Observing people with multiple cameras
|
|
|
- Colin Richards
- 5 years ago
- Views:
Transcription

1 First Short Spring School on Surveillance (S 4 ) May 17-19, 2011 Modena,Italy Course Material Observing people with multiple cameras Andrea Cavallaro Queen Mary University, London (UK)
2 Observing people with multiple cameras Andrea Cavallaro youtube.com/smartcameras videotracking.org Topics covered Target detection and tracking with multiple cameras Fusion and behaviour recognition Calibration Content-based view selection Keywords Information filtering; metadata; Calibration; Tracking; Fusion; Behaviour understanding. 1





3 Resources Acknowledgements Emilio Maggio Murtaza Taj Gabin Kayumbi Nadeem Anjum Matteo Bregonzio Stefan Karlsson Fahad Daniyal Huiyu Zhou Fabio Poiesi Tahir Nawaz EU FP7 project APIDIS UK EPSRC project MOTINAS 2









4 Motivation Dramatic increase in the scale of camera networks Large-scale applications that can observe detect track events of interest across large areas Why now? technological advances in sensor design communication computing reduction of cost of image sensors supporting network infrastructure Deployment example: surveillance 3



5 Sport: crowds, occlusions, fast changes, clutter! Excellent testbed for surveillance algorithms! Synchronisation External trigger based synchronisation Trigger generated through NI PCI-6601 trigger board Each camera captures at exactly the same time Ethernet Data cables Signal replicator Trigger board Synchronization signal 4





6 Synchronisation Visio-Box for synchronised acquisition Each audio-visual data stream is captured by a separate processor Audio amplifier Video Audio Scenario 5



7 What for? multi-camera processing 6
8 Context Task Cameras signal processing attributes pattern recognition Content production camera selection content summaries perceptual coding Scene understanding behaviours interactions identities a priori information and info from other cameras a priori information and info from other cameras a priori information and info from other cameras input video pre-filtering object detection postprocessing symbols event detection 3D analysis tracking and classification a priori information and info from other cameras a priori information and info from other cameras a priori information and info from other cameras 7
9 (Visual) Information filtering Objective To extract relevant information from a scene (through images) with an internal/external processing unit with the help of other cameras (or sensors) The format of the output format may be different from the signal that was captured by the sensor (transmoding) From visual information to knowledge Objective to extract the main content message e.g., automatic video object segmentation (detection & tracking) classification of the pixels in two classes: foreground + background pixels or: patches, feature points, edges,... Use a priori information Application dependent Alternative probabilistic description of the observations, supported by time and/or multi-camera integration 8
 motion classification change detection object classification Tracking (i.e., how to propagate relevant information) over time")
10 From detection to description Detection (i.e., how to find relevant information) motion classification change detection object classification Tracking (i.e., how to propagate relevant information) over time (in the same camera) across cameras despite occlusions despite multiple simultaneous objects despite local and global changes in illumination Object and scene description (compact & unambiguous) communication storage Multi-camera processing: 2 approaches First fuse, then track Data fusion object tracking First track, then fuse object tracking object tracking Data fusion object tracking 9


 Typical object")


11 Video tracking: approximations Annotation of a video in terms of its component objects to localize objects of interest to link instances of the same object over time (tracking) Typical object approximations for tracking Polygonal approximation Bounding ellipse Bounding box Position only Challenges Occlusions Illumination (shadows) Over-segmentation 10
12 Tracking: challenges Track management issues Track initiation Track termination Occlusions handling Partial / total occlusions Spawning and splitting / merging Target model update (drift problem) What makes tracking difficult? Noisy observations Changes in object pose / scale Changes in scene illumination Other objects and background with similar appearance (clutter) Tracking: approaches (1/2) Feature-based tracking Track parts of objects (features) corner / feature point detection and pattern matching Problems low-resolution targets feature grouping Contour-based tracking Track object boundaries Full boundaries (e.g., snakes) Partial boundaries (e.g., omega-shaped edges for heads) Problems partial occlusions (handled e.g. with Kalman-snakes) 11
13 Tracking: approaches (2/2) Region-based tracking Track blobs which roughly correspond to objects Problem partial occlusions Model-based tracking A priori knowledge of the shape Problems computationally intensive need a large set of (3D) models Object state Estimate the state x k from the observations z 1:k x k is a vector of object parameters (position, velocity, shape, etc.) z k is k the frame at time k (appearance-based) the output of an object detector (detection-based) State affine transformation parameters of a patch w.r.t. the first image parameters of a shape parameters of the contour speed and acceleration parameters describing target appearance 12
 IT 2 w Target model:")
")



14 Target model: template initialization later in the sequence... model I T Score function: Α x, w I w d( x) IT 2 w Target model: template Target template stores luminance (color) values + their location translational model (or more complex motion models) Advantages: simple and computationally fast Disadvantages: over time becomes non-representative of the object appearance (noise, partial occlusions, pose or scale changes) Improved templates temporal update model each pixel in the template as a mixture of Gaussians that is updated over time include initial template to reduce drifting evolve based on a modified Kalman filter robustness to illumination variations phase of wavelet coefficients (instead of color) 13
15 Improved model: histogram Observation The complete pixel information may be (is) redundant / misleading for the tracking task Target representation: desired properties descriptive enough to disambiguate object vs. background flexible enough to cope with changes of target scale pose scene illumination partial occlusions histograms Color histograms for tracking Color histograms invariance to scaling (normalized) rotation robustness to partial occlusions data reduction and efficient computation 14

 rotation & size invariance No Yes flexibility No Yes")
16 Likelihood of a candidate (score) k th frame model ˆq candidates ˆp y, 1 u 1 d pˆ y qˆ pˆ y qˆ m u u Target representation: template vs. color histogram Pixel-based representation (template) data reduction No Yes Statistical representation (normalized color distribution) rotation & size invariance No Yes flexibility No Yes spatial information Yes No (*) If correctly updated is more descriptive 15
17 Integrating detection and tracking Tracking propagates the initialization information model: template, statistical representation, parts, should update the model should self-initialize Approaches multiple single-target trackers initialized with a detector/classifier Detect, model, search Birth and death governed by heuristics Usually poor clutter handling Associate detections over time (data association filters) Nearest neighbour filter, JPDAF, MHT, Data association filters Objective to associate detections Approaches Nearest Neighbour (NN) filter one hypothesis per trajectory Joint Probabilistic Data Association Filter (JPDAF) evaluate all associations between two frames handle clutter complexity: exponential with number of targets Multiple Hypotheses Tracker (MHT) evaluate hypotheses over multiple frames complexity: exponential with time and with number of targets gating to reduce computational cost extending the Bayes recursion to multiple targets (using Random Finite Sets) 16
18 Extending the Bayes recursion to multiple targets PHD filter for multi-target tracking Filter the detections particularly effective in removing clutter Linear complexity with the number of targets Incorporates scene contextual information Learning scene context for multiple object tracking E. Maggio and A. Cavallaro IEEE Trans. on Image Processing, August 2009, pp Efficient multi-target visual tracking using Random Finite Sets E. Maggio, M. Taj, A. Cavallaro IEEE Trans. on Circuits and Systems for Video Technology, August 2008, pp How can I evaluate and compare (easily!) my results? 17
 Overlap measure Lost track ratio Dataset PETS00 PETS10 T. Nawaz, A.")

 Requested citation acknowledgment If you want to contribute to this collection of datasets")
19 PFT: a Protocol for Evaluating video Trackers Set of trials Robustness of trackers to initialization perturbations, noise, frame dropping, illumination changes Evaluation measure (AUC λ ) Overlap measure Lost track ratio Dataset PETS00 PETS10 T. Nawaz, A. Cavallaro, PFT: a Protocol for Evaluating video Trackers, ICIP 2011 Software, data and results available at Clemson SPEVI Surveillance Performance EValuation Initiative SPEVI Surveillance Performance EValuation Initiative One-stop web site collecting existing datasets Pointers to other evaluation programmes / datasets Server hosting received datasets and ground-truth Free distribution (for research) Requested citation acknowledgment If you want to contribute to this collection of datasets please contact info@spevi.org 18

20 Approach 1: track and then fuse Approach 2: fuse and then track Trajectory association and fusion on ground plane Object detection and tracking Information fusion Object detection and tracking Object detection and tracking 19



21 A simple example: 2 cameras Global trajectory reconstruction 1:N trajectory matching Normalized cross correlation C 1 Detection and tracking Ground plane projection Feature extraction Feature matching Complete trajectory C 2 Ground plane projection Directional distance Trajectory shape Average velocity Dominant turn angles PCA components 20



22 Global trajectory reconstruction Detection & tracking Ground-plane projection Feature extraction Trajectory of interest Ground-plane matching Candidates Detection & tracking Ground-plane projection Feature extraction Image-plane verification Association Trajectory association and fusion across multiple partially overlapping cameras N. Anjum, A. Cavallaro IEEE AVSS 2009 [best paper award] Fusion Linkage Approach 1: track and then fuse Approach 2: fuse and then track 21







23 Track before detect Information fusion Object detection and tracking Multi-camera track-before-detect M. Taj, A. Cavallaro Proc. of ACM / IEEE ICDSC 2009 Multi-camera player tracking P1 P2 R1 R2 22

24 How about other sports? Trajectory association across multiple cameras Trajectory clustering feature feature extraction 1 extraction Mean-shift Mean-shift clustering clustering Y1 Y 2 cluster merging Y1 Y 2 cluster merging feature extraction M M Mean-shift clustering Y M cluster merging _ Y M cluster fusion common patterns cluster analysis outliers Multi-feature object trajectory clustering for video analysis N. Anjum, A. Cavallaro IEEE Trans. on Circuits and Systems for Video Technology, 18(11), Nov



25 Ball detection - challenges Occlusions partial total Appearance similarity player player player court ball - court ball - players Where is the ball? Estimation of the approximate location of the ball based on players behaviour Use of motion flow to estimate regions of convergence of players during attacks 24


26 Position estimation Detector-less ball position estimation where is the ball? Detector-less ball localisation using context and motion flow analysis, F. Poiesi, F. Daniyal, A. Cavallaro ICIP




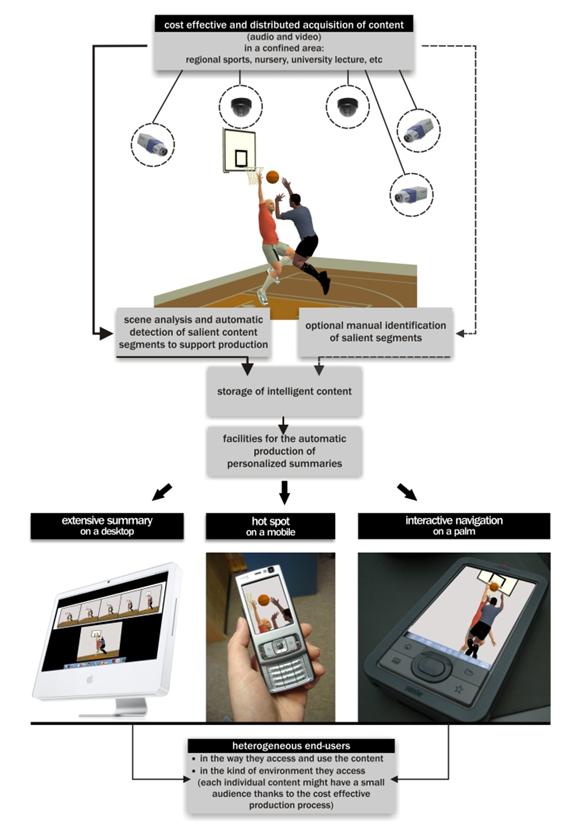
27 View selection c 1 c N 1 I t N I t motion detection motion detection 1 d t N d t object detection and tracking 1 X t N X t object score object score 1 t N t content ranking and camera selection c ~ t N X 1 t feature extraction feature extraction 1 t N t event detection event detection 1 t N t View selection / video ranking View selection given n views of an object m objects in the scene n views of m objects in the scene Applications Video summarization for multiple-video streams Camera scheduling based on automatic rating of content [demo video] Quality of view: components Location Orientation Visibility Motion path Event Bag 26
28 View selection Tracking - example 1 Production example A Production - example with audio Surveillance: generic pipeline camera calibration global trajectory reconstruction trajectory clustering common patterns outliers 27
29 Surveillance: generic pipeline camera calibration global trajectory reconstruction trajectory clustering common patterns outliers Localisation of cameras Generic pipeline camera calibration global trajectory reconstruction trajectory clustering common patterns outliers Localisation of cameras Complete trajectory 28
30 Surveillance: generic pipeline camera calibration global trajectory reconstruction trajectory clustering common patterns outliers Localisation of cameras Complete trajectory Clustering of trajectories Open challenges 29
31 Calibration and topology Camera network layout non-overlapping fields of view interpreting the dynamics of moving objects in wide areas partially overlapping or overlapping fields of view observing objects from different view-points (3D interpretation) to disambiguate occlusions Calibration image to 3D space correspondence (points) relative location D i and orientation Φ i of the cameras Intrinsic calibration relationship between camera-centric and image coordinates camera matrix Calibration of a camera network Camera network layout Partially overlapping Non-overlapping 30
32 Calibration methods Small scale (overlapping fields of view) multi-view geometry epipolar geometry projective transformations feature detection and matching Large scale (partially/non overlapping fields of view) observations of an object simultaneous calibration and tracking simultaneous calibration and synchronization Non-overlapping cameras How to localize randomly placed cameras? non-overlapping field of view no intrinsic calibration top-down view optical axis is perpendicular to the ground plane, or removed perspective deformation Approach Learn regression parameters from available trajectories Extrapolate trajectory data to unobserved regions Kalman filtering on available and estimated trajectory estimated trajectory observed moving target FOV 31
 2011 Multi-camera processing: architecture Centralized Decentralized Distributed Distributed and decentralized multi-camera")
33 Example: estimation result Automated localization of a camera network N. Anjum, A. Cavallaro IEEE Intelligent Systems, (to appear) 2011 Multi-camera processing: architecture Centralized Decentralized Distributed Distributed and decentralized multi-camera tracking M. Taj, A. Cavallaro IEEE Signal Processing Magazine, Vol. 28, Issue 3, May



34 Multi-camera processing: crowded scenes Ref: TREC Video Retrieval Evaluation 2008 Dataset description - scenario 33
35 Research outlook / interesting topics What s next? Algorithms learning a model (on-line) / model update probabilistic description of the observations, supported by multi-camera integration Sensors heterogeneous sensors (video is good, but not the only modality!) Applications embedded systems large-scale behavior recognition, detection of unusual events Datasets tracking on real sequences (crowds, UAVs, ) + evaluation! To play with OpenCV library Image Processing & Computer Vision library Camellia Hybrid tracker 3D, pattern recognition, tracking, Other links Andrea Cavallaro Queen Mary University of London 34
Chapter 9 Object Tracking an Overview
 Chapter 9 Object Tracking an Overview The output of the background subtraction algorithm, described in the previous chapter, is a classification (segmentation) of pixels into foreground pixels (those belonging
Chapter 9 Object Tracking an Overview The output of the background subtraction algorithm, described in the previous chapter, is a classification (segmentation) of pixels into foreground pixels (those belonging
QMUL-ACTIVA: Person Runs detection for the TRECVID Surveillance Event Detection task
 QMUL-ACTIVA: Person Runs detection for the TRECVID Surveillance Event Detection task Fahad Daniyal and Andrea Cavallaro Queen Mary University of London Mile End Road, London E1 4NS (United Kingdom) {fahad.daniyal,andrea.cavallaro}@eecs.qmul.ac.uk
QMUL-ACTIVA: Person Runs detection for the TRECVID Surveillance Event Detection task Fahad Daniyal and Andrea Cavallaro Queen Mary University of London Mile End Road, London E1 4NS (United Kingdom) {fahad.daniyal,andrea.cavallaro}@eecs.qmul.ac.uk
Features Points. Andrea Torsello DAIS Università Ca Foscari via Torino 155, Mestre (VE)
") Features Points Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Finding Corners Edge detectors perform poorly at corners. Corners provide repeatable points for matching, so
Features Points Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Finding Corners Edge detectors perform poorly at corners. Corners provide repeatable points for matching, so
Motion Tracking and Event Understanding in Video Sequences
 Motion Tracking and Event Understanding in Video Sequences Isaac Cohen Elaine Kang, Jinman Kang Institute for Robotics and Intelligent Systems University of Southern California Los Angeles, CA Objectives!
Motion Tracking and Event Understanding in Video Sequences Isaac Cohen Elaine Kang, Jinman Kang Institute for Robotics and Intelligent Systems University of Southern California Los Angeles, CA Objectives!
Model-based Visual Tracking:
 Technische Universität München Model-based Visual Tracking: the OpenTL framework Giorgio Panin Technische Universität München Institut für Informatik Lehrstuhl für Echtzeitsysteme und Robotik (Prof. Alois
Technische Universität München Model-based Visual Tracking: the OpenTL framework Giorgio Panin Technische Universität München Institut für Informatik Lehrstuhl für Echtzeitsysteme und Robotik (Prof. Alois
Computer Vision with MATLAB MATLAB Expo 2012 Steve Kuznicki
 Computer Vision with MATLAB MATLAB Expo 2012 Steve Kuznicki 2011 The MathWorks, Inc. 1 Today s Topics Introduction Computer Vision Feature-based registration Automatic image registration Object recognition/rotation
Computer Vision with MATLAB MATLAB Expo 2012 Steve Kuznicki 2011 The MathWorks, Inc. 1 Today s Topics Introduction Computer Vision Feature-based registration Automatic image registration Object recognition/rotation
Object Recognition with Invariant Features
 Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
Multi-Camera Calibration, Object Tracking and Query Generation
 MITSUBISHI ELECTRIC RESEARCH LABORATORIES http://www.merl.com Multi-Camera Calibration, Object Tracking and Query Generation Porikli, F.; Divakaran, A. TR2003-100 August 2003 Abstract An automatic object
MITSUBISHI ELECTRIC RESEARCH LABORATORIES http://www.merl.com Multi-Camera Calibration, Object Tracking and Query Generation Porikli, F.; Divakaran, A. TR2003-100 August 2003 Abstract An automatic object
Segmentation and Tracking of Partial Planar Templates
 Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Visuelle Perzeption für Mensch- Maschine Schnittstellen
 Visuelle Perzeption für Mensch- Maschine Schnittstellen Vorlesung, WS 2009 Prof. Dr. Rainer Stiefelhagen Dr. Edgar Seemann Institut für Anthropomatik Universität Karlsruhe (TH) http://cvhci.ira.uka.de
Visuelle Perzeption für Mensch- Maschine Schnittstellen Vorlesung, WS 2009 Prof. Dr. Rainer Stiefelhagen Dr. Edgar Seemann Institut für Anthropomatik Universität Karlsruhe (TH) http://cvhci.ira.uka.de
COSC160: Detection and Classification. Jeremy Bolton, PhD Assistant Teaching Professor
 COSC160: Detection and Classification Jeremy Bolton, PhD Assistant Teaching Professor Outline I. Problem I. Strategies II. Features for training III. Using spatial information? IV. Reducing dimensionality
COSC160: Detection and Classification Jeremy Bolton, PhD Assistant Teaching Professor Outline I. Problem I. Strategies II. Features for training III. Using spatial information? IV. Reducing dimensionality
Tightly-Integrated Visual and Inertial Navigation for Pinpoint Landing on Rugged Terrains
 Tightly-Integrated Visual and Inertial Navigation for Pinpoint Landing on Rugged Terrains PhD student: Jeff DELAUNE ONERA Director: Guy LE BESNERAIS ONERA Advisors: Jean-Loup FARGES Clément BOURDARIAS
Tightly-Integrated Visual and Inertial Navigation for Pinpoint Landing on Rugged Terrains PhD student: Jeff DELAUNE ONERA Director: Guy LE BESNERAIS ONERA Advisors: Jean-Loup FARGES Clément BOURDARIAS
Real Time Unattended Object Detection and Tracking Using MATLAB
 Real Time Unattended Object Detection and Tracking Using MATLAB Sagar Sangale 1, Sandip Rahane 2 P.G. Student, Department of Electronics Engineering, Amrutvahini College of Engineering, Sangamner, Maharashtra,
Real Time Unattended Object Detection and Tracking Using MATLAB Sagar Sangale 1, Sandip Rahane 2 P.G. Student, Department of Electronics Engineering, Amrutvahini College of Engineering, Sangamner, Maharashtra,
Outline. Data Association Scenarios. Data Association Scenarios. Data Association Scenarios
 Outline Data Association Scenarios Track Filtering and Gating Global Nearest Neighbor (GNN) Review: Linear Assignment Problem Murthy s k-best Assignments Algorithm Probabilistic Data Association (PDAF)
Outline Data Association Scenarios Track Filtering and Gating Global Nearest Neighbor (GNN) Review: Linear Assignment Problem Murthy s k-best Assignments Algorithm Probabilistic Data Association (PDAF)
Introduction to behavior-recognition and object tracking
 Introduction to behavior-recognition and object tracking Xuan Mo ipal Group Meeting April 22, 2011 Outline Motivation of Behavior-recognition Four general groups of behaviors Core technologies Future direction
Introduction to behavior-recognition and object tracking Xuan Mo ipal Group Meeting April 22, 2011 Outline Motivation of Behavior-recognition Four general groups of behaviors Core technologies Future direction
Lecture 28 Intro to Tracking
 Lecture 28 Intro to Tracking Some overlap with T&V Section 8.4.2 and Appendix A.8 Recall: Blob Merge/Split merge occlusion occlusion split When two objects pass close to each other, they are detected as
Lecture 28 Intro to Tracking Some overlap with T&V Section 8.4.2 and Appendix A.8 Recall: Blob Merge/Split merge occlusion occlusion split When two objects pass close to each other, they are detected as
Recall: Blob Merge/Split Lecture 28
 Recall: Blob Merge/Split Lecture 28 merge occlusion Intro to Tracking Some overlap with T&V Section 8.4.2 and Appendix A.8 occlusion split When two objects pass close to each other, they are detected as
Recall: Blob Merge/Split Lecture 28 merge occlusion Intro to Tracking Some overlap with T&V Section 8.4.2 and Appendix A.8 occlusion split When two objects pass close to each other, they are detected as
Visual Motion Analysis and Tracking Part II
 Visual Motion Analysis and Tracking Part II David J Fleet and Allan D Jepson CIAR NCAP Summer School July 12-16, 16, 2005 Outline Optical Flow and Tracking: Optical flow estimation (robust, iterative refinement,
Visual Motion Analysis and Tracking Part II David J Fleet and Allan D Jepson CIAR NCAP Summer School July 12-16, 16, 2005 Outline Optical Flow and Tracking: Optical flow estimation (robust, iterative refinement,
Snakes, level sets and graphcuts. (Deformable models)
") INSTITUTE OF INFORMATION AND COMMUNICATION TECHNOLOGIES BULGARIAN ACADEMY OF SCIENCE Snakes, level sets and graphcuts (Deformable models) Centro de Visión por Computador, Departament de Matemàtica Aplicada
INSTITUTE OF INFORMATION AND COMMUNICATION TECHNOLOGIES BULGARIAN ACADEMY OF SCIENCE Snakes, level sets and graphcuts (Deformable models) Centro de Visión por Computador, Departament de Matemàtica Aplicada
Evaluation of Moving Object Tracking Techniques for Video Surveillance Applications
 International Journal of Current Engineering and Technology E-ISSN 2277 4106, P-ISSN 2347 5161 2015INPRESSCO, All Rights Reserved Available at http://inpressco.com/category/ijcet Research Article Evaluation
International Journal of Current Engineering and Technology E-ISSN 2277 4106, P-ISSN 2347 5161 2015INPRESSCO, All Rights Reserved Available at http://inpressco.com/category/ijcet Research Article Evaluation
Visual Odometry. Features, Tracking, Essential Matrix, and RANSAC. Stephan Weiss Computer Vision Group NASA-JPL / CalTech
 Visual Odometry Features, Tracking, Essential Matrix, and RANSAC Stephan Weiss Computer Vision Group NASA-JPL / CalTech Stephan.Weiss@ieee.org (c) 2013. Government sponsorship acknowledged. Outline The
Visual Odometry Features, Tracking, Essential Matrix, and RANSAC Stephan Weiss Computer Vision Group NASA-JPL / CalTech Stephan.Weiss@ieee.org (c) 2013. Government sponsorship acknowledged. Outline The
3D Modeling using multiple images Exam January 2008
 3D Modeling using multiple images Exam January 2008 All documents are allowed. Answers should be justified. The different sections below are independant. 1 3D Reconstruction A Robust Approche Consider
3D Modeling using multiple images Exam January 2008 All documents are allowed. Answers should be justified. The different sections below are independant. 1 3D Reconstruction A Robust Approche Consider
Learning and Inferring Depth from Monocular Images. Jiyan Pan April 1, 2009
 Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
Continuous Multi-View Tracking using Tensor Voting
 Continuous Multi-View Tracking using Tensor Voting Jinman Kang, Isaac Cohen and Gerard Medioni Institute for Robotics and Intelligent Systems University of Southern California {jinmanka, icohen, medioni}@iris.usc.edu
Continuous Multi-View Tracking using Tensor Voting Jinman Kang, Isaac Cohen and Gerard Medioni Institute for Robotics and Intelligent Systems University of Southern California {jinmanka, icohen, medioni}@iris.usc.edu
Automated Video Analysis of Crowd Behavior
 Automated Video Analysis of Crowd Behavior Robert Collins CSE Department Mar 30, 2009 Computational Science Seminar Series, Spring 2009. We Are... Lab for Perception, Action and Cognition Research Interest:
Automated Video Analysis of Crowd Behavior Robert Collins CSE Department Mar 30, 2009 Computational Science Seminar Series, Spring 2009. We Are... Lab for Perception, Action and Cognition Research Interest:
Computer Vision 2 Lecture 8
 Computer Vision 2 Lecture 8 Multi-Object Tracking (30.05.2016) leibe@vision.rwth-aachen.de, stueckler@vision.rwth-aachen.de RWTH Aachen University, Computer Vision Group http://www.vision.rwth-aachen.de
Computer Vision 2 Lecture 8 Multi-Object Tracking (30.05.2016) leibe@vision.rwth-aachen.de, stueckler@vision.rwth-aachen.de RWTH Aachen University, Computer Vision Group http://www.vision.rwth-aachen.de
Feature Extraction and Image Processing, 2 nd Edition. Contents. Preface
 , 2 nd Edition Preface ix 1 Introduction 1 1.1 Overview 1 1.2 Human and Computer Vision 1 1.3 The Human Vision System 3 1.3.1 The Eye 4 1.3.2 The Neural System 7 1.3.3 Processing 7 1.4 Computer Vision
, 2 nd Edition Preface ix 1 Introduction 1 1.1 Overview 1 1.2 Human and Computer Vision 1 1.3 The Human Vision System 3 1.3.1 The Eye 4 1.3.2 The Neural System 7 1.3.3 Processing 7 1.4 Computer Vision
COMPUTER AND ROBOT VISION
 VOLUME COMPUTER AND ROBOT VISION Robert M. Haralick University of Washington Linda G. Shapiro University of Washington T V ADDISON-WESLEY PUBLISHING COMPANY Reading, Massachusetts Menlo Park, California
VOLUME COMPUTER AND ROBOT VISION Robert M. Haralick University of Washington Linda G. Shapiro University of Washington T V ADDISON-WESLEY PUBLISHING COMPANY Reading, Massachusetts Menlo Park, California
Chapter 3 Image Registration. Chapter 3 Image Registration
 Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
Local Feature Detectors
 Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
Outline 7/2/201011/6/
 Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
A Sparsity-Driven Approach to Multi-camera Tracking in Visual Sensor Networks
 A Sparsity-Driven Approach to Multi-camera Tracking in Visual Sensor Networks Serhan Coşar a,b a INRIA Sophia Antipolis, STARS team 2004 R. des Lucioles, 06902 S. Antipolis, France serhan.cosar@inria.fr
A Sparsity-Driven Approach to Multi-camera Tracking in Visual Sensor Networks Serhan Coşar a,b a INRIA Sophia Antipolis, STARS team 2004 R. des Lucioles, 06902 S. Antipolis, France serhan.cosar@inria.fr
Final Exam Study Guide
 Final Exam Study Guide Exam Window: 28th April, 12:00am EST to 30th April, 11:59pm EST Description As indicated in class the goal of the exam is to encourage you to review the material from the course.
Final Exam Study Guide Exam Window: 28th April, 12:00am EST to 30th April, 11:59pm EST Description As indicated in class the goal of the exam is to encourage you to review the material from the course.
Mean shift based object tracking with accurate centroid estimation and adaptive Kernel bandwidth
 Mean shift based object tracking with accurate centroid estimation and adaptive Kernel bandwidth ShilpaWakode 1, Dr. Krishna Warhade 2, Dr. Vijay Wadhai 3, Dr. Nitin Choudhari 4 1234 Electronics department
Mean shift based object tracking with accurate centroid estimation and adaptive Kernel bandwidth ShilpaWakode 1, Dr. Krishna Warhade 2, Dr. Vijay Wadhai 3, Dr. Nitin Choudhari 4 1234 Electronics department
Mixture Models and EM
 Mixture Models and EM Goal: Introduction to probabilistic mixture models and the expectationmaximization (EM) algorithm. Motivation: simultaneous fitting of multiple model instances unsupervised clustering
Mixture Models and EM Goal: Introduction to probabilistic mixture models and the expectationmaximization (EM) algorithm. Motivation: simultaneous fitting of multiple model instances unsupervised clustering
Patch-based Object Recognition. Basic Idea
 Patch-based Object Recognition 1! Basic Idea Determine interest points in image Determine local image properties around interest points Use local image properties for object classification Example: Interest
Patch-based Object Recognition 1! Basic Idea Determine interest points in image Determine local image properties around interest points Use local image properties for object classification Example: Interest
From Structure-from-Motion Point Clouds to Fast Location Recognition
 From Structure-from-Motion Point Clouds to Fast Location Recognition Arnold Irschara1;2, Christopher Zach2, Jan-Michael Frahm2, Horst Bischof1 1Graz University of Technology firschara, bischofg@icg.tugraz.at
From Structure-from-Motion Point Clouds to Fast Location Recognition Arnold Irschara1;2, Christopher Zach2, Jan-Michael Frahm2, Horst Bischof1 1Graz University of Technology firschara, bischofg@icg.tugraz.at
Contents I IMAGE FORMATION 1
 Contents I IMAGE FORMATION 1 1 Geometric Camera Models 3 1.1 Image Formation............................. 4 1.1.1 Pinhole Perspective....................... 4 1.1.2 Weak Perspective.........................
Contents I IMAGE FORMATION 1 1 Geometric Camera Models 3 1.1 Image Formation............................. 4 1.1.1 Pinhole Perspective....................... 4 1.1.2 Weak Perspective.........................
Local invariant features
 Local invariant features Tuesday, Oct 28 Kristen Grauman UT-Austin Today Some more Pset 2 results Pset 2 returned, pick up solutions Pset 3 is posted, due 11/11 Local invariant features Detection of interest
Local invariant features Tuesday, Oct 28 Kristen Grauman UT-Austin Today Some more Pset 2 results Pset 2 returned, pick up solutions Pset 3 is posted, due 11/11 Local invariant features Detection of interest
Continuous Multi-Views Tracking using Tensor Voting
 Continuous Multi-Views racking using ensor Voting Jinman Kang, Isaac Cohen and Gerard Medioni Institute for Robotics and Intelligent Systems University of Southern California Los Angeles, CA 90089-073.
Continuous Multi-Views racking using ensor Voting Jinman Kang, Isaac Cohen and Gerard Medioni Institute for Robotics and Intelligent Systems University of Southern California Los Angeles, CA 90089-073.
CS 223B Computer Vision Problem Set 3
 CS 223B Computer Vision Problem Set 3 Due: Feb. 22 nd, 2011 1 Probabilistic Recursion for Tracking In this problem you will derive a method for tracking a point of interest through a sequence of images.
CS 223B Computer Vision Problem Set 3 Due: Feb. 22 nd, 2011 1 Probabilistic Recursion for Tracking In this problem you will derive a method for tracking a point of interest through a sequence of images.
Image processing and features
 Image processing and features Gabriele Bleser gabriele.bleser@dfki.de Thanks to Harald Wuest, Folker Wientapper and Marc Pollefeys Introduction Previous lectures: geometry Pose estimation Epipolar geometry
Image processing and features Gabriele Bleser gabriele.bleser@dfki.de Thanks to Harald Wuest, Folker Wientapper and Marc Pollefeys Introduction Previous lectures: geometry Pose estimation Epipolar geometry
arxiv: v1 [cs.cv] 28 Sep 2018
![arxiv: v1 [cs.cv] 28 Sep 2018](/thumbs/93/113542646.jpg "arxiv: v1 [cs.cv] 28 Sep 2018") Camera Pose Estimation from Sequence of Calibrated Images arxiv:1809.11066v1 [cs.cv] 28 Sep 2018 Jacek Komorowski 1 and Przemyslaw Rokita 2 1 Maria Curie-Sklodowska University, Institute of Computer Science,
Camera Pose Estimation from Sequence of Calibrated Images arxiv:1809.11066v1 [cs.cv] 28 Sep 2018 Jacek Komorowski 1 and Przemyslaw Rokita 2 1 Maria Curie-Sklodowska University, Institute of Computer Science,
Automatic Tracking of Moving Objects in Video for Surveillance Applications
 Automatic Tracking of Moving Objects in Video for Surveillance Applications Manjunath Narayana Committee: Dr. Donna Haverkamp (Chair) Dr. Arvin Agah Dr. James Miller Department of Electrical Engineering
Automatic Tracking of Moving Objects in Video for Surveillance Applications Manjunath Narayana Committee: Dr. Donna Haverkamp (Chair) Dr. Arvin Agah Dr. James Miller Department of Electrical Engineering
A Fast Moving Object Detection Technique In Video Surveillance System
 A Fast Moving Object Detection Technique In Video Surveillance System Paresh M. Tank, Darshak G. Thakore, Computer Engineering Department, BVM Engineering College, VV Nagar-388120, India. Abstract Nowadays
A Fast Moving Object Detection Technique In Video Surveillance System Paresh M. Tank, Darshak G. Thakore, Computer Engineering Department, BVM Engineering College, VV Nagar-388120, India. Abstract Nowadays
Visuelle Perzeption für Mensch- Maschine Schnittstellen
 Visuelle Perzeption für Mensch- Maschine Schnittstellen Vorlesung, WS 2009 Prof. Dr. Rainer Stiefelhagen Dr. Edgar Seemann Institut für Anthropomatik Universität Karlsruhe (TH) http://cvhci.ira.uka.de
Visuelle Perzeption für Mensch- Maschine Schnittstellen Vorlesung, WS 2009 Prof. Dr. Rainer Stiefelhagen Dr. Edgar Seemann Institut für Anthropomatik Universität Karlsruhe (TH) http://cvhci.ira.uka.de
Topological Mapping. Discrete Bayes Filter
 Topological Mapping Discrete Bayes Filter Vision Based Localization Given a image(s) acquired by moving camera determine the robot s location and pose? Towards localization without odometry What can be
Topological Mapping Discrete Bayes Filter Vision Based Localization Given a image(s) acquired by moving camera determine the robot s location and pose? Towards localization without odometry What can be
Improving Vision-based Topological Localization by Combining Local and Global Image Features
 Improving Vision-based Topological Localization by Combining Local and Global Image Features Shuai Yang and Han Wang Nanyang Technological University, Singapore Introduction Self-localization is crucial
Improving Vision-based Topological Localization by Combining Local and Global Image Features Shuai Yang and Han Wang Nanyang Technological University, Singapore Introduction Self-localization is crucial
Estimation of common groundplane based on co-motion statistics
 Estimation of common groundplane based on co-motion statistics Zoltan Szlavik, Laszlo Havasi 2, Tamas Sziranyi Analogical and Neural Computing Laboratory, Computer and Automation Research Institute of
Estimation of common groundplane based on co-motion statistics Zoltan Szlavik, Laszlo Havasi 2, Tamas Sziranyi Analogical and Neural Computing Laboratory, Computer and Automation Research Institute of
Combining Appearance and Topology for Wide
 Combining Appearance and Topology for Wide Baseline Matching Dennis Tell and Stefan Carlsson Presented by: Josh Wills Image Point Correspondences Critical foundation for many vision applications 3-D reconstruction,
Combining Appearance and Topology for Wide Baseline Matching Dennis Tell and Stefan Carlsson Presented by: Josh Wills Image Point Correspondences Critical foundation for many vision applications 3-D reconstruction,
BSB663 Image Processing Pinar Duygulu. Slides are adapted from Selim Aksoy
 BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
Combining Multiple Tracking Modalities for Vehicle Tracking in Traffic Intersections
 Combining Multiple Tracking Modalities for Vehicle Tracking in Traffic Intersections Harini Veeraraghavan Nikolaos Papanikolopoulos Artificial Intelligence, Vision and Robotics Lab Department of Computer
Combining Multiple Tracking Modalities for Vehicle Tracking in Traffic Intersections Harini Veeraraghavan Nikolaos Papanikolopoulos Artificial Intelligence, Vision and Robotics Lab Department of Computer
Multi-Targets Tracking Based on Bipartite Graph Matching
 BULGARIAN ACADEMY OF SCIENCES CYBERNETICS AND INFORMATION TECHNOLOGIES Volume 14, Special Issue Sofia 014 Print ISSN: 1311-970; Online ISSN: 1314-4081 DOI: 10.478/cait-014-0045 Multi-Targets Tracking Based
BULGARIAN ACADEMY OF SCIENCES CYBERNETICS AND INFORMATION TECHNOLOGIES Volume 14, Special Issue Sofia 014 Print ISSN: 1311-970; Online ISSN: 1314-4081 DOI: 10.478/cait-014-0045 Multi-Targets Tracking Based
The Kinect Sensor. Luís Carriço FCUL 2014/15
 Advanced Interaction Techniques The Kinect Sensor Luís Carriço FCUL 2014/15 Sources: MS Kinect for Xbox 360 John C. Tang. Using Kinect to explore NUI, Ms Research, From Stanford CS247 Shotton et al. Real-Time
Advanced Interaction Techniques The Kinect Sensor Luís Carriço FCUL 2014/15 Sources: MS Kinect for Xbox 360 John C. Tang. Using Kinect to explore NUI, Ms Research, From Stanford CS247 Shotton et al. Real-Time
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014
 SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
CS231N Section. Video Understanding 6/1/2018
 CS231N Section Video Understanding 6/1/2018 Outline Background / Motivation / History Video Datasets Models Pre-deep learning CNN + RNN 3D convolution Two-stream What we ve seen in class so far... Image
CS231N Section Video Understanding 6/1/2018 Outline Background / Motivation / History Video Datasets Models Pre-deep learning CNN + RNN 3D convolution Two-stream What we ve seen in class so far... Image
Target Tracking Using Mean-Shift And Affine Structure
 Target Tracking Using Mean-Shift And Affine Structure Chuan Zhao, Andrew Knight and Ian Reid Department of Engineering Science, University of Oxford, Oxford, UK {zhao, ian}@robots.ox.ac.uk Abstract Inthispaper,wepresentanewapproachfortracking
Target Tracking Using Mean-Shift And Affine Structure Chuan Zhao, Andrew Knight and Ian Reid Department of Engineering Science, University of Oxford, Oxford, UK {zhao, ian}@robots.ox.ac.uk Abstract Inthispaper,wepresentanewapproachfortracking
Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation
 Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
Pedestrian Group Tracking Using the GM-PHD Filter
 EUSIPCO 2013, Marrakech, Morocco 1(15) Pedestrian Group Tracking Using the GM-PHD Filter Viktor Edman, Maria Andersson, Karl Granström, Fredrik Gustafsson SAAB AB, Linköping, Sweden Division of Sensor
EUSIPCO 2013, Marrakech, Morocco 1(15) Pedestrian Group Tracking Using the GM-PHD Filter Viktor Edman, Maria Andersson, Karl Granström, Fredrik Gustafsson SAAB AB, Linköping, Sweden Division of Sensor
Pedestrian Detection with Radar and Computer Vision
 Pedestrian Detection with Radar and Computer Vision camera radar sensor Stefan Milch, Marc Behrens, Darmstadt, September 25 25 / 26, 2001 Pedestrian accidents and protection systems Impact zone: 10% opposite
Pedestrian Detection with Radar and Computer Vision camera radar sensor Stefan Milch, Marc Behrens, Darmstadt, September 25 25 / 26, 2001 Pedestrian accidents and protection systems Impact zone: 10% opposite
Loop detection and extended target tracking using laser data
 Licentiate seminar 1(39) Loop detection and extended target tracking using laser data Karl Granström Division of Automatic Control Department of Electrical Engineering Linköping University Linköping, Sweden
Licentiate seminar 1(39) Loop detection and extended target tracking using laser data Karl Granström Division of Automatic Control Department of Electrical Engineering Linköping University Linköping, Sweden
Automatic visual recognition for metro surveillance
 Automatic visual recognition for metro surveillance F. Cupillard, M. Thonnat, F. Brémond Orion Research Group, INRIA, Sophia Antipolis, France Abstract We propose in this paper an approach for recognizing
Automatic visual recognition for metro surveillance F. Cupillard, M. Thonnat, F. Brémond Orion Research Group, INRIA, Sophia Antipolis, France Abstract We propose in this paper an approach for recognizing
Classifying Images with Visual/Textual Cues. By Steven Kappes and Yan Cao
 Classifying Images with Visual/Textual Cues By Steven Kappes and Yan Cao Motivation Image search Building large sets of classified images Robotics Background Object recognition is unsolved Deformable shaped
Classifying Images with Visual/Textual Cues By Steven Kappes and Yan Cao Motivation Image search Building large sets of classified images Robotics Background Object recognition is unsolved Deformable shaped
CS231A Section 6: Problem Set 3
 CS231A Section 6: Problem Set 3 Kevin Wong Review 6 -! 1 11/09/2012 Announcements PS3 Due 2:15pm Tuesday, Nov 13 Extra Office Hours: Friday 6 8pm Huang Common Area, Basement Level. Review 6 -! 2 Topics
CS231A Section 6: Problem Set 3 Kevin Wong Review 6 -! 1 11/09/2012 Announcements PS3 Due 2:15pm Tuesday, Nov 13 Extra Office Hours: Friday 6 8pm Huang Common Area, Basement Level. Review 6 -! 2 Topics
Video Google: A Text Retrieval Approach to Object Matching in Videos
 Video Google: A Text Retrieval Approach to Object Matching in Videos Josef Sivic, Frederik Schaffalitzky, Andrew Zisserman Visual Geometry Group University of Oxford The vision Enable video, e.g. a feature
Video Google: A Text Retrieval Approach to Object Matching in Videos Josef Sivic, Frederik Schaffalitzky, Andrew Zisserman Visual Geometry Group University of Oxford The vision Enable video, e.g. a feature
CHAPTER 1 Introduction 1. CHAPTER 2 Images, Sampling and Frequency Domain Processing 37
 Extended Contents List Preface... xi About the authors... xvii CHAPTER 1 Introduction 1 1.1 Overview... 1 1.2 Human and Computer Vision... 2 1.3 The Human Vision System... 4 1.3.1 The Eye... 5 1.3.2 The
Extended Contents List Preface... xi About the authors... xvii CHAPTER 1 Introduction 1 1.1 Overview... 1 1.2 Human and Computer Vision... 2 1.3 The Human Vision System... 4 1.3.1 The Eye... 5 1.3.2 The
Probabilistic Head Pose Tracking Evaluation in Single and Multiple Camera Setups
 Probabilistic Head Pose Tracking Evaluation in Single and Multiple Camera Setups Sileye O. Ba 1 and Jean-Marc Odobez 1 IDIAP Research Institute, Martigny, Switzerland Abstract. This paper presents our
Probabilistic Head Pose Tracking Evaluation in Single and Multiple Camera Setups Sileye O. Ba 1 and Jean-Marc Odobez 1 IDIAP Research Institute, Martigny, Switzerland Abstract. This paper presents our
Augmented Reality VU. Computer Vision 3D Registration (2) Prof. Vincent Lepetit
 Prof. Vincent Lepetit") Augmented Reality VU Computer Vision 3D Registration (2) Prof. Vincent Lepetit Feature Point-Based 3D Tracking Feature Points for 3D Tracking Much less ambiguous than edges; Point-to-point reprojection
Augmented Reality VU Computer Vision 3D Registration (2) Prof. Vincent Lepetit Feature Point-Based 3D Tracking Feature Points for 3D Tracking Much less ambiguous than edges; Point-to-point reprojection
Fundamental Matrices from Moving Objects Using Line Motion Barcodes
 Fundamental Matrices from Moving Objects Using Line Motion Barcodes Yoni Kasten (B), Gil Ben-Artzi, Shmuel Peleg, and Michael Werman School of Computer Science and Engineering, The Hebrew University of
Fundamental Matrices from Moving Objects Using Line Motion Barcodes Yoni Kasten (B), Gil Ben-Artzi, Shmuel Peleg, and Michael Werman School of Computer Science and Engineering, The Hebrew University of
Thiruvarangan Ramaraj CS525 Graphics & Scientific Visualization Spring 2007, Presentation I, February 28 th 2007, 14:10 15:00. Topic (Research Paper):
:") Thiruvarangan Ramaraj CS525 Graphics & Scientific Visualization Spring 2007, Presentation I, February 28 th 2007, 14:10 15:00 Topic (Research Paper): Jinxian Chai and Jessica K. Hodgins, Performance Animation
Thiruvarangan Ramaraj CS525 Graphics & Scientific Visualization Spring 2007, Presentation I, February 28 th 2007, 14:10 15:00 Topic (Research Paper): Jinxian Chai and Jessica K. Hodgins, Performance Animation
Probabilistic Tracking and Reconstruction of 3D Human Motion in Monocular Video Sequences
 Probabilistic Tracking and Reconstruction of 3D Human Motion in Monocular Video Sequences Presentation of the thesis work of: Hedvig Sidenbladh, KTH Thesis opponent: Prof. Bill Freeman, MIT Thesis supervisors
Probabilistic Tracking and Reconstruction of 3D Human Motion in Monocular Video Sequences Presentation of the thesis work of: Hedvig Sidenbladh, KTH Thesis opponent: Prof. Bill Freeman, MIT Thesis supervisors
3D object recognition used by team robotto
 3D object recognition used by team robotto Workshop Juliane Hoebel February 1, 2016 Faculty of Computer Science, Otto-von-Guericke University Magdeburg Content 1. Introduction 2. Depth sensor 3. 3D object
3D object recognition used by team robotto Workshop Juliane Hoebel February 1, 2016 Faculty of Computer Science, Otto-von-Guericke University Magdeburg Content 1. Introduction 2. Depth sensor 3. 3D object
A Dynamic Human Model using Hybrid 2D-3D Representations in Hierarchical PCA Space
 A Dynamic Human Model using Hybrid 2D-3D Representations in Hierarchical PCA Space Eng-Jon Ong and Shaogang Gong Department of Computer Science, Queen Mary and Westfield College, London E1 4NS, UK fongej
A Dynamic Human Model using Hybrid 2D-3D Representations in Hierarchical PCA Space Eng-Jon Ong and Shaogang Gong Department of Computer Science, Queen Mary and Westfield College, London E1 4NS, UK fongej
Particle Filtering. CS6240 Multimedia Analysis. Leow Wee Kheng. Department of Computer Science School of Computing National University of Singapore
 Particle Filtering CS6240 Multimedia Analysis Leow Wee Kheng Department of Computer Science School of Computing National University of Singapore (CS6240) Particle Filtering 1 / 28 Introduction Introduction
Particle Filtering CS6240 Multimedia Analysis Leow Wee Kheng Department of Computer Science School of Computing National University of Singapore (CS6240) Particle Filtering 1 / 28 Introduction Introduction
CS 231A Computer Vision (Fall 2012) Problem Set 3
 Problem Set 3") CS 231A Computer Vision (Fall 2012) Problem Set 3 Due: Nov. 13 th, 2012 (2:15pm) 1 Probabilistic Recursion for Tracking (20 points) In this problem you will derive a method for tracking a point of interest
CS 231A Computer Vision (Fall 2012) Problem Set 3 Due: Nov. 13 th, 2012 (2:15pm) 1 Probabilistic Recursion for Tracking (20 points) In this problem you will derive a method for tracking a point of interest
Switching Hypothesized Measurements: A Dynamic Model with Applications to Occlusion Adaptive Joint Tracking
 Switching Hypothesized Measurements: A Dynamic Model with Applications to Occlusion Adaptive Joint Tracking Yang Wang Tele Tan Institute for Infocomm Research, Singapore {ywang, telctan}@i2r.a-star.edu.sg
Switching Hypothesized Measurements: A Dynamic Model with Applications to Occlusion Adaptive Joint Tracking Yang Wang Tele Tan Institute for Infocomm Research, Singapore {ywang, telctan}@i2r.a-star.edu.sg
WP1: Video Data Analysis
 Leading : UNICT Participant: UEDIN Fish4Knowledge Final Review Meeting - November 29, 2013 - Luxembourg Workpackage 1 Objectives Fish Detection: Background/foreground modeling algorithms able to deal with
Leading : UNICT Participant: UEDIN Fish4Knowledge Final Review Meeting - November 29, 2013 - Luxembourg Workpackage 1 Objectives Fish Detection: Background/foreground modeling algorithms able to deal with
Object and Class Recognition I:
 Object and Class Recognition I: Object Recognition Lectures 10 Sources ICCV 2005 short courses Li Fei-Fei (UIUC), Rob Fergus (Oxford-MIT), Antonio Torralba (MIT) http://people.csail.mit.edu/torralba/iccv2005
Object and Class Recognition I: Object Recognition Lectures 10 Sources ICCV 2005 short courses Li Fei-Fei (UIUC), Rob Fergus (Oxford-MIT), Antonio Torralba (MIT) http://people.csail.mit.edu/torralba/iccv2005
Planetary Rover Absolute Localization by Combining Visual Odometry with Orbital Image Measurements
 Planetary Rover Absolute Localization by Combining Visual Odometry with Orbital Image Measurements M. Lourakis and E. Hourdakis Institute of Computer Science Foundation for Research and Technology Hellas
Planetary Rover Absolute Localization by Combining Visual Odometry with Orbital Image Measurements M. Lourakis and E. Hourdakis Institute of Computer Science Foundation for Research and Technology Hellas
Performance Evaluation Metrics and Statistics for Positional Tracker Evaluation
 Performance Evaluation Metrics and Statistics for Positional Tracker Evaluation Chris J. Needham and Roger D. Boyle School of Computing, The University of Leeds, Leeds, LS2 9JT, UK {chrisn,roger}@comp.leeds.ac.uk
Performance Evaluation Metrics and Statistics for Positional Tracker Evaluation Chris J. Needham and Roger D. Boyle School of Computing, The University of Leeds, Leeds, LS2 9JT, UK {chrisn,roger}@comp.leeds.ac.uk
Structured light 3D reconstruction
 Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
PERFORMANCE CAPTURE FROM SPARSE MULTI-VIEW VIDEO
 Stefan Krauß, Juliane Hüttl SE, SoSe 2011, HU-Berlin PERFORMANCE CAPTURE FROM SPARSE MULTI-VIEW VIDEO 1 Uses of Motion/Performance Capture movies games, virtual environments biomechanics, sports science,
Stefan Krauß, Juliane Hüttl SE, SoSe 2011, HU-Berlin PERFORMANCE CAPTURE FROM SPARSE MULTI-VIEW VIDEO 1 Uses of Motion/Performance Capture movies games, virtual environments biomechanics, sports science,
Face Tracking. Synonyms. Definition. Main Body Text. Amit K. Roy-Chowdhury and Yilei Xu. Facial Motion Estimation
 Face Tracking Amit K. Roy-Chowdhury and Yilei Xu Department of Electrical Engineering, University of California, Riverside, CA 92521, USA {amitrc,yxu}@ee.ucr.edu Synonyms Facial Motion Estimation Definition
Face Tracking Amit K. Roy-Chowdhury and Yilei Xu Department of Electrical Engineering, University of California, Riverside, CA 92521, USA {amitrc,yxu}@ee.ucr.edu Synonyms Facial Motion Estimation Definition
CAP 6412 Advanced Computer Vision
 CAP 6412 Advanced Computer Vision http://www.cs.ucf.edu/~bgong/cap6412.html Boqing Gong April 21st, 2016 Today Administrivia Free parameters in an approach, model, or algorithm? Egocentric videos by Aisha
CAP 6412 Advanced Computer Vision http://www.cs.ucf.edu/~bgong/cap6412.html Boqing Gong April 21st, 2016 Today Administrivia Free parameters in an approach, model, or algorithm? Egocentric videos by Aisha
Multi-Person Tracking-by-Detection based on Calibrated Multi-Camera Systems
 Multi-Person Tracking-by-Detection based on Calibrated Multi-Camera Systems Xiaoyan Jiang, Erik Rodner, and Joachim Denzler Computer Vision Group Jena Friedrich Schiller University of Jena {xiaoyan.jiang,erik.rodner,joachim.denzler}@uni-jena.de
Multi-Person Tracking-by-Detection based on Calibrated Multi-Camera Systems Xiaoyan Jiang, Erik Rodner, and Joachim Denzler Computer Vision Group Jena Friedrich Schiller University of Jena {xiaoyan.jiang,erik.rodner,joachim.denzler}@uni-jena.de
Overview. Related Work Tensor Voting in 2-D Tensor Voting in 3-D Tensor Voting in N-D Application to Vision Problems Stereo Visual Motion
 Overview Related Work Tensor Voting in 2-D Tensor Voting in 3-D Tensor Voting in N-D Application to Vision Problems Stereo Visual Motion Binary-Space-Partitioned Images 3-D Surface Extraction from Medical
Overview Related Work Tensor Voting in 2-D Tensor Voting in 3-D Tensor Voting in N-D Application to Vision Problems Stereo Visual Motion Binary-Space-Partitioned Images 3-D Surface Extraction from Medical
Segmentation, Classification &Tracking of Humans for Smart Airbag Applications
 Segmentation, Classification &Tracking of Humans for Smart Airbag Applications Dr. Michael E. Farmer Dept. of Computer Science, Engineering Science, and Physics University of Michigan-Flint Importance
Segmentation, Classification &Tracking of Humans for Smart Airbag Applications Dr. Michael E. Farmer Dept. of Computer Science, Engineering Science, and Physics University of Michigan-Flint Importance
Scale-invariant visual tracking by particle filtering
 Scale-invariant visual tracing by particle filtering Arie Nahmani* a, Allen Tannenbaum a,b a Dept. of Electrical Engineering, Technion - Israel Institute of Technology, Haifa 32000, Israel b Schools of
Scale-invariant visual tracing by particle filtering Arie Nahmani* a, Allen Tannenbaum a,b a Dept. of Electrical Engineering, Technion - Israel Institute of Technology, Haifa 32000, Israel b Schools of
Adaptive Background Mixture Models for Real-Time Tracking
 Adaptive Background Mixture Models for Real-Time Tracking Chris Stauffer and W.E.L Grimson CVPR 1998 Brendan Morris http://www.ee.unlv.edu/~b1morris/ecg782/ 2 Motivation Video monitoring and surveillance
Adaptive Background Mixture Models for Real-Time Tracking Chris Stauffer and W.E.L Grimson CVPR 1998 Brendan Morris http://www.ee.unlv.edu/~b1morris/ecg782/ 2 Motivation Video monitoring and surveillance
New approaches to pattern recognition and automated learning
 Z Y X New approaches to pattern recognition and automated learning Technology Forum 2015 Johannes Zuegner STEMMER IMAGING GmbH, Puchheim, Germany OUTLINE Introduction Description of the task What does
Z Y X New approaches to pattern recognition and automated learning Technology Forum 2015 Johannes Zuegner STEMMER IMAGING GmbH, Puchheim, Germany OUTLINE Introduction Description of the task What does
Epipolar Geometry in Stereo, Motion and Object Recognition
 Epipolar Geometry in Stereo, Motion and Object Recognition A Unified Approach by GangXu Department of Computer Science, Ritsumeikan University, Kusatsu, Japan and Zhengyou Zhang INRIA Sophia-Antipolis,
Epipolar Geometry in Stereo, Motion and Object Recognition A Unified Approach by GangXu Department of Computer Science, Ritsumeikan University, Kusatsu, Japan and Zhengyou Zhang INRIA Sophia-Antipolis,
Multi-feature graph-based object tracking
 Multi-feature graph-based object tracking Murtaza Taj, Emilio Maggio, and Andrea Cavallaro Queen Mary, University of London Mile End Road, London E1 4NS (United Kingdom) {murtaza.taj,emilio.maggio,andrea.cavallaro}@elec.qmul.ac.uk,
Multi-feature graph-based object tracking Murtaza Taj, Emilio Maggio, and Andrea Cavallaro Queen Mary, University of London Mile End Road, London E1 4NS (United Kingdom) {murtaza.taj,emilio.maggio,andrea.cavallaro}@elec.qmul.ac.uk,
AN OPTIMISED FRAME WORK FOR MOVING TARGET DETECTION FOR UAV APPLICATION
 AN OPTIMISED FRAME WORK FOR MOVING TARGET DETECTION FOR UAV APPLICATION Md. Shahid, Pooja HR # Aeronautical Development Establishment(ADE), Defence Research and development Organization(DRDO), Bangalore
AN OPTIMISED FRAME WORK FOR MOVING TARGET DETECTION FOR UAV APPLICATION Md. Shahid, Pooja HR # Aeronautical Development Establishment(ADE), Defence Research and development Organization(DRDO), Bangalore
Tracking. Hao Guan( 管皓 ) School of Computer Science Fudan University
 School of Computer Science Fudan University") Tracking Hao Guan( 管皓 ) School of Computer Science Fudan University 2014-09-29 Multimedia Video Audio Use your eyes Video Tracking Use your ears Audio Tracking Tracking Video Tracking Definition Given
Tracking Hao Guan( 管皓 ) School of Computer Science Fudan University 2014-09-29 Multimedia Video Audio Use your eyes Video Tracking Use your ears Audio Tracking Tracking Video Tracking Definition Given
C. Premsai 1, Prof. A. Kavya 2 School of Computer Science, School of Computer Science Engineering, Engineering VIT Chennai, VIT Chennai
 Traffic Sign Detection Via Graph-Based Ranking and Segmentation Algorithm C. Premsai 1, Prof. A. Kavya 2 School of Computer Science, School of Computer Science Engineering, Engineering VIT Chennai, VIT
Traffic Sign Detection Via Graph-Based Ranking and Segmentation Algorithm C. Premsai 1, Prof. A. Kavya 2 School of Computer Science, School of Computer Science Engineering, Engineering VIT Chennai, VIT
Live Metric 3D Reconstruction on Mobile Phones ICCV 2013
 Live Metric 3D Reconstruction on Mobile Phones ICCV 2013 Main Contents 1. Target & Related Work 2. Main Features of This System 3. System Overview & Workflow 4. Detail of This System 5. Experiments 6.
Live Metric 3D Reconstruction on Mobile Phones ICCV 2013 Main Contents 1. Target & Related Work 2. Main Features of This System 3. System Overview & Workflow 4. Detail of This System 5. Experiments 6.
Multiple-Choice Questionnaire Group C
 Family name: Vision and Machine-Learning Given name: 1/28/2011 Multiple-Choice naire Group C No documents authorized. There can be several right answers to a question. Marking-scheme: 2 points if all right
Family name: Vision and Machine-Learning Given name: 1/28/2011 Multiple-Choice naire Group C No documents authorized. There can be several right answers to a question. Marking-scheme: 2 points if all right
Extended target tracking using PHD filters
 Ulm University 2014 01 29 1(35) With applications to video data and laser range data Division of Automatic Control Department of Electrical Engineering Linöping university Linöping, Sweden Presentation
Ulm University 2014 01 29 1(35) With applications to video data and laser range data Division of Automatic Control Department of Electrical Engineering Linöping university Linöping, Sweden Presentation
Object Category Detection. Slides mostly from Derek Hoiem
 Object Category Detection Slides mostly from Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical template matching with sliding window Part-based Models
Object Category Detection Slides mostly from Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical template matching with sliding window Part-based Models
CSE 252B: Computer Vision II
 CSE 252B: Computer Vision II Lecturer: Serge Belongie Scribes: Jeremy Pollock and Neil Alldrin LECTURE 14 Robust Feature Matching 14.1. Introduction Last lecture we learned how to find interest points
CSE 252B: Computer Vision II Lecturer: Serge Belongie Scribes: Jeremy Pollock and Neil Alldrin LECTURE 14 Robust Feature Matching 14.1. Introduction Last lecture we learned how to find interest points