Camera Registration in a 3D City Model. Min Ding CS294-6 Final Presentation Dec 13, 2006
|
|
|
- Vincent Foster
- 5 years ago
- Views:
Transcription

1 Camera Registration in a 3D City Model Min Ding CS294-6 Final Presentation Dec 13, 2006
2 Goal: Reconstruct 3D city model usable for virtual walk- and fly-throughs Virtual reality Urban planning Simulation Special effects Car navigation Objectives: Automated Photorealistic Fast Scalable



3 Aerial Image Registration for airborne modeling
4 Shortcomings of the existing approach 3D city model reconstruction from aerial LIDAR and oblique aerial photos alone High scalability, fast acquisition Manual correspondence or extensive computation for aerial photo texture mapping Automated texture mapping system is necessary
5 Camera registration algorithm overview Need to recover the intrinsic (focal length) and extrinsic (rotation, translation) parameters of a camera Assume zero skew, unit aspect ratio and principal point at the image center Stamp GPS and electronic compass readings to each aerial image obtain estimate of translation parameters and yaw angle(φ) Find focal length, pitch(θ) and roll(ψ) angles from vanishing points Refine estimates by projecting 3D points to an image and solving point correspondences on this image use 3D corners as feature points
6 Vanishing points detection literature review Existing techniques look for intersections among groups of lines Expectation Maximization Algorithm [Kosecka et al. 2002] RANSAC [Aguilera 2005] Gaussian sphere / Hough transform [Barnard 1983, Shufelt 1999] GPCA [Vidal et al. 2004] Perform well on indoor image or outdoor image with only a few buildings of simple geometry Difficult to apply to aerial image of complex urban scenes where multiple vanishing points exist

7 Vanishing points detection literature review
8 Vanishing points detection detection algorithm Iteratively find vanishing points Does not require a priori knowledge of number of vanishing points Remove line segments in each iteration Guaranteed convergence Initialize vanishing point to be intersection among nearly parallel lines Not pick up real intersection in 3D Refine vanishing point position with Levenberg-Marquardt algorithm at the end
9 Vanishing points detection selection algorithm 1. Fix the vanishing point with most number of segments 2. Choose two other points which make the orthocenter of the formed triangle closest to the image center Assume principal point at the image center v i v i v j v k v k v j

10 Vanishing point detection entire process
11 Camera calibration intrinsic parameter Standard uncalibrated camera model Three orthogonal vanishing points correspond to in homogenous coordinate
12 Camera calibration extrinsic parameters Obtained R does not belong to SO(3) R is the closest unitary matrix to R in Frobenius norm Decompose R into yaw, pitch and roll angles R = Rroll*Rpitch*Ryaw Update yaw angle from GPS reading R = Rroll*Rpitch*R yaw
 2.")
13 3D corners detection depth map From 299 Harris corners to 189 3D corners 1. Apply Harris corner detection on digital surface model (DSM) 2. Label a Harris corner as a 3D corner when two sufficiently long lines intersect at a right angle
 1.")

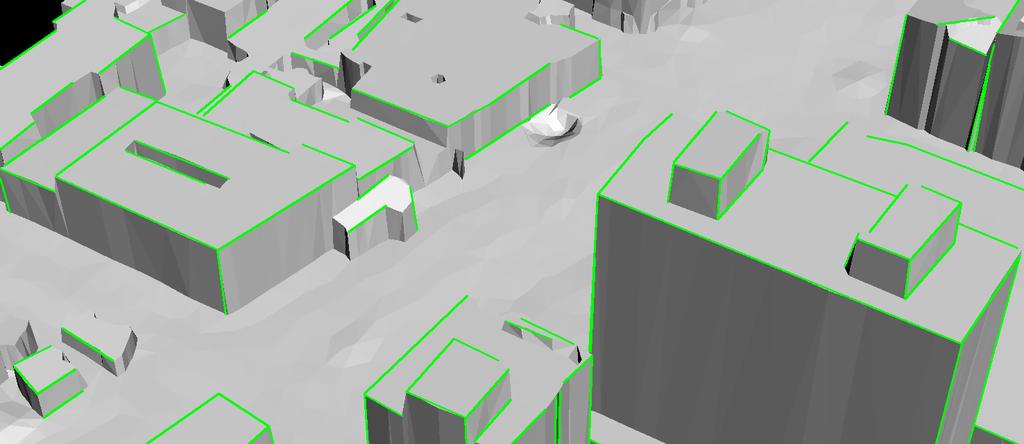
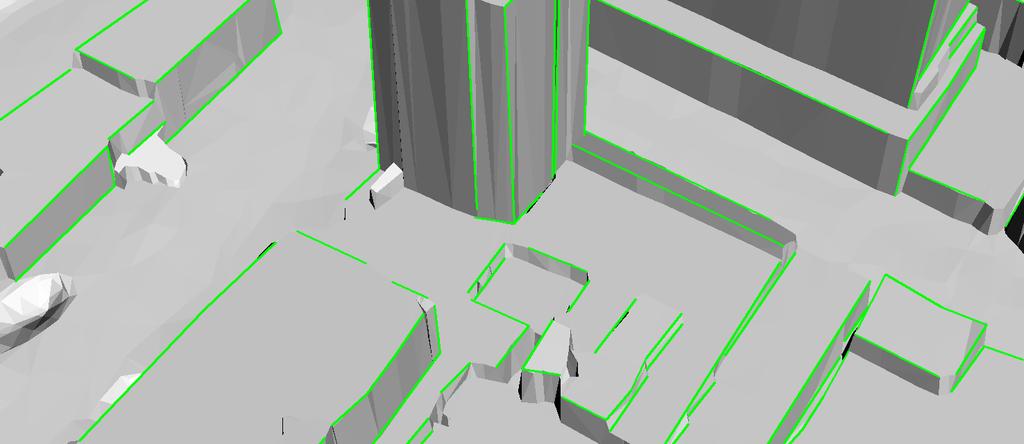
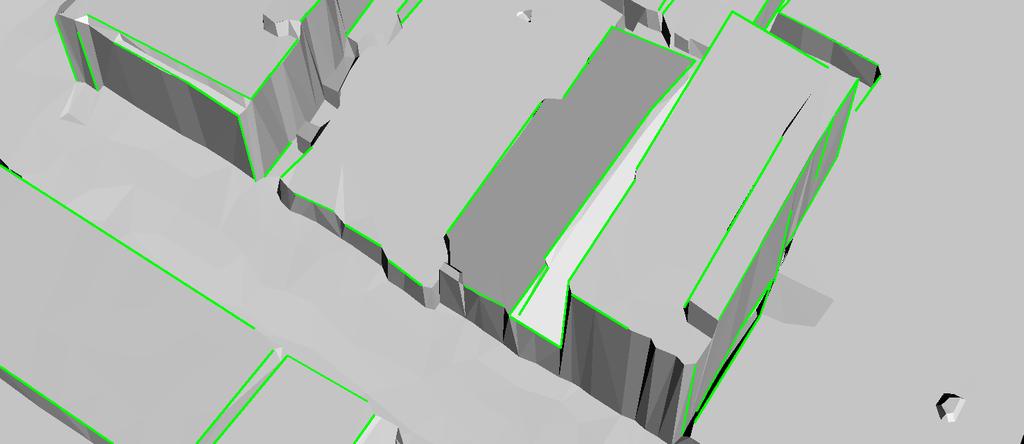
14 3D corners detection aerial image From 1964 end points to 283 3D corners (99 are real 3D corners) 1. Start from the end points of all the segments corresponding to the identified three orthogonal vanishing points 2. Label an end point as a 3D corner if there are two sufficiently long lines converging to the other two vanishing points in a region near this end point
15 Point correspondences on an image (?) Originally intended to run RANSAC to identify correspondence pairs based on the same fundamental matrix Vanishing point based automatic algorithm: f = Pitch = Roll = Manual correspondence Lowe s algorithm: f = Pitch = Roll =
16 Precision analysis in a controlled experiment Fix camera pose and rotate a calibration rig Apply vanishing points based automatic calibration algorithm to find pitch and roll which should be constant pitch: 82.5 (2.2 ) roll: (0.17 ) pitch: 66.3 (1.3 ) roll: (0.5 )
17 Conclusions and future directions Developed a fast and robust vanishing point detection for complex urban scenes Examined precision of vanishing point based camera calibration Difficult to obtain accurate parameters just from vanishing points in a complex urban setting Possible improvements include additional hardware (eg. 3-axis compass) apply stereo-vision (eg. video sequence)
Simultaneous Vanishing Point Detection and Camera Calibration from Single Images
 Simultaneous Vanishing Point Detection and Camera Calibration from Single Images Bo Li, Kun Peng, Xianghua Ying, and Hongbin Zha The Key Lab of Machine Perception (Ministry of Education), Peking University,
Simultaneous Vanishing Point Detection and Camera Calibration from Single Images Bo Li, Kun Peng, Xianghua Ying, and Hongbin Zha The Key Lab of Machine Perception (Ministry of Education), Peking University,
calibrated coordinates Linear transformation pixel coordinates
 1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
Step-by-Step Model Buidling
 Step-by-Step Model Buidling Review Feature selection Feature selection Feature correspondence Camera Calibration Euclidean Reconstruction Landing Augmented Reality Vision Based Control Sparse Structure
Step-by-Step Model Buidling Review Feature selection Feature selection Feature correspondence Camera Calibration Euclidean Reconstruction Landing Augmented Reality Vision Based Control Sparse Structure
Multiview Stereo COSC450. Lecture 8
 Multiview Stereo COSC450 Lecture 8 Stereo Vision So Far Stereo and epipolar geometry Fundamental matrix captures geometry 8-point algorithm Essential matrix with calibrated cameras 5-point algorithm Intersect
Multiview Stereo COSC450 Lecture 8 Stereo Vision So Far Stereo and epipolar geometry Fundamental matrix captures geometry 8-point algorithm Essential matrix with calibrated cameras 5-point algorithm Intersect
Structure from motion
 Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t R 2 3,t 3 Camera 1 Camera
Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t R 2 3,t 3 Camera 1 Camera
Camera Geometry II. COS 429 Princeton University
 Camera Geometry II COS 429 Princeton University Outline Projective geometry Vanishing points Application: camera calibration Application: single-view metrology Epipolar geometry Application: stereo correspondence
Camera Geometry II COS 429 Princeton University Outline Projective geometry Vanishing points Application: camera calibration Application: single-view metrology Epipolar geometry Application: stereo correspondence
Automated, 3D, Airborne Modeling of Large Scale Urban Environments by Min Ding. Research Project
 Automated, 3D, Airborne Modeling of Large Scale Urban Environments by Min Ding Research Project Submitted to the Department of Electrical Engineering and Computer Sciences, University of California at
Automated, 3D, Airborne Modeling of Large Scale Urban Environments by Min Ding Research Project Submitted to the Department of Electrical Engineering and Computer Sciences, University of California at
CS231A Midterm Review. Friday 5/6/2016
 CS231A Midterm Review Friday 5/6/2016 Outline General Logistics Camera Models Non-perspective cameras Calibration Single View Metrology Epipolar Geometry Structure from Motion Active Stereo and Volumetric
CS231A Midterm Review Friday 5/6/2016 Outline General Logistics Camera Models Non-perspective cameras Calibration Single View Metrology Epipolar Geometry Structure from Motion Active Stereo and Volumetric
Automatic registration of aerial imagery with untextured 3D LiDAR models
 Automatic registration of aerial imagery with untextured 3D LiDAR models Min Ding, Kristian Lyngbaek and Avideh Zakhor University of California, Berkeley Electrical Engineering and Computer Science Department
Automatic registration of aerial imagery with untextured 3D LiDAR models Min Ding, Kristian Lyngbaek and Avideh Zakhor University of California, Berkeley Electrical Engineering and Computer Science Department
Camera Calibration. Schedule. Jesus J Caban. Note: You have until next Monday to let me know. ! Today:! Camera calibration
 Camera Calibration Jesus J Caban Schedule! Today:! Camera calibration! Wednesday:! Lecture: Motion & Optical Flow! Monday:! Lecture: Medical Imaging! Final presentations:! Nov 29 th : W. Griffin! Dec 1
Camera Calibration Jesus J Caban Schedule! Today:! Camera calibration! Wednesday:! Lecture: Motion & Optical Flow! Monday:! Lecture: Medical Imaging! Final presentations:! Nov 29 th : W. Griffin! Dec 1
3D Reconstruction from Scene Knowledge
 Multiple-View Reconstruction from Scene Knowledge 3D Reconstruction from Scene Knowledge SYMMETRY & MULTIPLE-VIEW GEOMETRY Fundamental types of symmetry Equivalent views Symmetry based reconstruction MUTIPLE-VIEW
Multiple-View Reconstruction from Scene Knowledge 3D Reconstruction from Scene Knowledge SYMMETRY & MULTIPLE-VIEW GEOMETRY Fundamental types of symmetry Equivalent views Symmetry based reconstruction MUTIPLE-VIEW
arxiv: v1 [cs.cv] 28 Sep 2018
![arxiv: v1 [cs.cv] 28 Sep 2018](/thumbs/93/113542646.jpg "arxiv: v1 [cs.cv] 28 Sep 2018") Camera Pose Estimation from Sequence of Calibrated Images arxiv:1809.11066v1 [cs.cv] 28 Sep 2018 Jacek Komorowski 1 and Przemyslaw Rokita 2 1 Maria Curie-Sklodowska University, Institute of Computer Science,
Camera Pose Estimation from Sequence of Calibrated Images arxiv:1809.11066v1 [cs.cv] 28 Sep 2018 Jacek Komorowski 1 and Przemyslaw Rokita 2 1 Maria Curie-Sklodowska University, Institute of Computer Science,
Camera Models and Image Formation. Srikumar Ramalingam School of Computing University of Utah
 Camera Models and Image Formation Srikumar Ramalingam School of Computing University of Utah srikumar@cs.utah.edu Reference Most slides are adapted from the following notes: Some lecture notes on geometric
Camera Models and Image Formation Srikumar Ramalingam School of Computing University of Utah srikumar@cs.utah.edu Reference Most slides are adapted from the following notes: Some lecture notes on geometric
Vision par ordinateur
 Epipolar geometry π Vision par ordinateur Underlying structure in set of matches for rigid scenes l T 1 l 2 C1 m1 l1 e1 M L2 L1 e2 Géométrie épipolaire Fundamental matrix (x rank 2 matrix) m2 C2 l2 Frédéric
Epipolar geometry π Vision par ordinateur Underlying structure in set of matches for rigid scenes l T 1 l 2 C1 m1 l1 e1 M L2 L1 e2 Géométrie épipolaire Fundamental matrix (x rank 2 matrix) m2 C2 l2 Frédéric
CS201 Computer Vision Camera Geometry
 CS201 Computer Vision Camera Geometry John Magee 25 November, 2014 Slides Courtesy of: Diane H. Theriault (deht@bu.edu) Question of the Day: How can we represent the relationships between cameras and the
CS201 Computer Vision Camera Geometry John Magee 25 November, 2014 Slides Courtesy of: Diane H. Theriault (deht@bu.edu) Question of the Day: How can we represent the relationships between cameras and the
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry
 55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
3D Computer Vision. Structure from Motion. Prof. Didier Stricker
 3D Computer Vision Structure from Motion Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Structure
3D Computer Vision Structure from Motion Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Structure
Camera Model and Calibration
 Camera Model and Calibration Lecture-10 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Camera Model and Calibration Lecture-10 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Efficient Computation of Vanishing Points
 Efficient Computation of Vanishing Points Wei Zhang and Jana Kosecka 1 Department of Computer Science George Mason University, Fairfax, VA 223, USA {wzhang2, kosecka}@cs.gmu.edu Abstract Man-made environments
Efficient Computation of Vanishing Points Wei Zhang and Jana Kosecka 1 Department of Computer Science George Mason University, Fairfax, VA 223, USA {wzhang2, kosecka}@cs.gmu.edu Abstract Man-made environments
Flexible Calibration of a Portable Structured Light System through Surface Plane
 Vol. 34, No. 11 ACTA AUTOMATICA SINICA November, 2008 Flexible Calibration of a Portable Structured Light System through Surface Plane GAO Wei 1 WANG Liang 1 HU Zhan-Yi 1 Abstract For a portable structured
Vol. 34, No. 11 ACTA AUTOMATICA SINICA November, 2008 Flexible Calibration of a Portable Structured Light System through Surface Plane GAO Wei 1 WANG Liang 1 HU Zhan-Yi 1 Abstract For a portable structured
Unit 3 Multiple View Geometry
 Unit 3 Multiple View Geometry Relations between images of a scene Recovering the cameras Recovering the scene structure http://www.robots.ox.ac.uk/~vgg/hzbook/hzbook1.html 3D structure from images Recover
Unit 3 Multiple View Geometry Relations between images of a scene Recovering the cameras Recovering the scene structure http://www.robots.ox.ac.uk/~vgg/hzbook/hzbook1.html 3D structure from images Recover
Autonomous Navigation for Flying Robots
 Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 3.1: 3D Geometry Jürgen Sturm Technische Universität München Points in 3D 3D point Augmented vector Homogeneous
Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 3.1: 3D Geometry Jürgen Sturm Technische Universität München Points in 3D 3D point Augmented vector Homogeneous
Structure from Motion. Introduction to Computer Vision CSE 152 Lecture 10
 Structure from Motion CSE 152 Lecture 10 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 8: Structure from Motion Optional: Multiple View Geometry in Computer Vision, 2nd edition, Hartley
Structure from Motion CSE 152 Lecture 10 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 8: Structure from Motion Optional: Multiple View Geometry in Computer Vision, 2nd edition, Hartley
Lecture 9: Epipolar Geometry
 Lecture 9: Epipolar Geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Why is stereo useful? Epipolar constraints Essential and fundamental matrix Estimating F (Problem Set 2
Lecture 9: Epipolar Geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Why is stereo useful? Epipolar constraints Essential and fundamental matrix Estimating F (Problem Set 2
CSCI 5980: Assignment #3 Homography
 Submission Assignment due: Feb 23 Individual assignment. Write-up submission format: a single PDF up to 3 pages (more than 3 page assignment will be automatically returned.). Code and data. Submission
Submission Assignment due: Feb 23 Individual assignment. Write-up submission format: a single PDF up to 3 pages (more than 3 page assignment will be automatically returned.). Code and data. Submission
Camera Models and Image Formation. Srikumar Ramalingam School of Computing University of Utah
 Camera Models and Image Formation Srikumar Ramalingam School of Computing University of Utah srikumar@cs.utah.edu VisualFunHouse.com 3D Street Art Image courtesy: Julian Beaver (VisualFunHouse.com) 3D
Camera Models and Image Formation Srikumar Ramalingam School of Computing University of Utah srikumar@cs.utah.edu VisualFunHouse.com 3D Street Art Image courtesy: Julian Beaver (VisualFunHouse.com) 3D
Mosaics Construction from a Sparse Set of Views
 Mosaics Construction from a Sparse Set of Views W. Zhang, J. kosecka and F. Li Abstract In this paper we describe a flexible approach for constructing mosaics of architectural environments from a sparse
Mosaics Construction from a Sparse Set of Views W. Zhang, J. kosecka and F. Li Abstract In this paper we describe a flexible approach for constructing mosaics of architectural environments from a sparse
Estimation of Camera Pose with Respect to Terrestrial LiDAR Data
 Estimation of Camera Pose with Respect to Terrestrial LiDAR Data Wei Guan Suya You Guan Pang Computer Science Department University of Southern California, Los Angeles, USA Abstract In this paper, we present
Estimation of Camera Pose with Respect to Terrestrial LiDAR Data Wei Guan Suya You Guan Pang Computer Science Department University of Southern California, Los Angeles, USA Abstract In this paper, we present
Camera Model and Calibration. Lecture-12
 Camera Model and Calibration Lecture-12 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Camera Model and Calibration Lecture-12 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
An idea which can be used once is a trick. If it can be used more than once it becomes a method
 An idea which can be used once is a trick. If it can be used more than once it becomes a method - George Polya and Gabor Szego University of Texas at Arlington Rigid Body Transformations & Generalized
An idea which can be used once is a trick. If it can be used more than once it becomes a method - George Polya and Gabor Szego University of Texas at Arlington Rigid Body Transformations & Generalized
Structure from motion
 Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t 2 R 3,t 3 Camera 1 Camera
Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t 2 R 3,t 3 Camera 1 Camera
1 Projective Geometry
 CIS8, Machine Perception Review Problem - SPRING 26 Instructions. All coordinate systems are right handed. Projective Geometry Figure : Facade rectification. I took an image of a rectangular object, and
CIS8, Machine Perception Review Problem - SPRING 26 Instructions. All coordinate systems are right handed. Projective Geometry Figure : Facade rectification. I took an image of a rectangular object, and
FAST REGISTRATION OF TERRESTRIAL LIDAR POINT CLOUD AND SEQUENCE IMAGES
 FAST REGISTRATION OF TERRESTRIAL LIDAR POINT CLOUD AND SEQUENCE IMAGES Jie Shao a, Wuming Zhang a, Yaqiao Zhu b, Aojie Shen a a State Key Laboratory of Remote Sensing Science, Institute of Remote Sensing
FAST REGISTRATION OF TERRESTRIAL LIDAR POINT CLOUD AND SEQUENCE IMAGES Jie Shao a, Wuming Zhang a, Yaqiao Zhu b, Aojie Shen a a State Key Laboratory of Remote Sensing Science, Institute of Remote Sensing
Viewpoint Invariant Features from Single Images Using 3D Geometry
 Viewpoint Invariant Features from Single Images Using 3D Geometry Yanpeng Cao and John McDonald Department of Computer Science National University of Ireland, Maynooth, Ireland {y.cao,johnmcd}@cs.nuim.ie
Viewpoint Invariant Features from Single Images Using 3D Geometry Yanpeng Cao and John McDonald Department of Computer Science National University of Ireland, Maynooth, Ireland {y.cao,johnmcd}@cs.nuim.ie
Overview. Augmented reality and applications Marker-based augmented reality. Camera model. Binary markers Textured planar markers
 Augmented reality Overview Augmented reality and applications Marker-based augmented reality Binary markers Textured planar markers Camera model Homography Direct Linear Transformation What is augmented
Augmented reality Overview Augmented reality and applications Marker-based augmented reality Binary markers Textured planar markers Camera model Homography Direct Linear Transformation What is augmented
Stereo CSE 576. Ali Farhadi. Several slides from Larry Zitnick and Steve Seitz
 Stereo CSE 576 Ali Farhadi Several slides from Larry Zitnick and Steve Seitz Why do we perceive depth? What do humans use as depth cues? Motion Convergence When watching an object close to us, our eyes
Stereo CSE 576 Ali Farhadi Several slides from Larry Zitnick and Steve Seitz Why do we perceive depth? What do humans use as depth cues? Motion Convergence When watching an object close to us, our eyes
Image correspondences and structure from motion
 Image correspondences and structure from motion http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 20 Course announcements Homework 5 posted.
Image correspondences and structure from motion http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 20 Course announcements Homework 5 posted.
METRIC PLANE RECTIFICATION USING SYMMETRIC VANISHING POINTS
 METRIC PLANE RECTIFICATION USING SYMMETRIC VANISHING POINTS M. Lefler, H. Hel-Or Dept. of CS, University of Haifa, Israel Y. Hel-Or School of CS, IDC, Herzliya, Israel ABSTRACT Video analysis often requires
METRIC PLANE RECTIFICATION USING SYMMETRIC VANISHING POINTS M. Lefler, H. Hel-Or Dept. of CS, University of Haifa, Israel Y. Hel-Or School of CS, IDC, Herzliya, Israel ABSTRACT Video analysis often requires
CS223b Midterm Exam, Computer Vision. Monday February 25th, Winter 2008, Prof. Jana Kosecka
 CS223b Midterm Exam, Computer Vision Monday February 25th, Winter 2008, Prof. Jana Kosecka Your name email This exam is 8 pages long including cover page. Make sure your exam is not missing any pages.
CS223b Midterm Exam, Computer Vision Monday February 25th, Winter 2008, Prof. Jana Kosecka Your name email This exam is 8 pages long including cover page. Make sure your exam is not missing any pages.
Identifying Car Model from Photographs
 Identifying Car Model from Photographs Fine grained Classification using 3D Reconstruction and 3D Shape Registration Xinheng Li davidxli@stanford.edu Abstract Fine grained classification from photographs
Identifying Car Model from Photographs Fine grained Classification using 3D Reconstruction and 3D Shape Registration Xinheng Li davidxli@stanford.edu Abstract Fine grained classification from photographs
BIL Computer Vision Apr 16, 2014
 BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
Stereo and Epipolar geometry
 Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
Vision Review: Image Formation. Course web page:
 Vision Review: Image Formation Course web page: www.cis.udel.edu/~cer/arv September 10, 2002 Announcements Lecture on Thursday will be about Matlab; next Tuesday will be Image Processing The dates some
Vision Review: Image Formation Course web page: www.cis.udel.edu/~cer/arv September 10, 2002 Announcements Lecture on Thursday will be about Matlab; next Tuesday will be Image Processing The dates some
3D FACE RECONSTRUCTION BASED ON EPIPOLAR GEOMETRY
 IJDW Volume 4 Number January-June 202 pp. 45-50 3D FACE RECONSRUCION BASED ON EPIPOLAR GEOMERY aher Khadhraoui, Faouzi Benzarti 2 and Hamid Amiri 3,2,3 Signal, Image Processing and Patterns Recognition
IJDW Volume 4 Number January-June 202 pp. 45-50 3D FACE RECONSRUCION BASED ON EPIPOLAR GEOMERY aher Khadhraoui, Faouzi Benzarti 2 and Hamid Amiri 3,2,3 Signal, Image Processing and Patterns Recognition
Outline. ETN-FPI Training School on Plenoptic Sensing
 Outline Introduction Part I: Basics of Mathematical Optimization Linear Least Squares Nonlinear Optimization Part II: Basics of Computer Vision Camera Model Multi-Camera Model Multi-Camera Calibration
Outline Introduction Part I: Basics of Mathematical Optimization Linear Least Squares Nonlinear Optimization Part II: Basics of Computer Vision Camera Model Multi-Camera Model Multi-Camera Calibration
Hartley - Zisserman reading club. Part I: Hartley and Zisserman Appendix 6: Part II: Zhengyou Zhang: Presented by Daniel Fontijne
 Hartley - Zisserman reading club Part I: Hartley and Zisserman Appendix 6: Iterative estimation methods Part II: Zhengyou Zhang: A Flexible New Technique for Camera Calibration Presented by Daniel Fontijne
Hartley - Zisserman reading club Part I: Hartley and Zisserman Appendix 6: Iterative estimation methods Part II: Zhengyou Zhang: A Flexible New Technique for Camera Calibration Presented by Daniel Fontijne
Index. 3D reconstruction, point algorithm, point algorithm, point algorithm, point algorithm, 253
 Index 3D reconstruction, 123 5+1-point algorithm, 274 5-point algorithm, 260 7-point algorithm, 255 8-point algorithm, 253 affine point, 43 affine transformation, 55 affine transformation group, 55 affine
Index 3D reconstruction, 123 5+1-point algorithm, 274 5-point algorithm, 260 7-point algorithm, 255 8-point algorithm, 253 affine point, 43 affine transformation, 55 affine transformation group, 55 affine
Alignment of Continuous Video onto 3D Point Clouds
 1 Alignment of Continuous Video onto 3D Point Clouds W. Zhao 1, D. Nister 2, and S. Hsu Sarnoff Corporation 201 Washington Road Princeton, NJ 08540, USA email: { wzhao, dnister, shsu }@sarnoff.com Tel:
1 Alignment of Continuous Video onto 3D Point Clouds W. Zhao 1, D. Nister 2, and S. Hsu Sarnoff Corporation 201 Washington Road Princeton, NJ 08540, USA email: { wzhao, dnister, shsu }@sarnoff.com Tel:
Multiple View Geometry
 Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
CS231M Mobile Computer Vision Structure from motion
 CS231M Mobile Computer Vision Structure from motion - Cameras - Epipolar geometry - Structure from motion Pinhole camera Pinhole perspective projection f o f = focal length o = center of the camera z y
CS231M Mobile Computer Vision Structure from motion - Cameras - Epipolar geometry - Structure from motion Pinhole camera Pinhole perspective projection f o f = focal length o = center of the camera z y
Miniature faking. In close-up photo, the depth of field is limited.
 Miniature faking In close-up photo, the depth of field is limited. http://en.wikipedia.org/wiki/file:jodhpur_tilt_shift.jpg Miniature faking Miniature faking http://en.wikipedia.org/wiki/file:oregon_state_beavers_tilt-shift_miniature_greg_keene.jpg
Miniature faking In close-up photo, the depth of field is limited. http://en.wikipedia.org/wiki/file:jodhpur_tilt_shift.jpg Miniature faking Miniature faking http://en.wikipedia.org/wiki/file:oregon_state_beavers_tilt-shift_miniature_greg_keene.jpg
3D Sensing and Reconstruction Readings: Ch 12: , Ch 13: ,
 3D Sensing and Reconstruction Readings: Ch 12: 12.5-6, Ch 13: 13.1-3, 13.9.4 Perspective Geometry Camera Model Stereo Triangulation 3D Reconstruction by Space Carving 3D Shape from X means getting 3D coordinates
3D Sensing and Reconstruction Readings: Ch 12: 12.5-6, Ch 13: 13.1-3, 13.9.4 Perspective Geometry Camera Model Stereo Triangulation 3D Reconstruction by Space Carving 3D Shape from X means getting 3D coordinates
Machine learning based automatic extrinsic calibration of an onboard monocular camera for driving assistance applications on smart mobile devices
 Technical University of Cluj-Napoca Image Processing and Pattern Recognition Research Center www.cv.utcluj.ro Machine learning based automatic extrinsic calibration of an onboard monocular camera for driving
Technical University of Cluj-Napoca Image Processing and Pattern Recognition Research Center www.cv.utcluj.ro Machine learning based automatic extrinsic calibration of an onboard monocular camera for driving
Exploitation of GPS-Control Points in low-contrast IR-imagery for homography estimation
 Exploitation of GPS-Control Points in low-contrast IR-imagery for homography estimation Patrick Dunau 1 Fraunhofer-Institute, of Optronics, Image Exploitation and System Technologies (IOSB), Gutleuthausstr.
Exploitation of GPS-Control Points in low-contrast IR-imagery for homography estimation Patrick Dunau 1 Fraunhofer-Institute, of Optronics, Image Exploitation and System Technologies (IOSB), Gutleuthausstr.
Index. 3D reconstruction, point algorithm, point algorithm, point algorithm, point algorithm, 263
 Index 3D reconstruction, 125 5+1-point algorithm, 284 5-point algorithm, 270 7-point algorithm, 265 8-point algorithm, 263 affine point, 45 affine transformation, 57 affine transformation group, 57 affine
Index 3D reconstruction, 125 5+1-point algorithm, 284 5-point algorithm, 270 7-point algorithm, 265 8-point algorithm, 263 affine point, 45 affine transformation, 57 affine transformation group, 57 affine
Announcements. Stereo
 Announcements Stereo Homework 2 is due today, 11:59 PM Homework 3 will be assigned today Reading: Chapter 7: Stereopsis CSE 152 Lecture 8 Binocular Stereopsis: Mars Given two images of a scene where relative
Announcements Stereo Homework 2 is due today, 11:59 PM Homework 3 will be assigned today Reading: Chapter 7: Stereopsis CSE 152 Lecture 8 Binocular Stereopsis: Mars Given two images of a scene where relative
Recovering structure from a single view Pinhole perspective projection
 EPIPOLAR GEOMETRY The slides are from several sources through James Hays (Brown); Silvio Savarese (U. of Michigan); Svetlana Lazebnik (U. Illinois); Bill Freeman and Antonio Torralba (MIT), including their
EPIPOLAR GEOMETRY The slides are from several sources through James Hays (Brown); Silvio Savarese (U. of Michigan); Svetlana Lazebnik (U. Illinois); Bill Freeman and Antonio Torralba (MIT), including their
LUMS Mine Detector Project
 LUMS Mine Detector Project Using visual information to control a robot (Hutchinson et al. 1996). Vision may or may not be used in the feedback loop. Visual (image based) features such as points, lines
LUMS Mine Detector Project Using visual information to control a robot (Hutchinson et al. 1996). Vision may or may not be used in the feedback loop. Visual (image based) features such as points, lines
3D Reconstruction of a Hopkins Landmark
 3D Reconstruction of a Hopkins Landmark Ayushi Sinha (461), Hau Sze (461), Diane Duros (361) Abstract - This paper outlines a method for 3D reconstruction from two images. Our procedure is based on known
3D Reconstruction of a Hopkins Landmark Ayushi Sinha (461), Hau Sze (461), Diane Duros (361) Abstract - This paper outlines a method for 3D reconstruction from two images. Our procedure is based on known
Two-view geometry Computer Vision Spring 2018, Lecture 10
 Two-view geometry http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 10 Course announcements Homework 2 is due on February 23 rd. - Any questions about the homework? - How many of
Two-view geometry http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 10 Course announcements Homework 2 is due on February 23 rd. - Any questions about the homework? - How many of
Computer Vision Lecture 17
 Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Scene Modeling for a Single View
 Scene Modeling for a Single View René MAGRITTE Portrait d'edward James with a lot of slides stolen from Steve Seitz and David Brogan, Breaking out of 2D now we are ready to break out of 2D And enter the
Scene Modeling for a Single View René MAGRITTE Portrait d'edward James with a lot of slides stolen from Steve Seitz and David Brogan, Breaking out of 2D now we are ready to break out of 2D And enter the
Computer Vision Lecture 17
 Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
A COMPREHENSIVE TOOL FOR RECOVERING 3D MODELS FROM 2D PHOTOS WITH WIDE BASELINES
 A COMPREHENSIVE TOOL FOR RECOVERING 3D MODELS FROM 2D PHOTOS WITH WIDE BASELINES Yuzhu Lu Shana Smith Virtual Reality Applications Center, Human Computer Interaction Program, Iowa State University, Ames,
A COMPREHENSIVE TOOL FOR RECOVERING 3D MODELS FROM 2D PHOTOS WITH WIDE BASELINES Yuzhu Lu Shana Smith Virtual Reality Applications Center, Human Computer Interaction Program, Iowa State University, Ames,
Application questions. Theoretical questions
 The oral exam will last 30 minutes and will consist of one application question followed by two theoretical questions. Please find below a non exhaustive list of possible application questions. The list
The oral exam will last 30 minutes and will consist of one application question followed by two theoretical questions. Please find below a non exhaustive list of possible application questions. The list
UNIVERSITY OF TORONTO Faculty of Applied Science and Engineering. ROB501H1 F: Computer Vision for Robotics. Midterm Examination.
 UNIVERSITY OF TORONTO Faculty of Applied Science and Engineering ROB501H1 F: Computer Vision for Robotics October 26, 2016 Student Name: Student Number: Instructions: 1. Attempt all questions. 2. The value
UNIVERSITY OF TORONTO Faculty of Applied Science and Engineering ROB501H1 F: Computer Vision for Robotics October 26, 2016 Student Name: Student Number: Instructions: 1. Attempt all questions. 2. The value
Multi-View AAM Fitting and Camera Calibration
 To appear in the IEEE International Conference on Computer Vision Multi-View AAM Fitting and Camera Calibration Seth Koterba, Simon Baker, Iain Matthews, Changbo Hu, Jing Xiao, Jeffrey Cohn, and Takeo
To appear in the IEEE International Conference on Computer Vision Multi-View AAM Fitting and Camera Calibration Seth Koterba, Simon Baker, Iain Matthews, Changbo Hu, Jing Xiao, Jeffrey Cohn, and Takeo
Stereo. 11/02/2012 CS129, Brown James Hays. Slides by Kristen Grauman
 Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
Lecture 10: Multi-view geometry
 Lecture 10: Multi-view geometry Professor Stanford Vision Lab 1 What we will learn today? Review for stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Lecture 10: Multi-view geometry Professor Stanford Vision Lab 1 What we will learn today? Review for stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Rigid Body Motion and Image Formation. Jana Kosecka, CS 482
 Rigid Body Motion and Image Formation Jana Kosecka, CS 482 A free vector is defined by a pair of points : Coordinates of the vector : 1 3D Rotation of Points Euler angles Rotation Matrices in 3D 3 by 3
Rigid Body Motion and Image Formation Jana Kosecka, CS 482 A free vector is defined by a pair of points : Coordinates of the vector : 1 3D Rotation of Points Euler angles Rotation Matrices in 3D 3 by 3
Pin Hole Cameras & Warp Functions
 Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Example of SLAM for AR Taken from:
Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Example of SLAM for AR Taken from:
Three-Dimensional Viewing Hearn & Baker Chapter 7
 Three-Dimensional Viewing Hearn & Baker Chapter 7 Overview 3D viewing involves some tasks that are not present in 2D viewing: Projection, Visibility checks, Lighting effects, etc. Overview First, set up
Three-Dimensional Viewing Hearn & Baker Chapter 7 Overview 3D viewing involves some tasks that are not present in 2D viewing: Projection, Visibility checks, Lighting effects, etc. Overview First, set up
Extracting Vanishing Points across Multiple Views
 Extracting Vanishing Points across Multiple Views Michael Horna c ek1,2 and Stefan Maierhofer1 1 VRVis Research Center 2 Institute of Photogrammetry and Remote Sensing Vienna University of Technology Abstract
Extracting Vanishing Points across Multiple Views Michael Horna c ek1,2 and Stefan Maierhofer1 1 VRVis Research Center 2 Institute of Photogrammetry and Remote Sensing Vienna University of Technology Abstract
A Factorization Method for Structure from Planar Motion
 A Factorization Method for Structure from Planar Motion Jian Li and Rama Chellappa Center for Automation Research (CfAR) and Department of Electrical and Computer Engineering University of Maryland, College
A Factorization Method for Structure from Planar Motion Jian Li and Rama Chellappa Center for Automation Research (CfAR) and Department of Electrical and Computer Engineering University of Maryland, College
3D Sensing. 3D Shape from X. Perspective Geometry. Camera Model. Camera Calibration. General Stereo Triangulation.
 3D Sensing 3D Shape from X Perspective Geometry Camera Model Camera Calibration General Stereo Triangulation 3D Reconstruction 3D Shape from X shading silhouette texture stereo light striping motion mainly
3D Sensing 3D Shape from X Perspective Geometry Camera Model Camera Calibration General Stereo Triangulation 3D Reconstruction 3D Shape from X shading silhouette texture stereo light striping motion mainly
CS4670: Computer Vision
 CS467: Computer Vision Noah Snavely Lecture 13: Projection, Part 2 Perspective study of a vase by Paolo Uccello Szeliski 2.1.3-2.1.6 Reading Announcements Project 2a due Friday, 8:59pm Project 2b out Friday
CS467: Computer Vision Noah Snavely Lecture 13: Projection, Part 2 Perspective study of a vase by Paolo Uccello Szeliski 2.1.3-2.1.6 Reading Announcements Project 2a due Friday, 8:59pm Project 2b out Friday
CIS 580, Machine Perception, Spring 2016 Homework 2 Due: :59AM
 CIS 580, Machine Perception, Spring 2016 Homework 2 Due: 2015.02.24. 11:59AM Instructions. Submit your answers in PDF form to Canvas. This is an individual assignment. 1 Recover camera orientation By observing
CIS 580, Machine Perception, Spring 2016 Homework 2 Due: 2015.02.24. 11:59AM Instructions. Submit your answers in PDF form to Canvas. This is an individual assignment. 1 Recover camera orientation By observing
Geometry of Multiple views
 1 Geometry of Multiple views CS 554 Computer Vision Pinar Duygulu Bilkent University 2 Multiple views Despite the wealth of information contained in a a photograph, the depth of a scene point along the
1 Geometry of Multiple views CS 554 Computer Vision Pinar Duygulu Bilkent University 2 Multiple views Despite the wealth of information contained in a a photograph, the depth of a scene point along the
Announcements. Stereo
 Announcements Stereo Homework 1 is due today, 11:59 PM Homework 2 will be assigned on Thursday Reading: Chapter 7: Stereopsis CSE 252A Lecture 8 Binocular Stereopsis: Mars Given two images of a scene where
Announcements Stereo Homework 1 is due today, 11:59 PM Homework 2 will be assigned on Thursday Reading: Chapter 7: Stereopsis CSE 252A Lecture 8 Binocular Stereopsis: Mars Given two images of a scene where
Video Georegistration: Key Challenges. Steve Blask Harris Corporation GCSD Melbourne, FL 32934
 Video Georegistration: Key Challenges Steve Blask sblask@harris.com Harris Corporation GCSD Melbourne, FL 32934 Definitions Registration: image to image alignment Find pixel-to-pixel correspondences between
Video Georegistration: Key Challenges Steve Blask sblask@harris.com Harris Corporation GCSD Melbourne, FL 32934 Definitions Registration: image to image alignment Find pixel-to-pixel correspondences between
Chapters 1 9: Overview
 Chapters 1 9: Overview Chapter 1: Introduction Chapters 2 4: Data acquisition Chapters 5 9: Data manipulation Chapter 5: Vertical imagery Chapter 6: Image coordinate measurements and refinements Chapters
Chapters 1 9: Overview Chapter 1: Introduction Chapters 2 4: Data acquisition Chapters 5 9: Data manipulation Chapter 5: Vertical imagery Chapter 6: Image coordinate measurements and refinements Chapters
Automatic Registration of LiDAR and Optical Imagery using Depth Map Stereo
 Automatic Registration of LiDAR and Optical Imagery using Depth Map Stereo Hyojin Kim Lawrence Livermore National Laboratory kim63@llnl.gov Carlos D. Correa Google Inc. cdcorrea@google.com Nelson Max University
Automatic Registration of LiDAR and Optical Imagery using Depth Map Stereo Hyojin Kim Lawrence Livermore National Laboratory kim63@llnl.gov Carlos D. Correa Google Inc. cdcorrea@google.com Nelson Max University
Single-view 3D Reconstruction
 Single-view 3D Reconstruction 10/12/17 Computational Photography Derek Hoiem, University of Illinois Some slides from Alyosha Efros, Steve Seitz Notes about Project 4 (Image-based Lighting) You can work
Single-view 3D Reconstruction 10/12/17 Computational Photography Derek Hoiem, University of Illinois Some slides from Alyosha Efros, Steve Seitz Notes about Project 4 (Image-based Lighting) You can work
Computer Vision Projective Geometry and Calibration. Pinhole cameras
 Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
MAPI Computer Vision. Multiple View Geometry
 MAPI Computer Vision Multiple View Geometry Geometry o Multiple Views 2- and 3- view geometry p p Kpˆ [ K R t]p Geometry o Multiple Views 2- and 3- view geometry Epipolar Geometry The epipolar geometry
MAPI Computer Vision Multiple View Geometry Geometry o Multiple Views 2- and 3- view geometry p p Kpˆ [ K R t]p Geometry o Multiple Views 2- and 3- view geometry Epipolar Geometry The epipolar geometry
Epipolar Geometry Prof. D. Stricker. With slides from A. Zisserman, S. Lazebnik, Seitz
 Epipolar Geometry Prof. D. Stricker With slides from A. Zisserman, S. Lazebnik, Seitz 1 Outline 1. Short introduction: points and lines 2. Two views geometry: Epipolar geometry Relation point/line in two
Epipolar Geometry Prof. D. Stricker With slides from A. Zisserman, S. Lazebnik, Seitz 1 Outline 1. Short introduction: points and lines 2. Two views geometry: Epipolar geometry Relation point/line in two
The Geometry Behind the Numerical Reconstruction of Two Photos
 The Geometry Behind the Numerical Reconstruction of Two Photos Hellmuth Stachel stachel@dmg.tuwien.ac.at http://www.geometrie.tuwien.ac.at/stachel ICEGD 2007, The 2 nd Internat. Conf. on Eng g Graphics
The Geometry Behind the Numerical Reconstruction of Two Photos Hellmuth Stachel stachel@dmg.tuwien.ac.at http://www.geometrie.tuwien.ac.at/stachel ICEGD 2007, The 2 nd Internat. Conf. on Eng g Graphics
Feature Transfer and Matching in Disparate Stereo Views through the use of Plane Homographies
 Feature Transfer and Matching in Disparate Stereo Views through the use of Plane Homographies M. Lourakis, S. Tzurbakis, A. Argyros, S. Orphanoudakis Computer Vision and Robotics Lab (CVRL) Institute of
Feature Transfer and Matching in Disparate Stereo Views through the use of Plane Homographies M. Lourakis, S. Tzurbakis, A. Argyros, S. Orphanoudakis Computer Vision and Robotics Lab (CVRL) Institute of
Using Pedestrians Walking on Uneven Terrains for Camera Calibration
 Machine Vision and Applications manuscript No. (will be inserted by the editor) Using Pedestrians Walking on Uneven Terrains for Camera Calibration Imran N. Junejo Department of Computer Science, University
Machine Vision and Applications manuscript No. (will be inserted by the editor) Using Pedestrians Walking on Uneven Terrains for Camera Calibration Imran N. Junejo Department of Computer Science, University
COS429: COMPUTER VISON CAMERAS AND PROJECTIONS (2 lectures)
") COS429: COMPUTER VISON CMERS ND PROJECTIONS (2 lectures) Pinhole cameras Camera with lenses Sensing nalytical Euclidean geometry The intrinsic parameters of a camera The extrinsic parameters of a camera
COS429: COMPUTER VISON CMERS ND PROJECTIONS (2 lectures) Pinhole cameras Camera with lenses Sensing nalytical Euclidean geometry The intrinsic parameters of a camera The extrinsic parameters of a camera
Measurement of Pedestrian Groups Using Subtraction Stereo
 Measurement of Pedestrian Groups Using Subtraction Stereo Kenji Terabayashi, Yuki Hashimoto, and Kazunori Umeda Chuo University / CREST, JST, 1-13-27 Kasuga, Bunkyo-ku, Tokyo 112-8551, Japan terabayashi@mech.chuo-u.ac.jp
Measurement of Pedestrian Groups Using Subtraction Stereo Kenji Terabayashi, Yuki Hashimoto, and Kazunori Umeda Chuo University / CREST, JST, 1-13-27 Kasuga, Bunkyo-ku, Tokyo 112-8551, Japan terabayashi@mech.chuo-u.ac.jp
arxiv: v1 [cs.cv] 28 Sep 2018
![arxiv: v1 [cs.cv] 28 Sep 2018](/thumbs/91/106305353.jpg "arxiv: v1 [cs.cv] 28 Sep 2018") Extrinsic camera calibration method and its performance evaluation Jacek Komorowski 1 and Przemyslaw Rokita 2 arxiv:1809.11073v1 [cs.cv] 28 Sep 2018 1 Maria Curie Sklodowska University Lublin, Poland jacek.komorowski@gmail.com
Extrinsic camera calibration method and its performance evaluation Jacek Komorowski 1 and Przemyslaw Rokita 2 arxiv:1809.11073v1 [cs.cv] 28 Sep 2018 1 Maria Curie Sklodowska University Lublin, Poland jacek.komorowski@gmail.com
JRC 3D Reconstructor CAMERA CALIBRATION & ORIENTATION
 Gexcel JRC 3D Reconstructor CAMERA CALIBRATION & ORIENTATION In this tutorial you will learn how to Include in the project external digital pictures of the scene you are modeling Calculate the original
Gexcel JRC 3D Reconstructor CAMERA CALIBRATION & ORIENTATION In this tutorial you will learn how to Include in the project external digital pictures of the scene you are modeling Calculate the original
Fast Outlier Rejection by Using Parallax-Based Rigidity Constraint for Epipolar Geometry Estimation
 Fast Outlier Rejection by Using Parallax-Based Rigidity Constraint for Epipolar Geometry Estimation Engin Tola 1 and A. Aydın Alatan 2 1 Computer Vision Laboratory, Ecóle Polytechnique Fédéral de Lausanne
Fast Outlier Rejection by Using Parallax-Based Rigidity Constraint for Epipolar Geometry Estimation Engin Tola 1 and A. Aydın Alatan 2 1 Computer Vision Laboratory, Ecóle Polytechnique Fédéral de Lausanne
Computer Vision cmput 428/615
 Computer Vision cmput 428/615 Basic 2D and 3D geometry and Camera models Martin Jagersand The equation of projection Intuitively: How do we develop a consistent mathematical framework for projection calculations?
Computer Vision cmput 428/615 Basic 2D and 3D geometry and Camera models Martin Jagersand The equation of projection Intuitively: How do we develop a consistent mathematical framework for projection calculations?
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 5: Projection Reading: Szeliski 2.1 Projection Reading: Szeliski 2.1 Projection Müller Lyer Illusion http://www.michaelbach.de/ot/sze_muelue/index.html Modeling
CS6670: Computer Vision Noah Snavely Lecture 5: Projection Reading: Szeliski 2.1 Projection Reading: Szeliski 2.1 Projection Müller Lyer Illusion http://www.michaelbach.de/ot/sze_muelue/index.html Modeling
Camera model and multiple view geometry
 Chapter Camera model and multiple view geometry Before discussing how D information can be obtained from images it is important to know how images are formed First the camera model is introduced and then
Chapter Camera model and multiple view geometry Before discussing how D information can be obtained from images it is important to know how images are formed First the camera model is introduced and then
Image Transformations & Camera Calibration. Mašinska vizija, 2018.
 Image Transformations & Camera Calibration Mašinska vizija, 2018. Image transformations What ve we learnt so far? Example 1 resize and rotate Open warp_affine_template.cpp Perform simple resize
Image Transformations & Camera Calibration Mašinska vizija, 2018. Image transformations What ve we learnt so far? Example 1 resize and rotate Open warp_affine_template.cpp Perform simple resize
Exterior Orientation Parameters
 Exterior Orientation Parameters PERS 12/2001 pp 1321-1332 Karsten Jacobsen, Institute for Photogrammetry and GeoInformation, University of Hannover, Germany The georeference of any photogrammetric product
Exterior Orientation Parameters PERS 12/2001 pp 1321-1332 Karsten Jacobsen, Institute for Photogrammetry and GeoInformation, University of Hannover, Germany The georeference of any photogrammetric product
AIT Inline Computational Imaging: Geometric calibration and image rectification
 AIT Inline Computational Imaging: Geometric calibration and image rectification B. Blaschitz, S. Štolc and S. Breuss AIT Austrian Institute of Technology GmbH Center for Vision, Automation & Control Vienna,
AIT Inline Computational Imaging: Geometric calibration and image rectification B. Blaschitz, S. Štolc and S. Breuss AIT Austrian Institute of Technology GmbH Center for Vision, Automation & Control Vienna,