CS 2770: Computer Vision. Edges and Segments. Prof. Adriana Kovashka University of Pittsburgh February 21, 2017
|
|
|
- Edward Allison
- 5 years ago
- Views:
Transcription
1 CS 2770: Computer Vision Edges and Segments Prof. Adriana Kovashka University of Pittsburgh February 21, 2017


2 Edges vs Segments Figure adapted from J. Hays
3 Edges vs Segments Edges More low-level Don t need to be closed Segments Ideally one segment for each semantic group/object Should include closed contours
4 Edge detection Goal: map image from 2d array of pixels to a set of curves or line segments or contours. Why? Figure from J. Shotton et al., PAMI 2007 Main idea: look for strong gradients, post-process Source: K. Grauman
5 Designing an edge detector Criteria for a good edge detector: Good detection: find all real edges, ignoring noise or other artifacts Good localization detect edges as close as possible to the true edges return one point only for each true edge point Cues of edge detection Differences in color, intensity, or texture across the boundary Continuity and closure High-level knowledge Source: L. Fei-Fei

6 What causes an edge? Reflectance change: appearance information, texture Depth discontinuity: object boundary Cast shadows Adapted from K. Grauman
 first derivative edges correspond to extrema of derivative Source: L.")
7 Characterizing edges An edge is a place of rapid change in the image intensity function image intensity function (along horizontal scanline) first derivative edges correspond to extrema of derivative Source: L. Lazebnik
8 Intensity profile Intensity Gradient Source: D. Hoiem

9 With a little Gaussian noise Gradient Source: D. Hoiem

10 Effects of noise Consider a single row or column of the image Plotting intensity as a function of position gives a signal Where is the edge? Source: S. Seitz
11 Effects of noise Difference filters respond strongly to noise Image noise results in pixels that look very different from their neighbors Generally, the larger the noise the stronger the response What can we do about it? Source: D. Forsyth
12 Solution: smooth first f g f * g d dx ( f g) To find edges, look for peaks in ( f g) d dx Source: S. Seitz
13 Derivative theorem of convolution Differentiation is convolution, and convolution is associative: d d ( f g) f g dx dx This saves us one operation: f Image with edge d dx g Derivative of Gaussian f d dx g Edge = max of derivative Source: S. Seitz
14 Canny edge detector Filter image with derivative of Gaussian Find magnitude and orientation of gradient Threshold: Determine which local maxima from filter output are actually edges Non-maximum suppression: Thin wide ridges down to single pixel width Linking and thresholding (hysteresis): Define two thresholds: low and high Use the high threshold to start edge curves and the low threshold to continue them Adapted from K. Grauman, D. Lowe, L. Fei-Fei

15 Example input image ( Lena )

16 Derivative of Gaussian filter x-direction y-direction Source: L. Lazebnik



17 Compute Gradients X-Derivative of Gaussian Y-Derivative of Gaussian Gradient Magnitude Source: D. Hoiem
18 Thresholding Choose a threshold value t Set any pixels less than t to 0 (off) Set any pixels greater than or equal to t to 1 (on) Source: K. Grauman
 Source: K.")
19 The Canny edge detector norm of the gradient (magnitude) Source: K. Grauman
20 The Canny edge detector thresholding Source: K. Grauman

21 Another example: Gradient magnitudes Source: K. Grauman
22 Thresholding gradient with a lower threshold Source: K. Grauman
23 Thresholding gradient with a higher threshold Source: K. Grauman

24 The Canny edge detector How to turn these thick regions of the gradient into curves? thresholding Source: K. Grauman

25 Non-maximum suppression Check if pixel is local maximum along gradient direction, select single max across width of the edge requires checking interpolated pixels p and r Source: K. Grauman
26 Bilinear interpolation
 Source: K. Grauman")
27 The Canny edge detector Problem: pixels along this edge didn t survive the thresholding thinning (non-maximum suppression) Source: K. Grauman

28 Hysteresis thresholding Threshold at low/high levels to get weak/strong edge pixels Do connected components, starting from strong edge pixels Source: D. Hoiem
29 Hysteresis thresholding Check that maximum value of gradient value is sufficiently large drop-outs? use hysteresis use a high threshold to start edge curves and a low threshold to continue them. Source: S. Seitz, D. Hoiem
 low threshold (weak edges) hysteresis threshold Source: L.")
30 Hysteresis thresholding original image high threshold (strong edges) low threshold (weak edges) hysteresis threshold Source: L. Fei-Fei
31 Hysteresis thresholding original image high threshold (strong edges) low threshold (weak edges) hysteresis threshold Source: L. Fei-Fei
 original Canny")


32 Effect of (Gaussian kernel spread/size) original Canny with Canny with The choice of depends on desired behavior large detects large scale edges small detects fine features Source: S. Seitz

33 Low-level edges vs. perceived contours image human segmentation gradient magnitude Berkeley segmentation database: Source: L. Lazebnik
34 How can we do better? So far, we have only considered change in intensity as a cue for the existence of an edge.

35 pb Boundary Detector Martin, Fowlkes, Malik 2004: Learning to Detection Natural Boundaries ects/cs/vision/grouping/papers/mfm-pamiboundary.pdf Figure from Fowlkes

36 pb Boundary Detector Figure from Fowlkes

37 Brightness Color Texture Combined Human

")

38 Results Pb (0.88) Human (0.95) Source: D. Hoiem



39 Results Pb Global Pb (0.88) Pb Human Human (0.96) Source: D. Hoiem

")

40 Results Pb (0.63) Human (0.95) Source: D. Hoiem
 Human (0.")


41 Results Pb (0.35) Human (0.90) For more: /CS/vision/bsds/bench/html/ color.html
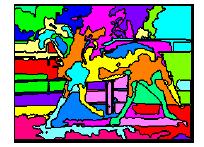
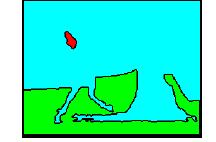
42 The goals of segmentation Separate image into coherent objects image human segmentation Source: L. Lazebnik


43 The goals of segmentation Separate image into coherent objects Group together similar-looking pixels for efficiency of further processing superpixels Source: L. Lazebnik X. Ren and J. Malik. Learning a classification model for segmentation. ICCV 2003.
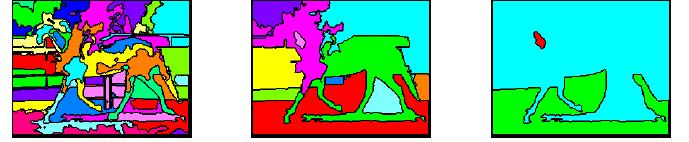

44 Types of segmentations Oversegmentation Undersegmentation Multiple Segmentations Source: D. Hoiem

45 Major processes for segmentation Bottom-up: group tokens with similar features Top-down: group tokens that likely belong to the same object Source: D. Hoiem [Levin and Weiss 2006]



![Shi]](/docs-images/82/85892074/images/46-3.jpg "Determine")















46 Examples of grouping in vision [Figure by J. Shi] Determine image regions [ epvidindex_img2.jpg] Group video frames into shots Fg / Bg [Figure by Wang & Suter] Figure-ground Source: K. Grauman [Figure by Grauman & Darrell] Object-level grouping
47 Grouping in vision Goals: Gather features that belong together Obtain an intermediate representation that compactly describes key image (video) parts Hard to measure success What is interesting depends on the application Adapted from K. Grauman
48 Segmentation and grouping Inspiration from human perception Gestalt properties Bottom-up segmentation via clustering Features: color, texture, Algorithms: Mode and density finding: k-means, mean-shift Graph-based: normalized cuts Adapted from K. Grauman
49 Gestalt cues for grouping Gestalt (psychology): Whole is greater than sum of its parts Relationships among parts yield additional information Psychologists identified series of factors that predispose set of elements to be grouped (by human visual system) Good intuition and basic principles for grouping Some are difficult to implement in practice Adapted from K. Grauman, D. Hoiem
50 Source: K. Grauman Gestaltism: We perceive the interpretation
51 Gestaltism: We perceive the interpretation The Muller-Lyer illusion Source: D. Hoiem

52 Source: D. Forsyth Gestaltism: We perceive the interpretation
53 Principles of perceptual organization Source: D. Hoiem From Steve Lehar: The Constructive Aspect of Visual Perception




54 Similarity


55 Common fate Image credit: Arthus-Bertrand (via F. Durand) Source: K. Grauman


56 Proximity
57 pixel count Image segmentation: toy example black pixels gray pixels white pixels input image intensity These intensities define the three groups. We could label every pixel in the image according to which of these primary intensities it is. i.e., segment the image based on the intensity feature. What if the image isn t quite so simple? Source: K. Grauman
58 pixel count pixel count input image intensity input image intensity Source: K. Grauman
59 pixel count input image intensity Now how to determine the three main intensities that define our groups? We need to cluster. Source: K. Grauman
60 intensity Goal: choose three centers as the representative intensities, and label every pixel according to which of these centers it is nearest to. Best cluster centers are those that minimize SSD between all points and their nearest cluster center ci: Source: K. Grauman
61 Clustering With this objective, it is a chicken and egg problem: If we knew the cluster centers, we could allocate points to groups by assigning each to its closest center. If we knew the group memberships, we could get the centers by computing the mean per group. Source: K. Grauman
62 K-means clustering Basic idea: randomly initialize the k cluster centers, and iterate between the two steps we just saw. 1. Randomly initialize the cluster centers, c 1,..., c K 2. Given cluster centers, determine points in each cluster For each point p, find the closest c i. Put p into cluster i 3. Given points in each cluster, solve for c i Set c i to be the mean of points in cluster i 4. If c i have changed, repeat Step 2 Properties Will always converge to some solution Can be a local minimum does not always find the global minimum of objective function: Source: Steve Seitz
63 Source: A. Moore
64 Source: A. Moore
65 Source: A. Moore

66 Source: A. Moore

67 Source: A. Moore

68 James Hays K-means converges to a local minimum
69 K-means: pros and cons Pros Simple, fast to compute Converges to local minimum of within-cluster squared error Cons/issues Setting k? One way: silhouette coefficient Sensitive to initial centers Use heuristics or output of another method Sensitive to outliers Detects spherical clusters Adapted from K. Grauman

70 An aside: Smoothing out cluster assignments Assigning a cluster label per pixel may yield outliers: original How to ensure they are spatially smooth? labeled by cluster center s intensity? Source: K. Grauman
71 Segmentation as clustering Depending on what we choose as the feature space, we can group pixels in different ways. Grouping pixels based on intensity similarity Feature space: intensity value (1-d) Source: K. Grauman

72 K=2 K=3 quantization of the feature space; segmentation label map Source: K. Grauman
 R R=15 G=189 B=2 R=3")
73 Segmentation as clustering Depending on what we choose as the feature space, we can group pixels in different ways. Grouping pixels based on color similarity R=255 G=200 B=250 B G R=245 G=220 B=248 Feature space: color value (3-d) R R=15 G=189 B=2 R=3 G=12 B=2 Source: K. Grauman
74 Segmentation as clustering Depending on what we choose as the feature space, we can group pixels in different ways. Grouping pixels based on intensity similarity Clusters based on intensity similarity don t have to be spatially coherent. Source: K. Grauman
75 Segmentation as clustering Depending on what we choose as the feature space, we can group pixels in different ways. Grouping pixels based on intensity+position similarity Intensity Y Source: K. Grauman X Both regions are black, but if we also include position (x,y), then we could group the two into distinct segments; way to encode both similarity & proximity.


76 Segmentation as clustering Color, brightness, position alone are not enough to distinguish all regions Source: L. Lazebnik
 Source: K.")
77 Segmentation as clustering Depending on what we choose as the feature space, we can group pixels in different ways. Grouping pixels based on texture similarity F 1 F 2 Filter bank of 24 filters F 24 Feature space: filter bank responses (e.g., 24-d) Source: K. Grauman

78 Count Count Count Segmentation w/ texture features Find textons by clustering vectors of filter bank outputs Describe texture in a window based on texton histogram Image Texton map Texton index Texton index Texton index Malik, Belongie, Leung and Shi, IJCV 2001 Source: L. Lazebnik

79 Source: K. Grauman Image segmentation example


80 K-means: pros and cons Pros Simple, fast to compute Converges to local minimum of within-cluster squared error Cons/issues Setting k? One way: silhouette coefficient Sensitive to initial centers Use heuristics or output of another method Sensitive to outliers Detects spherical clusters Adapted from K. Grauman
 Source: K.")
81 Mean shift algorithm The mean shift algorithm seeks modes or local maxima of density in the feature space image Feature space (L*u*v* color values) Source: K. Grauman

82 Kernel density estimation Kernel Estimated density Source: D. Hoiem Data (1-D)
83 Mean shift Search window Center of mass Mean Shift vector Slide by Y. Ukrainitz & B. Sarel
84 Mean shift Search window Center of mass Mean Shift vector Slide by Y. Ukrainitz & B. Sarel
85 Mean shift Search window Center of mass Mean Shift vector Slide by Y. Ukrainitz & B. Sarel
86 Mean shift Search window Center of mass Mean Shift vector Slide by Y. Ukrainitz & B. Sarel
87 Mean shift Search window Center of mass Mean Shift vector Slide by Y. Ukrainitz & B. Sarel
88 Mean shift Search window Center of mass Mean Shift vector Slide by Y. Ukrainitz & B. Sarel
89 Mean shift Search window Center of mass Slide by Y. Ukrainitz & B. Sarel

 Adapted from Y. Ukrainitz & B.")
90 Computing the mean shift Simple Mean Shift procedure: Compute mean shift vector Translate the Kernel window by m(x) Adapted from Y. Ukrainitz & B. Sarel
91 Source: D. Hoiem Points in same cluster converge
92 Mean shift clustering Cluster: all data points in the attraction basin of a mode Attraction basin: the region for which all trajectories lead to the same mode Slide by Y. Ukrainitz & B. Sarel
 Initialize windows at individual")

93 Mean shift clustering/segmentation Compute features for each point (color, texture, etc) Initialize windows at individual feature points Perform mean shift for each window until convergence Merge windows that end up near the same peak or mode Source: D. Hoiem


94 Mean shift segmentation results

95 Mean shift segmentation results
96 Pros: Does not assume shape on clusters Robust to outliers Cons/issues: Mean shift Need to choose window size Does not scale well with dimension of feature space Search for neighbors could be sped up in lower dimensions * *
97 Images as graphs q p w pq w Fully-connected graph node (vertex) for every pixel link between every pair of pixels, p,q affinity weight w pq for each link (edge) w pq measures similarity» similarity is inversely proportional to difference (in color and position ) Source: Steve Seitz
 similar pixels should be in the same segments dissimilar pixels should be in different segments Source: Steve")
98 Segmentation by Graph Cuts q p w pq w A B C Break Graph into Segments Want to delete links that cross between segments Easiest to break links that have low similarity (low weight) similar pixels should be in the same segments dissimilar pixels should be in different segments Source: Steve Seitz
99 Cuts in a graph: Min cut Link Cut A set of links whose removal makes a graph disconnected cost of a cut: cut( A, B) Find minimum cut gives you a segmentation fast algorithms exist for doing this B w p, q p A, q B Source: Steve Seitz
100 Cuts in a graph: Min cut Problem with minimum cut: Weight of cut proportional to number of edges in the cut; tends to produce small, isolated components. [Shi & Malik, 2000 PAMI] Source: K. Grauman
101 Cuts in a graph: Normalized cut A B Normalized Cut fix bias of Min Cut by normalizing for size of segments: cut( A, B) assoc( A, V ) cut( A, B) assoc( B, V ) assoc(a,v) = sum of weights of all edges that touch A Ncut value small when we get two clusters with many edges with high weights, and few edges of low weight between them Approximate solution for minimizing the Ncut value: generalized eigenvalue problem J. Shi and J. Malik, Normalized Cuts and Image Segmentation, CVPR, 1997 Source: Steve Seitz
102 So far, we discussed detecting low-level edges and contours, and grouping similar content via clustering. Finally, a few segmentation methods from recent conferences
 Create a CNN-based representation for each pixel Which CNN level to use? All of them!")
103 Hypercolumns for Object Segmentation and Finegrained Localization (Hariharan et al., CVPR 2015) Create a CNN-based representation for each pixel Which CNN level to use? All of them! Stack together activations from all layers above that pixel Upsample feature maps as needed
104 Hypercolumns for Object Segmentation and Finegrained Localization (Hariharan et al., CVPR 2015) Classify each pixel via a linear classifier (logistic regression) Train a grid of location-specific classifiers The prediction at a pixel is a linear combination of the nearby classifiers:

105 Hypercolumns for Object Segmentation and Finegrained Localization (Hariharan et al., CVPR 2015) Results:


106 Fully Convolutional Networks for Semantic Segmentation (Long et al., CVPR 2015) Adapt classification nets to produce dense outputs Combine info from different layers


107 Segmentation from Natural Language Expressions (Hu et al., ECCV 2016) Segment out regions requested via language (not just any regions for a particular object class)
Segmentation and Grouping
 CS 1699: Intro to Computer Vision Segmentation and Grouping Prof. Adriana Kovashka University of Pittsburgh September 24, 2015 Goals: Grouping in vision Gather features that belong together Obtain an intermediate
CS 1699: Intro to Computer Vision Segmentation and Grouping Prof. Adriana Kovashka University of Pittsburgh September 24, 2015 Goals: Grouping in vision Gather features that belong together Obtain an intermediate
Segmentation and Grouping April 19 th, 2018
 Segmentation and Grouping April 19 th, 2018 Yong Jae Lee UC Davis Features and filters Transforming and describing images; textures, edges 2 Grouping and fitting [fig from Shi et al] Clustering, segmentation,
Segmentation and Grouping April 19 th, 2018 Yong Jae Lee UC Davis Features and filters Transforming and describing images; textures, edges 2 Grouping and fitting [fig from Shi et al] Clustering, segmentation,
Outline. Segmentation & Grouping. Examples of grouping in vision. Grouping in vision. Grouping in vision 2/9/2011. CS 376 Lecture 7 Segmentation 1
 Outline What are grouping problems in vision? Segmentation & Grouping Wed, Feb 9 Prof. UT-Austin Inspiration from human perception Gestalt properties Bottom-up segmentation via clustering Algorithms: Mode
Outline What are grouping problems in vision? Segmentation & Grouping Wed, Feb 9 Prof. UT-Austin Inspiration from human perception Gestalt properties Bottom-up segmentation via clustering Algorithms: Mode
Grouping and Segmentation
 Grouping and Segmentation CS 554 Computer Vision Pinar Duygulu Bilkent University (Source:Kristen Grauman ) Goals: Grouping in vision Gather features that belong together Obtain an intermediate representation
Grouping and Segmentation CS 554 Computer Vision Pinar Duygulu Bilkent University (Source:Kristen Grauman ) Goals: Grouping in vision Gather features that belong together Obtain an intermediate representation
Segmentation and Grouping April 21 st, 2015
 Segmentation and Grouping April 21 st, 2015 Yong Jae Lee UC Davis Announcements PS0 grades are up on SmartSite Please put name on answer sheet 2 Features and filters Transforming and describing images;
Segmentation and Grouping April 21 st, 2015 Yong Jae Lee UC Davis Announcements PS0 grades are up on SmartSite Please put name on answer sheet 2 Features and filters Transforming and describing images;
CMPSCI 670: Computer Vision! Grouping
 CMPSCI 670: Computer Vision! Grouping University of Massachusetts, Amherst October 14, 2014 Instructor: Subhransu Maji Slides credit: Kristen Grauman and others Final project guidelines posted Milestones
CMPSCI 670: Computer Vision! Grouping University of Massachusetts, Amherst October 14, 2014 Instructor: Subhransu Maji Slides credit: Kristen Grauman and others Final project guidelines posted Milestones
Segmentation & Grouping Kristen Grauman UT Austin. Announcements
 Segmentation & Grouping Kristen Grauman UT Austin Tues Feb 7 A0 on Canvas Announcements No office hours today TA office hours this week as usual Guest lecture Thursday by Suyog Jain Interactive segmentation
Segmentation & Grouping Kristen Grauman UT Austin Tues Feb 7 A0 on Canvas Announcements No office hours today TA office hours this week as usual Guest lecture Thursday by Suyog Jain Interactive segmentation
CS 2750: Machine Learning. Clustering. Prof. Adriana Kovashka University of Pittsburgh January 17, 2017
 CS 2750: Machine Learning Clustering Prof. Adriana Kovashka University of Pittsburgh January 17, 2017 What is clustering? Grouping items that belong together (i.e. have similar features) Unsupervised:
CS 2750: Machine Learning Clustering Prof. Adriana Kovashka University of Pittsburgh January 17, 2017 What is clustering? Grouping items that belong together (i.e. have similar features) Unsupervised:
CS 4495 Computer Vision. Segmentation. Aaron Bobick (slides by Tucker Hermans) School of Interactive Computing. Segmentation
 School of Interactive Computing. Segmentation") CS 4495 Computer Vision Aaron Bobick (slides by Tucker Hermans) School of Interactive Computing Administrivia PS 4: Out but I was a bit late so due date pushed back to Oct 29. OpenCV now has real SIFT
CS 4495 Computer Vision Aaron Bobick (slides by Tucker Hermans) School of Interactive Computing Administrivia PS 4: Out but I was a bit late so due date pushed back to Oct 29. OpenCV now has real SIFT
The goals of segmentation
 Image segmentation The goals of segmentation Group together similar-looking pixels for efficiency of further processing Bottom-up process Unsupervised superpixels X. Ren and J. Malik. Learning a classification
Image segmentation The goals of segmentation Group together similar-looking pixels for efficiency of further processing Bottom-up process Unsupervised superpixels X. Ren and J. Malik. Learning a classification
Segmentation. Bottom Up Segmentation
 Segmentation Bottom up Segmentation Semantic Segmentation Bottom Up Segmentation 1 Segmentation as clustering Depending on what we choose as the feature space, we can group pixels in different ways. Grouping
Segmentation Bottom up Segmentation Semantic Segmentation Bottom Up Segmentation 1 Segmentation as clustering Depending on what we choose as the feature space, we can group pixels in different ways. Grouping
Edge and Texture. CS 554 Computer Vision Pinar Duygulu Bilkent University
 Edge and Texture CS 554 Computer Vision Pinar Duygulu Bilkent University Filters for features Previously, thinking of filtering as a way to remove or reduce noise Now, consider how filters will allow us
Edge and Texture CS 554 Computer Vision Pinar Duygulu Bilkent University Filters for features Previously, thinking of filtering as a way to remove or reduce noise Now, consider how filters will allow us
Edges and Binary Images
 CS 699: Intro to Computer Vision Edges and Binary Images Prof. Adriana Kovashka University of Pittsburgh September 5, 205 Plan for today Edge detection Binary image analysis Homework Due on 9/22, :59pm
CS 699: Intro to Computer Vision Edges and Binary Images Prof. Adriana Kovashka University of Pittsburgh September 5, 205 Plan for today Edge detection Binary image analysis Homework Due on 9/22, :59pm
Segmentation (continued)
") Segmentation (continued) Lecture 05 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr Mubarak Shah Professor, University of Central Florida The Robotics
Segmentation (continued) Lecture 05 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr Mubarak Shah Professor, University of Central Florida The Robotics
Edge detection. Goal: Identify sudden. an image. Ideal: artist s line drawing. object-level knowledge)
") Edge detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, most semantic and shape information from the image can be encoded in the edges More compact than pixels Ideal: artist
Edge detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, most semantic and shape information from the image can be encoded in the edges More compact than pixels Ideal: artist
Review of Filtering. Filtering in frequency domain
 Review of Filtering Filtering in frequency domain Can be faster than filtering in spatial domain (for large filters) Can help understand effect of filter Algorithm: 1. Convert image and filter to fft (fft2
Review of Filtering Filtering in frequency domain Can be faster than filtering in spatial domain (for large filters) Can help understand effect of filter Algorithm: 1. Convert image and filter to fft (fft2
Edge Detection. Computer Vision Shiv Ram Dubey, IIIT Sri City
 Edge Detection Computer Vision Shiv Ram Dubey, IIIT Sri City Previous two classes: Image Filtering Spatial domain Smoothing, sharpening, measuring texture * = FFT FFT Inverse FFT = Frequency domain Denoising,
Edge Detection Computer Vision Shiv Ram Dubey, IIIT Sri City Previous two classes: Image Filtering Spatial domain Smoothing, sharpening, measuring texture * = FFT FFT Inverse FFT = Frequency domain Denoising,
Applications. Foreground / background segmentation Finding skin-colored regions. Finding the moving objects. Intelligent scissors
 Segmentation I Goal Separate image into coherent regions Berkeley segmentation database: http://www.eecs.berkeley.edu/research/projects/cs/vision/grouping/segbench/ Slide by L. Lazebnik Applications Intelligent
Segmentation I Goal Separate image into coherent regions Berkeley segmentation database: http://www.eecs.berkeley.edu/research/projects/cs/vision/grouping/segbench/ Slide by L. Lazebnik Applications Intelligent
Edge Detection. CSC320: Introduction to Visual Computing Michael Guerzhoy. René Magritte, Decalcomania. Many slides from Derek Hoiem, Robert Collins
 Edge Detection René Magritte, Decalcomania Many slides from Derek Hoiem, Robert Collins CSC320: Introduction to Visual Computing Michael Guerzhoy Discontinuities in Intensity Source: Robert Collins Origin
Edge Detection René Magritte, Decalcomania Many slides from Derek Hoiem, Robert Collins CSC320: Introduction to Visual Computing Michael Guerzhoy Discontinuities in Intensity Source: Robert Collins Origin
Edge Detection CSC 767
 Edge Detection CSC 767 Edge detection Goal: Identify sudden changes (discontinuities) in an image Most semantic and shape information from the image can be encoded in the edges More compact than pixels
Edge Detection CSC 767 Edge detection Goal: Identify sudden changes (discontinuities) in an image Most semantic and shape information from the image can be encoded in the edges More compact than pixels
Segmentation and Grouping
 02/23/10 Segmentation and Grouping Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Last week Clustering EM Today s class More on EM Segmentation and grouping Gestalt cues By boundaries
02/23/10 Segmentation and Grouping Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Last week Clustering EM Today s class More on EM Segmentation and grouping Gestalt cues By boundaries
Lecture: k-means & mean-shift clustering
 Lecture: k-means & mean-shift clustering Juan Carlos Niebles and Ranjay Krishna Stanford Vision and Learning Lab 1 Recap: Image Segmentation Goal: identify groups of pixels that go together 2 Recap: Gestalt
Lecture: k-means & mean-shift clustering Juan Carlos Niebles and Ranjay Krishna Stanford Vision and Learning Lab 1 Recap: Image Segmentation Goal: identify groups of pixels that go together 2 Recap: Gestalt
Grouping and Segmentation
 03/17/15 Grouping and Segmentation Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Today s class Segmentation and grouping Gestalt cues By clustering (mean-shift) By boundaries (watershed)
03/17/15 Grouping and Segmentation Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Today s class Segmentation and grouping Gestalt cues By clustering (mean-shift) By boundaries (watershed)
Lecture: k-means & mean-shift clustering
 Lecture: k-means & mean-shift clustering Juan Carlos Niebles and Ranjay Krishna Stanford Vision and Learning Lab Lecture 11-1 Recap: Image Segmentation Goal: identify groups of pixels that go together
Lecture: k-means & mean-shift clustering Juan Carlos Niebles and Ranjay Krishna Stanford Vision and Learning Lab Lecture 11-1 Recap: Image Segmentation Goal: identify groups of pixels that go together
DIGITAL IMAGE PROCESSING
 The image part with relationship ID rid2 was not found in the file. DIGITAL IMAGE PROCESSING Lecture 6 Wavelets (cont), Lines and edges Tammy Riklin Raviv Electrical and Computer Engineering Ben-Gurion
The image part with relationship ID rid2 was not found in the file. DIGITAL IMAGE PROCESSING Lecture 6 Wavelets (cont), Lines and edges Tammy Riklin Raviv Electrical and Computer Engineering Ben-Gurion
Lecture 7: Segmentation. Thursday, Sept 20
 Lecture 7: Segmentation Thursday, Sept 20 Outline Why segmentation? Gestalt properties, fun illusions and/or revealing examples Clustering Hierarchical K-means Mean Shift Graph-theoretic Normalized cuts
Lecture 7: Segmentation Thursday, Sept 20 Outline Why segmentation? Gestalt properties, fun illusions and/or revealing examples Clustering Hierarchical K-means Mean Shift Graph-theoretic Normalized cuts
Solution: filter the image, then subsample F 1 F 2. subsample blur subsample. blur
 Pyramids Gaussian pre-filtering Solution: filter the image, then subsample blur F 0 subsample blur subsample * F 0 H F 1 F 1 * H F 2 { Gaussian pyramid blur F 0 subsample blur subsample * F 0 H F 1 F 1
Pyramids Gaussian pre-filtering Solution: filter the image, then subsample blur F 0 subsample blur subsample * F 0 H F 1 F 1 * H F 2 { Gaussian pyramid blur F 0 subsample blur subsample * F 0 H F 1 F 1
Edge and corner detection
 Edge and corner detection Prof. Stricker Doz. G. Bleser Computer Vision: Object and People Tracking Goals Where is the information in an image? How is an object characterized? How can I find measurements
Edge and corner detection Prof. Stricker Doz. G. Bleser Computer Vision: Object and People Tracking Goals Where is the information in an image? How is an object characterized? How can I find measurements
Edge detection. Winter in Kraków photographed by Marcin Ryczek
 Edge detection Winter in Kraków photographed by Marcin Ryczek Edge detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, most semantic and shape information from the image
Edge detection Winter in Kraków photographed by Marcin Ryczek Edge detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, most semantic and shape information from the image
Edge detection. Winter in Kraków photographed by Marcin Ryczek
 Edge detection Winter in Kraków photographed by Marcin Ryczek Edge detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, edges carry most of the semantic and shape information
Edge detection Winter in Kraków photographed by Marcin Ryczek Edge detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, edges carry most of the semantic and shape information
Segmentation & Clustering
 EECS 442 Computer vision Segmentation & Clustering Segmentation in human vision K-mean clustering Mean-shift Graph-cut Reading: Chapters 14 [FP] Some slides of this lectures are courtesy of prof F. Li,
EECS 442 Computer vision Segmentation & Clustering Segmentation in human vision K-mean clustering Mean-shift Graph-cut Reading: Chapters 14 [FP] Some slides of this lectures are courtesy of prof F. Li,
Lecture 16 Segmentation and Scene understanding
 Lecture 16 Segmentation and Scene understanding Introduction! Mean-shift! Graph-based segmentation! Top-down segmentation! Silvio Savarese Lecture 15 -! 3-Mar-14 Segmentation Silvio Savarese Lecture 15
Lecture 16 Segmentation and Scene understanding Introduction! Mean-shift! Graph-based segmentation! Top-down segmentation! Silvio Savarese Lecture 15 -! 3-Mar-14 Segmentation Silvio Savarese Lecture 15
What is an edge? Paint. Depth discontinuity. Material change. Texture boundary
 EDGES AND TEXTURES The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their
EDGES AND TEXTURES The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their
CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu. Lectures 21 & 22 Segmentation and clustering
 Ifeoma Nwogu. Lectures 21 & 22 Segmentation and clustering") CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu Lectures 21 & 22 Segmentation and clustering 1 Schedule Last class We started on segmentation Today Segmentation continued Readings
CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu Lectures 21 & 22 Segmentation and clustering 1 Schedule Last class We started on segmentation Today Segmentation continued Readings
2%34 #5 +,,% ! # %& ()% #% +,,%. & /%0%)( 1 ! # %& % %()# +(& ,.+/ +&0%//#/ &
% #% +,,%. & /%0%)( 1 ! # %& % %()# +(& ,.+/ +&0%//#/ &") ! # %& ()% #% +,,%. & /%0%)( 1 2%34 #5 +,,%! # %& % %()# +(&,.+/ +&0%//#/ & & Many slides in this lecture are due to other authors; they are credited on the bottom right Topics of This Lecture Problem
! # %& ()% #% +,,%. & /%0%)( 1 2%34 #5 +,,%! # %& % %()# +(&,.+/ +&0%//#/ & & Many slides in this lecture are due to other authors; they are credited on the bottom right Topics of This Lecture Problem
Edge Detection. CSE 576 Ali Farhadi. Many slides from Steve Seitz and Larry Zitnick
 Edge Detection CSE 576 Ali Farhadi Many slides from Steve Seitz and Larry Zitnick Edge Attneave's Cat (1954) Origin of edges surface normal discontinuity depth discontinuity surface color discontinuity
Edge Detection CSE 576 Ali Farhadi Many slides from Steve Seitz and Larry Zitnick Edge Attneave's Cat (1954) Origin of edges surface normal discontinuity depth discontinuity surface color discontinuity
Lecture 13: k-means and mean-shift clustering
 Lecture 13: k-means and mean-shift clustering Juan Carlos Niebles Stanford AI Lab Professor Stanford Vision Lab Lecture 13-1 Recap: Image Segmentation Goal: identify groups of pixels that go together Lecture
Lecture 13: k-means and mean-shift clustering Juan Carlos Niebles Stanford AI Lab Professor Stanford Vision Lab Lecture 13-1 Recap: Image Segmentation Goal: identify groups of pixels that go together Lecture
Prof. Feng Liu. Winter /15/2019
 Prof. Feng Liu Winter 2019 http://www.cs.pdx.edu/~fliu/courses/cs410/ 01/15/2019 Last Time Filter 2 Today More on Filter Feature Detection 3 Filter Re-cap noisy image naïve denoising Gaussian blur better
Prof. Feng Liu Winter 2019 http://www.cs.pdx.edu/~fliu/courses/cs410/ 01/15/2019 Last Time Filter 2 Today More on Filter Feature Detection 3 Filter Re-cap noisy image naïve denoising Gaussian blur better
Does everyone have an override code?
 Does everyone have an override code? Project 1 due Friday 9pm Review of Filtering Filtering in frequency domain Can be faster than filtering in spatial domain (for large filters) Can help understand effect
Does everyone have an override code? Project 1 due Friday 9pm Review of Filtering Filtering in frequency domain Can be faster than filtering in spatial domain (for large filters) Can help understand effect
CS 4495 Computer Vision. Linear Filtering 2: Templates, Edges. Aaron Bobick. School of Interactive Computing. Templates/Edges
 CS 4495 Computer Vision Linear Filtering 2: Templates, Edges Aaron Bobick School of Interactive Computing Last time: Convolution Convolution: Flip the filter in both dimensions (right to left, bottom to
CS 4495 Computer Vision Linear Filtering 2: Templates, Edges Aaron Bobick School of Interactive Computing Last time: Convolution Convolution: Flip the filter in both dimensions (right to left, bottom to
Image Segmentation. Selim Aksoy. Bilkent University
 Image Segmentation Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Examples of grouping in vision [http://poseidon.csd.auth.gr/lab_research/latest/imgs/s peakdepvidindex_img2.jpg]
Image Segmentation Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Examples of grouping in vision [http://poseidon.csd.auth.gr/lab_research/latest/imgs/s peakdepvidindex_img2.jpg]
Image Segmentation. Selim Aksoy. Bilkent University
 Image Segmentation Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Examples of grouping in vision [http://poseidon.csd.auth.gr/lab_research/latest/imgs/s peakdepvidindex_img2.jpg]
Image Segmentation Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Examples of grouping in vision [http://poseidon.csd.auth.gr/lab_research/latest/imgs/s peakdepvidindex_img2.jpg]
Image Segmentation continued Graph Based Methods. Some slides: courtesy of O. Capms, Penn State, J.Ponce and D. Fortsyth, Computer Vision Book
 Image Segmentation continued Graph Based Methods Some slides: courtesy of O. Capms, Penn State, J.Ponce and D. Fortsyth, Computer Vision Book Previously Binary segmentation Segmentation by thresholding
Image Segmentation continued Graph Based Methods Some slides: courtesy of O. Capms, Penn State, J.Ponce and D. Fortsyth, Computer Vision Book Previously Binary segmentation Segmentation by thresholding
Announcements. Segmentation & Grouping. Review questions. Outline. Grouping in vision. Examples of grouping in vision 9/21/2015
 Announcements Segmentation & Grouping Tues Sept 22 A2 goes out Thursday, due in 2 weeks Late submissions on Canvas Final exam dates now posted by registrar. Ours is Dec 9, 2-5 pm. Check in on pace Review
Announcements Segmentation & Grouping Tues Sept 22 A2 goes out Thursday, due in 2 weeks Late submissions on Canvas Final exam dates now posted by registrar. Ours is Dec 9, 2-5 pm. Check in on pace Review
Image gradients and edges
 Image gradients and edges Thurs Sept 3 Prof. Kristen Grauman UT-Austin Last time Various models for image noise Linear filters and convolution useful for Image smoothing, remov ing noise Box filter Gaussian
Image gradients and edges Thurs Sept 3 Prof. Kristen Grauman UT-Austin Last time Various models for image noise Linear filters and convolution useful for Image smoothing, remov ing noise Box filter Gaussian
Image Processing and Image Analysis VU
 Image Processing and Image Analysis 052617 VU Yll Haxhimusa yll.haxhimusa@medunwien.ac.at vda.univie.ac.at/teaching/ipa/17w/ Outline What are grouping problems in vision? Inspiration from human perception
Image Processing and Image Analysis 052617 VU Yll Haxhimusa yll.haxhimusa@medunwien.ac.at vda.univie.ac.at/teaching/ipa/17w/ Outline What are grouping problems in vision? Inspiration from human perception
Segmentation Computer Vision Spring 2018, Lecture 27
 Segmentation http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 218, Lecture 27 Course announcements Homework 7 is due on Sunday 6 th. - Any questions about homework 7? - How many of you have
Segmentation http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 218, Lecture 27 Course announcements Homework 7 is due on Sunday 6 th. - Any questions about homework 7? - How many of you have
Digital Image Processing
 Digital Image Processing Segmentation Material in this presentation is largely based on/derived from presentations by: Sventlana Lazebnik, and Noah Snavely Brent M. Dingle, Ph.D. 2015 Game Design and Development
Digital Image Processing Segmentation Material in this presentation is largely based on/derived from presentations by: Sventlana Lazebnik, and Noah Snavely Brent M. Dingle, Ph.D. 2015 Game Design and Development
Computer Vision Lecture 6
 Computer Vision Lecture 6 Segmentation 12.11.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Course Outline Image Processing Basics Structure Extraction Segmentation
Computer Vision Lecture 6 Segmentation 12.11.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Course Outline Image Processing Basics Structure Extraction Segmentation
Lecture 10: Semantic Segmentation and Clustering
 Lecture 10: Semantic Segmentation and Clustering Vineet Kosaraju, Davy Ragland, Adrien Truong, Effie Nehoran, Maneekwan Toyungyernsub Department of Computer Science Stanford University Stanford, CA 94305
Lecture 10: Semantic Segmentation and Clustering Vineet Kosaraju, Davy Ragland, Adrien Truong, Effie Nehoran, Maneekwan Toyungyernsub Department of Computer Science Stanford University Stanford, CA 94305
Edges and Binary Image Analysis April 12 th, 2018
 4/2/208 Edges and Binary Image Analysis April 2 th, 208 Yong Jae Lee UC Davis Previously Filters allow local image neighborhood to influence our description and features Smoothing to reduce noise Derivatives
4/2/208 Edges and Binary Image Analysis April 2 th, 208 Yong Jae Lee UC Davis Previously Filters allow local image neighborhood to influence our description and features Smoothing to reduce noise Derivatives
Digital Image Processing COSC 6380/4393
 Digital Image Processing COSC 6380/4393 Lecture 21 Nov 16 th, 2017 Pranav Mantini Ack: Shah. M Image Processing Geometric Transformation Point Operations Filtering (spatial, Frequency) Input Restoration/
Digital Image Processing COSC 6380/4393 Lecture 21 Nov 16 th, 2017 Pranav Mantini Ack: Shah. M Image Processing Geometric Transformation Point Operations Filtering (spatial, Frequency) Input Restoration/
Image gradients and edges April 11 th, 2017
 4//27 Image gradients and edges April th, 27 Yong Jae Lee UC Davis PS due this Friday Announcements Questions? 2 Last time Image formation Linear filters and convolution useful for Image smoothing, removing
4//27 Image gradients and edges April th, 27 Yong Jae Lee UC Davis PS due this Friday Announcements Questions? 2 Last time Image formation Linear filters and convolution useful for Image smoothing, removing
Image gradients and edges April 10 th, 2018
 Image gradients and edges April th, 28 Yong Jae Lee UC Davis PS due this Friday Announcements Questions? 2 Last time Image formation Linear filters and convolution useful for Image smoothing, removing
Image gradients and edges April th, 28 Yong Jae Lee UC Davis PS due this Friday Announcements Questions? 2 Last time Image formation Linear filters and convolution useful for Image smoothing, removing
Image Analysis. Edge Detection
 Image Analysis Edge Detection Christophoros Nikou cnikou@cs.uoi.gr Images taken from: Computer Vision course by Kristen Grauman, University of Texas at Austin (http://www.cs.utexas.edu/~grauman/courses/spring2011/index.html).
Image Analysis Edge Detection Christophoros Nikou cnikou@cs.uoi.gr Images taken from: Computer Vision course by Kristen Grauman, University of Texas at Austin (http://www.cs.utexas.edu/~grauman/courses/spring2011/index.html).
Lecture 7: Most Common Edge Detectors
 #1 Lecture 7: Most Common Edge Detectors Saad Bedros sbedros@umn.edu Edge Detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, most semantic and shape information from the
#1 Lecture 7: Most Common Edge Detectors Saad Bedros sbedros@umn.edu Edge Detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, most semantic and shape information from the
Image Segmentation continued Graph Based Methods
 Image Segmentation continued Graph Based Methods Previously Images as graphs Fully-connected graph node (vertex) for every pixel link between every pair of pixels, p,q affinity weight w pq for each link
Image Segmentation continued Graph Based Methods Previously Images as graphs Fully-connected graph node (vertex) for every pixel link between every pair of pixels, p,q affinity weight w pq for each link
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely Lecture 2: Edge detection From Sandlot Science Announcements Project 1 (Hybrid Images) is now on the course webpage (see Projects link) Due Wednesday, Feb 15, by 11:59pm
CS5670: Computer Vision Noah Snavely Lecture 2: Edge detection From Sandlot Science Announcements Project 1 (Hybrid Images) is now on the course webpage (see Projects link) Due Wednesday, Feb 15, by 11:59pm
[ ] Review. Edges and Binary Images. Edge detection. Derivative of Gaussian filter. Image gradient. Tuesday, Sept 16
![[ ] Review. Edges and Binary Images. Edge detection. Derivative of Gaussian filter. Image gradient. Tuesday, Sept 16](/thumbs/89/98496315.jpg "[ ] Review. Edges and Binary Images. Edge detection. Derivative of Gaussian filter. Image gradient. Tuesday, Sept 16") Review Edges and Binary Images Tuesday, Sept 6 Thought question: how could we compute a temporal gradient from video data? What filter is likely to have produced this image output? original filtered output
Review Edges and Binary Images Tuesday, Sept 6 Thought question: how could we compute a temporal gradient from video data? What filter is likely to have produced this image output? original filtered output
Previously. Edge detection. Today. Thresholding. Gradients -> edges 2/1/2011. Edges and Binary Image Analysis
 2//20 Previously Edges and Binary Image Analysis Mon, Jan 3 Prof. Kristen Grauman UT-Austin Filters allow local image neighborhood to influence our description and features Smoothing to reduce noise Derivatives
2//20 Previously Edges and Binary Image Analysis Mon, Jan 3 Prof. Kristen Grauman UT-Austin Filters allow local image neighborhood to influence our description and features Smoothing to reduce noise Derivatives
CS 534: Computer Vision Segmentation and Perceptual Grouping
 CS 534: Computer Vision Segmentation and Perceptual Grouping Ahmed Elgammal Dept of Computer Science CS 534 Segmentation - 1 Outlines Mid-level vision What is segmentation Perceptual Grouping Segmentation
CS 534: Computer Vision Segmentation and Perceptual Grouping Ahmed Elgammal Dept of Computer Science CS 534 Segmentation - 1 Outlines Mid-level vision What is segmentation Perceptual Grouping Segmentation
Fitting: Voting and the Hough Transform April 23 rd, Yong Jae Lee UC Davis
 Fitting: Voting and the Hough Transform April 23 rd, 2015 Yong Jae Lee UC Davis Last time: Grouping Bottom-up segmentation via clustering To find mid-level regions, tokens General choices -- features,
Fitting: Voting and the Hough Transform April 23 rd, 2015 Yong Jae Lee UC Davis Last time: Grouping Bottom-up segmentation via clustering To find mid-level regions, tokens General choices -- features,
Edges and Binary Image Analysis. Thurs Jan 26 Kristen Grauman UT Austin. Today. Edge detection and matching
 /25/207 Edges and Binary Image Analysis Thurs Jan 26 Kristen Grauman UT Austin Today Edge detection and matching process the image gradient to find curves/contours comparing contours Binary image analysis
/25/207 Edges and Binary Image Analysis Thurs Jan 26 Kristen Grauman UT Austin Today Edge detection and matching process the image gradient to find curves/contours comparing contours Binary image analysis
Image Analysis. Segmentation by Clustering
 Image Analysis Segmentation by Clustering Christophoros Nikou cnikou@cs.uoi.gr Images taken from: D. Forsyth and J. Ponce. Computer Vision: A Modern Approach, Prentice Hall, 2003. Computer Vision course
Image Analysis Segmentation by Clustering Christophoros Nikou cnikou@cs.uoi.gr Images taken from: D. Forsyth and J. Ponce. Computer Vision: A Modern Approach, Prentice Hall, 2003. Computer Vision course
Image gradients and edges
 Image gradients and edges April 7 th, 2015 Yong Jae Lee UC Davis Announcements PS0 due this Friday Questions? 2 Last time Image formation Linear filters and convolution useful for Image smoothing, removing
Image gradients and edges April 7 th, 2015 Yong Jae Lee UC Davis Announcements PS0 due this Friday Questions? 2 Last time Image formation Linear filters and convolution useful for Image smoothing, removing
Lecture 4: Finding lines: from detection to model fitting
 Lecture 4: Finding lines: from detection to model fitting Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today Edge detection Canny edge detector Line fitting Hough Transform RANSAC (Problem
Lecture 4: Finding lines: from detection to model fitting Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today Edge detection Canny edge detector Line fitting Hough Transform RANSAC (Problem
Computer Vision Lecture 6
 Course Outline Computer Vision Lecture 6 Segmentation Image Processing Basics Structure Extraction Segmentation Segmentation as Clustering Graph-theoretic Segmentation 12.11.2015 Recognition Global Representations
Course Outline Computer Vision Lecture 6 Segmentation Image Processing Basics Structure Extraction Segmentation Segmentation as Clustering Graph-theoretic Segmentation 12.11.2015 Recognition Global Representations
Low-level Vision Processing Algorithms Speaker: Ito, Dang Supporter: Ishii, Toyama and Y. Murakami
 Low-level Vision Processing Algorithms Speaker: Ito, Dang Supporter: Ishii, Toyama and Y. Murakami Adaptive Systems Lab The University of Aizu Overview Introduction What is Vision Processing? Basic Knowledge
Low-level Vision Processing Algorithms Speaker: Ito, Dang Supporter: Ishii, Toyama and Y. Murakami Adaptive Systems Lab The University of Aizu Overview Introduction What is Vision Processing? Basic Knowledge
Edge Detection. EE/CSE 576 Linda Shapiro
 Edge Detection EE/CSE 576 Linda Shapiro Edge Attneave's Cat (1954) 2 Origin of edges surface normal discontinuity depth discontinuity surface color discontinuity illumination discontinuity Edges are caused
Edge Detection EE/CSE 576 Linda Shapiro Edge Attneave's Cat (1954) 2 Origin of edges surface normal discontinuity depth discontinuity surface color discontinuity illumination discontinuity Edges are caused
Boundaries and Sketches
 Boundaries and Sketches Szeliski 4.2 Computer Vision James Hays Many slides from Michael Maire, Jitendra Malek Today s lecture Segmentation vs Boundary Detection Why boundaries / Grouping? Recap: Canny
Boundaries and Sketches Szeliski 4.2 Computer Vision James Hays Many slides from Michael Maire, Jitendra Malek Today s lecture Segmentation vs Boundary Detection Why boundaries / Grouping? Recap: Canny
Normalized cuts and image segmentation
 Normalized cuts and image segmentation Department of EE University of Washington Yeping Su Xiaodan Song Normalized Cuts and Image Segmentation, IEEE Trans. PAMI, August 2000 5/20/2003 1 Outline 1. Image
Normalized cuts and image segmentation Department of EE University of Washington Yeping Su Xiaodan Song Normalized Cuts and Image Segmentation, IEEE Trans. PAMI, August 2000 5/20/2003 1 Outline 1. Image
Image Analysis. Edge Detection
 Image Analysis Edge Detection Christophoros Nikou cnikou@cs.uoi.gr Images taken from: Computer Vision course by Kristen Grauman, University of Texas at Austin (http://www.cs.utexas.edu/~grauman/courses/spring2011/index.html).
Image Analysis Edge Detection Christophoros Nikou cnikou@cs.uoi.gr Images taken from: Computer Vision course by Kristen Grauman, University of Texas at Austin (http://www.cs.utexas.edu/~grauman/courses/spring2011/index.html).
Clustering. Subhransu Maji. CMPSCI 689: Machine Learning. 2 April April 2015
 Clustering Subhransu Maji CMPSCI 689: Machine Learning 2 April 2015 7 April 2015 So far in the course Supervised learning: learning with a teacher You had training data which was (feature, label) pairs
Clustering Subhransu Maji CMPSCI 689: Machine Learning 2 April 2015 7 April 2015 So far in the course Supervised learning: learning with a teacher You had training data which was (feature, label) pairs
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.
 CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 11 Segmentation And Clustering Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 11 Segmentation And Clustering Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering
CS4670: Computer Vision Noah Snavely
 CS4670: Computer Vision Noah Snavely Lecture 2: Edge detection From Sandlot Science Announcements Project 1 released, due Friday, September 7 1 Edge detection Convert a 2D image into a set of curves Extracts
CS4670: Computer Vision Noah Snavely Lecture 2: Edge detection From Sandlot Science Announcements Project 1 released, due Friday, September 7 1 Edge detection Convert a 2D image into a set of curves Extracts
Computer Vision I. Announcements. Fourier Tansform. Efficient Implementation. Edge and Corner Detection. CSE252A Lecture 13.
 Announcements Edge and Corner Detection HW3 assigned CSE252A Lecture 13 Efficient Implementation Both, the Box filter and the Gaussian filter are separable: First convolve each row of input image I with
Announcements Edge and Corner Detection HW3 assigned CSE252A Lecture 13 Efficient Implementation Both, the Box filter and the Gaussian filter are separable: First convolve each row of input image I with
Filtering in frequency domain
 Filtering in frequency domain FFT FFT = Inverse FFT Filtering in frequency domain Can be faster than filtering in spatial domain (for large filters) Can help understand effect of filter Algorithm: 1. Convert
Filtering in frequency domain FFT FFT = Inverse FFT Filtering in frequency domain Can be faster than filtering in spatial domain (for large filters) Can help understand effect of filter Algorithm: 1. Convert
Announcements. Image Segmentation. From images to objects. Extracting objects. Status reports next Thursday ~5min presentations in class
 Image Segmentation Announcements Status reports next Thursday ~5min presentations in class Project voting From Sandlot Science Today s Readings Forsyth & Ponce, Chapter 1 (plus lots of optional references
Image Segmentation Announcements Status reports next Thursday ~5min presentations in class Project voting From Sandlot Science Today s Readings Forsyth & Ponce, Chapter 1 (plus lots of optional references
Image Segmentation. Computer Vision Jia-Bin Huang, Virginia Tech. Many slides from D. Hoiem
 Image Segmentation Computer Vision Jia-Bin Huang, Virginia Tech Many slides from D. Hoiem Administrative stuffs HW 3 due 11:59 PM, Oct 25 (Wed) Final project proposal due Oct 30 (Mon) Title Problem Tentative
Image Segmentation Computer Vision Jia-Bin Huang, Virginia Tech Many slides from D. Hoiem Administrative stuffs HW 3 due 11:59 PM, Oct 25 (Wed) Final project proposal due Oct 30 (Mon) Title Problem Tentative
Computer Vision I. Announcement. Corners. Edges. Numerical Derivatives f(x) Edge and Corner Detection. CSE252A Lecture 11
 Edge and Corner Detection. CSE252A Lecture 11") Announcement Edge and Corner Detection Slides are posted HW due Friday CSE5A Lecture 11 Edges Corners Edge is Where Change Occurs: 1-D Change is measured by derivative in 1D Numerical Derivatives f(x)
Announcement Edge and Corner Detection Slides are posted HW due Friday CSE5A Lecture 11 Edges Corners Edge is Where Change Occurs: 1-D Change is measured by derivative in 1D Numerical Derivatives f(x)
Lecture 6: Edge Detection
 #1 Lecture 6: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Options for Image Representation Introduced the concept of different representation or transformation Fourier Transform
#1 Lecture 6: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Options for Image Representation Introduced the concept of different representation or transformation Fourier Transform
Image Segmentation. Marc Pollefeys. ETH Zurich. Slide credits: V. Ferrari, K. Grauman, B. Leibe, S. Lazebnik, S. Seitz,Y Boykov, W. Freeman, P.
 Image Segmentation Perceptual and Sensory Augmented Computing Computer Vision WS 0/09 Marc Pollefeys ETH Zurich Slide credits: V. Ferrari, K. Grauman, B. Leibe, S. Lazebnik, S. Seitz,Y Boykov, W. Freeman,
Image Segmentation Perceptual and Sensory Augmented Computing Computer Vision WS 0/09 Marc Pollefeys ETH Zurich Slide credits: V. Ferrari, K. Grauman, B. Leibe, S. Lazebnik, S. Seitz,Y Boykov, W. Freeman,
Edge Detection. Announcements. Edge detection. Origin of Edges. Mailing list: you should have received messages
 Announcements Mailing list: csep576@cs.washington.edu you should have received messages Project 1 out today (due in two weeks) Carpools Edge Detection From Sandlot Science Today s reading Forsyth, chapters
Announcements Mailing list: csep576@cs.washington.edu you should have received messages Project 1 out today (due in two weeks) Carpools Edge Detection From Sandlot Science Today s reading Forsyth, chapters
Edge Detection (with a sidelight introduction to linear, associative operators). Images
. Images") Images (we will, eventually, come back to imaging geometry. But, now that we know how images come from the world, we will examine operations on images). Edge Detection (with a sidelight introduction to
Images (we will, eventually, come back to imaging geometry. But, now that we know how images come from the world, we will examine operations on images). Edge Detection (with a sidelight introduction to
Other Linear Filters CS 211A
 Other Linear Filters CS 211A Slides from Cornelia Fermüller and Marc Pollefeys Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin
Other Linear Filters CS 211A Slides from Cornelia Fermüller and Marc Pollefeys Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin
Edge Detection. Today s reading. Cipolla & Gee on edge detection (available online) From Sandlot Science
 From Sandlot Science") Edge Detection From Sandlot Science Today s reading Cipolla & Gee on edge detection (available online) Project 1a assigned last Friday due this Friday Last time: Cross-correlation Let be the image, be
Edge Detection From Sandlot Science Today s reading Cipolla & Gee on edge detection (available online) Project 1a assigned last Friday due this Friday Last time: Cross-correlation Let be the image, be
6.801/866. Segmentation and Line Fitting. T. Darrell
 6.801/866 Segmentation and Line Fitting T. Darrell Segmentation and Line Fitting Gestalt grouping Background subtraction K-Means Graph cuts Hough transform Iterative fitting (Next time: Probabilistic segmentation)
6.801/866 Segmentation and Line Fitting T. Darrell Segmentation and Line Fitting Gestalt grouping Background subtraction K-Means Graph cuts Hough transform Iterative fitting (Next time: Probabilistic segmentation)
Motion illusion, rotating snakes
 Motion illusion, rotating snakes Local features: main components 1) Detection: Find a set of distinctive key points. 2) Description: Extract feature descriptor around each interest point as vector. x 1
Motion illusion, rotating snakes Local features: main components 1) Detection: Find a set of distinctive key points. 2) Description: Extract feature descriptor around each interest point as vector. x 1
Image Segmentation. Luc Van Gool, ETH Zurich. Vittorio Ferrari, Un. of Edinburgh. With important contributions by
 Image Segmentation Perceptual and Sensory Augmented Computing Computer Vision WS 0/09 Luc Van Gool, ETH Zurich With important contributions by Vittorio Ferrari, Un. of Edinburgh Slide credits: K. Grauman,
Image Segmentation Perceptual and Sensory Augmented Computing Computer Vision WS 0/09 Luc Van Gool, ETH Zurich With important contributions by Vittorio Ferrari, Un. of Edinburgh Slide credits: K. Grauman,
Targil 12 : Image Segmentation. Image segmentation. Why do we need it? Image segmentation
 Targil : Image Segmentation Image segmentation Many slides from Steve Seitz Segment region of the image which: elongs to a single object. Looks uniform (gray levels, color ) Have the same attributes (texture
Targil : Image Segmentation Image segmentation Many slides from Steve Seitz Segment region of the image which: elongs to a single object. Looks uniform (gray levels, color ) Have the same attributes (texture
Anno accademico 2006/2007. Davide Migliore
 Robotica Anno accademico 6/7 Davide Migliore migliore@elet.polimi.it Today What is a feature? Some useful information The world of features: Detectors Edges detection Corners/Points detection Descriptors?!?!?
Robotica Anno accademico 6/7 Davide Migliore migliore@elet.polimi.it Today What is a feature? Some useful information The world of features: Detectors Edges detection Corners/Points detection Descriptors?!?!?
convolution shift invariant linear system Fourier Transform Aliasing and sampling scale representation edge detection corner detection
 COS 429: COMPUTER VISON Linear Filters and Edge Detection convolution shift invariant linear system Fourier Transform Aliasing and sampling scale representation edge detection corner detection Reading:
COS 429: COMPUTER VISON Linear Filters and Edge Detection convolution shift invariant linear system Fourier Transform Aliasing and sampling scale representation edge detection corner detection Reading:
Peripheral drift illusion
 Peripheral drift illusion Does it work on other animals? Computer Vision Motion and Optical Flow Many slides adapted from J. Hays, S. Seitz, R. Szeliski, M. Pollefeys, K. Grauman and others Video A video
Peripheral drift illusion Does it work on other animals? Computer Vision Motion and Optical Flow Many slides adapted from J. Hays, S. Seitz, R. Szeliski, M. Pollefeys, K. Grauman and others Video A video
Clustering. So far in the course. Clustering. Clustering. Subhransu Maji. CMPSCI 689: Machine Learning. dist(x, y) = x y 2 2
 = x y 2 2") So far in the course Clustering Subhransu Maji : Machine Learning 2 April 2015 7 April 2015 Supervised learning: learning with a teacher You had training data which was (feature, label) pairs and the goal
So far in the course Clustering Subhransu Maji : Machine Learning 2 April 2015 7 April 2015 Supervised learning: learning with a teacher You had training data which was (feature, label) pairs and the goal
CS 534: Computer Vision Segmentation and Perceptual Grouping
 CS 534: Computer Vision Segmentation and Perceptual Grouping Spring 2005 Ahmed Elgammal Dept of Computer Science CS 534 Segmentation - 1 Where are we? Image Formation Human vision Cameras Geometric Camera
CS 534: Computer Vision Segmentation and Perceptual Grouping Spring 2005 Ahmed Elgammal Dept of Computer Science CS 534 Segmentation - 1 Where are we? Image Formation Human vision Cameras Geometric Camera
Edge detection. Convert a 2D image into a set of curves. Extracts salient features of the scene More compact than pixels
 Edge Detection Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin of Edges surface normal discontinuity depth discontinuity surface
Edge Detection Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin of Edges surface normal discontinuity depth discontinuity surface
Multimedia Computing: Algorithms, Systems, and Applications: Edge Detection
 Multimedia Computing: Algorithms, Systems, and Applications: Edge Detection By Dr. Yu Cao Department of Computer Science The University of Massachusetts Lowell Lowell, MA 01854, USA Part of the slides
Multimedia Computing: Algorithms, Systems, and Applications: Edge Detection By Dr. Yu Cao Department of Computer Science The University of Massachusetts Lowell Lowell, MA 01854, USA Part of the slides
In this lecture, we are going to talk about image segmentation, essentially defined as methods for grouping pixels together.
 In this lecture, we are going to talk about image segmentation, essentially defined as methods for grouping pixels together. We will first define the segmentation problem, overview some basic ideas of
In this lecture, we are going to talk about image segmentation, essentially defined as methods for grouping pixels together. We will first define the segmentation problem, overview some basic ideas of
3 October, 2013 MVA ENS Cachan. Lecture 2: Logistic regression & intro to MIL Iasonas Kokkinos
 Machine Learning for Computer Vision 1 3 October, 2013 MVA ENS Cachan Lecture 2: Logistic regression & intro to MIL Iasonas Kokkinos Iasonas.kokkinos@ecp.fr Department of Applied Mathematics Ecole Centrale
Machine Learning for Computer Vision 1 3 October, 2013 MVA ENS Cachan Lecture 2: Logistic regression & intro to MIL Iasonas Kokkinos Iasonas.kokkinos@ecp.fr Department of Applied Mathematics Ecole Centrale
Lecture 13 Segmentation and Scene Understanding Chris Choy, Ph.D. candidate Stanford Vision and Learning Lab (SVL)
") Lecture 13 Segmentation and Scene Understanding Chris Choy, Ph.D. candidate Stanford Vision and Learning Lab (SVL) http://chrischoy.org Stanford CS231A 1 Understanding a Scene Objects Chairs, Cups, Tables,
Lecture 13 Segmentation and Scene Understanding Chris Choy, Ph.D. candidate Stanford Vision and Learning Lab (SVL) http://chrischoy.org Stanford CS231A 1 Understanding a Scene Objects Chairs, Cups, Tables,