Tangent & normal vectors The arc-length parameterization of a 2D curve The curvature of a 2D curve
|
|
|
- Primrose Hines
- 6 years ago
- Views:
Transcription
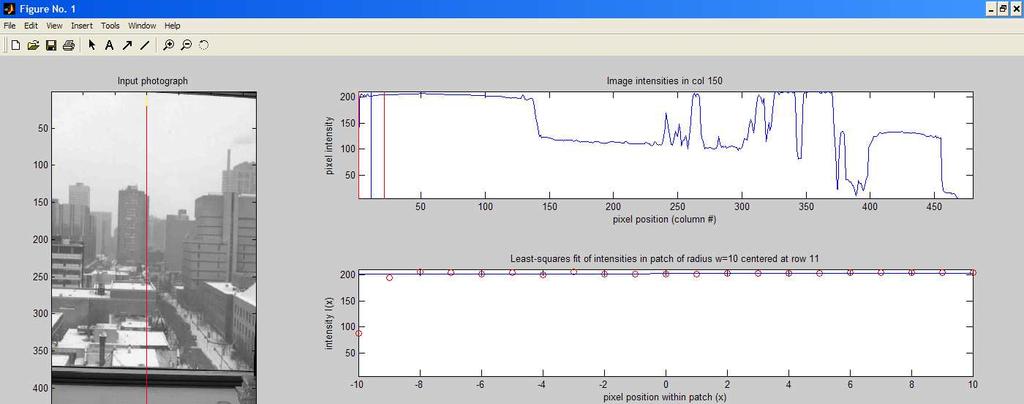
1 Local Analysis of 2D Curve Patches
2 Topic 4.2: Local analysis of 2D curve patches Representing 2D image curves Estimating differential properties of 2D curves Tangent & normal vectors The arc-length parameterization of a 2D curve The curvature of a 2D curve
3 Local Analysis of Image Patches: Outline As graph in 2D As curve in 2D As surface in 3D
4 Local Analysis of Image Patches: Outline As graph in 2D As curve in 2D As surface in 3D
5 Estimating Intensities & their Derivatives Don t go, or you ll miss out!
6 Estimating Intensities & their Derivatives Don t go, or you ll miss out!
7 Representing & Analysing2D Curves, why? Useful representation for: Object boundaries Isophoteregions (groups of pixels with the same intensity)
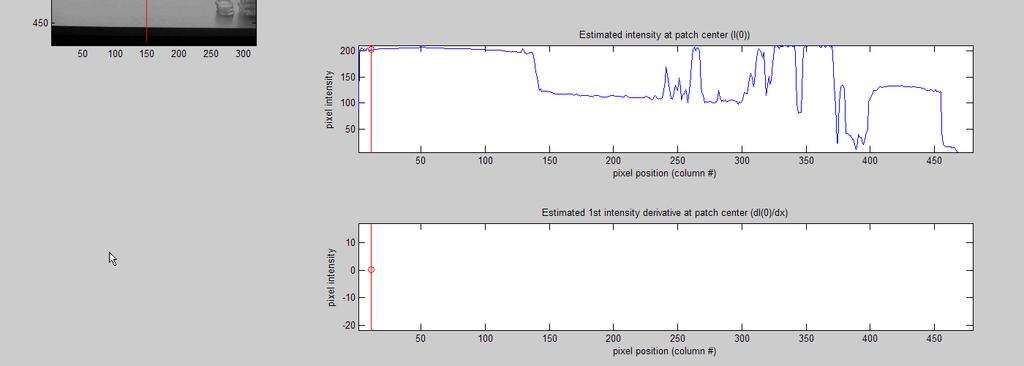
8 Representing & Analysing2D Curves, how? Math is our friend: Provides an unambiguous representation Enables computation of useful properties
9 2D Image Curves: Definition A parametric 2D curve is a continuous mapping γ: (a,b) -> R 2 where t -> (x(t), y(t))
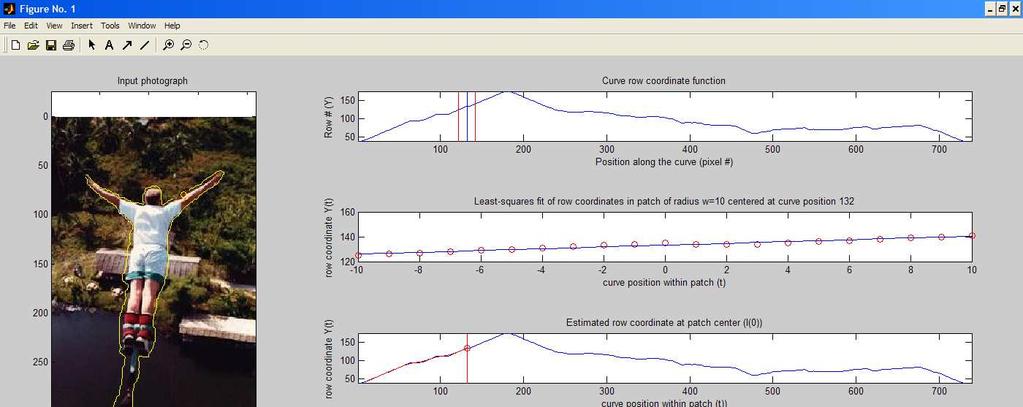
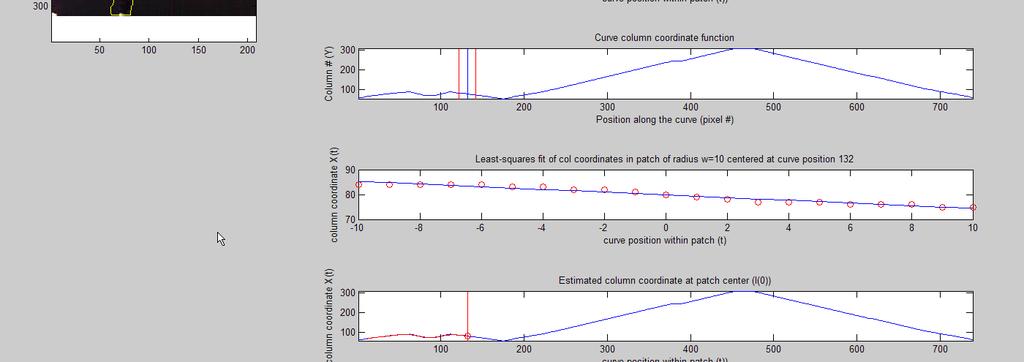
10 2D Image Curves: Definition Example: a boundary curve t = pixel # along the boundary x(t) = x coordinate of the t th pixel y(t) = y coordinate of the t th pixel
11 2D Image Curves: Definition To fully describe a curve we need the two functions x(t)and y(t), called the Coordinate Functions.
12 2D Image Curves: Definition A closed2d curve is a continuous mapping γ: (a,b) -> R 2 where t -> (x(t), y(t)) such that (x(a), y(a)) = (x(b), y(b)).
13 Smooth 2D Curves A curve is smooth when...
14 Smooth 2D Curves A curve is smooth when all the derivatives of the Coordinate Functions exist
15 Derivatives of the Coordinate Functions The 1 st and 2 nd derivatives of x(t), y(t) are extremely informativeabout the shape of a curve.
16 Topic 4.2: Local analysis of 2D curve patches Representing 2D image curves Estimating differential properties of 2D curves Tangent & normal vectors The arc-length parameterization of a 2D curve The curvature of a 2D curve
17 The Tangent Vector Notation: γ(t) = (x(t), y(t)) γ(t) maps a number (t) to a 2D point (x(t), y(t)). This type of function is called a vector-valued function.
18 The Tangent Vector γ(t) Suppose we know γ(0). γ(0) = (x(0), y(0)) How can we approximate γ(t)?
19 The Tangent Vector γ(t) Suppose we know γ(0). γ(0) = (x(0), y(0)) How can we approximate γ(t)? hint?
20 The Tangent Vector γ(t) Suppose we know γ(0). γ(0) = (x(0), y(0)) How can we approximate γ(t)? Using the derivative (tangent)!
21 The Tangent Vector γ(t) Suppose we know γ(0). γ(0) = (x(0), y(0)) How can we approximate γ(t)? Using the derivative (tangent)!
22 The Tangent Vector γ(t) Prediction of γ(t) γ(0) = (x(0), y(0)) Good! But not great. Can we do any better? If so, how?
23 The Tangent Vector γ(t) Prediction of γ(t) γ(0) = (x(0), y(0)) Good! But not great. Add more information about the curve, like the 2 nd, 3 rd, or the n th derivative! Familiar?
24 The Tangent Vector γ(t) Prediction of γ(t) γ(0) = (x(0), y(0)) Good! But not great. Add more information about the curve, like the 2 nd, 3 rd, or the n th derivative! This is a Taylor-Series approximation
25 The Tangent Vector γ(t) Formally: the 1 st order Taylor-Series approximation to γ(t) near γ(0) is:, so γ(0)= (x(0), y(0))
26 The Tangent Vector γ(t) γ(0) Definition. The tangent vector at γ(t) is equal to the first derivative of the function, at that point. In this case: 1 st order Taylor- Series approximation of γ(t) at t=0
27 The Tangent Vector γ(t) γ(0) In general, the derivative of a vector valued function is the derivative of the n coordinate functions, so if The derivative of f at (t) is:
28 Effect of Curve Parameter on the Tangent We can parameterize a curve γin (infinitely) many different ways, for instance: 1. Make t the number of pixels between γ(0) and γ(t) 2. Make t the actual length of the curve between γ(0) and γ(t), in meters (or inches, or light-years).
29 Effect of Curve Parameter on the Tangent We can parameterize a curve γin (infinitely) many different ways, for instance: 1. Make t the number of pixels between γ(0) and γ(t) 2. Make t the actual length of the curve between γ(0) and γ(t), in meters (or inches, or light-years). But the key property is that the direction of the tangent remains unchanged, regardless of the scale of the parameter.
30 Effect of Curve Parameter on the Tangent The direction of the tangent remains unchanged, regardless of the scale of the parameter. Really? Can we prove it?
31 Effect of Curve Parameter on the Tangent Proof: Let s parameterize the curve γ in two ways: 1. Take t = the number of pixels between γ(0) and γ(t) 2. Take s = f(t) as the parameter, wheref(t) is simply any differentiable function.
32 Effect of Curve Parameter on the Tangent Proof: Let s parameterize the curve γ in two ways: 1. Take t = the number of pixels between γ(0) and γ(t) 2. Take s = f(t) as the parameter, wheref(t) is simply any differentiable function. In 1, we know the derivative of γ is simply
33 Effect of Curve Parameter on the Tangent Proof: Let s parameterize the curve γ in two ways: 1. Take t = the number of pixels between γ(0) and γ(t) 2. Take s = f(t) as the parameter, wheref(t) is simply any differentiable function. In 1, we know the derivative of γ is simply In 2, the chain rule tells us that if s=f(t) and γ(s) then: which correspond to
34 Effect of Curve Parameter on the Tangent Proof: Let s parameterize the curve γ in two ways: 1. Take t = the number of pixels between γ(0) and γ(t) 2. Take s = f(t) as the parameter, wheref(t) is simply any differentiable function. In 1, we know the derivative of γis simply In 2, the chain rule tells us that if s=f(t) and γ(s) then:
35 The Unit Tangent Vector Definition. The Unit Tangent is: The unit tangent vector does not depend on the choice of the parameter t
36 The Arc-Length of a Curve How can we approximate the length of a curve?
37 The Arc-Length of a Curve
38 The Arc-Length of a Curve Take small enough steps (of size t) and add!
39 The Arc-Length of a Curve Take small enough steps (of size t) and add!
40 The Arc-Length of a Curve
41 The Arc-Length of a Curve This is called a piece-wise-linear length approximation. And what if we make the steps smaller and smaller? t-> 0
42 The Arc-Length of a Curve Then we get the following definition! The arc-length s(t) of the curve γ(t) is given by:
43 The Arc-Length of a Curve For example, lets think about the circle What do we expect
44 The Arc-Length of a Curve For example, lets think about the circle Proportional to the radius and the number of pixels in the circle
45 The Arc-Length of a Curve Example: The arc length of a circle with radius r, whose curve equation can be written as: γ(t) = r ( cos(t), sin(t) ) then so unit vectors
46 The Arc-Length of a Curve Example: The arc length of a circle with radius r, whose curve equation can be written as: γ(t) = r ( cos(t), sin(t) ) Now, substituting on the definition, we get:
47 The Arc-Length of a Curve Example: The arc length of a circle with radius r, whose curve equation can be written as: γ(t) = r ( cos(t), sin(t) ) Now, substituting on the definition, we get: Proportional to the radius yes! Proportional to the number of pixels in the circle yes!
48 The Arc-Length of a Curve Now, can we parameterize the function γ(t) using the arc-length function itself?
49 The Arc-Length of a Curve Now, can we parameterize the function γ(t) using the arc-length function itself? Yes!
50 The Arc-Length of a Curve Now, can we parameterize the function γ(t) using the arc-length function itself? Yes! A parameterization γ(s) where the curve parameter is the arclength is (thoughtfully and originally) named the arc-length parameterization.
51 The Arc-Length of a Curve Now, can we parameterize the function γ(t) using the arc-length function itself? Yes! Lets use the circle again as an example. We know that the arclength of a circle is s(t) = rt, or for short s = rt. Which means that, so the arc-length parameterization is:
52 The Arc-Length of a Curve Arc-length parameterization of the circle. Using γ(s) = the following holds: γ(t) = (x(t), y(t)) t
53 The Arc-Length of a Curve Now, we know that the arc-length is We also know that an arc-length parameterization γ(s) is one where the curve parameter is the arc-length Knowing these two facts, a property we can derive is that γ(s) is an arc-length parameterization of a curve if and only if
54 The Arc-Length of a Curve γ(s) is an arc-length parameterization of a curve if and only if
55 The Arc-Length of a Curve γ(s) is an arc-length parameterization of a curve if and only if This is a very useful property of arc-length parameterized curves, because the tangent -estimated as the derivative of the curve-is always a unit-tangent!
56 The Unit Normal Vector Let s look at the normal vector now
57 The Unit Normal Vector Today we learnt that the unit tangent is How do we estimate the Unit Normal?
58 The Unit Normal Vector Today we learnt that the unit tangent is As the orthogonal vector to T(t). As the orthogonal vector to T(t). The (unit) normal vector N(t) is the counter-clockwise rotation of T(t) by 90 degrees.
59 The Unit Normal Vector Today we learnt that the unit tangent is As the orthogonal vector to T(t). As the orthogonal vector to T(t). The (unit) normal vector N(t) is the counter-clockwise rotation of T(t) by 90 degrees.
60 The Unit Normal Vector Aside: what are orthogonal vectors? Vectors aand bare orthogonal if and only if their dot product is zero. So if a= [a x, a y ], and b= [b x, b y ], then a and bare orthogonal if and only if: a x a y b x = a x b x + a y b y = 0 b y
61 The Moving Frame Putting the unit Tangent and the unit Normal together we get: The Moving Frame, defined as the pair of orthogonal vectors {T(t), N(t)}
62 The Moving Frame For example, the circle
63 The Moving Frame Noteworthy: 1. As we change the parameter t, the moving frame rotates 2. The fasterthe frame rotates, the more curved the curve is 3. The speed at which the moving frame is rotating can be estimated using a 1 st order Taylor-series near t=0.
64 Topic 4.2: Local analysis of 2D curve patches Representing 2D image curves Estimating differential properties of 2D curves Tangent & normal vectors The arc-length parameterization of a 2D curve The curvature of a 2D curve
65 Arc-Length Parameterization: T(s) & N(s) We know that: The unit tangent is: And that the unit normal is the 90-deg counter-clockwise rotation: Note that we use s as the parameter to denote arc-length parameterizations. And we arc-length parameterizations because the expressions are simpler (see last slide of this lecture for comparison).
66 Defining the Curvature at a Point Theorem. Definition of curvature. If s is the arc-length of a curve, then
67 Defining the Curvature at a Point The traditional way of writing the 1 st order Taylor approximation of the moving frame is: But if we use the curvature k(s), it becomes
68 Defining the Curvature at a Point The 1 st order Taylor-series approximation becomes:
69 Defining the Curvature at a Point The 1 st order Taylor-series approximation becomes:
70 Defining the Curvature at a Point The 1 st order Taylor-series approximation becomes:
71 Defining the Curvature at a Point The 1 st order Taylor-series approximation becomes:
72 Defining the Curvature at a Point The 1 st order Taylor-series approximation becomes:
73 Defining the Curvature at a Point The 1 st order Taylor-series approximation becomes:
74 Defining the Curvature at a Point The 1 st order Taylor-series approximation becomes:
75 Defining the Curvature at a Point The 1 st order Taylor-series approximation becomes:
76 Defining the Curvature at a Point The 1 st order Taylor-series approximation becomes: And the scaling constant is k(s)
77 Defining the Curvature at a Point The 1 st order Taylor-series approximation becomes: And the scaling constant is k(s) What is this constant saying?
78 Defining the Curvature at a Point The 1 st order Taylor-series approximation becomes: And the scaling constant is k(s) What is this constant saying? How much of the Normaldo we need to add to the Tangent T(0) to approximate the tangent at T(t).
79 Interpreting the Sign of the Curvature k(s)
80 Interpreting the Absolute Value of k(s) What is the intuition of the above equation then? The equation is saying, look we can approximate γ(s) (by approximating the Tangent and the Normal) using a circle that: passes through γ(0), is tangent to T(0),and passes through γ(s)
81 The Arc-Length Parameterization & k(s) Example: the curvature of a circle of radius r. Parametric equation: g(t) = r (cost, sin t). Arc-length parameterization First derivative Second derivative
82 The Circle of Curvature k(s)


83 k(t) for Non-Arc-Length Parameterizations
Math 32, August 20: Review & Parametric Equations
 Math 3, August 0: Review & Parametric Equations Section 1: Review This course will continue the development of the Calculus tools started in Math 30 and Math 31. The primary difference between this course
Math 3, August 0: Review & Parametric Equations Section 1: Review This course will continue the development of the Calculus tools started in Math 30 and Math 31. The primary difference between this course
Updated: August 24, 2016 Calculus III Section Math 232. Calculus III. Brian Veitch Fall 2015 Northern Illinois University
 Updated: August 24, 216 Calculus III Section 1.2 Math 232 Calculus III Brian Veitch Fall 215 Northern Illinois University 1.2 Calculus with Parametric Curves Definition 1: First Derivative of a Parametric
Updated: August 24, 216 Calculus III Section 1.2 Math 232 Calculus III Brian Veitch Fall 215 Northern Illinois University 1.2 Calculus with Parametric Curves Definition 1: First Derivative of a Parametric
Lecture 15. Lecturer: Prof. Sergei Fedotov Calculus and Vectors. Length of a Curve and Parametric Equations
 Lecture 15 Lecturer: Prof. Sergei Fedotov 10131 - Calculus and Vectors Length of a Curve and Parametric Equations Sergei Fedotov (University of Manchester) MATH10131 2011 1 / 5 Lecture 15 1 Length of a
Lecture 15 Lecturer: Prof. Sergei Fedotov 10131 - Calculus and Vectors Length of a Curve and Parametric Equations Sergei Fedotov (University of Manchester) MATH10131 2011 1 / 5 Lecture 15 1 Length of a
Topic 5.1: Line Elements and Scalar Line Integrals. Textbook: Section 16.2
 Topic 5.1: Line Elements and Scalar Line Integrals Textbook: Section 16.2 Warm-Up: Derivatives of Vector Functions Suppose r(t) = x(t) î + y(t) ĵ + z(t) ˆk parameterizes a curve C. The vector: is: r (t)
Topic 5.1: Line Elements and Scalar Line Integrals Textbook: Section 16.2 Warm-Up: Derivatives of Vector Functions Suppose r(t) = x(t) î + y(t) ĵ + z(t) ˆk parameterizes a curve C. The vector: is: r (t)
Curvature. Corners. curvature of a straight segment is zero more bending = larger curvature
 Curvature curvature of a straight segment is zero more bending = larger curvature Corners corner defined by large curvature value (e.g., a local maxima) borders (i.e., edges in gray-level pictures) can
Curvature curvature of a straight segment is zero more bending = larger curvature Corners corner defined by large curvature value (e.g., a local maxima) borders (i.e., edges in gray-level pictures) can
Goals: Course Unit: Describing Moving Objects Different Ways of Representing Functions Vector-valued Functions, or Parametric Curves
 Block #1: Vector-Valued Functions Goals: Course Unit: Describing Moving Objects Different Ways of Representing Functions Vector-valued Functions, or Parametric Curves 1 The Calculus of Moving Objects Problem.
Block #1: Vector-Valued Functions Goals: Course Unit: Describing Moving Objects Different Ways of Representing Functions Vector-valued Functions, or Parametric Curves 1 The Calculus of Moving Objects Problem.
Here are some of the more basic curves that we ll need to know how to do as well as limits on the parameter if they are required.
 1 of 10 23/07/2016 05:15 Paul's Online Math Notes Calculus III (Notes) / Line Integrals / Line Integrals - Part I Problems] [Notes] [Practice Problems] [Assignment Calculus III - Notes Line Integrals Part
1 of 10 23/07/2016 05:15 Paul's Online Math Notes Calculus III (Notes) / Line Integrals / Line Integrals - Part I Problems] [Notes] [Practice Problems] [Assignment Calculus III - Notes Line Integrals Part
t dt ds Then, in the last class, we showed that F(s) = <2s/3, 1 2s/3, s/3> is arclength parametrization. Therefore,
 = <2s/3, 1 2s/3, s/3> is arclength parametrization. Therefore,") 13.4. Curvature Curvature Let F(t) be a vector values function. We say it is regular if F (t)=0 Let F(t) be a vector valued function which is arclength parametrized, which means F t 1 for all t. Then,
13.4. Curvature Curvature Let F(t) be a vector values function. We say it is regular if F (t)=0 Let F(t) be a vector valued function which is arclength parametrized, which means F t 1 for all t. Then,
Math 348 Differential Geometry of Curves and Surfaces
 Math 348 Differential Geometry of Curves and Surfaces Lecture 3 Curves in Calculus Xinwei Yu Sept. 12, 2017 CAB 527, xinwei2@ualberta.ca Department of Mathematical & Statistical Sciences University of
Math 348 Differential Geometry of Curves and Surfaces Lecture 3 Curves in Calculus Xinwei Yu Sept. 12, 2017 CAB 527, xinwei2@ualberta.ca Department of Mathematical & Statistical Sciences University of
Directional Derivatives and the Gradient Vector Part 2
 Directional Derivatives and the Gradient Vector Part 2 Lecture 25 February 28, 2007 Recall Fact Recall Fact If f is a dierentiable function of x and y, then f has a directional derivative in the direction
Directional Derivatives and the Gradient Vector Part 2 Lecture 25 February 28, 2007 Recall Fact Recall Fact If f is a dierentiable function of x and y, then f has a directional derivative in the direction
Background for Surface Integration
 Background for urface Integration 1 urface Integrals We have seen in previous work how to define and compute line integrals in R 2. You should remember the basic surface integrals that we will need to
Background for urface Integration 1 urface Integrals We have seen in previous work how to define and compute line integrals in R 2. You should remember the basic surface integrals that we will need to
Kevin James. MTHSC 206 Section 15.6 Directional Derivatives and the Gra
 MTHSC 206 Section 15.6 Directional Derivatives and the Gradient Vector Definition We define the directional derivative of the function f (x, y) at the point (x 0, y 0 ) in the direction of the unit vector
MTHSC 206 Section 15.6 Directional Derivatives and the Gradient Vector Definition We define the directional derivative of the function f (x, y) at the point (x 0, y 0 ) in the direction of the unit vector
Review 1. Richard Koch. April 23, 2005
 Review Richard Koch April 3, 5 Curves From the chapter on curves, you should know. the formula for arc length in section.;. the definition of T (s), κ(s), N(s), B(s) in section.4. 3. the fact that κ =
Review Richard Koch April 3, 5 Curves From the chapter on curves, you should know. the formula for arc length in section.;. the definition of T (s), κ(s), N(s), B(s) in section.4. 3. the fact that κ =
ds dt ds 1 dt 1 dt v v v dt ds and the normal vector is given by N
 Normal Vectors and Curvature In the last section, we stated that reparameterization by arc length would help us analyze the twisting and turning of a curve. In this section, we ll see precisely how to
Normal Vectors and Curvature In the last section, we stated that reparameterization by arc length would help us analyze the twisting and turning of a curve. In this section, we ll see precisely how to
Let be a function. We say, is a plane curve given by the. Let a curve be given by function where is differentiable with continuous.
 Module 8 : Applications of Integration - II Lecture 22 : Arc Length of a Plane Curve [Section 221] Objectives In this section you will learn the following : How to find the length of a plane curve 221
Module 8 : Applications of Integration - II Lecture 22 : Arc Length of a Plane Curve [Section 221] Objectives In this section you will learn the following : How to find the length of a plane curve 221
Inverse and Implicit functions
 CHAPTER 3 Inverse and Implicit functions. Inverse Functions and Coordinate Changes Let U R d be a domain. Theorem. (Inverse function theorem). If ϕ : U R d is differentiable at a and Dϕ a is invertible,
CHAPTER 3 Inverse and Implicit functions. Inverse Functions and Coordinate Changes Let U R d be a domain. Theorem. (Inverse function theorem). If ϕ : U R d is differentiable at a and Dϕ a is invertible,
Directional Derivatives. Directional Derivatives. Directional Derivatives. Directional Derivatives. Directional Derivatives. Directional Derivatives
 Recall that if z = f(x, y), then the partial derivatives f x and f y are defined as and represent the rates of change of z in the x- and y-directions, that is, in the directions of the unit vectors i and
Recall that if z = f(x, y), then the partial derivatives f x and f y are defined as and represent the rates of change of z in the x- and y-directions, that is, in the directions of the unit vectors i and
f xx (x, y) = 6 + 6x f xy (x, y) = 0 f yy (x, y) = y In general, the quantity that we re interested in is
 = 6 + 6x f xy (x, y) = 0 f yy (x, y) = y In general, the quantity that we re interested in is") 1. Let f(x, y) = 5 + 3x 2 + 3y 2 + 2y 3 + x 3. (a) Final all critical points of f. (b) Use the second derivatives test to classify the critical points you found in (a) as a local maximum, local minimum,
1. Let f(x, y) = 5 + 3x 2 + 3y 2 + 2y 3 + x 3. (a) Final all critical points of f. (b) Use the second derivatives test to classify the critical points you found in (a) as a local maximum, local minimum,
Math 213 Calculus III Practice Exam 2 Solutions Fall 2002
 Math 13 Calculus III Practice Exam Solutions Fall 00 1. Let g(x, y, z) = e (x+y) + z (x + y). (a) What is the instantaneous rate of change of g at the point (,, 1) in the direction of the origin? We want
Math 13 Calculus III Practice Exam Solutions Fall 00 1. Let g(x, y, z) = e (x+y) + z (x + y). (a) What is the instantaneous rate of change of g at the point (,, 1) in the direction of the origin? We want
Directional Derivatives and the Gradient Vector Part 2
 Directional Derivatives and the Gradient Vector Part 2 Marius Ionescu October 26, 2012 Marius Ionescu () Directional Derivatives and the Gradient Vector Part October 2 26, 2012 1 / 12 Recall Fact Marius
Directional Derivatives and the Gradient Vector Part 2 Marius Ionescu October 26, 2012 Marius Ionescu () Directional Derivatives and the Gradient Vector Part October 2 26, 2012 1 / 12 Recall Fact Marius
MATH11007 NOTES 12: PARAMETRIC CURVES, ARCLENGTH ETC.
 MATH117 NOTES 12: PARAMETRIC CURVES, ARCLENGTH ETC. 1. Parametric representation of curves The position of a particle moving in three-dimensional space is often specified by an equation of the form For
MATH117 NOTES 12: PARAMETRIC CURVES, ARCLENGTH ETC. 1. Parametric representation of curves The position of a particle moving in three-dimensional space is often specified by an equation of the form For
. Tutorial Class V 3-10/10/2012 First Order Partial Derivatives;...
 Tutorial Class V 3-10/10/2012 1 First Order Partial Derivatives; Tutorial Class V 3-10/10/2012 1 First Order Partial Derivatives; 2 Application of Gradient; Tutorial Class V 3-10/10/2012 1 First Order
Tutorial Class V 3-10/10/2012 1 First Order Partial Derivatives; Tutorial Class V 3-10/10/2012 1 First Order Partial Derivatives; 2 Application of Gradient; Tutorial Class V 3-10/10/2012 1 First Order
CS123 INTRODUCTION TO COMPUTER GRAPHICS. Describing Shapes. Constructing Objects in Computer Graphics 1/15
 Describing Shapes Constructing Objects in Computer Graphics 1/15 2D Object Definition (1/3) Lines and polylines: Polylines: lines drawn between ordered points A closed polyline is a polygon, a simple polygon
Describing Shapes Constructing Objects in Computer Graphics 1/15 2D Object Definition (1/3) Lines and polylines: Polylines: lines drawn between ordered points A closed polyline is a polygon, a simple polygon
MATH11007 NOTES 15: PARAMETRIC CURVES, ARCLENGTH ETC.
 MATH117 NOTES 15: PARAMETRIC CURVES, ARCLENGTH ETC. 1. Parametric representation of curves The position of a particle moving in three-dimensional space is often specified by an equation of the form For
MATH117 NOTES 15: PARAMETRIC CURVES, ARCLENGTH ETC. 1. Parametric representation of curves The position of a particle moving in three-dimensional space is often specified by an equation of the form For
Math 5BI: Problem Set 2 The Chain Rule
 Math 5BI: Problem Set 2 The Chain Rule April 5, 2010 A Functions of two variables Suppose that γ(t) = (x(t), y(t), z(t)) is a differentiable parametrized curve in R 3 which lies on the surface S defined
Math 5BI: Problem Set 2 The Chain Rule April 5, 2010 A Functions of two variables Suppose that γ(t) = (x(t), y(t), z(t)) is a differentiable parametrized curve in R 3 which lies on the surface S defined
Lecture 6: Chain rule, Mean Value Theorem, Tangent Plane
 Lecture 6: Chain rule, Mean Value Theorem, Tangent Plane Rafikul Alam Department of Mathematics IIT Guwahati Chain rule Theorem-A: Let x : R R n be differentiable at t 0 and f : R n R be differentiable
Lecture 6: Chain rule, Mean Value Theorem, Tangent Plane Rafikul Alam Department of Mathematics IIT Guwahati Chain rule Theorem-A: Let x : R R n be differentiable at t 0 and f : R n R be differentiable
CS337 INTRODUCTION TO COMPUTER GRAPHICS. Describing Shapes. Constructing Objects in Computer Graphics. Bin Sheng Representing Shape 9/20/16 1/15
 Describing Shapes Constructing Objects in Computer Graphics 1/15 2D Object Definition (1/3) Lines and polylines: Polylines: lines drawn between ordered points A closed polyline is a polygon, a simple polygon
Describing Shapes Constructing Objects in Computer Graphics 1/15 2D Object Definition (1/3) Lines and polylines: Polylines: lines drawn between ordered points A closed polyline is a polygon, a simple polygon
INTRODUCTION TO LINE INTEGRALS
 INTRODUTION TO LINE INTEGRALS PROF. MIHAEL VANVALKENBURGH Last week we discussed triple integrals. This week we will study a new topic of great importance in mathematics and physics: line integrals. 1.
INTRODUTION TO LINE INTEGRALS PROF. MIHAEL VANVALKENBURGH Last week we discussed triple integrals. This week we will study a new topic of great importance in mathematics and physics: line integrals. 1.
Shape Modeling and Geometry Processing
 252-0538-00L, Spring 2018 Shape Modeling and Geometry Processing Discrete Differential Geometry Differential Geometry Motivation Formalize geometric properties of shapes Roi Poranne # 2 Differential Geometry
252-0538-00L, Spring 2018 Shape Modeling and Geometry Processing Discrete Differential Geometry Differential Geometry Motivation Formalize geometric properties of shapes Roi Poranne # 2 Differential Geometry
Measuring Lengths The First Fundamental Form
 Differential Geometry Lia Vas Measuring Lengths The First Fundamental Form Patching up the Coordinate Patches. Recall that a proper coordinate patch of a surface is given by parametric equations x = (x(u,
Differential Geometry Lia Vas Measuring Lengths The First Fundamental Form Patching up the Coordinate Patches. Recall that a proper coordinate patch of a surface is given by parametric equations x = (x(u,
14.6 Directional Derivatives and the Gradient Vector
 14 Partial Derivatives 14.6 and the Gradient Vector Copyright Cengage Learning. All rights reserved. Copyright Cengage Learning. All rights reserved. and the Gradient Vector In this section we introduce
14 Partial Derivatives 14.6 and the Gradient Vector Copyright Cengage Learning. All rights reserved. Copyright Cengage Learning. All rights reserved. and the Gradient Vector In this section we introduce
Let and be a differentiable function. Let Then be the level surface given by
 Module 12 : Total differential, Tangent planes and normals Lecture 35 : Tangent plane and normal [Section 35.1] > Objectives In this section you will learn the following : The notion tangent plane to a
Module 12 : Total differential, Tangent planes and normals Lecture 35 : Tangent plane and normal [Section 35.1] > Objectives In this section you will learn the following : The notion tangent plane to a
Shape Modeling. Differential Geometry Primer Smooth Definitions Discrete Theory in a Nutshell. CS 523: Computer Graphics, Spring 2011
 CS 523: Computer Graphics, Spring 2011 Shape Modeling Differential Geometry Primer Smooth Definitions Discrete Theory in a Nutshell 2/15/2011 1 Motivation Geometry processing: understand geometric characteristics,
CS 523: Computer Graphics, Spring 2011 Shape Modeling Differential Geometry Primer Smooth Definitions Discrete Theory in a Nutshell 2/15/2011 1 Motivation Geometry processing: understand geometric characteristics,
Lectures 19: The Gauss-Bonnet Theorem I. Table of contents
 Math 348 Fall 07 Lectures 9: The Gauss-Bonnet Theorem I Disclaimer. As we have a textbook, this lecture note is for guidance and supplement only. It should not be relied on when preparing for exams. In
Math 348 Fall 07 Lectures 9: The Gauss-Bonnet Theorem I Disclaimer. As we have a textbook, this lecture note is for guidance and supplement only. It should not be relied on when preparing for exams. In
Lecture 15: Segmentation (Edge Based, Hough Transform)
") Lecture 15: Segmentation (Edge Based, Hough Transform) c Bryan S. Morse, Brigham Young University, 1998 000 Last modified on February 3, 000 at :00 PM Contents 15.1 Introduction..............................................
Lecture 15: Segmentation (Edge Based, Hough Transform) c Bryan S. Morse, Brigham Young University, 1998 000 Last modified on February 3, 000 at :00 PM Contents 15.1 Introduction..............................................
Geometric Primitives. Chapter 5
 Chapter 5 Geometric Primitives In this chapter, we discuss the basic geometric primitives we will use to represent the world in which our graphic objects live. As discussed at the beginning of this class,
Chapter 5 Geometric Primitives In this chapter, we discuss the basic geometric primitives we will use to represent the world in which our graphic objects live. As discussed at the beginning of this class,
Dr. Allen Back. Nov. 21, 2014
 Dr. Allen Back of Nov. 21, 2014 The most important thing you should know (e.g. for exams and homework) is how to setup (and perhaps compute if not too hard) surface integrals, triple integrals, etc. But
Dr. Allen Back of Nov. 21, 2014 The most important thing you should know (e.g. for exams and homework) is how to setup (and perhaps compute if not too hard) surface integrals, triple integrals, etc. But
PARAMETRIC EQUATIONS AND POLAR COORDINATES
 9 ARAMETRIC EQUATIONS AND OLAR COORDINATES So far we have described plane curves b giving as a function of f or as a function of t or b giving a relation between and that defines implicitl as a function
9 ARAMETRIC EQUATIONS AND OLAR COORDINATES So far we have described plane curves b giving as a function of f or as a function of t or b giving a relation between and that defines implicitl as a function
(Discrete) Differential Geometry
 Differential Geometry") (Discrete) Differential Geometry Motivation Understand the structure of the surface Properties: smoothness, curviness, important directions How to modify the surface to change these properties What properties
(Discrete) Differential Geometry Motivation Understand the structure of the surface Properties: smoothness, curviness, important directions How to modify the surface to change these properties What properties
Solution 2. ((3)(1) (2)(1), (4 3), (4)(2) (3)(3)) = (1, 1, 1) D u (f) = (6x + 2yz, 2y + 2xz, 2xy) (0,1,1) = = 4 14
(1) (2)(1), (4 3), (4)(2) (3)(3)) = (1, 1, 1) D u (f) = (6x + 2yz, 2y + 2xz, 2xy) (0,1,1) = = 4 14") Vector and Multivariable Calculus L Marizza A Bailey Practice Trimester Final Exam Name: Problem 1. To prepare for true/false and multiple choice: Compute the following (a) (4, 3) ( 3, 2) Solution 1. (4)(
Vector and Multivariable Calculus L Marizza A Bailey Practice Trimester Final Exam Name: Problem 1. To prepare for true/false and multiple choice: Compute the following (a) (4, 3) ( 3, 2) Solution 1. (4)(
6. Find the equation of the plane that passes through the point (-1,2,1) and contains the line x = y = z.
 and contains the line x = y = z.") Week 1 Worksheet Sections from Thomas 13 th edition: 12.4, 12.5, 12.6, 13.1 1. A plane is a set of points that satisfies an equation of the form c 1 x + c 2 y + c 3 z = c 4. (a) Find any three distinct
Week 1 Worksheet Sections from Thomas 13 th edition: 12.4, 12.5, 12.6, 13.1 1. A plane is a set of points that satisfies an equation of the form c 1 x + c 2 y + c 3 z = c 4. (a) Find any three distinct
What you will learn today
 What you will learn today Tangent Planes and Linear Approximation and the Gradient Vector Vector Functions 1/21 Recall in one-variable calculus, as we zoom in toward a point on a curve, the graph becomes
What you will learn today Tangent Planes and Linear Approximation and the Gradient Vector Vector Functions 1/21 Recall in one-variable calculus, as we zoom in toward a point on a curve, the graph becomes
Lecture 11 Differentiable Parametric Curves
 Lecture 11 Differentiable Parametric Curves 11.1 Definitions and Examples. 11.1.1 Definition. A differentiable parametric curve in R n of class C k (k 1) is a C k map t α(t) = (α 1 (t),..., α n (t)) of
Lecture 11 Differentiable Parametric Curves 11.1 Definitions and Examples. 11.1.1 Definition. A differentiable parametric curve in R n of class C k (k 1) is a C k map t α(t) = (α 1 (t),..., α n (t)) of
Visualizing Quaternions
 Visualizing Quaternions Andrew J. Hanson Computer Science Department Indiana University Siggraph 1 Tutorial 1 GRAND PLAN I: Fundamentals of Quaternions II: Visualizing Quaternion Geometry III: Quaternion
Visualizing Quaternions Andrew J. Hanson Computer Science Department Indiana University Siggraph 1 Tutorial 1 GRAND PLAN I: Fundamentals of Quaternions II: Visualizing Quaternion Geometry III: Quaternion
Volumes of Solids of Revolution Lecture #6 a
 Volumes of Solids of Revolution Lecture #6 a Sphereoid Parabaloid Hyperboloid Whateveroid Volumes Calculating 3-D Space an Object Occupies Take a cross-sectional slice. Compute the area of the slice. Multiply
Volumes of Solids of Revolution Lecture #6 a Sphereoid Parabaloid Hyperboloid Whateveroid Volumes Calculating 3-D Space an Object Occupies Take a cross-sectional slice. Compute the area of the slice. Multiply
PARAMETERIZATIONS OF PLANE CURVES
 PARAMETERIZATIONS OF PLANE CURVES Suppose we want to plot the path of a particle moving in a plane. This path looks like a curve, but we cannot plot it like we would plot any other type of curve in the
PARAMETERIZATIONS OF PLANE CURVES Suppose we want to plot the path of a particle moving in a plane. This path looks like a curve, but we cannot plot it like we would plot any other type of curve in the
MATH 261 EXAM I PRACTICE PROBLEMS
 MATH 261 EXAM I PRACTICE PROBLEMS These practice problems are pulled from actual midterms in previous semesters. Exam 1 typically has 6 problems on it, with no more than one problem of any given type (e.g.,
MATH 261 EXAM I PRACTICE PROBLEMS These practice problems are pulled from actual midterms in previous semesters. Exam 1 typically has 6 problems on it, with no more than one problem of any given type (e.g.,
ENGI Parametric & Polar Curves Page 2-01
 ENGI 3425 2. Parametric & Polar Curves Page 2-01 2. Parametric and Polar Curves Contents: 2.1 Parametric Vector Functions 2.2 Parametric Curve Sketching 2.3 Polar Coordinates r f 2.4 Polar Curve Sketching
ENGI 3425 2. Parametric & Polar Curves Page 2-01 2. Parametric and Polar Curves Contents: 2.1 Parametric Vector Functions 2.2 Parametric Curve Sketching 2.3 Polar Coordinates r f 2.4 Polar Curve Sketching
Parallel Transport on the Torus
 MLI Home Mathematics The Torus Parallel Transport Parallel Transport on the Torus Because it really is all about the torus, baby After reading about the torus s curvature, shape operator, and geodesics,
MLI Home Mathematics The Torus Parallel Transport Parallel Transport on the Torus Because it really is all about the torus, baby After reading about the torus s curvature, shape operator, and geodesics,
Parametric curves. Reading. Curves before computers. Mathematical curve representation. CSE 457 Winter Required:
 Reading Required: Angel 10.1-10.3, 10.5.2, 10.6-10.7, 10.9 Parametric curves CSE 457 Winter 2014 Optional Bartels, Beatty, and Barsky. An Introduction to Splines for use in Computer Graphics and Geometric
Reading Required: Angel 10.1-10.3, 10.5.2, 10.6-10.7, 10.9 Parametric curves CSE 457 Winter 2014 Optional Bartels, Beatty, and Barsky. An Introduction to Splines for use in Computer Graphics and Geometric
Lagrange Multipliers. Lagrange Multipliers. Lagrange Multipliers. Lagrange Multipliers. Lagrange Multipliers. Lagrange Multipliers
 In this section we present Lagrange s method for maximizing or minimizing a general function f(x, y, z) subject to a constraint (or side condition) of the form g(x, y, z) = k. Figure 1 shows this curve
In this section we present Lagrange s method for maximizing or minimizing a general function f(x, y, z) subject to a constraint (or side condition) of the form g(x, y, z) = k. Figure 1 shows this curve
Unit 13: Periodic Functions and Trig
 Date Period Unit 13: Periodic Functions and Trig Day Topic 0 Special Right Triangles and Periodic Function 1 Special Right Triangles Standard Position Coterminal Angles 2 Unit Circle Cosine & Sine (x,
Date Period Unit 13: Periodic Functions and Trig Day Topic 0 Special Right Triangles and Periodic Function 1 Special Right Triangles Standard Position Coterminal Angles 2 Unit Circle Cosine & Sine (x,
Continuity and Tangent Lines for functions of two variables
 Continuity and Tangent Lines for functions of two variables James K. Peterson Department of Biological Sciences and Department of Mathematical Sciences Clemson University April 4, 2014 Outline 1 Continuity
Continuity and Tangent Lines for functions of two variables James K. Peterson Department of Biological Sciences and Department of Mathematical Sciences Clemson University April 4, 2014 Outline 1 Continuity
10.2 Calculus with Parametric Curves
 CHAPTER 1. PARAMETRIC AND POLAR 1 1.2 Calculus with Parametric Curves Example 1. Return to the parametric equations in Example 2 from the previous section: x t +sin() y t + cos() (a) Find the cartesian
CHAPTER 1. PARAMETRIC AND POLAR 1 1.2 Calculus with Parametric Curves Example 1. Return to the parametric equations in Example 2 from the previous section: x t +sin() y t + cos() (a) Find the cartesian
First of all, we need to know what it means for a parameterize curve to be differentiable. FACT:
 CALCULUS WITH PARAMETERIZED CURVES In calculus I we learned how to differentiate and integrate functions. In the chapter covering the applications of the integral, we learned how to find the length of
CALCULUS WITH PARAMETERIZED CURVES In calculus I we learned how to differentiate and integrate functions. In the chapter covering the applications of the integral, we learned how to find the length of
MATH 2023 Multivariable Calculus
 MATH 2023 Multivariable Calculus Problem Sets Note: Problems with asterisks represent supplementary informations. You may want to read their solutions if you like, but you don t need to work on them. Set
MATH 2023 Multivariable Calculus Problem Sets Note: Problems with asterisks represent supplementary informations. You may want to read their solutions if you like, but you don t need to work on them. Set
Mysterious or unsupported answers will not receive full credit. Your work should be mathematically correct and carefully and legibly written.
 Math 2374 Spring 2006 Final May 8, 2006 Time Limit: 1 Hour Name (Print): Student ID: Section Number: Teaching Assistant: Signature: This exams contains 11 pages (including this cover page) and 10 problems.
Math 2374 Spring 2006 Final May 8, 2006 Time Limit: 1 Hour Name (Print): Student ID: Section Number: Teaching Assistant: Signature: This exams contains 11 pages (including this cover page) and 10 problems.
University of California, Berkeley
 University of California, Berkeley FINAL EXAMINATION, Fall 2012 DURATION: 3 hours Department of Mathematics MATH 53 Multivariable Calculus Examiner: Sean Fitzpatrick Total: 100 points Family Name: Given
University of California, Berkeley FINAL EXAMINATION, Fall 2012 DURATION: 3 hours Department of Mathematics MATH 53 Multivariable Calculus Examiner: Sean Fitzpatrick Total: 100 points Family Name: Given
Chapter 6. Curves and Surfaces. 6.1 Graphs as Surfaces
 Chapter 6 Curves and Surfaces In Chapter 2 a plane is defined as the zero set of a linear function in R 3. It is expected a surface is the zero set of a differentiable function in R n. To motivate, graphs
Chapter 6 Curves and Surfaces In Chapter 2 a plane is defined as the zero set of a linear function in R 3. It is expected a surface is the zero set of a differentiable function in R n. To motivate, graphs
3.9 LINEAR APPROXIMATION AND THE DERIVATIVE
 158 Chapter Three SHORT-CUTS TO DIFFERENTIATION 39 LINEAR APPROXIMATION AND THE DERIVATIVE The Tangent Line Approximation When we zoom in on the graph of a differentiable function, it looks like a straight
158 Chapter Three SHORT-CUTS TO DIFFERENTIATION 39 LINEAR APPROXIMATION AND THE DERIVATIVE The Tangent Line Approximation When we zoom in on the graph of a differentiable function, it looks like a straight
Constrained Optimization and Lagrange Multipliers
 Constrained Optimization and Lagrange Multipliers MATH 311, Calculus III J. Robert Buchanan Department of Mathematics Fall 2011 Constrained Optimization In the previous section we found the local or absolute
Constrained Optimization and Lagrange Multipliers MATH 311, Calculus III J. Robert Buchanan Department of Mathematics Fall 2011 Constrained Optimization In the previous section we found the local or absolute
Tangents of Parametric Curves
 Jim Lambers MAT 169 Fall Semester 2009-10 Lecture 32 Notes These notes correspond to Section 92 in the text Tangents of Parametric Curves When a curve is described by an equation of the form y = f(x),
Jim Lambers MAT 169 Fall Semester 2009-10 Lecture 32 Notes These notes correspond to Section 92 in the text Tangents of Parametric Curves When a curve is described by an equation of the form y = f(x),
Math 113 Calculus III Final Exam Practice Problems Spring 2003
 Math 113 Calculus III Final Exam Practice Problems Spring 23 1. Let g(x, y, z) = 2x 2 + y 2 + 4z 2. (a) Describe the shapes of the level surfaces of g. (b) In three different graphs, sketch the three cross
Math 113 Calculus III Final Exam Practice Problems Spring 23 1. Let g(x, y, z) = 2x 2 + y 2 + 4z 2. (a) Describe the shapes of the level surfaces of g. (b) In three different graphs, sketch the three cross
Practice problems from old exams for math 233
 Practice problems from old exams for math 233 William H. Meeks III October 26, 2012 Disclaimer: Your instructor covers far more materials that we can possibly fit into a four/five questions exams. These
Practice problems from old exams for math 233 William H. Meeks III October 26, 2012 Disclaimer: Your instructor covers far more materials that we can possibly fit into a four/five questions exams. These
MTH 122 Calculus II Essex County College Division of Mathematics and Physics 1 Lecture Notes #11 Sakai Web Project Material
 MTH Calculus II Essex County College Division of Mathematics and Physics Lecture Notes # Sakai Web Project Material Introduction - - 0 - Figure : Graph of y sin ( x y ) = x cos (x + y) with red tangent
MTH Calculus II Essex County College Division of Mathematics and Physics Lecture Notes # Sakai Web Project Material Introduction - - 0 - Figure : Graph of y sin ( x y ) = x cos (x + y) with red tangent
We have already studied equations of the line. There are several forms:
 Chapter 13-Coordinate Geometry extended. 13.1 Graphing equations We have already studied equations of the line. There are several forms: slope-intercept y = mx + b point-slope y - y1=m(x - x1) standard
Chapter 13-Coordinate Geometry extended. 13.1 Graphing equations We have already studied equations of the line. There are several forms: slope-intercept y = mx + b point-slope y - y1=m(x - x1) standard
notes13.1inclass May 01, 2015
 Chapter 13-Coordinate Geometry extended. 13.1 Graphing equations We have already studied equations of the line. There are several forms: slope-intercept y = mx + b point-slope y - y1=m(x - x1) standard
Chapter 13-Coordinate Geometry extended. 13.1 Graphing equations We have already studied equations of the line. There are several forms: slope-intercept y = mx + b point-slope y - y1=m(x - x1) standard
Parametric curves. Brian Curless CSE 457 Spring 2016
 Parametric curves Brian Curless CSE 457 Spring 2016 1 Reading Required: Angel 10.1-10.3, 10.5.2, 10.6-10.7, 10.9 Optional Bartels, Beatty, and Barsky. An Introduction to Splines for use in Computer Graphics
Parametric curves Brian Curless CSE 457 Spring 2016 1 Reading Required: Angel 10.1-10.3, 10.5.2, 10.6-10.7, 10.9 Optional Bartels, Beatty, and Barsky. An Introduction to Splines for use in Computer Graphics
MAT1B01: Curves defined by parametric equations
 MAT1B01: Curves defined by parametric equations Dr Craig 24 October 2016 My details: acraig@uj.ac.za Consulting hours: Thursday 11h20 12h55 Friday 11h30 13h00 Office C-Ring 508 https://andrewcraigmaths.wordpress.com/
MAT1B01: Curves defined by parametric equations Dr Craig 24 October 2016 My details: acraig@uj.ac.za Consulting hours: Thursday 11h20 12h55 Friday 11h30 13h00 Office C-Ring 508 https://andrewcraigmaths.wordpress.com/
10.2 Calculus with Parametric Curves
 CHAPTER 1. PARAMETRIC AND POLAR 91 1.2 Calculus with Parametric Curves Example 1. Return to the parametric equations in Example 2 from the previous section: x t + sin() y t + cos() (a) Find the Cartesian
CHAPTER 1. PARAMETRIC AND POLAR 91 1.2 Calculus with Parametric Curves Example 1. Return to the parametric equations in Example 2 from the previous section: x t + sin() y t + cos() (a) Find the Cartesian
AP Calculus. Slide 1 / 213 Slide 2 / 213. Slide 3 / 213. Slide 4 / 213. Slide 4 (Answer) / 213 Slide 5 / 213. Derivatives. Derivatives Exploration
 / 213 Slide 5 / 213. Derivatives. Derivatives Exploration") Slide 1 / 213 Slide 2 / 213 AP Calculus Derivatives 2015-11-03 www.njctl.org Slide 3 / 213 Table of Contents Slide 4 / 213 Rate of Change Slope of a Curve (Instantaneous ROC) Derivative Rules: Power, Constant,
Slide 1 / 213 Slide 2 / 213 AP Calculus Derivatives 2015-11-03 www.njctl.org Slide 3 / 213 Table of Contents Slide 4 / 213 Rate of Change Slope of a Curve (Instantaneous ROC) Derivative Rules: Power, Constant,
The Divergence Theorem
 The Divergence Theorem MATH 311, Calculus III J. Robert Buchanan Department of Mathematics Summer 2011 Green s Theorem Revisited Green s Theorem: M(x, y) dx + N(x, y) dy = C R ( N x M ) da y y x Green
The Divergence Theorem MATH 311, Calculus III J. Robert Buchanan Department of Mathematics Summer 2011 Green s Theorem Revisited Green s Theorem: M(x, y) dx + N(x, y) dy = C R ( N x M ) da y y x Green
Tutorial 4. Differential Geometry I - Curves
 23686 Numerical Geometry of Images Tutorial 4 Differential Geometry I - Curves Anastasia Dubrovina c 22 / 2 Anastasia Dubrovina CS 23686 - Tutorial 4 - Differential Geometry I - Curves Differential Geometry
23686 Numerical Geometry of Images Tutorial 4 Differential Geometry I - Curves Anastasia Dubrovina c 22 / 2 Anastasia Dubrovina CS 23686 - Tutorial 4 - Differential Geometry I - Curves Differential Geometry
CALCULUS II. Parametric Equations and Polar Coordinates. Paul Dawkins
 CALCULUS II Parametric Equations and Polar Coordinates Paul Dawkins Table of Contents Preface... ii Parametric Equations and Polar Coordinates... 3 Introduction... 3 Parametric Equations and Curves...
CALCULUS II Parametric Equations and Polar Coordinates Paul Dawkins Table of Contents Preface... ii Parametric Equations and Polar Coordinates... 3 Introduction... 3 Parametric Equations and Curves...
Lecture 34: Curves defined by Parametric equations
 Curves defined by Parametric equations When the path of a particle moving in the plane is not the graph of a function, we cannot describe it using a formula that express y directly in terms of x, or x
Curves defined by Parametric equations When the path of a particle moving in the plane is not the graph of a function, we cannot describe it using a formula that express y directly in terms of x, or x
AP Calculus. Extreme Values: Graphically. Slide 1 / 163 Slide 2 / 163. Slide 4 / 163. Slide 3 / 163. Slide 5 / 163. Slide 6 / 163
 Slide 1 / 163 Slide 2 / 163 AP Calculus Analyzing Functions Using Derivatives 2015-11-04 www.njctl.org Slide 3 / 163 Table of Contents click on the topic to go to that section Slide 4 / 163 Extreme Values
Slide 1 / 163 Slide 2 / 163 AP Calculus Analyzing Functions Using Derivatives 2015-11-04 www.njctl.org Slide 3 / 163 Table of Contents click on the topic to go to that section Slide 4 / 163 Extreme Values
Parametric and Polar Curves
 Chapter 2 Parametric and Polar Curves 2.1 Parametric Equations; Tangent Lines and Arc Length for Parametric Curves Parametric Equations So far we ve described a curve by giving an equation that the coordinates
Chapter 2 Parametric and Polar Curves 2.1 Parametric Equations; Tangent Lines and Arc Length for Parametric Curves Parametric Equations So far we ve described a curve by giving an equation that the coordinates
Parametric and Polar Curves
 Chapter 2 Parametric and Polar Curves 2.1 Parametric Equations; Tangent Lines and Arc Length for Parametric Curves Parametric Equations So far we ve described a curve by giving an equation that the coordinates
Chapter 2 Parametric and Polar Curves 2.1 Parametric Equations; Tangent Lines and Arc Length for Parametric Curves Parametric Equations So far we ve described a curve by giving an equation that the coordinates
Mathematically, the path or the trajectory of a particle moving in space in described by a function of time.
 Module 15 : Vector fields, Gradient, Divergence and Curl Lecture 45 : Curves in space [Section 45.1] Objectives In this section you will learn the following : Concept of curve in space. Parametrization
Module 15 : Vector fields, Gradient, Divergence and Curl Lecture 45 : Curves in space [Section 45.1] Objectives In this section you will learn the following : Concept of curve in space. Parametrization
Without fully opening the exam, check that you have pages 1 through 11.
 Name: Section: Recitation Instructor: INSTRUCTIONS Fill in your name, etc. on this first page. Without fully opening the exam, check that you have pages 1 through 11. Show all your work on the standard
Name: Section: Recitation Instructor: INSTRUCTIONS Fill in your name, etc. on this first page. Without fully opening the exam, check that you have pages 1 through 11. Show all your work on the standard
We have already studied equations of the line. There are several forms:
 Chapter 13-Coordinate Geometry extended. 13.1 Graphing equations We have already studied equations of the line. There are several forms: slope-intercept y = mx + b point-slope y - y1=m(x - x1) standard
Chapter 13-Coordinate Geometry extended. 13.1 Graphing equations We have already studied equations of the line. There are several forms: slope-intercept y = mx + b point-slope y - y1=m(x - x1) standard
10.1 Curves Defined by Parametric Equations
 10.1 Curves Defined by Parametric Equations Ex: Consider the unit circle from Trigonometry. What is the equation of that circle? There are 2 ways to describe it: x 2 + y 2 = 1 and x = cos θ y = sin θ When
10.1 Curves Defined by Parametric Equations Ex: Consider the unit circle from Trigonometry. What is the equation of that circle? There are 2 ways to describe it: x 2 + y 2 = 1 and x = cos θ y = sin θ When
ECE 600, Dr. Farag, Summer 09
 ECE 6 Summer29 Course Supplements. Lecture 4 Curves and Surfaces Aly A. Farag University of Louisville Acknowledgements: Help with these slides were provided by Shireen Elhabian A smile is a curve that
ECE 6 Summer29 Course Supplements. Lecture 4 Curves and Surfaces Aly A. Farag University of Louisville Acknowledgements: Help with these slides were provided by Shireen Elhabian A smile is a curve that
4.3, Math 1410 Name: And now for something completely different... Well, not really.
 4.3, Math 1410 Name: And now for something completely different... Well, not really. How derivatives affect the shape of a graph. Please allow me to offer some explanation as to why the first couple parts
4.3, Math 1410 Name: And now for something completely different... Well, not really. How derivatives affect the shape of a graph. Please allow me to offer some explanation as to why the first couple parts
Differential Geometry MAT WEEKLY PROGRAM 1-2
 15.09.014 WEEKLY PROGRAM 1- The first week, we will talk about the contents of this course and mentioned the theory of curves and surfaces by giving the relation and differences between them with aid of
15.09.014 WEEKLY PROGRAM 1- The first week, we will talk about the contents of this course and mentioned the theory of curves and surfaces by giving the relation and differences between them with aid of
Practice problems from old exams for math 233 William H. Meeks III December 21, 2009
 Practice problems from old exams for math 233 William H. Meeks III December 21, 2009 Disclaimer: Your instructor covers far more materials that we can possibly fit into a four/five questions exams. These
Practice problems from old exams for math 233 William H. Meeks III December 21, 2009 Disclaimer: Your instructor covers far more materials that we can possibly fit into a four/five questions exams. These
Curves: We always parameterize a curve with a single variable, for example r(t) =
 =") Final Exam Topics hapters 16 and 17 In a very broad sense, the two major topics of this exam will be line and surface integrals. Both of these have versions for scalar functions and vector fields, and
Final Exam Topics hapters 16 and 17 In a very broad sense, the two major topics of this exam will be line and surface integrals. Both of these have versions for scalar functions and vector fields, and
1 Vector Functions and Space Curves
 ontents 1 Vector Functions and pace urves 2 1.1 Limits, Derivatives, and Integrals of Vector Functions...................... 2 1.2 Arc Length and urvature..................................... 2 1.3 Motion
ontents 1 Vector Functions and pace urves 2 1.1 Limits, Derivatives, and Integrals of Vector Functions...................... 2 1.2 Arc Length and urvature..................................... 2 1.3 Motion
15. PARAMETRIZED CURVES AND GEOMETRY
 15. PARAMETRIZED CURVES AND GEOMETRY Parametric or parametrized curves are based on introducing a parameter which increases as we imagine travelling along the curve. Any graph can be recast as a parametrized
15. PARAMETRIZED CURVES AND GEOMETRY Parametric or parametrized curves are based on introducing a parameter which increases as we imagine travelling along the curve. Any graph can be recast as a parametrized
Mar. 20 Math 2335 sec 001 Spring 2014
 Mar. 20 Math 2335 sec 001 Spring 2014 Chebyshev Polynomials Definition: For an integer n 0 define the function ( ) T n (x) = cos n cos 1 (x), 1 x 1. It can be shown that T n is a polynomial of degree n.
Mar. 20 Math 2335 sec 001 Spring 2014 Chebyshev Polynomials Definition: For an integer n 0 define the function ( ) T n (x) = cos n cos 1 (x), 1 x 1. It can be shown that T n is a polynomial of degree n.
Lagrange multipliers October 2013
 Lagrange multipliers 14.8 14 October 2013 Example: Optimization with constraint. Example: Find the extreme values of f (x, y) = x + 2y on the ellipse 3x 2 + 4y 2 = 3. 3/2 1 1 3/2 Example: Optimization
Lagrange multipliers 14.8 14 October 2013 Example: Optimization with constraint. Example: Find the extreme values of f (x, y) = x + 2y on the ellipse 3x 2 + 4y 2 = 3. 3/2 1 1 3/2 Example: Optimization
1 extrema notebook. November 25, 2012
 Do now as a warm up: Suppose this graph is a function f, defined on [a,b]. What would you say about the value of f at each of these x values: a, x 1, x 2, x 3, x 4, x 5, x 6, and b? What would you say
Do now as a warm up: Suppose this graph is a function f, defined on [a,b]. What would you say about the value of f at each of these x values: a, x 1, x 2, x 3, x 4, x 5, x 6, and b? What would you say
AQA GCSE Further Maths Topic Areas
 AQA GCSE Further Maths Topic Areas This document covers all the specific areas of the AQA GCSE Further Maths course, your job is to review all the topic areas, answering the questions if you feel you need
AQA GCSE Further Maths Topic Areas This document covers all the specific areas of the AQA GCSE Further Maths course, your job is to review all the topic areas, answering the questions if you feel you need
Use Parametric notation. Interpret the effect that T has on the graph as motion.
 Learning Objectives Parametric Functions Lesson 3: Go Speed Racer! Level: Algebra 2 Time required: 90 minutes One of the main ideas of the previous lesson is that the control variable t does not appear
Learning Objectives Parametric Functions Lesson 3: Go Speed Racer! Level: Algebra 2 Time required: 90 minutes One of the main ideas of the previous lesson is that the control variable t does not appear
: = Curves Defined by Parametric Equations. Ex: Consider the unit circle from Trigonometry. What is the equation of that circle?
 10.1 Curves Defined by Parametric Equations Ex: Consider the unit circle from Trigonometry. What is the equation of that circle? of 8* * # 2+-12=1 There are 2 ways to describe it: x 2 + y 2 = 1 x = cos!
10.1 Curves Defined by Parametric Equations Ex: Consider the unit circle from Trigonometry. What is the equation of that circle? of 8* * # 2+-12=1 There are 2 ways to describe it: x 2 + y 2 = 1 x = cos!
2D Spline Curves. CS 4620 Lecture 18
 2D Spline Curves CS 4620 Lecture 18 2014 Steve Marschner 1 Motivation: smoothness In many applications we need smooth shapes that is, without discontinuities So far we can make things with corners (lines,
2D Spline Curves CS 4620 Lecture 18 2014 Steve Marschner 1 Motivation: smoothness In many applications we need smooth shapes that is, without discontinuities So far we can make things with corners (lines,
Lower Bounds on Mean Curvature of Closed Curves Contained in Convex Boundaries
 Lower Bounds on Mean Curvature of Closed Curves Contained in Convex Boundaries Greg McNulty, Robert King, Haijian Lin, Sarah Mall August 13, 24 Abstract We investigate a geometric inequality that states
Lower Bounds on Mean Curvature of Closed Curves Contained in Convex Boundaries Greg McNulty, Robert King, Haijian Lin, Sarah Mall August 13, 24 Abstract We investigate a geometric inequality that states
We can conclude that if f is differentiable in an interval containing a, then. f(x) L(x) = f(a) + f (a)(x a).
 L(x) = f(a) + f (a)(x a).") = sin( x) = 8 Lecture :Linear Approximations and Differentials Consider a point on a smooth curve y = f(x), say P = (a, f(a)), If we draw a tangent line to the curve at the point P, we can see from the
= sin( x) = 8 Lecture :Linear Approximations and Differentials Consider a point on a smooth curve y = f(x), say P = (a, f(a)), If we draw a tangent line to the curve at the point P, we can see from the
1. Fill in the right hand side of the following equation by taking the derivative: (x sin x) =
 =") 7.1 What is x cos x? 1. Fill in the right hand side of the following equation by taking the derivative: (x sin x = 2. Integrate both sides of the equation. Instructor: When instructing students to integrate
7.1 What is x cos x? 1. Fill in the right hand side of the following equation by taking the derivative: (x sin x = 2. Integrate both sides of the equation. Instructor: When instructing students to integrate
Math 575 Exam 3. (t). What is the chromatic number of G?
. What is the chromatic number of G?") Math 575 Exam 3 Name 1 (a) Draw the Grötsch graph See your notes (b) Suppose that G is a graph having 6 vertices and 9 edges and that the chromatic polynomial of G is given below Fill in the missing coefficients
Math 575 Exam 3 Name 1 (a) Draw the Grötsch graph See your notes (b) Suppose that G is a graph having 6 vertices and 9 edges and that the chromatic polynomial of G is given below Fill in the missing coefficients