Using Particle Image Velocimetry for Road Vehicle Tracking and Performance Monitoring. Samuel C. Kucera Jeremy S. Daily
|
|
|
- Clifton Richard
- 5 years ago
- Views:
Transcription

1 Using Particle Image Velocimetry for Road Vehicle Tracking and Performance Monitoring Samuel C. Kucera Jeremy S. Daily SAE World Congress Detroit, MI April 13, 2011 Outline Purpose Mathematics Mathematical Basis for Digital Particle Image Velocimetry Description of Planar Vehicle Kinematics Experimental Procedures Experimental Results Conclusions 1

2 Create a low-cost and reliable measurement system to determine planar kinematic motion of road vehicles using a consumer grade high speed camera. Introduction Purpose QuickTime and a YUV420 codec decompressor are needed to see this picture. 3 Why we need something Why better/different? we need something What s the best way to measure the performance of a U-turn? GPS works (e.g. VBOX) Expensive at high resolution IMU works (e.g. VC4000) Drift from integration of accelerometer signal when determining velocity and position External stationary tracking systems 4 2
3 5 Digital Image Analysis Techniques Two fields: Digital image correlation (DIC) (Sutton, et al., 1986) PIV/DPIV (Willert, 1991) DIC has been around longer (Bailey, 1976) Many techniques for avoiding error are developed in DIC DPIV more open (Fincham, 1997) Less commercialized than DIC 6 3


 Asphalt")
4 Introduction Background of DPIV Digital particle image velocimetry Analyzes digital images to ascertain displacement Knowing the time duration between images allows the determination of velocity 7 Introduction Background (Application of DPIV) Asphalt Ground provides a random pattern High speed videography provides images Snow 8 4




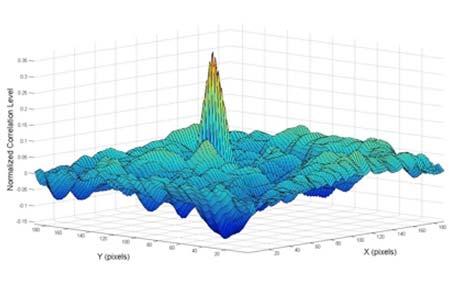
5 Analytical Development Mathematical Basis for DPIV Description of Vehicle Kinematics 9 Mathematical Basis for DPIV The Cross-Correlation Peak shifts the number of displaced pixels (m, M N M N Determine these values 10 5




6 Mathematical Basis for DPIV (cont.) The displacement of the camera has been determined. How does that relate to the motion of the vehicle itself? Pixels Pixels 11 Vehicle Velocity from DPIV DPIV Known Geometry/ Triangulation Calibration 12 6
 Setting the reference point (RP) to the lower left corner simplifies the algorithm for keeping track of the velocity vector components.")
7 Vehicle Kinematics Assume planar motions only Origin of reference frame set at lower-left corner of initial image 13 Vehicle Kinematics (cont.) Setting the reference point (RP) to the lower left corner simplifies the algorithm for keeping track of the velocity vector components. Least Squares Analysis Triangulation referencing tires Triangulate reference point 14 7
8 Vehicle Kinematics (cont.) Observed from DPIV Geometrically Driven 15 Unknown Kinematics Residuals Vehicle Kinematics The Pseudo-Inverse This equation implements the pseudo-inverse to solve the previous system of equations in a least-squares sense. Since the DPIV cross-correlation algorithm contains no means of directly detecting angular velocity, this method provides a measure of angular velocity, assuming a good fit. 16 8




9 Experimental Procedures Apparatus 17 Experimental Procedures Data acquisition Data is acquired as a video of the ground Video is converted into an image sequence 18 9


10 Experimental Procedures Data Processing 19 Signal-to-noise filtering 20 10


11 Performance Study S/N # Failures % Displacement 21 Maximum Velocity for DPIV 22 11
12 Data Analysis Initial filtering in DPIV software Only looks at signal-to-noise ratio Post-processing residual analysis 23 Data Analysis How well do the data fit the kinematic model? Beta values are known from the least squares technique Calculate residuals Filtering is based upon the coefficient of determination
13 Example of Data Fit Quality In-Plane Motion High R 2 Out-of-Plane Motion Low R 2 Experimental Results 26 13
 VC400 0 (GPS) Radar Acceleration (g) 0.181 0.184 0.183 0.")

14 Analysis of Preceding Experimental Results DPIV VC4000 (Accel.) VC400 0 (GPS) Radar Acceleration (g) Deceleration (g) % difference 27 Experimental Results Low speed with VBOX Shadowed region 28 14
15 Conclusions DPIV with a consumer camera works for collecting information about vehicle kinematics Low speed tests with VBOX look promising Large uncertainty at high speeds Better camera should help Technique is sensitive to jostling and shadows 29 Acknowledgments Thesis Committee: Dr. Jeremy Daily, Dr. Scott Holmstrom, and Dr. Michael Keller Funding sources: Wilfred Woobank Graduate Assistantship NSF Disclaimer: References to brands are not intended to be endorsements or commercialization
16 Questions? 31 16
Colorado School of Mines. Computer Vision. Professor William Hoff Dept of Electrical Engineering &Computer Science.
 Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Bundle Adjustment 2 Example Application A vehicle needs to map its environment that it is moving
Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Bundle Adjustment 2 Example Application A vehicle needs to map its environment that it is moving
Particle Image Velocimetry Part - 3
 AerE 545X class notes #5 Particle Image Velocimetry Part - 3 Hui Hu Department of Aerospace Engineering, Iowa State University Ames, Iowa 50011, U.S.A PIV System Setup Particle tracers: Illumination system:
AerE 545X class notes #5 Particle Image Velocimetry Part - 3 Hui Hu Department of Aerospace Engineering, Iowa State University Ames, Iowa 50011, U.S.A PIV System Setup Particle tracers: Illumination system:
Exterior Orientation Parameters
 Exterior Orientation Parameters PERS 12/2001 pp 1321-1332 Karsten Jacobsen, Institute for Photogrammetry and GeoInformation, University of Hannover, Germany The georeference of any photogrammetric product
Exterior Orientation Parameters PERS 12/2001 pp 1321-1332 Karsten Jacobsen, Institute for Photogrammetry and GeoInformation, University of Hannover, Germany The georeference of any photogrammetric product
Vehicle Localization. Hannah Rae Kerner 21 April 2015
 Vehicle Localization Hannah Rae Kerner 21 April 2015 Spotted in Mtn View: Google Car Why precision localization? in order for a robot to follow a road, it needs to know where the road is to stay in a particular
Vehicle Localization Hannah Rae Kerner 21 April 2015 Spotted in Mtn View: Google Car Why precision localization? in order for a robot to follow a road, it needs to know where the road is to stay in a particular
IPTM Special Problems 2013 Crash Test Data. IPTM's Special Problems
 IPTM Special Problems 2013 Crash Test Data IPTM's Special Problems 2013 http://tucrrc.utulsa.edu 1 Introduction and Overview Jeremy Daily, Ph.D., P.E. Associate Professor of Mechanical Engineering Director
IPTM Special Problems 2013 Crash Test Data IPTM's Special Problems 2013 http://tucrrc.utulsa.edu 1 Introduction and Overview Jeremy Daily, Ph.D., P.E. Associate Professor of Mechanical Engineering Director
Video Mosaics for Virtual Environments, R. Szeliski. Review by: Christopher Rasmussen
 Video Mosaics for Virtual Environments, R. Szeliski Review by: Christopher Rasmussen September 19, 2002 Announcements Homework due by midnight Next homework will be assigned Tuesday, due following Tuesday.
Video Mosaics for Virtual Environments, R. Szeliski Review by: Christopher Rasmussen September 19, 2002 Announcements Homework due by midnight Next homework will be assigned Tuesday, due following Tuesday.
Exam in DD2426 Robotics and Autonomous Systems
 Exam in DD2426 Robotics and Autonomous Systems Lecturer: Patric Jensfelt KTH, March 16, 2010, 9-12 No aids are allowed on the exam, i.e. no notes, no books, no calculators, etc. You need a minimum of 20
Exam in DD2426 Robotics and Autonomous Systems Lecturer: Patric Jensfelt KTH, March 16, 2010, 9-12 No aids are allowed on the exam, i.e. no notes, no books, no calculators, etc. You need a minimum of 20
Indoor navigation using smartphones. Chris Hide IESSG, University of Nottingham, UK
 Indoor navigation using smartphones Chris Hide IESSG, University of Nottingham, UK Overview Smartphones Available sensors Current positioning methods Positioning research at IESSG 1. Wi-Fi fingerprinting
Indoor navigation using smartphones Chris Hide IESSG, University of Nottingham, UK Overview Smartphones Available sensors Current positioning methods Positioning research at IESSG 1. Wi-Fi fingerprinting
ENG 7854 / 9804 Industrial Machine Vision. Midterm Exam March 1, 2010.
 ENG 7854 / 9804 Industrial Machine Vision Midterm Exam March 1, 2010. Instructions: a) The duration of this exam is 50 minutes (10 minutes per question). b) Answer all five questions in the space provided.
ENG 7854 / 9804 Industrial Machine Vision Midterm Exam March 1, 2010. Instructions: a) The duration of this exam is 50 minutes (10 minutes per question). b) Answer all five questions in the space provided.
Dealing with Scale. Stephan Weiss Computer Vision Group NASA-JPL / CalTech
 Dealing with Scale Stephan Weiss Computer Vision Group NASA-JPL / CalTech Stephan.Weiss@ieee.org (c) 2013. Government sponsorship acknowledged. Outline Why care about size? The IMU as scale provider: The
Dealing with Scale Stephan Weiss Computer Vision Group NASA-JPL / CalTech Stephan.Weiss@ieee.org (c) 2013. Government sponsorship acknowledged. Outline Why care about size? The IMU as scale provider: The
Planetary Rover Absolute Localization by Combining Visual Odometry with Orbital Image Measurements
 Planetary Rover Absolute Localization by Combining Visual Odometry with Orbital Image Measurements M. Lourakis and E. Hourdakis Institute of Computer Science Foundation for Research and Technology Hellas
Planetary Rover Absolute Localization by Combining Visual Odometry with Orbital Image Measurements M. Lourakis and E. Hourdakis Institute of Computer Science Foundation for Research and Technology Hellas
Digital Volume Correlation for Materials Characterization
 19 th World Conference on Non-Destructive Testing 2016 Digital Volume Correlation for Materials Characterization Enrico QUINTANA, Phillip REU, Edward JIMENEZ, Kyle THOMPSON, Sharlotte KRAMER Sandia National
19 th World Conference on Non-Destructive Testing 2016 Digital Volume Correlation for Materials Characterization Enrico QUINTANA, Phillip REU, Edward JIMENEZ, Kyle THOMPSON, Sharlotte KRAMER Sandia National
Motion Analysis Methods. Gerald Smith
 Motion Analysis Methods Gerald Smith Measurement Activity: How accurately can the diameter of a golf ball and a koosh ball be measured? Diameter? 1 What is the diameter of a golf ball? What errors are
Motion Analysis Methods Gerald Smith Measurement Activity: How accurately can the diameter of a golf ball and a koosh ball be measured? Diameter? 1 What is the diameter of a golf ball? What errors are
Nonlinear State Estimation for Robotics and Computer Vision Applications: An Overview
 Nonlinear State Estimation for Robotics and Computer Vision Applications: An Overview Arun Das 05/09/2017 Arun Das Waterloo Autonomous Vehicles Lab Introduction What s in a name? Arun Das Waterloo Autonomous
Nonlinear State Estimation for Robotics and Computer Vision Applications: An Overview Arun Das 05/09/2017 Arun Das Waterloo Autonomous Vehicles Lab Introduction What s in a name? Arun Das Waterloo Autonomous
Motion estimation of unmanned marine vehicles Massimo Caccia
 Motion estimation of unmanned marine vehicles Massimo Caccia Consiglio Nazionale delle Ricerche Istituto di Studi sui Sistemi Intelligenti per l Automazione Via Amendola 122 D/O, 70126, Bari, Italy massimo.caccia@ge.issia.cnr.it
Motion estimation of unmanned marine vehicles Massimo Caccia Consiglio Nazionale delle Ricerche Istituto di Studi sui Sistemi Intelligenti per l Automazione Via Amendola 122 D/O, 70126, Bari, Italy massimo.caccia@ge.issia.cnr.it
Removing Drift from Inertial Navigation System Measurements RPUG Robert Binns Mechanical Engineering Vehicle Terrain Performance Lab
 Removing Drift from Inertial Navigation System Measurements RPUG 2009 Mechanical Engineering Vehicle Terrain Performance Lab December 10, 2009 Outline Laboratory Overview Vehicle Terrain Measurement System
Removing Drift from Inertial Navigation System Measurements RPUG 2009 Mechanical Engineering Vehicle Terrain Performance Lab December 10, 2009 Outline Laboratory Overview Vehicle Terrain Measurement System
Camera model and multiple view geometry
 Chapter Camera model and multiple view geometry Before discussing how D information can be obtained from images it is important to know how images are formed First the camera model is introduced and then
Chapter Camera model and multiple view geometry Before discussing how D information can be obtained from images it is important to know how images are formed First the camera model is introduced and then
EE565:Mobile Robotics Lecture 2
 EE565:Mobile Robotics Lecture 2 Welcome Dr. Ing. Ahmad Kamal Nasir Organization Lab Course Lab grading policy (40%) Attendance = 10 % In-Lab tasks = 30 % Lab assignment + viva = 60 % Make a group Either
EE565:Mobile Robotics Lecture 2 Welcome Dr. Ing. Ahmad Kamal Nasir Organization Lab Course Lab grading policy (40%) Attendance = 10 % In-Lab tasks = 30 % Lab assignment + viva = 60 % Make a group Either
Inertial Navigation Static Calibration
 INTL JOURNAL OF ELECTRONICS AND TELECOMMUNICATIONS, 2018, VOL. 64, NO. 2, PP. 243 248 Manuscript received December 2, 2017; revised April, 2018. DOI: 10.24425/119518 Inertial Navigation Static Calibration
INTL JOURNAL OF ELECTRONICS AND TELECOMMUNICATIONS, 2018, VOL. 64, NO. 2, PP. 243 248 Manuscript received December 2, 2017; revised April, 2018. DOI: 10.24425/119518 Inertial Navigation Static Calibration
Synchronization aspects of sensor and data fusion in a research multi-sensor-system
 Synchronization aspects of sensor and data fusion in a research multi-sensor-system MCG 2016, Vichy, France 5 th International Conference on Machine Control & Guidance October 5, 2016 Jens-André Paffenholz,
Synchronization aspects of sensor and data fusion in a research multi-sensor-system MCG 2016, Vichy, France 5 th International Conference on Machine Control & Guidance October 5, 2016 Jens-André Paffenholz,
COMPARATIVE STUDY OF DIFFERENT APPROACHES FOR EFFICIENT RECTIFICATION UNDER GENERAL MOTION
 COMPARATIVE STUDY OF DIFFERENT APPROACHES FOR EFFICIENT RECTIFICATION UNDER GENERAL MOTION Mr.V.SRINIVASA RAO 1 Prof.A.SATYA KALYAN 2 DEPARTMENT OF COMPUTER SCIENCE AND ENGINEERING PRASAD V POTLURI SIDDHARTHA
COMPARATIVE STUDY OF DIFFERENT APPROACHES FOR EFFICIENT RECTIFICATION UNDER GENERAL MOTION Mr.V.SRINIVASA RAO 1 Prof.A.SATYA KALYAN 2 DEPARTMENT OF COMPUTER SCIENCE AND ENGINEERING PRASAD V POTLURI SIDDHARTHA
Dynamic Reconstruction for Coded Aperture Imaging Draft Unpublished work please do not cite or distribute.
 Dynamic Reconstruction for Coded Aperture Imaging Draft 1.0.1 Berthold K.P. Horn 2007 September 30. Unpublished work please do not cite or distribute. The dynamic reconstruction technique makes it possible
Dynamic Reconstruction for Coded Aperture Imaging Draft 1.0.1 Berthold K.P. Horn 2007 September 30. Unpublished work please do not cite or distribute. The dynamic reconstruction technique makes it possible
Stochastic Road Shape Estimation, B. Southall & C. Taylor. Review by: Christopher Rasmussen
 Stochastic Road Shape Estimation, B. Southall & C. Taylor Review by: Christopher Rasmussen September 26, 2002 Announcements Readings for next Tuesday: Chapter 14-14.4, 22-22.5 in Forsyth & Ponce Main Contributions
Stochastic Road Shape Estimation, B. Southall & C. Taylor Review by: Christopher Rasmussen September 26, 2002 Announcements Readings for next Tuesday: Chapter 14-14.4, 22-22.5 in Forsyth & Ponce Main Contributions
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
FLOW VISUALISATION OF POLYMER MELT CONTRACTION FLOWS FOR VALIDATION OF NUMERICAL SIMULATIONS
 FLOW VISUALISATION OF POLYMER MELT CONTRACTION FLOWS FOR VALIDATION OF NUMERICAL SIMULATIONS R Spares, T Gough, M T Martyn, P Olley and P D Coates IRC in Polymer Science & Technology, Mechanical & Medical
FLOW VISUALISATION OF POLYMER MELT CONTRACTION FLOWS FOR VALIDATION OF NUMERICAL SIMULATIONS R Spares, T Gough, M T Martyn, P Olley and P D Coates IRC in Polymer Science & Technology, Mechanical & Medical
A simple example. Assume we want to find the change in the rotation angles to get the end effector to G. Effect of changing s
 CENG 732 Computer Animation This week Inverse Kinematics (continued) Rigid Body Simulation Bodies in free fall Bodies in contact Spring 2006-2007 Week 5 Inverse Kinematics Physically Based Rigid Body Simulation
CENG 732 Computer Animation This week Inverse Kinematics (continued) Rigid Body Simulation Bodies in free fall Bodies in contact Spring 2006-2007 Week 5 Inverse Kinematics Physically Based Rigid Body Simulation
SEM Drift Correction. Procedure Guide
 SEM Drift Correction Procedure Guide Introduction Vic-2D includes experimental functionality to correct for both drift and geometric distortions that occur in images taken using SEMs. The correction requires
SEM Drift Correction Procedure Guide Introduction Vic-2D includes experimental functionality to correct for both drift and geometric distortions that occur in images taken using SEMs. The correction requires
Accurately measuring 2D position using a composed moiré grid pattern and DTFT
 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 Accurately measuring 2D position using a composed moiré grid pattern and DTFT S. Van
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 Accurately measuring 2D position using a composed moiré grid pattern and DTFT S. Van
Full Field Displacement and Strain Measurement. On a Charpy Specimen. Using Digital Image Correlation.
 Full Field Displacement and Strain Measurement On a Charpy Specimen Using Digital Image Correlation. Chapter 1: Introduction to Digital Image Correlation D.I.C. The method of 3-D DIGITAL IMAGE CORRELATION
Full Field Displacement and Strain Measurement On a Charpy Specimen Using Digital Image Correlation. Chapter 1: Introduction to Digital Image Correlation D.I.C. The method of 3-D DIGITAL IMAGE CORRELATION
Motion Tracking and Event Understanding in Video Sequences
 Motion Tracking and Event Understanding in Video Sequences Isaac Cohen Elaine Kang, Jinman Kang Institute for Robotics and Intelligent Systems University of Southern California Los Angeles, CA Objectives!
Motion Tracking and Event Understanding in Video Sequences Isaac Cohen Elaine Kang, Jinman Kang Institute for Robotics and Intelligent Systems University of Southern California Los Angeles, CA Objectives!
DriftLess Technology to improve inertial sensors
 Slide 1 of 19 DriftLess Technology to improve inertial sensors Marcel Ruizenaar, TNO marcel.ruizenaar@tno.nl Slide 2 of 19 Topics Problem, Drift in INS due to bias DriftLess technology What is it How it
Slide 1 of 19 DriftLess Technology to improve inertial sensors Marcel Ruizenaar, TNO marcel.ruizenaar@tno.nl Slide 2 of 19 Topics Problem, Drift in INS due to bias DriftLess technology What is it How it
MULTI-MODAL MAPPING. Robotics Day, 31 Mar Frank Mascarich, Shehryar Khattak, Tung Dang
 MULTI-MODAL MAPPING Robotics Day, 31 Mar 2017 Frank Mascarich, Shehryar Khattak, Tung Dang Application-Specific Sensors Cameras TOF Cameras PERCEPTION LiDAR IMU Localization Mapping Autonomy Robotic Perception
MULTI-MODAL MAPPING Robotics Day, 31 Mar 2017 Frank Mascarich, Shehryar Khattak, Tung Dang Application-Specific Sensors Cameras TOF Cameras PERCEPTION LiDAR IMU Localization Mapping Autonomy Robotic Perception
A Simplified Vehicle and Driver Model for Vehicle Systems Development
 A Simplified Vehicle and Driver Model for Vehicle Systems Development Martin Bayliss Cranfield University School of Engineering Bedfordshire MK43 0AL UK Abstract For the purposes of vehicle systems controller
A Simplified Vehicle and Driver Model for Vehicle Systems Development Martin Bayliss Cranfield University School of Engineering Bedfordshire MK43 0AL UK Abstract For the purposes of vehicle systems controller
5LSH0 Advanced Topics Video & Analysis
 1 Multiview 3D video / Outline 2 Advanced Topics Multimedia Video (5LSH0), Module 02 3D Geometry, 3D Multiview Video Coding & Rendering Peter H.N. de With, Sveta Zinger & Y. Morvan ( p.h.n.de.with@tue.nl
1 Multiview 3D video / Outline 2 Advanced Topics Multimedia Video (5LSH0), Module 02 3D Geometry, 3D Multiview Video Coding & Rendering Peter H.N. de With, Sveta Zinger & Y. Morvan ( p.h.n.de.with@tue.nl
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 7: Image Alignment and Panoramas What s inside your fridge? http://www.cs.washington.edu/education/courses/cse590ss/01wi/ Projection matrix intrinsics projection
CS6670: Computer Vision Noah Snavely Lecture 7: Image Alignment and Panoramas What s inside your fridge? http://www.cs.washington.edu/education/courses/cse590ss/01wi/ Projection matrix intrinsics projection
OPTICAL ANALYSIS OF AN IMPACT ATTENUATOR DEFORMATION. Richard ĎURANNA, Marián TOLNAY, Ján SLAMKA
 OPTICAL ANALYSIS OF AN IMPACT ATTENUATOR DEFORMATION Richard ĎURANNA, Marián TOLNAY, Ján SLAMKA Authors: Workplace: Address: E-mail: Richard Ďurana, MSc.Eng., Marian Tolnay, Prof. PhD., Ján Slamka, MSc.
OPTICAL ANALYSIS OF AN IMPACT ATTENUATOR DEFORMATION Richard ĎURANNA, Marián TOLNAY, Ján SLAMKA Authors: Workplace: Address: E-mail: Richard Ďurana, MSc.Eng., Marian Tolnay, Prof. PhD., Ján Slamka, MSc.
Dual-Platform GMTI: First Results With The TerraSAR-X/TanDEM-X Constellation
 Dual-Platform GMTI: First Results With The TerraSAR-X/TanDEM-X Constellation Stefan V. Baumgartner, Gerhard Krieger Microwaves and Radar Institute, German Aerospace Center (DLR) Muenchner Strasse 20, 82234
Dual-Platform GMTI: First Results With The TerraSAR-X/TanDEM-X Constellation Stefan V. Baumgartner, Gerhard Krieger Microwaves and Radar Institute, German Aerospace Center (DLR) Muenchner Strasse 20, 82234
IMAGE PROCESSING IN PIV
 ISTP-,, PRAGUE TH INTERNATIONAL SYMPOSIUM ON TRANSPORT PHENOMENA IMAGE PROCESSING IN PIV Milan Pěta, Jan Novotný Czech Technical University in Prague, Fakulty of Mechanical Engineering, Division of Fluid
ISTP-,, PRAGUE TH INTERNATIONAL SYMPOSIUM ON TRANSPORT PHENOMENA IMAGE PROCESSING IN PIV Milan Pěta, Jan Novotný Czech Technical University in Prague, Fakulty of Mechanical Engineering, Division of Fluid
Development of a Test Field for the Calibration and Evaluation of Kinematic Multi Sensor Systems
 Development of a Test Field for the Calibration and Evaluation of Kinematic Multi Sensor Systems DGK-Doktorandenseminar Graz, Austria, 26 th April 2017 Erik Heinz Institute of Geodesy and Geoinformation
Development of a Test Field for the Calibration and Evaluation of Kinematic Multi Sensor Systems DGK-Doktorandenseminar Graz, Austria, 26 th April 2017 Erik Heinz Institute of Geodesy and Geoinformation
POSITIONING A PIXEL IN A COORDINATE SYSTEM
 GEOREFERENCING AND GEOCODING EARTH OBSERVATION IMAGES GABRIEL PARODI STUDY MATERIAL: PRINCIPLES OF REMOTE SENSING AN INTRODUCTORY TEXTBOOK CHAPTER 6 POSITIONING A PIXEL IN A COORDINATE SYSTEM The essential
GEOREFERENCING AND GEOCODING EARTH OBSERVATION IMAGES GABRIEL PARODI STUDY MATERIAL: PRINCIPLES OF REMOTE SENSING AN INTRODUCTORY TEXTBOOK CHAPTER 6 POSITIONING A PIXEL IN A COORDINATE SYSTEM The essential
Visual Tracking of Unknown Moving Object by Adaptive Binocular Visual Servoing
 Visual Tracking of Unknown Moving Object by Adaptive Binocular Visual Servoing Minoru Asada, Takamaro Tanaka, and Koh Hosoda Adaptive Machine Systems Graduate School of Engineering Osaka University, Suita,
Visual Tracking of Unknown Moving Object by Adaptive Binocular Visual Servoing Minoru Asada, Takamaro Tanaka, and Koh Hosoda Adaptive Machine Systems Graduate School of Engineering Osaka University, Suita,
Lab1: Use of Word and Excel
 Dr. Fritz Wilhelm; physics 230 Lab1: Use of Word and Excel Page 1 of 9 Lab partners: Download this page onto your computer. Also download the template file which you can use whenever you start your lab
Dr. Fritz Wilhelm; physics 230 Lab1: Use of Word and Excel Page 1 of 9 Lab partners: Download this page onto your computer. Also download the template file which you can use whenever you start your lab
TEST RESULTS OF A GPS/INERTIAL NAVIGATION SYSTEM USING A LOW COST MEMS IMU
 TEST RESULTS OF A GPS/INERTIAL NAVIGATION SYSTEM USING A LOW COST MEMS IMU Alison K. Brown, Ph.D.* NAVSYS Corporation, 1496 Woodcarver Road, Colorado Springs, CO 891 USA, e-mail: abrown@navsys.com Abstract
TEST RESULTS OF A GPS/INERTIAL NAVIGATION SYSTEM USING A LOW COST MEMS IMU Alison K. Brown, Ph.D.* NAVSYS Corporation, 1496 Woodcarver Road, Colorado Springs, CO 891 USA, e-mail: abrown@navsys.com Abstract
Using Invariant Theory to Obtain Unknown Size, Shape, Motion, and Three-Dimensional Images from Single Aperture Synthetic Aperture Radar
 Using Invariant Theory to Obtain Unknown Size, Shape, Motion, and Three-Dimensional Images from Single Aperture Synthetic Aperture Radar October 2005 Mark Stuff SN-05-0378 AFRL/WS Approved Security and
Using Invariant Theory to Obtain Unknown Size, Shape, Motion, and Three-Dimensional Images from Single Aperture Synthetic Aperture Radar October 2005 Mark Stuff SN-05-0378 AFRL/WS Approved Security and
Multiple View Geometry
 Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Mobile Robotics. Mathematics, Models, and Methods. HI Cambridge. Alonzo Kelly. Carnegie Mellon University UNIVERSITY PRESS
 Mobile Robotics Mathematics, Models, and Methods Alonzo Kelly Carnegie Mellon University HI Cambridge UNIVERSITY PRESS Contents Preface page xiii 1 Introduction 1 1.1 Applications of Mobile Robots 2 1.2
Mobile Robotics Mathematics, Models, and Methods Alonzo Kelly Carnegie Mellon University HI Cambridge UNIVERSITY PRESS Contents Preface page xiii 1 Introduction 1 1.1 Applications of Mobile Robots 2 1.2
And. Modal Analysis. Using. VIC-3D-HS, High Speed 3D Digital Image Correlation System. Indian Institute of Technology New Delhi
 Full Field Displacement And Strain Measurement And Modal Analysis Using VIC-3D-HS, High Speed 3D Digital Image Correlation System At Indian Institute of Technology New Delhi VIC-3D, 3D Digital Image Correlation
Full Field Displacement And Strain Measurement And Modal Analysis Using VIC-3D-HS, High Speed 3D Digital Image Correlation System At Indian Institute of Technology New Delhi VIC-3D, 3D Digital Image Correlation
Lane Detection, Calibration, with a Multi-Layer Lidar for Vehicle Safety Systems
 Lane Detection, Calibration, and Attitude Determination with a Multi-Layer Lidar for Vehicle Safety Systems Jordan Britt Dr. John Hung Dr. David Bevly Dr. Thaddeus Roppel :Auburn University :Auburn University
Lane Detection, Calibration, and Attitude Determination with a Multi-Layer Lidar for Vehicle Safety Systems Jordan Britt Dr. John Hung Dr. David Bevly Dr. Thaddeus Roppel :Auburn University :Auburn University
Marcel Worring Intelligent Sensory Information Systems
 Marcel Worring worring@science.uva.nl Intelligent Sensory Information Systems University of Amsterdam Information and Communication Technology archives of documentaries, film, or training material, video
Marcel Worring worring@science.uva.nl Intelligent Sensory Information Systems University of Amsterdam Information and Communication Technology archives of documentaries, film, or training material, video
Measurement Techniques. Digital Particle Image Velocimetry
 Measurement Techniques Digital Particle Image Velocimetry Heat and Mass Transfer Laboratory (LTCM) Sepideh Khodaparast Marco Milan Navid Borhani 1 Content m Introduction m Particle Image Velocimetry features
Measurement Techniques Digital Particle Image Velocimetry Heat and Mass Transfer Laboratory (LTCM) Sepideh Khodaparast Marco Milan Navid Borhani 1 Content m Introduction m Particle Image Velocimetry features
Outline Sensors. EE Sensors. H.I. Bozma. Electric Electronic Engineering Bogazici University. December 13, 2017
 Electric Electronic Engineering Bogazici University December 13, 2017 Absolute position measurement Outline Motion Odometry Inertial systems Environmental Tactile Proximity Sensing Ground-Based RF Beacons
Electric Electronic Engineering Bogazici University December 13, 2017 Absolute position measurement Outline Motion Odometry Inertial systems Environmental Tactile Proximity Sensing Ground-Based RF Beacons
Stereo Observation Models
 Stereo Observation Models Gabe Sibley June 16, 2003 Abstract This technical report describes general stereo vision triangulation and linearized error modeling. 0.1 Standard Model Equations If the relative
Stereo Observation Models Gabe Sibley June 16, 2003 Abstract This technical report describes general stereo vision triangulation and linearized error modeling. 0.1 Standard Model Equations If the relative
An idea which can be used once is a trick. If it can be used more than once it becomes a method
 An idea which can be used once is a trick. If it can be used more than once it becomes a method - George Polya and Gabor Szego University of Texas at Arlington Rigid Body Transformations & Generalized
An idea which can be used once is a trick. If it can be used more than once it becomes a method - George Polya and Gabor Szego University of Texas at Arlington Rigid Body Transformations & Generalized
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
ESTIMATION OF THE DESIGN ELEMENTS OF HORIZONTAL ALIGNMENT BY THE METHOD OF LEAST SQUARES
 ESTIMATION OF THE DESIGN ELEMENTS OF HORIZONTAL ALIGNMENT BY THE METHOD OF LEAST SQUARES Jongchool LEE, Junghoon SEO and Jongho HEO, Korea ABSTRACT In this study, the road linear shape was sampled by using
ESTIMATION OF THE DESIGN ELEMENTS OF HORIZONTAL ALIGNMENT BY THE METHOD OF LEAST SQUARES Jongchool LEE, Junghoon SEO and Jongho HEO, Korea ABSTRACT In this study, the road linear shape was sampled by using
WEEKS 1-2 MECHANISMS
 References WEEKS 1-2 MECHANISMS (METU, Department of Mechanical Engineering) Text Book: Mechanisms Web Page: http://www.me.metu.edu.tr/people/eres/me301/in dex.ht Analitik Çözümlü Örneklerle Mekanizma
References WEEKS 1-2 MECHANISMS (METU, Department of Mechanical Engineering) Text Book: Mechanisms Web Page: http://www.me.metu.edu.tr/people/eres/me301/in dex.ht Analitik Çözümlü Örneklerle Mekanizma
PIV Uncertainty: Computational & Experimental Evaluation of Uncertainty Methods
 11TH INTERNATIONAL SYMPOSIUM ON PARTICLE IMAGE VELOCIMETRY PIV15 Santa Barbara, California, September 14-16, 2015 PIV Uncertainty: Computational & Experimental Evaluation of Uncertainty Methods Aaron Boomsma
11TH INTERNATIONAL SYMPOSIUM ON PARTICLE IMAGE VELOCIMETRY PIV15 Santa Barbara, California, September 14-16, 2015 PIV Uncertainty: Computational & Experimental Evaluation of Uncertainty Methods Aaron Boomsma
METR4202: ROBOTICS & AUTOMATION
 Sort Pattern A This exam paper must not be removed from the venue School of Information Technology and Electrical Engineering Mid-Term Quiz METR4202: ROBOTICS & AUTOMATION September 20, 2017 First Name:
Sort Pattern A This exam paper must not be removed from the venue School of Information Technology and Electrical Engineering Mid-Term Quiz METR4202: ROBOTICS & AUTOMATION September 20, 2017 First Name:
Live Metric 3D Reconstruction on Mobile Phones ICCV 2013
 Live Metric 3D Reconstruction on Mobile Phones ICCV 2013 Main Contents 1. Target & Related Work 2. Main Features of This System 3. System Overview & Workflow 4. Detail of This System 5. Experiments 6.
Live Metric 3D Reconstruction on Mobile Phones ICCV 2013 Main Contents 1. Target & Related Work 2. Main Features of This System 3. System Overview & Workflow 4. Detail of This System 5. Experiments 6.
3D Reconstruction from Scene Knowledge
 Multiple-View Reconstruction from Scene Knowledge 3D Reconstruction from Scene Knowledge SYMMETRY & MULTIPLE-VIEW GEOMETRY Fundamental types of symmetry Equivalent views Symmetry based reconstruction MUTIPLE-VIEW
Multiple-View Reconstruction from Scene Knowledge 3D Reconstruction from Scene Knowledge SYMMETRY & MULTIPLE-VIEW GEOMETRY Fundamental types of symmetry Equivalent views Symmetry based reconstruction MUTIPLE-VIEW
Laser scanning approach to acquire operational deflection shapes of civil structures: the SCADD system
 Laser scanning approach to acquire operational deflection shapes of civil structures: the SCADD system José L. Fernández ndez,, Rafael Comesaña, Cristina Trillo, Ángel F. Doval and J. Carlos LópezL pez-vázquezzquez
Laser scanning approach to acquire operational deflection shapes of civil structures: the SCADD system José L. Fernández ndez,, Rafael Comesaña, Cristina Trillo, Ángel F. Doval and J. Carlos LópezL pez-vázquezzquez
Robot Vision: Camera calibration
 Robot Vision: Camera calibration Ass.Prof. Friedrich Fraundorfer SS 201 1 Outline Camera calibration Cameras with lenses Properties of real lenses (distortions, focal length, field-of-view) Calibration
Robot Vision: Camera calibration Ass.Prof. Friedrich Fraundorfer SS 201 1 Outline Camera calibration Cameras with lenses Properties of real lenses (distortions, focal length, field-of-view) Calibration
Tightly-Integrated Visual and Inertial Navigation for Pinpoint Landing on Rugged Terrains
 Tightly-Integrated Visual and Inertial Navigation for Pinpoint Landing on Rugged Terrains PhD student: Jeff DELAUNE ONERA Director: Guy LE BESNERAIS ONERA Advisors: Jean-Loup FARGES Clément BOURDARIAS
Tightly-Integrated Visual and Inertial Navigation for Pinpoint Landing on Rugged Terrains PhD student: Jeff DELAUNE ONERA Director: Guy LE BESNERAIS ONERA Advisors: Jean-Loup FARGES Clément BOURDARIAS
Calibration of Inertial Measurement Units Using Pendulum Motion
 Technical Paper Int l J. of Aeronautical & Space Sci. 11(3), 234 239 (2010) DOI:10.5139/IJASS.2010.11.3.234 Calibration of Inertial Measurement Units Using Pendulum Motion Keeyoung Choi* and Se-ah Jang**
Technical Paper Int l J. of Aeronautical & Space Sci. 11(3), 234 239 (2010) DOI:10.5139/IJASS.2010.11.3.234 Calibration of Inertial Measurement Units Using Pendulum Motion Keeyoung Choi* and Se-ah Jang**
APPLICATION OF AERIAL VIDEO FOR TRAFFIC FLOW MONITORING AND MANAGEMENT
 Pitu Mirchandani, Professor, Department of Systems and Industrial Engineering Mark Hickman, Assistant Professor, Department of Civil Engineering Alejandro Angel, Graduate Researcher Dinesh Chandnani, Graduate
Pitu Mirchandani, Professor, Department of Systems and Industrial Engineering Mark Hickman, Assistant Professor, Department of Civil Engineering Alejandro Angel, Graduate Researcher Dinesh Chandnani, Graduate
Geometric Rectification of Remote Sensing Images
 Geometric Rectification of Remote Sensing Images Airborne TerrestriaL Applications Sensor (ATLAS) Nine flight paths were recorded over the city of Providence. 1 True color ATLAS image (bands 4, 2, 1 in
Geometric Rectification of Remote Sensing Images Airborne TerrestriaL Applications Sensor (ATLAS) Nine flight paths were recorded over the city of Providence. 1 True color ATLAS image (bands 4, 2, 1 in
Experimental Studies of Flapping-wing Aerodynamics
 Experimental Studies of Flapping-wing Aerodynamics N. Phillips Aeromechanical Systems Group Cranfield University Defence Academy of the UK Shrivenham, Swindon, UK SN6 8LA Tel: 01793 78 5271 Fax: 01793
Experimental Studies of Flapping-wing Aerodynamics N. Phillips Aeromechanical Systems Group Cranfield University Defence Academy of the UK Shrivenham, Swindon, UK SN6 8LA Tel: 01793 78 5271 Fax: 01793
(W: 12:05-1:50, 50-N202)
") 2016 School of Information Technology and Electrical Engineering at the University of Queensland Schedule of Events Week Date Lecture (W: 12:05-1:50, 50-N202) 1 27-Jul Introduction 2 Representing Position
2016 School of Information Technology and Electrical Engineering at the University of Queensland Schedule of Events Week Date Lecture (W: 12:05-1:50, 50-N202) 1 27-Jul Introduction 2 Representing Position
Lecture «Robot Dynamics»: Kinematic Control
 Lecture «Robot Dynamics»: Kinematic Control 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco Hutter,
Lecture «Robot Dynamics»: Kinematic Control 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco Hutter,
TEPZZ 85 9Z_A_T EP A1 (19) (11) EP A1 (12) EUROPEAN PATENT APPLICATION
 (11) EP A1 (12) EUROPEAN PATENT APPLICATION") (19) TEPZZ 8 9Z_A_T (11) EP 2 83 901 A1 (12) EUROPEAN PATENT APPLICATION (43) Date of publication: 01.04.1 Bulletin 1/14 (21) Application number: 141861.1 (1) Int Cl.: G01P 21/00 (06.01) G01C 2/00 (06.01)
(19) TEPZZ 8 9Z_A_T (11) EP 2 83 901 A1 (12) EUROPEAN PATENT APPLICATION (43) Date of publication: 01.04.1 Bulletin 1/14 (21) Application number: 141861.1 (1) Int Cl.: G01P 21/00 (06.01) G01C 2/00 (06.01)
A Longitudinal Control Algorithm for Smart Cruise Control with Virtual Parameters
 ISSN (e): 2250 3005 Volume, 06 Issue, 12 December 2016 International Journal of Computational Engineering Research (IJCER) A Longitudinal Control Algorithm for Smart Cruise Control with Virtual Parameters
ISSN (e): 2250 3005 Volume, 06 Issue, 12 December 2016 International Journal of Computational Engineering Research (IJCER) A Longitudinal Control Algorithm for Smart Cruise Control with Virtual Parameters
CV: 3D to 2D mathematics. Perspective transformation; camera calibration; stereo computation; and more
 CV: 3D to 2D mathematics Perspective transformation; camera calibration; stereo computation; and more Roadmap of topics n Review perspective transformation n Camera calibration n Stereo methods n Structured
CV: 3D to 2D mathematics Perspective transformation; camera calibration; stereo computation; and more Roadmap of topics n Review perspective transformation n Camera calibration n Stereo methods n Structured
Physics 1020 Experiment 3. Acceleration of Falling Objects
 1 2 Part I: Introduction In this experiment you will study the motion of a falling ball which experiences constant acceleration. You will use a Motion Detector to measure the position of the ball as a
1 2 Part I: Introduction In this experiment you will study the motion of a falling ball which experiences constant acceleration. You will use a Motion Detector to measure the position of the ball as a
Geometric Accuracy Evaluation, DEM Generation and Validation for SPOT-5 Level 1B Stereo Scene
 Geometric Accuracy Evaluation, DEM Generation and Validation for SPOT-5 Level 1B Stereo Scene Buyuksalih, G.*, Oruc, M.*, Topan, H.*,.*, Jacobsen, K.** * Karaelmas University Zonguldak, Turkey **University
Geometric Accuracy Evaluation, DEM Generation and Validation for SPOT-5 Level 1B Stereo Scene Buyuksalih, G.*, Oruc, M.*, Topan, H.*,.*, Jacobsen, K.** * Karaelmas University Zonguldak, Turkey **University
Introduction to Autonomous Mobile Robots
 Introduction to Autonomous Mobile Robots second edition Roland Siegwart, Illah R. Nourbakhsh, and Davide Scaramuzza The MIT Press Cambridge, Massachusetts London, England Contents Acknowledgments xiii
Introduction to Autonomous Mobile Robots second edition Roland Siegwart, Illah R. Nourbakhsh, and Davide Scaramuzza The MIT Press Cambridge, Massachusetts London, England Contents Acknowledgments xiii
Autonomous Navigation for Flying Robots
 Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 3.2: Sensors Jürgen Sturm Technische Universität München Sensors IMUs (inertial measurement units) Accelerometers
Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 3.2: Sensors Jürgen Sturm Technische Universität München Sensors IMUs (inertial measurement units) Accelerometers
The Applanix Approach to GPS/INS Integration
 Lithopoulos 53 The Applanix Approach to GPS/INS Integration ERIK LITHOPOULOS, Markham ABSTRACT The Position and Orientation System for Direct Georeferencing (POS/DG) is an off-the-shelf integrated GPS/inertial
Lithopoulos 53 The Applanix Approach to GPS/INS Integration ERIK LITHOPOULOS, Markham ABSTRACT The Position and Orientation System for Direct Georeferencing (POS/DG) is an off-the-shelf integrated GPS/inertial
Correcting INS Drift in Terrain Surface Measurements. Heather Chemistruck Ph.D. Student Mechanical Engineering Vehicle Terrain Performance Lab
 Correcting INS Drift in Terrain Surface Measurements Ph.D. Student Mechanical Engineering Vehicle Terrain Performance Lab October 25, 2010 Outline Laboratory Overview Vehicle Terrain Measurement System
Correcting INS Drift in Terrain Surface Measurements Ph.D. Student Mechanical Engineering Vehicle Terrain Performance Lab October 25, 2010 Outline Laboratory Overview Vehicle Terrain Measurement System
Particle Velocimetry Data from COMSOL Model of Micro-channels
 Particle Velocimetry Data from COMSOL Model of Micro-channels P.Mahanti *,1, M.Keebaugh 1, N.Weiss 1, P.Jones 1, M.Hayes 1, T.Taylor 1 Arizona State University, Tempe, Arizona *Corresponding author: GWC
Particle Velocimetry Data from COMSOL Model of Micro-channels P.Mahanti *,1, M.Keebaugh 1, N.Weiss 1, P.Jones 1, M.Hayes 1, T.Taylor 1 Arizona State University, Tempe, Arizona *Corresponding author: GWC
High Altitude Balloon Localization from Photographs
 High Altitude Balloon Localization from Photographs Paul Norman and Daniel Bowman Bovine Aerospace August 27, 2013 Introduction On December 24, 2011, we launched a high altitude balloon equipped with a
High Altitude Balloon Localization from Photographs Paul Norman and Daniel Bowman Bovine Aerospace August 27, 2013 Introduction On December 24, 2011, we launched a high altitude balloon equipped with a
Calibration of kinematic LiDAR for Marine Infrastructure Inspection
 1/22 Calibration of kinematic LiDAR for Marine Infrastructure Inspection A. Picard, N. Seube, T. Touze Ocean Sensing and Mapping Lab. ENSTA Bretagne Brest FRANCE and CIDCO Rimouski CANADA, Qc Forum PPMD,
1/22 Calibration of kinematic LiDAR for Marine Infrastructure Inspection A. Picard, N. Seube, T. Touze Ocean Sensing and Mapping Lab. ENSTA Bretagne Brest FRANCE and CIDCO Rimouski CANADA, Qc Forum PPMD,
Light source estimation using feature points from specular highlights and cast shadows
 Vol. 11(13), pp. 168-177, 16 July, 2016 DOI: 10.5897/IJPS2015.4274 Article Number: F492B6D59616 ISSN 1992-1950 Copyright 2016 Author(s) retain the copyright of this article http://www.academicjournals.org/ijps
Vol. 11(13), pp. 168-177, 16 July, 2016 DOI: 10.5897/IJPS2015.4274 Article Number: F492B6D59616 ISSN 1992-1950 Copyright 2016 Author(s) retain the copyright of this article http://www.academicjournals.org/ijps
FAB verses tradition camera-based motion capture systems
 FAB verses tradition camera-based motion capture systems The advent of micromachined inertial sensors, such as rate gyroscopes and accelerometers, has made new navigation and tracking technologies possible.
FAB verses tradition camera-based motion capture systems The advent of micromachined inertial sensors, such as rate gyroscopes and accelerometers, has made new navigation and tracking technologies possible.
Using LoggerPro. Nothing is more terrible than to see ignorance in action. J. W. Goethe ( )
") Using LoggerPro Nothing is more terrible than to see ignorance in action. J. W. Goethe (1749-1832) LoggerPro is a general-purpose program for acquiring, graphing and analyzing data. It can accept input
Using LoggerPro Nothing is more terrible than to see ignorance in action. J. W. Goethe (1749-1832) LoggerPro is a general-purpose program for acquiring, graphing and analyzing data. It can accept input
The basics of rigidity
 The basics of rigidity Lectures I and II Session on Granular Matter Institut Henri Poincaré R. Connelly Cornell University Department of Mathematics 1 What determines rigidity? 2 What determines rigidity?
The basics of rigidity Lectures I and II Session on Granular Matter Institut Henri Poincaré R. Connelly Cornell University Department of Mathematics 1 What determines rigidity? 2 What determines rigidity?
NOISE PROPAGATION FROM VIBRATING STRUCTURES
 NOISE PROPAGATION FROM VIBRATING STRUCTURES Abstract R. Helfrich, M. Spriegel (INTES GmbH, Germany) Noise and noise exposure are becoming more important in product development due to environmental legislation.
NOISE PROPAGATION FROM VIBRATING STRUCTURES Abstract R. Helfrich, M. Spriegel (INTES GmbH, Germany) Noise and noise exposure are becoming more important in product development due to environmental legislation.
Structure from Motion. Prof. Marco Marcon
 Structure from Motion Prof. Marco Marcon Summing-up 2 Stereo is the most powerful clue for determining the structure of a scene Another important clue is the relative motion between the scene and (mono)
Structure from Motion Prof. Marco Marcon Summing-up 2 Stereo is the most powerful clue for determining the structure of a scene Another important clue is the relative motion between the scene and (mono)
Digital Image Correlation Compared to Strain Gauge
 Digital Image Correlation Compared to Strain Gauge Abstract: This report presents the test results from a stereo digital image correlation system, in which two samples were pulled on a tensile test machine.
Digital Image Correlation Compared to Strain Gauge Abstract: This report presents the test results from a stereo digital image correlation system, in which two samples were pulled on a tensile test machine.
Comparison between Motion Analysis and Stereo
 MOTION ESTIMATION The slides are from several sources through James Hays (Brown); Silvio Savarese (U. of Michigan); Octavia Camps (Northeastern); including their own slides. Comparison between Motion Analysis
MOTION ESTIMATION The slides are from several sources through James Hays (Brown); Silvio Savarese (U. of Michigan); Octavia Camps (Northeastern); including their own slides. Comparison between Motion Analysis
Using Photo Modeling to Obtain the Modes of a Structure
 Using Photo Modeling to Obtain the Modes of a Structure Shawn and Mark Richardson, Vibrant Technology, Inc., Scotts Valley, California Photo modeling technology has progressed to the point where a dimensionally
Using Photo Modeling to Obtain the Modes of a Structure Shawn and Mark Richardson, Vibrant Technology, Inc., Scotts Valley, California Photo modeling technology has progressed to the point where a dimensionally
A non-contact optical technique for vehicle tracking along bounded trajectories
 Home Search Collections Journals About Contact us My IOPscience A non-contact optical technique for vehicle tracking along bounded trajectories This content has been downloaded from IOPscience. Please
Home Search Collections Journals About Contact us My IOPscience A non-contact optical technique for vehicle tracking along bounded trajectories This content has been downloaded from IOPscience. Please
3D Sensing. 3D Shape from X. Perspective Geometry. Camera Model. Camera Calibration. General Stereo Triangulation.
 3D Sensing 3D Shape from X Perspective Geometry Camera Model Camera Calibration General Stereo Triangulation 3D Reconstruction 3D Shape from X shading silhouette texture stereo light striping motion mainly
3D Sensing 3D Shape from X Perspective Geometry Camera Model Camera Calibration General Stereo Triangulation 3D Reconstruction 3D Shape from X shading silhouette texture stereo light striping motion mainly
Review and Implementation of DWT based Scalable Video Coding with Scalable Motion Coding.
 Project Title: Review and Implementation of DWT based Scalable Video Coding with Scalable Motion Coding. Midterm Report CS 584 Multimedia Communications Submitted by: Syed Jawwad Bukhari 2004-03-0028 About
Project Title: Review and Implementation of DWT based Scalable Video Coding with Scalable Motion Coding. Midterm Report CS 584 Multimedia Communications Submitted by: Syed Jawwad Bukhari 2004-03-0028 About
OPTIMIZING 3D SURFACE CHARACTERISTICS DATA COLLECTION BY RE-USING THE DATA FOR PROJECT LEVEL ROAD DESIGN
 OPTIMIZING 3D SURFACE CHARACTERISTICS DATA COLLECTION BY RE-USING THE DATA FOR PROJECT LEVEL ROAD DESIGN Benoit Petitclerc, P.E. John Laurent, M. Sc Richard Habel, M. Sc., Pavemetrics Systems Inc., Canada
OPTIMIZING 3D SURFACE CHARACTERISTICS DATA COLLECTION BY RE-USING THE DATA FOR PROJECT LEVEL ROAD DESIGN Benoit Petitclerc, P.E. John Laurent, M. Sc Richard Habel, M. Sc., Pavemetrics Systems Inc., Canada
Real Time Multi-Sensor Data Acquisition and Processing for a Road Mapping System
 Real Time Multi-Sensor Data Acquisition and Processing for a Road Mapping System by Xiang Luo A thesis submitted for the degree of Master of Engineering (Research) Faculty of Engineering and Information
Real Time Multi-Sensor Data Acquisition and Processing for a Road Mapping System by Xiang Luo A thesis submitted for the degree of Master of Engineering (Research) Faculty of Engineering and Information
Self-calibration of telecentric lenses : application to bubbly flow using moving stereoscopic camera.
 Self-calibration of telecentric lenses : application to bubbly flow using moving stereoscopic camera. S. COUDERT 1*, T. FOURNEL 1, J.-M. LAVEST 2, F. COLLANGE 2 and J.-P. SCHON 1 1 LTSI, Université Jean
Self-calibration of telecentric lenses : application to bubbly flow using moving stereoscopic camera. S. COUDERT 1*, T. FOURNEL 1, J.-M. LAVEST 2, F. COLLANGE 2 and J.-P. SCHON 1 1 LTSI, Université Jean
Theory of Machines Course # 1
 Theory of Machines Course # 1 Ayman Nada Assistant Professor Jazan University, KSA. arobust@tedata.net.eg March 29, 2010 ii Sucess is not coming in a day 1 2 Chapter 1 INTRODUCTION 1.1 Introduction Mechanisms
Theory of Machines Course # 1 Ayman Nada Assistant Professor Jazan University, KSA. arobust@tedata.net.eg March 29, 2010 ii Sucess is not coming in a day 1 2 Chapter 1 INTRODUCTION 1.1 Introduction Mechanisms
The Impact of Current and Future Global Navigation Satellite Systems on Precise Carrier Phase Positioning
 The Impact of Current and Future Global Navigation Satellite Systems on Precise Carrier Phase Positioning R.Murat Demirer R.Murat Demirer( CORS Project) 1 Potential Applications of the Global Positioning
The Impact of Current and Future Global Navigation Satellite Systems on Precise Carrier Phase Positioning R.Murat Demirer R.Murat Demirer( CORS Project) 1 Potential Applications of the Global Positioning
Modeling, Parameter Estimation, and Navigation of Indoor Quadrotor Robots
 Brigham Young University BYU ScholarsArchive All Theses and Dissertations 2013-04-29 Modeling, Parameter Estimation, and Navigation of Indoor Quadrotor Robots Stephen C. Quebe Brigham Young University
Brigham Young University BYU ScholarsArchive All Theses and Dissertations 2013-04-29 Modeling, Parameter Estimation, and Navigation of Indoor Quadrotor Robots Stephen C. Quebe Brigham Young University
1 Projective Geometry
 CIS8, Machine Perception Review Problem - SPRING 26 Instructions. All coordinate systems are right handed. Projective Geometry Figure : Facade rectification. I took an image of a rectangular object, and
CIS8, Machine Perception Review Problem - SPRING 26 Instructions. All coordinate systems are right handed. Projective Geometry Figure : Facade rectification. I took an image of a rectangular object, and