Object Detection. Sanja Fidler CSC420: Intro to Image Understanding 1/ 1
|
|
|
- Cornelia Mills
- 6 years ago
- Views:
Transcription
1 Object Detection Sanja Fidler CSC420: Intro to Image Understanding 1/ 1

2 Object Detection The goal of object detection is to localize objects in an image and tell their class Localization: place a tight bounding box around object Most approaches find only objects of one or a few specific classes, e.g. car or cow Sanja Fidler CSC420: Intro to Image Understanding 2/ 1
3 Type of Approaches Di erent approaches tackle detection di erently. They can roughly be categorized into three main types: Find interest points, followed by Hough voting Sanja Fidler CSC420: Intro to Image Understanding 3/ 1
4 Interest Point Based Approaches Compute interest points (e.g., Harris corner detector is a popular choice) Vote for where the object could be given the content around interest points Sanja Fidler CSC420: Intro to Image Understanding 4/ 1
5 Interest Point Based Approaches Compute interest points (e.g., Harris corner detector is a popular choice) Vote for where the object could be given the content around interest points Sanja Fidler CSC420: Intro to Image Understanding 4/ 1
6 Interest Point Based Approaches Compute interest points (e.g., Harris corner detector is a popular choice) Vote for where the object could be given the content around interest points Sanja Fidler CSC420: Intro to Image Understanding 4/ 1
7 Interest Point Based Approaches Compute interest points (e.g., Harris corner detector is a popular choice) Vote for where the object could be given the content around interest points Sanja Fidler CSC420: Intro to Image Understanding 4/ 1
8 Interest Point Based Approaches Compute interest points (e.g., Harris corner detector is a popular choice) Vote for where the object could be given the content around interest points Sanja Fidler CSC420: Intro to Image Understanding 4/ 1
9 Type of Approaches Di erent approaches tackle detection di erently. They can roughly be categorized into three main types: Find interest points, followed by Hough voting Sliding windows: slide a box around image and classify each image crop inside a box (contains object or not?) Sanja Fidler CSC420: Intro to Image Understanding 5/ 1
10 Sliding Window Approaches Slide window and ask a classifier: Is sheep in window or not? 0.1 confidence [Slide: R. Urtasun] Sanja Fidler CSC420: Intro to Image Understanding 6/ 1
11 Sliding Window Approaches Slide window and ask a classifier: Is sheep in window or not? -0.2 [Slide: R. Urtasun] Sanja Fidler CSC420: Intro to Image Understanding 6/ 1
12 Sliding Window Approaches Slide window and ask a classifier: Is sheep in window or not? -0.1 [Slide: R. Urtasun] Sanja Fidler CSC420: Intro to Image Understanding 6/ 1
13 Sliding Window Approaches Slide window and ask a classifier: Is sheep in window or not? 0.1 [Slide: R. Urtasun] Sanja Fidler CSC420: Intro to Image Understanding 6/ 1
14 Sliding Window Approaches Slide window and ask a classifier: Is sheep in window or not? [Slide: R. Urtasun] Sanja Fidler CSC420: Intro to Image Understanding 6/ 1
15 Sliding Window Approaches Slide window and ask a classifier: Is sheep in window or not? 0.5 [Slide: R. Urtasun] Sanja Fidler CSC420: Intro to Image Understanding 6/ 1
16 Sliding Window Approaches Slide window and ask a classifier: Is sheep in window or not? 0.4 [Slide: R. Urtasun] Sanja Fidler CSC420: Intro to Image Understanding 6/ 1

17 Sliding Window Approaches Slide window and ask a classifier: Is sheep in window or not? 0.3 [Slide: R. Urtasun] Sanja Fidler CSC420: Intro to Image Understanding 6/ 1
18 Sliding Window Approaches Slide window and ask a classifier: Is sheep in window or not? 0.1 confidence [Slide: R. Urtasun] Sanja Fidler CSC420: Intro to Image Understanding 6/ 1
19 Type of Approaches Di erent approaches tackle detection di erently. They can roughly be categorized into three main types: Find interest points, followed by Hough voting Sliding windows: slide a box around image and classify each image crop inside a box (contains object or not?) Generate region (object) proposals, and classify each region Sanja Fidler CSC420: Intro to Image Understanding 7/ 1
20 Region Proposal Based Approaches Group pixels into object-like regions Sanja Fidler CSC420: Intro to Image Understanding 8/ 1

21 Region Proposal Based Approaches Group pixels into object-like regions Sanja Fidler CSC420: Intro to Image Understanding 8/ 1

22 Region Proposal Based Approaches Group pixels into object-like regions Sanja Fidler CSC420: Intro to Image Understanding 8/ 1
23 Region Proposal Based Approaches Generate many di erent regions Sanja Fidler CSC420: Intro to Image Understanding 8/ 1
24 Region Proposal Based Approaches Generate many di erent regions Sanja Fidler CSC420: Intro to Image Understanding 8/ 1

25 Region Proposal Based Approaches Generate many di erent regions Sanja Fidler CSC420: Intro to Image Understanding 8/ 1
26 Region Proposal Based Approaches The hope is that at least a few will cover real objects Sanja Fidler CSC420: Intro to Image Understanding 8/ 1

27 Region Proposal Based Approaches The hope is that at least a few will cover real objects Sanja Fidler CSC420: Intro to Image Understanding 8/ 1
28 Region Proposal Based Approaches Select a region Sanja Fidler CSC420: Intro to Image Understanding 8/ 1

29 Region Proposal Based Approaches Crop out an image patch around it, throw to classifier (e.g., Neural Net) Sanja Fidler CSC420: Intro to Image Understanding 8/ 1
30 Region Proposal Based Approaches Do this for every region Sanja Fidler CSC420: Intro to Image Understanding 8/ 1

31 Region Proposal Based Approaches Do this for every region Sanja Fidler CSC420: Intro to Image Understanding 8/ 1
32 Region Proposal Based Approaches Do this for every region Sanja Fidler CSC420: Intro to Image Understanding 8/ 1
33 Type of Approaches Di erent approaches tackle detection di erently. They can roughly be categorized into three main types: Find interest points, followed by Hough voting Let s first look at one example method for this Sliding windows: slide a box around image and classify each image crop inside a box (contains object or not?) Generate region (object) proposals, and classify each region Sanja Fidler CSC420: Intro to Image Understanding 9/ 1
34 Object Detection via Hough Voting: Implicit Shape Model B. Leibe, A. Leonardis, B. Schiele Robust Object Detection with Interleaved Categorization and Segmentation IJCV, 2008 Paper: Sanja Fidler CSC420: Intro to Image Understanding 10 / 1


35 [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 11 / 1 Start with Simple: Line Detection How can I find lines in this image?
36 Hough Transform Idea: Voting (Hough Transform) Voting is a general technique where we let the features vote for all models that are compatible with it. Cycle through features, cast votes for model parameters. Look for model parameters that receive a lot of votes. [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 12 / 1
37 Hough Transform: Line Detection Hough space: parameter space Connection between image (x, y) and Hough (m, b) spaces [Source: S. Seitz] A line in the image corresponds to a point in Hough space What does a point (x 0, y 0 ) in the image space map to in Hough space? Sanja Fidler CSC420: Intro to Image Understanding 13 / 1
38 Hough Transform: Line Detection Hough space: parameter space Connection between image (x, y) and Hough (m, b) spaces A line in the image corresponds to a point in Hough space A point in image space votes for all the lines that go through this point. This votes are a line in the Hough space. [Source: S. Seitz] Sanja Fidler CSC420: Intro to Image Understanding 14 / 1
39 Hough Transform: Line Detection Hough space: parameter space Two points: Each point corresponds to a line in the Hough space A point where these two lines meet defines a line in the image! [Source: S. Seitz] Sanja Fidler CSC420: Intro to Image Understanding 15 / 1
40 Hough Transform: Line Detection Hough space: parameter space Vote with each image point Find peaks in Hough space. Each peak is a line in the image. [Source: S. Seitz] Sanja Fidler CSC420: Intro to Image Understanding 16 / 1
41 Hough Transform: Line Detection Issues with usual (m, b) parameterspace:undefinedforverticallines A better representation is a polar representation of lines [Source: S. Seitz] Sanja Fidler CSC420: Intro to Image Understanding 17 / 1

42 Example Hough Transform With the parameterization x cos + y sin = d Points in picture represent sinusoids in parameter space Points in parameter space represent lines in picture Example 0.6x +0.4y =2.4, Sinusoids intersect at d =2.4, = [Source: M. Kazhdan, slide credit: R. Urtasun] Sanja Fidler CSC420: Intro to Image Understanding 18 / 1
43 Hough Transform: Line Detection Hough Voting algorithm [Source: S. Seitz] Sanja Fidler CSC420: Intro to Image Understanding 19 / 1

44 Hough Transform: Circle Detection What about circles? How can I fit circles around these coins? Sanja Fidler CSC420: Intro to Image Understanding 20 / 1
45 Hough Transform: Circle Detection Assume we are looking for a circle of known radius r Circle: (x a) 2 +(y b) 2 = r 2 Hough space (a, b): A point (x 0, y 0 )mapsto (a x 0 ) 2 +(b y 0 ) 2 = r 2! a circle around (x 0, y 0 )withradiusr Each image point votes for a circle in Hough space [Source: H. Rhody] Sanja Fidler CSC420: Intro to Image Understanding 21 / 1
46 Hough Transform: Circle Detection What if we don t know r? Hough space:? [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 22 / 1
47 Hough Transform: Circle Detection What if we don t know r? Hough space: conics [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 23 / 1

48 Hough Transform: Circle Detection Find the coins [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 24 / 1

49 Hough Transform: Circle Detection Iris detection [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 25 / 1

50 Dana H. Ballard, Generalizing the Hough Transform to Detect Arbitrary Shapes, 1980 Sanja Fidler CSC420: Intro to Image Understanding 26 / 1 Generalized Hough Voting Hough Voting for general shapes
51 Implicit Shape Model Implicit Shape Model adopts the idea of voting Basic idea: Find interest points in an image Match patch around each interest point to a training patch Vote for object center given that training instance Sanja Fidler CSC420: Intro to Image Understanding 27 / 1
52 Implicit Shape Model: Basic Idea Vote for object center Sanja Fidler CSC420: Intro to Image Understanding 28 / 1
53 Implicit Shape Model: Basic Idea Vote for object center Sanja Fidler CSC420: Intro to Image Understanding 28 / 1
54 Implicit Shape Model: Basic Idea Vote for object center Sanja Fidler CSC420: Intro to Image Understanding 28 / 1
55 Implicit Shape Model: Basic Idea Vote for object center Sanja Fidler CSC420: Intro to Image Understanding 28 / 1

56 Implicit Shape Model: Basic Idea Vote for object center Sanja Fidler CSC420: Intro to Image Understanding 28 / 1
57 Implicit Shape Model: Basic Idea Find the patches that produced the peak Sanja Fidler CSC420: Intro to Image Understanding 28 / 1
58 Implicit Shape Model: Basic Idea Place a box around these patches! objects! Sanja Fidler CSC420: Intro to Image Understanding 28 / 1
59 Implicit Shape Model: Basic Idea Really easy. Only one problem... Would be slow... How do we make it fast? Sanja Fidler CSC420: Intro to Image Understanding 28 / 1
 Sanja Fidler CSC420: Intro to Image Understanding 28 /")
60 Implicit Shape Model: Basic Idea Visual vocabulary (we saw this for retrieval) Compare each patch to a small set of visual words (clusters) Sanja Fidler CSC420: Intro to Image Understanding 28 / 1
61 Implicit Shape Model: Basic Idea Training: Getting the vocabulary Sanja Fidler CSC420: Intro to Image Understanding 28 / 1

62 Implicit Shape Model: Basic Idea Find interest points in each training image Sanja Fidler CSC420: Intro to Image Understanding 28 / 1
63 Implicit Shape Model: Basic Idea Collect patches around each interest point Sanja Fidler CSC420: Intro to Image Understanding 28 / 1

64 Implicit Shape Model: Basic Idea Collect patches across all training examples Sanja Fidler CSC420: Intro to Image Understanding 28 / 1

65 Implicit Shape Model: Basic Idea Cluster the patches to get a small set of representative patches Sanja Fidler CSC420: Intro to Image Understanding 28 / 1

66 Implicit Shape Model: Training Represent each training patch with the closest visual word. Record the displacement vectors for each word across all training examples. Training image Visual codeword with displacement vectors [Leibe et al. IJCV 2008] Sanja Fidler CSC420: Intro to Image Understanding 29 / 1

67 Implicit Shape Model: Test At test times detect interest points Assign each patch around interest point to closes visual word Vote with all displacement vectors for that word [Source: B. Leibe] Sanja Fidler CSC420: Intro to Image Understanding 30 / 1

68 Recognition Pipeline [Source: B. Leibe] Sanja Fidler CSC420: Intro to Image Understanding 31 / 1
69 Recognition Summary Apply interest points and extract features around selected locations. Match those to the codebook. Collect consistent configurations using Generalized Hough Transform. Each entry votes for a set of possible positions and scales in continuous space. Extract maxima in the continuous space using Mean Shift. Refinement can be done by sampling more local features. [Source: R. Urtasun] Sanja Fidler CSC420: Intro to Image Understanding 32 / 1

70 Example Original image [Source: B. Leibe, credit: R. Urtasun] Sanja Fidler CSC420: Intro to Image Understanding 33 / 1

71 Example Interest points [Source: B. Leibe, credit: R. Urtasun] Sanja Fidler CSC420: Intro to Image Understanding 33 / 1

72 Example Matched patches [Source: B. Leibe, credit: R. Urtasun] Sanja Fidler CSC420: Intro to Image Understanding 33 / 1

73 Example [Source: B. Leibe, credit: R. Urtasun] Voting space Sanja Fidler CSC420: Intro to Image Understanding 33 / 1
74 Example 1 st hypothesis [Source: B. Leibe, credit: R. Urtasun] Sanja Fidler CSC420: Intro to Image Understanding 33 / 1
75 Example 2 nd hypothesis [Source: B. Leibe, credit: R. Urtasun] Sanja Fidler CSC420: Intro to Image Understanding 33 / 1
76 Example 3 rd hypothesis [Source: B. Leibe, credit: R. Urtasun] Sanja Fidler CSC420: Intro to Image Understanding 33 / 1
77 Scale Invariant Voting Scale-invariant feature selection Scale-invariant interest points Rescale extracted patches Match to constant-size codebook Generate scale votes Scale as 3rd dimension in voting space x vote = x img x occ (s img /s occ ) y vote = y img y occ (s img /s occ ) s vote = s img /s occ Search for maxima in 3D voting space [Source: B. Leibe, credit: R. Urtasun] Sanja Fidler CSC420: Intro to Image Understanding 34 / 1

78 Scale Invariant Voting s Search window y x [Slide credit: R. Urtasun] Sanja Fidler CSC420: Intro to Image Understanding 35 / 1
79 Scale Voting: E cient Computation Continuous Generalized Hough Transform Binned accumulator array similar to standard Gen. Hough Transf. Quickly identify candidate maxima locations Refine locations by Mean-Shift search only around those points Avoid quantization e ects by keeping exact vote locations. s s s s y y y y x Scale votes x Binned accum. array x Candidate maxima x Refinement (Mean-Shift) [Source: B. Leibe, credit: R. Urtasun] Sanja Fidler CSC420: Intro to Image Understanding 36 / 1


80 Extension: Rotation-Invariant Detection Polar instead of Cartesian voting scheme Recognize objects under image-plane rotations Possibility to share parts between articulations But also increases false positive detections [Source: B. Leibe, credit: R. Urtasun] Sanja Fidler CSC420: Intro to Image Understanding 37 / 1
81 Sometimes it s Necessary Figure from [Mikolajczyk et al., CVPR 06] B. Leibe 20 [Source: B. Leibe, credit: R. Urtasun] Sanja Fidler CSC420: Intro to Image Understanding 38 / 1

82 Recognition and Segmentation Augment each visual word with meta-deta: for example, segmentation mask Sanja Fidler CSC420: Intro to Image Understanding 39 / 1





83 Recognition and Segmentation Local Features Matched Codebook Entries Probabilistic Voting Segmentation Backproject Metainformation y s x 3D Voting Space (continuous) Pixel Contributions Backprojected Hypotheses Backprojection of Maxima Sanja Fidler CSC420: Intro to Image Understanding 40 / 1

84 Results [Source: B. Leibe] Sanja Fidler CSC420: Intro to Image Understanding 41 / 1

85 Results [Source: B. Leibe] Sanja Fidler CSC420: Intro to Image Understanding 42 / 1



![B. Leibe]](/docs-images/73/68344001/images/86-3.jpg "Sanja")



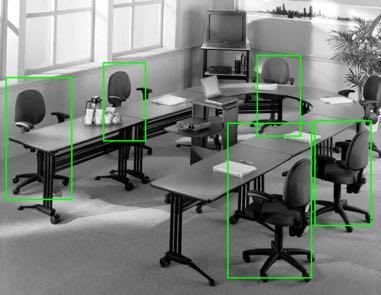





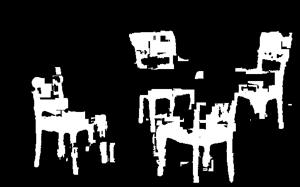



86 Results Dining room chairs Office chairs [Source: B. Leibe] Sanja Fidler CSC420: Intro to Image Understanding 43 / 1

87 Results [Source: B. Leibe] Sanja Fidler CSC420: Intro to Image Understanding 44 / 1


88 Inferring Other Information: Part Labels Training Test Output [Source: B. Leibe] Sanja Fidler CSC420: Intro to Image Understanding 45 / 1



89 Inferring Other Information: Part Labels [Source: B. Leibe] Sanja Fidler CSC420: Intro to Image Understanding 46 / 1

90 Inferring Other Information: Depth Depth from a single image [Source: B. Leibe] Sanja Fidler CSC420: Intro to Image Understanding 47 / 1
91 Conclusion Exploits a lot of parts (as many as interest points) Very simple Voting scheme: Generalized Hough Transform Works well, but not as well as Deformable Part-based Models with latent SVM training (next time) Extensions: train the weights discriminatively. Code, datasets & several pre-trained detectors available at [Source: B. Leibe, credit: R. Urtasun] Sanja Fidler CSC420: Intro to Image Understanding 48 / 1
Fitting: The Hough transform
 Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
Fitting: The Hough transform
 Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
Fitting: The Hough transform
 Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
Model Fitting: The Hough transform II
 Model Fitting: The Hough transform II Guido Gerig, CS6640 Image Processing, Utah Theory: See handwritten notes GG: HT-notes-GG-II.pdf Credits: S. Narasimhan, CMU, Spring 2006 15-385,-685, Link Svetlana
Model Fitting: The Hough transform II Guido Gerig, CS6640 Image Processing, Utah Theory: See handwritten notes GG: HT-notes-GG-II.pdf Credits: S. Narasimhan, CMU, Spring 2006 15-385,-685, Link Svetlana
Deformable Part Models
 CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
Previously. Part-based and local feature models for generic object recognition. Bag-of-words model 4/20/2011
 Previously Part-based and local feature models for generic object recognition Wed, April 20 UT-Austin Discriminative classifiers Boosting Nearest neighbors Support vector machines Useful for object recognition
Previously Part-based and local feature models for generic object recognition Wed, April 20 UT-Austin Discriminative classifiers Boosting Nearest neighbors Support vector machines Useful for object recognition
Part based models for recognition. Kristen Grauman
 Part based models for recognition Kristen Grauman UT Austin Limitations of window-based models Not all objects are box-shaped Assuming specific 2d view of object Local components themselves do not necessarily
Part based models for recognition Kristen Grauman UT Austin Limitations of window-based models Not all objects are box-shaped Assuming specific 2d view of object Local components themselves do not necessarily
Finding 2D Shapes and the Hough Transform
 CS 4495 Computer Vision Finding 2D Shapes and the Aaron Bobick School of Interactive Computing Administrivia Today: Modeling Lines and Finding them CS4495: Problem set 1 is still posted. Please read the
CS 4495 Computer Vision Finding 2D Shapes and the Aaron Bobick School of Interactive Computing Administrivia Today: Modeling Lines and Finding them CS4495: Problem set 1 is still posted. Please read the
Object Category Detection. Slides mostly from Derek Hoiem
 Object Category Detection Slides mostly from Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical template matching with sliding window Part-based Models
Object Category Detection Slides mostly from Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical template matching with sliding window Part-based Models
Patch-based Object Recognition. Basic Idea
 Patch-based Object Recognition 1! Basic Idea Determine interest points in image Determine local image properties around interest points Use local image properties for object classification Example: Interest
Patch-based Object Recognition 1! Basic Idea Determine interest points in image Determine local image properties around interest points Use local image properties for object classification Example: Interest
Beyond bags of features: Adding spatial information. Many slides adapted from Fei-Fei Li, Rob Fergus, and Antonio Torralba
 Beyond bags of features: Adding spatial information Many slides adapted from Fei-Fei Li, Rob Fergus, and Antonio Torralba Adding spatial information Forming vocabularies from pairs of nearby features doublets
Beyond bags of features: Adding spatial information Many slides adapted from Fei-Fei Li, Rob Fergus, and Antonio Torralba Adding spatial information Forming vocabularies from pairs of nearby features doublets
Part-based and local feature models for generic object recognition
 Part-based and local feature models for generic object recognition May 28 th, 2015 Yong Jae Lee UC Davis Announcements PS2 grades up on SmartSite PS2 stats: Mean: 80.15 Standard Dev: 22.77 Vote on piazza
Part-based and local feature models for generic object recognition May 28 th, 2015 Yong Jae Lee UC Davis Announcements PS2 grades up on SmartSite PS2 stats: Mean: 80.15 Standard Dev: 22.77 Vote on piazza
Image Features: Local Descriptors. Sanja Fidler CSC420: Intro to Image Understanding 1/ 58
 Image Features: Local Descriptors Sanja Fidler CSC420: Intro to Image Understanding 1/ 58 [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 2/ 58 Local Features Detection: Identify
Image Features: Local Descriptors Sanja Fidler CSC420: Intro to Image Understanding 1/ 58 [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 2/ 58 Local Features Detection: Identify
Visuelle Perzeption für Mensch- Maschine Schnittstellen
 Visuelle Perzeption für Mensch- Maschine Schnittstellen Vorlesung, WS 2009 Prof. Dr. Rainer Stiefelhagen Dr. Edgar Seemann Institut für Anthropomatik Universität Karlsruhe (TH) http://cvhci.ira.uka.de
Visuelle Perzeption für Mensch- Maschine Schnittstellen Vorlesung, WS 2009 Prof. Dr. Rainer Stiefelhagen Dr. Edgar Seemann Institut für Anthropomatik Universität Karlsruhe (TH) http://cvhci.ira.uka.de
Lecture 8: Fitting. Tuesday, Sept 25
 Lecture 8: Fitting Tuesday, Sept 25 Announcements, schedule Grad student extensions Due end of term Data sets, suggestions Reminder: Midterm Tuesday 10/9 Problem set 2 out Thursday, due 10/11 Outline Review
Lecture 8: Fitting Tuesday, Sept 25 Announcements, schedule Grad student extensions Due end of term Data sets, suggestions Reminder: Midterm Tuesday 10/9 Problem set 2 out Thursday, due 10/11 Outline Review
Recognition. Topics that we will try to cover:
 Recognition Topics that we will try to cover: Indexing for fast retrieval (we still owe this one) Object classification (we did this one already) Neural Networks Object class detection Hough-voting techniques
Recognition Topics that we will try to cover: Indexing for fast retrieval (we still owe this one) Object classification (we did this one already) Neural Networks Object class detection Hough-voting techniques
Announcements, schedule. Lecture 8: Fitting. Weighted graph representation. Outline. Segmentation by Graph Cuts. Images as graphs
 Announcements, schedule Lecture 8: Fitting Tuesday, Sept 25 Grad student etensions Due of term Data sets, suggestions Reminder: Midterm Tuesday 10/9 Problem set 2 out Thursday, due 10/11 Outline Review
Announcements, schedule Lecture 8: Fitting Tuesday, Sept 25 Grad student etensions Due of term Data sets, suggestions Reminder: Midterm Tuesday 10/9 Problem set 2 out Thursday, due 10/11 Outline Review
Category vs. instance recognition
 Category vs. instance recognition Category: Find all the people Find all the buildings Often within a single image Often sliding window Instance: Is this face James? Find this specific famous building
Category vs. instance recognition Category: Find all the people Find all the buildings Often within a single image Often sliding window Instance: Is this face James? Find this specific famous building
Fitting: Voting and the Hough Transform April 23 rd, Yong Jae Lee UC Davis
 Fitting: Voting and the Hough Transform April 23 rd, 2015 Yong Jae Lee UC Davis Last time: Grouping Bottom-up segmentation via clustering To find mid-level regions, tokens General choices -- features,
Fitting: Voting and the Hough Transform April 23 rd, 2015 Yong Jae Lee UC Davis Last time: Grouping Bottom-up segmentation via clustering To find mid-level regions, tokens General choices -- features,
Prof. Kristen Grauman
 Fitting Prof. Kristen Grauman UT Austin Fitting Want to associate a model with observed features [Fig from Marszalek & Schmid, 2007] For eample, the model could be a line, a circle, or an arbitrary shape.
Fitting Prof. Kristen Grauman UT Austin Fitting Want to associate a model with observed features [Fig from Marszalek & Schmid, 2007] For eample, the model could be a line, a circle, or an arbitrary shape.
Beyond Bags of features Spatial information & Shape models
 Beyond Bags of features Spatial information & Shape models Jana Kosecka Many slides adapted from S. Lazebnik, FeiFei Li, Rob Fergus, and Antonio Torralba Detection, recognition (so far )! Bags of features
Beyond Bags of features Spatial information & Shape models Jana Kosecka Many slides adapted from S. Lazebnik, FeiFei Li, Rob Fergus, and Antonio Torralba Detection, recognition (so far )! Bags of features
Local features: detection and description. Local invariant features
 Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
Patch Descriptors. CSE 455 Linda Shapiro
 Patch Descriptors CSE 455 Linda Shapiro How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Patch Descriptors CSE 455 Linda Shapiro How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
EECS 442 Computer vision. Object Recognition
 EECS 442 Computer vision Object Recognition Intro Recognition of 3D objects Recognition of object categories: Bag of world models Part based models 3D object categorization Challenges: intraclass variation
EECS 442 Computer vision Object Recognition Intro Recognition of 3D objects Recognition of object categories: Bag of world models Part based models 3D object categorization Challenges: intraclass variation
Lecture 9: Hough Transform and Thresholding base Segmentation
 #1 Lecture 9: Hough Transform and Thresholding base Segmentation Saad Bedros sbedros@umn.edu Hough Transform Robust method to find a shape in an image Shape can be described in parametric form A voting
#1 Lecture 9: Hough Transform and Thresholding base Segmentation Saad Bedros sbedros@umn.edu Hough Transform Robust method to find a shape in an image Shape can be described in parametric form A voting
RANSAC and some HOUGH transform
 RANSAC and some HOUGH transform Thank you for the slides. They come mostly from the following source Dan Huttenlocher Cornell U Matching and Fitting Recognition and matching are closely related to fitting
RANSAC and some HOUGH transform Thank you for the slides. They come mostly from the following source Dan Huttenlocher Cornell U Matching and Fitting Recognition and matching are closely related to fitting
Computer Vision 6 Segmentation by Fitting
 Computer Vision 6 Segmentation by Fitting MAP-I Doctoral Programme Miguel Tavares Coimbra Outline The Hough Transform Fitting Lines Fitting Curves Fitting as a Probabilistic Inference Problem Acknowledgements:
Computer Vision 6 Segmentation by Fitting MAP-I Doctoral Programme Miguel Tavares Coimbra Outline The Hough Transform Fitting Lines Fitting Curves Fitting as a Probabilistic Inference Problem Acknowledgements:
Computer Vision Lecture 6
 Computer Vision Lecture 6 Segmentation 12.11.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Course Outline Image Processing Basics Structure Extraction Segmentation
Computer Vision Lecture 6 Segmentation 12.11.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Course Outline Image Processing Basics Structure Extraction Segmentation
Feature Matching and Robust Fitting
 Feature Matching and Robust Fitting Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Project 2 questions? This
Feature Matching and Robust Fitting Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Project 2 questions? This
Object detection. Announcements. Last time: Mid-level cues 2/23/2016. Wed Feb 24 Kristen Grauman UT Austin
 Object detection Wed Feb 24 Kristen Grauman UT Austin Announcements Reminder: Assignment 2 is due Mar 9 and Mar 10 Be ready to run your code again on a new test set on Mar 10 Vision talk next Tuesday 11
Object detection Wed Feb 24 Kristen Grauman UT Austin Announcements Reminder: Assignment 2 is due Mar 9 and Mar 10 Be ready to run your code again on a new test set on Mar 10 Vision talk next Tuesday 11
Backprojection Revisited: Scalable Multi-view Object Detection and Similarity Metrics for Detections
 Backprojection Revisited: Scalable Multi-view Object Detection and Similarity Metrics for Detections Nima Razavi 1, Juergen Gall 1, and Luc Van Gool 1,2 1 Computer Vision Laboratory, ETH Zurich 2 ESAT-PSI/IBBT,
Backprojection Revisited: Scalable Multi-view Object Detection and Similarity Metrics for Detections Nima Razavi 1, Juergen Gall 1, and Luc Van Gool 1,2 1 Computer Vision Laboratory, ETH Zurich 2 ESAT-PSI/IBBT,
Example: Line fitting. Difficulty of line fitting. Fitting lines. Fitting lines. Fitting lines. Voting 9/22/2009
 Histograms in Matla Fitting: Voting and the Hough Transform Tuesda, Sept Kristen Grauman UT-Austin a = A(:); % reshapes matri A into vector, columns first H = hist(a(:), 10); %t takes a histogram from
Histograms in Matla Fitting: Voting and the Hough Transform Tuesda, Sept Kristen Grauman UT-Austin a = A(:); % reshapes matri A into vector, columns first H = hist(a(:), 10); %t takes a histogram from
Patch Descriptors. EE/CSE 576 Linda Shapiro
 Patch Descriptors EE/CSE 576 Linda Shapiro 1 How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Patch Descriptors EE/CSE 576 Linda Shapiro 1 How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Feature Matching + Indexing and Retrieval
 CS 1699: Intro to Computer Vision Feature Matching + Indexing and Retrieval Prof. Adriana Kovashka University of Pittsburgh October 1, 2015 Today Review (fitting) Hough transform RANSAC Matching points
CS 1699: Intro to Computer Vision Feature Matching + Indexing and Retrieval Prof. Adriana Kovashka University of Pittsburgh October 1, 2015 Today Review (fitting) Hough transform RANSAC Matching points
Object Category Detection: Sliding Windows
 04/10/12 Object Category Detection: Sliding Windows Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical
04/10/12 Object Category Detection: Sliding Windows Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical
Fitting. Lecture 8. Cristian Sminchisescu. Slide credits: K. Grauman, S. Seitz, S. Lazebnik, D. Forsyth, J. Ponce
 Fitting Lecture 8 Cristian Sminchisescu Slide credits: K. Grauman, S. Seitz, S. Lazebnik, D. Forsyth, J. Ponce Fitting We want to associate a model with observed features [Fig from Marszalek & Schmid,
Fitting Lecture 8 Cristian Sminchisescu Slide credits: K. Grauman, S. Seitz, S. Lazebnik, D. Forsyth, J. Ponce Fitting We want to associate a model with observed features [Fig from Marszalek & Schmid,
Computer Vision Lecture 6
 Course Outline Computer Vision Lecture 6 Segmentation Image Processing Basics Structure Extraction Segmentation Segmentation as Clustering Graph-theoretic Segmentation 12.11.2015 Recognition Global Representations
Course Outline Computer Vision Lecture 6 Segmentation Image Processing Basics Structure Extraction Segmentation Segmentation as Clustering Graph-theoretic Segmentation 12.11.2015 Recognition Global Representations
Local features: detection and description May 12 th, 2015
 Local features: detection and description May 12 th, 2015 Yong Jae Lee UC Davis Announcements PS1 grades up on SmartSite PS1 stats: Mean: 83.26 Standard Dev: 28.51 PS2 deadline extended to Saturday, 11:59
Local features: detection and description May 12 th, 2015 Yong Jae Lee UC Davis Announcements PS1 grades up on SmartSite PS1 stats: Mean: 83.26 Standard Dev: 28.51 PS2 deadline extended to Saturday, 11:59
Learning an Alphabet of Shape and Appearance for Multi-Class Object Detection
 Learning an Alphabet of Shape and Appearance for Multi-Class Object Detection Andreas Opelt, Axel Pinz and Andrew Zisserman 09-June-2009 Irshad Ali (Department of CS, AIT) 09-June-2009 1 / 20 Object class
Learning an Alphabet of Shape and Appearance for Multi-Class Object Detection Andreas Opelt, Axel Pinz and Andrew Zisserman 09-June-2009 Irshad Ali (Department of CS, AIT) 09-June-2009 1 / 20 Object class
Local features and image matching. Prof. Xin Yang HUST
 Local features and image matching Prof. Xin Yang HUST Last time RANSAC for robust geometric transformation estimation Translation, Affine, Homography Image warping Given a 2D transformation T and a source
Local features and image matching Prof. Xin Yang HUST Last time RANSAC for robust geometric transformation estimation Translation, Affine, Homography Image warping Given a 2D transformation T and a source
Detection III: Analyzing and Debugging Detection Methods
 CS 1699: Intro to Computer Vision Detection III: Analyzing and Debugging Detection Methods Prof. Adriana Kovashka University of Pittsburgh November 17, 2015 Today Review: Deformable part models How can
CS 1699: Intro to Computer Vision Detection III: Analyzing and Debugging Detection Methods Prof. Adriana Kovashka University of Pittsburgh November 17, 2015 Today Review: Deformable part models How can
Hough Transform and RANSAC
 CS4501: Introduction to Computer Vision Hough Transform and RANSAC Various slides from previous courses by: D.A. Forsyth (Berkeley / UIUC), I. Kokkinos (Ecole Centrale / UCL). S. Lazebnik (UNC / UIUC),
CS4501: Introduction to Computer Vision Hough Transform and RANSAC Various slides from previous courses by: D.A. Forsyth (Berkeley / UIUC), I. Kokkinos (Ecole Centrale / UCL). S. Lazebnik (UNC / UIUC),
HOUGH TRANSFORM CS 6350 C V
 HOUGH TRANSFORM CS 6350 C V HOUGH TRANSFORM The problem: Given a set of points in 2-D, find if a sub-set of these points, fall on a LINE. Hough Transform One powerful global method for detecting edges
HOUGH TRANSFORM CS 6350 C V HOUGH TRANSFORM The problem: Given a set of points in 2-D, find if a sub-set of these points, fall on a LINE. Hough Transform One powerful global method for detecting edges
Feature descriptors. Alain Pagani Prof. Didier Stricker. Computer Vision: Object and People Tracking
 Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Midterm Wed. Local features: detection and description. Today. Last time. Local features: main components. Goal: interest operator repeatability
 Midterm Wed. Local features: detection and description Monday March 7 Prof. UT Austin Covers material up until 3/1 Solutions to practice eam handed out today Bring a 8.5 11 sheet of notes if you want Review
Midterm Wed. Local features: detection and description Monday March 7 Prof. UT Austin Covers material up until 3/1 Solutions to practice eam handed out today Bring a 8.5 11 sheet of notes if you want Review
Local invariant features
 Local invariant features Tuesday, Oct 28 Kristen Grauman UT-Austin Today Some more Pset 2 results Pset 2 returned, pick up solutions Pset 3 is posted, due 11/11 Local invariant features Detection of interest
Local invariant features Tuesday, Oct 28 Kristen Grauman UT-Austin Today Some more Pset 2 results Pset 2 returned, pick up solutions Pset 3 is posted, due 11/11 Local invariant features Detection of interest
Efficient Kernels for Identifying Unbounded-Order Spatial Features
 Efficient Kernels for Identifying Unbounded-Order Spatial Features Yimeng Zhang Carnegie Mellon University yimengz@andrew.cmu.edu Tsuhan Chen Cornell University tsuhan@ece.cornell.edu Abstract Higher order
Efficient Kernels for Identifying Unbounded-Order Spatial Features Yimeng Zhang Carnegie Mellon University yimengz@andrew.cmu.edu Tsuhan Chen Cornell University tsuhan@ece.cornell.edu Abstract Higher order
Instance-level recognition part 2
 Visual Recognition and Machine Learning Summer School Paris 2011 Instance-level recognition part 2 Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique,
Visual Recognition and Machine Learning Summer School Paris 2011 Instance-level recognition part 2 Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique,
Recap Image Classification with Bags of Local Features
 Recap Image Classification with Bags of Local Features Bag of Feature models were the state of the art for image classification for a decade BoF may still be the state of the art for instance retrieval
Recap Image Classification with Bags of Local Features Bag of Feature models were the state of the art for image classification for a decade BoF may still be the state of the art for instance retrieval
Keypoint-based Recognition and Object Search
 03/08/11 Keypoint-based Recognition and Object Search Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Notices I m having trouble connecting to the web server, so can t post lecture
03/08/11 Keypoint-based Recognition and Object Search Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Notices I m having trouble connecting to the web server, so can t post lecture
Incremental Learning of Object Detectors Using a Visual Shape Alphabet
 Incremental Learning of Object Detectors Using a Visual Shape Alphabet A. Opelt, A. Pinz & A. Zisserman CVPR 06 Presented by Medha Bhargava* * Several slides adapted from authors presentation, CVPR 06
Incremental Learning of Object Detectors Using a Visual Shape Alphabet A. Opelt, A. Pinz & A. Zisserman CVPR 06 Presented by Medha Bhargava* * Several slides adapted from authors presentation, CVPR 06
Motion illusion, rotating snakes
 Motion illusion, rotating snakes Local features: main components 1) Detection: Find a set of distinctive key points. 2) Description: Extract feature descriptor around each interest point as vector. x 1
Motion illusion, rotating snakes Local features: main components 1) Detection: Find a set of distinctive key points. 2) Description: Extract feature descriptor around each interest point as vector. x 1
Local Image Features
 Local Image Features Ali Borji UWM Many slides from James Hayes, Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Overview of Keypoint Matching 1. Find a set of distinctive key- points A 1 A 2 A 3 B 3
Local Image Features Ali Borji UWM Many slides from James Hayes, Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Overview of Keypoint Matching 1. Find a set of distinctive key- points A 1 A 2 A 3 B 3
Automatic Image Alignment (feature-based)
") Automatic Image Alignment (feature-based) Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2006 Today s lecture Feature
Automatic Image Alignment (feature-based) Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2006 Today s lecture Feature
Lecture 4: Finding lines: from detection to model fitting
 Lecture 4: Finding lines: from detection to model fitting Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today Edge detection Canny edge detector Line fitting Hough Transform RANSAC (Problem
Lecture 4: Finding lines: from detection to model fitting Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today Edge detection Canny edge detector Line fitting Hough Transform RANSAC (Problem
Instance-level recognition II.
 Reconnaissance d objets et vision artificielle 2010 Instance-level recognition II. Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique, Ecole Normale
Reconnaissance d objets et vision artificielle 2010 Instance-level recognition II. Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique, Ecole Normale
Object Recognition and Detection
 CS 2770: Computer Vision Object Recognition and Detection Prof. Adriana Kovashka University of Pittsburgh March 16, 21, 23, 2017 Plan for the next few lectures Recognizing the category in the image as
CS 2770: Computer Vision Object Recognition and Detection Prof. Adriana Kovashka University of Pittsburgh March 16, 21, 23, 2017 Plan for the next few lectures Recognizing the category in the image as
2D Image Processing Feature Descriptors
 2D Image Processing Feature Descriptors Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Overview
2D Image Processing Feature Descriptors Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Overview
EECS 442 Computer vision. Fitting methods
 EECS 442 Computer vision Fitting methods - Problem formulation - Least square methods - RANSAC - Hough transforms - Multi-model fitting - Fitting helps matching! Reading: [HZ] Chapters: 4, 11 [FP] Chapters:
EECS 442 Computer vision Fitting methods - Problem formulation - Least square methods - RANSAC - Hough transforms - Multi-model fitting - Fitting helps matching! Reading: [HZ] Chapters: 4, 11 [FP] Chapters:
arxiv: v1 [cs.cv] 7 Aug 2017
![arxiv: v1 [cs.cv] 7 Aug 2017](/thumbs/81/83599070.jpg "arxiv: v1 [cs.cv] 7 Aug 2017") LEARNING TO SEGMENT ON TINY DATASETS: A NEW SHAPE MODEL Maxime Tremblay, André Zaccarin Computer Vision and Systems Laboratory, Université Laval Quebec City (QC), Canada arxiv:1708.02165v1 [cs.cv] 7 Aug
LEARNING TO SEGMENT ON TINY DATASETS: A NEW SHAPE MODEL Maxime Tremblay, André Zaccarin Computer Vision and Systems Laboratory, Université Laval Quebec City (QC), Canada arxiv:1708.02165v1 [cs.cv] 7 Aug
Bag-of-features. Cordelia Schmid
 Bag-of-features for category classification Cordelia Schmid Visual search Particular objects and scenes, large databases Category recognition Image classification: assigning a class label to the image
Bag-of-features for category classification Cordelia Schmid Visual search Particular objects and scenes, large databases Category recognition Image classification: assigning a class label to the image
OBJECT CATEGORIZATION
 OBJECT CATEGORIZATION Ing. Lorenzo Seidenari e-mail: seidenari@dsi.unifi.it Slides: Ing. Lamberto Ballan November 18th, 2009 What is an Object? Merriam-Webster Definition: Something material that may be
OBJECT CATEGORIZATION Ing. Lorenzo Seidenari e-mail: seidenari@dsi.unifi.it Slides: Ing. Lamberto Ballan November 18th, 2009 What is an Object? Merriam-Webster Definition: Something material that may be
Category-level localization
 Category-level localization Cordelia Schmid Recognition Classification Object present/absent in an image Often presence of a significant amount of background clutter Localization / Detection Localize object
Category-level localization Cordelia Schmid Recognition Classification Object present/absent in an image Often presence of a significant amount of background clutter Localization / Detection Localize object
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.
 CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 20 Object Recognition 3 Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering Lab
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 20 Object Recognition 3 Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering Lab
Part-based models. Lecture 10
 Part-based models Lecture 10 Overview Representation Location Appearance Generative interpretation Learning Distance transforms Other approaches using parts Felzenszwalb, Girshick, McAllester, Ramanan
Part-based models Lecture 10 Overview Representation Location Appearance Generative interpretation Learning Distance transforms Other approaches using parts Felzenszwalb, Girshick, McAllester, Ramanan
Methods for Representing and Recognizing 3D objects
 Methods for Representing and Recognizing 3D objects part 1 Silvio Savarese University of Michigan at Ann Arbor Object: Building, 45º pose, 8-10 meters away Object: Person, back; 1-2 meters away Object:
Methods for Representing and Recognizing 3D objects part 1 Silvio Savarese University of Michigan at Ann Arbor Object: Building, 45º pose, 8-10 meters away Object: Person, back; 1-2 meters away Object:
Local Image Features
 Local Image Features Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial This section: correspondence and alignment
Local Image Features Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial This section: correspondence and alignment
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 16: Bag-of-words models Object Bag of words Announcements Project 3: Eigenfaces due Wednesday, November 11 at 11:59pm solo project Final project presentations:
CS6670: Computer Vision Noah Snavely Lecture 16: Bag-of-words models Object Bag of words Announcements Project 3: Eigenfaces due Wednesday, November 11 at 11:59pm solo project Final project presentations:
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.
 CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 20 Object Recognition 3 Mani Golparvar-Fard Department of Civil and Environmental Engineering Department of Computer Science 3129D,
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 20 Object Recognition 3 Mani Golparvar-Fard Department of Civil and Environmental Engineering Department of Computer Science 3129D,
Combined Object Categorization and Segmentation with an Implicit Shape Model
 in ECCV 04 Workshop on Statistical Learning in Computer Vision, Prague, May 2004. Combined Object Categorization and Segmentation with an Implicit Shape Model Bastian Leibe 1, Ales Leonardis 2, and Bernt
in ECCV 04 Workshop on Statistical Learning in Computer Vision, Prague, May 2004. Combined Object Categorization and Segmentation with an Implicit Shape Model Bastian Leibe 1, Ales Leonardis 2, and Bernt
Visual Object Recognition
 Perceptual and Sensory Augmented Computing Visual Object Recognition Tutorial Visual Object Recognition Bastian Leibe Computer Vision Laboratory ETH Zurich Chicago, 14.07.2008 & Kristen Grauman Department
Perceptual and Sensory Augmented Computing Visual Object Recognition Tutorial Visual Object Recognition Bastian Leibe Computer Vision Laboratory ETH Zurich Chicago, 14.07.2008 & Kristen Grauman Department
Local Image Features
 Local Image Features Computer Vision Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Flashed Face Distortion 2nd Place in the 8th Annual Best
Local Image Features Computer Vision Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Flashed Face Distortion 2nd Place in the 8th Annual Best
Object Detection Design challenges
 Object Detection Design challenges How to efficiently search for likely objects Even simple models require searching hundreds of thousands of positions and scales Feature design and scoring How should
Object Detection Design challenges How to efficiently search for likely objects Even simple models require searching hundreds of thousands of positions and scales Feature design and scoring How should
High-Level Computer Vision
 High-Level Computer Vision Detection of classes of objects (faces, motorbikes, trees, cheetahs) in images Recognition of specific objects such as George Bush or machine part #45732 Classification of images
High-Level Computer Vision Detection of classes of objects (faces, motorbikes, trees, cheetahs) in images Recognition of specific objects such as George Bush or machine part #45732 Classification of images
Window based detectors
 Window based detectors CS 554 Computer Vision Pinar Duygulu Bilkent University (Source: James Hays, Brown) Today Window-based generic object detection basic pipeline boosting classifiers face detection
Window based detectors CS 554 Computer Vision Pinar Duygulu Bilkent University (Source: James Hays, Brown) Today Window-based generic object detection basic pipeline boosting classifiers face detection
10/03/11. Model Fitting. Computer Vision CS 143, Brown. James Hays. Slides from Silvio Savarese, Svetlana Lazebnik, and Derek Hoiem
 10/03/11 Model Fitting Computer Vision CS 143, Brown James Hays Slides from Silvio Savarese, Svetlana Lazebnik, and Derek Hoiem Fitting: find the parameters of a model that best fit the data Alignment:
10/03/11 Model Fitting Computer Vision CS 143, Brown James Hays Slides from Silvio Savarese, Svetlana Lazebnik, and Derek Hoiem Fitting: find the parameters of a model that best fit the data Alignment:
Fitting: Voting and the Hough Transform
 Last time: Grouping Fitting: Voting and the Hough Transform Monda, Fe 14 Prof. UT Austin Bottom-up segmentation via clustering To find mid-level regions, tokens General choices -- features, affinit functions,
Last time: Grouping Fitting: Voting and the Hough Transform Monda, Fe 14 Prof. UT Austin Bottom-up segmentation via clustering To find mid-level regions, tokens General choices -- features, affinit functions,
Computer Vision for HCI. Topics of This Lecture
 Computer Vision for HCI Interest Points Topics of This Lecture Local Invariant Features Motivation Requirements, Invariances Keypoint Localization Features from Accelerated Segment Test (FAST) Harris Shi-Tomasi
Computer Vision for HCI Interest Points Topics of This Lecture Local Invariant Features Motivation Requirements, Invariances Keypoint Localization Features from Accelerated Segment Test (FAST) Harris Shi-Tomasi
Feature descriptors and matching
 Feature descriptors and matching Detections at multiple scales Invariance of MOPS Intensity Scale Rotation Color and Lighting Out-of-plane rotation Out-of-plane rotation Better representation than color:
Feature descriptors and matching Detections at multiple scales Invariance of MOPS Intensity Scale Rotation Color and Lighting Out-of-plane rotation Out-of-plane rotation Better representation than color:
Detecting and Segmenting Humans in Crowded Scenes
 Detecting and Segmenting Humans in Crowded Scenes Mikel D. Rodriguez University of Central Florida 4000 Central Florida Blvd Orlando, Florida, 32816 mikel@cs.ucf.edu Mubarak Shah University of Central
Detecting and Segmenting Humans in Crowded Scenes Mikel D. Rodriguez University of Central Florida 4000 Central Florida Blvd Orlando, Florida, 32816 mikel@cs.ucf.edu Mubarak Shah University of Central
Compu&ng Correspondences in Geometric Datasets. 4.2 Symmetry & Symmetriza/on
 Compu&ng Correspondences in Geometric Datasets 4.2 Symmetry & Symmetriza/on Symmetry Invariance under a class of transformations Reflection Translation Rotation Reflection + Translation + global vs. partial
Compu&ng Correspondences in Geometric Datasets 4.2 Symmetry & Symmetriza/on Symmetry Invariance under a class of transformations Reflection Translation Rotation Reflection + Translation + global vs. partial
CS 558: Computer Vision 4 th Set of Notes
 1 CS 558: Computer Vision 4 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Overview Keypoint matching Hessian
1 CS 558: Computer Vision 4 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Overview Keypoint matching Hessian
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.
 CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Section 10 - Detectors part II Descriptors Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Section 10 - Detectors part II Descriptors Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering
Types of Edges. Why Edge Detection? Types of Edges. Edge Detection. Gradient. Edge Detection
 Why Edge Detection? How can an algorithm extract relevant information from an image that is enables the algorithm to recognize objects? The most important information for the interpretation of an image
Why Edge Detection? How can an algorithm extract relevant information from an image that is enables the algorithm to recognize objects? The most important information for the interpretation of an image
Semantic Segmentation without Annotating Segments
 Chapter 3 Semantic Segmentation without Annotating Segments Numerous existing object segmentation frameworks commonly utilize the object bounding box as a prior. In this chapter, we address semantic segmentation
Chapter 3 Semantic Segmentation without Annotating Segments Numerous existing object segmentation frameworks commonly utilize the object bounding box as a prior. In this chapter, we address semantic segmentation
Feature Detectors and Descriptors: Corners, Lines, etc.
 Feature Detectors and Descriptors: Corners, Lines, etc. Edges vs. Corners Edges = maxima in intensity gradient Edges vs. Corners Corners = lots of variation in direction of gradient in a small neighborhood
Feature Detectors and Descriptors: Corners, Lines, etc. Edges vs. Corners Edges = maxima in intensity gradient Edges vs. Corners Corners = lots of variation in direction of gradient in a small neighborhood
Perception IV: Place Recognition, Line Extraction
 Perception IV: Place Recognition, Line Extraction Davide Scaramuzza University of Zurich Margarita Chli, Paul Furgale, Marco Hutter, Roland Siegwart 1 Outline of Today s lecture Place recognition using
Perception IV: Place Recognition, Line Extraction Davide Scaramuzza University of Zurich Margarita Chli, Paul Furgale, Marco Hutter, Roland Siegwart 1 Outline of Today s lecture Place recognition using
Person Detection in Images using HoG + Gentleboost. Rahul Rajan June 1st July 15th CMU Q Robotics Lab
 Person Detection in Images using HoG + Gentleboost Rahul Rajan June 1st July 15th CMU Q Robotics Lab 1 Introduction One of the goals of computer vision Object class detection car, animal, humans Human
Person Detection in Images using HoG + Gentleboost Rahul Rajan June 1st July 15th CMU Q Robotics Lab 1 Introduction One of the goals of computer vision Object class detection car, animal, humans Human
Implicit Shape Models For 3D Shape Classification With a Continuous Voting Space
 Implicit Shape Models For 3D Shape Classification With a Continuous Voting Space Viktor Seib, Norman Link and Dietrich Paulus Active Vision Group (AGAS), University of Koblenz-Landau, Universitätsstr.
Implicit Shape Models For 3D Shape Classification With a Continuous Voting Space Viktor Seib, Norman Link and Dietrich Paulus Active Vision Group (AGAS), University of Koblenz-Landau, Universitätsstr.
Issues with Curve Detection Grouping (e.g., the Canny hysteresis thresholding procedure) Model tting They can be performed sequentially or simultaneou
 Model tting They can be performed sequentially or simultaneou") an edge image, nd line or curve segments present Given the image. in Line and Curves Detection 1 Issues with Curve Detection Grouping (e.g., the Canny hysteresis thresholding procedure) Model tting They
an edge image, nd line or curve segments present Given the image. in Line and Curves Detection 1 Issues with Curve Detection Grouping (e.g., the Canny hysteresis thresholding procedure) Model tting They
Local Features and Bag of Words Models
 10/14/11 Local Features and Bag of Words Models Computer Vision CS 143, Brown James Hays Slides from Svetlana Lazebnik, Derek Hoiem, Antonio Torralba, David Lowe, Fei Fei Li and others Computer Engineering
10/14/11 Local Features and Bag of Words Models Computer Vision CS 143, Brown James Hays Slides from Svetlana Lazebnik, Derek Hoiem, Antonio Torralba, David Lowe, Fei Fei Li and others Computer Engineering
A Discriminative Voting Scheme for Object Detection using Hough Forests
 VIJAY KUMAR B G, IOANNIS PATRAS: 1 A Discriminative Voting Scheme for Object Detection using Hough Forests Vijay Kumar.B.G vijay.kumar@elec.qmul.ac.uk Dr Ioannis Patras I.Patras@elec.qmul.ac.uk Multimedia
VIJAY KUMAR B G, IOANNIS PATRAS: 1 A Discriminative Voting Scheme for Object Detection using Hough Forests Vijay Kumar.B.G vijay.kumar@elec.qmul.ac.uk Dr Ioannis Patras I.Patras@elec.qmul.ac.uk Multimedia
Category-level Localization
 Category-level Localization Andrew Zisserman Visual Geometry Group University of Oxford http://www.robots.ox.ac.uk/~vgg Includes slides from: Ondra Chum, Alyosha Efros, Mark Everingham, Pedro Felzenszwalb,
Category-level Localization Andrew Zisserman Visual Geometry Group University of Oxford http://www.robots.ox.ac.uk/~vgg Includes slides from: Ondra Chum, Alyosha Efros, Mark Everingham, Pedro Felzenszwalb,
Computer Vision: Summary and Discussion
 12/05/2011 Computer Vision: Summary and Discussion Computer Vision CS 143, Brown James Hays Many slides from Derek Hoiem Announcements Today is last day of regular class Second quiz on Wednesday (Dec 7
12/05/2011 Computer Vision: Summary and Discussion Computer Vision CS 143, Brown James Hays Many slides from Derek Hoiem Announcements Today is last day of regular class Second quiz on Wednesday (Dec 7
Analysis: TextonBoost and Semantic Texton Forests. Daniel Munoz Februrary 9, 2009
 Analysis: TextonBoost and Semantic Texton Forests Daniel Munoz 16-721 Februrary 9, 2009 Papers [shotton-eccv-06] J. Shotton, J. Winn, C. Rother, A. Criminisi, TextonBoost: Joint Appearance, Shape and Context
Analysis: TextonBoost and Semantic Texton Forests Daniel Munoz 16-721 Februrary 9, 2009 Papers [shotton-eccv-06] J. Shotton, J. Winn, C. Rother, A. Criminisi, TextonBoost: Joint Appearance, Shape and Context
Object Recognition II
 Object Recognition II Linda Shapiro EE/CSE 576 with CNN slides from Ross Girshick 1 Outline Object detection the task, evaluation, datasets Convolutional Neural Networks (CNNs) overview and history Region-based
Object Recognition II Linda Shapiro EE/CSE 576 with CNN slides from Ross Girshick 1 Outline Object detection the task, evaluation, datasets Convolutional Neural Networks (CNNs) overview and history Region-based
Visual Object Recognition
 Visual Object Recognition -67777 Instructor: Daphna Weinshall, daphna@cs.huji.ac.il Office: Ross 211 Office hours: Sunday 12:00-13:00 1 Sources Recognizing and Learning Object Categories ICCV 2005 short
Visual Object Recognition -67777 Instructor: Daphna Weinshall, daphna@cs.huji.ac.il Office: Ross 211 Office hours: Sunday 12:00-13:00 1 Sources Recognizing and Learning Object Categories ICCV 2005 short
Stereo Epipolar Geometry for General Cameras. Sanja Fidler CSC420: Intro to Image Understanding 1 / 33
 Stereo Epipolar Geometry for General Cameras Sanja Fidler CSC420: Intro to Image Understanding 1 / 33 Stereo Epipolar geometry Case with two cameras with parallel optical axes General case Now this Sanja
Stereo Epipolar Geometry for General Cameras Sanja Fidler CSC420: Intro to Image Understanding 1 / 33 Stereo Epipolar geometry Case with two cameras with parallel optical axes General case Now this Sanja
Harder case. Image matching. Even harder case. Harder still? by Diva Sian. by swashford
 Image matching Harder case by Diva Sian by Diva Sian by scgbt by swashford Even harder case Harder still? How the Afghan Girl was Identified by Her Iris Patterns Read the story NASA Mars Rover images Answer
Image matching Harder case by Diva Sian by Diva Sian by scgbt by swashford Even harder case Harder still? How the Afghan Girl was Identified by Her Iris Patterns Read the story NASA Mars Rover images Answer
Oriented Filters for Object Recognition: an empirical study
 Oriented Filters for Object Recognition: an empirical study Jerry Jun Yokono Tomaso Poggio Center for Biological and Computational Learning, M.I.T. E5-0, 45 Carleton St., Cambridge, MA 04, USA Sony Corporation,
Oriented Filters for Object Recognition: an empirical study Jerry Jun Yokono Tomaso Poggio Center for Biological and Computational Learning, M.I.T. E5-0, 45 Carleton St., Cambridge, MA 04, USA Sony Corporation,