Prof. Feng Liu. Spring /24/2017
|
|
|
- Audra Stevens
- 5 years ago
- Views:
Transcription
1 Prof. Feng Lu Sprng 2017 ttp:// 05/24/2017
2 Last me Compostng and Mattng 2
3 oday Vdeo Stablzaton Vdeo stablzaton ppelne 3

4 Orson Welles, ouc of Evl,


5 Images courtesy Peter Sand and Flckr user Carles W. Brown 5

6 6
7 7

8 [Lu et al. 09] 8

9 Input Stablzaton result 9
10
11 Input rajectory Estmaton Moton Model Estmaton Moton Plan Vdeo ransform Output
12 Input rajectory Estmaton Moton Model Estmaton Moton Plan Vdeo ransform Output Feature trajectores
13 Input rajectory Estmaton Moton Model Estmaton Moton Plan Vdeo ransform Output Feature trajectores
14
15 Brgtness Constancy Equaton: Lnearzng te rgt sde usng aylor epanson: ), ( 1),, ( ),, ( ), ( t y y v y u I t y I ), ( ), ( ),, ( 1),, ( y v I y u I t y I t y I y Feature rackng I(,y,t 1) I(,y,t) 0 t y I v I u I Hence, B. Lucas and. Kanade. An teratve mage regstraton tecnque wt an applcaton to stereo vson. In Proceedngs of te Internatonal Jont Conference on Artfcal Intellgence, pp , 1981.
16 Spatal Coerence Constrant I u I y v It 0 How many equatons and unknowns per pel? One equaton, two unknowns How to get more equatons for a pel? Spatal coerence constrant: pretend te pel s negbors ave te same (u,v) 16
17 Solvng te rackng Problem Least squares problem: Wen s ts system solvable? Wat f te wndow contans just a sngle stragt edge? B. Lucas and. Kanade. An teratve mage regstraton tecnque wt an applcaton to stereo vson. In Proceedngs of te Internatonal Jont Conference on Artfcal Intellgence, pp , 1981.

18 Condtons for Solvablty Bad case: sngle stragt edge
19 Lucas-Kanade Flow Least squares problem: Soluton gven by e summatons are over all pels n te wndow B. Lucas and. Kanade. An teratve mage regstraton tecnque wt an applcaton to stereo vson. In Proceedngs of te Internatonal Jont Conference on Artfcal Intellgence, pp , 1981.
20 Lucas-Kanade Flow Recall te Harrs corner detector: M = A A s te second moment matr We can fgure out weter te system s solvable by lookng at te egenvalues of te second moment matr e egenvectors and egenvalues of M relate to edge drecton and magntude e egenvector assocated wt te larger egenvalue ponts n te drecton of fastest ntensty cange, and te oter egenvector s ortogonal to t
21 Interpretng te egenvalues Classfcaton of mage ponts usng egenvalues of te second moment matr: 2 Edge 2 >> 1 Corner 1 and 2 are large, 1 ~ 2 1 and 2 are small Flat regon Edge 1 >> 2 1
22 Unform Regon gradents ave small magntude small 1, small 2 system s ll-condtoned
23 Edge gradents ave one domnant drecton large 1, small 2 system s ll-condtoned

24 Hg-teture or Corner Regon gradents ave dfferent drectons, large magntudes large 1, large 2 system s well-condtoned
25 Feature trackng So far, we ave only consdered feature trackng n a par of mages If we ave more tan two mages, we can track feature from eac frame to te net Gven a pont n te frst mage, we can n prncple reconstruct ts pat by smply followng te arrows
26 rackng over Many Frames Select features n frst frame For eac frame: Update postons of tracked features Dscrete searc or Lucas-Kanade (or a combnaton of te two) ermnate nconsstent tracks Compute smlarty wt correspondng feature n te prevous frame or n te frst frame were t s vsble Fnd more features to track
27 S-omas Feature racker Fnd good features usng egenvalues of secondmoment matr Key dea: good features to track are te ones wose moton can be estmated relably From frame to frame, track wt Lucas-Kanade s amounts to assumng a translaton model for frame-to-frame feature movement Ceck consstency of tracks by affne regstraton to te frst observed nstance of te feature Affne model s more accurate for larger dsplacements Comparng to te frst frame elps to mnmze drft J. S and C. omas. Good Features to rack. CVPR 1994.

28 Input rajectory Estmaton Moton Model Estmaton Moton Plan Vdeo ransform Output Frames 2 2D moton model (omograpy)
29 Homograpy y y epand
30 Fttng a omograpy Equaton for omograpy: y y 0 y y y y y 3 equatons, only 2 lnearly ndependent
31 Drect lnear transform H as 8 degrees of freedom (9 parameters, but scale s arbtrary) One matc gves us two lnearly ndependent equatons Four matces needed for a mnmal soluton (null space of 89 matr) More tan four: omogeneous least squares n n n n n n y y 0 A
32 Input rajectory Estmaton Moton Model Estmaton Moton Plan Vdeo ransform Output

33 Moton Plan S t N t t G, were t t j j Image courtesy: Matsusta et al

34 34
35 35
36 36

37 Input rajectory Estmaton Moton Model Estmaton Moton Plan Vdeo ransform Output 3D reconstructon va structure from moton Voodoo Camera racker (ttp://

38 Voodoo Camera racker (ttp://

39 Input rajectory Estmaton Moton Model Estmaton Moton Plan Vdeo ransform Output
40 Input rajectory Estmaton Moton Model Estmaton Moton Plan Vdeo ransform Output Novel vew syntess va mage based renderng

41 Unstructured lumgrap renderng [Bueler et al. 01] 41
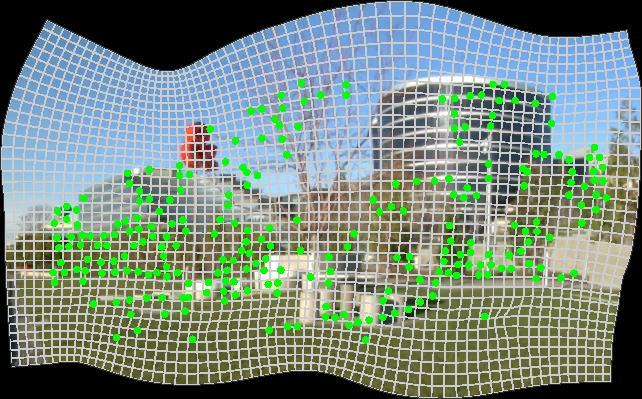
42 42 F Lu, M Glecer, H Jn, A Agarwala. Content-preservng warps for 3D vdeo stablzaton, SIGGRAPH 09
43 Input rajectory Estmaton Moton Model Estmaton Moton Plan Vdeo ransform Output Novel vew syntess mage based renderng
44 Input rajectory Estmaton Moton Model Estmaton Moton Plan Vdeo ransform Output Our metod for novel vew syntess One nput frame One output frame
45 45
46 46

47 nput frame and ponts 47
48 nput frame and ponts output ponts 48

49 nput frame and ponts output frame 49

50 50



51 51

52 52


53 53
54 54

55 [Igaras et al. 05] 55



56 Input Vsual salency map [Itt et al. 99] Vsual salency: te dstnct subjectve perceptual qualty wc makes some tems n te world stand out from ter negbors and mmedately grab our attenton from [Itt 07] 56

57 Input Output 57

58 Input Output teture mappng [Srley et al. 2005] 58

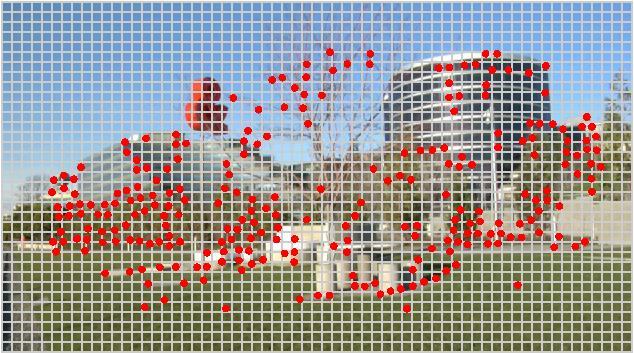
59 Grd mes & ponts Output 59
60 Net me More on Vdeo Stablzaton 3D Vdeo Stablzaton Subspace Vdeo Stablzaton 60
Geometric Transformations and Multiple Views
 CS 2770: Computer Vson Geometrc Transformatons and Multple Vews Prof. Adrana Kovaska Unverst of Pttsburg Februar 8, 208 W multple vews? Structure and dept are nerentl ambguous from sngle vews. Multple
CS 2770: Computer Vson Geometrc Transformatons and Multple Vews Prof. Adrana Kovaska Unverst of Pttsburg Februar 8, 208 W multple vews? Structure and dept are nerentl ambguous from sngle vews. Multple
Image Alignment CSC 767
 Image Algnment CSC 767 Image algnment Image from http://graphcs.cs.cmu.edu/courses/15-463/2010_fall/ Image algnment: Applcatons Panorama sttchng Image algnment: Applcatons Recognton of object nstances
Image Algnment CSC 767 Image algnment Image from http://graphcs.cs.cmu.edu/courses/15-463/2010_fall/ Image algnment: Applcatons Panorama sttchng Image algnment: Applcatons Recognton of object nstances
Structure from Motion
 Structure from Moton Structure from Moton For now, statc scene and movng camera Equvalentl, rgdl movng scene and statc camera Lmtng case of stereo wth man cameras Lmtng case of multvew camera calbraton
Structure from Moton Structure from Moton For now, statc scene and movng camera Equvalentl, rgdl movng scene and statc camera Lmtng case of stereo wth man cameras Lmtng case of multvew camera calbraton
What are the camera parameters? Where are the light sources? What is the mapping from radiance to pixel color? Want to solve for 3D geometry
 Today: Calbraton What are the camera parameters? Where are the lght sources? What s the mappng from radance to pel color? Why Calbrate? Want to solve for D geometry Alternatve approach Solve for D shape
Today: Calbraton What are the camera parameters? Where are the lght sources? What s the mappng from radance to pel color? Why Calbrate? Want to solve for D geometry Alternatve approach Solve for D shape
Calibrating a single camera. Odilon Redon, Cyclops, 1914
 Calbratng a sngle camera Odlon Redon, Cclops, 94 Our goal: Recover o 3D structure Recover o structure rom one mage s nherentl ambguous??? Sngle-vew ambgut Sngle-vew ambgut Rashad Alakbarov shadow sculptures
Calbratng a sngle camera Odlon Redon, Cclops, 94 Our goal: Recover o 3D structure Recover o structure rom one mage s nherentl ambguous??? Sngle-vew ambgut Sngle-vew ambgut Rashad Alakbarov shadow sculptures
Fitting and Alignment
 Fttng and Algnment Computer Vson Ja-Bn Huang, Vrgna Tech Many sldes from S. Lazebnk and D. Hoem Admnstratve Stuffs HW 1 Competton: Edge Detecton Submsson lnk HW 2 wll be posted tonght Due Oct 09 (Mon)
Fttng and Algnment Computer Vson Ja-Bn Huang, Vrgna Tech Many sldes from S. Lazebnk and D. Hoem Admnstratve Stuffs HW 1 Competton: Edge Detecton Submsson lnk HW 2 wll be posted tonght Due Oct 09 (Mon)
Exact solution, the Direct Linear Transfo. ct solution, the Direct Linear Transform
 Estmaton Basc questons We are gong to be nterested of solvng e.g. te followng estmaton problems: D omograpy. Gven a pont set n P and crespondng ponts n P, fnd te omograpy suc tat ( ) =. Camera projecton.
Estmaton Basc questons We are gong to be nterested of solvng e.g. te followng estmaton problems: D omograpy. Gven a pont set n P and crespondng ponts n P, fnd te omograpy suc tat ( ) =. Camera projecton.
Machine Learning. K-means Algorithm
 Macne Learnng CS 6375 --- Sprng 2015 Gaussan Mture Model GMM pectaton Mamzaton M Acknowledgement: some sldes adopted from Crstoper Bsop Vncent Ng. 1 K-means Algortm Specal case of M Goal: represent a data
Macne Learnng CS 6375 --- Sprng 2015 Gaussan Mture Model GMM pectaton Mamzaton M Acknowledgement: some sldes adopted from Crstoper Bsop Vncent Ng. 1 K-means Algortm Specal case of M Goal: represent a data
Machine Learning 9. week
 Machne Learnng 9. week Mappng Concept Radal Bass Functons (RBF) RBF Networks 1 Mappng It s probably the best scenaro for the classfcaton of two dataset s to separate them lnearly. As you see n the below
Machne Learnng 9. week Mappng Concept Radal Bass Functons (RBF) RBF Networks 1 Mappng It s probably the best scenaro for the classfcaton of two dataset s to separate them lnearly. As you see n the below
Angle-Independent 3D Reconstruction. Ji Zhang Mireille Boutin Daniel Aliaga
 Angle-Independent 3D Reconstructon J Zhang Mrelle Boutn Danel Alaga Goal: Structure from Moton To reconstruct the 3D geometry of a scene from a set of pctures (e.g. a move of the scene pont reconstructon
Angle-Independent 3D Reconstructon J Zhang Mrelle Boutn Danel Alaga Goal: Structure from Moton To reconstruct the 3D geometry of a scene from a set of pctures (e.g. a move of the scene pont reconstructon
Fitting & Matching. Lecture 4 Prof. Bregler. Slides from: S. Lazebnik, S. Seitz, M. Pollefeys, A. Effros.
 Fttng & Matchng Lecture 4 Prof. Bregler Sldes from: S. Lazebnk, S. Setz, M. Pollefeys, A. Effros. How do we buld panorama? We need to match (algn) mages Matchng wth Features Detect feature ponts n both
Fttng & Matchng Lecture 4 Prof. Bregler Sldes from: S. Lazebnk, S. Setz, M. Pollefeys, A. Effros. How do we buld panorama? We need to match (algn) mages Matchng wth Features Detect feature ponts n both
Computer Vision Lecture 12
 N pels Course Outlne Computer Vson Lecture 2 Recognton wt Local Features 5226 Bastan Lebe RWH acen ttp://wwwvsonrwt-aacende/ lebe@vsonrwt-aacende Image Processng Bascs Segmentaton & Groupng Object Recognton
N pels Course Outlne Computer Vson Lecture 2 Recognton wt Local Features 5226 Bastan Lebe RWH acen ttp://wwwvsonrwt-aacende/ lebe@vsonrwt-aacende Image Processng Bascs Segmentaton & Groupng Object Recognton
Image warping and stitching May 5 th, 2015
 Image warpng and sttchng Ma 5 th, 2015 Yong Jae Lee UC Davs PS2 due net Frda Announcements 2 Last tme Interactve segmentaton Feature-based algnment 2D transformatons Affne ft RANSAC 3 1 Algnment problem
Image warpng and sttchng Ma 5 th, 2015 Yong Jae Lee UC Davs PS2 due net Frda Announcements 2 Last tme Interactve segmentaton Feature-based algnment 2D transformatons Affne ft RANSAC 3 1 Algnment problem
Computer Animation and Visualisation. Lecture 4. Rigging / Skinning
 Computer Anmaton and Vsualsaton Lecture 4. Rggng / Sknnng Taku Komura Overvew Sknnng / Rggng Background knowledge Lnear Blendng How to decde weghts? Example-based Method Anatomcal models Sknnng Assume
Computer Anmaton and Vsualsaton Lecture 4. Rggng / Sknnng Taku Komura Overvew Sknnng / Rggng Background knowledge Lnear Blendng How to decde weghts? Example-based Method Anatomcal models Sknnng Assume
we use mult-frame lnear subspace constrants to constran te D correspondence estmaton process tself, wtout recoverng any D nformaton. Furtermore, wesow
 Mult-Frame Optcal Flow Estmaton Usng Subspace Constrants Mcal Iran Dept. of Computer Scence and Appled Mat Te Wezmann Insttute of Scence 100 Reovot, Israel Abstract We sow tat te set of all ow-elds n a
Mult-Frame Optcal Flow Estmaton Usng Subspace Constrants Mcal Iran Dept. of Computer Scence and Appled Mat Te Wezmann Insttute of Scence 100 Reovot, Israel Abstract We sow tat te set of all ow-elds n a
SLAM Summer School 2006 Practical 2: SLAM using Monocular Vision
 SLAM Summer School 2006 Practcal 2: SLAM usng Monocular Vson Javer Cvera, Unversty of Zaragoza Andrew J. Davson, Imperal College London J.M.M Montel, Unversty of Zaragoza. josemar@unzar.es, jcvera@unzar.es,
SLAM Summer School 2006 Practcal 2: SLAM usng Monocular Vson Javer Cvera, Unversty of Zaragoza Andrew J. Davson, Imperal College London J.M.M Montel, Unversty of Zaragoza. josemar@unzar.es, jcvera@unzar.es,
Real-time Joint Tracking of a Hand Manipulating an Object from RGB-D Input
 Real-tme Jont Tracng of a Hand Manpulatng an Object from RGB-D Input Srnath Srdhar 1 Franzsa Mueller 1 Mchael Zollhöfer 1 Dan Casas 1 Antt Oulasvrta 2 Chrstan Theobalt 1 1 Max Planc Insttute for Informatcs
Real-tme Jont Tracng of a Hand Manpulatng an Object from RGB-D Input Srnath Srdhar 1 Franzsa Mueller 1 Mchael Zollhöfer 1 Dan Casas 1 Antt Oulasvrta 2 Chrstan Theobalt 1 1 Max Planc Insttute for Informatcs
Joint Tracking of Features and Edges
 Jont Trackng of Features and Edges Stanley T. Brchfeld Shrnvas J. Pundlk Electrcal and Computer Engneerng Department Clemson Unversty, Clemson, SC 29634 {stb, spundl}@clemson.edu Abstract Sparse features
Jont Trackng of Features and Edges Stanley T. Brchfeld Shrnvas J. Pundlk Electrcal and Computer Engneerng Department Clemson Unversty, Clemson, SC 29634 {stb, spundl}@clemson.edu Abstract Sparse features
MOTION BLUR ESTIMATION AT CORNERS
 Gacomo Boracch and Vncenzo Caglot Dpartmento d Elettronca e Informazone, Poltecnco d Mlano, Va Ponzo, 34/5-20133 MILANO boracch@elet.polm.t, caglot@elet.polm.t Keywords: Abstract: Pont Spread Functon Parameter
Gacomo Boracch and Vncenzo Caglot Dpartmento d Elettronca e Informazone, Poltecnco d Mlano, Va Ponzo, 34/5-20133 MILANO boracch@elet.polm.t, caglot@elet.polm.t Keywords: Abstract: Pont Spread Functon Parameter
IMAGE MATCHING WITH SIFT FEATURES A PROBABILISTIC APPROACH
 IMAGE MATCHING WITH SIFT FEATURES A PROBABILISTIC APPROACH Jyot Joglekar a, *, Shrsh S. Gedam b a CSRE, IIT Bombay, Doctoral Student, Mumba, Inda jyotj@tb.ac.n b Centre of Studes n Resources Engneerng,
IMAGE MATCHING WITH SIFT FEATURES A PROBABILISTIC APPROACH Jyot Joglekar a, *, Shrsh S. Gedam b a CSRE, IIT Bombay, Doctoral Student, Mumba, Inda jyotj@tb.ac.n b Centre of Studes n Resources Engneerng,
KFUPM. SE301: Numerical Methods Topic 8 Ordinary Differential Equations (ODEs) Lecture (Term 101) Section 04. Read
 Lecture (Term 101) Section 04. Read") SE3: Numercal Metods Topc 8 Ordnar Dfferental Equatons ODEs Lecture 8-36 KFUPM Term Secton 4 Read 5.-5.4 6-7- C ISE3_Topc8L Outlne of Topc 8 Lesson : Introducton to ODEs Lesson : Talor seres metods Lesson
SE3: Numercal Metods Topc 8 Ordnar Dfferental Equatons ODEs Lecture 8-36 KFUPM Term Secton 4 Read 5.-5.4 6-7- C ISE3_Topc8L Outlne of Topc 8 Lesson : Introducton to ODEs Lesson : Talor seres metods Lesson
Line-based Camera Movement Estimation by Using Parallel Lines in Omnidirectional Video
 01 IEEE Internatonal Conference on Robotcs and Automaton RverCentre, Sant Paul, Mnnesota, USA May 14-18, 01 Lne-based Camera Movement Estmaton by Usng Parallel Lnes n Omndrectonal Vdeo Ryosuke kawansh,
01 IEEE Internatonal Conference on Robotcs and Automaton RverCentre, Sant Paul, Mnnesota, USA May 14-18, 01 Lne-based Camera Movement Estmaton by Usng Parallel Lnes n Omndrectonal Vdeo Ryosuke kawansh,
Support Vector Machines
 /9/207 MIST.6060 Busness Intellgence and Data Mnng What are Support Vector Machnes? Support Vector Machnes Support Vector Machnes (SVMs) are supervsed learnng technques that analyze data and recognze patterns.
/9/207 MIST.6060 Busness Intellgence and Data Mnng What are Support Vector Machnes? Support Vector Machnes Support Vector Machnes (SVMs) are supervsed learnng technques that analyze data and recognze patterns.
AIMS Computer vision. AIMS Computer Vision. Outline. Outline.
 AIMS Computer Vson 1 Matchng, ndexng, and search 2 Object category detecton 3 Vsual geometry 1/2: Camera models and trangulaton 4 Vsual geometry 2/2: Reconstructon from multple vews AIMS Computer vson
AIMS Computer Vson 1 Matchng, ndexng, and search 2 Object category detecton 3 Vsual geometry 1/2: Camera models and trangulaton 4 Vsual geometry 2/2: Reconstructon from multple vews AIMS Computer vson
Lecture 5: Multilayer Perceptrons
 Lecture 5: Multlayer Perceptrons Roger Grosse 1 Introducton So far, we ve only talked about lnear models: lnear regresson and lnear bnary classfers. We noted that there are functons that can t be represented
Lecture 5: Multlayer Perceptrons Roger Grosse 1 Introducton So far, we ve only talked about lnear models: lnear regresson and lnear bnary classfers. We noted that there are functons that can t be represented
Outline. Discriminative classifiers for image recognition. Where in the World? A nearest neighbor recognition example 4/14/2011. CS 376 Lecture 22 1
 4/14/011 Outlne Dscrmnatve classfers for mage recognton Wednesday, Aprl 13 Krsten Grauman UT-Austn Last tme: wndow-based generc obect detecton basc ppelne face detecton wth boostng as case study Today:
4/14/011 Outlne Dscrmnatve classfers for mage recognton Wednesday, Aprl 13 Krsten Grauman UT-Austn Last tme: wndow-based generc obect detecton basc ppelne face detecton wth boostng as case study Today:
Correspondence-free Synchronization and Reconstruction in a Non-rigid Scene
 Correspondence-free Synchronzaton and Reconstructon n a Non-rgd Scene Lor Wolf and Assaf Zomet School of Computer Scence and Engneerng, The Hebrew Unversty, Jerusalem 91904, Israel e-mal: {lwolf,zomet}@cs.huj.ac.l
Correspondence-free Synchronzaton and Reconstructon n a Non-rgd Scene Lor Wolf and Assaf Zomet School of Computer Scence and Engneerng, The Hebrew Unversty, Jerusalem 91904, Israel e-mal: {lwolf,zomet}@cs.huj.ac.l
The ray density estimation of a CT system by a supervised learning algorithm
 Te ray densty estaton of a CT syste by a suervsed learnng algort Nae : Jongduk Baek Student ID : 5459 Toc y toc s to fnd te ray densty of a new CT syste by usng te learnng algort Background Snce te develoent
Te ray densty estaton of a CT syste by a suervsed learnng algort Nae : Jongduk Baek Student ID : 5459 Toc y toc s to fnd te ray densty of a new CT syste by usng te learnng algort Background Snce te develoent
Computer Vision Lecture 14
 N pels Scrpt Computer Vson Lecture 4 Recognton wt Local Features We ve created a scrpt for te part of te lecture on object recognton & categorzaton K. Grauman, Vsual Object Recognton Morgan & Clapool publsers,
N pels Scrpt Computer Vson Lecture 4 Recognton wt Local Features We ve created a scrpt for te part of te lecture on object recognton & categorzaton K. Grauman, Vsual Object Recognton Morgan & Clapool publsers,
Takahiro ISHIKAWA Takahiro Ishikawa Takahiro Ishikawa Takeo KANADE
 Takahro ISHIKAWA Takahro Ishkawa Takahro Ishkawa Takeo KANADE Monocular gaze estmaton s usually performed by locatng the pupls, and the nner and outer eye corners n the mage of the drver s head. Of these
Takahro ISHIKAWA Takahro Ishkawa Takahro Ishkawa Takeo KANADE Monocular gaze estmaton s usually performed by locatng the pupls, and the nner and outer eye corners n the mage of the drver s head. Of these
Radial Basis Functions
 Radal Bass Functons Mesh Reconstructon Input: pont cloud Output: water-tght manfold mesh Explct Connectvty estmaton Implct Sgned dstance functon estmaton Image from: Reconstructon and Representaton of
Radal Bass Functons Mesh Reconstructon Input: pont cloud Output: water-tght manfold mesh Explct Connectvty estmaton Implct Sgned dstance functon estmaton Image from: Reconstructon and Representaton of
Improvement of Spatial Resolution Using BlockMatching Based Motion Estimation and Frame. Integration
 Improvement of Spatal Resoluton Usng BlockMatchng Based Moton Estmaton and Frame Integraton Danya Suga and Takayuk Hamamoto Graduate School of Engneerng, Tokyo Unversty of Scence, 6-3-1, Nuku, Katsuska-ku,
Improvement of Spatal Resoluton Usng BlockMatchng Based Moton Estmaton and Frame Integraton Danya Suga and Takayuk Hamamoto Graduate School of Engneerng, Tokyo Unversty of Scence, 6-3-1, Nuku, Katsuska-ku,
The AVL Balance Condition. CSE 326: Data Structures. AVL Trees. The AVL Tree Data Structure. Is this an AVL Tree? Height of an AVL Tree
 CSE : Data Structures AL Trees Neva Cernavsy Summer Te AL Balance Condton AL balance property: Left and rgt subtrees of every node ave egts dfferng by at most Ensures small dept ll prove ts by sowng tat
CSE : Data Structures AL Trees Neva Cernavsy Summer Te AL Balance Condton AL balance property: Left and rgt subtrees of every node ave egts dfferng by at most Ensures small dept ll prove ts by sowng tat
Multi-stable Perception. Necker Cube
 Mult-stable Percepton Necker Cube Spnnng dancer lluson, Nobuuk Kaahara Fttng and Algnment Computer Vson Szelsk 6.1 James Has Acknowledgment: Man sldes from Derek Hoem, Lana Lazebnk, and Grauman&Lebe 2008
Mult-stable Percepton Necker Cube Spnnng dancer lluson, Nobuuk Kaahara Fttng and Algnment Computer Vson Szelsk 6.1 James Has Acknowledgment: Man sldes from Derek Hoem, Lana Lazebnk, and Grauman&Lebe 2008
Feature Reduction and Selection
 Feature Reducton and Selecton Dr. Shuang LIANG School of Software Engneerng TongJ Unversty Fall, 2012 Today s Topcs Introducton Problems of Dmensonalty Feature Reducton Statstc methods Prncpal Components
Feature Reducton and Selecton Dr. Shuang LIANG School of Software Engneerng TongJ Unversty Fall, 2012 Today s Topcs Introducton Problems of Dmensonalty Feature Reducton Statstc methods Prncpal Components
SIMULTANEOUS REGISTRATION OF MULTIPLE VIEWS OF A 3D OBJECT
 SIMULTANEOUS REGISTRATION OF MULTIPLE VIEWS OF A 3D OBJECT Helmut Pottmann a, Stefan Leopoldseder a, Mchael Hofer a a Insttute of Geometry, Venna Unversty of Technology, Wedner Hauptstr. 8 10, A 1040 Wen,
SIMULTANEOUS REGISTRATION OF MULTIPLE VIEWS OF A 3D OBJECT Helmut Pottmann a, Stefan Leopoldseder a, Mchael Hofer a a Insttute of Geometry, Venna Unversty of Technology, Wedner Hauptstr. 8 10, A 1040 Wen,
LEAST SQUARES. RANSAC. HOUGH TRANSFORM.
 LEAS SQUARES. RANSAC. HOUGH RANSFORM. he sldes are from several sources through James Has (Brown); Srnvasa Narasmhan (CMU); Slvo Savarese (U. of Mchgan); Bll Freeman and Antono orralba (MI), ncludng ther
LEAS SQUARES. RANSAC. HOUGH RANSFORM. he sldes are from several sources through James Has (Brown); Srnvasa Narasmhan (CMU); Slvo Savarese (U. of Mchgan); Bll Freeman and Antono orralba (MI), ncludng ther
Computer Vision I. Xbox Kinnect: Rectification. The Fundamental matrix. Stereo III. CSE252A Lecture 16. Example: forward motion
 Xbox Knnect: Stereo III Depth map http://www.youtube.com/watch?v=7qrnwoo-8a CSE5A Lecture 6 Projected pattern http://www.youtube.com/watch?v=ceep7x-z4wy The Fundamental matrx Rectfcaton The eppolar constrant
Xbox Knnect: Stereo III Depth map http://www.youtube.com/watch?v=7qrnwoo-8a CSE5A Lecture 6 Projected pattern http://www.youtube.com/watch?v=ceep7x-z4wy The Fundamental matrx Rectfcaton The eppolar constrant
IMAGE STITCHING WITH PERSPECTIVE-PRESERVING WARPING
 ISPRS Annals of the Photogrammetry, Remote Sensng and Spatal Informaton Scences, Volume III-3, 2016 IMAGE STITCHING WITH PERSPECTIVE-PRESERVING WARPING Tanzhu Xang, Gu-Song Xa, Langpe Zhang State Key Laboratory
ISPRS Annals of the Photogrammetry, Remote Sensng and Spatal Informaton Scences, Volume III-3, 2016 IMAGE STITCHING WITH PERSPECTIVE-PRESERVING WARPING Tanzhu Xang, Gu-Song Xa, Langpe Zhang State Key Laboratory
Alignment and Object Instance Recognition
 Algnment and Object Instance Recognton Computer Vson Ja-Bn Huang, Vrgna Tech Man sldes from S. Lazebnk and D. Hoem Admnstratve Stuffs HW 2 due 11:59 PM Oct 9 Anonmous feedback Lectures Mcrophone on our
Algnment and Object Instance Recognton Computer Vson Ja-Bn Huang, Vrgna Tech Man sldes from S. Lazebnk and D. Hoem Admnstratve Stuffs HW 2 due 11:59 PM Oct 9 Anonmous feedback Lectures Mcrophone on our
Reading. 14. Subdivision curves. Recommended:
 eadng ecommended: Stollntz, Deose, and Salesn. Wavelets for Computer Graphcs: heory and Applcatons, 996, secton 6.-6., A.5. 4. Subdvson curves Note: there s an error n Stollntz, et al., secton A.5. Equaton
eadng ecommended: Stollntz, Deose, and Salesn. Wavelets for Computer Graphcs: heory and Applcatons, 996, secton 6.-6., A.5. 4. Subdvson curves Note: there s an error n Stollntz, et al., secton A.5. Equaton
Target Tracking Analysis Based on Corner Registration Zhengxi Kang 1, a, Hui Zhao 1, b, Yuanzhen Dang 1, c
 Advanced Materals Research Onlne: 03-09-8 ISSN: 66-8985, Vols. 760-76, pp 997-00 do:0.408/www.scentfc.net/amr.760-76.997 03 Trans Tech Publcatons, Swtzerland Target Trackng Analyss Based on Corner Regstraton
Advanced Materals Research Onlne: 03-09-8 ISSN: 66-8985, Vols. 760-76, pp 997-00 do:0.408/www.scentfc.net/amr.760-76.997 03 Trans Tech Publcatons, Swtzerland Target Trackng Analyss Based on Corner Regstraton
A SALIENCY BASED OBJECT TRACKING METHOD
 A SALIENCY BASED OBJECT TRACKING METHOD Shje Zhang and Fred Stentford Unversty College London, Adastral Park Campus, Ross Buldng Martlesham Heath, Ipswch, IP5 3RE, UK {j.zhang, f.stentford}@adastral.ucl.ac.uk
A SALIENCY BASED OBJECT TRACKING METHOD Shje Zhang and Fred Stentford Unversty College London, Adastral Park Campus, Ross Buldng Martlesham Heath, Ipswch, IP5 3RE, UK {j.zhang, f.stentford}@adastral.ucl.ac.uk
Robust Recovery of Camera Rotation from Three Frames. B. Rousso S. Avidan A. Shashua y S. Peleg z. The Hebrew University of Jerusalem
 Robust Recovery of Camera Rotaton from Three Frames B. Rousso S. Avdan A. Shashua y S. Peleg z Insttute of Computer Scence The Hebrew Unversty of Jerusalem 994 Jerusalem, Israel e-mal : roussocs.huj.ac.l
Robust Recovery of Camera Rotaton from Three Frames B. Rousso S. Avdan A. Shashua y S. Peleg z Insttute of Computer Scence The Hebrew Unversty of Jerusalem 994 Jerusalem, Israel e-mal : roussocs.huj.ac.l
Optimal Combination of Stereo Camera Calibration from Arbitrary Stereo Images.
 Tna Memo No. 1991-002 Image and Vson Computng, 9(1), 27-32, 1990. Optmal Combnaton of Stereo Camera Calbraton from Arbtrary Stereo Images. N.A.Thacker and J.E.W.Mayhew. Last updated 6 / 9 / 2005 Imagng
Tna Memo No. 1991-002 Image and Vson Computng, 9(1), 27-32, 1990. Optmal Combnaton of Stereo Camera Calbraton from Arbtrary Stereo Images. N.A.Thacker and J.E.W.Mayhew. Last updated 6 / 9 / 2005 Imagng
A ROBUST FEATURE TRACKER FOR ACTIVE SURVEILLANCE OF OUTDOOR SCENES
 Electronc Letters on Computer Vson and mage Analyss 1(1):21-34, 2003 A ROBUST FEATURE TRACKER FOR ACTVE SURVELLANCE OF OUTDOOR SCENES G. L. Forest and C. Mchelon Departement of Mathematcs and Computer
Electronc Letters on Computer Vson and mage Analyss 1(1):21-34, 2003 A ROBUST FEATURE TRACKER FOR ACTVE SURVELLANCE OF OUTDOOR SCENES G. L. Forest and C. Mchelon Departement of Mathematcs and Computer
A Fast Visual Tracking Algorithm Based on Circle Pixels Matching
 A Fast Vsual Trackng Algorthm Based on Crcle Pxels Matchng Zhqang Hou hou_zhq@sohu.com Chongzhao Han czhan@mal.xjtu.edu.cn Ln Zheng Abstract: A fast vsual trackng algorthm based on crcle pxels matchng
A Fast Vsual Trackng Algorthm Based on Crcle Pxels Matchng Zhqang Hou hou_zhq@sohu.com Chongzhao Han czhan@mal.xjtu.edu.cn Ln Zheng Abstract: A fast vsual trackng algorthm based on crcle pxels matchng
Range images. Range image registration. Examples of sampling patterns. Range images and range surfaces
 Range mages For many structured lght scanners, the range data forms a hghly regular pattern known as a range mage. he samplng pattern s determned by the specfc scanner. Range mage regstraton 1 Examples
Range mages For many structured lght scanners, the range data forms a hghly regular pattern known as a range mage. he samplng pattern s determned by the specfc scanner. Range mage regstraton 1 Examples
Ecient Computation of the Most Probable Motion from Fuzzy. Moshe Ben-Ezra Shmuel Peleg Michael Werman. The Hebrew University of Jerusalem
 Ecent Computaton of the Most Probable Moton from Fuzzy Correspondences Moshe Ben-Ezra Shmuel Peleg Mchael Werman Insttute of Computer Scence The Hebrew Unversty of Jerusalem 91904 Jerusalem, Israel Emal:
Ecent Computaton of the Most Probable Moton from Fuzzy Correspondences Moshe Ben-Ezra Shmuel Peleg Mchael Werman Insttute of Computer Scence The Hebrew Unversty of Jerusalem 91904 Jerusalem, Israel Emal:
Video Object Tracking Based On Extended Active Shape Models With Color Information
 CGIV'2002: he Frst Frst European Conference Colour on Colour n Graphcs, Imagng, and Vson Vdeo Object rackng Based On Extended Actve Shape Models Wth Color Informaton A. Koschan, S.K. Kang, J.K. Pak, B.
CGIV'2002: he Frst Frst European Conference Colour on Colour n Graphcs, Imagng, and Vson Vdeo Object rackng Based On Extended Actve Shape Models Wth Color Informaton A. Koschan, S.K. Kang, J.K. Pak, B.
RELATIVE ORIENTATION ESTIMATION OF VIDEO STREAMS FROM A SINGLE PAN-TILT-ZOOM CAMERA. Commission I, WG I/5
 RELATIVE ORIENTATION ESTIMATION OF VIDEO STREAMS FROM A SINGLE PAN-TILT-ZOOM CAMERA Taeyoon Lee a, *, Taeung Km a, Gunho Sohn b, James Elder a a Department of Geonformatc Engneerng, Inha Unersty, 253 Yonghyun-dong,
RELATIVE ORIENTATION ESTIMATION OF VIDEO STREAMS FROM A SINGLE PAN-TILT-ZOOM CAMERA Taeyoon Lee a, *, Taeung Km a, Gunho Sohn b, James Elder a a Department of Geonformatc Engneerng, Inha Unersty, 253 Yonghyun-dong,
What is Object Detection? Face Detection using AdaBoost. Detection as Classification. Principle of Boosting (Schapire 90)
") CIS 5543 Coputer Vson Object Detecton What s Object Detecton? Locate an object n an nput age Habn Lng Extensons Vola & Jones, 2004 Dalal & Trggs, 2005 one or ultple objects Object segentaton Object detecton
CIS 5543 Coputer Vson Object Detecton What s Object Detecton? Locate an object n an nput age Habn Lng Extensons Vola & Jones, 2004 Dalal & Trggs, 2005 one or ultple objects Object segentaton Object detecton
An Image Fusion Approach Based on Segmentation Region
 Rong Wang, L-Qun Gao, Shu Yang, Yu-Hua Cha, and Yan-Chun Lu An Image Fuson Approach Based On Segmentaton Regon An Image Fuson Approach Based on Segmentaton Regon Rong Wang, L-Qun Gao, Shu Yang 3, Yu-Hua
Rong Wang, L-Qun Gao, Shu Yang, Yu-Hua Cha, and Yan-Chun Lu An Image Fuson Approach Based On Segmentaton Regon An Image Fuson Approach Based on Segmentaton Regon Rong Wang, L-Qun Gao, Shu Yang 3, Yu-Hua
Local features and image matching May 8 th, 2018
 Local features and image matcing May 8 t, 2018 Yong Jae Lee UC Davis Last time RANSAC for robust fitting Lines, translation Image mosaics Fitting a 2D transformation Homograpy 2 Today Mosaics recap: How
Local features and image matcing May 8 t, 2018 Yong Jae Lee UC Davis Last time RANSAC for robust fitting Lines, translation Image mosaics Fitting a 2D transformation Homograpy 2 Today Mosaics recap: How
A Factorization Approach to Structure from Motion with Shape Priors
 A Factorzaton Approach to Structure from Moton wth Shape Prors Alesso Del Bue Insttute for Systems and Robotcs Insttuto Superor Técnco Av. Rovsco Pas 1 1049-001 Lsboa Portugal http://www.sr.st.utl.pt/
A Factorzaton Approach to Structure from Moton wth Shape Prors Alesso Del Bue Insttute for Systems and Robotcs Insttuto Superor Técnco Av. Rovsco Pas 1 1049-001 Lsboa Portugal http://www.sr.st.utl.pt/
Improving Initial Estimations for Structure from Motion Methods
 Improvng Intal Estmatons for Structure from Moton Methods Chrstopher Schwartz Renhard Klen Insttute for Computer Scence II, Unversty of Bonn Abstract In Computer Graphcs as well as n Computer Vson and
Improvng Intal Estmatons for Structure from Moton Methods Chrstopher Schwartz Renhard Klen Insttute for Computer Scence II, Unversty of Bonn Abstract In Computer Graphcs as well as n Computer Vson and
Implementation of a Dynamic Image-Based Rendering System
 Implementaton of a Dynamc Image-Based Renderng System Nklas Bakos, Claes Järvman and Mark Ollla 3 Norrköpng Vsualzaton and Interacton Studo Lnköpng Unversty Abstract Work n dynamc mage based renderng has
Implementaton of a Dynamc Image-Based Renderng System Nklas Bakos, Claes Järvman and Mark Ollla 3 Norrköpng Vsualzaton and Interacton Studo Lnköpng Unversty Abstract Work n dynamc mage based renderng has
FEATURE EXTRACTION. Dr. K.Vijayarekha. Associate Dean School of Electrical and Electronics Engineering SASTRA University, Thanjavur
 FEATURE EXTRACTION Dr. K.Vjayarekha Assocate Dean School of Electrcal and Electroncs Engneerng SASTRA Unversty, Thanjavur613 41 Jont Intatve of IITs and IISc Funded by MHRD Page 1 of 8 Table of Contents
FEATURE EXTRACTION Dr. K.Vjayarekha Assocate Dean School of Electrcal and Electroncs Engneerng SASTRA Unversty, Thanjavur613 41 Jont Intatve of IITs and IISc Funded by MHRD Page 1 of 8 Table of Contents
Simplification of 3D Meshes
 Smplfcaton of 3D Meshes Addy Ngan /4/00 Outlne Motvaton Taxonomy of smplfcaton methods Hoppe et al, Mesh optmzaton Hoppe, Progressve meshes Smplfcaton of 3D Meshes 1 Motvaton Hgh detaled meshes becomng
Smplfcaton of 3D Meshes Addy Ngan /4/00 Outlne Motvaton Taxonomy of smplfcaton methods Hoppe et al, Mesh optmzaton Hoppe, Progressve meshes Smplfcaton of 3D Meshes 1 Motvaton Hgh detaled meshes becomng
Fitting: Deformable contours April 26 th, 2018
 4/6/08 Fttng: Deformable contours Aprl 6 th, 08 Yong Jae Lee UC Davs Recap so far: Groupng and Fttng Goal: move from array of pxel values (or flter outputs) to a collecton of regons, objects, and shapes.
4/6/08 Fttng: Deformable contours Aprl 6 th, 08 Yong Jae Lee UC Davs Recap so far: Groupng and Fttng Goal: move from array of pxel values (or flter outputs) to a collecton of regons, objects, and shapes.
Investigations of Topology and Shape of Multi-material Optimum Design of Structures
 Advanced Scence and Tecnology Letters Vol.141 (GST 2016), pp.241-245 ttp://dx.do.org/10.14257/astl.2016.141.52 Investgatons of Topology and Sape of Mult-materal Optmum Desgn of Structures Quoc Hoan Doan
Advanced Scence and Tecnology Letters Vol.141 (GST 2016), pp.241-245 ttp://dx.do.org/10.14257/astl.2016.141.52 Investgatons of Topology and Sape of Mult-materal Optmum Desgn of Structures Quoc Hoan Doan
Discriminative classifiers for object classification. Last time
 Dscrmnatve classfers for object classfcaton Thursday, Nov 12 Krsten Grauman UT Austn Last tme Supervsed classfcaton Loss and rsk, kbayes rule Skn color detecton example Sldng ndo detecton Classfers, boostng
Dscrmnatve classfers for object classfcaton Thursday, Nov 12 Krsten Grauman UT Austn Last tme Supervsed classfcaton Loss and rsk, kbayes rule Skn color detecton example Sldng ndo detecton Classfers, boostng
Multi-view 3D Position Estimation of Sports Players
 Mult-vew 3D Poston Estmaton of Sports Players Robbe Vos and Wlle Brnk Appled Mathematcs Department of Mathematcal Scences Unversty of Stellenbosch, South Afrca Emal: vosrobbe@gmal.com Abstract The problem
Mult-vew 3D Poston Estmaton of Sports Players Robbe Vos and Wlle Brnk Appled Mathematcs Department of Mathematcal Scences Unversty of Stellenbosch, South Afrca Emal: vosrobbe@gmal.com Abstract The problem
A New Method for Automatically Labeling Aircrafts in Airport Video
 MAEC Web of Conferences, 05 01 0 ( 015) DOI: 10.1051/ matecconf/ 01505010 C Owned by te autors, publsed by EDP Scences, 015 A New Metod for Automatcally Labelng Arcrafts n Arport Vdeo Xao Luo, Yong ang*,
MAEC Web of Conferences, 05 01 0 ( 015) DOI: 10.1051/ matecconf/ 01505010 C Owned by te autors, publsed by EDP Scences, 015 A New Metod for Automatcally Labelng Arcrafts n Arport Vdeo Xao Luo, Yong ang*,
Introduction to Multiview Rank Conditions and their Applications: A Review.
 Introducton to Multvew Rank Condtons and ther Applcatons: A Revew Jana Košecká Y Ma Department of Computer Scence, George Mason Unversty Electrcal & Computer Engneerng Department, Unversty of Illnos at
Introducton to Multvew Rank Condtons and ther Applcatons: A Revew Jana Košecká Y Ma Department of Computer Scence, George Mason Unversty Electrcal & Computer Engneerng Department, Unversty of Illnos at
Sum of Linear and Fractional Multiobjective Programming Problem under Fuzzy Rules Constraints
 Australan Journal of Basc and Appled Scences, 2(4): 1204-1208, 2008 ISSN 1991-8178 Sum of Lnear and Fractonal Multobjectve Programmng Problem under Fuzzy Rules Constrants 1 2 Sanjay Jan and Kalash Lachhwan
Australan Journal of Basc and Appled Scences, 2(4): 1204-1208, 2008 ISSN 1991-8178 Sum of Lnear and Fractonal Multobjectve Programmng Problem under Fuzzy Rules Constrants 1 2 Sanjay Jan and Kalash Lachhwan
Motivation. Matching, Alignment, and Registration. Components in Matching. Image Alignment
 Matcng, Algnent, and Regstraton CIS 554 Coputer Vson Habn Lng Motvaton ransforaton between two enttes are often requested n an vson tass Iage algnent Pont set atcng Surface regstraton Contour atcng Snons
Matcng, Algnent, and Regstraton CIS 554 Coputer Vson Habn Lng Motvaton ransforaton between two enttes are often requested n an vson tass Iage algnent Pont set atcng Surface regstraton Contour atcng Snons
Resolving Ambiguity in Depth Extraction for Motion Capture using Genetic Algorithm
 Resolvng Ambguty n Depth Extracton for Moton Capture usng Genetc Algorthm Yn Yee Wa, Ch Kn Chow, Tong Lee Computer Vson and Image Processng Laboratory Dept. of Electronc Engneerng The Chnese Unversty of
Resolvng Ambguty n Depth Extracton for Moton Capture usng Genetc Algorthm Yn Yee Wa, Ch Kn Chow, Tong Lee Computer Vson and Image Processng Laboratory Dept. of Electronc Engneerng The Chnese Unversty of
Articulated Tree Structure from Motion A Matrix Factorisation Approach
 Artculated Tree Structure from Moton A Matrx Factorsaton Approach arl Scheffler, Konrad H Scheffler, hrstan Omln Department of omputer Scence Unversty of the estern ape 7535 ellvlle, South Afrca cscheffler,
Artculated Tree Structure from Moton A Matrx Factorsaton Approach arl Scheffler, Konrad H Scheffler, hrstan Omln Department of omputer Scence Unversty of the estern ape 7535 ellvlle, South Afrca cscheffler,
Towards Direct Recovery of Shape and Motion Parameters from Image Sequences
 Towards Drect Recovery of Shape and Moton arameters from Image Sequences Stephen Benot and Frank. Ferre McGll Unversty, Center for Intellgent Machnes, 4 Unversty St., Montréal, Québec, CANADA HA A7 Tel.:
Towards Drect Recovery of Shape and Moton arameters from Image Sequences Stephen Benot and Frank. Ferre McGll Unversty, Center for Intellgent Machnes, 4 Unversty St., Montréal, Québec, CANADA HA A7 Tel.:
Priority queues and heaps Professors Clark F. Olson and Carol Zander
 Prorty queues and eaps Professors Clark F. Olson and Carol Zander Prorty queues A common abstract data type (ADT) n computer scence s te prorty queue. As you mgt expect from te name, eac tem n te prorty
Prorty queues and eaps Professors Clark F. Olson and Carol Zander Prorty queues A common abstract data type (ADT) n computer scence s te prorty queue. As you mgt expect from te name, eac tem n te prorty
Face Recognition University at Buffalo CSE666 Lecture Slides Resources:
 Face Recognton Unversty at Buffalo CSE666 Lecture Sldes Resources: http://www.face-rec.org/algorthms/ Overvew of face recognton algorthms Correlaton - Pxel based correspondence between two face mages Structural
Face Recognton Unversty at Buffalo CSE666 Lecture Sldes Resources: http://www.face-rec.org/algorthms/ Overvew of face recognton algorthms Correlaton - Pxel based correspondence between two face mages Structural
SUV Color Space & Filtering. Computer Vision I. CSE252A Lecture 9. Announcement. HW2 posted If microphone goes out, let me know
 SUV Color Space & Flterng CSE5A Lecture 9 Announceent HW posted f cropone goes out let e now Uncalbrated Potoetrc Stereo Taeaways For calbrated potoetrc stereo we estated te n by 3 atrx B of surface norals
SUV Color Space & Flterng CSE5A Lecture 9 Announceent HW posted f cropone goes out let e now Uncalbrated Potoetrc Stereo Taeaways For calbrated potoetrc stereo we estated te n by 3 atrx B of surface norals
LOOP ANALYSIS. The second systematic technique to determine all currents and voltages in a circuit
 LOOP ANALYSS The second systematic technique to determine all currents and voltages in a circuit T S DUAL TO NODE ANALYSS - T FRST DETERMNES ALL CURRENTS N A CRCUT AND THEN T USES OHM S LAW TO COMPUTE
LOOP ANALYSS The second systematic technique to determine all currents and voltages in a circuit T S DUAL TO NODE ANALYSS - T FRST DETERMNES ALL CURRENTS N A CRCUT AND THEN T USES OHM S LAW TO COMPUTE
Active Contours/Snakes
 Actve Contours/Snakes Erkut Erdem Acknowledgement: The sldes are adapted from the sldes prepared by K. Grauman of Unversty of Texas at Austn Fttng: Edges vs. boundares Edges useful sgnal to ndcate occludng
Actve Contours/Snakes Erkut Erdem Acknowledgement: The sldes are adapted from the sldes prepared by K. Grauman of Unversty of Texas at Austn Fttng: Edges vs. boundares Edges useful sgnal to ndcate occludng
A novel framework for motion segmentation and tracking by clustering incomplete trajectories
 A novel framewor for moton segmentaton and tracng by clusterng ncomplete trajectores Vasleos Karavasls, Konstantnos Bleas, Chrstophoros Nou Department of Computer Scence, Unversty of Ioannna, PO Box 1186,
A novel framewor for moton segmentaton and tracng by clusterng ncomplete trajectores Vasleos Karavasls, Konstantnos Bleas, Chrstophoros Nou Department of Computer Scence, Unversty of Ioannna, PO Box 1186,
Multi-body Segmentation: Revisiting Motion Consistency Λ
 Mult-body Segmentaton: Revstng Moton Consstency Λ Lh Zelnk-Manor Moshe Machlne Mchal Iran Dept. of Computer Scence and Appled Math The Wezmann Insttute of Scence 76 Rehovot, Israel Abstract Dynamc analyss
Mult-body Segmentaton: Revstng Moton Consstency Λ Lh Zelnk-Manor Moshe Machlne Mchal Iran Dept. of Computer Scence and Appled Math The Wezmann Insttute of Scence 76 Rehovot, Israel Abstract Dynamc analyss
A Scalable Projective Bundle Adjustment Algorithm using the L Norm
 Sxth Indan Conference on Computer Vson, Graphcs & Image Processng A Scalable Projectve Bundle Adjustment Algorthm usng the Norm Kaushk Mtra and Rama Chellappa Dept. of Electrcal and Computer Engneerng
Sxth Indan Conference on Computer Vson, Graphcs & Image Processng A Scalable Projectve Bundle Adjustment Algorthm usng the Norm Kaushk Mtra and Rama Chellappa Dept. of Electrcal and Computer Engneerng
Aligning Non-Overlapping Sequences,
 Internatonal Journal of Computer Vson 48(1), 39 51, 2002 c 2002 Kluwer Academc Publshers. Manufactured n The Netherlands. Algnng Non-Overlappng Sequences, YARON CASPI AND MICHAL IRANI Department of Computer
Internatonal Journal of Computer Vson 48(1), 39 51, 2002 c 2002 Kluwer Academc Publshers. Manufactured n The Netherlands. Algnng Non-Overlappng Sequences, YARON CASPI AND MICHAL IRANI Department of Computer
CS 534: Computer Vision Model Fitting
 CS 534: Computer Vson Model Fttng Sprng 004 Ahmed Elgammal Dept of Computer Scence CS 534 Model Fttng - 1 Outlnes Model fttng s mportant Least-squares fttng Maxmum lkelhood estmaton MAP estmaton Robust
CS 534: Computer Vson Model Fttng Sprng 004 Ahmed Elgammal Dept of Computer Scence CS 534 Model Fttng - 1 Outlnes Model fttng s mportant Least-squares fttng Maxmum lkelhood estmaton MAP estmaton Robust
y and the total sum of
 Lnear regresson Testng for non-lnearty In analytcal chemstry, lnear regresson s commonly used n the constructon of calbraton functons requred for analytcal technques such as gas chromatography, atomc absorpton
Lnear regresson Testng for non-lnearty In analytcal chemstry, lnear regresson s commonly used n the constructon of calbraton functons requred for analytcal technques such as gas chromatography, atomc absorpton
Reconstruction of Rigid Body Models from Motion Distorted Laser Range Data Using Optical Flow
 Reconstructon of Rgd Body Models from Moton Dstorted Laser Range Data Usng Optcal Flow Eddy Ilg Raner Kümmerle Wolfram Burgard Thomas Brox Abstract The setup of tltng a 2D laser range fnder up and down
Reconstructon of Rgd Body Models from Moton Dstorted Laser Range Data Usng Optcal Flow Eddy Ilg Raner Kümmerle Wolfram Burgard Thomas Brox Abstract The setup of tltng a 2D laser range fnder up and down
An Application of the Dulmage-Mendelsohn Decomposition to Sparse Null Space Bases of Full Row Rank Matrices
 Internatonal Mathematcal Forum, Vol 7, 2012, no 52, 2549-2554 An Applcaton of the Dulmage-Mendelsohn Decomposton to Sparse Null Space Bases of Full Row Rank Matrces Mostafa Khorramzadeh Department of Mathematcal
Internatonal Mathematcal Forum, Vol 7, 2012, no 52, 2549-2554 An Applcaton of the Dulmage-Mendelsohn Decomposton to Sparse Null Space Bases of Full Row Rank Matrces Mostafa Khorramzadeh Department of Mathematcal
Edge Detection in Noisy Images Using the Support Vector Machines
 Edge Detecton n Nosy Images Usng the Support Vector Machnes Hlaro Gómez-Moreno, Saturnno Maldonado-Bascón, Francsco López-Ferreras Sgnal Theory and Communcatons Department. Unversty of Alcalá Crta. Madrd-Barcelona
Edge Detecton n Nosy Images Usng the Support Vector Machnes Hlaro Gómez-Moreno, Saturnno Maldonado-Bascón, Francsco López-Ferreras Sgnal Theory and Communcatons Department. Unversty of Alcalá Crta. Madrd-Barcelona
Recovering Camera Pose from Omni-directional Images
 Recoveg Camera Pose from Omn-drectonal Images Ada S.K. WAN 1 Angus M.K. SIU 1 Rynson W.H. LAU 1,2 1 Department of Computer Scence, Cty Unversty of Hong Kong, Hong Kong 2 Department of CEIT, Cty Unversty
Recoveg Camera Pose from Omn-drectonal Images Ada S.K. WAN 1 Angus M.K. SIU 1 Rynson W.H. LAU 1,2 1 Department of Computer Scence, Cty Unversty of Hong Kong, Hong Kong 2 Department of CEIT, Cty Unversty
Visual motion. Many slides adapted from S. Seitz, R. Szeliski, M. Pollefeys
 Visual motion Man slides adapted from S. Seitz, R. Szeliski, M. Pollefes Motion and perceptual organization Sometimes, motion is the onl cue Motion and perceptual organization Sometimes, motion is the
Visual motion Man slides adapted from S. Seitz, R. Szeliski, M. Pollefes Motion and perceptual organization Sometimes, motion is the onl cue Motion and perceptual organization Sometimes, motion is the
Vanishing Hull. Jinhui Hu, Suya You, Ulrich Neumann University of Southern California {jinhuihu,suyay,
 Vanshng Hull Jnhu Hu Suya You Ulrch Neumann Unversty of Southern Calforna {jnhuhusuyay uneumann}@graphcs.usc.edu Abstract Vanshng ponts are valuable n many vson tasks such as orentaton estmaton pose recovery
Vanshng Hull Jnhu Hu Suya You Ulrch Neumann Unversty of Southern Calforna {jnhuhusuyay uneumann}@graphcs.usc.edu Abstract Vanshng ponts are valuable n many vson tasks such as orentaton estmaton pose recovery
Outline. Seamless Image Stitching in the Gradient Domain. Related Approaches. Image Stitching. Introduction Related Work
 Outlne Seamless Image Sttchng n the Gradent Doman Anat Levn, Assaf Zomet, Shmuel Peleg and Yar Wess ECCV 004 Presenter: Pn Wu Oct 007 Introducton Related Work GIST: Gradent-doman Image Sttchng GIST GIST
Outlne Seamless Image Sttchng n the Gradent Doman Anat Levn, Assaf Zomet, Shmuel Peleg and Yar Wess ECCV 004 Presenter: Pn Wu Oct 007 Introducton Related Work GIST: Gradent-doman Image Sttchng GIST GIST
Parallelism for Nested Loops with Non-uniform and Flow Dependences
 Parallelsm for Nested Loops wth Non-unform and Flow Dependences Sam-Jn Jeong Dept. of Informaton & Communcaton Engneerng, Cheonan Unversty, 5, Anseo-dong, Cheonan, Chungnam, 330-80, Korea. seong@cheonan.ac.kr
Parallelsm for Nested Loops wth Non-unform and Flow Dependences Sam-Jn Jeong Dept. of Informaton & Communcaton Engneerng, Cheonan Unversty, 5, Anseo-dong, Cheonan, Chungnam, 330-80, Korea. seong@cheonan.ac.kr
Long-Term Moving Object Segmentation and Tracking Using Spatio-Temporal Consistency
 Long-Term Movng Obect Segmentaton Trackng Usng Spato-Temporal Consstency D Zhong Shh-Fu Chang {dzhong, sfchang}@ee.columba.edu Department of Electrcal Engneerng, Columba Unversty, NY, USA Abstract The
Long-Term Movng Obect Segmentaton Trackng Usng Spato-Temporal Consstency D Zhong Shh-Fu Chang {dzhong, sfchang}@ee.columba.edu Department of Electrcal Engneerng, Columba Unversty, NY, USA Abstract The
Applicability of Non-Rigid Medical Image Registration using Moving Least Squares
 010 Internatonal Journal of Computer Applcatons (0975 8887) Applcablty of Non-Rgd Medcal Image Regstraton usng Movng Least Squares Ms.Hema P Menon Department of Computer Scence and Engneerng Amrta School
010 Internatonal Journal of Computer Applcatons (0975 8887) Applcablty of Non-Rgd Medcal Image Regstraton usng Movng Least Squares Ms.Hema P Menon Department of Computer Scence and Engneerng Amrta School
Region Segmentation Readings: Chapter 10: 10.1 Additional Materials Provided
 Regon Segmentaton Readngs: hater 10: 10.1 Addtonal Materals Provded K-means lusterng tet EM lusterng aer Grah Parttonng tet Mean-Shft lusterng aer 1 Image Segmentaton Image segmentaton s the oeraton of
Regon Segmentaton Readngs: hater 10: 10.1 Addtonal Materals Provded K-means lusterng tet EM lusterng aer Grah Parttonng tet Mean-Shft lusterng aer 1 Image Segmentaton Image segmentaton s the oeraton of
Realtime Moving Object Detection from a Freely Moving Monocular Camera
 Realtme Movng Object Detecton from a Freely Movng Monocular Camera Abhjt Kundu, C. V. Jawahar and K Madhava Krshna Abstract Detecton of movng objects s a key component n moble robotc percepton and understandng
Realtme Movng Object Detecton from a Freely Movng Monocular Camera Abhjt Kundu, C. V. Jawahar and K Madhava Krshna Abstract Detecton of movng objects s a key component n moble robotc percepton and understandng
LECTURE : MANIFOLD LEARNING
 LECTURE : MANIFOLD LEARNING Rta Osadchy Some sldes are due to L.Saul, V. C. Raykar, N. Verma Topcs PCA MDS IsoMap LLE EgenMaps Done! Dmensonalty Reducton Data representaton Inputs are real-valued vectors
LECTURE : MANIFOLD LEARNING Rta Osadchy Some sldes are due to L.Saul, V. C. Raykar, N. Verma Topcs PCA MDS IsoMap LLE EgenMaps Done! Dmensonalty Reducton Data representaton Inputs are real-valued vectors
An Attention Based Method For Motion Detection And Estimation
 An Attenton Based Method For Moton Detecton And Estmaton Shje Zhang and Fred Stentford Department of Electronc and Electrcal Engneerng Unversty College London, Adastral Par Campus, Ross Buldng Martlesham
An Attenton Based Method For Moton Detecton And Estmaton Shje Zhang and Fred Stentford Department of Electronc and Electrcal Engneerng Unversty College London, Adastral Par Campus, Ross Buldng Martlesham
A Fast Content-Based Multimedia Retrieval Technique Using Compressed Data
 A Fast Content-Based Multmeda Retreval Technque Usng Compressed Data Borko Furht and Pornvt Saksobhavvat NSF Multmeda Laboratory Florda Atlantc Unversty, Boca Raton, Florda 3343 ABSTRACT In ths paper,
A Fast Content-Based Multmeda Retreval Technque Usng Compressed Data Borko Furht and Pornvt Saksobhavvat NSF Multmeda Laboratory Florda Atlantc Unversty, Boca Raton, Florda 3343 ABSTRACT In ths paper,
Robust Inlier Feature Tracking Method for Multiple Pedestrian Tracking
 2011 Internatonal Conference on Informaton and Intellgent Computng IPCSIT vol.18 (2011) (2011) IACSIT Press, Sngapore Robust Inler Feature Trackng Method for Multple Pedestran Trackng Young-Chul Lm a*
2011 Internatonal Conference on Informaton and Intellgent Computng IPCSIT vol.18 (2011) (2011) IACSIT Press, Sngapore Robust Inler Feature Trackng Method for Multple Pedestran Trackng Young-Chul Lm a*
Fusion of Data from Head-Mounted and Fixed Sensors 1
 Frst Internatonal Workshop on Augmented Realty, Nov., 998, San Francsco. Fuson of Data from Head-ounted and Fxed Sensors Abstract Wllam A. Hoff Engneerng Dvson, Colorado School of nes Golden, Colorado
Frst Internatonal Workshop on Augmented Realty, Nov., 998, San Francsco. Fuson of Data from Head-ounted and Fxed Sensors Abstract Wllam A. Hoff Engneerng Dvson, Colorado School of nes Golden, Colorado
Reducing Frame Rate for Object Tracking
 Reducng Frame Rate for Object Trackng Pavel Korshunov 1 and We Tsang Oo 2 1 Natonal Unversty of Sngapore, Sngapore 11977, pavelkor@comp.nus.edu.sg 2 Natonal Unversty of Sngapore, Sngapore 11977, oowt@comp.nus.edu.sg
Reducng Frame Rate for Object Trackng Pavel Korshunov 1 and We Tsang Oo 2 1 Natonal Unversty of Sngapore, Sngapore 11977, pavelkor@comp.nus.edu.sg 2 Natonal Unversty of Sngapore, Sngapore 11977, oowt@comp.nus.edu.sg
A Volumetric Approach for Interactive 3D Modeling
 A Volumetrc Approach for Interactve 3D Modelng Dragan Tubć Patrck Hébert Computer Vson and Systems Laboratory Laval Unversty, Ste-Foy, Québec, Canada, G1K 7P4 Dens Laurendeau E-mal: (tdragan, hebert, laurendeau)@gel.ulaval.ca
A Volumetrc Approach for Interactve 3D Modelng Dragan Tubć Patrck Hébert Computer Vson and Systems Laboratory Laval Unversty, Ste-Foy, Québec, Canada, G1K 7P4 Dens Laurendeau E-mal: (tdragan, hebert, laurendeau)@gel.ulaval.ca