AUGMENTED REALITY. Antonino Furnari
|
|
|
- Jasper Bridges
- 6 years ago
- Views:
Transcription

1 IPLab - Image Processing Laboratory Dipartimento di Matematica e Informatica Università degli Studi di Catania AUGMENTED REALITY Antonino Furnari furnari@dmi.unict.it Computer Vision A.Y
2 AUGMENTED REALITY a live copy, view of a physical, real-world environment whose elements are augmented (or supplemented) by computer-generated sensory input such as sound, video, graphics or GPS data it is related to a more general concept called mediated reality, in which a view of reality is modified (possibly even diminished rather than augmented) by a computer as a result, the technology functions by enhancing one s current perception of reality. wikipedia






3 APPLICATIONS
 estimate its 3D position in the real world; 3) render the 2D/3D content according to the estimated position and the inferred geometry of the scene; Two main")
4 VISION BASED AUGMENTED REALITY Computer Vision allows to create augmented reality applications by superimposing 2D or 3D contents on the scene; In order to do so we need to: 1) detect and track the area where to show the content; 2) estimate its 3D position in the real world; 3) render the 2D/3D content according to the estimated position and the inferred geometry of the scene; Two main technologies: fiduciary markers; markerless (i.e., object detection).
5 SOME HISTORY The term augmented reality appears since the 1940s; The first augmented head mounted display is invented by Ivan Sutherland in 1968; First systems using mobile devices, internet and geolocalization appear in the 90s; Advances in the 2000s; Augmented Reality diffusion in the 2010s.
6 HARDWARE Some technologies which make AR interesting: Handheld: Mobile phones; Tablets; Wearable devices: Google glass; Microsoft Holo Lens; Orcam (video - Epson Moverio.
; It offers functions for detecting and tracking single or multiple markers while relaying on OpenGL/glut for 2D/3D rendering; http://www.hitl.")
7 FIDUCIARY MARKERS AUGMENTED REALITY: ARTOOLKIT ARToolkit is an Open Source toolkit for marker-based augmented reality; It is quite old (last update in 2007) but still a good starting point for understanding the AR concepts (open & well documented); It offers functions for detecting and tracking single or multiple markers while relaying on OpenGL/glut for 2D/3D rendering;

8 ARTOOLKIT DEMO
9 ARTOOLKIT For additional informations about the next topics, the reader is referred to the very well written ARToolkit documentation and tutorials: Some other useful information can be found in the examples provided with the toolkit;
10 BASIC PRINCIPLES
11 FIDUCIARY MARKERS The marker plays the role of an object which geometry is known; In particular: we chose markers which are easily detectable (thick black borders); we know the real world size of the marker; we chose the inner symbol which is neither horizontally nor vertically symmetric in order to estimate its rotation.



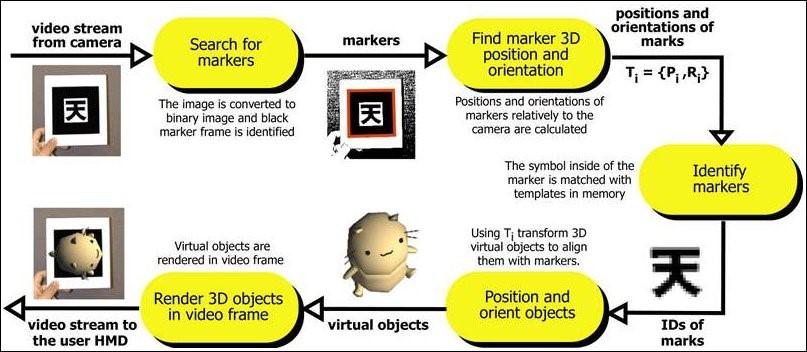
12 MARKER DETECTION original image thresholded image connected components contours edges and corners fitted square

13 MARKER DETECTION A simple detection algorithm is used to find just candidates: any pattern with thick black borders; The actual marker is found normalizing the candidates and comparing them with the searched pattern using template matching; The candidate giving the highest confidence is selected.


14 MARKER MATCHING found candidates... normalized candidates searched pattern......
15 ESTIMATION OF THE 3D POSITION AND ORIENTATION Now that we have an object which geometry, size, position and orientation are known, we can estimate its 3D position with respect to the camera; It can be done computing the extrinsic parameters as seen for camera calibration; Intrinsic parameters which are good for most cameras are part of the toolkit. Specific parameters can be obtained calibrating the camera.
16 ARTOOLKIT COORDINATE SYSTEMS

17 EXVIEW DEMO




18 ARTOOLKIT CAMERA CALIBRATION Intrinsic parameters which are enough general to work with most of the cameras are available in the toolkit; However, in order to improve the detection and tracking performances, a utility for camera calibration is provided in order to calibrate your own camera.
 and to estimate its position and orientation.")
19 MARKERLESS AUGMENTED REALITY? Tracking a number of feature points (e.g., SIFT) in order to detect a marker object (e.g., a photo) and to estimate its position and orientation.



20 AUGMENTED REALITY TOOLKITS

21 DEMO TIME

22 QUESTION TIME
23 CONTACTS For any doubts feel free to contact me: Room 30; Slides availabe at: My personal page: Studium course page
Image Formation. Antonino Furnari. Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania
 Image Formation Antonino Furnari Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania furnari@dmi.unict.it 18/03/2014 Outline Introduction; Geometric Primitives
Image Formation Antonino Furnari Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania furnari@dmi.unict.it 18/03/2014 Outline Introduction; Geometric Primitives
A Tutorial on VLFeat
 A Tutorial on VLFeat Antonino Furnari Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania furnari@dmi.unict.it 17/04/2014 MATLAB & Computer Vision 2 MATLAB offers
A Tutorial on VLFeat Antonino Furnari Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania furnari@dmi.unict.it 17/04/2014 MATLAB & Computer Vision 2 MATLAB offers
Outline. Introduction System Overview Camera Calibration Marker Tracking Pose Estimation of Markers Conclusion. Media IC & System Lab Po-Chen Wu 2
 Outline Introduction System Overview Camera Calibration Marker Tracking Pose Estimation of Markers Conclusion Media IC & System Lab Po-Chen Wu 2 Outline Introduction System Overview Camera Calibration
Outline Introduction System Overview Camera Calibration Marker Tracking Pose Estimation of Markers Conclusion Media IC & System Lab Po-Chen Wu 2 Outline Introduction System Overview Camera Calibration
Project report Augmented reality with ARToolKit
 Project report Augmented reality with ARToolKit FMA175 Image Analysis, Project Mathematical Sciences, Lund Institute of Technology Supervisor: Petter Strandmark Fredrik Larsson (dt07fl2@student.lth.se)
Project report Augmented reality with ARToolKit FMA175 Image Analysis, Project Mathematical Sciences, Lund Institute of Technology Supervisor: Petter Strandmark Fredrik Larsson (dt07fl2@student.lth.se)
Overview. Augmented reality and applications Marker-based augmented reality. Camera model. Binary markers Textured planar markers
 Augmented reality Overview Augmented reality and applications Marker-based augmented reality Binary markers Textured planar markers Camera model Homography Direct Linear Transformation What is augmented
Augmented reality Overview Augmented reality and applications Marker-based augmented reality Binary markers Textured planar markers Camera model Homography Direct Linear Transformation What is augmented
Millennium 3 Engineering
 Millennium 3 Engineering Millennium 3 Engineering Augmented Reality Product Offerings ISMAR 06 Industrial AR Workshop www.mill3eng.com www.artag.net Contact: Mark Fiala mark.fiala@nrc-cnrc.gc.ca mark.fiala@gmail.com
Millennium 3 Engineering Millennium 3 Engineering Augmented Reality Product Offerings ISMAR 06 Industrial AR Workshop www.mill3eng.com www.artag.net Contact: Mark Fiala mark.fiala@nrc-cnrc.gc.ca mark.fiala@gmail.com
Augmented reality with the ARToolKit FMA175 version 1.3 Supervisor Petter Strandmark By Olle Landin
 Augmented reality with the ARToolKit FMA75 version.3 Supervisor Petter Strandmark By Olle Landin Ic7ol3@student.lth.se Introduction Agumented Reality (AR) is the overlay of virtual computer graphics images
Augmented reality with the ARToolKit FMA75 version.3 Supervisor Petter Strandmark By Olle Landin Ic7ol3@student.lth.se Introduction Agumented Reality (AR) is the overlay of virtual computer graphics images
Visual Tracking. Antonino Furnari. Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania
 Visual Tracking Antonino Furnari Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania furnari@dmi.unict.it 11 giugno 2015 What is visual tracking? estimation
Visual Tracking Antonino Furnari Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania furnari@dmi.unict.it 11 giugno 2015 What is visual tracking? estimation
Video Analysis for Augmented and Mixed Reality. Kiyoshi Kiyokawa Osaka University
 Video Analysis for Augmented and Mixed Reality Kiyoshi Kiyokawa Osaka University Introduction Who am I? A researcher on AR / MR / VR / 3DUI / CSCW / Wearable Comp. Visualization / Wearable computing /
Video Analysis for Augmented and Mixed Reality Kiyoshi Kiyokawa Osaka University Introduction Who am I? A researcher on AR / MR / VR / 3DUI / CSCW / Wearable Comp. Visualization / Wearable computing /
Augmenting Reality, Naturally:
 Augmenting Reality, Naturally: Scene Modelling, Recognition and Tracking with Invariant Image Features by Iryna Gordon in collaboration with David G. Lowe Laboratory for Computational Intelligence Department
Augmenting Reality, Naturally: Scene Modelling, Recognition and Tracking with Invariant Image Features by Iryna Gordon in collaboration with David G. Lowe Laboratory for Computational Intelligence Department
Towards a Proximal Resource-based Architecture to Support Augmented Reality Applications. Cynthia Taylor, Joe Pasquale UC San Diego
 Towards a Proximal Resource-based Architecture to Support Augmented Reality Applications Cynthia Taylor, Joe Pasquale UC San Diego 1 Background and Motivation Small Devices Big Applications Thin Clients
Towards a Proximal Resource-based Architecture to Support Augmented Reality Applications Cynthia Taylor, Joe Pasquale UC San Diego 1 Background and Motivation Small Devices Big Applications Thin Clients
Augmented Reality. Sung-eui Yoon
 Augmented Reality Sung-eui Yoon 1 Project Guidelines: Project Topics Any topics related to the course theme are okay You can find topics by browsing recent papers 2 Expectations Mid-term project presentation
Augmented Reality Sung-eui Yoon 1 Project Guidelines: Project Topics Any topics related to the course theme are okay You can find topics by browsing recent papers 2 Expectations Mid-term project presentation
AR-media TUTORIALS REAL-TIME SHADOWS. (November, 2011)
") AR-media TUTORIALS REAL-TIME SHADOWS (November, 2011) Copyright Copyright 2008/2012 Inglobe Technologies S.r.l. All rights reserved. No part of this publication may be reproduced, transmitted, transcribed,
AR-media TUTORIALS REAL-TIME SHADOWS (November, 2011) Copyright Copyright 2008/2012 Inglobe Technologies S.r.l. All rights reserved. No part of this publication may be reproduced, transmitted, transcribed,
Augmented Reality the UITS Advanced Visualization Lab
 Augmented Reality the UITS Advanced Visualization Lab (for the digital arts & humanities at Indiana University) Chauncey Frend Analyst Programmer, Advanced Visualization Lab Indiana University September
Augmented Reality the UITS Advanced Visualization Lab (for the digital arts & humanities at Indiana University) Chauncey Frend Analyst Programmer, Advanced Visualization Lab Indiana University September
Visual Tracking. Image Processing Laboratory Dipartimento di Matematica e Informatica Università degli studi di Catania.
 Image Processing Laboratory Dipartimento di Matematica e Informatica Università degli studi di Catania 1 What is visual tracking? estimation of the target location over time 2 applications Six main areas:
Image Processing Laboratory Dipartimento di Matematica e Informatica Università degli studi di Catania 1 What is visual tracking? estimation of the target location over time 2 applications Six main areas:
JRC 3D Reconstructor CAMERA CALIBRATION & ORIENTATION
 Gexcel JRC 3D Reconstructor CAMERA CALIBRATION & ORIENTATION In this tutorial you will learn how to Include in the project external digital pictures of the scene you are modeling Calculate the original
Gexcel JRC 3D Reconstructor CAMERA CALIBRATION & ORIENTATION In this tutorial you will learn how to Include in the project external digital pictures of the scene you are modeling Calculate the original
Miniature faking. In close-up photo, the depth of field is limited.
 Miniature faking In close-up photo, the depth of field is limited. http://en.wikipedia.org/wiki/file:jodhpur_tilt_shift.jpg Miniature faking Miniature faking http://en.wikipedia.org/wiki/file:oregon_state_beavers_tilt-shift_miniature_greg_keene.jpg
Miniature faking In close-up photo, the depth of field is limited. http://en.wikipedia.org/wiki/file:jodhpur_tilt_shift.jpg Miniature faking Miniature faking http://en.wikipedia.org/wiki/file:oregon_state_beavers_tilt-shift_miniature_greg_keene.jpg
Recent Trend for Visual Media Synthesis and Analysis
 1 AR Display for Observing Sports Events based on Camera Tracking Using Pattern of Ground Akihito Enomoto, Hideo Saito saito@hvrl.ics.keio.ac.jp www.hvrl.ics.keio.ac.jp HVRL: Hyper Vision i Research Lab.
1 AR Display for Observing Sports Events based on Camera Tracking Using Pattern of Ground Akihito Enomoto, Hideo Saito saito@hvrl.ics.keio.ac.jp www.hvrl.ics.keio.ac.jp HVRL: Hyper Vision i Research Lab.
Image processing and features
 Image processing and features Gabriele Bleser gabriele.bleser@dfki.de Thanks to Harald Wuest, Folker Wientapper and Marc Pollefeys Introduction Previous lectures: geometry Pose estimation Epipolar geometry
Image processing and features Gabriele Bleser gabriele.bleser@dfki.de Thanks to Harald Wuest, Folker Wientapper and Marc Pollefeys Introduction Previous lectures: geometry Pose estimation Epipolar geometry
Pin Hole Cameras & Warp Functions
 Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Example of SLAM for AR Taken from:
Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Example of SLAM for AR Taken from:
Sviluppo Di App Mobile Per Augmented Reality
 Sviluppo Di App Mobile Per Augmented Reality Manuela Chessa University of Genova Dept. of Informatics, Bioengineering, Robotics, and Systems Engineering (manuela.chessa@unige.it) A brief history TODAY
Sviluppo Di App Mobile Per Augmented Reality Manuela Chessa University of Genova Dept. of Informatics, Bioengineering, Robotics, and Systems Engineering (manuela.chessa@unige.it) A brief history TODAY
1 Projective Geometry
 CIS8, Machine Perception Review Problem - SPRING 26 Instructions. All coordinate systems are right handed. Projective Geometry Figure : Facade rectification. I took an image of a rectangular object, and
CIS8, Machine Perception Review Problem - SPRING 26 Instructions. All coordinate systems are right handed. Projective Geometry Figure : Facade rectification. I took an image of a rectangular object, and
Tracking Under Low-light Conditions Using Background Subtraction
 Tracking Under Low-light Conditions Using Background Subtraction Matthew Bennink Clemson University Clemson, South Carolina Abstract A low-light tracking system was developed using background subtraction.
Tracking Under Low-light Conditions Using Background Subtraction Matthew Bennink Clemson University Clemson, South Carolina Abstract A low-light tracking system was developed using background subtraction.
Il colore: acquisizione e visualizzazione. Lezione 20: 11 Maggio 2011
 Il colore: acquisizione e visualizzazione Lezione 20: 11 Maggio 2011 Outline The importance of color What is color? Material properties vs. unshaded color Texture building from photos Image registration
Il colore: acquisizione e visualizzazione Lezione 20: 11 Maggio 2011 Outline The importance of color What is color? Material properties vs. unshaded color Texture building from photos Image registration
High-Fidelity Augmented Reality Interactions Hrvoje Benko Researcher, MSR Redmond
 High-Fidelity Augmented Reality Interactions Hrvoje Benko Researcher, MSR Redmond New generation of interfaces Instead of interacting through indirect input devices (mice and keyboard), the user is interacting
High-Fidelity Augmented Reality Interactions Hrvoje Benko Researcher, MSR Redmond New generation of interfaces Instead of interacting through indirect input devices (mice and keyboard), the user is interacting
Computational Optical Imaging - Optique Numerique. -- Multiple View Geometry and Stereo --
 Computational Optical Imaging - Optique Numerique -- Multiple View Geometry and Stereo -- Winter 2013 Ivo Ihrke with slides by Thorsten Thormaehlen Feature Detection and Matching Wide-Baseline-Matching
Computational Optical Imaging - Optique Numerique -- Multiple View Geometry and Stereo -- Winter 2013 Ivo Ihrke with slides by Thorsten Thormaehlen Feature Detection and Matching Wide-Baseline-Matching
CS 378: Autonomous Intelligent Robotics. Instructor: Jivko Sinapov
 CS 378: Autonomous Intelligent Robotics Instructor: Jivko Sinapov http://www.cs.utexas.edu/~jsinapov/teaching/cs378/ Visual Registration and Recognition Announcements Homework 6 is out, due 4/5 4/7 Installing
CS 378: Autonomous Intelligent Robotics Instructor: Jivko Sinapov http://www.cs.utexas.edu/~jsinapov/teaching/cs378/ Visual Registration and Recognition Announcements Homework 6 is out, due 4/5 4/7 Installing
TEXT DETECTION AND MARKER BASED FINGER TRACKING IN BUILDING A LANGUAGE ASSISTANT FOR WEARABLE GLASSES
 International Conference on Internet Studies, April2-4, 2018, Katamatsu, Japan TEXT DETECTION AND MARKER BASED FINGER TRACKING IN BUILDING A LANGUAGE ASSISTANT FOR WEARABLE GLASSES Ting Kwok Chan, Ying
International Conference on Internet Studies, April2-4, 2018, Katamatsu, Japan TEXT DETECTION AND MARKER BASED FINGER TRACKING IN BUILDING A LANGUAGE ASSISTANT FOR WEARABLE GLASSES Ting Kwok Chan, Ying
Augmented Reality & Improved RANSAC
 Augmented Reality & Improved RANSAC CSE Department GCET, Greater Noida Abstract- This paper describes RANSAC algorithm and suggests its significant improvement suitable for utilization with nonlinear data
Augmented Reality & Improved RANSAC CSE Department GCET, Greater Noida Abstract- This paper describes RANSAC algorithm and suggests its significant improvement suitable for utilization with nonlinear data
Pattern Feature Detection for Camera Calibration Using Circular Sample
 Pattern Feature Detection for Camera Calibration Using Circular Sample Dong-Won Shin and Yo-Sung Ho (&) Gwangju Institute of Science and Technology (GIST), 13 Cheomdan-gwagiro, Buk-gu, Gwangju 500-71,
Pattern Feature Detection for Camera Calibration Using Circular Sample Dong-Won Shin and Yo-Sung Ho (&) Gwangju Institute of Science and Technology (GIST), 13 Cheomdan-gwagiro, Buk-gu, Gwangju 500-71,
the recording of an activity by a participant in the activity, typically by way of small wearable or portable personal technologies
 Sousveillance the recording of an activity by a participant in the activity, typically by way of small wearable or portable personal technologies coined by Steve Mann stems from the contrasting French
Sousveillance the recording of an activity by a participant in the activity, typically by way of small wearable or portable personal technologies coined by Steve Mann stems from the contrasting French
Depth from two cameras: stereopsis
 Depth from two cameras: stereopsis Epipolar Geometry Canonical Configuration Correspondence Matching School of Computer Science & Statistics Trinity College Dublin Dublin 2 Ireland www.scss.tcd.ie Lecture
Depth from two cameras: stereopsis Epipolar Geometry Canonical Configuration Correspondence Matching School of Computer Science & Statistics Trinity College Dublin Dublin 2 Ireland www.scss.tcd.ie Lecture
The Smart Glasses Revolution & The Rise of Augmented Reality in Manufacturing. Dan C. Cui VP Business Development Vuzix Corp.
 The Smart Glasses Revolution & The Rise of Augmented Reality in Manufacturing SAP Manufacturing Industry Forum 2014 Dan C. Cui VP Business Development Vuzix Corp. (OTC: QB: VUZI) The Revolution introduced
The Smart Glasses Revolution & The Rise of Augmented Reality in Manufacturing SAP Manufacturing Industry Forum 2014 Dan C. Cui VP Business Development Vuzix Corp. (OTC: QB: VUZI) The Revolution introduced
Archeoviz: Improving the Camera Calibration Process. Jonathan Goulet Advisor: Dr. Kostas Daniilidis
 Archeoviz: Improving the Camera Calibration Process Jonathan Goulet Advisor: Dr. Kostas Daniilidis Problem Project Description Complete 3-D reconstruction of site in Tiwanaku, Bolivia Program for archeologists
Archeoviz: Improving the Camera Calibration Process Jonathan Goulet Advisor: Dr. Kostas Daniilidis Problem Project Description Complete 3-D reconstruction of site in Tiwanaku, Bolivia Program for archeologists
Intrinsic and Extrinsic Camera Parameter Estimation with Zoomable Camera for Augmented Reality
 Intrinsic and Extrinsic Camera Parameter Estimation with Zoomable Camera for Augmented Reality Kazuya Okada, Takafumi Taketomi, Goshiro Yamamoto, Jun Miyazaki, Hirokazu Kato Nara Institute of Science and
Intrinsic and Extrinsic Camera Parameter Estimation with Zoomable Camera for Augmented Reality Kazuya Okada, Takafumi Taketomi, Goshiro Yamamoto, Jun Miyazaki, Hirokazu Kato Nara Institute of Science and
A NEW IMAGE CODE RECOGNIZABLE AT A DISTANCE
 A NEW IMAGE CODE RECOGNIZABLE AT A DISTANCE 1 HYEON YEONG CHOI, 2 WON-KEE HONG, 3 JAEPIL KO * 1,3 Department of Computer Engineering, KIT, Korea 2 School of Information and Comm. Engineering, Daegu Univ.,
A NEW IMAGE CODE RECOGNIZABLE AT A DISTANCE 1 HYEON YEONG CHOI, 2 WON-KEE HONG, 3 JAEPIL KO * 1,3 Department of Computer Engineering, KIT, Korea 2 School of Information and Comm. Engineering, Daegu Univ.,
Rectification and Disparity
 Rectification and Disparity Nassir Navab Slides prepared by Christian Unger What is Stereo Vision? Introduction A technique aimed at inferring dense depth measurements efficiently using two cameras. Wide
Rectification and Disparity Nassir Navab Slides prepared by Christian Unger What is Stereo Vision? Introduction A technique aimed at inferring dense depth measurements efficiently using two cameras. Wide
Improvement of Accuracy for 2D Marker-Based Tracking Using Particle Filter
 17th International Conference on Artificial Reality and Telexistence 2007 Improvement of Accuracy for 2D Marker-Based Tracking Using Particle Filter Yuko Uematsu Hideo Saito Keio University 3-14-1 Hiyoshi,
17th International Conference on Artificial Reality and Telexistence 2007 Improvement of Accuracy for 2D Marker-Based Tracking Using Particle Filter Yuko Uematsu Hideo Saito Keio University 3-14-1 Hiyoshi,
Fully Automatic Endoscope Calibration for Intraoperative Use
 Fully Automatic Endoscope Calibration for Intraoperative Use Christian Wengert, Mireille Reeff, Philippe C. Cattin, Gábor Székely Computer Vision Laboratory, ETH Zurich, 8092 Zurich, Switzerland {wengert,
Fully Automatic Endoscope Calibration for Intraoperative Use Christian Wengert, Mireille Reeff, Philippe C. Cattin, Gábor Székely Computer Vision Laboratory, ETH Zurich, 8092 Zurich, Switzerland {wengert,
Occlusion Detection of Real Objects using Contour Based Stereo Matching
 Occlusion Detection of Real Objects using Contour Based Stereo Matching Kenichi Hayashi, Hirokazu Kato, Shogo Nishida Graduate School of Engineering Science, Osaka University,1-3 Machikaneyama-cho, Toyonaka,
Occlusion Detection of Real Objects using Contour Based Stereo Matching Kenichi Hayashi, Hirokazu Kato, Shogo Nishida Graduate School of Engineering Science, Osaka University,1-3 Machikaneyama-cho, Toyonaka,
Camera Models and Image Formation. Srikumar Ramalingam School of Computing University of Utah
 Camera Models and Image Formation Srikumar Ramalingam School of Computing University of Utah srikumar@cs.utah.edu Reference Most slides are adapted from the following notes: Some lecture notes on geometric
Camera Models and Image Formation Srikumar Ramalingam School of Computing University of Utah srikumar@cs.utah.edu Reference Most slides are adapted from the following notes: Some lecture notes on geometric
Project 4 Results. Representation. Data. Learning. Zachary, Hung-I, Paul, Emanuel. SIFT and HoG are popular and successful.
 Project 4 Results Representation SIFT and HoG are popular and successful. Data Hugely varying results from hard mining. Learning Non-linear classifier usually better. Zachary, Hung-I, Paul, Emanuel Project
Project 4 Results Representation SIFT and HoG are popular and successful. Data Hugely varying results from hard mining. Learning Non-linear classifier usually better. Zachary, Hung-I, Paul, Emanuel Project
Camera Model and Calibration
 Camera Model and Calibration Lecture-10 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Camera Model and Calibration Lecture-10 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Tecnologie per la ricostruzione di modelli 3D da immagini. Marco Callieri ISTI-CNR, Pisa, Italy
 Tecnologie per la ricostruzione di modelli 3D da immagini Marco Callieri ISTI-CNR, Pisa, Italy 3D from Photos Our not-so-secret dream: obtain a reliable and precise 3D from simple photos Why? Easier, less
Tecnologie per la ricostruzione di modelli 3D da immagini Marco Callieri ISTI-CNR, Pisa, Italy 3D from Photos Our not-so-secret dream: obtain a reliable and precise 3D from simple photos Why? Easier, less
Image Based Rendering. D.A. Forsyth, with slides from John Hart
 Image Based Rendering D.A. Forsyth, with slides from John Hart Topics Mosaics translating cameras reveal extra information, break occlusion Optical flow for very small movements of the camera Explicit
Image Based Rendering D.A. Forsyth, with slides from John Hart Topics Mosaics translating cameras reveal extra information, break occlusion Optical flow for very small movements of the camera Explicit
Marco Cavallo Riverwalk: Incorporating Historical Photographs in Public Outdoor Augmented Reality Experiences
 Marco Cavallo Riverwalk: Incorporating Historical Photographs in Public Outdoor Augmented Reality Experiences First of all some discussions about terminology used could be done, but for now we will stick
Marco Cavallo Riverwalk: Incorporating Historical Photographs in Public Outdoor Augmented Reality Experiences First of all some discussions about terminology used could be done, but for now we will stick
Target Marker: A Visual Marker for Long Distances and Detection in Realtime on Mobile Devices
 Proceedings of the World Congress on Electrical Engineering and Computer Systems and Science (EECSS 015) Barcelona, Spain, July 13-14, 015 Paper No. 339 Target Marker: A Visual Marker for Long Distances
Proceedings of the World Congress on Electrical Engineering and Computer Systems and Science (EECSS 015) Barcelona, Spain, July 13-14, 015 Paper No. 339 Target Marker: A Visual Marker for Long Distances
Vision-Based Hand Detection for Registration of Virtual Objects in Augmented Reality
 International Journal of Future Computer and Communication, Vol. 2, No. 5, October 213 Vision-Based Hand Detection for Registration of Virtual Objects in Augmented Reality Kah Pin Ng, Guat Yew Tan, and
International Journal of Future Computer and Communication, Vol. 2, No. 5, October 213 Vision-Based Hand Detection for Registration of Virtual Objects in Augmented Reality Kah Pin Ng, Guat Yew Tan, and
Tecnologie per la ricostruzione di modelli 3D da immagini. Marco Callieri ISTI-CNR, Pisa, Italy
 Tecnologie per la ricostruzione di modelli 3D da immagini Marco Callieri ISTI-CNR, Pisa, Italy Who am I? Marco Callieri PhD in computer science Always had the like for 3D graphics... Researcher at the
Tecnologie per la ricostruzione di modelli 3D da immagini Marco Callieri ISTI-CNR, Pisa, Italy Who am I? Marco Callieri PhD in computer science Always had the like for 3D graphics... Researcher at the
CHAPTER 3 DISPARITY AND DEPTH MAP COMPUTATION
 CHAPTER 3 DISPARITY AND DEPTH MAP COMPUTATION In this chapter we will discuss the process of disparity computation. It plays an important role in our caricature system because all 3D coordinates of nodes
CHAPTER 3 DISPARITY AND DEPTH MAP COMPUTATION In this chapter we will discuss the process of disparity computation. It plays an important role in our caricature system because all 3D coordinates of nodes
AR-media Plugin v2.3. QUICK START GUIDE (September, 2013)
") QUICK START GUIDE (September, 2013) (Windows XP/Vista/7) Inglobe Technologies 2008/2013 Copyright Copyright 2008/2013 Inglobe Technologies S.r.l. All rights reserved. No part of this publication may be
QUICK START GUIDE (September, 2013) (Windows XP/Vista/7) Inglobe Technologies 2008/2013 Copyright Copyright 2008/2013 Inglobe Technologies S.r.l. All rights reserved. No part of this publication may be
AugLAC - Generic Framework for Augmented Location Aware Commerce
 AugLAC - Generic Framework for Augmented Location Aware Commerce E.M.P. Gunatunge, H.Y.M. Hewagama, S.G.S. Hewawalpita, I. Perera, Y.B.N. Udara Dept. of Computer Science & Engineering University of Moratuwa.
AugLAC - Generic Framework for Augmented Location Aware Commerce E.M.P. Gunatunge, H.Y.M. Hewagama, S.G.S. Hewawalpita, I. Perera, Y.B.N. Udara Dept. of Computer Science & Engineering University of Moratuwa.
CS664 Lecture #19: Layers, RANSAC, panoramas, epipolar geometry
 CS664 Lecture #19: Layers, RANSAC, panoramas, epipolar geometry Some material taken from: David Lowe, UBC Jiri Matas, CMP Prague http://cmp.felk.cvut.cz/~matas/papers/presentations/matas_beyondransac_cvprac05.ppt
CS664 Lecture #19: Layers, RANSAC, panoramas, epipolar geometry Some material taken from: David Lowe, UBC Jiri Matas, CMP Prague http://cmp.felk.cvut.cz/~matas/papers/presentations/matas_beyondransac_cvprac05.ppt
Real Time Image Processing Multimedia Skype Client
 1 Real Time Image Processing Multimedia Skype Client Reinhard Klapfer Dani Martinez Capilla I. INTRODUCTION Augmented Reality (AR) is one of the most researched areas in Computer Vision Science nowadays.
1 Real Time Image Processing Multimedia Skype Client Reinhard Klapfer Dani Martinez Capilla I. INTRODUCTION Augmented Reality (AR) is one of the most researched areas in Computer Vision Science nowadays.
Agenda: Overview 1. Trackman basics 2. Example 1, Input, Output and Viszualization 3. Example 2, Fusion
 Trackman Tutorial Agenda: Overview 1. Trackman basics 2. Example 1, Input, Output and Viszualization 1. Step 1: Camera Rendering 2. Step 2: Marker Tracking 3. Step 3: Object Rendering 4. Step 4: Camera
Trackman Tutorial Agenda: Overview 1. Trackman basics 2. Example 1, Input, Output and Viszualization 1. Step 1: Camera Rendering 2. Step 2: Marker Tracking 3. Step 3: Object Rendering 4. Step 4: Camera
Fast Natural Feature Tracking for Mobile Augmented Reality Applications
 Fast Natural Feature Tracking for Mobile Augmented Reality Applications Jong-Seung Park 1, Byeong-Jo Bae 2, and Ramesh Jain 3 1 Dept. of Computer Science & Eng., University of Incheon, Korea 2 Hyundai
Fast Natural Feature Tracking for Mobile Augmented Reality Applications Jong-Seung Park 1, Byeong-Jo Bae 2, and Ramesh Jain 3 1 Dept. of Computer Science & Eng., University of Incheon, Korea 2 Hyundai
3D from Images - Assisted Modeling, Photogrammetry. Marco Callieri ISTI-CNR, Pisa, Italy
 3D from Images - Assisted Modeling, Photogrammetry Marco Callieri ISTI-CNR, Pisa, Italy 3D from Photos Our not-so-secret dream: obtain a reliable and precise 3D from simple photos Why? Easier, cheaper
3D from Images - Assisted Modeling, Photogrammetry Marco Callieri ISTI-CNR, Pisa, Italy 3D from Photos Our not-so-secret dream: obtain a reliable and precise 3D from simple photos Why? Easier, cheaper
Photo Tourism: Exploring Photo Collections in 3D
 Click! Click! Oooo!! Click! Zoom click! Click! Some other camera noise!! Photo Tourism: Exploring Photo Collections in 3D Click! Click! Ahhh! Click! Click! Overview of Research at Microsoft, 2007 Jeremy
Click! Click! Oooo!! Click! Zoom click! Click! Some other camera noise!! Photo Tourism: Exploring Photo Collections in 3D Click! Click! Ahhh! Click! Click! Overview of Research at Microsoft, 2007 Jeremy
Il colore: acquisizione e visualizzazione. Lezione 17: 11 Maggio 2012
 Il colore: acquisizione e visualizzazione Lezione 17: 11 Maggio 2012 The importance of color information Precision vs. Perception 3D scanned geometry Photo Color and appearance Pure geometry Pure color
Il colore: acquisizione e visualizzazione Lezione 17: 11 Maggio 2012 The importance of color information Precision vs. Perception 3D scanned geometry Photo Color and appearance Pure geometry Pure color
Camera Registration in a 3D City Model. Min Ding CS294-6 Final Presentation Dec 13, 2006
 Camera Registration in a 3D City Model Min Ding CS294-6 Final Presentation Dec 13, 2006 Goal: Reconstruct 3D city model usable for virtual walk- and fly-throughs Virtual reality Urban planning Simulation
Camera Registration in a 3D City Model Min Ding CS294-6 Final Presentation Dec 13, 2006 Goal: Reconstruct 3D city model usable for virtual walk- and fly-throughs Virtual reality Urban planning Simulation
3D Visualization through Planar Pattern Based Augmented Reality
 NATIONAL TECHNICAL UNIVERSITY OF ATHENS SCHOOL OF RURAL AND SURVEYING ENGINEERS DEPARTMENT OF TOPOGRAPHY LABORATORY OF PHOTOGRAMMETRY 3D Visualization through Planar Pattern Based Augmented Reality Dr.
NATIONAL TECHNICAL UNIVERSITY OF ATHENS SCHOOL OF RURAL AND SURVEYING ENGINEERS DEPARTMENT OF TOPOGRAPHY LABORATORY OF PHOTOGRAMMETRY 3D Visualization through Planar Pattern Based Augmented Reality Dr.
1. Open PowerPoint and you will see the introductory screen that contains different themes and templates. From the selection displayed, choose Slice.
 PowerPoint Assessment ***Remember! This is a test and you cannot ask for help. This must be done completely on your own. If you have forgotten a skill, please go to my Tutorials page on my website and
PowerPoint Assessment ***Remember! This is a test and you cannot ask for help. This must be done completely on your own. If you have forgotten a skill, please go to my Tutorials page on my website and
Improved Navigated Spine Surgery Utilizing Augmented Reality Visualization
 Improved Navigated Spine Surgery Utilizing Augmented Reality Visualization Zein Salah 1,2, Bernhard Preim 1, Erck Elolf 3, Jörg Franke 4, Georg Rose 2 1Department of Simulation and Graphics, University
Improved Navigated Spine Surgery Utilizing Augmented Reality Visualization Zein Salah 1,2, Bernhard Preim 1, Erck Elolf 3, Jörg Franke 4, Georg Rose 2 1Department of Simulation and Graphics, University
Localization of Wearable Users Using Invisible Retro-reflective Markers and an IR Camera
 Localization of Wearable Users Using Invisible Retro-reflective Markers and an IR Camera Yusuke Nakazato, Masayuki Kanbara and Naokazu Yokoya Graduate School of Information Science, Nara Institute of Science
Localization of Wearable Users Using Invisible Retro-reflective Markers and an IR Camera Yusuke Nakazato, Masayuki Kanbara and Naokazu Yokoya Graduate School of Information Science, Nara Institute of Science
Wide area tracking method for augmented reality supporting nuclear power plant maintenance work
 Journal of Marine Science and Application, Vol.6, No.1, January 2006, PP***-*** Wide area tracking method for augmented reality supporting nuclear power plant maintenance work ISHII Hirotake 1, YAN Weida
Journal of Marine Science and Application, Vol.6, No.1, January 2006, PP***-*** Wide area tracking method for augmented reality supporting nuclear power plant maintenance work ISHII Hirotake 1, YAN Weida
arxiv: v1 [cs.cv] 1 Jan 2019
![arxiv: v1 [cs.cv] 1 Jan 2019](/thumbs/93/112194933.jpg "arxiv: v1 [cs.cv] 1 Jan 2019") Mapping Areas using Computer Vision Algorithms and Drones Bashar Alhafni Saulo Fernando Guedes Lays Cavalcante Ribeiro Juhyun Park Jeongkyu Lee University of Bridgeport. Bridgeport, CT, 06606. United States
Mapping Areas using Computer Vision Algorithms and Drones Bashar Alhafni Saulo Fernando Guedes Lays Cavalcante Ribeiro Juhyun Park Jeongkyu Lee University of Bridgeport. Bridgeport, CT, 06606. United States
LUMS Mine Detector Project
 LUMS Mine Detector Project Using visual information to control a robot (Hutchinson et al. 1996). Vision may or may not be used in the feedback loop. Visual (image based) features such as points, lines
LUMS Mine Detector Project Using visual information to control a robot (Hutchinson et al. 1996). Vision may or may not be used in the feedback loop. Visual (image based) features such as points, lines
Application questions. Theoretical questions
 The oral exam will last 30 minutes and will consist of one application question followed by two theoretical questions. Please find below a non exhaustive list of possible application questions. The list
The oral exam will last 30 minutes and will consist of one application question followed by two theoretical questions. Please find below a non exhaustive list of possible application questions. The list
Development of an Augmented Reality System for Plant Maintenance Support
 Development of an Augmented Reality System for Plant Maintenance Support Hirotake Ishii, Koji Matsui, Misa Kawauchi, Hiroshi Shimoda and Hidekazu Yoshikawa Graduate School of Energy Science, Kyoto University
Development of an Augmented Reality System for Plant Maintenance Support Hirotake Ishii, Koji Matsui, Misa Kawauchi, Hiroshi Shimoda and Hidekazu Yoshikawa Graduate School of Energy Science, Kyoto University
ISMAR 2010 Tracking Competition & Alvar. ScandAR 2010 Alain Boyer Augmented Reality Team VTT Technical Research Centre of Finland
 ISMAR 2010 Tracking Competition & Alvar ScandAR 2010 Alain Boyer Augmented Reality Team VTT Technical Research Centre of Finland 2 Agenda ISMAR 2010 Tracking Competition Alvar Overview Rules Approach Calibration
ISMAR 2010 Tracking Competition & Alvar ScandAR 2010 Alain Boyer Augmented Reality Team VTT Technical Research Centre of Finland 2 Agenda ISMAR 2010 Tracking Competition Alvar Overview Rules Approach Calibration
AR-media Plugin v2.3. for Nemetschek Scia Engineer. INSTALLATION & USER GUIDE (February, 2013)
") INSTALLATION & USER GUIDE (February, 2013) Inglobe Technologies 2008/2013 Copyright Copyright 2008/2013 Inglobe Technologies S.r.l. All rights reserved. No part of this publication may be reproduced, transmitted,
INSTALLATION & USER GUIDE (February, 2013) Inglobe Technologies 2008/2013 Copyright Copyright 2008/2013 Inglobe Technologies S.r.l. All rights reserved. No part of this publication may be reproduced, transmitted,
calibrated coordinates Linear transformation pixel coordinates
 1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
Note: Images shown here are for position only; additional designs available in specification sheets
 Designs elements can be selected that have a State name built into the design for an element of localization. The State name can be added into the design element in accordance with the approved ARNG style
Designs elements can be selected that have a State name built into the design for an element of localization. The State name can be added into the design element in accordance with the approved ARNG style
CS488 - Computer Graphics Anthony Perritano Brian Herman 12/12/2014
 The New Hotness: BLE Locative AR A Proximity- based Augmented Reality Drawing Tool CS488 - Computer Graphics Anthony Perritano (aperritano@gmail.com) Brian Herman (brianherman@gmail.com) 12/12/2014 1 Table
The New Hotness: BLE Locative AR A Proximity- based Augmented Reality Drawing Tool CS488 - Computer Graphics Anthony Perritano (aperritano@gmail.com) Brian Herman (brianherman@gmail.com) 12/12/2014 1 Table
Honours Project Proposal. Luke Ross Supervisor: Dr. Karen Bradshaw Department of Computer Science, Rhodes University
 Honours Project Proposal Luke Ross Supervisor: Dr. Karen Bradshaw Department of Computer Science, Rhodes University 2 March 2012 1. Principal Investigator Investigator - Luke Allan Ross Supervisor - Dr.
Honours Project Proposal Luke Ross Supervisor: Dr. Karen Bradshaw Department of Computer Science, Rhodes University 2 March 2012 1. Principal Investigator Investigator - Luke Allan Ross Supervisor - Dr.
Improving Initial Estimations for Structure from Motion Methods
 Improving Initial Estimations for Structure from Motion Methods University of Bonn Outline Motivation Computer-Vision Basics Stereo Vision Bundle Adjustment Feature Matching Global Initial Estimation Component
Improving Initial Estimations for Structure from Motion Methods University of Bonn Outline Motivation Computer-Vision Basics Stereo Vision Bundle Adjustment Feature Matching Global Initial Estimation Component
Final project bits and pieces
 Final project bits and pieces The project is expected to take four weeks of time for up to four people. At 12 hours per week per person that comes out to: ~192 hours of work for a four person team. Capstone:
Final project bits and pieces The project is expected to take four weeks of time for up to four people. At 12 hours per week per person that comes out to: ~192 hours of work for a four person team. Capstone:
Perspective Correction Implementation for Embedded (Marker-Based) Augmented Reality
 Augmented Reality") Perspective Correction Implementation for Embedded (Marker-Based) Augmented Reality Bernardo F. Reis, João Marcelo X. N. Teixeira, Veronica Teichrieb, Judith Kelner Universidade Federal de Pernambuco,
Perspective Correction Implementation for Embedded (Marker-Based) Augmented Reality Bernardo F. Reis, João Marcelo X. N. Teixeira, Veronica Teichrieb, Judith Kelner Universidade Federal de Pernambuco,
Single Camera Calibration
 Single Camera Calibration using Partially Visible Calibration Objects Based on Random Dots Marker Tracking Algorithm *Yuji Oyamada1,2, Pascal Fallavollita2, and Nassir Navab2 1. Keio University, Japan
Single Camera Calibration using Partially Visible Calibration Objects Based on Random Dots Marker Tracking Algorithm *Yuji Oyamada1,2, Pascal Fallavollita2, and Nassir Navab2 1. Keio University, Japan
Lecture 14: Basic Multi-View Geometry
 Lecture 14: Basic Multi-View Geometry Stereo If I needed to find out how far point is away from me, I could use triangulation and two views scene point image plane optical center (Graphic from Khurram
Lecture 14: Basic Multi-View Geometry Stereo If I needed to find out how far point is away from me, I could use triangulation and two views scene point image plane optical center (Graphic from Khurram
Natural Viewing 3D Display
 We will introduce a new category of Collaboration Projects, which will highlight DoCoMo s joint research activities with universities and other companies. DoCoMo carries out R&D to build up mobile communication,
We will introduce a new category of Collaboration Projects, which will highlight DoCoMo s joint research activities with universities and other companies. DoCoMo carries out R&D to build up mobile communication,
Step-by-Step Model Buidling
 Step-by-Step Model Buidling Review Feature selection Feature selection Feature correspondence Camera Calibration Euclidean Reconstruction Landing Augmented Reality Vision Based Control Sparse Structure
Step-by-Step Model Buidling Review Feature selection Feature selection Feature correspondence Camera Calibration Euclidean Reconstruction Landing Augmented Reality Vision Based Control Sparse Structure
Camera Models and Image Formation. Srikumar Ramalingam School of Computing University of Utah
 Camera Models and Image Formation Srikumar Ramalingam School of Computing University of Utah srikumar@cs.utah.edu VisualFunHouse.com 3D Street Art Image courtesy: Julian Beaver (VisualFunHouse.com) 3D
Camera Models and Image Formation Srikumar Ramalingam School of Computing University of Utah srikumar@cs.utah.edu VisualFunHouse.com 3D Street Art Image courtesy: Julian Beaver (VisualFunHouse.com) 3D
5LSH0 Advanced Topics Video & Analysis
 1 Multiview 3D video / Outline 2 Advanced Topics Multimedia Video (5LSH0), Module 02 3D Geometry, 3D Multiview Video Coding & Rendering Peter H.N. de With, Sveta Zinger & Y. Morvan ( p.h.n.de.with@tue.nl
1 Multiview 3D video / Outline 2 Advanced Topics Multimedia Video (5LSH0), Module 02 3D Geometry, 3D Multiview Video Coding & Rendering Peter H.N. de With, Sveta Zinger & Y. Morvan ( p.h.n.de.with@tue.nl
3D Corner Detection from Room Environment Using the Handy Video Camera
 3D Corner Detection from Room Environment Using the Handy Video Camera Ryo HIROSE, Hideo SAITO and Masaaki MOCHIMARU : Graduated School of Science and Technology, Keio University, Japan {ryo, saito}@ozawa.ics.keio.ac.jp
3D Corner Detection from Room Environment Using the Handy Video Camera Ryo HIROSE, Hideo SAITO and Masaaki MOCHIMARU : Graduated School of Science and Technology, Keio University, Japan {ryo, saito}@ozawa.ics.keio.ac.jp
MERGING POINT CLOUDS FROM MULTIPLE KINECTS. Nishant Rai 13th July, 2016 CARIS Lab University of British Columbia
 MERGING POINT CLOUDS FROM MULTIPLE KINECTS Nishant Rai 13th July, 2016 CARIS Lab University of British Columbia Introduction What do we want to do? : Use information (point clouds) from multiple (2+) Kinects
MERGING POINT CLOUDS FROM MULTIPLE KINECTS Nishant Rai 13th July, 2016 CARIS Lab University of British Columbia Introduction What do we want to do? : Use information (point clouds) from multiple (2+) Kinects
Weared Data; the Personal and Proprietary Nature of Data on Wearable Technology Devices. Dr. Michael Conyette
 Weared Data; the Personal and Proprietary Nature of Data on Wearable Technology Devices Dr. Michael Conyette Contents Rising demand for wearables. Driving factors for adoption. Changing marketplace for
Weared Data; the Personal and Proprietary Nature of Data on Wearable Technology Devices Dr. Michael Conyette Contents Rising demand for wearables. Driving factors for adoption. Changing marketplace for
EASY PROJECTOR AND MONOCHROME CAMERA CALIBRATION METHOD USING PLANE BOARD WITH MULTIPLE ENCODED MARKERS
 EASY PROJECTOR AND MONOCHROME CAMERA CALIBRATION METHOD USING PLANE BOARD WITH MULTIPLE ENCODED MARKERS Tatsuya Hanayama 1 Shota Kiyota 1 Ryo Furukawa 3 Hiroshi Kawasaki 1 1 Faculty of Engineering, Kagoshima
EASY PROJECTOR AND MONOCHROME CAMERA CALIBRATION METHOD USING PLANE BOARD WITH MULTIPLE ENCODED MARKERS Tatsuya Hanayama 1 Shota Kiyota 1 Ryo Furukawa 3 Hiroshi Kawasaki 1 1 Faculty of Engineering, Kagoshima
Image correspondences and structure from motion
 Image correspondences and structure from motion http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 20 Course announcements Homework 5 posted.
Image correspondences and structure from motion http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 20 Course announcements Homework 5 posted.
Estimating Camera Position And Posture by Using Feature Landmark Database
 Estimating Camera Position And Posture by Using Feature Landmark Database Motoko Oe 1, Tomokazu Sato 2 and Naokazu Yokoya 2 1 IBM Japan 2 Nara Institute of Science and Technology, Japan Abstract. Estimating
Estimating Camera Position And Posture by Using Feature Landmark Database Motoko Oe 1, Tomokazu Sato 2 and Naokazu Yokoya 2 1 IBM Japan 2 Nara Institute of Science and Technology, Japan Abstract. Estimating
Built Heritage 2013 Monitoring Conservation Management
 From video sequence as a database for the generation of 3D models to video as a tool for architecture communication Matteo Flavio Mancini; Alessia Moscarelli; Erald Mulla Sapienza Università di Roma, Facoltà
From video sequence as a database for the generation of 3D models to video as a tool for architecture communication Matteo Flavio Mancini; Alessia Moscarelli; Erald Mulla Sapienza Università di Roma, Facoltà
User manual for WIFI camera. Version 2.0
 User manual for WIFI camera Version 2.0 Congratulations on your new nest box with camera. When you have read and observed these instructions you are ready to offer the birds in your garden a new home,
User manual for WIFI camera Version 2.0 Congratulations on your new nest box with camera. When you have read and observed these instructions you are ready to offer the birds in your garden a new home,
Computer Vision. Introduction
 Computer Vision Introduction Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2016/2017 About this course Official
Computer Vision Introduction Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2016/2017 About this course Official
Camera Model and Calibration. Lecture-12
 Camera Model and Calibration Lecture-12 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Camera Model and Calibration Lecture-12 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
DAVOOD RASTI ALIREZA RASTI AUGMENTED REALITY FRAMEWORK AND DEMONSTRATOR. Master of Science Thesis
 DAVOOD RASTI ALIREZA RASTI AUGMENTED REALITY FRAMEWORK AND DEMONSTRATOR Master of Science Thesis Examiners: Adjunct Prof. Pekka Jääskeläinen and Timo Viitanen, MSc Examiner and topic approved on 1 st of
DAVOOD RASTI ALIREZA RASTI AUGMENTED REALITY FRAMEWORK AND DEMONSTRATOR Master of Science Thesis Examiners: Adjunct Prof. Pekka Jääskeläinen and Timo Viitanen, MSc Examiner and topic approved on 1 st of
WIRE BASICS ESTIMATED TIME REQUIRED. This tutorial will teach you the basics of sketching wires and using them as contours for solid objects.
 WIRE BASICS This tutorial will teach you the basics of sketching wires and using them as contours for solid objects. ESTIMATED TIME REQUIRED 30 Minutes LEARNING GOALS In this tutorial you will learn how
WIRE BASICS This tutorial will teach you the basics of sketching wires and using them as contours for solid objects. ESTIMATED TIME REQUIRED 30 Minutes LEARNING GOALS In this tutorial you will learn how
Large-Scale 3D Point Cloud Processing Tutorial 2013
 Large-Scale 3D Point Cloud Processing Tutorial 2013 Features The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well as changes in Prof.
Large-Scale 3D Point Cloud Processing Tutorial 2013 Features The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well as changes in Prof.
Assignment 2 : Projection and Homography
 TECHNISCHE UNIVERSITÄT DRESDEN EINFÜHRUNGSPRAKTIKUM COMPUTER VISION Assignment 2 : Projection and Homography Hassan Abu Alhaija November 7,204 INTRODUCTION In this exercise session we will get a hands-on
TECHNISCHE UNIVERSITÄT DRESDEN EINFÜHRUNGSPRAKTIKUM COMPUTER VISION Assignment 2 : Projection and Homography Hassan Abu Alhaija November 7,204 INTRODUCTION In this exercise session we will get a hands-on
Dealing with Scale. Stephan Weiss Computer Vision Group NASA-JPL / CalTech
 Dealing with Scale Stephan Weiss Computer Vision Group NASA-JPL / CalTech Stephan.Weiss@ieee.org (c) 2013. Government sponsorship acknowledged. Outline Why care about size? The IMU as scale provider: The
Dealing with Scale Stephan Weiss Computer Vision Group NASA-JPL / CalTech Stephan.Weiss@ieee.org (c) 2013. Government sponsorship acknowledged. Outline Why care about size? The IMU as scale provider: The
PART IV: RS & the Kinect
 Computer Vision on Rolling Shutter Cameras PART IV: RS & the Kinect Per-Erik Forssén, Erik Ringaby, Johan Hedborg Computer Vision Laboratory Dept. of Electrical Engineering Linköping University Tutorial
Computer Vision on Rolling Shutter Cameras PART IV: RS & the Kinect Per-Erik Forssén, Erik Ringaby, Johan Hedborg Computer Vision Laboratory Dept. of Electrical Engineering Linköping University Tutorial