Convolutional Residual Network for Grasp Localization
|
|
|
- Stephen Beasley
- 5 years ago
- Views:
Transcription
1 Convolutional Residual Network for Grasp Localization Ludovic Trottier, Philippe Giguère, Brahim Chaib-draa Computer Science and Software Engineering Québec, Canada Laval University {philippe.giguere, Abstract Object grasping is an important ability for carrying out complex manipulation tasks with autonomous robotic systems. The grasp localization module plays an essential role in the success of the grasp maneuver. Generally viewed as a vision perception problem, its goal is determining regions of high graspability by interpreting light and depth information. Over the past few years, several works in Deep Learning (DL) have shown the high potential of Convolutional Neural Networks (CNNs) for solving vision-related problems. Advances in residual networks have further facilitated neural network training by improving convergence time and generalization performances with identity skip connections and residual mappings. In this paper, we investigate the use of residual networks for grasp localization. A standard residual CNN for object recognition uses a global average pooling layer prior to the fully-connected layers. Our experiments have shown that this pooling layer removes the spatial correlation in the back-propagated error signal, and this prevents the network from correctly localizing good grasp regions. We propose an architecture modification that removes this limitation. Our experiments on the Cornell task have shown that our network obtained state-of-the-art performances of 15% and 11.86% rectangle metric error on image-wise and object-wise splits respectively. We did not use pre-training but rather opted for on-line data augmentation for managing overfitting. In comparison to previous approach that employed off-line data augmentation, our network used 15x fewer observations, which significantly reduced training time. Keywords-deep residual network; grasping; localization I. INTRODUCTION Grasping objects with a robotic arm is an essential ability for performing complex manipulation tasks with robotic systems [1] [5]. General purpose robots need to physically interact with the surrounding world in order to accomplish their goals. Actions such as opening doors, moving objects around or using tools, all require the fundamental skill of grasping objects. Integrating the necessary knowledge for succeeding at this task is one of the first steps towards the long-term goal of deploying intelligent robotic agents. The ease with which humans perform object grasping is however not an accurate reflection of the true complexity of the task. Humans see objects and can identify without much difficulty the proper location where to put their hands for picking them up. They can also estimate other properties of the objects, such as the weight, by simply looking at them. This is due to years of jointly training the visual and motor cortices with sensory information from both the world and the body during interactions with objects. Robotic grasping still lags behind human grasping because replicating such learning conditions is a challenging problem. Since visual perception plays an important role in object grasping [6], we focus in this paper on the perception system for robotic grasping. Its goal is localizing graspable regions by performing general scene understanding. The system interprets light and depth information, known as RGBD images, and outputs a list of candidate regions ordered by graspability. This involves elaborate and complex visual tasks, such as image segmentation, visual disambiguation and object detection. Due to the complexity of these tasks, learning an efficient perception system for extracting the most relevant information from the surrounding environment is essential. The performance of the overall grasping system highly depends on the graspability of the predicted region. Convolutional Neural Networks (CNNs) have become the leading deep learning approach for visual recognition [7], [8]. Inspired by the biological visual cortex, CNNs aim at learning feature hierarchies from the data. High-level features are composed of low-level features using multiple layers of non-linear transformations [9]. Each layer in the hierarchy constitutes an increase in the level of abstraction from the layers below. This key principle allows CNNs to represent complex raw observations, such as RGBD images, into simple high-level concepts. Originally proposed in the 80s, CNNs only became popular recently due to being difficult to train. Their hierarchical structure makes them vulnerable to the vanishing gradient problem. As the CNN gets deeper, the back-propagated error signal from the higher levels to the lower levels vanishes more easily. Learning representative features in the lowest layers can be more difficult due to the weak error signal. This may create a discrepancy between the learning speed of the higher and lower layer parameters, which can impede the network from obtaining high performances. Recently, several advances in network regularization have been proposed for reducing vanishing gradients. Residual networks (ResNets) with identity shortcut connections are among the most recent ones and are growing in popularity.
2 The central idea in ResNets is learning additive residual functions instead of standard feed-forward functions as the main building blocks of the network. This is accomplished by connecting the output of low-level layers to the output of high-level layers with an identity skip connection, then by merging the outputs with an addition. Skip connections create information propagation paths through the entire network, which allows propagating signals directly from one layer to the next. Due to the increased information flow in both the forward and backward passes, deep residual networks are easier to train than their non-residual counterparts. The objective of this paper is to make use of the recent advances in network regularization for training a deep CNN on the task of localizing good grasp regions. We contribute in the following ways: 1) A standard ResNet for object recognition uses global average pooling prior to the fully connected layers. We have observed in our experiments that global average pooling removes the spatial correlation of the error signal, which makes learning the spatial locations of the graspable regions impossible for the network. We propose a modification of the ResNet architecture that removes this limitation. 2) We show that we improve the state-of-the-art performance of previous methods without pre-training and with on-the-fly data augmentation. This results in the removal of the tedious pre-training stage, and a 15x reduction in training images for the fine-tuning stage. The rest of this paper is divided as follows. We review the related works in Section II and elaborate on the problem description in Section III. We present the experiments in Section IV and discuss the results in Section V. We conclude our paper in Section VI. II. RELATED WORK Several previous approaches used 3D modeling for localizing regions of high graspability [10] [12]. Although these knowledge-based methods can perform well in controlled situations, they rely on building complex and accurate 3D representations. Requiring a priori the physical properties reduces their applicability in general grasping scenarios. The system rarely knows in advance the physical properties of objects it has never seen. With our approach, we seek to alleviate these limitations by performing grasp localization solely from the light and depth information. Recent works have proposed viewing grasp localization as a vision detection problem. Approaches such as score function [13], extreme learning machine [14] or sparse dictionary learning [15] apply vision-related frameworks for processing RGBD images. They however suffer from a large computational burden due to incorporating an expensive sliding-window stage during their detection. With our approach, we seek to perform grasp localization in a single-shot manner. By only processing each image once, our goal is to accelerate detection and obtain faster speed performances at test time. Other works in the field of neural networks and deep learning have recently been proposed. For instance, Lenz et al. [5] proposed a cascade of multi-layered perceptrons for predicting the graspability of an image sub-region. They however relied on different types of hand-designed regularization terms for reducing the difficulties of training their network. Other approaches such as two-stage closedloop [16] and pre-trained AlexNet [4] instead opted for the more popular convolutional neural network model. They however needed a lengthy pre-training for initializing the weights. With our approach, we want to put aside handdesigned regularization terms and avoid the tedious pretraining stage. Our goal is to make use of the recent advances in residual networks and train a deep neural network on the small Cornell dataset achieving state-of-the-art performances without pre-training nor custom regularization terms. Recent efforts have been devoted to training grasp localization system with a big data perspective [2], [17]. These methods train scalable approaches by exploiting hundreds of thousands of observations. While these initiatives are fundamental for achieving the long-term goal of autonomous robotic systems, large datasets are not common in constrained industrial contexts. They are usually too expensive to create. A grasp localization approach that can be trained on a small dataset will be more applicable in this case. As we show in our experiments, our residual network obtains stateof-the-art performances by only training on observations from the small Cornell dataset. III. PROBLEM DESCRIPTION In this section, we elaborate on the problem of localizing candidate grasp regions. We introduce the grasp rectangle representation and describe the proposed residual CNN. A. Grasp Localization The goal of grasp localization is predicting a representation of the gripper configuration in a region of high graspability. For a standard gripper with two parallel plategripping fingers, a typical representation of the full 7- dimensional configuration is a low-dimensional projection of the gripper at the last stage of the grasp. Although several previous works have proposed different representations, such as a single 2D point [18] or a pair of points [19], these representations did not faithfully encompass the full dimensionality of the gripper. For instance, a single 2D point does not include the gripper orientation, while a pair of points does not include the height of the gripper s plates. Using incomplete representations leaves some aspects of the configuration to be estimated separately, which adds complexity and new sources of error. The grasp rectangle is a faithful representation of the full 7-dimensional gripper configuration [13]. The 2D oriented
 are the center coordinates and θ is the orientation.")
3 Figure 1. An example of a grasp rectangle R labeling a potential good grasp. This five-dimensional grasp representation is used with two-plated parallel grippers. The blue lines are the plates, the red lines show the gripper opening, (x, y) are the center coordinates and θ is the orientation. rectangle takes into account the gripper s location, orientation and physical constraints. As shown in Figure 1, the rectangle specifies 5 parameters: R = {x, y, w, h, θ}, (1) where (x, y) corresponds to the center position of the gripper, (w, h) the opening and length of the plates, and θ the orientation with respect to the horizontal axis of the usual left-handed Cartesian coordinate system. Using the grasp rectangle representation makes grasp localization similar to object detection in vision. The task is formulated as a region-based regression problem, where the goal is predicting a grasp rectangle and a confidence score for each image sub-region [4]. The sub-region with the highest confidence score is selected as the candidate location and the associated rectangle as the candidate grasp configuration. In this paper, we use a 7 7 grid, which amounts to predicting 49 grasp rectangles and 49 confidence scores for each image [4]. For the grasp rectangles, we take into account the rotational invariance of the gripper angle. Due to the symmetry of the rectangle, grasping at θ or θ results in the same gripper configuration. Managing this invariance is done by predicting the sin and cos of twice the angle [4]: R = {x, y, w, h, sin(2θ), cos(2θ)}. (2) As a result, the model s required output dimensionality for this regression problem is = 294 for the grasp rectangles and = 49 for the confidence score. Figure 5 shows examples of such predictions. B. Residual Network The aim of residual networks is to address the degradation problem, which is defined as the decrease in accuracy as depth becomes greater than a certain threshold [20]. While we may believe that the recorded performance reduction Figure 2. An illustration of our residual network (left) and the residual block (right) from which it is composed. A block has a residual mapping f i and an identity skip connection. The output x i of block i is processed twice by a series of batch normalization, ReLU and convolution layers, then is added to x i. This gives the output x i+1, which in forwarded to the next block. Our network does not use the standard global average pooling for predicting the confidence map, only for the rectangle configurations. was caused by overfitting, experiments show otherwise [21]. Given a shallow well-trained network achieving good performance, it is always possible to artificially increase its depth by stacking identity layers without affecting accuracy. The existence of such solution indicates that a deep network should never produce worse performance than its shallower counterpart. However, learning identity layers with a fullyconnected / convolutional layer followed by a non-linear activation function is a hard optimization task [21]. Even though a deep network optimal solution exists by construction, obtaining it may not be possible because the model cannot be adequately optimized. Residual networks thus address the degradation problem by facilitating the learning of identity mappings. It is a type of architecture consisting of a stack of residual blocks. Each block contains a residual mapping f i and a skip connection bypassing f i. In this paper, we only consider identity skip connections [22]. Denoting x i as the output of block i, a residual network is recursively defined as: x i+1 = f i (x i ) + x i (3) With this formulation, the network can easily learn an identity mapping between x i and x i+1 by pushing all parameters of f i to zero. Previous work has shown that the performance of the network highly depends on the choice of the mappings f i [22]. In this paper, we only consider full pre-activation
4 mappings, since they obtained the best performances in previous work [22]. As shown in Figure 2, they are defined as follows: f i (x i ) = W i2 σ(b(w i1 σ(b(x i )))), (4) where B corresponds to batch normalization [23], σ to the ReLU non-linearity [24], W i1 and W i2 to the weights. For CNNs, we replace the matrix multiplication by a discrete 2D convolution. A standard residual CNN for classifying objects in RGB images uses a global average pooling layer at the end of the convolutional stage, i.e. prior to the fully-connected layers. For a convolutional stage that outputs a (n f, n h, n w )- dimensional tensor, the global average pooling layer computes the average over dimensions n h and n w. This results in an n f -dimensional vector that is fed to the subsequent fullyconnected layers. A traditional CNN would instead flatten the (n f, n h, n w )-dimensional tensor into a (n f n h n w )- dimensional vector. Global average pooling helps to create correspondence between the feature maps and the object categories, which can improve classification performances. We have observed in preliminary experiments that a residual CNN with global average pooling cannot solve the grasp localization regression problem of Section III-A. The network never converges to a suitable solution because it is unable to assign high confidence score to sub-regions of high graspability. In fact, it assigns the same confidence score to every sub-region which shows that it does not learn to localize grasp rectangles. This is due to the averaging nature of the pooling layer that causes spatial information loss in the error signal. The network is unable to spatially correlate its mistakes on the confidence scores with the gradient of the loss function because the spatial information is squashed by the average. To solve this problem, we propose keeping the global average pooling only for predicting the grasp rectangles, and propose using a standard flattening layer for the confidence scores. While the global average pooling will not interfere with the spatial information of the confidence scores, it will create correspondence between the feature maps and the rectangle categories as it does for object categories in object recognition. Moreover, we also add a fifth residual stage to the standard four stages of a residual CNN. A residual stage is a series of residual blocks with either the same number of features or the same spatial dimensions. The purpose of this fifth residual stage is reducing the output dimensionality of the convolutional stage from (1024, 7, 7) to (2048, 4, 4). This reduces by approximately 850k the number of weights of the fully-connected layer for the confidence scores, which helps to manage overfitting. An illustration of our residual network is shown in Figure 2. C. Managing Overfitting Despite the recent advances in network regularization and architectures improving the ease with which CNNs learn, training a deep network remains a challenge. The biggest difficulty comes from learning feature representations generalizing to the complete data distribution. Representing complex observation is particularly difficult, especially when the amount of data is small. The network can easily overfit on the training dataset if no proper care is taken while training. Avoiding overfitting then becomes a central concern in this case. One standard approach for preventing the network from overfitting is artificially increasing the amount of training data. The central concept in data augmentation is generating additional images from the existing one while keeping their class-specific characteristics. Each image is repetitively preprocessed by a series of class-preserving random transformations, each time generating a new image that resembles the original one. This preprocessing can be done either offline or on-line. In the former case, the training set containing both the original images and the newly generated ones is fixed and used in a standard way for training the network. In the latter case, the images are generated on-the-fly during training, and the network sees new images every iteration. We opted for the on-line approach because we did not need to save images on disk. The quality of the generated images highly depends on the choice of preprocessing. Using proper transformations can make a substantial difference to the performance of the network. We now elaborate on the ones that we used in our experiments. The transformations are presented according to their order in the preprocessing: 1) Standardization: From the original RGBD image, we estimate the depth normal N x, N y, N z. We then subtract the mean and divide by the standard deviation (computed from the training set) of each 7 channels. 2) Rotation: The image is rotated by a random angle uniformly sampled from the range [ 15, 15 ]. 3) Random center crop: A crop is taken from the center of the original image, translated by up to 50 pixels in both the horizontal and vertical directions. 4) Square scale: The crop is resized to using standard bilinear interpolation. 5) Color jitter: We randomly change the brightness, contrast and saturation with a blend uniformly sampled from [, 1.4]. 6) Lighting: We perform Krizhevsky s Fancy PCA color augmentation on all RGB-D-N x N y N z channels [24]. Note that since the grasp rectangles are spatially localized within the images, we have to perform the same preprocessing on them for preserving the proper grasp region labels. Another approach for preventing overfitting that is grow-

![distribution [25], the network initializes its weights by training on a large](/docs-images/80/81663512/images/5-1.jpg "external dataset.")






![random initialization [25]. We leave pre-training for future work. Figure 3.](/docs-images/80/81663512/images/5-8.jpg "Cornell dataset example images.")










.")








5 ing in popularity is pre-training on a large dataset. Instead of randomly initializing the weights by sampling them from a given distribution [25], the network initializes its weights by training on a large external dataset. This can be seen as a kind of expert-driven weight initialization, which can provide a better starting point for optimization than random weights. Although pre-training can improve performance, it adds other constraints. A large external dataset with observations sharing the same input modalities and similar characteristics must be available for pre-training to take place. This is not always the case, especially in our context with RGBD images. Observations must be diversified enough so that the network can learn general features usable for the original task. A large number of observations does not guaranty diversity per se. Pre-training on a large external dataset also substantially increases the training time, which would best be avoided by directly training on the original task. For these reasons, we do not use pre-training in this paper and rather use random initialization [25]. We leave pre-training for future work. Figure 3. Cornell dataset example images. The dataset contains a good variety of everyday objects, where each object is labeled with grasp rectangles identifying regions of high graspability. The Cornell task is difficult because not all good grasp regions are correctly labeled. D. Training Details B. Grasp Detection Training our residual network for solving the detection problem of Section III-A requires special considerations [4]. For each image, we select uniformly up to five ground truth rectangles in five different sub-regions. We construct a target confidence map that has confidence scores of 1 at the selected sub-regions and confidence scores of 0 at the other sub-regions. We then back-propagate the Euclidean distance loss function through the entire confidence map, but only through the selected grasp rectangles. We trained our residual network with the following hyperparameters. We used a batch size of 64, a weight decay of 05, momentum of 0.9 and Nesterov accelerated updates. We train for 200 epochs at a starting learning rate of 0.1, which is divided by 5 at epoch 60, 120 and 160. All training is performed on a single NVIDIA K80 GPU. The quality of the predicted grasp rectangle is computed using the rectangle metric [13]. Let R be the predicted } the set of positive rectangles rectangle and {R1,..., RK (ground truth). The localization is considered a success if the metric is positive for any ground truth rectangles Rk and a failure if it is zero for all of them. The metric computes two quantities: 1) Absolute angle difference: R(θ) Rk (θ) area(r Rk ) 2) Jaccard index: area(r Rk ) The metric is positive if both the absolute angle difference is lower than 30 and the Jaccard index is greater than 25%. We performed our experiments using 5-fold crossvalidation. For further reducing variance, we report the best overall score achievable over five cross-validation tries, along with the median. We have two learning scenarios in our experiments, where each reflects a way of making the folds during cross-validation. In the first one, we split the observations according to the images (as in standard crossvalidation). We refer to this experiment as image-wise splitting. In the second one, we split the observations according to the objects, gathering all images of each object in the same fold. We refer to this experiment as object-wise splitting. The first scenario examines the generalization performance for predicting new rectangle positions, orientations and sizes on already-seen objects. This is representative of a typical industrial context where the set of test objects is known beforehand. The second scenario studies the generalization performance for predicting rectangles on novel, unseen objects. This is representative of a typical everyday context for general purpose robots. Using both scenarios will give a IV. E XPERIMENTS In this section, we elaborate on our experiments and present our results on the Cornell dataset. A. Dataset The Cornell grasping dataset contains 885 Kinect RGBD images of 240 distinct everyday objects [13]. Each image is labeled with positive and negative grasp rectangles labeling both regions of good and bad graspability. Note that we only use the positive rectangles for training the network. As shown in Figure 3, the dataset contains a wide range of objects, each with rectangles of various dimensions, orientations and positions. The Cornell task is difficult because not all regions with high graspability are labeled, and the dataset has a small number of relatively complex input observations.
6 Table I CROSS-VALIDATION DETECTION RESULTS ON THE CORNELL DATASET. THE VALUES REPRESENT THE AVERAGE RECTANGLE METRIC ERROR (IN %) OVER FIVE FOLDS. Approaches Image-Wise Split Object-Wise Split Jiang et al. [13] HOG + ELM Kernel [14] SAE, struct. reg. two-stage [5] Two-stage closed-loop [16] Pre-trained AlexNet [4] NKM-N [15] AlexNet (ours) (19.21) (19.53) ResNet (ours) 15 (12.20) (12.26) Table II SPEED COMPARISON AT TEST TIME ON THE CORNELL DATASET IMAGES. Method Speed (fps) Jiang et al. [13] - NKM-N [15] < 1 SAE, struct. reg. two-stage [5] 7 HOG + ELM Kernel [14] 9 Two-stage closed-loop [16] 7.11 Pre-trained AlexNet [4] AlexNet (ours) ResNet (ours) 11.5 more in-depth evaluation of the model. C. Results The detection performances on the Cornell dataset of our residual network, along with other state-of-the-art approaches, are presented in Table I. We report both the best score and the median obtained over five repeated fivefold cross-validation experiments (the median is the value inside the parenthesis in Table I). We also report the speed performance at test time for each approach in Table II. The performance test includes both the pre-processing step (starting when the image is loaded from disk) and the network prediction time (up until the rectangle metric is computed). Our residual network obtained 15% and 11.86% rectangle metric errors for the image-wise and object-wise splits respectively, with a speed at test time of 11.5 frames per second (FPS). As comparison, Redmon et al. [4] who fine-tuned an Imagenet pre-trained AlexNet, obtained 12% and 12.9% rectangle metric error respectively, at a speed of FPS. An important difference between Redmon et al. s approach and ours is the number of training images. We trained our residual network with on-line data augmentation while Redmon et al. used off-line data augmentation. They generated 3000 images per training observations, which resulted in a training fold containing 2,124,000 unique images. They then fine-tuned their network for 25 epochs, which amounted to processing 53.1 M images. In our case, we trained for 200 epochs on the original fold size of 708 images, but generated new observations at each epoch. Our network only Fold 1 Fold 2 Fold 3 Fold 4 Fold 5 Fold 1 Rectangle Metric Fold 2 Rectangle Metric Fold 3 Rectangle Metric Fold 4 Rectangle Metric Fold 5 Rectangle Metric Figure 4. Learning behavior of our residual network during crossvalidation training. The left column shows both the train and test loss convergence for each fold, while the right column shows the rectangle metric error convergence. The small difference between the train and test loss indicates no overfitting. sees a total of 141,600 images, which corresponds to 15x fewer observations. Using a single NVIDIA K80 GPU, it only took around 6 hours to train our network on one fold. Our framework is more difficult, but also more convenient because it is less computationally demanding. To understand the difference between our training framework with on-line data augmentation and Redmon et al. s training framework with off-line data augmentation, we fined-tuned an ImageNet pre-trained AlexNet on the Cornell dataset. Note that we used the same hyper-parameters and the same input modalities (RGD) as reported in [4] to train the network. We obtained 18.30% and 18.68% rectangle metric errors for the image-wise and object-wise splits, which represents absolute performance reductions of 6.30% and 5.78% respectively. Although our residual network performances are relatively similar to Redmon et al. s AlexNet
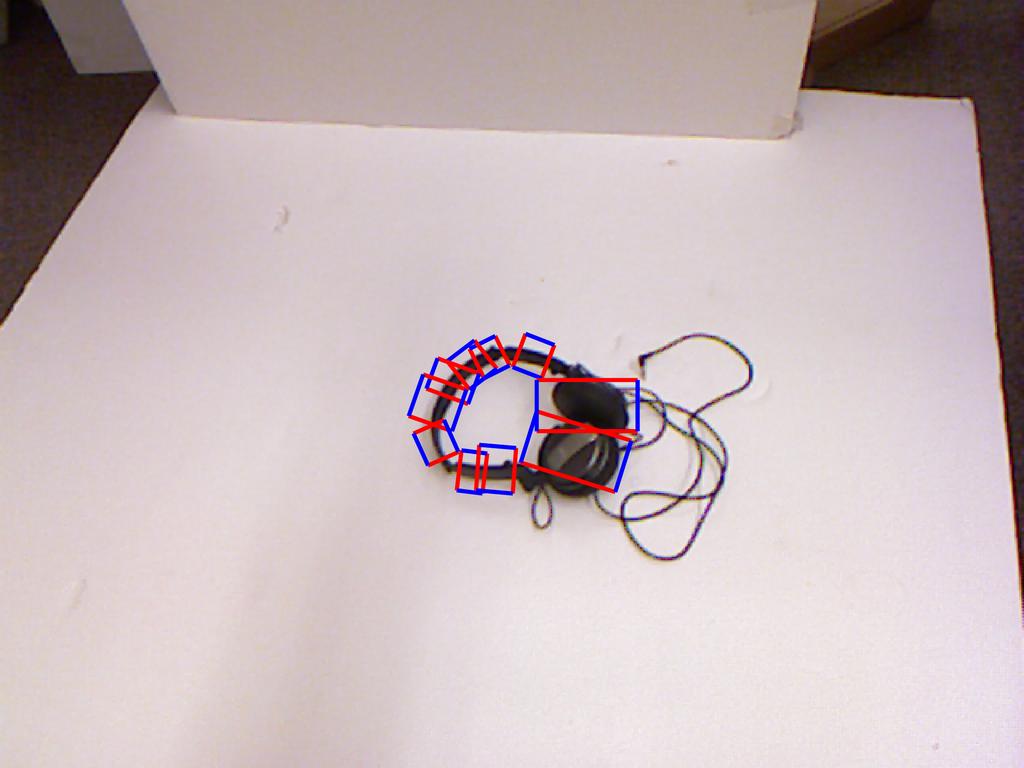
7 performances, they are more different when compared to AlexNet performances on our training framework. Another approach worth mentioning is NKM-N, which has the best performances in both the image-wise and objectwise splits. This approach is however not usable for real-time processing because of its speed performance at test time. As presented in Table II, NKM-N takes more than a minute to process an image while our approach processes around 11.5 images per second. This is due to the tedious slidingwindows technique used by the authors for detection, which is more computationally demanding than the optimized 2D convolutions in CNNs. Network Prediction Ground Truth V. DISCUSSION One important aspect to consider when training CNNs is overfitting. Since deep neural networks usually have millions of parameters, they can easily overfit to the training data, especially when the number of observations is small. A straightforward test to perform for monitoring overfitting is looking at the distance between the train and test loss. Figure 4 presents the learning behavior of our residual network for each cross-validation fold. As shown in the left column, the train and test losses have a steady and similar decrease. Even though we do not use Dropout [26] to further regularize our network, these results show that the network is not in an overfitting regime. Due to miss-labeling in the dataset, the rectangle metric performance can occasionally vary from one epoch to another. As shown in the right column of Figure 4, the score sometimes significantly changes even though the train loss varies slowly. To understand why this is the case, we show in Figure 5 an example of predicted grasp rectangles from our residual network. According to the rectangle metric, the top example is considered a success, while the middle and bottom ones are considered failures. It is however conceivable that grasping the scissors using the candidate grasp rectangle would be a success even though the rectangle metric labels the detection as a failure. The predicted grasp rectangles are indeed too wide to give a good Jaccard index, but a gripper with two parallel plate-gripping fingers would have succeeded by pinching the object. Although the rectangle metric is convenient due to its resemblance to bounding box in vision, it can add non-existing physical constraints that negatively bias the reported performances. As we previously mentioned in Section III-C, we did not use pre-training in our residual network experiments. We instead randomly initialized the weights following He et al. s initialization approach [25]. This leaves open the possibility of pre-training our network on a large external RGBD dataset prior to training it on the Cornell task. For instance, the recently published grasping dataset containing around 650,000 grasp attempts would be a candidate of choice [17]. The authors gathered Kinect RGBD images of grasp attempts from various camera placements and Figure 5. Examples of detection success (top example) and failures (middle and bottom). The left column shows the candidate rectangles predicted by our network, while the right column shows the ground truth. A rectangle with a large width indicates that the network is confident about its prediction. Although the middle example is considered a failure according to the rectangle metric, the grasping system would still have been able to grasp the scissors using the predicted rectangle. hardware platforms using up to 14 robotic manipulators. Although the dataset is large by nowadays standards (around 886 GB) and training would require several GPUs, features learned on these highly diverse observations would be general and usable in several grasping contexts. VI. CONCLUSION The grasp localization module is an essential element for automating the grasping of ordinary, everyday objects. Generally viewed as a vision detection problem, its goal is localizing regions of high graspability by interpreting light and depth information. Recent developments in deep learning have made deep convolutional neural networks the model of choice for solving vision-related problems. In this paper, we investigated the use of residual networks for grasp localization. Our preliminary experiments have shown that the global average pooling layer at the end of the
8 convolutional stage in a standard residual network removes the spatial correlation of the back-propagated error signal. The network cannot spatially correlate its mistakes on the confidence map and learn to localize good grasp regions. We proposed applying the global average pooling layer only on the grasp rectangle predictions and use a flattening layer for the confidence scores. For reducing overfitting due to flattening high order tensors, we also proposed reducing the spatial size of the feature maps prior to flattening by increasing the number of residual stages. Our residual network obtained state-of-the-art performances on the Cornell dataset without pre-training and with on-line data augmentation. Our network obtained better performances with faster training time, convergence rate and a high prediction speed. Pretraining our residual network on a large RGBD dataset then fine-tuning it on the Cornell dataset would be an interesting avenue for future work. ACKNOWLEDGMENT We gratefully acknowledge the support of NVIDIA Corporation for providing the Tesla K80 GPUs for our experiments. REFERENCES [1] C. Eppner, S. Höfer, R. Jonschkowski, R. Martın-Martın, A. Sieverling, V. Wall, and O. Brock, Lessons from the amazon picking challenge: Four aspects of building robotic systems, in RSS, [2] D. Kappler, J. Bohg, and S. Schaal, Leveraging big data for grasp planning, in ICRA. IEEE, 2015, pp [3] L. Pinto and A. Gupta, Supersizing self-supervision: Learning to grasp from 50k tries and 700 robot hours, in ICRA, [4] J. Redmon and A. Angelova, Real-time grasp detection using convolutional neural networks, in ICRA, 2015, pp [5] I. Lenz, H. Lee, and A. Saxena, Deep learning for detecting robotic grasps, IJRR, vol. 34, no. 4-5, pp , [6] A. Saxena, J. Driemeyer, and A. Y. Ng, Robotic grasping of novel objects using vision, IJRR, vol. 27, no. 2, pp , [7] C. Dong, C. C. Loy, K. He, and X. Tang, Image superresolution using deep convolutional networks, PAMI, vol. 38, no. 2, pp , [8] S. Ren, K. He, R. Girshick, and J. Sun, Faster r-cnn: Towards real-time object detection with region proposal networks, in NIPS, 2015, pp [9] Y. LeCun, B. Boser, J. S. Denker, D. Henderson, R. E. Howard, W. Hubbard, and L. D. Jackel, Backpropagation applied to handwritten zip code recognition, Neural computation, vol. 1, no. 4, pp , [10] B. León, S. Ulbrich, R. Diankov, G. Puche, M. Przybylski, A. Morales, T. Asfour, S. Moisio, J. Bohg, J. Kuffner et al., Opengrasp: a toolkit for robot grasping simulation, in SIMPAR. Springer, 2010, pp [11] A. T. Miller and P. K. Allen, Graspit! a versatile simulator for robotic grasping, IEEE Robotics & Automation Magazine, vol. 11, no. 4, pp , [12] R. Detry, C. H. Ek, M. Madry, and D. Kragic, Learning a dictionary of prototypical grasp-predicting parts from grasping experience, in ICRA, 2013, pp [13] Y. Jiang, S. Moseson, and A. Saxena, Efficient grasping from RGBD images: Learning using a new rectangle representation, in ICRA, 2011, pp [14] C. Sun, Y. Yu, H. Liu, and J. Gu, Robotic grasp detection using extreme learning machine, in ROBIO. IEEE, 2015, pp [15] L. Trottier, P. Giguère, and B. Chaib-draa, Sparse dictionary learning for identifying grasp locations, in WACV, [16] Z. Wang, Z. Li, B. Wang, and H. Liu, Robot grasp detection using multimodal deep convolutional neural networks, Advances in Mechanical Engineering, vol. 8, no. 9, p , [17] S. Levine, P. Pastor, A. Krizhevsky, and D. Quillen, Learning hand-eye coordination for robotic grasping with largescale data collection, in International Symposium on Experimental Robotics, [18] A. Saxena, J. Driemeyer, J. Kearns, and A. Y. Ng, Robotic grasping of novel objects, in NIPS. MIT Press, 2006, pp [19] Q. V. Le, D. Kamm, A. F. Kara, and A. Y. Ng, Learning to grasp objects with multiple contact points, in ICRA. IEEE, 2010, pp [20] K. He, X. Zhang, S. Ren, and J. Sun, Deep residual learning for image recognition, in CVPR, 2016, pp [21] R. K. Srivastava, K. Greff, and J. Schmidhuber, Highway networks, arxiv preprint arxiv: , [22] K. He, X. Zhang, S. Ren, and J. Sun, Identity mappings in deep residual networks, arxiv preprint arxiv: , [23] S. Ioffe and C. Szegedy, Batch normalization: Accelerating deep network training by reducing internal covariate shift, arxiv preprint arxiv: , [24] A. Krizhevsky, I. Sutskever, and G. E. Hinton, Imagenet classification with deep convolutional neural networks, in NIPS, 2012, pp [25] K. He, X. Zhang, S. Ren, and J. Sun, Delving deep into rectifiers: Surpassing human-level performance on imagenet classification, in ICCV, 2015, pp [26] N. Srivastava, G. E. Hinton, A. Krizhevsky, I. Sutskever, and R. Salakhutdinov, Dropout: a simple way to prevent neural networks from overfitting. JMLR, vol. 15, no. 1, pp , 2014.
Real-Time Grasp Detection Using Convolutional Neural Networks
 Real-Time Grasp Detection Using Convolutional Neural Networks Joseph Redmon 1, Anelia Angelova 2 Abstract We present an accurate, real-time approach to robotic grasp detection based on convolutional neural
Real-Time Grasp Detection Using Convolutional Neural Networks Joseph Redmon 1, Anelia Angelova 2 Abstract We present an accurate, real-time approach to robotic grasp detection based on convolutional neural
Study of Residual Networks for Image Recognition
 Study of Residual Networks for Image Recognition Mohammad Sadegh Ebrahimi Stanford University sadegh@stanford.edu Hossein Karkeh Abadi Stanford University hosseink@stanford.edu Abstract Deep neural networks
Study of Residual Networks for Image Recognition Mohammad Sadegh Ebrahimi Stanford University sadegh@stanford.edu Hossein Karkeh Abadi Stanford University hosseink@stanford.edu Abstract Deep neural networks
Deep Learning for Computer Vision II
 IIIT Hyderabad Deep Learning for Computer Vision II C. V. Jawahar Paradigm Shift Feature Extraction (SIFT, HoG, ) Part Models / Encoding Classifier Sparrow Feature Learning Classifier Sparrow L 1 L 2 L
IIIT Hyderabad Deep Learning for Computer Vision II C. V. Jawahar Paradigm Shift Feature Extraction (SIFT, HoG, ) Part Models / Encoding Classifier Sparrow Feature Learning Classifier Sparrow L 1 L 2 L
Convolutional Neural Networks. Computer Vision Jia-Bin Huang, Virginia Tech
 Convolutional Neural Networks Computer Vision Jia-Bin Huang, Virginia Tech Today s class Overview Convolutional Neural Network (CNN) Training CNN Understanding and Visualizing CNN Image Categorization:
Convolutional Neural Networks Computer Vision Jia-Bin Huang, Virginia Tech Today s class Overview Convolutional Neural Network (CNN) Training CNN Understanding and Visualizing CNN Image Categorization:
Learning from Successes and Failures to Grasp Objects with a Vacuum Gripper
 Learning from Successes and Failures to Grasp Objects with a Vacuum Gripper Luca Monorchio, Daniele Evangelista, Marco Imperoli, and Alberto Pretto Abstract In this work we present an empirical approach
Learning from Successes and Failures to Grasp Objects with a Vacuum Gripper Luca Monorchio, Daniele Evangelista, Marco Imperoli, and Alberto Pretto Abstract In this work we present an empirical approach
Machine Learning. Deep Learning. Eric Xing (and Pengtao Xie) , Fall Lecture 8, October 6, Eric CMU,
 , Fall Lecture 8, October 6, Eric CMU,") Machine Learning 10-701, Fall 2015 Deep Learning Eric Xing (and Pengtao Xie) Lecture 8, October 6, 2015 Eric Xing @ CMU, 2015 1 A perennial challenge in computer vision: feature engineering SIFT Spin image
Machine Learning 10-701, Fall 2015 Deep Learning Eric Xing (and Pengtao Xie) Lecture 8, October 6, 2015 Eric Xing @ CMU, 2015 1 A perennial challenge in computer vision: feature engineering SIFT Spin image
Deep Learning in Visual Recognition. Thanks Da Zhang for the slides
 Deep Learning in Visual Recognition Thanks Da Zhang for the slides Deep Learning is Everywhere 2 Roadmap Introduction Convolutional Neural Network Application Image Classification Object Detection Object
Deep Learning in Visual Recognition Thanks Da Zhang for the slides Deep Learning is Everywhere 2 Roadmap Introduction Convolutional Neural Network Application Image Classification Object Detection Object
COMP9444 Neural Networks and Deep Learning 7. Image Processing. COMP9444 c Alan Blair, 2017
 COMP9444 Neural Networks and Deep Learning 7. Image Processing COMP9444 17s2 Image Processing 1 Outline Image Datasets and Tasks Convolution in Detail AlexNet Weight Initialization Batch Normalization
COMP9444 Neural Networks and Deep Learning 7. Image Processing COMP9444 17s2 Image Processing 1 Outline Image Datasets and Tasks Convolution in Detail AlexNet Weight Initialization Batch Normalization
HENet: A Highly Efficient Convolutional Neural. Networks Optimized for Accuracy, Speed and Storage
 HENet: A Highly Efficient Convolutional Neural Networks Optimized for Accuracy, Speed and Storage Qiuyu Zhu Shanghai University zhuqiuyu@staff.shu.edu.cn Ruixin Zhang Shanghai University chriszhang96@shu.edu.cn
HENet: A Highly Efficient Convolutional Neural Networks Optimized for Accuracy, Speed and Storage Qiuyu Zhu Shanghai University zhuqiuyu@staff.shu.edu.cn Ruixin Zhang Shanghai University chriszhang96@shu.edu.cn
Inception and Residual Networks. Hantao Zhang. Deep Learning with Python.
 Inception and Residual Networks Hantao Zhang Deep Learning with Python https://en.wikipedia.org/wiki/residual_neural_network Deep Neural Network Progress from Large Scale Visual Recognition Challenge (ILSVRC)
Inception and Residual Networks Hantao Zhang Deep Learning with Python https://en.wikipedia.org/wiki/residual_neural_network Deep Neural Network Progress from Large Scale Visual Recognition Challenge (ILSVRC)
Spatial Localization and Detection. Lecture 8-1
 Lecture 8: Spatial Localization and Detection Lecture 8-1 Administrative - Project Proposals were due on Saturday Homework 2 due Friday 2/5 Homework 1 grades out this week Midterm will be in-class on Wednesday
Lecture 8: Spatial Localization and Detection Lecture 8-1 Administrative - Project Proposals were due on Saturday Homework 2 due Friday 2/5 Homework 1 grades out this week Midterm will be in-class on Wednesday
Channel Locality Block: A Variant of Squeeze-and-Excitation
 Channel Locality Block: A Variant of Squeeze-and-Excitation 1 st Huayu Li Northern Arizona University Flagstaff, United State Northern Arizona University hl459@nau.edu arxiv:1901.01493v1 [cs.lg] 6 Jan
Channel Locality Block: A Variant of Squeeze-and-Excitation 1 st Huayu Li Northern Arizona University Flagstaff, United State Northern Arizona University hl459@nau.edu arxiv:1901.01493v1 [cs.lg] 6 Jan
Deep Learning with Tensorflow AlexNet
 Machine Learning and Computer Vision Group Deep Learning with Tensorflow http://cvml.ist.ac.at/courses/dlwt_w17/ AlexNet Krizhevsky, Alex, Ilya Sutskever, and Geoffrey E. Hinton, "Imagenet classification
Machine Learning and Computer Vision Group Deep Learning with Tensorflow http://cvml.ist.ac.at/courses/dlwt_w17/ AlexNet Krizhevsky, Alex, Ilya Sutskever, and Geoffrey E. Hinton, "Imagenet classification
Machine Learning 13. week
 Machine Learning 13. week Deep Learning Convolutional Neural Network Recurrent Neural Network 1 Why Deep Learning is so Popular? 1. Increase in the amount of data Thanks to the Internet, huge amount of
Machine Learning 13. week Deep Learning Convolutional Neural Network Recurrent Neural Network 1 Why Deep Learning is so Popular? 1. Increase in the amount of data Thanks to the Internet, huge amount of
Know your data - many types of networks
 Architectures Know your data - many types of networks Fixed length representation Variable length representation Online video sequences, or samples of different sizes Images Specific architectures for
Architectures Know your data - many types of networks Fixed length representation Variable length representation Online video sequences, or samples of different sizes Images Specific architectures for
Classification of objects from Video Data (Group 30)
") Classification of objects from Video Data (Group 30) Sheallika Singh 12665 Vibhuti Mahajan 12792 Aahitagni Mukherjee 12001 M Arvind 12385 1 Motivation Video surveillance has been employed for a long time
Classification of objects from Video Data (Group 30) Sheallika Singh 12665 Vibhuti Mahajan 12792 Aahitagni Mukherjee 12001 M Arvind 12385 1 Motivation Video surveillance has been employed for a long time
Structured Prediction using Convolutional Neural Networks
 Overview Structured Prediction using Convolutional Neural Networks Bohyung Han bhhan@postech.ac.kr Computer Vision Lab. Convolutional Neural Networks (CNNs) Structured predictions for low level computer
Overview Structured Prediction using Convolutional Neural Networks Bohyung Han bhhan@postech.ac.kr Computer Vision Lab. Convolutional Neural Networks (CNNs) Structured predictions for low level computer
Supplementary material for Analyzing Filters Toward Efficient ConvNet
 Supplementary material for Analyzing Filters Toward Efficient Net Takumi Kobayashi National Institute of Advanced Industrial Science and Technology, Japan takumi.kobayashi@aist.go.jp A. Orthonormal Steerable
Supplementary material for Analyzing Filters Toward Efficient Net Takumi Kobayashi National Institute of Advanced Industrial Science and Technology, Japan takumi.kobayashi@aist.go.jp A. Orthonormal Steerable
arxiv: v1 [cs.cv] 20 Dec 2016
![arxiv: v1 [cs.cv] 20 Dec 2016](/thumbs/73/68905842.jpg "arxiv: v1 [cs.cv] 20 Dec 2016") End-to-End Pedestrian Collision Warning System based on a Convolutional Neural Network with Semantic Segmentation arxiv:1612.06558v1 [cs.cv] 20 Dec 2016 Heechul Jung heechul@dgist.ac.kr Min-Kook Choi mkchoi@dgist.ac.kr
End-to-End Pedestrian Collision Warning System based on a Convolutional Neural Network with Semantic Segmentation arxiv:1612.06558v1 [cs.cv] 20 Dec 2016 Heechul Jung heechul@dgist.ac.kr Min-Kook Choi mkchoi@dgist.ac.kr
Real-time Object Detection CS 229 Course Project
 Real-time Object Detection CS 229 Course Project Zibo Gong 1, Tianchang He 1, and Ziyi Yang 1 1 Department of Electrical Engineering, Stanford University December 17, 2016 Abstract Objection detection
Real-time Object Detection CS 229 Course Project Zibo Gong 1, Tianchang He 1, and Ziyi Yang 1 1 Department of Electrical Engineering, Stanford University December 17, 2016 Abstract Objection detection
Kaggle Data Science Bowl 2017 Technical Report
 Kaggle Data Science Bowl 2017 Technical Report qfpxfd Team May 11, 2017 1 Team Members Table 1: Team members Name E-Mail University Jia Ding dingjia@pku.edu.cn Peking University, Beijing, China Aoxue Li
Kaggle Data Science Bowl 2017 Technical Report qfpxfd Team May 11, 2017 1 Team Members Table 1: Team members Name E-Mail University Jia Ding dingjia@pku.edu.cn Peking University, Beijing, China Aoxue Li
Deep Learning. Deep Learning provided breakthrough results in speech recognition and image classification. Why?
 Data Mining Deep Learning Deep Learning provided breakthrough results in speech recognition and image classification. Why? Because Speech recognition and image classification are two basic examples of
Data Mining Deep Learning Deep Learning provided breakthrough results in speech recognition and image classification. Why? Because Speech recognition and image classification are two basic examples of
Rotation Invariance Neural Network
 Rotation Invariance Neural Network Shiyuan Li Abstract Rotation invariance and translate invariance have great values in image recognition. In this paper, we bring a new architecture in convolutional neural
Rotation Invariance Neural Network Shiyuan Li Abstract Rotation invariance and translate invariance have great values in image recognition. In this paper, we bring a new architecture in convolutional neural
Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks
 Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks Si Chen The George Washington University sichen@gwmail.gwu.edu Meera Hahn Emory University mhahn7@emory.edu Mentor: Afshin
Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks Si Chen The George Washington University sichen@gwmail.gwu.edu Meera Hahn Emory University mhahn7@emory.edu Mentor: Afshin
CMU Lecture 18: Deep learning and Vision: Convolutional neural networks. Teacher: Gianni A. Di Caro
 CMU 15-781 Lecture 18: Deep learning and Vision: Convolutional neural networks Teacher: Gianni A. Di Caro DEEP, SHALLOW, CONNECTED, SPARSE? Fully connected multi-layer feed-forward perceptrons: More powerful
CMU 15-781 Lecture 18: Deep learning and Vision: Convolutional neural networks Teacher: Gianni A. Di Caro DEEP, SHALLOW, CONNECTED, SPARSE? Fully connected multi-layer feed-forward perceptrons: More powerful
3D Densely Convolutional Networks for Volumetric Segmentation. Toan Duc Bui, Jitae Shin, and Taesup Moon
 3D Densely Convolutional Networks for Volumetric Segmentation Toan Duc Bui, Jitae Shin, and Taesup Moon School of Electronic and Electrical Engineering, Sungkyunkwan University, Republic of Korea arxiv:1709.03199v2
3D Densely Convolutional Networks for Volumetric Segmentation Toan Duc Bui, Jitae Shin, and Taesup Moon School of Electronic and Electrical Engineering, Sungkyunkwan University, Republic of Korea arxiv:1709.03199v2
Efficient Grasping from RGBD Images: Learning Using a New Rectangle Representation. Yun Jiang, Stephen Moseson, Ashutosh Saxena Cornell University
 Efficient Grasping from RGBD Images: Learning Using a New Rectangle Representation Yun Jiang, Stephen Moseson, Ashutosh Saxena Cornell University Problem Goal: Figure out a way to pick up the object. Approach
Efficient Grasping from RGBD Images: Learning Using a New Rectangle Representation Yun Jiang, Stephen Moseson, Ashutosh Saxena Cornell University Problem Goal: Figure out a way to pick up the object. Approach
Residual Networks for Tiny ImageNet
 Residual Networks for Tiny ImageNet Hansohl Kim Stanford University hansohl@stanford.edu Abstract Residual networks are powerful tools for image classification, as demonstrated in ILSVRC 2015 [5]. We explore
Residual Networks for Tiny ImageNet Hansohl Kim Stanford University hansohl@stanford.edu Abstract Residual networks are powerful tools for image classification, as demonstrated in ILSVRC 2015 [5]. We explore
An Exploration of Computer Vision Techniques for Bird Species Classification
 An Exploration of Computer Vision Techniques for Bird Species Classification Anne L. Alter, Karen M. Wang December 15, 2017 Abstract Bird classification, a fine-grained categorization task, is a complex
An Exploration of Computer Vision Techniques for Bird Species Classification Anne L. Alter, Karen M. Wang December 15, 2017 Abstract Bird classification, a fine-grained categorization task, is a complex
In-Place Activated BatchNorm for Memory- Optimized Training of DNNs
 In-Place Activated BatchNorm for Memory- Optimized Training of DNNs Samuel Rota Bulò, Lorenzo Porzi, Peter Kontschieder Mapillary Research Paper: https://arxiv.org/abs/1712.02616 Code: https://github.com/mapillary/inplace_abn
In-Place Activated BatchNorm for Memory- Optimized Training of DNNs Samuel Rota Bulò, Lorenzo Porzi, Peter Kontschieder Mapillary Research Paper: https://arxiv.org/abs/1712.02616 Code: https://github.com/mapillary/inplace_abn
Traffic Multiple Target Detection on YOLOv2
 Traffic Multiple Target Detection on YOLOv2 Junhong Li, Huibin Ge, Ziyang Zhang, Weiqin Wang, Yi Yang Taiyuan University of Technology, Shanxi, 030600, China wangweiqin1609@link.tyut.edu.cn Abstract Background
Traffic Multiple Target Detection on YOLOv2 Junhong Li, Huibin Ge, Ziyang Zhang, Weiqin Wang, Yi Yang Taiyuan University of Technology, Shanxi, 030600, China wangweiqin1609@link.tyut.edu.cn Abstract Background
Finding Tiny Faces Supplementary Materials
 Finding Tiny Faces Supplementary Materials Peiyun Hu, Deva Ramanan Robotics Institute Carnegie Mellon University {peiyunh,deva}@cs.cmu.edu 1. Error analysis Quantitative analysis We plot the distribution
Finding Tiny Faces Supplementary Materials Peiyun Hu, Deva Ramanan Robotics Institute Carnegie Mellon University {peiyunh,deva}@cs.cmu.edu 1. Error analysis Quantitative analysis We plot the distribution
Proceedings of the International MultiConference of Engineers and Computer Scientists 2018 Vol I IMECS 2018, March 14-16, 2018, Hong Kong
 , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong TABLE I CLASSIFICATION ACCURACY OF DIFFERENT PRE-TRAINED MODELS ON THE TEST DATA
, March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong TABLE I CLASSIFICATION ACCURACY OF DIFFERENT PRE-TRAINED MODELS ON THE TEST DATA
Fully Convolutional Network for Depth Estimation and Semantic Segmentation
 Fully Convolutional Network for Depth Estimation and Semantic Segmentation Yokila Arora ICME Stanford University yarora@stanford.edu Ishan Patil Department of Electrical Engineering Stanford University
Fully Convolutional Network for Depth Estimation and Semantic Segmentation Yokila Arora ICME Stanford University yarora@stanford.edu Ishan Patil Department of Electrical Engineering Stanford University
COMP 551 Applied Machine Learning Lecture 16: Deep Learning
 COMP 551 Applied Machine Learning Lecture 16: Deep Learning Instructor: Ryan Lowe (ryan.lowe@cs.mcgill.ca) Slides mostly by: Class web page: www.cs.mcgill.ca/~hvanho2/comp551 Unless otherwise noted, all
COMP 551 Applied Machine Learning Lecture 16: Deep Learning Instructor: Ryan Lowe (ryan.lowe@cs.mcgill.ca) Slides mostly by: Class web page: www.cs.mcgill.ca/~hvanho2/comp551 Unless otherwise noted, all
Convolutional Neural Networks
 Lecturer: Barnabas Poczos Introduction to Machine Learning (Lecture Notes) Convolutional Neural Networks Disclaimer: These notes have not been subjected to the usual scrutiny reserved for formal publications.
Lecturer: Barnabas Poczos Introduction to Machine Learning (Lecture Notes) Convolutional Neural Networks Disclaimer: These notes have not been subjected to the usual scrutiny reserved for formal publications.
Deep learning for dense per-pixel prediction. Chunhua Shen The University of Adelaide, Australia
 Deep learning for dense per-pixel prediction Chunhua Shen The University of Adelaide, Australia Image understanding Classification error Convolution Neural Networks 0.3 0.2 0.1 Image Classification [Krizhevsky
Deep learning for dense per-pixel prediction Chunhua Shen The University of Adelaide, Australia Image understanding Classification error Convolution Neural Networks 0.3 0.2 0.1 Image Classification [Krizhevsky
A Novel Weight-Shared Multi-Stage Network Architecture of CNNs for Scale Invariance
 JOURNAL OF L A TEX CLASS FILES, VOL. 14, NO. 8, AUGUST 2015 1 A Novel Weight-Shared Multi-Stage Network Architecture of CNNs for Scale Invariance Ryo Takahashi, Takashi Matsubara, Member, IEEE, and Kuniaki
JOURNAL OF L A TEX CLASS FILES, VOL. 14, NO. 8, AUGUST 2015 1 A Novel Weight-Shared Multi-Stage Network Architecture of CNNs for Scale Invariance Ryo Takahashi, Takashi Matsubara, Member, IEEE, and Kuniaki
YOLO9000: Better, Faster, Stronger
 YOLO9000: Better, Faster, Stronger Date: January 24, 2018 Prepared by Haris Khan (University of Toronto) Haris Khan CSC2548: Machine Learning in Computer Vision 1 Overview 1. Motivation for one-shot object
YOLO9000: Better, Faster, Stronger Date: January 24, 2018 Prepared by Haris Khan (University of Toronto) Haris Khan CSC2548: Machine Learning in Computer Vision 1 Overview 1. Motivation for one-shot object
Facial Expression Classification with Random Filters Feature Extraction
 Facial Expression Classification with Random Filters Feature Extraction Mengye Ren Facial Monkey mren@cs.toronto.edu Zhi Hao Luo It s Me lzh@cs.toronto.edu I. ABSTRACT In our work, we attempted to tackle
Facial Expression Classification with Random Filters Feature Extraction Mengye Ren Facial Monkey mren@cs.toronto.edu Zhi Hao Luo It s Me lzh@cs.toronto.edu I. ABSTRACT In our work, we attempted to tackle
Deep Learning With Noise
 Deep Learning With Noise Yixin Luo Computer Science Department Carnegie Mellon University yixinluo@cs.cmu.edu Fan Yang Department of Mathematical Sciences Carnegie Mellon University fanyang1@andrew.cmu.edu
Deep Learning With Noise Yixin Luo Computer Science Department Carnegie Mellon University yixinluo@cs.cmu.edu Fan Yang Department of Mathematical Sciences Carnegie Mellon University fanyang1@andrew.cmu.edu
Deep Learning. Visualizing and Understanding Convolutional Networks. Christopher Funk. Pennsylvania State University.
 Visualizing and Understanding Convolutional Networks Christopher Pennsylvania State University February 23, 2015 Some Slide Information taken from Pierre Sermanet (Google) presentation on and Computer
Visualizing and Understanding Convolutional Networks Christopher Pennsylvania State University February 23, 2015 Some Slide Information taken from Pierre Sermanet (Google) presentation on and Computer
3D model classification using convolutional neural network
 3D model classification using convolutional neural network JunYoung Gwak Stanford jgwak@cs.stanford.edu Abstract Our goal is to classify 3D models directly using convolutional neural network. Most of existing
3D model classification using convolutional neural network JunYoung Gwak Stanford jgwak@cs.stanford.edu Abstract Our goal is to classify 3D models directly using convolutional neural network. Most of existing
Content-Based Image Recovery
 Content-Based Image Recovery Hong-Yu Zhou and Jianxin Wu National Key Laboratory for Novel Software Technology Nanjing University, China zhouhy@lamda.nju.edu.cn wujx2001@nju.edu.cn Abstract. We propose
Content-Based Image Recovery Hong-Yu Zhou and Jianxin Wu National Key Laboratory for Novel Software Technology Nanjing University, China zhouhy@lamda.nju.edu.cn wujx2001@nju.edu.cn Abstract. We propose
Janitor Bot - Detecting Light Switches Jiaqi Guo, Haizi Yu December 10, 2010
 1. Introduction Janitor Bot - Detecting Light Switches Jiaqi Guo, Haizi Yu December 10, 2010 The demand for janitorial robots has gone up with the rising affluence and increasingly busy lifestyles of people
1. Introduction Janitor Bot - Detecting Light Switches Jiaqi Guo, Haizi Yu December 10, 2010 The demand for janitorial robots has gone up with the rising affluence and increasingly busy lifestyles of people
On the Effectiveness of Neural Networks Classifying the MNIST Dataset
 On the Effectiveness of Neural Networks Classifying the MNIST Dataset Carter W. Blum March 2017 1 Abstract Convolutional Neural Networks (CNNs) are the primary driver of the explosion of computer vision.
On the Effectiveness of Neural Networks Classifying the MNIST Dataset Carter W. Blum March 2017 1 Abstract Convolutional Neural Networks (CNNs) are the primary driver of the explosion of computer vision.
ImageNet Classification with Deep Convolutional Neural Networks
 ImageNet Classification with Deep Convolutional Neural Networks Alex Krizhevsky Ilya Sutskever Geoffrey Hinton University of Toronto Canada Paper with same name to appear in NIPS 2012 Main idea Architecture
ImageNet Classification with Deep Convolutional Neural Networks Alex Krizhevsky Ilya Sutskever Geoffrey Hinton University of Toronto Canada Paper with same name to appear in NIPS 2012 Main idea Architecture
Convolutional Neural Network-based Real-time ROV Detection Using Forward-looking Sonar Image
 Convolutional Neural Network-based Real-time ROV Detection Using Forward-looking Sonar Image 10.3 Juhwan Kim and Son-Cheol Yu Dept. of Creative IT Engineering Pohang University of Science and Technology
Convolutional Neural Network-based Real-time ROV Detection Using Forward-looking Sonar Image 10.3 Juhwan Kim and Son-Cheol Yu Dept. of Creative IT Engineering Pohang University of Science and Technology
Yiqi Yan. May 10, 2017
 Yiqi Yan May 10, 2017 P a r t I F u n d a m e n t a l B a c k g r o u n d s Convolution Single Filter Multiple Filters 3 Convolution: case study, 2 filters 4 Convolution: receptive field receptive field
Yiqi Yan May 10, 2017 P a r t I F u n d a m e n t a l B a c k g r o u n d s Convolution Single Filter Multiple Filters 3 Convolution: case study, 2 filters 4 Convolution: receptive field receptive field
Object Detection and Its Implementation on Android Devices
 Object Detection and Its Implementation on Android Devices Zhongjie Li Stanford University 450 Serra Mall, Stanford, CA 94305 jay2015@stanford.edu Rao Zhang Stanford University 450 Serra Mall, Stanford,
Object Detection and Its Implementation on Android Devices Zhongjie Li Stanford University 450 Serra Mall, Stanford, CA 94305 jay2015@stanford.edu Rao Zhang Stanford University 450 Serra Mall, Stanford,
Residual Networks And Attention Models. cs273b Recitation 11/11/2016. Anna Shcherbina
 Residual Networks And Attention Models cs273b Recitation 11/11/2016 Anna Shcherbina Introduction to ResNets Introduced in 2015 by Microsoft Research Deep Residual Learning for Image Recognition (He, Zhang,
Residual Networks And Attention Models cs273b Recitation 11/11/2016 Anna Shcherbina Introduction to ResNets Introduced in 2015 by Microsoft Research Deep Residual Learning for Image Recognition (He, Zhang,
Elastic Neural Networks for Classification
 Elastic Neural Networks for Classification Yi Zhou 1, Yue Bai 1, Shuvra S. Bhattacharyya 1, 2 and Heikki Huttunen 1 1 Tampere University of Technology, Finland, 2 University of Maryland, USA arxiv:1810.00589v3
Elastic Neural Networks for Classification Yi Zhou 1, Yue Bai 1, Shuvra S. Bhattacharyya 1, 2 and Heikki Huttunen 1 1 Tampere University of Technology, Finland, 2 University of Maryland, USA arxiv:1810.00589v3
CENG 783. Special topics in. Deep Learning. AlchemyAPI. Week 11. Sinan Kalkan
 CENG 783 Special topics in Deep Learning AlchemyAPI Week 11 Sinan Kalkan TRAINING A CNN Fig: http://www.robots.ox.ac.uk/~vgg/practicals/cnn/ Feed-forward pass Note that this is written in terms of the
CENG 783 Special topics in Deep Learning AlchemyAPI Week 11 Sinan Kalkan TRAINING A CNN Fig: http://www.robots.ox.ac.uk/~vgg/practicals/cnn/ Feed-forward pass Note that this is written in terms of the
Computer Vision Lecture 16
 Computer Vision Lecture 16 Deep Learning for Object Categorization 14.01.2016 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar registration period
Computer Vision Lecture 16 Deep Learning for Object Categorization 14.01.2016 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar registration period
DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material
 DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material Yi Li 1, Gu Wang 1, Xiangyang Ji 1, Yu Xiang 2, and Dieter Fox 2 1 Tsinghua University, BNRist 2 University of Washington
DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material Yi Li 1, Gu Wang 1, Xiangyang Ji 1, Yu Xiang 2, and Dieter Fox 2 1 Tsinghua University, BNRist 2 University of Washington
Convolution Neural Network for Traditional Chinese Calligraphy Recognition
 Convolution Neural Network for Traditional Chinese Calligraphy Recognition Boqi Li Mechanical Engineering Stanford University boqili@stanford.edu Abstract script. Fig. 1 shows examples of the same TCC
Convolution Neural Network for Traditional Chinese Calligraphy Recognition Boqi Li Mechanical Engineering Stanford University boqili@stanford.edu Abstract script. Fig. 1 shows examples of the same TCC
A FRAMEWORK OF EXTRACTING MULTI-SCALE FEATURES USING MULTIPLE CONVOLUTIONAL NEURAL NETWORKS. Kuan-Chuan Peng and Tsuhan Chen
 A FRAMEWORK OF EXTRACTING MULTI-SCALE FEATURES USING MULTIPLE CONVOLUTIONAL NEURAL NETWORKS Kuan-Chuan Peng and Tsuhan Chen School of Electrical and Computer Engineering, Cornell University, Ithaca, NY
A FRAMEWORK OF EXTRACTING MULTI-SCALE FEATURES USING MULTIPLE CONVOLUTIONAL NEURAL NETWORKS Kuan-Chuan Peng and Tsuhan Chen School of Electrical and Computer Engineering, Cornell University, Ithaca, NY
Computer Vision Lecture 16
 Announcements Computer Vision Lecture 16 Deep Learning Applications 11.01.2017 Seminar registration period starts on Friday We will offer a lab course in the summer semester Deep Robot Learning Topic:
Announcements Computer Vision Lecture 16 Deep Learning Applications 11.01.2017 Seminar registration period starts on Friday We will offer a lab course in the summer semester Deep Robot Learning Topic:
Computer Vision Lecture 16
 Computer Vision Lecture 16 Deep Learning Applications 11.01.2017 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar registration period starts
Computer Vision Lecture 16 Deep Learning Applications 11.01.2017 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar registration period starts
ActiveStereoNet: End-to-End Self-Supervised Learning for Active Stereo Systems (Supplementary Materials)
") ActiveStereoNet: End-to-End Self-Supervised Learning for Active Stereo Systems (Supplementary Materials) Yinda Zhang 1,2, Sameh Khamis 1, Christoph Rhemann 1, Julien Valentin 1, Adarsh Kowdle 1, Vladimir
ActiveStereoNet: End-to-End Self-Supervised Learning for Active Stereo Systems (Supplementary Materials) Yinda Zhang 1,2, Sameh Khamis 1, Christoph Rhemann 1, Julien Valentin 1, Adarsh Kowdle 1, Vladimir
INTRODUCTION TO DEEP LEARNING
 INTRODUCTION TO DEEP LEARNING CONTENTS Introduction to deep learning Contents 1. Examples 2. Machine learning 3. Neural networks 4. Deep learning 5. Convolutional neural networks 6. Conclusion 7. Additional
INTRODUCTION TO DEEP LEARNING CONTENTS Introduction to deep learning Contents 1. Examples 2. Machine learning 3. Neural networks 4. Deep learning 5. Convolutional neural networks 6. Conclusion 7. Additional
CNNS FROM THE BASICS TO RECENT ADVANCES. Dmytro Mishkin Center for Machine Perception Czech Technical University in Prague
 CNNS FROM THE BASICS TO RECENT ADVANCES Dmytro Mishkin Center for Machine Perception Czech Technical University in Prague ducha.aiki@gmail.com OUTLINE Short review of the CNN design Architecture progress
CNNS FROM THE BASICS TO RECENT ADVANCES Dmytro Mishkin Center for Machine Perception Czech Technical University in Prague ducha.aiki@gmail.com OUTLINE Short review of the CNN design Architecture progress
Edge Detection Using Convolutional Neural Network
 Edge Detection Using Convolutional Neural Network Ruohui Wang (B) Department of Information Engineering, The Chinese University of Hong Kong, Hong Kong, China wr013@ie.cuhk.edu.hk Abstract. In this work,
Edge Detection Using Convolutional Neural Network Ruohui Wang (B) Department of Information Engineering, The Chinese University of Hong Kong, Hong Kong, China wr013@ie.cuhk.edu.hk Abstract. In this work,
Single Image Depth Estimation via Deep Learning
 Single Image Depth Estimation via Deep Learning Wei Song Stanford University Stanford, CA Abstract The goal of the project is to apply direct supervised deep learning to the problem of monocular depth
Single Image Depth Estimation via Deep Learning Wei Song Stanford University Stanford, CA Abstract The goal of the project is to apply direct supervised deep learning to the problem of monocular depth
Disguised Face Identification (DFI) with Facial KeyPoints using Spatial Fusion Convolutional Network. Nathan Sun CIS601
 with Facial KeyPoints using Spatial Fusion Convolutional Network. Nathan Sun CIS601") Disguised Face Identification (DFI) with Facial KeyPoints using Spatial Fusion Convolutional Network Nathan Sun CIS601 Introduction Face ID is complicated by alterations to an individual s appearance Beard,
Disguised Face Identification (DFI) with Facial KeyPoints using Spatial Fusion Convolutional Network Nathan Sun CIS601 Introduction Face ID is complicated by alterations to an individual s appearance Beard,
Convolutional Neural Networks: Applications and a short timeline. 7th Deep Learning Meetup Kornel Kis Vienna,
 Convolutional Neural Networks: Applications and a short timeline 7th Deep Learning Meetup Kornel Kis Vienna, 1.12.2016. Introduction Currently a master student Master thesis at BME SmartLab Started deep
Convolutional Neural Networks: Applications and a short timeline 7th Deep Learning Meetup Kornel Kis Vienna, 1.12.2016. Introduction Currently a master student Master thesis at BME SmartLab Started deep
Weighted Convolutional Neural Network. Ensemble.
 Weighted Convolutional Neural Network Ensemble Xavier Frazão and Luís A. Alexandre Dept. of Informatics, Univ. Beira Interior and Instituto de Telecomunicações Covilhã, Portugal xavierfrazao@gmail.com
Weighted Convolutional Neural Network Ensemble Xavier Frazão and Luís A. Alexandre Dept. of Informatics, Univ. Beira Interior and Instituto de Telecomunicações Covilhã, Portugal xavierfrazao@gmail.com
Deep Neural Networks:
 Deep Neural Networks: Part II Convolutional Neural Network (CNN) Yuan-Kai Wang, 2016 Web site of this course: http://pattern-recognition.weebly.com source: CNN for ImageClassification, by S. Lazebnik,
Deep Neural Networks: Part II Convolutional Neural Network (CNN) Yuan-Kai Wang, 2016 Web site of this course: http://pattern-recognition.weebly.com source: CNN for ImageClassification, by S. Lazebnik,
Seminars in Artifiial Intelligenie and Robotiis
 Seminars in Artifiial Intelligenie and Robotiis Computer Vision for Intelligent Robotiis Basiis and hints on CNNs Alberto Pretto What is a neural network? We start from the frst type of artifcal neuron,
Seminars in Artifiial Intelligenie and Robotiis Computer Vision for Intelligent Robotiis Basiis and hints on CNNs Alberto Pretto What is a neural network? We start from the frst type of artifcal neuron,
Fuzzy Set Theory in Computer Vision: Example 3, Part II
 Fuzzy Set Theory in Computer Vision: Example 3, Part II Derek T. Anderson and James M. Keller FUZZ-IEEE, July 2017 Overview Resource; CS231n: Convolutional Neural Networks for Visual Recognition https://github.com/tuanavu/stanford-
Fuzzy Set Theory in Computer Vision: Example 3, Part II Derek T. Anderson and James M. Keller FUZZ-IEEE, July 2017 Overview Resource; CS231n: Convolutional Neural Networks for Visual Recognition https://github.com/tuanavu/stanford-
Object Detection. CS698N Final Project Presentation AKSHAT AGARWAL SIDDHARTH TANWAR
 Object Detection CS698N Final Project Presentation AKSHAT AGARWAL SIDDHARTH TANWAR Problem Description Arguably the most important part of perception Long term goals for object recognition: Generalization
Object Detection CS698N Final Project Presentation AKSHAT AGARWAL SIDDHARTH TANWAR Problem Description Arguably the most important part of perception Long term goals for object recognition: Generalization
Inception Network Overview. David White CS793
 Inception Network Overview David White CS793 So, Leonardo DiCaprio dreams about dreaming... https://m.media-amazon.com/images/m/mv5bmjaxmzy3njcxnf5bml5banbnxkftztcwnti5otm0mw@@._v1_sy1000_cr0,0,675,1 000_AL_.jpg
Inception Network Overview David White CS793 So, Leonardo DiCaprio dreams about dreaming... https://m.media-amazon.com/images/m/mv5bmjaxmzy3njcxnf5bml5banbnxkftztcwnti5otm0mw@@._v1_sy1000_cr0,0,675,1 000_AL_.jpg
Dynamic Routing Between Capsules
 Report Explainable Machine Learning Dynamic Routing Between Capsules Author: Michael Dorkenwald Supervisor: Dr. Ullrich Köthe 28. Juni 2018 Inhaltsverzeichnis 1 Introduction 2 2 Motivation 2 3 CapusleNet
Report Explainable Machine Learning Dynamic Routing Between Capsules Author: Michael Dorkenwald Supervisor: Dr. Ullrich Köthe 28. Juni 2018 Inhaltsverzeichnis 1 Introduction 2 2 Motivation 2 3 CapusleNet
The Crucial Components to Solve the Picking Problem
 B. Scholz Common Approaches to the Picking Problem 1 / 31 MIN Faculty Department of Informatics The Crucial Components to Solve the Picking Problem Benjamin Scholz University of Hamburg Faculty of Mathematics,
B. Scholz Common Approaches to the Picking Problem 1 / 31 MIN Faculty Department of Informatics The Crucial Components to Solve the Picking Problem Benjamin Scholz University of Hamburg Faculty of Mathematics,
Volumetric and Multi-View CNNs for Object Classification on 3D Data Supplementary Material
 Volumetric and Multi-View CNNs for Object Classification on 3D Data Supplementary Material Charles R. Qi Hao Su Matthias Nießner Angela Dai Mengyuan Yan Leonidas J. Guibas Stanford University 1. Details
Volumetric and Multi-View CNNs for Object Classification on 3D Data Supplementary Material Charles R. Qi Hao Su Matthias Nießner Angela Dai Mengyuan Yan Leonidas J. Guibas Stanford University 1. Details
Lecture 37: ConvNets (Cont d) and Training
 and Training") Lecture 37: ConvNets (Cont d) and Training CS 4670/5670 Sean Bell [http://bbabenko.tumblr.com/post/83319141207/convolutional-learnings-things-i-learned-by] (Unrelated) Dog vs Food [Karen Zack, @teenybiscuit]
Lecture 37: ConvNets (Cont d) and Training CS 4670/5670 Sean Bell [http://bbabenko.tumblr.com/post/83319141207/convolutional-learnings-things-i-learned-by] (Unrelated) Dog vs Food [Karen Zack, @teenybiscuit]
Real-time convolutional networks for sonar image classification in low-power embedded systems
 Real-time convolutional networks for sonar image classification in low-power embedded systems Matias Valdenegro-Toro Ocean Systems Laboratory - School of Engineering & Physical Sciences Heriot-Watt University,
Real-time convolutional networks for sonar image classification in low-power embedded systems Matias Valdenegro-Toro Ocean Systems Laboratory - School of Engineering & Physical Sciences Heriot-Watt University,
arxiv: v1 [cs.cv] 29 Sep 2016
![arxiv: v1 [cs.cv] 29 Sep 2016](/thumbs/76/73787064.jpg "arxiv: v1 [cs.cv] 29 Sep 2016") arxiv:1609.09545v1 [cs.cv] 29 Sep 2016 Two-stage Convolutional Part Heatmap Regression for the 1st 3D Face Alignment in the Wild (3DFAW) Challenge Adrian Bulat and Georgios Tzimiropoulos Computer Vision
arxiv:1609.09545v1 [cs.cv] 29 Sep 2016 Two-stage Convolutional Part Heatmap Regression for the 1st 3D Face Alignment in the Wild (3DFAW) Challenge Adrian Bulat and Georgios Tzimiropoulos Computer Vision
BranchyNet: Fast Inference via Early Exiting from Deep Neural Networks
 BranchyNet: Fast Inference via Early Exiting from Deep Neural Networks Surat Teerapittayanon Harvard University Email: steerapi@seas.harvard.edu Bradley McDanel Harvard University Email: mcdanel@fas.harvard.edu
BranchyNet: Fast Inference via Early Exiting from Deep Neural Networks Surat Teerapittayanon Harvard University Email: steerapi@seas.harvard.edu Bradley McDanel Harvard University Email: mcdanel@fas.harvard.edu
Learning visual odometry with a convolutional network
 Learning visual odometry with a convolutional network Kishore Konda 1, Roland Memisevic 2 1 Goethe University Frankfurt 2 University of Montreal konda.kishorereddy@gmail.com, roland.memisevic@gmail.com
Learning visual odometry with a convolutional network Kishore Konda 1, Roland Memisevic 2 1 Goethe University Frankfurt 2 University of Montreal konda.kishorereddy@gmail.com, roland.memisevic@gmail.com
Deep Convolutional Neural Networks. Nov. 20th, 2015 Bruce Draper
 Deep Convolutional Neural Networks Nov. 20th, 2015 Bruce Draper Background: Fully-connected single layer neural networks Feed-forward classification Trained through back-propagation Example Computer Vision
Deep Convolutional Neural Networks Nov. 20th, 2015 Bruce Draper Background: Fully-connected single layer neural networks Feed-forward classification Trained through back-propagation Example Computer Vision
Mask R-CNN. presented by Jiageng Zhang, Jingyao Zhan, Yunhan Ma
 Mask R-CNN presented by Jiageng Zhang, Jingyao Zhan, Yunhan Ma Mask R-CNN Background Related Work Architecture Experiment Mask R-CNN Background Related Work Architecture Experiment Background From left
Mask R-CNN presented by Jiageng Zhang, Jingyao Zhan, Yunhan Ma Mask R-CNN Background Related Work Architecture Experiment Mask R-CNN Background Related Work Architecture Experiment Background From left
MOTION ESTIMATION USING CONVOLUTIONAL NEURAL NETWORKS. Mustafa Ozan Tezcan
 MOTION ESTIMATION USING CONVOLUTIONAL NEURAL NETWORKS Mustafa Ozan Tezcan Boston University Department of Electrical and Computer Engineering 8 Saint Mary s Street Boston, MA 2215 www.bu.edu/ece Dec. 19,
MOTION ESTIMATION USING CONVOLUTIONAL NEURAL NETWORKS Mustafa Ozan Tezcan Boston University Department of Electrical and Computer Engineering 8 Saint Mary s Street Boston, MA 2215 www.bu.edu/ece Dec. 19,
Classification of Building Information Model (BIM) Structures with Deep Learning
 Structures with Deep Learning") Classification of Building Information Model (BIM) Structures with Deep Learning Francesco Lomio, Ricardo Farinha, Mauri Laasonen, Heikki Huttunen Tampere University of Technology, Tampere, Finland Sweco
Classification of Building Information Model (BIM) Structures with Deep Learning Francesco Lomio, Ricardo Farinha, Mauri Laasonen, Heikki Huttunen Tampere University of Technology, Tampere, Finland Sweco
Machine Learning. The Breadth of ML Neural Networks & Deep Learning. Marc Toussaint. Duy Nguyen-Tuong. University of Stuttgart
 Machine Learning The Breadth of ML Neural Networks & Deep Learning Marc Toussaint University of Stuttgart Duy Nguyen-Tuong Bosch Center for Artificial Intelligence Summer 2017 Neural Networks Consider
Machine Learning The Breadth of ML Neural Networks & Deep Learning Marc Toussaint University of Stuttgart Duy Nguyen-Tuong Bosch Center for Artificial Intelligence Summer 2017 Neural Networks Consider
Advanced Video Analysis & Imaging
 Advanced Video Analysis & Imaging (5LSH0), Module 09B Machine Learning with Convolutional Neural Networks (CNNs) - Workout Farhad G. Zanjani, Clint Sebastian, Egor Bondarev, Peter H.N. de With ( p.h.n.de.with@tue.nl
Advanced Video Analysis & Imaging (5LSH0), Module 09B Machine Learning with Convolutional Neural Networks (CNNs) - Workout Farhad G. Zanjani, Clint Sebastian, Egor Bondarev, Peter H.N. de With ( p.h.n.de.with@tue.nl
CS 2750: Machine Learning. Neural Networks. Prof. Adriana Kovashka University of Pittsburgh April 13, 2016
 CS 2750: Machine Learning Neural Networks Prof. Adriana Kovashka University of Pittsburgh April 13, 2016 Plan for today Neural network definition and examples Training neural networks (backprop) Convolutional
CS 2750: Machine Learning Neural Networks Prof. Adriana Kovashka University of Pittsburgh April 13, 2016 Plan for today Neural network definition and examples Training neural networks (backprop) Convolutional
Deep Incremental Scene Understanding. Federico Tombari & Christian Rupprecht Technical University of Munich, Germany
 Deep Incremental Scene Understanding Federico Tombari & Christian Rupprecht Technical University of Munich, Germany C. Couprie et al. "Toward Real-time Indoor Semantic Segmentation Using Depth Information"
Deep Incremental Scene Understanding Federico Tombari & Christian Rupprecht Technical University of Munich, Germany C. Couprie et al. "Toward Real-time Indoor Semantic Segmentation Using Depth Information"
arxiv: v1 [cs.cv] 18 Jan 2018
![arxiv: v1 [cs.cv] 18 Jan 2018](/thumbs/74/70143455.jpg "arxiv: v1 [cs.cv] 18 Jan 2018") Sparsely Connected Convolutional Networks arxiv:1.595v1 [cs.cv] 1 Jan 1 Ligeng Zhu* lykenz@sfu.ca Greg Mori Abstract mori@sfu.ca Residual learning [] with skip connections permits training ultra-deep neural
Sparsely Connected Convolutional Networks arxiv:1.595v1 [cs.cv] 1 Jan 1 Ligeng Zhu* lykenz@sfu.ca Greg Mori Abstract mori@sfu.ca Residual learning [] with skip connections permits training ultra-deep neural
Object detection using Region Proposals (RCNN) Ernest Cheung COMP Presentation
 Ernest Cheung COMP Presentation") Object detection using Region Proposals (RCNN) Ernest Cheung COMP790-125 Presentation 1 2 Problem to solve Object detection Input: Image Output: Bounding box of the object 3 Object detection using CNN
Object detection using Region Proposals (RCNN) Ernest Cheung COMP790-125 Presentation 1 2 Problem to solve Object detection Input: Image Output: Bounding box of the object 3 Object detection using CNN
3 Object Detection. BVM 2018 Tutorial: Advanced Deep Learning Methods. Paul F. Jaeger, Division of Medical Image Computing
 3 Object Detection BVM 2018 Tutorial: Advanced Deep Learning Methods Paul F. Jaeger, of Medical Image Computing What is object detection? classification segmentation obj. detection (1 label per pixel)
3 Object Detection BVM 2018 Tutorial: Advanced Deep Learning Methods Paul F. Jaeger, of Medical Image Computing What is object detection? classification segmentation obj. detection (1 label per pixel)
arxiv: v1 [cs.cv] 6 Jul 2016
![arxiv: v1 [cs.cv] 6 Jul 2016](/thumbs/80/81416563.jpg "arxiv: v1 [cs.cv] 6 Jul 2016") arxiv:607.079v [cs.cv] 6 Jul 206 Deep CORAL: Correlation Alignment for Deep Domain Adaptation Baochen Sun and Kate Saenko University of Massachusetts Lowell, Boston University Abstract. Deep neural networks
arxiv:607.079v [cs.cv] 6 Jul 206 Deep CORAL: Correlation Alignment for Deep Domain Adaptation Baochen Sun and Kate Saenko University of Massachusetts Lowell, Boston University Abstract. Deep neural networks
CIS680: Vision & Learning Assignment 2.b: RPN, Faster R-CNN and Mask R-CNN Due: Nov. 21, 2018 at 11:59 pm
 CIS680: Vision & Learning Assignment 2.b: RPN, Faster R-CNN and Mask R-CNN Due: Nov. 21, 2018 at 11:59 pm Instructions This is an individual assignment. Individual means each student must hand in their
CIS680: Vision & Learning Assignment 2.b: RPN, Faster R-CNN and Mask R-CNN Due: Nov. 21, 2018 at 11:59 pm Instructions This is an individual assignment. Individual means each student must hand in their
Neural Network Optimization and Tuning / Spring 2018 / Recitation 3
 Neural Network Optimization and Tuning 11-785 / Spring 2018 / Recitation 3 1 Logistics You will work through a Jupyter notebook that contains sample and starter code with explanations and comments throughout.
Neural Network Optimization and Tuning 11-785 / Spring 2018 / Recitation 3 1 Logistics You will work through a Jupyter notebook that contains sample and starter code with explanations and comments throughout.
Transfer Learning. Style Transfer in Deep Learning
 Transfer Learning & Style Transfer in Deep Learning 4-DEC-2016 Gal Barzilai, Ram Machlev Deep Learning Seminar School of Electrical Engineering Tel Aviv University Part 1: Transfer Learning in Deep Learning
Transfer Learning & Style Transfer in Deep Learning 4-DEC-2016 Gal Barzilai, Ram Machlev Deep Learning Seminar School of Electrical Engineering Tel Aviv University Part 1: Transfer Learning in Deep Learning
Convolution Neural Networks for Chinese Handwriting Recognition
 Convolution Neural Networks for Chinese Handwriting Recognition Xu Chen Stanford University 450 Serra Mall, Stanford, CA 94305 xchen91@stanford.edu Abstract Convolutional neural networks have been proven
Convolution Neural Networks for Chinese Handwriting Recognition Xu Chen Stanford University 450 Serra Mall, Stanford, CA 94305 xchen91@stanford.edu Abstract Convolutional neural networks have been proven
ECCV Presented by: Boris Ivanovic and Yolanda Wang CS 331B - November 16, 2016
 ECCV 2016 Presented by: Boris Ivanovic and Yolanda Wang CS 331B - November 16, 2016 Fundamental Question What is a good vector representation of an object? Something that can be easily predicted from 2D
ECCV 2016 Presented by: Boris Ivanovic and Yolanda Wang CS 331B - November 16, 2016 Fundamental Question What is a good vector representation of an object? Something that can be easily predicted from 2D
A Deep Learning Approach to Vehicle Speed Estimation
 A Deep Learning Approach to Vehicle Speed Estimation Benjamin Penchas bpenchas@stanford.edu Tobin Bell tbell@stanford.edu Marco Monteiro marcorm@stanford.edu ABSTRACT Given car dashboard video footage,
A Deep Learning Approach to Vehicle Speed Estimation Benjamin Penchas bpenchas@stanford.edu Tobin Bell tbell@stanford.edu Marco Monteiro marcorm@stanford.edu ABSTRACT Given car dashboard video footage,
Robust PDF Table Locator
 Robust PDF Table Locator December 17, 2016 1 Introduction Data scientists rely on an abundance of tabular data stored in easy-to-machine-read formats like.csv files. Unfortunately, most government records
Robust PDF Table Locator December 17, 2016 1 Introduction Data scientists rely on an abundance of tabular data stored in easy-to-machine-read formats like.csv files. Unfortunately, most government records
Applying Synthetic Images to Learning Grasping Orientation from Single Monocular Images
 Applying Synthetic Images to Learning Grasping Orientation from Single Monocular Images 1 Introduction - Steve Chuang and Eric Shan - Determining object orientation in images is a well-established topic
Applying Synthetic Images to Learning Grasping Orientation from Single Monocular Images 1 Introduction - Steve Chuang and Eric Shan - Determining object orientation in images is a well-established topic