Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction
|
|
|
- Angelica Atkinson
- 5 years ago
- Views:
Transcription
1 Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction Marc Pollefeys Joined work with Nikolay Savinov, Christian Haene, Lubor Ladicky

2 2 Comparison to Volumetric Fusion
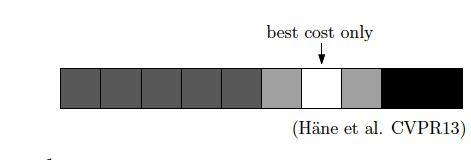
3 Higher-order ray potentials to model visibility Volumetric formulation (Savinov et al, CVPR15) Ray potentials Pairwise regularizer Cost based on the first occupied voxel along the ray freespace depth label
4 Higher-order ray potentials to model visibility Discrete formulation using QPBO relaxation (Savinov et al, CVPR15) x 0 x 1 x 2 x 3 x 4 x 5 x 6 x 0 x 1 x 2 x 3 x 4 x 5 x 6 Our goal is to find : such that is : 1) A pairwise function 2) Number of edges grows linearly with the length for a ray 3) Symmetric to inherit QPBO properties
5 Two-label problem (Savinov et al, CVPR15) To find we do these steps: 1) Polynomial representation of the ray potential 2) Transformation into submodular function over x and x 3) Pairwise construction using auxiliary variables z 4) Merging variables [Ramalingam12] for linear complexity 5) Symmetrization of the graph

6 Symmetric graph construction for higher-order ray potential (Savinov et al, CVPR15)
7 Multi-label problem (Savinov et al, CVPR15) Standard alpha-expansion Multi-label ray potential projects into 2-label ray potential expansion expansion expansion Variables not labelled by QPBO labelled using ICM
8 Implementation details (Savinov et al, CVPR15) Semantic cost Depth cost Semantic classifier [Ladický ICCV09] Multi-view stereo depth matches using zero-mean NCC For the top n matches : 0-1 Use [GoldbergAlgo11] for graphcut


9 Results inference generative 9 (Savinov et al, CVPR15)

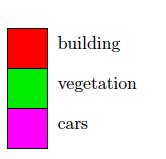
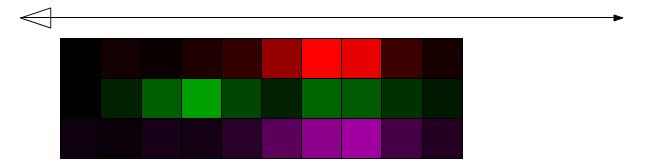
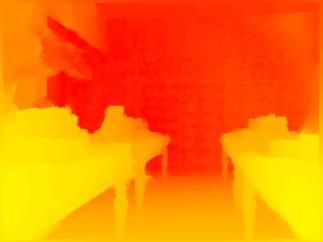
10 Results Input Depth Semantics 3D model (Savinov et al, CVPR15)

11 Results Input Depth Semantics 3D model (Savinov et al, CVPR15)
12 Results (Savinov et al, CVPR15)
13 13 Joint depth-semantic cost?

14
15 Single-View Depth using a Joint Depth-Semantic Classifier Marc Pollefeys Joint work with Ľubor Ladický and Jianbo Shi (Upenn)
16 Single-View Depth Estimation
17 Single-View Depth Estimation Standard approaches : 1. Model fitting [Barinova et al. ECCV08]
18 Single-View Depth Estimation Standard approaches : 1. Model fitting [Barinova et al. ECCV08] Requires strong prior knowledge Ignores small objects
19 Single-View Depth Estimation Standard approaches : 1. Model fitting [Barinova et al. ECCV08] 2. 3D-Detection based [Hoiem et al. CVPR06]

![Model fitting [Barinova et al. ECCV08] 2.](/docs-images/87/96523573/images/20-1.jpg "3D-Detection based [Hoiem et al.")
20 Single-View Depth Estimation Standard approaches : 1. Model fitting [Barinova et al. ECCV08] 2. 3D-Detection based [Hoiem et al. CVPR06] Works only for foreground objects (things)
21 Single-View Depth Estimation Standard approaches : 1. Model fitting [Barinova et al. ECCV08] 2. 3D-Detection based [Hoiem et al. CVPR06] 3. Depth from semantic labels [Liu et al. CVPR10]
![Single-View Depth Estimation Standard approaches : 1. Model fitting [Barinova et al. ECCV08] 2.](/docs-images/87/96523573/images/22-1.jpg "3D-Detection based [Hoiem et al. CVPR06] 3. Depth from semantic labels [Liu et al.")
22 Single-View Depth Estimation Standard approaches : 1. Model fitting [Barinova et al. ECCV08] 2. 3D-Detection based [Hoiem et al. CVPR06] 3. Depth from semantic labels [Liu et al. CVPR10] Requires strong priors for semantic classes
23 Single-View Depth Estimation Standard approaches : 1. Model fitting [Barinova et al. ECCV08] 2. 3D-Detection based [Hoiem et al. CVPR06] 3. Depth from semantic labels [Liu et al. CVPR10] 4. Data driven [Saxena et al. NIPS05]
![Single-View Depth Estimation Standard approaches : 1. Model fitting [Barinova et al. ECCV08] 2. 3D-Detection based [Hoiem et al. CVPR06] 3.](/docs-images/87/96523573/images/24-1.jpg "Depth from semantic labels [Liu et al. CVPR10] 4. Data driven [Saxena et al.")
24 Single-View Depth Estimation Standard approaches : 1. Model fitting [Barinova et al. ECCV08] 2. 3D-Detection based [Hoiem et al. CVPR06] 3. Depth from semantic labels [Liu et al. CVPR10] 4. Data driven [Saxena et al. NIPS05] Requires lots of data (depth does not generalizes across classes) A problem with balancing data
25 Data-driven Depth Estimation Impossible?









26 Data-driven Depth Estimation No common structure of the scene Ground plane not always visible Large variation of viewpoints and of objects in the scene Both things and stuff in the scene
27 Data-driven Depth Estimation Desired properties :

28 Data-driven Depth Estimation Desired properties : 1. Pixel-wise classifier Super-pixels not necessarily planar




29 Data-driven Depth Estimation Desired properties : 1. Pixel-wise classifier 2. Translation invariant Classifier response for x and at a depth d window w h around the point x I




30 Data-driven Depth Estimation Desired properties : 1. Pixel-wise classifier 2. Translation invariant 3. Depth transforms with inverse scaling
31 Data-driven Depth Estimation Desired properties : 1. Pixel-wise classifier 2. Translation invariant 3. Depth transforms with inverse scaling d C Sufficient to train a binary classifier predicting a single
32 Data-driven Depth Estimation Desired properties : 1. Pixel-wise classifier 2. Translation invariant 3. Depth transforms with inverse scaling d C Sufficient to train a binary classifier predicting a single For other depths d :






33 Data-driven Depth Estimation Desired properties : 1. Pixel-wise classifier 2. Translation invariant 3. Depth transforms with inverse scaling
34 Data-driven Depth Estimation Desired properties : 1. Pixel-wise classifier 2. Translation invariant 3. Depth transforms with inverse scaling Generalized to multiple semantic classes semantic label

35 1. Image pyramid is built Training the classifier
36 Training the classifier 1. Image pyramid is built 2. Training data randomly sampled

37 Training the classifier 1. Image pyramid is built 2. Training data randomly sampled 3. Samples of each class at d C used as positives
38 Training the classifier 1. Image pyramid is built 2. Training data randomly sampled 3. Samples of each class at d C used as positives 4. Samples of other classes or at d d C used as negatives

39 Training the classifier 1. Image pyramid is built 2. Training data randomly sampled 3. Samples of each class at d C used as positives 4. Samples of other classes or at d d C used as negatives 5. Multi-class classifier trained
40 Classifying the patch Dense Features SIFT, LBP, Self Similarity, Texton
41 Classifying the patch Dense Features SIFT, LBP, Self Similarity, Texton Representation rectangles Soft BOW representations in the set of random

42 Classifying the patch Dense Features SIFT, LBP, Self Similarity, Texton Representation rectangles Classifier Soft BOW representations in the set of random AdaBoost
43 Experiments KITTI dataset 30 training & 30 test images (1382 x 512) 12 semantic labels, depth 2-50m (except sky) ratio of neighbouring depths d i+1 / d i = 1.25 NYU2 dataset 725 training & 724 test images (640 x 480) 40 semantic labels, depth in the range 1-10 m ratio of neighbouring depths d i+1 / d i = 1.25

44 KITTI results

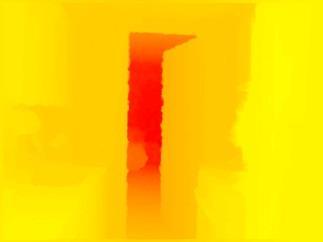
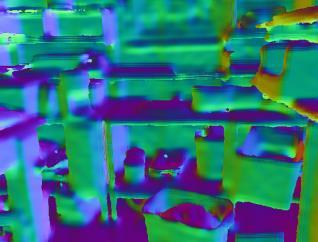
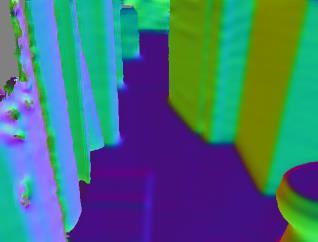
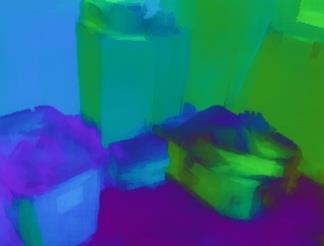
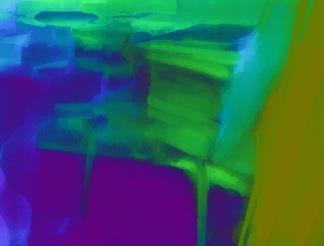
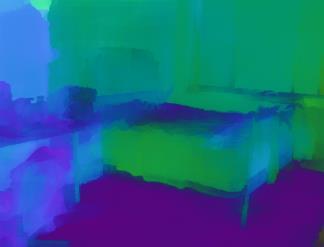
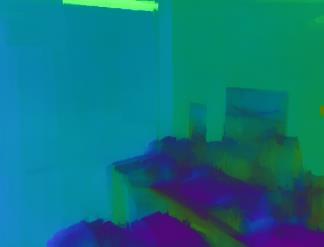
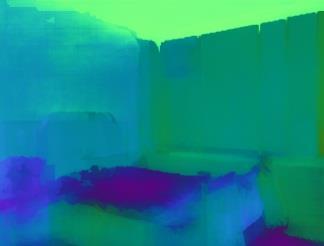
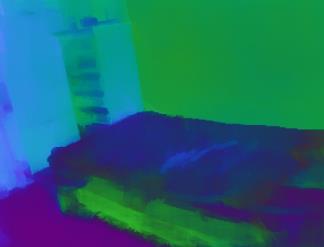
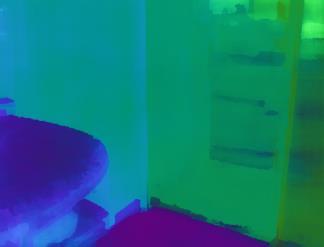
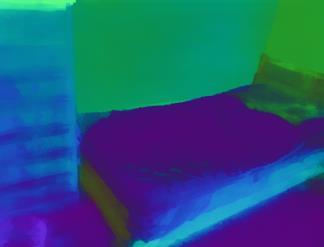
45 NYU2 results

46 NYU2 results
47 Quantitative results (semantic) Quantitative results on the KITTI dataset (recall) Quantitative results on the NYU2 dataset (frequency-weighted I / U)

48 Quantitative results (depth) The ratio of pixels below the relative error
49 Quantitative results (depth) The distribution of the relative errors of an estimated depth in the log 1.25 space
50 Single-View Depth: Conclusions Things and stuff have intrinsic visual scale Depth can be recovered from a single image Classification improves with scale normalized classifier Data does not need to be balanced over scale
51 Discriminatively Trained Dense Surface Normal Estimation Marc Pollefeys Joint work with Ľubor Ladický and Bernhard Zeisl
52 Surface Normal Estimation Not explored much in the literature so how to approach it?







53 Surface Normal Estimation Not explored much in the literature so how to approach it? Pixels or Super-pixels?
54 Pixel-based Classifiers Input image Feature representation Context-based (context pixels or rectangles) feature representations [Shotton06, Shotton08]

55 Pixel-based Classifiers Input image Feature representation Context-based (context pixels or rectangles) feature representations [Shotton06, Shotton08] Classifier typically noisy and does not follow object boundaries
56 Segment-based Classifiers Input image Feature representation Based on feature statistics in segments
57 Segment-based Classifiers Input image Feature representation Based on feature statistics in segments Segments expected to be label-consistent
58 Segment-based Classifiers Input image Feature representation Based on feature statistics in segments Segments expected to be label-consistent One particular segmentation has to be chosen
59 Joint Regularization Input image Independent classifiers Existing optimization methods (Ladicky09) designed for discrete labels
60 Joint Regularization Input image Independent classifiers Existing optimization methods (Ladicky09) designed for discrete labels Not obvious how to generalize for continuous problems
 designed for")

61 Joint Regularization Input image Independent classifiers Existing optimization methods (Ladicky09) designed for discrete labels Not obvious how to generalize for continuous problems Maybe we can directly learn joint classifier
62 Joint Learning Input image Segment representation How to convert segment representation into pixel representation?
63 Joint Learning Input image Segment representation How to convert segment representation into pixel representation? Representation of a pixel the same as of the segment it belongs to
64 Joint Learning Input image Segment representation How to convert segment representation into pixel representation? Representation of a pixel the same as of the segment it belongs to Equivalent to weighted segment based approach

65 Joint Learning How to convert segment representation into pixel representation? Representation of a pixel the same as of the segment it belongs to Equivalent to weighted segment based approach Concatenation to combine pixel and multiple segment representations
66 Joint Learning To simplify regression problem Normals clustered using K-means clustering Each represented as weighted sums of cluster centres using local coding

67 Joint Learning To simplify regression problem Normals clustered using K-means clustering Each represented as weighted sums of cluster centres using local coding Learning formulated as a regression into local coding coordinates

68 Pipeline of our Method
69 AdaBoost Regression Response for each cluster centre l
70 AdaBoost Regression Response for each cluster centre l Learning optimizes weighted expected loss
71 AdaBoost Regression Response for each cluster centre l Learning optimizes weighted expected loss Empirical risk minimization in each iteration
72 AdaBoost Regression Introducing two sets of weights the problem transforms into recursive problem:
73 AdaBoost Regression Introducing two sets of weights the problem transforms into recursive problem: Closed-form solution for parameters of the weak classifier (see the paper)
74 Test-time Evaluation The most probable triangle found by maximizing:
75 Test-time Evaluation The most probable triangle found by maximizing: The local coding coefficients found as an expected value of probabilistic interpretation:
76 Test-time Evaluation The most probable triangle found by maximizing: The local coding coefficients found as an expected value of probabilistic interpretation: Normal recovered by projecting weighted sum to the unit sphere









77 Results Input image err = Input image err = Input image err = Input image err = Input image err = Input image err = Input image err = Input image err = Input image err =







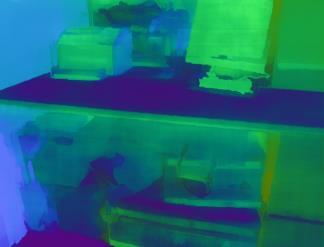
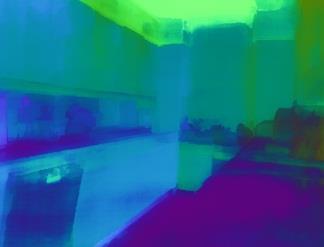
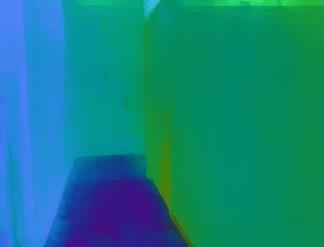







78 Results Input image err = Input image err = Input image err = Input image err = Input image err = Input image err = Input image err = Input image err = Input image err =
79 Normal segmentation: conclusions Normal estimation might not be as hard as it seems Proposed joint pixel & segment learning useful for other recognition tasks Results improvable by incorporating regularization (potentially joint with depth)
80 Conclusion Volumetric multi-view approach which performs joint reconstruction, recognition and segmentation Strong coupling between geometry and appearance via classdependent anisotropic smoothness term Clean energy formulation (with tight convex relaxation) Significant qualitative improvement with respect to state of the art (regularized solution make more sense) Semantic reconstruction is more useful
81 Challenges and future research Scale to many classes leverage sparsity of semantic interactions, class hierarchies Scale to large volumes adaptive space discretization and basis representation Dynamic scenes Spatio-temporal interactions, extensions to 4D volumes and Wulff shapes Exploration and robotics Enable real-time navigation and exploration Predict information gain of perception actions
82 Thank you for your attention! Questions?
Geometric and Semantic 3D Reconstruction: Part 4A: Volumetric Semantic 3D Reconstruction. CVPR 2017 Tutorial Christian Häne UC Berkeley
 Geometric and Semantic 3D Reconstruction: Part 4A: Volumetric Semantic 3D Reconstruction CVPR 2017 Tutorial Christian Häne UC Berkeley Dense Multi-View Reconstruction Goal: 3D Model from Images (Depth
Geometric and Semantic 3D Reconstruction: Part 4A: Volumetric Semantic 3D Reconstruction CVPR 2017 Tutorial Christian Häne UC Berkeley Dense Multi-View Reconstruction Goal: 3D Model from Images (Depth
Learning and Inferring Depth from Monocular Images. Jiyan Pan April 1, 2009
 Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
Analysis: TextonBoost and Semantic Texton Forests. Daniel Munoz Februrary 9, 2009
 Analysis: TextonBoost and Semantic Texton Forests Daniel Munoz 16-721 Februrary 9, 2009 Papers [shotton-eccv-06] J. Shotton, J. Winn, C. Rother, A. Criminisi, TextonBoost: Joint Appearance, Shape and Context
Analysis: TextonBoost and Semantic Texton Forests Daniel Munoz 16-721 Februrary 9, 2009 Papers [shotton-eccv-06] J. Shotton, J. Winn, C. Rother, A. Criminisi, TextonBoost: Joint Appearance, Shape and Context
CS381V Experiment Presentation. Chun-Chen Kuo
 CS381V Experiment Presentation Chun-Chen Kuo The Paper Indoor Segmentation and Support Inference from RGBD Images. N. Silberman, D. Hoiem, P. Kohli, and R. Fergus. ECCV 2012. 50 100 150 200 250 300 350
CS381V Experiment Presentation Chun-Chen Kuo The Paper Indoor Segmentation and Support Inference from RGBD Images. N. Silberman, D. Hoiem, P. Kohli, and R. Fergus. ECCV 2012. 50 100 150 200 250 300 350
Segmentation. Bottom up Segmentation Semantic Segmentation
 Segmentation Bottom up Segmentation Semantic Segmentation Semantic Labeling of Street Scenes Ground Truth Labels 11 classes, almost all occur simultaneously, large changes in viewpoint, scale sky, road,
Segmentation Bottom up Segmentation Semantic Segmentation Semantic Labeling of Street Scenes Ground Truth Labels 11 classes, almost all occur simultaneously, large changes in viewpoint, scale sky, road,
Data-driven Depth Inference from a Single Still Image
 Data-driven Depth Inference from a Single Still Image Kyunghee Kim Computer Science Department Stanford University kyunghee.kim@stanford.edu Abstract Given an indoor image, how to recover its depth information
Data-driven Depth Inference from a Single Still Image Kyunghee Kim Computer Science Department Stanford University kyunghee.kim@stanford.edu Abstract Given an indoor image, how to recover its depth information
A Patch Prior for Dense 3D Reconstruction in Man-Made Environments
 A Patch Prior for Dense 3D Reconstruction in Man-Made Environments Christian Häne 1, Christopher Zach 2, Bernhard Zeisl 1, Marc Pollefeys 1 1 ETH Zürich 2 MSR Cambridge October 14, 2012 A Patch Prior for
A Patch Prior for Dense 3D Reconstruction in Man-Made Environments Christian Häne 1, Christopher Zach 2, Bernhard Zeisl 1, Marc Pollefeys 1 1 ETH Zürich 2 MSR Cambridge October 14, 2012 A Patch Prior for
Estimating Human Pose in Images. Navraj Singh December 11, 2009
 Estimating Human Pose in Images Navraj Singh December 11, 2009 Introduction This project attempts to improve the performance of an existing method of estimating the pose of humans in still images. Tasks
Estimating Human Pose in Images Navraj Singh December 11, 2009 Introduction This project attempts to improve the performance of an existing method of estimating the pose of humans in still images. Tasks
Semantic 3D Reconstruction of Heads Supplementary Material
 Semantic 3D Reconstruction of Heads Supplementary Material Fabio Maninchedda1, Christian Ha ne2,?, Bastien Jacquet3,?, Amae l Delaunoy?, Marc Pollefeys1,4 1 ETH Zurich 2 UC Berkeley 3 Kitware SAS 4 Microsoft
Semantic 3D Reconstruction of Heads Supplementary Material Fabio Maninchedda1, Christian Ha ne2,?, Bastien Jacquet3,?, Amae l Delaunoy?, Marc Pollefeys1,4 1 ETH Zurich 2 UC Berkeley 3 Kitware SAS 4 Microsoft
Learning Semantic Environment Perception for Cognitive Robots
 Learning Semantic Environment Perception for Cognitive Robots Sven Behnke University of Bonn, Germany Computer Science Institute VI Autonomous Intelligent Systems Some of Our Cognitive Robots Equipped
Learning Semantic Environment Perception for Cognitive Robots Sven Behnke University of Bonn, Germany Computer Science Institute VI Autonomous Intelligent Systems Some of Our Cognitive Robots Equipped
Multi-View 3D Object Detection Network for Autonomous Driving
 Multi-View 3D Object Detection Network for Autonomous Driving Xiaozhi Chen, Huimin Ma, Ji Wan, Bo Li, Tian Xia CVPR 2017 (Spotlight) Presented By: Jason Ku Overview Motivation Dataset Network Architecture
Multi-View 3D Object Detection Network for Autonomous Driving Xiaozhi Chen, Huimin Ma, Ji Wan, Bo Li, Tian Xia CVPR 2017 (Spotlight) Presented By: Jason Ku Overview Motivation Dataset Network Architecture
Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction
 Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction Nikolay Savinov 1, L ubor Ladický 1, Christian Häne and Marc Pollefeys ETH Zürich, Switzerland nikolay.savinov,lubor.ladicky,christian.haene,marc.pollefeys}@inf.ethz.ch
Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction Nikolay Savinov 1, L ubor Ladický 1, Christian Häne and Marc Pollefeys ETH Zürich, Switzerland nikolay.savinov,lubor.ladicky,christian.haene,marc.pollefeys}@inf.ethz.ch
Automatic Photo Popup
 Automatic Photo Popup Derek Hoiem Alexei A. Efros Martial Hebert Carnegie Mellon University What Is Automatic Photo Popup Introduction Creating 3D models from images is a complex process Time-consuming
Automatic Photo Popup Derek Hoiem Alexei A. Efros Martial Hebert Carnegie Mellon University What Is Automatic Photo Popup Introduction Creating 3D models from images is a complex process Time-consuming
Layered Scene Decomposition via the Occlusion-CRF Supplementary material
 Layered Scene Decomposition via the Occlusion-CRF Supplementary material Chen Liu 1 Pushmeet Kohli 2 Yasutaka Furukawa 1 1 Washington University in St. Louis 2 Microsoft Research Redmond 1. Additional
Layered Scene Decomposition via the Occlusion-CRF Supplementary material Chen Liu 1 Pushmeet Kohli 2 Yasutaka Furukawa 1 1 Washington University in St. Louis 2 Microsoft Research Redmond 1. Additional
Multi-view stereo. Many slides adapted from S. Seitz
 Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
Predicting Depth, Surface Normals and Semantic Labels with a Common Multi-Scale Convolutional Architecture David Eigen, Rob Fergus
 Predicting Depth, Surface Normals and Semantic Labels with a Common Multi-Scale Convolutional Architecture David Eigen, Rob Fergus Presented by: Rex Ying and Charles Qi Input: A Single RGB Image Estimate
Predicting Depth, Surface Normals and Semantic Labels with a Common Multi-Scale Convolutional Architecture David Eigen, Rob Fergus Presented by: Rex Ying and Charles Qi Input: A Single RGB Image Estimate
Multi-view Stereo. Ivo Boyadzhiev CS7670: September 13, 2011
 Multi-view Stereo Ivo Boyadzhiev CS7670: September 13, 2011 What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape
Multi-view Stereo Ivo Boyadzhiev CS7670: September 13, 2011 What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape
Structured Models in. Dan Huttenlocher. June 2010
 Structured Models in Computer Vision i Dan Huttenlocher June 2010 Structured Models Problems where output variables are mutually dependent or constrained E.g., spatial or temporal relations Such dependencies
Structured Models in Computer Vision i Dan Huttenlocher June 2010 Structured Models Problems where output variables are mutually dependent or constrained E.g., spatial or temporal relations Such dependencies
Robotics Programming Laboratory
 Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Decomposing a Scene into Geometric and Semantically Consistent Regions
 Decomposing a Scene into Geometric and Semantically Consistent Regions Stephen Gould sgould@stanford.edu Richard Fulton rafulton@cs.stanford.edu Daphne Koller koller@cs.stanford.edu IEEE International
Decomposing a Scene into Geometric and Semantically Consistent Regions Stephen Gould sgould@stanford.edu Richard Fulton rafulton@cs.stanford.edu Daphne Koller koller@cs.stanford.edu IEEE International
String distance for automatic image classification
 String distance for automatic image classification Nguyen Hong Thinh*, Le Vu Ha*, Barat Cecile** and Ducottet Christophe** *University of Engineering and Technology, Vietnam National University of HaNoi,
String distance for automatic image classification Nguyen Hong Thinh*, Le Vu Ha*, Barat Cecile** and Ducottet Christophe** *University of Engineering and Technology, Vietnam National University of HaNoi,
CS395T paper review. Indoor Segmentation and Support Inference from RGBD Images. Chao Jia Sep
 CS395T paper review Indoor Segmentation and Support Inference from RGBD Images Chao Jia Sep 28 2012 Introduction What do we want -- Indoor scene parsing Segmentation and labeling Support relationships
CS395T paper review Indoor Segmentation and Support Inference from RGBD Images Chao Jia Sep 28 2012 Introduction What do we want -- Indoor scene parsing Segmentation and labeling Support relationships
Markov Networks in Computer Vision
 Markov Networks in Computer Vision Sargur Srihari srihari@cedar.buffalo.edu 1 Markov Networks for Computer Vision Some applications: 1. Image segmentation 2. Removal of blur/noise 3. Stereo reconstruction
Markov Networks in Computer Vision Sargur Srihari srihari@cedar.buffalo.edu 1 Markov Networks for Computer Vision Some applications: 1. Image segmentation 2. Removal of blur/noise 3. Stereo reconstruction
Markov Networks in Computer Vision. Sargur Srihari
 Markov Networks in Computer Vision Sargur srihari@cedar.buffalo.edu 1 Markov Networks for Computer Vision Important application area for MNs 1. Image segmentation 2. Removal of blur/noise 3. Stereo reconstruction
Markov Networks in Computer Vision Sargur srihari@cedar.buffalo.edu 1 Markov Networks for Computer Vision Important application area for MNs 1. Image segmentation 2. Removal of blur/noise 3. Stereo reconstruction
Direction Matters: Depth Estimation with a Surface Normal Classifier
 Direction Matters: Depth Estimation with a Surface Normal Classifier Christian Häne, L ubor Ladický, Marc Pollefeys Department of Computer Science ETH Zürich, Switzerland {christian.haene, lubor.ladicky,
Direction Matters: Depth Estimation with a Surface Normal Classifier Christian Häne, L ubor Ladický, Marc Pollefeys Department of Computer Science ETH Zürich, Switzerland {christian.haene, lubor.ladicky,
3D Photography: Stereo Matching
 3D Photography: Stereo Matching Kevin Köser, Marc Pollefeys Spring 2012 http://cvg.ethz.ch/teaching/2012spring/3dphoto/ Stereo & Multi-View Stereo Tsukuba dataset http://cat.middlebury.edu/stereo/ Stereo
3D Photography: Stereo Matching Kevin Köser, Marc Pollefeys Spring 2012 http://cvg.ethz.ch/teaching/2012spring/3dphoto/ Stereo & Multi-View Stereo Tsukuba dataset http://cat.middlebury.edu/stereo/ Stereo
08 An Introduction to Dense Continuous Robotic Mapping
 NAVARCH/EECS 568, ROB 530 - Winter 2018 08 An Introduction to Dense Continuous Robotic Mapping Maani Ghaffari March 14, 2018 Previously: Occupancy Grid Maps Pose SLAM graph and its associated dense occupancy
NAVARCH/EECS 568, ROB 530 - Winter 2018 08 An Introduction to Dense Continuous Robotic Mapping Maani Ghaffari March 14, 2018 Previously: Occupancy Grid Maps Pose SLAM graph and its associated dense occupancy
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Joint Inference in Image Databases via Dense Correspondence. Michael Rubinstein MIT CSAIL (while interning at Microsoft Research)
") Joint Inference in Image Databases via Dense Correspondence Michael Rubinstein MIT CSAIL (while interning at Microsoft Research) My work Throughout the year (and my PhD thesis): Temporal Video Analysis
Joint Inference in Image Databases via Dense Correspondence Michael Rubinstein MIT CSAIL (while interning at Microsoft Research) My work Throughout the year (and my PhD thesis): Temporal Video Analysis
Pulling Things out of Perspective
 Pulling Things out of Perspective L ubor Ladický ETH Zürich, Switzerland lubor.ladicky@inf.ethz.ch Jianbo Shi University of Pennsylvania, USA jshi@seas.upenn.edu Marc Pollefeys ETH Zürich, Switzerland
Pulling Things out of Perspective L ubor Ladický ETH Zürich, Switzerland lubor.ladicky@inf.ethz.ch Jianbo Shi University of Pennsylvania, USA jshi@seas.upenn.edu Marc Pollefeys ETH Zürich, Switzerland
IDE-3D: Predicting Indoor Depth Utilizing Geometric and Monocular Cues
 2016 International Conference on Computational Science and Computational Intelligence IDE-3D: Predicting Indoor Depth Utilizing Geometric and Monocular Cues Taylor Ripke Department of Computer Science
2016 International Conference on Computational Science and Computational Intelligence IDE-3D: Predicting Indoor Depth Utilizing Geometric and Monocular Cues Taylor Ripke Department of Computer Science
Can Similar Scenes help Surface Layout Estimation?
 Can Similar Scenes help Surface Layout Estimation? Santosh K. Divvala, Alexei A. Efros, Martial Hebert Robotics Institute, Carnegie Mellon University. {santosh,efros,hebert}@cs.cmu.edu Abstract We describe
Can Similar Scenes help Surface Layout Estimation? Santosh K. Divvala, Alexei A. Efros, Martial Hebert Robotics Institute, Carnegie Mellon University. {santosh,efros,hebert}@cs.cmu.edu Abstract We describe
Markov Random Fields and Segmentation with Graph Cuts
 Markov Random Fields and Segmentation with Graph Cuts Computer Vision Jia-Bin Huang, Virginia Tech Many slides from D. Hoiem Administrative stuffs Final project Proposal due Oct 27 (Thursday) HW 4 is out
Markov Random Fields and Segmentation with Graph Cuts Computer Vision Jia-Bin Huang, Virginia Tech Many slides from D. Hoiem Administrative stuffs Final project Proposal due Oct 27 (Thursday) HW 4 is out
CRF Based Point Cloud Segmentation Jonathan Nation
 CRF Based Point Cloud Segmentation Jonathan Nation jsnation@stanford.edu 1. INTRODUCTION The goal of the project is to use the recently proposed fully connected conditional random field (CRF) model to
CRF Based Point Cloud Segmentation Jonathan Nation jsnation@stanford.edu 1. INTRODUCTION The goal of the project is to use the recently proposed fully connected conditional random field (CRF) model to
Contexts and 3D Scenes
 Contexts and 3D Scenes Computer Vision Jia-Bin Huang, Virginia Tech Many slides from D. Hoiem Administrative stuffs Final project presentation Nov 30 th 3:30 PM 4:45 PM Grading Three senior graders (30%)
Contexts and 3D Scenes Computer Vision Jia-Bin Huang, Virginia Tech Many slides from D. Hoiem Administrative stuffs Final project presentation Nov 30 th 3:30 PM 4:45 PM Grading Three senior graders (30%)
Combining Appearance and Structure from Motion Features for Road Scene Understanding
 STURGESS et al.: COMBINING APPEARANCE AND SFM FEATURES 1 Combining Appearance and Structure from Motion Features for Road Scene Understanding Paul Sturgess paul.sturgess@brookes.ac.uk Karteek Alahari karteek.alahari@brookes.ac.uk
STURGESS et al.: COMBINING APPEARANCE AND SFM FEATURES 1 Combining Appearance and Structure from Motion Features for Road Scene Understanding Paul Sturgess paul.sturgess@brookes.ac.uk Karteek Alahari karteek.alahari@brookes.ac.uk
Discovering Visual Hierarchy through Unsupervised Learning Haider Razvi
 Discovering Visual Hierarchy through Unsupervised Learning Haider Razvi hrazvi@stanford.edu 1 Introduction: We present a method for discovering visual hierarchy in a set of images. Automatically grouping
Discovering Visual Hierarchy through Unsupervised Learning Haider Razvi hrazvi@stanford.edu 1 Introduction: We present a method for discovering visual hierarchy in a set of images. Automatically grouping
3D Scene Understanding by Voxel-CRF
 3D Scene Understanding by Voxel-CRF Byung-soo Kim University of Michigan bsookim@umich.edu Pushmeet Kohli Microsoft Research Cambridge pkohli@microsoft.com Silvio Savarese Stanford University ssilvio@stanford.edu
3D Scene Understanding by Voxel-CRF Byung-soo Kim University of Michigan bsookim@umich.edu Pushmeet Kohli Microsoft Research Cambridge pkohli@microsoft.com Silvio Savarese Stanford University ssilvio@stanford.edu
Single Image Depth Estimation via Deep Learning
 Single Image Depth Estimation via Deep Learning Wei Song Stanford University Stanford, CA Abstract The goal of the project is to apply direct supervised deep learning to the problem of monocular depth
Single Image Depth Estimation via Deep Learning Wei Song Stanford University Stanford, CA Abstract The goal of the project is to apply direct supervised deep learning to the problem of monocular depth
Part-Based Models for Object Class Recognition Part 3
 High Level Computer Vision! Part-Based Models for Object Class Recognition Part 3 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de! http://www.d2.mpi-inf.mpg.de/cv ! State-of-the-Art
High Level Computer Vision! Part-Based Models for Object Class Recognition Part 3 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de! http://www.d2.mpi-inf.mpg.de/cv ! State-of-the-Art
Contexts and 3D Scenes
 Contexts and 3D Scenes Computer Vision Jia-Bin Huang, Virginia Tech Many slides from D. Hoiem Administrative stuffs Final project presentation Dec 1 st 3:30 PM 4:45 PM Goodwin Hall Atrium Grading Three
Contexts and 3D Scenes Computer Vision Jia-Bin Huang, Virginia Tech Many slides from D. Hoiem Administrative stuffs Final project presentation Dec 1 st 3:30 PM 4:45 PM Goodwin Hall Atrium Grading Three
COMPUTER AND ROBOT VISION
 VOLUME COMPUTER AND ROBOT VISION Robert M. Haralick University of Washington Linda G. Shapiro University of Washington T V ADDISON-WESLEY PUBLISHING COMPANY Reading, Massachusetts Menlo Park, California
VOLUME COMPUTER AND ROBOT VISION Robert M. Haralick University of Washington Linda G. Shapiro University of Washington T V ADDISON-WESLEY PUBLISHING COMPANY Reading, Massachusetts Menlo Park, California
Large-Scale Point Cloud Classification Benchmark
 Large-Scale Point Cloud Classification Benchmark www.semantic3d.net IGP & CVG, ETH Zürich www.semantic3d.net, info@semantic3d.net 7/6/2016 1 Timo Hackel Nikolay Savinov Ľubor Ladický Jan Dirk Wegner Konrad
Large-Scale Point Cloud Classification Benchmark www.semantic3d.net IGP & CVG, ETH Zürich www.semantic3d.net, info@semantic3d.net 7/6/2016 1 Timo Hackel Nikolay Savinov Ľubor Ladický Jan Dirk Wegner Konrad
Semantic Classification of Boundaries from an RGBD Image
 MITSUBISHI ELECTRIC RESEARCH LABORATORIES http://www.merl.com Semantic Classification of Boundaries from an RGBD Image Soni, N.; Namboodiri, A.; Ramalingam, S.; Jawahar, C.V. TR2015-102 September 2015
MITSUBISHI ELECTRIC RESEARCH LABORATORIES http://www.merl.com Semantic Classification of Boundaries from an RGBD Image Soni, N.; Namboodiri, A.; Ramalingam, S.; Jawahar, C.V. TR2015-102 September 2015
Learning Articulated Skeletons From Motion
 Learning Articulated Skeletons From Motion Danny Tarlow University of Toronto, Machine Learning with David Ross and Richard Zemel (and Brendan Frey) August 6, 2007 Point Light Displays It's easy for humans
Learning Articulated Skeletons From Motion Danny Tarlow University of Toronto, Machine Learning with David Ross and Richard Zemel (and Brendan Frey) August 6, 2007 Point Light Displays It's easy for humans
Fast Edge Detection Using Structured Forests
 Fast Edge Detection Using Structured Forests Piotr Dollár, C. Lawrence Zitnick [1] Zhihao Li (zhihaol@andrew.cmu.edu) Computer Science Department Carnegie Mellon University Table of contents 1. Introduction
Fast Edge Detection Using Structured Forests Piotr Dollár, C. Lawrence Zitnick [1] Zhihao Li (zhihaol@andrew.cmu.edu) Computer Science Department Carnegie Mellon University Table of contents 1. Introduction
Volumetric stereo with silhouette and feature constraints
 Volumetric stereo with silhouette and feature constraints Jonathan Starck, Gregor Miller and Adrian Hilton Centre for Vision, Speech and Signal Processing, University of Surrey, Guildford, GU2 7XH, UK.
Volumetric stereo with silhouette and feature constraints Jonathan Starck, Gregor Miller and Adrian Hilton Centre for Vision, Speech and Signal Processing, University of Surrey, Guildford, GU2 7XH, UK.
Day 3 Lecture 1. Unsupervised Learning
 Day 3 Lecture 1 Unsupervised Learning Semi-supervised and transfer learning Myth: you can t do deep learning unless you have a million labelled examples for your problem. Reality You can learn useful representations
Day 3 Lecture 1 Unsupervised Learning Semi-supervised and transfer learning Myth: you can t do deep learning unless you have a million labelled examples for your problem. Reality You can learn useful representations
Geometry based Repetition Detection for Urban Scene
 Geometry based Repetition Detection for Urban Scene Changchang Wu University of Washington Jan Michael Frahm UNC Chapel Hill Marc Pollefeys ETH Zürich Related Work Sparse Feature Matching [Loy et al. 06,
Geometry based Repetition Detection for Urban Scene Changchang Wu University of Washington Jan Michael Frahm UNC Chapel Hill Marc Pollefeys ETH Zürich Related Work Sparse Feature Matching [Loy et al. 06,
Image Segmentation. Srikumar Ramalingam School of Computing University of Utah. Slides borrowed from Ross Whitaker
 Image Segmentation Srikumar Ramalingam School of Computing University of Utah Slides borrowed from Ross Whitaker Segmentation Semantic Segmentation Indoor layout estimation What is Segmentation? Partitioning
Image Segmentation Srikumar Ramalingam School of Computing University of Utah Slides borrowed from Ross Whitaker Segmentation Semantic Segmentation Indoor layout estimation What is Segmentation? Partitioning
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
Graph Cuts. Srikumar Ramalingam School of Computing University of Utah
 Graph Cuts Srikumar Ramalingam School o Computing University o Utah Outline Introduction Pseudo-Boolean Functions Submodularity Max-low / Min-cut Algorithm Alpha-Expansion Segmentation Problem [Boykov
Graph Cuts Srikumar Ramalingam School o Computing University o Utah Outline Introduction Pseudo-Boolean Functions Submodularity Max-low / Min-cut Algorithm Alpha-Expansion Segmentation Problem [Boykov
Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks
 Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks Si Chen The George Washington University sichen@gwmail.gwu.edu Meera Hahn Emory University mhahn7@emory.edu Mentor: Afshin
Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks Si Chen The George Washington University sichen@gwmail.gwu.edu Meera Hahn Emory University mhahn7@emory.edu Mentor: Afshin
Seeing the unseen. Data-driven 3D Understanding from Single Images. Hao Su
 Seeing the unseen Data-driven 3D Understanding from Single Images Hao Su Image world Shape world 3D perception from a single image Monocular vision a typical prey a typical predator Cited from https://en.wikipedia.org/wiki/binocular_vision
Seeing the unseen Data-driven 3D Understanding from Single Images Hao Su Image world Shape world 3D perception from a single image Monocular vision a typical prey a typical predator Cited from https://en.wikipedia.org/wiki/binocular_vision
Real-World Material Recognition for Scene Understanding
 Real-World Material Recognition for Scene Understanding Abstract Sam Corbett-Davies Department of Computer Science Stanford University scorbett@stanford.edu In this paper we address the problem of recognizing
Real-World Material Recognition for Scene Understanding Abstract Sam Corbett-Davies Department of Computer Science Stanford University scorbett@stanford.edu In this paper we address the problem of recognizing
Multiple Kernel Learning for Emotion Recognition in the Wild
 Multiple Kernel Learning for Emotion Recognition in the Wild Karan Sikka, Karmen Dykstra, Suchitra Sathyanarayana, Gwen Littlewort and Marian S. Bartlett Machine Perception Laboratory UCSD EmotiW Challenge,
Multiple Kernel Learning for Emotion Recognition in the Wild Karan Sikka, Karmen Dykstra, Suchitra Sathyanarayana, Gwen Littlewort and Marian S. Bartlett Machine Perception Laboratory UCSD EmotiW Challenge,
Graph Cuts. Srikumar Ramalingam School of Computing University of Utah
 Graph Cuts Srikumar Ramalingam School o Computing University o Utah Outline Introduction Pseudo-Boolean Functions Submodularity Max-low / Min-cut Algorithm Alpha-Expansion Segmentation Problem [Boykov
Graph Cuts Srikumar Ramalingam School o Computing University o Utah Outline Introduction Pseudo-Boolean Functions Submodularity Max-low / Min-cut Algorithm Alpha-Expansion Segmentation Problem [Boykov
Robot Learning. There are generally three types of robot learning: Learning from data. Learning by demonstration. Reinforcement learning
 Robot Learning 1 General Pipeline 1. Data acquisition (e.g., from 3D sensors) 2. Feature extraction and representation construction 3. Robot learning: e.g., classification (recognition) or clustering (knowledge
Robot Learning 1 General Pipeline 1. Data acquisition (e.g., from 3D sensors) 2. Feature extraction and representation construction 3. Robot learning: e.g., classification (recognition) or clustering (knowledge
Depth from Stereo. Dominic Cheng February 7, 2018
 Depth from Stereo Dominic Cheng February 7, 2018 Agenda 1. Introduction to stereo 2. Efficient Deep Learning for Stereo Matching (W. Luo, A. Schwing, and R. Urtasun. In CVPR 2016.) 3. Cascade Residual
Depth from Stereo Dominic Cheng February 7, 2018 Agenda 1. Introduction to stereo 2. Efficient Deep Learning for Stereo Matching (W. Luo, A. Schwing, and R. Urtasun. In CVPR 2016.) 3. Cascade Residual
Lecture 13 Segmentation and Scene Understanding Chris Choy, Ph.D. candidate Stanford Vision and Learning Lab (SVL)
") Lecture 13 Segmentation and Scene Understanding Chris Choy, Ph.D. candidate Stanford Vision and Learning Lab (SVL) http://chrischoy.org Stanford CS231A 1 Understanding a Scene Objects Chairs, Cups, Tables,
Lecture 13 Segmentation and Scene Understanding Chris Choy, Ph.D. candidate Stanford Vision and Learning Lab (SVL) http://chrischoy.org Stanford CS231A 1 Understanding a Scene Objects Chairs, Cups, Tables,
Object Localization, Segmentation, Classification, and Pose Estimation in 3D Images using Deep Learning
 Allan Zelener Dissertation Proposal December 12 th 2016 Object Localization, Segmentation, Classification, and Pose Estimation in 3D Images using Deep Learning Overview 1. Introduction to 3D Object Identification
Allan Zelener Dissertation Proposal December 12 th 2016 Object Localization, Segmentation, Classification, and Pose Estimation in 3D Images using Deep Learning Overview 1. Introduction to 3D Object Identification
Separating Objects and Clutter in Indoor Scenes
 Separating Objects and Clutter in Indoor Scenes Salman H. Khan School of Computer Science & Software Engineering, The University of Western Australia Co-authors: Xuming He, Mohammed Bennamoun, Ferdous
Separating Objects and Clutter in Indoor Scenes Salman H. Khan School of Computer Science & Software Engineering, The University of Western Australia Co-authors: Xuming He, Mohammed Bennamoun, Ferdous
Region-based Segmentation and Object Detection
 Region-based Segmentation and Object Detection Stephen Gould Tianshi Gao Daphne Koller Presented at NIPS 2009 Discussion and Slides by Eric Wang April 23, 2010 Outline Introduction Model Overview Model
Region-based Segmentation and Object Detection Stephen Gould Tianshi Gao Daphne Koller Presented at NIPS 2009 Discussion and Slides by Eric Wang April 23, 2010 Outline Introduction Model Overview Model
OCCLUSION BOUNDARIES ESTIMATION FROM A HIGH-RESOLUTION SAR IMAGE
 OCCLUSION BOUNDARIES ESTIMATION FROM A HIGH-RESOLUTION SAR IMAGE Wenju He, Marc Jäger, and Olaf Hellwich Berlin University of Technology FR3-1, Franklinstr. 28, 10587 Berlin, Germany {wenjuhe, jaeger,
OCCLUSION BOUNDARIES ESTIMATION FROM A HIGH-RESOLUTION SAR IMAGE Wenju He, Marc Jäger, and Olaf Hellwich Berlin University of Technology FR3-1, Franklinstr. 28, 10587 Berlin, Germany {wenjuhe, jaeger,
Learning to generate 3D shapes
 Learning to generate 3D shapes Subhransu Maji College of Information and Computer Sciences University of Massachusetts, Amherst http://people.cs.umass.edu/smaji August 10, 2018 @ Caltech Creating 3D shapes
Learning to generate 3D shapes Subhransu Maji College of Information and Computer Sciences University of Massachusetts, Amherst http://people.cs.umass.edu/smaji August 10, 2018 @ Caltech Creating 3D shapes
Superpixel Segmentation using Depth
 Superpixel Segmentation using Depth Information Superpixel Segmentation using Depth Information David Stutz June 25th, 2014 David Stutz June 25th, 2014 01 Introduction - Table of Contents 1 Introduction
Superpixel Segmentation using Depth Information Superpixel Segmentation using Depth Information David Stutz June 25th, 2014 David Stutz June 25th, 2014 01 Introduction - Table of Contents 1 Introduction
What have we leaned so far?
 What have we leaned so far? Camera structure Eye structure Project 1: High Dynamic Range Imaging What have we learned so far? Image Filtering Image Warping Camera Projection Model Project 2: Panoramic
What have we leaned so far? Camera structure Eye structure Project 1: High Dynamic Range Imaging What have we learned so far? Image Filtering Image Warping Camera Projection Model Project 2: Panoramic
4/13/ Introduction. 1. Introduction. 2. Formulation. 2. Formulation. 2. Formulation
 1. Introduction Motivation: Beijing Jiaotong University 1 Lotus Hill Research Institute University of California, Los Angeles 3 CO 3 for Ultra-fast and Accurate Interactive Image Segmentation This paper
1. Introduction Motivation: Beijing Jiaotong University 1 Lotus Hill Research Institute University of California, Los Angeles 3 CO 3 for Ultra-fast and Accurate Interactive Image Segmentation This paper
Topics to be Covered in the Rest of the Semester. CSci 4968 and 6270 Computational Vision Lecture 15 Overview of Remainder of the Semester
 Topics to be Covered in the Rest of the Semester CSci 4968 and 6270 Computational Vision Lecture 15 Overview of Remainder of the Semester Charles Stewart Department of Computer Science Rensselaer Polytechnic
Topics to be Covered in the Rest of the Semester CSci 4968 and 6270 Computational Vision Lecture 15 Overview of Remainder of the Semester Charles Stewart Department of Computer Science Rensselaer Polytechnic
Image Segmentation continued Graph Based Methods. Some slides: courtesy of O. Capms, Penn State, J.Ponce and D. Fortsyth, Computer Vision Book
 Image Segmentation continued Graph Based Methods Some slides: courtesy of O. Capms, Penn State, J.Ponce and D. Fortsyth, Computer Vision Book Previously Binary segmentation Segmentation by thresholding
Image Segmentation continued Graph Based Methods Some slides: courtesy of O. Capms, Penn State, J.Ponce and D. Fortsyth, Computer Vision Book Previously Binary segmentation Segmentation by thresholding
Incremental Learning of Object Detectors Using a Visual Shape Alphabet
 Incremental Learning of Object Detectors Using a Visual Shape Alphabet A. Opelt, A. Pinz & A. Zisserman CVPR 06 Presented by Medha Bhargava* * Several slides adapted from authors presentation, CVPR 06
Incremental Learning of Object Detectors Using a Visual Shape Alphabet A. Opelt, A. Pinz & A. Zisserman CVPR 06 Presented by Medha Bhargava* * Several slides adapted from authors presentation, CVPR 06
Support surfaces prediction for indoor scene understanding
 2013 IEEE International Conference on Computer Vision Support surfaces prediction for indoor scene understanding Anonymous ICCV submission Paper ID 1506 Abstract In this paper, we present an approach to
2013 IEEE International Conference on Computer Vision Support surfaces prediction for indoor scene understanding Anonymous ICCV submission Paper ID 1506 Abstract In this paper, we present an approach to
Geometric Reconstruction Dense reconstruction of scene geometry
 Lecture 5. Dense Reconstruction and Tracking with Real-Time Applications Part 2: Geometric Reconstruction Dr Richard Newcombe and Dr Steven Lovegrove Slide content developed from: [Newcombe, Dense Visual
Lecture 5. Dense Reconstruction and Tracking with Real-Time Applications Part 2: Geometric Reconstruction Dr Richard Newcombe and Dr Steven Lovegrove Slide content developed from: [Newcombe, Dense Visual
Contents I IMAGE FORMATION 1
 Contents I IMAGE FORMATION 1 1 Geometric Camera Models 3 1.1 Image Formation............................. 4 1.1.1 Pinhole Perspective....................... 4 1.1.2 Weak Perspective.........................
Contents I IMAGE FORMATION 1 1 Geometric Camera Models 3 1.1 Image Formation............................. 4 1.1.1 Pinhole Perspective....................... 4 1.1.2 Weak Perspective.........................
Optical flow and tracking
 EECS 442 Computer vision Optical flow and tracking Intro Optical flow and feature tracking Lucas-Kanade algorithm Motion segmentation Segments of this lectures are courtesy of Profs S. Lazebnik S. Seitz,
EECS 442 Computer vision Optical flow and tracking Intro Optical flow and feature tracking Lucas-Kanade algorithm Motion segmentation Segments of this lectures are courtesy of Profs S. Lazebnik S. Seitz,
Gesture Recognition: Hand Pose Estimation. Adrian Spurr Ubiquitous Computing Seminar FS
 Gesture Recognition: Hand Pose Estimation Adrian Spurr Ubiquitous Computing Seminar FS2014 27.05.2014 1 What is hand pose estimation? Input Computer-usable form 2 Augmented Reality Gaming Robot Control
Gesture Recognition: Hand Pose Estimation Adrian Spurr Ubiquitous Computing Seminar FS2014 27.05.2014 1 What is hand pose estimation? Input Computer-usable form 2 Augmented Reality Gaming Robot Control
Multiple View Geometry
 Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
The Kinect Sensor. Luís Carriço FCUL 2014/15
 Advanced Interaction Techniques The Kinect Sensor Luís Carriço FCUL 2014/15 Sources: MS Kinect for Xbox 360 John C. Tang. Using Kinect to explore NUI, Ms Research, From Stanford CS247 Shotton et al. Real-Time
Advanced Interaction Techniques The Kinect Sensor Luís Carriço FCUL 2014/15 Sources: MS Kinect for Xbox 360 John C. Tang. Using Kinect to explore NUI, Ms Research, From Stanford CS247 Shotton et al. Real-Time
Cluster Analysis. Angela Montanari and Laura Anderlucci
 Cluster Analysis Angela Montanari and Laura Anderlucci 1 Introduction Clustering a set of n objects into k groups is usually moved by the aim of identifying internally homogenous groups according to a
Cluster Analysis Angela Montanari and Laura Anderlucci 1 Introduction Clustering a set of n objects into k groups is usually moved by the aim of identifying internally homogenous groups according to a
3D Computer Vision. Dense 3D Reconstruction II. Prof. Didier Stricker. Christiano Gava
 3D Computer Vision Dense 3D Reconstruction II Prof. Didier Stricker Christiano Gava Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
3D Computer Vision Dense 3D Reconstruction II Prof. Didier Stricker Christiano Gava Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
Segmentation Based Stereo. Michael Bleyer LVA Stereo Vision
 Segmentation Based Stereo Michael Bleyer LVA Stereo Vision What happened last time? Once again, we have looked at our energy function: E ( D) = m( p, dp) + p I < p, q > We have investigated the matching
Segmentation Based Stereo Michael Bleyer LVA Stereo Vision What happened last time? Once again, we have looked at our energy function: E ( D) = m( p, dp) + p I < p, q > We have investigated the matching
LEARNING BOUNDARIES WITH COLOR AND DEPTH. Zhaoyin Jia, Andrew Gallagher, Tsuhan Chen
 LEARNING BOUNDARIES WITH COLOR AND DEPTH Zhaoyin Jia, Andrew Gallagher, Tsuhan Chen School of Electrical and Computer Engineering, Cornell University ABSTRACT To enable high-level understanding of a scene,
LEARNING BOUNDARIES WITH COLOR AND DEPTH Zhaoyin Jia, Andrew Gallagher, Tsuhan Chen School of Electrical and Computer Engineering, Cornell University ABSTRACT To enable high-level understanding of a scene,
Is 2D Information Enough For Viewpoint Estimation? Amir Ghodrati, Marco Pedersoli, Tinne Tuytelaars BMVC 2014
 Is 2D Information Enough For Viewpoint Estimation? Amir Ghodrati, Marco Pedersoli, Tinne Tuytelaars BMVC 2014 Problem Definition Viewpoint estimation: Given an image, predicting viewpoint for object of
Is 2D Information Enough For Viewpoint Estimation? Amir Ghodrati, Marco Pedersoli, Tinne Tuytelaars BMVC 2014 Problem Definition Viewpoint estimation: Given an image, predicting viewpoint for object of
CS 4495 Computer Vision Motion and Optic Flow
 CS 4495 Computer Vision Aaron Bobick School of Interactive Computing Administrivia PS4 is out, due Sunday Oct 27 th. All relevant lectures posted Details about Problem Set: You may *not* use built in Harris
CS 4495 Computer Vision Aaron Bobick School of Interactive Computing Administrivia PS4 is out, due Sunday Oct 27 th. All relevant lectures posted Details about Problem Set: You may *not* use built in Harris
Viewpoint Invariant Features from Single Images Using 3D Geometry
 Viewpoint Invariant Features from Single Images Using 3D Geometry Yanpeng Cao and John McDonald Department of Computer Science National University of Ireland, Maynooth, Ireland {y.cao,johnmcd}@cs.nuim.ie
Viewpoint Invariant Features from Single Images Using 3D Geometry Yanpeng Cao and John McDonald Department of Computer Science National University of Ireland, Maynooth, Ireland {y.cao,johnmcd}@cs.nuim.ie
Automatic Dense Semantic Mapping From Visual Street-level Imagery
 Automatic Dense Semantic Mapping From Visual Street-level Imagery Sunando Sengupta [1], Paul Sturgess [1], Lubor Ladicky [2], Phillip H.S. Torr [1] [1] Oxford Brookes University [2] Visual Geometry Group,
Automatic Dense Semantic Mapping From Visual Street-level Imagery Sunando Sengupta [1], Paul Sturgess [1], Lubor Ladicky [2], Phillip H.S. Torr [1] [1] Oxford Brookes University [2] Visual Geometry Group,
Deep learning for object detection. Slides from Svetlana Lazebnik and many others
 Deep learning for object detection Slides from Svetlana Lazebnik and many others Recent developments in object detection 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before deep
Deep learning for object detection Slides from Svetlana Lazebnik and many others Recent developments in object detection 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before deep
Development in Object Detection. Junyuan Lin May 4th
 Development in Object Detection Junyuan Lin May 4th Line of Research [1] N. Dalal and B. Triggs. Histograms of oriented gradients for human detection, CVPR 2005. HOG Feature template [2] P. Felzenszwalb,
Development in Object Detection Junyuan Lin May 4th Line of Research [1] N. Dalal and B. Triggs. Histograms of oriented gradients for human detection, CVPR 2005. HOG Feature template [2] P. Felzenszwalb,
Multiple cosegmentation
 Armand Joulin, Francis Bach and Jean Ponce. INRIA -Ecole Normale Supérieure April 25, 2012 Segmentation Introduction Segmentation Supervised and weakly-supervised segmentation Cosegmentation Segmentation
Armand Joulin, Francis Bach and Jean Ponce. INRIA -Ecole Normale Supérieure April 25, 2012 Segmentation Introduction Segmentation Supervised and weakly-supervised segmentation Cosegmentation Segmentation
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Regionlet Object Detector with Hand-crafted and CNN Feature
 Regionlet Object Detector with Hand-crafted and CNN Feature Xiaoyu Wang Research Xiaoyu Wang Research Ming Yang Horizon Robotics Shenghuo Zhu Alibaba Group Yuanqing Lin Baidu Overview of this section Regionlet
Regionlet Object Detector with Hand-crafted and CNN Feature Xiaoyu Wang Research Xiaoyu Wang Research Ming Yang Horizon Robotics Shenghuo Zhu Alibaba Group Yuanqing Lin Baidu Overview of this section Regionlet
Image Analysis Lecture Segmentation. Idar Dyrdal
 Image Analysis Lecture 9.1 - Segmentation Idar Dyrdal Segmentation Image segmentation is the process of partitioning a digital image into multiple parts The goal is to divide the image into meaningful
Image Analysis Lecture 9.1 - Segmentation Idar Dyrdal Segmentation Image segmentation is the process of partitioning a digital image into multiple parts The goal is to divide the image into meaningful
Image Processing, Analysis and Machine Vision
 Image Processing, Analysis and Machine Vision Milan Sonka PhD University of Iowa Iowa City, USA Vaclav Hlavac PhD Czech Technical University Prague, Czech Republic and Roger Boyle DPhil, MBCS, CEng University
Image Processing, Analysis and Machine Vision Milan Sonka PhD University of Iowa Iowa City, USA Vaclav Hlavac PhD Czech Technical University Prague, Czech Republic and Roger Boyle DPhil, MBCS, CEng University
Recognition of Animal Skin Texture Attributes in the Wild. Amey Dharwadker (aap2174) Kai Zhang (kz2213)
 Kai Zhang (kz2213)") Recognition of Animal Skin Texture Attributes in the Wild Amey Dharwadker (aap2174) Kai Zhang (kz2213) Motivation Patterns and textures are have an important role in object description and understanding
Recognition of Animal Skin Texture Attributes in the Wild Amey Dharwadker (aap2174) Kai Zhang (kz2213) Motivation Patterns and textures are have an important role in object description and understanding
Beyond Bags of Features
 : for Recognizing Natural Scene Categories Matching and Modeling Seminar Instructed by Prof. Haim J. Wolfson School of Computer Science Tel Aviv University December 9 th, 2015
: for Recognizing Natural Scene Categories Matching and Modeling Seminar Instructed by Prof. Haim J. Wolfson School of Computer Science Tel Aviv University December 9 th, 2015
Modeling 3D viewpoint for part-based object recognition of rigid objects
 Modeling 3D viewpoint for part-based object recognition of rigid objects Joshua Schwartz Department of Computer Science Cornell University jdvs@cs.cornell.edu Abstract Part-based object models based on
Modeling 3D viewpoint for part-based object recognition of rigid objects Joshua Schwartz Department of Computer Science Cornell University jdvs@cs.cornell.edu Abstract Part-based object models based on
Self Lane Assignment Using Smart Mobile Camera For Intelligent GPS Navigation and Traffic Interpretation
 For Intelligent GPS Navigation and Traffic Interpretation Tianshi Gao Stanford University tianshig@stanford.edu 1. Introduction Imagine that you are driving on the highway at 70 mph and trying to figure
For Intelligent GPS Navigation and Traffic Interpretation Tianshi Gao Stanford University tianshig@stanford.edu 1. Introduction Imagine that you are driving on the highway at 70 mph and trying to figure
Segmentation and Tracking of Partial Planar Templates
 Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Texton Clustering for Local Classification using Scene-Context Scale
 Texton Clustering for Local Classification using Scene-Context Scale Yousun Kang Tokyo Polytechnic University Atsugi, Kanakawa, Japan 243-0297 Email: yskang@cs.t-kougei.ac.jp Sugimoto Akihiro National
Texton Clustering for Local Classification using Scene-Context Scale Yousun Kang Tokyo Polytechnic University Atsugi, Kanakawa, Japan 243-0297 Email: yskang@cs.t-kougei.ac.jp Sugimoto Akihiro National
Feature Tracking and Optical Flow
 Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who 1 in turn adapted slides from Steve Seitz, Rick Szeliski,
Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who 1 in turn adapted slides from Steve Seitz, Rick Szeliski,