Predicting 3D People from 2D Pictures
|
|
|
- Jasmine Rice
- 6 years ago
- Views:
Transcription
1 Predicting 3D People from 2D Pictures Leonid Sigal Michael J. Black Department of Computer Science Brown University CIAR Summer School August 15-20, 2006 Leonid Sigal
2 Introduction Articulated pose estimation from single-view monocular image(s) (2D) Picture (3D) Person

3 Introduction Articulated pose estimation from single-view monocular image(s) (2D) Picture (3D) Person Entertainment: Animation, Games Clinical: Rehabilitation medicine Security: Surveillance Understanding: Gesture/Activity recognition







4 Why is it hard? Appearance/size/shape of people can vary dramatically The bones and joints are observable indirectly (obstructed by clothing) Occlusions High dimensionality of the state space Lose of depth information in 2D image projections
5 Approach Break up a very hard problem into smaller manageable pieces Tools Graphical models Image 2D Pose 3D Pose Belief Propagation
6 Approach Break up a very hard problem into smaller manageable pieces 2D Pose Image 3D Pose Tools Graphical models Belief Propagation
7 Approach Break up a very hard problem into smaller manageable pieces 2D Pose Image 3D Pose Tracking Tools Graphical models Belief Propagation
8 Hierarchical Inference Framework Break up a very hard problem into smaller manageable pieces Image 2D Pose 3D Pose Tracking Sigal & Black, CVPR 2006 Sigal & Black, AMDO 2006


9 Hierarchical Inference Framework Break up a very hard problem into smaller manageable pieces Image 2D Pose 3D Pose Tracking We are able to infer the 3D pose from a single image But, are still able to make use of temporal consistency when it is available Howe, Leventon, Freeman, 00




10 Discriminative Approaches Sminchisescu, Kanaujia, Li, Metaxas, 05 Agarwal & Triggs, 04 Rosales & Sclaroff, 00 Shakhnarovich, Viola, Darrell, 03 Tend to be very fast Work well on the data they are trained on Generalize poorly to data they have never seen
11 Advantage of Hierarchical Inference Image 2D Pose 3D Pose Tracking Better generalization in situations where good features are unavailable (lack of good silhouettes) via the use intermediate Generative 2D pose estimation Modularity Can easily substitute different 2D pose estimation modules Fully probabilistic approach
12 Hierarchical Graphical Model Structure 3D 2D Image t-1 t t+1
13 Hierarchical Graphical Model Structure 3D 2D Image t-1 t t+1
14 Hierarchical Graphical Model Structure 3D 2D Image t-1 t t+1
15 Hierarchical Graphical Model Structure 3D 2D Image t-1 t t+1
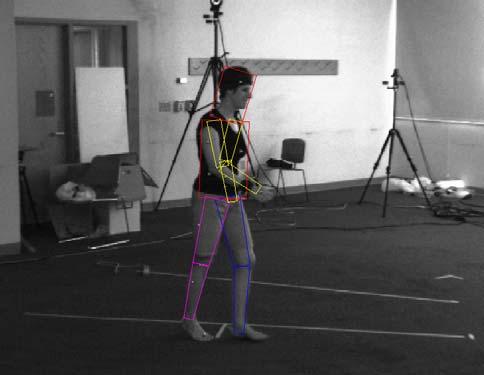
16 Inferring 2D pose Image 2D Pose 3D Pose Tracking Occlusion-sensitive Loose-limbed body model
17 2D Loose-limbed Body Model
18 2D Loose-limbed Body Model
19 2D Loose-limbed Body Model Kinematic
20 2D Loose-limbed Body Model Kinematic
21 2D Loose-limbed Body Model Kinematic Occlusion
22 2D Loose-limbed Body Model X 1 ε R 5 Kinematic X 10 X 8 X 6 X 4 X 2 Occlusion X 9 X 7 X 5 X 3

23 2D Loose-limbed Body Model ε R X ={ X,,, } 5 1 X 2 X 10 X 1 Kinematic X 10 X 8 X 6 X 4 X 2 Occlusion X 9 X 7 X 5 X 3
24 2D Loose-limbed Body Model X 10 X 8 X 1 X 6 X 4 X 2 Exact inference in tree-structured graphical models can be computed using BP But, not when X 9 X 7 X 5 X 3 State-space is continuous 10 Likelihoods (or potentials) are not Gaussian Graph contains loops This forces the use of approximate inference algorithms 2 4 PAMPAS: M. Isard, Non-Parametric BP: E. Sudderth, A. Ihler, W. Freeman, A. Willsky, 03
25 Particle Message Passing I t e r a t e Start with some distribution for all or sub-set of parts/limbs Evaluate the likelihood to see which parts/limbs best describe the image Propagate information from parts/limbs to neighboring parts/limbs Postulate (new) consistent poses for limbs based on all available constraints Output the distributions over parts

26 Inferring 2D pose Occlusion-sensitive Loose-limbed body model allows us to infer the 2D pose reliably Even when motions are complex Moving Camera
27 Summary so far Image 2D Pose 3D Pose Tracking Occlusion-sensitive Loose-limbed body model


28 Inferring 3D pose from 2D pose Image 2D Pose 3D Pose We obtain estimates for the joints automatically We learn direct probabilistic mapping Tracking Camillo J. Taylor, 00
29 Inferring 3D pose from 2D pose Image 2D Pose 3D Pose Tracking Mixture of Experts (MoE) Sminchisescu et al, 05 Waterhouse et al, 96
30 Inferring 3D pose from 2D pose We want to estimate a distribution/mapping p(3d Pose 2D Pose) X ε R n 2D Pose p(y X) Y ε R m 3D Pose Problem: p(y X) is non-linear mapping, and not one-to-one
31 Mixture of Experts (MoE) We want to estimate a distribution/mapping p(3d Pose 2D Pose) X ε R n 2D Pose p(y X) Y ε R m 3D Pose Solution: p(y X) may be approximated by a locally linear mappings (experts)
32 MoE Formally 2D Body Pose Expert: probability of the output 3D pose Y according to the k-th expert K p( Y X) p ( Y X) p ( k X) e, k g, k 3D Body Pose k= 1 Sum over all experts Gaiting Network: probability that input 2D pose X is assigned to the k-th expert. Training of MoE is done using EM procedure (similar to learning Mixture of Gaussians)
33 Illustration of 3D pose inference Query 2D pose X ε R n 2D Pose p g,k (k X) Gaiting network p e,k (Y X) Linear mapping Y ε R m 3D Pose
34 Illustration of 3D pose inference Query 2D pose X ε R n 2D Pose p g,k (k X) Gaiting network p e,k (Y X) Linear mapping Y ε R m 3D Pose
35 Performance Two action-specific MoE models are trained Walking D/3D MOCAP pose pairs for training 1398 video frames used for testing Performance View only: 14 mm Pose only: 23 mm Overall: 30 mm Dancing D/3D MOCAP pose pairs for training 2074 video frames used for testing Performance View only: 22 mm Pose only: 59 mm Overall: 64 mm Structured motion / Performance

36 How well does MoE model work?
37 Summary so far Image 2D Pose 3D Pose Tracking Occlusion-sensitive Loose-limbed body model Mixture of Experts (MoE)
38 Summary so far Image 2D Pose 3D Pose Tracking Hidden Markov Model (HMM)
39 Tracking in 3D We have a distribution over 3D poses at every time instance Y 0 Y 1 Y 2 Y T I 0 I 1 I 2 I T Assuming that 3D pose at time t is conditionally independent of the state at time t-2 given state at t-1
40 Tracking in 3D (inference) Inference in this graphical model can be done using the tools we already have PAMPAS/Non-parametric belief propagation Y 0 Y 1 Y 2 Y T I 0 I 1 I 2 I T
41 Summary so far Image 2D Pose 3D Pose Tracking Occlusion-sensitive Loose-limbed body model Mixture of Experts (MoE) Hidden Markov Model (HMM)
42 Hierarchical 3D Pose Estimation from Single View Monocular Images Distribution Most Likely Sample Distribution Most Likely Sample Frame 50 Frame 20 Frame 10 Image 2D Pose Estimation 3D Pose Estimation
43 Hierarchical 3D Pose Estimation from Single View Monocular Images Distribution Most Likely Sample Distribution Most Likely Sample Frame 50 Frame 30 Frame 10 Image 2D Pose Estimation 3D Pose Estimation

44 Tracking in 3D


45 Tracking in 3D

46 Summary Image 2D Pose 3D Pose Tracking We introduced a novel hierarchical inference framework Where we mediate the complexity of single-image monocular 3D pose estimation by intermediate 2D pose estimation stage Inference in this framework can be tractably done using a variant of Non-parametric Belief Propagation Results obtained are very encouraging
47 Thank You! Questions?
Inferring 3D People from 2D Images
 Inferring 3D People from 2D Images Department of Computer Science Brown University http://www.cs.brown.edu/~black Collaborators Hedvig Sidenbladh, Swedish Defense Research Inst. Leon Sigal, Brown University
Inferring 3D People from 2D Images Department of Computer Science Brown University http://www.cs.brown.edu/~black Collaborators Hedvig Sidenbladh, Swedish Defense Research Inst. Leon Sigal, Brown University
Inferring 3D from 2D
 Inferring 3D from 2D History Monocular vs. multi-view analysis Difficulties structure of the solution and ambiguities static and dynamic ambiguities Modeling frameworks for inference and learning top-down
Inferring 3D from 2D History Monocular vs. multi-view analysis Difficulties structure of the solution and ambiguities static and dynamic ambiguities Modeling frameworks for inference and learning top-down
Part I: HumanEva-I dataset and evaluation metrics
 Part I: HumanEva-I dataset and evaluation metrics Leonid Sigal Michael J. Black Department of Computer Science Brown University http://www.cs.brown.edu/people/ls/ http://vision.cs.brown.edu/humaneva/ Motivation
Part I: HumanEva-I dataset and evaluation metrics Leonid Sigal Michael J. Black Department of Computer Science Brown University http://www.cs.brown.edu/people/ls/ http://vision.cs.brown.edu/humaneva/ Motivation
Measure Locally, Reason Globally: Occlusion-sensitive Articulated Pose Estimation
 Measure Locally, Reason Globally: Occlusion-sensitive Articulated Pose Estimation Leonid Sigal Michael J. Black Department of Computer Science, Brown University, Providence, RI 02912 {ls,black}@cs.brown.edu
Measure Locally, Reason Globally: Occlusion-sensitive Articulated Pose Estimation Leonid Sigal Michael J. Black Department of Computer Science, Brown University, Providence, RI 02912 {ls,black}@cs.brown.edu
Conditional Visual Tracking in Kernel Space
 Conditional Visual Tracking in Kernel Space Cristian Sminchisescu 1,2,3 Atul Kanujia 3 Zhiguo Li 3 Dimitris Metaxas 3 1 TTI-C, 1497 East 50th Street, Chicago, IL, 60637, USA 2 University of Toronto, Department
Conditional Visual Tracking in Kernel Space Cristian Sminchisescu 1,2,3 Atul Kanujia 3 Zhiguo Li 3 Dimitris Metaxas 3 1 TTI-C, 1497 East 50th Street, Chicago, IL, 60637, USA 2 University of Toronto, Department
Human Upper Body Pose Estimation in Static Images
 1. Research Team Human Upper Body Pose Estimation in Static Images Project Leader: Graduate Students: Prof. Isaac Cohen, Computer Science Mun Wai Lee 2. Statement of Project Goals This goal of this project
1. Research Team Human Upper Body Pose Estimation in Static Images Project Leader: Graduate Students: Prof. Isaac Cohen, Computer Science Mun Wai Lee 2. Statement of Project Goals This goal of this project
3D Human Motion Analysis and Manifolds
 D E P A R T M E N T O F C O M P U T E R S C I E N C E U N I V E R S I T Y O F C O P E N H A G E N 3D Human Motion Analysis and Manifolds Kim Steenstrup Pedersen DIKU Image group and E-Science center Motivation
D E P A R T M E N T O F C O M P U T E R S C I E N C E U N I V E R S I T Y O F C O P E N H A G E N 3D Human Motion Analysis and Manifolds Kim Steenstrup Pedersen DIKU Image group and E-Science center Motivation
Viewpoint invariant exemplar-based 3D human tracking
 Computer Vision and Image Understanding 104 (2006) 178 189 www.elsevier.com/locate/cviu Viewpoint invariant exemplar-based 3D human tracking Eng-Jon Ong *, Antonio S. Micilotta, Richard Bowden, Adrian
Computer Vision and Image Understanding 104 (2006) 178 189 www.elsevier.com/locate/cviu Viewpoint invariant exemplar-based 3D human tracking Eng-Jon Ong *, Antonio S. Micilotta, Richard Bowden, Adrian
Probabilistic Tracking and Reconstruction of 3D Human Motion in Monocular Video Sequences
 Probabilistic Tracking and Reconstruction of 3D Human Motion in Monocular Video Sequences Presentation of the thesis work of: Hedvig Sidenbladh, KTH Thesis opponent: Prof. Bill Freeman, MIT Thesis supervisors
Probabilistic Tracking and Reconstruction of 3D Human Motion in Monocular Video Sequences Presentation of the thesis work of: Hedvig Sidenbladh, KTH Thesis opponent: Prof. Bill Freeman, MIT Thesis supervisors
Evaluating Example-based Pose Estimation: Experiments on the HumanEva Sets
 Evaluating Example-based Pose Estimation: Experiments on the HumanEva Sets Ronald Poppe Human Media Interaction Group, Department of Computer Science University of Twente, Enschede, The Netherlands poppe@ewi.utwente.nl
Evaluating Example-based Pose Estimation: Experiments on the HumanEva Sets Ronald Poppe Human Media Interaction Group, Department of Computer Science University of Twente, Enschede, The Netherlands poppe@ewi.utwente.nl
People-Tracking-by-Detection and People-Detection-by-Tracking
 People-Tracking-by-Detection and People-Detection-by-Tracking Mykhaylo Andriluka Stefan Roth Bernt Schiele Computer Science Department TU Darmstadt, Germany {andriluka, sroth, schiele}@cs.tu-darmstadt.de
People-Tracking-by-Detection and People-Detection-by-Tracking Mykhaylo Andriluka Stefan Roth Bernt Schiele Computer Science Department TU Darmstadt, Germany {andriluka, sroth, schiele}@cs.tu-darmstadt.de
Graphical Models and Their Applications
 Graphical Models and Their Applications Tracking Nov 26, 2o14 Bjoern Andres & Bernt Schiele http://www.d2.mpi-inf.mpg.de/gm slides adapted from Stefan Roth @ TU Darmstadt Face Tracking Face tracking using
Graphical Models and Their Applications Tracking Nov 26, 2o14 Bjoern Andres & Bernt Schiele http://www.d2.mpi-inf.mpg.de/gm slides adapted from Stefan Roth @ TU Darmstadt Face Tracking Face tracking using
Motivation: Shortcomings of Hidden Markov Model. Ko, Youngjoong. Solution: Maximum Entropy Markov Model (MEMM)
") Motivation: Shortcomings of Hidden Markov Model Maximum Entropy Markov Models and Conditional Random Fields Ko, Youngjoong Dept. of Computer Engineering, Dong-A University Intelligent System Laboratory,
Motivation: Shortcomings of Hidden Markov Model Maximum Entropy Markov Models and Conditional Random Fields Ko, Youngjoong Dept. of Computer Engineering, Dong-A University Intelligent System Laboratory,
Inferring 3D Body Pose from Silhouettes using Activity Manifold Learning
 CVPR 4 Inferring 3D Body Pose from Silhouettes using Activity Manifold Learning Ahmed Elgammal and Chan-Su Lee Department of Computer Science, Rutgers University, New Brunswick, NJ, USA {elgammal,chansu}@cs.rutgers.edu
CVPR 4 Inferring 3D Body Pose from Silhouettes using Activity Manifold Learning Ahmed Elgammal and Chan-Su Lee Department of Computer Science, Rutgers University, New Brunswick, NJ, USA {elgammal,chansu}@cs.rutgers.edu
Bayesian Reconstruction of 3D Human Motion from Single-Camera Video
 Bayesian Reconstruction of 3D Human Motion from Single-Camera Video Nicholas R. Howe Cornell University Michael E. Leventon MIT William T. Freeman Mitsubishi Electric Research Labs Problem Background 2D
Bayesian Reconstruction of 3D Human Motion from Single-Camera Video Nicholas R. Howe Cornell University Michael E. Leventon MIT William T. Freeman Mitsubishi Electric Research Labs Problem Background 2D
Loose-limbed People: Estimating 3D Human Pose and Motion Using Non-parametric Belief Propagation
 Int J Comput Vis (2012) 98:15 48 DOI 10.1007/s11263-011-0493-4 Loose-limbed People: Estimating 3D Human Pose and Motion Using Non-parametric Belief Propagation Leonid Sigal Michael Isard Horst Haussecker
Int J Comput Vis (2012) 98:15 48 DOI 10.1007/s11263-011-0493-4 Loose-limbed People: Estimating 3D Human Pose and Motion Using Non-parametric Belief Propagation Leonid Sigal Michael Isard Horst Haussecker
Shared Kernel Information Embedding for Discriminative Inference
 Shared Kernel Information Embedding for Discriminative Inference Leonid Sigal Roland Memisevic David J. Fleet Department of Computer Science, University of Toronto {ls,roland,fleet}@cs.toronto.edu Abstract
Shared Kernel Information Embedding for Discriminative Inference Leonid Sigal Roland Memisevic David J. Fleet Department of Computer Science, University of Toronto {ls,roland,fleet}@cs.toronto.edu Abstract
Visual Motion Analysis and Tracking Part II
 Visual Motion Analysis and Tracking Part II David J Fleet and Allan D Jepson CIAR NCAP Summer School July 12-16, 16, 2005 Outline Optical Flow and Tracking: Optical flow estimation (robust, iterative refinement,
Visual Motion Analysis and Tracking Part II David J Fleet and Allan D Jepson CIAR NCAP Summer School July 12-16, 16, 2005 Outline Optical Flow and Tracking: Optical flow estimation (robust, iterative refinement,
Conditional Random People: Tracking Humans with CRFs and Grid Filters
 Conditional Random People: Tracking Humans with CRFs and Grid Filters Leonid Taycher, Gregory Shakhnarovich, David Demirdjian, and Trevor Darrell Computer Science and Artificial Intelligence Laboratory,
Conditional Random People: Tracking Humans with CRFs and Grid Filters Leonid Taycher, Gregory Shakhnarovich, David Demirdjian, and Trevor Darrell Computer Science and Artificial Intelligence Laboratory,
Multi-view Human Motion Capture with An Improved Deformation Skin Model
 Multi-view Human Motion Capture with An Improved Deformation Skin Model Yifan Lu 1, Lei Wang 1, Richard Hartley 12, Hongdong Li 12, Chunhua Shen 12 1 Department of Information Engineering, CECS, ANU 2
Multi-view Human Motion Capture with An Improved Deformation Skin Model Yifan Lu 1, Lei Wang 1, Richard Hartley 12, Hongdong Li 12, Chunhua Shen 12 1 Department of Information Engineering, CECS, ANU 2
Recognition Rate. 90 S 90 W 90 R Segment Length T
 Human Action Recognition By Sequence of Movelet Codewords Xiaolin Feng y Pietro Perona yz y California Institute of Technology, 36-93, Pasadena, CA 925, USA z Universit a dipadova, Italy fxlfeng,peronag@vision.caltech.edu
Human Action Recognition By Sequence of Movelet Codewords Xiaolin Feng y Pietro Perona yz y California Institute of Technology, 36-93, Pasadena, CA 925, USA z Universit a dipadova, Italy fxlfeng,peronag@vision.caltech.edu
Boosted Multiple Deformable Trees for Parsing Human Poses
 Boosted Multiple Deformable Trees for Parsing Human Poses Yang Wang and Greg Mori School of Computing Science Simon Fraser University Burnaby, BC, Canada {ywang12,mori}@cs.sfu.ca Abstract. Tree-structured
Boosted Multiple Deformable Trees for Parsing Human Poses Yang Wang and Greg Mori School of Computing Science Simon Fraser University Burnaby, BC, Canada {ywang12,mori}@cs.sfu.ca Abstract. Tree-structured
CS 664 Flexible Templates. Daniel Huttenlocher
 CS 664 Flexible Templates Daniel Huttenlocher Flexible Template Matching Pictorial structures Parts connected by springs and appearance models for each part Used for human bodies, faces Fischler&Elschlager,
CS 664 Flexible Templates Daniel Huttenlocher Flexible Template Matching Pictorial structures Parts connected by springs and appearance models for each part Used for human bodies, faces Fischler&Elschlager,
Reducing Particle Filtering Complexity for 3D Motion Capture using Dynamic Bayesian Networks
 Proceedings of the Twenty-Third AAAI Conference on Artificial Intelligence (2008) Reducing Particle Filtering Complexity for 3D Motion Capture using Dynamic Bayesian Networks Cédric Rose Diatélic SA INRIA
Proceedings of the Twenty-Third AAAI Conference on Artificial Intelligence (2008) Reducing Particle Filtering Complexity for 3D Motion Capture using Dynamic Bayesian Networks Cédric Rose Diatélic SA INRIA
Multi-Activity Tracking in LLE Body Pose Space
 Multi-Activity Tracking in LLE Body Pose Space Tobias Jaeggli 1, Esther Koller-Meier 1, and Luc Van Gool 1,2 1 ETH Zurich, D-ITET/BIWI, CH-8092 Zurich 2 Katholieke Universiteit Leuven, ESAT/VISICS, B-3001
Multi-Activity Tracking in LLE Body Pose Space Tobias Jaeggli 1, Esther Koller-Meier 1, and Luc Van Gool 1,2 1 ETH Zurich, D-ITET/BIWI, CH-8092 Zurich 2 Katholieke Universiteit Leuven, ESAT/VISICS, B-3001
Nonflat Observation Model and Adaptive Depth Order Estimation for 3D Human Pose Tracking
 Nonflat Observation Model and Adaptive Depth Order Estimation for 3D Human Pose Tracking Nam-Gyu Cho, Alan Yuille and Seong-Whan Lee Department of Brain and Cognitive Engineering, orea University, orea
Nonflat Observation Model and Adaptive Depth Order Estimation for 3D Human Pose Tracking Nam-Gyu Cho, Alan Yuille and Seong-Whan Lee Department of Brain and Cognitive Engineering, orea University, orea
Behaviour based particle filtering for human articulated motion tracking
 Loughborough University Institutional Repository Behaviour based particle filtering for human articulated motion tracking This item was submitted to Loughborough University's Institutional Repository by
Loughborough University Institutional Repository Behaviour based particle filtering for human articulated motion tracking This item was submitted to Loughborough University's Institutional Repository by
CS 775: Advanced Computer Graphics. Lecture 17 : Motion Capture
 CS 775: Advanced Computer Graphics Lecture 17 : History Study of human motion Leonardo da Vinci (1452 1519) History Study of human motion Edward J. Muybridge, 1830 1904 http://en.wikipedia.org/wiki/eadweard_muybridge
CS 775: Advanced Computer Graphics Lecture 17 : History Study of human motion Leonardo da Vinci (1452 1519) History Study of human motion Edward J. Muybridge, 1830 1904 http://en.wikipedia.org/wiki/eadweard_muybridge
Tracking Generic Human Motion via Fusion of Low- and High-Dimensional Approaches
 XU, CUI, ZHAO, ZHA: TRACKING GENERIC HUMAN MOTION VIA FUSION 1 Tracking Generic Human Motion via Fusion of Low- and High-Dimensional Approaches Yuandong Xu xuyd@cis.pku.edu.cn Jinshi Cui cjs@cis.pku.edu.cn
XU, CUI, ZHAO, ZHA: TRACKING GENERIC HUMAN MOTION VIA FUSION 1 Tracking Generic Human Motion via Fusion of Low- and High-Dimensional Approaches Yuandong Xu xuyd@cis.pku.edu.cn Jinshi Cui cjs@cis.pku.edu.cn
Dynamic Human Shape Description and Characterization
 Dynamic Human Shape Description and Characterization Z. Cheng*, S. Mosher, Jeanne Smith H. Cheng, and K. Robinette Infoscitex Corporation, Dayton, Ohio, USA 711 th Human Performance Wing, Air Force Research
Dynamic Human Shape Description and Characterization Z. Cheng*, S. Mosher, Jeanne Smith H. Cheng, and K. Robinette Infoscitex Corporation, Dayton, Ohio, USA 711 th Human Performance Wing, Air Force Research
Tracking Human Body Parts Using Particle Filters Constrained by Human Biomechanics
 Tracking Human Body Parts Using Particle Filters Constrained by Human Biomechanics J. Martínez 1, J.C. Nebel 2, D. Makris 2 and C. Orrite 1 1 Computer Vision Lab, University of Zaragoza, Spain 2 Digital
Tracking Human Body Parts Using Particle Filters Constrained by Human Biomechanics J. Martínez 1, J.C. Nebel 2, D. Makris 2 and C. Orrite 1 1 Computer Vision Lab, University of Zaragoza, Spain 2 Digital
Avoiding the Streetlight Effect : Tracking by Exploring Likelihood Modes
 Avoiding the Streetlight Effect : Tracking by Exploring Likelihood Modes David Demirdian, Leonid Taycher, Gregory Shakhnarovich, Kristen Grauman, and Trevor Darrell Computer Science and Artificial Intelligence
Avoiding the Streetlight Effect : Tracking by Exploring Likelihood Modes David Demirdian, Leonid Taycher, Gregory Shakhnarovich, Kristen Grauman, and Trevor Darrell Computer Science and Artificial Intelligence
Efficient Nonparametric Belief Propagation with Application to Articulated Body Tracking
 Efficient Nonparametric Belief Propagation with Application to Articulated Body Tracking Tony X. Han Huazhong Ning Thomas S. Huang Beckman Institute and ECE Department University of Illinois at Urbana-Champaign
Efficient Nonparametric Belief Propagation with Application to Articulated Body Tracking Tony X. Han Huazhong Ning Thomas S. Huang Beckman Institute and ECE Department University of Illinois at Urbana-Champaign
An Adaptive Appearance Model Approach for Model-based Articulated Object Tracking
 An Adaptive Appearance Model Approach for Model-based Articulated Object Tracking Alexandru O. Bălan Michael J. Black Department of Computer Science - Brown University Providence, RI 02912, USA {alb, black}@cs.brown.edu
An Adaptive Appearance Model Approach for Model-based Articulated Object Tracking Alexandru O. Bălan Michael J. Black Department of Computer Science - Brown University Providence, RI 02912, USA {alb, black}@cs.brown.edu
Key Developments in Human Pose Estimation for Kinect
 Key Developments in Human Pose Estimation for Kinect Pushmeet Kohli and Jamie Shotton Abstract The last few years have seen a surge in the development of natural user interfaces. These interfaces do not
Key Developments in Human Pose Estimation for Kinect Pushmeet Kohli and Jamie Shotton Abstract The last few years have seen a surge in the development of natural user interfaces. These interfaces do not
Efficient Mean Shift Belief Propagation for Vision Tracking
 Efficient Mean Shift Belief Propagation for Vision Tracking Minwoo Park, Yanxi Liu * and Robert T. Collins Department of Computer Science and Engineering, *Department of Electrical Engineering The Pennsylvania
Efficient Mean Shift Belief Propagation for Vision Tracking Minwoo Park, Yanxi Liu * and Robert T. Collins Department of Computer Science and Engineering, *Department of Electrical Engineering The Pennsylvania
Object Pose Detection in Range Scan Data
 Object Pose Detection in Range Scan Data Jim Rodgers, Dragomir Anguelov, Hoi-Cheung Pang, Daphne Koller Computer Science Department Stanford University, CA 94305 {jimkr, drago, hcpang, koller}@cs.stanford.edu
Object Pose Detection in Range Scan Data Jim Rodgers, Dragomir Anguelov, Hoi-Cheung Pang, Daphne Koller Computer Science Department Stanford University, CA 94305 {jimkr, drago, hcpang, koller}@cs.stanford.edu
Articulated Pose Estimation with Flexible Mixtures-of-Parts
 Articulated Pose Estimation with Flexible Mixtures-of-Parts PRESENTATION: JESSE DAVIS CS 3710 VISUAL RECOGNITION Outline Modeling Special Cases Inferences Learning Experiments Problem and Relevance Problem:
Articulated Pose Estimation with Flexible Mixtures-of-Parts PRESENTATION: JESSE DAVIS CS 3710 VISUAL RECOGNITION Outline Modeling Special Cases Inferences Learning Experiments Problem and Relevance Problem:
Visual Tracking of Human Body with Deforming Motion and Shape Average
 Visual Tracking of Human Body with Deforming Motion and Shape Average Alessandro Bissacco UCLA Computer Science Los Angeles, CA 90095 bissacco@cs.ucla.edu UCLA CSD-TR # 020046 Abstract In this work we
Visual Tracking of Human Body with Deforming Motion and Shape Average Alessandro Bissacco UCLA Computer Science Los Angeles, CA 90095 bissacco@cs.ucla.edu UCLA CSD-TR # 020046 Abstract In this work we
Semi-supervised Learning of Joint Density Models for Human Pose Estimation
 Semi-supervised Learning of Joint Density Models for Human Pose Estimation Ramanan Navaratnam Andrew Fitzgibbon Roberto Cipolla University of Cambridge Department of Engineering Cambridge, CB2 PZ, UK http://mi.eng.cam.ac.uk/
Semi-supervised Learning of Joint Density Models for Human Pose Estimation Ramanan Navaratnam Andrew Fitzgibbon Roberto Cipolla University of Cambridge Department of Engineering Cambridge, CB2 PZ, UK http://mi.eng.cam.ac.uk/
Semi-Supervised Hierarchical Models for 3D Human Pose Reconstruction
 Semi-Supervised Hierarchical Models for 3D Human Pose Reconstruction Atul Kanaujia, CBIM, Rutgers Cristian Sminchisescu, TTI-C Dimitris Metaxas,CBIM, Rutgers 3D Human Pose Inference Difficulties Towards
Semi-Supervised Hierarchical Models for 3D Human Pose Reconstruction Atul Kanaujia, CBIM, Rutgers Cristian Sminchisescu, TTI-C Dimitris Metaxas,CBIM, Rutgers 3D Human Pose Inference Difficulties Towards
A novel approach to motion tracking with wearable sensors based on Probabilistic Graphical Models
 A novel approach to motion tracking with wearable sensors based on Probabilistic Graphical Models Emanuele Ruffaldi Lorenzo Peppoloni Alessandro Filippeschi Carlo Alberto Avizzano 2014 IEEE International
A novel approach to motion tracking with wearable sensors based on Probabilistic Graphical Models Emanuele Ruffaldi Lorenzo Peppoloni Alessandro Filippeschi Carlo Alberto Avizzano 2014 IEEE International
Learning Joint Top-Down and Bottom-up Processes for 3D Visual Inference
 Learning Joint Top-Down and Bottom-up Processes for 3D Visual Inference Cristian Sminchisescu TTI-C crismin@nagoya.uchicago.edu http://ttic.uchicago.edu/ crismin Atul Kanaujia and Dimitris Metaxas Rutgers
Learning Joint Top-Down and Bottom-up Processes for 3D Visual Inference Cristian Sminchisescu TTI-C crismin@nagoya.uchicago.edu http://ttic.uchicago.edu/ crismin Atul Kanaujia and Dimitris Metaxas Rutgers
Computer Vision II Lecture 14
 Computer Vision II Lecture 14 Articulated Tracking I 08.07.2014 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Outline of This Lecture Single-Object Tracking Bayesian
Computer Vision II Lecture 14 Articulated Tracking I 08.07.2014 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Outline of This Lecture Single-Object Tracking Bayesian
An Efficient Message Passing Algorithm for Multi-Target Tracking
 An Efficient Message Passing Algorithm for Multi-Target Tracking Zhexu (Michael) Chen a, Lei Chen a, Müjdat Çetin b,a, and Alan S. Willsky a a Laboratory for Information and Decision Systems, MIT, Cambridge,
An Efficient Message Passing Algorithm for Multi-Target Tracking Zhexu (Michael) Chen a, Lei Chen a, Müjdat Çetin b,a, and Alan S. Willsky a a Laboratory for Information and Decision Systems, MIT, Cambridge,
Reducing Particle Filtering Complexity for 3D Motion Capture using Dynamic Bayesian Networks
 Reducing Particle Filtering Complexity for 3D Motion Capture using Dynamic Bayesian Networks Cédric Rose, Jamal Saboune, François Charpillet To cite this version: Cédric Rose, Jamal Saboune, François Charpillet.
Reducing Particle Filtering Complexity for 3D Motion Capture using Dynamic Bayesian Networks Cédric Rose, Jamal Saboune, François Charpillet To cite this version: Cédric Rose, Jamal Saboune, François Charpillet.
Robust Human Body Shape and Pose Tracking
 Robust Human Body Shape and Pose Tracking Chun-Hao Huang 1 Edmond Boyer 2 Slobodan Ilic 1 1 Technische Universität München 2 INRIA Grenoble Rhône-Alpes Marker-based motion capture (mocap.) Adventages:
Robust Human Body Shape and Pose Tracking Chun-Hao Huang 1 Edmond Boyer 2 Slobodan Ilic 1 1 Technische Universität München 2 INRIA Grenoble Rhône-Alpes Marker-based motion capture (mocap.) Adventages:
3D Pictorial Structures for Multiple Human Pose Estimation
 3D Pictorial Structures for Multiple Human Pose Estimation Vasileios Belagiannis 1, Sikandar Amin 2,3, Mykhaylo Andriluka 3, Bernt Schiele 3, Nassir Navab 1, and Slobodan Ilic 1 1 Computer Aided Medical
3D Pictorial Structures for Multiple Human Pose Estimation Vasileios Belagiannis 1, Sikandar Amin 2,3, Mykhaylo Andriluka 3, Bernt Schiele 3, Nassir Navab 1, and Slobodan Ilic 1 1 Computer Aided Medical
2D Articulated Tracking With Dynamic Bayesian Networks
 2D Articulated Tracking With Dynamic Bayesian Networks Chunhua Shen, Anton van den Hengel, Anthony Dick, Michael J. Brooks School of Computer Science, The University of Adelaide, SA 5005, Australia {chhshen,anton,ard,mjb}@cs.adelaide.edu.au
2D Articulated Tracking With Dynamic Bayesian Networks Chunhua Shen, Anton van den Hengel, Anthony Dick, Michael J. Brooks School of Computer Science, The University of Adelaide, SA 5005, Australia {chhshen,anton,ard,mjb}@cs.adelaide.edu.au
Learning the Structure of Sum-Product Networks. Robert Gens Pedro Domingos
 Learning the Structure of Sum-Product Networks Robert Gens Pedro Domingos w 20 10x O(n) X Y LL PLL CLL CMLL Motivation SPN Structure Experiments Review Learning Graphical Models Representation Inference
Learning the Structure of Sum-Product Networks Robert Gens Pedro Domingos w 20 10x O(n) X Y LL PLL CLL CMLL Motivation SPN Structure Experiments Review Learning Graphical Models Representation Inference
Gaussian Process Motion Graph Models for Smooth Transitions among Multiple Actions
 Gaussian Process Motion Graph Models for Smooth Transitions among Multiple Actions Norimichi Ukita 1 and Takeo Kanade Graduate School of Information Science, Nara Institute of Science and Technology The
Gaussian Process Motion Graph Models for Smooth Transitions among Multiple Actions Norimichi Ukita 1 and Takeo Kanade Graduate School of Information Science, Nara Institute of Science and Technology The
Optimization and Learning Algorithms for Visual Inference
 Optimization and Learning Algorithms for Visual Inference 3D Human Motion Reconstruction in Monocular Video Cristian Sminchisescu TTI-C / University of Toronto / Rutgers University crismin@cs.toronto.edu
Optimization and Learning Algorithms for Visual Inference 3D Human Motion Reconstruction in Monocular Video Cristian Sminchisescu TTI-C / University of Toronto / Rutgers University crismin@cs.toronto.edu
Efficient Human Pose Estimation via Parsing a Tree Structure Based Human Model
 Efficient Human Pose Estimation via Parsing a Tree Structure Based Human Model Xiaoqin Zhang 1,Changcheng Li 2, Xiaofeng Tong 3,Weiming Hu 1,Steve Maybank 4,Yimin Zhang 3 1 National Laboratory of Pattern
Efficient Human Pose Estimation via Parsing a Tree Structure Based Human Model Xiaoqin Zhang 1,Changcheng Li 2, Xiaofeng Tong 3,Weiming Hu 1,Steve Maybank 4,Yimin Zhang 3 1 National Laboratory of Pattern
Local Gaussian Processes for Pose Recognition from Noisy Inputs
 FERGIE, GALATA: LOCAL GAUSSIAN PROCESS REGRESSION WITH NOISY INPUTS 1 Local Gaussian Processes for Pose Recognition from Noisy Inputs Martin Fergie mfergie@cs.man.ac.uk Aphrodite Galata a.galata@cs.man.ac.uk
FERGIE, GALATA: LOCAL GAUSSIAN PROCESS REGRESSION WITH NOISY INPUTS 1 Local Gaussian Processes for Pose Recognition from Noisy Inputs Martin Fergie mfergie@cs.man.ac.uk Aphrodite Galata a.galata@cs.man.ac.uk
Learning Switching Linear Models of Human Motion
 To appear in Neural Information Processing Systems 13, MIT Press, Cambridge, MA Learning Switching Linear Models of Human Motion Vladimir Pavlović and James M. Rehg Compaq - Cambridge Research Lab Cambridge,
To appear in Neural Information Processing Systems 13, MIT Press, Cambridge, MA Learning Switching Linear Models of Human Motion Vladimir Pavlović and James M. Rehg Compaq - Cambridge Research Lab Cambridge,
3D Tracking for Gait Characterization and Recognition
 3D Tracking for Gait Characterization and Recognition Raquel Urtasun and Pascal Fua Computer Vision Laboratory EPFL Lausanne, Switzerland raquel.urtasun, pascal.fua@epfl.ch Abstract We propose an approach
3D Tracking for Gait Characterization and Recognition Raquel Urtasun and Pascal Fua Computer Vision Laboratory EPFL Lausanne, Switzerland raquel.urtasun, pascal.fua@epfl.ch Abstract We propose an approach
Structured Models in. Dan Huttenlocher. June 2010
 Structured Models in Computer Vision i Dan Huttenlocher June 2010 Structured Models Problems where output variables are mutually dependent or constrained E.g., spatial or temporal relations Such dependencies
Structured Models in Computer Vision i Dan Huttenlocher June 2010 Structured Models Problems where output variables are mutually dependent or constrained E.g., spatial or temporal relations Such dependencies
Chapter 8 of Bishop's Book: Graphical Models
 Chapter 8 of Bishop's Book: Graphical Models Review of Probability Probability density over possible values of x Used to find probability of x falling in some range For continuous variables, the probability
Chapter 8 of Bishop's Book: Graphical Models Review of Probability Probability density over possible values of x Used to find probability of x falling in some range For continuous variables, the probability
Human Context: Modeling human-human interactions for monocular 3D pose estimation
 Human Context: Modeling human-human interactions for monocular 3D pose estimation Mykhaylo Andriluka Leonid Sigal Max Planck Institute for Informatics, Saarbrücken, Germany Disney Research, Pittsburgh,
Human Context: Modeling human-human interactions for monocular 3D pose estimation Mykhaylo Andriluka Leonid Sigal Max Planck Institute for Informatics, Saarbrücken, Germany Disney Research, Pittsburgh,
Learning Articulated Skeletons From Motion
 Learning Articulated Skeletons From Motion Danny Tarlow University of Toronto, Machine Learning with David Ross and Richard Zemel (and Brendan Frey) August 6, 2007 Point Light Displays It's easy for humans
Learning Articulated Skeletons From Motion Danny Tarlow University of Toronto, Machine Learning with David Ross and Richard Zemel (and Brendan Frey) August 6, 2007 Point Light Displays It's easy for humans
Learning to Track 3D Human Motion from Silhouettes
 Learning to Track 3D Human Motion from Silhouettes Ankur Agarwal Bill Triggs GRAVIR-INRIA-CNRS, 655 Avenue de l Europe, Montbonnot 3833, France ANKUR.AGARWAL@INRIALPES.FR BILL.TRIGGS@INRIALPES.FR Abstract
Learning to Track 3D Human Motion from Silhouettes Ankur Agarwal Bill Triggs GRAVIR-INRIA-CNRS, 655 Avenue de l Europe, Montbonnot 3833, France ANKUR.AGARWAL@INRIALPES.FR BILL.TRIGGS@INRIALPES.FR Abstract
HUMAN TRACKING AND POSE ESTIMATION IN VIDEO SURVEILLANCE SYSTEM
 International Journal of Computer Science Engineering and Information Technology Research (IJCSEITR) ISSN 2249-6831 Vol. 3, Issue 3, Aug 2013, 267-274 TJPRC Pvt. Ltd. HUMAN TRACKING AND POSE ESTIMATION
International Journal of Computer Science Engineering and Information Technology Research (IJCSEITR) ISSN 2249-6831 Vol. 3, Issue 3, Aug 2013, 267-274 TJPRC Pvt. Ltd. HUMAN TRACKING AND POSE ESTIMATION
Estimation of Human Figure Motion Using Robust Tracking of Articulated Layers
 Estimation of Human Figure Motion Using Robust Tracking of Articulated Layers Kooksang Moon and Vladimir Pavlović Department of Computer Science Rutgers University Piscataway, NJ 08854 Abstract We propose
Estimation of Human Figure Motion Using Robust Tracking of Articulated Layers Kooksang Moon and Vladimir Pavlović Department of Computer Science Rutgers University Piscataway, NJ 08854 Abstract We propose
and we can apply the recursive definition of the cost-to-go function to get
 Section 20.2 Parsing People in Images 602 and we can apply the recursive definition of the cost-to-go function to get argmax f X 1,...,X n chain (X 1,...,X n ) = argmax ( ) f X 1 chain (X 1 )+fcost-to-go
Section 20.2 Parsing People in Images 602 and we can apply the recursive definition of the cost-to-go function to get argmax f X 1,...,X n chain (X 1,...,X n ) = argmax ( ) f X 1 chain (X 1 )+fcost-to-go
CS 775: Advanced Computer Graphics. Lecture 8 : Motion Capture
 CS 775: Advanced Computer Graphics Lecture 8 : History Study of human motion Leonardo da Vinci (1452 1519) History Study of human motion Edward J. Muybridge, 1830 1904 http://en.wikipedia.org/wiki/eadweard_muybridge
CS 775: Advanced Computer Graphics Lecture 8 : History Study of human motion Leonardo da Vinci (1452 1519) History Study of human motion Edward J. Muybridge, 1830 1904 http://en.wikipedia.org/wiki/eadweard_muybridge
Nonparametric Facial Feature Localization
 2013 IEEE Conference on Computer Vision and Pattern Recognition Workshops Nonparametric Facial Feature Localization Birgi Tamersoy birgi@utexas.edu Changbo Hu changbo.hu@gmail.com Computer and Vision Research
2013 IEEE Conference on Computer Vision and Pattern Recognition Workshops Nonparametric Facial Feature Localization Birgi Tamersoy birgi@utexas.edu Changbo Hu changbo.hu@gmail.com Computer and Vision Research
Monocular Human Motion Capture with a Mixture of Regressors. Ankur Agarwal and Bill Triggs GRAVIR-INRIA-CNRS, Grenoble, France
 Monocular Human Motion Capture with a Mixture of Regressors Ankur Agarwal and Bill Triggs GRAVIR-INRIA-CNRS, Grenoble, France IEEE Workshop on Vision for Human-Computer Interaction, 21 June 2005 Visual
Monocular Human Motion Capture with a Mixture of Regressors Ankur Agarwal and Bill Triggs GRAVIR-INRIA-CNRS, Grenoble, France IEEE Workshop on Vision for Human-Computer Interaction, 21 June 2005 Visual
Monocular Virtual Trajectory Estimation with Dynamical Primitives
 Monocular Virtual Trajectory Estimation with Dynamical Primitives Odest Chadwicke Jenkins, Germán González, Matthew M. Loper Department of Computer Science Brown University Providence, RI 02912-1910 cjenkins,gerg,matt@cs.brown.edu
Monocular Virtual Trajectory Estimation with Dynamical Primitives Odest Chadwicke Jenkins, Germán González, Matthew M. Loper Department of Computer Science Brown University Providence, RI 02912-1910 cjenkins,gerg,matt@cs.brown.edu
Conditional Random Fields for Object Recognition
 Conditional Random Fields for Object Recognition Ariadna Quattoni Michael Collins Trevor Darrell MIT Computer Science and Artificial Intelligence Laboratory Cambridge, MA 02139 {ariadna, mcollins, trevor}@csail.mit.edu
Conditional Random Fields for Object Recognition Ariadna Quattoni Michael Collins Trevor Darrell MIT Computer Science and Artificial Intelligence Laboratory Cambridge, MA 02139 {ariadna, mcollins, trevor}@csail.mit.edu
Analysis of Goal-directed Manipulation in Clutter using Scene Graph Belief Propagation
 Analysis of Goal-directed Manipulation in Clutter using Scene Graph Belief Propagation Karthik Desingh Anthony Opipari Odest Chadwicke Jenkins Abstract Goal-directed manipulation requires a robot to perform
Analysis of Goal-directed Manipulation in Clutter using Scene Graph Belief Propagation Karthik Desingh Anthony Opipari Odest Chadwicke Jenkins Abstract Goal-directed manipulation requires a robot to perform
Priors for People Tracking from Small Training Sets Λ
 Priors for People Tracking from Small Training Sets Λ Raquel Urtasun CVLab EPFL, Lausanne Switzerland David J. Fleet Computer Science Dept. University of Toronto Canada Aaron Hertzmann Computer Science
Priors for People Tracking from Small Training Sets Λ Raquel Urtasun CVLab EPFL, Lausanne Switzerland David J. Fleet Computer Science Dept. University of Toronto Canada Aaron Hertzmann Computer Science
18 October, 2013 MVA ENS Cachan. Lecture 6: Introduction to graphical models Iasonas Kokkinos
 Machine Learning for Computer Vision 1 18 October, 2013 MVA ENS Cachan Lecture 6: Introduction to graphical models Iasonas Kokkinos Iasonas.kokkinos@ecp.fr Center for Visual Computing Ecole Centrale Paris
Machine Learning for Computer Vision 1 18 October, 2013 MVA ENS Cachan Lecture 6: Introduction to graphical models Iasonas Kokkinos Iasonas.kokkinos@ecp.fr Center for Visual Computing Ecole Centrale Paris
Multi-camera Tracking of Articulated Human Motion Using Motion and Shape Cues
 Multi-camera Tracking of Articulated Human Motion Using Motion and Shape Cues Aravind Sundaresan and Rama Chellappa Department of Electrical and Computer Engineering, University of Maryland, College Park,
Multi-camera Tracking of Articulated Human Motion Using Motion and Shape Cues Aravind Sundaresan and Rama Chellappa Department of Electrical and Computer Engineering, University of Maryland, College Park,
Coupled Visual and Kinematic Manifold Models for Tracking
 Int J Comput Vis (2010) 87: 118 139 DOI 10.1007/s11263-009-0266-5 Coupled Visual and Kinematic Manifold Models for Tracking C.-S. Lee A. Elgammal Received: 13 January 2008 / Accepted: 29 June 2009 / Published
Int J Comput Vis (2010) 87: 118 139 DOI 10.1007/s11263-009-0266-5 Coupled Visual and Kinematic Manifold Models for Tracking C.-S. Lee A. Elgammal Received: 13 January 2008 / Accepted: 29 June 2009 / Published
Tracking Articulated Bodies using Generalized Expectation Maximization
 Tracking Articulated Bodies using Generalized Expectation Maximization A. Fossati CVLab EPFL, Switzerland andrea.fossati@epfl.ch E. Arnaud Université Joseph Fourier INRIA Rhone-Alpes, France elise.arnaud@inrialpes.fr
Tracking Articulated Bodies using Generalized Expectation Maximization A. Fossati CVLab EPFL, Switzerland andrea.fossati@epfl.ch E. Arnaud Université Joseph Fourier INRIA Rhone-Alpes, France elise.arnaud@inrialpes.fr
Model-free Viewpoint Invariant Human Activity Recognition
 Model-free Viewpoint Invariant Human Activity Recognition Zaw Zaw Htike, Simon Egerton, Kuang Ye Chow Abstract The viewpoint assumption is becoming an obstacle in human activity recognition systems. There
Model-free Viewpoint Invariant Human Activity Recognition Zaw Zaw Htike, Simon Egerton, Kuang Ye Chow Abstract The viewpoint assumption is becoming an obstacle in human activity recognition systems. There
Pose Estimation on Depth Images with Convolutional Neural Network
 Pose Estimation on Depth Images with Convolutional Neural Network Jingwei Huang Stanford University jingweih@stanford.edu David Altamar Stanford University daltamar@stanford.edu Abstract In this paper
Pose Estimation on Depth Images with Convolutional Neural Network Jingwei Huang Stanford University jingweih@stanford.edu David Altamar Stanford University daltamar@stanford.edu Abstract In this paper
A Joint Model for 2D and 3D Pose Estimation from a Single Image
 A Joint Model for 2D and 3D Pose Estimation from a Single Image E. Simo-Serra 1, A. Quattoni 2, C. Torras 1, F. Moreno-Noguer 1 1 Institut de Robòtica i Informàtica Industrial (CSIC-UPC), Barcelona, Spain
A Joint Model for 2D and 3D Pose Estimation from a Single Image E. Simo-Serra 1, A. Quattoni 2, C. Torras 1, F. Moreno-Noguer 1 1 Institut de Robòtica i Informàtica Industrial (CSIC-UPC), Barcelona, Spain
Learning to Estimate Human Pose with Data Driven Belief Propagation
 Learning to Estimate Human Pose with Data Driven Belief Propagation Gang Hua Ming-Hsuan Yang Ying Wu ECE Department, Northwestern University Honda Research Institute Evanston, IL 60208, U.S.A. Mountain
Learning to Estimate Human Pose with Data Driven Belief Propagation Gang Hua Ming-Hsuan Yang Ying Wu ECE Department, Northwestern University Honda Research Institute Evanston, IL 60208, U.S.A. Mountain
3D Pose Estimation from a Single Monocular Image
 COMPUTER GRAPHICS TECHNICAL REPORTS CG-2015-1 arxiv:1509.06720v1 [cs.cv] 22 Sep 2015 3D Pose Estimation from a Single Monocular Image Hashim Yasin yasin@cs.uni-bonn.de Institute of Computer Science II
COMPUTER GRAPHICS TECHNICAL REPORTS CG-2015-1 arxiv:1509.06720v1 [cs.cv] 22 Sep 2015 3D Pose Estimation from a Single Monocular Image Hashim Yasin yasin@cs.uni-bonn.de Institute of Computer Science II
A Joint Model for 2D and 3D Pose Estimation from a Single Image
 213 IEEE Conference on Computer Vision and Pattern Recognition A Joint Model for 2D and 3D Pose Estimation from a Single Image E. Simo-Serra 1, A. Quattoni 2, C. Torras 1, F. Moreno-Noguer 1 1 Institut
213 IEEE Conference on Computer Vision and Pattern Recognition A Joint Model for 2D and 3D Pose Estimation from a Single Image E. Simo-Serra 1, A. Quattoni 2, C. Torras 1, F. Moreno-Noguer 1 1 Institut
IMA Preprint Series # 2154
 A GRAPH-BASED FOREGROUND REPRESENTATION AND ITS APPLICATION IN EXAMPLE BASED PEOPLE MATCHING IN VIDEO By Kedar A. Patwardhan Guillermo Sapiro and Vassilios Morellas IMA Preprint Series # 2154 ( January
A GRAPH-BASED FOREGROUND REPRESENTATION AND ITS APPLICATION IN EXAMPLE BASED PEOPLE MATCHING IN VIDEO By Kedar A. Patwardhan Guillermo Sapiro and Vassilios Morellas IMA Preprint Series # 2154 ( January
Contents. 1 Introduction 2
 Contents 1 Introduction 2 2 Tracking: Fundamental Notions 2 2.1 Tracking by detection........................................ 2 2.2 Tracking using Flow........................................ 2 2.3 Flow
Contents 1 Introduction 2 2 Tracking: Fundamental Notions 2 2.1 Tracking by detection........................................ 2 2.2 Tracking using Flow........................................ 2 2.3 Flow
Modeling pigeon behaviour using a Conditional Restricted Boltzmann Machine
 Modeling pigeon behaviour using a Conditional Restricted Boltzmann Machine Matthew D. Zeiler 1,GrahamW.Taylor 1, Nikolaus F. Troje 2 and Geoffrey E. Hinton 1 1- University of Toronto - Dept. of Computer
Modeling pigeon behaviour using a Conditional Restricted Boltzmann Machine Matthew D. Zeiler 1,GrahamW.Taylor 1, Nikolaus F. Troje 2 and Geoffrey E. Hinton 1 1- University of Toronto - Dept. of Computer
Learning Silhouette Features for Control of Human Motion
 Learning Silhouette Features for Control of Human Motion Liu Ren 1, Gregory Shakhnarovich 2, Jessica K. Hodgins 1 Hanspeter Pfister 3, Paul A. Viola 4 July 2004 CMU-CS-04-165 School of Computer Science
Learning Silhouette Features for Control of Human Motion Liu Ren 1, Gregory Shakhnarovich 2, Jessica K. Hodgins 1 Hanspeter Pfister 3, Paul A. Viola 4 July 2004 CMU-CS-04-165 School of Computer Science
Automatic Tracking of Moving Objects in Video for Surveillance Applications
 Automatic Tracking of Moving Objects in Video for Surveillance Applications Manjunath Narayana Committee: Dr. Donna Haverkamp (Chair) Dr. Arvin Agah Dr. James Miller Department of Electrical Engineering
Automatic Tracking of Moving Objects in Video for Surveillance Applications Manjunath Narayana Committee: Dr. Donna Haverkamp (Chair) Dr. Arvin Agah Dr. James Miller Department of Electrical Engineering
Tracking in Action Space
 Tracking in Action Space Dennis L. Herzog, and Volker Krüger Copenhagen Institute of Technology, Aalborg University, Lautrupvang 2, 2750 Ballerup, Denmark {deh,vok}@cvmi.aau.dk Abstract. The recognition
Tracking in Action Space Dennis L. Herzog, and Volker Krüger Copenhagen Institute of Technology, Aalborg University, Lautrupvang 2, 2750 Ballerup, Denmark {deh,vok}@cvmi.aau.dk Abstract. The recognition
People Tracking with the Laplacian Eigenmaps Latent Variable Model
 People Tracking with the Laplacian Eigenmaps Latent Variable Model Zhengdong Lu CSEE, OGI, OHSU zhengdon@csee.ogi.edu Miguel Á. Carreira-Perpiñán EECS, UC Merced http://eecs.ucmerced.edu Cristian Sminchisescu
People Tracking with the Laplacian Eigenmaps Latent Variable Model Zhengdong Lu CSEE, OGI, OHSU zhengdon@csee.ogi.edu Miguel Á. Carreira-Perpiñán EECS, UC Merced http://eecs.ucmerced.edu Cristian Sminchisescu
International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Vol. XXXIV-5/W10
 BUNDLE ADJUSTMENT FOR MARKERLESS BODY TRACKING IN MONOCULAR VIDEO SEQUENCES Ali Shahrokni, Vincent Lepetit, Pascal Fua Computer Vision Lab, Swiss Federal Institute of Technology (EPFL) ali.shahrokni,vincent.lepetit,pascal.fua@epfl.ch
BUNDLE ADJUSTMENT FOR MARKERLESS BODY TRACKING IN MONOCULAR VIDEO SEQUENCES Ali Shahrokni, Vincent Lepetit, Pascal Fua Computer Vision Lab, Swiss Federal Institute of Technology (EPFL) ali.shahrokni,vincent.lepetit,pascal.fua@epfl.ch
Motion Capture. Motion Capture in Movies. Motion Capture in Games
 Motion Capture Motion Capture in Movies 2 Motion Capture in Games 3 4 Magnetic Capture Systems Tethered Sensitive to metal Low frequency (60Hz) Mechanical Capture Systems Any environment Measures joint
Motion Capture Motion Capture in Movies 2 Motion Capture in Games 3 4 Magnetic Capture Systems Tethered Sensitive to metal Low frequency (60Hz) Mechanical Capture Systems Any environment Measures joint
Human Pose Estimation Using Consistent Max-Covering
 Human Pose Estimation Using Consistent Max-Covering Hao Jiang Computer Science Department, Boston College Chestnut Hill, MA 2467, USA hjiang@cs.bc.edu Abstract We propose a novel consistent max-covering
Human Pose Estimation Using Consistent Max-Covering Hao Jiang Computer Science Department, Boston College Chestnut Hill, MA 2467, USA hjiang@cs.bc.edu Abstract We propose a novel consistent max-covering
A Dynamic Human Model using Hybrid 2D-3D Representations in Hierarchical PCA Space
 A Dynamic Human Model using Hybrid 2D-3D Representations in Hierarchical PCA Space Eng-Jon Ong and Shaogang Gong Department of Computer Science, Queen Mary and Westfield College, London E1 4NS, UK fongej
A Dynamic Human Model using Hybrid 2D-3D Representations in Hierarchical PCA Space Eng-Jon Ong and Shaogang Gong Department of Computer Science, Queen Mary and Westfield College, London E1 4NS, UK fongej
D-Separation. b) the arrows meet head-to-head at the node, and neither the node, nor any of its descendants, are in the set C.
 the arrows meet head-to-head at the node, and neither the node, nor any of its descendants, are in the set C.") D-Separation Say: A, B, and C are non-intersecting subsets of nodes in a directed graph. A path from A to B is blocked by C if it contains a node such that either a) the arrows on the path meet either
D-Separation Say: A, B, and C are non-intersecting subsets of nodes in a directed graph. A path from A to B is blocked by C if it contains a node such that either a) the arrows on the path meet either
Modeling 3D Human Poses from Uncalibrated Monocular Images
 Modeling 3D Human Poses from Uncalibrated Monocular Images Xiaolin K. Wei Texas A&M University xwei@cse.tamu.edu Jinxiang Chai Texas A&M University jchai@cse.tamu.edu Abstract This paper introduces an
Modeling 3D Human Poses from Uncalibrated Monocular Images Xiaolin K. Wei Texas A&M University xwei@cse.tamu.edu Jinxiang Chai Texas A&M University jchai@cse.tamu.edu Abstract This paper introduces an
Markerless human motion capture through visual hull and articulated ICP
 Markerless human motion capture through visual hull and articulated ICP Lars Mündermann lmuender@stanford.edu Stefano Corazza Stanford, CA 93405 stefanoc@stanford.edu Thomas. P. Andriacchi Bone and Joint
Markerless human motion capture through visual hull and articulated ICP Lars Mündermann lmuender@stanford.edu Stefano Corazza Stanford, CA 93405 stefanoc@stanford.edu Thomas. P. Andriacchi Bone and Joint
Sum-Product Networks. STAT946 Deep Learning Guest Lecture by Pascal Poupart University of Waterloo October 15, 2015
 Sum-Product Networks STAT946 Deep Learning Guest Lecture by Pascal Poupart University of Waterloo October 15, 2015 Introduction Outline What is a Sum-Product Network? Inference Applications In more depth
Sum-Product Networks STAT946 Deep Learning Guest Lecture by Pascal Poupart University of Waterloo October 15, 2015 Introduction Outline What is a Sum-Product Network? Inference Applications In more depth
Structured Output-Associative Regression
 IEEE International Conference on Computer Vision and Pattern Recognition, CVPR 009, Florida Structured Output-Associative Regression Liefeng Bo Toyota Technological Institute at Chicago, USA blf08@tti-c.org
IEEE International Conference on Computer Vision and Pattern Recognition, CVPR 009, Florida Structured Output-Associative Regression Liefeng Bo Toyota Technological Institute at Chicago, USA blf08@tti-c.org
Dynamic Bayesian network (DBN)
") Readings: K&F: 18.1, 18.2, 18.3, 18.4 ynamic Bayesian Networks Beyond 10708 Graphical Models 10708 Carlos Guestrin Carnegie Mellon University ecember 1 st, 2006 1 ynamic Bayesian network (BN) HMM defined
Readings: K&F: 18.1, 18.2, 18.3, 18.4 ynamic Bayesian Networks Beyond 10708 Graphical Models 10708 Carlos Guestrin Carnegie Mellon University ecember 1 st, 2006 1 ynamic Bayesian network (BN) HMM defined
Conditional Random People: Tracking Humans with CRFs and Grid Filters Leonid Taycher, Gregory Shakhnarovich, David Demirdjian, Trevor Darrell
 Computer Science and Artificial Intelligence Laboratory Technical Report MIT-CSAIL-TR-25-79 AIM-25-34 December 1, 25 Conditional Random People: Tracking Humans with CRFs and Grid Filters Leonid Taycher,
Computer Science and Artificial Intelligence Laboratory Technical Report MIT-CSAIL-TR-25-79 AIM-25-34 December 1, 25 Conditional Random People: Tracking Humans with CRFs and Grid Filters Leonid Taycher,
Variational Mixture Smoothing for Non-Linear Dynamical Systems
 Appearing in Proceedings IEEE Conference on Computer Vision and Pattern Recognition 2004 Washington D.C. Variational Mixture Smoothing for Non-Linear Dynamical Systems Cristian Sminchisescu Allan Jepson
Appearing in Proceedings IEEE Conference on Computer Vision and Pattern Recognition 2004 Washington D.C. Variational Mixture Smoothing for Non-Linear Dynamical Systems Cristian Sminchisescu Allan Jepson