Level-set MCMC Curve Sampling and Geometric Conditional Simulation
|
|
|
- Beatrix Lee
- 5 years ago
- Views:
Transcription
1 Level-set MCMC Curve Sampling and Geometric Conditional Simulation Ayres Fan John W. Fisher III Alan S. Willsky February 16, 2007
2 Outline 1. Overview 2. Curve evolution 3. Markov chain Monte Carlo 4. Curve sampling 5. Conditional simulation D Segmentation 2
3 Overview Curve evolution attempts to find a curve C (or curves C i ) that best segment an image (according to some model) Goal is to minimize an energy functional E(C) (view as a negative log likelihood) Find a local minimum using gradient descent 3
4 Sampling instead of optimization Draw multiple samples from a probability distribution p (e.g., uniform, Gaussian) Advantages: Naturally handles multi-modal distributions Can get out of local minima Higher-order statistics (e.g., variances) Conditional simulation 4
5 Outline 1. Overview 2. Curve evolution 3. Markov chain Monte Carlo 4. Curve sampling 5. Conditional simulation D Segmentation 5
6 Planar curves A curve is a function We wish to minimize an energy functional with a data fidelity term and regularization term: This results in a gradient flow: We can write any flow in terms of the normal: 6
7 Euclidean curve shortening flow Let This energy functional is smaller when C is shorter Gradient flow is direction that minimizes the curve length the fastest Use Euler-Lagrange and we see where κ is curvature, N is the outward normal 7
8 Level-Set Methods A curve is a function (infinite dimensional) A natural implementation approach is to use marker points on the boundary (snakes) Reinitialization issues Difficulty handling topological change Level set methods instead evolve a surface (one dimension higher than our curve) whose zeroth level set is the curve (Sethian and Osher) 8



9 Embedding the curve Force level set Ψ to be zero on the curve Chain rule gives us 9
10 Popular energy functionals Geodesic active contours (Caselles et al.): Separating the means (Yezzi et al.): Piecewise constant intensities (Chan and Vese): 10
11 Examples-I 11
12 Examples-II 12
13 Outline 1. Overview 2. Curve evolution 3. Markov chain Monte Carlo 4. Curve sampling 5. Conditional simulation D Segmentation 13
14 General MAP Model For segmentation: x is a curve y is the observed image (can be vector) S is a shape model Data model usually IID given the curve We wish to sample from p(x y;s), but cannot do so directly 14
15 Markov Chain Monte Carlo Class of sampling methods that iteratively generate candidates based on a previous iterate (forming a Markov chain) Instead of sampling from p(x y;s), sample from a proposal distribution q and keep samples according to an acceptance rule a Examples include Gibbs sampling, Metropolis-Hastings 15
16 Metropolis-Hastings Metropolis-Hastings algorithm: 1. Start with x 0 2. At time t, generate candidate ϕ t (given x t-1 ) 3. Calculate Hastings ratio: 4. Set x t = ϕ t with probability min(1, r t ), otherwise x t = x t-1 5. Go back to 2 16
17 Asymptotic Convergence We want to form a Markov chain such that its stationary distribution is p(x): To guarantee asymptotic convergence, sufficient conditions are: 1) Ergodicity 2) Detailed balance 17
18 Outline 1. Overview 2. Curve evolution 3. Markov chain Monte Carlo 4. Curve sampling 5. Conditional simulation D Segmentation 18
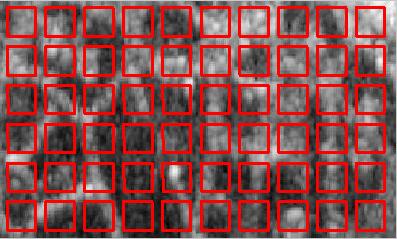
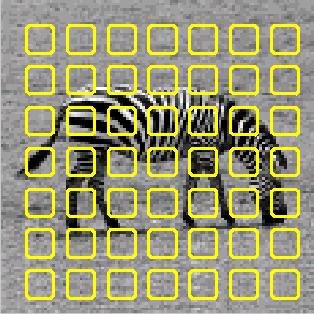
19 MCMC Curve Sampling Generate perturbation on the curve: Sample by adding smooth random fields: Σ controls the degree of smoothness in field Note for portions where f is negative, shocks may develop (so called prairie fire model) Implement using white noise and circular convolution 19
20 Smoothness issues While detailed balance assures asymptotic convergence, may need to wait a very long time In this case, smooth curves have non-zero probability under q, but are very unlikely to occur Can view accumulation of perturbations as (h is the smoothing kernel, n i is white noise) Solution: make q more likely to move towards high-probability regions of p 20
21 Adding mean force We can add deterministic elements to f (i.e., a mean to q): The average behavior should then be to move towards higherprobability areas of p In the limit, setting f to be the gradient flow of the energy functional results in always accepting the perturbation 21
22 Coverage/Detailed balance It is easy to show we can go from any curve C 1 to any other curve C 2 (shrink to a point) For detailed balance, we need to compute probability of generating C from C (and vice versa) Probability of going from C to C is the probability of generating f (which is Gaussian) and the reverse is the probability of f (also Gaussian) 22
23 Approximations to q Relationship between f and f complicated due to the fact that the normal function changes f does not always exists (given an f). Unknown what conditions on f are necessary to guarantee existence. Various levels of exactness Assume (then f = -f ) Locally-linear approximation Trace along (technical issues) Unknown how approximations affect convergence 23
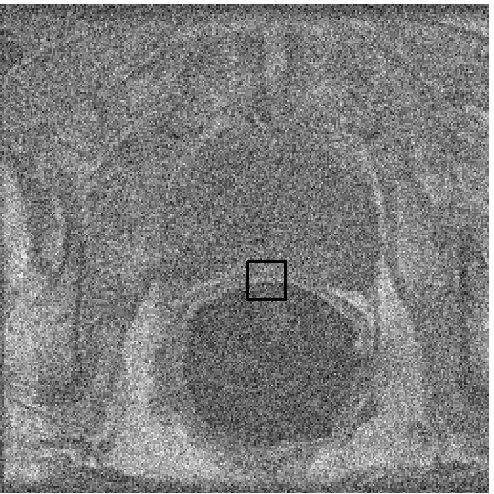
24 Synthetic noisy image Piecewise-constant observation model: Chan-Vese energy functional: Probability distribution (T=2σ 2 ): 24

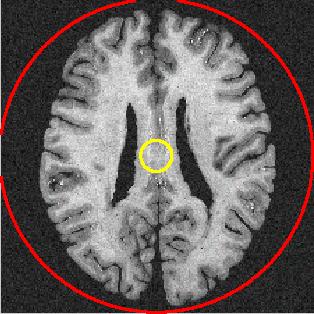
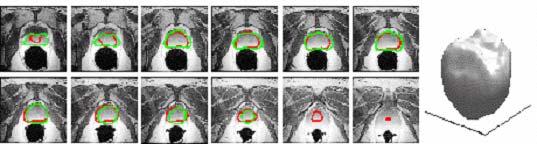
25 Prostate in a Haystack 25

26 Most likely samples 26
27 Least likely samples 27
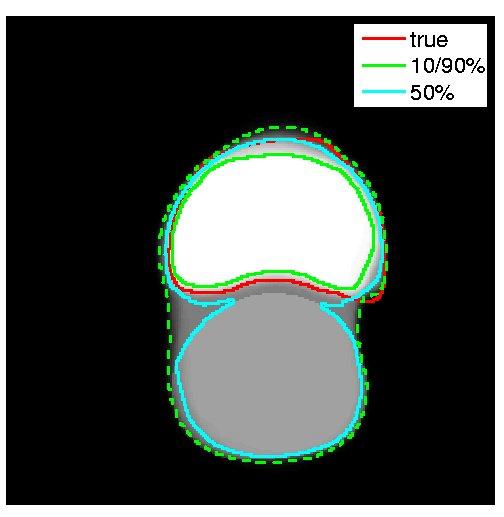
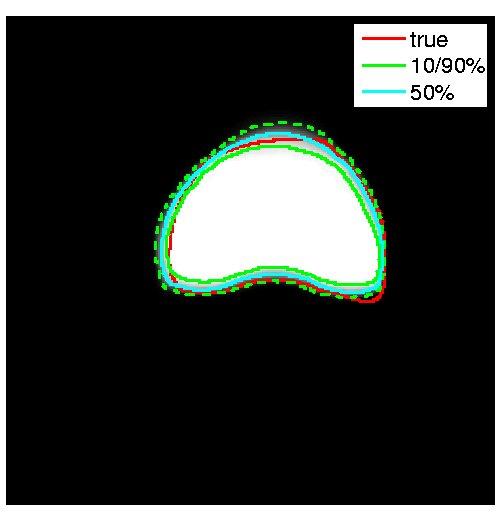
28 Confidence intervals 28
29 When best is not best In this example, the most likely samples under the model are not the most accurate according to the underlying truth 10%/90% confidence bands do a good job of enclosing the true answer Histogram image tells us more uncertainty in upper-right corner Median curve is quite close to the true curve Optimization would result in subpar results 29

30 Bias-corrected prostate Expert segmentation, add noise (simulate body coil image) 30
31 Learn probability densities Use histograms Learn pdf inside p(y 1) and pdf outside p(y 0) and assume iid given curve: 31
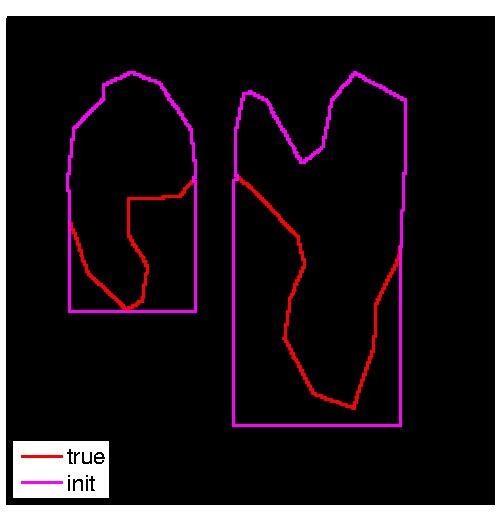
32 Initialization 32

33 Results 33
34 Prostate-only cluster 34
35 Multimodality and convergence Natural multimodal distribution When starting near one mode, need a lot of time to traverse valley between modes Clustering helps with presenting results Interesting work to be done in learning dimensionality of manifold and local approximations 35
36 Outline 1. Overview 2. Curve evolution 3. Markov chain Monte Carlo 4. Curve sampling 5. Conditional simulation D Segmentation 36
37 User Information In many problems, the model admits many reasonable solutions Currently user input largely limited to initialization We can use user information to reduce the number of reasonable solutions Regions of inclusion or exclusion Partial segmentations Can help with both convergence speed and accuracy Interactive segmentation 37
38 Conditional simulation With conditional simulation, we are given the values on a subset of the variables We then wish to generate sample paths that fill in the remainder of the variables (e.g., simulating Brownian motion) 38
39 Simulating curves Say we are given C s, a subset of C (with some uncertainty associated with it) We wish to sample the unknown part of the curve C u One way to view is as sampling from: Difficulty is being able to evaluate the middle term as theoretically need to integrate p(c) 39
40 Simplifying Cases For special cases, evaluation of is tractable: 1. When C is low-dimensional (can do analytical integration or Monte-Carlo integration) 2. When C s is assumed to be exact 3. When p(c) has special form (e.g., independent, Markov) 4. When willing to approximate When implementing conditional simulation, modify q to be compatible with new conditional probability 40
41 Gravity inversion Supplement to standard seismic data to segment bottom salt using an array of surface gravimeters (~10-15 N accuracy) Subtract base effects (geoid, centrifugal force, etc.) to leave salt effects: Assume constant density inside and outside: Model energy as L2 estimation error (probability as Boltzmann distribution): 41
42 A strange segmentation problem X- and z- components of gravity profile for synthetic salt body 42
43 Circle salt 43
44 Most likely samples 44
45 Least likely samples 45
46 Confidence intervals 46
47 Notable features Measurement points << image pixels, but we can do a reasonable job Much higher uncertainty at the bottom than the top (weaker measurements) Less uncertainty in middle than on sides Median of histogram not necessarily related to median of distribution 47
48 More complex example Same x- and z- components of gravity Synthetic image with more complex geometry 48
49 Initialization 49


50 Most likely samples Regular Conditionally simulated 50
51 Marginal confidence bounds Regular Conditionally simulated 51
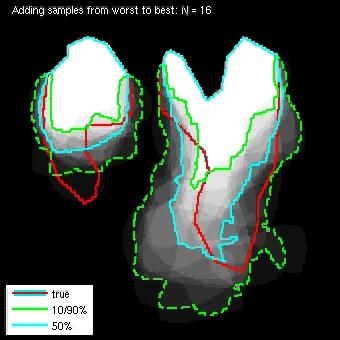
52 Aggregating samples 52
53 Outline 1. Overview 2. Curve evolution 3. Markov chain Monte Carlo 4. Curve sampling 5. Conditional simulation D Segmentation 53
54 Chan-Vese in 3D Energy functional with surface area regularization: With a slice-based model, we can write the regularization term as: where is the surface between c i and c i+1 54
55 Zero-order hold approximation Approximate volume as piecewise-constant cylinders : Then we see that the surface areas are: We see terms related to the curve length and the difference between neighboring slices Upper bound to correct surface area 55
56 Overall regularization term Adding everything together results in: self potentials edge potentials 56
57 2.5D Approach In 3D world, natural (or built-in) partition of volumes into slices Assume Markov relationship among slices Then have local potentials (e.g., PCA) and edge potentials (coupling between slices) Naturally lends itself to local Metropolis-Hastings approach (iterating over the slices) 57


58 2.5D Model We can model this as a simple chain structure with pairwise interactions This admits the following factorization: 58

59 Partial segmentations Assume that we are given segmentations of every other slice We now want to sample surfaces conditioned on the fact that certain slices are fixed Markovianity tells us that c 2 and c 4 are independent conditioned on c 3 59
60 Log probability for c 2 We can then construct the probability for c 2 conditioned on its neighbors using the potential functions defined previously: 60
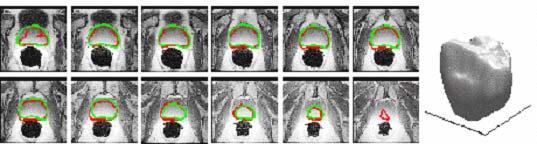
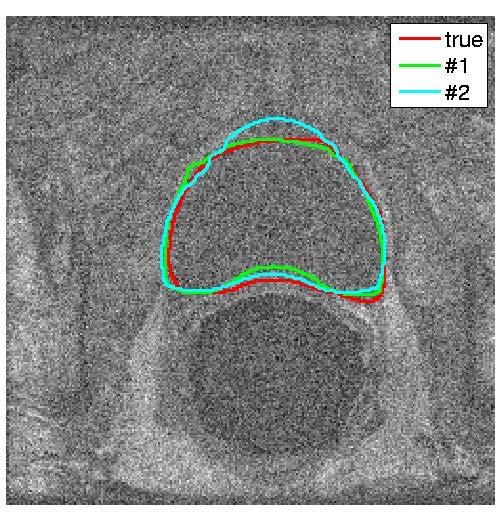
 with expert (green)")
61 Results Neighbor segmentations Our result (cyan) with expert (green) 61
62 Larger spacing Apply local Metropolis-Hastings algorithm where we sample on a slice-by-slice basis Theory shows that asymptotic convergence is unchanged Unfortunately larger spacing similar to less regularization Currently have issues with poor data models that need to be resolved 62
63 Full 3D In medical imaging, have multiple slice orientations (axial, sagittal, coronal) In seismic, vertical and horizontal shape structure expected With a 2.5D approach, this introduces complexity to the graph structure 63

64 Incorporating perpendicular slices c is now coupled to all of the horizontal slices c only gives information on a subset of each slice Specify edge potentials as, e.g.: 64
65 Other extensions Additional features can be added to the base model: Uncertainty on the expert segmentations Shape models (semi-local) Exclusion/inclusion regions Topological change (through level sets) 65
66 Conclusion Computationally feasible algorithm to sample from space of curves Approximate detailed balance Demonstrated utility for robustness to noise, multimodal distributions, displaying uncertainty Can generate arbitrary shapes with relatively complex geometry Conditional simulation provides a natural framework to incorporate partial user segmentations on a slice-by-slice level 66
67 Further research Multiple curves, known/unknown topology We would like q to naturally sample from space of smooth curves (different perturbation structure) Speed always an issue for MCMC approaches Multiresolution perturbations Parameterized perturbations (efficient basis) Hierarchical models Using samples to explore the geometry of shape manifolds 67

68 Smooth curve + smooth perturbations smooth curve 68
69 SAD Target We define symmetric area difference (SAD) as: Use a Boltzmann distribution: T is a parameter we can use to control how likely we are to keep less likely samples We will keep a sample with T log(2) additional errors with probability ½ Single mode distribution 69

70 Target Shape 70
71 Initialization 71
72 Most likely samples 72
73 Least likely samples 73
74 Confidence intervals 74
75 Doubling the temperature 75

76 Results 76
Curve Sampling and Geometric Conditional Simulation
 Curve Sampling and Geometric Conditional Simulation Ayres Fan Joint work with John Fisher, William Wells, Jonathan Kane, and Alan Willsky S S G Massachusetts Institute of Technology September 19, 2007
Curve Sampling and Geometric Conditional Simulation Ayres Fan Joint work with John Fisher, William Wells, Jonathan Kane, and Alan Willsky S S G Massachusetts Institute of Technology September 19, 2007
Mesh segmentation. Florent Lafarge Inria Sophia Antipolis - Mediterranee
 Mesh segmentation Florent Lafarge Inria Sophia Antipolis - Mediterranee Outline What is mesh segmentation? M = {V,E,F} is a mesh S is either V, E or F (usually F) A Segmentation is a set of sub-meshes
Mesh segmentation Florent Lafarge Inria Sophia Antipolis - Mediterranee Outline What is mesh segmentation? M = {V,E,F} is a mesh S is either V, E or F (usually F) A Segmentation is a set of sub-meshes
GAMES Webinar: Rendering Tutorial 2. Monte Carlo Methods. Shuang Zhao
 GAMES Webinar: Rendering Tutorial 2 Monte Carlo Methods Shuang Zhao Assistant Professor Computer Science Department University of California, Irvine GAMES Webinar Shuang Zhao 1 Outline 1. Monte Carlo integration
GAMES Webinar: Rendering Tutorial 2 Monte Carlo Methods Shuang Zhao Assistant Professor Computer Science Department University of California, Irvine GAMES Webinar Shuang Zhao 1 Outline 1. Monte Carlo integration
Chapter 1. Introduction
 Chapter 1 Introduction A Monte Carlo method is a compuational method that uses random numbers to compute (estimate) some quantity of interest. Very often the quantity we want to compute is the mean of
Chapter 1 Introduction A Monte Carlo method is a compuational method that uses random numbers to compute (estimate) some quantity of interest. Very often the quantity we want to compute is the mean of
MCMC Curve Sampling for Image Segmentation
 MCMC Curve Sampling for Image Segmentation Ayres C. Fan 1,JohnW.FisherIII 1,2, William M. Wells III 2,3, James J. Levitt 3,4, and Alan S. Willsky 1 1 Laboratory for Information and Decision Systems, MIT,
MCMC Curve Sampling for Image Segmentation Ayres C. Fan 1,JohnW.FisherIII 1,2, William M. Wells III 2,3, James J. Levitt 3,4, and Alan S. Willsky 1 1 Laboratory for Information and Decision Systems, MIT,
Curve Sampling and Geometric Conditional Simulation
 Curve Sampling and Geometric Conditional Simulation by Ayres C. Fan B.S., Electrical Engineering University of Minnesota, 2000 S.M., Electrical Engineering and Computer Science Massachusetts Institute
Curve Sampling and Geometric Conditional Simulation by Ayres C. Fan B.S., Electrical Engineering University of Minnesota, 2000 S.M., Electrical Engineering and Computer Science Massachusetts Institute
MCMC Shape Sampling for Image Segmentation with Nonparametric Shape Priors
 MCMC Shape Sampling for Image Segmentation with Nonparametric Shape Priors Ertunc Erdil, Sinan Yıldırım, Müjdat Çetin Sabanci University, Tuzla 34956, Istanbul, Turkey {ertuncerdil, sinanyildirim, mcetin}@sabanciuniv.edu
MCMC Shape Sampling for Image Segmentation with Nonparametric Shape Priors Ertunc Erdil, Sinan Yıldırım, Müjdat Çetin Sabanci University, Tuzla 34956, Istanbul, Turkey {ertuncerdil, sinanyildirim, mcetin}@sabanciuniv.edu
Markov chain Monte Carlo methods
 Markov chain Monte Carlo methods (supplementary material) see also the applet http://www.lbreyer.com/classic.html February 9 6 Independent Hastings Metropolis Sampler Outline Independent Hastings Metropolis
Markov chain Monte Carlo methods (supplementary material) see also the applet http://www.lbreyer.com/classic.html February 9 6 Independent Hastings Metropolis Sampler Outline Independent Hastings Metropolis
An Introduction to Markov Chain Monte Carlo
 An Introduction to Markov Chain Monte Carlo Markov Chain Monte Carlo (MCMC) refers to a suite of processes for simulating a posterior distribution based on a random (ie. monte carlo) process. In other
An Introduction to Markov Chain Monte Carlo Markov Chain Monte Carlo (MCMC) refers to a suite of processes for simulating a posterior distribution based on a random (ie. monte carlo) process. In other
Convexization in Markov Chain Monte Carlo
 in Markov Chain Monte Carlo 1 IBM T. J. Watson Yorktown Heights, NY 2 Department of Aerospace Engineering Technion, Israel August 23, 2011 Problem Statement MCMC processes in general are governed by non
in Markov Chain Monte Carlo 1 IBM T. J. Watson Yorktown Heights, NY 2 Department of Aerospace Engineering Technion, Israel August 23, 2011 Problem Statement MCMC processes in general are governed by non
Level Set Evolution without Reinitilization
 Level Set Evolution without Reinitilization Outline Parametric active contour (snake) models. Concepts of Level set method and geometric active contours. A level set formulation without reinitialization.
Level Set Evolution without Reinitilization Outline Parametric active contour (snake) models. Concepts of Level set method and geometric active contours. A level set formulation without reinitialization.
IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 17, NO. 5, MAY
 IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 17, NO. 5, MAY 2008 645 A Real-Time Algorithm for the Approximation of Level-Set-Based Curve Evolution Yonggang Shi, Member, IEEE, and William Clem Karl, Senior
IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 17, NO. 5, MAY 2008 645 A Real-Time Algorithm for the Approximation of Level-Set-Based Curve Evolution Yonggang Shi, Member, IEEE, and William Clem Karl, Senior
MCMC Methods for data modeling
 MCMC Methods for data modeling Kenneth Scerri Department of Automatic Control and Systems Engineering Introduction 1. Symposium on Data Modelling 2. Outline: a. Definition and uses of MCMC b. MCMC algorithms
MCMC Methods for data modeling Kenneth Scerri Department of Automatic Control and Systems Engineering Introduction 1. Symposium on Data Modelling 2. Outline: a. Definition and uses of MCMC b. MCMC algorithms
Active Geodesics: Region-based Active Contour Segmentation with a Global Edge-based Constraint
 Active Geodesics: Region-based Active Contour Segmentation with a Global Edge-based Constraint Vikram Appia Anthony Yezzi Georgia Institute of Technology, Atlanta, GA, USA. Abstract We present an active
Active Geodesics: Region-based Active Contour Segmentation with a Global Edge-based Constraint Vikram Appia Anthony Yezzi Georgia Institute of Technology, Atlanta, GA, USA. Abstract We present an active
Efficient Feature Learning Using Perturb-and-MAP
 Efficient Feature Learning Using Perturb-and-MAP Ke Li, Kevin Swersky, Richard Zemel Dept. of Computer Science, University of Toronto {keli,kswersky,zemel}@cs.toronto.edu Abstract Perturb-and-MAP [1] is
Efficient Feature Learning Using Perturb-and-MAP Ke Li, Kevin Swersky, Richard Zemel Dept. of Computer Science, University of Toronto {keli,kswersky,zemel}@cs.toronto.edu Abstract Perturb-and-MAP [1] is
Stochastic Function Norm Regularization of DNNs
 Stochastic Function Norm Regularization of DNNs Amal Rannen Triki Dept. of Computational Science and Engineering Yonsei University Seoul, South Korea amal.rannen@yonsei.ac.kr Matthew B. Blaschko Center
Stochastic Function Norm Regularization of DNNs Amal Rannen Triki Dept. of Computational Science and Engineering Yonsei University Seoul, South Korea amal.rannen@yonsei.ac.kr Matthew B. Blaschko Center
MR IMAGE SEGMENTATION
 MR IMAGE SEGMENTATION Prepared by : Monil Shah What is Segmentation? Partitioning a region or regions of interest in images such that each region corresponds to one or more anatomic structures Classification
MR IMAGE SEGMENTATION Prepared by : Monil Shah What is Segmentation? Partitioning a region or regions of interest in images such that each region corresponds to one or more anatomic structures Classification
Quantitative Biology II!
 Quantitative Biology II! Lecture 3: Markov Chain Monte Carlo! March 9, 2015! 2! Plan for Today!! Introduction to Sampling!! Introduction to MCMC!! Metropolis Algorithm!! Metropolis-Hastings Algorithm!!
Quantitative Biology II! Lecture 3: Markov Chain Monte Carlo! March 9, 2015! 2! Plan for Today!! Introduction to Sampling!! Introduction to MCMC!! Metropolis Algorithm!! Metropolis-Hastings Algorithm!!
Markov Random Fields and Gibbs Sampling for Image Denoising
 Markov Random Fields and Gibbs Sampling for Image Denoising Chang Yue Electrical Engineering Stanford University changyue@stanfoed.edu Abstract This project applies Gibbs Sampling based on different Markov
Markov Random Fields and Gibbs Sampling for Image Denoising Chang Yue Electrical Engineering Stanford University changyue@stanfoed.edu Abstract This project applies Gibbs Sampling based on different Markov
ADAPTIVE METROPOLIS-HASTINGS SAMPLING, OR MONTE CARLO KERNEL ESTIMATION
 ADAPTIVE METROPOLIS-HASTINGS SAMPLING, OR MONTE CARLO KERNEL ESTIMATION CHRISTOPHER A. SIMS Abstract. A new algorithm for sampling from an arbitrary pdf. 1. Introduction Consider the standard problem of
ADAPTIVE METROPOLIS-HASTINGS SAMPLING, OR MONTE CARLO KERNEL ESTIMATION CHRISTOPHER A. SIMS Abstract. A new algorithm for sampling from an arbitrary pdf. 1. Introduction Consider the standard problem of
Automated Segmentation Using a Fast Implementation of the Chan-Vese Models
 Automated Segmentation Using a Fast Implementation of the Chan-Vese Models Huan Xu, and Xiao-Feng Wang,,3 Intelligent Computation Lab, Hefei Institute of Intelligent Machines, Chinese Academy of Science,
Automated Segmentation Using a Fast Implementation of the Chan-Vese Models Huan Xu, and Xiao-Feng Wang,,3 Intelligent Computation Lab, Hefei Institute of Intelligent Machines, Chinese Academy of Science,
Theoretical Concepts of Machine Learning
 Theoretical Concepts of Machine Learning Part 2 Institute of Bioinformatics Johannes Kepler University, Linz, Austria Outline 1 Introduction 2 Generalization Error 3 Maximum Likelihood 4 Noise Models 5
Theoretical Concepts of Machine Learning Part 2 Institute of Bioinformatics Johannes Kepler University, Linz, Austria Outline 1 Introduction 2 Generalization Error 3 Maximum Likelihood 4 Noise Models 5
CRF Based Point Cloud Segmentation Jonathan Nation
 CRF Based Point Cloud Segmentation Jonathan Nation jsnation@stanford.edu 1. INTRODUCTION The goal of the project is to use the recently proposed fully connected conditional random field (CRF) model to
CRF Based Point Cloud Segmentation Jonathan Nation jsnation@stanford.edu 1. INTRODUCTION The goal of the project is to use the recently proposed fully connected conditional random field (CRF) model to
1486 IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 14, NO. 10, OCTOBER 2005
 1486 IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 14, NO. 10, OCTOBER 2005 A Nonparametric Statistical Method for Image Segmentation Using Information Theory and Curve Evolution Junmo Kim, Member, IEEE,
1486 IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 14, NO. 10, OCTOBER 2005 A Nonparametric Statistical Method for Image Segmentation Using Information Theory and Curve Evolution Junmo Kim, Member, IEEE,
CS334: Digital Imaging and Multimedia Edges and Contours. Ahmed Elgammal Dept. of Computer Science Rutgers University
 CS334: Digital Imaging and Multimedia Edges and Contours Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines What makes an edge? Gradient-based edge detection Edge Operators From Edges
CS334: Digital Imaging and Multimedia Edges and Contours Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines What makes an edge? Gradient-based edge detection Edge Operators From Edges
Global Minimization of the Active Contour Model with TV-Inpainting and Two-Phase Denoising
 Global Minimization of the Active Contour Model with TV-Inpainting and Two-Phase Denoising Shingyu Leung and Stanley Osher Department of Mathematics, UCLA, Los Angeles, CA 90095, USA {syleung, sjo}@math.ucla.edu
Global Minimization of the Active Contour Model with TV-Inpainting and Two-Phase Denoising Shingyu Leung and Stanley Osher Department of Mathematics, UCLA, Los Angeles, CA 90095, USA {syleung, sjo}@math.ucla.edu
CS534: Introduction to Computer Vision Edges and Contours. Ahmed Elgammal Dept. of Computer Science Rutgers University
 CS534: Introduction to Computer Vision Edges and Contours Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines What makes an edge? Gradient-based edge detection Edge Operators Laplacian
CS534: Introduction to Computer Vision Edges and Contours Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines What makes an edge? Gradient-based edge detection Edge Operators Laplacian
10.4 Linear interpolation method Newton s method
 10.4 Linear interpolation method The next best thing one can do is the linear interpolation method, also known as the double false position method. This method works similarly to the bisection method by
10.4 Linear interpolation method The next best thing one can do is the linear interpolation method, also known as the double false position method. This method works similarly to the bisection method by
Variational Methods II
 Mathematical Foundations of Computer Graphics and Vision Variational Methods II Luca Ballan Institute of Visual Computing Last Lecture If we have a topological vector space with an inner product and functionals
Mathematical Foundations of Computer Graphics and Vision Variational Methods II Luca Ballan Institute of Visual Computing Last Lecture If we have a topological vector space with an inner product and functionals
weighted minimal surface model for surface reconstruction from scattered points, curves, and/or pieces of surfaces.
 weighted minimal surface model for surface reconstruction from scattered points, curves, and/or pieces of surfaces. joint work with (S. Osher, R. Fedkiw and M. Kang) Desired properties for surface reconstruction:
weighted minimal surface model for surface reconstruction from scattered points, curves, and/or pieces of surfaces. joint work with (S. Osher, R. Fedkiw and M. Kang) Desired properties for surface reconstruction:
Filtering Images. Contents
 Image Processing and Data Visualization with MATLAB Filtering Images Hansrudi Noser June 8-9, 010 UZH, Multimedia and Robotics Summer School Noise Smoothing Filters Sigmoid Filters Gradient Filters Contents
Image Processing and Data Visualization with MATLAB Filtering Images Hansrudi Noser June 8-9, 010 UZH, Multimedia and Robotics Summer School Noise Smoothing Filters Sigmoid Filters Gradient Filters Contents
Dr. Ulas Bagci
 Lecture 9: Deformable Models and Segmentation CAP-Computer Vision Lecture 9-Deformable Models and Segmentation Dr. Ulas Bagci bagci@ucf.edu Lecture 9: Deformable Models and Segmentation Motivation A limitation
Lecture 9: Deformable Models and Segmentation CAP-Computer Vision Lecture 9-Deformable Models and Segmentation Dr. Ulas Bagci bagci@ucf.edu Lecture 9: Deformable Models and Segmentation Motivation A limitation
SCIENCE & TECHNOLOGY
 Pertanika J. Sci. & Technol. 26 (1): 309-316 (2018) SCIENCE & TECHNOLOGY Journal homepage: http://www.pertanika.upm.edu.my/ Application of Active Contours Driven by Local Gaussian Distribution Fitting
Pertanika J. Sci. & Technol. 26 (1): 309-316 (2018) SCIENCE & TECHNOLOGY Journal homepage: http://www.pertanika.upm.edu.my/ Application of Active Contours Driven by Local Gaussian Distribution Fitting
Markov Chain Monte Carlo (part 1)
") Markov Chain Monte Carlo (part 1) Edps 590BAY Carolyn J. Anderson Department of Educational Psychology c Board of Trustees, University of Illinois Spring 2018 Depending on the book that you select for
Markov Chain Monte Carlo (part 1) Edps 590BAY Carolyn J. Anderson Department of Educational Psychology c Board of Trustees, University of Illinois Spring 2018 Depending on the book that you select for
Graphical Models, Bayesian Method, Sampling, and Variational Inference
 Graphical Models, Bayesian Method, Sampling, and Variational Inference With Application in Function MRI Analysis and Other Imaging Problems Wei Liu Scientific Computing and Imaging Institute University
Graphical Models, Bayesian Method, Sampling, and Variational Inference With Application in Function MRI Analysis and Other Imaging Problems Wei Liu Scientific Computing and Imaging Institute University
Overview. Monte Carlo Methods. Statistics & Bayesian Inference Lecture 3. Situation At End Of Last Week
 Statistics & Bayesian Inference Lecture 3 Joe Zuntz Overview Overview & Motivation Metropolis Hastings Monte Carlo Methods Importance sampling Direct sampling Gibbs sampling Monte-Carlo Markov Chains Emcee
Statistics & Bayesian Inference Lecture 3 Joe Zuntz Overview Overview & Motivation Metropolis Hastings Monte Carlo Methods Importance sampling Direct sampling Gibbs sampling Monte-Carlo Markov Chains Emcee
NIH Public Access Author Manuscript Proc Soc Photo Opt Instrum Eng. Author manuscript; available in PMC 2014 October 07.
 NIH Public Access Author Manuscript Published in final edited form as: Proc Soc Photo Opt Instrum Eng. 2014 March 21; 9034: 903442. doi:10.1117/12.2042915. MRI Brain Tumor Segmentation and Necrosis Detection
NIH Public Access Author Manuscript Published in final edited form as: Proc Soc Photo Opt Instrum Eng. 2014 March 21; 9034: 903442. doi:10.1117/12.2042915. MRI Brain Tumor Segmentation and Necrosis Detection
Markov Chain Monte Carlo Shape Sampling using Level Sets
 Markov Chain Monte Carlo Shape Sampling using Level Sets Siqi Chen and Richard J. Radke Department of Electrical, Computer and Systems Engineering Rensselaer Polytechnic Institute, Troy, NY 12180 chens@rpi.edu,
Markov Chain Monte Carlo Shape Sampling using Level Sets Siqi Chen and Richard J. Radke Department of Electrical, Computer and Systems Engineering Rensselaer Polytechnic Institute, Troy, NY 12180 chens@rpi.edu,
Snakes, Active Contours, and Segmentation Introduction and Classical Active Contours Active Contours Without Edges
 Level Sets & Snakes Snakes, Active Contours, and Segmentation Introduction and Classical Active Contours Active Contours Without Edges Scale Space and PDE methods in image analysis and processing - Arjan
Level Sets & Snakes Snakes, Active Contours, and Segmentation Introduction and Classical Active Contours Active Contours Without Edges Scale Space and PDE methods in image analysis and processing - Arjan
Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong)
") Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong) References: [1] http://homepages.inf.ed.ac.uk/rbf/hipr2/index.htm [2] http://www.cs.wisc.edu/~dyer/cs540/notes/vision.html
Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong) References: [1] http://homepages.inf.ed.ac.uk/rbf/hipr2/index.htm [2] http://www.cs.wisc.edu/~dyer/cs540/notes/vision.html
Supervised vs. Unsupervised Learning
 Clustering Supervised vs. Unsupervised Learning So far we have assumed that the training samples used to design the classifier were labeled by their class membership (supervised learning) We assume now
Clustering Supervised vs. Unsupervised Learning So far we have assumed that the training samples used to design the classifier were labeled by their class membership (supervised learning) We assume now
1 Methods for Posterior Simulation
 1 Methods for Posterior Simulation Let p(θ y) be the posterior. simulation. Koop presents four methods for (posterior) 1. Monte Carlo integration: draw from p(θ y). 2. Gibbs sampler: sequentially drawing
1 Methods for Posterior Simulation Let p(θ y) be the posterior. simulation. Koop presents four methods for (posterior) 1. Monte Carlo integration: draw from p(θ y). 2. Gibbs sampler: sequentially drawing
Region-based Segmentation
 Region-based Segmentation Image Segmentation Group similar components (such as, pixels in an image, image frames in a video) to obtain a compact representation. Applications: Finding tumors, veins, etc.
Region-based Segmentation Image Segmentation Group similar components (such as, pixels in an image, image frames in a video) to obtain a compact representation. Applications: Finding tumors, veins, etc.
Short-Cut MCMC: An Alternative to Adaptation
 Short-Cut MCMC: An Alternative to Adaptation Radford M. Neal Dept. of Statistics and Dept. of Computer Science University of Toronto http://www.cs.utoronto.ca/ radford/ Third Workshop on Monte Carlo Methods,
Short-Cut MCMC: An Alternative to Adaptation Radford M. Neal Dept. of Statistics and Dept. of Computer Science University of Toronto http://www.cs.utoronto.ca/ radford/ Third Workshop on Monte Carlo Methods,
ISSN: X International Journal of Advanced Research in Electronics and Communication Engineering (IJARECE) Volume 6, Issue 8, August 2017
 Volume 6, Issue 8, August 2017") ENTROPY BASED CONSTRAINT METHOD FOR IMAGE SEGMENTATION USING ACTIVE CONTOUR MODEL M.Nirmala Department of ECE JNTUA college of engineering, Anantapuramu Andhra Pradesh,India Abstract: Over the past existing
ENTROPY BASED CONSTRAINT METHOD FOR IMAGE SEGMENTATION USING ACTIVE CONTOUR MODEL M.Nirmala Department of ECE JNTUA college of engineering, Anantapuramu Andhra Pradesh,India Abstract: Over the past existing
Clustering. Discover groups such that samples within a group are more similar to each other than samples across groups.
 Clustering 1 Clustering Discover groups such that samples within a group are more similar to each other than samples across groups. 2 Clustering Discover groups such that samples within a group are more
Clustering 1 Clustering Discover groups such that samples within a group are more similar to each other than samples across groups. 2 Clustering Discover groups such that samples within a group are more
Local or Global Minima: Flexible Dual-Front Active Contours
 Local or Global Minima: Flexible Dual-Front Active Contours Hua Li 1,2 and Anthony Yezzi 1 1 School of ECE, Georgia Institute of Technology, Atlanta, GA, USA 2 Dept. of Elect. & Info. Eng., Huazhong Univ.
Local or Global Minima: Flexible Dual-Front Active Contours Hua Li 1,2 and Anthony Yezzi 1 1 School of ECE, Georgia Institute of Technology, Atlanta, GA, USA 2 Dept. of Elect. & Info. Eng., Huazhong Univ.
PATTERN CLASSIFICATION AND SCENE ANALYSIS
 PATTERN CLASSIFICATION AND SCENE ANALYSIS RICHARD O. DUDA PETER E. HART Stanford Research Institute, Menlo Park, California A WILEY-INTERSCIENCE PUBLICATION JOHN WILEY & SONS New York Chichester Brisbane
PATTERN CLASSIFICATION AND SCENE ANALYSIS RICHARD O. DUDA PETER E. HART Stanford Research Institute, Menlo Park, California A WILEY-INTERSCIENCE PUBLICATION JOHN WILEY & SONS New York Chichester Brisbane
Digital Image Processing Fundamentals
 Ioannis Pitas Digital Image Processing Fundamentals Chapter 7 Shape Description Answers to the Chapter Questions Thessaloniki 1998 Chapter 7: Shape description 7.1 Introduction 1. Why is invariance to
Ioannis Pitas Digital Image Processing Fundamentals Chapter 7 Shape Description Answers to the Chapter Questions Thessaloniki 1998 Chapter 7: Shape description 7.1 Introduction 1. Why is invariance to
Submitted by Wesley Snyder, Ph.D. Department of Electrical and Computer Engineering. North Carolina State University. February 29 th, 2004.
 Segmentation using Multispectral Adaptive Contours Final Report To U.S. Army Research Office On contract #DAAD-19-03-1-037 Submitted by Wesley Snyder, Ph.D. Department of Electrical and Computer Engineering
Segmentation using Multispectral Adaptive Contours Final Report To U.S. Army Research Office On contract #DAAD-19-03-1-037 Submitted by Wesley Snyder, Ph.D. Department of Electrical and Computer Engineering
STATISTICS AND ANALYSIS OF SHAPE
 Control and Cybernetics vol. 36 (2007) No. 2 Book review: STATISTICS AND ANALYSIS OF SHAPE by H. Krim, A. Yezzi, Jr., eds. There are numerous definitions of a notion of shape of an object. These definitions
Control and Cybernetics vol. 36 (2007) No. 2 Book review: STATISTICS AND ANALYSIS OF SHAPE by H. Krim, A. Yezzi, Jr., eds. There are numerous definitions of a notion of shape of an object. These definitions
10703 Deep Reinforcement Learning and Control
 10703 Deep Reinforcement Learning and Control Russ Salakhutdinov Machine Learning Department rsalakhu@cs.cmu.edu Policy Gradient I Used Materials Disclaimer: Much of the material and slides for this lecture
10703 Deep Reinforcement Learning and Control Russ Salakhutdinov Machine Learning Department rsalakhu@cs.cmu.edu Policy Gradient I Used Materials Disclaimer: Much of the material and slides for this lecture
Digital Image Processing Laboratory: MAP Image Restoration
 Purdue University: Digital Image Processing Laboratories 1 Digital Image Processing Laboratory: MAP Image Restoration October, 015 1 Introduction This laboratory explores the use of maximum a posteriori
Purdue University: Digital Image Processing Laboratories 1 Digital Image Processing Laboratory: MAP Image Restoration October, 015 1 Introduction This laboratory explores the use of maximum a posteriori
Non-Parametric Modeling
 Non-Parametric Modeling CE-725: Statistical Pattern Recognition Sharif University of Technology Spring 2013 Soleymani Outline Introduction Non-Parametric Density Estimation Parzen Windows Kn-Nearest Neighbor
Non-Parametric Modeling CE-725: Statistical Pattern Recognition Sharif University of Technology Spring 2013 Soleymani Outline Introduction Non-Parametric Density Estimation Parzen Windows Kn-Nearest Neighbor
Image Segmentation. Shengnan Wang
 Image Segmentation Shengnan Wang shengnan@cs.wisc.edu Contents I. Introduction to Segmentation II. Mean Shift Theory 1. What is Mean Shift? 2. Density Estimation Methods 3. Deriving the Mean Shift 4. Mean
Image Segmentation Shengnan Wang shengnan@cs.wisc.edu Contents I. Introduction to Segmentation II. Mean Shift Theory 1. What is Mean Shift? 2. Density Estimation Methods 3. Deriving the Mean Shift 4. Mean
Monte Carlo Methods and Statistical Computing: My Personal E
 Monte Carlo Methods and Statistical Computing: My Personal Experience Department of Mathematics & Statistics Indian Institute of Technology Kanpur November 29, 2014 Outline Preface 1 Preface 2 3 4 5 6
Monte Carlo Methods and Statistical Computing: My Personal Experience Department of Mathematics & Statistics Indian Institute of Technology Kanpur November 29, 2014 Outline Preface 1 Preface 2 3 4 5 6
Dynamic Thresholding for Image Analysis
 Dynamic Thresholding for Image Analysis Statistical Consulting Report for Edward Chan Clean Energy Research Center University of British Columbia by Libo Lu Department of Statistics University of British
Dynamic Thresholding for Image Analysis Statistical Consulting Report for Edward Chan Clean Energy Research Center University of British Columbia by Libo Lu Department of Statistics University of British
Stochastic Simulation: Algorithms and Analysis
 Soren Asmussen Peter W. Glynn Stochastic Simulation: Algorithms and Analysis et Springer Contents Preface Notation v xii I What This Book Is About 1 1 An Illustrative Example: The Single-Server Queue 1
Soren Asmussen Peter W. Glynn Stochastic Simulation: Algorithms and Analysis et Springer Contents Preface Notation v xii I What This Book Is About 1 1 An Illustrative Example: The Single-Server Queue 1
Announcements. Edges. Last Lecture. Gradients: Numerical Derivatives f(x) Edge Detection, Lines. Intro Computer Vision. CSE 152 Lecture 10
 Edge Detection, Lines. Intro Computer Vision. CSE 152 Lecture 10") Announcements Assignment 2 due Tuesday, May 4. Edge Detection, Lines Midterm: Thursday, May 6. Introduction to Computer Vision CSE 152 Lecture 10 Edges Last Lecture 1. Object boundaries 2. Surface normal
Announcements Assignment 2 due Tuesday, May 4. Edge Detection, Lines Midterm: Thursday, May 6. Introduction to Computer Vision CSE 152 Lecture 10 Edges Last Lecture 1. Object boundaries 2. Surface normal
Medical Image Segmentation using Level Sets
 Medical Image Segmentation using Level Sets Technical Report #CS-8-1 Tenn Francis Chen Abstract Segmentation is a vital aspect of medical imaging. It aids in the visualization of medical data and diagnostics
Medical Image Segmentation using Level Sets Technical Report #CS-8-1 Tenn Francis Chen Abstract Segmentation is a vital aspect of medical imaging. It aids in the visualization of medical data and diagnostics
LEVEL SET ALGORITHMS COMPARISON FOR MULTI-SLICE CT LEFT VENTRICLE SEGMENTATION
 LEVEL SET ALGORITHMS COMPARISON FOR MULTI-SLICE CT LEFT VENTRICLE SEGMENTATION 1 Investigador Prometeo, Universidad de Cuenca, Departamento de Electrónica y Telecomunicaciones, Cuenca, Ecuador 2 Departamento
LEVEL SET ALGORITHMS COMPARISON FOR MULTI-SLICE CT LEFT VENTRICLE SEGMENTATION 1 Investigador Prometeo, Universidad de Cuenca, Departamento de Electrónica y Telecomunicaciones, Cuenca, Ecuador 2 Departamento
SYDE Winter 2011 Introduction to Pattern Recognition. Clustering
 SYDE 372 - Winter 2011 Introduction to Pattern Recognition Clustering Alexander Wong Department of Systems Design Engineering University of Waterloo Outline 1 2 3 4 5 All the approaches we have learned
SYDE 372 - Winter 2011 Introduction to Pattern Recognition Clustering Alexander Wong Department of Systems Design Engineering University of Waterloo Outline 1 2 3 4 5 All the approaches we have learned
MSA101/MVE Lecture 5
 MSA101/MVE187 2017 Lecture 5 Petter Mostad Chalmers University September 12, 2017 1 / 15 Importance sampling MC integration computes h(x)f (x) dx where f (x) is a probability density function, by simulating
MSA101/MVE187 2017 Lecture 5 Petter Mostad Chalmers University September 12, 2017 1 / 15 Importance sampling MC integration computes h(x)f (x) dx where f (x) is a probability density function, by simulating
Lecture 12 Level Sets & Parametric Transforms. sec & ch. 11 of Machine Vision by Wesley E. Snyder & Hairong Qi
 Lecture 12 Level Sets & Parametric Transforms sec. 8.5.2 & ch. 11 of Machine Vision by Wesley E. Snyder & Hairong Qi Spring 2017 16-725 (CMU RI) : BioE 2630 (Pitt) Dr. John Galeotti The content of these
Lecture 12 Level Sets & Parametric Transforms sec. 8.5.2 & ch. 11 of Machine Vision by Wesley E. Snyder & Hairong Qi Spring 2017 16-725 (CMU RI) : BioE 2630 (Pitt) Dr. John Galeotti The content of these
Approximate Bayesian Computation. Alireza Shafaei - April 2016
 Approximate Bayesian Computation Alireza Shafaei - April 2016 The Problem Given a dataset, we are interested in. The Problem Given a dataset, we are interested in. The Problem Given a dataset, we are interested
Approximate Bayesian Computation Alireza Shafaei - April 2016 The Problem Given a dataset, we are interested in. The Problem Given a dataset, we are interested in. The Problem Given a dataset, we are interested
Let s start with occluding contours (or interior and exterior silhouettes), and look at image-space algorithms. A very simple technique is to render
, and look at image-space algorithms. A very simple technique is to render") 1 There are two major classes of algorithms for extracting most kinds of lines from 3D meshes. First, there are image-space algorithms that render something (such as a depth map or cosine-shaded model),
1 There are two major classes of algorithms for extracting most kinds of lines from 3D meshes. First, there are image-space algorithms that render something (such as a depth map or cosine-shaded model),
An Active Contour Model without Edges
 An Active Contour Model without Edges Tony Chan and Luminita Vese Department of Mathematics, University of California, Los Angeles, 520 Portola Plaza, Los Angeles, CA 90095-1555 chan,lvese@math.ucla.edu
An Active Contour Model without Edges Tony Chan and Luminita Vese Department of Mathematics, University of California, Los Angeles, 520 Portola Plaza, Los Angeles, CA 90095-1555 chan,lvese@math.ucla.edu
Unstructured Mesh Generation for Implicit Moving Geometries and Level Set Applications
 Unstructured Mesh Generation for Implicit Moving Geometries and Level Set Applications Per-Olof Persson (persson@mit.edu) Department of Mathematics Massachusetts Institute of Technology http://www.mit.edu/
Unstructured Mesh Generation for Implicit Moving Geometries and Level Set Applications Per-Olof Persson (persson@mit.edu) Department of Mathematics Massachusetts Institute of Technology http://www.mit.edu/
CoE4TN4 Image Processing
 CoE4TN4 Image Processing Chapter 11 Image Representation & Description Image Representation & Description After an image is segmented into regions, the regions are represented and described in a form suitable
CoE4TN4 Image Processing Chapter 11 Image Representation & Description Image Representation & Description After an image is segmented into regions, the regions are represented and described in a form suitable
Segmentation. Namrata Vaswani,
 Segmentation Namrata Vaswani, namrata@iastate.edu Read Sections 5.1,5.2,5.3 of [1] Edge detection and filtering : Canny edge detection algorithm to get a contour of the object boundary Hough transform:
Segmentation Namrata Vaswani, namrata@iastate.edu Read Sections 5.1,5.2,5.3 of [1] Edge detection and filtering : Canny edge detection algorithm to get a contour of the object boundary Hough transform:
GiRaF: a toolbox for Gibbs Random Fields analysis
 GiRaF: a toolbox for Gibbs Random Fields analysis Julien Stoehr *1, Pierre Pudlo 2, and Nial Friel 1 1 University College Dublin 2 Aix-Marseille Université February 24, 2016 Abstract GiRaF package offers
GiRaF: a toolbox for Gibbs Random Fields analysis Julien Stoehr *1, Pierre Pudlo 2, and Nial Friel 1 1 University College Dublin 2 Aix-Marseille Université February 24, 2016 Abstract GiRaF package offers
Yunyun Yang, Chunming Li, Chiu-Yen Kao and Stanley Osher. Speaker: Chiu-Yen Kao (Math Department, The Ohio State University) BIRS, Banff, Canada
 BIRS, Banff, Canada") Yunyun Yang, Chunming Li, Chiu-Yen Kao and Stanley Osher Speaker: Chiu-Yen Kao (Math Department, The Ohio State University) BIRS, Banff, Canada Outline Review of Region-based Active Contour Models Mumford
Yunyun Yang, Chunming Li, Chiu-Yen Kao and Stanley Osher Speaker: Chiu-Yen Kao (Math Department, The Ohio State University) BIRS, Banff, Canada Outline Review of Region-based Active Contour Models Mumford
Edge Detection and Active Contours
 Edge Detection and Active Contours Elsa Angelini, Florence Tupin Department TSI, Telecom ParisTech Name.surname@telecom-paristech.fr 2011 Outline Introduction Edge Detection Active Contours Introduction
Edge Detection and Active Contours Elsa Angelini, Florence Tupin Department TSI, Telecom ParisTech Name.surname@telecom-paristech.fr 2011 Outline Introduction Edge Detection Active Contours Introduction
10-701/15-781, Fall 2006, Final
 -7/-78, Fall 6, Final Dec, :pm-8:pm There are 9 questions in this exam ( pages including this cover sheet). If you need more room to work out your answer to a question, use the back of the page and clearly
-7/-78, Fall 6, Final Dec, :pm-8:pm There are 9 questions in this exam ( pages including this cover sheet). If you need more room to work out your answer to a question, use the back of the page and clearly
Last update: May 4, Vision. CMSC 421: Chapter 24. CMSC 421: Chapter 24 1
 Last update: May 4, 200 Vision CMSC 42: Chapter 24 CMSC 42: Chapter 24 Outline Perception generally Image formation Early vision 2D D Object recognition CMSC 42: Chapter 24 2 Perception generally Stimulus
Last update: May 4, 200 Vision CMSC 42: Chapter 24 CMSC 42: Chapter 24 Outline Perception generally Image formation Early vision 2D D Object recognition CMSC 42: Chapter 24 2 Perception generally Stimulus
Sampling informative/complex a priori probability distributions using Gibbs sampling assisted by sequential simulation
 Sampling informative/complex a priori probability distributions using Gibbs sampling assisted by sequential simulation Thomas Mejer Hansen, Klaus Mosegaard, and Knud Skou Cordua 1 1 Center for Energy Resources
Sampling informative/complex a priori probability distributions using Gibbs sampling assisted by sequential simulation Thomas Mejer Hansen, Klaus Mosegaard, and Knud Skou Cordua 1 1 Center for Energy Resources
Real-Time Visual Tracking Using Image Processing and Filtering Methods. Jin-cheol Ha
 Real-Time Visual Tracking Using Image Processing and Filtering Methods A Thesis Presented to The Academic Faculty by Jin-cheol Ha In Partial Fulfillment of the Requirements for the Degree Doctor of Philosophy
Real-Time Visual Tracking Using Image Processing and Filtering Methods A Thesis Presented to The Academic Faculty by Jin-cheol Ha In Partial Fulfillment of the Requirements for the Degree Doctor of Philosophy
Multiple Motion and Occlusion Segmentation with a Multiphase Level Set Method
 Multiple Motion and Occlusion Segmentation with a Multiphase Level Set Method Yonggang Shi, Janusz Konrad, W. Clem Karl Department of Electrical and Computer Engineering Boston University, Boston, MA 02215
Multiple Motion and Occlusion Segmentation with a Multiphase Level Set Method Yonggang Shi, Janusz Konrad, W. Clem Karl Department of Electrical and Computer Engineering Boston University, Boston, MA 02215
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 04 130131 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Histogram Equalization Image Filtering Linear
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 04 130131 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Histogram Equalization Image Filtering Linear
Mixture Models and the EM Algorithm
 Mixture Models and the EM Algorithm Padhraic Smyth, Department of Computer Science University of California, Irvine c 2017 1 Finite Mixture Models Say we have a data set D = {x 1,..., x N } where x i is
Mixture Models and the EM Algorithm Padhraic Smyth, Department of Computer Science University of California, Irvine c 2017 1 Finite Mixture Models Say we have a data set D = {x 1,..., x N } where x i is
Snakes reparameterization for noisy images segmentation and targets tracking
 Snakes reparameterization for noisy images segmentation and targets tracking Idrissi Sidi Yassine, Samir Belfkih. Lycée Tawfik Elhakim Zawiya de Noaceur, route de Marrakech, Casablanca, maroc. Laboratoire
Snakes reparameterization for noisy images segmentation and targets tracking Idrissi Sidi Yassine, Samir Belfkih. Lycée Tawfik Elhakim Zawiya de Noaceur, route de Marrakech, Casablanca, maroc. Laboratoire
Metropolis Light Transport
 Metropolis Light Transport CS295, Spring 2017 Shuang Zhao Computer Science Department University of California, Irvine CS295, Spring 2017 Shuang Zhao 1 Announcements Final presentation June 13 (Tuesday)
Metropolis Light Transport CS295, Spring 2017 Shuang Zhao Computer Science Department University of California, Irvine CS295, Spring 2017 Shuang Zhao 1 Announcements Final presentation June 13 (Tuesday)
A Toolbox of Level Set Methods
 A Toolbox of Level Set Methods Ian Mitchell Department of Computer Science University of British Columbia http://www.cs.ubc.ca/~mitchell mitchell@cs.ubc.ca research supported by the Natural Science and
A Toolbox of Level Set Methods Ian Mitchell Department of Computer Science University of British Columbia http://www.cs.ubc.ca/~mitchell mitchell@cs.ubc.ca research supported by the Natural Science and
Medial Scaffolds for 3D data modelling: status and challenges. Frederic Fol Leymarie
 Medial Scaffolds for 3D data modelling: status and challenges Frederic Fol Leymarie Outline Background Method and some algorithmic details Applications Shape representation: From the Medial Axis to the
Medial Scaffolds for 3D data modelling: status and challenges Frederic Fol Leymarie Outline Background Method and some algorithmic details Applications Shape representation: From the Medial Axis to the
Probabilistic Graphical Models
 Probabilistic Graphical Models Lecture 17 EM CS/CNS/EE 155 Andreas Krause Announcements Project poster session on Thursday Dec 3, 4-6pm in Annenberg 2 nd floor atrium! Easels, poster boards and cookies
Probabilistic Graphical Models Lecture 17 EM CS/CNS/EE 155 Andreas Krause Announcements Project poster session on Thursday Dec 3, 4-6pm in Annenberg 2 nd floor atrium! Easels, poster boards and cookies
Sensor Tasking and Control
 Sensor Tasking and Control Outline Task-Driven Sensing Roles of Sensor Nodes and Utilities Information-Based Sensor Tasking Joint Routing and Information Aggregation Summary Introduction To efficiently
Sensor Tasking and Control Outline Task-Driven Sensing Roles of Sensor Nodes and Utilities Information-Based Sensor Tasking Joint Routing and Information Aggregation Summary Introduction To efficiently
Support Vector Machines.
 Support Vector Machines srihari@buffalo.edu SVM Discussion Overview 1. Overview of SVMs 2. Margin Geometry 3. SVM Optimization 4. Overlapping Distributions 5. Relationship to Logistic Regression 6. Dealing
Support Vector Machines srihari@buffalo.edu SVM Discussion Overview 1. Overview of SVMs 2. Margin Geometry 3. SVM Optimization 4. Overlapping Distributions 5. Relationship to Logistic Regression 6. Dealing
MetaMorphs: Deformable Shape and Texture Models
 MetaMorphs: Deformable Shape and Texture Models Xiaolei Huang, Dimitris Metaxas, Ting Chen Division of Computer and Information Sciences Rutgers University New Brunswick, NJ 8854, USA {xiaolei, dnm}@cs.rutgers.edu,
MetaMorphs: Deformable Shape and Texture Models Xiaolei Huang, Dimitris Metaxas, Ting Chen Division of Computer and Information Sciences Rutgers University New Brunswick, NJ 8854, USA {xiaolei, dnm}@cs.rutgers.edu,
THE preceding chapters were all devoted to the analysis of images and signals which
 Chapter 5 Segmentation of Color, Texture, and Orientation Images THE preceding chapters were all devoted to the analysis of images and signals which take values in IR. It is often necessary, however, to
Chapter 5 Segmentation of Color, Texture, and Orientation Images THE preceding chapters were all devoted to the analysis of images and signals which take values in IR. It is often necessary, however, to
A Survey of Image Segmentation Based On Multi Region Level Set Method
 A Survey of Image Segmentation Based On Multi Region Level Set Method Suraj.R 1, Sudhakar.K 2 1 P.G Student, Computer Science and Engineering, Hindusthan College Of Engineering and Technology, Tamilnadu,
A Survey of Image Segmentation Based On Multi Region Level Set Method Suraj.R 1, Sudhakar.K 2 1 P.G Student, Computer Science and Engineering, Hindusthan College Of Engineering and Technology, Tamilnadu,
Extract Object Boundaries in Noisy Images using Level Set. Literature Survey
 Extract Object Boundaries in Noisy Images using Level Set by: Quming Zhou Literature Survey Submitted to Professor Brian Evans EE381K Multidimensional Digital Signal Processing March 15, 003 Abstract Finding
Extract Object Boundaries in Noisy Images using Level Set by: Quming Zhou Literature Survey Submitted to Professor Brian Evans EE381K Multidimensional Digital Signal Processing March 15, 003 Abstract Finding
COMPUTER AND ROBOT VISION
 VOLUME COMPUTER AND ROBOT VISION Robert M. Haralick University of Washington Linda G. Shapiro University of Washington A^ ADDISON-WESLEY PUBLISHING COMPANY Reading, Massachusetts Menlo Park, California
VOLUME COMPUTER AND ROBOT VISION Robert M. Haralick University of Washington Linda G. Shapiro University of Washington A^ ADDISON-WESLEY PUBLISHING COMPANY Reading, Massachusetts Menlo Park, California
Instance-based Learning CE-717: Machine Learning Sharif University of Technology. M. Soleymani Fall 2015
 Instance-based Learning CE-717: Machine Learning Sharif University of Technology M. Soleymani Fall 2015 Outline Non-parametric approach Unsupervised: Non-parametric density estimation Parzen Windows K-Nearest
Instance-based Learning CE-717: Machine Learning Sharif University of Technology M. Soleymani Fall 2015 Outline Non-parametric approach Unsupervised: Non-parametric density estimation Parzen Windows K-Nearest
Use of Extreme Value Statistics in Modeling Biometric Systems
 Use of Extreme Value Statistics in Modeling Biometric Systems Similarity Scores Two types of matching: Genuine sample Imposter sample Matching scores Enrolled sample 0.95 0.32 Probability Density Decision
Use of Extreme Value Statistics in Modeling Biometric Systems Similarity Scores Two types of matching: Genuine sample Imposter sample Matching scores Enrolled sample 0.95 0.32 Probability Density Decision
Image Processing. Image Features
 Image Processing Image Features Preliminaries 2 What are Image Features? Anything. What they are used for? Some statements about image fragments (patches) recognition Search for similar patches matching
Image Processing Image Features Preliminaries 2 What are Image Features? Anything. What they are used for? Some statements about image fragments (patches) recognition Search for similar patches matching
Method of Background Subtraction for Medical Image Segmentation
 Method of Background Subtraction for Medical Image Segmentation Seongjai Kim Department of Mathematics and Statistics, Mississippi State University Mississippi State, MS 39762, USA and Hyeona Lim Department
Method of Background Subtraction for Medical Image Segmentation Seongjai Kim Department of Mathematics and Statistics, Mississippi State University Mississippi State, MS 39762, USA and Hyeona Lim Department
SNAP Haskell. Abraham Starosta March 18, 2016 Code: Abstract
 SNAP Haskell Abraham Starosta March 18, 2016 Code: https://github.com/astarostap/cs240h_final_project Abstract The goal of SNAP Haskell is to become a general purpose, high performance system for analysis
SNAP Haskell Abraham Starosta March 18, 2016 Code: https://github.com/astarostap/cs240h_final_project Abstract The goal of SNAP Haskell is to become a general purpose, high performance system for analysis
Chapter 11 Representation & Description
 Chain Codes Chain codes are used to represent a boundary by a connected sequence of straight-line segments of specified length and direction. The direction of each segment is coded by using a numbering
Chain Codes Chain codes are used to represent a boundary by a connected sequence of straight-line segments of specified length and direction. The direction of each segment is coded by using a numbering
Bayesian Statistics Group 8th March Slice samplers. (A very brief introduction) The basic idea
 The basic idea") Bayesian Statistics Group 8th March 2000 Slice samplers (A very brief introduction) The basic idea lacements To sample from a distribution, simply sample uniformly from the region under the density function
Bayesian Statistics Group 8th March 2000 Slice samplers (A very brief introduction) The basic idea lacements To sample from a distribution, simply sample uniformly from the region under the density function
Deep Learning Shape Priors for Object Segmentation
 2013 IEEE Conference on Computer Vision and Pattern Recognition Deep Learning Shape Priors for Object Segmentation Fei Chen a,c Huimin Yu a,b Roland Hu a Xunxun Zeng d a Department of Information Science
2013 IEEE Conference on Computer Vision and Pattern Recognition Deep Learning Shape Priors for Object Segmentation Fei Chen a,c Huimin Yu a,b Roland Hu a Xunxun Zeng d a Department of Information Science