arxiv: v2 [cs.cv] 8 Aug 2017
|
|
|
- Harvey Griffin
- 6 years ago
- Views:
Transcription

![cv] 8 Aug 17 Abstract Non-maximum suppression is an integral part of the object detection pipeline. First, it sorts all detection boxes on the basis of their scores.](/docs-images/72/67875777/images/1-1.jpg "The detection box M with the maximum score is selected and all other detection boxes with a significant overlap (using a pre-defined threshold) with M are suppressed.")
1 Improving Object Detection With One Line of Code Navaneeth Bodla* Bharat Singh* Rama Chellappa Larry S. Davis Center For Automation Research, University of Maryland, College Park arxiv: v2 [cs.cv] 8 Aug 17 Abstract Non-maximum suppression is an integral part of the object detection pipeline. First, it sorts all detection boxes on the basis of their scores. The detection box M with the maximum score is selected and all other detection boxes with a significant overlap (using a pre-defined threshold) with M are suppressed. This process is recursively applied on the remaining boxes. As per the design of the algorithm, if an object lies within the predefined overlap threshold, it leads to a miss. To this end, we propose Soft-NMS, an algorithm which decays the detection scores of all other objects as a continuous function of their overlap with M. Hence, no object is eliminated in this process. Soft-NMS obtains consistent improvements for the coco-style map metric on standard datasets like PASCAL VOC 07 (1.7% for both R- FCN and Faster-RCNN) and MS-COCO (1.3% for R-FCN and 1.1% for Faster-RCNN) by just changing the NMS algorithm without any additional hyper-parameters. Using Deformable-RFCN, Soft-NMS improves state-of-the-art in object detection from 39.8% to 40.9% with a single model. Further, the computational complexity of Soft-NMS is the same as traditional NMS and hence it can be efficiently implemented. Since Soft-NMS does not require any extra training and is simple to implement, it can be easily integrated into any object detection pipeline. Code for Soft- NMS is publicly available on GitHub 2nJLNMu. 1. Introduction Object detection is a fundamental problem in computer vision in which an algorithm generates bounding boxes for specified object categories and assigns them classification scores. It has many practical applications in autonomous driving [6, 9], video/image indexing [28, 22], surveillance [2, 11] etc. Hence, any new component proposed for the object detection pipeline should not create a computational *The first two authors contributed equally to this paper. 0.0? 0.4? Figure 1. This image has two confident horse detections (shown in red and green) which have a score of 0.95 and 0.8 respectively. The green detection box has a significant overlap with the red one. Is it better to suppress the green box altogether and assign it a score of 0 or a slightly lower score of 0.4? bottleneck, otherwise it will be conveniently ignored in practical implementations. Moreover, if a complex module is introduced which requires re-training of models which leads to a little improvement in performance, it will also be ignored. However, if a simple module can improve performance without requiring any re-training of existing models, it would be widely adopted. To this end, we present a soft non-maximum suppression algorithm, as an alternative to the traditional NMS algorithm in the current object detection pipeline. Traditional object detection pipelines [4, 8] employ a multi-scale sliding window based approach which assigns foreground/background scores for each class on the basis of features computed in each window. However, neighboring windows often have correlated scores (which increases false positives), so non-maximum suppression is used as a post-processing step to obtain final detections. With the advent of deep learning, the sliding window approach was replaced with category independent region proposals generated using a convolutional neural network. In state-ofthe-art detectors, these proposals are input to a classification sub-network which assigns them class specific scores 1
2 Input : B = {b 1,..,b N }, S = {s 1,..,s N }, N t B is the list of initial detection boxes S contains corresponding detection scores N t is the NMS threshold begin D {} while B 6= empty do m argmax S M b m D D S M; B B M for b i in B do end end return D, S end if iou(m,b i ) N t then B B b i ; S S s i end s i s i f(iou(m,b i )) NMS Soft-NMS Algorithm 1: The pseudo code in red is replaced Figure 2. The pseudo code in red is replaced with the one in green in Soft-NMS. We propose to revise the detection scores by scaling them as a linear or Gaussian function of overlap. [16, 24]. Another parallel regression sub-network refines the position of these proposals. This refinement process improves localization for objects, but also leads to cluttered detections as multiple proposals often get regressed to the same region of interest (RoI). Hence, even in state-of-the-art detectors, non-maximum suppression is used to obtain the final set of detections as it significantly reduces the number of false positives. Non-maximum suppression starts with a list of detection boxes B with scores S. After selecting the detection with the maximum score M, it removes it from the set B and appends it to the set of final detections D. It also removes any box which has an overlap greater than a threshold N t with M in the set B. This process is repeated for remaining boxes B. A major issue with non-maximum suppression is that it sets the score for neighboring detections to zero. Thus, if an object was actually present in that overlap threshold, it would be missed and this would lead to a drop in average precision. However, if we lower the detection scores as a function of its overlap with M, it would still be in the ranked list, although with a lower confidence. We show an illustration of the problem in Fig 1. Using this intuition, we propose a single line modification to the traditional greedy NMS algorithm in which we decrease the detection scores as an increasing function of overlap instead of setting the score to zero as in NMS. Intuitively, if a bounding box has a very high overlap with M, it should be assigned a very low score, while if it has a low overlap, it can maintain its original detection score. This Soft-NMS algorithm is shown in Figure 2. Soft-NMS leads to noticeable improvements in average precision measured over multiple overlap thresholds for state-of-the-object detectors on standard datasets like PASCAL VOC and MS- COCO. Since Soft-NMS does not require any extra-training and is simple to implement, it can be easily integrated in the object detection pipeline. 2. Related Work NMS has been an integral part of many detection algorithms in computer vision for almost 50 years. It was first employed in edge detection techniques [25]. Subsequently, it has been applied to multiple tasks like feature point detection [19, 12, ], face detection [29] and object detection [4, 8, 10]. In edge detection, NMS performs edge thinning to remove spurious responses [25, 1, 31]. In feature point detectors [12], NMS is effective in performing local thresholding to obtain unique feature point detections. In face detection [29], NMS is performed by partitioning boundingboxes into disjoint subsets using an overlap criterion. The final detections are obtained by averaging the co-ordinates of the detection boxes in the set. For human detection, Dalal and Triggs [4] demonstrated that a greedy NMS algorithm, where a bounding box with the maximum detection score is selected and its neighboring boxes are suppressed using a pre-defined overlap threshold improves performance over the approach used for face detection [29]. Since then, greedy NMS has been the de-facto algorithm used in object detection [8, 10, 24, 16]. It is surprising that this component of the detection pipeline has remained untouched for more than a decade. Greedy NMS still obtains the best performance when average precision (AP) is used as an evaluation metric and is therefore employed in state-of-the-art detectors [24, 16]. A few learning-based methods have been proposed as an alternative to greedy NMS which obtain good performance for object class detection [5, 26, 21]. For example, [26] first computes overlap between each pair of detection boxes. It then performs affinity propagation clustering to select exemplars for each cluster which represent the final detection boxes. A multi-class version of this algorithm is proposed in [21]. However, object class detection is a different problem, where object instances of all classes are evaluated simultaneously per image. Hence, we need to select a threshold for all classes and generate a fixed set of boxes. Since different thresholds may be suitable for different applications, in generic object detection, average precision is computed using a ranked list of all object instances in a particular class. Therefore, greedy NMS performs favourably to these algo-



 solution was proposed which uses detection scores as a unary potential and overlap between detections")
![as a pairwise potential to obtain the optimal subset of detection boxes [27]. Like greedy NMS, QUBO also applies a hard threshold to suppress detection boxes, which is different from Soft-NMS.](/docs-images/72/67875777/images/3-4.jpg "In another learning-based framework for pedestrian detection, a determinantal point process was combined with individualness prediction scores to optimally select final detections [15].")
3 NMS Figure 3. In object detection, first category independent region proposals are generated. These region proposals are then assigned a score for each class label using a classification network and their positions are updated slightly using a regression network. Finally, non-maximum-suppression is applied to obtain detections. rithms on generic object detection metrics. In another line of work, for detecting salient objects, a proposal subset optimization algorithm was proposed [30] as an alternative to greedy NMS. It performs a MAP-based subset optimization to jointly optimize the number and locations of detection windows. In salient object detection, the algorithm is expected to only find salient objects and not all objects. So, this problem is also different from generic object detection and again greedy NMS performs favourably when performance on object detection metrics is measured. For special cases like pedestrian detection, a quadratic unconstrained binary optimization (QUBO) solution was proposed which uses detection scores as a unary potential and overlap between detections as a pairwise potential to obtain the optimal subset of detection boxes [27]. Like greedy NMS, QUBO also applies a hard threshold to suppress detection boxes, which is different from Soft-NMS. In another learning-based framework for pedestrian detection, a determinantal point process was combined with individualness prediction scores to optimally select final detections [15]. To the best of our knowledge, for generic object detection, greedy NMS is still the strongest baseline on challenging object detection datasets like PASCAL VOC and MS-COCO. 3. Background We briefly describe the object-detection pipeline used in state-of-the-art object detectors in this section. During inference, an object detection network performs a sequence of convolution operations on an image using a deep convolutional neural network (CNN). The network bifurcates into two branches at a layer L one branch generates region proposals while the other performs classification and regression by pooling convolutional features inside RoIs generated by the proposal network. The proposal network generates classification scores and regression offsets for anchor boxes of multiple scales and aspect ratios placed at each pixel in the convolutional feature map [24]. It then ranks these anchor boxes and selects the top K ( 6000) anchors to which the bounding box regression offsets are added to obtain image level co-ordinates for each anchor. Greedy non-maximum suppression is applied to top K anchors which eventually generates region proposals 1. The classification network generates classification and regression scores for each proposal generated by the proposal network. Since there is no constraint in the network which forces it to generate a unique RoI for an object, multiple proposals may correspond to the same object. Hence, other than the first correct bounding-box, all other boxes on the same object would generate false positives. To alleviate this problem, non-maximum-suppression is performed on detection boxes of each class independently, with a specified overlap threshold. Since the number of detections is typically small and can be further reduced by pruning detections which fall below a very small threshold, applying non-maximum suppression at this stage is not computationally expensive. We present an alternative approach to this non-maximum suppression algorithm in the object detection pipeline. An overview of the object detection pipeline is shown in Fig Soft-NMS Current detection evaluation criteria emphasise precise localization and measure average precision of detection boxes at multiple overlap thresholds (ranging from 0.5 to 0.95). Therefore, applying NMS with a low threshold like 0.3 could lead to a drop in average precision when the overlap criterion during evaluation for a true positive is 0.7 (we refer to the detection evaluation threshold as O t from here on). This is because, there could be a detection box b i which is very close to an object (within 0.7 overlap), but had a slightly lower score than M (M did not cover the object), thus b i gets suppressed by a low N t. The likelihood of such a case would increase as the overlap threshold criterion is increased. Therefore, suppressing all nearby detection boxes with a low N t would increase the miss-rate. Also, using a high N t like 0.7 would increase false positives when O t is lower and would hence drop precision averaged over multiple thresholds. The increase in false positives would be much higher than the increase in true positives for this case because the number of objects is typically 1 We do not replace this non-maximum suppression in the object detection pipeline.
4 much smaller than the number of RoIs generated by a detector. Therefore, using a high NMS threshold is also not optimal. To overcome these difficulties, we revisit the NMS algorithm in greater detail. The pruning step in the NMS algorithm can be written as a re-scoring function as follows, { s i, iou(m, b i ) < N t s i =, 0, iou(m, b i ) N t Hence, NMS sets a hard threshold while deciding what should be kept or removed from the neighborhood of M. Suppose, instead, we decay the classification score of a box b i which has a high overlap with M, rather than suppressing it altogether. If b i contains an object not covered by M, it won t lead to a miss at a lower detection threshold. However, if b i does not cover any other object (while M covers an object), and even after decaying its score it ranks above true detections, it would still generate a false positive. Therefore, NMS should take the following conditions into account, Score of neighboring detections should be decreased to an extent that they have a smaller likelihood of increasing the false positive rate, while being above obvious false positives in the ranked list of detections. Removing neighboring detections altogether with a low NMS threshold would be sub-optimal and would increase the miss-rate when evaluation is performed at high overlap thresholds. Average precision measured over a range of overlap thresholds would drop when a high NMS threshold is used. We evaluate these conditions through experiments in Section 6.3. Rescoring Functions for Soft-NMS: Decaying the scores of other detection boxes which have an overlap with M seems to be a promising approach for improving NMS. It is also clear that scores for detection boxes which have a higher overlap with M should be decayed more, as they have a higher likelihood of being false positives. Hence, we propose to update the pruning step with the following rule, s i = { s i, iou(m, b i ) < N t, s i (1 iou(m, b i )), iou(m, b i ) N t The above function would decay the scores of detections above a threshold N t as a linear function of overlap with M. Hence, detection boxes which are far away from M would not be affected and those which are very close would be assigned a greater penalty. However, it is not continuous in terms of overlap and a sudden penalty is applied when a NMS threshold of N t is reached. It would be ideal if the penalty function was continuous, otherwise it could lead to abrupt changes to the ranked list of detections. A continuous penalty function should have no penalty when there is no overlap and very high penalty at a high overlap. Also, when the overlap is low, it should increase the penalty gradually, as M should not affect the scores of boxes which have a very low overlap with it. However, when overlap of a box b i with M becomes close to one, b i should be significantly penalized. Taking this into consideration, we propose to update the pruning step with a Gaussian penalty function as follows, s i = s i e iou(m,b i ) 2 σ, b i / D This update rule is applied in each iteration and scores of all remaining detection boxes are updated. The Soft-NMS algorithm is formally described in Figure 2, where f(iou(m, b i ))) is the overlap based weighting function. The computational complexity of each step in Soft-NMS is O(N), where N is the number of detection boxes. This is because scores for all detection boxes which have an overlap with M are updated. So, for N detection boxes, the computational complexity for Soft-NMS is O(N 2 ), which is the same as traditional greedy-nms. Since NMS is not applied on all detection boxes (boxes with a minimum threshold are pruned in each iteration), this step is not computationally expensive and hence does not affect the running time of current detectors. Note that Soft-NMS is also a greedy algorithm and does not find the globally optimal re-scoring of detection boxes. Re-scoring of detection boxes is performed in a greedy fashion and hence those detections which have a high local score are not suppressed. However, Soft-NMS is a generalized version of non-maximum suppression and traditional NMS is a special case of it with a discontinuous binary weighting function. Apart from the two proposed functions, other functions with more parameters can also be explored with Soft-NMS which take overlap and detection scores into account. For example, instances of the generalized logistic function like the Gompertz function can be used, but such functions would increase the number of hyper-parameters. 5. Datasets and Evaluation We perform experiments on two datasets, PASCAL VOC [7] and MS-COCO [17]. The Pascal dataset has object categories, while the MS-COCO dataset has 80 object categories. We choose the VOC 07 test partition to measure performance. For the MS-COCO dataset, sensitivity analysis is conducted on a publicly available minival set of 5,000 images. We also show results on the test-dev partition on
5 Method Training data Testing data AP 0.5: AP small AP medium AP large R-FCN [16] train+val35k test-dev R-FCN + S-NMS G train+val35k test-dev R-FCN + S-NMS L train+val35k test-dev F-RCNN [24] train+val35k test-dev F-RCNN + S-NMS G train+val35k test-dev F-RCNN + S-NMS L train+val35k test-dev D-RFCN [3] trainval test-dev D-RFCN S-NMS G trainval test-dev D-RFCN + MST trainval test-dev D-RFCN + MST + S-NMS G trainval test-dev Table 1. Results on MS-COCO test-dev set for R-FCN, D-RFCN and Faster-RCNN (F-RCNN) which use NMS as baseline and our proposed Soft-NMS method. G denotes Gaussian weighting and L denotes linear weighting. MST denotes multi-scale testing. Method AP AP@0.5 areo bike bird boat bottle bus car cat chair cow table dog horse mbike person plant sheep sofa train tv [24]+NMS [24]+S-NMS G [24]+S-NMS L [16]+NMS [16]+S-NMS G [16]+S-NMS L Table 2. Results on Pascal VOC 07 test set for off-the-shelf standard object detectors which use NMS as baseline and our proposed Soft-NMS method. Note that COCO-style evaluation is used. the MS-COCO dataset which consists of,288 images. To evaluate our method, we experimented with three state-of-the-art detectors, namely, Faster-RCNN [24], R- FCN [16] and Deformable-RFCN. For the PASCAL dataset, we selected publicly available pre-trained models provided by the authors. The Faster-RCNN detector was trained on VOC 07 train set while the R-FCN detector was trained on VOC 07 and 12. For MS- COCO also, we use the publicly available model for Faster- RCNN. However, since there was no publicly available model trained on MS-COCO for R-FCN, we trained our own model in Caffe [14] starting from a ResNet-101 CNN architecture [13]. Simple modifications like 5 scales for RPN anchors, a minimum image size of 800, 16 images per minibatch and 256 ROIs per image were used. Training was done on 8 GPUs in parallel. Note that our implementation obtains 1.9% better accuracy than that reported in [16] without using multi-scale training or testing. Hence, this is a strong baseline for R-FCN on MS-COCO. Both these detectors use a default NMS threshold of 0.3. In the sensitivity analysis section, we also vary this parameter and show results. We also trained deformable R-FCN with the same settings. At a threshold of 10e-4, using 4 CPU threads, it takes 0.01s per image for 80 classes. After each iteration, detections which fall below the threshold are discarded. This reduces computation time. At 10e-2, run time is seconds on a single core. We set maximum detections per image to 400 on MS-COCO and the evaluation server selects the top 100 detections per class for generating metrics (we confirmed that the coco evaluation server was not selecting top 100 scoring detections per image till June 17). Setting maximum detections to 100 reduces coco-style AP by Experiments In this section, we show comparative results and perform sensitivity analysis to show robustness of Soft-NMS compared to traditional NMS. We also conduct specific experiments to understand why and where does Soft-NMS perform better compared to traditional NMS Results In Table 1 we compare R-FCN and Faster-RCNN with traditional non-maximum suppression and Soft-NMS on MS-COCO. We set N t to 0.3 when using the linear weighting function and σ to 0.5 with the Gaussian weighting function. It is clear that Soft-NMS (using both Gaussian and linear weighting function) improves performance in all cases, especially when AP is computed at multiple overlap thresholds and averaged. For example, we obtain an improvement of 1.3% and 1.1% respectively for R-FCN and Faster-RCNN, which is significant for the MS-COCO dataset. Note that we obtain this improvement by just changing the NMS algorithm and hence it can be applied easily on multiple detectors with minimal changes. We perform the same experiments on the PASCAL VOC 07 test set, shown in Table 1. We also report average precision averaged over multiple overlap thresholds like MS-COCO. Even on PASCAL VOC 07, Soft-NMS obtains an improvement of 1.7% for both Faster-RCNN and R-FCN. For detectors like SSD [18] and YOLOv2 [23] which are not proposal based, with the linear function, Soft-NMS only obtains an improvement of 0.5%. This is because proposal
6 N t σ Table 3. Sensitivity Analysis across multiple overlap thresholds N t and parameters σ for NMS and Soft-NMS using R-FCN on coco minival. Best performance at each O t is marked in bold for each method. AP [05:0.95] Sensitivity to hyper parameter N t or σ R-FCN σ Faster-RCNN σ R-FCN N t Faster-RCNN N t Figure 4. R-FCN Sensitivity to hyper parameters σ (Soft-NMS) and N t (NMS) based detectors have higher recall and hence Soft-NMS has more potential to improve recall at higher O t. From here on, in all experiments, when we refer to Soft- NMS, it uses the Gaussian weighting function. In Fig 6, we also show per-class improvement on MS-COCO. It is interesting to observe that Soft-NMS when applied on R- FCN improves maximum performance for animals which are found in a herd like zebra, giraffe, sheep, elephant, horse by 3-6%, while there is little gain for objects like toaster, sports ball, hair drier which are less likely to co-occur in the same image Sensitivity Analysis Soft-NMS has a σ parameter and traditional NMS has an overlap threshold parameter N t. We vary these parameters and measure average precision on the minival set of MS-COCO set for each detector, see Fig 4. Note that AP is stable between 0.3 to 0.6 and drops significantly outside this range for both detectors. The variation in AP in this range is around 0.25% for traditional NMS. Soft-NMS obtains better performance than NMS from a range between 0.1 to 0.7. Its performance is stable from 0.4 to 0.7 and better by 1% for each detector even on the best NMS threshold selected by us on the coco-minival set. In all our experiments, we set σ to 0.5, even though a σ value of 0.6 seems to give better performance on the coco minival set. This is because we conducted the sensitivity analysis experiments later on and a difference of 0.1% was not significant When does Soft-NMS work better? Localization Performance Average precision alone does not explain us clearly when Soft-NMS obtains significant gains in performance. Hence, we present average precision of NMS and Soft-NMS when measured at different overlap thresholds. We also vary the NMS and Soft- NMS hyper-parameters to understand the characteristics of both these algorithms. From Table 3, we can infer that average precision decreases as NMS threshold is increased. Although it is the case that for a large O t, a high N t obtains slightly better performance compared to a lower N t AP does not drop significantly when a lower N t is used. On the other hand, using a high N t leads to significant drop in AP at lower O t and hence when AP is averaged at multiple thresholds, we observe a performance drop. Therefore, a better performance using a higher N t does not generalize to lower values of O t for traditional NMS. However, when we vary σ for Soft-NMS, we observe a different characteristic. Table 3 shows that even when we obtain better performance at higher O t, performance at lower O t does not drop. Further, we observe that Soft-NMS performs significantly better ( 2%) than traditional NMS irrespective of the value of the selected N t at higher O t. Also, the best AP for any hyper-parameter (N t or σ) for a selected O t is always better for Soft-NMS. This comparison makes it very clear that across all parameter settings, the best σ parameter for Soft-NMS performs better than a hard threshold N t selected in traditional NMS. Further, when performance across all thresholds is averaged, since a single parameter setting in Soft-NMS works well at multiple values of O t, overall performance gain is amplified. As expected, low values of σ perform better at lower O t and higher values of sigma perform better at higher O t. Unlike NMS, where higher values of N t lead to very little improvement in AP, higher values of σ lead to significant improvement in AP at a higher O t. Therefore, a larger σ can be used
7 Precision Precision vs Recall at O t = NMS Soft-NMS Recall Precision Precision vs Recall at O t = NMS Soft-NMS Recall Precision Precision vs Recall at O t = NMS Soft-NMS Recall Figure 5. R-FCN : Precision vs Recall at multiple overlap thresholds O t to improve performance of the detector for better localization which is not the case with NMS, as a larger N t obtains very little improvement. Precision vs Recall Finally, we would like to also know at what recall values is Soft-NMS performing better than NMS at different O t. Note that we re-score the detection scores and assign them lower scores, so we do not expect precision to improve at a lower recall. However, as O t and recall is increased, Soft-NMS obtains significant gains in precision. This is because, traditional NMS assigns a zero score to all boxes which have an overlap greater than N t with M. Hence, many boxes are missed and therefore precision does not increase at higher values of recall. Soft- NMS re-scores neighboring boxes instead of suppressing them altogether which leads to improvement in precision at higher values of recall. Also, Soft-NMS obtains significant improvement even for lower values of recall at higher values of O t because near misses are more likely to happen in this setting Qualitative Results We show a few qualitative results in Fig 7 using a detection threshold of 0.45 for images from the COCO-validation set. The R-FCN detector was used to generate detections. It is interesting to observe that Soft-NMS helps in cases when bad detections (false positives) have a small overlap with a good detection (true positive) and also when they have a low overlap with a good detection. For example, in the street image (No.8), a large wide bounding box spanning multiple people is suppressed because it had a small overlap with multiple detection boxes with a higher score than it. Hence, its score was reduced multiple times because of which it was suppressed. We observe a similar behaviour in image No.9. In the beach image (No.1), the score for the larger bounding box near the woman s handbag is suppressed below We also see that a false positive near the bowl in the kitchen image (No.4) is suppressed. In other cases, like for zebra, horse and giraffe images (images 2,5,7 and 13), the detection boxes get suppressed with NMS while Soft- NMS assigns a slightly lower score for neighboring boxes zebra giraffe elephant sheep horse motorcycle toilet person tennis racket bicycle umbrella suitcase bed cow dog teddy bear cat baseball bat broccoli train airplane wine glass pizza couch skateboard car carrot banana stop sign bear keyboard refrigerator surfboard sandwich laptop sink donut tie kite orange clock fork chair bird bus boat apple remote oven toothbrush fire hydrant skis bottle hot dog dining table microwave book truck traffic light parking meter bowl cake potted plant tv backpack cup spoon mouse bench handbag snowboard knife cell phone scissors frisbee baseball glove vase sports ball hair drier toaster zebra giraffe toilet cat elephant cow motorcycle person tennis racket broccoli suitcase horse sheep bed teddy bear train bear bicycle umbrella pizza clock keyboard car dog snowboard banana sink couch baseball bat airplane skateboard surfboard carrot hot dog wine glass sandwich oven refrigerator truck bird parking meter mouse fork potted plant bus donut laptop boat kite fire hydrant chair traffic light skis frisbee microwave bench tie dining table remote bottle cup orange toothbrush book stop sign baseball glove bowl tv cell phone vase scissors backpack apple sports ball knife toaster cake spoon handbag hair drier Figure 6. Per class improvement in AP for MS-COCO using Soft- NMS for R-FCN is shown in the left and for Faster-RCNN is shown on the right. Green bars indicate improvements beyond 3 %




![[1] J. Canny.](/docs-images/72/67875777/images/8-4.jpg "A computational")
























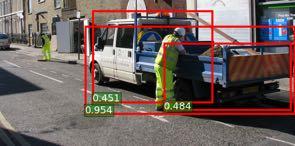

8 because of which we are able to detect true positives above a detection threshold of References [1] J. Canny. A computational approach to edge detection. IEEE Transactions on pattern analysis and machine intelligence, (6): , [2] R. T. Collins, A. J. Lipton, T. Kanade, H. Fujiyoshi, D. Duggins, Y. Tsin, D. Tolliver, N. Enomoto, O. Hasegawa, P. Burt, Figure 7. Qualitative results: Image pairs are shown in which the left image with blue bounding boxes is for traditional NMS, while the right image with red bounding boxes is for Soft-NMS. Examples above the blue line are successful cases and below are failure cases. Even in failure cases, Soft-NMS assigns a significantly lower score than the bounding box with a higher score. Note that for image No. 14, the classes in consideration are for person and not dog, similarly in 15 it is bench and in 21 it is potted plant.
9 et al. A system for video surveillance and monitoring [3] J. Dai, H. Qi, Y. Xiong, Y. Li, G. Zhang, H. Hu, and Y. Wei. Deformable convolutional networks. arxiv preprint arxiv: , [4] N. Dalal and B. Triggs. Histograms of oriented gradients for human detection. In Computer Vision and Pattern Recognition, 05. CVPR 05. IEEE Computer Society Conference on, volume 1, pages IEEE, 05. 1, 2 [5] C. Desai, D. Ramanan, and C. C. Fowlkes. Discriminative models for multi-class object layout. International journal of computer vision, 95(1):1 12, [6] P. Dollár, C. Wojek, B. Schiele, and P. Perona. Pedestrian detection: A benchmark. In Computer Vision and Pattern Recognition, 09. CVPR 09. IEEE Conference on, pages IEEE, [7] M. Everingham, L. Van Gool, C. K. Williams, J. Winn, and A. Zisserman. The pascal visual object classes (voc) challenge. International journal of computer vision, 88(2): , [8] P. F. Felzenszwalb, R. B. Girshick, D. McAllester, and D. Ramanan. Object detection with discriminatively trained partbased models. IEEE transactions on pattern analysis and machine intelligence, 32(9): , 10. 1, 2 [9] A. Geiger, P. Lenz, C. Stiller, and R. Urtasun. Vision meets robotics: The kitti dataset. The International Journal of Robotics Research, 32(11): , [10] R. Girshick, J. Donahue, T. Darrell, and J. Malik. Rich feature hierarchies for accurate object detection and semantic segmentation. In Proceedings of the IEEE conference on computer vision and pattern recognition, pages , [11] I. Haritaoglu, D. Harwood, and L. S. Davis. W/sup 4: real-time surveillance of people and their activities. IEEE Transactions on pattern analysis and machine intelligence, 22(8): , [12] C. Harris and M. Stephens. A combined corner and edge detector. In Alvey vision conference, volume 15, pages Citeseer, [13] K. He, X. Zhang, S. Ren, and J. Sun. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, pages , [14] Y. Jia, E. Shelhamer, J. Donahue, S. Karayev, J. Long, R. Girshick, S. Guadarrama, and T. Darrell. Caffe: Convolutional architecture for fast feature embedding. In Proceedings of the 22nd ACM international conference on Multimedia, pages ACM, [15] D. Lee, G. Cha, M.-H. Yang, and S. Oh. Individualness and determinantal point processes for pedestrian detection. In European Conference on Computer Vision, pages Springer, [16] Y. Li, K. He, J. Sun, et al. R-fcn: Object detection via regionbased fully convolutional networks. In Advances in Neural Information Processing Systems, pages , 16. 2, 5 [17] T.-Y. Lin, M. Maire, S. Belongie, J. Hays, P. Perona, D. Ramanan, P. Dollár, and C. L. Zitnick. Microsoft coco: Common objects in context. In European Conference on Computer Vision, pages Springer, [18] W. Liu, D. Anguelov, D. Erhan, C. Szegedy, S. Reed, C.- Y. Fu, and A. C. Berg. Ssd: Single shot multibox detector. In European Conference on Computer Vision, pages Springer, [19] D. G. Lowe. Distinctive image features from scaleinvariant keypoints. International journal of computer vision, 60(2):91 110, [] K. Mikolajczyk and C. Schmid. Scale & affine invariant interest point detectors. International journal of computer vision, 60(1):63 86, [21] D. Mrowca, M. Rohrbach, J. Hoffman, R. Hu, K. Saenko, and T. Darrell. Spatial semantic regularisation for large scale object detection. In Proceedings of the IEEE international conference on computer vision, pages 03 11, [22] J. Philbin, O. Chum, M. Isard, J. Sivic, and A. Zisserman. Object retrieval with large vocabularies and fast spatial matching. In Computer Vision and Pattern Recognition, 07. CVPR 07. IEEE Conference on, pages 1 8. IEEE, [23] J. Redmon, S. Divvala, R. Girshick, and A. Farhadi. You only look once: Unified, real-time object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, pages , [24] S. Ren, K. He, R. Girshick, and J. Sun. Faster r-cnn: Towards real-time object detection with region proposal networks. In Advances in neural information processing systems, pages 91 99, 15. 2, 3, 5 [25] A. Rosenfeld and M. Thurston. Edge and curve detection for visual scene analysis. IEEE Transactions on computers, 100(5): , [26] R. Rothe, M. Guillaumin, and L. Van Gool. Non-maximum suppression for object detection by passing messages between windows. In Asian Conference on Computer Vision, pages Springer, [27] S. Rujikietgumjorn and R. T. Collins. Optimized pedestrian detection for multiple and occluded people. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, pages , [28] J. Sivic, A. Zisserman, et al. Video google: A text retrieval approach to object matching in videos. In iccv, volume 2, pages , [29] P. Viola and M. Jones. Rapid object detection using a boosted cascade of simple features. In Computer Vision and Pattern Recognition, 01. CVPR 01. Proceedings of the 01 IEEE Computer Society Conference on, volume 1, pages I I. IEEE, [30] J. Zhang, S. Sclaroff, Z. Lin, X. Shen, B. Price, and R. Mech. Unconstrained salient object detection via proposal subset optimization. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, pages , [31] C. L. Zitnick and P. Dollár. Edge boxes: Locating object proposals from edges. In European Conference on Computer Vision, pages Springer, 14. 2
REGION AVERAGE POOLING FOR CONTEXT-AWARE OBJECT DETECTION
 REGION AVERAGE POOLING FOR CONTEXT-AWARE OBJECT DETECTION Kingsley Kuan 1, Gaurav Manek 1, Jie Lin 1, Yuan Fang 1, Vijay Chandrasekhar 1,2 Institute for Infocomm Research, A*STAR, Singapore 1 Nanyang Technological
REGION AVERAGE POOLING FOR CONTEXT-AWARE OBJECT DETECTION Kingsley Kuan 1, Gaurav Manek 1, Jie Lin 1, Yuan Fang 1, Vijay Chandrasekhar 1,2 Institute for Infocomm Research, A*STAR, Singapore 1 Nanyang Technological
Object Detection Based on Deep Learning
 Object Detection Based on Deep Learning Yurii Pashchenko AI Ukraine 2016, Kharkiv, 2016 Image classification (mostly what you ve seen) http://tutorial.caffe.berkeleyvision.org/caffe-cvpr15-detection.pdf
Object Detection Based on Deep Learning Yurii Pashchenko AI Ukraine 2016, Kharkiv, 2016 Image classification (mostly what you ve seen) http://tutorial.caffe.berkeleyvision.org/caffe-cvpr15-detection.pdf
Unified, real-time object detection
 Unified, real-time object detection Final Project Report, Group 02, 8 Nov 2016 Akshat Agarwal (13068), Siddharth Tanwar (13699) CS698N: Recent Advances in Computer Vision, Jul Nov 2016 Instructor: Gaurav
Unified, real-time object detection Final Project Report, Group 02, 8 Nov 2016 Akshat Agarwal (13068), Siddharth Tanwar (13699) CS698N: Recent Advances in Computer Vision, Jul Nov 2016 Instructor: Gaurav
Supplementary Material: Pixelwise Instance Segmentation with a Dynamically Instantiated Network
 Supplementary Material: Pixelwise Instance Segmentation with a Dynamically Instantiated Network Anurag Arnab and Philip H.S. Torr University of Oxford {anurag.arnab, philip.torr}@eng.ox.ac.uk 1. Introduction
Supplementary Material: Pixelwise Instance Segmentation with a Dynamically Instantiated Network Anurag Arnab and Philip H.S. Torr University of Oxford {anurag.arnab, philip.torr}@eng.ox.ac.uk 1. Introduction
YOLO9000: Better, Faster, Stronger
 YOLO9000: Better, Faster, Stronger Date: January 24, 2018 Prepared by Haris Khan (University of Toronto) Haris Khan CSC2548: Machine Learning in Computer Vision 1 Overview 1. Motivation for one-shot object
YOLO9000: Better, Faster, Stronger Date: January 24, 2018 Prepared by Haris Khan (University of Toronto) Haris Khan CSC2548: Machine Learning in Computer Vision 1 Overview 1. Motivation for one-shot object
Extend the shallow part of Single Shot MultiBox Detector via Convolutional Neural Network
 Extend the shallow part of Single Shot MultiBox Detector via Convolutional Neural Network Liwen Zheng, Canmiao Fu, Yong Zhao * School of Electronic and Computer Engineering, Shenzhen Graduate School of
Extend the shallow part of Single Shot MultiBox Detector via Convolutional Neural Network Liwen Zheng, Canmiao Fu, Yong Zhao * School of Electronic and Computer Engineering, Shenzhen Graduate School of
Lecture 5: Object Detection
 Object Detection CSED703R: Deep Learning for Visual Recognition (2017F) Lecture 5: Object Detection Bohyung Han Computer Vision Lab. bhhan@postech.ac.kr 2 Traditional Object Detection Algorithms Region-based
Object Detection CSED703R: Deep Learning for Visual Recognition (2017F) Lecture 5: Object Detection Bohyung Han Computer Vision Lab. bhhan@postech.ac.kr 2 Traditional Object Detection Algorithms Region-based
Object detection with CNNs
 Object detection with CNNs 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before CNNs After CNNs 0% 2006 2007 2008 2009 2010 2011 2012 2013 2014 2015 2016 year Region proposals
Object detection with CNNs 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before CNNs After CNNs 0% 2006 2007 2008 2009 2010 2011 2012 2013 2014 2015 2016 year Region proposals
Feature-Fused SSD: Fast Detection for Small Objects
 Feature-Fused SSD: Fast Detection for Small Objects Guimei Cao, Xuemei Xie, Wenzhe Yang, Quan Liao, Guangming Shi, Jinjian Wu School of Electronic Engineering, Xidian University, China xmxie@mail.xidian.edu.cn
Feature-Fused SSD: Fast Detection for Small Objects Guimei Cao, Xuemei Xie, Wenzhe Yang, Quan Liao, Guangming Shi, Jinjian Wu School of Electronic Engineering, Xidian University, China xmxie@mail.xidian.edu.cn
Optimizing Object Detection:
 Lecture 10: Optimizing Object Detection: A Case Study of R-CNN, Fast R-CNN, and Faster R-CNN and Single Shot Detection Visual Computing Systems Today s task: object detection Image classification: what
Lecture 10: Optimizing Object Detection: A Case Study of R-CNN, Fast R-CNN, and Faster R-CNN and Single Shot Detection Visual Computing Systems Today s task: object detection Image classification: what
Real-time Object Detection CS 229 Course Project
 Real-time Object Detection CS 229 Course Project Zibo Gong 1, Tianchang He 1, and Ziyi Yang 1 1 Department of Electrical Engineering, Stanford University December 17, 2016 Abstract Objection detection
Real-time Object Detection CS 229 Course Project Zibo Gong 1, Tianchang He 1, and Ziyi Yang 1 1 Department of Electrical Engineering, Stanford University December 17, 2016 Abstract Objection detection
R-FCN++: Towards Accurate Region-Based Fully Convolutional Networks for Object Detection
 The Thirty-Second AAAI Conference on Artificial Intelligence (AAAI-18) R-FCN++: Towards Accurate Region-Based Fully Convolutional Networks for Object Detection Zeming Li, 1 Yilun Chen, 2 Gang Yu, 2 Yangdong
The Thirty-Second AAAI Conference on Artificial Intelligence (AAAI-18) R-FCN++: Towards Accurate Region-Based Fully Convolutional Networks for Object Detection Zeming Li, 1 Yilun Chen, 2 Gang Yu, 2 Yangdong
Spatial Localization and Detection. Lecture 8-1
 Lecture 8: Spatial Localization and Detection Lecture 8-1 Administrative - Project Proposals were due on Saturday Homework 2 due Friday 2/5 Homework 1 grades out this week Midterm will be in-class on Wednesday
Lecture 8: Spatial Localization and Detection Lecture 8-1 Administrative - Project Proposals were due on Saturday Homework 2 due Friday 2/5 Homework 1 grades out this week Midterm will be in-class on Wednesday
Single-Shot Refinement Neural Network for Object Detection -Supplementary Material-
 Single-Shot Refinement Neural Network for Object Detection -Supplementary Material- Shifeng Zhang 1,2, Longyin Wen 3, Xiao Bian 3, Zhen Lei 1,2, Stan Z. Li 4,1,2 1 CBSR & NLPR, Institute of Automation,
Single-Shot Refinement Neural Network for Object Detection -Supplementary Material- Shifeng Zhang 1,2, Longyin Wen 3, Xiao Bian 3, Zhen Lei 1,2, Stan Z. Li 4,1,2 1 CBSR & NLPR, Institute of Automation,
Deep learning for object detection. Slides from Svetlana Lazebnik and many others
 Deep learning for object detection Slides from Svetlana Lazebnik and many others Recent developments in object detection 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before deep
Deep learning for object detection Slides from Svetlana Lazebnik and many others Recent developments in object detection 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before deep
MULTI-SCALE OBJECT DETECTION WITH FEATURE FUSION AND REGION OBJECTNESS NETWORK. Wenjie Guan, YueXian Zou*, Xiaoqun Zhou
 MULTI-SCALE OBJECT DETECTION WITH FEATURE FUSION AND REGION OBJECTNESS NETWORK Wenjie Guan, YueXian Zou*, Xiaoqun Zhou ADSPLAB/Intelligent Lab, School of ECE, Peking University, Shenzhen,518055, China
MULTI-SCALE OBJECT DETECTION WITH FEATURE FUSION AND REGION OBJECTNESS NETWORK Wenjie Guan, YueXian Zou*, Xiaoqun Zhou ADSPLAB/Intelligent Lab, School of ECE, Peking University, Shenzhen,518055, China
Category-level localization
 Category-level localization Cordelia Schmid Recognition Classification Object present/absent in an image Often presence of a significant amount of background clutter Localization / Detection Localize object
Category-level localization Cordelia Schmid Recognition Classification Object present/absent in an image Often presence of a significant amount of background clutter Localization / Detection Localize object
arxiv: v1 [cs.cv] 26 May 2017
![arxiv: v1 [cs.cv] 26 May 2017](/thumbs/78/78157133.jpg "arxiv: v1 [cs.cv] 26 May 2017") arxiv:1705.09587v1 [cs.cv] 26 May 2017 J. JEONG, H. PARK AND N. KWAK: UNDER REVIEW IN BMVC 2017 1 Enhancement of SSD by concatenating feature maps for object detection Jisoo Jeong soo3553@snu.ac.kr Hyojin
arxiv:1705.09587v1 [cs.cv] 26 May 2017 J. JEONG, H. PARK AND N. KWAK: UNDER REVIEW IN BMVC 2017 1 Enhancement of SSD by concatenating feature maps for object detection Jisoo Jeong soo3553@snu.ac.kr Hyojin
arxiv: v1 [cs.cv] 15 Oct 2018
![arxiv: v1 [cs.cv] 15 Oct 2018](/thumbs/89/99052786.jpg "arxiv: v1 [cs.cv] 15 Oct 2018") Instance Segmentation and Object Detection with Bounding Shape Masks Ha Young Kim 1,2,*, Ba Rom Kang 2 1 Department of Financial Engineering, Ajou University Worldcupro 206, Yeongtong-gu, Suwon, 16499,
Instance Segmentation and Object Detection with Bounding Shape Masks Ha Young Kim 1,2,*, Ba Rom Kang 2 1 Department of Financial Engineering, Ajou University Worldcupro 206, Yeongtong-gu, Suwon, 16499,
arxiv: v2 [cs.cv] 30 Mar 2016
![arxiv: v2 [cs.cv] 30 Mar 2016](/thumbs/86/94159476.jpg "arxiv: v2 [cs.cv] 30 Mar 2016") arxiv:1512.2325v2 [cs.cv] 3 Mar 216 SSD: Single Shot MultiBox Detector Wei Liu 1, Dragomir Anguelov 2, Dumitru Erhan 3, Christian Szegedy 3, Scott Reed 4, Cheng-Yang Fu 1, Alexander C. Berg 1 1 UNC Chapel
arxiv:1512.2325v2 [cs.cv] 3 Mar 216 SSD: Single Shot MultiBox Detector Wei Liu 1, Dragomir Anguelov 2, Dumitru Erhan 3, Christian Szegedy 3, Scott Reed 4, Cheng-Yang Fu 1, Alexander C. Berg 1 1 UNC Chapel
Deformable Part Models
 CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
arxiv: v1 [cs.cv] 15 Aug 2018
![arxiv: v1 [cs.cv] 15 Aug 2018](/thumbs/83/88609179.jpg "arxiv: v1 [cs.cv] 15 Aug 2018") SAN: Learning Relationship between Convolutional Features for Multi-Scale Object Detection arxiv:88.97v [cs.cv] 5 Aug 8 Yonghyun Kim [ 8 785], Bong-Nam Kang [ 688 75], and Daijin Kim [ 86 85] Department
SAN: Learning Relationship between Convolutional Features for Multi-Scale Object Detection arxiv:88.97v [cs.cv] 5 Aug 8 Yonghyun Kim [ 8 785], Bong-Nam Kang [ 688 75], and Daijin Kim [ 86 85] Department
[Supplementary Material] Improving Occlusion and Hard Negative Handling for Single-Stage Pedestrian Detectors
![[Supplementary Material] Improving Occlusion and Hard Negative Handling for Single-Stage Pedestrian Detectors](/thumbs/89/97941029.jpg "[Supplementary Material] Improving Occlusion and Hard Negative Handling for Single-Stage Pedestrian Detectors") [Supplementary Material] Improving Occlusion and Hard Negative Handling for Single-Stage Pedestrian Detectors Junhyug Noh Soochan Lee Beomsu Kim Gunhee Kim Department of Computer Science and Engineering
[Supplementary Material] Improving Occlusion and Hard Negative Handling for Single-Stage Pedestrian Detectors Junhyug Noh Soochan Lee Beomsu Kim Gunhee Kim Department of Computer Science and Engineering
arxiv: v3 [cs.cv] 12 Mar 2018
![arxiv: v3 [cs.cv] 12 Mar 2018](/thumbs/86/94163176.jpg "arxiv: v3 [cs.cv] 12 Mar 2018") Improving Object Localization with Fitness NMS and Bounded IoU Loss Lachlan Tychsen-Smith, Lars Petersson CSIRO (Data6) CSIRO-Synergy Building, Acton, ACT, 26 Lachlan.Tychsen-Smith@data6.csiro.au, Lars.Petersson@data6.csiro.au
Improving Object Localization with Fitness NMS and Bounded IoU Loss Lachlan Tychsen-Smith, Lars Petersson CSIRO (Data6) CSIRO-Synergy Building, Acton, ACT, 26 Lachlan.Tychsen-Smith@data6.csiro.au, Lars.Petersson@data6.csiro.au
An Object Detection Algorithm based on Deformable Part Models with Bing Features Chunwei Li1, a and Youjun Bu1, b
 5th International Conference on Advanced Materials and Computer Science (ICAMCS 2016) An Object Detection Algorithm based on Deformable Part Models with Bing Features Chunwei Li1, a and Youjun Bu1, b 1
5th International Conference on Advanced Materials and Computer Science (ICAMCS 2016) An Object Detection Algorithm based on Deformable Part Models with Bing Features Chunwei Li1, a and Youjun Bu1, b 1
Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks
 Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks Shaoqing Ren, Kaiming He, Ross Girshick, and Jian Sun Presented by Tushar Bansal Objective 1. Get bounding box for all objects
Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks Shaoqing Ren, Kaiming He, Ross Girshick, and Jian Sun Presented by Tushar Bansal Objective 1. Get bounding box for all objects
Supplementary Material: Unconstrained Salient Object Detection via Proposal Subset Optimization
 Supplementary Material: Unconstrained Salient Object via Proposal Subset Optimization 1. Proof of the Submodularity According to Eqns. 10-12 in our paper, the objective function of the proposed optimization
Supplementary Material: Unconstrained Salient Object via Proposal Subset Optimization 1. Proof of the Submodularity According to Eqns. 10-12 in our paper, the objective function of the proposed optimization
arxiv: v1 [cs.cv] 29 Nov 2018
![arxiv: v1 [cs.cv] 29 Nov 2018](/thumbs/93/114181352.jpg "arxiv: v1 [cs.cv] 29 Nov 2018") Grid R-CNN Xin Lu 1 Buyu Li 1 Yuxin Yue 1 Quanquan Li 1 Junjie Yan 1 1 SenseTime Group Limited {luxin,libuyu,yueyuxin,liquanquan,yanjunjie}@sensetime.com arxiv:1811.12030v1 [cs.cv] 29 Nov 2018 Abstract
Grid R-CNN Xin Lu 1 Buyu Li 1 Yuxin Yue 1 Quanquan Li 1 Junjie Yan 1 1 SenseTime Group Limited {luxin,libuyu,yueyuxin,liquanquan,yanjunjie}@sensetime.com arxiv:1811.12030v1 [cs.cv] 29 Nov 2018 Abstract
Object Detection. CS698N Final Project Presentation AKSHAT AGARWAL SIDDHARTH TANWAR
 Object Detection CS698N Final Project Presentation AKSHAT AGARWAL SIDDHARTH TANWAR Problem Description Arguably the most important part of perception Long term goals for object recognition: Generalization
Object Detection CS698N Final Project Presentation AKSHAT AGARWAL SIDDHARTH TANWAR Problem Description Arguably the most important part of perception Long term goals for object recognition: Generalization
Direct Multi-Scale Dual-Stream Network for Pedestrian Detection Sang-Il Jung and Ki-Sang Hong Image Information Processing Lab.
 [ICIP 2017] Direct Multi-Scale Dual-Stream Network for Pedestrian Detection Sang-Il Jung and Ki-Sang Hong Image Information Processing Lab., POSTECH Pedestrian Detection Goal To draw bounding boxes that
[ICIP 2017] Direct Multi-Scale Dual-Stream Network for Pedestrian Detection Sang-Il Jung and Ki-Sang Hong Image Information Processing Lab., POSTECH Pedestrian Detection Goal To draw bounding boxes that
EFFECTIVE OBJECT DETECTION FROM TRAFFIC CAMERA VIDEOS. Honghui Shi, Zhichao Liu*, Yuchen Fan, Xinchao Wang, Thomas Huang
 EFFECTIVE OBJECT DETECTION FROM TRAFFIC CAMERA VIDEOS Honghui Shi, Zhichao Liu*, Yuchen Fan, Xinchao Wang, Thomas Huang Image Formation and Processing (IFP) Group, University of Illinois at Urbana-Champaign
EFFECTIVE OBJECT DETECTION FROM TRAFFIC CAMERA VIDEOS Honghui Shi, Zhichao Liu*, Yuchen Fan, Xinchao Wang, Thomas Huang Image Formation and Processing (IFP) Group, University of Illinois at Urbana-Champaign
arxiv: v1 [cs.cv] 9 Aug 2017
![arxiv: v1 [cs.cv] 9 Aug 2017](/thumbs/78/78708739.jpg "arxiv: v1 [cs.cv] 9 Aug 2017") BlitzNet: A Real-Time Deep Network for Scene Understanding Nikita Dvornik Konstantin Shmelkov Julien Mairal Cordelia Schmid Inria arxiv:1708.02813v1 [cs.cv] 9 Aug 2017 Abstract Real-time scene understanding
BlitzNet: A Real-Time Deep Network for Scene Understanding Nikita Dvornik Konstantin Shmelkov Julien Mairal Cordelia Schmid Inria arxiv:1708.02813v1 [cs.cv] 9 Aug 2017 Abstract Real-time scene understanding
Fine-tuning Pre-trained Large Scaled ImageNet model on smaller dataset for Detection task
 Fine-tuning Pre-trained Large Scaled ImageNet model on smaller dataset for Detection task Kyunghee Kim Stanford University 353 Serra Mall Stanford, CA 94305 kyunghee.kim@stanford.edu Abstract We use a
Fine-tuning Pre-trained Large Scaled ImageNet model on smaller dataset for Detection task Kyunghee Kim Stanford University 353 Serra Mall Stanford, CA 94305 kyunghee.kim@stanford.edu Abstract We use a
arxiv: v1 [cs.cv] 26 Jun 2017
![arxiv: v1 [cs.cv] 26 Jun 2017](/thumbs/80/82184026.jpg "arxiv: v1 [cs.cv] 26 Jun 2017") Detecting Small Signs from Large Images arxiv:1706.08574v1 [cs.cv] 26 Jun 2017 Zibo Meng, Xiaochuan Fan, Xin Chen, Min Chen and Yan Tong Computer Science and Engineering University of South Carolina, Columbia,
Detecting Small Signs from Large Images arxiv:1706.08574v1 [cs.cv] 26 Jun 2017 Zibo Meng, Xiaochuan Fan, Xin Chen, Min Chen and Yan Tong Computer Science and Engineering University of South Carolina, Columbia,
An Analysis of Scale Invariance in Object Detection SNIP
 An Analysis of Scale Invariance in Object Detection SNIP Bharat Singh Larry S. Davis University of Maryland, College Park {bharat,lsd}@cs.umd.edu Abstract An analysis of different techniques for recognizing
An Analysis of Scale Invariance in Object Detection SNIP Bharat Singh Larry S. Davis University of Maryland, College Park {bharat,lsd}@cs.umd.edu Abstract An analysis of different techniques for recognizing
Yiqi Yan. May 10, 2017
 Yiqi Yan May 10, 2017 P a r t I F u n d a m e n t a l B a c k g r o u n d s Convolution Single Filter Multiple Filters 3 Convolution: case study, 2 filters 4 Convolution: receptive field receptive field
Yiqi Yan May 10, 2017 P a r t I F u n d a m e n t a l B a c k g r o u n d s Convolution Single Filter Multiple Filters 3 Convolution: case study, 2 filters 4 Convolution: receptive field receptive field
arxiv: v2 [cs.cv] 8 Apr 2018
![arxiv: v2 [cs.cv] 8 Apr 2018](/thumbs/86/94330536.jpg "arxiv: v2 [cs.cv] 8 Apr 2018") Single-Shot Object Detection with Enriched Semantics Zhishuai Zhang 1 Siyuan Qiao 1 Cihang Xie 1 Wei Shen 1,2 Bo Wang 3 Alan L. Yuille 1 Johns Hopkins University 1 Shanghai University 2 Hikvision Research
Single-Shot Object Detection with Enriched Semantics Zhishuai Zhang 1 Siyuan Qiao 1 Cihang Xie 1 Wei Shen 1,2 Bo Wang 3 Alan L. Yuille 1 Johns Hopkins University 1 Shanghai University 2 Hikvision Research
Efficient Segmentation-Aided Text Detection For Intelligent Robots
 Efficient Segmentation-Aided Text Detection For Intelligent Robots Junting Zhang, Yuewei Na, Siyang Li, C.-C. Jay Kuo University of Southern California Outline Problem Definition and Motivation Related
Efficient Segmentation-Aided Text Detection For Intelligent Robots Junting Zhang, Yuewei Na, Siyang Li, C.-C. Jay Kuo University of Southern California Outline Problem Definition and Motivation Related
Pedestrian Detection based on Deep Fusion Network using Feature Correlation
 Pedestrian Detection based on Deep Fusion Network using Feature Correlation Yongwoo Lee, Toan Duc Bui and Jitae Shin School of Electronic and Electrical Engineering, Sungkyunkwan University, Suwon, South
Pedestrian Detection based on Deep Fusion Network using Feature Correlation Yongwoo Lee, Toan Duc Bui and Jitae Shin School of Electronic and Electrical Engineering, Sungkyunkwan University, Suwon, South
Object Detection on Self-Driving Cars in China. Lingyun Li
 Object Detection on Self-Driving Cars in China Lingyun Li Introduction Motivation: Perception is the key of self-driving cars Data set: 10000 images with annotation 2000 images without annotation (not
Object Detection on Self-Driving Cars in China Lingyun Li Introduction Motivation: Perception is the key of self-driving cars Data set: 10000 images with annotation 2000 images without annotation (not
Adaptive Feeding: Achieving Fast and Accurate Detections by Adaptively Combining Object Detectors
 Adaptive Feeding: Achieving Fast and Accurate Detections by Adaptively Combining Object Detectors Hong-Yu Zhou Bin-Bin Gao Jianxin Wu National Key Laboratory for Novel Software Technology Nanjing University,
Adaptive Feeding: Achieving Fast and Accurate Detections by Adaptively Combining Object Detectors Hong-Yu Zhou Bin-Bin Gao Jianxin Wu National Key Laboratory for Novel Software Technology Nanjing University,
Loss Rank Mining: A General Hard Example Mining Method for Real-time Detectors
 Loss Rank Mining: A General Hard Example Mining Method for Real-time Detectors Hao Yu 1, Zhaoning Zhang 1, Zheng Qin 1, Hao Wu 2, Dongsheng Li 1, Jun Zhao 3, Xicheng Lu 1 1 Science and Technology on Parallel
Loss Rank Mining: A General Hard Example Mining Method for Real-time Detectors Hao Yu 1, Zhaoning Zhang 1, Zheng Qin 1, Hao Wu 2, Dongsheng Li 1, Jun Zhao 3, Xicheng Lu 1 1 Science and Technology on Parallel
G-CNN: an Iterative Grid Based Object Detector
 G-CNN: an Iterative Grid Based Object Detector Mahyar Najibi 1, Mohammad Rastegari 1,2, Larry S. Davis 1 1 University of Maryland, College Park 2 Allen Institute for Artificial Intelligence najibi@cs.umd.edu
G-CNN: an Iterative Grid Based Object Detector Mahyar Najibi 1, Mohammad Rastegari 1,2, Larry S. Davis 1 1 University of Maryland, College Park 2 Allen Institute for Artificial Intelligence najibi@cs.umd.edu
Object Detection. TA : Young-geun Kim. Biostatistics Lab., Seoul National University. March-June, 2018
 Object Detection TA : Young-geun Kim Biostatistics Lab., Seoul National University March-June, 2018 Seoul National University Deep Learning March-June, 2018 1 / 57 Index 1 Introduction 2 R-CNN 3 YOLO 4
Object Detection TA : Young-geun Kim Biostatistics Lab., Seoul National University March-June, 2018 Seoul National University Deep Learning March-June, 2018 1 / 57 Index 1 Introduction 2 R-CNN 3 YOLO 4
Learning Detection with Diverse Proposals
 Learning Detection with Diverse Proposals Samaneh Azadi 1, Jiashi Feng 2, and Trevor Darrell 1 1 University of California, Berkeley, 2 National University of Singapore {sazadi,trevor}@eecs.berkeley.edu
Learning Detection with Diverse Proposals Samaneh Azadi 1, Jiashi Feng 2, and Trevor Darrell 1 1 University of California, Berkeley, 2 National University of Singapore {sazadi,trevor}@eecs.berkeley.edu
Object Recognition II
 Object Recognition II Linda Shapiro EE/CSE 576 with CNN slides from Ross Girshick 1 Outline Object detection the task, evaluation, datasets Convolutional Neural Networks (CNNs) overview and history Region-based
Object Recognition II Linda Shapiro EE/CSE 576 with CNN slides from Ross Girshick 1 Outline Object detection the task, evaluation, datasets Convolutional Neural Networks (CNNs) overview and history Region-based
Mask R-CNN. presented by Jiageng Zhang, Jingyao Zhan, Yunhan Ma
 Mask R-CNN presented by Jiageng Zhang, Jingyao Zhan, Yunhan Ma Mask R-CNN Background Related Work Architecture Experiment Mask R-CNN Background Related Work Architecture Experiment Background From left
Mask R-CNN presented by Jiageng Zhang, Jingyao Zhan, Yunhan Ma Mask R-CNN Background Related Work Architecture Experiment Mask R-CNN Background Related Work Architecture Experiment Background From left
arxiv: v3 [cs.cv] 18 Oct 2017
![arxiv: v3 [cs.cv] 18 Oct 2017](/thumbs/75/72627087.jpg "arxiv: v3 [cs.cv] 18 Oct 2017") SSH: Single Stage Headless Face Detector Mahyar Najibi* Pouya Samangouei* Rama Chellappa University of Maryland arxiv:78.3979v3 [cs.cv] 8 Oct 27 najibi@cs.umd.edu Larry S. Davis {pouya,rama,lsd}@umiacs.umd.edu
SSH: Single Stage Headless Face Detector Mahyar Najibi* Pouya Samangouei* Rama Chellappa University of Maryland arxiv:78.3979v3 [cs.cv] 8 Oct 27 najibi@cs.umd.edu Larry S. Davis {pouya,rama,lsd}@umiacs.umd.edu
Object Detection with YOLO on Artwork Dataset
 Object Detection with YOLO on Artwork Dataset Yihui He Computer Science Department, Xi an Jiaotong University heyihui@stu.xjtu.edu.cn Abstract Person: 0.64 Horse: 0.28 I design a small object detection
Object Detection with YOLO on Artwork Dataset Yihui He Computer Science Department, Xi an Jiaotong University heyihui@stu.xjtu.edu.cn Abstract Person: 0.64 Horse: 0.28 I design a small object detection
Optimizing Object Detection:
 Lecture 10: Optimizing Object Detection: A Case Study of R-CNN, Fast R-CNN, and Faster R-CNN Visual Computing Systems Today s task: object detection Image classification: what is the object in this image?
Lecture 10: Optimizing Object Detection: A Case Study of R-CNN, Fast R-CNN, and Faster R-CNN Visual Computing Systems Today s task: object detection Image classification: what is the object in this image?
Towards Real-Time Automatic Number Plate. Detection: Dots in the Search Space
 Towards Real-Time Automatic Number Plate Detection: Dots in the Search Space Chi Zhang Department of Computer Science and Technology, Zhejiang University wellyzhangc@zju.edu.cn Abstract Automatic Number
Towards Real-Time Automatic Number Plate Detection: Dots in the Search Space Chi Zhang Department of Computer Science and Technology, Zhejiang University wellyzhangc@zju.edu.cn Abstract Automatic Number
Subspace Alignment Based Domain Adaptation for RCNN Detector
 RAJ, NAMBOODIRI, TUYTELAARS: ADAPTING RCNN DETECTOR 1 Subspace Alignment Based Domain Adaptation for RCNN Detector Anant Raj anantraj@iitk.ac.in Vinay P. Namboodiri vinaypn@iitk.ac.in Tinne Tuytelaars
RAJ, NAMBOODIRI, TUYTELAARS: ADAPTING RCNN DETECTOR 1 Subspace Alignment Based Domain Adaptation for RCNN Detector Anant Raj anantraj@iitk.ac.in Vinay P. Namboodiri vinaypn@iitk.ac.in Tinne Tuytelaars
A Comparison of CNN-based Face and Head Detectors for Real-Time Video Surveillance Applications
 A Comparison of CNN-based Face and Head Detectors for Real-Time Video Surveillance Applications Le Thanh Nguyen-Meidine 1, Eric Granger 1, Madhu Kiran 1 and Louis-Antoine Blais-Morin 2 1 École de technologie
A Comparison of CNN-based Face and Head Detectors for Real-Time Video Surveillance Applications Le Thanh Nguyen-Meidine 1, Eric Granger 1, Madhu Kiran 1 and Louis-Antoine Blais-Morin 2 1 École de technologie
An Analysis of Scale Invariance in Object Detection SNIP
 An Analysis of Scale Invariance in Object Detection SNIP Bharat Singh Larry S. Davis University of Maryland, College Park {bharat,lsd}@cs.umd.edu Abstract An analysis of different techniques for recognizing
An Analysis of Scale Invariance in Object Detection SNIP Bharat Singh Larry S. Davis University of Maryland, College Park {bharat,lsd}@cs.umd.edu Abstract An analysis of different techniques for recognizing
arxiv: v4 [cs.cv] 30 Nov 2016
![arxiv: v4 [cs.cv] 30 Nov 2016](/thumbs/71/65945911.jpg "arxiv: v4 [cs.cv] 30 Nov 2016") arxiv:1512.2325v4 [cs.cv] 3 Nov 216 SSD: Single Shot MultiBox Detector Wei Liu 1, Dragomir Anguelov 2, Dumitru Erhan 3, Christian Szegedy 3, Scott Reed 4, Cheng-Yang Fu 1, Alexander C. Berg 1 1 UNC Chapel
arxiv:1512.2325v4 [cs.cv] 3 Nov 216 SSD: Single Shot MultiBox Detector Wei Liu 1, Dragomir Anguelov 2, Dumitru Erhan 3, Christian Szegedy 3, Scott Reed 4, Cheng-Yang Fu 1, Alexander C. Berg 1 1 UNC Chapel
arxiv: v2 [cs.cv] 10 Apr 2017
![arxiv: v2 [cs.cv] 10 Apr 2017](/thumbs/80/82485703.jpg "arxiv: v2 [cs.cv] 10 Apr 2017") Fully Convolutional Instance-aware Semantic Segmentation Yi Li 1,2 Haozhi Qi 2 Jifeng Dai 2 Xiangyang Ji 1 Yichen Wei 2 1 Tsinghua University 2 Microsoft Research Asia {liyi14,xyji}@tsinghua.edu.cn, {v-haoq,jifdai,yichenw}@microsoft.com
Fully Convolutional Instance-aware Semantic Segmentation Yi Li 1,2 Haozhi Qi 2 Jifeng Dai 2 Xiangyang Ji 1 Yichen Wei 2 1 Tsinghua University 2 Microsoft Research Asia {liyi14,xyji}@tsinghua.edu.cn, {v-haoq,jifdai,yichenw}@microsoft.com
Adaptive Object Detection Using Adjacency and Zoom Prediction
 Adaptive Object Detection Using Adjacency and Zoom Prediction Yongxi Lu University of California, San Diego yol7@ucsd.edu Tara Javidi University of California, San Diego tjavidi@ucsd.edu Svetlana Lazebnik
Adaptive Object Detection Using Adjacency and Zoom Prediction Yongxi Lu University of California, San Diego yol7@ucsd.edu Tara Javidi University of California, San Diego tjavidi@ucsd.edu Svetlana Lazebnik
Detection and Localization with Multi-scale Models
 Detection and Localization with Multi-scale Models Eshed Ohn-Bar and Mohan M. Trivedi Computer Vision and Robotics Research Laboratory University of California San Diego {eohnbar, mtrivedi}@ucsd.edu Abstract
Detection and Localization with Multi-scale Models Eshed Ohn-Bar and Mohan M. Trivedi Computer Vision and Robotics Research Laboratory University of California San Diego {eohnbar, mtrivedi}@ucsd.edu Abstract
Detection III: Analyzing and Debugging Detection Methods
 CS 1699: Intro to Computer Vision Detection III: Analyzing and Debugging Detection Methods Prof. Adriana Kovashka University of Pittsburgh November 17, 2015 Today Review: Deformable part models How can
CS 1699: Intro to Computer Vision Detection III: Analyzing and Debugging Detection Methods Prof. Adriana Kovashka University of Pittsburgh November 17, 2015 Today Review: Deformable part models How can
Object Detection with Partial Occlusion Based on a Deformable Parts-Based Model
 Object Detection with Partial Occlusion Based on a Deformable Parts-Based Model Johnson Hsieh (johnsonhsieh@gmail.com), Alexander Chia (alexchia@stanford.edu) Abstract -- Object occlusion presents a major
Object Detection with Partial Occlusion Based on a Deformable Parts-Based Model Johnson Hsieh (johnsonhsieh@gmail.com), Alexander Chia (alexchia@stanford.edu) Abstract -- Object occlusion presents a major
arxiv: v2 [cs.cv] 23 Jan 2019
![arxiv: v2 [cs.cv] 23 Jan 2019](/thumbs/88/114974572.jpg "arxiv: v2 [cs.cv] 23 Jan 2019") COCO AP Consistent Optimization for Single-Shot Object Detection Tao Kong 1 Fuchun Sun 1 Huaping Liu 1 Yuning Jiang 2 Jianbo Shi 3 1 Department of Computer Science and Technology, Tsinghua University,
COCO AP Consistent Optimization for Single-Shot Object Detection Tao Kong 1 Fuchun Sun 1 Huaping Liu 1 Yuning Jiang 2 Jianbo Shi 3 1 Department of Computer Science and Technology, Tsinghua University,
arxiv: v1 [cs.cv] 4 Jun 2015
![arxiv: v1 [cs.cv] 4 Jun 2015](/thumbs/92/109659580.jpg "arxiv: v1 [cs.cv] 4 Jun 2015") Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks arxiv:1506.01497v1 [cs.cv] 4 Jun 2015 Shaoqing Ren Kaiming He Ross Girshick Jian Sun Microsoft Research {v-shren, kahe, rbg,
Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks arxiv:1506.01497v1 [cs.cv] 4 Jun 2015 Shaoqing Ren Kaiming He Ross Girshick Jian Sun Microsoft Research {v-shren, kahe, rbg,
arxiv: v3 [cs.cv] 24 Jan 2018
![arxiv: v3 [cs.cv] 24 Jan 2018](/thumbs/75/71614558.jpg "arxiv: v3 [cs.cv] 24 Jan 2018") Kaiming He Georgia Gkioxari Piotr Dolla r Ross Girshick arxiv:1703.06870v3 [cs.cv] 24 Jan 2018 Facebook AI Research (FAIR) Abstract class box We present a conceptually simple, flexible, and general framework
Kaiming He Georgia Gkioxari Piotr Dolla r Ross Girshick arxiv:1703.06870v3 [cs.cv] 24 Jan 2018 Facebook AI Research (FAIR) Abstract class box We present a conceptually simple, flexible, and general framework
PEDESTRIAN DETECTION IN CROWDED SCENES VIA SCALE AND OCCLUSION ANALYSIS
 PEDESTRIAN DETECTION IN CROWDED SCENES VIA SCALE AND OCCLUSION ANALYSIS Lu Wang Lisheng Xu Ming-Hsuan Yang Northeastern University, China University of California at Merced, USA ABSTRACT Despite significant
PEDESTRIAN DETECTION IN CROWDED SCENES VIA SCALE AND OCCLUSION ANALYSIS Lu Wang Lisheng Xu Ming-Hsuan Yang Northeastern University, China University of California at Merced, USA ABSTRACT Despite significant
arxiv: v1 [cs.cv] 10 Jan 2019
![arxiv: v1 [cs.cv] 10 Jan 2019](/thumbs/93/113326709.jpg "arxiv: v1 [cs.cv] 10 Jan 2019") Region Proposal by Guided Anchoring Jiaqi Wang 1 Kai Chen 1 Shuo Yang 2 Chen Change Loy 3 Dahua Lin 1 1 CUHK - SenseTime Joint Lab, The Chinese University of Hong Kong 2 Amazon Rekognition 3 Nanyang Technological
Region Proposal by Guided Anchoring Jiaqi Wang 1 Kai Chen 1 Shuo Yang 2 Chen Change Loy 3 Dahua Lin 1 1 CUHK - SenseTime Joint Lab, The Chinese University of Hong Kong 2 Amazon Rekognition 3 Nanyang Technological
arxiv: v3 [cs.cv] 17 May 2018
![arxiv: v3 [cs.cv] 17 May 2018](/thumbs/79/79331767.jpg "arxiv: v3 [cs.cv] 17 May 2018") FSSD: Feature Fusion Single Shot Multibox Detector Zuo-Xin Li Fu-Qiang Zhou Key Laboratory of Precision Opto-mechatronics Technology, Ministry of Education, Beihang University, Beijing 100191, China {lizuoxin,
FSSD: Feature Fusion Single Shot Multibox Detector Zuo-Xin Li Fu-Qiang Zhou Key Laboratory of Precision Opto-mechatronics Technology, Ministry of Education, Beihang University, Beijing 100191, China {lizuoxin,
Finding Tiny Faces Supplementary Materials
 Finding Tiny Faces Supplementary Materials Peiyun Hu, Deva Ramanan Robotics Institute Carnegie Mellon University {peiyunh,deva}@cs.cmu.edu 1. Error analysis Quantitative analysis We plot the distribution
Finding Tiny Faces Supplementary Materials Peiyun Hu, Deva Ramanan Robotics Institute Carnegie Mellon University {peiyunh,deva}@cs.cmu.edu 1. Error analysis Quantitative analysis We plot the distribution
Constrained Convolutional Neural Networks for Weakly Supervised Segmentation. Deepak Pathak, Philipp Krähenbühl and Trevor Darrell
 Constrained Convolutional Neural Networks for Weakly Supervised Segmentation Deepak Pathak, Philipp Krähenbühl and Trevor Darrell 1 Multi-class Image Segmentation Assign a class label to each pixel in
Constrained Convolutional Neural Networks for Weakly Supervised Segmentation Deepak Pathak, Philipp Krähenbühl and Trevor Darrell 1 Multi-class Image Segmentation Assign a class label to each pixel in
Faster R-CNN Implementation using CUDA Architecture in GeForce GTX 10 Series
 INTERNATIONAL JOURNAL OF ELECTRICAL AND ELECTRONIC SYSTEMS RESEARCH Faster R-CNN Implementation using CUDA Architecture in GeForce GTX 10 Series Basyir Adam, Fadhlan Hafizhelmi Kamaru Zaman, Member, IEEE,
INTERNATIONAL JOURNAL OF ELECTRICAL AND ELECTRONIC SYSTEMS RESEARCH Faster R-CNN Implementation using CUDA Architecture in GeForce GTX 10 Series Basyir Adam, Fadhlan Hafizhelmi Kamaru Zaman, Member, IEEE,
Supplementary Material
 Supplementary Material 1. Human annotation user interfaces Supplementary Figure 1 shows a screenshot of the frame-level classification tool. The segment-level tool was very similar. Supplementary Figure
Supplementary Material 1. Human annotation user interfaces Supplementary Figure 1 shows a screenshot of the frame-level classification tool. The segment-level tool was very similar. Supplementary Figure
PT-NET: IMPROVE OBJECT AND FACE DETECTION VIA A PRE-TRAINED CNN MODEL
 PT-NET: IMPROVE OBJECT AND FACE DETECTION VIA A PRE-TRAINED CNN MODEL Yingxin Lou 1, Guangtao Fu 2, Zhuqing Jiang 1, Aidong Men 1, and Yun Zhou 2 1 Beijing University of Posts and Telecommunications, Beijing,
PT-NET: IMPROVE OBJECT AND FACE DETECTION VIA A PRE-TRAINED CNN MODEL Yingxin Lou 1, Guangtao Fu 2, Zhuqing Jiang 1, Aidong Men 1, and Yun Zhou 2 1 Beijing University of Posts and Telecommunications, Beijing,
SSD: Single Shot MultiBox Detector
 SSD: Single Shot MultiBox Detector Wei Liu 1(B), Dragomir Anguelov 2, Dumitru Erhan 3, Christian Szegedy 3, Scott Reed 4, Cheng-Yang Fu 1, and Alexander C. Berg 1 1 UNC Chapel Hill, Chapel Hill, USA {wliu,cyfu,aberg}@cs.unc.edu
SSD: Single Shot MultiBox Detector Wei Liu 1(B), Dragomir Anguelov 2, Dumitru Erhan 3, Christian Szegedy 3, Scott Reed 4, Cheng-Yang Fu 1, and Alexander C. Berg 1 1 UNC Chapel Hill, Chapel Hill, USA {wliu,cyfu,aberg}@cs.unc.edu
arxiv: v1 [cs.cv] 5 Oct 2015
![arxiv: v1 [cs.cv] 5 Oct 2015](/thumbs/71/66021937.jpg "arxiv: v1 [cs.cv] 5 Oct 2015") Efficient Object Detection for High Resolution Images Yongxi Lu 1 and Tara Javidi 1 arxiv:1510.01257v1 [cs.cv] 5 Oct 2015 Abstract Efficient generation of high-quality object proposals is an essential
Efficient Object Detection for High Resolution Images Yongxi Lu 1 and Tara Javidi 1 arxiv:1510.01257v1 [cs.cv] 5 Oct 2015 Abstract Efficient generation of high-quality object proposals is an essential
arxiv: v1 [cs.cv] 19 Feb 2019
![arxiv: v1 [cs.cv] 19 Feb 2019](/thumbs/88/117177831.jpg "arxiv: v1 [cs.cv] 19 Feb 2019") Detector-in-Detector: Multi-Level Analysis for Human-Parts Xiaojie Li 1[0000 0001 6449 2727], Lu Yang 2[0000 0003 3857 3982], Qing Song 2[0000000346162200], and Fuqiang Zhou 1[0000 0001 9341 9342] arxiv:1902.07017v1
Detector-in-Detector: Multi-Level Analysis for Human-Parts Xiaojie Li 1[0000 0001 6449 2727], Lu Yang 2[0000 0003 3857 3982], Qing Song 2[0000000346162200], and Fuqiang Zhou 1[0000 0001 9341 9342] arxiv:1902.07017v1
arxiv: v1 [cs.cv] 30 Apr 2018
![arxiv: v1 [cs.cv] 30 Apr 2018](/thumbs/89/98495424.jpg "arxiv: v1 [cs.cv] 30 Apr 2018") An Anti-fraud System for Car Insurance Claim Based on Visual Evidence Pei Li Univeristy of Notre Dame BingYu Shen University of Notre dame Weishan Dong IBM Research China arxiv:184.1127v1 [cs.cv] 3 Apr
An Anti-fraud System for Car Insurance Claim Based on Visual Evidence Pei Li Univeristy of Notre Dame BingYu Shen University of Notre dame Weishan Dong IBM Research China arxiv:184.1127v1 [cs.cv] 3 Apr
arxiv: v1 [cs.cv] 5 Dec 2017
![arxiv: v1 [cs.cv] 5 Dec 2017](/thumbs/87/95895504.jpg "arxiv: v1 [cs.cv] 5 Dec 2017") R-FCN-3000 at 30fps: Decoupling Detection and Classification Bharat Singh*1 Hengduo Li*2 Abhishek Sharma3 Larry S. Davis1 University of Maryland, College Park 1 Fudan University2 Gobasco AI Labs3 arxiv:1712.01802v1
R-FCN-3000 at 30fps: Decoupling Detection and Classification Bharat Singh*1 Hengduo Li*2 Abhishek Sharma3 Larry S. Davis1 University of Maryland, College Park 1 Fudan University2 Gobasco AI Labs3 arxiv:1712.01802v1
arxiv: v1 [cs.cv] 23 Sep 2018 Abstract
![arxiv: v1 [cs.cv] 23 Sep 2018 Abstract](/thumbs/87/95535861.jpg "arxiv: v1 [cs.cv] 23 Sep 2018 Abstract") Softer-NMS: Rethinking Bounding Box Regression for Accurate Object Detection Yihui He1 1 Xiangyu Zhang2 Carnegie Mellon University Kris Kitani1 Marios Savvides1 2 Megvii Inc. (Face++) arxiv:1809.08545v1
Softer-NMS: Rethinking Bounding Box Regression for Accurate Object Detection Yihui He1 1 Xiangyu Zhang2 Carnegie Mellon University Kris Kitani1 Marios Savvides1 2 Megvii Inc. (Face++) arxiv:1809.08545v1
A Study of Vehicle Detector Generalization on U.S. Highway
 26 IEEE 9th International Conference on Intelligent Transportation Systems (ITSC) Windsor Oceanico Hotel, Rio de Janeiro, Brazil, November -4, 26 A Study of Vehicle Generalization on U.S. Highway Rakesh
26 IEEE 9th International Conference on Intelligent Transportation Systems (ITSC) Windsor Oceanico Hotel, Rio de Janeiro, Brazil, November -4, 26 A Study of Vehicle Generalization on U.S. Highway Rakesh
arxiv: v2 [cs.cv] 13 Jun 2017
![arxiv: v2 [cs.cv] 13 Jun 2017](/thumbs/81/84244189.jpg "arxiv: v2 [cs.cv] 13 Jun 2017") Point Linking Network for Object Detection Xinggang Wang 1, Kaibing Chen 1, Zilong Huang 1, Cong Yao 2, Wenyu Liu 1 1 School of EIC, Huazhong University of Science and Technology, 2 Megvii Technology Inc.
Point Linking Network for Object Detection Xinggang Wang 1, Kaibing Chen 1, Zilong Huang 1, Cong Yao 2, Wenyu Liu 1 1 School of EIC, Huazhong University of Science and Technology, 2 Megvii Technology Inc.
CS 1674: Intro to Computer Vision. Object Recognition. Prof. Adriana Kovashka University of Pittsburgh April 3, 5, 2018
 CS 1674: Intro to Computer Vision Object Recognition Prof. Adriana Kovashka University of Pittsburgh April 3, 5, 2018 Different Flavors of Object Recognition Semantic Segmentation Classification + Localization
CS 1674: Intro to Computer Vision Object Recognition Prof. Adriana Kovashka University of Pittsburgh April 3, 5, 2018 Different Flavors of Object Recognition Semantic Segmentation Classification + Localization
A Novel Representation and Pipeline for Object Detection
 A Novel Representation and Pipeline for Object Detection Vishakh Hegde Stanford University vishakh@stanford.edu Manik Dhar Stanford University dmanik@stanford.edu Abstract Object detection is an important
A Novel Representation and Pipeline for Object Detection Vishakh Hegde Stanford University vishakh@stanford.edu Manik Dhar Stanford University dmanik@stanford.edu Abstract Object detection is an important
Learning Globally Optimized Object Detector via Policy Gradient
 Learning Globally Optimized Object Detector via Policy Gradient Yongming Rao 1,2,3, Dahua Lin 4, Jiwen Lu 1,2,3, Jie Zhou 1,2,3 1 Department of Automation, Tsinghua University 2 State Key Lab of Intelligent
Learning Globally Optimized Object Detector via Policy Gradient Yongming Rao 1,2,3, Dahua Lin 4, Jiwen Lu 1,2,3, Jie Zhou 1,2,3 1 Department of Automation, Tsinghua University 2 State Key Lab of Intelligent
arxiv: v2 [cs.cv] 22 Nov 2017
![arxiv: v2 [cs.cv] 22 Nov 2017](/thumbs/86/93068521.jpg "arxiv: v2 [cs.cv] 22 Nov 2017") Face Attention Network: An Effective Face Detector for the Occluded Faces Jianfeng Wang College of Software, Beihang University Beijing, China wjfwzzc@buaa.edu.cn Ye Yuan Megvii Inc. (Face++) Beijing,
Face Attention Network: An Effective Face Detector for the Occluded Faces Jianfeng Wang College of Software, Beihang University Beijing, China wjfwzzc@buaa.edu.cn Ye Yuan Megvii Inc. (Face++) Beijing,
arxiv: v1 [cs.cv] 31 Mar 2017
![arxiv: v1 [cs.cv] 31 Mar 2017](/thumbs/80/81467687.jpg "arxiv: v1 [cs.cv] 31 Mar 2017") End-to-End Spatial Transform Face Detection and Recognition Liying Chi Zhejiang University charrin0531@gmail.com Hongxin Zhang Zhejiang University zhx@cad.zju.edu.cn Mingxiu Chen Rokid.inc cmxnono@rokid.com
End-to-End Spatial Transform Face Detection and Recognition Liying Chi Zhejiang University charrin0531@gmail.com Hongxin Zhang Zhejiang University zhx@cad.zju.edu.cn Mingxiu Chen Rokid.inc cmxnono@rokid.com
A FRAMEWORK OF EXTRACTING MULTI-SCALE FEATURES USING MULTIPLE CONVOLUTIONAL NEURAL NETWORKS. Kuan-Chuan Peng and Tsuhan Chen
 A FRAMEWORK OF EXTRACTING MULTI-SCALE FEATURES USING MULTIPLE CONVOLUTIONAL NEURAL NETWORKS Kuan-Chuan Peng and Tsuhan Chen School of Electrical and Computer Engineering, Cornell University, Ithaca, NY
A FRAMEWORK OF EXTRACTING MULTI-SCALE FEATURES USING MULTIPLE CONVOLUTIONAL NEURAL NETWORKS Kuan-Chuan Peng and Tsuhan Chen School of Electrical and Computer Engineering, Cornell University, Ithaca, NY
Modern Convolutional Object Detectors
 Modern Convolutional Object Detectors Faster R-CNN, R-FCN, SSD 29 September 2017 Presented by: Kevin Liang Papers Presented Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks
Modern Convolutional Object Detectors Faster R-CNN, R-FCN, SSD 29 September 2017 Presented by: Kevin Liang Papers Presented Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks
arxiv: v1 [cs.cv] 9 Aug 2018
![arxiv: v1 [cs.cv] 9 Aug 2018](/thumbs/92/108987513.jpg "arxiv: v1 [cs.cv] 9 Aug 2018") 1 The Elephant in the Room Amir Rosenfeld 1, Richard Zemel 2, and John K. Tsotsos 1 1 York University 2 University of Toronto 1,2 Toronto, Canada arxiv:1808.03305v1 [cs.cv] 9 Aug 2018 Abstract We showcase
1 The Elephant in the Room Amir Rosenfeld 1, Richard Zemel 2, and John K. Tsotsos 1 1 York University 2 University of Toronto 1,2 Toronto, Canada arxiv:1808.03305v1 [cs.cv] 9 Aug 2018 Abstract We showcase
Future directions in computer vision. Larry Davis Computer Vision Laboratory University of Maryland College Park MD USA
 Future directions in computer vision Larry Davis Computer Vision Laboratory University of Maryland College Park MD USA Presentation overview Future Directions Workshop on Computer Vision Object detection
Future directions in computer vision Larry Davis Computer Vision Laboratory University of Maryland College Park MD USA Presentation overview Future Directions Workshop on Computer Vision Object detection
Object Detection for Crime Scene Evidence Analysis using Deep Learning
 Object Detection for Crime Scene Evidence Analysis using Deep Learning Surajit Saikia 1,2, E. Fidalgo 1,2, Enrique Alegre 1,2 and 2,3 Laura Fernández-Robles 1 Department of Electrical, Systems and Automation,
Object Detection for Crime Scene Evidence Analysis using Deep Learning Surajit Saikia 1,2, E. Fidalgo 1,2, Enrique Alegre 1,2 and 2,3 Laura Fernández-Robles 1 Department of Electrical, Systems and Automation,
Classifying a specific image region using convolutional nets with an ROI mask as input
 Classifying a specific image region using convolutional nets with an ROI mask as input 1 Sagi Eppel Abstract Convolutional neural nets (CNN) are the leading computer vision method for classifying images.
Classifying a specific image region using convolutional nets with an ROI mask as input 1 Sagi Eppel Abstract Convolutional neural nets (CNN) are the leading computer vision method for classifying images.
arxiv: v1 [cs.cv] 6 Jul 2017
![arxiv: v1 [cs.cv] 6 Jul 2017](/thumbs/76/74371360.jpg "arxiv: v1 [cs.cv] 6 Jul 2017") RON: Reverse Connection with Objectness Prior Networks for Object Detection arxiv:1707.01691v1 [cs.cv] 6 Jul 2017 Tao Kong 1 Fuchun Sun 1 Anbang Yao 2 Huaping Liu 1 Ming Lu 3 Yurong Chen 2 1 State Key
RON: Reverse Connection with Objectness Prior Networks for Object Detection arxiv:1707.01691v1 [cs.cv] 6 Jul 2017 Tao Kong 1 Fuchun Sun 1 Anbang Yao 2 Huaping Liu 1 Ming Lu 3 Yurong Chen 2 1 State Key
Content-Based Image Recovery
 Content-Based Image Recovery Hong-Yu Zhou and Jianxin Wu National Key Laboratory for Novel Software Technology Nanjing University, China zhouhy@lamda.nju.edu.cn wujx2001@nju.edu.cn Abstract. We propose
Content-Based Image Recovery Hong-Yu Zhou and Jianxin Wu National Key Laboratory for Novel Software Technology Nanjing University, China zhouhy@lamda.nju.edu.cn wujx2001@nju.edu.cn Abstract. We propose
Hand Detection For Grab-and-Go Groceries
 Hand Detection For Grab-and-Go Groceries Xianlei Qiu Stanford University xianlei@stanford.edu Shuying Zhang Stanford University shuyingz@stanford.edu Abstract Hands detection system is a very critical
Hand Detection For Grab-and-Go Groceries Xianlei Qiu Stanford University xianlei@stanford.edu Shuying Zhang Stanford University shuyingz@stanford.edu Abstract Hands detection system is a very critical
arxiv: v1 [cs.cv] 22 Mar 2018
![arxiv: v1 [cs.cv] 22 Mar 2018](/thumbs/89/99243655.jpg "arxiv: v1 [cs.cv] 22 Mar 2018") Single-Shot Bidirectional Pyramid Networks for High-Quality Object Detection Xiongwei Wu, Daoxin Zhang, Jianke Zhu, Steven C.H. Hoi School of Information Systems, Singapore Management University, Singapore
Single-Shot Bidirectional Pyramid Networks for High-Quality Object Detection Xiongwei Wu, Daoxin Zhang, Jianke Zhu, Steven C.H. Hoi School of Information Systems, Singapore Management University, Singapore
R-FCN-3000 at 30fps: Decoupling Detection and Classification
 R-FCN-3000 at 30fps: Decoupling Detection and Classification Bharat Singh* 1 Hengduo Li* 2 Abhishek Sharma 3 Larry S. Davis 1 University of Maryland, College Park 1 Fudan University 2 Gobasco AI Labs 3
R-FCN-3000 at 30fps: Decoupling Detection and Classification Bharat Singh* 1 Hengduo Li* 2 Abhishek Sharma 3 Larry S. Davis 1 University of Maryland, College Park 1 Fudan University 2 Gobasco AI Labs 3
Boosting Object Proposals: From Pascal to COCO
 Boosting Object Proposals: From Pascal to COCO Jordi Pont-Tuset and Luc Van Gool Computer Vision Lab, ETH Zürich, Switzerland {jponttuset,vangool}@vision.ee.ethz.ch Abstract Computer vision in general,
Boosting Object Proposals: From Pascal to COCO Jordi Pont-Tuset and Luc Van Gool Computer Vision Lab, ETH Zürich, Switzerland {jponttuset,vangool}@vision.ee.ethz.ch Abstract Computer vision in general,
arxiv: v2 [cs.cv] 19 Sep 2017
![arxiv: v2 [cs.cv] 19 Sep 2017](/thumbs/93/111864862.jpg "arxiv: v2 [cs.cv] 19 Sep 2017") Beyond Skip Connections: Top-Down Modulation for Object Detection Abhinav Shrivastava 1,3 Rahul Sukthankar 3 Jitendra Malik 2,3 Abhinav Gupta 1,3 1 Carnegie Mellon University 2 University of California,
Beyond Skip Connections: Top-Down Modulation for Object Detection Abhinav Shrivastava 1,3 Rahul Sukthankar 3 Jitendra Malik 2,3 Abhinav Gupta 1,3 1 Carnegie Mellon University 2 University of California,
Channel Locality Block: A Variant of Squeeze-and-Excitation
 Channel Locality Block: A Variant of Squeeze-and-Excitation 1 st Huayu Li Northern Arizona University Flagstaff, United State Northern Arizona University hl459@nau.edu arxiv:1901.01493v1 [cs.lg] 6 Jan
Channel Locality Block: A Variant of Squeeze-and-Excitation 1 st Huayu Li Northern Arizona University Flagstaff, United State Northern Arizona University hl459@nau.edu arxiv:1901.01493v1 [cs.lg] 6 Jan
arxiv: v1 [cs.cv] 31 Mar 2016
![arxiv: v1 [cs.cv] 31 Mar 2016](/thumbs/92/108399479.jpg "arxiv: v1 [cs.cv] 31 Mar 2016") Object Boundary Guided Semantic Segmentation Qin Huang, Chunyang Xia, Wenchao Zheng, Yuhang Song, Hao Xu and C.-C. Jay Kuo arxiv:1603.09742v1 [cs.cv] 31 Mar 2016 University of Southern California Abstract.
Object Boundary Guided Semantic Segmentation Qin Huang, Chunyang Xia, Wenchao Zheng, Yuhang Song, Hao Xu and C.-C. Jay Kuo arxiv:1603.09742v1 [cs.cv] 31 Mar 2016 University of Southern California Abstract.
DPATCH: An Adversarial Patch Attack on Object Detectors
 DPATCH: An Adversarial Patch Attack on Object Detectors Xin Liu1, Huanrui Yang1, Ziwei Liu2, Linghao Song1, Hai Li1, Yiran Chen1 1 Duke 1 University, 2 The Chinese University of Hong Kong {xin.liu4, huanrui.yang,
DPATCH: An Adversarial Patch Attack on Object Detectors Xin Liu1, Huanrui Yang1, Ziwei Liu2, Linghao Song1, Hai Li1, Yiran Chen1 1 Duke 1 University, 2 The Chinese University of Hong Kong {xin.liu4, huanrui.yang,