Alignment and Object Instance Recognition
|
|
|
- Ronald Garrett
- 6 years ago
- Views:
Transcription
1 Algnment and Object Instance Recognton Computer Vson Ja-Bn Huang, Vrgna Tech Man sldes from S. Lazebnk and D. Hoem
2 Admnstratve Stuffs HW 2 due 11:59 PM Oct 9
3 Anonmous feedback Lectures Mcrophone on our shrt. A lttle quck to follow Make the topcs easer to understand Thanks for the feedback. I wll adjust the contents. Homeworks Mnor mstakes n HW1 Too man assgnments. You are expectng too much. Wll provde explct starter code structure and hnts. Other aspects Real-world demo frst, then explan the foundaton Wll do.
4 Toda s class Revew fttng Algnment Object nstance recognton Gong over HW 2
5 Prevous class Global optmzaton / Search for parameters Least squares ft Robust least squares Iteratve closest pont (ICP) Hpothesze and test Generalzed Hough transform RANSAC
6 Least squares lne fttng Data: (x 1, 1 ),, (x n, n ) Lne equaton: = m x + b Fnd (m, b) to mnmze A Ap A T T dp de ) ( ) ( ) 2( Ap Ap Ap Ap T T T n n n b m x x b m x E n b mx E 1 2 ) ( (x, ) =mx+b A A A p A Ap A T T T T 1 Matlab: p = A \ ; Modfed from S. Lazebnk
7 Least squares lne fttng functon [m, b] = lsqft(x, ) % = mx + b % fnd lne that best predcts gven x % mnmze sum_ (m*x_ + b - _).^2 A = [x(:) ones(numel(x), 1)]; b = (:); p = A\b; m = p(1); b = p(2); A p
8 Total least squares Fnd (a, b, c) to mnmze the sum of squared perpendcular dstances E n 1 ( ax b c) 2 E n 1 Slde modfed from S. Lazebnk 2 ( ax(x b, d ) ax+b+c=0 Unt normal: N=(a, b) E n a 2( ) 0 1 ax b c c c n 2 x1 x 1 n a E 2 a x p x b ( ( ) ( )) 1 b xn x n T T T T T p A Ap mnmze p A Ap s.t. p p 1 mnmze T p p n b n x ax b 1 1 n Soluton s egenvector correspondng to smallest egenvalue of A T A T A T Ap See detals on Ralegh Quotent:
9 Total least squares functon [m, b, err] = total_lsqft(x, ) % ax + b + c = 0 % dstance to lne for (a^2+b^2=1): dst_sq = (ax + b + c).^2 A = [x(:)-mean(x) (:)-mean()]; [v, d] = eg(a'*a); p = v(:, 1); % egenvector corr. to smaller egenvalue % get a, b, c parameters a = p(1); b = p(2); c = -(a*mean(x)+b*mean()); err = (a*x+b*+c).^2; % convert to slope-ntercept (m, b) m = -a/b; b = -c/b; % note: ths b s for slope-ntercept now A p
10 Robust Estmator 1. Intalze: e.g., choose θ b least squares ft and 1.5 medan 2. Choose params to mnmze: E.g., numercal optmzaton error 2 error(, data error(, data ) 2 ) 2 3. Compute new 1.5 medan error 4. Repeat (2) and (3) untl convergence
11 functon [m, b] = robust_lsqft(x, ) % teratve robust ft = mx + b % fnd lne that best predcts gven x % mnmze sum_ (m*x_ + b - _).^2 [m, b] = lsqft(x, ); p = [m ; b]; err = sqrt((-p(1)*x-p(2)).^2); sgma = medan(err)*1.5; for k = 1:7 p = fmnunc(@(p)geterr(p,x,,sgma), p); err = sqrt((-p(1)*x-p(2)).^2); sgma = medan(err)*1.5; end m = p(1); b = p(2);
12 Hough transform P.V.C. Hough, Machne Analss of Bubble Chamber Pctures, Proc. Int. Conf. Hgh Energ Accelerators and Instrumentaton, 1959 Use a polar representaton for the parameter space x cos sn x Hough space Slde from S. Savarese
13 functon [m, b] = houghft(x, ) % = mx + b % x*cos(theta) + *sn(theta) = r % fnd lne that best predcts gven x % mnmze sum_ (m*x_ + b - _).^2 thetas = (-p+p/50):(p/100):p; costhetas = cos(thetas); snthetas = sn(thetas); mnr = 0; stepr = 0.005; maxr = 1; % count hough votes counts = zeros(numel(thetas),(maxr-mnr)/stepr+1); for k = 1:numel(x) end r = x(k)*costhetas + (k)*snthetas; % onl count parameters wthn the range of r nrange = fnd(r >= mnr & r <= maxr); rnum = round((r(nrange)-mnr)/stepr)+1; nd = sub2nd(sze(counts), nrange, rnum); counts(nd) = counts(nd) + 1; % smooth the bn counts counts = mflter(counts, fspecal('gaussan', 5, 0.75)); % get best theta, rho and show counts [maxval, maxnd] = max(counts(:)); [thetand, rnd] = nd2sub(sze(counts), maxnd); theta = thetas(thetand); r = mnr + stepr*(rnd-1); % convert to slope-ntercept b = r/sn(theta); m = -cos(theta)/sn(theta);
14 RANSAC Algorthm: 1. Sample (randoml) the number of ponts requred to ft the model (#=2) 2. Solve for model parameters usng samples 3. Score b the fracton of nlers wthn a preset threshold of the model Repeat 1-3 untl the best model s found wth hgh confdence N I 14
15 functon [m, b] = ransacft(x, ) % = mx + b N = 200; thresh = 0.03; bestcount = 0; for k = 1:N rp = randperm(numel(x)); tx = x(rp(1:2)); t = (rp(1:2)); m = (t(2)-t(1))./ (tx(2)-tx(1)); b = t(2)-m*tx(2); nn = sum(abs(-m*x-b)<thresh); f nn > bestcount bestcount = nn; nlers = (abs( - m*x - b) < thresh); end end % total least square fttng on nlers [m, b] = total_lsqft(x(nlers), (nlers));
16 Lne fttng demo demo_lneft(npts, outlers, nose, method) npts: number of ponts outlers: number of outlers nose: nose level Method lsq: least squares tlsq: total least squares rlsq: robust least squares hough: hough transform ransac: RANSAC
17 Whch algorthm should I use? If we know whch ponts belong to the lne, how do we fnd the optmal lne parameters? Least squares What f there are outlers? Robust fttng, RANSAC What f there are man lnes? Votng methods: RANSAC, Hough transform Slde credt: S. Lazebnk
18 Algnment as fttng Prevous lectures: fttng a model to features n one mage M x Fnd model M that mnmzes resdual( x, M ) Algnment: fttng a model to a transformaton between pars of features (matches) n two mages x T x ' Fnd transformaton T that mnmzes resdual( T ( x ), x )


19 What f ou want to algn but have no pror matched pars? Hough transform and RANSAC not applcable Important applcatons Medcal magng: match bran scans or contours Robotcs: match pont clouds
20 Iteratve Closest Ponts (ICP) Algorthm Goal: estmate transform between two dense sets of ponts 1. Intalze transformaton (e.g., compute dfference n means and scale) 2. Assgn each pont n {Set 1} to ts nearest neghbor n {Set 2} 3. Estmate transformaton parameters e.g., least squares or robust least squares 4. Transform the ponts n {Set 1} usng estmated parameters 5. Repeat steps 2-4 untl change s ver small
21 Example: solvng for translaton A 1 A 2 A 3 B 1 B 2 B 3 Gven matched ponts n {A} and {B}, estmate the translaton of the object x B B x A A t t x
22 Example: solvng for translaton A 1 A 2 A B 1 3 (t x, t ) B 2 B 3 Least squares soluton 1. Wrte down objectve functon 2. Derved soluton a) Compute dervatve b) Compute soluton 3. Computatonal soluton a) Wrte n form Ax=b b) Solve usng pseudo-nverse or egenvalue decomposton x B B x 0 1 t t 0 1 x A A x x B 1 B 1 B n B n t t x x A 1 A 1 A n A n x
23 Example: solvng for translaton A 1 A 5 B 4 A 2 A B 1 3 (t x, t ) A 4 B 2 B 3 B 5 Problem: outlers RANSAC soluton 1. Sample a set of matchng ponts (1 par) 2. Solve for transformaton parameters 3. Score parameters wth number of nlers 4. Repeat steps 1-3 N tmes x B B x A A t t x
24 Example: solvng for translaton B 4 A 1 B 5 B 6 A 2 A B 1 3 (t x, t ) A 4 B 2 B 3 A 5 A 6 Problem: outlers, multple objects, and/or man-to-one matches Hough transform soluton 1. Intalze a grd of parameter values 2. Each matched par casts a vote for consstent values 3. Fnd the parameters wth the most votes 4. Solve usng least squares wth nlers x B B x A A t t x
25 Example: solvng for translaton (t x, t ) Problem: no ntal guesses for correspondence ICP soluton 1. Fnd nearest neghbors for each pont 2. Compute transform usng matches 3. Move ponts usng transform 4. Repeat steps 1-3 untl convergence x B B x A A t t x
26 Algorthm Summar Least Squares Ft closed form soluton robust to nose not robust to outlers Robust Least Squares mproves robustness to nose requres teratve optmzaton Hough transform robust to nose and outlers can ft multple models onl works for a few parameters (1-4 tpcall) RANSAC robust to nose and outlers works wth a moderate number of parameters (e.g, 1-8) Iteratve Closest Pont (ICP) For local algnment onl: does not requre ntal correspondences
27 Algnment Algnment: fnd parameters of model that maps one set of ponts to another Tpcall want to solve for a global transformaton that accounts for most true correspondences Dffcultes Nose (tpcall 1-3 pxels) Outlers (often 30-50%) Man-to-one matches or multple objects
28 Parametrc (global) warpng T p = (x,) p = (x, ) Transformaton T s a coordnate-changng machne: p = T(p) What does t mean that T s global? Is the same for an pont p can be descrbed b just a few numbers (parameters) For lnear transformatons, we can represent T as a matrx p = Tp x' x T '




29 Common transformatons orgnal Transformed translaton rotaton aspect affne perspectve Slde credt (next few sldes): A. Efros and/or S. Setz
30 Scalng Scalng a coordnate means multplng each of ts components b a scalar Unform scalng means ths scalar s the same for all components: 2
31 Scalng Non-unform scalng: dfferent scalars per component: X 2, Y 0.5
32 Scalng Scalng operaton: Or, n matrx form: x' ' ax b x' ' a 0 0 b x scalng matrx S
33 2-D Rotaton (x, ) (x, ) x = x cos() - sn() = x sn() + cos()
34 2-D Rotaton f (x, ) (x, ) Polar coordnates x = r cos (f) = r sn (f) x = r cos (f + ) = r sn (f + ) Trg Identt x = r cos(f) cos() r sn(f) sn() = r sn(f) cos() + r cos(f) sn() Substtute x = x cos() - sn() = x sn() + cos()
35 2-D Rotaton Ths s eas to capture n matrx form: x' ' sn x cos sn cos R Even though sn() and cos() are nonlnear functons of, x s a lnear combnaton of x and s a lnear combnaton of x and What s the nverse transformaton? Rotaton b For rotaton matrces 1 T R R
36 Basc 2D transformatons x' ' s x 0 0 s x x' ' 1 x 1 x Scale Shear x' ' cos sn x sn cos Rotate x Translate t t x x 1 x a d b e Affne x c f 1 Affne s an combnaton of translaton, scale, rotaton, shear
37 Affne Transformatons Affne transformatons are combnatons of Lnear transformatons, and Translatons Propertes of affne transformatons: Lnes map to lnes Parallel lnes reman parallel Ratos are preserved Closed under composton 1 x f e d c b a x ' ' x f e d c b a x or

38 Projectve Transformatons Projectve transformatons are combos of Affne transformatons, and Projectve warps x' ' w' a d g b e h c x f w Propertes of projectve transformatons: Lnes map to lnes Parallel lnes do not necessarl reman parallel Ratos are not preserved Closed under composton Models change of bass Projectve matrx s defned up to a scale (8 DOF)




39 Projectve Transformatons (homograph) The transformaton between two vews of a planar surface The transformaton between mages from two cameras that share the same center
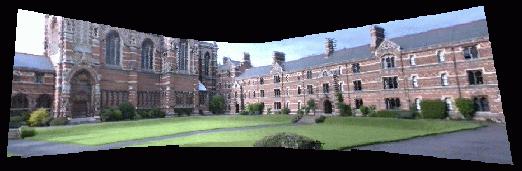








40 Applcaton: Panorama sttchng Source: Hartle & Zsserman

41 Applcaton: document scannng
42 2D mage transformatons (reference table)
43 Object Instance Recognton 1. Match keponts to object model 2. Solve for affne transformaton parameters 3. Score b nlers and choose solutons wth score above threshold A 1 A 2 A 3 Matched keponts Affne Parameters # Inlers Ths Class Choose hpothess wth max score above threshold
44 N pxels Overvew of Kepont Matchng 1. Fnd a set of dstnctve keponts A 1 A 2 A 3 2. Defne a regon around each kepont N pxels f A e.g. color d( f A, f B ) T f B e.g. color K. Grauman, B. Lebe 3. Extract and normalze the regon content 4. Compute a local descrptor from the normalzed regon 5. Match local descrptors
45 Fndng the objects (overvew) Input Image Stored Image 1. Match nterest ponts from nput mage to database mage 2. Matched ponts vote for rough poston/orentaton/scale of object 3. Fnd poston/orentaton/scales that have at least three votes 4. Compute affne regstraton and matches usng teratve least squares wth outler check 5. Report object f there are at least T matched ponts
46 Matchng Keponts Want to match keponts between: 1. Quer mage 2. Stored mage contanng the object Gven descrptor x 0, fnd two nearest neghbors x 1, x 2 wth dstances d 1, d 2 x 1 matches x 0 f d 1 /d 2 < 0.8 Ths gets rd of 90% false matches, 5% of true matches n Lowe s stud


47 Affne Object Model Accounts for 3D rotaton of a surface under orthographc projecton
48 Fttng an affne transformaton Assume we know the correspondences, how do we get the transformaton? ( x, ) x, ) ( x m m 1 3 m m 2 4 x t t 1 2 x Mx t Want to fnd M, t to mnmze n 1 x Mx t 2
49 Fttng an affne transformaton ), ( x ), ( x t t x m m m m x x t t m m m m x x Assume we know the correspondences, how do we get the transformaton?
50 Fttng an affne transformaton Lnear sstem wth sx unknowns Each match gves us two lnearl ndependent equatons: need at least three to solve for the transformaton parameters x t t m m m m x x
51 Fndng the objects (n detal) 1. Match nterest ponts from nput mage to database mage 2. Get locaton/scale/orentaton usng Hough votng In tranng, each pont has known poston/scale/orentaton wrt whole object Matched ponts vote for the poston, scale, and orentaton of the entre object Bns for x,, scale, orentaton Wde bns (0.25 object length n poston, 2x scale, 30 degrees orentaton) Vote for two closest bn centers n each drecton (16 votes total) 3. Geometrc verfcaton For each bn wth at least 3 keponts Iterate between least squares ft and checkng for nlers and outlers 4. Report object f > T nlers (T s tpcall 3, can be computed to match some probablstc threshold)

52 Examples of recognzed objects

53 Vew nterpolaton Tranng Gven mages of dfferent vewponts Cluster smlar vewponts usng feature matches Lnk features n adjacent vews Recognton Feature matches ma be spread over several tranng vewponts Use the known lnks to transfer votes to other vewponts [Lowe01] Slde credt: Davd Lowe

54 Applcatons Son Abo (Evoluton Robotcs) SIFT usage Recognze dockng staton Communcate wth vsual cards Other uses Place recognton Loop closure n SLAM K. Grauman, B. Lebe 54 Slde credt: Davd Lowe


55 Locaton Recognton Tranng [Lowe04] Slde credt: Davd Lowe




56 Another applcaton: categor recognton Goal: dentf what tpe of object s n the mage Approach: algn to known objects and choose categor wth best match? Shape matchng and object recognton usng low dstorton correspondence, Berg et al., CVPR 2005:

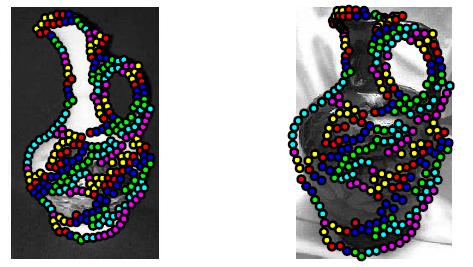
57 Examples of Matches

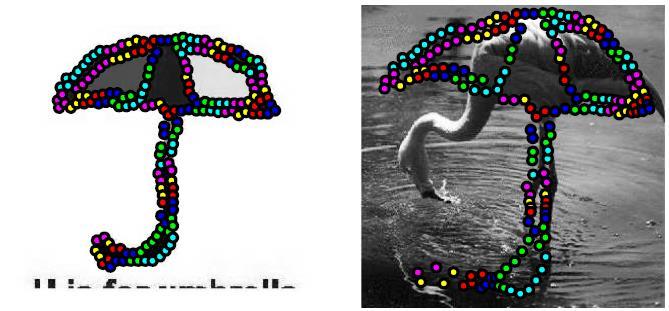
58 Examples of Matches
59 Other deas worth beng aware of Thn-plate splnes: combnes global affne warp wth smooth local deformaton Robust non-rgd pont matchng: A new pont matchng algorthm for non-rgd regstraton, CVIU 2003 (ncludes code, demo, paper)
; % Threshold for harrs corner detecton % Prob 1.1: kepont detecton ws = 7; [track_x, track_] =.")
60 HW 2: Feature Trackng functon featuretrackng % Man functon for feature trackng folder = '.\mages'; m = readimages(folder, 0:50); tau = 0.06; [pt_x, pt_] = getkeponts(m{1}, tau); % Threshold for harrs corner detecton % Prob 1.1: kepont detecton ws = 7; [track_x, track_] =... trackponts(pt_x, pt_, m, ws); % Trackng ws x ws patches % Prob 1.2 Kepont trackng % Vsualzng the feature tracks on the frst and the last frame fgure(2), magesc(m{1}), hold off, axs mage, colormap gra hold on, plot(track_x', track_', 'r');
61 HW 2 Feature/Kepont detecton Compute second moment matrx Harrs corner crteron Threshold Non-maxmum suppresson ) ( ) ( ) ( ) ( ) ( ), ( 2 2 D D x D x D x I D I I I I I I I g )] ( ) ( [ )] ( [ ) ( ) ( x x x I g I g I I g I g I g ] )), ( [trace( )], ( det[ 2 D I D I har 0.04
62 functon [kexs, keys] = getkeponts(m, tau) % m: nput mage; tau: threshold % kexs, keys: detected keponts, wth dmenson [N] x [1] % 0. Smooth mage (optonal) % 1. Compute mage gradents. Hnt: can use gradent % 2. Compute Ix*Ix, I*I, Ix*I % 3. Smooth Ix*Ix, I*I, Ix*I (locall weghted average) % 4. Compute Harrs corner score. Normalze the max to 1 % 5. Non-maxmum suppresson. Hnt: use ordflt2 % 6. Fnd postons whose values larger than tau. Hnt: use end fnd
63 functon [track_x, track_] = trackponts(pt_x, pt_, m, ws) % Trackng ntal ponts (pt_x, pt_) across the mage sequence % track_x: [Number of keponts] x [nm] % track_: [Number of keponts] x [nm] % Intalzaton N = numel(pt_x); % Number of keponts nm = numel(m); % Number of mages track_x = zeros(n, nm); track_ = zeros(n, nm); track_x(:, 1) = pt_x(:); track_(:, 1) = pt_(:); for t = 1:nm-1 % Trackng ponts from t to t+1 [track_x(:, t+1), track_(:, t+1)] =... getnextponts(track_x(:, t), track_(:, t), m{t}, m{t+1}, ws); end
64 Iteratve L-K algorthm Orgnal (x,) poston 1. Intalze (x, ) = (x,) 2. Compute (u,v) b I t = I(x,, t+1) - I(x,, t) 2 nd moment matrx for feature patch n frst mage dsplacement 3. Shft wndow b (u, v): x =x +u; = +v; 4. Recalculate I t 5. Repeat steps 2-4 untl small change Use nterpolaton for subpxel values
65 functon [x2, 2] = getnextponts(x,, m1, m2, ws) % Iteratve Lucas-Kanade feature trackng % (x, ) : ntalzed kepont poston n m1; (x2, 2): tracked kepont postons n m2 % ws: patch wndow sze % 1. Compute gradents from Im1 (get Ix and I) % 2. Grab patches of Ix, I, and m1. Hnt 1: use [X, Y] = meshgrd(-hw:hw,-hw:hw); to get patch ndex, where hw = floor(ws/2); Hnt 2: use nterp2 to sample non-nteger postons. for ter = 1:numIter % 5 teratons should be suffcent % Check f tracked patch are outsde the mage. Onl track vald patches. % For each kepont % - grab patch1 (centered at x1, 1), grab patch2 (centered at x2,2) % - compute It = patch2 patch1 % - grab Ix, I (centered at x1, 1) % - Set up matrx A and vector b % - Solve lnear sstem d = A\b. % - x2(p)=x2(p)+d(1); 2(p)=2(p)+d(1); -> Update the ncrement end
 Iteratve closest pont algorthm")
66 HW 2 Shape Algnment Global transformaton (smlart, affne, perspectve) Iteratve closest pont algorthm
67 functon Tfm = algn_shape(m1, m2) % m1: nput edge mage 1 % m2: nput edge mage 2 % Output: transformaton Tfm [3] x [3] % 1. Fnd edge ponts n m1 and m2. Hnt: use fnd % 2. Compute ntal transformaton (e.g., compute translaton and scalng b center of mass, varance wthn each mage) for = 1: 50 % 3. Get nearest neghbors: for each pont p fnd correspondng match() = argmn dst(p, qj) j % 4. Compute transformaton T based on matches % 5. Warp ponts p accordng to T end

68 HW 2 Local Feature Matchng Implement dstance rato test feature matchng algorthm
69 functon featurematchng m1 = mread('stop1.jpg'); m2 = mread('stop2.jpg'); % Load pre-computed SIFT features load('sift_features.mat'); % Descrptor1, Descrptor2: SIFT features % Frame1, Frame2: poston, scale, rotaton % For ever descrptor n m1, fnd the 1 st nearest neghbor and the 2 nd nearest neghbor n m2. % Compute dstance rato score. % Threshold and get the matches: a 2 x N arra of ndces that ndcates whch keponts from mage1 match whch ponts n mage 2 fgure(1), hold off, clf plotmatches(m2double(m1),m2double(m2),frame1,frame2,mat ches); % Dspla the matched keponts

70 Thngs to remember Algnment Hough transform RANSAC ICP Object nstance recognton Fnd keponts, compute descrptors Match descrptors Vote for / ft affne parameters Return object f # nlers > T




71 What have we learned? Interest ponts Fnd dstnct and repeatable ponts n mages Harrs-> corners, DoG -> blobs SIFT -> feature descrptor Feature trackng and optcal flow Fnd moton of a kepont/pxel over tme Lucas-Kanade: brghtness consstenc, small moton, spatal coherence Handle large moton: teratve update + pramd search Fttng and algnment fnd the transformaton parameters that best algn matched ponts Object nstance recognton Kepont-based object nstance recognton and search
72 Next week Perspectve and 3D Geometr
Multi-stable Perception. Necker Cube
 Mult-stable Percepton Necker Cube Spnnng dancer lluson, Nobuuk Kaahara Fttng and Algnment Computer Vson Szelsk 6.1 James Has Acknowledgment: Man sldes from Derek Hoem, Lana Lazebnk, and Grauman&Lebe 2008
Mult-stable Percepton Necker Cube Spnnng dancer lluson, Nobuuk Kaahara Fttng and Algnment Computer Vson Szelsk 6.1 James Has Acknowledgment: Man sldes from Derek Hoem, Lana Lazebnk, and Grauman&Lebe 2008
Fitting and Alignment
 Fttng and Algnment Computer Vson Ja-Bn Huang, Vrgna Tech Many sldes from S. Lazebnk and D. Hoem Admnstratve Stuffs HW 1 Competton: Edge Detecton Submsson lnk HW 2 wll be posted tonght Due Oct 09 (Mon)
Fttng and Algnment Computer Vson Ja-Bn Huang, Vrgna Tech Many sldes from S. Lazebnk and D. Hoem Admnstratve Stuffs HW 1 Competton: Edge Detecton Submsson lnk HW 2 wll be posted tonght Due Oct 09 (Mon)
Image Alignment CSC 767
 Image Algnment CSC 767 Image algnment Image from http://graphcs.cs.cmu.edu/courses/15-463/2010_fall/ Image algnment: Applcatons Panorama sttchng Image algnment: Applcatons Recognton of object nstances
Image Algnment CSC 767 Image algnment Image from http://graphcs.cs.cmu.edu/courses/15-463/2010_fall/ Image algnment: Applcatons Panorama sttchng Image algnment: Applcatons Recognton of object nstances
Fitting & Matching. Lecture 4 Prof. Bregler. Slides from: S. Lazebnik, S. Seitz, M. Pollefeys, A. Effros.
 Fttng & Matchng Lecture 4 Prof. Bregler Sldes from: S. Lazebnk, S. Setz, M. Pollefeys, A. Effros. How do we buld panorama? We need to match (algn) mages Matchng wth Features Detect feature ponts n both
Fttng & Matchng Lecture 4 Prof. Bregler Sldes from: S. Lazebnk, S. Setz, M. Pollefeys, A. Effros. How do we buld panorama? We need to match (algn) mages Matchng wth Features Detect feature ponts n both
Image warping and stitching May 5 th, 2015
 Image warpng and sttchng Ma 5 th, 2015 Yong Jae Lee UC Davs PS2 due net Frda Announcements 2 Last tme Interactve segmentaton Feature-based algnment 2D transformatons Affne ft RANSAC 3 1 Algnment problem
Image warpng and sttchng Ma 5 th, 2015 Yong Jae Lee UC Davs PS2 due net Frda Announcements 2 Last tme Interactve segmentaton Feature-based algnment 2D transformatons Affne ft RANSAC 3 1 Algnment problem
LEAST SQUARES. RANSAC. HOUGH TRANSFORM.
 LEAS SQUARES. RANSAC. HOUGH RANSFORM. he sldes are from several sources through James Has (Brown); Srnvasa Narasmhan (CMU); Slvo Savarese (U. of Mchgan); Bll Freeman and Antono orralba (MI), ncludng ther
LEAS SQUARES. RANSAC. HOUGH RANSFORM. he sldes are from several sources through James Has (Brown); Srnvasa Narasmhan (CMU); Slvo Savarese (U. of Mchgan); Bll Freeman and Antono orralba (MI), ncludng ther
Geometric Transformations and Multiple Views
 CS 2770: Computer Vson Geometrc Transformatons and Multple Vews Prof. Adrana Kovaska Unverst of Pttsburg Februar 8, 208 W multple vews? Structure and dept are nerentl ambguous from sngle vews. Multple
CS 2770: Computer Vson Geometrc Transformatons and Multple Vews Prof. Adrana Kovaska Unverst of Pttsburg Februar 8, 208 W multple vews? Structure and dept are nerentl ambguous from sngle vews. Multple
CS 534: Computer Vision Model Fitting
 CS 534: Computer Vson Model Fttng Sprng 004 Ahmed Elgammal Dept of Computer Scence CS 534 Model Fttng - 1 Outlnes Model fttng s mportant Least-squares fttng Maxmum lkelhood estmaton MAP estmaton Robust
CS 534: Computer Vson Model Fttng Sprng 004 Ahmed Elgammal Dept of Computer Scence CS 534 Model Fttng - 1 Outlnes Model fttng s mportant Least-squares fttng Maxmum lkelhood estmaton MAP estmaton Robust
Structure from Motion
 Structure from Moton Structure from Moton For now, statc scene and movng camera Equvalentl, rgdl movng scene and statc camera Lmtng case of stereo wth man cameras Lmtng case of multvew camera calbraton
Structure from Moton Structure from Moton For now, statc scene and movng camera Equvalentl, rgdl movng scene and statc camera Lmtng case of stereo wth man cameras Lmtng case of multvew camera calbraton
12/2/2009. Announcements. Parametric / Non-parametric. Case-Based Reasoning. Nearest-Neighbor on Images. Nearest-Neighbor Classification
 Introducton to Artfcal Intellgence V22.0472-001 Fall 2009 Lecture 24: Nearest-Neghbors & Support Vector Machnes Rob Fergus Dept of Computer Scence, Courant Insttute, NYU Sldes from Danel Yeung, John DeNero
Introducton to Artfcal Intellgence V22.0472-001 Fall 2009 Lecture 24: Nearest-Neghbors & Support Vector Machnes Rob Fergus Dept of Computer Scence, Courant Insttute, NYU Sldes from Danel Yeung, John DeNero
Outline. Discriminative classifiers for image recognition. Where in the World? A nearest neighbor recognition example 4/14/2011. CS 376 Lecture 22 1
 4/14/011 Outlne Dscrmnatve classfers for mage recognton Wednesday, Aprl 13 Krsten Grauman UT-Austn Last tme: wndow-based generc obect detecton basc ppelne face detecton wth boostng as case study Today:
4/14/011 Outlne Dscrmnatve classfers for mage recognton Wednesday, Aprl 13 Krsten Grauman UT-Austn Last tme: wndow-based generc obect detecton basc ppelne face detecton wth boostng as case study Today:
Range images. Range image registration. Examples of sampling patterns. Range images and range surfaces
 Range mages For many structured lght scanners, the range data forms a hghly regular pattern known as a range mage. he samplng pattern s determned by the specfc scanner. Range mage regstraton 1 Examples
Range mages For many structured lght scanners, the range data forms a hghly regular pattern known as a range mage. he samplng pattern s determned by the specfc scanner. Range mage regstraton 1 Examples
Calibrating a single camera. Odilon Redon, Cyclops, 1914
 Calbratng a sngle camera Odlon Redon, Cclops, 94 Our goal: Recover o 3D structure Recover o structure rom one mage s nherentl ambguous??? Sngle-vew ambgut Sngle-vew ambgut Rashad Alakbarov shadow sculptures
Calbratng a sngle camera Odlon Redon, Cclops, 94 Our goal: Recover o 3D structure Recover o structure rom one mage s nherentl ambguous??? Sngle-vew ambgut Sngle-vew ambgut Rashad Alakbarov shadow sculptures
Lecture 9 Fitting and Matching
 In ths lecture, we re gong to talk about a number of problems related to fttng and matchng. We wll formulate these problems formally and our dscusson wll nvolve Least Squares methods, RANSAC and Hough
In ths lecture, we re gong to talk about a number of problems related to fttng and matchng. We wll formulate these problems formally and our dscusson wll nvolve Least Squares methods, RANSAC and Hough
Prof. Feng Liu. Spring /24/2017
 Prof. Feng Lu Sprng 2017 ttp://www.cs.pd.edu/~flu/courses/cs510/ 05/24/2017 Last me Compostng and Mattng 2 oday Vdeo Stablzaton Vdeo stablzaton ppelne 3 Orson Welles, ouc of Evl, 1958 4 Images courtesy
Prof. Feng Lu Sprng 2017 ttp://www.cs.pd.edu/~flu/courses/cs510/ 05/24/2017 Last me Compostng and Mattng 2 oday Vdeo Stablzaton Vdeo stablzaton ppelne 3 Orson Welles, ouc of Evl, 1958 4 Images courtesy
Active Contours/Snakes
 Actve Contours/Snakes Erkut Erdem Acknowledgement: The sldes are adapted from the sldes prepared by K. Grauman of Unversty of Texas at Austn Fttng: Edges vs. boundares Edges useful sgnal to ndcate occludng
Actve Contours/Snakes Erkut Erdem Acknowledgement: The sldes are adapted from the sldes prepared by K. Grauman of Unversty of Texas at Austn Fttng: Edges vs. boundares Edges useful sgnal to ndcate occludng
SLAM Summer School 2006 Practical 2: SLAM using Monocular Vision
 SLAM Summer School 2006 Practcal 2: SLAM usng Monocular Vson Javer Cvera, Unversty of Zaragoza Andrew J. Davson, Imperal College London J.M.M Montel, Unversty of Zaragoza. josemar@unzar.es, jcvera@unzar.es,
SLAM Summer School 2006 Practcal 2: SLAM usng Monocular Vson Javer Cvera, Unversty of Zaragoza Andrew J. Davson, Imperal College London J.M.M Montel, Unversty of Zaragoza. josemar@unzar.es, jcvera@unzar.es,
Ecient Computation of the Most Probable Motion from Fuzzy. Moshe Ben-Ezra Shmuel Peleg Michael Werman. The Hebrew University of Jerusalem
 Ecent Computaton of the Most Probable Moton from Fuzzy Correspondences Moshe Ben-Ezra Shmuel Peleg Mchael Werman Insttute of Computer Scence The Hebrew Unversty of Jerusalem 91904 Jerusalem, Israel Emal:
Ecent Computaton of the Most Probable Moton from Fuzzy Correspondences Moshe Ben-Ezra Shmuel Peleg Mchael Werman Insttute of Computer Scence The Hebrew Unversty of Jerusalem 91904 Jerusalem, Israel Emal:
Computer Vision Lecture 12
 N pels Course Outlne Computer Vson Lecture 2 Recognton wt Local Features 5226 Bastan Lebe RWH acen ttp://wwwvsonrwt-aacende/ lebe@vsonrwt-aacende Image Processng Bascs Segmentaton & Groupng Object Recognton
N pels Course Outlne Computer Vson Lecture 2 Recognton wt Local Features 5226 Bastan Lebe RWH acen ttp://wwwvsonrwt-aacende/ lebe@vsonrwt-aacende Image Processng Bascs Segmentaton & Groupng Object Recognton
Fitting: Deformable contours April 26 th, 2018
 4/6/08 Fttng: Deformable contours Aprl 6 th, 08 Yong Jae Lee UC Davs Recap so far: Groupng and Fttng Goal: move from array of pxel values (or flter outputs) to a collecton of regons, objects, and shapes.
4/6/08 Fttng: Deformable contours Aprl 6 th, 08 Yong Jae Lee UC Davs Recap so far: Groupng and Fttng Goal: move from array of pxel values (or flter outputs) to a collecton of regons, objects, and shapes.
Photo by Carl Warner
 Photo b Carl Warner Photo b Carl Warner Photo b Carl Warner Fitting and Alignment Szeliski 6. Computer Vision CS 43, Brown James Has Acknowledgment: Man slides from Derek Hoiem and Grauman&Leibe 2008 AAAI
Photo b Carl Warner Photo b Carl Warner Photo b Carl Warner Fitting and Alignment Szeliski 6. Computer Vision CS 43, Brown James Has Acknowledgment: Man slides from Derek Hoiem and Grauman&Leibe 2008 AAAI
Programming in Fortran 90 : 2017/2018
 Programmng n Fortran 90 : 2017/2018 Programmng n Fortran 90 : 2017/2018 Exercse 1 : Evaluaton of functon dependng on nput Wrte a program who evaluate the functon f (x,y) for any two user specfed values
Programmng n Fortran 90 : 2017/2018 Programmng n Fortran 90 : 2017/2018 Exercse 1 : Evaluaton of functon dependng on nput Wrte a program who evaluate the functon f (x,y) for any two user specfed values
Shape Representation Robust to the Sketching Order Using Distance Map and Direction Histogram
 Shape Representaton Robust to the Sketchng Order Usng Dstance Map and Drecton Hstogram Department of Computer Scence Yonse Unversty Kwon Yun CONTENTS Revew Topc Proposed Method System Overvew Sketch Normalzaton
Shape Representaton Robust to the Sketchng Order Usng Dstance Map and Drecton Hstogram Department of Computer Scence Yonse Unversty Kwon Yun CONTENTS Revew Topc Proposed Method System Overvew Sketch Normalzaton
Face Recognition University at Buffalo CSE666 Lecture Slides Resources:
 Face Recognton Unversty at Buffalo CSE666 Lecture Sldes Resources: http://www.face-rec.org/algorthms/ Overvew of face recognton algorthms Correlaton - Pxel based correspondence between two face mages Structural
Face Recognton Unversty at Buffalo CSE666 Lecture Sldes Resources: http://www.face-rec.org/algorthms/ Overvew of face recognton algorthms Correlaton - Pxel based correspondence between two face mages Structural
Radial Basis Functions
 Radal Bass Functons Mesh Reconstructon Input: pont cloud Output: water-tght manfold mesh Explct Connectvty estmaton Implct Sgned dstance functon estmaton Image from: Reconstructon and Representaton of
Radal Bass Functons Mesh Reconstructon Input: pont cloud Output: water-tght manfold mesh Explct Connectvty estmaton Implct Sgned dstance functon estmaton Image from: Reconstructon and Representaton of
Subspace clustering. Clustering. Fundamental to all clustering techniques is the choice of distance measure between data points;
 Subspace clusterng Clusterng Fundamental to all clusterng technques s the choce of dstance measure between data ponts; D q ( ) ( ) 2 x x = x x, j k = 1 k jk Squared Eucldean dstance Assumpton: All features
Subspace clusterng Clusterng Fundamental to all clusterng technques s the choce of dstance measure between data ponts; D q ( ) ( ) 2 x x = x x, j k = 1 k jk Squared Eucldean dstance Assumpton: All features
LECTURE : MANIFOLD LEARNING
 LECTURE : MANIFOLD LEARNING Rta Osadchy Some sldes are due to L.Saul, V. C. Raykar, N. Verma Topcs PCA MDS IsoMap LLE EgenMaps Done! Dmensonalty Reducton Data representaton Inputs are real-valued vectors
LECTURE : MANIFOLD LEARNING Rta Osadchy Some sldes are due to L.Saul, V. C. Raykar, N. Verma Topcs PCA MDS IsoMap LLE EgenMaps Done! Dmensonalty Reducton Data representaton Inputs are real-valued vectors
An efficient method to build panoramic image mosaics
 An effcent method to buld panoramc mage mosacs Pattern Recognton Letters vol. 4 003 Dae-Hyun Km Yong-In Yoon Jong-Soo Cho School of Electrcal Engneerng and Computer Scence Kyungpook Natonal Unv. Abstract
An effcent method to buld panoramc mage mosacs Pattern Recognton Letters vol. 4 003 Dae-Hyun Km Yong-In Yoon Jong-Soo Cho School of Electrcal Engneerng and Computer Scence Kyungpook Natonal Unv. Abstract
Range Data Registration Using Photometric Features
 Range Data Regstraton Usng Photometrc Features Joon Kyu Seo, Gregory C. Sharp, and Sang Wook Lee Dept. of Meda Technology, Sogang Unversty, Seoul, Korea Dept. of Radaton Oncology, Massachusetts General
Range Data Regstraton Usng Photometrc Features Joon Kyu Seo, Gregory C. Sharp, and Sang Wook Lee Dept. of Meda Technology, Sogang Unversty, Seoul, Korea Dept. of Radaton Oncology, Massachusetts General
6.1 2D and 3D feature-based alignment 275. similarity. Euclidean
 6.1 2D and 3D feature-based algnment 275 y translaton smlarty projectve Eucldean affne x Fgure 6.2 Basc set of 2D planar transformatons Once we have extracted features from mages, the next stage n many
6.1 2D and 3D feature-based algnment 275 y translaton smlarty projectve Eucldean affne x Fgure 6.2 Basc set of 2D planar transformatons Once we have extracted features from mages, the next stage n many
Recognizing Faces. Outline
 Recognzng Faces Drk Colbry Outlne Introducton and Motvaton Defnng a feature vector Prncpal Component Analyss Lnear Dscrmnate Analyss !"" #$""% http://www.nfotech.oulu.f/annual/2004 + &'()*) '+)* 2 ! &
Recognzng Faces Drk Colbry Outlne Introducton and Motvaton Defnng a feature vector Prncpal Component Analyss Lnear Dscrmnate Analyss !"" #$""% http://www.nfotech.oulu.f/annual/2004 + &'()*) '+)* 2 ! &
Support Vector Machines
 /9/207 MIST.6060 Busness Intellgence and Data Mnng What are Support Vector Machnes? Support Vector Machnes Support Vector Machnes (SVMs) are supervsed learnng technques that analyze data and recognze patterns.
/9/207 MIST.6060 Busness Intellgence and Data Mnng What are Support Vector Machnes? Support Vector Machnes Support Vector Machnes (SVMs) are supervsed learnng technques that analyze data and recognze patterns.
Fitting: Voting and the Hough Transform
 Fttng: Votng and the Hough Transform Thurs Sept 4 Krsten Grauman UT Austn Last tme What are groupng problems n vson? Inspraton from human percepton Gestalt propertes Bottom-up segmentaton va clusterng
Fttng: Votng and the Hough Transform Thurs Sept 4 Krsten Grauman UT Austn Last tme What are groupng problems n vson? Inspraton from human percepton Gestalt propertes Bottom-up segmentaton va clusterng
What are the camera parameters? Where are the light sources? What is the mapping from radiance to pixel color? Want to solve for 3D geometry
 Today: Calbraton What are the camera parameters? Where are the lght sources? What s the mappng from radance to pel color? Why Calbrate? Want to solve for D geometry Alternatve approach Solve for D shape
Today: Calbraton What are the camera parameters? Where are the lght sources? What s the mappng from radance to pel color? Why Calbrate? Want to solve for D geometry Alternatve approach Solve for D shape
AIMS Computer vision. AIMS Computer Vision. Outline. Outline.
 AIMS Computer Vson 1 Matchng, ndexng, and search 2 Object category detecton 3 Vsual geometry 1/2: Camera models and trangulaton 4 Vsual geometry 2/2: Reconstructon from multple vews AIMS Computer vson
AIMS Computer Vson 1 Matchng, ndexng, and search 2 Object category detecton 3 Vsual geometry 1/2: Camera models and trangulaton 4 Vsual geometry 2/2: Reconstructon from multple vews AIMS Computer vson
Computer Vision I. Xbox Kinnect: Rectification. The Fundamental matrix. Stereo III. CSE252A Lecture 16. Example: forward motion
 Xbox Knnect: Stereo III Depth map http://www.youtube.com/watch?v=7qrnwoo-8a CSE5A Lecture 6 Projected pattern http://www.youtube.com/watch?v=ceep7x-z4wy The Fundamental matrx Rectfcaton The eppolar constrant
Xbox Knnect: Stereo III Depth map http://www.youtube.com/watch?v=7qrnwoo-8a CSE5A Lecture 6 Projected pattern http://www.youtube.com/watch?v=ceep7x-z4wy The Fundamental matrx Rectfcaton The eppolar constrant
A Robust Method for Estimating the Fundamental Matrix
 Proc. VIIth Dgtal Image Computng: Technques and Applcatons, Sun C., Talbot H., Ourseln S. and Adraansen T. (Eds.), 0- Dec. 003, Sydney A Robust Method for Estmatng the Fundamental Matrx C.L. Feng and Y.S.
Proc. VIIth Dgtal Image Computng: Technques and Applcatons, Sun C., Talbot H., Ourseln S. and Adraansen T. (Eds.), 0- Dec. 003, Sydney A Robust Method for Estmatng the Fundamental Matrx C.L. Feng and Y.S.
Computer Animation and Visualisation. Lecture 4. Rigging / Skinning
 Computer Anmaton and Vsualsaton Lecture 4. Rggng / Sknnng Taku Komura Overvew Sknnng / Rggng Background knowledge Lnear Blendng How to decde weghts? Example-based Method Anatomcal models Sknnng Assume
Computer Anmaton and Vsualsaton Lecture 4. Rggng / Sknnng Taku Komura Overvew Sknnng / Rggng Background knowledge Lnear Blendng How to decde weghts? Example-based Method Anatomcal models Sknnng Assume
FEATURE EXTRACTION. Dr. K.Vijayarekha. Associate Dean School of Electrical and Electronics Engineering SASTRA University, Thanjavur
 FEATURE EXTRACTION Dr. K.Vjayarekha Assocate Dean School of Electrcal and Electroncs Engneerng SASTRA Unversty, Thanjavur613 41 Jont Intatve of IITs and IISc Funded by MHRD Page 1 of 8 Table of Contents
FEATURE EXTRACTION Dr. K.Vjayarekha Assocate Dean School of Electrcal and Electroncs Engneerng SASTRA Unversty, Thanjavur613 41 Jont Intatve of IITs and IISc Funded by MHRD Page 1 of 8 Table of Contents
IMAGE MATCHING WITH SIFT FEATURES A PROBABILISTIC APPROACH
 IMAGE MATCHING WITH SIFT FEATURES A PROBABILISTIC APPROACH Jyot Joglekar a, *, Shrsh S. Gedam b a CSRE, IIT Bombay, Doctoral Student, Mumba, Inda jyotj@tb.ac.n b Centre of Studes n Resources Engneerng,
IMAGE MATCHING WITH SIFT FEATURES A PROBABILISTIC APPROACH Jyot Joglekar a, *, Shrsh S. Gedam b a CSRE, IIT Bombay, Doctoral Student, Mumba, Inda jyotj@tb.ac.n b Centre of Studes n Resources Engneerng,
Lecture 4: Principal components
 /3/6 Lecture 4: Prncpal components 3..6 Multvarate lnear regresson MLR s optmal for the estmaton data...but poor for handlng collnear data Covarance matrx s not nvertble (large condton number) Robustness
/3/6 Lecture 4: Prncpal components 3..6 Multvarate lnear regresson MLR s optmal for the estmaton data...but poor for handlng collnear data Covarance matrx s not nvertble (large condton number) Robustness
CS434a/541a: Pattern Recognition Prof. Olga Veksler. Lecture 15
 CS434a/541a: Pattern Recognton Prof. Olga Veksler Lecture 15 Today New Topc: Unsupervsed Learnng Supervsed vs. unsupervsed learnng Unsupervsed learnng Net Tme: parametrc unsupervsed learnng Today: nonparametrc
CS434a/541a: Pattern Recognton Prof. Olga Veksler Lecture 15 Today New Topc: Unsupervsed Learnng Supervsed vs. unsupervsed learnng Unsupervsed learnng Net Tme: parametrc unsupervsed learnng Today: nonparametrc
MULTISPECTRAL IMAGES CLASSIFICATION BASED ON KLT AND ATR AUTOMATIC TARGET RECOGNITION
 MULTISPECTRAL IMAGES CLASSIFICATION BASED ON KLT AND ATR AUTOMATIC TARGET RECOGNITION Paulo Quntlano 1 & Antono Santa-Rosa 1 Federal Polce Department, Brasla, Brazl. E-mals: quntlano.pqs@dpf.gov.br and
MULTISPECTRAL IMAGES CLASSIFICATION BASED ON KLT AND ATR AUTOMATIC TARGET RECOGNITION Paulo Quntlano 1 & Antono Santa-Rosa 1 Federal Polce Department, Brasla, Brazl. E-mals: quntlano.pqs@dpf.gov.br and
A Fast Visual Tracking Algorithm Based on Circle Pixels Matching
 A Fast Vsual Trackng Algorthm Based on Crcle Pxels Matchng Zhqang Hou hou_zhq@sohu.com Chongzhao Han czhan@mal.xjtu.edu.cn Ln Zheng Abstract: A fast vsual trackng algorthm based on crcle pxels matchng
A Fast Vsual Trackng Algorthm Based on Crcle Pxels Matchng Zhqang Hou hou_zhq@sohu.com Chongzhao Han czhan@mal.xjtu.edu.cn Ln Zheng Abstract: A fast vsual trackng algorthm based on crcle pxels matchng
Model Fitting מבוסס על שיעור שנבנה ע"י טל הסנר
 Model Fttng מבוסס על שיעור שנבנה ע"י טל הסנר מקורות מפוזר על פני ספר הלימוד... Fttng: Motvaton We ve learned how to detect edges, corners, blobs. Now what? We would lke to form a hgher-level, more compact
Model Fttng מבוסס על שיעור שנבנה ע"י טל הסנר מקורות מפוזר על פני ספר הלימוד... Fttng: Motvaton We ve learned how to detect edges, corners, blobs. Now what? We would lke to form a hgher-level, more compact
2D Raster Graphics. Integer grid Sequential (left-right, top-down) scan. Computer Graphics
 scan. Computer Graphics") 2D Graphcs 2D Raster Graphcs Integer grd Sequental (left-rght, top-down scan j Lne drawng A ver mportant operaton used frequentl, block dagrams, bar charts, engneerng drawng, archtecture plans, etc. curves
2D Graphcs 2D Raster Graphcs Integer grd Sequental (left-rght, top-down scan j Lne drawng A ver mportant operaton used frequentl, block dagrams, bar charts, engneerng drawng, archtecture plans, etc. curves
MOTION PANORAMA CONSTRUCTION FROM STREAMING VIDEO FOR POWER- CONSTRAINED MOBILE MULTIMEDIA ENVIRONMENTS XUNYU PAN
 MOTION PANORAMA CONSTRUCTION FROM STREAMING VIDEO FOR POWER- CONSTRAINED MOBILE MULTIMEDIA ENVIRONMENTS by XUNYU PAN (Under the Drecton of Suchendra M. Bhandarkar) ABSTRACT In modern tmes, more and more
MOTION PANORAMA CONSTRUCTION FROM STREAMING VIDEO FOR POWER- CONSTRAINED MOBILE MULTIMEDIA ENVIRONMENTS by XUNYU PAN (Under the Drecton of Suchendra M. Bhandarkar) ABSTRACT In modern tmes, more and more
Outline. Self-Organizing Maps (SOM) US Hebbian Learning, Cntd. The learning rule is Hebbian like:
 US Hebbian Learning, Cntd. The learning rule is Hebbian like:") Self-Organzng Maps (SOM) Turgay İBRİKÇİ, PhD. Outlne Introducton Structures of SOM SOM Archtecture Neghborhoods SOM Algorthm Examples Summary 1 2 Unsupervsed Hebban Learnng US Hebban Learnng, Cntd 3 A
Self-Organzng Maps (SOM) Turgay İBRİKÇİ, PhD. Outlne Introducton Structures of SOM SOM Archtecture Neghborhoods SOM Algorthm Examples Summary 1 2 Unsupervsed Hebban Learnng US Hebban Learnng, Cntd 3 A
Lecture #15 Lecture Notes
 Lecture #15 Lecture Notes The ocean water column s very much a 3-D spatal entt and we need to represent that structure n an economcal way to deal wth t n calculatons. We wll dscuss one way to do so, emprcal
Lecture #15 Lecture Notes The ocean water column s very much a 3-D spatal entt and we need to represent that structure n an economcal way to deal wth t n calculatons. We wll dscuss one way to do so, emprcal
A Comparison and Evaluation of Three Different Pose Estimation Algorithms In Detecting Low Texture Manufactured Objects
 Clemson Unversty TgerPrnts All Theses Theses 12-2011 A Comparson and Evaluaton of Three Dfferent Pose Estmaton Algorthms In Detectng Low Texture Manufactured Objects Robert Krener Clemson Unversty, rkrene@clemson.edu
Clemson Unversty TgerPrnts All Theses Theses 12-2011 A Comparson and Evaluaton of Three Dfferent Pose Estmaton Algorthms In Detectng Low Texture Manufactured Objects Robert Krener Clemson Unversty, rkrene@clemson.edu
Feature-based image registration using the shape context
 Feature-based mage regstraton usng the shape context LEI HUANG *, ZHEN LI Center for Earth Observaton and Dgtal Earth, Chnese Academy of Scences, Bejng, 100012, Chna Graduate Unversty of Chnese Academy
Feature-based mage regstraton usng the shape context LEI HUANG *, ZHEN LI Center for Earth Observaton and Dgtal Earth, Chnese Academy of Scences, Bejng, 100012, Chna Graduate Unversty of Chnese Academy
Computer Vision Lecture 14
 N pels Scrpt Computer Vson Lecture 4 Recognton wt Local Features We ve created a scrpt for te part of te lecture on object recognton & categorzaton K. Grauman, Vsual Object Recognton Morgan & Clapool publsers,
N pels Scrpt Computer Vson Lecture 4 Recognton wt Local Features We ve created a scrpt for te part of te lecture on object recognton & categorzaton K. Grauman, Vsual Object Recognton Morgan & Clapool publsers,
Takahiro ISHIKAWA Takahiro Ishikawa Takahiro Ishikawa Takeo KANADE
 Takahro ISHIKAWA Takahro Ishkawa Takahro Ishkawa Takeo KANADE Monocular gaze estmaton s usually performed by locatng the pupls, and the nner and outer eye corners n the mage of the drver s head. Of these
Takahro ISHIKAWA Takahro Ishkawa Takahro Ishkawa Takeo KANADE Monocular gaze estmaton s usually performed by locatng the pupls, and the nner and outer eye corners n the mage of the drver s head. Of these
Exercises (Part 4) Introduction to R UCLA/CCPR. John Fox, February 2005
 Introduction to R UCLA/CCPR. John Fox, February 2005") Exercses (Part 4) Introducton to R UCLA/CCPR John Fox, February 2005 1. A challengng problem: Iterated weghted least squares (IWLS) s a standard method of fttng generalzed lnear models to data. As descrbed
Exercses (Part 4) Introducton to R UCLA/CCPR John Fox, February 2005 1. A challengng problem: Iterated weghted least squares (IWLS) s a standard method of fttng generalzed lnear models to data. As descrbed
Improvement of Spatial Resolution Using BlockMatching Based Motion Estimation and Frame. Integration
 Improvement of Spatal Resoluton Usng BlockMatchng Based Moton Estmaton and Frame Integraton Danya Suga and Takayuk Hamamoto Graduate School of Engneerng, Tokyo Unversty of Scence, 6-3-1, Nuku, Katsuska-ku,
Improvement of Spatal Resoluton Usng BlockMatchng Based Moton Estmaton and Frame Integraton Danya Suga and Takayuk Hamamoto Graduate School of Engneerng, Tokyo Unversty of Scence, 6-3-1, Nuku, Katsuska-ku,
Angle-Independent 3D Reconstruction. Ji Zhang Mireille Boutin Daniel Aliaga
 Angle-Independent 3D Reconstructon J Zhang Mrelle Boutn Danel Alaga Goal: Structure from Moton To reconstruct the 3D geometry of a scene from a set of pctures (e.g. a move of the scene pont reconstructon
Angle-Independent 3D Reconstructon J Zhang Mrelle Boutn Danel Alaga Goal: Structure from Moton To reconstruct the 3D geometry of a scene from a set of pctures (e.g. a move of the scene pont reconstructon
Two Dimensional Projective Point Matching
 Two Dmensonal Projectve Pont Matchng Jason Denton & J. Ross Beverdge Colorado State Unversty Computer Scence Department Ft. Collns, CO 80523 denton@cs.colostate.edu Abstract Pont matchng s the task of
Two Dmensonal Projectve Pont Matchng Jason Denton & J. Ross Beverdge Colorado State Unversty Computer Scence Department Ft. Collns, CO 80523 denton@cs.colostate.edu Abstract Pont matchng s the task of
6.854 Advanced Algorithms Petar Maymounkov Problem Set 11 (November 23, 2005) With: Benjamin Rossman, Oren Weimann, and Pouya Kheradpour
 With: Benjamin Rossman, Oren Weimann, and Pouya Kheradpour") 6.854 Advanced Algorthms Petar Maymounkov Problem Set 11 (November 23, 2005) Wth: Benjamn Rossman, Oren Wemann, and Pouya Kheradpour Problem 1. We reduce vertex cover to MAX-SAT wth weghts, such that the
6.854 Advanced Algorthms Petar Maymounkov Problem Set 11 (November 23, 2005) Wth: Benjamn Rossman, Oren Wemann, and Pouya Kheradpour Problem 1. We reduce vertex cover to MAX-SAT wth weghts, such that the
Improved SIFT-Features Matching for Object Recognition
 Improved SIFT-Features Matchng for Obect Recognton Fara Alhwarn, Chao Wang, Danela Rstć-Durrant, Axel Gräser Insttute of Automaton, Unversty of Bremen, FB / NW Otto-Hahn-Allee D-8359 Bremen Emals: {alhwarn,wang,rstc,ag}@at.un-bremen.de
Improved SIFT-Features Matchng for Obect Recognton Fara Alhwarn, Chao Wang, Danela Rstć-Durrant, Axel Gräser Insttute of Automaton, Unversty of Bremen, FB / NW Otto-Hahn-Allee D-8359 Bremen Emals: {alhwarn,wang,rstc,ag}@at.un-bremen.de
A NEW IMPLEMENTATION OF THE ICP ALGORITHM FOR 3D SURFACE REGISTRATION USING A COMPREHENSIVE LOOK UP MATRIX
 A NEW IMPLEMENTATION OF THE ICP ALGORITHM FOR 3D SURFACE REGISTRATION USING A COMPREHENSIVE LOOK UP MATRIX A. Almhde, C. Léger, M. Derche 2 and R. Lédée Laboratory of Electroncs, Sgnals and Images (LESI),
A NEW IMPLEMENTATION OF THE ICP ALGORITHM FOR 3D SURFACE REGISTRATION USING A COMPREHENSIVE LOOK UP MATRIX A. Almhde, C. Léger, M. Derche 2 and R. Lédée Laboratory of Electroncs, Sgnals and Images (LESI),
SIMULTANEOUS REGISTRATION OF MULTIPLE VIEWS OF A 3D OBJECT
 SIMULTANEOUS REGISTRATION OF MULTIPLE VIEWS OF A 3D OBJECT Helmut Pottmann a, Stefan Leopoldseder a, Mchael Hofer a a Insttute of Geometry, Venna Unversty of Technology, Wedner Hauptstr. 8 10, A 1040 Wen,
SIMULTANEOUS REGISTRATION OF MULTIPLE VIEWS OF A 3D OBJECT Helmut Pottmann a, Stefan Leopoldseder a, Mchael Hofer a a Insttute of Geometry, Venna Unversty of Technology, Wedner Hauptstr. 8 10, A 1040 Wen,
Machine Learning. Topic 6: Clustering
 Machne Learnng Topc 6: lusterng lusterng Groupng data nto (hopefully useful) sets. Thngs on the left Thngs on the rght Applcatons of lusterng Hypothess Generaton lusters mght suggest natural groups. Hypothess
Machne Learnng Topc 6: lusterng lusterng Groupng data nto (hopefully useful) sets. Thngs on the left Thngs on the rght Applcatons of lusterng Hypothess Generaton lusters mght suggest natural groups. Hypothess
Discriminative classifiers for object classification. Last time
 Dscrmnatve classfers for object classfcaton Thursday, Nov 12 Krsten Grauman UT Austn Last tme Supervsed classfcaton Loss and rsk, kbayes rule Skn color detecton example Sldng ndo detecton Classfers, boostng
Dscrmnatve classfers for object classfcaton Thursday, Nov 12 Krsten Grauman UT Austn Last tme Supervsed classfcaton Loss and rsk, kbayes rule Skn color detecton example Sldng ndo detecton Classfers, boostng
Lecture 5: Multilayer Perceptrons
 Lecture 5: Multlayer Perceptrons Roger Grosse 1 Introducton So far, we ve only talked about lnear models: lnear regresson and lnear bnary classfers. We noted that there are functons that can t be represented
Lecture 5: Multlayer Perceptrons Roger Grosse 1 Introducton So far, we ve only talked about lnear models: lnear regresson and lnear bnary classfers. We noted that there are functons that can t be represented
New Extensions of the 3-Simplex for Exterior Orientation
 New Extensons of the 3-Smplex for Exteror Orentaton John M. Stenbs Tyrone L. Vncent Wllam A. Hoff Colorado School of Mnes jstenbs@gmal.com tvncent@mnes.edu whoff@mnes.edu Abstract Object pose may be determned
New Extensons of the 3-Smplex for Exteror Orentaton John M. Stenbs Tyrone L. Vncent Wllam A. Hoff Colorado School of Mnes jstenbs@gmal.com tvncent@mnes.edu whoff@mnes.edu Abstract Object pose may be determned
3D Modeling Using Multi-View Images. Jinjin Li. A Thesis Presented in Partial Fulfillment of the Requirements for the Degree Master of Science
 3D Modelng Usng Mult-Vew Images by Jnjn L A Thess Presented n Partal Fulfllment of the Requrements for the Degree Master of Scence Approved August by the Graduate Supervsory Commttee: Lna J. Karam, Char
3D Modelng Usng Mult-Vew Images by Jnjn L A Thess Presented n Partal Fulfllment of the Requrements for the Degree Master of Scence Approved August by the Graduate Supervsory Commttee: Lna J. Karam, Char
CS 231A Computer Vision Midterm
 CS 231A Computer Vson Mdterm Tuesday October 30, 2012 Set 1 Multple Choce (20 ponts) Each queston s worth 2 ponts. To dscourage random guessng, 1 pont wll be deducted for a wrong answer on multple choce
CS 231A Computer Vson Mdterm Tuesday October 30, 2012 Set 1 Multple Choce (20 ponts) Each queston s worth 2 ponts. To dscourage random guessng, 1 pont wll be deducted for a wrong answer on multple choce
CS 231A Computer Vision Midterm
 CS 231A Computer Vson Mdterm Tuesday October 30, 2012 Set 1 Multple Choce (22 ponts) Each queston s worth 2 ponts. To dscourage random guessng, 1 pont wll be deducted for a wrong answer on multple choce
CS 231A Computer Vson Mdterm Tuesday October 30, 2012 Set 1 Multple Choce (22 ponts) Each queston s worth 2 ponts. To dscourage random guessng, 1 pont wll be deducted for a wrong answer on multple choce
Outline. Type of Machine Learning. Examples of Application. Unsupervised Learning
 Outlne Artfcal Intellgence and ts applcatons Lecture 8 Unsupervsed Learnng Professor Danel Yeung danyeung@eee.org Dr. Patrck Chan patrckchan@eee.org South Chna Unversty of Technology, Chna Introducton
Outlne Artfcal Intellgence and ts applcatons Lecture 8 Unsupervsed Learnng Professor Danel Yeung danyeung@eee.org Dr. Patrck Chan patrckchan@eee.org South Chna Unversty of Technology, Chna Introducton
METRIC ALIGNMENT OF LASER RANGE SCANS AND CALIBRATED IMAGES USING LINEAR STRUCTURES
 METRIC ALIGNMENT OF LASER RANGE SCANS AND CALIBRATED IMAGES USING LINEAR STRUCTURES Lorenzo Sorg CIRA the Italan Aerospace Research Centre Computer Vson and Vrtual Realty Lab. Outlne Work goal Work motvaton
METRIC ALIGNMENT OF LASER RANGE SCANS AND CALIBRATED IMAGES USING LINEAR STRUCTURES Lorenzo Sorg CIRA the Italan Aerospace Research Centre Computer Vson and Vrtual Realty Lab. Outlne Work goal Work motvaton
MOTION BLUR ESTIMATION AT CORNERS
 Gacomo Boracch and Vncenzo Caglot Dpartmento d Elettronca e Informazone, Poltecnco d Mlano, Va Ponzo, 34/5-20133 MILANO boracch@elet.polm.t, caglot@elet.polm.t Keywords: Abstract: Pont Spread Functon Parameter
Gacomo Boracch and Vncenzo Caglot Dpartmento d Elettronca e Informazone, Poltecnco d Mlano, Va Ponzo, 34/5-20133 MILANO boracch@elet.polm.t, caglot@elet.polm.t Keywords: Abstract: Pont Spread Functon Parameter
Learning Ensemble of Local PDM-based Regressions. Yen Le Computational Biomedicine Lab Advisor: Prof. Ioannis A. Kakadiaris
 Learnng Ensemble of Local PDM-based Regressons Yen Le Computatonal Bomedcne Lab Advsor: Prof. Ioanns A. Kakadars 1 Problem statement Fttng a statstcal shape model (PDM) for mage segmentaton Callosum segmentaton
Learnng Ensemble of Local PDM-based Regressons Yen Le Computatonal Bomedcne Lab Advsor: Prof. Ioanns A. Kakadars 1 Problem statement Fttng a statstcal shape model (PDM) for mage segmentaton Callosum segmentaton
Polyhedral Compilation Foundations
 Polyhedral Complaton Foundatons Lous-Noël Pouchet pouchet@cse.oho-state.edu Dept. of Computer Scence and Engneerng, the Oho State Unversty Feb 8, 200 888., Class # Introducton: Polyhedral Complaton Foundatons
Polyhedral Complaton Foundatons Lous-Noël Pouchet pouchet@cse.oho-state.edu Dept. of Computer Scence and Engneerng, the Oho State Unversty Feb 8, 200 888., Class # Introducton: Polyhedral Complaton Foundatons
Unsupervised Learning
 Pattern Recognton Lecture 8 Outlne Introducton Unsupervsed Learnng Parametrc VS Non-Parametrc Approach Mxture of Denstes Maxmum-Lkelhood Estmates Clusterng Prof. Danel Yeung School of Computer Scence and
Pattern Recognton Lecture 8 Outlne Introducton Unsupervsed Learnng Parametrc VS Non-Parametrc Approach Mxture of Denstes Maxmum-Lkelhood Estmates Clusterng Prof. Danel Yeung School of Computer Scence and
Multi-view 3D Position Estimation of Sports Players
 Mult-vew 3D Poston Estmaton of Sports Players Robbe Vos and Wlle Brnk Appled Mathematcs Department of Mathematcal Scences Unversty of Stellenbosch, South Afrca Emal: vosrobbe@gmal.com Abstract The problem
Mult-vew 3D Poston Estmaton of Sports Players Robbe Vos and Wlle Brnk Appled Mathematcs Department of Mathematcal Scences Unversty of Stellenbosch, South Afrca Emal: vosrobbe@gmal.com Abstract The problem
Machine Learning 9. week
 Machne Learnng 9. week Mappng Concept Radal Bass Functons (RBF) RBF Networks 1 Mappng It s probably the best scenaro for the classfcaton of two dataset s to separate them lnearly. As you see n the below
Machne Learnng 9. week Mappng Concept Radal Bass Functons (RBF) RBF Networks 1 Mappng It s probably the best scenaro for the classfcaton of two dataset s to separate them lnearly. As you see n the below
K-means and Hierarchical Clustering
 Note to other teachers and users of these sldes. Andrew would be delghted f you found ths source materal useful n gvng your own lectures. Feel free to use these sldes verbatm, or to modfy them to ft your
Note to other teachers and users of these sldes. Andrew would be delghted f you found ths source materal useful n gvng your own lectures. Feel free to use these sldes verbatm, or to modfy them to ft your
Hermite Splines in Lie Groups as Products of Geodesics
 Hermte Splnes n Le Groups as Products of Geodescs Ethan Eade Updated May 28, 2017 1 Introducton 1.1 Goal Ths document defnes a curve n the Le group G parametrzed by tme and by structural parameters n the
Hermte Splnes n Le Groups as Products of Geodescs Ethan Eade Updated May 28, 2017 1 Introducton 1.1 Goal Ths document defnes a curve n the Le group G parametrzed by tme and by structural parameters n the
AUTOMATIC IMAGE REGISTRATION OF MULTI-ANGLE IMAGERY FOR CHRIS/PROBA
 AUTOMATIC IMAGE REGISTRATION OF MULTI-ANGLE IMAGERY FOR CHRIS/PROBA J. Ma *, J.C.-W. Chan, F. Canters Cartography and GIS Research Group, Department of Geography, Vrje Unverstet Brussel, Plenlaan, 050
AUTOMATIC IMAGE REGISTRATION OF MULTI-ANGLE IMAGERY FOR CHRIS/PROBA J. Ma *, J.C.-W. Chan, F. Canters Cartography and GIS Research Group, Department of Geography, Vrje Unverstet Brussel, Plenlaan, 050
3D vector computer graphics
 3D vector computer graphcs Paolo Varagnolo: freelance engneer Padova Aprl 2016 Prvate Practce ----------------------------------- 1. Introducton Vector 3D model representaton n computer graphcs requres
3D vector computer graphcs Paolo Varagnolo: freelance engneer Padova Aprl 2016 Prvate Practce ----------------------------------- 1. Introducton Vector 3D model representaton n computer graphcs requres
Unsupervised Learning and Clustering
 Unsupervsed Learnng and Clusterng Why consder unlabeled samples?. Collectng and labelng large set of samples s costly Gettng recorded speech s free, labelng s tme consumng 2. Classfer could be desgned
Unsupervsed Learnng and Clusterng Why consder unlabeled samples?. Collectng and labelng large set of samples s costly Gettng recorded speech s free, labelng s tme consumng 2. Classfer could be desgned
Line-based Camera Movement Estimation by Using Parallel Lines in Omnidirectional Video
 01 IEEE Internatonal Conference on Robotcs and Automaton RverCentre, Sant Paul, Mnnesota, USA May 14-18, 01 Lne-based Camera Movement Estmaton by Usng Parallel Lnes n Omndrectonal Vdeo Ryosuke kawansh,
01 IEEE Internatonal Conference on Robotcs and Automaton RverCentre, Sant Paul, Mnnesota, USA May 14-18, 01 Lne-based Camera Movement Estmaton by Usng Parallel Lnes n Omndrectonal Vdeo Ryosuke kawansh,
Corner-Based Image Alignment using Pyramid Structure with Gradient Vector Similarity
 Journal of Sgnal and Informaton Processng, 013, 4, 114-119 do:10.436/jsp.013.43b00 Publshed Onlne August 013 (http://www.scrp.org/journal/jsp) Corner-Based Image Algnment usng Pyramd Structure wth Gradent
Journal of Sgnal and Informaton Processng, 013, 4, 114-119 do:10.436/jsp.013.43b00 Publshed Onlne August 013 (http://www.scrp.org/journal/jsp) Corner-Based Image Algnment usng Pyramd Structure wth Gradent
Image Representation & Visualization Basic Imaging Algorithms Shape Representation and Analysis. outline
 mage Vsualzaton mage Vsualzaton mage Representaton & Vsualzaton Basc magng Algorthms Shape Representaton and Analyss outlne mage Representaton & Vsualzaton Basc magng Algorthms Shape Representaton and
mage Vsualzaton mage Vsualzaton mage Representaton & Vsualzaton Basc magng Algorthms Shape Representaton and Analyss outlne mage Representaton & Vsualzaton Basc magng Algorthms Shape Representaton and
Biostatistics 615/815
 The E-M Algorthm Bostatstcs 615/815 Lecture 17 Last Lecture: The Smplex Method General method for optmzaton Makes few assumptons about functon Crawls towards mnmum Some recommendatons Multple startng ponts
The E-M Algorthm Bostatstcs 615/815 Lecture 17 Last Lecture: The Smplex Method General method for optmzaton Makes few assumptons about functon Crawls towards mnmum Some recommendatons Multple startng ponts
Detection of an Object by using Principal Component Analysis
 Detecton of an Object by usng Prncpal Component Analyss 1. G. Nagaven, 2. Dr. T. Sreenvasulu Reddy 1. M.Tech, Department of EEE, SVUCE, Trupath, Inda. 2. Assoc. Professor, Department of ECE, SVUCE, Trupath,
Detecton of an Object by usng Prncpal Component Analyss 1. G. Nagaven, 2. Dr. T. Sreenvasulu Reddy 1. M.Tech, Department of EEE, SVUCE, Trupath, Inda. 2. Assoc. Professor, Department of ECE, SVUCE, Trupath,
TN348: Openlab Module - Colocalization
 TN348: Openlab Module - Colocalzaton Topc The Colocalzaton module provdes the faclty to vsualze and quantfy colocalzaton between pars of mages. The Colocalzaton wndow contans a prevew of the two mages
TN348: Openlab Module - Colocalzaton Topc The Colocalzaton module provdes the faclty to vsualze and quantfy colocalzaton between pars of mages. The Colocalzaton wndow contans a prevew of the two mages
The Codesign Challenge
 ECE 4530 Codesgn Challenge Fall 2007 Hardware/Software Codesgn The Codesgn Challenge Objectves In the codesgn challenge, your task s to accelerate a gven software reference mplementaton as fast as possble.
ECE 4530 Codesgn Challenge Fall 2007 Hardware/Software Codesgn The Codesgn Challenge Objectves In the codesgn challenge, your task s to accelerate a gven software reference mplementaton as fast as possble.
Video Object Tracking Based On Extended Active Shape Models With Color Information
 CGIV'2002: he Frst Frst European Conference Colour on Colour n Graphcs, Imagng, and Vson Vdeo Object rackng Based On Extended Actve Shape Models Wth Color Informaton A. Koschan, S.K. Kang, J.K. Pak, B.
CGIV'2002: he Frst Frst European Conference Colour on Colour n Graphcs, Imagng, and Vson Vdeo Object rackng Based On Extended Actve Shape Models Wth Color Informaton A. Koschan, S.K. Kang, J.K. Pak, B.
Correspondence-free Synchronization and Reconstruction in a Non-rigid Scene
 Correspondence-free Synchronzaton and Reconstructon n a Non-rgd Scene Lor Wolf and Assaf Zomet School of Computer Scence and Engneerng, The Hebrew Unversty, Jerusalem 91904, Israel e-mal: {lwolf,zomet}@cs.huj.ac.l
Correspondence-free Synchronzaton and Reconstructon n a Non-rgd Scene Lor Wolf and Assaf Zomet School of Computer Scence and Engneerng, The Hebrew Unversty, Jerusalem 91904, Israel e-mal: {lwolf,zomet}@cs.huj.ac.l
SIGGRAPH Interactive Image Cutout. Interactive Graph Cut. Interactive Graph Cut. Interactive Graph Cut. Hard Constraints. Lazy Snapping.
 SIGGRAPH 004 Interactve Image Cutout Lazy Snappng Yn L Jan Sun Ch-Keung Tang Heung-Yeung Shum Mcrosoft Research Asa Hong Kong Unversty Separate an object from ts background Compose the object on another
SIGGRAPH 004 Interactve Image Cutout Lazy Snappng Yn L Jan Sun Ch-Keung Tang Heung-Yeung Shum Mcrosoft Research Asa Hong Kong Unversty Separate an object from ts background Compose the object on another
Recovering Camera Pose from Omni-directional Images
 Recoveg Camera Pose from Omn-drectonal Images Ada S.K. WAN 1 Angus M.K. SIU 1 Rynson W.H. LAU 1,2 1 Department of Computer Scence, Cty Unversty of Hong Kong, Hong Kong 2 Department of CEIT, Cty Unversty
Recoveg Camera Pose from Omn-drectonal Images Ada S.K. WAN 1 Angus M.K. SIU 1 Rynson W.H. LAU 1,2 1 Department of Computer Scence, Cty Unversty of Hong Kong, Hong Kong 2 Department of CEIT, Cty Unversty
S1 Note. Basis functions.
 S1 Note. Bass functons. Contents Types of bass functons...1 The Fourer bass...2 B-splne bass...3 Power and type I error rates wth dfferent numbers of bass functons...4 Table S1. Smulaton results of type
S1 Note. Bass functons. Contents Types of bass functons...1 The Fourer bass...2 B-splne bass...3 Power and type I error rates wth dfferent numbers of bass functons...4 Table S1. Smulaton results of type
Feature Matching and Robust Fitting
 Feature Matching and Robust Fitting Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Project 2 questions? This
Feature Matching and Robust Fitting Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Project 2 questions? This
Categorizing objects: of appearance
 Categorzng objects: global and part-based models of appearance UT Austn Generc categorzaton problem 1 Challenges: robustness Realstc scenes are crowded, cluttered, have overlappng objects. Generc category
Categorzng objects: global and part-based models of appearance UT Austn Generc categorzaton problem 1 Challenges: robustness Realstc scenes are crowded, cluttered, have overlappng objects. Generc category
Feature-Area Optimization: A Novel SAR Image Registration Method
 Feature-Area Optmzaton: A Novel SAR Image Regstraton Method Fuqang Lu, Fukun B, Lang Chen, Hao Sh and We Lu Abstract Ths letter proposes a synthetc aperture radar (SAR) mage regstraton method named Feature-Area
Feature-Area Optmzaton: A Novel SAR Image Regstraton Method Fuqang Lu, Fukun B, Lang Chen, Hao Sh and We Lu Abstract Ths letter proposes a synthetc aperture radar (SAR) mage regstraton method named Feature-Area
Outline. Seamless Image Stitching in the Gradient Domain. Related Approaches. Image Stitching. Introduction Related Work
 Outlne Seamless Image Sttchng n the Gradent Doman Anat Levn, Assaf Zomet, Shmuel Peleg and Yar Wess ECCV 004 Presenter: Pn Wu Oct 007 Introducton Related Work GIST: Gradent-doman Image Sttchng GIST GIST
Outlne Seamless Image Sttchng n the Gradent Doman Anat Levn, Assaf Zomet, Shmuel Peleg and Yar Wess ECCV 004 Presenter: Pn Wu Oct 007 Introducton Related Work GIST: Gradent-doman Image Sttchng GIST GIST
Feature Reduction and Selection
 Feature Reducton and Selecton Dr. Shuang LIANG School of Software Engneerng TongJ Unversty Fall, 2012 Today s Topcs Introducton Problems of Dmensonalty Feature Reducton Statstc methods Prncpal Components
Feature Reducton and Selecton Dr. Shuang LIANG School of Software Engneerng TongJ Unversty Fall, 2012 Today s Topcs Introducton Problems of Dmensonalty Feature Reducton Statstc methods Prncpal Components
Machine Learning: Algorithms and Applications
 14/05/1 Machne Learnng: Algorthms and Applcatons Florano Zn Free Unversty of Bozen-Bolzano Faculty of Computer Scence Academc Year 011-01 Lecture 10: 14 May 01 Unsupervsed Learnng cont Sldes courtesy of
14/05/1 Machne Learnng: Algorthms and Applcatons Florano Zn Free Unversty of Bozen-Bolzano Faculty of Computer Scence Academc Year 011-01 Lecture 10: 14 May 01 Unsupervsed Learnng cont Sldes courtesy of
CMPS 10 Introduction to Computer Science Lecture Notes
 CPS 0 Introducton to Computer Scence Lecture Notes Chapter : Algorthm Desgn How should we present algorthms? Natural languages lke Englsh, Spansh, or French whch are rch n nterpretaton and meanng are not
CPS 0 Introducton to Computer Scence Lecture Notes Chapter : Algorthm Desgn How should we present algorthms? Natural languages lke Englsh, Spansh, or French whch are rch n nterpretaton and meanng are not