Streamline Pathline Eulerian Lagrangian
|
|
|
- Vivian Montgomery
- 5 years ago
- Views:
Transcription


1

2
3 Sreamline Pahline Eulerian Lagrangian




4



5
6


7

8 Sagnaion Poin Flow V V V = + = + = + o V xi y j a V V xi y j o


9 Pahline and Sreakline
10 Insananeous Sreamlines Pahlines Sreaklines






11





12

13




14
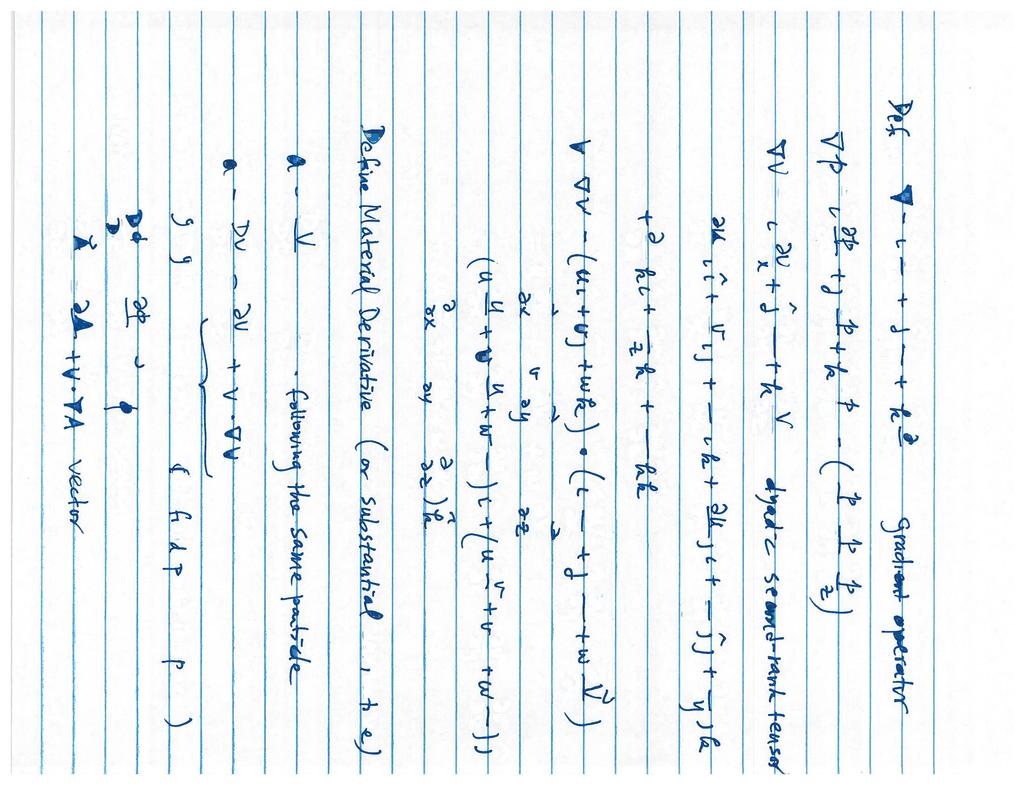
15 Maerial Derivaive Acceleraion


16

17






18





19

20

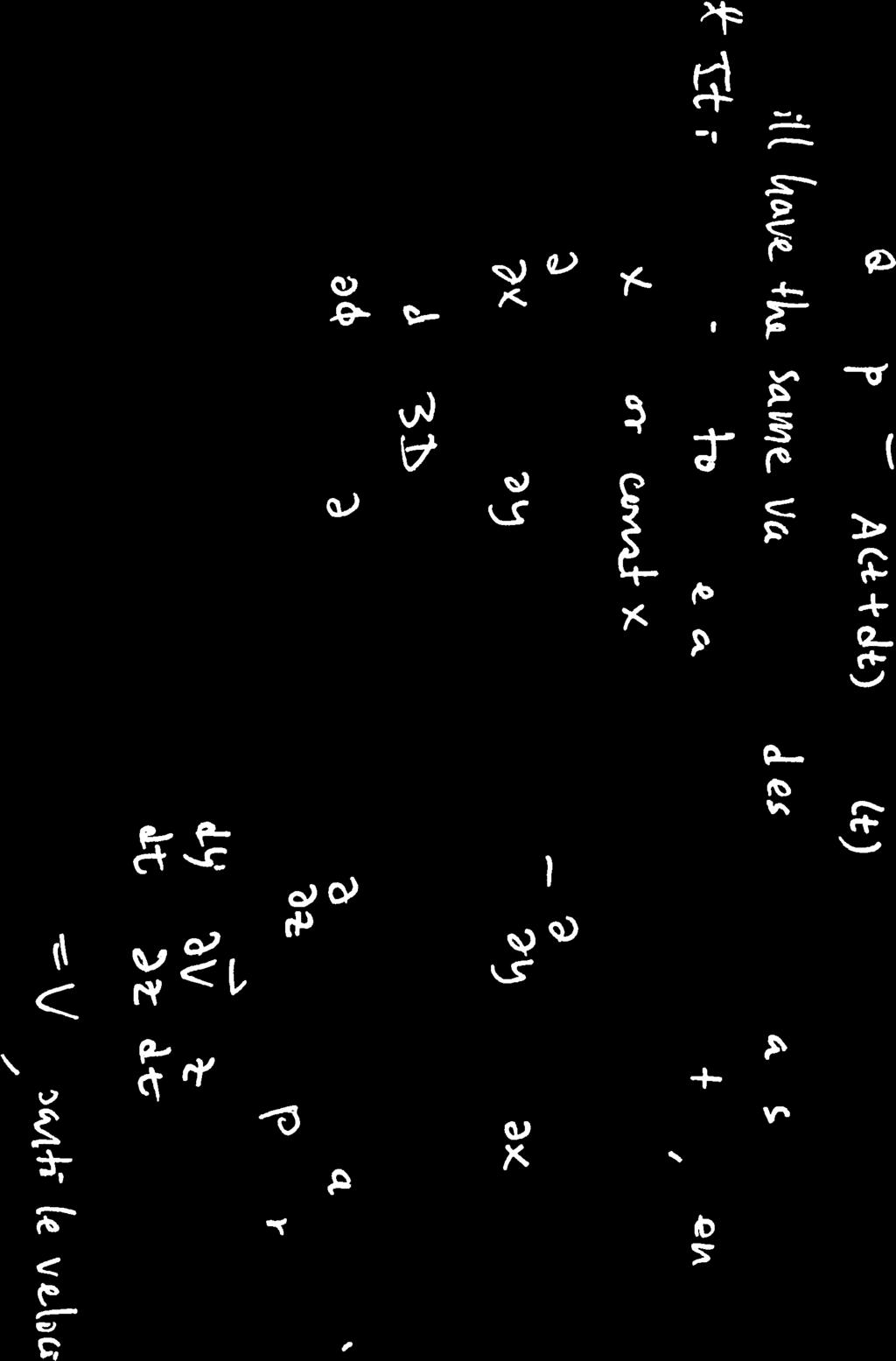
21 D = + V D DT T = + V T D DV V = + V V D

22
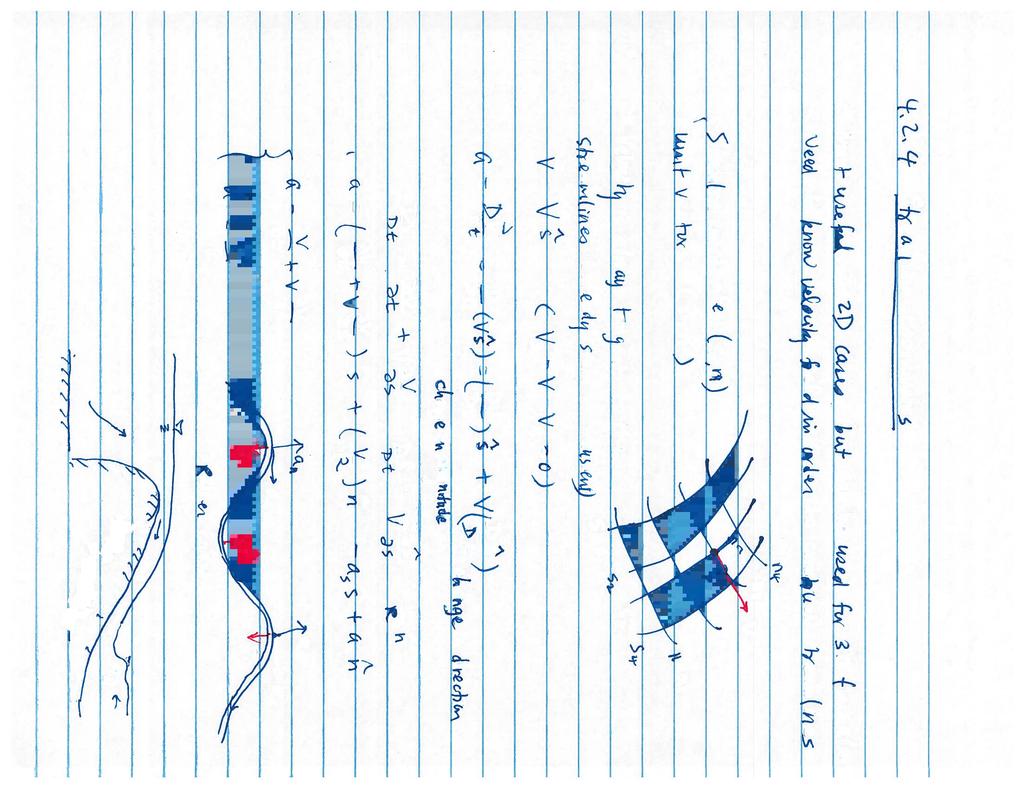
23 Sreamline Coordinaes
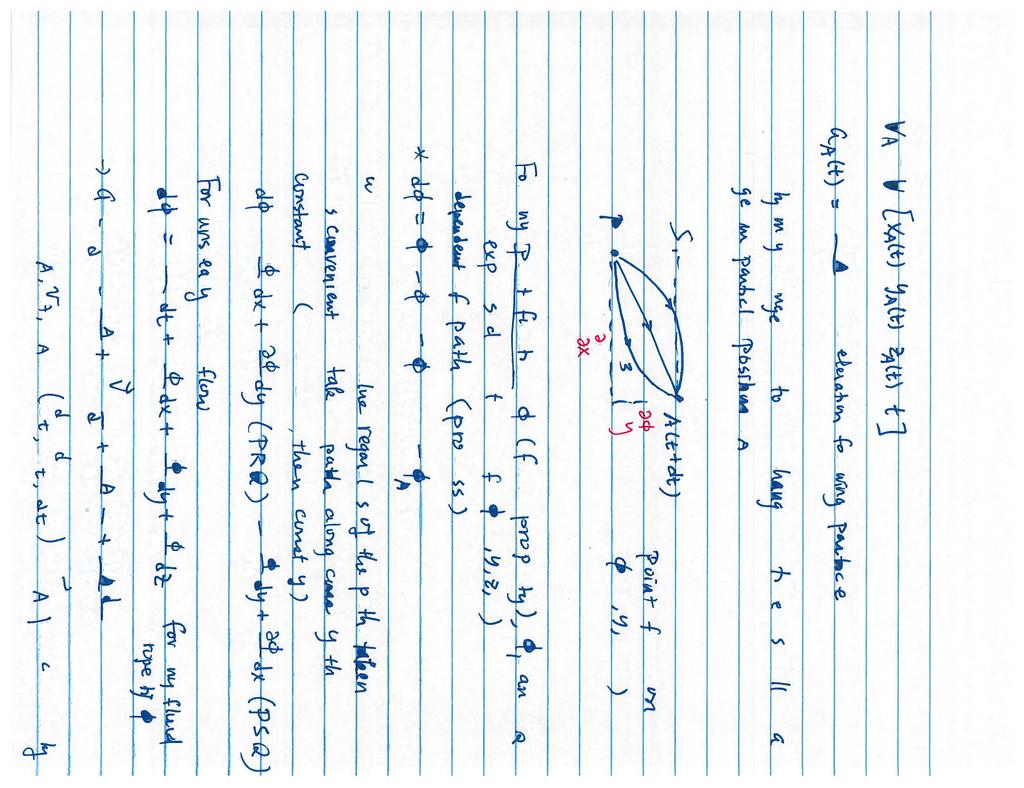
24 HC Chen //09 Conrol volume and Sysem Sysem a collecion of maer of fixed ideniy which may move, flow and inerac wih is surroundings Sysem may change is size and shape coninuously, bu always conains he same mass. The sysem may inerac wih is surroundings hrough hea ransfer, exerion of pressure, shear forces and elecromagneic forces, ec. Conrol Volume a volume in space a geomery eniy, independen of mass hrough which fluid may flow Typical Conrol Volumes he air in earh amosphere, he waer in a lake, he blood in your vein, he coolan in a refrigeraor, or a single fluid paricle Sysem Approach Sysem Approach Lagrangian approach All he conservaion laws conservaion of mass, momenum, angular momenum, energy, ec. can be applied direcly o he sysem. Free-body diagram and similar analyses can be used for a sysem which consiss of he same mass similar o fluid saics. u i is ofen very difficul o idenify and rack a specific fluid sysem in moion. Polluan in a river? Exhaus gas from an engine? The air affeced by an airplane? Reynolds Transpor Theorem


25 HC Chen //09 Conrol Volume Approach Conrol Volume Approach Eulerian approach Aerodynamic force around airplanes, auomobiles, buildings, ec. Hydrodynamic forces around ships, submarines, offshore srucures, ec. I is difficul and no necessary o employ sysem approach I is more convenien o use he conrol volume approach by idenifying a specific volume in space surrounding he airplane, ship, or oher objecs of ineres and analyze he fluid wihin, hrough, and around ha volume In general, conrol volume may be a moving, deformable volume alloon, pison in moion, airplane ake-off/landing,. d d SYS d 0 bu d d CV d 0 Reynolds Transpor Theorem
26 HC Chen //09 Fundamenal Laws Conservaion of geomery of moion and deformaion of maer - ranslaion, roaion, linear and angular deformaions fluid kinemaics Conservaion of Mass - Coninuiy equaion Conservaion of momenum - Newon s second law Conservaion of Angular Momenum Conservaion of Energy - Firs Law of Thermodynamics Enropy, Irreversible flow - Second Law of Thermodynamics Equaion of sae, sress/rae-of-srain relaions, Fourier law, and oher consiuive equaions Lagrangian Descripion Paricle approach Maerial volume, maerial surface, maerial curve Fluids in maerial volume sysem will move, disor, and change size and shape, bu always consiss of he same fluid paricles Pahline r r ro, p p ro, V V r, o ec. MV o pahlines MV Reynolds Transpor Theorem 3
27 HC Chen //09 Eulerian Descripion Field Approach Abandon he edious and ofen unnecessary ask of racking individual paricles Individual paricles are no labeled and no disinguished from one anoher Focuses aenion on wha happens a a fixed poin or volume as differen paricles goes by r, p p r, V V r, ec. CV Lagrangian vs. Eulerican Lagrangian Approach man-o-man, ag each individual paricle difficul o rack many paricles a a ime may be irrelevan o he problem of ineres Eulerian Approach zone defense, observe fluid paricles in a preseleced, ofen fixed, conrol volume always focus on regions of ineres easy o seup experimen or compuaional domain u he conservaion laws need o be derived from paricle approach!!! Reynolds Transpor Theorem 4

28 HC Chen //09 Lagrangian and Eulerian Descripions Largrangian D V D DV V V V D Unseady effec Eulerian Convecive effec Lagrangian vs. Eulerian Lagrangian Eulerian Reynolds Transpor Theorem 5
29 HC Chen //09 Mahemaical formulaion Differenial formulaion Inegral CV formulaion Provide all deails of he flow Obey fundamenal laws a every poin in he fluid domain Solve problems wih minimum inpu informaion boundary condiions Produce differenial equaions ha are ofen difficul o solve Expensive for complex flows May give more informaion han acually needed Does no reveal all flow deails Obey fundamenal laws in an average manner over conrol volume Require more inpu, such as velociy profiles and pressure disribuions a convenien boundaries Simpler mahemaics, inegral equaions for global quaniies Less compuaionally inensive Ofen canno give as much as needed, yield only approximae answers Reynolds Transpor Theorem Kinemaics of Moving Conrol Volume Conrol Mass * Largrangian - sysem approach Conrol Volume * Eulerian - field approach Reynolds ranspor heorem * Conversion from Lagrangian o Eulerian descripion Reynolds Transpor Theorem 6
30 HC Chen //09 Reynolds Transpor Theorem 7 Reynolds Transpor Theorem V =V V =V CVI II I Fixed conrol surface and sysem boundary a ime Sysem boundary a ime + SYS = CV = CVI + I SYS + = CV-I + II II I CV sys CV sys Conrol volume and Sysem Reynolds Transpor Theorem I II CV CV CV II I CV sys sys sys CV in ou CV I 0 II 0 CV CV 0 sys 0 II I b A V b A V bd A V b A b b A V b A b b lim lim lim lim CV SYS b A V b A V D D


31 HC Chen //09 Fixed Conrol Volume nˆ S I I V III nˆ ds S II nˆ II V MS+ MS, CV=CV+ Maerial Volume Sysem Maerial Surface Sysem boundary CS = MS = S I + S II MV = CV = I + III MV + = II + III CV + = CV Fixed CV Conrol Volume Analysis Ouflow, V nˆ 0 Inflow, V nˆ 0 Reynolds Transpor Theorem 8
32 HC Chen //09 D D d rd, rd, rv, nda ˆ d MV CV CS D rd r d rd D, lim,, 0 MV MV MV lim r, d rd, 0 MV MV lim rd, rd, 0 MV MV lim r, r, d 0 MV MV CV lim rd, rd, rd, rd, 0 II III I III D D d rd, rd, r, VndA ˆ d MV CV CS D d rd, rd, lim rd, rd, D d 0 MV CV II I d ˆ I Vd nda across SI d ˆ II Vd nda across SII D d rd, rd, r, VndA ˆ D d MV CV CS Rae of change of F in MV Rae of change of F in CV Convecive Transpor flux of F across CS Reynolds Transpor Theorem 9

33 HC Chen //09 Moving and Deforming Conrol Volume MV = CV nˆ V r nˆ W CV+ Moving Conrol Volume V V W CV V MV+ CV W V V CV : Absolue fluid velociy wih respec o a fixed coordinae sysem : absolue velociy of he conrol volume : relaive fluid velociy wih respec o a moving conrol volume Reynolds Transpor Theorem 0


34 HC Chen //09 D D d rd, rd, r, WndA ˆ d MV CV CS Lagrangian descripion following he sysem ; Eulerian descripion following conrol volume Le b hen d b d D D D sys MV CV CS MV d b d b d bw nda ˆ d d d f only; d d d D sys Largrangian d bd bwnda ˆ d CV Eulerian CS V W V CV Conrol Volume Analysis Reynolds Transpor Theorem
Real Time Integral-Based Structural Health Monitoring
 Real Time Inegral-Based Srucural Healh Monioring The nd Inernaional Conference on Sensing Technology ICST 7 J. G. Chase, I. Singh-Leve, C. E. Hann, X. Chen Deparmen of Mechanical Engineering, Universiy
Real Time Inegral-Based Srucural Healh Monioring The nd Inernaional Conference on Sensing Technology ICST 7 J. G. Chase, I. Singh-Leve, C. E. Hann, X. Chen Deparmen of Mechanical Engineering, Universiy
AML710 CAD LECTURE 11 SPACE CURVES. Space Curves Intrinsic properties Synthetic curves
 AML7 CAD LECTURE Space Curves Inrinsic properies Synheic curves A curve which may pass hrough any region of hreedimensional space, as conrased o a plane curve which mus lie on a single plane. Space curves
AML7 CAD LECTURE Space Curves Inrinsic properies Synheic curves A curve which may pass hrough any region of hreedimensional space, as conrased o a plane curve which mus lie on a single plane. Space curves
Why not experiment with the system itself? Ways to study a system System. Application areas. Different kinds of systems
 Simulaion Wha is simulaion? Simple synonym: imiaion We are ineresed in sudying a Insead of experimening wih he iself we experimen wih a model of he Experimen wih he Acual Ways o sudy a Sysem Experimen
Simulaion Wha is simulaion? Simple synonym: imiaion We are ineresed in sudying a Insead of experimening wih he iself we experimen wih a model of he Experimen wih he Acual Ways o sudy a Sysem Experimen
Motion along a Line. Describing Motion along a Line
 Moion along a Line Describing Moion: Displacemen Velociy Acceleraion Uniformly Acceleraed Moion Free Fall Describing Moion along a Line Wha is he posiion, elociy, and acceleraion of he blue do a each insan
Moion along a Line Describing Moion: Displacemen Velociy Acceleraion Uniformly Acceleraed Moion Free Fall Describing Moion along a Line Wha is he posiion, elociy, and acceleraion of he blue do a each insan
CENG 477 Introduction to Computer Graphics. Modeling Transformations
 CENG 477 Inroducion o Compuer Graphics Modeling Transformaions Modeling Transformaions Model coordinaes o World coordinaes: Model coordinaes: All shapes wih heir local coordinaes and sies. world World
CENG 477 Inroducion o Compuer Graphics Modeling Transformaions Modeling Transformaions Model coordinaes o World coordinaes: Model coordinaes: All shapes wih heir local coordinaes and sies. world World
THERMAL PHYSICS COMPUTER LAB #3 : Stability of Dry Air and Brunt-Vaisala Oscillations
 THERMAL PHYSICS COMPUTER LAB #3 : Sabiliy of Dry Air and Brun-Vaisala Oscillaions Consider a parcel of dry air of volume V, emperaure T and densiy ρ. I displace he same volume V of surrounding air of emperaure
THERMAL PHYSICS COMPUTER LAB #3 : Sabiliy of Dry Air and Brun-Vaisala Oscillaions Consider a parcel of dry air of volume V, emperaure T and densiy ρ. I displace he same volume V of surrounding air of emperaure
Quantitative macro models feature an infinite number of periods A more realistic (?) view of time
 view of time") INFINIE-HORIZON CONSUMPION-SAVINGS MODEL SEPEMBER, Inroducion BASICS Quaniaive macro models feaure an infinie number of periods A more realisic (?) view of ime Infinie number of periods A meaphor for many
INFINIE-HORIZON CONSUMPION-SAVINGS MODEL SEPEMBER, Inroducion BASICS Quaniaive macro models feaure an infinie number of periods A more realisic (?) view of ime Infinie number of periods A meaphor for many
NEWTON S SECOND LAW OF MOTION
 Course and Secion Dae Names NEWTON S SECOND LAW OF MOTION The acceleraion of an objec is defined as he rae of change of elociy. If he elociy changes by an amoun in a ime, hen he aerage acceleraion during
Course and Secion Dae Names NEWTON S SECOND LAW OF MOTION The acceleraion of an objec is defined as he rae of change of elociy. If he elociy changes by an amoun in a ime, hen he aerage acceleraion during
IDEF3 Process Description Capture Method
 IDEF3 Process Descripion Capure Mehod IDEF3 is par of he IDEF family of mehods developmen funded by he US Air Force o provide modelling suppor for sysems engineering and enerprise inegraion 2 IDEF3 Mehod
IDEF3 Process Descripion Capure Mehod IDEF3 is par of he IDEF family of mehods developmen funded by he US Air Force o provide modelling suppor for sysems engineering and enerprise inegraion 2 IDEF3 Mehod
Spline Curves. Color Interpolation. Normal Interpolation. Last Time? Today. glshademodel (GL_SMOOTH); Adjacency Data Structures. Mesh Simplification
; Adjacency Data Structures. Mesh Simplification") Las Time? Adjacency Daa Srucures Spline Curves Geomeric & opologic informaion Dynamic allocaion Efficiency of access Mesh Simplificaion edge collapse/verex spli geomorphs progressive ransmission view-dependen
Las Time? Adjacency Daa Srucures Spline Curves Geomeric & opologic informaion Dynamic allocaion Efficiency of access Mesh Simplificaion edge collapse/verex spli geomorphs progressive ransmission view-dependen
Curves & Surfaces. Last Time? Today. Readings for Today (pick one) Limitations of Polygonal Meshes. Today. Adjacency Data Structures
 Limitations of Polygonal Meshes. Today. Adjacency Data Structures") Las Time? Adjacency Daa Srucures Geomeric & opologic informaion Dynamic allocaion Efficiency of access Curves & Surfaces Mesh Simplificaion edge collapse/verex spli geomorphs progressive ransmission view-dependen
Las Time? Adjacency Daa Srucures Geomeric & opologic informaion Dynamic allocaion Efficiency of access Curves & Surfaces Mesh Simplificaion edge collapse/verex spli geomorphs progressive ransmission view-dependen
Schedule. Curves & Surfaces. Questions? Last Time: Today. Limitations of Polygonal Meshes. Acceleration Data Structures.
 Schedule Curves & Surfaces Sunday Ocober 5 h, * 3-5 PM *, Room TBA: Review Session for Quiz 1 Exra Office Hours on Monday (NE43 Graphics Lab) Tuesday Ocober 7 h : Quiz 1: In class 1 hand-wrien 8.5x11 shee
Schedule Curves & Surfaces Sunday Ocober 5 h, * 3-5 PM *, Room TBA: Review Session for Quiz 1 Exra Office Hours on Monday (NE43 Graphics Lab) Tuesday Ocober 7 h : Quiz 1: In class 1 hand-wrien 8.5x11 shee
Sam knows that his MP3 player has 40% of its battery life left and that the battery charges by an additional 12 percentage points every 15 minutes.
 8.F Baery Charging Task Sam wans o ake his MP3 player and his video game player on a car rip. An hour before hey plan o leave, he realized ha he forgo o charge he baeries las nigh. A ha poin, he plugged
8.F Baery Charging Task Sam wans o ake his MP3 player and his video game player on a car rip. An hour before hey plan o leave, he realized ha he forgo o charge he baeries las nigh. A ha poin, he plugged
EP2200 Queueing theory and teletraffic systems
 EP2200 Queueing heory and eleraffic sysems Vikoria Fodor Laboraory of Communicaion Neworks School of Elecrical Engineering Lecure 1 If you wan o model neworks Or a comple daa flow A queue's he key o help
EP2200 Queueing heory and eleraffic sysems Vikoria Fodor Laboraory of Communicaion Neworks School of Elecrical Engineering Lecure 1 If you wan o model neworks Or a comple daa flow A queue's he key o help
Dipartimento di Elettronica Informazione e Bioingegneria Robotics
 Diparimeno di Eleronica Informazione e Bioingegneria Roboics Mobiliy: wheels and whegs @ 2015 Wheeled Mobile robos (WMR) A robo capable of locomoion on a surface solely hrough he acuaion of wheel assemblies
Diparimeno di Eleronica Informazione e Bioingegneria Roboics Mobiliy: wheels and whegs @ 2015 Wheeled Mobile robos (WMR) A robo capable of locomoion on a surface solely hrough he acuaion of wheel assemblies
Last Time: Curves & Surfaces. Today. Questions? Limitations of Polygonal Meshes. Can We Disguise the Facets?
 Las Time: Curves & Surfaces Expeced value and variance Mone-Carlo in graphics Imporance sampling Sraified sampling Pah Tracing Irradiance Cache Phoon Mapping Quesions? Today Moivaion Limiaions of Polygonal
Las Time: Curves & Surfaces Expeced value and variance Mone-Carlo in graphics Imporance sampling Sraified sampling Pah Tracing Irradiance Cache Phoon Mapping Quesions? Today Moivaion Limiaions of Polygonal
Visual Perception as Bayesian Inference. David J Fleet. University of Toronto
 Visual Percepion as Bayesian Inference David J Flee Universiy of Torono Basic rules of probabiliy sum rule (for muually exclusive a ): produc rule (condiioning): independence (def n ): Bayes rule: marginalizaion:
Visual Percepion as Bayesian Inference David J Flee Universiy of Torono Basic rules of probabiliy sum rule (for muually exclusive a ): produc rule (condiioning): independence (def n ): Bayes rule: marginalizaion:
STEREO PLANE MATCHING TECHNIQUE
 STEREO PLANE MATCHING TECHNIQUE Commission III KEY WORDS: Sereo Maching, Surface Modeling, Projecive Transformaion, Homography ABSTRACT: This paper presens a new ype of sereo maching algorihm called Sereo
STEREO PLANE MATCHING TECHNIQUE Commission III KEY WORDS: Sereo Maching, Surface Modeling, Projecive Transformaion, Homography ABSTRACT: This paper presens a new ype of sereo maching algorihm called Sereo
Chapter Six Chapter Six
 Chaper Si Chaper Si 0 CHAPTER SIX ConcepTess and Answers and Commens for Secion.. Which of he following graphs (a) (d) could represen an aniderivaive of he funcion shown in Figure.? Figure. (a) (b) (c)
Chaper Si Chaper Si 0 CHAPTER SIX ConcepTess and Answers and Commens for Secion.. Which of he following graphs (a) (d) could represen an aniderivaive of he funcion shown in Figure.? Figure. (a) (b) (c)
Digital Geometry Processing Differential Geometry
 Digial Geomery Processing Differenial Geomery Moivaion Undersand he srucure of he surface Differenial Geomery Properies: smoohness, curviness, imporan direcions How o modify he surface o change hese properies
Digial Geomery Processing Differenial Geomery Moivaion Undersand he srucure of he surface Differenial Geomery Properies: smoohness, curviness, imporan direcions How o modify he surface o change hese properies
CAMERA CALIBRATION BY REGISTRATION STEREO RECONSTRUCTION TO 3D MODEL
 CAMERA CALIBRATION BY REGISTRATION STEREO RECONSTRUCTION TO 3D MODEL Klečka Jan Docoral Degree Programme (1), FEEC BUT E-mail: xkleck01@sud.feec.vubr.cz Supervised by: Horák Karel E-mail: horak@feec.vubr.cz
CAMERA CALIBRATION BY REGISTRATION STEREO RECONSTRUCTION TO 3D MODEL Klečka Jan Docoral Degree Programme (1), FEEC BUT E-mail: xkleck01@sud.feec.vubr.cz Supervised by: Horák Karel E-mail: horak@feec.vubr.cz
the marginal product. Using the rule for differentiating a power function,
 3 Augu 07 Chaper 3 Derivaive ha economi ue 3 Rule for differeniaion The chain rule Economi ofen work wih funcion of variable ha are hemelve funcion of oher variable For example, conider a monopoly elling
3 Augu 07 Chaper 3 Derivaive ha economi ue 3 Rule for differeniaion The chain rule Economi ofen work wih funcion of variable ha are hemelve funcion of oher variable For example, conider a monopoly elling
Scattering at an Interface: Normal Incidence
 Course Insrucor Dr. Raymond C. Rumpf Office: A 337 Phone: (915) 747 6958 Mail: rcrumpf@uep.edu 4347 Applied lecromagneics Topic 3f Scaering a an Inerface: Normal Incidence Scaering These Normal noes Incidence
Course Insrucor Dr. Raymond C. Rumpf Office: A 337 Phone: (915) 747 6958 Mail: rcrumpf@uep.edu 4347 Applied lecromagneics Topic 3f Scaering a an Inerface: Normal Incidence Scaering These Normal noes Incidence
Gauss-Jordan Algorithm
 Gauss-Jordan Algorihm The Gauss-Jordan algorihm is a sep by sep procedure for solving a sysem of linear equaions which may conain any number of variables and any number of equaions. The algorihm is carried
Gauss-Jordan Algorihm The Gauss-Jordan algorihm is a sep by sep procedure for solving a sysem of linear equaions which may conain any number of variables and any number of equaions. The algorihm is carried
Today. Curves & Surfaces. Can We Disguise the Facets? Limitations of Polygonal Meshes. Better, but not always good enough
 Today Curves & Surfaces Moivaion Limiaions of Polygonal Models Some Modeling Tools & Definiions Curves Surfaces / Paches Subdivision Surfaces Limiaions of Polygonal Meshes Can We Disguise he Faces? Planar
Today Curves & Surfaces Moivaion Limiaions of Polygonal Models Some Modeling Tools & Definiions Curves Surfaces / Paches Subdivision Surfaces Limiaions of Polygonal Meshes Can We Disguise he Faces? Planar
FIELD PROGRAMMABLE GATE ARRAY (FPGA) AS A NEW APPROACH TO IMPLEMENT THE CHAOTIC GENERATORS
 AS A NEW APPROACH TO IMPLEMENT THE CHAOTIC GENERATORS") FIELD PROGRAMMABLE GATE ARRAY (FPGA) AS A NEW APPROACH TO IMPLEMENT THE CHAOTIC GENERATORS Mohammed A. Aseeri and M. I. Sobhy Deparmen of Elecronics, The Universiy of Ken a Canerbury Canerbury, Ken, CT2
FIELD PROGRAMMABLE GATE ARRAY (FPGA) AS A NEW APPROACH TO IMPLEMENT THE CHAOTIC GENERATORS Mohammed A. Aseeri and M. I. Sobhy Deparmen of Elecronics, The Universiy of Ken a Canerbury Canerbury, Ken, CT2
Engineering Mathematics 2018
 Engineering Mahemaics 08 SUBJET NAME : Mahemaics II SUBJET ODE : MA65 MATERIAL NAME : Par A quesions REGULATION : R03 UPDATED ON : November 06 TEXTBOOK FOR REFERENE To buy he book visi : Sri Hariganesh
Engineering Mahemaics 08 SUBJET NAME : Mahemaics II SUBJET ODE : MA65 MATERIAL NAME : Par A quesions REGULATION : R03 UPDATED ON : November 06 TEXTBOOK FOR REFERENE To buy he book visi : Sri Hariganesh
4.1 3D GEOMETRIC TRANSFORMATIONS
 MODULE IV MCA - 3 COMPUTER GRAPHICS ADMN 29- Dep. of Compuer Science And Applicaions, SJCET, Palai 94 4. 3D GEOMETRIC TRANSFORMATIONS Mehods for geomeric ransformaions and objec modeling in hree dimensions
MODULE IV MCA - 3 COMPUTER GRAPHICS ADMN 29- Dep. of Compuer Science And Applicaions, SJCET, Palai 94 4. 3D GEOMETRIC TRANSFORMATIONS Mehods for geomeric ransformaions and objec modeling in hree dimensions
MARSS Reference Sheet
 MARSS Reference Shee The defaul MARSS model (form="marxss") is wrien as follows: x = B x 1 + u + C c + w where w MVN( Q ) y = Z x + a + D d + v where v MVN( R ) x 1 MVN(π Λ) or x MVN(π Λ) c and d are inpus
MARSS Reference Shee The defaul MARSS model (form="marxss") is wrien as follows: x = B x 1 + u + C c + w where w MVN( Q ) y = Z x + a + D d + v where v MVN( R ) x 1 MVN(π Λ) or x MVN(π Λ) c and d are inpus
Optics and Light. Presentation
 Opics and Ligh Presenaion Opics and Ligh Wha comes o mind when you hear he words opics and ligh? Wha is an opical illusion? Opical illusions can use color, ligh and paerns o creae images ha can be
Opics and Ligh Presenaion Opics and Ligh Wha comes o mind when you hear he words opics and ligh? Wha is an opical illusion? Opical illusions can use color, ligh and paerns o creae images ha can be
Tracking Appearances with Occlusions
 Tracking ppearances wih Occlusions Ying Wu, Ting Yu, Gang Hua Deparmen of Elecrical & Compuer Engineering Norhwesern Universiy 2145 Sheridan oad, Evanson, IL 60208 {yingwu,ingyu,ganghua}@ece.nwu.edu bsrac
Tracking ppearances wih Occlusions Ying Wu, Ting Yu, Gang Hua Deparmen of Elecrical & Compuer Engineering Norhwesern Universiy 2145 Sheridan oad, Evanson, IL 60208 {yingwu,ingyu,ganghua}@ece.nwu.edu bsrac
Hermite Curves. Jim Armstrong Singularity November 2005
 TechNoe TN-5- Herie Curves Ji Arsrong Singulariy Noveer 5 This is he second in a series of TechNoes on he sujec of applied curve aheaics in Adoe Flash TM. Each TechNoe provides a aheaical foundaion for
TechNoe TN-5- Herie Curves Ji Arsrong Singulariy Noveer 5 This is he second in a series of TechNoes on he sujec of applied curve aheaics in Adoe Flash TM. Each TechNoe provides a aheaical foundaion for
STRING DESCRIPTIONS OF DATA FOR DISPLAY*
 SLAC-PUB-383 January 1968 STRING DESCRIPTIONS OF DATA FOR DISPLAY* J. E. George and W. F. Miller Compuer Science Deparmen and Sanford Linear Acceleraor Cener Sanford Universiy Sanford, California Absrac
SLAC-PUB-383 January 1968 STRING DESCRIPTIONS OF DATA FOR DISPLAY* J. E. George and W. F. Miller Compuer Science Deparmen and Sanford Linear Acceleraor Cener Sanford Universiy Sanford, California Absrac
1.4 Application Separable Equations and the Logistic Equation
 1.4 Applicaion Separable Equaions and he Logisic Equaion If a separable differenial equaion is wrien in he form f ( y) dy= g( x) dx, hen is general soluion can be wrien in he form f ( y ) dy = g ( x )
1.4 Applicaion Separable Equaions and he Logisic Equaion If a separable differenial equaion is wrien in he form f ( y) dy= g( x) dx, hen is general soluion can be wrien in he form f ( y ) dy = g ( x )
Introduction to Data-Driven Animation: Programming with Motion Capture Jehee Lee
 Inroducion o Daa-Driven Animaion: Programming wih Moion Caure Jehee Lee Seoul Naional Universiy Daa-Driven Animaion wih Moion Caure Programming wih Moion Caure Why is i difficul? Encomass a lo of heerogeneous
Inroducion o Daa-Driven Animaion: Programming wih Moion Caure Jehee Lee Seoul Naional Universiy Daa-Driven Animaion wih Moion Caure Programming wih Moion Caure Why is i difficul? Encomass a lo of heerogeneous
A Framework for Applying Point Clouds Grabbed by Multi-Beam LIDAR in Perceiving the Driving Environment
 Sensors 215, 15, 21931-21956; doi:1.339/s15921931 Aricle OPEN ACCESS sensors ISSN 1424-822 www.mdpi.com/journal/sensors A Framewor for Applying Poin Clouds Grabbed by Muli-Beam LIDAR in Perceiving he Driving
Sensors 215, 15, 21931-21956; doi:1.339/s15921931 Aricle OPEN ACCESS sensors ISSN 1424-822 www.mdpi.com/journal/sensors A Framewor for Applying Poin Clouds Grabbed by Muli-Beam LIDAR in Perceiving he Driving
EECS 487: Interactive Computer Graphics
 EECS 487: Ineracive Compuer Graphics Lecure 7: B-splines curves Raional Bézier and NURBS Cubic Splines A represenaion of cubic spline consiss of: four conrol poins (why four?) hese are compleely user specified
EECS 487: Ineracive Compuer Graphics Lecure 7: B-splines curves Raional Bézier and NURBS Cubic Splines A represenaion of cubic spline consiss of: four conrol poins (why four?) hese are compleely user specified
A Matching Algorithm for Content-Based Image Retrieval
 A Maching Algorihm for Conen-Based Image Rerieval Sue J. Cho Deparmen of Compuer Science Seoul Naional Universiy Seoul, Korea Absrac Conen-based image rerieval sysem rerieves an image from a daabase using
A Maching Algorihm for Conen-Based Image Rerieval Sue J. Cho Deparmen of Compuer Science Seoul Naional Universiy Seoul, Korea Absrac Conen-based image rerieval sysem rerieves an image from a daabase using
Effects needed for Realism. Ray Tracing. Ray Tracing: History. Outline. Foundations of Computer Graphics (Fall 2012)
") Foundaions of ompuer Graphics (Fall 2012) S 184, Lecure 16: Ray Tracing hp://ins.eecs.berkeley.edu/~cs184 Effecs needed for Realism (Sof) Shadows Reflecions (Mirrors and Glossy) Transparency (Waer, Glass)
Foundaions of ompuer Graphics (Fall 2012) S 184, Lecure 16: Ray Tracing hp://ins.eecs.berkeley.edu/~cs184 Effecs needed for Realism (Sof) Shadows Reflecions (Mirrors and Glossy) Transparency (Waer, Glass)
A Numerical Study on Impact Damage Assessment of PC Box Girder Bridge by Pounding Effect
 A Numerical Sudy on Impac Damage Assessmen of PC Box Girder Bridge by Pounding Effec H. Tamai, Y. Sonoda, K. Goou and Y.Kajia Kyushu Universiy, Japan Absrac When a large earhquake occurs, displacemen response
A Numerical Sudy on Impac Damage Assessmen of PC Box Girder Bridge by Pounding Effec H. Tamai, Y. Sonoda, K. Goou and Y.Kajia Kyushu Universiy, Japan Absrac When a large earhquake occurs, displacemen response
A Principled Approach to. MILP Modeling. Columbia University, August Carnegie Mellon University. Workshop on MIP. John Hooker.
 Slide A Principled Approach o MILP Modeling John Hooer Carnegie Mellon Universiy Worshop on MIP Columbia Universiy, Augus 008 Proposal MILP modeling is an ar, bu i need no be unprincipled. Slide Proposal
Slide A Principled Approach o MILP Modeling John Hooer Carnegie Mellon Universiy Worshop on MIP Columbia Universiy, Augus 008 Proposal MILP modeling is an ar, bu i need no be unprincipled. Slide Proposal
MOTION DETECTORS GRAPH MATCHING LAB PRE-LAB QUESTIONS
 NME: TE: LOK: MOTION ETETORS GRPH MTHING L PRE-L QUESTIONS 1. Read he insrucions, and answer he following quesions. Make sure you resae he quesion so I don hae o read he quesion o undersand he answer..
NME: TE: LOK: MOTION ETETORS GRPH MTHING L PRE-L QUESTIONS 1. Read he insrucions, and answer he following quesions. Make sure you resae he quesion so I don hae o read he quesion o undersand he answer..
Mass-Spring Systems and Resonance
 Mass-Spring Sysems and Resonance Comparing he effecs of damping coefficiens An ineresing problem is o compare he he effec of differen values of he damping coefficien c on he resuling moion of he mass on
Mass-Spring Sysems and Resonance Comparing he effecs of damping coefficiens An ineresing problem is o compare he he effec of differen values of he damping coefficien c on he resuling moion of he mass on
Image Content Representation
 Image Conen Represenaion Represenaion for curves and shapes regions relaionships beween regions E.G.M. Perakis Image Represenaion & Recogniion 1 Reliable Represenaion Uniqueness: mus uniquely specify an
Image Conen Represenaion Represenaion for curves and shapes regions relaionships beween regions E.G.M. Perakis Image Represenaion & Recogniion 1 Reliable Represenaion Uniqueness: mus uniquely specify an
PART 1 REFERENCE INFORMATION CONTROL DATA 6400 SYSTEMS CENTRAL PROCESSOR MONITOR
 . ~ PART 1 c 0 \,).,,.,, REFERENCE NFORMATON CONTROL DATA 6400 SYSTEMS CENTRAL PROCESSOR MONTOR n CONTROL DATA 6400 Compuer Sysems, sysem funcions are normally handled by he Monior locaed in a Peripheral
. ~ PART 1 c 0 \,).,,.,, REFERENCE NFORMATON CONTROL DATA 6400 SYSTEMS CENTRAL PROCESSOR MONTOR n CONTROL DATA 6400 Compuer Sysems, sysem funcions are normally handled by he Monior locaed in a Peripheral
Scheduling. Scheduling. EDA421/DIT171 - Parallel and Distributed Real-Time Systems, Chalmers/GU, 2011/2012 Lecture #4 Updated March 16, 2012
 EDA421/DIT171 - Parallel and Disribued Real-Time Sysems, Chalmers/GU, 2011/2012 Lecure #4 Updaed March 16, 2012 Aemps o mee applicaion consrains should be done in a proacive way hrough scheduling. Schedule
EDA421/DIT171 - Parallel and Disribued Real-Time Sysems, Chalmers/GU, 2011/2012 Lecure #4 Updaed March 16, 2012 Aemps o mee applicaion consrains should be done in a proacive way hrough scheduling. Schedule
Project #1 Math 285 Name:
 Projec #1 Mah 85 Name: Solving Orinary Differenial Equaions by Maple: Sep 1: Iniialize he program: wih(deools): wih(pdeools): Sep : Define an ODE: (There are several ways of efining equaions, we sar wih
Projec #1 Mah 85 Name: Solving Orinary Differenial Equaions by Maple: Sep 1: Iniialize he program: wih(deools): wih(pdeools): Sep : Define an ODE: (There are several ways of efining equaions, we sar wih
COSC 3213: Computer Networks I Chapter 6 Handout # 7
 COSC 3213: Compuer Neworks I Chaper 6 Handou # 7 Insrucor: Dr. Marvin Mandelbaum Deparmen of Compuer Science York Universiy F05 Secion A Medium Access Conrol (MAC) Topics: 1. Muliple Access Communicaions:
COSC 3213: Compuer Neworks I Chaper 6 Handou # 7 Insrucor: Dr. Marvin Mandelbaum Deparmen of Compuer Science York Universiy F05 Secion A Medium Access Conrol (MAC) Topics: 1. Muliple Access Communicaions:
Definition and examples of time series
 Definiion and examples of ime series A ime series is a sequence of daa poins being recorded a specific imes. Formally, le,,p be a probabiliy space, and T an index se. A real valued sochasic process is
Definiion and examples of ime series A ime series is a sequence of daa poins being recorded a specific imes. Formally, le,,p be a probabiliy space, and T an index se. A real valued sochasic process is
Wiley Plus. Assignment 1 is online:
 Wile Plus Assignmen 1 is online: 6 problems from chapers and 3 1D and D Kinemaics Due Monda Ocober 5 Before 11 pm! Chaper II: Kinemaics In One Dimension Displacemen Speed and Veloci Acceleraion Equaions
Wile Plus Assignmen 1 is online: 6 problems from chapers and 3 1D and D Kinemaics Due Monda Ocober 5 Before 11 pm! Chaper II: Kinemaics In One Dimension Displacemen Speed and Veloci Acceleraion Equaions
Characterization of Impact Damage in Composite Plates
 Characerizaion of Impac Damage in Composie Plaes Aji Mal and Sauvik Banerjee Mechanical & Aerospace Engineering Deparmen Universiy of California Los Angeles Frank Shih Mechanical Engineering Deparmen Seale
Characerizaion of Impac Damage in Composie Plaes Aji Mal and Sauvik Banerjee Mechanical & Aerospace Engineering Deparmen Universiy of California Los Angeles Frank Shih Mechanical Engineering Deparmen Seale
Comparison of implicit, explicit, center and upwind schemes for the simulation of internal vortex flow at low Mach number
 Inro Numeric Inviscid Viscous Comp. 3D Conclusion Comparison of implici, explici, cener and upwind schemes for he simulaion of inernal vorex flow a low Mach number Marc Buffa Anne Cadiou 2 Lionel Le Penven
Inro Numeric Inviscid Viscous Comp. 3D Conclusion Comparison of implici, explici, cener and upwind schemes for he simulaion of inernal vorex flow a low Mach number Marc Buffa Anne Cadiou 2 Lionel Le Penven
Nonparametric CUSUM Charts for Process Variability
 Journal of Academia and Indusrial Research (JAIR) Volume 3, Issue June 4 53 REEARCH ARTICLE IN: 78-53 Nonparameric CUUM Chars for Process Variabiliy D.M. Zombade and V.B. Ghue * Dep. of aisics, Walchand
Journal of Academia and Indusrial Research (JAIR) Volume 3, Issue June 4 53 REEARCH ARTICLE IN: 78-53 Nonparameric CUUM Chars for Process Variabiliy D.M. Zombade and V.B. Ghue * Dep. of aisics, Walchand
Improving Occupancy Grid FastSLAM by Integrating Navigation Sensors
 Improving Occupancy Grid FasSLAM by Inegraing Navigaion Sensors Chrisopher Weyers Sensors Direcorae Air Force Research Laboraory Wrigh-Paerson AFB, OH 45433 Gilber Peerson Deparmen of Elecrical and Compuer
Improving Occupancy Grid FasSLAM by Inegraing Navigaion Sensors Chrisopher Weyers Sensors Direcorae Air Force Research Laboraory Wrigh-Paerson AFB, OH 45433 Gilber Peerson Deparmen of Elecrical and Compuer
Design Alternatives for a Thin Lens Spatial Integrator Array
 Egyp. J. Solids, Vol. (7), No. (), (004) 75 Design Alernaives for a Thin Lens Spaial Inegraor Array Hala Kamal *, Daniel V azquez and Javier Alda and E. Bernabeu Opics Deparmen. Universiy Compluense of
Egyp. J. Solids, Vol. (7), No. (), (004) 75 Design Alernaives for a Thin Lens Spaial Inegraor Array Hala Kamal *, Daniel V azquez and Javier Alda and E. Bernabeu Opics Deparmen. Universiy Compluense of
Y. Tsiatouhas. VLSI Systems and Computer Architecture Lab
 CMOS INEGRAED CIRCUI DESIGN ECHNIQUES Universiy of Ioannina Clocking Schemes Dep. of Compuer Science and Engineering Y. siaouhas CMOS Inegraed Circui Design echniques Overview 1. Jier Skew hroughpu Laency
CMOS INEGRAED CIRCUI DESIGN ECHNIQUES Universiy of Ioannina Clocking Schemes Dep. of Compuer Science and Engineering Y. siaouhas CMOS Inegraed Circui Design echniques Overview 1. Jier Skew hroughpu Laency
LOW-VELOCITY IMPACT LOCALIZATION OF THE COMPOSITE TUBE USING A NORMALIZED CROSS-CORRELATION METHOD
 21 s Inernaional Conference on Composie Maerials Xi an, 20-25 h Augus 2017 LOW-VELOCITY IMPACT LOCALIZATION OF THE COMPOSITE TUBE USING A NORMALIZED CROSS-CORRELATION METHOD Hyunseok Kwon 1, Yurim Park
21 s Inernaional Conference on Composie Maerials Xi an, 20-25 h Augus 2017 LOW-VELOCITY IMPACT LOCALIZATION OF THE COMPOSITE TUBE USING A NORMALIZED CROSS-CORRELATION METHOD Hyunseok Kwon 1, Yurim Park
Rao-Blackwellized Particle Filtering for Probing-Based 6-DOF Localization in Robotic Assembly
 MITSUBISHI ELECTRIC RESEARCH LABORATORIES hp://www.merl.com Rao-Blackwellized Paricle Filering for Probing-Based 6-DOF Localizaion in Roboic Assembly Yuichi Taguchi, Tim Marks, Haruhisa Okuda TR1-8 June
MITSUBISHI ELECTRIC RESEARCH LABORATORIES hp://www.merl.com Rao-Blackwellized Paricle Filering for Probing-Based 6-DOF Localizaion in Roboic Assembly Yuichi Taguchi, Tim Marks, Haruhisa Okuda TR1-8 June
An Iterative Scheme for Motion-Based Scene Segmentation
 An Ieraive Scheme for Moion-Based Scene Segmenaion Alexander Bachmann and Hildegard Kuehne Deparmen for Measuremen and Conrol Insiue for Anhropomaics Universiy of Karlsruhe (H), 76 131 Karlsruhe, Germany
An Ieraive Scheme for Moion-Based Scene Segmenaion Alexander Bachmann and Hildegard Kuehne Deparmen for Measuremen and Conrol Insiue for Anhropomaics Universiy of Karlsruhe (H), 76 131 Karlsruhe, Germany
MIC2569. Features. General Description. Applications. Typical Application. CableCARD Power Switch
 CableCARD Power Swich General Descripion is designed o supply power o OpenCable sysems and CableCARD hoss. These CableCARDs are also known as Poin of Disribuion (POD) cards. suppors boh Single and Muliple
CableCARD Power Swich General Descripion is designed o supply power o OpenCable sysems and CableCARD hoss. These CableCARDs are also known as Poin of Disribuion (POD) cards. suppors boh Single and Muliple
RGBD Data Based Pose Estimation: Why Sensor Fusion?
 18h Inernaional Conference on Informaion Fusion Washingon, DC - July 6-9, 2015 RGBD Daa Based Pose Esimaion: Why Sensor Fusion? O. Serdar Gedik Deparmen of Compuer Engineering, Yildirim Beyazi Universiy,
18h Inernaional Conference on Informaion Fusion Washingon, DC - July 6-9, 2015 RGBD Daa Based Pose Esimaion: Why Sensor Fusion? O. Serdar Gedik Deparmen of Compuer Engineering, Yildirim Beyazi Universiy,
A METHOD OF MODELING DEFORMATION OF AN OBJECT EMPLOYING SURROUNDING VIDEO CAMERAS
 A METHOD OF MODELING DEFORMATION OF AN OBJECT EMLOYING SURROUNDING IDEO CAMERAS Joo Kooi TAN, Seiji ISHIKAWA Deparmen of Mechanical and Conrol Engineering Kushu Insiue of Technolog, Japan ehelan@is.cnl.kuech.ac.jp,
A METHOD OF MODELING DEFORMATION OF AN OBJECT EMLOYING SURROUNDING IDEO CAMERAS Joo Kooi TAN, Seiji ISHIKAWA Deparmen of Mechanical and Conrol Engineering Kushu Insiue of Technolog, Japan ehelan@is.cnl.kuech.ac.jp,
A Fast Stereo-Based Multi-Person Tracking using an Approximated Likelihood Map for Overlapping Silhouette Templates
 A Fas Sereo-Based Muli-Person Tracking using an Approximaed Likelihood Map for Overlapping Silhouee Templaes Junji Saake Jun Miura Deparmen of Compuer Science and Engineering Toyohashi Universiy of Technology
A Fas Sereo-Based Muli-Person Tracking using an Approximaed Likelihood Map for Overlapping Silhouee Templaes Junji Saake Jun Miura Deparmen of Compuer Science and Engineering Toyohashi Universiy of Technology
Real time 3D face and facial feature tracking
 J Real-Time Image Proc (2007) 2:35 44 DOI 10.1007/s11554-007-0032-2 ORIGINAL RESEARCH PAPER Real ime 3D face and facial feaure racking Fadi Dornaika Æ Javier Orozco Received: 23 November 2006 / Acceped:
J Real-Time Image Proc (2007) 2:35 44 DOI 10.1007/s11554-007-0032-2 ORIGINAL RESEARCH PAPER Real ime 3D face and facial feaure racking Fadi Dornaika Æ Javier Orozco Received: 23 November 2006 / Acceped:
Handling uncertainty in semantic information retrieval process
 Handling uncerainy in semanic informaion rerieval process Chkiwa Mounira 1, Jedidi Anis 1 and Faiez Gargouri 1 1 Mulimedia, InfoRmaion sysems and Advanced Compuing Laboraory Sfax Universiy, Tunisia m.chkiwa@gmail.com,
Handling uncerainy in semanic informaion rerieval process Chkiwa Mounira 1, Jedidi Anis 1 and Faiez Gargouri 1 1 Mulimedia, InfoRmaion sysems and Advanced Compuing Laboraory Sfax Universiy, Tunisia m.chkiwa@gmail.com,
A Review of a Four-Channel Clamp-On Ultrasonic Flowmeter
 A view of a Four-Channel Clamp-On Ulrasonic Flowmeer Bernhard Funck & Peer Lipro Flexim GmbH, Berlin Page 1 March 2014 Muli-Channel clamp-on ulrasonic measuremen Inroducion Flow profile influences Compensaion
A view of a Four-Channel Clamp-On Ulrasonic Flowmeer Bernhard Funck & Peer Lipro Flexim GmbH, Berlin Page 1 March 2014 Muli-Channel clamp-on ulrasonic measuremen Inroducion Flow profile influences Compensaion
4. Minimax and planning problems
 CS/ECE/ISyE 524 Inroducion o Opimizaion Spring 2017 18 4. Minima and planning problems ˆ Opimizing piecewise linear funcions ˆ Minima problems ˆ Eample: Chebyshev cener ˆ Muli-period planning problems
CS/ECE/ISyE 524 Inroducion o Opimizaion Spring 2017 18 4. Minima and planning problems ˆ Opimizing piecewise linear funcions ˆ Minima problems ˆ Eample: Chebyshev cener ˆ Muli-period planning problems
Improving Ranking of Search Engines Results Based on Power Links
 IPASJ Inernaional Journal of Informaion Technology (IIJIT) Web Sie: hp://www.ipasj.org/iijit/iijit.hm A Publisher for Research Moivaion... Email: edioriiji@ipasj.org Volume 2, Issue 9, Sepember 2014 ISSN
IPASJ Inernaional Journal of Informaion Technology (IIJIT) Web Sie: hp://www.ipasj.org/iijit/iijit.hm A Publisher for Research Moivaion... Email: edioriiji@ipasj.org Volume 2, Issue 9, Sepember 2014 ISSN
Video-Based Face Recognition Using Probabilistic Appearance Manifolds
 Video-Based Face Recogniion Using Probabilisic Appearance Manifolds Kuang-Chih Lee Jeffrey Ho Ming-Hsuan Yang David Kriegman klee10@uiuc.edu jho@cs.ucsd.edu myang@honda-ri.com kriegman@cs.ucsd.edu Compuer
Video-Based Face Recogniion Using Probabilisic Appearance Manifolds Kuang-Chih Lee Jeffrey Ho Ming-Hsuan Yang David Kriegman klee10@uiuc.edu jho@cs.ucsd.edu myang@honda-ri.com kriegman@cs.ucsd.edu Compuer
Network management and QoS provisioning - QoS in Frame Relay. . packet switching with virtual circuit service (virtual circuits are bidirectional);
;") QoS in Frame Relay Frame relay characerisics are:. packe swiching wih virual circui service (virual circuis are bidirecional);. labels are called DLCI (Daa Link Connecion Idenifier);. for connecion is
QoS in Frame Relay Frame relay characerisics are:. packe swiching wih virual circui service (virual circuis are bidirecional);. labels are called DLCI (Daa Link Connecion Idenifier);. for connecion is
LEARNING PARTICLE DYNAMICS FOR MANIPULATING RIGID BODIES, DEFORMABLE OBJECTS, AND FLUIDS
 LEARNING PARTICLE DYNAMICS FOR MANIPULATING RIGID BODIES, DEFORMABLE OBJECTS, AND FLUIDS Anonymous auhors Paper under double-blind review ABSTRACT Real-life conrol asks involve maer of various subsances
LEARNING PARTICLE DYNAMICS FOR MANIPULATING RIGID BODIES, DEFORMABLE OBJECTS, AND FLUIDS Anonymous auhors Paper under double-blind review ABSTRACT Real-life conrol asks involve maer of various subsances
Incorporating Level Set Methods in Geographical Information Systems (GIS) for Land-Surface Process Modeling
 for Land-Surface Process Modeling") Incorporaing Level Se Mehods in Geographical Informaion Sysems (GIS) for Land-Surface Process Modeling D. Pullar Geography Planning and Archiecure, The Universiy of Queensland, Brisbane QLD 4072, Ausralia
Incorporaing Level Se Mehods in Geographical Informaion Sysems (GIS) for Land-Surface Process Modeling D. Pullar Geography Planning and Archiecure, The Universiy of Queensland, Brisbane QLD 4072, Ausralia
4 Error Control. 4.1 Issues with Reliable Protocols
 4 Error Conrol Jus abou all communicaion sysems aemp o ensure ha he daa ges o he oher end of he link wihou errors. Since i s impossible o build an error-free physical layer (alhough some shor links can
4 Error Conrol Jus abou all communicaion sysems aemp o ensure ha he daa ges o he oher end of he link wihou errors. Since i s impossible o build an error-free physical layer (alhough some shor links can
Robust Segmentation and Tracking of Colored Objects in Video
 IEEE TRANSACTIONS ON CSVT, VOL. 4, NO. 6, 2004 Robus Segmenaion and Tracking of Colored Objecs in Video Theo Gevers, member, IEEE Absrac Segmening and racking of objecs in video is of grea imporance for
IEEE TRANSACTIONS ON CSVT, VOL. 4, NO. 6, 2004 Robus Segmenaion and Tracking of Colored Objecs in Video Theo Gevers, member, IEEE Absrac Segmening and racking of objecs in video is of grea imporance for
UNSTEADY NUMERICAL SIMULATIONS OF DOWNWIND SAILS
 UNSTEADY NUMERICAL SIMULATIONS OF DOWNWIND SAILS M. Durand, Company K-Epsilon, Ecole Cenrale de Nanes, France F. Hauville, P. Bo, and B. Augier, Research Insiue of he French Naval Academy, France Y. Roux,
UNSTEADY NUMERICAL SIMULATIONS OF DOWNWIND SAILS M. Durand, Company K-Epsilon, Ecole Cenrale de Nanes, France F. Hauville, P. Bo, and B. Augier, Research Insiue of he French Naval Academy, France Y. Roux,
Hierarchical Information Fusion for Human Upper Limb Motion Capture
 1h Inernaional Conference on Informaion Fusion Seale, WA, USA, July 6-9, 009 Hierarchical Informaion Fusion for Human Upper Limb Moion Capure Zhiqiang Zhang 1,, Zhipei Huang 1 and Jiankang Wu 1, 1 Graduae
1h Inernaional Conference on Informaion Fusion Seale, WA, USA, July 6-9, 009 Hierarchical Informaion Fusion for Human Upper Limb Moion Capure Zhiqiang Zhang 1,, Zhipei Huang 1 and Jiankang Wu 1, 1 Graduae
M y. Image Warping. Targil 7 : Image Warping. Image Warping. 2D Geometric Transformations. image filtering: change range of image g(x) = T(f(x))
 = T(f(x))") Hebrew Universi Image Processing - 6 Image Warping Hebrew Universi Image Processing - 6 argil 7 : Image Warping D Geomeric ransormaions hp://www.jere-marin.com Man slides rom Seve Seiz and Aleei Eros Image
Hebrew Universi Image Processing - 6 Image Warping Hebrew Universi Image Processing - 6 argil 7 : Image Warping D Geomeric ransormaions hp://www.jere-marin.com Man slides rom Seve Seiz and Aleei Eros Image
MATH Differential Equations September 15, 2008 Project 1, Fall 2008 Due: September 24, 2008
 MATH 5 - Differenial Equaions Sepember 15, 8 Projec 1, Fall 8 Due: Sepember 4, 8 Lab 1.3 - Logisics Populaion Models wih Harvesing For his projec we consider lab 1.3 of Differenial Equaions pages 146 o
MATH 5 - Differenial Equaions Sepember 15, 8 Projec 1, Fall 8 Due: Sepember 4, 8 Lab 1.3 - Logisics Populaion Models wih Harvesing For his projec we consider lab 1.3 of Differenial Equaions pages 146 o
Some computational aspects for solving deep penetration problems in geomechanics
 Compu Mech (29) 44:549 561 DOI 1.17/s466-9-391-6 ORIGINAL PAPER Some compuaional aspecs for solving deep peneraion problems in geomechanics Daichao Sheng Majidreza Nazem John P. Carer Received: 8 December
Compu Mech (29) 44:549 561 DOI 1.17/s466-9-391-6 ORIGINAL PAPER Some compuaional aspecs for solving deep peneraion problems in geomechanics Daichao Sheng Majidreza Nazem John P. Carer Received: 8 December
Implementing Ray Casting in Tetrahedral Meshes with Programmable Graphics Hardware (Technical Report)
") Implemening Ray Casing in Terahedral Meshes wih Programmable Graphics Hardware (Technical Repor) Marin Kraus, Thomas Erl March 28, 2002 1 Inroducion Alhough cell-projecion, e.g., [3, 2], and resampling,
Implemening Ray Casing in Terahedral Meshes wih Programmable Graphics Hardware (Technical Repor) Marin Kraus, Thomas Erl March 28, 2002 1 Inroducion Alhough cell-projecion, e.g., [3, 2], and resampling,
DEFINITION OF THE LAPLACE TRANSFORM
 74 CHAPER 7 HE LAPLACE RANSFORM 7 DEFINIION OF HE LAPLACE RANSFORM REVIEW MAERIAL Improper inegral wih infinie limi of inegraio Inegraion y par and parial fracion decompoiion INRODUCION In elemenary calculu
74 CHAPER 7 HE LAPLACE RANSFORM 7 DEFINIION OF HE LAPLACE RANSFORM REVIEW MAERIAL Improper inegral wih infinie limi of inegraio Inegraion y par and parial fracion decompoiion INRODUCION In elemenary calculu
IROS 2015 Workshop on On-line decision-making in multi-robot coordination (DEMUR 15)
") IROS 2015 Workshop on On-line decision-making in muli-robo coordinaion () OPTIMIZATION-BASED COOPERATIVE MULTI-ROBOT TARGET TRACKING WITH REASONING ABOUT OCCLUSIONS KAROL HAUSMAN a,, GREGORY KAHN b, SACHIN
IROS 2015 Workshop on On-line decision-making in muli-robo coordinaion () OPTIMIZATION-BASED COOPERATIVE MULTI-ROBOT TARGET TRACKING WITH REASONING ABOUT OCCLUSIONS KAROL HAUSMAN a,, GREGORY KAHN b, SACHIN
A new algorithm for small object tracking based on super-resolution technique
 A new algorihm for small objec racking based on super-resoluion echnique Yabunayya Habibi, Dwi Rana Sulisyaningrum, and Budi Seiyono Ciaion: AIP Conference Proceedings 1867, 020024 (2017); doi: 10.1063/1.4994427
A new algorihm for small objec racking based on super-resoluion echnique Yabunayya Habibi, Dwi Rana Sulisyaningrum, and Budi Seiyono Ciaion: AIP Conference Proceedings 1867, 020024 (2017); doi: 10.1063/1.4994427
A time-space consistency solution for hardware-in-the-loop simulation system
 Inernaional Conference on Advanced Elecronic Science and Technology (AEST 206) A ime-space consisency soluion for hardware-in-he-loop simulaion sysem Zexin Jiang a Elecric Power Research Insiue of Guangdong
Inernaional Conference on Advanced Elecronic Science and Technology (AEST 206) A ime-space consisency soluion for hardware-in-he-loop simulaion sysem Zexin Jiang a Elecric Power Research Insiue of Guangdong
Image Based Computer-Aided Manufacturing Technology
 Sensors & Transducers 03 by IFSA hp://www.sensorsporal.com Image Based Compuer-Aided Manufacuring Technology Zhanqi HU Xiaoqin ZHANG Jinze LI Wei LI College of Mechanical Engineering Yanshan Universiy
Sensors & Transducers 03 by IFSA hp://www.sensorsporal.com Image Based Compuer-Aided Manufacuring Technology Zhanqi HU Xiaoqin ZHANG Jinze LI Wei LI College of Mechanical Engineering Yanshan Universiy
Chapter 3 MEDIA ACCESS CONTROL
 Chaper 3 MEDIA ACCESS CONTROL Overview Moivaion SDMA, FDMA, TDMA Aloha Adapive Aloha Backoff proocols Reservaion schemes Polling Disribued Compuing Group Mobile Compuing Summer 2003 Disribued Compuing
Chaper 3 MEDIA ACCESS CONTROL Overview Moivaion SDMA, FDMA, TDMA Aloha Adapive Aloha Backoff proocols Reservaion schemes Polling Disribued Compuing Group Mobile Compuing Summer 2003 Disribued Compuing
Coded Caching with Multiple File Requests
 Coded Caching wih Muliple File Requess Yi-Peng Wei Sennur Ulukus Deparmen of Elecrical and Compuer Engineering Universiy of Maryland College Park, MD 20742 ypwei@umd.edu ulukus@umd.edu Absrac We sudy a
Coded Caching wih Muliple File Requess Yi-Peng Wei Sennur Ulukus Deparmen of Elecrical and Compuer Engineering Universiy of Maryland College Park, MD 20742 ypwei@umd.edu ulukus@umd.edu Absrac We sudy a
Optimal trajectory approximation by cubic splines on fed-batch control problems
 Opimal rajecory approximaion by cubic splines on fed-bach conrol problems A. ISMAEL F. VAZ Producion and Sysems Deparmen Minho Universiy, Engineering School aivaz@dps.uminho.p EUGÉNIO C. FERREIRA Cenro
Opimal rajecory approximaion by cubic splines on fed-bach conrol problems A. ISMAEL F. VAZ Producion and Sysems Deparmen Minho Universiy, Engineering School aivaz@dps.uminho.p EUGÉNIO C. FERREIRA Cenro
Overview of Board Revisions
 s Sysem Overview MicroAuoBox Embedded PC MicroAuoBox II can be enhanced wih he MicroAuoBox Embedded PC. The MicroAuoBox EmbeddedPC is powered via he MicroAuoBox II power inpu connecor. Wih he common power
s Sysem Overview MicroAuoBox Embedded PC MicroAuoBox II can be enhanced wih he MicroAuoBox Embedded PC. The MicroAuoBox EmbeddedPC is powered via he MicroAuoBox II power inpu connecor. Wih he common power
Virtual Recovery of Excavated Archaeological Finds
 Virual Recovery of Excavaed Archaeological Finds Jiang Yu ZHENG, Zhong Li ZHANG*, Norihiro ABE Kyushu Insiue of Technology, Iizuka, Fukuoka 820, Japan *Museum of he Terra-Coa Warrlors and Horses, Lin Tong,
Virual Recovery of Excavaed Archaeological Finds Jiang Yu ZHENG, Zhong Li ZHANG*, Norihiro ABE Kyushu Insiue of Technology, Iizuka, Fukuoka 820, Japan *Museum of he Terra-Coa Warrlors and Horses, Lin Tong,
33.0 Reference: Application, Volume 1, Chapter 2, pages
 1 33.0 Reference: Applicaion, Volume 1, Chaper 2, pages 2-79 2-91 1.33.0(b) Please provide a schedule seing ou he head coun for each funcion for F1999 o F2006. RESPONSE: Hisorical headcoun daa is racked
1 33.0 Reference: Applicaion, Volume 1, Chaper 2, pages 2-79 2-91 1.33.0(b) Please provide a schedule seing ou he head coun for each funcion for F1999 o F2006. RESPONSE: Hisorical headcoun daa is racked
FLOW VISUALIZATION USING MOVING TEXTURES * Nelson Max Lawrence Livermore National Laboratory Livermore, California
 FLOW VISUALIZATION USING MOVING TEXTURES * Nelson Max Lawrence Livermore Naional Laboraor Livermore, California Barr Becker Lawrence Livermore Naional Laboraor Livermore, California SUMMARY We presen a
FLOW VISUALIZATION USING MOVING TEXTURES * Nelson Max Lawrence Livermore Naional Laboraor Livermore, California Barr Becker Lawrence Livermore Naional Laboraor Livermore, California SUMMARY We presen a
The Laplace Transform
 7 he Laplace ranform 7 Definiion of he Laplace ranform 7 Invere ranform and ranform of Derivaive 7 Invere ranform 7 ranform of Derivaive 73 Operaional Properie I 73 ranlaion on he -Axi 73 ranlaion on he
7 he Laplace ranform 7 Definiion of he Laplace ranform 7 Invere ranform and ranform of Derivaive 7 Invere ranform 7 ranform of Derivaive 73 Operaional Properie I 73 ranlaion on he -Axi 73 ranlaion on he
PLCopen for efficiency in automation
 Technical Paper PLCopen Technical Commiee 2 Funcion Blocks for Moion Conrol Par 6 Fluid Power Exensions Version 2.0, Published DISCLAIMER OF WARRANTIES THIS DOCUMENT IS PROVIDED ON AN AS IS BASIS AND MAY
Technical Paper PLCopen Technical Commiee 2 Funcion Blocks for Moion Conrol Par 6 Fluid Power Exensions Version 2.0, Published DISCLAIMER OF WARRANTIES THIS DOCUMENT IS PROVIDED ON AN AS IS BASIS AND MAY
Location. Electrical. Loads. 2-wire mains-rated. 0.5 mm² to 1.5 mm² Max. length 300 m (with 1.5 mm² cable). Example: Belden 8471
. Example: Belden 8471") Produc Descripion Insallaion and User Guide Transiser Dimmer (454) The DIN rail mouned 454 is a 4channel ransisor dimmer. I can operae in one of wo modes; leading edge or railing edge. All 4 channels operae
Produc Descripion Insallaion and User Guide Transiser Dimmer (454) The DIN rail mouned 454 is a 4channel ransisor dimmer. I can operae in one of wo modes; leading edge or railing edge. All 4 channels operae
Elastic web processing lines : optimal tension and velocity closed loop bandwidths
 Elasi web proessing lines : opimal ension and veloiy losed loop bandwidhs Dominique KNIEL, Prof Web Handling Researh Group, Universiy of Srasbourg, Frane kniel@unisra.fr 6 AIMCAL Web Coaing & Handling
Elasi web proessing lines : opimal ension and veloiy losed loop bandwidhs Dominique KNIEL, Prof Web Handling Researh Group, Universiy of Srasbourg, Frane kniel@unisra.fr 6 AIMCAL Web Coaing & Handling
Motor Control. 5. Control. Motor Control. Motor Control
 5. Conrol In his chaper we will do: Feedback Conrol On/Off Conroller PID Conroller Moor Conrol Why use conrol a all? Correc or wrong? Supplying a cerain volage / pulsewidh will make he moor spin a a cerain
5. Conrol In his chaper we will do: Feedback Conrol On/Off Conroller PID Conroller Moor Conrol Why use conrol a all? Correc or wrong? Supplying a cerain volage / pulsewidh will make he moor spin a a cerain
arxiv: v1 [cs.cv] 11 Jan 2019
![arxiv: v1 [cs.cv] 11 Jan 2019](/thumbs/93/114298094.jpg "arxiv: v1 [cs.cv] 11 Jan 2019") A General Opimizaion-based Framework for Global Pose Esimaion wih Muliple Sensors arxiv:191.3642v1 [cs.cv] 11 Jan 219 Tong Qin, Shaozu Cao, Jie Pan, and Shaojie Shen Absrac Accurae sae esimaion is a fundamenal
A General Opimizaion-based Framework for Global Pose Esimaion wih Muliple Sensors arxiv:191.3642v1 [cs.cv] 11 Jan 219 Tong Qin, Shaozu Cao, Jie Pan, and Shaojie Shen Absrac Accurae sae esimaion is a fundamenal
J. Vis. Commun. Image R.
 J. Vis. Commun. Image R. 20 (2009) 9 27 Conens liss available a ScienceDirec J. Vis. Commun. Image R. journal homepage: www.elsevier.com/locae/jvci Face deecion and racking using a Boosed Adapive Paricle
J. Vis. Commun. Image R. 20 (2009) 9 27 Conens liss available a ScienceDirec J. Vis. Commun. Image R. journal homepage: www.elsevier.com/locae/jvci Face deecion and racking using a Boosed Adapive Paricle
FACIAL ACTION TRACKING USING PARTICLE FILTERS AND ACTIVE APPEARANCE MODELS. Soumya Hamlaoui & Franck Davoine
 FACIAL ACTION TRACKING USING PARTICLE FILTERS AND ACTIVE APPEARANCE MODELS Soumya Hamlaoui & Franck Davoine HEUDIASYC Mixed Research Uni, CNRS / Compiègne Universiy of Technology BP 20529, 60205 Compiègne
FACIAL ACTION TRACKING USING PARTICLE FILTERS AND ACTIVE APPEARANCE MODELS Soumya Hamlaoui & Franck Davoine HEUDIASYC Mixed Research Uni, CNRS / Compiègne Universiy of Technology BP 20529, 60205 Compiègne