Computer Vision. Introduction
|
|
|
- Maud Simon
- 5 years ago
- Views:
Transcription
1 Computer Vision Introduction Filippo Bergamasco DAIS, Ca Foscari University of Venice Academic year 2016/2017
2 About this course Official UNIVE course page: Unofficial course page: 30 hours frontal lessons (lab included) Timetable: Monday and Tuesday 12:15-1:45 pm Code: CM0193
3 About this course Referral texts: R. C. Gonzalez e R.E. Woods. Digital Image Processing (3rd edition). Pretience Hall R. Szeliski. Computer Vision Algorithms and Applications. Springer Additional useful readings: D. Forsyth and J. Ponce. Computer Vision. A Modern Approach. Prentice-Hall, 2002 E. Trucco and A. Verri. Introductory Techniques for 3D Computer Vision. Prentice-Hall, 1998
4 About the teacher Filippo Bergamasco I m currently a postdoctoral research fellow here at DAIS KiiS research group. I work on 3D reconstruction, camera calibration, ego-motion estimation, photogrammetry etc.

5 About the teacher Filippo Bergamasco For any question regarding this course, please contact me via mail: Or come visit me at my office
6 About the exam... Final exam consists in the development of a project to be performed individually. Project submission information: (more will follow) Send me the full source-code and data at least 1 week before the exam During the exam, I ll ask you to show me your project and explain its details (choice made, trade-offs, strengths and limitations) The goal is to evaluate your knowledge of the most common computer vision techniques and theories
7 About the exam... This year project will be about the development of a simple augmented-reality system Requirements: The project must be developed in C++ and can use the OpenCV Computer Vision Library I m not particularly interested in the coding style, but a clean object-oriented organization of the code is considered a plus Laboratory lessons are designed to let you develop useful core parts for your project (so use the lab time wisely!)
8 About the exam... This year project will be about the development of a simple augmented-reality system DEMO TIME!

9 Are you interested in a challenging computer vision thesis? A thesis activity can substitute the proposed project and assignments. If interested, contact me as soon as possible so we can discuss the details together.
10 About the lab We will spend some hours in the lab so you can put your hands on some of the algorithms discussed during the course After each lab session you will be asked to complete an assignment within 2 weeks (deadline can be slightly postponed in exceptional cases) Completing all the assignments is required (not sufficient) to obtain the full-marks (lode)
11 What is Computer Vision? Computer vision is about building an automatic system that sees Difficult to give a concise definition since the area spans multiple different problems (we will see some examples in a minute ) How we ll consider cv in this course: A set of computational techniques aiming at estimating or making explicit the geometric and dynamic properties of the 3D world from digital images Introductory techniques for 3D computer vision - E. Trucco, A.Verri
12 What is Computer Vision? Different levels of vision: 1. Low (Image processing) a. b. c. Image restoration Contrast enhancement Noise reduction Image Image 2. Medium a. b. Segmentation Shape recognition Images attributes/features 3. High a. Scene understanding Images concepts
13 What is Computer Vision? The purpose of a machine vision system is to produce a symbolic description of what is being imaged As human, we perceive the three-dimensional structure of the world around us with apparent ease Easy to distinguish the flower in the foreground from the leaves in the background From a signal point of view, there are just variations in color and brightness

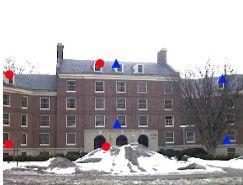
14 What is Computer Vision? What we see What a computer sees
15 A difficult business Despite the remarkable advances in the last decades... the dream of having a computer interpret an image at the same level as a two-year old (for example, counting all of the animals in a picture) remains elusive Humans and animals can interpret images so effortlessly while computer vision algorithms are still error prone: Perceptual components of artificial intelligence (such as vision) is probably as difficult as cognitive ones (logic proving, planning)
16 Human vision Optical illusions give us interesting clues of how the human visual system works (and the inherent assumptions made by our brain) Which one is longer? Müller-Lyer Illusion

17 Human vision The Müller-Lyer illusion occurs because the visual system processes that judge depth and distance assume in general that the "angles in" configuration corresponds to an object which is closer, and the "angles out" configuration corresponds to an object which is far away.

18 Human vision Which one is brighter? The percept is due to brightness constancy, the visual system s attempt to discount illumination when interpreting colors
, the brain assumes a convex shape (especially for")
19 Human vision Rotating mask illusion When determining the shape of an object only from shading (with no stereo vision), the brain assumes a convex shape (especially for faces)

20 Human vision Optical Perception
21 Why is difficult? Giving a symbolic description of the contents of an image is difficult because is intrinsically an inverse problem: We want to recover some unknowns given insufficient information to fully specify the solution We must resort to physic-based and/or probabilistic-based models to disambiguate potential solutions


22 Computer Vision vs. Graphics Computer graphics 3d to 2d implies information loss Computer Vision Need for models A house Some polygons Lines, edges Raster image
23 Computer Vision vs. Graphics The models we use in computer vision are usually developed by: Physics: radiometry, optics, etc. Computer graphics And describe how: Objects move or animate Light reflects from object surfaces Shapes get projected to the sensor image plane etc.

24 Computer Vision vs. Graphics In limited contexts, computer graphics nowadays is so advanced that the illusion of reality is almost perfect
25 Computer Vision applications So, what are the most common applications in which computer vision is used today?


26 Computer Vision applications Optical Character Recognition (OCR)

27 Computer Vision applications Optical Character Recognition (OCR)


28 Computer Vision applications Machine inspection

29 Computer Vision applications Machine inspection Pipe inspection device developed in our lab


30 Computer Vision applications Surveillance


31 Computer Vision applications Face detection and recognition

32 Computer Vision applications Face capture and reenactment

33 Computer Vision applications Medical image analysis

34 Computer Vision applications Driving assistance

35 Computer Vision applications Driving autopilot (autonomous vehicles)

36 Computer Vision applications Smart advertising



37 Computer Vision applications Panorama stitching

38 Computer Vision applications Stereo 3D reconstruction

39 Computer Vision applications Stereo 3D reconstruction Sea waves 3D reconstruction pipeline


40 Computer Vision applications 3D reconstruction (structure from motion)

41 Computer Vision applications 3D reconstruction (structure from motion)

42 Computer Vision applications Structured-light scanning



43 Computer Vision applications And much, much more...
44 A Brief History 1970: What started distinguishing computer vision from image processing were early attempts to infer 3D structure from images: Lines extraction and labelling, stereo correspondences, optical flow, structure from motion
45 A Brief History 1980: attention was focused on more sophisticated mathematical techniques for performing quantitative image and scene analysis: Variational optimization, MRFs, Image Pyramids, 3D scanning
46 A Brief History 1990: While a lot of the previously mentioned topics continued to be explored, a few of them became significantly more active: Sfm, bundle adjustment, projective invariants, multi-view stereo, image segmentation (GC)
47 A Brief History 2000: Continuous advances of all the previous topics: SIFT features, texture synthesis, computational photography, learning
Introduction to Computer Vision
 Introduction to Computer Vision Dr. Gerhard Roth COMP 4102A Winter 2015 Version 2 General Information Instructor: Adjunct Prof. Dr. Gerhard Roth gerhardroth@rogers.com read hourly gerhardroth@cmail.carleton.ca
Introduction to Computer Vision Dr. Gerhard Roth COMP 4102A Winter 2015 Version 2 General Information Instructor: Adjunct Prof. Dr. Gerhard Roth gerhardroth@rogers.com read hourly gerhardroth@cmail.carleton.ca
All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them.
![All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them.](/thumbs/91/106597332.jpg "All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them.") All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them. - Aristotle University of Texas at Arlington Introduction
All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them. - Aristotle University of Texas at Arlington Introduction
Colorado School of Mines. Computer Vision. Professor William Hoff Dept of Electrical Engineering &Computer Science.
 Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Introduction to 2 What is? A process that produces from images of the external world a description
Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Introduction to 2 What is? A process that produces from images of the external world a description
EECS 442 Computer Vision fall 2011
 EECS 442 Computer Vision fall 2011 Instructor Silvio Savarese silvio@eecs.umich.edu Office: ECE Building, room: 4435 Office hour: Tues 4:30-5:30pm or under appoint. (after conversation hour) GSIs: Mohit
EECS 442 Computer Vision fall 2011 Instructor Silvio Savarese silvio@eecs.umich.edu Office: ECE Building, room: 4435 Office hour: Tues 4:30-5:30pm or under appoint. (after conversation hour) GSIs: Mohit
What is Computer Vision? Introduction. We all make mistakes. Why is this hard? What was happening. What do you see? Intro Computer Vision
 What is Computer Vision? Trucco and Verri (Text): Computing properties of the 3-D world from one or more digital images Introduction Introduction to Computer Vision CSE 152 Lecture 1 Sockman and Shapiro:
What is Computer Vision? Trucco and Verri (Text): Computing properties of the 3-D world from one or more digital images Introduction Introduction to Computer Vision CSE 152 Lecture 1 Sockman and Shapiro:
Announcements. Motion. Structure-from-Motion (SFM) Motion. Discrete Motion: Some Counting
 Motion. Discrete Motion: Some Counting") Announcements Motion Introduction to Computer Vision CSE 152 Lecture 20 HW 4 due Friday at Midnight Final Exam: Tuesday, 6/12 at 8:00AM-11:00AM, regular classroom Extra Office Hours: Monday 6/11 9:00AM-10:00AM
Announcements Motion Introduction to Computer Vision CSE 152 Lecture 20 HW 4 due Friday at Midnight Final Exam: Tuesday, 6/12 at 8:00AM-11:00AM, regular classroom Extra Office Hours: Monday 6/11 9:00AM-10:00AM
CAP 5415 Computer Vision. Fall 2011
 CAP 5415 Computer Vision Fall 2011 General Instructor: Dr. Mubarak Shah Email: shah@eecs.ucf.edu Office: 247-F HEC Course Class Time Tuesdays, Thursdays 12 Noon to 1:15PM 383 ENGR Office hours Tuesdays
CAP 5415 Computer Vision Fall 2011 General Instructor: Dr. Mubarak Shah Email: shah@eecs.ucf.edu Office: 247-F HEC Course Class Time Tuesdays, Thursdays 12 Noon to 1:15PM 383 ENGR Office hours Tuesdays
CSE 4392/5369. Dr. Gian Luca Mariottini, Ph.D.
 University of Texas at Arlington CSE 4392/5369 Introduction to Vision Sensing Dr. Gian Luca Mariottini, Ph.D. Department of Computer Science and Engineering University of Texas at Arlington WEB : http://ranger.uta.edu/~gianluca
University of Texas at Arlington CSE 4392/5369 Introduction to Vision Sensing Dr. Gian Luca Mariottini, Ph.D. Department of Computer Science and Engineering University of Texas at Arlington WEB : http://ranger.uta.edu/~gianluca
CSc I6716 Spring D Computer Vision. Introduction. Instructor: Zhigang Zhu City College of New York
 Introduction CSc I6716 Spring 2012 Introduction Instructor: Zhigang Zhu City College of New York zzhu@ccny.cuny.edu Course Information Basic Information: Course participation p Books, notes, etc. Web page
Introduction CSc I6716 Spring 2012 Introduction Instructor: Zhigang Zhu City College of New York zzhu@ccny.cuny.edu Course Information Basic Information: Course participation p Books, notes, etc. Web page
COMPUTER VISION. Dr. Sukhendu Das Deptt. of Computer Science and Engg., IIT Madras, Chennai
 COMPUTER VISION Dr. Sukhendu Das Deptt. of Computer Science and Engg., IIT Madras, Chennai 600036. Email: sdas@iitm.ac.in URL: //www.cs.iitm.ernet.in/~sdas 1 INTRODUCTION 2 Human Vision System (HVS) Vs.
COMPUTER VISION Dr. Sukhendu Das Deptt. of Computer Science and Engg., IIT Madras, Chennai 600036. Email: sdas@iitm.ac.in URL: //www.cs.iitm.ernet.in/~sdas 1 INTRODUCTION 2 Human Vision System (HVS) Vs.
Geometry of Multiple views
 1 Geometry of Multiple views CS 554 Computer Vision Pinar Duygulu Bilkent University 2 Multiple views Despite the wealth of information contained in a a photograph, the depth of a scene point along the
1 Geometry of Multiple views CS 554 Computer Vision Pinar Duygulu Bilkent University 2 Multiple views Despite the wealth of information contained in a a photograph, the depth of a scene point along the
ECG782: Multidimensional Digital Signal Processing
 Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Lecture 01 Introduction http://www.ee.unlv.edu/~b1morris/ecg782/ 2 Outline Computer Vision
Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Lecture 01 Introduction http://www.ee.unlv.edu/~b1morris/ecg782/ 2 Outline Computer Vision
Course Name: Computer Vision Course Code: IT444
 Course Name: Computer Vision Course Code: IT444 I. Basic Course Information Major or minor element of program: Major Department offering the course:information Technology Department Academic level:400
Course Name: Computer Vision Course Code: IT444 I. Basic Course Information Major or minor element of program: Major Department offering the course:information Technology Department Academic level:400
Finally: Motion and tracking. Motion 4/20/2011. CS 376 Lecture 24 Motion 1. Video. Uses of motion. Motion parallax. Motion field
 Finally: Motion and tracking Tracking objects, video analysis, low level motion Motion Wed, April 20 Kristen Grauman UT-Austin Many slides adapted from S. Seitz, R. Szeliski, M. Pollefeys, and S. Lazebnik
Finally: Motion and tracking Tracking objects, video analysis, low level motion Motion Wed, April 20 Kristen Grauman UT-Austin Many slides adapted from S. Seitz, R. Szeliski, M. Pollefeys, and S. Lazebnik
Computer Vision Lecture 17
 Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Final Exam Study Guide
 Final Exam Study Guide Exam Window: 28th April, 12:00am EST to 30th April, 11:59pm EST Description As indicated in class the goal of the exam is to encourage you to review the material from the course.
Final Exam Study Guide Exam Window: 28th April, 12:00am EST to 30th April, 11:59pm EST Description As indicated in class the goal of the exam is to encourage you to review the material from the course.
3D Computer Vision. Introduction. Introduction. CSc I6716 Fall Instructor: Zhigang Zhu City College of New York
 Introduction CSc I6716 Fall 2010 3D Computer Vision Introduction Instructor: Zhigang Zhu City College of New York zzhu@ccny.cuny.edu Course Information Basic Information: Course participation Books, notes,
Introduction CSc I6716 Fall 2010 3D Computer Vision Introduction Instructor: Zhigang Zhu City College of New York zzhu@ccny.cuny.edu Course Information Basic Information: Course participation Books, notes,
Overview of Computer Vision. CS308 Data Structures
 Overview of Computer Vision CS308 Data Structures What is Computer Vision? Deals with the development of the theoretical and algorithmic basis by which useful information about the 3D world can be automatically
Overview of Computer Vision CS308 Data Structures What is Computer Vision? Deals with the development of the theoretical and algorithmic basis by which useful information about the 3D world can be automatically
Computer Vision Lecture 17
 Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Project 4 Results. Representation. Data. Learning. Zachary, Hung-I, Paul, Emanuel. SIFT and HoG are popular and successful.
 Project 4 Results Representation SIFT and HoG are popular and successful. Data Hugely varying results from hard mining. Learning Non-linear classifier usually better. Zachary, Hung-I, Paul, Emanuel Project
Project 4 Results Representation SIFT and HoG are popular and successful. Data Hugely varying results from hard mining. Learning Non-linear classifier usually better. Zachary, Hung-I, Paul, Emanuel Project
Computer Vision. I-Chen Lin, Assistant Professor Dept. of CS, National Chiao Tung University
 Computer Vision I-Chen Lin, Assistant Professor Dept. of CS, National Chiao Tung University About the course Course title: Computer Vision Lectures: EC016, 10:10~12:00(Tues.); 15:30~16:20(Thurs.) Pre-requisites:
Computer Vision I-Chen Lin, Assistant Professor Dept. of CS, National Chiao Tung University About the course Course title: Computer Vision Lectures: EC016, 10:10~12:00(Tues.); 15:30~16:20(Thurs.) Pre-requisites:
Expectations. Computer Vision. Grading. Grading. Our Goal. Our Goal
 Computer Vision Expectations Me. Robert Pless pless@cse.wustl.edu 518 Lopata Hall. Office Hours: Thursday 7-8 Virtual Office Hours: Tuesday 3-4 (profpless on AIM, YahooMessenger) Class. CSE 519, Computer
Computer Vision Expectations Me. Robert Pless pless@cse.wustl.edu 518 Lopata Hall. Office Hours: Thursday 7-8 Virtual Office Hours: Tuesday 3-4 (profpless on AIM, YahooMessenger) Class. CSE 519, Computer
Optical flow and tracking
 EECS 442 Computer vision Optical flow and tracking Intro Optical flow and feature tracking Lucas-Kanade algorithm Motion segmentation Segments of this lectures are courtesy of Profs S. Lazebnik S. Seitz,
EECS 442 Computer vision Optical flow and tracking Intro Optical flow and feature tracking Lucas-Kanade algorithm Motion segmentation Segments of this lectures are courtesy of Profs S. Lazebnik S. Seitz,
Motion and Tracking. Andrea Torsello DAIS Università Ca Foscari via Torino 155, Mestre (VE)
") Motion and Tracking Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Motion Segmentation Segment the video into multiple coherently moving objects Motion and Perceptual Organization
Motion and Tracking Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Motion Segmentation Segment the video into multiple coherently moving objects Motion and Perceptual Organization
Introduction to Computer Vision MARCH 2018
 Introduction to Computer Vision RODNEY DOCKTER, PH.D. MARCH 2018 1 Rodney Dockter (me) Ph.D. in Mechanical Engineering from the University of Minnesota Worked in Dr. Tim Kowalewski s lab Medical robotics
Introduction to Computer Vision RODNEY DOCKTER, PH.D. MARCH 2018 1 Rodney Dockter (me) Ph.D. in Mechanical Engineering from the University of Minnesota Worked in Dr. Tim Kowalewski s lab Medical robotics
Tecnologie per la ricostruzione di modelli 3D da immagini. Marco Callieri ISTI-CNR, Pisa, Italy
 Tecnologie per la ricostruzione di modelli 3D da immagini Marco Callieri ISTI-CNR, Pisa, Italy Who am I? Marco Callieri PhD in computer science Always had the like for 3D graphics... Researcher at the
Tecnologie per la ricostruzione di modelli 3D da immagini Marco Callieri ISTI-CNR, Pisa, Italy Who am I? Marco Callieri PhD in computer science Always had the like for 3D graphics... Researcher at the
Last update: May 4, Vision. CMSC 421: Chapter 24. CMSC 421: Chapter 24 1
 Last update: May 4, 200 Vision CMSC 42: Chapter 24 CMSC 42: Chapter 24 Outline Perception generally Image formation Early vision 2D D Object recognition CMSC 42: Chapter 24 2 Perception generally Stimulus
Last update: May 4, 200 Vision CMSC 42: Chapter 24 CMSC 42: Chapter 24 Outline Perception generally Image formation Early vision 2D D Object recognition CMSC 42: Chapter 24 2 Perception generally Stimulus
CS 498 VR. Lecture 20-4/11/18. go.illinois.edu/vrlect20
 CS 498 VR Lecture 20-4/11/18 go.illinois.edu/vrlect20 Review from last lecture Texture, Normal mapping Three types of optical distortion? How does texture mipmapping work? Improving Latency and Frame Rates
CS 498 VR Lecture 20-4/11/18 go.illinois.edu/vrlect20 Review from last lecture Texture, Normal mapping Three types of optical distortion? How does texture mipmapping work? Improving Latency and Frame Rates
Lecture 19: Motion. Effect of window size 11/20/2007. Sources of error in correspondences. Review Problem set 3. Tuesday, Nov 20
 Lecture 19: Motion Review Problem set 3 Dense stereo matching Sparse stereo matching Indexing scenes Tuesda, Nov 0 Effect of window size W = 3 W = 0 Want window large enough to have sufficient intensit
Lecture 19: Motion Review Problem set 3 Dense stereo matching Sparse stereo matching Indexing scenes Tuesda, Nov 0 Effect of window size W = 3 W = 0 Want window large enough to have sufficient intensit
Miniature faking. In close-up photo, the depth of field is limited.
 Miniature faking In close-up photo, the depth of field is limited. http://en.wikipedia.org/wiki/file:jodhpur_tilt_shift.jpg Miniature faking Miniature faking http://en.wikipedia.org/wiki/file:oregon_state_beavers_tilt-shift_miniature_greg_keene.jpg
Miniature faking In close-up photo, the depth of field is limited. http://en.wikipedia.org/wiki/file:jodhpur_tilt_shift.jpg Miniature faking Miniature faking http://en.wikipedia.org/wiki/file:oregon_state_beavers_tilt-shift_miniature_greg_keene.jpg
Structure from Motion. Introduction to Computer Vision CSE 152 Lecture 10
 Structure from Motion CSE 152 Lecture 10 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 8: Structure from Motion Optional: Multiple View Geometry in Computer Vision, 2nd edition, Hartley
Structure from Motion CSE 152 Lecture 10 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 8: Structure from Motion Optional: Multiple View Geometry in Computer Vision, 2nd edition, Hartley
Announcements. Motion. Structure-from-Motion (SFM) Motion. Discrete Motion: Some Counting
 Motion. Discrete Motion: Some Counting") Announcements Motion HW 4 due Friday Final Exam: Tuesday, 6/7 at 8:00-11:00 Fill out your CAPES Introduction to Computer Vision CSE 152 Lecture 20 Motion Some problems of motion 1. Correspondence: Where
Announcements Motion HW 4 due Friday Final Exam: Tuesday, 6/7 at 8:00-11:00 Fill out your CAPES Introduction to Computer Vision CSE 152 Lecture 20 Motion Some problems of motion 1. Correspondence: Where
What is computer vision?
 What is computer vision? Computer vision (image understanding) is a discipline that studies how to reconstruct, interpret and understand a 3D scene from its 2D images in terms of the properties of the
What is computer vision? Computer vision (image understanding) is a discipline that studies how to reconstruct, interpret and understand a 3D scene from its 2D images in terms of the properties of the
CS 534: Computer Vision Segmentation and Perceptual Grouping
 CS 534: Computer Vision Segmentation and Perceptual Grouping Spring 2005 Ahmed Elgammal Dept of Computer Science CS 534 Segmentation - 1 Where are we? Image Formation Human vision Cameras Geometric Camera
CS 534: Computer Vision Segmentation and Perceptual Grouping Spring 2005 Ahmed Elgammal Dept of Computer Science CS 534 Segmentation - 1 Where are we? Image Formation Human vision Cameras Geometric Camera
Tecnologie per la ricostruzione di modelli 3D da immagini. Marco Callieri ISTI-CNR, Pisa, Italy
 Tecnologie per la ricostruzione di modelli 3D da immagini Marco Callieri ISTI-CNR, Pisa, Italy 3D from Photos Our not-so-secret dream: obtain a reliable and precise 3D from simple photos Why? Easier, less
Tecnologie per la ricostruzione di modelli 3D da immagini Marco Callieri ISTI-CNR, Pisa, Italy 3D from Photos Our not-so-secret dream: obtain a reliable and precise 3D from simple photos Why? Easier, less
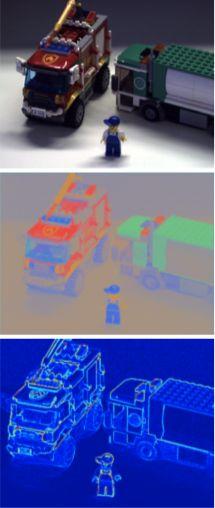
3D Fusion of Infrared Images with Dense RGB Reconstruction from Multiple Views - with Application to Fire-fighting Robots
 3D Fusion of Infrared Images with Dense RGB Reconstruction from Multiple Views - with Application to Fire-fighting Robots Yuncong Chen 1 and Will Warren 2 1 Department of Computer Science and Engineering,
3D Fusion of Infrared Images with Dense RGB Reconstruction from Multiple Views - with Application to Fire-fighting Robots Yuncong Chen 1 and Will Warren 2 1 Department of Computer Science and Engineering,
What is Computer Vision?
 Perceptual Grouping in Computer Vision Gérard Medioni University of Southern California What is Computer Vision? Computer Vision Attempt to emulate Human Visual System Perceive visual stimuli with cameras
Perceptual Grouping in Computer Vision Gérard Medioni University of Southern California What is Computer Vision? Computer Vision Attempt to emulate Human Visual System Perceive visual stimuli with cameras
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely Light & Perception Announcements Quiz on Tuesday Project 3 code due Monday, April 17, by 11:59pm artifact due Wednesday, April 19, by 11:59pm Can we determine shape
CS5670: Computer Vision Noah Snavely Light & Perception Announcements Quiz on Tuesday Project 3 code due Monday, April 17, by 11:59pm artifact due Wednesday, April 19, by 11:59pm Can we determine shape
3D from Images - Assisted Modeling, Photogrammetry. Marco Callieri ISTI-CNR, Pisa, Italy
 3D from Images - Assisted Modeling, Photogrammetry Marco Callieri ISTI-CNR, Pisa, Italy 3D from Photos Our not-so-secret dream: obtain a reliable and precise 3D from simple photos Why? Easier, cheaper
3D from Images - Assisted Modeling, Photogrammetry Marco Callieri ISTI-CNR, Pisa, Italy 3D from Photos Our not-so-secret dream: obtain a reliable and precise 3D from simple photos Why? Easier, cheaper
Video Mosaics for Virtual Environments, R. Szeliski. Review by: Christopher Rasmussen
 Video Mosaics for Virtual Environments, R. Szeliski Review by: Christopher Rasmussen September 19, 2002 Announcements Homework due by midnight Next homework will be assigned Tuesday, due following Tuesday.
Video Mosaics for Virtual Environments, R. Szeliski Review by: Christopher Rasmussen September 19, 2002 Announcements Homework due by midnight Next homework will be assigned Tuesday, due following Tuesday.
Computer Vision, CS766. Staff. Instructor: Li Zhang TA: Jake Rosin
 Computer Vision, CS766 Staff Instructor: Li Zhang lizhang@cs.wisc.edu TA: Jake Rosin rosin@cs.wisc.edu Today Introduction Administrative Stuff Overview of the Course About Me Li Zhang ( 张力 ) Last name
Computer Vision, CS766 Staff Instructor: Li Zhang lizhang@cs.wisc.edu TA: Jake Rosin rosin@cs.wisc.edu Today Introduction Administrative Stuff Overview of the Course About Me Li Zhang ( 张力 ) Last name
EECS 442 Computer Vision fall 2012
 EECS 442 Computer Vision fall 2012 Instructor Silvio Savarese silvio@eecs.umich.edu Office: ECE Building, room: 4435 Office hour: Tues 4:30-5:30pm or under appoint. GSI: Johnny Chao (ywchao125@gmail.com)
EECS 442 Computer Vision fall 2012 Instructor Silvio Savarese silvio@eecs.umich.edu Office: ECE Building, room: 4435 Office hour: Tues 4:30-5:30pm or under appoint. GSI: Johnny Chao (ywchao125@gmail.com)
Il colore: acquisizione e visualizzazione. Lezione 17: 11 Maggio 2012
 Il colore: acquisizione e visualizzazione Lezione 17: 11 Maggio 2012 The importance of color information Precision vs. Perception 3D scanned geometry Photo Color and appearance Pure geometry Pure color
Il colore: acquisizione e visualizzazione Lezione 17: 11 Maggio 2012 The importance of color information Precision vs. Perception 3D scanned geometry Photo Color and appearance Pure geometry Pure color
Announcements. Introduction. Why is this hard? What is Computer Vision? We all make mistakes. What do you see? Class Web Page is up:
 Announcements Introduction Computer Vision I CSE 252A Lecture 1 Class Web Page is up: http://www.cs.ucsd.edu/classes/wi05/cse252a/ Assignment 0: Getting Started with Matlab is posted to web page, due 1/13/04
Announcements Introduction Computer Vision I CSE 252A Lecture 1 Class Web Page is up: http://www.cs.ucsd.edu/classes/wi05/cse252a/ Assignment 0: Getting Started with Matlab is posted to web page, due 1/13/04
Lecture 14: Computer Vision
 CS/b: Artificial Intelligence II Prof. Olga Veksler Lecture : Computer Vision D shape from Images Stereo Reconstruction Many Slides are from Steve Seitz (UW), S. Narasimhan Outline Cues for D shape perception
CS/b: Artificial Intelligence II Prof. Olga Veksler Lecture : Computer Vision D shape from Images Stereo Reconstruction Many Slides are from Steve Seitz (UW), S. Narasimhan Outline Cues for D shape perception
Stereo: Disparity and Matching
 CS 4495 Computer Vision Aaron Bobick School of Interactive Computing Administrivia PS2 is out. But I was late. So we pushed the due date to Wed Sept 24 th, 11:55pm. There is still *no* grace period. To
CS 4495 Computer Vision Aaron Bobick School of Interactive Computing Administrivia PS2 is out. But I was late. So we pushed the due date to Wed Sept 24 th, 11:55pm. There is still *no* grace period. To
Why is computer vision difficult?
 Why is computer vision difficult? Viewpoint variation Illumination Scale Why is computer vision difficult? Intra-class variation Motion (Source: S. Lazebnik) Background clutter Occlusion Challenges: local
Why is computer vision difficult? Viewpoint variation Illumination Scale Why is computer vision difficult? Intra-class variation Motion (Source: S. Lazebnik) Background clutter Occlusion Challenges: local
Visual Imaging in the Electronic Age Assignment #3 Draft Geometry Capture
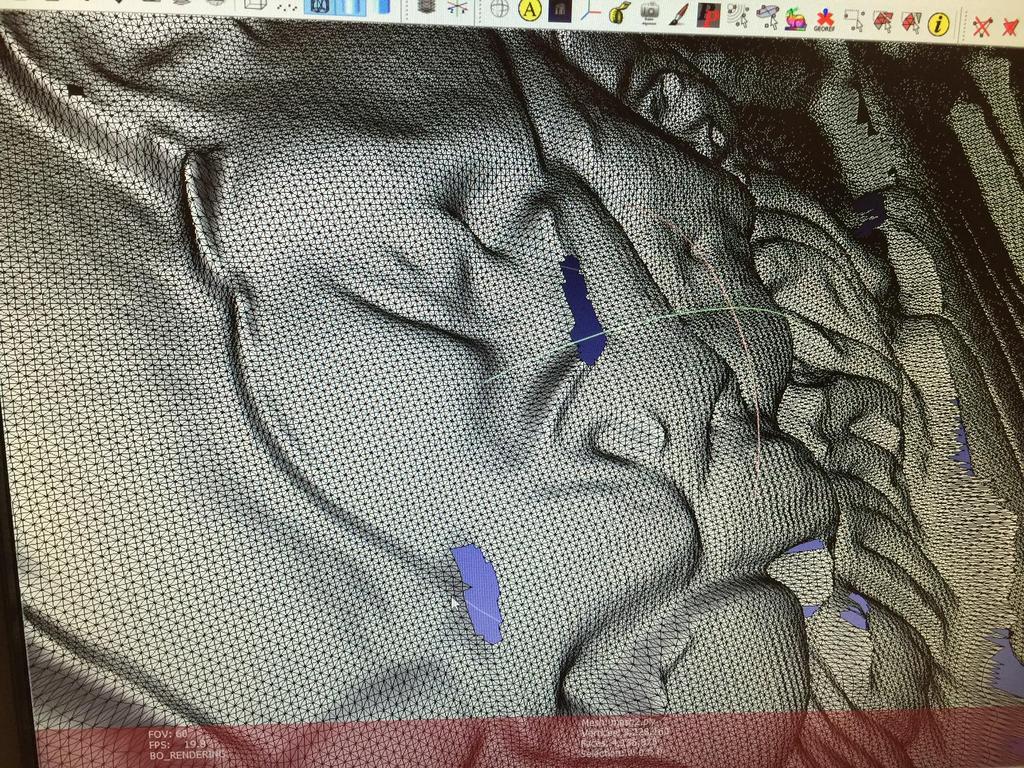
 Visual Imaging in the Electronic Age Assignment #3 Draft Geometry Capture Assigned: October 5, 2017 Due Date: TBA (October 2017) The above image is of the sculpture by James Mahoney, which was demonstrated
Visual Imaging in the Electronic Age Assignment #3 Draft Geometry Capture Assigned: October 5, 2017 Due Date: TBA (October 2017) The above image is of the sculpture by James Mahoney, which was demonstrated
Depth Camera for Mobile Devices
 Depth Camera for Mobile Devices Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Stereo Cameras Structured Light Cameras Time of Flight (ToF) Camera Inferring 3D Points Given we have
Depth Camera for Mobile Devices Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Stereo Cameras Structured Light Cameras Time of Flight (ToF) Camera Inferring 3D Points Given we have
Depth. Common Classification Tasks. Example: AlexNet. Another Example: Inception. Another Example: Inception. Depth
 Common Classification Tasks Recognition of individual objects/faces Analyze object-specific features (e.g., key points) Train with images from different viewing angles Recognition of object classes Analyze
Common Classification Tasks Recognition of individual objects/faces Analyze object-specific features (e.g., key points) Train with images from different viewing angles Recognition of object classes Analyze
Project 2 due today Project 3 out today. Readings Szeliski, Chapter 10 (through 10.5)
") Announcements Stereo Project 2 due today Project 3 out today Single image stereogram, by Niklas Een Readings Szeliski, Chapter 10 (through 10.5) Public Library, Stereoscopic Looking Room, Chicago, by Phillips,
Announcements Stereo Project 2 due today Project 3 out today Single image stereogram, by Niklas Een Readings Szeliski, Chapter 10 (through 10.5) Public Library, Stereoscopic Looking Room, Chicago, by Phillips,
Block Diagram. Physical World. Image Acquisition. Enhancement and Restoration. Segmentation. Feature Selection/Extraction.
 Block Diagram Physical World Image Acquisition Imaging Image Sampling, Quantization, Compression Image Processing Enhancement and Restoration Segmentation Image Analysis Feature Selection/Extraction Image
Block Diagram Physical World Image Acquisition Imaging Image Sampling, Quantization, Compression Image Processing Enhancement and Restoration Segmentation Image Analysis Feature Selection/Extraction Image
An Introduc+on to Mathema+cal Image Processing IAS, Park City Mathema2cs Ins2tute, Utah Undergraduate Summer School 2010
 An Introduc+on to Mathema+cal Image Processing IAS, Park City Mathema2cs Ins2tute, Utah Undergraduate Summer School 2010 Luminita Vese Todd WiCman Department of Mathema2cs, UCLA lvese@math.ucla.edu wicman@math.ucla.edu
An Introduc+on to Mathema+cal Image Processing IAS, Park City Mathema2cs Ins2tute, Utah Undergraduate Summer School 2010 Luminita Vese Todd WiCman Department of Mathema2cs, UCLA lvese@math.ucla.edu wicman@math.ucla.edu
Peripheral drift illusion
 Peripheral drift illusion Does it work on other animals? Computer Vision Motion and Optical Flow Many slides adapted from J. Hays, S. Seitz, R. Szeliski, M. Pollefeys, K. Grauman and others Video A video
Peripheral drift illusion Does it work on other animals? Computer Vision Motion and Optical Flow Many slides adapted from J. Hays, S. Seitz, R. Szeliski, M. Pollefeys, K. Grauman and others Video A video
0. Introduction: What is Computer Graphics? 1. Basics of scan conversion (line drawing) 2. Representing 2D curves
 2. Representing 2D curves") CSC 418/2504: Computer Graphics Course web site (includes course information sheet): http://www.dgp.toronto.edu/~elf Instructor: Eugene Fiume Office: BA 5266 Phone: 416 978 5472 (not a reliable way) Email:
CSC 418/2504: Computer Graphics Course web site (includes course information sheet): http://www.dgp.toronto.edu/~elf Instructor: Eugene Fiume Office: BA 5266 Phone: 416 978 5472 (not a reliable way) Email:
Thanks to Chris Bregler. COS 429: Computer Vision
 Thanks to Chris Bregler COS 429: Computer Vision COS 429: Computer Vision Instructor: Szymon Rusinkiewicz TA: Linjie Luo smr@cs.princeton.edu linjiel@cs.princeton.edu Course web page http://www.cs.princeton.edu/courses/archive/fall09/cos429/
Thanks to Chris Bregler COS 429: Computer Vision COS 429: Computer Vision Instructor: Szymon Rusinkiewicz TA: Linjie Luo smr@cs.princeton.edu linjiel@cs.princeton.edu Course web page http://www.cs.princeton.edu/courses/archive/fall09/cos429/
Camera Model and Calibration. Lecture-12
 Camera Model and Calibration Lecture-12 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Camera Model and Calibration Lecture-12 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Passive 3D Photography
 SIGGRAPH 2000 Course on 3D Photography Passive 3D Photography Steve Seitz Carnegie Mellon University University of Washington http://www.cs cs.cmu.edu/~ /~seitz Visual Cues Shading Merle Norman Cosmetics,
SIGGRAPH 2000 Course on 3D Photography Passive 3D Photography Steve Seitz Carnegie Mellon University University of Washington http://www.cs cs.cmu.edu/~ /~seitz Visual Cues Shading Merle Norman Cosmetics,
Robert Collins CSE486, Penn State Lecture 08: Introduction to Stereo
 Lecture 08: Introduction to Stereo Reading: T&V Section 7.1 Stereo Vision Inferring depth from images taken at the same time by two or more cameras. Basic Perspective Projection Scene Point Perspective
Lecture 08: Introduction to Stereo Reading: T&V Section 7.1 Stereo Vision Inferring depth from images taken at the same time by two or more cameras. Basic Perspective Projection Scene Point Perspective
Image Analysis. Lars Schmidt-Thieme
 Image Analysis Image Analysis Lars Schmidt-Thieme Information Systems and Machine Learning Lab (ISMLL) Institute for Business Economics and Information Systems & Institute for Computer Science University
Image Analysis Image Analysis Lars Schmidt-Thieme Information Systems and Machine Learning Lab (ISMLL) Institute for Business Economics and Information Systems & Institute for Computer Science University
CS535: Interactive Computer Graphics
 CS535: Interactive Computer Graphics Instructor: Daniel G. Aliaga (aliaga@cs.purdue.edu, www.cs.purdue.edu/homes/aliaga) Classroom: LWSN B134 Time: MWF @ 1:30-2:20pm Office hours: by appointment (LWSN
CS535: Interactive Computer Graphics Instructor: Daniel G. Aliaga (aliaga@cs.purdue.edu, www.cs.purdue.edu/homes/aliaga) Classroom: LWSN B134 Time: MWF @ 1:30-2:20pm Office hours: by appointment (LWSN
Announcements. Stereo Vision Wrapup & Intro Recognition
 Announcements Stereo Vision Wrapup & Intro Introduction to Computer Vision CSE 152 Lecture 17 HW3 due date postpone to Thursday HW4 to posted by Thursday, due next Friday. Order of material we ll first
Announcements Stereo Vision Wrapup & Intro Introduction to Computer Vision CSE 152 Lecture 17 HW3 due date postpone to Thursday HW4 to posted by Thursday, due next Friday. Order of material we ll first
Computer and Machine Vision
 Computer and Machine Vision Lecture Week 4 Part-2 February 5, 2014 Sam Siewert Outline of Week 4 Practical Methods for Dealing with Camera Streams, Frame by Frame and De-coding/Re-encoding for Analysis
Computer and Machine Vision Lecture Week 4 Part-2 February 5, 2014 Sam Siewert Outline of Week 4 Practical Methods for Dealing with Camera Streams, Frame by Frame and De-coding/Re-encoding for Analysis
Computer Vision. CS664 Computer Vision. 1. Introduction. Course Requirements. Preparation. Applications. Applications of Computer Vision
 Computer Vision CS664 Computer Vision. Introduction Dan Huttenlocher Machines that see Broad field, any course will cover a subset of problems and techniques Closely related fields of study Artificial
Computer Vision CS664 Computer Vision. Introduction Dan Huttenlocher Machines that see Broad field, any course will cover a subset of problems and techniques Closely related fields of study Artificial
CS 378: Autonomous Intelligent Robotics. Instructor: Jivko Sinapov
 CS 378: Autonomous Intelligent Robotics Instructor: Jivko Sinapov http://www.cs.utexas.edu/~jsinapov/teaching/cs378/ Visual Registration and Recognition Announcements Homework 6 is out, due 4/5 4/7 Installing
CS 378: Autonomous Intelligent Robotics Instructor: Jivko Sinapov http://www.cs.utexas.edu/~jsinapov/teaching/cs378/ Visual Registration and Recognition Announcements Homework 6 is out, due 4/5 4/7 Installing
Digital Image Processing
 Digital Image Processing Third Edition Rafael C. Gonzalez University of Tennessee Richard E. Woods MedData Interactive PEARSON Prentice Hall Pearson Education International Contents Preface xv Acknowledgments
Digital Image Processing Third Edition Rafael C. Gonzalez University of Tennessee Richard E. Woods MedData Interactive PEARSON Prentice Hall Pearson Education International Contents Preface xv Acknowledgments
Computational Optical Imaging - Optique Numerique. -- Single and Multiple View Geometry, Stereo matching --
 Computational Optical Imaging - Optique Numerique -- Single and Multiple View Geometry, Stereo matching -- Autumn 2015 Ivo Ihrke with slides by Thorsten Thormaehlen Reminder: Feature Detection and Matching
Computational Optical Imaging - Optique Numerique -- Single and Multiple View Geometry, Stereo matching -- Autumn 2015 Ivo Ihrke with slides by Thorsten Thormaehlen Reminder: Feature Detection and Matching
Computational Imaging for Self-Driving Vehicles
 CVPR 2018 Computational Imaging for Self-Driving Vehicles Jan Kautz--------Ramesh Raskar--------Achuta Kadambi--------Guy Satat Computational Imaging for Self-Driving Vehicles Jan Kautz--------Ramesh Raskar--------Achuta
CVPR 2018 Computational Imaging for Self-Driving Vehicles Jan Kautz--------Ramesh Raskar--------Achuta Kadambi--------Guy Satat Computational Imaging for Self-Driving Vehicles Jan Kautz--------Ramesh Raskar--------Achuta
Computer Vision EE837, CS867, CE803
 Computer Vision EE837, CS867, CE803 Introduction Lecture 01 Computer Vision Prerequisites Basic linear Algebra, probability, calculus - Required Basic data structures/programming knowledge - Required Working
Computer Vision EE837, CS867, CE803 Introduction Lecture 01 Computer Vision Prerequisites Basic linear Algebra, probability, calculus - Required Basic data structures/programming knowledge - Required Working
CS231A Section 6: Problem Set 3
 CS231A Section 6: Problem Set 3 Kevin Wong Review 6 -! 1 11/09/2012 Announcements PS3 Due 2:15pm Tuesday, Nov 13 Extra Office Hours: Friday 6 8pm Huang Common Area, Basement Level. Review 6 -! 2 Topics
CS231A Section 6: Problem Set 3 Kevin Wong Review 6 -! 1 11/09/2012 Announcements PS3 Due 2:15pm Tuesday, Nov 13 Extra Office Hours: Friday 6 8pm Huang Common Area, Basement Level. Review 6 -! 2 Topics
Today. Stereo (two view) reconstruction. Multiview geometry. Today. Multiview geometry. Computational Photography
 reconstruction. Multiview geometry. Today. Multiview geometry. Computational Photography") Computational Photography Matthias Zwicker University of Bern Fall 2009 Today From 2D to 3D using multiple views Introduction Geometry of two views Stereo matching Other applications Multiview geometry
Computational Photography Matthias Zwicker University of Bern Fall 2009 Today From 2D to 3D using multiple views Introduction Geometry of two views Stereo matching Other applications Multiview geometry
Projector Calibration for Pattern Projection Systems
 Projector Calibration for Pattern Projection Systems I. Din *1, H. Anwar 2, I. Syed 1, H. Zafar 3, L. Hasan 3 1 Department of Electronics Engineering, Incheon National University, Incheon, South Korea.
Projector Calibration for Pattern Projection Systems I. Din *1, H. Anwar 2, I. Syed 1, H. Zafar 3, L. Hasan 3 1 Department of Electronics Engineering, Incheon National University, Incheon, South Korea.
COMPUTER AND ROBOT VISION
 VOLUME COMPUTER AND ROBOT VISION Robert M. Haralick University of Washington Linda G. Shapiro University of Washington T V ADDISON-WESLEY PUBLISHING COMPANY Reading, Massachusetts Menlo Park, California
VOLUME COMPUTER AND ROBOT VISION Robert M. Haralick University of Washington Linda G. Shapiro University of Washington T V ADDISON-WESLEY PUBLISHING COMPANY Reading, Massachusetts Menlo Park, California
Other Reconstruction Techniques
 Other Reconstruction Techniques Ruigang Yang CS 684 CS 684 Spring 2004 1 Taxonomy of Range Sensing From Brain Curless, SIGGRAPH 00 Lecture notes CS 684 Spring 2004 2 Taxonomy of Range Scanning (cont.)
Other Reconstruction Techniques Ruigang Yang CS 684 CS 684 Spring 2004 1 Taxonomy of Range Sensing From Brain Curless, SIGGRAPH 00 Lecture notes CS 684 Spring 2004 2 Taxonomy of Range Scanning (cont.)
Recap: Features and filters. Recap: Grouping & fitting. Now: Multiple views 10/29/2008. Epipolar geometry & stereo vision. Why multiple views?
 Recap: Features and filters Epipolar geometry & stereo vision Tuesday, Oct 21 Kristen Grauman UT-Austin Transforming and describing images; textures, colors, edges Recap: Grouping & fitting Now: Multiple
Recap: Features and filters Epipolar geometry & stereo vision Tuesday, Oct 21 Kristen Grauman UT-Austin Transforming and describing images; textures, colors, edges Recap: Grouping & fitting Now: Multiple
Lecture 14: Basic Multi-View Geometry
 Lecture 14: Basic Multi-View Geometry Stereo If I needed to find out how far point is away from me, I could use triangulation and two views scene point image plane optical center (Graphic from Khurram
Lecture 14: Basic Multi-View Geometry Stereo If I needed to find out how far point is away from me, I could use triangulation and two views scene point image plane optical center (Graphic from Khurram
Shape Constancy and Shape Recovery: wherein Human and Computer Vision Meet
 Shape Constancy and Shape Recovery: wherein Human and Computer Vision Meet Zygmunt Pizlo Purdue University, U.S.A. Acknowledgments: Y. Li, T. Sawada, R.M. Steinman Support: NSF, US Department of Energy,
Shape Constancy and Shape Recovery: wherein Human and Computer Vision Meet Zygmunt Pizlo Purdue University, U.S.A. Acknowledgments: Y. Li, T. Sawada, R.M. Steinman Support: NSF, US Department of Energy,
Rigid ICP registration with Kinect
 Rigid ICP registration with Kinect Students: Yoni Choukroun, Elie Semmel Advisor: Yonathan Aflalo 1 Overview.p.3 Development of the project..p.3 Papers p.4 Project algorithm..p.6 Result of the whole body.p.7
Rigid ICP registration with Kinect Students: Yoni Choukroun, Elie Semmel Advisor: Yonathan Aflalo 1 Overview.p.3 Development of the project..p.3 Papers p.4 Project algorithm..p.6 Result of the whole body.p.7
ENGN2911I: 3D Photography and Geometry Processing Assignment 1: 3D Photography using Planar Shadows
 ENGN2911I: 3D Photography and Geometry Processing Assignment 1: 3D Photography using Planar Shadows Instructor: Gabriel Taubin Assignment written by: Douglas Lanman 29 January 2009 Figure 1: 3D Photography
ENGN2911I: 3D Photography and Geometry Processing Assignment 1: 3D Photography using Planar Shadows Instructor: Gabriel Taubin Assignment written by: Douglas Lanman 29 January 2009 Figure 1: 3D Photography
IMAGE-BASED RENDERING AND ANIMATION
 DH2323 DGI17 INTRODUCTION TO COMPUTER GRAPHICS AND INTERACTION IMAGE-BASED RENDERING AND ANIMATION Christopher Peters CST, KTH Royal Institute of Technology, Sweden chpeters@kth.se http://kth.academia.edu/christopheredwardpeters
DH2323 DGI17 INTRODUCTION TO COMPUTER GRAPHICS AND INTERACTION IMAGE-BASED RENDERING AND ANIMATION Christopher Peters CST, KTH Royal Institute of Technology, Sweden chpeters@kth.se http://kth.academia.edu/christopheredwardpeters
Final Exam Schedule. Final exam has been scheduled. 12:30 pm 3:00 pm, May 7. Location: INNOVA It will cover all the topics discussed in class
 Final Exam Schedule Final exam has been scheduled 12:30 pm 3:00 pm, May 7 Location: INNOVA 1400 It will cover all the topics discussed in class One page double-sided cheat sheet is allowed A calculator
Final Exam Schedule Final exam has been scheduled 12:30 pm 3:00 pm, May 7 Location: INNOVA 1400 It will cover all the topics discussed in class One page double-sided cheat sheet is allowed A calculator
Computational Perception /785
 Computational Perception 15-485/785 Assignment 5 due Tuesday, April 22 This assignment is different in character from the previous assignments you have done in that it focused entirely on your understanding
Computational Perception 15-485/785 Assignment 5 due Tuesday, April 22 This assignment is different in character from the previous assignments you have done in that it focused entirely on your understanding
CS 4495 Computer Vision Motion and Optic Flow
 CS 4495 Computer Vision Aaron Bobick School of Interactive Computing Administrivia PS4 is out, due Sunday Oct 27 th. All relevant lectures posted Details about Problem Set: You may *not* use built in Harris
CS 4495 Computer Vision Aaron Bobick School of Interactive Computing Administrivia PS4 is out, due Sunday Oct 27 th. All relevant lectures posted Details about Problem Set: You may *not* use built in Harris
Correspondence and Stereopsis. Original notes by W. Correa. Figures from [Forsyth & Ponce] and [Trucco & Verri]
![Correspondence and Stereopsis. Original notes by W. Correa. Figures from [Forsyth & Ponce] and [Trucco & Verri]](/thumbs/80/81283374.jpg "Correspondence and Stereopsis. Original notes by W. Correa. Figures from [Forsyth & Ponce] and [Trucco & Verri]") Correspondence and Stereopsis Original notes by W. Correa. Figures from [Forsyth & Ponce] and [Trucco & Verri] Introduction Disparity: Informally: difference between two pictures Allows us to gain a strong
Correspondence and Stereopsis Original notes by W. Correa. Figures from [Forsyth & Ponce] and [Trucco & Verri] Introduction Disparity: Informally: difference between two pictures Allows us to gain a strong
Image Rectification (Stereo) (New book: 7.2.1, old book: 11.1)
 (New book: 7.2.1, old book: 11.1)") Image Rectification (Stereo) (New book: 7.2.1, old book: 11.1) Guido Gerig CS 6320 Spring 2013 Credits: Prof. Mubarak Shah, Course notes modified from: http://www.cs.ucf.edu/courses/cap6411/cap5415/, Lecture
Image Rectification (Stereo) (New book: 7.2.1, old book: 11.1) Guido Gerig CS 6320 Spring 2013 Credits: Prof. Mubarak Shah, Course notes modified from: http://www.cs.ucf.edu/courses/cap6411/cap5415/, Lecture
Project 3 code & artifact due Tuesday Final project proposals due noon Wed (by ) Readings Szeliski, Chapter 10 (through 10.5)
 Readings Szeliski, Chapter 10 (through 10.5)") Announcements Project 3 code & artifact due Tuesday Final project proposals due noon Wed (by email) One-page writeup (from project web page), specifying:» Your team members» Project goals. Be specific.
Announcements Project 3 code & artifact due Tuesday Final project proposals due noon Wed (by email) One-page writeup (from project web page), specifying:» Your team members» Project goals. Be specific.
ME/CS 132: Introduction to Vision-based Robot Navigation! Low-level Image Processing" Larry Matthies"
 ME/CS 132: Introduction to Vision-based Robot Navigation! Low-level Image Processing" Larry Matthies" lhm@jpl.nasa.gov, 818-354-3722" Announcements" First homework grading is done! Second homework is due
ME/CS 132: Introduction to Vision-based Robot Navigation! Low-level Image Processing" Larry Matthies" lhm@jpl.nasa.gov, 818-354-3722" Announcements" First homework grading is done! Second homework is due
Lecture 16: Computer Vision
 CS4442/9542b: Artificial Intelligence II Prof. Olga Veksler Lecture 16: Computer Vision Motion Slides are from Steve Seitz (UW), David Jacobs (UMD) Outline Motion Estimation Motion Field Optical Flow Field
CS4442/9542b: Artificial Intelligence II Prof. Olga Veksler Lecture 16: Computer Vision Motion Slides are from Steve Seitz (UW), David Jacobs (UMD) Outline Motion Estimation Motion Field Optical Flow Field
Web site. Introduction to Computer Vision. Computer Vision. Text Book. Computer Vision. Relation to other fields
 Introduction to Computer Vision CS / ECE 181B Tuesday, March 30, 2004 Web site http://www.ece.ucsb.edu/~manj/ece181b http://www.ece.ucsb.edu/~manj/cs181b Prof. B. S. Manjunath ECE/CS Department Last Year
Introduction to Computer Vision CS / ECE 181B Tuesday, March 30, 2004 Web site http://www.ece.ucsb.edu/~manj/ece181b http://www.ece.ucsb.edu/~manj/cs181b Prof. B. S. Manjunath ECE/CS Department Last Year
Multiple View Geometry
 Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Il colore: acquisizione e visualizzazione. Lezione 20: 11 Maggio 2011
 Il colore: acquisizione e visualizzazione Lezione 20: 11 Maggio 2011 Outline The importance of color What is color? Material properties vs. unshaded color Texture building from photos Image registration
Il colore: acquisizione e visualizzazione Lezione 20: 11 Maggio 2011 Outline The importance of color What is color? Material properties vs. unshaded color Texture building from photos Image registration
Recap from Previous Lecture
 Recap from Previous Lecture Tone Mapping Preserve local contrast or detail at the expense of large scale contrast. Changing the brightness within objects or surfaces unequally leads to halos. We are now
Recap from Previous Lecture Tone Mapping Preserve local contrast or detail at the expense of large scale contrast. Changing the brightness within objects or surfaces unequally leads to halos. We are now
CSE 167: Lecture #7: Color and Shading. Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2011
 CSE 167: Introduction to Computer Graphics Lecture #7: Color and Shading Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2011 Announcements Homework project #3 due this Friday,
CSE 167: Introduction to Computer Graphics Lecture #7: Color and Shading Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2011 Announcements Homework project #3 due this Friday,
Introduction to Computer Vision. Week 8, Fall 2010 Instructor: Prof. Ko Nishino
 Introduction to Computer Vision Week 8, Fall 2010 Instructor: Prof. Ko Nishino Midterm Project 2 without radial distortion correction with radial distortion correction Light Light Light! How do you recover
Introduction to Computer Vision Week 8, Fall 2010 Instructor: Prof. Ko Nishino Midterm Project 2 without radial distortion correction with radial distortion correction Light Light Light! How do you recover
Image Processing, Analysis and Machine Vision
 Image Processing, Analysis and Machine Vision Milan Sonka PhD University of Iowa Iowa City, USA Vaclav Hlavac PhD Czech Technical University Prague, Czech Republic and Roger Boyle DPhil, MBCS, CEng University
Image Processing, Analysis and Machine Vision Milan Sonka PhD University of Iowa Iowa City, USA Vaclav Hlavac PhD Czech Technical University Prague, Czech Republic and Roger Boyle DPhil, MBCS, CEng University
Think-Pair-Share. What visual or physiological cues help us to perceive 3D shape and depth?
 Think-Pair-Share What visual or physiological cues help us to perceive 3D shape and depth? [Figure from Prados & Faugeras 2006] Shading Focus/defocus Images from same point of view, different camera parameters
Think-Pair-Share What visual or physiological cues help us to perceive 3D shape and depth? [Figure from Prados & Faugeras 2006] Shading Focus/defocus Images from same point of view, different camera parameters
Notes 9: Optical Flow
 Course 049064: Variational Methods in Image Processing Notes 9: Optical Flow Guy Gilboa 1 Basic Model 1.1 Background Optical flow is a fundamental problem in computer vision. The general goal is to find
Course 049064: Variational Methods in Image Processing Notes 9: Optical Flow Guy Gilboa 1 Basic Model 1.1 Background Optical flow is a fundamental problem in computer vision. The general goal is to find
Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision
 Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision What Happened Last Time? Human 3D perception (3D cinema) Computational stereo Intuitive explanation of what is meant by disparity Stereo matching
Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision What Happened Last Time? Human 3D perception (3D cinema) Computational stereo Intuitive explanation of what is meant by disparity Stereo matching
Information page for written examinations at Linköping University TER2
 Information page for written examinations at Linköping University Examination date 2016-08-19 Room (1) TER2 Time 8-12 Course code Exam code Course name Exam name Department Number of questions in the examination
Information page for written examinations at Linköping University Examination date 2016-08-19 Room (1) TER2 Time 8-12 Course code Exam code Course name Exam name Department Number of questions in the examination
All good things must...
 Lecture 17 Final Review All good things must... UW CSE vision faculty Course Grading Programming Projects (80%) Image scissors (20%) -DONE! Panoramas (20%) - DONE! Content-based image retrieval (20%) -
Lecture 17 Final Review All good things must... UW CSE vision faculty Course Grading Programming Projects (80%) Image scissors (20%) -DONE! Panoramas (20%) - DONE! Content-based image retrieval (20%) -