Visual Tracking. Image Processing Laboratory Dipartimento di Matematica e Informatica Università degli studi di Catania.
|
|
|
- Jemimah George
- 6 years ago
- Views:
Transcription
1 Image Processing Laboratory Dipartimento di Matematica e Informatica Università degli studi di Catania 1
2 What is visual tracking? estimation of the target location over time 2
3 applications Six main areas: 3 Media production and augmented reality Medical applications and biological research Surveillance and business applications Robotics and unmanned vehicles Tele-collaboration and interactive gaming Art installations and performances

4 Applications motion capture: videogames, movies 4

5 Applications performance analysis: sport 5

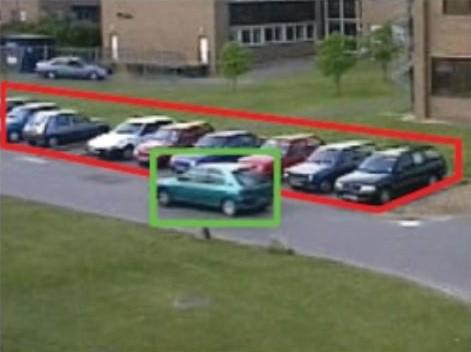
6 Applications video surveillance 6

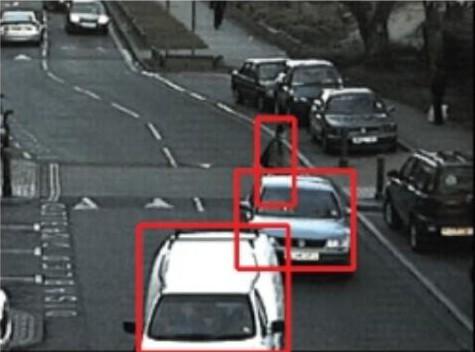
7 Applications traffic monitoring 7
8 Problem Formulation estimation of the target state over time Let be the frames of a video sequence, where is the frame at time and is the space of all possible images. Tracking a single target object can be formulated as the estimation of the time series over a set of discrete time instants indexed by based on the information in. The vectors The time series are the states of the target and is also known as the trajectory of the target in The information encoded in the state 8 is the state space. depend on the application..
9 Problem Formulation object state 9
10 Problem Formulation feature extraction estimation of the target state over time may be mapped onto a feature (or observation) space that highlights information relevant to the tracking problem. The observation generated by a target is encoded in. The operations that are necessary to transform the image space observation space to the are referred to as feature extraction. Visual trackers propagate the information in the state over time using the extracted features. A localization strategy defines how to use the image features to produce an estimate of the target state 10.

11 Problem Formulation feature extraction 11 : space of all possible images : state space : feature or observation space : time index
12 Challenges 12
13 Challenges occlusion - clutter 13


14 Challenges change of appearance 14
15 Pipeline : video frames 15 : observations : object states
16 Techniques Visual tracking techniques can be characterized by the way the object is represented and the way the object is located Techniques Template Based Tracking NCC (Rigid) 16 Lucas-Kanade affine tracker Local Feature Based Tracking Lucas-Kanade optical flow Region Based Tracking CAMSHIFT Kernel Based


17 Template Based Tracking Objects are represented as image patches and located by maximizing some similarity measure between the template object and a series of candidates extracted from the current frame (template matching). target object where «w,h» are the template dimensions and «x,y» is the considered sub-image position within the frame. 17
 are the template dimensions is the sub-image (candidate) is the location of the sub-image 18 Similarity measures: Sum of Absolute Differences (SAD) Sum of")
18 Similarity Measures In order to measure the similarity degree between the target object and the candidates we need a similarity measure. Where: is the template (target object) are the template dimensions is the sub-image (candidate) is the location of the sub-image 18 Similarity measures: Sum of Absolute Differences (SAD) Sum of Squared Differences (SSD) Normalized Corss Correlation (NCC)
19 Similarity Measures sum of absolute differences (SAD) A perfect match corresponds to 0 SAD represents the norm between and. 19
20 Similarity Measures sum of squared differences (SSD) A perfect match corresponds to 0 SSD is the euclidean norm ( ) between and. 20
21 Similarity Measures normalized cross correlation (NCC) where and are the subimage and template image mean values respectively A perfect match corresponds to 1 The worst match corresponds to -1 (max decorrelation) NCC corresponds to the cosine angle between and 21
22 Similarity Measures NCC explained mean mean variance variance Fixed the point, let and vectors. The above product is: where is the be two 3d norm and product, a generalization of the dot product. For a property of the inner product, if being and are real vectors: the angle between the two vectors. only if equals multiplied by a positive scalar. i.e., invariance to linear lighting changes 22 is the inner


23 Template Matching similarity measure example Example of template matching using NCC as similarity measure The similarity function maximum position is the object location 23
24 Template Matching computational cost Number of operations = where: H and W are the dimensions of the frame. M and N are the dimensions of the template. The computational cost is proportional to the template and the frame dimensions. Possible Solutions: Multi-Resolution SubTemplate 24

25 Template Matching computational cost - improvements 1. Multi-Resolution: A low-resolution version of the template is first located in the lowest resolution image of the pyramids. This defines a search area in the next level where to search for a higher resolution template. At the last iteration the object is found in the original frame. 2. Sub-Template: First a sub-template search is performed on the entire image. Next, only on those areas with a high similarity score, a regular search is performed. 25
26 Template Matching limits Limits: The template representation is not invariant to rotation, scale and other transformations. So: The transformations have to be handled explicitly. Possible solution: Estimating the transformation parameters during the search (i.e., search for warped versions of the template). Lucas-Kanade registration algorithm 26
27 Techniques Techniques Template Based Tracking NCC (Rigid) 27 Lucas-Kanade affine tracker Local Feature Based Tracking Lucas-Kanade optical flow Region Based Tracking CAMSHIFT Kernel Based
28 Lucas-Kanade Registration Algorithm translational problem Image alignment consists of moving, and possibly deforming, a template to minimize the difference between the template and an input image. The translational image registration problem can be characterized as follows: we are given functions and which give the respective pixel values at each location in two images, where is a vector. We wish to find the disparity vector which minimizes some measure of the difference between and, for in some region of interest. estimate the 2 translation parameters 28
29 Lucas-Kanade Registration Algorithm general problem We want to search for an affine-transformed version of the template estimating the 6 parameters of the transformation matrix: estimate the 6 affine transformation parameters 29
30 Lucas-Kanade Registration Algorithm the warp function Let be the deformation function of the pixel using the vector parameters from the template coordinate system to the image one. The warp takes the pixel in the coordinate system of the template it to the sub-pixel location in the coordinate system of the image. The ( function can be a simple translation ( ). In the latter case In general the number of parameters arbitrarily complex. 30 ) or a 3D affine warp function is defined as: may be arbitrarily large and and maps can be
31 Lucas-Kanade Registration Algorithm goal The aim of the algorithm is to minimize the sum of squared errors (SSD) between the template and the image warped back onto the coordinate system of the template: (1) The minimization in (1) is performed with respect to the parameters vector sum is performed over all of the pixels of the template. and the To optimize the expression in equation (1), the Lucas-Kanade algorithm assumes that a current estimate of the vector is known and then iteratively solves for increments to the parameters ; i.e., the following expression is approximately minimized: (2) with respect to and then the parameters are updated: These two steps are iterated until the estimates of the parameters converge ( under a fixed threshold). The initial parameters estimate: is often used. is the iterative minimization process is based on the gradient descent 31
32 Lucas-Kanade Registration Algorithm derivation The equation (1) can be expressed using the Taylor series expansion stopping at the first degree: (3) where warp Jacobian: is the gradient of the image evaluated at and is the Calculating the derivative of the Taylor series expansion with respect to the parameter vector increment and equating to zero, we obtain: (4) where is the hessian defined as: (5) 32
33 Lucas-Kanade Registration Algorithm algorithm Iterate: 1 Warp with to compute 2 Compute the error image 3 Warp the gradient with 4 Evaluate the Jacobian at 5 Compute the steepest descent images 6 Compute the Hessian matrix using Equation (5) 7 Compute 8 Compute using Equation (4) 9 Update the parameters until 33 number of parameters number of pixels in Computational cost of each iteration:
34 Lucas-Kanade Registration Algorithm algorithm Input: Image Template Step 1 (image warp): warp using the current estimate of Target candidate Step 2 (error image): 34
: Image")

35 Lucas-Kanade Registration Algorithm algorithm Step 3 (gradient warp): Image gradient computation image gradient warped gradient warp using the current estimate of 35
36 Lucas-Kanade Registration Algorithm algorithm Step 4 (Jacobian): It represents all the partial derivatives of the warp function with respect to the parameters vector. Step 5 (steepest descent images): warped gradient the steepest descent images act as weights 36
37 Lucas-Kanade Registration Algorithm algorithm Step 6 (Hessian matrix): which corresponds to the second derivative of the Jacobian or also to the Jacobian of the gradient of the warp function. Step 7-8 (compute ): Hessian matrix weight function Step 9 (update the parameters): iterate until 37 error image

.")
38 Lucas Kanade Registration Algorithm pyramidal implementation In order to have better performance, a pyramidal approach can be used: First the algorithm estimate the motion vector at the highest level (less details), then the obtained values are used as starting point for the next level (more details). The height of the pyramid usually does not exceed 2-3 levels: less details more details 38
39 DEMO Template Matching 39
40 Techniques Techniques Template Based Tracking NCC (Rigid) 40 Lucas-Kanade affine tracker Local Feature Based Tracking Lucas-Kanade optical flow Region Based Tracking CAMSHIFT Kernel Based
 and located by estimating the keypoints locations over")
41 Local Feature Based Tracking Objects are represented as a set of feature points (keypoints or interest points) and located by estimating the keypoints locations over time. 41
42 Local Feature Based Tracking The points are tracked independently by estimating their motion vectors at each frame. This approach is referred to as sparse optical flow 42 42

43 Optical Flow Even impoverished motion data can evoke a strong percept G. Johansson, Visual Perception of Biological Motion and a Model For Its Analysis", Perception and Psychophysics 14, ,
44 Optical Flow Even impoverished motion data can evoke a strong percept G. Johansson, Visual Perception of Biological Motion and a Model For Its Analysis", Perception and Psychophysics 14, ,
 and the scene.")

45 Optical Flow definition Optical Flow is the pattern of apparent motion of objects, surfaces and edges in a visual scene caused by the relative motion between an observer (an eye or a camera) and the scene. Two types of motion: Movement in the scene with a static camera Movement of the camera Since motion is relative anyway, these types of motion should be the same. 45 However, this is not always the case, since if the scene moves relative to the illumination, shadow effects need to be dealt with.


46 Optical Flow motion field The motion field is the projection of the 3D scene motion into the image 46

47 Optical Flow motion field 47
48 Optical Flow usages Motion flow is useful for: 48 depth map, observer motion, image segmentation, object motion: establish relationship between object & viewer, guides smooth pursuit eye movement (saccades).
49 Optical Flow motion field and pallax X(t) is a moving 3D point Velocity of scene point: V = dx/dt x(t) = (x(t), y(t)) is the projection of X in the image Apparent velocity v in the image: given by components vx = dx/dt and vy = dy/dt These components are known as the motion field of the image X(t) X(t+dt) V v x(t) x(t+dt)
50 Optical Flow aperture problem Generally, optical flow corresponds to the motion field, but not always. For example, the motion field and the optical flow of a rotating barber's pole are different. In general, such cases are unusual.

51 Optical Flow aperture problem
52 Optical Flow aperture problem Perceived motion
53 Optical Flow aperture problem Actual motion
54 Optical Flow aperture problem
55 Optical Flow aperture problem
56 Optical Flow aperture problem Each neuron in the visual system is sensitive to visual input in a small part of the visual field, as if each neuron is looking at the visual field through a small window or aperture. The motion direction of a contour is ambiguous, because the motion component parallel to the line cannot be inferred based on the visual input. This means that a variety of contours of different orientations moving at different speeds can cause identical responses in a motion sensitive neuron in the visual system.
57 Optical Flow formulation In order to track a key-point, the brightness constancy assumption is usually considered. It states that the key-points can change their position but they keep approximately the same pixel value in two subsequent frames. This means that changes in image intensity are about entirely due to motion and not to lighting changes in the scene. Given two subsequent frames respectively taken at times and in order to compute the key-point motion vector, the image constraint equation is formulated using the brightness constancy assumption: (1) Expanding the right hand side with Taylor series: (2) Using equation (1) we get: (3) 57
58 Optical Flow formulation So we get: (4) Where and are the components of the velocity of the point with coordinates,, and are the partial derivatives of with respect to, and. So we have: while (5) which is the motion constraint equation. Considering that the spatial and temporal derivatives can be computed, the Equation (5) has two unknowns ( and ) and can not be solved. So, in order to find the optical flow, additional equation have to be added. This is done by making some additional assumption. Each optical flow algorithm add its own assumption (i.e., equations). 58
59 Techniques Techniques Template Based Tracking NCC (Rigid) 59 Lucas-Kanade affine tracker Local Feature Based Tracking Lucas-Kanade optical flow Region Based Tracking CAMSHIFT Kernel Based
60 Lucas-Kanade Optical Flow assumptions Brightness Constancy: the key-points can change their position but they keep approximately the same pixel value in two subsequent frames. Spatial Coherence: neighborhood points belong to the same surface and so they share the same velocity Temporal Persistence: the movements of an object in the scene are very slow. This means that the temporal increments are faster than object movements assumption 2 allows us to apply the L-K algorithm to an image patch surrounding the key-point 60
61 Lucas-Kanade Optical Flow formulation The motion constraint equation (5) can be written as: (6) where Given the key-point, a window containing neighbor pixels and the following equations are obtained from (6): is considered We can write the system as: (7) 61
62 Lucas-Kanade Optical Flow formulation where: The equation (7) represents an over-determined system which can be solved with the least squares as follows: The optical flow (i.e., the motion vector) is finally computed as: structure tensor 62
63 Lucas-Kanade Optical Flow good features to track Not all parts of an image contain motion information. Similarly, along a straight edge, we can only determine the motion component orthogonal to the edge. In order to overcame this problem, generally the feature point is chosen in a high texture area of the image (e.g., a corner) avoiding to select it from a uniform area. Looking at the equation (7) we can retrieve some information about the selected feature. Specifically the coefficients matrix must be both above the image noise and wellconditioned. Let and be the eigenvalues of. Two small values would determine an almost constant intensity in the selected patch (a uniform area), white two large eigenvalues can represent corners or high texture areas. In practice when the eigenvalues are large enough to avoid the noise, the corresponding matrix is well-conditioned. So we impose: where is a predefined threshold. like in the Harris corner detector 63
64 DEMO Lucas-Kanade Optical Flow 64
65 Techniques Techniques Template Based Tracking NCC (Rigid) 65 Lucas-Kanade affine tracker Local Feature Based Tracking Lucas-Kanade optical flow Region Based Tracking CAMSHIFT Kernel Based

66 Region Based Tracking Objects are represented as probability distributions describing their region of appearance in some feature space and located by finding the region whose probability distribution is the closest to the object one according to some similarity measure. feature space: hue colors 66
.")
67 Region Based Tracking feature space The feature space must be chosen in order to maximize the separation between the object description and the background description. In this case the object is represented as a color distribution (histogram). The selected feature space is such that the object representation (color distribution) is different enough from the background one. Many possible feature spaces: Color Intensity (grayscale) Edge orientations... 67
68 The MeanShift Procedure Mean shift is an iterative procedure for locating the maxima of a density function (the distribution mode) given discrete data sampled from that function. It is a hill climbing technique which locally searches for the best path to reach the mode (the hilltop) of the distribution. Algorithm description: 1.Choose a search window size 2.Choose the initial location of the search window 3.Compute the mean location in the search window 4.Center the search window at the mean location computed in step 3 5.Repeat steps 3 and 4 until convergence (until the mean location moves less that a fixed threshold) 68
69 Gradient-based optimization: Intuitive description Region of interest Center of mass Mean Shift vector Objective : Find the densest region
70 Gradient-based optimization: Intuitive description Region of interest Center of mass Mean Shift vector Objective : Find the densest region
71 Gradient-based optimization: Intuitive description Region of interest Center of mass Mean Shift vector Objective : Find the densest region
72 Gradient-based optimization: Intuitive description Region of interest Center of mass Objective : Find the densest region
73 Techniques Techniques Template Based Tracking NCC (Rigid) 73 Lucas-Kanade affine tracker Local Feature Based Tracking Lucas-Kanade optical flow Region Based Tracking CAMSHIFT Kernel Based
74 CAMSHIFT definitions The base idea behind the CAMSHIFT algorithm is to use the MeanShift procedure in order to find the mode of a probability image representing the probability to find the object at each frame position. In order to build a probability image out of the current frame, the target object is first represented in the chosen feature space as a quantized probability density function. Let be the quantized probability function representing the object and let the function associate to the pixel the index of its bin in the quantized feature space. The probability image is defined as: 74

75 CAMSHIFT algorithm illustration target object probability image template model input frame 75
76 CAMSHIFT dealing with scale Continuously Adaptive Mean Shift Since the probability distributions derived from video sequences are not static (due to the object change of location and scale, and adaptive version of the MeanShift procedure is used. Specifically the MeanShift search window scale is updated during the search process. The localization process (both the search and the window size update) are performed calculating the following quantities at each step: (zeroth moment) where is the probability image while and range over the current search window. The new location is computed as: while the window size is set to a function of the zeroth moment. the zeroth moment is the distribution area found under the search window 76
77 CAMSHIFT summary 1. Chose the initial size and location of the search window 2. Compute the zeroth moment and the moments within the current search window 3. Set the new window position to (MeanShift procedure) and update the window size to a function of the zeroth moment 4. Repeat steps 2 and 3 until convergence (until 77 )
78 DEMO CAMSHIFT 78
79 Techniques Techniques Template Based Tracking NCC (Rigid) 79 Lucas-Kanade affine tracker Local Feature Based Tracking Lucas-Kanade optical flow Region Based Tracking CAMSHIFT Kernel Based
80 Kernel Based Object Tracking The base idea is to use the MeanShift procedure to find the nearest peak of the similarity measure between the target area representation (probability distribution) and the candidate area one. In order to regularize the similarity function an isotropic kernel in the spatial domain is used in order to obtain a smooth similarity function (suitable for gradient-based optimizations). The representation of the region containing the object is called target model, whereas the representation of a region in the frame where the object is searched is called target candidate. 80
81 Kernel Based Object Tracking Overview Requirements: Real-time Robustness ρ[ 1 2 m target model, 1 2 m ] target candidate New target model 1) Detect the object (target model) in the current frame 2) Represent the target model by its PDF in the feature space (e.g. quantized color space) 3) Start from the position of the target model in the next frame 4) Search in the neighborhood the best target candidate by maximizing a similarity function 5) Repeat the same process in the next pair of frames

82 Gradient-Based Optimization 1 2 Target Model Target Candidate (centered at 0) (centered at y) m 1 2 Similarity Function m The similarity function plays the role of a likelihood and its local maxima in the image indicate the presence of objects in the second frame having representations similar to the target model defined in the first frame. If only spectral information is used to characterize the target, the similarity function can have large variations for adjacent locations on the image lattice and the spatial information is lost. To find the maxima of such functions, gradient-based optimization procedures are difficult to apply and only an expensive exhaustive search can be used. To regularize the similarity function an isotropic kernel in the spatial domain can be used. When the kernel weights, carrying continuous spatial information, are used in defining the feature space representations, the similarity function becomes a smooth function.
83 Kernel Based Object Tracking target representation Chosen a feature space, the target is represented as a probability density function (pdf) Without loss of generality the object is considered as centered at location.. In the subsequent frame a target candidate is defined at location and is characterized by its pdf. The pdfs are estimated from the data in the form of discrete densities, i.e., m-bins normalized histogram. So we have: The similarity function between and is denoted by: The function plays the role of a likelihood and its local maxima represent the presence of an object in the frame having representation similar to defined in the first frame. This kind of similarity function can have large variations for adjacent positions, making gradient optimizations (i.e., MeanShift) difficult to apply. The similarity function is regularized (smoothed) by masking the objects with an isotropic kernel in the spatial domain. 83
84 Kernel Based Object Tracking isotropic kernel A target is represented as an ellipsoidal region in the image. To eliminate the influence of different target dimensions, each target is first normalized to the unit circle. Target Model Target Candidate (1) where is the Kronecker function and to the pixel and (2) associates the index of its bin in the quantized feature space. are derived from the normalization conditions and. is the profile of the isotropic kernel used to assign smaller weights to the pixels further from the center. is the bandwidth, a parameter related to the candidate scale. 84
85 Kernel Based Object Tracking similarity measure In order to compare two discrete pdfs, a metric derived from the Bhattacharya coefficient is used. The distance between two discrete distributions is defined as: (3) where it is chosen: this is the function we want to maximize with respect to y (4) similarity function smoothness The similarity function (4) inherits the properties of the kernel profile when the target model and the target candidate are represented according to (1) and (2). A differentiable kernel profile yields a differentiable similarity function and efficient gradient-based optimizations procedures can be used to find the maxima (or equivalently the minima of (3)). The presence of the continuous kernel introduces an interpolation process between the locations of the image lattice. 85
86 Kernel Based Object Tracking distance minimization Minimizing (3) is equivalent to maximizing (4). Using Taylor expansions around the values the linear approximation of the Bhattacharyya coefficient (4) is obtained after some manipulations as: (5) where (6) which is verified when the target candidate does not change drastically from the initial, which is most often a valid assumption between consecutive frames. The condition can be enforced by not using the feature values in violation. The MeanShift procedure is so applied moving iteratively the current location location according to the relation: to the new (7) where 86

87 Kernel Based Object Tracking Epanechnikov kernel The Epanechnikov kernel profile is defined as follows: where is the dimension of the space which the points belong to and the d-dimensional unit sphere. In our case: and. Since the derivative of the Epanechnikov profile is constant, (7) reduces to: (7) 87 is the volume of (8)
88 Kernel Based Object Tracking algorithm 1. Initialize the location of the target in the current frame with histogram using where is the Epanechnikov kernel profile. 2. Compute the weights using: 3. Find the next location of the target candidate using: 4. If 88 stop. Otherwise set and go to step 2., compute the
89 Kernel Based Object Tracking adaptive scale During the tracking, the target object scale can change as it come closer or go further from the camera. In order to deal with the scale change, we act on the bandwidth ( ) parameter: values determine smaller values and so less pixels are taken into account when the representation of the target candidate is computed, that corresponds to actually searching for the object at a smaller scale. Similarly, using values, correspond to searching for the object at a bigger scale So in order to deal with scale, the object can be searched using three bandwidth values: where is the previous bandwidth parameter and is a predefined increment value. The bandwidth value yielding the best Bhattacharyya result is denoted by. To avoid over-sensitive scale adaptation, the bandwidth associated width the current frame is obtained through filtering: where 89 by default.
90 DEMO MEANSHIFT 90
91 References [1] Lucas, B. D., & Kanade, T. (1981). An Iterative Image Registration Technique with an Application to Stereo Vision. (Array, Ed.)Imaging, 130(x), [2] Baker, S., Gross, R., Ishikawa, T., & Matthews, I. (n.d.). Lucas-Kanade 20 Years On : A Unifying Framework : Part 2 1 Introduction. [3] Tomasi, C., & Kanade, T. (1991). Detection and Tracking of Point Features Technical Report CMU-CS , (April). [4] Comaniciu, D., Meer, P., & Member, S. (2002). Mean Shift : A Robust Approach Toward Feature Space Analysis, 24(5), [5] Bradski, G. R. (1998). Computer Vision Face Tracking For Use in a Perceptual User Interface. Interface, 2(2), [6] Comaniciu, D., Ramesh, V., & Meer, P. (2003). Kernel-based object tracking. (V. Ramesh & P. Meer, Eds.)IEEE Transactions on Pattern Analysis and Machine Intelligence, 25(5),
Visual Tracking. Antonino Furnari. Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania
 Visual Tracking Antonino Furnari Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania furnari@dmi.unict.it 11 giugno 2015 What is visual tracking? estimation
Visual Tracking Antonino Furnari Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania furnari@dmi.unict.it 11 giugno 2015 What is visual tracking? estimation
Peripheral drift illusion
 Peripheral drift illusion Does it work on other animals? Computer Vision Motion and Optical Flow Many slides adapted from J. Hays, S. Seitz, R. Szeliski, M. Pollefeys, K. Grauman and others Video A video
Peripheral drift illusion Does it work on other animals? Computer Vision Motion and Optical Flow Many slides adapted from J. Hays, S. Seitz, R. Szeliski, M. Pollefeys, K. Grauman and others Video A video
Motion and Optical Flow. Slides from Ce Liu, Steve Seitz, Larry Zitnick, Ali Farhadi
 Motion and Optical Flow Slides from Ce Liu, Steve Seitz, Larry Zitnick, Ali Farhadi We live in a moving world Perceiving, understanding and predicting motion is an important part of our daily lives Motion
Motion and Optical Flow Slides from Ce Liu, Steve Seitz, Larry Zitnick, Ali Farhadi We live in a moving world Perceiving, understanding and predicting motion is an important part of our daily lives Motion
Visual motion. Many slides adapted from S. Seitz, R. Szeliski, M. Pollefeys
 Visual motion Man slides adapted from S. Seitz, R. Szeliski, M. Pollefes Motion and perceptual organization Sometimes, motion is the onl cue Motion and perceptual organization Sometimes, motion is the
Visual motion Man slides adapted from S. Seitz, R. Szeliski, M. Pollefes Motion and perceptual organization Sometimes, motion is the onl cue Motion and perceptual organization Sometimes, motion is the
Tracking Computer Vision Spring 2018, Lecture 24
 Tracking http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 24 Course announcements Homework 6 has been posted and is due on April 20 th. - Any questions about the homework? - How
Tracking http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 24 Course announcements Homework 6 has been posted and is due on April 20 th. - Any questions about the homework? - How
Computer Vision II Lecture 4
 Computer Vision II Lecture 4 Color based Tracking 29.04.2014 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Course Outline Single-Object Tracking Background modeling
Computer Vision II Lecture 4 Color based Tracking 29.04.2014 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Course Outline Single-Object Tracking Background modeling
CS 4495 Computer Vision Motion and Optic Flow
 CS 4495 Computer Vision Aaron Bobick School of Interactive Computing Administrivia PS4 is out, due Sunday Oct 27 th. All relevant lectures posted Details about Problem Set: You may *not* use built in Harris
CS 4495 Computer Vision Aaron Bobick School of Interactive Computing Administrivia PS4 is out, due Sunday Oct 27 th. All relevant lectures posted Details about Problem Set: You may *not* use built in Harris
Comparison between Motion Analysis and Stereo
 MOTION ESTIMATION The slides are from several sources through James Hays (Brown); Silvio Savarese (U. of Michigan); Octavia Camps (Northeastern); including their own slides. Comparison between Motion Analysis
MOTION ESTIMATION The slides are from several sources through James Hays (Brown); Silvio Savarese (U. of Michigan); Octavia Camps (Northeastern); including their own slides. Comparison between Motion Analysis
Feature Tracking and Optical Flow
 Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who 1 in turn adapted slides from Steve Seitz, Rick Szeliski,
Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who 1 in turn adapted slides from Steve Seitz, Rick Szeliski,
COMPUTER VISION > OPTICAL FLOW UTRECHT UNIVERSITY RONALD POPPE
 COMPUTER VISION 2017-2018 > OPTICAL FLOW UTRECHT UNIVERSITY RONALD POPPE OUTLINE Optical flow Lucas-Kanade Horn-Schunck Applications of optical flow Optical flow tracking Histograms of oriented flow Assignment
COMPUTER VISION 2017-2018 > OPTICAL FLOW UTRECHT UNIVERSITY RONALD POPPE OUTLINE Optical flow Lucas-Kanade Horn-Schunck Applications of optical flow Optical flow tracking Histograms of oriented flow Assignment
Feature Tracking and Optical Flow
 Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who in turn adapted slides from Steve Seitz, Rick Szeliski,
Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who in turn adapted slides from Steve Seitz, Rick Szeliski,
Visual Tracking (1) Tracking of Feature Points and Planar Rigid Objects
 Tracking of Feature Points and Planar Rigid Objects") Intelligent Control Systems Visual Tracking (1) Tracking of Feature Points and Planar Rigid Objects Shingo Kagami Graduate School of Information Sciences, Tohoku University swk(at)ic.is.tohoku.ac.jp http://www.ic.is.tohoku.ac.jp/ja/swk/
Intelligent Control Systems Visual Tracking (1) Tracking of Feature Points and Planar Rigid Objects Shingo Kagami Graduate School of Information Sciences, Tohoku University swk(at)ic.is.tohoku.ac.jp http://www.ic.is.tohoku.ac.jp/ja/swk/
Multi-stable Perception. Necker Cube
 Multi-stable Perception Necker Cube Spinning dancer illusion, Nobuyuki Kayahara Multiple view geometry Stereo vision Epipolar geometry Lowe Hartley and Zisserman Depth map extraction Essential matrix
Multi-stable Perception Necker Cube Spinning dancer illusion, Nobuyuki Kayahara Multiple view geometry Stereo vision Epipolar geometry Lowe Hartley and Zisserman Depth map extraction Essential matrix
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
Computer Vision Lecture 20
 Computer Perceptual Vision and Sensory WS 16/17 Augmented Computing Computer Perceptual Vision and Sensory WS 16/17 Augmented Computing Computer Perceptual Vision and Sensory WS 16/17 Augmented Computing
Computer Perceptual Vision and Sensory WS 16/17 Augmented Computing Computer Perceptual Vision and Sensory WS 16/17 Augmented Computing Computer Perceptual Vision and Sensory WS 16/17 Augmented Computing
Computer Vision Lecture 20
 Computer Perceptual Vision and Sensory WS 16/76 Augmented Computing Many slides adapted from K. Grauman, S. Seitz, R. Szeliski, M. Pollefeys, S. Lazebnik Computer Vision Lecture 20 Motion and Optical Flow
Computer Perceptual Vision and Sensory WS 16/76 Augmented Computing Many slides adapted from K. Grauman, S. Seitz, R. Szeliski, M. Pollefeys, S. Lazebnik Computer Vision Lecture 20 Motion and Optical Flow
Computer Vision II Lecture 4
 Course Outline Computer Vision II Lecture 4 Single-Object Tracking Background modeling Template based tracking Color based Tracking Color based tracking Contour based tracking Tracking by online classification
Course Outline Computer Vision II Lecture 4 Single-Object Tracking Background modeling Template based tracking Color based Tracking Color based tracking Contour based tracking Tracking by online classification
EE 264: Image Processing and Reconstruction. Image Motion Estimation I. EE 264: Image Processing and Reconstruction. Outline
 1 Image Motion Estimation I 2 Outline 1. Introduction to Motion 2. Why Estimate Motion? 3. Global vs. Local Motion 4. Block Motion Estimation 5. Optical Flow Estimation Basics 6. Optical Flow Estimation
1 Image Motion Estimation I 2 Outline 1. Introduction to Motion 2. Why Estimate Motion? 3. Global vs. Local Motion 4. Block Motion Estimation 5. Optical Flow Estimation Basics 6. Optical Flow Estimation
Visual Tracking (1) Pixel-intensity-based methods
 Pixel-intensity-based methods") Intelligent Control Systems Visual Tracking (1) Pixel-intensity-based methods Shingo Kagami Graduate School of Information Sciences, Tohoku University swk(at)ic.is.tohoku.ac.jp http://www.ic.is.tohoku.ac.jp/ja/swk/
Intelligent Control Systems Visual Tracking (1) Pixel-intensity-based methods Shingo Kagami Graduate School of Information Sciences, Tohoku University swk(at)ic.is.tohoku.ac.jp http://www.ic.is.tohoku.ac.jp/ja/swk/
Finally: Motion and tracking. Motion 4/20/2011. CS 376 Lecture 24 Motion 1. Video. Uses of motion. Motion parallax. Motion field
 Finally: Motion and tracking Tracking objects, video analysis, low level motion Motion Wed, April 20 Kristen Grauman UT-Austin Many slides adapted from S. Seitz, R. Szeliski, M. Pollefeys, and S. Lazebnik
Finally: Motion and tracking Tracking objects, video analysis, low level motion Motion Wed, April 20 Kristen Grauman UT-Austin Many slides adapted from S. Seitz, R. Szeliski, M. Pollefeys, and S. Lazebnik
Motion and Tracking. Andrea Torsello DAIS Università Ca Foscari via Torino 155, Mestre (VE)
") Motion and Tracking Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Motion Segmentation Segment the video into multiple coherently moving objects Motion and Perceptual Organization
Motion and Tracking Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Motion Segmentation Segment the video into multiple coherently moving objects Motion and Perceptual Organization
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014
 SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
Lecture 16: Computer Vision
 CS4442/9542b: Artificial Intelligence II Prof. Olga Veksler Lecture 16: Computer Vision Motion Slides are from Steve Seitz (UW), David Jacobs (UMD) Outline Motion Estimation Motion Field Optical Flow Field
CS4442/9542b: Artificial Intelligence II Prof. Olga Veksler Lecture 16: Computer Vision Motion Slides are from Steve Seitz (UW), David Jacobs (UMD) Outline Motion Estimation Motion Field Optical Flow Field
Motion Estimation. There are three main types (or applications) of motion estimation:
 of motion estimation:") Members: D91922016 朱威達 R93922010 林聖凱 R93922044 謝俊瑋 Motion Estimation There are three main types (or applications) of motion estimation: Parametric motion (image alignment) The main idea of parametric motion
Members: D91922016 朱威達 R93922010 林聖凱 R93922044 謝俊瑋 Motion Estimation There are three main types (or applications) of motion estimation: Parametric motion (image alignment) The main idea of parametric motion
Ninio, J. and Stevens, K. A. (2000) Variations on the Hermann grid: an extinction illusion. Perception, 29,
 Variations on the Hermann grid: an extinction illusion. Perception, 29,") Ninio, J. and Stevens, K. A. (2000) Variations on the Hermann grid: an extinction illusion. Perception, 29, 1209-1217. CS 4495 Computer Vision A. Bobick Sparse to Dense Correspodence Building Rome in
Ninio, J. and Stevens, K. A. (2000) Variations on the Hermann grid: an extinction illusion. Perception, 29, 1209-1217. CS 4495 Computer Vision A. Bobick Sparse to Dense Correspodence Building Rome in
ECE Digital Image Processing and Introduction to Computer Vision
 ECE592-064 Digital Image Processing and Introduction to Computer Vision Depart. of ECE, NC State University Instructor: Tianfu (Matt) Wu Spring 2017 Recap, SIFT Motion Tracking Change Detection Feature
ECE592-064 Digital Image Processing and Introduction to Computer Vision Depart. of ECE, NC State University Instructor: Tianfu (Matt) Wu Spring 2017 Recap, SIFT Motion Tracking Change Detection Feature
Visual Tracking (1) Feature Point Tracking and Block Matching
 Feature Point Tracking and Block Matching") Intelligent Control Systems Visual Tracking (1) Feature Point Tracking and Block Matching Shingo Kagami Graduate School of Information Sciences, Tohoku University swk(at)ic.is.tohoku.ac.jp http://www.ic.is.tohoku.ac.jp/ja/swk/
Intelligent Control Systems Visual Tracking (1) Feature Point Tracking and Block Matching Shingo Kagami Graduate School of Information Sciences, Tohoku University swk(at)ic.is.tohoku.ac.jp http://www.ic.is.tohoku.ac.jp/ja/swk/
Lecture 16: Computer Vision
 CS442/542b: Artificial ntelligence Prof. Olga Veksler Lecture 16: Computer Vision Motion Slides are from Steve Seitz (UW), David Jacobs (UMD) Outline Motion Estimation Motion Field Optical Flow Field Methods
CS442/542b: Artificial ntelligence Prof. Olga Veksler Lecture 16: Computer Vision Motion Slides are from Steve Seitz (UW), David Jacobs (UMD) Outline Motion Estimation Motion Field Optical Flow Field Methods
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS
 SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 11 140311 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Motion Analysis Motivation Differential Motion Optical
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 11 140311 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Motion Analysis Motivation Differential Motion Optical
Augmented Reality VU. Computer Vision 3D Registration (2) Prof. Vincent Lepetit
 Prof. Vincent Lepetit") Augmented Reality VU Computer Vision 3D Registration (2) Prof. Vincent Lepetit Feature Point-Based 3D Tracking Feature Points for 3D Tracking Much less ambiguous than edges; Point-to-point reprojection
Augmented Reality VU Computer Vision 3D Registration (2) Prof. Vincent Lepetit Feature Point-Based 3D Tracking Feature Points for 3D Tracking Much less ambiguous than edges; Point-to-point reprojection
Dense Image-based Motion Estimation Algorithms & Optical Flow
 Dense mage-based Motion Estimation Algorithms & Optical Flow Video A video is a sequence of frames captured at different times The video data is a function of v time (t) v space (x,y) ntroduction to motion
Dense mage-based Motion Estimation Algorithms & Optical Flow Video A video is a sequence of frames captured at different times The video data is a function of v time (t) v space (x,y) ntroduction to motion
BSB663 Image Processing Pinar Duygulu. Slides are adapted from Selim Aksoy
 BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
CS201: Computer Vision Introduction to Tracking
 CS201: Computer Vision Introduction to Tracking John Magee 18 November 2014 Slides courtesy of: Diane H. Theriault Question of the Day How can we represent and use motion in images? 1 What is Motion? Change
CS201: Computer Vision Introduction to Tracking John Magee 18 November 2014 Slides courtesy of: Diane H. Theriault Question of the Day How can we represent and use motion in images? 1 What is Motion? Change
Robert Collins CSE598G. Intro to Template Matching and the Lucas-Kanade Method
 Intro to Template Matching and the Lucas-Kanade Method Appearance-Based Tracking current frame + previous location likelihood over object location current location appearance model (e.g. image template,
Intro to Template Matching and the Lucas-Kanade Method Appearance-Based Tracking current frame + previous location likelihood over object location current location appearance model (e.g. image template,
Eppur si muove ( And yet it moves )
") Eppur si muove ( And yet it moves ) - Galileo Galilei University of Texas at Arlington Tracking of Image Features CSE 4392-5369 Vision-based Robot Sensing, Localization and Control Dr. Gian Luca Mariottini,
Eppur si muove ( And yet it moves ) - Galileo Galilei University of Texas at Arlington Tracking of Image Features CSE 4392-5369 Vision-based Robot Sensing, Localization and Control Dr. Gian Luca Mariottini,
Outline 7/2/201011/6/
 Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
The Lucas & Kanade Algorithm
 The Lucas & Kanade Algorithm Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Registration, Registration, Registration. Linearizing Registration. Lucas & Kanade Algorithm. 3 Biggest
The Lucas & Kanade Algorithm Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Registration, Registration, Registration. Linearizing Registration. Lucas & Kanade Algorithm. 3 Biggest
Local Feature Detectors
 Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation
 Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
Optical flow and tracking
 EECS 442 Computer vision Optical flow and tracking Intro Optical flow and feature tracking Lucas-Kanade algorithm Motion segmentation Segments of this lectures are courtesy of Profs S. Lazebnik S. Seitz,
EECS 442 Computer vision Optical flow and tracking Intro Optical flow and feature tracking Lucas-Kanade algorithm Motion segmentation Segments of this lectures are courtesy of Profs S. Lazebnik S. Seitz,
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 19: Optical flow http://en.wikipedia.org/wiki/barberpole_illusion Readings Szeliski, Chapter 8.4-8.5 Announcements Project 2b due Tuesday, Nov 2 Please sign
CS6670: Computer Vision Noah Snavely Lecture 19: Optical flow http://en.wikipedia.org/wiki/barberpole_illusion Readings Szeliski, Chapter 8.4-8.5 Announcements Project 2b due Tuesday, Nov 2 Please sign
Autonomous Navigation for Flying Robots
 Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 7.1: 2D Motion Estimation in Images Jürgen Sturm Technische Universität München 3D to 2D Perspective Projections
Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 7.1: 2D Motion Estimation in Images Jürgen Sturm Technische Universität München 3D to 2D Perspective Projections
VC 11/12 T11 Optical Flow
 VC 11/12 T11 Optical Flow Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Miguel Tavares Coimbra Outline Optical Flow Constraint Equation Aperture
VC 11/12 T11 Optical Flow Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Miguel Tavares Coimbra Outline Optical Flow Constraint Equation Aperture
Local Features: Detection, Description & Matching
 Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
Matching. Compare region of image to region of image. Today, simplest kind of matching. Intensities similar.
 Matching Compare region of image to region of image. We talked about this for stereo. Important for motion. Epipolar constraint unknown. But motion small. Recognition Find object in image. Recognize object.
Matching Compare region of image to region of image. We talked about this for stereo. Important for motion. Epipolar constraint unknown. But motion small. Recognition Find object in image. Recognize object.
EECS 556 Image Processing W 09
 EECS 556 Image Processing W 09 Motion estimation Global vs. Local Motion Block Motion Estimation Optical Flow Estimation (normal equation) Man slides of this lecture are courtes of prof Milanfar (UCSC)
EECS 556 Image Processing W 09 Motion estimation Global vs. Local Motion Block Motion Estimation Optical Flow Estimation (normal equation) Man slides of this lecture are courtes of prof Milanfar (UCSC)
Fundamental matrix. Let p be a point in left image, p in right image. Epipolar relation. Epipolar mapping described by a 3x3 matrix F
 Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix F Fundamental
Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix F Fundamental
CAP 5415 Computer Vision Fall 2012
 CAP 5415 Computer Vision Fall 01 Dr. Mubarak Shah Univ. of Central Florida Office 47-F HEC Lecture-5 SIFT: David Lowe, UBC SIFT - Key Point Extraction Stands for scale invariant feature transform Patented
CAP 5415 Computer Vision Fall 01 Dr. Mubarak Shah Univ. of Central Florida Office 47-F HEC Lecture-5 SIFT: David Lowe, UBC SIFT - Key Point Extraction Stands for scale invariant feature transform Patented
Scale Invariant Feature Transform
 Why do we care about matching features? Scale Invariant Feature Transform Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Automatic
Why do we care about matching features? Scale Invariant Feature Transform Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Automatic
Kanade Lucas Tomasi Tracking (KLT tracker)
") Kanade Lucas Tomasi Tracking (KLT tracker) Tomáš Svoboda, svoboda@cmp.felk.cvut.cz Czech Technical University in Prague, Center for Machine Perception http://cmp.felk.cvut.cz Last update: November 26,
Kanade Lucas Tomasi Tracking (KLT tracker) Tomáš Svoboda, svoboda@cmp.felk.cvut.cz Czech Technical University in Prague, Center for Machine Perception http://cmp.felk.cvut.cz Last update: November 26,
Scale Invariant Feature Transform
 Scale Invariant Feature Transform Why do we care about matching features? Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Image
Scale Invariant Feature Transform Why do we care about matching features? Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Image
Segmentation and Tracking of Partial Planar Templates
 Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Tracking in image sequences
 CENTER FOR MACHINE PERCEPTION CZECH TECHNICAL UNIVERSITY Tracking in image sequences Lecture notes for the course Computer Vision Methods Tomáš Svoboda svobodat@fel.cvut.cz March 23, 2011 Lecture notes
CENTER FOR MACHINE PERCEPTION CZECH TECHNICAL UNIVERSITY Tracking in image sequences Lecture notes for the course Computer Vision Methods Tomáš Svoboda svobodat@fel.cvut.cz March 23, 2011 Lecture notes
Overview. Video. Overview 4/7/2008. Optical flow. Why estimate motion? Motion estimation: Optical flow. Motion Magnification Colorization.
 Overview Video Optical flow Motion Magnification Colorization Lecture 9 Optical flow Motion Magnification Colorization Overview Optical flow Combination of slides from Rick Szeliski, Steve Seitz, Alyosha
Overview Video Optical flow Motion Magnification Colorization Lecture 9 Optical flow Motion Magnification Colorization Overview Optical flow Combination of slides from Rick Szeliski, Steve Seitz, Alyosha
Motion. 1 Introduction. 2 Optical Flow. Sohaib A Khan. 2.1 Brightness Constancy Equation
 Motion Sohaib A Khan 1 Introduction So far, we have dealing with single images of a static scene taken by a fixed camera. Here we will deal with sequence of images taken at different time intervals. Motion
Motion Sohaib A Khan 1 Introduction So far, we have dealing with single images of a static scene taken by a fixed camera. Here we will deal with sequence of images taken at different time intervals. Motion
Mean Shift Tracking. CS4243 Computer Vision and Pattern Recognition. Leow Wee Kheng
 CS4243 Computer Vision and Pattern Recognition Leow Wee Kheng Department of Computer Science School of Computing National University of Singapore (CS4243) Mean Shift Tracking 1 / 28 Mean Shift Mean Shift
CS4243 Computer Vision and Pattern Recognition Leow Wee Kheng Department of Computer Science School of Computing National University of Singapore (CS4243) Mean Shift Tracking 1 / 28 Mean Shift Mean Shift
Spatial track: motion modeling
 Spatial track: motion modeling Virginio Cantoni Computer Vision and Multimedia Lab Università di Pavia Via A. Ferrata 1, 27100 Pavia virginio.cantoni@unipv.it http://vision.unipv.it/va 1 Comparison between
Spatial track: motion modeling Virginio Cantoni Computer Vision and Multimedia Lab Università di Pavia Via A. Ferrata 1, 27100 Pavia virginio.cantoni@unipv.it http://vision.unipv.it/va 1 Comparison between
Using Subspace Constraints to Improve Feature Tracking Presented by Bryan Poling. Based on work by Bryan Poling, Gilad Lerman, and Arthur Szlam
 Presented by Based on work by, Gilad Lerman, and Arthur Szlam What is Tracking? Broad Definition Tracking, or Object tracking, is a general term for following some thing through multiple frames of a video
Presented by Based on work by, Gilad Lerman, and Arthur Szlam What is Tracking? Broad Definition Tracking, or Object tracking, is a general term for following some thing through multiple frames of a video
The SIFT (Scale Invariant Feature
 The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
CS 565 Computer Vision. Nazar Khan PUCIT Lectures 15 and 16: Optic Flow
 CS 565 Computer Vision Nazar Khan PUCIT Lectures 15 and 16: Optic Flow Introduction Basic Problem given: image sequence f(x, y, z), where (x, y) specifies the location and z denotes time wanted: displacement
CS 565 Computer Vision Nazar Khan PUCIT Lectures 15 and 16: Optic Flow Introduction Basic Problem given: image sequence f(x, y, z), where (x, y) specifies the location and z denotes time wanted: displacement
Ruch (Motion) Rozpoznawanie Obrazów Krzysztof Krawiec Instytut Informatyki, Politechnika Poznańska. Krzysztof Krawiec IDSS
 Rozpoznawanie Obrazów Krzysztof Krawiec Instytut Informatyki, Politechnika Poznańska. Krzysztof Krawiec IDSS") Ruch (Motion) Rozpoznawanie Obrazów Krzysztof Krawiec Instytut Informatyki, Politechnika Poznańska 1 Krzysztof Krawiec IDSS 2 The importance of visual motion Adds entirely new (temporal) dimension to visual
Ruch (Motion) Rozpoznawanie Obrazów Krzysztof Krawiec Instytut Informatyki, Politechnika Poznańska 1 Krzysztof Krawiec IDSS 2 The importance of visual motion Adds entirely new (temporal) dimension to visual
SE 263 R. Venkatesh Babu. Object Tracking. R. Venkatesh Babu
 Object Tracking R. Venkatesh Babu Primitive tracking Appearance based - Template Matching Assumptions: Object description derived from first frame No change in object appearance Movement only 2D translation
Object Tracking R. Venkatesh Babu Primitive tracking Appearance based - Template Matching Assumptions: Object description derived from first frame No change in object appearance Movement only 2D translation
Computational Optical Imaging - Optique Numerique. -- Single and Multiple View Geometry, Stereo matching --
 Computational Optical Imaging - Optique Numerique -- Single and Multiple View Geometry, Stereo matching -- Autumn 2015 Ivo Ihrke with slides by Thorsten Thormaehlen Reminder: Feature Detection and Matching
Computational Optical Imaging - Optique Numerique -- Single and Multiple View Geometry, Stereo matching -- Autumn 2015 Ivo Ihrke with slides by Thorsten Thormaehlen Reminder: Feature Detection and Matching
Motion Analysis. Motion analysis. Now we will talk about. Differential Motion Analysis. Motion analysis. Difference Pictures
 Now we will talk about Motion Analysis Motion analysis Motion analysis is dealing with three main groups of motionrelated problems: Motion detection Moving object detection and location. Derivation of
Now we will talk about Motion Analysis Motion analysis Motion analysis is dealing with three main groups of motionrelated problems: Motion detection Moving object detection and location. Derivation of
Edge and corner detection
 Edge and corner detection Prof. Stricker Doz. G. Bleser Computer Vision: Object and People Tracking Goals Where is the information in an image? How is an object characterized? How can I find measurements
Edge and corner detection Prof. Stricker Doz. G. Bleser Computer Vision: Object and People Tracking Goals Where is the information in an image? How is an object characterized? How can I find measurements
OPPA European Social Fund Prague & EU: We invest in your future.
 OPPA European Social Fund Prague & EU: We invest in your future. Patch tracking based on comparing its piels 1 Tomáš Svoboda, svoboda@cmp.felk.cvut.cz Czech Technical University in Prague, Center for Machine
OPPA European Social Fund Prague & EU: We invest in your future. Patch tracking based on comparing its piels 1 Tomáš Svoboda, svoboda@cmp.felk.cvut.cz Czech Technical University in Prague, Center for Machine
Face Tracking : An implementation of the Kanade-Lucas-Tomasi Tracking algorithm
 Face Tracking : An implementation of the Kanade-Lucas-Tomasi Tracking algorithm Dirk W. Wagener, Ben Herbst Department of Applied Mathematics, University of Stellenbosch, Private Bag X1, Matieland 762,
Face Tracking : An implementation of the Kanade-Lucas-Tomasi Tracking algorithm Dirk W. Wagener, Ben Herbst Department of Applied Mathematics, University of Stellenbosch, Private Bag X1, Matieland 762,
Chapter 3 Image Registration. Chapter 3 Image Registration
 Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
Leow Wee Kheng CS4243 Computer Vision and Pattern Recognition. Motion Tracking. CS4243 Motion Tracking 1
 Leow Wee Kheng CS4243 Computer Vision and Pattern Recognition Motion Tracking CS4243 Motion Tracking 1 Changes are everywhere! CS4243 Motion Tracking 2 Illumination change CS4243 Motion Tracking 3 Shape
Leow Wee Kheng CS4243 Computer Vision and Pattern Recognition Motion Tracking CS4243 Motion Tracking 1 Changes are everywhere! CS4243 Motion Tracking 2 Illumination change CS4243 Motion Tracking 3 Shape
Lecture 20: Tracking. Tuesday, Nov 27
 Lecture 20: Tracking Tuesday, Nov 27 Paper reviews Thorough summary in your own words Main contribution Strengths? Weaknesses? How convincing are the experiments? Suggestions to improve them? Extensions?
Lecture 20: Tracking Tuesday, Nov 27 Paper reviews Thorough summary in your own words Main contribution Strengths? Weaknesses? How convincing are the experiments? Suggestions to improve them? Extensions?
CS231A Section 6: Problem Set 3
 CS231A Section 6: Problem Set 3 Kevin Wong Review 6 -! 1 11/09/2012 Announcements PS3 Due 2:15pm Tuesday, Nov 13 Extra Office Hours: Friday 6 8pm Huang Common Area, Basement Level. Review 6 -! 2 Topics
CS231A Section 6: Problem Set 3 Kevin Wong Review 6 -! 1 11/09/2012 Announcements PS3 Due 2:15pm Tuesday, Nov 13 Extra Office Hours: Friday 6 8pm Huang Common Area, Basement Level. Review 6 -! 2 Topics
Particle Filtering. CS6240 Multimedia Analysis. Leow Wee Kheng. Department of Computer Science School of Computing National University of Singapore
 Particle Filtering CS6240 Multimedia Analysis Leow Wee Kheng Department of Computer Science School of Computing National University of Singapore (CS6240) Particle Filtering 1 / 28 Introduction Introduction
Particle Filtering CS6240 Multimedia Analysis Leow Wee Kheng Department of Computer Science School of Computing National University of Singapore (CS6240) Particle Filtering 1 / 28 Introduction Introduction
Displacement estimation
 Displacement estimation Displacement estimation by block matching" l Search strategies" l Subpixel estimation" Gradient-based displacement estimation ( optical flow )" l Lukas-Kanade" l Multi-scale coarse-to-fine"
Displacement estimation Displacement estimation by block matching" l Search strategies" l Subpixel estimation" Gradient-based displacement estimation ( optical flow )" l Lukas-Kanade" l Multi-scale coarse-to-fine"
Lecture 19: Motion. Effect of window size 11/20/2007. Sources of error in correspondences. Review Problem set 3. Tuesday, Nov 20
 Lecture 19: Motion Review Problem set 3 Dense stereo matching Sparse stereo matching Indexing scenes Tuesda, Nov 0 Effect of window size W = 3 W = 0 Want window large enough to have sufficient intensit
Lecture 19: Motion Review Problem set 3 Dense stereo matching Sparse stereo matching Indexing scenes Tuesda, Nov 0 Effect of window size W = 3 W = 0 Want window large enough to have sufficient intensit
Computer Vision Lecture 20
 Computer Vision Lecture 2 Motion and Optical Flow Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de 28.1.216 Man slides adapted from K. Grauman, S. Seitz, R. Szeliski,
Computer Vision Lecture 2 Motion and Optical Flow Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de 28.1.216 Man slides adapted from K. Grauman, S. Seitz, R. Szeliski,
Capturing, Modeling, Rendering 3D Structures
 Computer Vision Approach Capturing, Modeling, Rendering 3D Structures Calculate pixel correspondences and extract geometry Not robust Difficult to acquire illumination effects, e.g. specular highlights
Computer Vision Approach Capturing, Modeling, Rendering 3D Structures Calculate pixel correspondences and extract geometry Not robust Difficult to acquire illumination effects, e.g. specular highlights
Features Points. Andrea Torsello DAIS Università Ca Foscari via Torino 155, Mestre (VE)
") Features Points Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Finding Corners Edge detectors perform poorly at corners. Corners provide repeatable points for matching, so
Features Points Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Finding Corners Edge detectors perform poorly at corners. Corners provide repeatable points for matching, so
Feature descriptors. Alain Pagani Prof. Didier Stricker. Computer Vision: Object and People Tracking
 Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Lucas-Kanade Motion Estimation. Thanks to Steve Seitz, Simon Baker, Takeo Kanade, and anyone else who helped develop these slides.
 Lucas-Kanade Motion Estimation Thanks to Steve Seitz, Simon Baker, Takeo Kanade, and anyone else who helped develop these slides. 1 Why estimate motion? We live in a 4-D world Wide applications Object
Lucas-Kanade Motion Estimation Thanks to Steve Seitz, Simon Baker, Takeo Kanade, and anyone else who helped develop these slides. 1 Why estimate motion? We live in a 4-D world Wide applications Object
Occluded Facial Expression Tracking
 Occluded Facial Expression Tracking Hugo Mercier 1, Julien Peyras 2, and Patrice Dalle 1 1 Institut de Recherche en Informatique de Toulouse 118, route de Narbonne, F-31062 Toulouse Cedex 9 2 Dipartimento
Occluded Facial Expression Tracking Hugo Mercier 1, Julien Peyras 2, and Patrice Dalle 1 1 Institut de Recherche en Informatique de Toulouse 118, route de Narbonne, F-31062 Toulouse Cedex 9 2 Dipartimento
Automatic Image Alignment (direct) with a lot of slides stolen from Steve Seitz and Rick Szeliski
 with a lot of slides stolen from Steve Seitz and Rick Szeliski") Automatic Image Alignment (direct) with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 Today Go over Midterm Go over Project #3
Automatic Image Alignment (direct) with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 Today Go over Midterm Go over Project #3
Optical Flow-Based Motion Estimation. Thanks to Steve Seitz, Simon Baker, Takeo Kanade, and anyone else who helped develop these slides.
 Optical Flow-Based Motion Estimation Thanks to Steve Seitz, Simon Baker, Takeo Kanade, and anyone else who helped develop these slides. 1 Why estimate motion? We live in a 4-D world Wide applications Object
Optical Flow-Based Motion Estimation Thanks to Steve Seitz, Simon Baker, Takeo Kanade, and anyone else who helped develop these slides. 1 Why estimate motion? We live in a 4-D world Wide applications Object
Computer Vision for HCI. Topics of This Lecture
 Computer Vision for HCI Interest Points Topics of This Lecture Local Invariant Features Motivation Requirements, Invariances Keypoint Localization Features from Accelerated Segment Test (FAST) Harris Shi-Tomasi
Computer Vision for HCI Interest Points Topics of This Lecture Local Invariant Features Motivation Requirements, Invariances Keypoint Localization Features from Accelerated Segment Test (FAST) Harris Shi-Tomasi
SIFT - scale-invariant feature transform Konrad Schindler
 SIFT - scale-invariant feature transform Konrad Schindler Institute of Geodesy and Photogrammetry Invariant interest points Goal match points between images with very different scale, orientation, projective
SIFT - scale-invariant feature transform Konrad Schindler Institute of Geodesy and Photogrammetry Invariant interest points Goal match points between images with very different scale, orientation, projective
Chapter 9 Object Tracking an Overview
 Chapter 9 Object Tracking an Overview The output of the background subtraction algorithm, described in the previous chapter, is a classification (segmentation) of pixels into foreground pixels (those belonging
Chapter 9 Object Tracking an Overview The output of the background subtraction algorithm, described in the previous chapter, is a classification (segmentation) of pixels into foreground pixels (those belonging
Image processing and features
 Image processing and features Gabriele Bleser gabriele.bleser@dfki.de Thanks to Harald Wuest, Folker Wientapper and Marc Pollefeys Introduction Previous lectures: geometry Pose estimation Epipolar geometry
Image processing and features Gabriele Bleser gabriele.bleser@dfki.de Thanks to Harald Wuest, Folker Wientapper and Marc Pollefeys Introduction Previous lectures: geometry Pose estimation Epipolar geometry
CS664 Lecture #18: Motion
 CS664 Lecture #18: Motion Announcements Most paper choices were fine Please be sure to email me for approval, if you haven t already This is intended to help you, especially with the final project Use
CS664 Lecture #18: Motion Announcements Most paper choices were fine Please be sure to email me for approval, if you haven t already This is intended to help you, especially with the final project Use
CS-465 Computer Vision
 CS-465 Computer Vision Nazar Khan PUCIT 9. Optic Flow Optic Flow Nazar Khan Computer Vision 2 / 25 Optic Flow Nazar Khan Computer Vision 3 / 25 Optic Flow Where does pixel (x, y) in frame z move to in
CS-465 Computer Vision Nazar Khan PUCIT 9. Optic Flow Optic Flow Nazar Khan Computer Vision 2 / 25 Optic Flow Nazar Khan Computer Vision 3 / 25 Optic Flow Where does pixel (x, y) in frame z move to in
Anno accademico 2006/2007. Davide Migliore
 Robotica Anno accademico 6/7 Davide Migliore migliore@elet.polimi.it Today What is a feature? Some useful information The world of features: Detectors Edges detection Corners/Points detection Descriptors?!?!?
Robotica Anno accademico 6/7 Davide Migliore migliore@elet.polimi.it Today What is a feature? Some useful information The world of features: Detectors Edges detection Corners/Points detection Descriptors?!?!?
Harder case. Image matching. Even harder case. Harder still? by Diva Sian. by swashford
 Image matching Harder case by Diva Sian by Diva Sian by scgbt by swashford Even harder case Harder still? How the Afghan Girl was Identified by Her Iris Patterns Read the story NASA Mars Rover images Answer
Image matching Harder case by Diva Sian by Diva Sian by scgbt by swashford Even harder case Harder still? How the Afghan Girl was Identified by Her Iris Patterns Read the story NASA Mars Rover images Answer
Local features: detection and description. Local invariant features
 Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
arxiv: v1 [cs.cv] 2 May 2016
![arxiv: v1 [cs.cv] 2 May 2016](/thumbs/86/93079061.jpg "arxiv: v1 [cs.cv] 2 May 2016") 16-811 Math Fundamentals for Robotics Comparison of Optimization Methods in Optical Flow Estimation Final Report, Fall 2015 arxiv:1605.00572v1 [cs.cv] 2 May 2016 Contents Noranart Vesdapunt Master of Computer
16-811 Math Fundamentals for Robotics Comparison of Optimization Methods in Optical Flow Estimation Final Report, Fall 2015 arxiv:1605.00572v1 [cs.cv] 2 May 2016 Contents Noranart Vesdapunt Master of Computer
Marcel Worring Intelligent Sensory Information Systems
 Marcel Worring worring@science.uva.nl Intelligent Sensory Information Systems University of Amsterdam Information and Communication Technology archives of documentaries, film, or training material, video
Marcel Worring worring@science.uva.nl Intelligent Sensory Information Systems University of Amsterdam Information and Communication Technology archives of documentaries, film, or training material, video
Announcements. Computer Vision I. Motion Field Equation. Revisiting the small motion assumption. Visual Tracking. CSE252A Lecture 19.
 Visual Tracking CSE252A Lecture 19 Hw 4 assigned Announcements No class on Thursday 12/6 Extra class on Tuesday 12/4 at 6:30PM in WLH Room 2112 Motion Field Equation Measurements I x = I x, T: Components
Visual Tracking CSE252A Lecture 19 Hw 4 assigned Announcements No class on Thursday 12/6 Extra class on Tuesday 12/4 at 6:30PM in WLH Room 2112 Motion Field Equation Measurements I x = I x, T: Components
Kanade Lucas Tomasi Tracking (KLT tracker)
") Kanade Lucas Tomasi Tracking (KLT tracker) Tomáš Svoboda, svoboda@cmp.felk.cvut.cz Czech Technical University in Prague, Center for Machine Perception http://cmp.felk.cvut.cz Last update: November 26,
Kanade Lucas Tomasi Tracking (KLT tracker) Tomáš Svoboda, svoboda@cmp.felk.cvut.cz Czech Technical University in Prague, Center for Machine Perception http://cmp.felk.cvut.cz Last update: November 26,
ELEC Dr Reji Mathew Electrical Engineering UNSW
 ELEC 4622 Dr Reji Mathew Electrical Engineering UNSW Review of Motion Modelling and Estimation Introduction to Motion Modelling & Estimation Forward Motion Backward Motion Block Motion Estimation Motion
ELEC 4622 Dr Reji Mathew Electrical Engineering UNSW Review of Motion Modelling and Estimation Introduction to Motion Modelling & Estimation Forward Motion Backward Motion Block Motion Estimation Motion
Prof. Fanny Ficuciello Robotics for Bioengineering Visual Servoing
 Visual servoing vision allows a robotic system to obtain geometrical and qualitative information on the surrounding environment high level control motion planning (look-and-move visual grasping) low level
Visual servoing vision allows a robotic system to obtain geometrical and qualitative information on the surrounding environment high level control motion planning (look-and-move visual grasping) low level
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 09 130219 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Feature Descriptors Feature Matching Feature
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 09 130219 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Feature Descriptors Feature Matching Feature
Nonparametric Clustering of High Dimensional Data
 Nonparametric Clustering of High Dimensional Data Peter Meer Electrical and Computer Engineering Department Rutgers University Joint work with Bogdan Georgescu and Ilan Shimshoni Robust Parameter Estimation:
Nonparametric Clustering of High Dimensional Data Peter Meer Electrical and Computer Engineering Department Rutgers University Joint work with Bogdan Georgescu and Ilan Shimshoni Robust Parameter Estimation: