Human Pose Estimation Using Consistent Max-Covering
|
|
|
- Steven Paul
- 5 years ago
- Views:
Transcription
1 Human Pose Estimation Using Consistent Max-Covering Hao Jiang Computer Science Department, Boston College Chestnut Hill, MA 2467, USA Abstract We propose a novel consistent max-covering scheme for human pose estimation. Consistent max-covering formulates pose estimation as the covering of body part polygons on an object silhouette so that the body part tiles maximally cover the foreground, match local image features, and satisfy body linkage plan and color constraints. It uses high order constraints to anchor multiple body parts simultaneously; the hyper-edges in the part relation graph are essential for detecting complex poses. Because of using multiple clues in pose estimation, this method is resistant to cluttered foregrounds. We propose an efficient linear relaxation method to solve the consistent max-covering problem. Experiments on a variety of images and videos show that the proposed method is more robust than locally constrained methods for human pose estimation. 1. Introduction Human pose estimation has been receiving a lot of interest because of its potential important applications in surveillance and human computer interaction. In such applications rough object silhouettes can often be obtained using simple methods such as background subtraction or color segmentation. In this paper, we propose a novel consistent max-covering scheme and efficient linear method to integrate object foreground map with other image features and body plan constraint to achieve reliable pose estimation. Silhouettes have been used as a direct input in human pose estimation. For simple poses with little self-occlusion, rough body configuration can be extracted by skeleton operation on clean silhouettes [1]. Machine learning methods have also been studied for pose inference using silhouettes [2, 3]. Because of the large variety of human poses, pose regression is a hard problem. Learning methods have to process high dimensional input data and very large training sets. Dimensionality reduction methods such as probabilistic principal component analysis [4], manifold learning [5] and Gaussian process dynamical model [6] have been used to relieve the dimension explosion problem. These methods are currently used for restricted classes of poses and work with clean silhouettes. Shape matching methods have also been used in pose estimation [7, 8, 9]. They match silhouettes or edge maps and are more resistant to clutter. For free-style poses, shape matching methods have high complexity because they have to search through a huge exemplar database. Apart from the aforementioned top-down approaches, bottom-up pose estimation methods have also been intensively studied. In the bottom-up methods, body part candidates are first detected and then assembled to fit image observations and a body plan. This approach is most related to our method. With silhouettes, an efficient pose estimation method [1] has been studied based on tree model and posterior sampling. This method is resistant to foreground clutter. One difficulty of this formulation is the over-counting problem, which happens when multiple body parts occupy the same pixel in an image. Other stochastic searching methods [11, 12] and dynamic programming [13, 14] have also been used in pose optimization. Non-tree methods have recently been proposed to facilitate stronger structure constraints. They are optimized using convex programming [15, 17] or belief propagation [18]. Previous body part assembly methods use local pairwise constraints and do not have mechanisms to control the global structure. For complex poses, local information is not sufficient to yield a correct pose estimation. In this paper, we follow the body part assembly scheme and propose a novel consistent max-covering method for human pose estimation. In such a formulation, pose estimation becomes the problem of covering an object foreground map with a bunch of body part tiles. These tiles maximally cover the foreground, match image local appearance and are consistent in terms of the body linkage plan and other symmetry constraints. Max-covering with consistent constraint is denoted as consistent max-covering. It introduces high order relations among all the body parts since each body part may influence others when forming a covering. The high order body part correlation is essential for finding complex poses when self-occlusions or other part interactions IEEE 12th International Conference on Computer Vision (ICCV) /9/$ IEEE
2 occur. This method also solves the over-counting problem since we explicitly express the overall coverage of a body part assembly. We propose a linear formulation which can be efficiently solved using a relaxation method. Using multiple clues in pose estimation, the proposed method is resistant to occlusion and works with low quality silhouette or soft object foreground mask. Experiments on a variety of images and videos show that the proposed method is robust and efficient in human pose estimation. 2. Pose Estimation by Consistent Max- Covering Given an object foreground map from color segmentation or background subtraction, pose estimation can be simulated as a jigsaw puzzle problem. In the following, we show how a pose estimation problem can be formulated using the consistent max-covering scheme and how we can solve consistent max-covering using an efficient linear method. Lower arm Body plan tree edge Lower leg Upper arm Upper leg Head Torso Upper arm Upper leg Color symmetry edge Lower arm Covering hyper-edge Figure 1. Left: 1-part body model. Right: relation graph of body parts. The gray area shows the example of a hyper-edge. We use the widely used 1-part body model which contains head, torso, upper arms, lower arms, upper legs and lower legs. Each body part is represented as a rectangle. Our method can also be easily extended to more complex body part shapes. The cardboard figure and the part relation graph are shown in Fig. 1. In our model, the basic body plan follows a tree structure. Apart from interactions between neighboring body parts, consistent max-covering formulation introduces hyper-edges linking body parts that cover the same foreground region, and edges that constrain symmetry body parts. The tree is rooted at the torso and has directional edges. The other two kinds of edges are nondirectional. Similar to other bottom-up pose estimation methods, we first locate potential body part candidates in target images so that we can use them in consistent max-covering. We use simple box detectors to find potential candidates on the edge map of the target image. Chamfer matching is used to match body part templates to the target edge map at different locations and rotations. Non-minimum suppression is then used to locate body part candidates. Since we have a rough foreground map, body part candidates can be further pruned: we only keep the body part candidates whose Lower leg average foreground potentials are greater than a threshold Consistent Max-Covering Each body part candidate covers some pixels in the object foreground. Intuitively, the body part tiles should cover foreground pixels as much as possible in a consistent manner. Each pixel in the foreground map corresponds to a floating point number from to 1 which indicates the foreground potential. The higher the potential is, the more likely the pixel belongs to the object foreground. We denote the foreground map as f x,y. The consistent max-covering can be formulated as the following optimization problem: max { r x,y αm(c) βp(c) γs(c)} C (x,y) I s.t. r x,y = f x,y if (x, y) is covered by parts, else C is a body part covering (1) where r x,y is the covered potential at pixel (x, y) with the current body part covering C: if the pixel (x, y) in the foreground I is covered by body parts, r x,y takes value f x,y and otherwise. Therefore, the first term in the objective function equals the overall potential covered by all the body parts. The second term M(C) is the cost of matching the body parts to local image features. The third term P (C) is the degree of the body part configuration following a human body plan. The last term S(C) penalizes the color difference of symmetrical body parts: if the symmetrical parts, e.g. upper arms, have large color difference, S has large value. We reverse the sign of the last three terms so that they are minimized. α, β and γ are positive constants to control the weight among the energy terms. This optimization thus tends to find a consistent max-covering on the object foreground. The consistent max-covering in Eqn.(1) is a combinatorial search problem. It is generally NP-hard because of the loopy part relations introduced by covering terms. The large number of feasible covering configurations makes naive exhaustive search infeasible, and for such a problem greedy method is not sufficient. We use a global search method to tackle this problem. In this following, we propose an efficient linear solution Linear Solution We linearize the consistent max-covering optimization in Eqn.(1) and obtain a mixed integer linear program. It can be further relaxed into a much simpler linear program for efficient solution Foreground Covering Potential In Eqn.(1) the covering term in the objective function is (x,y) I r x,y, which equals the total potential covered by 1358
3 Part p Candidate k Part m Candidate j Part n Candidate i Pixel (x,y) (a) (b) Figure 2. (a) Body part covering example in which part candidates (n, i), (m, j) and (p, k) cover point (x, y) in the foreground map. (b) Definitions of edge variables and node variables. n edge m Part node Part candidate i j k all the body parts. r represents the covering potential at a pixel. We now explicitly express how the variable r is related to the choice of body part locations. We introduce a binary indicator variable η n,i,whichis 1 if body part n selects target candidate i and otherwise. η n,i is therefore a node variable that corresponds to each node of the body graph. Since each body part only has one target location, we need to make sure η n,i =1, n V where T (n) is the target candidate set of body part n; V is the set of all body parts; we also use V to denote the node set of the body graph. We are now ready to specify the covering term using the node variable η. We introduce the following constraint for the covering variable r, η n,i r x,y (n,i) covers (x,y) in which (n, i) denotes the ith candidate for body part n. We further need to bound r x,y to be a nonnegative number that can be as big as the foreground potential, r x,y f x,y For r x,y not covered by any candidate tiles, it is set to zero. As an example shown in Fig. 2(a), there are totally three body part candidates (n, i), (p, k) and (m, j) covering the foreground pixel (x, y). The constraint for r x,y is therefore r x,y η n,i + η p,k + η m,j and r x,y f x,y. It is not hard to verify that with the above formulation r equals the covering potential: if at least one body part covers the foreground pixel (x, y), to maximize the objective function in Eqn.(1), r x,y should equal f x,y, recalling that body part indicator variable η is or 1 and f x,y is between and 1; if (x, y) is not covered by any part tiles, r x,y will be because of the upper bound constraint. Therefore, given such constraints, (x,y) I r x,y is indeed the overall covering potential of the body parts Image Matching Cost p Apart from the object foreground covering cost, assigning each body part to a target location involves an image matching cost. In this paper, the cost is the linear combination of the Chamfer matching cost and the local covering cost. Local covering cost equals 1 minus the average covering potential. With the binary node assignment variable η, the total image matching cost can be linearized as: M = c n,i η n,i n V, Here c n,i is the image matching cost of part n at location i Spatial Consistency A good body part assignment should have neighboring body parts linked together: the end points of consecutive body parts are close, and connected limbs have similar orientations. To linearize the spatial consistency function P (.) in Eqn.(1), we introduce an edge indicator variable ξ n,i,m,j for each directional tree edge (n, m); ξ n,i,m,j is 1 if body part n selects candidate i and body part m takes candidate j. The definitions of the edge variable ξ and node variable η are illustrated in Fig. 2(b). Using edge assignment variable ξ, the total spatial consistency cost is linearized as: P = h n,i,m,j ξ n,i,m,j (n,m) E,,j T (m) where E is the tree edge set and the coefficient h n,i,m,j is defined as ae n,i,m,j if n is torso h n,i,m,j = ad n,i,m,j +b sin 2 ( θ n,i θ m,j otherwise 2 ) Here e n,i,m,j is the Euclidean distance between a proper end of a torso candidate and the start point of an upper body part candidate; d n,i,m,j is the Euclidean distance between the end point of part n at location i and the start point of part m at location j; θ n,i is the angle of part n at location i and sin 2 ( θ n,i θ m,j 2 ) penalizes large angle difference for consecutive body parts; a and b are positive weight constants. The node variable η and the edge variable ξ are dependent. The pairwise edge assignment has to be consistent with the node assignment: each body part appearing in different pairs must have a unique assignment of the target candidate. To enforce the assignment consistency, (n, m) E,welet η n,i = ξ n,i,m,j, η m,j = j T (m) ξ n,i,m,j Recall that T (m) is the set of covering candidates for part m. The above constraints imply that j T (m) ξ n,i,m,j = l T (k) ξ n,i,k,l, k m and ξ n,i,m,j = l T (k) ξ m,j,k,l. This enforces the assignment consistency at common nodes in the tree. 1359
4 2.2.4 Color Consistency To linearize the color difference term S in Eqn.(1), we use L1 norm to compute the color difference of two body parts so that we can use a standard linear programming auxiliary variable trick. Let H be the set of symmetrical body part pairs. Term S can be linearized as S = {n,m} H k=1 3 (g + n,m,k + g n,m,k ) where g + m,n,k and g m,n,k are nonnegative auxiliary variables. We use 3 color channels k =1..3. The nonnegative auxiliary variables are constrained by the color difference at each channel, g n,k g m,k = g + n,m,k g n,m,k, k =1..3, {n, m} H Here g n,k is the color of body part n at channel k. The color of a body part can be computed using the node assignment indicator variable η n,i : g n,k = l n,i,k η n,i and l n,i,k is the average color of the candidate covering region i for body part n at channel k. It is easy to verify that at least one variable in the pair of g + n,m,k and g n,m,k will become, when the objective function is optimized; otherwise we can zero one of them and obtain a better solution by subtracting the two variables with the smaller one of them. Therefore, when the objective function is optimized, g + n,m,k + g n,m,k = g n,k g m,k,ands is the L1 color distance between symmetrical body parts. Note that the color symmetry term is a regularization term in the objective function. The constraint of color is therefore soft, which permits occasionally large discrepancy of colors on symmetrical body parts Relaxation Solution The above optimization is a mixed integer program with binary variables ξ, η and continuous variables r and g. Directly solving the mixed integer program has high complexity. We relax it into the following linear program, max{ r x,y α c n,i η n,i (x,y) I β n V, (n,m) E,,j T (m) h n,i,m,j ξ n,i,m,j 3 γ (g + n,m,k + g n,m,k )} {n,m} H k=1 s.t. η n,i = ξ n,i,m,j,η m,j = j T (m) ξ n,i,m,j, ξ, (n, m) E η n,i =1,η n,i,i T (n), n V g n,k g m,k = g + n,m,k g n,m,k, g + n,m,k,g n,m,k, {n, m} H g n,k = l n,i,k η n,i, k =1..3, n V (n,i) covers (x,y) η n,i r x,y, r x,y f x,y, (x, y) I where ξ and η are relaxed into continuous variables in [,1]. If we do not include the covering constraint term and color symmetry term, the linear program on the tree structure body plan is equivalent to the integer program and it can be solved efficiently using dynamic programming. The nontree structure of consistent max-covering complicates the solution. Its relaxation does not directly yield integer solutions for node variables η. Direct rounding by selecting the largest η for each body part yields poor results. Fortunately, using the interior method, its solution almost always contains very few large η. We threshold η to zero out most variables. The typical threshold is.1. Similar to the approximation trick in [17], we can further construct a small mixed integer program by only including the target candidates corresponding to the nonzero η. The small mixed integer program can be directly solved using simple exhaustive enumeration or the more efficient branch and bound method. Since the first step eliminates a large number of covering candidates, the second exhaustive search step can be quickly solved. The average complexity of a linear program is roughly linear to the number of constraints and logarithm to the number of variables [19]. This simplex method heuristic applies to our model for which primal-dual interior point method is almost always faster than simplex method for different problem sizes. The number of edge variables of the proposed linear program is proportional to the square of the number of target candidates n; the number of foreground variables equals the number of foreground pixels m. The number of constraints is in the same order as the number of variables. The linear program thus has the O((n 2 + m) log(n 2 + m)) average complexity. We can further speed up the linear program by heuristics. The neighboring tree nodes only accept quite limited set of candidates: the pair of candidates too close or too far away can be pruned. Using such a trick, the number of edge variables and related constraints can be greatly reduced. The number of foreground variables and constraints can also be reduced by using a coarser representation of the foreground map: instead of corresponding to each pixel, foreground variable and constraint correspond to each region. Due to the slow 136




5 Figure 3. Pose estimation using cluttered foreground. The grayscale images on the first and third columns are foreground maps with different noisy levels; gray indicates potential and white 1. The pose estimation results are overlapped on the corresponding color images. Figure 4. Compare with pose estimation using max-covering which ignores the consistency constraints. From left to right: input image, foreground map, pose estimation using max-covering and the result of consistent max-covering. Figure 5. Compare with dynamic programming (). The first two rows are the results of and the last two rows show how the proposed method improves the result. variation of the foreground map, down sampling will not degrade the performance. Typically we extract 1 torso candidates, 2-5 limb and head candidates, and use 25-5 foreground variables to represent foreground map regions. In a 2.8GHz Linux machine, the linear program takes less than 2 seconds to converge. 3. Experimental Results In this section, we evaluate the consistent max-covering method for human pose estimation and compare the proposed method with different approaches. Fig. 3 illustrates the proposed method s resistance to cluttered foreground. The foreground map is obtained from background subtraction and shown as the first image in Fig. 3. We add clutter into the foreground map to simulate foregrounds at different noisy levels. As shown in Fig. 3, the consistent max-covering method works well with cluttered foregrounds. The result degrades mildly even though there is substantial amount of clutter in both the object foreground and background. Fig. 4 illustrates the results of max-covering and consistent max-covering. Max-covering maximizes the covering potential while ignoring other consistency constraints. As expected, max-covering may generate a body part covering that does not resemble a human body plan. Consistent maxcovering is necessary to obtain a good result. We proceed to test another variation of the linear method in which we keep only the local part matching cost and the tree structure spatial consistency constraint. Ignoring the covering energy, this is in fact the formulation which can Figure 6. Compare with a simpler linear formulation () which uses only node variables. Rows 1-2 are the results of Simple LP and the last 2 rows show the results of the proposed method. Table 1. Average Number of Errors Per Frame in Pose Estimation (B1-2, L1-2, T, F indicate ballet, lab, taichi and fitness videos) B1 B2 L1 L2 T F CM-Covering [16] Non- [17] be solved by dynamic programming () [13]. The proposed relaxation method is exact and equivalent to in this case. Without global constraints, we expect more errors. Fig. 5 shows how the proposed method improves the 1361
 2 4 6 8 1 Figure 7. Per-frame error number distributions for different variations of the proposed linear method.")




 formulation.")

![6, the proposed method yields better results for challenging cases. The comparison of the two methods using all the 6 Figure 8. Compare with tree inference method [16].](/docs-images/88/114771016/images/6-8.jpg "The first 4 rows are the results using tree inference and the last 4 rows show results of the proposed method. test videos is summarized in Fig. 7 and Table 1.")

6 Ballet I(31 frames) Ballet II(314 frames) Lab I(186 frames) Taichi(33 frames) Lab II(276 frames) Fitness(84 frames) Figure 7. Per-frame error number distributions for different variations of the proposed linear method. CM-Covering is the proposed method; ignores covering and color constraints; Simple LP uses only node variables. Good performance is characterized by large portion of a curve at small error range. result over. The complete comparison of the proposed method with is based on 6 test video sequences: 2 ballet sequences, 2 lab sequences and 2 videos from YouTube. The ballet sequences include complex movements and body part self-occlusions. In the YouTube sequences and the lab sequences, actors wear baggy clothes and perform complex movements. YouTube videos also have low image quality due to heavy compression. There are totally 1464 images in testing. The comparison using all the 6 test videos is shown in Fig. 7 and Table 1. Fig. 7 shows the normalized histograms of per-frame part detection errors for each video. Since there are 1 body parts, the number of errors per frame is from to 1. The ideal pose detector should have a single peak of 1 at and vanishes anywhere else. A good real detector has an error number histogram focused at the left side and has a short tail at the right side. As shown in Fig. 7, the proposed method is substantially better than. The average number of errors per frame in Table 1 confirms the observation, where the errors per frame of the proposed method are less than 1/3 those of. We further compare the proposed method with a closely related linear programming (LP) formulation. If the body part end point distance is measured with L1 norm, we can use the auxiliary variable trick to construct a simpler linear formulation that includes only node variables. In this restrictive case, the proposed method and the simple LP formulation are equivalent with integer constraints. But the relaxation solution has a big difference. As shown in Fig. 6, the proposed method yields better results for challenging cases. The comparison of the two methods using all the 6 Figure 8. Compare with tree inference method [16]. The first 4 rows are the results using tree inference and the last 4 rows show results of the proposed method. test videos is summarized in Fig. 7 and Table 1. The proposed method is consistently better over all the test cases with about half of the per-frame errors. Our previous tests show that the proposed method is indeed better than its related variations. The question is: does it generate better results than simpler locally constrained methods? One method we compared is the inference method using tree structure [16]. We run the code with this paper on our data. For fair comparison, we use foreground mask to partially eliminate the background clutter before using the code for body part detection. As shown in Fig. 8, tree method sometimes misses body parts because it does not incorporate the global body shape information; the proposed method gives better results. The per-frame error number histogram comparison is shown in Fig. 1 and the comparison of per-frame average error number is in Table 1. The proposed method gives better results over all the test cases. We further compare the proposed method 1362
 Non 2 4 6 8 1.4.3.2.1 Fitness(84 frames) Non 2 4 6 8 1 Figure 1.")
![Per-frame error distribution comparison with tree inference () [16] and non-tree optimization (Non-) [17].](/docs-images/88/114771016/images/7-1.jpg "CM- Covering is the proposed method.")











![Liu, Skeleton pruning by contour partitioning with discrete curve evolution, TPAMI, 29(3), 27. [2] R.](/docs-images/88/114771016/images/7-14.jpg "Rosales and S. Sclaroff, Inferring body pose without tracking body parts, CVPR 2. [3] A. Agarwal and B.")
7 Ballet I(31 frames) Non Ballet II(314 frames) Non Lab I(186 frames) Taichi(33 frames) Non Non Lab II(276 frames) Non Fitness(84 frames) Non Figure 1. Per-frame error distribution comparison with tree inference () [16] and non-tree optimization (Non-) [17]. CM- Covering is the proposed method. Good performance is characterized by large portion of a curve at small error range. Figure 9. Compare with non-tree method [17]. The first 4 rows are the results using the non-tree method and the last 4 rows show results of the proposed method. with a non-tree method [17]. This method also uses only local constraints. The results are shown in Fig. 9, Fig. 1 and Table 1. The proposed method still works much better. More sample results of pose estimation using the proposed method are shown in Fig. 11. The proposed method robustly detects body poses in the test sequences. As shown in Fig. 11, a few more errors occur in the taichi and fitness sequences. This is mostly due to the simple body part detector used in this paper. Weak image edges may result in error local matching costs associated with body part candidates. Better body part detector can be used to further improve the results. 4. Conclusion We propose a novel consistent max-covering scheme for robust human pose estimation. The proposed scheme integrates object overall shape in body part assembly for more robust pose estimation. We combine different clues such as edges, color symmetry, body linkage plan seamlessly and try to find an optimal consistent max-covering of the object foreground map using body part polygons. The proposed method introduces high order correlations among multiple body parts and greatly improves the robustness of pose estimation for complex movements. We propose a linear formulation and an efficient relaxation method. Experiments on challenging video sequences show that the proposed method is robust and efficient in human pose estimation. We believe the proposed method is useful for many applications including automatic surveillance and human movement analysis. References [1] X. Bai and W.Y. Liu, Skeleton pruning by contour partitioning with discrete curve evolution, TPAMI, 29(3), 27. [2] R. Rosales and S. Sclaroff, Inferring body pose without tracking body parts, CVPR 2. [3] A. Agarwal and B. Triggs, 3D human pose from silhouettes by relevance vector regression, CVPR 24. [4] K. Grauman, G. Shakhnarovich and T. Darrell, Inferring 3D structure with a statistical image-based shape model, ICCV 23. [5] A. Elgammal and C.S. Lee, Inferring 3D body pose from silhouettes using activity manifold learning, CVPR 24. [6] J.M. Wang, D.J. Fleet, A. Hertzmann, Gaussian process dynamical models for human motion, TPAMI, 3(2), 28. [7] G. Mori and J. Malik, Estimating human body configurations using shape context matching, ECCV 22. [8] D.M. Gavrila, A Bayesian, exemplar-based approach to hierarchical shape matching, TPAMI, 29(8),





























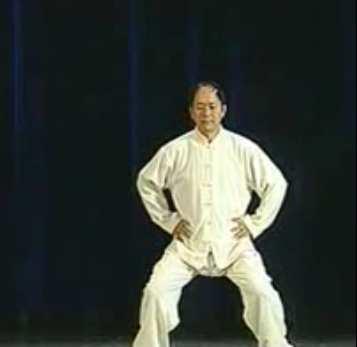










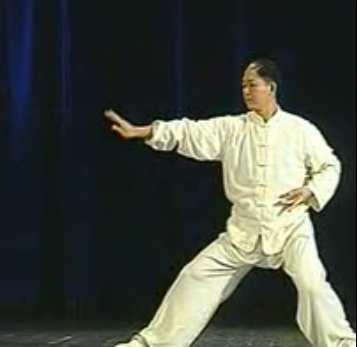




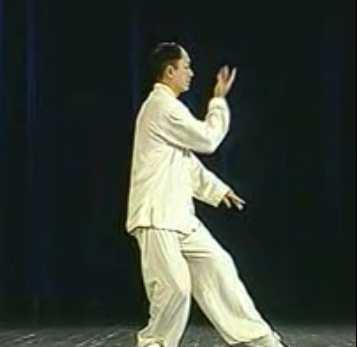

















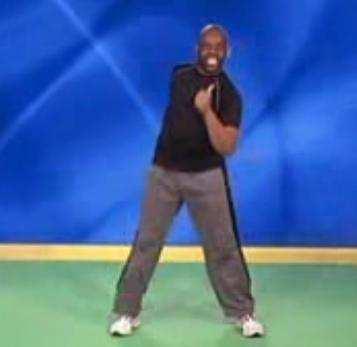


8 Figure 11. Pose estimation using consistent max-covering for the 6 test videos. Ballet has complex movements, self-occlusion, fast motion and interleaving effects; Lab involves baggy clothes, cluttered background and foreground; Actors wear baggy clothes in taichi and fitness sequences from YouTube. We use simple color segmentation to extract foreground maps for all the sequences except lab-ii for which we use background subtraction. Row 1: sample results for 31-frame ballet-i; Rows 2-3: sample results for 314-frame ballet-ii; Rows 4-5: sample results for 186-frame lab-i; Rows 6-7: sample results for 276-frame lab-ii; Rows 8-1: sample results for 33-frame taichi; Row 11-12: sample results for 84-frame fitness. [9] G. Shakhnarovich, P. Viola, and T. Darrell, Fast pose estimation with parameter sensitive hashing, ICCV 23. [1] P.F. Felzenszwalb and D.P. Huttenlocher. Pictorial structures for object recognition, IJCV, 61(1), 25. [11] S. Ioffe and D.A. Forsyth, Probabilistic methods for finding people, IJCV, 43(1), June 21. [12] M.W. Lee and I. Cohen, Proposal maps driven MCMC for estimating human body pose in static images, CVPR 24. [13] P.F. Felzenszwalb and D.P. Huttenlocher, Efficient matching of pictorial structures, CVPR 2. [14] R. Ronfard, C. Schmid, and B. Triggs, Learning to parse pictures of people, ECCV 22. [15] X. Ren, A. Berg and J. Malik, Recovering human body configurations using pairwise constraints between parts, ICCV 25. [16] D. Ramanan, Learning to parse images of articulated objects, NIPS 26. [17] H. Jiang and D.R. Martin, Global pose estimation using non-tree models, CVPR 28. [18] L. Sigal and M.J. Black, Measure locally, reasoning globally: occlusion-sensitive articulated pose estimation, CVPR 26. [19] V. Chva tal, Linear Programming, W.H. Freeman and Company, New York,
Global Pose Estimation Using Non-Tree Models
 Global Pose Estimation Using Non-Tree Models Hao Jiang and David R. Martin Computer Science Department, Boston College Chestnut Hill, MA 02467, USA hjiang@cs.bc.edu, dmartin@cs.bc.edu Abstract We propose
Global Pose Estimation Using Non-Tree Models Hao Jiang and David R. Martin Computer Science Department, Boston College Chestnut Hill, MA 02467, USA hjiang@cs.bc.edu, dmartin@cs.bc.edu Abstract We propose
Scale and Rotation Invariant Approach to Tracking Human Body Part Regions in Videos
 Scale and Rotation Invariant Approach to Tracking Human Body Part Regions in Videos Yihang Bo Institute of Automation, CAS & Boston College yihang.bo@gmail.com Hao Jiang Computer Science Department, Boston
Scale and Rotation Invariant Approach to Tracking Human Body Part Regions in Videos Yihang Bo Institute of Automation, CAS & Boston College yihang.bo@gmail.com Hao Jiang Computer Science Department, Boston
Human Upper Body Pose Estimation in Static Images
 1. Research Team Human Upper Body Pose Estimation in Static Images Project Leader: Graduate Students: Prof. Isaac Cohen, Computer Science Mun Wai Lee 2. Statement of Project Goals This goal of this project
1. Research Team Human Upper Body Pose Estimation in Static Images Project Leader: Graduate Students: Prof. Isaac Cohen, Computer Science Mun Wai Lee 2. Statement of Project Goals This goal of this project
Tracking People. Tracking People: Context
 Tracking People A presentation of Deva Ramanan s Finding and Tracking People from the Bottom Up and Strike a Pose: Tracking People by Finding Stylized Poses Tracking People: Context Motion Capture Surveillance
Tracking People A presentation of Deva Ramanan s Finding and Tracking People from the Bottom Up and Strike a Pose: Tracking People by Finding Stylized Poses Tracking People: Context Motion Capture Surveillance
Template Matching Rigid Motion. Find transformation to align two images. Focus on geometric features
 Template Matching Rigid Motion Find transformation to align two images. Focus on geometric features (not so much interesting with intensity images) Emphasis on tricks to make this efficient. Problem Definition
Template Matching Rigid Motion Find transformation to align two images. Focus on geometric features (not so much interesting with intensity images) Emphasis on tricks to make this efficient. Problem Definition
Object Recognition Using Pictorial Structures. Daniel Huttenlocher Computer Science Department. In This Talk. Object recognition in computer vision
 Object Recognition Using Pictorial Structures Daniel Huttenlocher Computer Science Department Joint work with Pedro Felzenszwalb, MIT AI Lab In This Talk Object recognition in computer vision Brief definition
Object Recognition Using Pictorial Structures Daniel Huttenlocher Computer Science Department Joint work with Pedro Felzenszwalb, MIT AI Lab In This Talk Object recognition in computer vision Brief definition
Template Matching Rigid Motion
 Template Matching Rigid Motion Find transformation to align two images. Focus on geometric features (not so much interesting with intensity images) Emphasis on tricks to make this efficient. Problem Definition
Template Matching Rigid Motion Find transformation to align two images. Focus on geometric features (not so much interesting with intensity images) Emphasis on tricks to make this efficient. Problem Definition
Learning to parse images of articulated bodies
 Learning to parse images of articulated bodies Deva Ramanan Toyota Technological Institute at Chicago Chicago, IL 60637 ramanan@tti-c.org Abstract We consider the machine vision task of pose estimation
Learning to parse images of articulated bodies Deva Ramanan Toyota Technological Institute at Chicago Chicago, IL 60637 ramanan@tti-c.org Abstract We consider the machine vision task of pose estimation
1 Introduction HUMAN MOVEMENT SUMMARIZATION AND DEPICTION FROM VIDEOS. Yijuan Lu 1 and Hao Jiang 2
 HUMAN MOVEMENT SUMMARIZATION AND DEPICTION FROM VIDEOS Yijuan Lu 1 and Hao Jiang 2 1 Texas State University and 2 Boston College ABSTRACT Human movement summarization and depiction from videos is to automatically
HUMAN MOVEMENT SUMMARIZATION AND DEPICTION FROM VIDEOS Yijuan Lu 1 and Hao Jiang 2 1 Texas State University and 2 Boston College ABSTRACT Human movement summarization and depiction from videos is to automatically
Visuelle Perzeption für Mensch- Maschine Schnittstellen
 Visuelle Perzeption für Mensch- Maschine Schnittstellen Vorlesung, WS 2009 Prof. Dr. Rainer Stiefelhagen Dr. Edgar Seemann Institut für Anthropomatik Universität Karlsruhe (TH) http://cvhci.ira.uka.de
Visuelle Perzeption für Mensch- Maschine Schnittstellen Vorlesung, WS 2009 Prof. Dr. Rainer Stiefelhagen Dr. Edgar Seemann Institut für Anthropomatik Universität Karlsruhe (TH) http://cvhci.ira.uka.de
Estimating Human Pose in Images. Navraj Singh December 11, 2009
 Estimating Human Pose in Images Navraj Singh December 11, 2009 Introduction This project attempts to improve the performance of an existing method of estimating the pose of humans in still images. Tasks
Estimating Human Pose in Images Navraj Singh December 11, 2009 Introduction This project attempts to improve the performance of an existing method of estimating the pose of humans in still images. Tasks
Strike a Pose: Tracking People by Finding Stylized Poses
 Strike a Pose: Tracking People by Finding Stylized Poses Deva Ramanan 1 and D. A. Forsyth 1 and Andrew Zisserman 2 1 University of California, Berkeley Berkeley, CA 94720 2 University of Oxford Oxford,
Strike a Pose: Tracking People by Finding Stylized Poses Deva Ramanan 1 and D. A. Forsyth 1 and Andrew Zisserman 2 1 University of California, Berkeley Berkeley, CA 94720 2 University of Oxford Oxford,
Boosted Multiple Deformable Trees for Parsing Human Poses
 Boosted Multiple Deformable Trees for Parsing Human Poses Yang Wang and Greg Mori School of Computing Science Simon Fraser University Burnaby, BC, Canada {ywang12,mori}@cs.sfu.ca Abstract. Tree-structured
Boosted Multiple Deformable Trees for Parsing Human Poses Yang Wang and Greg Mori School of Computing Science Simon Fraser University Burnaby, BC, Canada {ywang12,mori}@cs.sfu.ca Abstract. Tree-structured
A Hierarchical Compositional System for Rapid Object Detection
 A Hierarchical Compositional System for Rapid Object Detection Long Zhu and Alan Yuille Department of Statistics University of California at Los Angeles Los Angeles, CA 90095 {lzhu,yuille}@stat.ucla.edu
A Hierarchical Compositional System for Rapid Object Detection Long Zhu and Alan Yuille Department of Statistics University of California at Los Angeles Los Angeles, CA 90095 {lzhu,yuille}@stat.ucla.edu
Matching Bags of Regions in RGBD images
 Matching Bags of Regions in RGBD images Hao Jiang Boston College, USA hjiang@cs.bc.edu Abstract We study the new problem of matching regions between a pair of RGBD images given a large set of overlapping
Matching Bags of Regions in RGBD images Hao Jiang Boston College, USA hjiang@cs.bc.edu Abstract We study the new problem of matching regions between a pair of RGBD images given a large set of overlapping
Efficient Human Pose Estimation via Parsing a Tree Structure Based Human Model
 Efficient Human Pose Estimation via Parsing a Tree Structure Based Human Model Xiaoqin Zhang 1,Changcheng Li 2, Xiaofeng Tong 3,Weiming Hu 1,Steve Maybank 4,Yimin Zhang 3 1 National Laboratory of Pattern
Efficient Human Pose Estimation via Parsing a Tree Structure Based Human Model Xiaoqin Zhang 1,Changcheng Li 2, Xiaofeng Tong 3,Weiming Hu 1,Steve Maybank 4,Yimin Zhang 3 1 National Laboratory of Pattern
Window based detectors
 Window based detectors CS 554 Computer Vision Pinar Duygulu Bilkent University (Source: James Hays, Brown) Today Window-based generic object detection basic pipeline boosting classifiers face detection
Window based detectors CS 554 Computer Vision Pinar Duygulu Bilkent University (Source: James Hays, Brown) Today Window-based generic object detection basic pipeline boosting classifiers face detection
Human Pose Estimation with Rotated Geometric Blur
 Human Pose Estimation with Rotated Geometric Blur Bo Chen, Nhan Nguyen, and Greg Mori School of Computing Science Simon Fraser University Burnaby, BC, CANADA {bca11,tnn}@sfu.ca, mori@cs.sfu.ca Abstract
Human Pose Estimation with Rotated Geometric Blur Bo Chen, Nhan Nguyen, and Greg Mori School of Computing Science Simon Fraser University Burnaby, BC, CANADA {bca11,tnn}@sfu.ca, mori@cs.sfu.ca Abstract
Introduction to Digital Image Processing
 Fall 2005 Image Enhancement in the Spatial Domain: Histograms, Arithmetic/Logic Operators, Basics of Spatial Filtering, Smoothing Spatial Filters Tuesday, February 7 2006, Overview (1): Before We Begin
Fall 2005 Image Enhancement in the Spatial Domain: Histograms, Arithmetic/Logic Operators, Basics of Spatial Filtering, Smoothing Spatial Filters Tuesday, February 7 2006, Overview (1): Before We Begin
A Linear Programming Approach for Multiple Object Tracking
 A Linear Programming Approach for Multiple Object Tracking Hao Jiang, Sidney Fels and James J. Little University of British Columbia, Vancouver, BC, V6T Z4, Canada haoj,ssfels@ece.ubc.ca, little@cs.ubc.ca
A Linear Programming Approach for Multiple Object Tracking Hao Jiang, Sidney Fels and James J. Little University of British Columbia, Vancouver, BC, V6T Z4, Canada haoj,ssfels@ece.ubc.ca, little@cs.ubc.ca
Object Category Detection: Sliding Windows
 04/10/12 Object Category Detection: Sliding Windows Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical
04/10/12 Object Category Detection: Sliding Windows Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical
Detecting and Segmenting Humans in Crowded Scenes
 Detecting and Segmenting Humans in Crowded Scenes Mikel D. Rodriguez University of Central Florida 4000 Central Florida Blvd Orlando, Florida, 32816 mikel@cs.ucf.edu Mubarak Shah University of Central
Detecting and Segmenting Humans in Crowded Scenes Mikel D. Rodriguez University of Central Florida 4000 Central Florida Blvd Orlando, Florida, 32816 mikel@cs.ucf.edu Mubarak Shah University of Central
Recognition Rate. 90 S 90 W 90 R Segment Length T
 Human Action Recognition By Sequence of Movelet Codewords Xiaolin Feng y Pietro Perona yz y California Institute of Technology, 36-93, Pasadena, CA 925, USA z Universit a dipadova, Italy fxlfeng,peronag@vision.caltech.edu
Human Action Recognition By Sequence of Movelet Codewords Xiaolin Feng y Pietro Perona yz y California Institute of Technology, 36-93, Pasadena, CA 925, USA z Universit a dipadova, Italy fxlfeng,peronag@vision.caltech.edu
Human pose estimation using Active Shape Models
 Human pose estimation using Active Shape Models Changhyuk Jang and Keechul Jung Abstract Human pose estimation can be executed using Active Shape Models. The existing techniques for applying to human-body
Human pose estimation using Active Shape Models Changhyuk Jang and Keechul Jung Abstract Human pose estimation can be executed using Active Shape Models. The existing techniques for applying to human-body
Motivation. Gray Levels
 Motivation Image Intensity and Point Operations Dr. Edmund Lam Department of Electrical and Electronic Engineering The University of Hong ong A digital image is a matrix of numbers, each corresponding
Motivation Image Intensity and Point Operations Dr. Edmund Lam Department of Electrical and Electronic Engineering The University of Hong ong A digital image is a matrix of numbers, each corresponding
A novel template matching method for human detection
 University of Wollongong Research Online Faculty of Informatics - Papers (Archive) Faculty of Engineering and Information Sciences 2009 A novel template matching method for human detection Duc Thanh Nguyen
University of Wollongong Research Online Faculty of Informatics - Papers (Archive) Faculty of Engineering and Information Sciences 2009 A novel template matching method for human detection Duc Thanh Nguyen
Finding people in repeated shots of the same scene
 1 Finding people in repeated shots of the same scene Josef Sivic 1 C. Lawrence Zitnick Richard Szeliski 1 University of Oxford Microsoft Research Abstract The goal of this work is to find all occurrences
1 Finding people in repeated shots of the same scene Josef Sivic 1 C. Lawrence Zitnick Richard Szeliski 1 University of Oxford Microsoft Research Abstract The goal of this work is to find all occurrences
Supervised texture detection in images
 Supervised texture detection in images Branislav Mičušík and Allan Hanbury Pattern Recognition and Image Processing Group, Institute of Computer Aided Automation, Vienna University of Technology Favoritenstraße
Supervised texture detection in images Branislav Mičušík and Allan Hanbury Pattern Recognition and Image Processing Group, Institute of Computer Aided Automation, Vienna University of Technology Favoritenstraße
Guiding Model Search Using Segmentation
 Guiding Model Search Using Segmentation Greg Mori School of Computing Science Simon Fraser University Burnaby, BC, Canada V5A S6 mori@cs.sfu.ca Abstract In this paper we show how a segmentation as preprocessing
Guiding Model Search Using Segmentation Greg Mori School of Computing Science Simon Fraser University Burnaby, BC, Canada V5A S6 mori@cs.sfu.ca Abstract In this paper we show how a segmentation as preprocessing
Predicting 3D People from 2D Pictures
 Predicting 3D People from 2D Pictures Leonid Sigal Michael J. Black Department of Computer Science Brown University http://www.cs.brown.edu/people/ls/ CIAR Summer School August 15-20, 2006 Leonid Sigal
Predicting 3D People from 2D Pictures Leonid Sigal Michael J. Black Department of Computer Science Brown University http://www.cs.brown.edu/people/ls/ CIAR Summer School August 15-20, 2006 Leonid Sigal
Measure Locally, Reason Globally: Occlusion-sensitive Articulated Pose Estimation
 Measure Locally, Reason Globally: Occlusion-sensitive Articulated Pose Estimation Leonid Sigal Michael J. Black Department of Computer Science, Brown University, Providence, RI 02912 {ls,black}@cs.brown.edu
Measure Locally, Reason Globally: Occlusion-sensitive Articulated Pose Estimation Leonid Sigal Michael J. Black Department of Computer Science, Brown University, Providence, RI 02912 {ls,black}@cs.brown.edu
Recognizing Human Actions from Still Images with Latent Poses
 Recognizing Human Actions from Still Images with Latent Poses Weilong Yang, Yang Wang, and Greg Mori School of Computing Science Simon Fraser University Burnaby, BC, Canada wya16@sfu.ca, ywang12@cs.sfu.ca,
Recognizing Human Actions from Still Images with Latent Poses Weilong Yang, Yang Wang, and Greg Mori School of Computing Science Simon Fraser University Burnaby, BC, Canada wya16@sfu.ca, ywang12@cs.sfu.ca,
CS 534: Computer Vision Segmentation and Perceptual Grouping
 CS 534: Computer Vision Segmentation and Perceptual Grouping Ahmed Elgammal Dept of Computer Science CS 534 Segmentation - 1 Outlines Mid-level vision What is segmentation Perceptual Grouping Segmentation
CS 534: Computer Vision Segmentation and Perceptual Grouping Ahmed Elgammal Dept of Computer Science CS 534 Segmentation - 1 Outlines Mid-level vision What is segmentation Perceptual Grouping Segmentation
Inferring 3D Body Pose from Silhouettes using Activity Manifold Learning
 CVPR 4 Inferring 3D Body Pose from Silhouettes using Activity Manifold Learning Ahmed Elgammal and Chan-Su Lee Department of Computer Science, Rutgers University, New Brunswick, NJ, USA {elgammal,chansu}@cs.rutgers.edu
CVPR 4 Inferring 3D Body Pose from Silhouettes using Activity Manifold Learning Ahmed Elgammal and Chan-Su Lee Department of Computer Science, Rutgers University, New Brunswick, NJ, USA {elgammal,chansu}@cs.rutgers.edu
Recovering Human Body Configurations: Combining Segmentation and Recognition
 Recovering Human Body Configurations: Combining Segmentation and Recognition Greg Mori, Xiaofeng Ren, Alexei A. Efros and Jitendra Malik Computer Science Division Robotics Research Group UC Berkeley University
Recovering Human Body Configurations: Combining Segmentation and Recognition Greg Mori, Xiaofeng Ren, Alexei A. Efros and Jitendra Malik Computer Science Division Robotics Research Group UC Berkeley University
A Unified Spatio-Temporal Articulated Model for Tracking
 A Unified Spatio-Temporal Articulated Model for Tracking Xiangyang Lan Daniel P. Huttenlocher {xylan,dph}@cs.cornell.edu Cornell University Ithaca NY 14853 Abstract Tracking articulated objects in image
A Unified Spatio-Temporal Articulated Model for Tracking Xiangyang Lan Daniel P. Huttenlocher {xylan,dph}@cs.cornell.edu Cornell University Ithaca NY 14853 Abstract Tracking articulated objects in image
Segmentation and Grouping April 19 th, 2018
 Segmentation and Grouping April 19 th, 2018 Yong Jae Lee UC Davis Features and filters Transforming and describing images; textures, edges 2 Grouping and fitting [fig from Shi et al] Clustering, segmentation,
Segmentation and Grouping April 19 th, 2018 Yong Jae Lee UC Davis Features and filters Transforming and describing images; textures, edges 2 Grouping and fitting [fig from Shi et al] Clustering, segmentation,
Detecting and Parsing of Visual Objects: Humans and Animals. Alan Yuille (UCLA)
") Detecting and Parsing of Visual Objects: Humans and Animals Alan Yuille (UCLA) Summary This talk describes recent work on detection and parsing visual objects. The methods represent objects in terms of
Detecting and Parsing of Visual Objects: Humans and Animals Alan Yuille (UCLA) Summary This talk describes recent work on detection and parsing visual objects. The methods represent objects in terms of
Articulated Model Detection in Range Images
 Articulated Model Detection in Range Images Jim Rodgers Stanford University jimkr@cs.stanford.edu June 14, 2006 Abstract We present a method for detecting the placement of complex articulated models in
Articulated Model Detection in Range Images Jim Rodgers Stanford University jimkr@cs.stanford.edu June 14, 2006 Abstract We present a method for detecting the placement of complex articulated models in
CS 231A Computer Vision (Fall 2011) Problem Set 4
 Problem Set 4") CS 231A Computer Vision (Fall 2011) Problem Set 4 Due: Nov. 30 th, 2011 (9:30am) 1 Part-based models for Object Recognition (50 points) One approach to object recognition is to use a deformable part-based
CS 231A Computer Vision (Fall 2011) Problem Set 4 Due: Nov. 30 th, 2011 (9:30am) 1 Part-based models for Object Recognition (50 points) One approach to object recognition is to use a deformable part-based
Combining PGMs and Discriminative Models for Upper Body Pose Detection
 Combining PGMs and Discriminative Models for Upper Body Pose Detection Gedas Bertasius May 30, 2014 1 Introduction In this project, I utilized probabilistic graphical models together with discriminative
Combining PGMs and Discriminative Models for Upper Body Pose Detection Gedas Bertasius May 30, 2014 1 Introduction In this project, I utilized probabilistic graphical models together with discriminative
Probabilistic Tracking and Reconstruction of 3D Human Motion in Monocular Video Sequences
 Probabilistic Tracking and Reconstruction of 3D Human Motion in Monocular Video Sequences Presentation of the thesis work of: Hedvig Sidenbladh, KTH Thesis opponent: Prof. Bill Freeman, MIT Thesis supervisors
Probabilistic Tracking and Reconstruction of 3D Human Motion in Monocular Video Sequences Presentation of the thesis work of: Hedvig Sidenbladh, KTH Thesis opponent: Prof. Bill Freeman, MIT Thesis supervisors
Viewpoint invariant exemplar-based 3D human tracking
 Computer Vision and Image Understanding 104 (2006) 178 189 www.elsevier.com/locate/cviu Viewpoint invariant exemplar-based 3D human tracking Eng-Jon Ong *, Antonio S. Micilotta, Richard Bowden, Adrian
Computer Vision and Image Understanding 104 (2006) 178 189 www.elsevier.com/locate/cviu Viewpoint invariant exemplar-based 3D human tracking Eng-Jon Ong *, Antonio S. Micilotta, Richard Bowden, Adrian
Histogram of Oriented Gradients for Human Detection
 Histogram of Oriented Gradients for Human Detection Article by Navneet Dalal and Bill Triggs All images in presentation is taken from article Presentation by Inge Edward Halsaunet Introduction What: Detect
Histogram of Oriented Gradients for Human Detection Article by Navneet Dalal and Bill Triggs All images in presentation is taken from article Presentation by Inge Edward Halsaunet Introduction What: Detect
Structured Models in. Dan Huttenlocher. June 2010
 Structured Models in Computer Vision i Dan Huttenlocher June 2010 Structured Models Problems where output variables are mutually dependent or constrained E.g., spatial or temporal relations Such dependencies
Structured Models in Computer Vision i Dan Huttenlocher June 2010 Structured Models Problems where output variables are mutually dependent or constrained E.g., spatial or temporal relations Such dependencies
Category vs. instance recognition
 Category vs. instance recognition Category: Find all the people Find all the buildings Often within a single image Often sliding window Instance: Is this face James? Find this specific famous building
Category vs. instance recognition Category: Find all the people Find all the buildings Often within a single image Often sliding window Instance: Is this face James? Find this specific famous building
Shape-based Pedestrian Parsing
 Shape-based Pedestrian Parsing Yihang Bo School of Computer and Information Technology Beijing Jiaotong University, China yihang.bo@gmail.com Charless C. Fowlkes Department of Computer Science University
Shape-based Pedestrian Parsing Yihang Bo School of Computer and Information Technology Beijing Jiaotong University, China yihang.bo@gmail.com Charless C. Fowlkes Department of Computer Science University
HUMAN PARSING WITH A CASCADE OF HIERARCHICAL POSELET BASED PRUNERS
 HUMAN PARSING WITH A CASCADE OF HIERARCHICAL POSELET BASED PRUNERS Duan Tran Yang Wang David Forsyth University of Illinois at Urbana Champaign University of Manitoba ABSTRACT We address the problem of
HUMAN PARSING WITH A CASCADE OF HIERARCHICAL POSELET BASED PRUNERS Duan Tran Yang Wang David Forsyth University of Illinois at Urbana Champaign University of Manitoba ABSTRACT We address the problem of
Category-level localization
 Category-level localization Cordelia Schmid Recognition Classification Object present/absent in an image Often presence of a significant amount of background clutter Localization / Detection Localize object
Category-level localization Cordelia Schmid Recognition Classification Object present/absent in an image Often presence of a significant amount of background clutter Localization / Detection Localize object
Object Category Detection. Slides mostly from Derek Hoiem
 Object Category Detection Slides mostly from Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical template matching with sliding window Part-based Models
Object Category Detection Slides mostly from Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical template matching with sliding window Part-based Models
CS443: Digital Imaging and Multimedia Binary Image Analysis. Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University
 CS443: Digital Imaging and Multimedia Binary Image Analysis Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines A Simple Machine Vision System Image segmentation by thresholding
CS443: Digital Imaging and Multimedia Binary Image Analysis Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines A Simple Machine Vision System Image segmentation by thresholding
Evaluating Example-based Pose Estimation: Experiments on the HumanEva Sets
 Evaluating Example-based Pose Estimation: Experiments on the HumanEva Sets Ronald Poppe Human Media Interaction Group, Department of Computer Science University of Twente, Enschede, The Netherlands poppe@ewi.utwente.nl
Evaluating Example-based Pose Estimation: Experiments on the HumanEva Sets Ronald Poppe Human Media Interaction Group, Department of Computer Science University of Twente, Enschede, The Netherlands poppe@ewi.utwente.nl
Raghuraman Gopalan Center for Automation Research University of Maryland, College Park
 2D Shape Matching (and Object Recognition) Raghuraman Gopalan Center for Automation Research University of Maryland, College Park 1 Outline What is a shape? Part 1: Matching/ Recognition Shape contexts
2D Shape Matching (and Object Recognition) Raghuraman Gopalan Center for Automation Research University of Maryland, College Park 1 Outline What is a shape? Part 1: Matching/ Recognition Shape contexts
Object Recognition Using Junctions
 Object Recognition Using Junctions Bo Wang 1, Xiang Bai 1, Xinggang Wang 1, Wenyu Liu 1, Zhuowen Tu 2 1. Dept. of Electronics and Information Engineering, Huazhong University of Science and Technology,
Object Recognition Using Junctions Bo Wang 1, Xiang Bai 1, Xinggang Wang 1, Wenyu Liu 1, Zhuowen Tu 2 1. Dept. of Electronics and Information Engineering, Huazhong University of Science and Technology,
Detection of Multiple, Partially Occluded Humans in a Single Image by Bayesian Combination of Edgelet Part Detectors
 Detection of Multiple, Partially Occluded Humans in a Single Image by Bayesian Combination of Edgelet Part Detectors Bo Wu Ram Nevatia University of Southern California Institute for Robotics and Intelligent
Detection of Multiple, Partially Occluded Humans in a Single Image by Bayesian Combination of Edgelet Part Detectors Bo Wu Ram Nevatia University of Southern California Institute for Robotics and Intelligent
CHAPTER 6 PERCEPTUAL ORGANIZATION BASED ON TEMPORAL DYNAMICS
 CHAPTER 6 PERCEPTUAL ORGANIZATION BASED ON TEMPORAL DYNAMICS This chapter presents a computational model for perceptual organization. A figure-ground segregation network is proposed based on a novel boundary
CHAPTER 6 PERCEPTUAL ORGANIZATION BASED ON TEMPORAL DYNAMICS This chapter presents a computational model for perceptual organization. A figure-ground segregation network is proposed based on a novel boundary
Geometric Registration for Deformable Shapes 3.3 Advanced Global Matching
 Geometric Registration for Deformable Shapes 3.3 Advanced Global Matching Correlated Correspondences [ASP*04] A Complete Registration System [HAW*08] In this session Advanced Global Matching Some practical
Geometric Registration for Deformable Shapes 3.3 Advanced Global Matching Correlated Correspondences [ASP*04] A Complete Registration System [HAW*08] In this session Advanced Global Matching Some practical
Motivation. Intensity Levels
 Motivation Image Intensity and Point Operations Dr. Edmund Lam Department of Electrical and Electronic Engineering The University of Hong ong A digital image is a matrix of numbers, each corresponding
Motivation Image Intensity and Point Operations Dr. Edmund Lam Department of Electrical and Electronic Engineering The University of Hong ong A digital image is a matrix of numbers, each corresponding
Hierarchical Part-Based Human Body Pose Estimation
 Hierarchical Part-Based Human Body Pose Estimation R. Navaratnam A. Thayananthan P. H. S. Torr R. Cipolla University of Cambridge Oxford Brookes Univeristy Department of Engineering Cambridge, CB2 1PZ,
Hierarchical Part-Based Human Body Pose Estimation R. Navaratnam A. Thayananthan P. H. S. Torr R. Cipolla University of Cambridge Oxford Brookes Univeristy Department of Engineering Cambridge, CB2 1PZ,
Project Updates Short lecture Volumetric Modeling +2 papers
 Volumetric Modeling Schedule (tentative) Feb 20 Feb 27 Mar 5 Introduction Lecture: Geometry, Camera Model, Calibration Lecture: Features, Tracking/Matching Mar 12 Mar 19 Mar 26 Apr 2 Apr 9 Apr 16 Apr 23
Volumetric Modeling Schedule (tentative) Feb 20 Feb 27 Mar 5 Introduction Lecture: Geometry, Camera Model, Calibration Lecture: Features, Tracking/Matching Mar 12 Mar 19 Mar 26 Apr 2 Apr 9 Apr 16 Apr 23
Simultaneous Appearance Modeling and Segmentation for Matching People under Occlusion
 Simultaneous Appearance Modeling and Segmentation for Matching People under Occlusion Zhe Lin, Larry S. Davis, David Doermann, and Daniel DeMenthon Institute for Advanced Computer Studies University of
Simultaneous Appearance Modeling and Segmentation for Matching People under Occlusion Zhe Lin, Larry S. Davis, David Doermann, and Daniel DeMenthon Institute for Advanced Computer Studies University of
Scene Grammars, Factor Graphs, and Belief Propagation
 Scene Grammars, Factor Graphs, and Belief Propagation Pedro Felzenszwalb Brown University Joint work with Jeroen Chua Probabilistic Scene Grammars General purpose framework for image understanding and
Scene Grammars, Factor Graphs, and Belief Propagation Pedro Felzenszwalb Brown University Joint work with Jeroen Chua Probabilistic Scene Grammars General purpose framework for image understanding and
COSC160: Detection and Classification. Jeremy Bolton, PhD Assistant Teaching Professor
 COSC160: Detection and Classification Jeremy Bolton, PhD Assistant Teaching Professor Outline I. Problem I. Strategies II. Features for training III. Using spatial information? IV. Reducing dimensionality
COSC160: Detection and Classification Jeremy Bolton, PhD Assistant Teaching Professor Outline I. Problem I. Strategies II. Features for training III. Using spatial information? IV. Reducing dimensionality
Bottom-up Recognition and Parsing of the Human Body
 University of Pennsylvania ScholarlyCommons Departmental Papers (CIS) Department of Computer & Information Science 2007 Bottom-up Recognition and Parsing of the Human Body Praveen Srinivasan University
University of Pennsylvania ScholarlyCommons Departmental Papers (CIS) Department of Computer & Information Science 2007 Bottom-up Recognition and Parsing of the Human Body Praveen Srinivasan University
Scene Grammars, Factor Graphs, and Belief Propagation
 Scene Grammars, Factor Graphs, and Belief Propagation Pedro Felzenszwalb Brown University Joint work with Jeroen Chua Probabilistic Scene Grammars General purpose framework for image understanding and
Scene Grammars, Factor Graphs, and Belief Propagation Pedro Felzenszwalb Brown University Joint work with Jeroen Chua Probabilistic Scene Grammars General purpose framework for image understanding and
Human Body Pose Estimation Using Silhouette Shape Analysis
 Human Body Pose Estimation Using Silhouette Shape Analysis Anurag Mittal Siemens Corporate Research Inc. Princeton, NJ 08540 Liang Zhao, Larry S. Davis Department of Computer Science University of Maryland
Human Body Pose Estimation Using Silhouette Shape Analysis Anurag Mittal Siemens Corporate Research Inc. Princeton, NJ 08540 Liang Zhao, Larry S. Davis Department of Computer Science University of Maryland
Learning and Inferring Depth from Monocular Images. Jiyan Pan April 1, 2009
 Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
Chapter 2 Basic Structure of High-Dimensional Spaces
 Chapter 2 Basic Structure of High-Dimensional Spaces Data is naturally represented geometrically by associating each record with a point in the space spanned by the attributes. This idea, although simple,
Chapter 2 Basic Structure of High-Dimensional Spaces Data is naturally represented geometrically by associating each record with a point in the space spanned by the attributes. This idea, although simple,
Beyond Bags of features Spatial information & Shape models
 Beyond Bags of features Spatial information & Shape models Jana Kosecka Many slides adapted from S. Lazebnik, FeiFei Li, Rob Fergus, and Antonio Torralba Detection, recognition (so far )! Bags of features
Beyond Bags of features Spatial information & Shape models Jana Kosecka Many slides adapted from S. Lazebnik, FeiFei Li, Rob Fergus, and Antonio Torralba Detection, recognition (so far )! Bags of features
Edge and local feature detection - 2. Importance of edge detection in computer vision
 Edge and local feature detection Gradient based edge detection Edge detection by function fitting Second derivative edge detectors Edge linking and the construction of the chain graph Edge and local feature
Edge and local feature detection Gradient based edge detection Edge detection by function fitting Second derivative edge detectors Edge linking and the construction of the chain graph Edge and local feature
Object Detection with Partial Occlusion Based on a Deformable Parts-Based Model
 Object Detection with Partial Occlusion Based on a Deformable Parts-Based Model Johnson Hsieh (johnsonhsieh@gmail.com), Alexander Chia (alexchia@stanford.edu) Abstract -- Object occlusion presents a major
Object Detection with Partial Occlusion Based on a Deformable Parts-Based Model Johnson Hsieh (johnsonhsieh@gmail.com), Alexander Chia (alexchia@stanford.edu) Abstract -- Object occlusion presents a major
Fast Human Detection Using a Cascade of Histograms of Oriented Gradients
 MITSUBISHI ELECTRIC RESEARCH LABORATORIES http://www.merl.com Fast Human Detection Using a Cascade of Histograms of Oriented Gradients Qiang Zhu, Shai Avidan, Mei-Chen Yeh, Kwang-Ting Cheng TR26-68 June
MITSUBISHI ELECTRIC RESEARCH LABORATORIES http://www.merl.com Fast Human Detection Using a Cascade of Histograms of Oriented Gradients Qiang Zhu, Shai Avidan, Mei-Chen Yeh, Kwang-Ting Cheng TR26-68 June
Coherent Motion Segmentation in Moving Camera Videos using Optical Flow Orientations - Supplementary material
 Coherent Motion Segmentation in Moving Camera Videos using Optical Flow Orientations - Supplementary material Manjunath Narayana narayana@cs.umass.edu Allen Hanson hanson@cs.umass.edu University of Massachusetts,
Coherent Motion Segmentation in Moving Camera Videos using Optical Flow Orientations - Supplementary material Manjunath Narayana narayana@cs.umass.edu Allen Hanson hanson@cs.umass.edu University of Massachusetts,
Human detection using local shape and nonredundant
 University of Wollongong Research Online Faculty of Informatics - Papers (Archive) Faculty of Engineering and Information Sciences 2010 Human detection using local shape and nonredundant binary patterns
University of Wollongong Research Online Faculty of Informatics - Papers (Archive) Faculty of Engineering and Information Sciences 2010 Human detection using local shape and nonredundant binary patterns
Feature Detectors and Descriptors: Corners, Lines, etc.
 Feature Detectors and Descriptors: Corners, Lines, etc. Edges vs. Corners Edges = maxima in intensity gradient Edges vs. Corners Corners = lots of variation in direction of gradient in a small neighborhood
Feature Detectors and Descriptors: Corners, Lines, etc. Edges vs. Corners Edges = maxima in intensity gradient Edges vs. Corners Corners = lots of variation in direction of gradient in a small neighborhood
Algorithms for Decision Support. Integer linear programming models
 Algorithms for Decision Support Integer linear programming models 1 People with reduced mobility (PRM) require assistance when travelling through the airport http://www.schiphol.nl/travellers/atschiphol/informationforpassengerswithreducedmobility.htm
Algorithms for Decision Support Integer linear programming models 1 People with reduced mobility (PRM) require assistance when travelling through the airport http://www.schiphol.nl/travellers/atschiphol/informationforpassengerswithreducedmobility.htm
People Tracking and Segmentation Using Efficient Shape Sequences Matching
 People Tracking and Segmentation Using Efficient Shape Sequences Matching Junqiu Wang, Yasushi Yagi, and Yasushi Makihara The Institute of Scientific and Industrial Research, Osaka University 8-1 Mihogaoka,
People Tracking and Segmentation Using Efficient Shape Sequences Matching Junqiu Wang, Yasushi Yagi, and Yasushi Makihara The Institute of Scientific and Industrial Research, Osaka University 8-1 Mihogaoka,
Robust Model-Free Tracking of Non-Rigid Shape. Abstract
 Robust Model-Free Tracking of Non-Rigid Shape Lorenzo Torresani Stanford University ltorresa@cs.stanford.edu Christoph Bregler New York University chris.bregler@nyu.edu New York University CS TR2003-840
Robust Model-Free Tracking of Non-Rigid Shape Lorenzo Torresani Stanford University ltorresa@cs.stanford.edu Christoph Bregler New York University chris.bregler@nyu.edu New York University CS TR2003-840
Mobile Human Detection Systems based on Sliding Windows Approach-A Review
 Mobile Human Detection Systems based on Sliding Windows Approach-A Review Seminar: Mobile Human detection systems Njieutcheu Tassi cedrique Rovile Department of Computer Engineering University of Heidelberg
Mobile Human Detection Systems based on Sliding Windows Approach-A Review Seminar: Mobile Human detection systems Njieutcheu Tassi cedrique Rovile Department of Computer Engineering University of Heidelberg
Object detection using non-redundant local Binary Patterns
 University of Wollongong Research Online Faculty of Informatics - Papers (Archive) Faculty of Engineering and Information Sciences 2010 Object detection using non-redundant local Binary Patterns Duc Thanh
University of Wollongong Research Online Faculty of Informatics - Papers (Archive) Faculty of Engineering and Information Sciences 2010 Object detection using non-redundant local Binary Patterns Duc Thanh
Clustered Pose and Nonlinear Appearance Models for Human Pose Estimation
 JOHNSON, EVERINGHAM: CLUSTERED MODELS FOR HUMAN POSE ESTIMATION 1 Clustered Pose and Nonlinear Appearance Models for Human Pose Estimation Sam Johnson s.a.johnson04@leeds.ac.uk Mark Everingham m.everingham@leeds.ac.uk
JOHNSON, EVERINGHAM: CLUSTERED MODELS FOR HUMAN POSE ESTIMATION 1 Clustered Pose and Nonlinear Appearance Models for Human Pose Estimation Sam Johnson s.a.johnson04@leeds.ac.uk Mark Everingham m.everingham@leeds.ac.uk
Last week. Multi-Frame Structure from Motion: Multi-View Stereo. Unknown camera viewpoints
 Last week Multi-Frame Structure from Motion: Multi-View Stereo Unknown camera viewpoints Last week PCA Today Recognition Today Recognition Recognition problems What is it? Object detection Who is it? Recognizing
Last week Multi-Frame Structure from Motion: Multi-View Stereo Unknown camera viewpoints Last week PCA Today Recognition Today Recognition Recognition problems What is it? Object detection Who is it? Recognizing
The goals of segmentation
 Image segmentation The goals of segmentation Group together similar-looking pixels for efficiency of further processing Bottom-up process Unsupervised superpixels X. Ren and J. Malik. Learning a classification
Image segmentation The goals of segmentation Group together similar-looking pixels for efficiency of further processing Bottom-up process Unsupervised superpixels X. Ren and J. Malik. Learning a classification
Histograms of Oriented Gradients for Human Detection p. 1/1
 Histograms of Oriented Gradients for Human Detection p. 1/1 Histograms of Oriented Gradients for Human Detection Navneet Dalal and Bill Triggs INRIA Rhône-Alpes Grenoble, France Funding: acemedia, LAVA,
Histograms of Oriented Gradients for Human Detection p. 1/1 Histograms of Oriented Gradients for Human Detection Navneet Dalal and Bill Triggs INRIA Rhône-Alpes Grenoble, France Funding: acemedia, LAVA,
AUTOMATIC OBJECT EXTRACTION IN SINGLE-CONCEPT VIDEOS. Kuo-Chin Lien and Yu-Chiang Frank Wang
 AUTOMATIC OBJECT EXTRACTION IN SINGLE-CONCEPT VIDEOS Kuo-Chin Lien and Yu-Chiang Frank Wang Research Center for Information Technology Innovation, Academia Sinica, Taipei, Taiwan {iker, ycwang}@citi.sinica.edu.tw
AUTOMATIC OBJECT EXTRACTION IN SINGLE-CONCEPT VIDEOS Kuo-Chin Lien and Yu-Chiang Frank Wang Research Center for Information Technology Innovation, Academia Sinica, Taipei, Taiwan {iker, ycwang}@citi.sinica.edu.tw
Human Pose Estimation in images and videos
 Human Pose Estimation in images and videos Andrew Zisserman Department of Engineering Science University of Oxford, UK http://www.robots.ox.ac.uk/~vgg/ Objective and motivation Determine human body pose
Human Pose Estimation in images and videos Andrew Zisserman Department of Engineering Science University of Oxford, UK http://www.robots.ox.ac.uk/~vgg/ Objective and motivation Determine human body pose
Previously. Part-based and local feature models for generic object recognition. Bag-of-words model 4/20/2011
 Previously Part-based and local feature models for generic object recognition Wed, April 20 UT-Austin Discriminative classifiers Boosting Nearest neighbors Support vector machines Useful for object recognition
Previously Part-based and local feature models for generic object recognition Wed, April 20 UT-Austin Discriminative classifiers Boosting Nearest neighbors Support vector machines Useful for object recognition
Parameter Sensitive Detectors
 Boston University OpenBU Computer Science http://open.bu.edu CAS: Computer Science: Technical Reports 2007 Parameter Sensitive Detectors Yuan, Quan Boston University Computer Science Department https://hdl.handle.net/244/680
Boston University OpenBU Computer Science http://open.bu.edu CAS: Computer Science: Technical Reports 2007 Parameter Sensitive Detectors Yuan, Quan Boston University Computer Science Department https://hdl.handle.net/244/680
9.1. K-means Clustering
 424 9. MIXTURE MODELS AND EM Section 9.2 Section 9.3 Section 9.4 view of mixture distributions in which the discrete latent variables can be interpreted as defining assignments of data points to specific
424 9. MIXTURE MODELS AND EM Section 9.2 Section 9.3 Section 9.4 view of mixture distributions in which the discrete latent variables can be interpreted as defining assignments of data points to specific
3 October, 2013 MVA ENS Cachan. Lecture 2: Logistic regression & intro to MIL Iasonas Kokkinos
 Machine Learning for Computer Vision 1 3 October, 2013 MVA ENS Cachan Lecture 2: Logistic regression & intro to MIL Iasonas Kokkinos Iasonas.kokkinos@ecp.fr Department of Applied Mathematics Ecole Centrale
Machine Learning for Computer Vision 1 3 October, 2013 MVA ENS Cachan Lecture 2: Logistic regression & intro to MIL Iasonas Kokkinos Iasonas.kokkinos@ecp.fr Department of Applied Mathematics Ecole Centrale
3 INTEGER LINEAR PROGRAMMING
 3 INTEGER LINEAR PROGRAMMING PROBLEM DEFINITION Integer linear programming problem (ILP) of the decision variables x 1,..,x n : (ILP) subject to minimize c x j j n j= 1 a ij x j x j 0 x j integer n j=
3 INTEGER LINEAR PROGRAMMING PROBLEM DEFINITION Integer linear programming problem (ILP) of the decision variables x 1,..,x n : (ILP) subject to minimize c x j j n j= 1 a ij x j x j 0 x j integer n j=
Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction
 Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction Marc Pollefeys Joined work with Nikolay Savinov, Christian Haene, Lubor Ladicky 2 Comparison to Volumetric Fusion Higher-order ray
Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction Marc Pollefeys Joined work with Nikolay Savinov, Christian Haene, Lubor Ladicky 2 Comparison to Volumetric Fusion Higher-order ray
Learning and Recognizing Visual Object Categories Without First Detecting Features
 Learning and Recognizing Visual Object Categories Without First Detecting Features Daniel Huttenlocher 2007 Joint work with D. Crandall and P. Felzenszwalb Object Category Recognition Generic classes rather
Learning and Recognizing Visual Object Categories Without First Detecting Features Daniel Huttenlocher 2007 Joint work with D. Crandall and P. Felzenszwalb Object Category Recognition Generic classes rather
Real-Time Human Pose Inference using Kernel Principal Component Pre-image Approximations
 1 Real-Time Human Pose Inference using Kernel Principal Component Pre-image Approximations T. Tangkuampien and D. Suter Institute for Vision Systems Engineering Monash University, Australia {therdsak.tangkuampien,d.suter}@eng.monash.edu.au
1 Real-Time Human Pose Inference using Kernel Principal Component Pre-image Approximations T. Tangkuampien and D. Suter Institute for Vision Systems Engineering Monash University, Australia {therdsak.tangkuampien,d.suter}@eng.monash.edu.au
Nonflat Observation Model and Adaptive Depth Order Estimation for 3D Human Pose Tracking
 Nonflat Observation Model and Adaptive Depth Order Estimation for 3D Human Pose Tracking Nam-Gyu Cho, Alan Yuille and Seong-Whan Lee Department of Brain and Cognitive Engineering, orea University, orea
Nonflat Observation Model and Adaptive Depth Order Estimation for 3D Human Pose Tracking Nam-Gyu Cho, Alan Yuille and Seong-Whan Lee Department of Brain and Cognitive Engineering, orea University, orea
Computer Vision I - Basics of Image Processing Part 2
 Computer Vision I - Basics of Image Processing Part 2 Carsten Rother 07/11/2014 Computer Vision I: Basics of Image Processing Roadmap: Basics of Digital Image Processing Computer Vision I: Basics of Image
Computer Vision I - Basics of Image Processing Part 2 Carsten Rother 07/11/2014 Computer Vision I: Basics of Image Processing Roadmap: Basics of Digital Image Processing Computer Vision I: Basics of Image
Discriminative classifiers for image recognition
 Discriminative classifiers for image recognition May 26 th, 2015 Yong Jae Lee UC Davis Outline Last time: window-based generic object detection basic pipeline face detection with boosting as case study
Discriminative classifiers for image recognition May 26 th, 2015 Yong Jae Lee UC Davis Outline Last time: window-based generic object detection basic pipeline face detection with boosting as case study
CS664 Lecture #21: SIFT, object recognition, dynamic programming
 CS664 Lecture #21: SIFT, object recognition, dynamic programming Some material taken from: Sebastian Thrun, Stanford http://cs223b.stanford.edu/ Yuri Boykov, Western Ontario David Lowe, UBC http://www.cs.ubc.ca/~lowe/keypoints/
CS664 Lecture #21: SIFT, object recognition, dynamic programming Some material taken from: Sebastian Thrun, Stanford http://cs223b.stanford.edu/ Yuri Boykov, Western Ontario David Lowe, UBC http://www.cs.ubc.ca/~lowe/keypoints/
6.801/866. Segmentation and Line Fitting. T. Darrell
 6.801/866 Segmentation and Line Fitting T. Darrell Segmentation and Line Fitting Gestalt grouping Background subtraction K-Means Graph cuts Hough transform Iterative fitting (Next time: Probabilistic segmentation)
6.801/866 Segmentation and Line Fitting T. Darrell Segmentation and Line Fitting Gestalt grouping Background subtraction K-Means Graph cuts Hough transform Iterative fitting (Next time: Probabilistic segmentation)
Color Image Segmentation
 Color Image Segmentation Yining Deng, B. S. Manjunath and Hyundoo Shin* Department of Electrical and Computer Engineering University of California, Santa Barbara, CA 93106-9560 *Samsung Electronics Inc.
Color Image Segmentation Yining Deng, B. S. Manjunath and Hyundoo Shin* Department of Electrical and Computer Engineering University of California, Santa Barbara, CA 93106-9560 *Samsung Electronics Inc.