Deep Quantization: Encoding Convolutional Activations with Deep Generative Model
|
|
|
- Louise Hodge
- 6 years ago
- Views:
Transcription
1 Deep Quantization: Encoding Convolutional Activations with Deep Generative Model Zhaofan Qiu, Ting Yao, and Tao Mei University of Science and Technology of China, Hefei, China Microsoft Research, Beijing, China {tiyao, arxiv: v1 [cs.cv] 29 Nov 2016 Abstract Deep convolutional neural networks (CNNs) have proven highly effective for visual recognition, where learning a universal representation from activations of convolutional layer plays a fundamental problem. In this paper, we present Fisher Vector encoding with Variational Auto- Encoder (FV-VAE), a novel deep architecture that quantizes the local activations of convolutional layer in a deep generative model, by training them in an end-to-end manner. To incorporate FV encoding strategy into deep generative models, we introduce Variational Auto-Encoder model, which steers a variational inference and learning in a neural network which can be straightforwardly optimized using standard stochastic gradient method. Different from the FV characterized by conventional generative models (e.g., Gaussian Mixture Model) which parsimoniously fit a discrete mixture model to data distribution, the proposed FV- VAE is more flexible to represent the natural property of data for better generalization. Extensive experiments are conducted on three public datasets, i.e., UCF101, ActivityNet, and CUB in the context of video action recognition and fine-grained image classification, respectively. Superior results are reported when compared to state-of-the-art representations. Most remarkably, our proposed FV-VAE achieves to-date the best published accuracy of 94.2% on UCF Introduction The recent advances in deep convolutional neural networks (CNNs) have demonstrated high capability in visual recognition. For instance, an ensemble of residual nets [8] achieves 3.57% in terms of top-5 error on the ImageNet dataset [26]. More importantly, when utilizing the activations of either a fully-connected layer or a convolutional layer in a pre-trained CNN as a universal visual representation and applying this representation to other visual recognition tasks (e.g., scene understanding, and semantic segmen- Convolutional Activations Convolutional Activations Global Activations FV Encoding FV-VAE Encoding Figure 1. Visual representations derived from activations of different layers in CNN (upper row: global activations of the fullyconnected layer; middle row: convolutional activations with Fisher Vector encoding; bottom row: convolutional activations with our FV-VAE encoding). tation), CNNs also manifest impressive performances. The improvements are expected when CNNs are further finetuned with only amount of task-specific training data. The activations of different layers in CNN are generally grouped into two dimensions: global activations and convolutional activations. The former directly take activations of the fully-connected layer as visual representations, which are holistic over the entire image as shown in the upper row of Figure 1. The latter, in contrast, create visual representations by encoding a set of regional and local activations from a convolutional layer to a vectorial representation using quantization strategies, e.g., FV [24] is one of the most successful quantization approaches, as illustrated in the middle row of Figure 1. While superior results by aggregating convolutional activations are reported in most recent studies [3, 45], convolutional activations are first extracted as local descriptors followed by another separate quantization step. Thus such descriptors may not be optimally compatible with the encoding process, making the quantization sub-optimal. Furthermore, as discussed in [14], the generative model behind of FV, i.e., Gaussian Mixture Model (GMM), cannot always represent the natural clustering of the descriptors and its inflexible Gaussian
2 observation model limits its generalization ability. We show in this paper that these two limitations can be mitigated by designing a deep architecture for representation learning that combines convolutional activations extraction and quantization into a one-stage learning. Specifically, we present a novel Fisher Vector encoding with Variational Auto-Encoder (FV-VAE) framework to encode convolutional activations with deep generative model (i.e., Variational Auto Encoder), as shown in the bottom row of Figure 1. The pipeline of the proposed deep architecture generally consists of two components: a sub-network with a stack of convolution layers to produce convolutional activations followed by a VAE structure aggregating the regional convolutional descriptors to a FV. VAE consists of hierarchies of conditional stochastic variables and is a highly expressive model by optimizing a variational approximation (an inference/recognition model) to the intractable posterior for the generative distribution. Compared to traditional GMM model which has the form of a mixture of fixed Gaussian components, the inference model here can be regarded as an alternative to predict specific Gaussian components to different inputs by a single neural network, making it more flexible. It is also worth noting that a classification loss is additionally considered to preserve the semantic information in the training stage. The entire architecture is trainable in an end-to-end fashion. Furthermore, in the feature extraction stage, we theoretically prove that the FV of input descriptors can be directly computed by accumulating the gradient vector of reconstruction loss in VAE through back-propagation. The main contribution of this work is the proposal of FV- VAE architecture to encode convolutional descriptors with Variational Auto-Encoder. We theoretically formulate the computation of FV in VAE and substantiate an implementation of FV-VAE for visual representation learning. 2. Related Work In the literature, visual representation generation from a pre-trained CNN model has proceeded along two dimensions: global activations and convolutional activations. The first is to extract visual representation from global activations in a CNN directly, e.g., the outputs from fullyconnected layer in AlexNet [20] / VGG [30] or pool5 layer in GoogleNet [33] / ResNet [8]. In practice, this scheme often starts by pre-training CNN model on a large dataset (e.g., ImageNet) and then fine-tuning the CNN architecture with a small amount of task-specific data to better characterize the intrinsic information in target scenario. The visual representation learnt in this direction has been exploited in a broad range of computer vision tasks including fine-grained image classification [1, 19], video action recognition [16, 29] and visual captioning [37, 39]. Another alternative scheme is to utilize the activations from convolutional layers in CNN as regional and local descriptors. Compared to global activations, convolutional activations from CNN are embedded with rich spatial information, making them more transferable to different domains and more robust to translation and rotation, which have shown the effectiveness in several technological advances, e.g., Spatial Pyramid Pooling (SPP) [7], Fast R- CNN [6] and Fully Convolutional Networks (FCNs) [23]. Recently, many works attempt to produce visual representation by encoding convolutional activations with different quantization strategies. For example, Fisher Vector [24] is computed on the output of the last convolutional layer of VGG networks for describing texture in [3]. Similar in spirit, Xu et al. utilize VLAD [12] to encode convolutional descriptors of video frame for multimedia event detection [45]. In [28] and [44], Sharma et al. and Xu et al. dynamically pool convolutional descriptors with attention models for action recognition and image captioning, respectively. Furthermore, convolutional descriptors of one convolutional layer are pooled with the guidance of the activations of the successive convolutional layer in [22]. In [5] and [21], convolutional descriptors from two CNNs are multiplied using the outer product and pooled to obtain the bilinear vector. In summary, our work belongs to the second dimension and aims to compute FV on convolutional activations with deep generative models. We exploit Variational Auto- Encoder for this purpose, which optimizes an inference model to the intractable posterior. The high flexibility of the inference model and efficiency of the structure optimization makes VAE more advanced than traditional GMM. Our work in this paper contributes by studying not only encoding convolutional activations in a deep architecture, but also theoretically figuring out the computation of FV based on VAE architecture. 3. Fisher Vector Meets VAE In this section, we first recall the Fisher Vector theory, followed by presenting how to estimate the probability density function in FV through VAE. The optimization of VAE is then elaborated and how to compute the FV of the input descriptors will be introduced finally Fisher Vector Theory Suppose we have two sets of local descriptors X = {x t } Tx t=1 and Y = {y t} Ty t=1 with T x and T y descriptors, respectively. Let x t, y t R d denote the d-dimensional features of each descriptor. In order to measure the similarity between the two sets, kernel method is employed by mapping them into a hyperspace. Specifically, assuming that the generation process of descriptors in R d can be modeled by a probability density function u θ with M parameters θ = [θ 1,, θ M ], Fisher Kernel (FK) [10] between
3 x t x t Encoder Sampling Decoder (a) VAE Training Encoder Identity Decoder (b) FV Extraction Back Propagation Gradient Vector Accumulator Reconstruction Loss Regularization Loss Classification Loss Reconstruct Loss Figure 2. The overview of FV learning with VAE: (a) The training process of VAE, (b) FV extraction based on VAE. the two sets X and Y is given by K(X, Y ) = G X θ F 1 θ G Y θ, (1) where G X θ = θ log u θ (X) is defined as fisher score function by computing the gradient of the log-likelihood of the set based on the generative model, and F θ = E X uθ [G X θ GX θ ] is the Fisher Information Matrix (FIM) of u θ which is regarded as statistical feature normalization. Since F θ is positive semi-definite, the FK in Eq.(1) can be re-written explicitly as inner product in hyperspace: Algorithm 1 Variational Auto-Encoding (VAE) Optimization 1: Input: training set X = {x t} Tx t=1, corresponding labels L = {l t} Tx t=1, loss weights λ1, λ2, λ3. 2: Initialization: random initialized θ 0, φ 0. 3: Output: VAE parameters θ, φ. 4: repeat 5: Sample x t in the minibatch. 6: Encoder: µ zt f φ (x t). 7: Sampling: z t µ zt + ɛ σ z, ɛ N (0, I). 8: Decoder: µ xt f θ (z t). 9: Compute reconstruction loss: L rec = log p θ (x t z t) = log N (x t; µ xt, σ 2 xi). 10: Compute regularization loss: L reg = 1 µzt σz 1 d 2 2 k=1 (1 + log σ2 z,d). 11: Compute classification loss: L cls = softmax loss(z t, l t). 12: Fuse the three loss: L(θ, φ) = λ 1L rec(θ, φ) + λ 2L reg(φ) + λ 3L cls (φ). 13: Back-propagate the gradients. 14: until maximum iteration reached. and difficult to be applied to large-scale complex data. Inspired by the idea of deep generative models [18, 25] which enable the flexible and efficient inference learning in a neural network, we develop a Variational Auto-Encoder (VAE) to generate the probability function u θ. Following the notations in Section 3.1 and assuming that all the descriptors in the set are independent, the loglikelihood of the set can be calculated by the sum over loglikelihoods of individual descriptor and written as log u θ (X) = T x t=1 log p θ (x t). (4) where K(X, Y ) = Gθ X G Y θ, (2) G X θ = F 1 2 θ G X θ = F 1 2 θ θ log u θ (X). (3) Formally, Gθ X is well-known as Fisher Vector (FV). The dimension of FV is equal to the number of generative parameters θ, which is often much higher than that of the descriptor, making FV of higher descriptive capability Probability Estimation through VAE Next, we will discuss how to estimate the probability density function u θ in FV. In general, u θ is chosen to be Gaussian Mixture Model (GMM) [27, 41] as one can approximate any distribution with arbitrary precision by GMM, in which θ is composed of mixture weight, mean and covariance of Gaussian components. The need of a large number of mixture components and inefficient optimization of Expectation Maximization algorithm, however, makes the parameter learning computationally expensive To model the probability of x t generated from parameters θ, an unobserved continuous random variable z t is involved with prior distribution p θ (z) and each x t is generated from the conditional distribution p θ (x z). As such, each log-likelihood log p θ (x t ) can be measured as log p θ (x t) = D KL(q φ (z x t) p θ (z x t)) + LB(θ, φ; x t), (5) LB(θ, φ; x t) where LB(θ, φ; x t ) is the variational lower bound on the likelihood of descriptor x t and can be written as LB(θ, φ; x t) = D KL(q φ (z x t) p θ (z))+e qφ (z x t )[log p θ (x t z)], (6) where q φ (z x) is a recognition model which is an approximation to the intractable posterior p θ (z x). In our proposed FV-VAE method, we use this lower bound LB(θ, φ; x t ) as an approximation of the log-likelihood. Through this approximation, the generative model can be divided into two parts: encoder q φ (z x) and decoder p θ (x z), predicting hidden and visible probability, respectively.

, (2 2) and (1 1) outputs for each convolutional filter, resulting a total of 50 descriptors.")


 and N (z t ; µ zt, σ 2 z t I), respectively. The one-step Monte Carlo is exploited to estimate the latent variable z t.")
 can be rewritten as LB(θ, φ; x t) log p θ (x t z t) + 1 d (1 + log σz 2 2 t,d) k=1, (7) 1 µzt 1 2 2 σz t where z t is generated from N (µ zt, σ 2 z t I) and it is equivalent to z t = µ zt + ɛ σ")
4 Video Classification 224x224 CNN Convolutional Activations SPP 50/frame FV-VAE Loss Function Ice Dancing/ Albatross Training Epoch 448x448 CNN Convolutional Activations Denser Grid (28x28) 784/image Local Feature Set Gradient Vector + Extraction Epoch Visual Representation Image Classification Figure 3. Visual representation learning framework for image and video recognition. Spatial Pyramid Pooling (SPP) is performed on the last pooling layer of CNN to aggregate the local descriptors of video frame, which applies four different max pooling operations and obtain (6 6), (3 3), (2 2) and (1 1) outputs for each convolutional filter, resulting a total of 50 descriptors. For image, an input with a higher resolution of ( ) is fed into the CNN and the activations of the last convolutional layer conv 5 4+relu in VGG 19 are extracted, leading to dense local descriptors of for VGG 19. In training stage, FV-VAE architecture is learnt by minimizing the overall loss. In extraction epoch, the learnt FV-VAE is to encode the set of local descriptors into a vectorial FV representation VAE Optimization The inference model parameter φ and generative model parameter θ are straightforward to be optimized using stochastic gradient descend method. More specifically, let the prior distribution be the standard normal distribution p θ (z) = N (z; 0, I), and both the conditional distribution p θ (x z) and posterior approximation q φ (z x) be multivariate Gaussian distribution N (x t ; µ xt, σ 2 x t I) and N (z t ; µ zt, σ 2 z t I), respectively. The one-step Monte Carlo is exploited to estimate the latent variable z t. Hence, the lower bound in Eq. (6) can be rewritten as LB(θ, φ; x t) log p θ (x t z t) + 1 d (1 + log σz 2 2 t,d) k=1, (7) 1 µzt σz t where z t is generated from N (µ zt, σ 2 z t I) and it is equivalent to z t = µ zt + ɛ σ zt,ɛ N (0, I). Figure 2(a) illustrates an overview of our VAE training process and Algorithm 1 further details the optimization steps. It is also worth noting that different from the training of standard VAE method which estimates σ x and σ z in another parallel encoder-decoder structure, we simply learn the two covariance by gradient descent technique and share them across all the descriptors, making the number of parameters learnt in VAE significantly reduced in our case. In addition to the basic reconstruction loss and regularization loss, we further take classification loss into account in our VAE training to incorporate semantic information, which has been shown effective in semi-supervised generative model learning [17]. The overall loss function is then given by L(θ, φ) = λ 1L rec(θ, φ) + λ 2L reg(φ) + λ 3L cls (φ). (8) We fix λ 1 = λ 2 = 1 in Eq. (8) and will investigate the effect of tradeoff parameter λ 3 in our experiments. During the training, the gradients are calculated and back-propagate to the lower layers so that lower layers can adjust their parameters to minimize the loss FV Extraction After the optimization of model parameters [θ, φ ], Figure 2(b) demonstrates how to extract Fisher Vector based on the learnt VAE architecture. By replacing the log-likelihood with its approximation, i.e., lower bound LB(θ, φ; x t ), we can obtain FV in Eq. (3): Gθ X = F 2 1 θ θ log u θ (X) = F 1 2 θ T x t=1, (9) [ θ L rec(x t; θ, φ )] which is the normalized gradient vector of reconstruction loss, and can be computed directly though the back propagation operation. It is worth noticing that when extracting FV representation, we withdraw the sampling operation and use µ zt as z t directly to avoid stochastic factors. 4. Visual Representation Learning By utilizing FV-VAE as a deep architecture for quantization, a general visual representation learning framework is devised for image and video recognition, respectively, as illustrated in Figure 3. The basic idea is to construct a set of convolutional descriptors for image or video frames, followed by encoding them into a vectorial FV representation using FV-VAE architecture. Both the training epoch and FV extraction epoch are shown in Figure 3 and the entire framework is trainable in an end-to-end manner.
5 We exploit different strategies of aggregation to construct the set of convolutional descriptors for video frames and image, respectively, due to the different property in between. A video consists of a sequence of frames with large intra-class variations caused by, e.g., camera motion, illumination conditions and so on, making the scale of an identical object varying in different frames. Following [45], we employ Spatial Pyramid Pooling (SPP) [7] on the last pooling layer to extract scale-invariant local descriptors for video frames. Instead, we feed a higher resolution (e.g., ) input into the CNN to fully utilize image information and extract the activations of the last convolutional layer (e.g., conv 5 4 +relu in VGG 19), resulting in dense local descriptors (e.g., 28 28) for image as in [21]. In our implementation, Multi-Layer Perceptron (MLP) is employed as encoder and decoder in FV-VAE and one layer decoder is developed to reduce the dimension of FV representation. As such, the functions in Algorithm 1 can be specified as Encoder : µ zt MLP φ (x t) Decoder : µ xt ReLU(W θz t + b θ ), (10) where {W θ, b θ } are the encoder parameters θ. The gradient vector of L rec is calculated as { } θ L rec(x t; θ, φ ) = flatten [ Lrec, Lrec ] W φ b θ { } = flatten [ Lrec z t, Lrec ] µ xt µ xt { }, Lrec = flatten [z t, 1] µ xt { } µxt x t = flatten (µ σ 2 xt > 0) [z t, 1] x (11) where flatten represents to flatten a matrix to a vector, and denotes element-wise multiplication to filter the activated elements. Considering it is difficult to obtain an analytic solution of FIM in this case, we make an approximation by replacing the expectation with the average on the whole training set: and F θ = E X uθ [G X θ G X θ G X θ = flatten { F 1 2 θ ] mean X [GX θ G X θ ], (12) Tx ( µ } x t x t (µ xt > 0) [z t, 1]), t=1 (13) which is the output FV representation in our framework. To improve the convergence speed and better regularize the visual representation learning for video, we train this framework by inputting one single video frame rather than multiple ones, which is randomly sampled from videos. In the FV extraction stage, the video-level representation can σ 2 x Table 1. Methodology comparison of different quantization. Quantization indicator descriptor FV [24] Gaussian observation model gradient with respect to GMM parameters VLAD [12] clustering center difference to the assigned center BP [21] local feature coordinate representation FV-VAE VAE hidden variable gradient of reconstruction loss be easily obtained by averaging FVs of all the frames sampled from the video since FV in Eq. (13) is linear additive. 5. Experiments We evaluate the learnt visual representation by FV-VAE architecture on three popular datasets, i.e., UCF101 [31], ActivityNet [2] and CUB [40]. The UCF101 dataset is one of the most popular video action recognition benchmarks. It consists of 13,320 videos from 101 action categories. The action categories are divided into five groups: human-object interaction, body-motion only, human-human interaction, playing musical instruments and sports. Three training/test splits are provided by the dataset organisers and each split in UCF101 includes about 9.5K training and 3.7K test videos. The ActivityNet dataset is a large-scale video benchmark for human activity understanding. The latest released version of the dataset (v1.3) is exploited, which contains 19,994 videos from 200 activity categories. The 19,994 videos are divided into 10,024, 4,926, 5,044 videos for training, validation and test set, respectively. Note that the labels of test set are not publicly available and the performances on ActivityNet dataset are all reported on validation set. Furthermore, we also validate the representation on CUB dataset, which is widely adopted for fine-grained image classification and consists of 11,788 images from 200 bird species. We follow the official split on this dataset with 5,994 training and 5,794 test images Compared Approaches To empirically verify the merit of visual representation learnt by FV-VAE, we compare the following quantization methods: Global Activations (GA) directly utilizes the outputs of fully-connected/pooling layer as visual representation. Fisher Vector (FV) [24] produces the visual representation by concatenating the gradients with respect to the parameters of GMM, which is trained on local descriptors. Vector of Locally Aggregated Descriptors (VLAD) [12] is to accumulate, for each clustering center learnt with K- means, the differences between the clustering center and the descriptors assigned to it, and then concatenates the accumulated vector of each center as quantized representation.
6 Bilinear Pooling (BP) [21] pools local descriptors in a pairwise manner by outer product. In our case, one local descriptor pairs with itself. To better illustrate the difference between the compared approaches, we details the methodology in Table 1. In particular, we decouple the quantization process into two parts: indicator and descriptor. Indicator refers to observations/distributions estimated on the whole set of local descriptors and descriptor is to represent the set with respect to the indicator Experimental Settings Convolutional activations. On video action recognition task, we extract two widely adopted convolutional activations, i.e., activations of pool5 layer in VGG 19 [30] and res5c layer in ResNet 152 [8]. Given a video frame as input, the outputs of the two layers are both 7 7 and the dimension of each activation is 512 and 2,048, respectively. For each video, 25 frames are uniformly sampled for representation extraction. On image classification problem, we feed image into VGG 19 and the activations of conv 5 4 +relu layer are exploited, which produce convolutional descriptors. VAE optimization. To make the training process of VAE stable, we first exploit L2 normalization on each convolutional activation to make the input to VAE in a common scale. Following [9, 38], dropout is then employed to randomly drop out units input to the encoder but the autoencoder is optimized to reconstruct a complete repaired input. The dropout rate is fixed to 0.5. Furthermore, we utilize AdaDelta [47] optimization method implemented in Caffe [13] to normalize the gradient of each parameters for balancing their converge speed. The base learning rate is set to 1 and the size of mini-batch is 128 images/frames. The optimization will be complete after 5,000 batches. Quantization settings. For our FV-VAE, given the local descriptor with dimension C (C {512, 2048}), we design a two-layer encoder (C C 255) to reduce the dimension to 255, coupled with a single layer decoder (255 C). The dimension of the final quantized representation is 256 C. For FV and VLAD, we follow the settings in [3] and [45]. Specifically, 128 Gaussian components for FV and 256 clustering centers for VLAD are exploited. As such, the dimension of representations encoded by FV and VLAD will also be 256 C. The two quantization approaches are implemented by VLFeat [36]. Classifier training. After representation learning by all the methods in our experiments, we apply signed squareroot step (sign(x) x ) and L2 normalization (x/ x 2 ) as in [3, 21, 24, 45], and then train a one-vs-all linear SVM with a fixed hyperparameter C svm = 100. Table 2. Performance comparisons of different quantization methods on UCF101 split1 with default VGG 19 network. Feature Dimension Accuracy GA % Concatenation % AVE % FV % VLAD % BP % FV-VAE % FV-VAE % 5.3. Performance Comparison Comparison with different quantization methods. We first examine our FV-VAE and compare with other quantization methods. In addition to the four mentioned quantization methods, we also include three runs: Concatenation, AVE and FV-VAE. Concatenation is to flatten the activations of pool5 layer and concatenate into a super vector, whose dimension is ( ). The representation in AVE is produced by average fusing the dimensional convolutional activations in pool5 layer. A slightly different setting of our FV-VAE is named as FV- VAE, in which the classification loss in Eq.(8) is excluded or λ 3 is set to 0. The performances and comparisons with default VGG 19 network on UCF101 (split 1) are summarized in Table 2. Overall, the results indicate that our FV-VAE leads to a performance boost against others. In particular, the accuracy of FV-VAE can achieve 83.45%, which makes the relative improvement over the best competitor BP by 2.5%. Meanwhile, the dimension of representation learnt by FV-VAE is only half of that of BP. There is a performance gap among three runs GA, Concatenation and AVE. Though three runs all directly originate from pool5 layer, they are fundamentally different in the way of generating frame representation. The representation of GA is as a result of flatting all kernel maps in pool5 to the neurons in a fully-connected layer, while Concatenation and AVE is by directly concatenating convolutional descriptors or average fusing them in pool5 layer. As indicated by our results, Concatenation can lead to better performance than GA and AVE. VLAD outperforms FV on UCF101, but the performance is still lower than BP. Compared to FV which produces representation with respect to a number of Gaussian mixture components, FV-VAE will learn which Gaussian distribution is needed for the input specific descriptor by an inference neural network, making FV-VAE more flexible. Therefore, FV-VAE performs significantly better than FV. More importantly, FV-VAE is trainable in an end-to-end fashion. By additionally incorporating semantic information, FV-VAE leads to apparent improvement against FV- VAE. Furthermore, by reducing the dimension of latent variable to 7, the visual representations produced by FV-
7 Table 3. Performance comparisons of FV-VAE with local activations from different networks on UCF101 split1. Network GA FV-VAE FV-VAE pool % 81.91% 83.45% pool5 fine-tuned 79.06% 82.05% 82.13% res5c 81.57% 85.05% 86.33% Table 4. Performance comparisons with the state-of-the-art methods on UCF101 (3 splits, 10 augmentation). C3D: Convolutional 3D [34]; TSN: Temporal Segment Networks; TDD: Trajectorypooled Deep-convolutional Descriptor [42]; IDT: Improved Dense Trajectory [41]. Method Accuracy Two-stream ConvNet [29] 88.1% C3D (3 nets) [34] 85.2% Factorized ST-ConvNet [32] 88.1% Two-stream + LSTM [46] 88.6% Two-stream fusion [4] 92.5% Long-term temporal ConvNet [35] 91.7% Key-volume mining CNN [50] 93.1% TSN (3 modalities) [43] 94.2% IDT [41] 85.9% C3D + IDT [34] 90.4% TDD + IDT [42] 91.5% Long-term temporal ConvNet + IDT [35] 92.7% FV-VAE-pool5 83.9% FV-VAE-pool5 optical flow 89.5% FV-VAE-res5c 86.6% FV-VAE-(pool5 + pool5 optical flow) 93.7% FV-VAE-(res5c + pool5 optical flow) 94.2% FV-VAE-(res5c + pool5 optical flow) + IDT 95.2% VAE and GA are then with the same dimension of 4,096. In this case, the accuracy of FV-VAE can still achieve 78.37% which is higher than 74.91% by GA, again demonstrating the effectiveness of our FV-VAE. In addition, similar performance trends are observed at CUB dataset, as shown in the upper rows of Table 6, in two protocols of where the object bounding boxes are provided or not. Comparison with different networks. Next, we turn to measure the performance comparison on UCF101 split1 of our FV-VAE with local activations from different networks, including pool5 layer in VGG 19 and fine-tuned VGG 19 using video frames respectively, and res5c layer in ResNet 152. Compared to pool5 in VGG 19, FV-VAE on the outputs of res5c layer in ResNet 152 with a deeper CNN exhibits better performance. An interesting observation is that GA and FV-VAE performs better on the outputs of pool5 layer in fine-tuned VGG 19 than that in VGG 19, while reverse trend is indicated by using FV-VAE. We speculate that this may be the result of overfitting in fine-tuning with UCF101, which in particular affects the descriptive ability of convolutional layers. This result also indicates the advantage of exploring semantic information in FV-VAE training based on the outputs of a general network than a fine-tuned one. Table 5. Performance comparisons in terms of Top-1&Top-3 classification accuracy, and mean AP on ActivityNet validation set. Methods Top-1 Top-3 MAP VGG 19-GA [30] 66.59% 82.70% 70.22% ResNet 152-GA [8] 71.43% 86.45% 76.56% C3D-GA [34] 65.80% 81.16% 67.68% IDT [41] 64.70% 77.98% 68.69% FV-VAE-pool % 85.68% 77.25% FV-VAE-res5c 78.55% 91.16% 84.09% Table 6. Performance comparisons on CUB in two scenarios: where the object bounding boxes are provided at training and test time or not. ft: fine-tuning. Methods dim w/o ft w ft +box w/o ft +box w ft GA 4k 61.0% 70.4% 65.3% 76.4% FV 128k 70.8% 74.0% 73.6% 77.1% VLAD 128k 73.5% 76.5% 75.1% 79.8% BP 256k 75.2% 78.0% 76.9% 80.8% FV-VAE 128k 79.3% 82.4% 79.5% 83.6% Previous work 84.5%[49] 84.1%[21] 84.1%[11] 82.0%[19] 75.7%[1] 73.9%[48] 85.1%[21] 82.8%[19] 76.4%[48] 73.0%[3] Comparison with the state-of-the-art. We compare with several state-of-the-art techniques on three splits of UCF101, ActivityNet validation set and CUB The performance comparisons are summarized in Table 4, 5 and 6, respectively. It is worth noting that most recent works on UCF101 employ and fuse two or multiple modalities. For fair comparison, two basic and widely adopted modalities, i.e., video frame and optical flow image, are considered as inputs to our visual representation framework and late fusion is used to combine classifier scores on the two modalities. As shown in Table 4, FV-VAE on activations from pool5 layer in VGG 19 with image and optical flow inputs can achieve 93.7%, which makes the relative improvement over two-stream networks [29], [46] and [4] by 6.3%, 5.7% and 1.3%, respectively. When exploiting the outputs of res5c layer in ResNet 152 on image inputs as instead, the accuracy will be further improved to 94.2%. By combining with IDT which are hand-crafted features, our final performance will boost up to 95.2%, which is to-date the best published performance on UCF101. The results across different evaluation metrics consistently indicate that visual representation produced by our FV-VAE leads to a performance boost against baselines on ActivityNet validation set, as shown in Table 5. More specifically, FV-VAE on the outputs of pool5 in VGG 19 and res5c in ResNet 152 outperforms GA from VGG 19 and ResNet 152 by 10.0% and 9.8% in terms of map, respectively. Furthermore, the representation learnt by FV- VAE only on visual appearance of video frame also exhibits better performance than GA representation from C3D and IDT motion features which additionally explore temporal information in videos.
8 Percentage on accuracy VLAD FV FV-VAE FV-VAE Percentage on accuracy pool5 pool5 fine-tuned res5c Percentage on accuracy RM Latent Variable Reduction PCA Feature dimension (log2) (a) λ3 in Eq. (8) (log10) (b) Feature dimension (log2) Figure 4. Experimental analysis: (a) The accuracy of visual representation with different dimensions learnt by different quantization methods. (b) The accuracy curve of FV-VAE on activations from different networks with different λ 3 in Eq.(8). (c) The accuracy of different feature compression methods on representation learnt by FV-VAE. Note that all the performances reported in this figure are on UCF101 split1 and similar performance trends are observed at the other two datasets. (c) 12 Fine-tuning VGG 19 on CUB for FV-VAE generally performs better than original VGG 19 on both protocols of where the object bounding boxes are given or not, as shown in Table 6. Overall, the representation learnt by FV-VAE leads to a performance boost against some baselines, e.g., [19] which extracts representation on local regions learnt by co-segmentation and [1] which combines the representations from three networks fed by warped bird head, warped body and entire image, respectively. It is not surprise that FV-VAE yields inferior performance to the other baselines, as the representation learnt by our FV-VAE is for general purpose while contributions of different regions in particular for fine-grained classification are taken into account in these methods. For instance, a saliency weight is learnt and assigned to each local region in [49], and a spatial transformer is trained to reduce the effect of translation and rotation as preprocess in [11]. More importantly, the importance estimation of each local region can be easily integrated into our framework as spatial attention Experimental Analysis The effect of representation dimension. Figure 4(a) compares the accuracy of learnt representations with different dimensions by changing the number of latent variable in FV-VAE, the number of centroids in VLAD and mixture components in FV. Overall, visual representation learnt by FV-VAE consistently outperforms others at each dimension from 2 12 to In general, higher dimensional representations provide better accuracy, except that the accuracy of representation learnt by FV will decrease when the dimension is higher than 2 15, which may caused by overfitting. The result basically indicates the advantage of predicting Gaussian parameters by a neural network in our FV-VAE. The effect of tradeoff parameter λ 3. A common problem with combination of multiple loss is the need to set the tradeoff parameters in between. Figure 4(b) shows the accuracy of FV-VAE with respect to different λ 3 in Eq.(8), which reflects the contribution of leveraging semantic information. As expected, the accuracy curves are all like the shapes when λ 3 varies from 10 0 to Feature compression. Figure 4(c) compares the performance obtained by applying different representation compression methods: (1) Random Maclaurin (RM) [15], (2) PCA dimension reduction and (3) reducing the number of latent variable in VAE. Compared to RM and PCA which separately learn a transformation for feature compression, we can reduce the dimension of the learnt FV in VAE framework by decreasing the number of latent variable. As indicated by our results, reducing the number of latent variable always achieves the best accuracy, which again confirms the high flexibility of VAE. 6. Conclusion We have presented Fisher Vector with Variational Auto- Encoder (FV-VAE) architecture which aims to quantize the convolutional activations in a deep generative model. Particularly, we theoretically formulate the computation of FV in VAE architecture. To verify our claim, a general visual representation learning framework is devised by integrating our FV-VAE architecture and an implementation of FV- VAE is also substantiated for image and video recognition. Experiments conducted on on three public datasets, i.e., UCF101, ActivityNet, and CUB in the context of video action recognition and fine-grained image classification validate our proposal and analysis. Performance improvements are clearly observed when comparing to other quantization techniques. Our future works are as follows. First, a deeper autoencoder architecture will be explored in our FV-VAE architecture. Second, attention mechanism will be explicitly incorporated into our FV-VAE for further enhancing visual recognition. Third, Generative Adversarial Networks (GAN) will be investigated to better learn a generative model and integrated into representation learning.

















.")







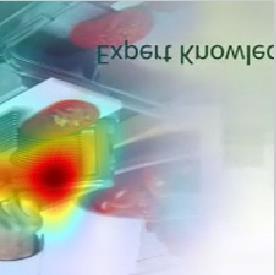


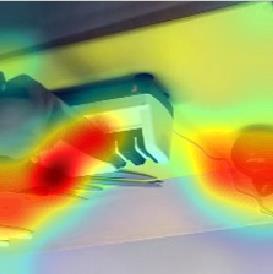



9 Table 7. The detailed architecture of our FV-VAE. The operation, the spatial dimension and the number of output channels are given for each layer. Layers 1 3 are pre-processing steps for the purpose of stable optimization. Layers 4 5 are encoder and layer 7 is decoder in VAE. Task input video action recognition pool5 L2 norm spp dropout 1 1conv+relu 1 1conv sampling 1 1conv+relu spatial dim #channel video action recognition res5c L2 norm spp dropout 1 1conv+relu 1 1conv sampling 1 1conv+relu spatial dim #channel fine-grained image classification conv 5 4+relu L2 norm dropout 1 1conv+relu 1 1conv sampling 1 1conv+relu spatial dim #channel Skijet --- UCF101 Sharpening Knives --- ActivityNet Figure 5. Feature visualization from the viewpoint of spatial and temporal attention for one video example in UCF101 and ActivityNet dataset respectively (Top row: sampled frames from the video, middle row: the curve of frame-level values, bottom row: region-level values in each frame). The sum of the absolute value of each element in the FV of one regional descriptor represents spatial attention of this region and then the sum of the value of each region in one frame is considered as temporal attention of that frame. We can see that it is able to concentrate attention to regions of interest, e.g., jet boat in the first video and sharpener in the second one, which highly infer the action Skijet and Sharpening Knives happening in the video. Moreover, it is also capable of predicting the contributions of different temporal frames. For example, frames with motion of a man is riding a jet boat in the first video or a man is sharpening a knife in the second video contribute more to the recognition. Appendix A. Network Architecture Table 7 details the hyper-parameters of our proposed FV- VAE. Specifically, three different architectures are listed on different tasks and convolutional activations from different layers, i.e., video action recognition on activations of pool5 layer in VGG 19 [30] and res5c layer in ResNet 152 [8], and fine-grained image classification on activations of conv 5 4 +relu layer in VGG 19.




 represents the importance of this")
 then manifests")

![Sharpening Knives category in UCF101 [31] test set and ActivityNet [2] validation set, respectively.](/docs-images/76/73217812/images/10-7.jpg "The video is represented by sampled frames in the top row.")



![Similar in spirit, Figure 6 visualizes region-level values of a few exemplary images in CUB-200-2011 [40]](/docs-images/76/73217812/images/10-11.jpg "test set. The image examples are from three bird species, i.e., Black-Footed Albatross, Groove-Billed Ani and Brewer Blackbird.")


![Bird species categorization using pose normalized deep convolutional nets. In BMVC, 2014. 2, 7, 8 [2] F.](/docs-images/76/73217812/images/10-14.jpg "Caba Heilbron, V. Escorcia, B. Ghanem, and J. Carlos Niebles.")
![Activitynet: A large-scale video benchmark for human activity understanding. In CVPR, 2015. 5, 10 [3] M.](/docs-images/76/73217812/images/10-15.jpg "Cimpoi, S. Maji, I. Kokkinos, and A. Vedaldi.")

![Convolutional two-stream network fusion for video action In CVPR, 2016. 7 [5] Y. Gao, O. Beijbom, N.](/docs-images/76/73217812/images/10-17.jpg "Zhang, and T. Darrell. Compact bilinear pooling. In CVPR, 2016. 2 [6] R. Girshick. Fast r-cnn.")
10 Black-Footed Albatross Groove-Billed Ani Brewer Blackbird Figure 6. Feature visualization from the viewpoint of spatial attention for image examples in CUB dataset. The sum of the absolute value of each element in the FV of one regional descriptor represents spatial attention of this region. We can see that most of the high-value regions are beak, neck and wing of birds, where the parts highly indicate the category that a bird belongs to. B. Feature Visualization Recall that FV of each regional descriptor is the gradient vector of reconstruction loss, as discussed in Section 3.4. The absolute value of each element in the vector in fact reflects its degree of being reconstructed and thus the sum of the absolute value of each element (region-level value) represents the importance of this region to recognition. The importance map can be regarded as spatial attention. Furthermore, the sum of the value of each region in one video frame (frame-level value) then manifests its score in the whole video sequence, which can be considered as temporal attention. Figure 5 illustrates both region-level and frame-level values on one video example from Skijet and Sharpening Knives category in UCF101 [31] test set and ActivityNet [2] validation set, respectively. The video is represented by sampled frames in the top row. The curve of frame-level score is given in the middle row. The scores of temporal frames with clear motion of a man is riding a jet boat in the first video or a man is sharpening a knife in the second video are high, indicating that these frames contribute more to the recognition. In the bottom row, the regions of high values are around the object jet boat or sharpener, which is the key evidence of Skijet or Sharpening Knives category, respectively. Similar in spirit, Figure 6 visualizes region-level values of a few exemplary images in CUB [40] test set. The image examples are from three bird species, i.e., Black-Footed Albatross, Groove-Billed Ani and Brewer Blackbird. We can easily observe that most of the high-value regions are beak, neck and wing of birds, where the parts are found to be more helpful to differentiate one variety of bird from the other. In contrast, the regions around background (e.g., sea, grass, branches, rocks) receive low values. References [1] S. Branson, G. Van Horn, S. Belongie, and P. Perona. Bird species categorization using pose normalized deep convolutional nets. In BMVC, , 7, 8 [2] F. Caba Heilbron, V. Escorcia, B. Ghanem, and J. Carlos Niebles. Activitynet: A large-scale video benchmark for human activity understanding. In CVPR, , 10 [3] M. Cimpoi, S. Maji, I. Kokkinos, and A. Vedaldi. Deep filter banks for texture recognition, description, and segmentation. IJCV, 118(1):65 94, , 2, 6, 7 [4] C. Feichtenhofer, A. Pinz, and A. Zisserman. Convolutional two-stream network fusion for video action recognition. In CVPR, [5] Y. Gao, O. Beijbom, N. Zhang, and T. Darrell. Compact bilinear pooling. In CVPR, [6] R. Girshick. Fast r-cnn. In ICCV, [7] K. He, X. Zhang, S. Ren, and J. Sun. Spatial pyramid pooling in deep convolutional networks for visual recognition. In ECCV, , 5 [8] K. He, X. Zhang, S. Ren, and J. Sun. Deep residual learning for image recognition. In CVPR, , 2, 6, 7, 9 [9] D. J. Im, S. Ahn, R. Memisevic, and Y. Bengio. Denoising criterion for variational framework. In AAAI, [10] T. S. Jaakkola, D. Haussler, et al. Exploiting generative models in discriminative classifiers. In NIPS, [11] M. Jaderberg, K. Simonyan, A. Zisserman, et al. Spatial transformer networks. In NIPS, , 8 [12] H. Jégou, M. Douze, C. Schmid, and P. Pérez. Aggregating local descriptors into a compact image representation. In CVPR, , 5
11 [13] Y. Jia, E. Shelhamer, J. Donahue, S. Karayev, J. Long, R. Girshick, S. Guadarrama, and T. Darrell. Caffe: Convolutional architecture for fast feature embedding. In ACM MM, [14] M. J. Johnson, D. Duvenaud, A. B. Wiltschko, S. R. Datta, and R. P. Adams. Composing graphical models with neural networks for structured representations and fast inference. In NIPS, [15] P. Kar and H. Karnick. Random feature maps for dot product kernels. In AISTATS, [16] A. Karpathy, G. Toderici, S. Shetty, T. Leung, R. Sukthankar, and L. Fei-Fei. Large-scale video classification with convolutional neural networks. In CVPR, [17] D. P. Kingma, S. Mohamed, D. J. Rezende, and M. Welling. Semi-supervised learning with deep generative models. In NIPS, [18] D. P. Kingma and M. Welling. Auto-encoding variational bayes. In ICLR, [19] J. Krause, H. Jin, J. Yang, and L. Fei-Fei. Fine-grained recognition without part annotations. In CVPR, , 7, 8 [20] A. Krizhevsky, I. Sutskever, and G. E. Hinton. Imagenet classification with deep convolutional neural networks. In NIPS, [21] T.-Y. Lin, A. RoyChowdhury, and S. Maji. Bilinear cnn models for fine-grained visual recognition. In ICCV, , 5, 6, 7 [22] L. Liu, C. Shen, and A. van den Hengel. The treasure beneath convolutional layers: Cross-convolutional-layer pooling for image classification. In CVPR, [23] J. Long, E. Shelhamer, and T. Darrell. Fully convolutional networks for semantic segmentation. In CVPR, [24] F. Perronnin, J. Sánchez, and T. Mensink. Improving the fisher kernel for large-scale image classification. In ECCV, , 2, 5, 6 [25] D. J. Rezende, S. Mohamed, and D. Wierstra. Stochastic backpropagation and approximate inference in deep generative models. In ICML, [26] O. Russakovsky, J. Deng, H. Su, J. Krause, S. Satheesh, S. Ma, Z. Huang, A. Karpathy, A. Khosla, M. Bernstein, et al. Imagenet large scale visual recognition challenge. IJCV, 115(3): , [27] J. Sánchez, F. Perronnin, T. Mensink, and J. Verbeek. Image classification with the fisher vector: Theory and practice. IJCV, 105(3): , [28] S. Sharma, R. Kiros, and R. Salakhutdinov. Action recognition using visual attention. In ICLR Workshop, [29] K. Simonyan and A. Zisserman. Two-stream convolutional networks for action recognition in videos. In NIPS, , 7 [30] K. Simonyan and A. Zisserman. Very deep convolutional networks for large-scale image recognition. In ICLR, , 6, 7, 9 [31] K. Soomro, A. R. Zamir, and M. Shah. UCF101: A dataset of 101 human action classes from videos in the wild. CRCV- TR-12-01, , 10 [32] L. Sun, K. Jia, D.-Y. Yeung, and B. E. Shi. Human action recognition using factorized spatio-temporal convolutional networks. In ICCV, [33] C. Szegedy, W. Liu, Y. Jia, P. Sermanet, S. Reed, D. Anguelov, D. Erhan, V. Vanhoucke, and A. Rabinovich. Going deeper with convolutions. In CVPR, [34] D. Tran, L. Bourdev, R. Fergus, L. Torresani, and M. Paluri. Learning spatiotemporal features with 3d convolutional networks. In ICCV, [35] G. Varol, I. Laptev, and C. Schmid. Long-term temporal convolutions for action recognition. arxiv preprint arxiv: , [36] A. Vedaldi and B. Fulkerson. VLFeat: An open and portable library of computer vision algorithms. vlfeat.org/, [37] S. Venugopalan, M. Rohrbach, J. Donahue, R. Mooney, T. Darrell, and K. Saenko. Sequence to sequence-video to text. In ICCV, [38] P. Vincent, H. Larochelle, Y. Bengio, and P.-A. Manzagol. Extracting and composing robust features with denoising autoencoders. In ICML, [39] O. Vinyals, A. Toshev, S. Bengio, and D. Erhan. Show and tell: A neural image caption generator. In CVPR, [40] C. Wah, S. Branson, P. Welinder, P. Perona, and S. Belongie. The Caltech-UCSD Birds Dataset. Technical report, , 10 [41] H. Wang and C. Schmid. Action recognition with improved trajectories. In ICCV, , 7 [42] L. Wang, Y. Qiao, and X. Tang. Action recognition with trajectory-pooled deep-convolutional descriptors. In CVPR, [43] L. Wang, Y. Xiong, Z. Wang, Y. Qiao, D. Lin, X. Tang, and L. Van Gool. Temporal segment networks: towards good practices for deep action recognition. In ECCV, [44] K. Xu, J. Ba, R. Kiros, K. Cho, A. Courville, R. Salakhudinov, R. Zemel, and Y. Bengio. Show, attend and tell: Neural image caption generation with visual attention. In ICML, [45] Z. Xu, Y. Yang, and A. G. Hauptmann. A discriminative cnn video representation for event detection. In CVPR, , 2, 5, 6 [46] J. Yue-Hei Ng, M. Hausknecht, S. Vijayanarasimhan, O. Vinyals, R. Monga, and G. Toderici. Beyond short snippets: Deep networks for video classification. In CVPR, [47] M. D. Zeiler. Adadelta: an adaptive learning rate method. arxiv preprint arxiv: , [48] N. Zhang, J. Donahue, R. Girshick, and T. Darrell. Partbased r-cnns for fine-grained category detection. In ECCV, [49] X. Zhang, H. Xiong, W. Zhou, W. Lin, and Q. Tian. Picking deep filter responses for fine-grained image recognition. In CVPR, pages , , 8 [50] W. Zhu, J. Hu, G. Sun, X. Cao, and Y. Qiao. A key volume mining deep framework for action recognition. In CVPR,
Deep Quantization: Encoding Convolutional Activations with Deep Generative Model
 Deep Quantization: Encoding Convolutional Activations with Deep Generative Model Zhaofan Qiu, Ting Yao, and Tao Mei University of Science and Technology of China, Hefei, China Microsoft Research, Beijing,
Deep Quantization: Encoding Convolutional Activations with Deep Generative Model Zhaofan Qiu, Ting Yao, and Tao Mei University of Science and Technology of China, Hefei, China Microsoft Research, Beijing,
Learning Spatio-Temporal Features with 3D Residual Networks for Action Recognition
 Learning Spatio-Temporal Features with 3D Residual Networks for Action Recognition Kensho Hara, Hirokatsu Kataoka, Yutaka Satoh National Institute of Advanced Industrial Science and Technology (AIST) Tsukuba,
Learning Spatio-Temporal Features with 3D Residual Networks for Action Recognition Kensho Hara, Hirokatsu Kataoka, Yutaka Satoh National Institute of Advanced Industrial Science and Technology (AIST) Tsukuba,
arxiv: v1 [cs.cv] 14 Jul 2017
![arxiv: v1 [cs.cv] 14 Jul 2017](/thumbs/74/70463879.jpg "arxiv: v1 [cs.cv] 14 Jul 2017") Temporal Modeling Approaches for Large-scale Youtube-8M Video Understanding Fu Li, Chuang Gan, Xiao Liu, Yunlong Bian, Xiang Long, Yandong Li, Zhichao Li, Jie Zhou, Shilei Wen Baidu IDL & Tsinghua University
Temporal Modeling Approaches for Large-scale Youtube-8M Video Understanding Fu Li, Chuang Gan, Xiao Liu, Yunlong Bian, Xiang Long, Yandong Li, Zhichao Li, Jie Zhou, Shilei Wen Baidu IDL & Tsinghua University
Bilinear Models for Fine-Grained Visual Recognition
 Bilinear Models for Fine-Grained Visual Recognition Subhransu Maji College of Information and Computer Sciences University of Massachusetts, Amherst Fine-grained visual recognition Example: distinguish
Bilinear Models for Fine-Grained Visual Recognition Subhransu Maji College of Information and Computer Sciences University of Massachusetts, Amherst Fine-grained visual recognition Example: distinguish
In Defense of Fully Connected Layers in Visual Representation Transfer
 In Defense of Fully Connected Layers in Visual Representation Transfer Chen-Lin Zhang, Jian-Hao Luo, Xiu-Shen Wei, Jianxin Wu National Key Laboratory for Novel Software Technology, Nanjing University,
In Defense of Fully Connected Layers in Visual Representation Transfer Chen-Lin Zhang, Jian-Hao Luo, Xiu-Shen Wei, Jianxin Wu National Key Laboratory for Novel Software Technology, Nanjing University,
Aggregating Descriptors with Local Gaussian Metrics
 Aggregating Descriptors with Local Gaussian Metrics Hideki Nakayama Grad. School of Information Science and Technology The University of Tokyo Tokyo, JAPAN nakayama@ci.i.u-tokyo.ac.jp Abstract Recently,
Aggregating Descriptors with Local Gaussian Metrics Hideki Nakayama Grad. School of Information Science and Technology The University of Tokyo Tokyo, JAPAN nakayama@ci.i.u-tokyo.ac.jp Abstract Recently,
arxiv: v2 [cs.cv] 2 Apr 2018
![arxiv: v2 [cs.cv] 2 Apr 2018](/thumbs/91/106374014.jpg "arxiv: v2 [cs.cv] 2 Apr 2018") Depth of 3D CNNs Depth of 2D CNNs Can Spatiotemporal 3D CNNs Retrace the History of 2D CNNs and ImageNet? arxiv:1711.09577v2 [cs.cv] 2 Apr 2018 Kensho Hara, Hirokatsu Kataoka, Yutaka Satoh National Institute
Depth of 3D CNNs Depth of 2D CNNs Can Spatiotemporal 3D CNNs Retrace the History of 2D CNNs and ImageNet? arxiv:1711.09577v2 [cs.cv] 2 Apr 2018 Kensho Hara, Hirokatsu Kataoka, Yutaka Satoh National Institute
Channel Locality Block: A Variant of Squeeze-and-Excitation
 Channel Locality Block: A Variant of Squeeze-and-Excitation 1 st Huayu Li Northern Arizona University Flagstaff, United State Northern Arizona University hl459@nau.edu arxiv:1901.01493v1 [cs.lg] 6 Jan
Channel Locality Block: A Variant of Squeeze-and-Excitation 1 st Huayu Li Northern Arizona University Flagstaff, United State Northern Arizona University hl459@nau.edu arxiv:1901.01493v1 [cs.lg] 6 Jan
Proceedings of the International MultiConference of Engineers and Computer Scientists 2018 Vol I IMECS 2018, March 14-16, 2018, Hong Kong
 , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong TABLE I CLASSIFICATION ACCURACY OF DIFFERENT PRE-TRAINED MODELS ON THE TEST DATA
, March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong TABLE I CLASSIFICATION ACCURACY OF DIFFERENT PRE-TRAINED MODELS ON THE TEST DATA
Part Localization by Exploiting Deep Convolutional Networks
 Part Localization by Exploiting Deep Convolutional Networks Marcel Simon, Erik Rodner, and Joachim Denzler Computer Vision Group, Friedrich Schiller University of Jena, Germany www.inf-cv.uni-jena.de Abstract.
Part Localization by Exploiting Deep Convolutional Networks Marcel Simon, Erik Rodner, and Joachim Denzler Computer Vision Group, Friedrich Schiller University of Jena, Germany www.inf-cv.uni-jena.de Abstract.
Supplementary material for Analyzing Filters Toward Efficient ConvNet
 Supplementary material for Analyzing Filters Toward Efficient Net Takumi Kobayashi National Institute of Advanced Industrial Science and Technology, Japan takumi.kobayashi@aist.go.jp A. Orthonormal Steerable
Supplementary material for Analyzing Filters Toward Efficient Net Takumi Kobayashi National Institute of Advanced Industrial Science and Technology, Japan takumi.kobayashi@aist.go.jp A. Orthonormal Steerable
Deep Spatial Pyramid Ensemble for Cultural Event Recognition
 215 IEEE International Conference on Computer Vision Workshops Deep Spatial Pyramid Ensemble for Cultural Event Recognition Xiu-Shen Wei Bin-Bin Gao Jianxin Wu National Key Laboratory for Novel Software
215 IEEE International Conference on Computer Vision Workshops Deep Spatial Pyramid Ensemble for Cultural Event Recognition Xiu-Shen Wei Bin-Bin Gao Jianxin Wu National Key Laboratory for Novel Software
arxiv: v7 [cs.cv] 21 Apr 2018
![arxiv: v7 [cs.cv] 21 Apr 2018](/thumbs/90/103677812.jpg "arxiv: v7 [cs.cv] 21 Apr 2018") End-to-end Video-level Representation Learning for Action Recognition Jiagang Zhu 1,2, Wei Zou 1, Zheng Zhu 1,2 1 Institute of Automation, Chinese Academy of Sciences (CASIA) 2 University of Chinese Academy
End-to-end Video-level Representation Learning for Action Recognition Jiagang Zhu 1,2, Wei Zou 1, Zheng Zhu 1,2 1 Institute of Automation, Chinese Academy of Sciences (CASIA) 2 University of Chinese Academy
Aggregating Frame-level Features for Large-Scale Video Classification
 Aggregating Frame-level Features for Large-Scale Video Classification Shaoxiang Chen 1, Xi Wang 1, Yongyi Tang 2, Xinpeng Chen 3, Zuxuan Wu 1, Yu-Gang Jiang 1 1 Fudan University 2 Sun Yat-Sen University
Aggregating Frame-level Features for Large-Scale Video Classification Shaoxiang Chen 1, Xi Wang 1, Yongyi Tang 2, Xinpeng Chen 3, Zuxuan Wu 1, Yu-Gang Jiang 1 1 Fudan University 2 Sun Yat-Sen University
Structured Prediction using Convolutional Neural Networks
 Overview Structured Prediction using Convolutional Neural Networks Bohyung Han bhhan@postech.ac.kr Computer Vision Lab. Convolutional Neural Networks (CNNs) Structured predictions for low level computer
Overview Structured Prediction using Convolutional Neural Networks Bohyung Han bhhan@postech.ac.kr Computer Vision Lab. Convolutional Neural Networks (CNNs) Structured predictions for low level computer
Convolutional Neural Networks. Computer Vision Jia-Bin Huang, Virginia Tech
 Convolutional Neural Networks Computer Vision Jia-Bin Huang, Virginia Tech Today s class Overview Convolutional Neural Network (CNN) Training CNN Understanding and Visualizing CNN Image Categorization:
Convolutional Neural Networks Computer Vision Jia-Bin Huang, Virginia Tech Today s class Overview Convolutional Neural Network (CNN) Training CNN Understanding and Visualizing CNN Image Categorization:
DFT-based Transformation Invariant Pooling Layer for Visual Classification
 DFT-based Transformation Invariant Pooling Layer for Visual Classification Jongbin Ryu 1, Ming-Hsuan Yang 2, and Jongwoo Lim 1 1 Hanyang University 2 University of California, Merced Abstract. We propose
DFT-based Transformation Invariant Pooling Layer for Visual Classification Jongbin Ryu 1, Ming-Hsuan Yang 2, and Jongwoo Lim 1 1 Hanyang University 2 University of California, Merced Abstract. We propose
arxiv: v1 [cs.cv] 26 Jul 2018
![arxiv: v1 [cs.cv] 26 Jul 2018](/thumbs/88/117269915.jpg "arxiv: v1 [cs.cv] 26 Jul 2018") A Better Baseline for AVA Rohit Girdhar João Carreira Carl Doersch Andrew Zisserman DeepMind Carnegie Mellon University University of Oxford arxiv:1807.10066v1 [cs.cv] 26 Jul 2018 Abstract We introduce
A Better Baseline for AVA Rohit Girdhar João Carreira Carl Doersch Andrew Zisserman DeepMind Carnegie Mellon University University of Oxford arxiv:1807.10066v1 [cs.cv] 26 Jul 2018 Abstract We introduce
Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks
 Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks Si Chen The George Washington University sichen@gwmail.gwu.edu Meera Hahn Emory University mhahn7@emory.edu Mentor: Afshin
Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks Si Chen The George Washington University sichen@gwmail.gwu.edu Meera Hahn Emory University mhahn7@emory.edu Mentor: Afshin
A FRAMEWORK OF EXTRACTING MULTI-SCALE FEATURES USING MULTIPLE CONVOLUTIONAL NEURAL NETWORKS. Kuan-Chuan Peng and Tsuhan Chen
 A FRAMEWORK OF EXTRACTING MULTI-SCALE FEATURES USING MULTIPLE CONVOLUTIONAL NEURAL NETWORKS Kuan-Chuan Peng and Tsuhan Chen School of Electrical and Computer Engineering, Cornell University, Ithaca, NY
A FRAMEWORK OF EXTRACTING MULTI-SCALE FEATURES USING MULTIPLE CONVOLUTIONAL NEURAL NETWORKS Kuan-Chuan Peng and Tsuhan Chen School of Electrical and Computer Engineering, Cornell University, Ithaca, NY
An Exploration of Computer Vision Techniques for Bird Species Classification
 An Exploration of Computer Vision Techniques for Bird Species Classification Anne L. Alter, Karen M. Wang December 15, 2017 Abstract Bird classification, a fine-grained categorization task, is a complex
An Exploration of Computer Vision Techniques for Bird Species Classification Anne L. Alter, Karen M. Wang December 15, 2017 Abstract Bird classification, a fine-grained categorization task, is a complex
arxiv: v1 [cs.cv] 29 Apr 2016
![arxiv: v1 [cs.cv] 29 Apr 2016](/thumbs/94/120062841.jpg "arxiv: v1 [cs.cv] 29 Apr 2016") Improved Dense Trajectory with Cross Streams arxiv:1604.08826v1 [cs.cv] 29 Apr 2016 ABSTRACT Katsunori Ohnishi Graduate School of Information Science and Technology University of Tokyo ohnishi@mi.t.utokyo.ac.jp
Improved Dense Trajectory with Cross Streams arxiv:1604.08826v1 [cs.cv] 29 Apr 2016 ABSTRACT Katsunori Ohnishi Graduate School of Information Science and Technology University of Tokyo ohnishi@mi.t.utokyo.ac.jp
Eigen-Evolution Dense Trajectory Descriptors
 Eigen-Evolution Dense Trajectory Descriptors Yang Wang, Vinh Tran, and Minh Hoai Stony Brook University, Stony Brook, NY 11794-2424, USA {wang33, tquangvinh, minhhoai}@cs.stonybrook.edu Abstract Trajectory-pooled
Eigen-Evolution Dense Trajectory Descriptors Yang Wang, Vinh Tran, and Minh Hoai Stony Brook University, Stony Brook, NY 11794-2424, USA {wang33, tquangvinh, minhhoai}@cs.stonybrook.edu Abstract Trajectory-pooled
EasyChair Preprint. Real-Time Action Recognition based on Enhanced Motion Vector Temporal Segment Network
 EasyChair Preprint 730 Real-Time Action Recognition based on Enhanced Motion Vector Temporal Segment Network Xue Bai, Enqing Chen and Haron Chweya Tinega EasyChair preprints are intended for rapid dissemination
EasyChair Preprint 730 Real-Time Action Recognition based on Enhanced Motion Vector Temporal Segment Network Xue Bai, Enqing Chen and Haron Chweya Tinega EasyChair preprints are intended for rapid dissemination
Show, Discriminate, and Tell: A Discriminatory Image Captioning Model with Deep Neural Networks
 Show, Discriminate, and Tell: A Discriminatory Image Captioning Model with Deep Neural Networks Zelun Luo Department of Computer Science Stanford University zelunluo@stanford.edu Te-Lin Wu Department of
Show, Discriminate, and Tell: A Discriminatory Image Captioning Model with Deep Neural Networks Zelun Luo Department of Computer Science Stanford University zelunluo@stanford.edu Te-Lin Wu Department of
Multilayer and Multimodal Fusion of Deep Neural Networks for Video Classification
 Multilayer and Multimodal Fusion of Deep Neural Networks for Video Classification Xiaodong Yang, Pavlo Molchanov, Jan Kautz INTELLIGENT VIDEO ANALYTICS Surveillance event detection Human-computer interaction
Multilayer and Multimodal Fusion of Deep Neural Networks for Video Classification Xiaodong Yang, Pavlo Molchanov, Jan Kautz INTELLIGENT VIDEO ANALYTICS Surveillance event detection Human-computer interaction
REGION AVERAGE POOLING FOR CONTEXT-AWARE OBJECT DETECTION
 REGION AVERAGE POOLING FOR CONTEXT-AWARE OBJECT DETECTION Kingsley Kuan 1, Gaurav Manek 1, Jie Lin 1, Yuan Fang 1, Vijay Chandrasekhar 1,2 Institute for Infocomm Research, A*STAR, Singapore 1 Nanyang Technological
REGION AVERAGE POOLING FOR CONTEXT-AWARE OBJECT DETECTION Kingsley Kuan 1, Gaurav Manek 1, Jie Lin 1, Yuan Fang 1, Vijay Chandrasekhar 1,2 Institute for Infocomm Research, A*STAR, Singapore 1 Nanyang Technological
arxiv: v2 [cs.cv] 6 May 2018
![arxiv: v2 [cs.cv] 6 May 2018](/thumbs/84/90975684.jpg "arxiv: v2 [cs.cv] 6 May 2018") Appearance-and-Relation Networks for Video Classification Limin Wang 1,2 Wei Li 3 Wen Li 2 Luc Van Gool 2 1 State Key Laboratory for Novel Software Technology, Nanjing University, China 2 Computer Vision
Appearance-and-Relation Networks for Video Classification Limin Wang 1,2 Wei Li 3 Wen Li 2 Luc Van Gool 2 1 State Key Laboratory for Novel Software Technology, Nanjing University, China 2 Computer Vision
Deep Local Video Feature for Action Recognition
 Deep Local Video Feature for Action Recognition Zhenzhong Lan 1 Yi Zhu 2 Alexander G. Hauptmann 1 Shawn Newsam 2 1 Carnegie Mellon University 2 University of California, Merced {lanzhzh,alex}@cs.cmu.edu
Deep Local Video Feature for Action Recognition Zhenzhong Lan 1 Yi Zhu 2 Alexander G. Hauptmann 1 Shawn Newsam 2 1 Carnegie Mellon University 2 University of California, Merced {lanzhzh,alex}@cs.cmu.edu
arxiv: v2 [cs.cv] 23 May 2016
![arxiv: v2 [cs.cv] 23 May 2016](/thumbs/88/115196824.jpg "arxiv: v2 [cs.cv] 23 May 2016") Localizing by Describing: Attribute-Guided Attention Localization for Fine-Grained Recognition arxiv:1605.06217v2 [cs.cv] 23 May 2016 Xiao Liu Jiang Wang Shilei Wen Errui Ding Yuanqing Lin Baidu Research
Localizing by Describing: Attribute-Guided Attention Localization for Fine-Grained Recognition arxiv:1605.06217v2 [cs.cv] 23 May 2016 Xiao Liu Jiang Wang Shilei Wen Errui Ding Yuanqing Lin Baidu Research
Deep Learning in Visual Recognition. Thanks Da Zhang for the slides
 Deep Learning in Visual Recognition Thanks Da Zhang for the slides Deep Learning is Everywhere 2 Roadmap Introduction Convolutional Neural Network Application Image Classification Object Detection Object
Deep Learning in Visual Recognition Thanks Da Zhang for the slides Deep Learning is Everywhere 2 Roadmap Introduction Convolutional Neural Network Application Image Classification Object Detection Object
Multi-Glance Attention Models For Image Classification
 Multi-Glance Attention Models For Image Classification Chinmay Duvedi Stanford University Stanford, CA cduvedi@stanford.edu Pararth Shah Stanford University Stanford, CA pararth@stanford.edu Abstract We
Multi-Glance Attention Models For Image Classification Chinmay Duvedi Stanford University Stanford, CA cduvedi@stanford.edu Pararth Shah Stanford University Stanford, CA pararth@stanford.edu Abstract We
Large-scale gesture recognition based on Multimodal data with C3D and TSN
 Large-scale gesture recognition based on Multimodal data with C3D and TSN July 6, 2017 1 Team details Team name ASU Team leader name Yunan Li Team leader address, phone number and email address: Xidian
Large-scale gesture recognition based on Multimodal data with C3D and TSN July 6, 2017 1 Team details Team name ASU Team leader name Yunan Li Team leader address, phone number and email address: Xidian
Deep Learning For Video Classification. Presented by Natalie Carlebach & Gil Sharon
 Deep Learning For Video Classification Presented by Natalie Carlebach & Gil Sharon Overview Of Presentation Motivation Challenges of video classification Common datasets 4 different methods presented in
Deep Learning For Video Classification Presented by Natalie Carlebach & Gil Sharon Overview Of Presentation Motivation Challenges of video classification Common datasets 4 different methods presented in
Object Detection Based on Deep Learning
 Object Detection Based on Deep Learning Yurii Pashchenko AI Ukraine 2016, Kharkiv, 2016 Image classification (mostly what you ve seen) http://tutorial.caffe.berkeleyvision.org/caffe-cvpr15-detection.pdf
Object Detection Based on Deep Learning Yurii Pashchenko AI Ukraine 2016, Kharkiv, 2016 Image classification (mostly what you ve seen) http://tutorial.caffe.berkeleyvision.org/caffe-cvpr15-detection.pdf
Deep learning for object detection. Slides from Svetlana Lazebnik and many others
 Deep learning for object detection Slides from Svetlana Lazebnik and many others Recent developments in object detection 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before deep
Deep learning for object detection Slides from Svetlana Lazebnik and many others Recent developments in object detection 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before deep
Evaluation of Triple-Stream Convolutional Networks for Action Recognition
 Evaluation of Triple-Stream Convolutional Networks for Action Recognition Dichao Liu, Yu Wang and Jien Kato Graduate School of Informatics Nagoya University Nagoya, Japan Email: {liu, ywang, jien} (at)
Evaluation of Triple-Stream Convolutional Networks for Action Recognition Dichao Liu, Yu Wang and Jien Kato Graduate School of Informatics Nagoya University Nagoya, Japan Email: {liu, ywang, jien} (at)
Elastic Neural Networks for Classification
 Elastic Neural Networks for Classification Yi Zhou 1, Yue Bai 1, Shuvra S. Bhattacharyya 1, 2 and Heikki Huttunen 1 1 Tampere University of Technology, Finland, 2 University of Maryland, USA arxiv:1810.00589v3
Elastic Neural Networks for Classification Yi Zhou 1, Yue Bai 1, Shuvra S. Bhattacharyya 1, 2 and Heikki Huttunen 1 1 Tampere University of Technology, Finland, 2 University of Maryland, USA arxiv:1810.00589v3
Learning Latent Sub-events in Activity Videos Using Temporal Attention Filters
 Learning Latent Sub-events in Activity Videos Using Temporal Attention Filters AJ Piergiovanni, Chenyou Fan, and Michael S Ryoo School of Informatics and Computing, Indiana University, Bloomington, IN
Learning Latent Sub-events in Activity Videos Using Temporal Attention Filters AJ Piergiovanni, Chenyou Fan, and Michael S Ryoo School of Informatics and Computing, Indiana University, Bloomington, IN
T-C3D: Temporal Convolutional 3D Network for Real-Time Action Recognition
 The Thirty-Second AAAI Conference on Artificial Intelligence (AAAI-18) T-C3D: Temporal Convolutional 3D Network for Real-Time Action Recognition Kun Liu, 1 Wu Liu, 1 Chuang Gan, 2 Mingkui Tan, 3 Huadong
The Thirty-Second AAAI Conference on Artificial Intelligence (AAAI-18) T-C3D: Temporal Convolutional 3D Network for Real-Time Action Recognition Kun Liu, 1 Wu Liu, 1 Chuang Gan, 2 Mingkui Tan, 3 Huadong
LARGE-SCALE PERSON RE-IDENTIFICATION AS RETRIEVAL
 LARGE-SCALE PERSON RE-IDENTIFICATION AS RETRIEVAL Hantao Yao 1,2, Shiliang Zhang 3, Dongming Zhang 1, Yongdong Zhang 1,2, Jintao Li 1, Yu Wang 4, Qi Tian 5 1 Key Lab of Intelligent Information Processing
LARGE-SCALE PERSON RE-IDENTIFICATION AS RETRIEVAL Hantao Yao 1,2, Shiliang Zhang 3, Dongming Zhang 1, Yongdong Zhang 1,2, Jintao Li 1, Yu Wang 4, Qi Tian 5 1 Key Lab of Intelligent Information Processing
Video Gesture Recognition with RGB-D-S Data Based on 3D Convolutional Networks
 Video Gesture Recognition with RGB-D-S Data Based on 3D Convolutional Networks August 16, 2016 1 Team details Team name FLiXT Team leader name Yunan Li Team leader address, phone number and email address:
Video Gesture Recognition with RGB-D-S Data Based on 3D Convolutional Networks August 16, 2016 1 Team details Team name FLiXT Team leader name Yunan Li Team leader address, phone number and email address:
COMP 551 Applied Machine Learning Lecture 16: Deep Learning
 COMP 551 Applied Machine Learning Lecture 16: Deep Learning Instructor: Ryan Lowe (ryan.lowe@cs.mcgill.ca) Slides mostly by: Class web page: www.cs.mcgill.ca/~hvanho2/comp551 Unless otherwise noted, all
COMP 551 Applied Machine Learning Lecture 16: Deep Learning Instructor: Ryan Lowe (ryan.lowe@cs.mcgill.ca) Slides mostly by: Class web page: www.cs.mcgill.ca/~hvanho2/comp551 Unless otherwise noted, all
Content-Based Image Recovery
 Content-Based Image Recovery Hong-Yu Zhou and Jianxin Wu National Key Laboratory for Novel Software Technology Nanjing University, China zhouhy@lamda.nju.edu.cn wujx2001@nju.edu.cn Abstract. We propose
Content-Based Image Recovery Hong-Yu Zhou and Jianxin Wu National Key Laboratory for Novel Software Technology Nanjing University, China zhouhy@lamda.nju.edu.cn wujx2001@nju.edu.cn Abstract. We propose
Deep Learning for Computer Vision II
 IIIT Hyderabad Deep Learning for Computer Vision II C. V. Jawahar Paradigm Shift Feature Extraction (SIFT, HoG, ) Part Models / Encoding Classifier Sparrow Feature Learning Classifier Sparrow L 1 L 2 L
IIIT Hyderabad Deep Learning for Computer Vision II C. V. Jawahar Paradigm Shift Feature Extraction (SIFT, HoG, ) Part Models / Encoding Classifier Sparrow Feature Learning Classifier Sparrow L 1 L 2 L
Temporal Activity Detection in Untrimmed Videos with Recurrent Neural Networks
 Temporal Activity Detection in Untrimmed Videos with Recurrent Neural Networks Alberto Montes al.montes.gomez@gmail.com Santiago Pascual TALP Research Center santiago.pascual@tsc.upc.edu Amaia Salvador
Temporal Activity Detection in Untrimmed Videos with Recurrent Neural Networks Alberto Montes al.montes.gomez@gmail.com Santiago Pascual TALP Research Center santiago.pascual@tsc.upc.edu Amaia Salvador
Computer Vision Lecture 16
 Announcements Computer Vision Lecture 16 Deep Learning Applications 11.01.2017 Seminar registration period starts on Friday We will offer a lab course in the summer semester Deep Robot Learning Topic:
Announcements Computer Vision Lecture 16 Deep Learning Applications 11.01.2017 Seminar registration period starts on Friday We will offer a lab course in the summer semester Deep Robot Learning Topic:
Computer Vision Lecture 16
 Computer Vision Lecture 16 Deep Learning Applications 11.01.2017 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar registration period starts
Computer Vision Lecture 16 Deep Learning Applications 11.01.2017 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar registration period starts
Instance Retrieval at Fine-grained Level Using Multi-Attribute Recognition
 Instance Retrieval at Fine-grained Level Using Multi-Attribute Recognition Roshanak Zakizadeh, Yu Qian, Michele Sasdelli and Eduard Vazquez Cortexica Vision Systems Limited, London, UK Australian Institute
Instance Retrieval at Fine-grained Level Using Multi-Attribute Recognition Roshanak Zakizadeh, Yu Qian, Michele Sasdelli and Eduard Vazquez Cortexica Vision Systems Limited, London, UK Australian Institute
arxiv: v3 [cs.cv] 8 May 2015
![arxiv: v3 [cs.cv] 8 May 2015](/thumbs/81/84567177.jpg "arxiv: v3 [cs.cv] 8 May 2015") Exploiting Image-trained CNN Architectures for Unconstrained Video Classification arxiv:503.0444v3 [cs.cv] 8 May 205 Shengxin Zha Northwestern University Evanston IL USA szha@u.northwestern.edu Abstract
Exploiting Image-trained CNN Architectures for Unconstrained Video Classification arxiv:503.0444v3 [cs.cv] 8 May 205 Shengxin Zha Northwestern University Evanston IL USA szha@u.northwestern.edu Abstract
Localizing by Describing: Attribute-Guided Attention Localization for Fine-Grained Recognition
 Proceedings of the Thirty-First AAAI Conference on Artificial Intelligence (AAAI-17) Localizing by Describing: Attribute-Guided Attention Localization for Fine-Grained Recognition Xiao Liu, Jiang Wang,
Proceedings of the Thirty-First AAAI Conference on Artificial Intelligence (AAAI-17) Localizing by Describing: Attribute-Guided Attention Localization for Fine-Grained Recognition Xiao Liu, Jiang Wang,
Deconvolutions in Convolutional Neural Networks
 Overview Deconvolutions in Convolutional Neural Networks Bohyung Han bhhan@postech.ac.kr Computer Vision Lab. Convolutional Neural Networks (CNNs) Deconvolutions in CNNs Applications Network visualization
Overview Deconvolutions in Convolutional Neural Networks Bohyung Han bhhan@postech.ac.kr Computer Vision Lab. Convolutional Neural Networks (CNNs) Deconvolutions in CNNs Applications Network visualization
Computer Vision Lecture 16
 Computer Vision Lecture 16 Deep Learning for Object Categorization 14.01.2016 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar registration period
Computer Vision Lecture 16 Deep Learning for Object Categorization 14.01.2016 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar registration period
MiCT: Mixed 3D/2D Convolutional Tube for Human Action Recognition
 MiCT: Mixed 3D/2D Convolutional Tube for Human Action Recognition Yizhou Zhou 1 Xiaoyan Sun 2 Zheng-Jun Zha 1 Wenjun Zeng 2 1 University of Science and Technology of China 2 Microsoft Research Asia zyz0205@mail.ustc.edu.cn,
MiCT: Mixed 3D/2D Convolutional Tube for Human Action Recognition Yizhou Zhou 1 Xiaoyan Sun 2 Zheng-Jun Zha 1 Wenjun Zeng 2 1 University of Science and Technology of China 2 Microsoft Research Asia zyz0205@mail.ustc.edu.cn,
Deep learning for dense per-pixel prediction. Chunhua Shen The University of Adelaide, Australia
 Deep learning for dense per-pixel prediction Chunhua Shen The University of Adelaide, Australia Image understanding Classification error Convolution Neural Networks 0.3 0.2 0.1 Image Classification [Krizhevsky
Deep learning for dense per-pixel prediction Chunhua Shen The University of Adelaide, Australia Image understanding Classification error Convolution Neural Networks 0.3 0.2 0.1 Image Classification [Krizhevsky
Alternatives to Direct Supervision
 CreativeAI: Deep Learning for Graphics Alternatives to Direct Supervision Niloy Mitra Iasonas Kokkinos Paul Guerrero Nils Thuerey Tobias Ritschel UCL UCL UCL TUM UCL Timetable Theory and Basics State of
CreativeAI: Deep Learning for Graphics Alternatives to Direct Supervision Niloy Mitra Iasonas Kokkinos Paul Guerrero Nils Thuerey Tobias Ritschel UCL UCL UCL TUM UCL Timetable Theory and Basics State of
Tiny ImageNet Visual Recognition Challenge
 Tiny ImageNet Visual Recognition Challenge Ya Le Department of Statistics Stanford University yle@stanford.edu Xuan Yang Department of Electrical Engineering Stanford University xuany@stanford.edu Abstract
Tiny ImageNet Visual Recognition Challenge Ya Le Department of Statistics Stanford University yle@stanford.edu Xuan Yang Department of Electrical Engineering Stanford University xuany@stanford.edu Abstract
Two-Stream Convolutional Networks for Action Recognition in Videos
 Two-Stream Convolutional Networks for Action Recognition in Videos Karen Simonyan Andrew Zisserman Cemil Zalluhoğlu Introduction Aim Extend deep Convolution Networks to action recognition in video. Motivation
Two-Stream Convolutional Networks for Action Recognition in Videos Karen Simonyan Andrew Zisserman Cemil Zalluhoğlu Introduction Aim Extend deep Convolution Networks to action recognition in video. Motivation
Temporal Difference Networks for Video Action Recognition
 Temporal Difference Networks for Video Action Recognition Joe Yue-Hei Ng Larry S. Davis University of Maryland, College Park {yhng,lsd}@umiacs.umd.edu Abstract Deep convolutional neural networks have been
Temporal Difference Networks for Video Action Recognition Joe Yue-Hei Ng Larry S. Davis University of Maryland, College Park {yhng,lsd}@umiacs.umd.edu Abstract Deep convolutional neural networks have been
Image Captioning with Object Detection and Localization
 Image Captioning with Object Detection and Localization Zhongliang Yang, Yu-Jin Zhang, Sadaqat ur Rehman, Yongfeng Huang, Department of Electronic Engineering, Tsinghua University, Beijing 100084, China
Image Captioning with Object Detection and Localization Zhongliang Yang, Yu-Jin Zhang, Sadaqat ur Rehman, Yongfeng Huang, Department of Electronic Engineering, Tsinghua University, Beijing 100084, China
arxiv: v1 [cs.cv] 6 Jul 2016
![arxiv: v1 [cs.cv] 6 Jul 2016](/thumbs/80/81416563.jpg "arxiv: v1 [cs.cv] 6 Jul 2016") arxiv:607.079v [cs.cv] 6 Jul 206 Deep CORAL: Correlation Alignment for Deep Domain Adaptation Baochen Sun and Kate Saenko University of Massachusetts Lowell, Boston University Abstract. Deep neural networks
arxiv:607.079v [cs.cv] 6 Jul 206 Deep CORAL: Correlation Alignment for Deep Domain Adaptation Baochen Sun and Kate Saenko University of Massachusetts Lowell, Boston University Abstract. Deep neural networks
Deep Neural Networks:
 Deep Neural Networks: Part II Convolutional Neural Network (CNN) Yuan-Kai Wang, 2016 Web site of this course: http://pattern-recognition.weebly.com source: CNN for ImageClassification, by S. Lazebnik,
Deep Neural Networks: Part II Convolutional Neural Network (CNN) Yuan-Kai Wang, 2016 Web site of this course: http://pattern-recognition.weebly.com source: CNN for ImageClassification, by S. Lazebnik,
arxiv: v1 [cs.cv] 24 May 2016
![arxiv: v1 [cs.cv] 24 May 2016](/thumbs/80/80473828.jpg "arxiv: v1 [cs.cv] 24 May 2016") Dense CNN Learning with Equivalent Mappings arxiv:1605.07251v1 [cs.cv] 24 May 2016 Jianxin Wu Chen-Wei Xie Jian-Hao Luo National Key Laboratory for Novel Software Technology, Nanjing University 163 Xianlin
Dense CNN Learning with Equivalent Mappings arxiv:1605.07251v1 [cs.cv] 24 May 2016 Jianxin Wu Chen-Wei Xie Jian-Hao Luo National Key Laboratory for Novel Software Technology, Nanjing University 163 Xianlin
Real-time Object Detection CS 229 Course Project
 Real-time Object Detection CS 229 Course Project Zibo Gong 1, Tianchang He 1, and Ziyi Yang 1 1 Department of Electrical Engineering, Stanford University December 17, 2016 Abstract Objection detection
Real-time Object Detection CS 229 Course Project Zibo Gong 1, Tianchang He 1, and Ziyi Yang 1 1 Department of Electrical Engineering, Stanford University December 17, 2016 Abstract Objection detection
Deep Generative Models Variational Autoencoders
 Deep Generative Models Variational Autoencoders Sudeshna Sarkar 5 April 2017 Generative Nets Generative models that represent probability distributions over multiple variables in some way. Directed Generative
Deep Generative Models Variational Autoencoders Sudeshna Sarkar 5 April 2017 Generative Nets Generative models that represent probability distributions over multiple variables in some way. Directed Generative
Application of Convolutional Neural Network for Image Classification on Pascal VOC Challenge 2012 dataset
 Application of Convolutional Neural Network for Image Classification on Pascal VOC Challenge 2012 dataset Suyash Shetty Manipal Institute of Technology suyash.shashikant@learner.manipal.edu Abstract In
Application of Convolutional Neural Network for Image Classification on Pascal VOC Challenge 2012 dataset Suyash Shetty Manipal Institute of Technology suyash.shashikant@learner.manipal.edu Abstract In
Object detection with CNNs
 Object detection with CNNs 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before CNNs After CNNs 0% 2006 2007 2008 2009 2010 2011 2012 2013 2014 2015 2016 year Region proposals
Object detection with CNNs 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before CNNs After CNNs 0% 2006 2007 2008 2009 2010 2011 2012 2013 2014 2015 2016 year Region proposals
Towards Good Practices for Multi-modal Fusion in Large-scale Video Classification
 Towards Good Practices for Multi-modal Fusion in Large-scale Video Classification Jinlai Liu, Zehuan Yuan, and Changhu Wang Bytedance AI Lab {liujinlai.licio,yuanzehuan,wangchanghu}@bytedance.com Abstract.
Towards Good Practices for Multi-modal Fusion in Large-scale Video Classification Jinlai Liu, Zehuan Yuan, and Changhu Wang Bytedance AI Lab {liujinlai.licio,yuanzehuan,wangchanghu}@bytedance.com Abstract.
Spatiotemporal Pyramid Network for Video Action Recognition
 for Video Action Recognition Yunbo Wang, Mingsheng Long, Jianmin Wang, and Philip S. Yu KLiss, MOE; TNList; NEL-BDSS; School of Software, Tsinghua University, China University of Illinois at Chicago, IL,
for Video Action Recognition Yunbo Wang, Mingsheng Long, Jianmin Wang, and Philip S. Yu KLiss, MOE; TNList; NEL-BDSS; School of Software, Tsinghua University, China University of Illinois at Chicago, IL,
A Unified Method for First and Third Person Action Recognition
 A Unified Method for First and Third Person Action Recognition Ali Javidani Department of Computer Science and Engineering Shahid Beheshti University Tehran, Iran a.javidani@mail.sbu.ac.ir Ahmad Mahmoudi-Aznaveh
A Unified Method for First and Third Person Action Recognition Ali Javidani Department of Computer Science and Engineering Shahid Beheshti University Tehran, Iran a.javidani@mail.sbu.ac.ir Ahmad Mahmoudi-Aznaveh
Direct Multi-Scale Dual-Stream Network for Pedestrian Detection Sang-Il Jung and Ki-Sang Hong Image Information Processing Lab.
 [ICIP 2017] Direct Multi-Scale Dual-Stream Network for Pedestrian Detection Sang-Il Jung and Ki-Sang Hong Image Information Processing Lab., POSTECH Pedestrian Detection Goal To draw bounding boxes that
[ICIP 2017] Direct Multi-Scale Dual-Stream Network for Pedestrian Detection Sang-Il Jung and Ki-Sang Hong Image Information Processing Lab., POSTECH Pedestrian Detection Goal To draw bounding boxes that
arxiv: v1 [cs.cv] 22 Nov 2017
![arxiv: v1 [cs.cv] 22 Nov 2017](/thumbs/93/114301500.jpg "arxiv: v1 [cs.cv] 22 Nov 2017") D Nets: New Architecture and Transfer Learning for Video Classification Ali Diba,4,, Mohsen Fayyaz,, Vivek Sharma, Amir Hossein Karami 4, Mohammad Mahdi Arzani 4, Rahman Yousefzadeh 4, Luc Van Gool,4 ESAT-PSI,
D Nets: New Architecture and Transfer Learning for Video Classification Ali Diba,4,, Mohsen Fayyaz,, Vivek Sharma, Amir Hossein Karami 4, Mohammad Mahdi Arzani 4, Rahman Yousefzadeh 4, Luc Van Gool,4 ESAT-PSI,
HENet: A Highly Efficient Convolutional Neural. Networks Optimized for Accuracy, Speed and Storage
 HENet: A Highly Efficient Convolutional Neural Networks Optimized for Accuracy, Speed and Storage Qiuyu Zhu Shanghai University zhuqiuyu@staff.shu.edu.cn Ruixin Zhang Shanghai University chriszhang96@shu.edu.cn
HENet: A Highly Efficient Convolutional Neural Networks Optimized for Accuracy, Speed and Storage Qiuyu Zhu Shanghai University zhuqiuyu@staff.shu.edu.cn Ruixin Zhang Shanghai University chriszhang96@shu.edu.cn
Multimodal Keyless Attention Fusion for Video Classification
 The Thirty-Second AAAI Conference on Artificial Intelligence (AAAI-18) Multimodal Keyless Attention Fusion for Video Classification Xiang Long, 1 Chuang Gan, 1 Gerard de Melo, 2 Xiao Liu, 3 Yandong Li,
The Thirty-Second AAAI Conference on Artificial Intelligence (AAAI-18) Multimodal Keyless Attention Fusion for Video Classification Xiang Long, 1 Chuang Gan, 1 Gerard de Melo, 2 Xiao Liu, 3 Yandong Li,
Learning to Match. Jun Xu, Zhengdong Lu, Tianqi Chen, Hang Li
 Learning to Match Jun Xu, Zhengdong Lu, Tianqi Chen, Hang Li 1. Introduction The main tasks in many applications can be formalized as matching between heterogeneous objects, including search, recommendation,
Learning to Match Jun Xu, Zhengdong Lu, Tianqi Chen, Hang Li 1. Introduction The main tasks in many applications can be formalized as matching between heterogeneous objects, including search, recommendation,
Volumetric and Multi-View CNNs for Object Classification on 3D Data Supplementary Material
 Volumetric and Multi-View CNNs for Object Classification on 3D Data Supplementary Material Charles R. Qi Hao Su Matthias Nießner Angela Dai Mengyuan Yan Leonidas J. Guibas Stanford University 1. Details
Volumetric and Multi-View CNNs for Object Classification on 3D Data Supplementary Material Charles R. Qi Hao Su Matthias Nießner Angela Dai Mengyuan Yan Leonidas J. Guibas Stanford University 1. Details
3D model classification using convolutional neural network
 3D model classification using convolutional neural network JunYoung Gwak Stanford jgwak@cs.stanford.edu Abstract Our goal is to classify 3D models directly using convolutional neural network. Most of existing
3D model classification using convolutional neural network JunYoung Gwak Stanford jgwak@cs.stanford.edu Abstract Our goal is to classify 3D models directly using convolutional neural network. Most of existing
CS231N Section. Video Understanding 6/1/2018
 CS231N Section Video Understanding 6/1/2018 Outline Background / Motivation / History Video Datasets Models Pre-deep learning CNN + RNN 3D convolution Two-stream What we ve seen in class so far... Image
CS231N Section Video Understanding 6/1/2018 Outline Background / Motivation / History Video Datasets Models Pre-deep learning CNN + RNN 3D convolution Two-stream What we ve seen in class so far... Image
Mixtures of Gaussians and Advanced Feature Encoding
 Mixtures of Gaussians and Advanced Feature Encoding Computer Vision Ali Borji UWM Many slides from James Hayes, Derek Hoiem, Florent Perronnin, and Hervé Why do good recognition systems go bad? E.g. Why
Mixtures of Gaussians and Advanced Feature Encoding Computer Vision Ali Borji UWM Many slides from James Hayes, Derek Hoiem, Florent Perronnin, and Hervé Why do good recognition systems go bad? E.g. Why
Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks
 Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks Shaoqing Ren, Kaiming He, Ross Girshick, and Jian Sun Presented by Tushar Bansal Objective 1. Get bounding box for all objects
Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks Shaoqing Ren, Kaiming He, Ross Girshick, and Jian Sun Presented by Tushar Bansal Objective 1. Get bounding box for all objects
A Torch Library for Action Recognition and Detection Using CNNs and LSTMs
 A Torch Library for Action Recognition and Detection Using CNNs and LSTMs Gary Thung and Helen Jiang Stanford University {gthung, helennn}@stanford.edu Abstract It is very common now to see deep neural
A Torch Library for Action Recognition and Detection Using CNNs and LSTMs Gary Thung and Helen Jiang Stanford University {gthung, helennn}@stanford.edu Abstract It is very common now to see deep neural
Unsupervised Learning
 Deep Learning for Graphics Unsupervised Learning Niloy Mitra Iasonas Kokkinos Paul Guerrero Vladimir Kim Kostas Rematas Tobias Ritschel UCL UCL/Facebook UCL Adobe Research U Washington UCL Timetable Niloy
Deep Learning for Graphics Unsupervised Learning Niloy Mitra Iasonas Kokkinos Paul Guerrero Vladimir Kim Kostas Rematas Tobias Ritschel UCL UCL/Facebook UCL Adobe Research U Washington UCL Timetable Niloy
Visual Inspection of Storm-Water Pipe Systems using Deep Convolutional Neural Networks
 Visual Inspection of Storm-Water Pipe Systems using Deep Convolutional Neural Networks Ruwan Tennakoon, Reza Hoseinnezhad, Huu Tran and Alireza Bab-Hadiashar School of Engineering, RMIT University, Melbourne,
Visual Inspection of Storm-Water Pipe Systems using Deep Convolutional Neural Networks Ruwan Tennakoon, Reza Hoseinnezhad, Huu Tran and Alireza Bab-Hadiashar School of Engineering, RMIT University, Melbourne,
Activity Recognition in Temporally Untrimmed Videos
 Activity Recognition in Temporally Untrimmed Videos Bryan Anenberg Stanford University anenberg@stanford.edu Norman Yu Stanford University normanyu@stanford.edu Abstract We investigate strategies to apply
Activity Recognition in Temporally Untrimmed Videos Bryan Anenberg Stanford University anenberg@stanford.edu Norman Yu Stanford University normanyu@stanford.edu Abstract We investigate strategies to apply
GPU Accelerated Sequence Learning for Action Recognition. Yemin Shi
 GPU Accelerated Sequence Learning for Action Recognition Yemin Shi shiyemin@pku.edu.cn 2018-03 1 Background Object Recognition (Image Classification) Action Recognition (Video Classification) Action Recognition
GPU Accelerated Sequence Learning for Action Recognition Yemin Shi shiyemin@pku.edu.cn 2018-03 1 Background Object Recognition (Image Classification) Action Recognition (Video Classification) Action Recognition
Spatial Localization and Detection. Lecture 8-1
 Lecture 8: Spatial Localization and Detection Lecture 8-1 Administrative - Project Proposals were due on Saturday Homework 2 due Friday 2/5 Homework 1 grades out this week Midterm will be in-class on Wednesday
Lecture 8: Spatial Localization and Detection Lecture 8-1 Administrative - Project Proposals were due on Saturday Homework 2 due Friday 2/5 Homework 1 grades out this week Midterm will be in-class on Wednesday
Feature-Fused SSD: Fast Detection for Small Objects
 Feature-Fused SSD: Fast Detection for Small Objects Guimei Cao, Xuemei Xie, Wenzhe Yang, Quan Liao, Guangming Shi, Jinjian Wu School of Electronic Engineering, Xidian University, China xmxie@mail.xidian.edu.cn
Feature-Fused SSD: Fast Detection for Small Objects Guimei Cao, Xuemei Xie, Wenzhe Yang, Quan Liao, Guangming Shi, Jinjian Wu School of Electronic Engineering, Xidian University, China xmxie@mail.xidian.edu.cn
Facial Key Points Detection using Deep Convolutional Neural Network - NaimishNet
 1 Facial Key Points Detection using Deep Convolutional Neural Network - NaimishNet Naimish Agarwal, IIIT-Allahabad (irm2013013@iiita.ac.in) Artus Krohn-Grimberghe, University of Paderborn (artus@aisbi.de)
1 Facial Key Points Detection using Deep Convolutional Neural Network - NaimishNet Naimish Agarwal, IIIT-Allahabad (irm2013013@iiita.ac.in) Artus Krohn-Grimberghe, University of Paderborn (artus@aisbi.de)
arxiv: v1 [cs.cv] 23 Jan 2018
![arxiv: v1 [cs.cv] 23 Jan 2018](/thumbs/75/72740712.jpg "arxiv: v1 [cs.cv] 23 Jan 2018") Let s Dance: Learning From Online Dance Videos Daniel Castro Georgia Institute of Technology Steven Hickson Patsorn Sangkloy shickson@gatech.edu patsorn sangkloy@gatech.edu arxiv:1801.07388v1 [cs.cv] 23
Let s Dance: Learning From Online Dance Videos Daniel Castro Georgia Institute of Technology Steven Hickson Patsorn Sangkloy shickson@gatech.edu patsorn sangkloy@gatech.edu arxiv:1801.07388v1 [cs.cv] 23
Convolutional Neural Networks + Neural Style Transfer. Justin Johnson 2/1/2017
 Convolutional Neural Networks + Neural Style Transfer Justin Johnson 2/1/2017 Outline Convolutional Neural Networks Convolution Pooling Feature Visualization Neural Style Transfer Feature Inversion Texture
Convolutional Neural Networks + Neural Style Transfer Justin Johnson 2/1/2017 Outline Convolutional Neural Networks Convolution Pooling Feature Visualization Neural Style Transfer Feature Inversion Texture
Cultural Event Recognition by Subregion Classification with Convolutional Neural Network
 Cultural Event Recognition by Subregion Classification with Convolutional Neural Network Sungheon Park and Nojun Kwak Graduate School of CST, Seoul National University Seoul, Korea {sungheonpark,nojunk}@snu.ac.kr
Cultural Event Recognition by Subregion Classification with Convolutional Neural Network Sungheon Park and Nojun Kwak Graduate School of CST, Seoul National University Seoul, Korea {sungheonpark,nojunk}@snu.ac.kr
arxiv: v1 [cs.cv] 4 Dec 2014
![arxiv: v1 [cs.cv] 4 Dec 2014](/thumbs/83/87999872.jpg "arxiv: v1 [cs.cv] 4 Dec 2014") Convolutional Neural Networks at Constrained Time Cost Kaiming He Jian Sun Microsoft Research {kahe,jiansun}@microsoft.com arxiv:1412.1710v1 [cs.cv] 4 Dec 2014 Abstract Though recent advanced convolutional
Convolutional Neural Networks at Constrained Time Cost Kaiming He Jian Sun Microsoft Research {kahe,jiansun}@microsoft.com arxiv:1412.1710v1 [cs.cv] 4 Dec 2014 Abstract Though recent advanced convolutional
arxiv: v2 [cs.cv] 30 Oct 2018
![arxiv: v2 [cs.cv] 30 Oct 2018](/thumbs/94/118508906.jpg "arxiv: v2 [cs.cv] 30 Oct 2018") Adversarial Noise Layer: Regularize Neural Network By Adding Noise Zhonghui You, Jinmian Ye, Kunming Li, Zenglin Xu, Ping Wang School of Electronics Engineering and Computer Science, Peking University
Adversarial Noise Layer: Regularize Neural Network By Adding Noise Zhonghui You, Jinmian Ye, Kunming Li, Zenglin Xu, Ping Wang School of Electronics Engineering and Computer Science, Peking University
Compact Bilinear Pooling
 Compact Bilinear Pooling Yang Gao 1, Oscar Beijbom 1, Ning Zhang 2, Trevor Darrell 1 1 EECS, UC Berkeley 2 Snapchat Inc. {yg, obeijbom, trevor}@eecs.berkeley.edu {ning.zhang}@snapchat.com Abstract Bilinear
Compact Bilinear Pooling Yang Gao 1, Oscar Beijbom 1, Ning Zhang 2, Trevor Darrell 1 1 EECS, UC Berkeley 2 Snapchat Inc. {yg, obeijbom, trevor}@eecs.berkeley.edu {ning.zhang}@snapchat.com Abstract Bilinear
Cascade Region Regression for Robust Object Detection
 Large Scale Visual Recognition Challenge 2015 (ILSVRC2015) Cascade Region Regression for Robust Object Detection Jiankang Deng, Shaoli Huang, Jing Yang, Hui Shuai, Zhengbo Yu, Zongguang Lu, Qiang Ma, Yali
Large Scale Visual Recognition Challenge 2015 (ILSVRC2015) Cascade Region Regression for Robust Object Detection Jiankang Deng, Shaoli Huang, Jing Yang, Hui Shuai, Zhengbo Yu, Zongguang Lu, Qiang Ma, Yali
Using Machine Learning for Classification of Cancer Cells
 Using Machine Learning for Classification of Cancer Cells Camille Biscarrat University of California, Berkeley I Introduction Cell screening is a commonly used technique in the development of new drugs.
Using Machine Learning for Classification of Cancer Cells Camille Biscarrat University of California, Berkeley I Introduction Cell screening is a commonly used technique in the development of new drugs.
FCHD: A fast and accurate head detector
 JOURNAL OF L A TEX CLASS FILES, VOL. 14, NO. 8, AUGUST 2015 1 FCHD: A fast and accurate head detector Aditya Vora, Johnson Controls Inc. arxiv:1809.08766v2 [cs.cv] 26 Sep 2018 Abstract In this paper, we
JOURNAL OF L A TEX CLASS FILES, VOL. 14, NO. 8, AUGUST 2015 1 FCHD: A fast and accurate head detector Aditya Vora, Johnson Controls Inc. arxiv:1809.08766v2 [cs.cv] 26 Sep 2018 Abstract In this paper, we
Large-scale Video Classification with Convolutional Neural Networks
 Large-scale Video Classification with Convolutional Neural Networks Andrej Karpathy, George Toderici, Sanketh Shetty, Thomas Leung, Rahul Sukthankar, Li Fei-Fei Note: Slide content mostly from : Bay Area
Large-scale Video Classification with Convolutional Neural Networks Andrej Karpathy, George Toderici, Sanketh Shetty, Thomas Leung, Rahul Sukthankar, Li Fei-Fei Note: Slide content mostly from : Bay Area
R-FCN++: Towards Accurate Region-Based Fully Convolutional Networks for Object Detection
 The Thirty-Second AAAI Conference on Artificial Intelligence (AAAI-18) R-FCN++: Towards Accurate Region-Based Fully Convolutional Networks for Object Detection Zeming Li, 1 Yilun Chen, 2 Gang Yu, 2 Yangdong
The Thirty-Second AAAI Conference on Artificial Intelligence (AAAI-18) R-FCN++: Towards Accurate Region-Based Fully Convolutional Networks for Object Detection Zeming Li, 1 Yilun Chen, 2 Gang Yu, 2 Yangdong
arxiv: v1 [cs.cv] 5 Oct 2015
![arxiv: v1 [cs.cv] 5 Oct 2015](/thumbs/71/66021937.jpg "arxiv: v1 [cs.cv] 5 Oct 2015") Efficient Object Detection for High Resolution Images Yongxi Lu 1 and Tara Javidi 1 arxiv:1510.01257v1 [cs.cv] 5 Oct 2015 Abstract Efficient generation of high-quality object proposals is an essential
Efficient Object Detection for High Resolution Images Yongxi Lu 1 and Tara Javidi 1 arxiv:1510.01257v1 [cs.cv] 5 Oct 2015 Abstract Efficient generation of high-quality object proposals is an essential