Depth from Stereo. Sanja Fidler CSC420: Intro to Image Understanding 1/ 12
|
|
|
- Jonathan Weaver
- 6 years ago
- Views:
Transcription
1 Depth from Stereo Sanja Fidler CSC420: Intro to Image Understanding 1/ 12
2 Depth from Two Views: Stereo All points on projective line to P map to p Figure: One camera Sanja Fidler CSC420: Intro to Image Understanding 2/ 12
3 Depth from Two Views: Stereo All points on projective line to P in left camera map to a line in the image plane of the right camera Figure: Add another camera Sanja Fidler CSC420: Intro to Image Understanding 2/ 12
4 Depth from Two Views: Stereo If I search this line to find correspondences... Figure: If I am able to find corresponding points in two images... Sanja Fidler CSC420: Intro to Image Understanding 2/ 12
5 Depth from Two Views: Stereo I can get 3D! Figure: I can get a point in 3D by triangulation! Sanja Fidler CSC420: Intro to Image Understanding 2/ 12
6 Stereo Epipolar geometry Case with two cameras with parallel optical axes General case Sanja Fidler CSC420: Intro to Image Understanding 3/ 12
7 Stereo Epipolar geometry Case with two cameras with parallel optical axes First this General case Sanja Fidler CSC420: Intro to Image Understanding 3/ 12
8 We assume that the two calibrated cameras (we know intrinsics and extrinsics) are parallel, i.e. the right camera is just some distance to the right of left camera. We assume we know this distance. We call it the baseline. Sanja Fidler CSC420: Intro to Image Understanding 4/ 12
9 Pick a point P in the world Sanja Fidler CSC420: Intro to Image Understanding 4/ 12
, the lines O l O r and p l p r are")
10 Points O l, O r and P (and p l and p r ) lie on a plane. Since two image planes lie on the same plane (distance f from each camera), the lines O l O r and p l p r are parallel. Sanja Fidler CSC420: Intro to Image Understanding 4/ 12
11 Since lines O l O r and p l p r are parallel, and O l and O r have the same y, then also p l and p r have the same y: y r = y l! Sanja Fidler CSC420: Intro to Image Understanding 4/ 12
12 So all points on the projective line O l p l project to a horizontal line with y = y l on the right image. This is nice, let s remember this. Sanja Fidler CSC420: Intro to Image Understanding 4/ 12
13 Another observation: No point from O l p l can project to the right of x l in the right image. Why? Sanja Fidler CSC420: Intro to Image Understanding 4/ 12
14 Because that would mean our image can see behind the camera... Sanja Fidler CSC420: Intro to Image Understanding 4/ 12
15 Since our points p l and p r lie on a horizontal line, we can forget about y l for a moment (it doesn t seem important). Let s look at the camera situation from the birdseye perspective instead. Let s see if we can find a connection between x l, x r and Z (because Z is what we want). [Adopted from: J. Hays] Sanja Fidler CSC420: Intro to Image Understanding 5/ 12
16 We can then use similar triangles to compute the depth of the point P [Adopted from: J. Hays] Sanja Fidler CSC420: Intro to Image Understanding 5/ 12
17 We can then use similar triangles to compute the depth of the point P Sanja Fidler CSC420: Intro to Image Understanding 5/ 12
18 We can then use similar triangles to compute the depth of the point P Sanja Fidler CSC420: Intro to Image Understanding 5/ 12
19 For each point p l =(x l, y l ), how do I get p r =(x r, y r )? Sanja Fidler CSC420: Intro to Image Understanding 6/ 12

20 For each point p l =(x l, y l ), how do I get p r =(x r, y r )? By matching on line y r = y l. Sanja Fidler CSC420: Intro to Image Understanding 6/ 12
21 For each point p l =(x l, y l ), how do I get p r =(x r, y r )? By matching on line y r = y l. Sanja Fidler CSC420: Intro to Image Understanding 6/ 12
22 For each point p l =(x l, y l ), how do I get p r =(x r, y r )? By matching. Patch around (x r, y r )) should look similar to the patch around (x l, y l ). Sanja Fidler CSC420: Intro to Image Understanding 6/ 12
23 For each point p l =(x l, y l ), how do I get p r =(x r, y r )? By matching. Patch around (x r, y r )) should look similar to the patch around (x l, y l ). Sanja Fidler CSC420: Intro to Image Understanding 6/ 12
24 For each point p l =(x l, y l ), how do I get p r =(x r, y r )? By matching. Patch around (x r, y r )) should look similar to the patch around (x l, y l ). Sanja Fidler CSC420: Intro to Image Understanding 6/ 12
25 For each point p l =(x l, y l ), how do I get p r =(x r, y r )? By matching. Patch around (x r, y r )) should look similar to the patch around (x l, y l ). Sanja Fidler CSC420: Intro to Image Understanding 6/ 12
26 For each point p l =(x l, y l ), how do I get p r =(x r, y r )? By matching. Patch around (x r, y r )) should look similar to the patch around (x l, y l ). Sanja Fidler CSC420: Intro to Image Understanding 6/ 12
27 For each point p l =(x l, y l ), how do I get p r =(x r, y r )? By matching. Patch around (x r, y r )) should look similar to the patch around (x l, y l ). Sanja Fidler CSC420: Intro to Image Understanding 6/ 12
28 For each point p l =(x l, y l ), how do I get p r =(x r, y r )? By matching. Patch around (x r, y r )) should look similar to the patch around (x l, y l ). Sanja Fidler CSC420: Intro to Image Understanding 6/ 12
29 Version 2015: Can I do this task even better? Sanja Fidler CSC420: Intro to Image Understanding 6/ 12
30 Version 2015: Train a classifier! How can I get ground-truth? Sanja Fidler CSC420: Intro to Image Understanding 6/ 12
31 Version 2015: Train a Neural Network classifier! [J. Zbontar and Y. LeCun: Computing the Stereo Matching Cost with a Convolutional Neural Network. CVPR 15] Sanja Fidler CSC420: Intro to Image Understanding 6/ 12
")
32 Version 2015: Train a Neural Network classifier! To get the most amazing performance Figure: Performance on KITTI (metrics is error, so lower is better) Sanja Fidler CSC420: Intro to Image Understanding 6/ 12
33 For each point p l =(x l, y l ), how do I get p r =(x r, y r )? By matching. Patch around (x r, y r )) should look similar to the patch around (x l, y l ). Sanja Fidler CSC420: Intro to Image Understanding 6/ 12
34 We get a disparity map as a result Sanja Fidler CSC420: Intro to Image Understanding 7/ 12

35 We get a disparity map as a result Sanja Fidler CSC420: Intro to Image Understanding 7/ 12
36 Depth and disparity are inversely proportional Sanja Fidler CSC420: Intro to Image Understanding 7/ 12

37 Smaller patches: more detail, but noisy. Bigger: less detail, but smooth Sanja Fidler CSC420: Intro to Image Understanding 7/ 12

38 You Can Do It Much Better... With Energy Minimization on top, e.g., a Markov Random Field (MRF) K. Yamaguchi, D. McAllester, R. Urtasun, E cient Joint Segmentation, Occlusion Labeling, Stereo and Flow Estimation, ECCV2014 Paper: Code: Sanja Fidler CSC420: Intro to Image Understanding 8/ 12





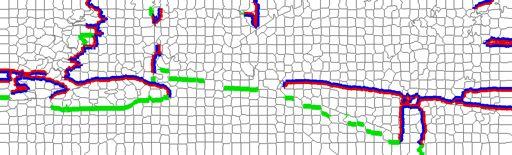





39 You Can Do It Much Better... [K. Yamaguchi, D. McAllester and R. Urtasun, ECCV 2014] Occlusion Hinge Coplanar Disparity)image Flow)image Sanja Fidler CSC420: Intro to Image Understanding 9/ 12
40 Look at State-of-the-art on KITTI Where Ours means: [K. Yamaguchi, D. McAllester and R. Urtasun, ECCV 2014] How can we evaluate the performance of a stereo algorithm? Stereo Flow wsgm [Spangenberg,,et,al,,2013] AARBM [Einecke,,et,al,,2014] PR4Sceneflow [Vogel,,et,al,,2013] PCBP [Yamaguchi,,et,al,,2012] PR4Sf+E [Vogel,,et,al,,2013] StereoSLIC [Yamaguchi,,et,al,,2013] PCBP4SS [Yamaguchi,,et,al,,2013] Ours,(Stereo) VC4SF [Vogel,,et,al,,2014] Ours,(Joint) 2.83% 4.97% 4.86% 4.36% 4.04% 4.02% 3.92% 3.40% 3.39% 3.05% BTF4ILLUM [Demetz,,et,al,,2014] TGV2ADCSIFT [Braux4Zin,,et,al,,2013] NLTGV4SC [Ran_l,,et,al,,2014] MoMonSLIC [Yamaguchi,,et,al,,2013] PR4Sceneflow [Vogel,,et,al,,2013] PCBP4Flow [Yamaguchi,,et,al,,2013] PR4Sf+E [Vogel,,et,al,,2013] Ours,(Flow) Ours,(Joint) VC4SF [Vogel,,et,al,,2014] 6.52% 6.20% 5.93% 3.91% 3.76% 3.64% 3.57% 3.38% 2.82% 2.72% Error,>,3,pixels,(Non4Occluded) Error,>,3,pixels,(Non4Occluded) Autonomous driving dataset KITTI: Sanja Fidler CSC420: Intro to Image Understanding 10 / 12

41 From Disparity We Get... Depth: Once you have disparity, you have 3D Figure: K. Yamaguchi, D. McAllester and R. Urtasun, ECCV 2014 Sanja Fidler CSC420: Intro to Image Understanding 11 / 12
 Sanja Fidler CSC420: Intro to")
42 From Disparity We Get... Money ;) Sanja Fidler CSC420: Intro to Image Understanding 11 / 12
43 Stereo Epipolar geometry Case with two cameras with parallel optical axes General case Next time Sanja Fidler CSC420: Intro to Image Understanding 12 / 12
Stereo Epipolar Geometry for General Cameras. Sanja Fidler CSC420: Intro to Image Understanding 1 / 33
 Stereo Epipolar Geometry for General Cameras Sanja Fidler CSC420: Intro to Image Understanding 1 / 33 Stereo Epipolar geometry Case with two cameras with parallel optical axes General case Now this Sanja
Stereo Epipolar Geometry for General Cameras Sanja Fidler CSC420: Intro to Image Understanding 1 / 33 Stereo Epipolar geometry Case with two cameras with parallel optical axes General case Now this Sanja
Depth from Stereo. Dominic Cheng February 7, 2018
 Depth from Stereo Dominic Cheng February 7, 2018 Agenda 1. Introduction to stereo 2. Efficient Deep Learning for Stereo Matching (W. Luo, A. Schwing, and R. Urtasun. In CVPR 2016.) 3. Cascade Residual
Depth from Stereo Dominic Cheng February 7, 2018 Agenda 1. Introduction to stereo 2. Efficient Deep Learning for Stereo Matching (W. Luo, A. Schwing, and R. Urtasun. In CVPR 2016.) 3. Cascade Residual
Lecture 14: Basic Multi-View Geometry
 Lecture 14: Basic Multi-View Geometry Stereo If I needed to find out how far point is away from me, I could use triangulation and two views scene point image plane optical center (Graphic from Khurram
Lecture 14: Basic Multi-View Geometry Stereo If I needed to find out how far point is away from me, I could use triangulation and two views scene point image plane optical center (Graphic from Khurram
Stereo. 11/02/2012 CS129, Brown James Hays. Slides by Kristen Grauman
 Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision
 Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision What Happened Last Time? Human 3D perception (3D cinema) Computational stereo Intuitive explanation of what is meant by disparity Stereo matching
Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision What Happened Last Time? Human 3D perception (3D cinema) Computational stereo Intuitive explanation of what is meant by disparity Stereo matching
Epipolar Geometry and Stereo Vision
 CS 1674: Intro to Computer Vision Epipolar Geometry and Stereo Vision Prof. Adriana Kovashka University of Pittsburgh October 5, 2016 Announcement Please send me three topics you want me to review next
CS 1674: Intro to Computer Vision Epipolar Geometry and Stereo Vision Prof. Adriana Kovashka University of Pittsburgh October 5, 2016 Announcement Please send me three topics you want me to review next
Multiple View Geometry
 Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely, Zhengqi Li Stereo Single image stereogram, by Niklas Een Mark Twain at Pool Table", no date, UCR Museum of Photography Stereo Given two images from different viewpoints
CS5670: Computer Vision Noah Snavely, Zhengqi Li Stereo Single image stereogram, by Niklas Een Mark Twain at Pool Table", no date, UCR Museum of Photography Stereo Given two images from different viewpoints
Epipolar Geometry and Stereo Vision
 Epipolar Geometry and Stereo Vision Computer Vision Shiv Ram Dubey, IIIT Sri City Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X
Epipolar Geometry and Stereo Vision Computer Vision Shiv Ram Dubey, IIIT Sri City Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X
Project 2 due today Project 3 out today. Readings Szeliski, Chapter 10 (through 10.5)
") Announcements Stereo Project 2 due today Project 3 out today Single image stereogram, by Niklas Een Readings Szeliski, Chapter 10 (through 10.5) Public Library, Stereoscopic Looking Room, Chicago, by Phillips,
Announcements Stereo Project 2 due today Project 3 out today Single image stereogram, by Niklas Een Readings Szeliski, Chapter 10 (through 10.5) Public Library, Stereoscopic Looking Room, Chicago, by Phillips,
Final Review CMSC 733 Fall 2014
 Final Review CMSC 733 Fall 2014 We have covered a lot of material in this course. One way to organize this material is around a set of key equations and algorithms. You should be familiar with all of these,
Final Review CMSC 733 Fall 2014 We have covered a lot of material in this course. One way to organize this material is around a set of key equations and algorithms. You should be familiar with all of these,
Computing the Stereo Matching Cost with CNN
 University at Austin Figure. The of lefttexas column displays the left input image, while the right column displays the output of our stereo method. Examples are sorted by difficulty, with easy examples
University at Austin Figure. The of lefttexas column displays the left input image, while the right column displays the output of our stereo method. Examples are sorted by difficulty, with easy examples
Machine vision. Summary # 11: Stereo vision and epipolar geometry. u l = λx. v l = λy
 1 Machine vision Summary # 11: Stereo vision and epipolar geometry STEREO VISION The goal of stereo vision is to use two cameras to capture 3D scenes. There are two important problems in stereo vision:
1 Machine vision Summary # 11: Stereo vision and epipolar geometry STEREO VISION The goal of stereo vision is to use two cameras to capture 3D scenes. There are two important problems in stereo vision:
Recap from Previous Lecture
 Recap from Previous Lecture Tone Mapping Preserve local contrast or detail at the expense of large scale contrast. Changing the brightness within objects or surfaces unequally leads to halos. We are now
Recap from Previous Lecture Tone Mapping Preserve local contrast or detail at the expense of large scale contrast. Changing the brightness within objects or surfaces unequally leads to halos. We are now
Binocular stereo. Given a calibrated binocular stereo pair, fuse it to produce a depth image. Where does the depth information come from?
 Binocular Stereo Binocular stereo Given a calibrated binocular stereo pair, fuse it to produce a depth image Where does the depth information come from? Binocular stereo Given a calibrated binocular stereo
Binocular Stereo Binocular stereo Given a calibrated binocular stereo pair, fuse it to produce a depth image Where does the depth information come from? Binocular stereo Given a calibrated binocular stereo
Epipolar Geometry and Stereo Vision
 Epipolar Geometry and Stereo Vision Computer Vision Jia-Bin Huang, Virginia Tech Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X x
Epipolar Geometry and Stereo Vision Computer Vision Jia-Bin Huang, Virginia Tech Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X x
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry
 55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
Efficient Deep Learning for Stereo Matching
 Efficient Deep Learning for Stereo Matching Wenjie Luo Alexander G. Schwing Raquel Urtasun Department of Computer Science, University of Toronto {wenjie, aschwing, urtasun}@cs.toronto.edu Abstract In the
Efficient Deep Learning for Stereo Matching Wenjie Luo Alexander G. Schwing Raquel Urtasun Department of Computer Science, University of Toronto {wenjie, aschwing, urtasun}@cs.toronto.edu Abstract In the
Stereo CSE 576. Ali Farhadi. Several slides from Larry Zitnick and Steve Seitz
 Stereo CSE 576 Ali Farhadi Several slides from Larry Zitnick and Steve Seitz Why do we perceive depth? What do humans use as depth cues? Motion Convergence When watching an object close to us, our eyes
Stereo CSE 576 Ali Farhadi Several slides from Larry Zitnick and Steve Seitz Why do we perceive depth? What do humans use as depth cues? Motion Convergence When watching an object close to us, our eyes
Today. Stereo (two view) reconstruction. Multiview geometry. Today. Multiview geometry. Computational Photography
 reconstruction. Multiview geometry. Today. Multiview geometry. Computational Photography") Computational Photography Matthias Zwicker University of Bern Fall 2009 Today From 2D to 3D using multiple views Introduction Geometry of two views Stereo matching Other applications Multiview geometry
Computational Photography Matthias Zwicker University of Bern Fall 2009 Today From 2D to 3D using multiple views Introduction Geometry of two views Stereo matching Other applications Multiview geometry
Lecture 6 Stereo Systems Multi-view geometry
 Lecture 6 Stereo Systems Multi-view geometry Professor Silvio Savarese Computational Vision and Geometry Lab Silvio Savarese Lecture 6-5-Feb-4 Lecture 6 Stereo Systems Multi-view geometry Stereo systems
Lecture 6 Stereo Systems Multi-view geometry Professor Silvio Savarese Computational Vision and Geometry Lab Silvio Savarese Lecture 6-5-Feb-4 Lecture 6 Stereo Systems Multi-view geometry Stereo systems
3D Sensing and Reconstruction Readings: Ch 12: , Ch 13: ,
 3D Sensing and Reconstruction Readings: Ch 12: 12.5-6, Ch 13: 13.1-3, 13.9.4 Perspective Geometry Camera Model Stereo Triangulation 3D Reconstruction by Space Carving 3D Shape from X means getting 3D coordinates
3D Sensing and Reconstruction Readings: Ch 12: 12.5-6, Ch 13: 13.1-3, 13.9.4 Perspective Geometry Camera Model Stereo Triangulation 3D Reconstruction by Space Carving 3D Shape from X means getting 3D coordinates
arxiv: v2 [cs.cv] 20 Oct 2015
![arxiv: v2 [cs.cv] 20 Oct 2015](/thumbs/75/72634031.jpg "arxiv: v2 [cs.cv] 20 Oct 2015") Computing the Stereo Matching Cost with a Convolutional Neural Network Jure Žbontar University of Ljubljana jure.zbontar@fri.uni-lj.si Yann LeCun New York University yann@cs.nyu.edu arxiv:1409.4326v2 [cs.cv]
Computing the Stereo Matching Cost with a Convolutional Neural Network Jure Žbontar University of Ljubljana jure.zbontar@fri.uni-lj.si Yann LeCun New York University yann@cs.nyu.edu arxiv:1409.4326v2 [cs.cv]
Public Library, Stereoscopic Looking Room, Chicago, by Phillips, 1923
 Public Library, Stereoscopic Looking Room, Chicago, by Phillips, 1923 Teesta suspension bridge-darjeeling, India Mark Twain at Pool Table", no date, UCR Museum of Photography Woman getting eye exam during
Public Library, Stereoscopic Looking Room, Chicago, by Phillips, 1923 Teesta suspension bridge-darjeeling, India Mark Twain at Pool Table", no date, UCR Museum of Photography Woman getting eye exam during
Depth from two cameras: stereopsis
 Depth from two cameras: stereopsis Epipolar Geometry Canonical Configuration Correspondence Matching School of Computer Science & Statistics Trinity College Dublin Dublin 2 Ireland www.scss.tcd.ie Lecture
Depth from two cameras: stereopsis Epipolar Geometry Canonical Configuration Correspondence Matching School of Computer Science & Statistics Trinity College Dublin Dublin 2 Ireland www.scss.tcd.ie Lecture
Project 3 code & artifact due Tuesday Final project proposals due noon Wed (by ) Readings Szeliski, Chapter 10 (through 10.5)
 Readings Szeliski, Chapter 10 (through 10.5)") Announcements Project 3 code & artifact due Tuesday Final project proposals due noon Wed (by email) One-page writeup (from project web page), specifying:» Your team members» Project goals. Be specific.
Announcements Project 3 code & artifact due Tuesday Final project proposals due noon Wed (by email) One-page writeup (from project web page), specifying:» Your team members» Project goals. Be specific.
Flow Estimation. Min Bai. February 8, University of Toronto. Min Bai (UofT) Flow Estimation February 8, / 47
 Flow Estimation February 8, / 47") Flow Estimation Min Bai University of Toronto February 8, 2016 Min Bai (UofT) Flow Estimation February 8, 2016 1 / 47 Outline Optical Flow - Continued Min Bai (UofT) Flow Estimation February 8, 2016 2
Flow Estimation Min Bai University of Toronto February 8, 2016 Min Bai (UofT) Flow Estimation February 8, 2016 1 / 47 Outline Optical Flow - Continued Min Bai (UofT) Flow Estimation February 8, 2016 2
Image Based Reconstruction II
 Image Based Reconstruction II Qixing Huang Feb. 2 th 2017 Slide Credit: Yasutaka Furukawa Image-Based Geometry Reconstruction Pipeline Last Lecture: Multi-View SFM Multi-View SFM This Lecture: Multi-View
Image Based Reconstruction II Qixing Huang Feb. 2 th 2017 Slide Credit: Yasutaka Furukawa Image-Based Geometry Reconstruction Pipeline Last Lecture: Multi-View SFM Multi-View SFM This Lecture: Multi-View
Depth from two cameras: stereopsis
 Depth from two cameras: stereopsis Epipolar Geometry Canonical Configuration Correspondence Matching School of Computer Science & Statistics Trinity College Dublin Dublin 2 Ireland www.scss.tcd.ie Lecture
Depth from two cameras: stereopsis Epipolar Geometry Canonical Configuration Correspondence Matching School of Computer Science & Statistics Trinity College Dublin Dublin 2 Ireland www.scss.tcd.ie Lecture
Recognition. Topics that we will try to cover:
 Recognition Topics that we will try to cover: Indexing for fast retrieval (we still owe this one) Object classification (we did this one already) Neural Networks Object class detection Hough-voting techniques
Recognition Topics that we will try to cover: Indexing for fast retrieval (we still owe this one) Object classification (we did this one already) Neural Networks Object class detection Hough-voting techniques
Computer Vision Lecture 17
 Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17
 Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Stereo. Many slides adapted from Steve Seitz
 Stereo Many slides adapted from Steve Seitz Binocular stereo Given a calibrated binocular stereo pair, fuse it to produce a depth image image 1 image 2 Dense depth map Binocular stereo Given a calibrated
Stereo Many slides adapted from Steve Seitz Binocular stereo Given a calibrated binocular stereo pair, fuse it to produce a depth image image 1 image 2 Dense depth map Binocular stereo Given a calibrated
BIL Computer Vision Apr 16, 2014
 BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
Stereo vision. Many slides adapted from Steve Seitz
 Stereo vision Many slides adapted from Steve Seitz What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape What is
Stereo vision Many slides adapted from Steve Seitz What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape What is
Lecture 10 Multi-view Stereo (3D Dense Reconstruction) Davide Scaramuzza
 Davide Scaramuzza") Lecture 10 Multi-view Stereo (3D Dense Reconstruction) Davide Scaramuzza REMODE: Probabilistic, Monocular Dense Reconstruction in Real Time, ICRA 14, by Pizzoli, Forster, Scaramuzza [M. Pizzoli, C. Forster,
Lecture 10 Multi-view Stereo (3D Dense Reconstruction) Davide Scaramuzza REMODE: Probabilistic, Monocular Dense Reconstruction in Real Time, ICRA 14, by Pizzoli, Forster, Scaramuzza [M. Pizzoli, C. Forster,
Stereo Matching.
 Stereo Matching Stereo Vision [1] Reduction of Searching by Epipolar Constraint [1] Photometric Constraint [1] Same world point has same intensity in both images. True for Lambertian surfaces A Lambertian
Stereo Matching Stereo Vision [1] Reduction of Searching by Epipolar Constraint [1] Photometric Constraint [1] Same world point has same intensity in both images. True for Lambertian surfaces A Lambertian
Final Exam Study Guide
 Final Exam Study Guide Exam Window: 28th April, 12:00am EST to 30th April, 11:59pm EST Description As indicated in class the goal of the exam is to encourage you to review the material from the course.
Final Exam Study Guide Exam Window: 28th April, 12:00am EST to 30th April, 11:59pm EST Description As indicated in class the goal of the exam is to encourage you to review the material from the course.
1 (5 max) 2 (10 max) 3 (20 max) 4 (30 max) 5 (10 max) 6 (15 extra max) total (75 max + 15 extra)
 2 (10 max) 3 (20 max) 4 (30 max) 5 (10 max) 6 (15 extra max) total (75 max + 15 extra)") Mierm Exam CS223b Stanford CS223b Computer Vision, Winter 2004 Feb. 18, 2004 Full Name: Email: This exam has 7 pages. Make sure your exam is not missing any sheets, and write your name on every page. The
Mierm Exam CS223b Stanford CS223b Computer Vision, Winter 2004 Feb. 18, 2004 Full Name: Email: This exam has 7 pages. Make sure your exam is not missing any sheets, and write your name on every page. The
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
CS4495/6495 Introduction to Computer Vision. 3B-L3 Stereo correspondence
 CS4495/6495 Introduction to Computer Vision 3B-L3 Stereo correspondence For now assume parallel image planes Assume parallel (co-planar) image planes Assume same focal lengths Assume epipolar lines are
CS4495/6495 Introduction to Computer Vision 3B-L3 Stereo correspondence For now assume parallel image planes Assume parallel (co-planar) image planes Assume same focal lengths Assume epipolar lines are
S7348: Deep Learning in Ford's Autonomous Vehicles. Bryan Goodman Argo AI 9 May 2017
 S7348: Deep Learning in Ford's Autonomous Vehicles Bryan Goodman Argo AI 9 May 2017 1 Ford s 12 Year History in Autonomous Driving Today: examples from Stereo image processing Object detection Using RNN
S7348: Deep Learning in Ford's Autonomous Vehicles Bryan Goodman Argo AI 9 May 2017 1 Ford s 12 Year History in Autonomous Driving Today: examples from Stereo image processing Object detection Using RNN
Recap: Features and filters. Recap: Grouping & fitting. Now: Multiple views 10/29/2008. Epipolar geometry & stereo vision. Why multiple views?
 Recap: Features and filters Epipolar geometry & stereo vision Tuesday, Oct 21 Kristen Grauman UT-Austin Transforming and describing images; textures, colors, edges Recap: Grouping & fitting Now: Multiple
Recap: Features and filters Epipolar geometry & stereo vision Tuesday, Oct 21 Kristen Grauman UT-Austin Transforming and describing images; textures, colors, edges Recap: Grouping & fitting Now: Multiple
Stereo II CSE 576. Ali Farhadi. Several slides from Larry Zitnick and Steve Seitz
 Stereo II CSE 576 Ali Farhadi Several slides from Larry Zitnick and Steve Seitz Camera parameters A camera is described by several parameters Translation T of the optical center from the origin of world
Stereo II CSE 576 Ali Farhadi Several slides from Larry Zitnick and Steve Seitz Camera parameters A camera is described by several parameters Translation T of the optical center from the origin of world
Project 4 Results. Representation. Data. Learning. Zachary, Hung-I, Paul, Emanuel. SIFT and HoG are popular and successful.
 Project 4 Results Representation SIFT and HoG are popular and successful. Data Hugely varying results from hard mining. Learning Non-linear classifier usually better. Zachary, Hung-I, Paul, Emanuel Project
Project 4 Results Representation SIFT and HoG are popular and successful. Data Hugely varying results from hard mining. Learning Non-linear classifier usually better. Zachary, Hung-I, Paul, Emanuel Project
Object Detection. Sanja Fidler CSC420: Intro to Image Understanding 1/ 1
 Object Detection Sanja Fidler CSC420: Intro to Image Understanding 1/ 1 Object Detection The goal of object detection is to localize objects in an image and tell their class Localization: place a tight
Object Detection Sanja Fidler CSC420: Intro to Image Understanding 1/ 1 Object Detection The goal of object detection is to localize objects in an image and tell their class Localization: place a tight
Stereo: Disparity and Matching
 CS 4495 Computer Vision Aaron Bobick School of Interactive Computing Administrivia PS2 is out. But I was late. So we pushed the due date to Wed Sept 24 th, 11:55pm. There is still *no* grace period. To
CS 4495 Computer Vision Aaron Bobick School of Interactive Computing Administrivia PS2 is out. But I was late. So we pushed the due date to Wed Sept 24 th, 11:55pm. There is still *no* grace period. To
Lecture 14: Computer Vision
 CS/b: Artificial Intelligence II Prof. Olga Veksler Lecture : Computer Vision D shape from Images Stereo Reconstruction Many Slides are from Steve Seitz (UW), S. Narasimhan Outline Cues for D shape perception
CS/b: Artificial Intelligence II Prof. Olga Veksler Lecture : Computer Vision D shape from Images Stereo Reconstruction Many Slides are from Steve Seitz (UW), S. Narasimhan Outline Cues for D shape perception
Lecture 9 & 10: Stereo Vision
 Lecture 9 & 10: Stereo Vision Professor Fei- Fei Li Stanford Vision Lab 1 What we will learn today? IntroducEon to stereo vision Epipolar geometry: a gentle intro Parallel images Image receficaeon Solving
Lecture 9 & 10: Stereo Vision Professor Fei- Fei Li Stanford Vision Lab 1 What we will learn today? IntroducEon to stereo vision Epipolar geometry: a gentle intro Parallel images Image receficaeon Solving
CS 2770: Intro to Computer Vision. Multiple Views. Prof. Adriana Kovashka University of Pittsburgh March 14, 2017
 CS 277: Intro to Computer Vision Multiple Views Prof. Adriana Kovashka Universit of Pittsburgh March 4, 27 Plan for toda Affine and projective image transformations Homographies and image mosaics Stereo
CS 277: Intro to Computer Vision Multiple Views Prof. Adriana Kovashka Universit of Pittsburgh March 4, 27 Plan for toda Affine and projective image transformations Homographies and image mosaics Stereo
Cameras and Stereo CSE 455. Linda Shapiro
 Cameras and Stereo CSE 455 Linda Shapiro 1 Müller-Lyer Illusion http://www.michaelbach.de/ot/sze_muelue/index.html What do you know about perspective projection? Vertical lines? Other lines? 2 Image formation
Cameras and Stereo CSE 455 Linda Shapiro 1 Müller-Lyer Illusion http://www.michaelbach.de/ot/sze_muelue/index.html What do you know about perspective projection? Vertical lines? Other lines? 2 Image formation
There are many cues in monocular vision which suggests that vision in stereo starts very early from two similar 2D images. Lets see a few...
 STEREO VISION The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their own
STEREO VISION The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their own
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
Stereo Vision. MAN-522 Computer Vision
 Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction
 Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction Marc Pollefeys Joined work with Nikolay Savinov, Christian Haene, Lubor Ladicky 2 Comparison to Volumetric Fusion Higher-order ray
Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction Marc Pollefeys Joined work with Nikolay Savinov, Christian Haene, Lubor Ladicky 2 Comparison to Volumetric Fusion Higher-order ray
LUMS Mine Detector Project
 LUMS Mine Detector Project Using visual information to control a robot (Hutchinson et al. 1996). Vision may or may not be used in the feedback loop. Visual (image based) features such as points, lines
LUMS Mine Detector Project Using visual information to control a robot (Hutchinson et al. 1996). Vision may or may not be used in the feedback loop. Visual (image based) features such as points, lines
Colorado School of Mines. Computer Vision. Professor William Hoff Dept of Electrical Engineering &Computer Science.
 Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Stereo Vision 2 Inferring 3D from 2D Model based pose estimation single (calibrated) camera > Can
Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Stereo Vision 2 Inferring 3D from 2D Model based pose estimation single (calibrated) camera > Can
Rectification. Dr. Gerhard Roth
 Rectification Dr. Gerhard Roth Problem Definition Given a pair of stereo images, the intrinsic parameters of each camera, and the extrinsic parameters of the system, R, and, compute the image transformation
Rectification Dr. Gerhard Roth Problem Definition Given a pair of stereo images, the intrinsic parameters of each camera, and the extrinsic parameters of the system, R, and, compute the image transformation
7. The Geometry of Multi Views. Computer Engineering, i Sejong University. Dongil Han
 Computer Vision 7. The Geometry of Multi Views Computer Engineering, i Sejong University i Dongil Han THE GEOMETRY OF MULTIPLE VIEWS Epipolar Geometry The Stereopsis Problem: Fusion and Reconstruction
Computer Vision 7. The Geometry of Multi Views Computer Engineering, i Sejong University i Dongil Han THE GEOMETRY OF MULTIPLE VIEWS Epipolar Geometry The Stereopsis Problem: Fusion and Reconstruction
A MULTI-RESOLUTION APPROACH TO DEPTH FIELD ESTIMATION IN DENSE IMAGE ARRAYS F. Battisti, M. Brizzi, M. Carli, A. Neri
 A MULTI-RESOLUTION APPROACH TO DEPTH FIELD ESTIMATION IN DENSE IMAGE ARRAYS F. Battisti, M. Brizzi, M. Carli, A. Neri Università degli Studi Roma TRE, Roma, Italy 2 nd Workshop on Light Fields for Computer
A MULTI-RESOLUTION APPROACH TO DEPTH FIELD ESTIMATION IN DENSE IMAGE ARRAYS F. Battisti, M. Brizzi, M. Carli, A. Neri Università degli Studi Roma TRE, Roma, Italy 2 nd Workshop on Light Fields for Computer
Stereo matching. Francesco Isgrò. 3D Reconstruction and Stereo p.1/21
 Stereo matching Francesco Isgrò 3D Reconstruction and Stereo p.1/21 Structure of a stereo vision system Extract interesting point from each image Determine a set of matching points Compute the fundamental
Stereo matching Francesco Isgrò 3D Reconstruction and Stereo p.1/21 Structure of a stereo vision system Extract interesting point from each image Determine a set of matching points Compute the fundamental
Stereo. Outline. Multiple views 3/29/2017. Thurs Mar 30 Kristen Grauman UT Austin. Multi-view geometry, matching, invariant features, stereo vision
 Stereo Thurs Mar 30 Kristen Grauman UT Austin Outline Last time: Human stereopsis Epipolar geometry and the epipolar constraint Case example with parallel optical axes General case with calibrated cameras
Stereo Thurs Mar 30 Kristen Grauman UT Austin Outline Last time: Human stereopsis Epipolar geometry and the epipolar constraint Case example with parallel optical axes General case with calibrated cameras
EECS 442 Computer vision. Stereo systems. Stereo vision Rectification Correspondence problem Active stereo vision systems
 EECS 442 Computer vision Stereo systems Stereo vision Rectification Correspondence problem Active stereo vision systems Reading: [HZ] Chapter: 11 [FP] Chapter: 11 Stereo vision P p p O 1 O 2 Goal: estimate
EECS 442 Computer vision Stereo systems Stereo vision Rectification Correspondence problem Active stereo vision systems Reading: [HZ] Chapter: 11 [FP] Chapter: 11 Stereo vision P p p O 1 O 2 Goal: estimate
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Geometry of Multiple views
 1 Geometry of Multiple views CS 554 Computer Vision Pinar Duygulu Bilkent University 2 Multiple views Despite the wealth of information contained in a a photograph, the depth of a scene point along the
1 Geometry of Multiple views CS 554 Computer Vision Pinar Duygulu Bilkent University 2 Multiple views Despite the wealth of information contained in a a photograph, the depth of a scene point along the
MAPI Computer Vision. Multiple View Geometry
 MAPI Computer Vision Multiple View Geometry Geometry o Multiple Views 2- and 3- view geometry p p Kpˆ [ K R t]p Geometry o Multiple Views 2- and 3- view geometry Epipolar Geometry The epipolar geometry
MAPI Computer Vision Multiple View Geometry Geometry o Multiple Views 2- and 3- view geometry p p Kpˆ [ K R t]p Geometry o Multiple Views 2- and 3- view geometry Epipolar Geometry The epipolar geometry
Epipolar geometry. x x
 Two-view geometry Epipolar geometry X x x Baseline line connecting the two camera centers Epipolar Plane plane containing baseline (1D family) Epipoles = intersections of baseline with image planes = projections
Two-view geometry Epipolar geometry X x x Baseline line connecting the two camera centers Epipolar Plane plane containing baseline (1D family) Epipoles = intersections of baseline with image planes = projections
EXAM SOLUTIONS. Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006,
 School of Computer Science and Communication, KTH Danica Kragic EXAM SOLUTIONS Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006, 14.00 19.00 Grade table 0-25 U 26-35 3 36-45
School of Computer Science and Communication, KTH Danica Kragic EXAM SOLUTIONS Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006, 14.00 19.00 Grade table 0-25 U 26-35 3 36-45
Lecture 6 Stereo Systems Multi- view geometry Professor Silvio Savarese Computational Vision and Geometry Lab Silvio Savarese Lecture 6-24-Jan-15
 Lecture 6 Stereo Systems Multi- view geometry Professor Silvio Savarese Computational Vision and Geometry Lab Silvio Savarese Lecture 6-24-Jan-15 Lecture 6 Stereo Systems Multi- view geometry Stereo systems
Lecture 6 Stereo Systems Multi- view geometry Professor Silvio Savarese Computational Vision and Geometry Lab Silvio Savarese Lecture 6-24-Jan-15 Lecture 6 Stereo Systems Multi- view geometry Stereo systems
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry
 55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
Lecture'9'&'10:'' Stereo'Vision'
 Lecture'9'&'10:'' Stereo'Vision' Dr.'Juan'Carlos'Niebles' Stanford'AI'Lab' ' Professor'FeiAFei'Li' Stanford'Vision'Lab' 1' Dimensionality'ReducIon'Machine'(3D'to'2D)' 3D world 2D image Point of observation
Lecture'9'&'10:'' Stereo'Vision' Dr.'Juan'Carlos'Niebles' Stanford'AI'Lab' ' Professor'FeiAFei'Li' Stanford'Vision'Lab' 1' Dimensionality'ReducIon'Machine'(3D'to'2D)' 3D world 2D image Point of observation
Complex Sensors: Cameras, Visual Sensing. The Robotics Primer (Ch. 9) ECE 497: Introduction to Mobile Robotics -Visual Sensors
 ECE 497: Introduction to Mobile Robotics -Visual Sensors") Complex Sensors: Cameras, Visual Sensing The Robotics Primer (Ch. 9) Bring your laptop and robot everyday DO NOT unplug the network cables from the desktop computers or the walls Tuesday s Quiz is on Visual
Complex Sensors: Cameras, Visual Sensing The Robotics Primer (Ch. 9) Bring your laptop and robot everyday DO NOT unplug the network cables from the desktop computers or the walls Tuesday s Quiz is on Visual
Two-view geometry Computer Vision Spring 2018, Lecture 10
 Two-view geometry http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 10 Course announcements Homework 2 is due on February 23 rd. - Any questions about the homework? - How many of
Two-view geometry http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 10 Course announcements Homework 2 is due on February 23 rd. - Any questions about the homework? - How many of
Multiple View Geometry
 Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Epipolar Geometry Prof. D. Stricker. With slides from A. Zisserman, S. Lazebnik, Seitz
 Epipolar Geometry Prof. D. Stricker With slides from A. Zisserman, S. Lazebnik, Seitz 1 Outline 1. Short introduction: points and lines 2. Two views geometry: Epipolar geometry Relation point/line in two
Epipolar Geometry Prof. D. Stricker With slides from A. Zisserman, S. Lazebnik, Seitz 1 Outline 1. Short introduction: points and lines 2. Two views geometry: Epipolar geometry Relation point/line in two
What have we leaned so far?
 What have we leaned so far? Camera structure Eye structure Project 1: High Dynamic Range Imaging What have we learned so far? Image Filtering Image Warping Camera Projection Model Project 2: Panoramic
What have we leaned so far? Camera structure Eye structure Project 1: High Dynamic Range Imaging What have we learned so far? Image Filtering Image Warping Camera Projection Model Project 2: Panoramic
Lecture 19: Depth Cameras. Visual Computing Systems CMU , Fall 2013
 Lecture 19: Depth Cameras Visual Computing Systems Continuing theme: computational photography Cameras capture light, then extensive processing produces the desired image Today: - Capturing scene depth
Lecture 19: Depth Cameras Visual Computing Systems Continuing theme: computational photography Cameras capture light, then extensive processing produces the desired image Today: - Capturing scene depth
Supplementary Material for Zoom and Learn: Generalizing Deep Stereo Matching to Novel Domains
 Supplementary Material for Zoom and Learn: Generalizing Deep Stereo Matching to Novel Domains Jiahao Pang 1 Wenxiu Sun 1 Chengxi Yang 1 Jimmy Ren 1 Ruichao Xiao 1 Jin Zeng 1 Liang Lin 1,2 1 SenseTime Research
Supplementary Material for Zoom and Learn: Generalizing Deep Stereo Matching to Novel Domains Jiahao Pang 1 Wenxiu Sun 1 Chengxi Yang 1 Jimmy Ren 1 Ruichao Xiao 1 Jin Zeng 1 Liang Lin 1,2 1 SenseTime Research
Lecture 10 Dense 3D Reconstruction
 Institute of Informatics Institute of Neuroinformatics Lecture 10 Dense 3D Reconstruction Davide Scaramuzza 1 REMODE: Probabilistic, Monocular Dense Reconstruction in Real Time M. Pizzoli, C. Forster,
Institute of Informatics Institute of Neuroinformatics Lecture 10 Dense 3D Reconstruction Davide Scaramuzza 1 REMODE: Probabilistic, Monocular Dense Reconstruction in Real Time M. Pizzoli, C. Forster,
Computer Vision I. Dense Stereo Correspondences. Anita Sellent 1/15/16
 Computer Vision I Dense Stereo Correspondences Anita Sellent Stereo Two Cameras Overlapping field of view Known transformation between cameras From disparity compute depth [ Bradski, Kaehler: Learning
Computer Vision I Dense Stereo Correspondences Anita Sellent Stereo Two Cameras Overlapping field of view Known transformation between cameras From disparity compute depth [ Bradski, Kaehler: Learning
Depth Measurement and 3-D Reconstruction of Multilayered Surfaces by Binocular Stereo Vision with Parallel Axis Symmetry Using Fuzzy
 Depth Measurement and 3-D Reconstruction of Multilayered Surfaces by Binocular Stereo Vision with Parallel Axis Symmetry Using Fuzzy Sharjeel Anwar, Dr. Shoaib, Taosif Iqbal, Mohammad Saqib Mansoor, Zubair
Depth Measurement and 3-D Reconstruction of Multilayered Surfaces by Binocular Stereo Vision with Parallel Axis Symmetry Using Fuzzy Sharjeel Anwar, Dr. Shoaib, Taosif Iqbal, Mohammad Saqib Mansoor, Zubair
JOINT DETECTION AND SEGMENTATION WITH DEEP HIERARCHICAL NETWORKS. Zhao Chen Machine Learning Intern, NVIDIA
 JOINT DETECTION AND SEGMENTATION WITH DEEP HIERARCHICAL NETWORKS Zhao Chen Machine Learning Intern, NVIDIA ABOUT ME 5th year PhD student in physics @ Stanford by day, deep learning computer vision scientist
JOINT DETECTION AND SEGMENTATION WITH DEEP HIERARCHICAL NETWORKS Zhao Chen Machine Learning Intern, NVIDIA ABOUT ME 5th year PhD student in physics @ Stanford by day, deep learning computer vision scientist
Epipolar Geometry and Stereo Vision
 CS 1699: Intro to Computer Vision Epipolar Geometry and Stereo Vision Prof. Adriana Kovashka University of Pittsburgh October 8, 2015 Today Review Projective transforms Image stitching (homography) Epipolar
CS 1699: Intro to Computer Vision Epipolar Geometry and Stereo Vision Prof. Adriana Kovashka University of Pittsburgh October 8, 2015 Today Review Projective transforms Image stitching (homography) Epipolar
Lecture 10: Multi view geometry
 Lecture 10: Multi view geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Lecture 10: Multi view geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Stereo Correspondence with Occlusions using Graph Cuts
 Stereo Correspondence with Occlusions using Graph Cuts EE368 Final Project Matt Stevens mslf@stanford.edu Zuozhen Liu zliu2@stanford.edu I. INTRODUCTION AND MOTIVATION Given two stereo images of a scene,
Stereo Correspondence with Occlusions using Graph Cuts EE368 Final Project Matt Stevens mslf@stanford.edu Zuozhen Liu zliu2@stanford.edu I. INTRODUCTION AND MOTIVATION Given two stereo images of a scene,
Multi-view stereo. Many slides adapted from S. Seitz
 Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
Subpixel accurate refinement of disparity maps using stereo correspondences
 Subpixel accurate refinement of disparity maps using stereo correspondences Matthias Demant Lehrstuhl für Mustererkennung, Universität Freiburg Outline 1 Introduction and Overview 2 Refining the Cost Volume
Subpixel accurate refinement of disparity maps using stereo correspondences Matthias Demant Lehrstuhl für Mustererkennung, Universität Freiburg Outline 1 Introduction and Overview 2 Refining the Cost Volume
Camera Calibration. Schedule. Jesus J Caban. Note: You have until next Monday to let me know. ! Today:! Camera calibration
 Camera Calibration Jesus J Caban Schedule! Today:! Camera calibration! Wednesday:! Lecture: Motion & Optical Flow! Monday:! Lecture: Medical Imaging! Final presentations:! Nov 29 th : W. Griffin! Dec 1
Camera Calibration Jesus J Caban Schedule! Today:! Camera calibration! Wednesday:! Lecture: Motion & Optical Flow! Monday:! Lecture: Medical Imaging! Final presentations:! Nov 29 th : W. Griffin! Dec 1
Miniature faking. In close-up photo, the depth of field is limited.
 Miniature faking In close-up photo, the depth of field is limited. http://en.wikipedia.org/wiki/file:jodhpur_tilt_shift.jpg Miniature faking Miniature faking http://en.wikipedia.org/wiki/file:oregon_state_beavers_tilt-shift_miniature_greg_keene.jpg
Miniature faking In close-up photo, the depth of field is limited. http://en.wikipedia.org/wiki/file:jodhpur_tilt_shift.jpg Miniature faking Miniature faking http://en.wikipedia.org/wiki/file:oregon_state_beavers_tilt-shift_miniature_greg_keene.jpg
Stereo imaging ideal geometry
 Stereo imaging ideal geometry (X,Y,Z) Z f (x L,y L ) f (x R,y R ) Optical axes are parallel Optical axes separated by baseline, b. Line connecting lens centers is perpendicular to the optical axis, and
Stereo imaging ideal geometry (X,Y,Z) Z f (x L,y L ) f (x R,y R ) Optical axes are parallel Optical axes separated by baseline, b. Line connecting lens centers is perpendicular to the optical axis, and
Rigid Body Motion and Image Formation. Jana Kosecka, CS 482
 Rigid Body Motion and Image Formation Jana Kosecka, CS 482 A free vector is defined by a pair of points : Coordinates of the vector : 1 3D Rotation of Points Euler angles Rotation Matrices in 3D 3 by 3
Rigid Body Motion and Image Formation Jana Kosecka, CS 482 A free vector is defined by a pair of points : Coordinates of the vector : 1 3D Rotation of Points Euler angles Rotation Matrices in 3D 3 by 3
Laser sensors. Transmitter. Receiver. Basilio Bona ROBOTICA 03CFIOR
 Mobile & Service Robotics Sensors for Robotics 3 Laser sensors Rays are transmitted and received coaxially The target is illuminated by collimated rays The receiver measures the time of flight (back and
Mobile & Service Robotics Sensors for Robotics 3 Laser sensors Rays are transmitted and received coaxially The target is illuminated by collimated rays The receiver measures the time of flight (back and
Learning the Matching Function
 Learning the Matching Function L ubor Ladický ETH Zürich, Switzerland lubor.ladicky@inf.ethz.ch Christian Häne ETH Zürich, Switzerland chaene@inf.ethz.ch Marc Pollefeys ETH Zürich, Switzerland marc.pollefeys@inf.ethz.ch
Learning the Matching Function L ubor Ladický ETH Zürich, Switzerland lubor.ladicky@inf.ethz.ch Christian Häne ETH Zürich, Switzerland chaene@inf.ethz.ch Marc Pollefeys ETH Zürich, Switzerland marc.pollefeys@inf.ethz.ch
Depth. Common Classification Tasks. Example: AlexNet. Another Example: Inception. Another Example: Inception. Depth
 Common Classification Tasks Recognition of individual objects/faces Analyze object-specific features (e.g., key points) Train with images from different viewing angles Recognition of object classes Analyze
Common Classification Tasks Recognition of individual objects/faces Analyze object-specific features (e.g., key points) Train with images from different viewing angles Recognition of object classes Analyze
Stereo Vision A simple system. Dr. Gerhard Roth Winter 2012
 Stereo Vision A simple system Dr. Gerhard Roth Winter 2012 Stereo Stereo Ability to infer information on the 3-D structure and distance of a scene from two or more images taken from different viewpoints
Stereo Vision A simple system Dr. Gerhard Roth Winter 2012 Stereo Stereo Ability to infer information on the 3-D structure and distance of a scene from two or more images taken from different viewpoints
Object Detection by 3D Aspectlets and Occlusion Reasoning
 Object Detection by 3D Aspectlets and Occlusion Reasoning Yu Xiang University of Michigan Silvio Savarese Stanford University In the 4th International IEEE Workshop on 3D Representation and Recognition
Object Detection by 3D Aspectlets and Occlusion Reasoning Yu Xiang University of Michigan Silvio Savarese Stanford University In the 4th International IEEE Workshop on 3D Representation and Recognition
CS201 Computer Vision Camera Geometry
 CS201 Computer Vision Camera Geometry John Magee 25 November, 2014 Slides Courtesy of: Diane H. Theriault (deht@bu.edu) Question of the Day: How can we represent the relationships between cameras and the
CS201 Computer Vision Camera Geometry John Magee 25 November, 2014 Slides Courtesy of: Diane H. Theriault (deht@bu.edu) Question of the Day: How can we represent the relationships between cameras and the
Kinect Device. How the Kinect Works. Kinect Device. What the Kinect does 4/27/16. Subhransu Maji Slides credit: Derek Hoiem, University of Illinois
 4/27/16 Kinect Device How the Kinect Works T2 Subhransu Maji Slides credit: Derek Hoiem, University of Illinois Photo frame-grabbed from: http://www.blisteredthumbs.net/2010/11/dance-central-angry-review
4/27/16 Kinect Device How the Kinect Works T2 Subhransu Maji Slides credit: Derek Hoiem, University of Illinois Photo frame-grabbed from: http://www.blisteredthumbs.net/2010/11/dance-central-angry-review
Combining Stereo Disparity and Optical Flow for Basic Scene Flow
 Combining Stereo Disparity and Optical Flow for Basic Scene Flow René Schuster, Christian Bailer, Oliver Wasenmüller, Didier Stricker DFKI German Research Center for Artificial Intelligence firstname.lastname@dfki.de
Combining Stereo Disparity and Optical Flow for Basic Scene Flow René Schuster, Christian Bailer, Oliver Wasenmüller, Didier Stricker DFKI German Research Center for Artificial Intelligence firstname.lastname@dfki.de
Final project bits and pieces
 Final project bits and pieces The project is expected to take four weeks of time for up to four people. At 12 hours per week per person that comes out to: ~192 hours of work for a four person team. Capstone:
Final project bits and pieces The project is expected to take four weeks of time for up to four people. At 12 hours per week per person that comes out to: ~192 hours of work for a four person team. Capstone: