement,
Learning Image Statistics for Bayesian Tracking
 2 3 4 5 6 7 8 9 2 2 3 4 5 6 7 8 9.8.6.4.2.2.4.6.8.8.6.4.2.2.4.6.8 Learning Image Statistics for Bayesian Tracking Hedvig Sidenbladh Michael J. Black CVAP/NADA Dept. of Computer Science, Box 9 Royal Institute
2 3 4 5 6 7 8 9 2 2 3 4 5 6 7 8 9.8.6.4.2.2.4.6.8.8.6.4.2.2.4.6.8 Learning Image Statistics for Bayesian Tracking Hedvig Sidenbladh Michael J. Black CVAP/NADA Dept. of Computer Science, Box 9 Royal Institute
Edge Filter Response. Ridge Filter Response
 Learning the Statistics of People in Images and Video Hedvig Sidenbladh Λ Computational Vision and Active Perception Laboratory, Dept. of Numerical Analysis and Computer Science, KTH, SE-1 44 Stockholm,
Learning the Statistics of People in Images and Video Hedvig Sidenbladh Λ Computational Vision and Active Perception Laboratory, Dept. of Numerical Analysis and Computer Science, KTH, SE-1 44 Stockholm,
Human Upper Body Pose Estimation in Static Images
 1. Research Team Human Upper Body Pose Estimation in Static Images Project Leader: Graduate Students: Prof. Isaac Cohen, Computer Science Mun Wai Lee 2. Statement of Project Goals This goal of this project
1. Research Team Human Upper Body Pose Estimation in Static Images Project Leader: Graduate Students: Prof. Isaac Cohen, Computer Science Mun Wai Lee 2. Statement of Project Goals This goal of this project
Bayesian Reconstruction of 3D Human Motion from Single-Camera Video
 Bayesian Reconstruction of 3D Human Motion from Single-Camera Video Nicholas R. Howe Cornell University Michael E. Leventon MIT William T. Freeman Mitsubishi Electric Research Labs Problem Background 2D
Bayesian Reconstruction of 3D Human Motion from Single-Camera Video Nicholas R. Howe Cornell University Michael E. Leventon MIT William T. Freeman Mitsubishi Electric Research Labs Problem Background 2D
Stochastic Tracking of 3D Human Figures Using 2D Image Motion
 Stochastic Tracking of 3D Human Figures Using 2D Image Motion Hedvig Sidenbladh 1, Michael J. Black 2, and David J. Fleet 2 1 Royal Institute of Technology (KTH), CVAP/NADA, S 1 44 Stockholm, Sweden hedvig@nada.kth.se
Stochastic Tracking of 3D Human Figures Using 2D Image Motion Hedvig Sidenbladh 1, Michael J. Black 2, and David J. Fleet 2 1 Royal Institute of Technology (KTH), CVAP/NADA, S 1 44 Stockholm, Sweden hedvig@nada.kth.se
Visual Tracking of Human Body with Deforming Motion and Shape Average
 Visual Tracking of Human Body with Deforming Motion and Shape Average Alessandro Bissacco UCLA Computer Science Los Angeles, CA 90095 bissacco@cs.ucla.edu UCLA CSD-TR # 020046 Abstract In this work we
Visual Tracking of Human Body with Deforming Motion and Shape Average Alessandro Bissacco UCLA Computer Science Los Angeles, CA 90095 bissacco@cs.ucla.edu UCLA CSD-TR # 020046 Abstract In this work we
radius length global trans global rot
 Stochastic Tracking of 3D Human Figures Using 2D Image Motion Hedvig Sidenbladh 1 Michael J. Black 2 David J. Fleet 2 1 Royal Institute of Technology (KTH), CVAP/NADA, S 1 44 Stockholm, Sweden hedvig@nada.kth.se
Stochastic Tracking of 3D Human Figures Using 2D Image Motion Hedvig Sidenbladh 1 Michael J. Black 2 David J. Fleet 2 1 Royal Institute of Technology (KTH), CVAP/NADA, S 1 44 Stockholm, Sweden hedvig@nada.kth.se
Predicting 3D People from 2D Pictures
 Predicting 3D People from 2D Pictures Leonid Sigal Michael J. Black Department of Computer Science Brown University http://www.cs.brown.edu/people/ls/ CIAR Summer School August 15-20, 2006 Leonid Sigal
Predicting 3D People from 2D Pictures Leonid Sigal Michael J. Black Department of Computer Science Brown University http://www.cs.brown.edu/people/ls/ CIAR Summer School August 15-20, 2006 Leonid Sigal
3D Human Motion Analysis and Manifolds
 D E P A R T M E N T O F C O M P U T E R S C I E N C E U N I V E R S I T Y O F C O P E N H A G E N 3D Human Motion Analysis and Manifolds Kim Steenstrup Pedersen DIKU Image group and E-Science center Motivation
D E P A R T M E N T O F C O M P U T E R S C I E N C E U N I V E R S I T Y O F C O P E N H A G E N 3D Human Motion Analysis and Manifolds Kim Steenstrup Pedersen DIKU Image group and E-Science center Motivation
International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Vol. XXXIV-5/W10
 BUNDLE ADJUSTMENT FOR MARKERLESS BODY TRACKING IN MONOCULAR VIDEO SEQUENCES Ali Shahrokni, Vincent Lepetit, Pascal Fua Computer Vision Lab, Swiss Federal Institute of Technology (EPFL) ali.shahrokni,vincent.lepetit,pascal.fua@epfl.ch
BUNDLE ADJUSTMENT FOR MARKERLESS BODY TRACKING IN MONOCULAR VIDEO SEQUENCES Ali Shahrokni, Vincent Lepetit, Pascal Fua Computer Vision Lab, Swiss Federal Institute of Technology (EPFL) ali.shahrokni,vincent.lepetit,pascal.fua@epfl.ch
Feature Tracking and Optical Flow
 Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who in turn adapted slides from Steve Seitz, Rick Szeliski,
Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who in turn adapted slides from Steve Seitz, Rick Szeliski,
An Adaptive Appearance Model Approach for Model-based Articulated Object Tracking
 An Adaptive Appearance Model Approach for Model-based Articulated Object Tracking Alexandru O. Bălan Michael J. Black Department of Computer Science - Brown University Providence, RI 02912, USA {alb, black}@cs.brown.edu
An Adaptive Appearance Model Approach for Model-based Articulated Object Tracking Alexandru O. Bălan Michael J. Black Department of Computer Science - Brown University Providence, RI 02912, USA {alb, black}@cs.brown.edu
Automatic Model Initialization for 3-D Monocular Visual Tracking of Human Limbs in Unconstrained Environments
 Automatic Model Initialization for 3-D Monocular Visual Tracking of Human Limbs in Unconstrained Environments DAVID BULLOCK & JOHN ZELEK School of Engineering University of Guelph Guelph, ON, N1G 2W1 CANADA
Automatic Model Initialization for 3-D Monocular Visual Tracking of Human Limbs in Unconstrained Environments DAVID BULLOCK & JOHN ZELEK School of Engineering University of Guelph Guelph, ON, N1G 2W1 CANADA
Inferring 3D from 2D
 Inferring 3D from 2D History Monocular vs. multi-view analysis Difficulties structure of the solution and ambiguities static and dynamic ambiguities Modeling frameworks for inference and learning top-down
Inferring 3D from 2D History Monocular vs. multi-view analysis Difficulties structure of the solution and ambiguities static and dynamic ambiguities Modeling frameworks for inference and learning top-down
Feature Tracking and Optical Flow
 Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who 1 in turn adapted slides from Steve Seitz, Rick Szeliski,
Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who 1 in turn adapted slides from Steve Seitz, Rick Szeliski,
Robust Model-Free Tracking of Non-Rigid Shape. Abstract
 Robust Model-Free Tracking of Non-Rigid Shape Lorenzo Torresani Stanford University ltorresa@cs.stanford.edu Christoph Bregler New York University chris.bregler@nyu.edu New York University CS TR2003-840
Robust Model-Free Tracking of Non-Rigid Shape Lorenzo Torresani Stanford University ltorresa@cs.stanford.edu Christoph Bregler New York University chris.bregler@nyu.edu New York University CS TR2003-840
3D Spatial Layout Propagation in a Video Sequence
 3D Spatial Layout Propagation in a Video Sequence Alejandro Rituerto 1, Roberto Manduchi 2, Ana C. Murillo 1 and J. J. Guerrero 1 arituerto@unizar.es, manduchi@soe.ucsc.edu, acm@unizar.es, and josechu.guerrero@unizar.es
3D Spatial Layout Propagation in a Video Sequence Alejandro Rituerto 1, Roberto Manduchi 2, Ana C. Murillo 1 and J. J. Guerrero 1 arituerto@unizar.es, manduchi@soe.ucsc.edu, acm@unizar.es, and josechu.guerrero@unizar.es
The SIFT (Scale Invariant Feature
 The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
Behaviour based particle filtering for human articulated motion tracking
 Loughborough University Institutional Repository Behaviour based particle filtering for human articulated motion tracking This item was submitted to Loughborough University's Institutional Repository by
Loughborough University Institutional Repository Behaviour based particle filtering for human articulated motion tracking This item was submitted to Loughborough University's Institutional Repository by
Autonomous Mobile Robot Design
 Autonomous Mobile Robot Design Topic: EKF-based SLAM Dr. Kostas Alexis (CSE) These slides have partially relied on the course of C. Stachniss, Robot Mapping - WS 2013/14 Autonomous Robot Challenges Where
Autonomous Mobile Robot Design Topic: EKF-based SLAM Dr. Kostas Alexis (CSE) These slides have partially relied on the course of C. Stachniss, Robot Mapping - WS 2013/14 Autonomous Robot Challenges Where
Automatic Tracking of Moving Objects in Video for Surveillance Applications
 Automatic Tracking of Moving Objects in Video for Surveillance Applications Manjunath Narayana Committee: Dr. Donna Haverkamp (Chair) Dr. Arvin Agah Dr. James Miller Department of Electrical Engineering
Automatic Tracking of Moving Objects in Video for Surveillance Applications Manjunath Narayana Committee: Dr. Donna Haverkamp (Chair) Dr. Arvin Agah Dr. James Miller Department of Electrical Engineering
Applying Synthetic Images to Learning Grasping Orientation from Single Monocular Images
 Applying Synthetic Images to Learning Grasping Orientation from Single Monocular Images 1 Introduction - Steve Chuang and Eric Shan - Determining object orientation in images is a well-established topic
Applying Synthetic Images to Learning Grasping Orientation from Single Monocular Images 1 Introduction - Steve Chuang and Eric Shan - Determining object orientation in images is a well-established topic
Probabilistic Detection and Tracking of Motion Boundaries
 International Journal of Computer Vision 38(3), 231 245, 2000 c 2000 Kluwer Academic Publishers. Manufactured in The Netherlands. Probabilistic Detection and Tracking of Motion Boundaries MICHAEL J. BLACK
International Journal of Computer Vision 38(3), 231 245, 2000 c 2000 Kluwer Academic Publishers. Manufactured in The Netherlands. Probabilistic Detection and Tracking of Motion Boundaries MICHAEL J. BLACK
9.913 Pattern Recognition for Vision. Class I - Overview. Instructors: B. Heisele, Y. Ivanov, T. Poggio
 9.913 Class I - Overview Instructors: B. Heisele, Y. Ivanov, T. Poggio TOC Administrivia Problems of Computer Vision and Pattern Recognition Overview of classes Quick review of Matlab Administrivia Instructors:
9.913 Class I - Overview Instructors: B. Heisele, Y. Ivanov, T. Poggio TOC Administrivia Problems of Computer Vision and Pattern Recognition Overview of classes Quick review of Matlab Administrivia Instructors:
Probabilistic Detection and Tracking of Motion Discontinuities
 Probabilistic Detection and Tracking of Motion Discontinuities Michael J. Black David J. Fleet Xerox Palo Alto Research Center 3333 Coyote Hill Road Palo Alto, CA 94304 black,fleet @parc.xerox.com http://www.parc.xerox.com/
Probabilistic Detection and Tracking of Motion Discontinuities Michael J. Black David J. Fleet Xerox Palo Alto Research Center 3333 Coyote Hill Road Palo Alto, CA 94304 black,fleet @parc.xerox.com http://www.parc.xerox.com/
Switching Hypothesized Measurements: A Dynamic Model with Applications to Occlusion Adaptive Joint Tracking
 Switching Hypothesized Measurements: A Dynamic Model with Applications to Occlusion Adaptive Joint Tracking Yang Wang Tele Tan Institute for Infocomm Research, Singapore {ywang, telctan}@i2r.a-star.edu.sg
Switching Hypothesized Measurements: A Dynamic Model with Applications to Occlusion Adaptive Joint Tracking Yang Wang Tele Tan Institute for Infocomm Research, Singapore {ywang, telctan}@i2r.a-star.edu.sg
Revising Stereo Vision Maps in Particle Filter Based SLAM using Localisation Confidence and Sample History
 Revising Stereo Vision Maps in Particle Filter Based SLAM using Localisation Confidence and Sample History Simon Thompson and Satoshi Kagami Digital Human Research Center National Institute of Advanced
Revising Stereo Vision Maps in Particle Filter Based SLAM using Localisation Confidence and Sample History Simon Thompson and Satoshi Kagami Digital Human Research Center National Institute of Advanced
Evaluation of Moving Object Tracking Techniques for Video Surveillance Applications
 International Journal of Current Engineering and Technology E-ISSN 2277 4106, P-ISSN 2347 5161 2015INPRESSCO, All Rights Reserved Available at http://inpressco.com/category/ijcet Research Article Evaluation
International Journal of Current Engineering and Technology E-ISSN 2277 4106, P-ISSN 2347 5161 2015INPRESSCO, All Rights Reserved Available at http://inpressco.com/category/ijcet Research Article Evaluation
Motion and Tracking. Andrea Torsello DAIS Università Ca Foscari via Torino 155, Mestre (VE)
") Motion and Tracking Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Motion Segmentation Segment the video into multiple coherently moving objects Motion and Perceptual Organization
Motion and Tracking Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Motion Segmentation Segment the video into multiple coherently moving objects Motion and Perceptual Organization
HUMAN COMPUTER INTERFACE BASED ON HAND TRACKING
 Proceedings of MUSME 2011, the International Symposium on Multibody Systems and Mechatronics Valencia, Spain, 25-28 October 2011 HUMAN COMPUTER INTERFACE BASED ON HAND TRACKING Pedro Achanccaray, Cristian
Proceedings of MUSME 2011, the International Symposium on Multibody Systems and Mechatronics Valencia, Spain, 25-28 October 2011 HUMAN COMPUTER INTERFACE BASED ON HAND TRACKING Pedro Achanccaray, Cristian
Finally: Motion and tracking. Motion 4/20/2011. CS 376 Lecture 24 Motion 1. Video. Uses of motion. Motion parallax. Motion field
 Finally: Motion and tracking Tracking objects, video analysis, low level motion Motion Wed, April 20 Kristen Grauman UT-Austin Many slides adapted from S. Seitz, R. Szeliski, M. Pollefeys, and S. Lazebnik
Finally: Motion and tracking Tracking objects, video analysis, low level motion Motion Wed, April 20 Kristen Grauman UT-Austin Many slides adapted from S. Seitz, R. Szeliski, M. Pollefeys, and S. Lazebnik
This chapter explains two techniques which are frequently used throughout
 Chapter 2 Basic Techniques This chapter explains two techniques which are frequently used throughout this thesis. First, we will introduce the concept of particle filters. A particle filter is a recursive
Chapter 2 Basic Techniques This chapter explains two techniques which are frequently used throughout this thesis. First, we will introduce the concept of particle filters. A particle filter is a recursive
Problems with template matching
 Problems with template matching The template represents the object as we expect to find it in the image The object can indeed be scaled or rotated This technique requires a separate template for each scale
Problems with template matching The template represents the object as we expect to find it in the image The object can indeed be scaled or rotated This technique requires a separate template for each scale
Part I: HumanEva-I dataset and evaluation metrics
 Part I: HumanEva-I dataset and evaluation metrics Leonid Sigal Michael J. Black Department of Computer Science Brown University http://www.cs.brown.edu/people/ls/ http://vision.cs.brown.edu/humaneva/ Motivation
Part I: HumanEva-I dataset and evaluation metrics Leonid Sigal Michael J. Black Department of Computer Science Brown University http://www.cs.brown.edu/people/ls/ http://vision.cs.brown.edu/humaneva/ Motivation
The Kinect Sensor. Luís Carriço FCUL 2014/15
 Advanced Interaction Techniques The Kinect Sensor Luís Carriço FCUL 2014/15 Sources: MS Kinect for Xbox 360 John C. Tang. Using Kinect to explore NUI, Ms Research, From Stanford CS247 Shotton et al. Real-Time
Advanced Interaction Techniques The Kinect Sensor Luís Carriço FCUL 2014/15 Sources: MS Kinect for Xbox 360 John C. Tang. Using Kinect to explore NUI, Ms Research, From Stanford CS247 Shotton et al. Real-Time
Human Detection. A state-of-the-art survey. Mohammad Dorgham. University of Hamburg
 Human Detection A state-of-the-art survey Mohammad Dorgham University of Hamburg Presentation outline Motivation Applications Overview of approaches (categorized) Approaches details References Motivation
Human Detection A state-of-the-art survey Mohammad Dorgham University of Hamburg Presentation outline Motivation Applications Overview of approaches (categorized) Approaches details References Motivation
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
EE 264: Image Processing and Reconstruction. Image Motion Estimation I. EE 264: Image Processing and Reconstruction. Outline
 1 Image Motion Estimation I 2 Outline 1. Introduction to Motion 2. Why Estimate Motion? 3. Global vs. Local Motion 4. Block Motion Estimation 5. Optical Flow Estimation Basics 6. Optical Flow Estimation
1 Image Motion Estimation I 2 Outline 1. Introduction to Motion 2. Why Estimate Motion? 3. Global vs. Local Motion 4. Block Motion Estimation 5. Optical Flow Estimation Basics 6. Optical Flow Estimation
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS
 SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
People Tracking and Segmentation Using Efficient Shape Sequences Matching
 People Tracking and Segmentation Using Efficient Shape Sequences Matching Junqiu Wang, Yasushi Yagi, and Yasushi Makihara The Institute of Scientific and Industrial Research, Osaka University 8-1 Mihogaoka,
People Tracking and Segmentation Using Efficient Shape Sequences Matching Junqiu Wang, Yasushi Yagi, and Yasushi Makihara The Institute of Scientific and Industrial Research, Osaka University 8-1 Mihogaoka,
Building a Panorama. Matching features. Matching with Features. How do we build a panorama? Computational Photography, 6.882
 Matching features Building a Panorama Computational Photography, 6.88 Prof. Bill Freeman April 11, 006 Image and shape descriptors: Harris corner detectors and SIFT features. Suggested readings: Mikolajczyk
Matching features Building a Panorama Computational Photography, 6.88 Prof. Bill Freeman April 11, 006 Image and shape descriptors: Harris corner detectors and SIFT features. Suggested readings: Mikolajczyk
Tracking as Repeated Figure/Ground Segmentation
 Tracking as Repeated Figure/Ground Segmentation Xiaofeng Ren Toyota Technological Institute at Chicago 1427 E. 60th Street, Chicago, IL 60637 xren@tti-c.org Jitendra Malik Computer Science Division University
Tracking as Repeated Figure/Ground Segmentation Xiaofeng Ren Toyota Technological Institute at Chicago 1427 E. 60th Street, Chicago, IL 60637 xren@tti-c.org Jitendra Malik Computer Science Division University
Scene Grammars, Factor Graphs, and Belief Propagation
 Scene Grammars, Factor Graphs, and Belief Propagation Pedro Felzenszwalb Brown University Joint work with Jeroen Chua Probabilistic Scene Grammars General purpose framework for image understanding and
Scene Grammars, Factor Graphs, and Belief Propagation Pedro Felzenszwalb Brown University Joint work with Jeroen Chua Probabilistic Scene Grammars General purpose framework for image understanding and
Scene Grammars, Factor Graphs, and Belief Propagation
 Scene Grammars, Factor Graphs, and Belief Propagation Pedro Felzenszwalb Brown University Joint work with Jeroen Chua Probabilistic Scene Grammars General purpose framework for image understanding and
Scene Grammars, Factor Graphs, and Belief Propagation Pedro Felzenszwalb Brown University Joint work with Jeroen Chua Probabilistic Scene Grammars General purpose framework for image understanding and
Simultaneous Appearance Modeling and Segmentation for Matching People under Occlusion
 Simultaneous Appearance Modeling and Segmentation for Matching People under Occlusion Zhe Lin, Larry S. Davis, David Doermann, and Daniel DeMenthon Institute for Advanced Computer Studies University of
Simultaneous Appearance Modeling and Segmentation for Matching People under Occlusion Zhe Lin, Larry S. Davis, David Doermann, and Daniel DeMenthon Institute for Advanced Computer Studies University of
Lecture 16: Computer Vision
 CS4442/9542b: Artificial Intelligence II Prof. Olga Veksler Lecture 16: Computer Vision Motion Slides are from Steve Seitz (UW), David Jacobs (UMD) Outline Motion Estimation Motion Field Optical Flow Field
CS4442/9542b: Artificial Intelligence II Prof. Olga Veksler Lecture 16: Computer Vision Motion Slides are from Steve Seitz (UW), David Jacobs (UMD) Outline Motion Estimation Motion Field Optical Flow Field
Estimation of Human Figure Motion Using Robust Tracking of Articulated Layers
 Estimation of Human Figure Motion Using Robust Tracking of Articulated Layers Kooksang Moon and Vladimir Pavlović Department of Computer Science Rutgers University Piscataway, NJ 08854 Abstract We propose
Estimation of Human Figure Motion Using Robust Tracking of Articulated Layers Kooksang Moon and Vladimir Pavlović Department of Computer Science Rutgers University Piscataway, NJ 08854 Abstract We propose
Object Recognition Using Pictorial Structures. Daniel Huttenlocher Computer Science Department. In This Talk. Object recognition in computer vision
 Object Recognition Using Pictorial Structures Daniel Huttenlocher Computer Science Department Joint work with Pedro Felzenszwalb, MIT AI Lab In This Talk Object recognition in computer vision Brief definition
Object Recognition Using Pictorial Structures Daniel Huttenlocher Computer Science Department Joint work with Pedro Felzenszwalb, MIT AI Lab In This Talk Object recognition in computer vision Brief definition
Peripheral drift illusion
 Peripheral drift illusion Does it work on other animals? Computer Vision Motion and Optical Flow Many slides adapted from J. Hays, S. Seitz, R. Szeliski, M. Pollefeys, K. Grauman and others Video A video
Peripheral drift illusion Does it work on other animals? Computer Vision Motion and Optical Flow Many slides adapted from J. Hays, S. Seitz, R. Szeliski, M. Pollefeys, K. Grauman and others Video A video
Last update: May 4, Vision. CMSC 421: Chapter 24. CMSC 421: Chapter 24 1
 Last update: May 4, 200 Vision CMSC 42: Chapter 24 CMSC 42: Chapter 24 Outline Perception generally Image formation Early vision 2D D Object recognition CMSC 42: Chapter 24 2 Perception generally Stimulus
Last update: May 4, 200 Vision CMSC 42: Chapter 24 CMSC 42: Chapter 24 Outline Perception generally Image formation Early vision 2D D Object recognition CMSC 42: Chapter 24 2 Perception generally Stimulus
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 11 140311 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Motion Analysis Motivation Differential Motion Optical
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 11 140311 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Motion Analysis Motivation Differential Motion Optical
Automatic Detection and Tracking of Human Motion with a View-Based Representation
 Automatic Detection and Tracking of Human Motion with a View-Based Representation Ronan Fablet and Michael J. Black Department of Computer Science Brown University, Box 19 Providence, RI02912, USA {rfablet,black}@cs.brown.edu
Automatic Detection and Tracking of Human Motion with a View-Based Representation Ronan Fablet and Michael J. Black Department of Computer Science Brown University, Box 19 Providence, RI02912, USA {rfablet,black}@cs.brown.edu
Human Activity Recognition Using Multidimensional Indexing
 Human Activity Recognition Using Multidimensional Indexing By J. Ben-Arie, Z. Wang, P. Pandit, S. Rajaram, IEEE PAMI August 2002 H. Ertan Cetingul, 07/20/2006 Abstract Human activity recognition from a
Human Activity Recognition Using Multidimensional Indexing By J. Ben-Arie, Z. Wang, P. Pandit, S. Rajaram, IEEE PAMI August 2002 H. Ertan Cetingul, 07/20/2006 Abstract Human activity recognition from a
Learning Switching Linear Models of Human Motion
 To appear in Neural Information Processing Systems 13, MIT Press, Cambridge, MA Learning Switching Linear Models of Human Motion Vladimir Pavlović and James M. Rehg Compaq - Cambridge Research Lab Cambridge,
To appear in Neural Information Processing Systems 13, MIT Press, Cambridge, MA Learning Switching Linear Models of Human Motion Vladimir Pavlović and James M. Rehg Compaq - Cambridge Research Lab Cambridge,
Lecture 16: Object recognition: Part-based generative models
 Lecture 16: Object recognition: Part-based generative models Professor Stanford Vision Lab 1 What we will learn today? Introduction Constellation model Weakly supervised training One-shot learning (Problem
Lecture 16: Object recognition: Part-based generative models Professor Stanford Vision Lab 1 What we will learn today? Introduction Constellation model Weakly supervised training One-shot learning (Problem
Continuous and Discrete Optimization Methods in Computer Vision. Daniel Cremers Department of Computer Science University of Bonn
 Continuous and Discrete Optimization Methods in Computer Vision Daniel Cremers Department of Computer Science University of Bonn Oxford, August 16 2007 Segmentation by Energy Minimization Given an image,
Continuous and Discrete Optimization Methods in Computer Vision Daniel Cremers Department of Computer Science University of Bonn Oxford, August 16 2007 Segmentation by Energy Minimization Given an image,
Learning Articulated Skeletons From Motion
 Learning Articulated Skeletons From Motion Danny Tarlow University of Toronto, Machine Learning with David Ross and Richard Zemel (and Brendan Frey) August 6, 2007 Point Light Displays It's easy for humans
Learning Articulated Skeletons From Motion Danny Tarlow University of Toronto, Machine Learning with David Ross and Richard Zemel (and Brendan Frey) August 6, 2007 Point Light Displays It's easy for humans
Supervised texture detection in images
 Supervised texture detection in images Branislav Mičušík and Allan Hanbury Pattern Recognition and Image Processing Group, Institute of Computer Aided Automation, Vienna University of Technology Favoritenstraße
Supervised texture detection in images Branislav Mičušík and Allan Hanbury Pattern Recognition and Image Processing Group, Institute of Computer Aided Automation, Vienna University of Technology Favoritenstraße
Experiments with Edge Detection using One-dimensional Surface Fitting
 Experiments with Edge Detection using One-dimensional Surface Fitting Gabor Terei, Jorge Luis Nunes e Silva Brito The Ohio State University, Department of Geodetic Science and Surveying 1958 Neil Avenue,
Experiments with Edge Detection using One-dimensional Surface Fitting Gabor Terei, Jorge Luis Nunes e Silva Brito The Ohio State University, Department of Geodetic Science and Surveying 1958 Neil Avenue,
Adaptive Background Mixture Models for Real-Time Tracking
 Adaptive Background Mixture Models for Real-Time Tracking Chris Stauffer and W.E.L Grimson CVPR 1998 Brendan Morris http://www.ee.unlv.edu/~b1morris/ecg782/ 2 Motivation Video monitoring and surveillance
Adaptive Background Mixture Models for Real-Time Tracking Chris Stauffer and W.E.L Grimson CVPR 1998 Brendan Morris http://www.ee.unlv.edu/~b1morris/ecg782/ 2 Motivation Video monitoring and surveillance
Lecture 20: Tracking. Tuesday, Nov 27
 Lecture 20: Tracking Tuesday, Nov 27 Paper reviews Thorough summary in your own words Main contribution Strengths? Weaknesses? How convincing are the experiments? Suggestions to improve them? Extensions?
Lecture 20: Tracking Tuesday, Nov 27 Paper reviews Thorough summary in your own words Main contribution Strengths? Weaknesses? How convincing are the experiments? Suggestions to improve them? Extensions?
08 An Introduction to Dense Continuous Robotic Mapping
 NAVARCH/EECS 568, ROB 530 - Winter 2018 08 An Introduction to Dense Continuous Robotic Mapping Maani Ghaffari March 14, 2018 Previously: Occupancy Grid Maps Pose SLAM graph and its associated dense occupancy
NAVARCH/EECS 568, ROB 530 - Winter 2018 08 An Introduction to Dense Continuous Robotic Mapping Maani Ghaffari March 14, 2018 Previously: Occupancy Grid Maps Pose SLAM graph and its associated dense occupancy
Tracking. Establish where an object is, other aspects of state, using time sequence Biggest problem -- Data Association
 Tracking Establish where an object is, other aspects of state, using time sequence Biggest problem -- Data Association Key ideas Tracking by detection Tracking through flow Track by detection (simple form)
Tracking Establish where an object is, other aspects of state, using time sequence Biggest problem -- Data Association Key ideas Tracking by detection Tracking through flow Track by detection (simple form)
Articulated Body Motion Capture by Annealed Particle Filtering
 Articulated Body Motion Capture by Annealed Particle Filtering Jonathan Deutscher University of Oxford Dept. of Engineering Science Oxford, O13PJ United Kingdom jdeutsch@robots.ox.ac.uk Andrew Blake Microsoft
Articulated Body Motion Capture by Annealed Particle Filtering Jonathan Deutscher University of Oxford Dept. of Engineering Science Oxford, O13PJ United Kingdom jdeutsch@robots.ox.ac.uk Andrew Blake Microsoft
Object Tracking with an Adaptive Color-Based Particle Filter
 Object Tracking with an Adaptive Color-Based Particle Filter Katja Nummiaro 1, Esther Koller-Meier 2, and Luc Van Gool 1,2 1 Katholieke Universiteit Leuven, ESAT/VISICS, Belgium {knummiar,vangool}@esat.kuleuven.ac.be
Object Tracking with an Adaptive Color-Based Particle Filter Katja Nummiaro 1, Esther Koller-Meier 2, and Luc Van Gool 1,2 1 Katholieke Universiteit Leuven, ESAT/VISICS, Belgium {knummiar,vangool}@esat.kuleuven.ac.be
Detecting Salient Contours Using Orientation Energy Distribution. Part I: Thresholding Based on. Response Distribution
 Detecting Salient Contours Using Orientation Energy Distribution The Problem: How Does the Visual System Detect Salient Contours? CPSC 636 Slide12, Spring 212 Yoonsuck Choe Co-work with S. Sarma and H.-C.
Detecting Salient Contours Using Orientation Energy Distribution The Problem: How Does the Visual System Detect Salient Contours? CPSC 636 Slide12, Spring 212 Yoonsuck Choe Co-work with S. Sarma and H.-C.
Illumination-Robust Face Recognition based on Gabor Feature Face Intrinsic Identity PCA Model
 Illumination-Robust Face Recognition based on Gabor Feature Face Intrinsic Identity PCA Model TAE IN SEOL*, SUN-TAE CHUNG*, SUNHO KI**, SEONGWON CHO**, YUN-KWANG HONG*** *School of Electronic Engineering
Illumination-Robust Face Recognition based on Gabor Feature Face Intrinsic Identity PCA Model TAE IN SEOL*, SUN-TAE CHUNG*, SUNHO KI**, SEONGWON CHO**, YUN-KWANG HONG*** *School of Electronic Engineering
Lecture 16: Computer Vision
 CS442/542b: Artificial ntelligence Prof. Olga Veksler Lecture 16: Computer Vision Motion Slides are from Steve Seitz (UW), David Jacobs (UMD) Outline Motion Estimation Motion Field Optical Flow Field Methods
CS442/542b: Artificial ntelligence Prof. Olga Veksler Lecture 16: Computer Vision Motion Slides are from Steve Seitz (UW), David Jacobs (UMD) Outline Motion Estimation Motion Field Optical Flow Field Methods
Particle Filtering. CS6240 Multimedia Analysis. Leow Wee Kheng. Department of Computer Science School of Computing National University of Singapore
 Particle Filtering CS6240 Multimedia Analysis Leow Wee Kheng Department of Computer Science School of Computing National University of Singapore (CS6240) Particle Filtering 1 / 28 Introduction Introduction
Particle Filtering CS6240 Multimedia Analysis Leow Wee Kheng Department of Computer Science School of Computing National University of Singapore (CS6240) Particle Filtering 1 / 28 Introduction Introduction
What have we leaned so far?
 What have we leaned so far? Camera structure Eye structure Project 1: High Dynamic Range Imaging What have we learned so far? Image Filtering Image Warping Camera Projection Model Project 2: Panoramic
What have we leaned so far? Camera structure Eye structure Project 1: High Dynamic Range Imaging What have we learned so far? Image Filtering Image Warping Camera Projection Model Project 2: Panoramic
Object Recognition with Invariant Features
 Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
Feature Based Registration - Image Alignment
 Feature Based Registration - Image Alignment Image Registration Image registration is the process of estimating an optimal transformation between two or more images. Many slides from Alexei Efros http://graphics.cs.cmu.edu/courses/15-463/2007_fall/463.html
Feature Based Registration - Image Alignment Image Registration Image registration is the process of estimating an optimal transformation between two or more images. Many slides from Alexei Efros http://graphics.cs.cmu.edu/courses/15-463/2007_fall/463.html
Motion Estimation (II) Ce Liu Microsoft Research New England
 Ce Liu Microsoft Research New England") Motion Estimation (II) Ce Liu celiu@microsoft.com Microsoft Research New England Last time Motion perception Motion representation Parametric motion: Lucas-Kanade T I x du dv = I x I T x I y I x T I y
Motion Estimation (II) Ce Liu celiu@microsoft.com Microsoft Research New England Last time Motion perception Motion representation Parametric motion: Lucas-Kanade T I x du dv = I x I T x I y I x T I y
Stereo Wrap + Motion. Computer Vision I. CSE252A Lecture 17
 Stereo Wrap + Motion CSE252A Lecture 17 Some Issues Ambiguity Window size Window shape Lighting Half occluded regions Problem of Occlusion Stereo Constraints CONSTRAINT BRIEF DESCRIPTION 1-D Epipolar Search
Stereo Wrap + Motion CSE252A Lecture 17 Some Issues Ambiguity Window size Window shape Lighting Half occluded regions Problem of Occlusion Stereo Constraints CONSTRAINT BRIEF DESCRIPTION 1-D Epipolar Search
TEXTURE OVERLAY ONTO NON-RIGID SURFACE USING COMMODITY DEPTH CAMERA
 TEXTURE OVERLAY ONTO NON-RIGID SURFACE USING COMMODITY DEPTH CAMERA Tomoki Hayashi 1, Francois de Sorbier 1 and Hideo Saito 1 1 Graduate School of Science and Technology, Keio University, 3-14-1 Hiyoshi,
TEXTURE OVERLAY ONTO NON-RIGID SURFACE USING COMMODITY DEPTH CAMERA Tomoki Hayashi 1, Francois de Sorbier 1 and Hideo Saito 1 1 Graduate School of Science and Technology, Keio University, 3-14-1 Hiyoshi,
Motion and Optical Flow. Slides from Ce Liu, Steve Seitz, Larry Zitnick, Ali Farhadi
 Motion and Optical Flow Slides from Ce Liu, Steve Seitz, Larry Zitnick, Ali Farhadi We live in a moving world Perceiving, understanding and predicting motion is an important part of our daily lives Motion
Motion and Optical Flow Slides from Ce Liu, Steve Seitz, Larry Zitnick, Ali Farhadi We live in a moving world Perceiving, understanding and predicting motion is an important part of our daily lives Motion
Hand Gesture Recognition Based On The Parallel Edge Finger Feature And Angular Projection
 Hand Gesture Recognition Based On The Parallel Edge Finger Feature And Angular Projection Zhou Yimin 1,2, Jiang Guolai 1, Xu Guoqing 1 and Lin Yaorong 3 1 Shenzhen Institutes of Advanced Technology, Chinese
Hand Gesture Recognition Based On The Parallel Edge Finger Feature And Angular Projection Zhou Yimin 1,2, Jiang Guolai 1, Xu Guoqing 1 and Lin Yaorong 3 1 Shenzhen Institutes of Advanced Technology, Chinese
Combining Multiple Tracking Modalities for Vehicle Tracking in Traffic Intersections
 Combining Multiple Tracking Modalities for Vehicle Tracking in Traffic Intersections Harini Veeraraghavan Nikolaos Papanikolopoulos Artificial Intelligence, Vision and Robotics Lab Department of Computer
Combining Multiple Tracking Modalities for Vehicle Tracking in Traffic Intersections Harini Veeraraghavan Nikolaos Papanikolopoulos Artificial Intelligence, Vision and Robotics Lab Department of Computer
A 3D Pattern for Post Estimation for Object Capture
 A 3D Pattern for Post Estimation for Object Capture Lei Wang, Cindy Grimm, and Robert Pless Department of Computer Science and Engineering Washington University One Brookings Drive, St. Louis, MO, 63130
A 3D Pattern for Post Estimation for Object Capture Lei Wang, Cindy Grimm, and Robert Pless Department of Computer Science and Engineering Washington University One Brookings Drive, St. Louis, MO, 63130
Monocular Human Motion Capture with a Mixture of Regressors. Ankur Agarwal and Bill Triggs GRAVIR-INRIA-CNRS, Grenoble, France
 Monocular Human Motion Capture with a Mixture of Regressors Ankur Agarwal and Bill Triggs GRAVIR-INRIA-CNRS, Grenoble, France IEEE Workshop on Vision for Human-Computer Interaction, 21 June 2005 Visual
Monocular Human Motion Capture with a Mixture of Regressors Ankur Agarwal and Bill Triggs GRAVIR-INRIA-CNRS, Grenoble, France IEEE Workshop on Vision for Human-Computer Interaction, 21 June 2005 Visual
Reconstruction of 3-D Figure Motion from 2-D Correspondences
 Appears in Computer Vision and Pattern Recognition (CVPR 01), Kauai, Hawaii, November, 2001. Reconstruction of 3-D Figure Motion from 2-D Correspondences David E. DiFranco Dept. of EECS MIT Cambridge,
Appears in Computer Vision and Pattern Recognition (CVPR 01), Kauai, Hawaii, November, 2001. Reconstruction of 3-D Figure Motion from 2-D Correspondences David E. DiFranco Dept. of EECS MIT Cambridge,
Finding 2D Shapes and the Hough Transform
 CS 4495 Computer Vision Finding 2D Shapes and the Aaron Bobick School of Interactive Computing Administrivia Today: Modeling Lines and Finding them CS4495: Problem set 1 is still posted. Please read the
CS 4495 Computer Vision Finding 2D Shapes and the Aaron Bobick School of Interactive Computing Administrivia Today: Modeling Lines and Finding them CS4495: Problem set 1 is still posted. Please read the
People Detection and Tracking with World-Z Map from a Single Stereo Camera
 Author manuscript, published in "Dans The Eighth International Workshop on Visual Surveillance - VS2008 (2008)" People Detection and Tracking with World-Z Map from a Single Stereo Camera Sofiane Yous Trinity
Author manuscript, published in "Dans The Eighth International Workshop on Visual Surveillance - VS2008 (2008)" People Detection and Tracking with World-Z Map from a Single Stereo Camera Sofiane Yous Trinity
Dynamic Shape Tracking via Region Matching
 Dynamic Shape Tracking via Region Matching Ganesh Sundaramoorthi Asst. Professor of EE and AMCS KAUST (Joint work with Yanchao Yang) The Problem: Shape Tracking Given: exact object segmentation in frame1
Dynamic Shape Tracking via Region Matching Ganesh Sundaramoorthi Asst. Professor of EE and AMCS KAUST (Joint work with Yanchao Yang) The Problem: Shape Tracking Given: exact object segmentation in frame1
Recognition Rate. 90 S 90 W 90 R Segment Length T
 Human Action Recognition By Sequence of Movelet Codewords Xiaolin Feng y Pietro Perona yz y California Institute of Technology, 36-93, Pasadena, CA 925, USA z Universit a dipadova, Italy fxlfeng,peronag@vision.caltech.edu
Human Action Recognition By Sequence of Movelet Codewords Xiaolin Feng y Pietro Perona yz y California Institute of Technology, 36-93, Pasadena, CA 925, USA z Universit a dipadova, Italy fxlfeng,peronag@vision.caltech.edu
Conditional Visual Tracking in Kernel Space
 Conditional Visual Tracking in Kernel Space Cristian Sminchisescu 1,2,3 Atul Kanujia 3 Zhiguo Li 3 Dimitris Metaxas 3 1 TTI-C, 1497 East 50th Street, Chicago, IL, 60637, USA 2 University of Toronto, Department
Conditional Visual Tracking in Kernel Space Cristian Sminchisescu 1,2,3 Atul Kanujia 3 Zhiguo Li 3 Dimitris Metaxas 3 1 TTI-C, 1497 East 50th Street, Chicago, IL, 60637, USA 2 University of Toronto, Department
Finding and Tracking People from the Bottom Up
 Finding and Tracking People from the Bottom Up Deva Ramanan and D. A. Forsyth Computer Science Division University of California, Berkeley Berkeley, CA 9472 ramanan@cs.berkeley.edu, daf@cs.berkeley.edu
Finding and Tracking People from the Bottom Up Deva Ramanan and D. A. Forsyth Computer Science Division University of California, Berkeley Berkeley, CA 9472 ramanan@cs.berkeley.edu, daf@cs.berkeley.edu
Model-based Visual Tracking:
 Technische Universität München Model-based Visual Tracking: the OpenTL framework Giorgio Panin Technische Universität München Institut für Informatik Lehrstuhl für Echtzeitsysteme und Robotik (Prof. Alois
Technische Universität München Model-based Visual Tracking: the OpenTL framework Giorgio Panin Technische Universität München Institut für Informatik Lehrstuhl für Echtzeitsysteme und Robotik (Prof. Alois
Hand Gesture Recognition using Multi-Scale Colour Features, Hierarchical Models and Particle Filtering
 Hand Gesture Recognition using Multi-Scale Colour Features, Hierarchical Models and Particle Filtering Lars Bretzner 1;2 Ivan Laptev 1 Tony Lindeberg 1 1 Computational Vision and Active Perception Laboratory
Hand Gesture Recognition using Multi-Scale Colour Features, Hierarchical Models and Particle Filtering Lars Bretzner 1;2 Ivan Laptev 1 Tony Lindeberg 1 1 Computational Vision and Active Perception Laboratory
Representation and Matching of Articulated Shapes
 Representation and Matching of Articulated Shapes Jiayong Zhang, Robert Collins and Yanxi Liu The Robotics Institute, Carnegie Mellon University, Pittsburgh, PA 11 {zhangjy,rcollins,yanxi}@cs.cmu.edu Abstract
Representation and Matching of Articulated Shapes Jiayong Zhang, Robert Collins and Yanxi Liu The Robotics Institute, Carnegie Mellon University, Pittsburgh, PA 11 {zhangjy,rcollins,yanxi}@cs.cmu.edu Abstract
Chapter 9 Object Tracking an Overview
 Chapter 9 Object Tracking an Overview The output of the background subtraction algorithm, described in the previous chapter, is a classification (segmentation) of pixels into foreground pixels (those belonging
Chapter 9 Object Tracking an Overview The output of the background subtraction algorithm, described in the previous chapter, is a classification (segmentation) of pixels into foreground pixels (those belonging
Tracking Algorithms. Lecture16: Visual Tracking I. Probabilistic Tracking. Joint Probability and Graphical Model. Deterministic methods
 Tracking Algorithms CSED441:Introduction to Computer Vision (2017F) Lecture16: Visual Tracking I Bohyung Han CSE, POSTECH bhhan@postech.ac.kr Deterministic methods Given input video and current state,
Tracking Algorithms CSED441:Introduction to Computer Vision (2017F) Lecture16: Visual Tracking I Bohyung Han CSE, POSTECH bhhan@postech.ac.kr Deterministic methods Given input video and current state,
An Adaptive Fusion Architecture for Target Tracking
 An Adaptive Fusion Architecture for Target Tracking Gareth Loy, Luke Fletcher, Nicholas Apostoloff and Alexander Zelinsky Department of Systems Engineering Research School of Information Sciences and Engineering
An Adaptive Fusion Architecture for Target Tracking Gareth Loy, Luke Fletcher, Nicholas Apostoloff and Alexander Zelinsky Department of Systems Engineering Research School of Information Sciences and Engineering
Hand-Eye Calibration from Image Derivatives
 Hand-Eye Calibration from Image Derivatives Abstract In this paper it is shown how to perform hand-eye calibration using only the normal flow field and knowledge about the motion of the hand. The proposed
Hand-Eye Calibration from Image Derivatives Abstract In this paper it is shown how to perform hand-eye calibration using only the normal flow field and knowledge about the motion of the hand. The proposed
Segmentation and Tracking of Partial Planar Templates
 Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014
 SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
Particle Filter in Brief. Robot Mapping. FastSLAM Feature-based SLAM with Particle Filters. Particle Representation. Particle Filter Algorithm
 Robot Mapping FastSLAM Feature-based SLAM with Particle Filters Cyrill Stachniss Particle Filter in Brief! Non-parametric, recursive Bayes filter! Posterior is represented by a set of weighted samples!
Robot Mapping FastSLAM Feature-based SLAM with Particle Filters Cyrill Stachniss Particle Filter in Brief! Non-parametric, recursive Bayes filter! Posterior is represented by a set of weighted samples!
Tracking of Human Body using Multiple Predictors
 Tracking of Human Body using Multiple Predictors Rui M Jesus 1, Arnaldo J Abrantes 1, and Jorge S Marques 2 1 Instituto Superior de Engenharia de Lisboa, Postfach 351-218317001, Rua Conselheiro Emído Navarro,
Tracking of Human Body using Multiple Predictors Rui M Jesus 1, Arnaldo J Abrantes 1, and Jorge S Marques 2 1 Instituto Superior de Engenharia de Lisboa, Postfach 351-218317001, Rua Conselheiro Emído Navarro,