Automated Video Analysis of Crowd Behavior
|
|
|
- Kevin Collins
- 6 years ago
- Views:
Transcription
1 Automated Video Analysis of Crowd Behavior Robert Collins CSE Department Mar 30, 2009 Computational Science Seminar Series, Spring 2009.



2 We Are... Lab for Perception, Action and Cognition

 Biometrics")


3 Research Interest: Looking at People (one of many!) Biometrics Pose/Activity Recognition Multi-person tracking Analysis of social behavior

4 Crowd Analysis: Motivation Automated video analysis of crowd scenes using computer vision tools, to facilitate: Real-time monitoring situation awareness notification / alarms After-action review trend analysis analyze abnormal events

5 Historical Perspective Our work has roots in video surveillance algorithms that automatically detect and track moving objects. Main components of a video surveillance system: Foreground/background subtraction Connected components to get blobs Data association to get trajectories
6 Simple Background Subtraction Keep a background image (assumed to have no objects present). Subtract current frame from background image Label pixels as foreground (1) or background (0) based on thresholding I(t) abs T M(t) B B = I(0); loop time t I(t) = next frame; diff = abs[b I(t)]; M(t) = threshold(diff, ); end
 delay B(t) I(t) + (1 )B(t-1) B(0) = I(0); loop time t I(t) = next frame; diff = abs[b(t-1) I(t)]; M(t) = threshold(diff, ); B(t) = I(t)+(1 )B(t-1);")
7 Adaptive Background Subtraction Continually update background image with current frame Yields resilience to slow changes in illumination I(t) abs T M(t) B(t-1) delay B(t) I(t) + (1 )B(t-1) B(0) = I(0); loop time t I(t) = next frame; diff = abs[b(t-1) I(t)]; M(t) = threshold(diff, ); B(t) = I(t)+(1 )B(t-1); end


8 Grouping FG Pixels Into Blobs dilate Connected components AND Bounding box = smallest rectangle containing all pixels on the object.
9 Data Association Determining the correspondence of blobs across frames is based on feature similarity between blobs. Commonly used features: location, size / shape, velocity, appearance For example: location, size and shape similarity can be measured based on bounding box overlap: A B score = 2 * area(a and B) area(a) + area(b) A = bounding box at time t B = bounding box at time t+1

10 Simple Surveillance Results movie




11 Problem: Blob Merge/Split merge occlusion occlusion split When two objects pass close to each other, they are detected as a single blob. Often, one object will become occluded by the other one. One of the challenging problems is to maintain correct labeling of each object after they split again.


12 Problem with Crowd Scenes Merge/Split events are the rule, rather than the exception!
 Good for")

13 Our Approach Estimate number/configuration of people using Markov Chain Monte Carlo (a stochastic search method) Good for low-resolution / wide-angle views. Still relies on foreground/background segmentation. Not appropriate for very high crowd density.
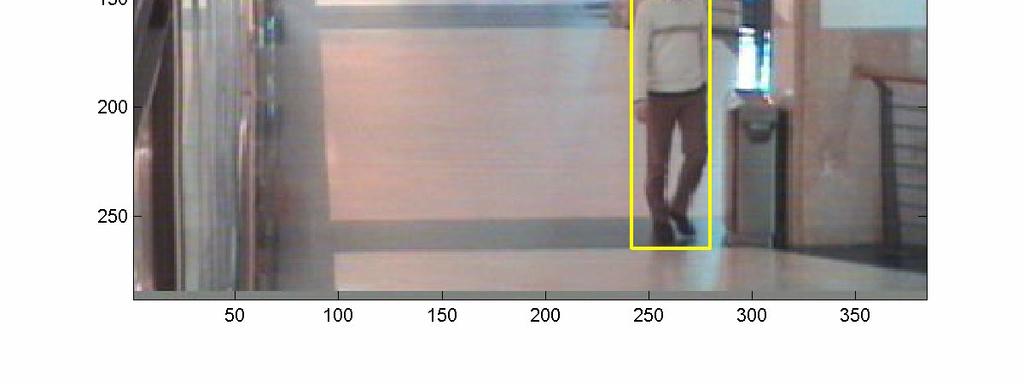
14 Problem Statement Given a foreground image, and person-sized bounding box*, find a configuration (number and locations) of bounding boxes that cover a majority of foreground pixels while leaving a majority of background pixels uncovered. foreground image person-sized bounding box *note: height, width and orientation of the bounding box may depend on image location we determine these relationships beforehand through a calibration procedure.

15 Likelihood Score To measure how good a proposed configuration is, we generate a foreground image from it and compare with the observed foreground image to get a likelihood score. config = {{x 1,y 1,w 1,h 1,theta 1 },{x 2,y 2,w 2,h 2,theta 2 },{x 3,y 3,w 3,h 3,theta 3 }} generated foreground image observed foreground image compare Likelihood Score



16 Likelihood Score Bernoulli distribution model likelihood simplify, by assuming log likelihood Number of pixels that disagree!
17 Searching for the Max The space of configurations is very large. We can t exhaustively search for the max likelihood configuration. We can t even really uniformly sample the space to a reasonable degree of accuracy. config k = {{x 1,y 1,w 1,h 1,theta 1 },{x 2,y 2,w 2,h 2,theta 2 },,{x k,y k,w k,h k,theta k }} Let N = number of possible locations for (x i,y i ) in a k-person configuration. Size of config k = N k And we don t even know how many people there are... Size of config space = N 0 + N 1 + N 2 + N 3 + If we also wanted to search for width, height and orientation, this space would be even more huge.
18 Searching for the Max Local Search Approach Given a current configuration, propose a small change to it Compare likelihood of proposed config with likelihood of the current config Decide whether to accept the change
19 Proposals Add a rectangle (birth) add current configuration proposed configuration
20 Proposals Remove a rectangle (death) remove current configuration proposed configuration

21 Move a rectangle Proposals move current configuration proposed configuration
22 Searching for the Max Naïve Acceptance Accept proposed configuration if it has a larger likelihood score, i.e. Compute a = L(proposed) L(current) Accept if a > 1 Problem: leads to hill-climbing behavior that gets stuck in local maxima Brings us here But we really want to be over here! start Likelihood
23 Searching for the Max The MCMC approach Generate random configurations from a distribution proportional to the likelihood! Generates many high likelihood configurations Likelihood Generates few low likelihood ones.
24 Searching for the Max The MCMC approach Generate random configurations from a distribution proportional to the likelihood! This searches the space of configurations in an efficient way. Now just remember the generated configuration with the highest likelihood.
 death birth config A birth death config C config B move move move move move move")
25 Sounds good, but how to do it? Think of configurations as nodes in a graph. Put a link between nodes if you can get from one config to the other in one step (birth, death, move) death birth config A birth death config C config B move move move move move move move move birth death config D move move config E death birth Note links come in pairs: birth/death; move/move
26 Detailed Balance Consider a pair of configuration nodes r,s Want to generate them with frequency relative to their likelihoods L(r) and L(s) Let q(r,s) be relative frequency of proposing configuration s when the current state is r (and vice versa) A sufficient condition to generate r,s with the desired frequency is L(r) r q(r,s) L(r) q(r,s) = L(s) q(s,r) detailed balance s L(s) q(s,r)
27 Detailed Balance Typically, your proposal frequencies do NOT satisfy detailed balance (unless you are extremely lucky). To fix this, we introduce a computational fudge factor a Detailed balance: a* L(r) q(r,s) = L(s) q(s,r) a * q(r,s) Solve for a: L(r) r a = L(s) q(s,r) L(r) q(r,s) s L(s) q(s,r)
28 MCMC Sampling Metropolis Hastings algorithm Propose a new configuration Compute a = L(proposed) q(proposed,current) L(current) q(current,proposed) Accept if a > 1 Else accept anyways with probability a Difference from Naïve algorithm
29 Trans-dimensional MCMC Green s reversible-jump approach (RJMCMC) gives a general template for exploring and comparing states of differing dimension (diff numbers of rectangles in our case). Proposals come in reversible pairs: birth/death and move/move. We should add another term to the acceptance ratio for pairs that jump across dimensions. However, that term is 1 for our simple proposals.

30 MCMC in Action Sequence of proposed configurations Sequence of accepted configurations movies

31 MCMC in Action Max likelihood configuration Looking good!

32 Examples

33 Adding Shape to the Estimation video frame estimated state library of candidate shapes
34 Adding Shape to the Estimation MCMC iterations movie MCMC proposes changes to current configuration add/remove a person shift location of person change their shape


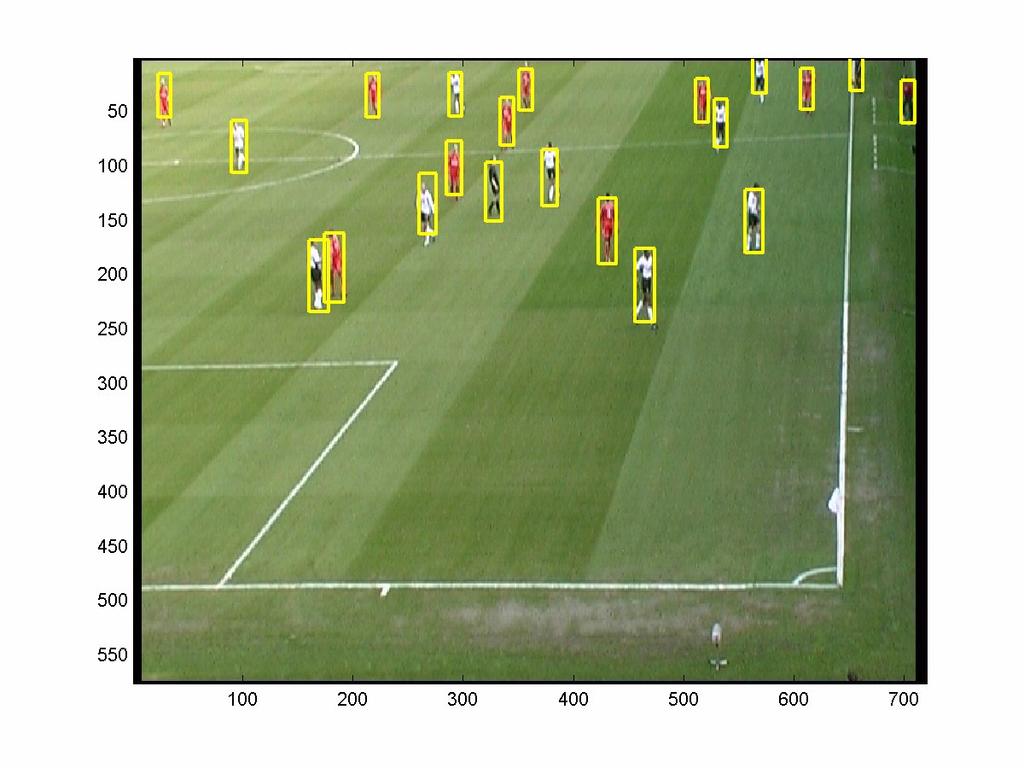
35 Soccer Dataset Evaluation run on every 10th frame green contours: true positives red boxes: false negatives pink contours: false positives movie detailed view


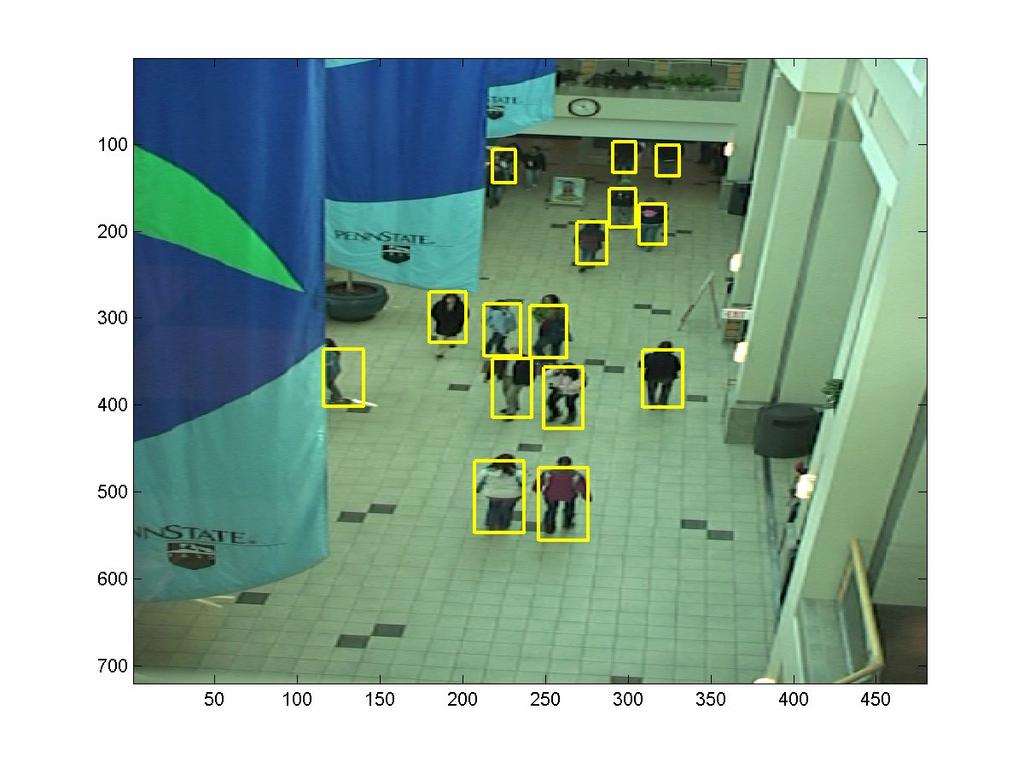
36 Caviar Dataset evaluation on six sequences learned shapes results from sample frames

37 Detections, Nov 22, Curtin Road
. Known as the fingering effect. movie Green: leftward moving.")
38 Crowd Behavior In areas of bidirectional motion, people tend to follow others to minimize collisions (maximize throughput). Known as the fingering effect. movie Green: leftward moving. Red: rightward moving,


;")
39 Fingering Effect Density by image row Green (leftward); Red (rightward)

40 Detections, Sep 6, Gate A

41 Crowd Flow/Density Keep in mind this scene structure (as depicted by red lines)

42 Crowd Flow/Density 30 minute period

43 Crowd Flow/Density movie Time Lapse. Integrated over spatial/temporal windows.
44 GateA Path Counts \ movie Maintain a running count of number of people whose trajectories cross a set of user-specified lines (color-coded).

45 Collective locomotion find small groups traveling in a crowd sociological hypothesis: validating that the majority of people in a crowd cluster in small groups public safety: improving situation awareness and realtime emergency response during public disturbances through real-time monitoring and modeling of crowd behavior
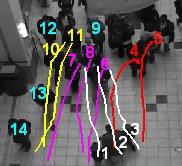
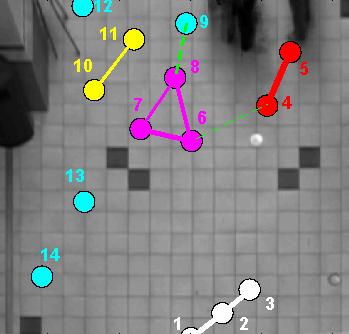
46 Agglomerative Hierarchical Clustering


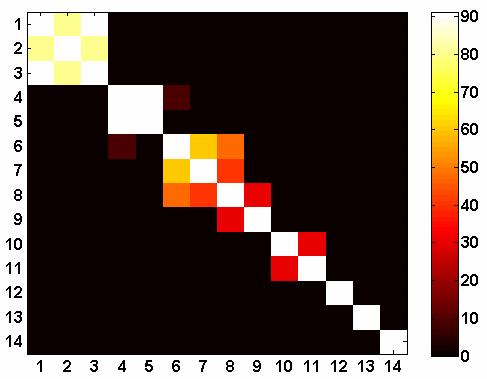
47 Sample Results note: computer only sees this view! Evaluation reveals substantial agreement between computer-generated groupings and those found by human coders (ground truth) p <.001

48 More Results


49 Research Directions Validation; improve algorithm robustness. Detection of stationary people Tackle the HARD problems. Primarily high-density crowds.


 or")
50 Research Directions Idea: might be good to try other human shapes (activities) or other animals/objects.
Crowd Scene Analysis
 Crowd Scene Analysis Using computer vision tools to look at people in public places Real-time monitoring situation awareness notifications/alarms After-action review traffic analysis Crowd Scene Analysis
Crowd Scene Analysis Using computer vision tools to look at people in public places Real-time monitoring situation awareness notifications/alarms After-action review traffic analysis Crowd Scene Analysis
Lecture 28 Intro to Tracking
 Lecture 28 Intro to Tracking Some overlap with T&V Section 8.4.2 and Appendix A.8 Recall: Blob Merge/Split merge occlusion occlusion split When two objects pass close to each other, they are detected as
Lecture 28 Intro to Tracking Some overlap with T&V Section 8.4.2 and Appendix A.8 Recall: Blob Merge/Split merge occlusion occlusion split When two objects pass close to each other, they are detected as
Recall: Blob Merge/Split Lecture 28
 Recall: Blob Merge/Split Lecture 28 merge occlusion Intro to Tracking Some overlap with T&V Section 8.4.2 and Appendix A.8 occlusion split When two objects pass close to each other, they are detected as
Recall: Blob Merge/Split Lecture 28 merge occlusion Intro to Tracking Some overlap with T&V Section 8.4.2 and Appendix A.8 occlusion split When two objects pass close to each other, they are detected as
Real-time Detection of Illegally Parked Vehicles Using 1-D Transformation
 Real-time Detection of Illegally Parked Vehicles Using 1-D Transformation Jong Taek Lee, M. S. Ryoo, Matthew Riley, and J. K. Aggarwal Computer & Vision Research Center Dept. of Electrical & Computer Engineering,
Real-time Detection of Illegally Parked Vehicles Using 1-D Transformation Jong Taek Lee, M. S. Ryoo, Matthew Riley, and J. K. Aggarwal Computer & Vision Research Center Dept. of Electrical & Computer Engineering,
CS 664 Segmentation. Daniel Huttenlocher
 CS 664 Segmentation Daniel Huttenlocher Grouping Perceptual Organization Structural relationships between tokens Parallelism, symmetry, alignment Similarity of token properties Often strong psychophysical
CS 664 Segmentation Daniel Huttenlocher Grouping Perceptual Organization Structural relationships between tokens Parallelism, symmetry, alignment Similarity of token properties Often strong psychophysical
CSE 586 Final Programming Project Spring 2011 Due date: Tuesday, May 3
 CSE 586 Final Programming Project Spring 2011 Due date: Tuesday, May 3 What I have in mind for our last programming project is to do something with either graphical models or random sampling. A few ideas
CSE 586 Final Programming Project Spring 2011 Due date: Tuesday, May 3 What I have in mind for our last programming project is to do something with either graphical models or random sampling. A few ideas
Definition, Detection, and Evaluation of Meeting Events in Airport Surveillance Videos
 Definition, Detection, and Evaluation of Meeting Events in Airport Surveillance Videos Sung Chun Lee, Chang Huang, and Ram Nevatia University of Southern California, Los Angeles, CA 90089, USA sungchun@usc.edu,
Definition, Detection, and Evaluation of Meeting Events in Airport Surveillance Videos Sung Chun Lee, Chang Huang, and Ram Nevatia University of Southern California, Los Angeles, CA 90089, USA sungchun@usc.edu,
Tracking People. Tracking People: Context
 Tracking People A presentation of Deva Ramanan s Finding and Tracking People from the Bottom Up and Strike a Pose: Tracking People by Finding Stylized Poses Tracking People: Context Motion Capture Surveillance
Tracking People A presentation of Deva Ramanan s Finding and Tracking People from the Bottom Up and Strike a Pose: Tracking People by Finding Stylized Poses Tracking People: Context Motion Capture Surveillance
Particle Filters for Visual Tracking
 Particle Filters for Visual Tracking T. Chateau, Pascal Institute, Clermont-Ferrand 1 Content Particle filtering: a probabilistic framework SIR particle filter MCMC particle filter RJMCMC particle filter
Particle Filters for Visual Tracking T. Chateau, Pascal Institute, Clermont-Ferrand 1 Content Particle filtering: a probabilistic framework SIR particle filter MCMC particle filter RJMCMC particle filter
Human Upper Body Pose Estimation in Static Images
 1. Research Team Human Upper Body Pose Estimation in Static Images Project Leader: Graduate Students: Prof. Isaac Cohen, Computer Science Mun Wai Lee 2. Statement of Project Goals This goal of this project
1. Research Team Human Upper Body Pose Estimation in Static Images Project Leader: Graduate Students: Prof. Isaac Cohen, Computer Science Mun Wai Lee 2. Statement of Project Goals This goal of this project
Performance Evaluation Metrics and Statistics for Positional Tracker Evaluation
 Performance Evaluation Metrics and Statistics for Positional Tracker Evaluation Chris J. Needham and Roger D. Boyle School of Computing, The University of Leeds, Leeds, LS2 9JT, UK {chrisn,roger}@comp.leeds.ac.uk
Performance Evaluation Metrics and Statistics for Positional Tracker Evaluation Chris J. Needham and Roger D. Boyle School of Computing, The University of Leeds, Leeds, LS2 9JT, UK {chrisn,roger}@comp.leeds.ac.uk
Introduction to behavior-recognition and object tracking
 Introduction to behavior-recognition and object tracking Xuan Mo ipal Group Meeting April 22, 2011 Outline Motivation of Behavior-recognition Four general groups of behaviors Core technologies Future direction
Introduction to behavior-recognition and object tracking Xuan Mo ipal Group Meeting April 22, 2011 Outline Motivation of Behavior-recognition Four general groups of behaviors Core technologies Future direction
cse 252c Fall 2004 Project Report: A Model of Perpendicular Texture for Determining Surface Geometry
 cse 252c Fall 2004 Project Report: A Model of Perpendicular Texture for Determining Surface Geometry Steven Scher December 2, 2004 Steven Scher SteveScher@alumni.princeton.edu Abstract Three-dimensional
cse 252c Fall 2004 Project Report: A Model of Perpendicular Texture for Determining Surface Geometry Steven Scher December 2, 2004 Steven Scher SteveScher@alumni.princeton.edu Abstract Three-dimensional
Observing people with multiple cameras
 First Short Spring School on Surveillance (S 4 ) May 17-19, 2011 Modena,Italy Course Material Observing people with multiple cameras Andrea Cavallaro Queen Mary University, London (UK) Observing people
First Short Spring School on Surveillance (S 4 ) May 17-19, 2011 Modena,Italy Course Material Observing people with multiple cameras Andrea Cavallaro Queen Mary University, London (UK) Observing people
Multiple Ant Tracking with Global Foreground Maximization and Variable Target Proposal Distribution
 Multiple Ant Tracking with Global Foreground Maximization and Variable Target Proposal Distribution Mary Fletcher Dept of Computer Science Colby College Waterville, ME 04901 mvfletch@colby.edu Anna Dornhaus
Multiple Ant Tracking with Global Foreground Maximization and Variable Target Proposal Distribution Mary Fletcher Dept of Computer Science Colby College Waterville, ME 04901 mvfletch@colby.edu Anna Dornhaus
Approximate Bayesian Computation. Alireza Shafaei - April 2016
 Approximate Bayesian Computation Alireza Shafaei - April 2016 The Problem Given a dataset, we are interested in. The Problem Given a dataset, we are interested in. The Problem Given a dataset, we are interested
Approximate Bayesian Computation Alireza Shafaei - April 2016 The Problem Given a dataset, we are interested in. The Problem Given a dataset, we are interested in. The Problem Given a dataset, we are interested
Evaluation of Moving Object Tracking Techniques for Video Surveillance Applications
 International Journal of Current Engineering and Technology E-ISSN 2277 4106, P-ISSN 2347 5161 2015INPRESSCO, All Rights Reserved Available at http://inpressco.com/category/ijcet Research Article Evaluation
International Journal of Current Engineering and Technology E-ISSN 2277 4106, P-ISSN 2347 5161 2015INPRESSCO, All Rights Reserved Available at http://inpressco.com/category/ijcet Research Article Evaluation
Detection and Classification of Vehicles
 Detection and Classification of Vehicles Gupte et al. 2002 Zeeshan Mohammad ECG 782 Dr. Brendan Morris. Introduction Previously, magnetic loop detectors were used to count vehicles passing over them. Advantages
Detection and Classification of Vehicles Gupte et al. 2002 Zeeshan Mohammad ECG 782 Dr. Brendan Morris. Introduction Previously, magnetic loop detectors were used to count vehicles passing over them. Advantages
Detecting Piecewise Linear Networks Using Reversible Jump Markov Chain Monte Carlo
 Clemson University TigerPrints All Theses Theses 8-2010 Detecting Piecewise Linear Networks Using Reversible Jump Markov Chain Monte Carlo Akshay Apte Clemson University, apte.aa@gmail.com Follow this
Clemson University TigerPrints All Theses Theses 8-2010 Detecting Piecewise Linear Networks Using Reversible Jump Markov Chain Monte Carlo Akshay Apte Clemson University, apte.aa@gmail.com Follow this
Level-set MCMC Curve Sampling and Geometric Conditional Simulation
 Level-set MCMC Curve Sampling and Geometric Conditional Simulation Ayres Fan John W. Fisher III Alan S. Willsky February 16, 2007 Outline 1. Overview 2. Curve evolution 3. Markov chain Monte Carlo 4. Curve
Level-set MCMC Curve Sampling and Geometric Conditional Simulation Ayres Fan John W. Fisher III Alan S. Willsky February 16, 2007 Outline 1. Overview 2. Curve evolution 3. Markov chain Monte Carlo 4. Curve
Tri-modal Human Body Segmentation
 Tri-modal Human Body Segmentation Master of Science Thesis Cristina Palmero Cantariño Advisor: Sergio Escalera Guerrero February 6, 2014 Outline 1 Introduction 2 Tri-modal dataset 3 Proposed baseline 4
Tri-modal Human Body Segmentation Master of Science Thesis Cristina Palmero Cantariño Advisor: Sergio Escalera Guerrero February 6, 2014 Outline 1 Introduction 2 Tri-modal dataset 3 Proposed baseline 4
Samuel Coolidge, Dan Simon, Dennis Shasha, Technical Report NYU/CIMS/TR
 Detecting Missing and Spurious Edges in Large, Dense Networks Using Parallel Computing Samuel Coolidge, sam.r.coolidge@gmail.com Dan Simon, des480@nyu.edu Dennis Shasha, shasha@cims.nyu.edu Technical Report
Detecting Missing and Spurious Edges in Large, Dense Networks Using Parallel Computing Samuel Coolidge, sam.r.coolidge@gmail.com Dan Simon, des480@nyu.edu Dennis Shasha, shasha@cims.nyu.edu Technical Report
Midterm Examination CS540-2: Introduction to Artificial Intelligence
 Midterm Examination CS540-2: Introduction to Artificial Intelligence March 15, 2018 LAST NAME: FIRST NAME: Problem Score Max Score 1 12 2 13 3 9 4 11 5 8 6 13 7 9 8 16 9 9 Total 100 Question 1. [12] Search
Midterm Examination CS540-2: Introduction to Artificial Intelligence March 15, 2018 LAST NAME: FIRST NAME: Problem Score Max Score 1 12 2 13 3 9 4 11 5 8 6 13 7 9 8 16 9 9 Total 100 Question 1. [12] Search
A multiple hypothesis tracking method with fragmentation handling
 A multiple hypothesis tracking method with fragmentation handling Atousa Torabi École Polytechnique de Montréal P.O. Box 6079, Station Centre-ville Montréal (Québec), Canada, H3C 3A7 atousa.torabi@polymtl.ca
A multiple hypothesis tracking method with fragmentation handling Atousa Torabi École Polytechnique de Montréal P.O. Box 6079, Station Centre-ville Montréal (Québec), Canada, H3C 3A7 atousa.torabi@polymtl.ca
10.4 Linear interpolation method Newton s method
 10.4 Linear interpolation method The next best thing one can do is the linear interpolation method, also known as the double false position method. This method works similarly to the bisection method by
10.4 Linear interpolation method The next best thing one can do is the linear interpolation method, also known as the double false position method. This method works similarly to the bisection method by
Pairwise Threshold for Gaussian Mixture Classification and its Application on Human Tracking Enhancement
 Pairwise Threshold for Gaussian Mixture Classification and its Application on Human Tracking Enhancement Daegeon Kim Sung Chun Lee Institute for Robotics and Intelligent Systems University of Southern
Pairwise Threshold for Gaussian Mixture Classification and its Application on Human Tracking Enhancement Daegeon Kim Sung Chun Lee Institute for Robotics and Intelligent Systems University of Southern
arxiv: v1 [cs.cv] 2 Sep 2018
![arxiv: v1 [cs.cv] 2 Sep 2018](/thumbs/85/92128474.jpg "arxiv: v1 [cs.cv] 2 Sep 2018") Natural Language Person Search Using Deep Reinforcement Learning Ankit Shah Language Technologies Institute Carnegie Mellon University aps1@andrew.cmu.edu Tyler Vuong Electrical and Computer Engineering
Natural Language Person Search Using Deep Reinforcement Learning Ankit Shah Language Technologies Institute Carnegie Mellon University aps1@andrew.cmu.edu Tyler Vuong Electrical and Computer Engineering
Stochastic geometry. automatic object detection and tracking. remotely sensed image sequences
 Stochastic geometry for automatic object detection and tracking in remotely sensed image sequences Paula CR https://team.inria.fr/ayin/paula-craciun/ This work has been done in collaboration with dr. Josiane
Stochastic geometry for automatic object detection and tracking in remotely sensed image sequences Paula CR https://team.inria.fr/ayin/paula-craciun/ This work has been done in collaboration with dr. Josiane
Simultaneous Appearance Modeling and Segmentation for Matching People under Occlusion
 Simultaneous Appearance Modeling and Segmentation for Matching People under Occlusion Zhe Lin, Larry S. Davis, David Doermann, and Daniel DeMenthon Institute for Advanced Computer Studies University of
Simultaneous Appearance Modeling and Segmentation for Matching People under Occlusion Zhe Lin, Larry S. Davis, David Doermann, and Daniel DeMenthon Institute for Advanced Computer Studies University of
CS 534: Computer Vision Segmentation and Perceptual Grouping
 CS 534: Computer Vision Segmentation and Perceptual Grouping Ahmed Elgammal Dept of Computer Science CS 534 Segmentation - 1 Outlines Mid-level vision What is segmentation Perceptual Grouping Segmentation
CS 534: Computer Vision Segmentation and Perceptual Grouping Ahmed Elgammal Dept of Computer Science CS 534 Segmentation - 1 Outlines Mid-level vision What is segmentation Perceptual Grouping Segmentation
Motion Tracking and Event Understanding in Video Sequences
 Motion Tracking and Event Understanding in Video Sequences Isaac Cohen Elaine Kang, Jinman Kang Institute for Robotics and Intelligent Systems University of Southern California Los Angeles, CA Objectives!
Motion Tracking and Event Understanding in Video Sequences Isaac Cohen Elaine Kang, Jinman Kang Institute for Robotics and Intelligent Systems University of Southern California Los Angeles, CA Objectives!
Robust False Positive Detection for Real-Time Multi-Target Tracking
 Robust False Positive Detection for Real-Time Multi-Target Tracking Henrik Brauer, Christos Grecos, and Kai von Luck University of the West of Scotland University of Applied Sciences Hamburg Henrik.Brauer@HAW-Hamburg.de
Robust False Positive Detection for Real-Time Multi-Target Tracking Henrik Brauer, Christos Grecos, and Kai von Luck University of the West of Scotland University of Applied Sciences Hamburg Henrik.Brauer@HAW-Hamburg.de
Human Motion Detection and Tracking for Video Surveillance
 Human Motion Detection and Tracking for Video Surveillance Prithviraj Banerjee and Somnath Sengupta Department of Electronics and Electrical Communication Engineering Indian Institute of Technology, Kharagpur,
Human Motion Detection and Tracking for Video Surveillance Prithviraj Banerjee and Somnath Sengupta Department of Electronics and Electrical Communication Engineering Indian Institute of Technology, Kharagpur,
Detecting and Identifying Moving Objects in Real-Time
 Chapter 9 Detecting and Identifying Moving Objects in Real-Time For surveillance applications or for human-computer interaction, the automated real-time tracking of moving objects in images from a stationary
Chapter 9 Detecting and Identifying Moving Objects in Real-Time For surveillance applications or for human-computer interaction, the automated real-time tracking of moving objects in images from a stationary
Object detection using Region Proposals (RCNN) Ernest Cheung COMP Presentation
 Ernest Cheung COMP Presentation") Object detection using Region Proposals (RCNN) Ernest Cheung COMP790-125 Presentation 1 2 Problem to solve Object detection Input: Image Output: Bounding box of the object 3 Object detection using CNN
Object detection using Region Proposals (RCNN) Ernest Cheung COMP790-125 Presentation 1 2 Problem to solve Object detection Input: Image Output: Bounding box of the object 3 Object detection using CNN
Image Analysis Lecture Segmentation. Idar Dyrdal
 Image Analysis Lecture 9.1 - Segmentation Idar Dyrdal Segmentation Image segmentation is the process of partitioning a digital image into multiple parts The goal is to divide the image into meaningful
Image Analysis Lecture 9.1 - Segmentation Idar Dyrdal Segmentation Image segmentation is the process of partitioning a digital image into multiple parts The goal is to divide the image into meaningful
Automatic Tracking of Moving Objects in Video for Surveillance Applications
 Automatic Tracking of Moving Objects in Video for Surveillance Applications Manjunath Narayana Committee: Dr. Donna Haverkamp (Chair) Dr. Arvin Agah Dr. James Miller Department of Electrical Engineering
Automatic Tracking of Moving Objects in Video for Surveillance Applications Manjunath Narayana Committee: Dr. Donna Haverkamp (Chair) Dr. Arvin Agah Dr. James Miller Department of Electrical Engineering
CS 231A Computer Vision (Fall 2012) Problem Set 3
 Problem Set 3") CS 231A Computer Vision (Fall 2012) Problem Set 3 Due: Nov. 13 th, 2012 (2:15pm) 1 Probabilistic Recursion for Tracking (20 points) In this problem you will derive a method for tracking a point of interest
CS 231A Computer Vision (Fall 2012) Problem Set 3 Due: Nov. 13 th, 2012 (2:15pm) 1 Probabilistic Recursion for Tracking (20 points) In this problem you will derive a method for tracking a point of interest
Face detection, validation and tracking. Océane Esposito, Grazina Laurinaviciute, Alexandre Majetniak
 Face detection, validation and tracking Océane Esposito, Grazina Laurinaviciute, Alexandre Majetniak Agenda Motivation and examples Face detection Face validation Face tracking Conclusion Motivation Goal:
Face detection, validation and tracking Océane Esposito, Grazina Laurinaviciute, Alexandre Majetniak Agenda Motivation and examples Face detection Face validation Face tracking Conclusion Motivation Goal:
Segmentation by Clustering. Segmentation by Clustering Reading: Chapter 14 (skip 14.5) General ideas
 General ideas") Reading: Chapter 14 (skip 14.5) Data reduction - obtain a compact representation for interesting image data in terms of a set of components Find components that belong together (form clusters) Frame differencing
Reading: Chapter 14 (skip 14.5) Data reduction - obtain a compact representation for interesting image data in terms of a set of components Find components that belong together (form clusters) Frame differencing
CS 223B Computer Vision Problem Set 3
 CS 223B Computer Vision Problem Set 3 Due: Feb. 22 nd, 2011 1 Probabilistic Recursion for Tracking In this problem you will derive a method for tracking a point of interest through a sequence of images.
CS 223B Computer Vision Problem Set 3 Due: Feb. 22 nd, 2011 1 Probabilistic Recursion for Tracking In this problem you will derive a method for tracking a point of interest through a sequence of images.
CS 534: Computer Vision Segmentation and Perceptual Grouping
 CS 534: Computer Vision Segmentation and Perceptual Grouping Spring 2005 Ahmed Elgammal Dept of Computer Science CS 534 Segmentation - 1 Where are we? Image Formation Human vision Cameras Geometric Camera
CS 534: Computer Vision Segmentation and Perceptual Grouping Spring 2005 Ahmed Elgammal Dept of Computer Science CS 534 Segmentation - 1 Where are we? Image Formation Human vision Cameras Geometric Camera
Pedestrian Detection and Tracking in Images and Videos
 Pedestrian Detection and Tracking in Images and Videos Azar Fazel Stanford University azarf@stanford.edu Viet Vo Stanford University vtvo@stanford.edu Abstract The increase in population density and accessibility
Pedestrian Detection and Tracking in Images and Videos Azar Fazel Stanford University azarf@stanford.edu Viet Vo Stanford University vtvo@stanford.edu Abstract The increase in population density and accessibility
A Fast Moving Object Detection Technique In Video Surveillance System
 A Fast Moving Object Detection Technique In Video Surveillance System Paresh M. Tank, Darshak G. Thakore, Computer Engineering Department, BVM Engineering College, VV Nagar-388120, India. Abstract Nowadays
A Fast Moving Object Detection Technique In Video Surveillance System Paresh M. Tank, Darshak G. Thakore, Computer Engineering Department, BVM Engineering College, VV Nagar-388120, India. Abstract Nowadays
Segmentation by Clustering Reading: Chapter 14 (skip 14.5)
") Segmentation by Clustering Reading: Chapter 14 (skip 14.5) Data reduction - obtain a compact representation for interesting image data in terms of a set of components Find components that belong together
Segmentation by Clustering Reading: Chapter 14 (skip 14.5) Data reduction - obtain a compact representation for interesting image data in terms of a set of components Find components that belong together
Recognition of Animal Skin Texture Attributes in the Wild. Amey Dharwadker (aap2174) Kai Zhang (kz2213)
 Kai Zhang (kz2213)") Recognition of Animal Skin Texture Attributes in the Wild Amey Dharwadker (aap2174) Kai Zhang (kz2213) Motivation Patterns and textures are have an important role in object description and understanding
Recognition of Animal Skin Texture Attributes in the Wild Amey Dharwadker (aap2174) Kai Zhang (kz2213) Motivation Patterns and textures are have an important role in object description and understanding
Data Mining 4. Cluster Analysis
 Data Mining 4. Cluster Analysis 4.5 Spring 2010 Instructor: Dr. Masoud Yaghini Introduction DBSCAN Algorithm OPTICS Algorithm DENCLUE Algorithm References Outline Introduction Introduction Density-based
Data Mining 4. Cluster Analysis 4.5 Spring 2010 Instructor: Dr. Masoud Yaghini Introduction DBSCAN Algorithm OPTICS Algorithm DENCLUE Algorithm References Outline Introduction Introduction Density-based
CITS 4402 Computer Vision
 CITS 4402 Computer Vision A/Prof Ajmal Mian Adj/A/Prof Mehdi Ravanbakhsh, CEO at Mapizy (www.mapizy.com) and InFarm (www.infarm.io) Lecture 02 Binary Image Analysis Objectives Revision of image formation
CITS 4402 Computer Vision A/Prof Ajmal Mian Adj/A/Prof Mehdi Ravanbakhsh, CEO at Mapizy (www.mapizy.com) and InFarm (www.infarm.io) Lecture 02 Binary Image Analysis Objectives Revision of image formation
CS 231A Computer Vision (Winter 2014) Problem Set 3
 Problem Set 3") CS 231A Computer Vision (Winter 2014) Problem Set 3 Due: Feb. 18 th, 2015 (11:59pm) 1 Single Object Recognition Via SIFT (45 points) In his 2004 SIFT paper, David Lowe demonstrates impressive object recognition
CS 231A Computer Vision (Winter 2014) Problem Set 3 Due: Feb. 18 th, 2015 (11:59pm) 1 Single Object Recognition Via SIFT (45 points) In his 2004 SIFT paper, David Lowe demonstrates impressive object recognition
Combining Edge and Color Features for Tracking Partially Occluded Humans
 Combining Edge and Color Features for Tracking Partially Occluded Humans Mandar Dixit and K.S. Venkatesh Computer Vision Lab., Department of Electrical Engineering, Indian Institute of Technology, Kanpur
Combining Edge and Color Features for Tracking Partially Occluded Humans Mandar Dixit and K.S. Venkatesh Computer Vision Lab., Department of Electrical Engineering, Indian Institute of Technology, Kanpur
Evaluating optical flow vectors through collision points of object trajectories in varying computergenerated snow intensities for autonomous vehicles
 Eingebettete Systeme Evaluating optical flow vectors through collision points of object trajectories in varying computergenerated snow intensities for autonomous vehicles 25/6/2018, Vikas Agrawal, Marcel
Eingebettete Systeme Evaluating optical flow vectors through collision points of object trajectories in varying computergenerated snow intensities for autonomous vehicles 25/6/2018, Vikas Agrawal, Marcel
Object Detection Design challenges
 Object Detection Design challenges How to efficiently search for likely objects Even simple models require searching hundreds of thousands of positions and scales Feature design and scoring How should
Object Detection Design challenges How to efficiently search for likely objects Even simple models require searching hundreds of thousands of positions and scales Feature design and scoring How should
Tracking Multiple Pedestrians in Real-Time Using Kinematics
 Abstract We present an algorithm for real-time tracking of multiple pedestrians in a dynamic scene. The algorithm is targeted for embedded systems and reduces computational and storage costs by using an
Abstract We present an algorithm for real-time tracking of multiple pedestrians in a dynamic scene. The algorithm is targeted for embedded systems and reduces computational and storage costs by using an
Detecting and Segmenting Humans in Crowded Scenes
 Detecting and Segmenting Humans in Crowded Scenes Mikel D. Rodriguez University of Central Florida 4000 Central Florida Blvd Orlando, Florida, 32816 mikel@cs.ucf.edu Mubarak Shah University of Central
Detecting and Segmenting Humans in Crowded Scenes Mikel D. Rodriguez University of Central Florida 4000 Central Florida Blvd Orlando, Florida, 32816 mikel@cs.ucf.edu Mubarak Shah University of Central
Multi-Camera Calibration, Object Tracking and Query Generation
 MITSUBISHI ELECTRIC RESEARCH LABORATORIES http://www.merl.com Multi-Camera Calibration, Object Tracking and Query Generation Porikli, F.; Divakaran, A. TR2003-100 August 2003 Abstract An automatic object
MITSUBISHI ELECTRIC RESEARCH LABORATORIES http://www.merl.com Multi-Camera Calibration, Object Tracking and Query Generation Porikli, F.; Divakaran, A. TR2003-100 August 2003 Abstract An automatic object
Image Segmentation. Shengnan Wang
 Image Segmentation Shengnan Wang shengnan@cs.wisc.edu Contents I. Introduction to Segmentation II. Mean Shift Theory 1. What is Mean Shift? 2. Density Estimation Methods 3. Deriving the Mean Shift 4. Mean
Image Segmentation Shengnan Wang shengnan@cs.wisc.edu Contents I. Introduction to Segmentation II. Mean Shift Theory 1. What is Mean Shift? 2. Density Estimation Methods 3. Deriving the Mean Shift 4. Mean
A Novel Multi-Planar Homography Constraint Algorithm for Robust Multi-People Location with Severe Occlusion
 A Novel Multi-Planar Homography Constraint Algorithm for Robust Multi-People Location with Severe Occlusion Paper ID:086 Abstract Multi-view approach has been proposed to solve occlusion and lack of visibility
A Novel Multi-Planar Homography Constraint Algorithm for Robust Multi-People Location with Severe Occlusion Paper ID:086 Abstract Multi-view approach has been proposed to solve occlusion and lack of visibility
Types of general clustering methods. Clustering Algorithms for general similarity measures. Similarity between clusters
 Types of general clustering methods Clustering Algorithms for general similarity measures agglomerative versus divisive algorithms agglomerative = bottom-up build up clusters from single objects divisive
Types of general clustering methods Clustering Algorithms for general similarity measures agglomerative versus divisive algorithms agglomerative = bottom-up build up clusters from single objects divisive
Knowledge-Based Organ Identification from CT Images. Masahara Kobashi and Linda Shapiro Best-Paper Prize in Pattern Recognition Vol. 28, No.
 Knowledge-Based Organ Identification from CT Images Masahara Kobashi and Linda Shapiro Best-Paper Prize in Pattern Recognition Vol. 28, No. 4 1995 1 Motivation The extraction of structure from CT volumes
Knowledge-Based Organ Identification from CT Images Masahara Kobashi and Linda Shapiro Best-Paper Prize in Pattern Recognition Vol. 28, No. 4 1995 1 Motivation The extraction of structure from CT volumes
Adaptive Model for Robust Pedestrian Counting
 Adaptive Model for Robust Pedestrian Counting Jingjing Liu, Jinqiao Wang, and Hanqing Lu National Laboratory of Pattern Recognition, Institute of Automation, Chinese Academy of Sciences {jjliu,jqwang,luhq}@nlpr.ia.ac.cn
Adaptive Model for Robust Pedestrian Counting Jingjing Liu, Jinqiao Wang, and Hanqing Lu National Laboratory of Pattern Recognition, Institute of Automation, Chinese Academy of Sciences {jjliu,jqwang,luhq}@nlpr.ia.ac.cn
Object Category Detection: Sliding Windows
 04/10/12 Object Category Detection: Sliding Windows Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical
04/10/12 Object Category Detection: Sliding Windows Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical
Harder case. Image matching. Even harder case. Harder still? by Diva Sian. by swashford
 Image matching Harder case by Diva Sian by Diva Sian by scgbt by swashford Even harder case Harder still? How the Afghan Girl was Identified by Her Iris Patterns Read the story NASA Mars Rover images Answer
Image matching Harder case by Diva Sian by Diva Sian by scgbt by swashford Even harder case Harder still? How the Afghan Girl was Identified by Her Iris Patterns Read the story NASA Mars Rover images Answer
Overview. Monte Carlo Methods. Statistics & Bayesian Inference Lecture 3. Situation At End Of Last Week
 Statistics & Bayesian Inference Lecture 3 Joe Zuntz Overview Overview & Motivation Metropolis Hastings Monte Carlo Methods Importance sampling Direct sampling Gibbs sampling Monte-Carlo Markov Chains Emcee
Statistics & Bayesian Inference Lecture 3 Joe Zuntz Overview Overview & Motivation Metropolis Hastings Monte Carlo Methods Importance sampling Direct sampling Gibbs sampling Monte-Carlo Markov Chains Emcee
Visuelle Perzeption für Mensch- Maschine Schnittstellen
 Visuelle Perzeption für Mensch- Maschine Schnittstellen Vorlesung, WS 2009 Prof. Dr. Rainer Stiefelhagen Dr. Edgar Seemann Institut für Anthropomatik Universität Karlsruhe (TH) http://cvhci.ira.uka.de
Visuelle Perzeption für Mensch- Maschine Schnittstellen Vorlesung, WS 2009 Prof. Dr. Rainer Stiefelhagen Dr. Edgar Seemann Institut für Anthropomatik Universität Karlsruhe (TH) http://cvhci.ira.uka.de
Mean shift based object tracking with accurate centroid estimation and adaptive Kernel bandwidth
 Mean shift based object tracking with accurate centroid estimation and adaptive Kernel bandwidth ShilpaWakode 1, Dr. Krishna Warhade 2, Dr. Vijay Wadhai 3, Dr. Nitin Choudhari 4 1234 Electronics department
Mean shift based object tracking with accurate centroid estimation and adaptive Kernel bandwidth ShilpaWakode 1, Dr. Krishna Warhade 2, Dr. Vijay Wadhai 3, Dr. Nitin Choudhari 4 1234 Electronics department
Robotics. CSPP Artificial Intelligence March 10, 2004
 Robotics CSPP 56553 Artificial Intelligence March 10, 2004 Roadmap Robotics is AI-complete Integration of many AI techniques Classic AI Search in configuration space (Ultra) Modern AI Subsumption architecture
Robotics CSPP 56553 Artificial Intelligence March 10, 2004 Roadmap Robotics is AI-complete Integration of many AI techniques Classic AI Search in configuration space (Ultra) Modern AI Subsumption architecture
Harder case. Image matching. Even harder case. Harder still? by Diva Sian. by swashford
 Image matching Harder case by Diva Sian by Diva Sian by scgbt by swashford Even harder case Harder still? How the Afghan Girl was Identified by Her Iris Patterns Read the story NASA Mars Rover images Answer
Image matching Harder case by Diva Sian by Diva Sian by scgbt by swashford Even harder case Harder still? How the Afghan Girl was Identified by Her Iris Patterns Read the story NASA Mars Rover images Answer
10703 Deep Reinforcement Learning and Control
 10703 Deep Reinforcement Learning and Control Russ Salakhutdinov Machine Learning Department rsalakhu@cs.cmu.edu Policy Gradient I Used Materials Disclaimer: Much of the material and slides for this lecture
10703 Deep Reinforcement Learning and Control Russ Salakhutdinov Machine Learning Department rsalakhu@cs.cmu.edu Policy Gradient I Used Materials Disclaimer: Much of the material and slides for this lecture
Clustering K-means. Machine Learning CSEP546 Carlos Guestrin University of Washington February 18, Carlos Guestrin
 Clustering K-means Machine Learning CSEP546 Carlos Guestrin University of Washington February 18, 2014 Carlos Guestrin 2005-2014 1 Clustering images Set of Images [Goldberger et al.] Carlos Guestrin 2005-2014
Clustering K-means Machine Learning CSEP546 Carlos Guestrin University of Washington February 18, 2014 Carlos Guestrin 2005-2014 1 Clustering images Set of Images [Goldberger et al.] Carlos Guestrin 2005-2014
Mining Social Network Graphs
 Mining Social Network Graphs Analysis of Large Graphs: Community Detection Rafael Ferreira da Silva rafsilva@isi.edu http://rafaelsilva.com Note to other teachers and users of these slides: We would be
Mining Social Network Graphs Analysis of Large Graphs: Community Detection Rafael Ferreira da Silva rafsilva@isi.edu http://rafaelsilva.com Note to other teachers and users of these slides: We would be
Large-scale Surveillance System based on Hybrid Cooperative Multi-Camera Tracking
 Open Journal of Applied Sciences, 2013, 3, 79-84 Published Online March 2013 (http://www.scirp.org/journal/ojapps) Large-scale Surveillance System based on Hybrid Cooperative Multi-Camera Tracking Xiao
Open Journal of Applied Sciences, 2013, 3, 79-84 Published Online March 2013 (http://www.scirp.org/journal/ojapps) Large-scale Surveillance System based on Hybrid Cooperative Multi-Camera Tracking Xiao
Segmentation and low-level grouping.
 Segmentation and low-level grouping. Bill Freeman, MIT 6.869 April 14, 2005 Readings: Mean shift paper and background segmentation paper. Mean shift IEEE PAMI paper by Comanici and Meer, http://www.caip.rutgers.edu/~comanici/papers/msrobustapproach.pdf
Segmentation and low-level grouping. Bill Freeman, MIT 6.869 April 14, 2005 Readings: Mean shift paper and background segmentation paper. Mean shift IEEE PAMI paper by Comanici and Meer, http://www.caip.rutgers.edu/~comanici/papers/msrobustapproach.pdf
A Real Time System for Detecting and Tracking People. Ismail Haritaoglu, David Harwood and Larry S. Davis. University of Maryland
 W 4 : Who? When? Where? What? A Real Time System for Detecting and Tracking People Ismail Haritaoglu, David Harwood and Larry S. Davis Computer Vision Laboratory University of Maryland College Park, MD
W 4 : Who? When? Where? What? A Real Time System for Detecting and Tracking People Ismail Haritaoglu, David Harwood and Larry S. Davis Computer Vision Laboratory University of Maryland College Park, MD
Spatial biosurveillance
 Spatial biosurveillance Authors of Slides Andrew Moore Carnegie Mellon awm@cs.cmu.edu Daniel Neill Carnegie Mellon d.neill@cs.cmu.edu Slides and Software and Papers at: http://www.autonlab.org awm@cs.cmu.edu
Spatial biosurveillance Authors of Slides Andrew Moore Carnegie Mellon awm@cs.cmu.edu Daniel Neill Carnegie Mellon d.neill@cs.cmu.edu Slides and Software and Papers at: http://www.autonlab.org awm@cs.cmu.edu
Tracking and Activity Analysis in Retail Environments Technical Report 620
 Tracking and Activity Analysis in Retail Environments Technical Report 620 Alex Leykin Indiana University, Bloomington, IN USA oleykin@indiana.edu Mihran Tuceryan Indiana University Purdue University,
Tracking and Activity Analysis in Retail Environments Technical Report 620 Alex Leykin Indiana University, Bloomington, IN USA oleykin@indiana.edu Mihran Tuceryan Indiana University Purdue University,
CS4670: Computer Vision
 CS4670: Computer Vision Noah Snavely Lecture 6: Feature matching and alignment Szeliski: Chapter 6.1 Reading Last time: Corners and blobs Scale-space blob detector: Example Feature descriptors We know
CS4670: Computer Vision Noah Snavely Lecture 6: Feature matching and alignment Szeliski: Chapter 6.1 Reading Last time: Corners and blobs Scale-space blob detector: Example Feature descriptors We know
Detecting Abandoned Luggage Items in a Public Space
 Detecting Abandoned Luggage Items in a Public Space Kevin Smith, Pedro Quelhas, and Daniel Gatica-Perez IDIAP Research Institute & École Polytechnique Fédérale de Lausanne (EPFL) Switzerland {smith, quelhas,
Detecting Abandoned Luggage Items in a Public Space Kevin Smith, Pedro Quelhas, and Daniel Gatica-Perez IDIAP Research Institute & École Polytechnique Fédérale de Lausanne (EPFL) Switzerland {smith, quelhas,
On Road Vehicle Detection using Shadows
 On Road Vehicle Detection using Shadows Gilad Buchman Grasp Lab, Department of Computer and Information Science School of Engineering University of Pennsylvania, Philadelphia, PA buchmag@seas.upenn.edu
On Road Vehicle Detection using Shadows Gilad Buchman Grasp Lab, Department of Computer and Information Science School of Engineering University of Pennsylvania, Philadelphia, PA buchmag@seas.upenn.edu
Idle Object Detection in Video for Banking ATM Applications
 Research Journal of Applied Sciences, Engineering and Technology 4(24): 5350-5356, 2012 ISSN: 2040-7467 Maxwell Scientific Organization, 2012 Submitted: March 18, 2012 Accepted: April 06, 2012 Published:
Research Journal of Applied Sciences, Engineering and Technology 4(24): 5350-5356, 2012 ISSN: 2040-7467 Maxwell Scientific Organization, 2012 Submitted: March 18, 2012 Accepted: April 06, 2012 Published:
Chapter 1. Introduction
 Chapter 1 Introduction A Monte Carlo method is a compuational method that uses random numbers to compute (estimate) some quantity of interest. Very often the quantity we want to compute is the mean of
Chapter 1 Introduction A Monte Carlo method is a compuational method that uses random numbers to compute (estimate) some quantity of interest. Very often the quantity we want to compute is the mean of
LEARNING TO SEGMENT MOVING OBJECTS IN VIDEOS FRAGKIADAKI ET AL. 2015
 LEARNING TO SEGMENT MOVING OBJECTS IN VIDEOS FRAGKIADAKI ET AL. 2015 Darshan Thaker Oct 4, 2017 Problem Statement Moving object segmentation in videos Applications: security tracking, pedestrian detection,
LEARNING TO SEGMENT MOVING OBJECTS IN VIDEOS FRAGKIADAKI ET AL. 2015 Darshan Thaker Oct 4, 2017 Problem Statement Moving object segmentation in videos Applications: security tracking, pedestrian detection,
Analysis Of Classification And Tracking In Vehicles Using Shape Based Features
 ISSN: 2278 0211 (Online) Analysis Of Classification And Tracking In Vehicles Using Shape Based Features Ravi Kumar Kota PG Student, Department Of ECE, LITAM Satenapalli, Guntur, Andhra Pradesh, India Chandra
ISSN: 2278 0211 (Online) Analysis Of Classification And Tracking In Vehicles Using Shape Based Features Ravi Kumar Kota PG Student, Department Of ECE, LITAM Satenapalli, Guntur, Andhra Pradesh, India Chandra
ETISEO, performance evaluation for video surveillance systems
 ETISEO, performance evaluation for video surveillance systems A. T. Nghiem, F. Bremond, M. Thonnat, V. Valentin Project Orion, INRIA - Sophia Antipolis France Abstract This paper presents the results of
ETISEO, performance evaluation for video surveillance systems A. T. Nghiem, F. Bremond, M. Thonnat, V. Valentin Project Orion, INRIA - Sophia Antipolis France Abstract This paper presents the results of
A Spatio-Spectral Algorithm for Robust and Scalable Object Tracking in Videos
 A Spatio-Spectral Algorithm for Robust and Scalable Object Tracking in Videos Alireza Tavakkoli 1, Mircea Nicolescu 2 and George Bebis 2,3 1 Computer Science Department, University of Houston-Victoria,
A Spatio-Spectral Algorithm for Robust and Scalable Object Tracking in Videos Alireza Tavakkoli 1, Mircea Nicolescu 2 and George Bebis 2,3 1 Computer Science Department, University of Houston-Victoria,
Fundamental Matrices from Moving Objects Using Line Motion Barcodes
 Fundamental Matrices from Moving Objects Using Line Motion Barcodes Yoni Kasten (B), Gil Ben-Artzi, Shmuel Peleg, and Michael Werman School of Computer Science and Engineering, The Hebrew University of
Fundamental Matrices from Moving Objects Using Line Motion Barcodes Yoni Kasten (B), Gil Ben-Artzi, Shmuel Peleg, and Michael Werman School of Computer Science and Engineering, The Hebrew University of
Defining a Better Vehicle Trajectory With GMM
 Santa Clara University Department of Computer Engineering COEN 281 Data Mining Professor Ming- Hwa Wang, Ph.D Winter 2016 Defining a Better Vehicle Trajectory With GMM Christiane Gregory Abe Millan Contents
Santa Clara University Department of Computer Engineering COEN 281 Data Mining Professor Ming- Hwa Wang, Ph.D Winter 2016 Defining a Better Vehicle Trajectory With GMM Christiane Gregory Abe Millan Contents
A Street Scene Surveillance System for Moving Object Detection, Tracking and Classification
 A Street Scene Surveillance System for Moving Object Detection, Tracking and Classification Huei-Yung Lin * and Juang-Yu Wei Department of Electrical Engineering National Chung Cheng University Chia-Yi
A Street Scene Surveillance System for Moving Object Detection, Tracking and Classification Huei-Yung Lin * and Juang-Yu Wei Department of Electrical Engineering National Chung Cheng University Chia-Yi
The Application of Image Processing to Solve Occlusion Issue in Object Tracking
 The Application of Image Processing to Solve Occlusion Issue in Object Tracking Yun Zhe Cheong 1 and Wei Jen Chew 1* 1 School of Engineering, Taylor s University, 47500 Subang Jaya, Selangor, Malaysia.
The Application of Image Processing to Solve Occlusion Issue in Object Tracking Yun Zhe Cheong 1 and Wei Jen Chew 1* 1 School of Engineering, Taylor s University, 47500 Subang Jaya, Selangor, Malaysia.
Shape from Silhouettes I
 Shape from Silhouettes I Guido Gerig CS 6320, Spring 2013 Credits: Marc Pollefeys, UNC Chapel Hill, some of the figures and slides are also adapted from J.S. Franco, J. Matusik s presentations, and referenced
Shape from Silhouettes I Guido Gerig CS 6320, Spring 2013 Credits: Marc Pollefeys, UNC Chapel Hill, some of the figures and slides are also adapted from J.S. Franco, J. Matusik s presentations, and referenced
Index. Guide. Camera Detect Event Guide. AcuraVision
 Index Guide of Camera Detect Events in AcuraVision How to use Motion Detection... 2 How to use Missing & Left Object Detection... 4 How to use Secure Zone Detection... 6 How to use Flow Counting feature...
Index Guide of Camera Detect Events in AcuraVision How to use Motion Detection... 2 How to use Missing & Left Object Detection... 4 How to use Secure Zone Detection... 6 How to use Flow Counting feature...
FAST HUMAN DETECTION USING TEMPLATE MATCHING FOR GRADIENT IMAGES AND ASC DESCRIPTORS BASED ON SUBTRACTION STEREO
 FAST HUMAN DETECTION USING TEMPLATE MATCHING FOR GRADIENT IMAGES AND ASC DESCRIPTORS BASED ON SUBTRACTION STEREO Makoto Arie, Masatoshi Shibata, Kenji Terabayashi, Alessandro Moro and Kazunori Umeda Course
FAST HUMAN DETECTION USING TEMPLATE MATCHING FOR GRADIENT IMAGES AND ASC DESCRIPTORS BASED ON SUBTRACTION STEREO Makoto Arie, Masatoshi Shibata, Kenji Terabayashi, Alessandro Moro and Kazunori Umeda Course
Optical Flow-Based Person Tracking by Multiple Cameras
 Proc. IEEE Int. Conf. on Multisensor Fusion and Integration in Intelligent Systems, Baden-Baden, Germany, Aug. 2001. Optical Flow-Based Person Tracking by Multiple Cameras Hideki Tsutsui, Jun Miura, and
Proc. IEEE Int. Conf. on Multisensor Fusion and Integration in Intelligent Systems, Baden-Baden, Germany, Aug. 2001. Optical Flow-Based Person Tracking by Multiple Cameras Hideki Tsutsui, Jun Miura, and
Outline. Data Association Scenarios. Data Association Scenarios. Data Association Scenarios
 Outline Data Association Scenarios Track Filtering and Gating Global Nearest Neighbor (GNN) Review: Linear Assignment Problem Murthy s k-best Assignments Algorithm Probabilistic Data Association (PDAF)
Outline Data Association Scenarios Track Filtering and Gating Global Nearest Neighbor (GNN) Review: Linear Assignment Problem Murthy s k-best Assignments Algorithm Probabilistic Data Association (PDAF)
INTERNATIONAL JOURNAL OF PURE AND APPLIED RESEARCH IN ENGINEERING AND TECHNOLOGY
 INTERNATIONAL JOURNAL OF PURE AND APPLIED RESEARCH IN ENGINEERING AND TECHNOLOGY A PATH FOR HORIZING YOUR INNOVATIVE WORK REVIEW PAPER ON VIDEO IMAGE ENHANCEMENT AND OBJECT TRACKING IN LOW RESOLUTION MS.
INTERNATIONAL JOURNAL OF PURE AND APPLIED RESEARCH IN ENGINEERING AND TECHNOLOGY A PATH FOR HORIZING YOUR INNOVATIVE WORK REVIEW PAPER ON VIDEO IMAGE ENHANCEMENT AND OBJECT TRACKING IN LOW RESOLUTION MS.
A Low Power, High Throughput, Fully Event-Based Stereo System: Supplementary Documentation
 A Low Power, High Throughput, Fully Event-Based Stereo System: Supplementary Documentation Alexander Andreopoulos, Hirak J. Kashyap, Tapan K. Nayak, Arnon Amir, Myron D. Flickner IBM Research March 25,
A Low Power, High Throughput, Fully Event-Based Stereo System: Supplementary Documentation Alexander Andreopoulos, Hirak J. Kashyap, Tapan K. Nayak, Arnon Amir, Myron D. Flickner IBM Research March 25,
Fully Automatic Methodology for Human Action Recognition Incorporating Dynamic Information
 Fully Automatic Methodology for Human Action Recognition Incorporating Dynamic Information Ana González, Marcos Ortega Hortas, and Manuel G. Penedo University of A Coruña, VARPA group, A Coruña 15071,
Fully Automatic Methodology for Human Action Recognition Incorporating Dynamic Information Ana González, Marcos Ortega Hortas, and Manuel G. Penedo University of A Coruña, VARPA group, A Coruña 15071,
3. International Conference on Face and Gesture Recognition, April 14-16, 1998, Nara, Japan 1. A Real Time System for Detecting and Tracking People
 3. International Conference on Face and Gesture Recognition, April 14-16, 1998, Nara, Japan 1 W 4 : Who? When? Where? What? A Real Time System for Detecting and Tracking People Ismail Haritaoglu, David
3. International Conference on Face and Gesture Recognition, April 14-16, 1998, Nara, Japan 1 W 4 : Who? When? Where? What? A Real Time System for Detecting and Tracking People Ismail Haritaoglu, David
Multi-Modal Metropolis Nested Sampling For Inspiralling Binaries
 Multi-Modal Metropolis Nested Sampling For Inspiralling Binaries Ed Porter (AEI) & Jon Gair (IOA) 2W@AEI Workshop AEI September 2008 (We acknowledge useful converstions with F. Feroz and M. Hobson (Cavendish
Multi-Modal Metropolis Nested Sampling For Inspiralling Binaries Ed Porter (AEI) & Jon Gair (IOA) 2W@AEI Workshop AEI September 2008 (We acknowledge useful converstions with F. Feroz and M. Hobson (Cavendish
Detecting Pedestrians Using Patterns of Motion and Appearance
 Detecting Pedestrians Using Patterns of Motion and Appearance Paul Viola Michael J. Jones Daniel Snow Microsoft Research Mitsubishi Electric Research Labs Mitsubishi Electric Research Labs viola@microsoft.com
Detecting Pedestrians Using Patterns of Motion and Appearance Paul Viola Michael J. Jones Daniel Snow Microsoft Research Mitsubishi Electric Research Labs Mitsubishi Electric Research Labs viola@microsoft.com
Tracking and Recognizing People in Colour using the Earth Mover s Distance
 Tracking and Recognizing People in Colour using the Earth Mover s Distance DANIEL WOJTASZEK, ROBERT LAGANIÈRE S.I.T.E. University of Ottawa, Ottawa, Ontario, Canada K1N 6N5 danielw@site.uottawa.ca, laganier@site.uottawa.ca
Tracking and Recognizing People in Colour using the Earth Mover s Distance DANIEL WOJTASZEK, ROBERT LAGANIÈRE S.I.T.E. University of Ottawa, Ottawa, Ontario, Canada K1N 6N5 danielw@site.uottawa.ca, laganier@site.uottawa.ca