MULTI-MODAL MAPPING. Robotics Day, 31 Mar Frank Mascarich, Shehryar Khattak, Tung Dang
|
|
|
- Eleanor Wood
- 5 years ago
- Views:
Transcription

1 MULTI-MODAL MAPPING Robotics Day, 31 Mar 2017 Frank Mascarich, Shehryar Khattak, Tung Dang





2 Application-Specific Sensors Cameras TOF Cameras PERCEPTION LiDAR IMU Localization Mapping Autonomy

3 Robotic Perception
")

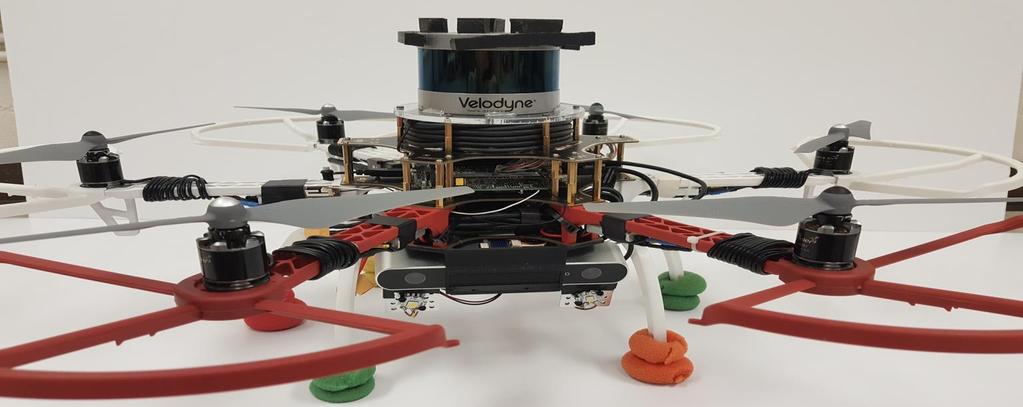
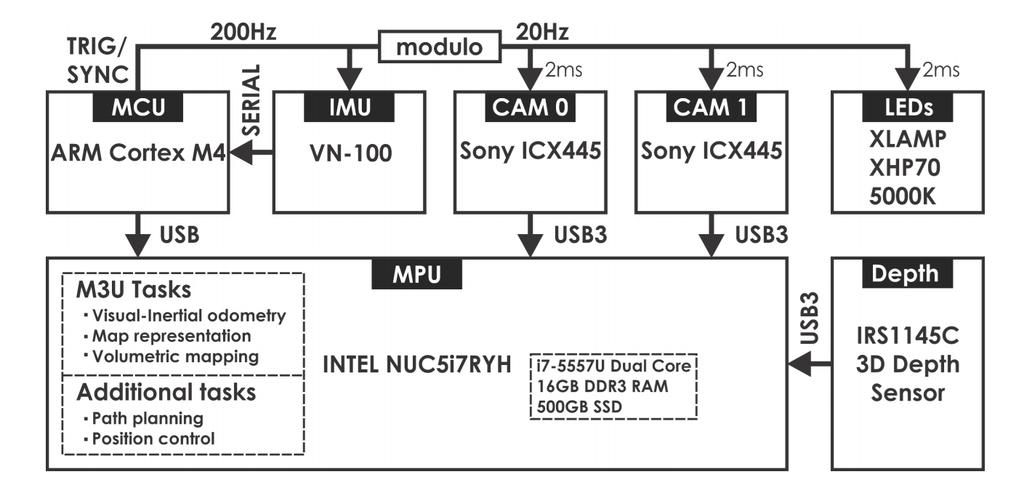
4 Robotic Perception M3U (Multi-Modal Mapping Unit) Synchronization Extendable Multi-modal Multi-camera Application-specific sensing
5 M3U

6 M3U

7 M3U



8 Camera Systems Camera Systems Monocular Camera Systems Stereo Camera Systems Used to correlate position against static environment Require precise calibration Modalities Visible Light IR UV
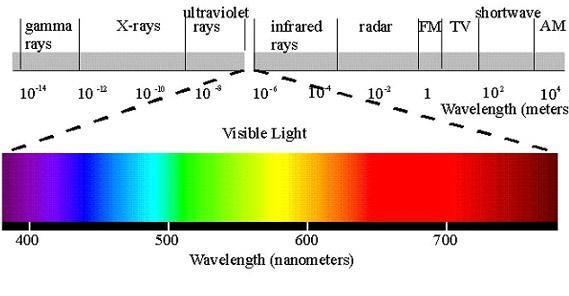
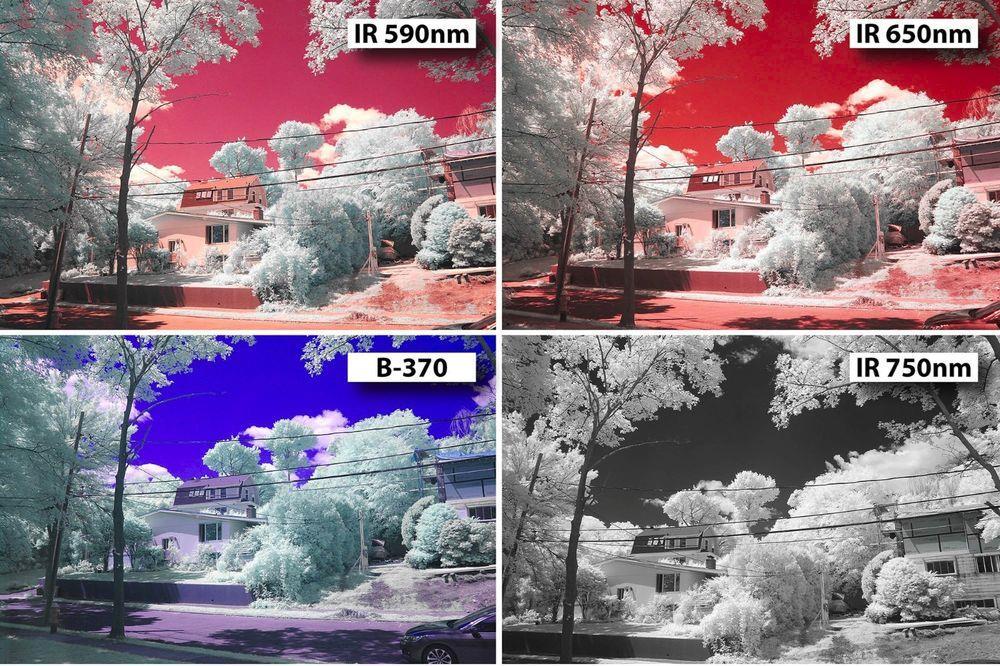

9 Alternative Spectra

 Pressure")

10 Navigation Sensors Inertial Sensors: Accelerometers Gyroscopes Magnetometers (digital compass) Pressure Sensors Barometric pressure for altitude sensing Airspeed measurements


11 LiDAR Time of flight measurement Multiple beams Different fields of view

12 Application Specific Sensing Radiation Mapping 2x pin-diode detectors Mounted with a 45cm stereo baseline MCU integrates radiation pulses over time and sends data to the MPU Main processor tracks the position of the robot and annotates its map with the radiation data from the MCU Utilize radiation data to localize sources in an unknown environment Applications: Pin-Diode Detectors Security Environmental disaster monitoring Decommissioning nuclear facilities
13 Radiation Detection and Mapping
14 Synchronization IMU and Camera data is transmitted over USB Unpredictable data arrival Software Synchronization Hardware Synchronization Allows precise triggering




15 Visual Odometry Visual Odometry is the process of estimating the position and orientation of a camera by analyzing a sequence of camera images. Acquire Images Undistort Detect Features Track Features Estimate Motion Image 1 Image 2




16 Visual Odometry Disparity is the distance by which objects shift from one image to another Disparity is greater for objects that are closer Allows stereo cameras to estimate depth without motion


17 Visual-Inertial Odometry Performance is dependent on the quality of the scene and computational capability of the system Inertial sensors provide acceleration and angular velocity at high speed Motion is estimated by doing integration Prone to drift, so not viable over longer period, but effective over short time frames
18 Visual-Inertial Odometry How to combine Visual and Inertial measurements in a mathematical and probabilistic way? Works in a two-step manner: Take Extended Take (Sensor Take Weighted Kalman Statistics) Filter Average Filter Filter Average Average (EKF) Prediction Step: Propagates System model and predicts the state of the robot. Correction Step: Corrects the predicted state and updates the covariance of state parameters. Implemented EKF propagates a linearized model using IMU measurements as inputs and corrects prediction using vision measurements Estimates State of the robot: X Position, Velocity, Orientation
19
20 Visual-Inertial Odometry What can we do with this VI pipeline? Odometry Feature depth information Enables us to explore and map unknown environments Localization Mapping Addresses the famous chicken and egg problem in robotics known as Simultaneous Localization and Mapping (SLAM) Where am I? What s around me?


21 Visual-Inertial Odometry Odometry is prone to drift Cannot perform in visually degraded environments Mapping is limited by the camera s field of view

22

23





24 Velodyne Hokuyo Realsense Picoflexx Laser range sensors Characteristics Picoflexx, Realsense Velodyne, Hokuyo Size - + Weight - + FOV - + Range - + Dense point cloud + -
")
25 ICP (Iterative Closest Point)
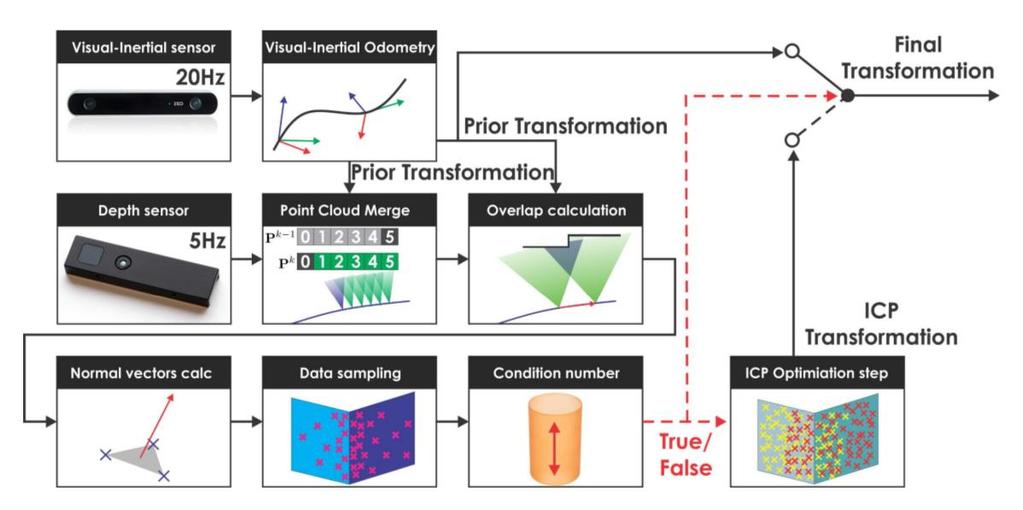
26 Multi-modal approach

27 Visual Inertial Odometry enhanced Geometrically Stable ICP
28

29 Thank you!
Autonomous Mobile Robot Design
 Autonomous Mobile Robot Design Topic: EKF-based SLAM Dr. Kostas Alexis (CSE) These slides have partially relied on the course of C. Stachniss, Robot Mapping - WS 2013/14 Autonomous Robot Challenges Where
Autonomous Mobile Robot Design Topic: EKF-based SLAM Dr. Kostas Alexis (CSE) These slides have partially relied on the course of C. Stachniss, Robot Mapping - WS 2013/14 Autonomous Robot Challenges Where
Camera Drones Lecture 2 Control and Sensors
 Camera Drones Lecture 2 Control and Sensors Ass.Prof. Friedrich Fraundorfer WS 2017 1 Outline Quadrotor control principles Sensors 2 Quadrotor control - Hovering Hovering means quadrotor needs to hold
Camera Drones Lecture 2 Control and Sensors Ass.Prof. Friedrich Fraundorfer WS 2017 1 Outline Quadrotor control principles Sensors 2 Quadrotor control - Hovering Hovering means quadrotor needs to hold
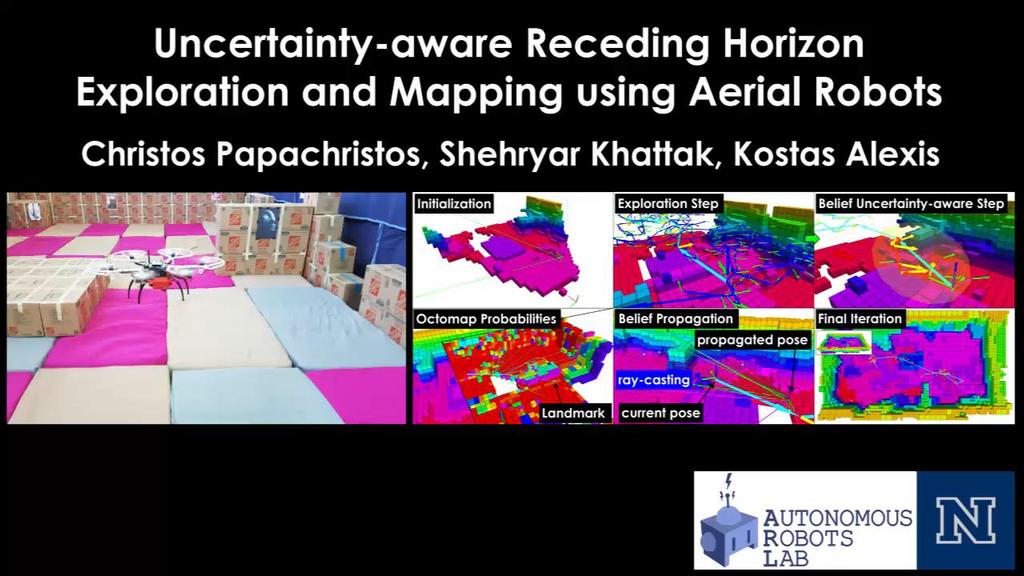
Aerial Robotic Autonomous Exploration & Mapping in Degraded Visual Environments. Kostas Alexis Autonomous Robots Lab, University of Nevada, Reno
 Aerial Robotic Autonomous Exploration & Mapping in Degraded Visual Environments Kostas Alexis Autonomous Robots Lab, University of Nevada, Reno Motivation Aerial robotic operation in GPS-denied Degraded
Aerial Robotic Autonomous Exploration & Mapping in Degraded Visual Environments Kostas Alexis Autonomous Robots Lab, University of Nevada, Reno Motivation Aerial robotic operation in GPS-denied Degraded
CSE 527: Introduction to Computer Vision
 CSE 527: Introduction to Computer Vision Week 10 Class 2: Visual Odometry November 2nd, 2017 Today Visual Odometry Intro Algorithm SLAM Visual Odometry Input Output Images, Video Camera trajectory, motion
CSE 527: Introduction to Computer Vision Week 10 Class 2: Visual Odometry November 2nd, 2017 Today Visual Odometry Intro Algorithm SLAM Visual Odometry Input Output Images, Video Camera trajectory, motion
Autonomous Navigation in Complex Indoor and Outdoor Environments with Micro Aerial Vehicles
 Autonomous Navigation in Complex Indoor and Outdoor Environments with Micro Aerial Vehicles Shaojie Shen Dept. of Electrical and Systems Engineering & GRASP Lab, University of Pennsylvania Committee: Daniel
Autonomous Navigation in Complex Indoor and Outdoor Environments with Micro Aerial Vehicles Shaojie Shen Dept. of Electrical and Systems Engineering & GRASP Lab, University of Pennsylvania Committee: Daniel
W4. Perception & Situation Awareness & Decision making
 W4. Perception & Situation Awareness & Decision making Robot Perception for Dynamic environments: Outline & DP-Grids concept Dynamic Probabilistic Grids Bayesian Occupancy Filter concept Dynamic Probabilistic
W4. Perception & Situation Awareness & Decision making Robot Perception for Dynamic environments: Outline & DP-Grids concept Dynamic Probabilistic Grids Bayesian Occupancy Filter concept Dynamic Probabilistic
Overview. EECS 124, UC Berkeley, Spring 2008 Lecture 23: Localization and Mapping. Statistical Models
 Introduction ti to Embedded dsystems EECS 124, UC Berkeley, Spring 2008 Lecture 23: Localization and Mapping Gabe Hoffmann Ph.D. Candidate, Aero/Astro Engineering Stanford University Statistical Models
Introduction ti to Embedded dsystems EECS 124, UC Berkeley, Spring 2008 Lecture 23: Localization and Mapping Gabe Hoffmann Ph.D. Candidate, Aero/Astro Engineering Stanford University Statistical Models
DD2426 Robotics and Autonomous Systems Lecture 4: Robot Sensors and Perception
 DD2426 Robotics and Autonomous Systems Lecture 4: Robot Sensors and Perception Patric Jensfelt Kungliga Tekniska Högskolan patric@kth.se April 8,2008 Example: Robots and sensors B21 (Real world interfaces)
DD2426 Robotics and Autonomous Systems Lecture 4: Robot Sensors and Perception Patric Jensfelt Kungliga Tekniska Högskolan patric@kth.se April 8,2008 Example: Robots and sensors B21 (Real world interfaces)
Mobile Robotics. Mathematics, Models, and Methods. HI Cambridge. Alonzo Kelly. Carnegie Mellon University UNIVERSITY PRESS
 Mobile Robotics Mathematics, Models, and Methods Alonzo Kelly Carnegie Mellon University HI Cambridge UNIVERSITY PRESS Contents Preface page xiii 1 Introduction 1 1.1 Applications of Mobile Robots 2 1.2
Mobile Robotics Mathematics, Models, and Methods Alonzo Kelly Carnegie Mellon University HI Cambridge UNIVERSITY PRESS Contents Preface page xiii 1 Introduction 1 1.1 Applications of Mobile Robots 2 1.2
Zürich. Roland Siegwart Margarita Chli Martin Rufli Davide Scaramuzza. ETH Master Course: L Autonomous Mobile Robots Summary
 Roland Siegwart Margarita Chli Martin Rufli Davide Scaramuzza ETH Master Course: 151-0854-00L Autonomous Mobile Robots Summary 2 Lecture Overview Mobile Robot Control Scheme knowledge, data base mission
Roland Siegwart Margarita Chli Martin Rufli Davide Scaramuzza ETH Master Course: 151-0854-00L Autonomous Mobile Robots Summary 2 Lecture Overview Mobile Robot Control Scheme knowledge, data base mission
Sensor Modalities. Sensor modality: Different modalities:
 Sensor Modalities Sensor modality: Sensors which measure same form of energy and process it in similar ways Modality refers to the raw input used by the sensors Different modalities: Sound Pressure Temperature
Sensor Modalities Sensor modality: Sensors which measure same form of energy and process it in similar ways Modality refers to the raw input used by the sensors Different modalities: Sound Pressure Temperature
Dealing with Scale. Stephan Weiss Computer Vision Group NASA-JPL / CalTech
 Dealing with Scale Stephan Weiss Computer Vision Group NASA-JPL / CalTech Stephan.Weiss@ieee.org (c) 2013. Government sponsorship acknowledged. Outline Why care about size? The IMU as scale provider: The
Dealing with Scale Stephan Weiss Computer Vision Group NASA-JPL / CalTech Stephan.Weiss@ieee.org (c) 2013. Government sponsorship acknowledged. Outline Why care about size? The IMU as scale provider: The
UAV Autonomous Navigation in a GPS-limited Urban Environment
 UAV Autonomous Navigation in a GPS-limited Urban Environment Yoko Watanabe DCSD/CDIN JSO-Aerial Robotics 2014/10/02-03 Introduction 2 Global objective Development of a UAV onboard system to maintain flight
UAV Autonomous Navigation in a GPS-limited Urban Environment Yoko Watanabe DCSD/CDIN JSO-Aerial Robotics 2014/10/02-03 Introduction 2 Global objective Development of a UAV onboard system to maintain flight
Egomotion Estimation by Point-Cloud Back-Mapping
 Egomotion Estimation by Point-Cloud Back-Mapping Haokun Geng, Radu Nicolescu, and Reinhard Klette Department of Computer Science, University of Auckland, New Zealand hgen001@aucklanduni.ac.nz Abstract.
Egomotion Estimation by Point-Cloud Back-Mapping Haokun Geng, Radu Nicolescu, and Reinhard Klette Department of Computer Science, University of Auckland, New Zealand hgen001@aucklanduni.ac.nz Abstract.
Tightly-Integrated Visual and Inertial Navigation for Pinpoint Landing on Rugged Terrains
 Tightly-Integrated Visual and Inertial Navigation for Pinpoint Landing on Rugged Terrains PhD student: Jeff DELAUNE ONERA Director: Guy LE BESNERAIS ONERA Advisors: Jean-Loup FARGES Clément BOURDARIAS
Tightly-Integrated Visual and Inertial Navigation for Pinpoint Landing on Rugged Terrains PhD student: Jeff DELAUNE ONERA Director: Guy LE BESNERAIS ONERA Advisors: Jean-Loup FARGES Clément BOURDARIAS
Sensor Fusion: Potential, Challenges and Applications. Presented by KVH Industries and Geodetics, Inc. December 2016
 Sensor Fusion: Potential, Challenges and Applications Presented by KVH Industries and Geodetics, Inc. December 2016 1 KVH Industries Overview Innovative technology company 600 employees worldwide Focused
Sensor Fusion: Potential, Challenges and Applications Presented by KVH Industries and Geodetics, Inc. December 2016 1 KVH Industries Overview Innovative technology company 600 employees worldwide Focused
Camera and Inertial Sensor Fusion
 January 6, 2018 For First Robotics 2018 Camera and Inertial Sensor Fusion David Zhang david.chao.zhang@gmail.com Version 4.1 1 My Background Ph.D. of Physics - Penn State Univ. Research scientist at SRI
January 6, 2018 For First Robotics 2018 Camera and Inertial Sensor Fusion David Zhang david.chao.zhang@gmail.com Version 4.1 1 My Background Ph.D. of Physics - Penn State Univ. Research scientist at SRI
Computationally Efficient Visual-inertial Sensor Fusion for GPS-denied Navigation on a Small Quadrotor
 Computationally Efficient Visual-inertial Sensor Fusion for GPS-denied Navigation on a Small Quadrotor Chang Liu & Stephen D. Prior Faculty of Engineering and the Environment, University of Southampton,
Computationally Efficient Visual-inertial Sensor Fusion for GPS-denied Navigation on a Small Quadrotor Chang Liu & Stephen D. Prior Faculty of Engineering and the Environment, University of Southampton,
Rigorous Scan Data Adjustment for kinematic LIDAR systems
 Rigorous Scan Data Adjustment for kinematic LIDAR systems Paul Swatschina Riegl Laser Measurement Systems ELMF Amsterdam, The Netherlands 13 November 2013 www.riegl.com Contents why kinematic scan data
Rigorous Scan Data Adjustment for kinematic LIDAR systems Paul Swatschina Riegl Laser Measurement Systems ELMF Amsterdam, The Netherlands 13 November 2013 www.riegl.com Contents why kinematic scan data
Depth Camera for Mobile Devices
 Depth Camera for Mobile Devices Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Stereo Cameras Structured Light Cameras Time of Flight (ToF) Camera Inferring 3D Points Given we have
Depth Camera for Mobile Devices Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Stereo Cameras Structured Light Cameras Time of Flight (ToF) Camera Inferring 3D Points Given we have
Turning an Automated System into an Autonomous system using Model-Based Design Autonomous Tech Conference 2018
 Turning an Automated System into an Autonomous system using Model-Based Design Autonomous Tech Conference 2018 Asaf Moses Systematics Ltd., Technical Product Manager aviasafm@systematics.co.il 1 Autonomous
Turning an Automated System into an Autonomous system using Model-Based Design Autonomous Tech Conference 2018 Asaf Moses Systematics Ltd., Technical Product Manager aviasafm@systematics.co.il 1 Autonomous
Stable Vision-Aided Navigation for Large-Area Augmented Reality
 Stable Vision-Aided Navigation for Large-Area Augmented Reality Taragay Oskiper, Han-Pang Chiu, Zhiwei Zhu Supun Samarasekera, Rakesh Teddy Kumar Vision and Robotics Laboratory SRI-International Sarnoff,
Stable Vision-Aided Navigation for Large-Area Augmented Reality Taragay Oskiper, Han-Pang Chiu, Zhiwei Zhu Supun Samarasekera, Rakesh Teddy Kumar Vision and Robotics Laboratory SRI-International Sarnoff,
Sensor technology for mobile robots
 Laser application, vision application, sonar application and sensor fusion (6wasserf@informatik.uni-hamburg.de) Outline Introduction Mobile robots perception Definitions Sensor classification Sensor Performance
Laser application, vision application, sonar application and sensor fusion (6wasserf@informatik.uni-hamburg.de) Outline Introduction Mobile robots perception Definitions Sensor classification Sensor Performance
Autonomous Navigation for Flying Robots
 Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 3.2: Sensors Jürgen Sturm Technische Universität München Sensors IMUs (inertial measurement units) Accelerometers
Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 3.2: Sensors Jürgen Sturm Technische Universität München Sensors IMUs (inertial measurement units) Accelerometers
Introduction to Autonomous Mobile Robots
 Introduction to Autonomous Mobile Robots second edition Roland Siegwart, Illah R. Nourbakhsh, and Davide Scaramuzza The MIT Press Cambridge, Massachusetts London, England Contents Acknowledgments xiii
Introduction to Autonomous Mobile Robots second edition Roland Siegwart, Illah R. Nourbakhsh, and Davide Scaramuzza The MIT Press Cambridge, Massachusetts London, England Contents Acknowledgments xiii
Lost! Leveraging the Crowd for Probabilistic Visual Self-Localization
 Lost! Leveraging the Crowd for Probabilistic Visual Self-Localization Marcus A. Brubaker (Toyota Technological Institute at Chicago) Andreas Geiger (Karlsruhe Institute of Technology & MPI Tübingen) Raquel
Lost! Leveraging the Crowd for Probabilistic Visual Self-Localization Marcus A. Brubaker (Toyota Technological Institute at Chicago) Andreas Geiger (Karlsruhe Institute of Technology & MPI Tübingen) Raquel
Monocular Visual Odometry
 Elective in Robotics coordinator: Prof. Giuseppe Oriolo Monocular Visual Odometry (slides prepared by Luca Ricci) Monocular vs. Stereo: eamples from Nature Predator Predators eyes face forward. The field
Elective in Robotics coordinator: Prof. Giuseppe Oriolo Monocular Visual Odometry (slides prepared by Luca Ricci) Monocular vs. Stereo: eamples from Nature Predator Predators eyes face forward. The field
Augmented Reality, Advanced SLAM, Applications
 Augmented Reality, Advanced SLAM, Applications Prof. Didier Stricker & Dr. Alain Pagani alain.pagani@dfki.de Lecture 3D Computer Vision AR, SLAM, Applications 1 Introduction Previous lectures: Basics (camera,
Augmented Reality, Advanced SLAM, Applications Prof. Didier Stricker & Dr. Alain Pagani alain.pagani@dfki.de Lecture 3D Computer Vision AR, SLAM, Applications 1 Introduction Previous lectures: Basics (camera,
Low Cost solution for Pose Estimation of Quadrotor
 Low Cost solution for Pose Estimation of Quadrotor mangal@iitk.ac.in https://www.iitk.ac.in/aero/mangal/ Intelligent Guidance and Control Laboratory Indian Institute of Technology, Kanpur Mangal Kothari
Low Cost solution for Pose Estimation of Quadrotor mangal@iitk.ac.in https://www.iitk.ac.in/aero/mangal/ Intelligent Guidance and Control Laboratory Indian Institute of Technology, Kanpur Mangal Kothari
Outline Sensors. EE Sensors. H.I. Bozma. Electric Electronic Engineering Bogazici University. December 13, 2017
 Electric Electronic Engineering Bogazici University December 13, 2017 Absolute position measurement Outline Motion Odometry Inertial systems Environmental Tactile Proximity Sensing Ground-Based RF Beacons
Electric Electronic Engineering Bogazici University December 13, 2017 Absolute position measurement Outline Motion Odometry Inertial systems Environmental Tactile Proximity Sensing Ground-Based RF Beacons
Live Metric 3D Reconstruction on Mobile Phones ICCV 2013
 Live Metric 3D Reconstruction on Mobile Phones ICCV 2013 Main Contents 1. Target & Related Work 2. Main Features of This System 3. System Overview & Workflow 4. Detail of This System 5. Experiments 6.
Live Metric 3D Reconstruction on Mobile Phones ICCV 2013 Main Contents 1. Target & Related Work 2. Main Features of This System 3. System Overview & Workflow 4. Detail of This System 5. Experiments 6.
Marker Based Localization of a Quadrotor. Akshat Agarwal & Siddharth Tanwar
 Marker Based Localization of a Quadrotor Akshat Agarwal & Siddharth Tanwar Objective Introduction Objective: To implement a high level control pipeline on a quadrotor which could autonomously take-off,
Marker Based Localization of a Quadrotor Akshat Agarwal & Siddharth Tanwar Objective Introduction Objective: To implement a high level control pipeline on a quadrotor which could autonomously take-off,
InFuse: A Comprehensive Framework for Data Fusion in Space Robotics
 InFuse InFuse: A Comprehensive Framework for Data Fusion in Space Robotics June 20 th, 2017 Shashank Govindaraj (Space Applications Services, Belgium) Overview 1. Motivations & Objectives 2. InFuse within
InFuse InFuse: A Comprehensive Framework for Data Fusion in Space Robotics June 20 th, 2017 Shashank Govindaraj (Space Applications Services, Belgium) Overview 1. Motivations & Objectives 2. InFuse within
Direct Methods in Visual Odometry
 Direct Methods in Visual Odometry July 24, 2017 Direct Methods in Visual Odometry July 24, 2017 1 / 47 Motivation for using Visual Odometry Wheel odometry is affected by wheel slip More accurate compared
Direct Methods in Visual Odometry July 24, 2017 Direct Methods in Visual Odometry July 24, 2017 1 / 47 Motivation for using Visual Odometry Wheel odometry is affected by wheel slip More accurate compared
High-precision, consistent EKF-based visual-inertial odometry
 High-precision, consistent EKF-based visual-inertial odometry Mingyang Li and Anastasios I. Mourikis, IJRR 2013 Ao Li Introduction What is visual-inertial odometry (VIO)? The problem of motion tracking
High-precision, consistent EKF-based visual-inertial odometry Mingyang Li and Anastasios I. Mourikis, IJRR 2013 Ao Li Introduction What is visual-inertial odometry (VIO)? The problem of motion tracking
Outline. ETN-FPI Training School on Plenoptic Sensing
 Outline Introduction Part I: Basics of Mathematical Optimization Linear Least Squares Nonlinear Optimization Part II: Basics of Computer Vision Camera Model Multi-Camera Model Multi-Camera Calibration
Outline Introduction Part I: Basics of Mathematical Optimization Linear Least Squares Nonlinear Optimization Part II: Basics of Computer Vision Camera Model Multi-Camera Model Multi-Camera Calibration
OFERTA O120410PA CURRENT DATE 10/04//2012 VALID UNTIL 10/05/2012 SUMMIT XL
 OFERTA O120410PA CURRENT DATE 10/04//2012 VALID UNTIL 10/05/2012 SUMMIT XL CLIENT CLIENT: Gaitech REPRESENTANT: Andrew Pether MAIL: andyroojp@hotmail.com PRODUCT Introduction The SUMMIT XL has skid-steering
OFERTA O120410PA CURRENT DATE 10/04//2012 VALID UNTIL 10/05/2012 SUMMIT XL CLIENT CLIENT: Gaitech REPRESENTANT: Andrew Pether MAIL: andyroojp@hotmail.com PRODUCT Introduction The SUMMIT XL has skid-steering
Monocular Visual-Inertial SLAM. Shaojie Shen Assistant Professor, HKUST Director, HKUST-DJI Joint Innovation Laboratory
 Monocular Visual-Inertial SLAM Shaojie Shen Assistant Professor, HKUST Director, HKUST-DJI Joint Innovation Laboratory Why Monocular? Minimum structural requirements Widely available sensors Applications:
Monocular Visual-Inertial SLAM Shaojie Shen Assistant Professor, HKUST Director, HKUST-DJI Joint Innovation Laboratory Why Monocular? Minimum structural requirements Widely available sensors Applications:
Simultaneous Localization
 Simultaneous Localization and Mapping (SLAM) RSS Technical Lecture 16 April 9, 2012 Prof. Teller Text: Siegwart and Nourbakhsh S. 5.8 Navigation Overview Where am I? Where am I going? Localization Assumed
Simultaneous Localization and Mapping (SLAM) RSS Technical Lecture 16 April 9, 2012 Prof. Teller Text: Siegwart and Nourbakhsh S. 5.8 Navigation Overview Where am I? Where am I going? Localization Assumed
Motion estimation of unmanned marine vehicles Massimo Caccia
 Motion estimation of unmanned marine vehicles Massimo Caccia Consiglio Nazionale delle Ricerche Istituto di Studi sui Sistemi Intelligenti per l Automazione Via Amendola 122 D/O, 70126, Bari, Italy massimo.caccia@ge.issia.cnr.it
Motion estimation of unmanned marine vehicles Massimo Caccia Consiglio Nazionale delle Ricerche Istituto di Studi sui Sistemi Intelligenti per l Automazione Via Amendola 122 D/O, 70126, Bari, Italy massimo.caccia@ge.issia.cnr.it
Lecture: Autonomous micro aerial vehicles
 Lecture: Autonomous micro aerial vehicles Friedrich Fraundorfer Remote Sensing Technology TU München 1/41 Autonomous operation@eth Zürich Start 2/41 Autonomous operation@eth Zürich 3/41 Outline MAV system
Lecture: Autonomous micro aerial vehicles Friedrich Fraundorfer Remote Sensing Technology TU München 1/41 Autonomous operation@eth Zürich Start 2/41 Autonomous operation@eth Zürich 3/41 Outline MAV system
Lecture 19: Depth Cameras. Visual Computing Systems CMU , Fall 2013
 Lecture 19: Depth Cameras Visual Computing Systems Continuing theme: computational photography Cameras capture light, then extensive processing produces the desired image Today: - Capturing scene depth
Lecture 19: Depth Cameras Visual Computing Systems Continuing theme: computational photography Cameras capture light, then extensive processing produces the desired image Today: - Capturing scene depth
LOAM: LiDAR Odometry and Mapping in Real Time
 LOAM: LiDAR Odometry and Mapping in Real Time Aayush Dwivedi (14006), Akshay Sharma (14062), Mandeep Singh (14363) Indian Institute of Technology Kanpur 1 Abstract This project deals with online simultaneous
LOAM: LiDAR Odometry and Mapping in Real Time Aayush Dwivedi (14006), Akshay Sharma (14062), Mandeep Singh (14363) Indian Institute of Technology Kanpur 1 Abstract This project deals with online simultaneous
Ford Campus Vision and Laser Data Set
 1 Ford Campus Vision and Laser Data Set Gaurav Pandey*, Ryan Eustice* and James McBride** *University of Michigan, Ann Arbor, MI **Ford Motor Company Research, Dearborn, MI Abstract This paper describes
1 Ford Campus Vision and Laser Data Set Gaurav Pandey*, Ryan Eustice* and James McBride** *University of Michigan, Ann Arbor, MI **Ford Motor Company Research, Dearborn, MI Abstract This paper describes
Using infrared proximity sensors for close 2D localization and object size recognition. Richard Berglind Neonode
 Using infrared proximity sensors for close 2D localization and object size recognition Richard Berglind Neonode Outline Overview of sensor types IR proximity sensors and their drawbacks Principles of a
Using infrared proximity sensors for close 2D localization and object size recognition Richard Berglind Neonode Outline Overview of sensor types IR proximity sensors and their drawbacks Principles of a
Me 3-Axis Accelerometer and Gyro Sensor
 Me 3-Axis Accelerometer and Gyro Sensor SKU: 11012 Weight: 20.00 Gram Description: Me 3-Axis Accelerometer and Gyro Sensor is a motion processing module. It can use to measure the angular rate and the
Me 3-Axis Accelerometer and Gyro Sensor SKU: 11012 Weight: 20.00 Gram Description: Me 3-Axis Accelerometer and Gyro Sensor is a motion processing module. It can use to measure the angular rate and the
Vision-based navigation
 Vision-based navigation Simon Lacroix To cite this version: Simon Lacroix. Vision-based navigation. Doctoral. Spring School on Location-Based Services, École Nationale d Aviation Civile, Toulouse (France),
Vision-based navigation Simon Lacroix To cite this version: Simon Lacroix. Vision-based navigation. Doctoral. Spring School on Location-Based Services, École Nationale d Aviation Civile, Toulouse (France),
Data Association for SLAM
 CALIFORNIA INSTITUTE OF TECHNOLOGY ME/CS 132a, Winter 2011 Lab #2 Due: Mar 10th, 2011 Part I Data Association for SLAM 1 Introduction For this part, you will experiment with a simulation of an EKF SLAM
CALIFORNIA INSTITUTE OF TECHNOLOGY ME/CS 132a, Winter 2011 Lab #2 Due: Mar 10th, 2011 Part I Data Association for SLAM 1 Introduction For this part, you will experiment with a simulation of an EKF SLAM
Simultaneous Localization and Mapping (SLAM)
") Simultaneous Localization and Mapping (SLAM) RSS Lecture 16 April 8, 2013 Prof. Teller Text: Siegwart and Nourbakhsh S. 5.8 SLAM Problem Statement Inputs: No external coordinate reference Time series of
Simultaneous Localization and Mapping (SLAM) RSS Lecture 16 April 8, 2013 Prof. Teller Text: Siegwart and Nourbakhsh S. 5.8 SLAM Problem Statement Inputs: No external coordinate reference Time series of
E80. Experimental Engineering. Lecture 9 Inertial Measurement
 Lecture 9 Inertial Measurement http://www.volker-doormann.org/physics.htm Feb. 19, 2013 Christopher M. Clark Where is the rocket? Outline Sensors People Accelerometers Gyroscopes Representations State
Lecture 9 Inertial Measurement http://www.volker-doormann.org/physics.htm Feb. 19, 2013 Christopher M. Clark Where is the rocket? Outline Sensors People Accelerometers Gyroscopes Representations State
New Sony DepthSense TM ToF Technology
 ADVANCED MATERIAL HANDLING WITH New Sony DepthSense TM ToF Technology Jenson Chang Product Marketing November 7, 2018 1 3D SENSING APPLICATIONS Pick and Place Drones Collision Detection People Counting
ADVANCED MATERIAL HANDLING WITH New Sony DepthSense TM ToF Technology Jenson Chang Product Marketing November 7, 2018 1 3D SENSING APPLICATIONS Pick and Place Drones Collision Detection People Counting
Range Sensors (time of flight) (1)
 (1)") Range Sensors (time of flight) (1) Large range distance measurement -> called range sensors Range information: key element for localization and environment modeling Ultrasonic sensors, infra-red sensors
Range Sensors (time of flight) (1) Large range distance measurement -> called range sensors Range information: key element for localization and environment modeling Ultrasonic sensors, infra-red sensors
Basics of Localization, Mapping and SLAM. Jari Saarinen Aalto University Department of Automation and systems Technology
 Basics of Localization, Mapping and SLAM Jari Saarinen Aalto University Department of Automation and systems Technology Content Introduction to Problem (s) Localization A few basic equations Dead Reckoning
Basics of Localization, Mapping and SLAM Jari Saarinen Aalto University Department of Automation and systems Technology Content Introduction to Problem (s) Localization A few basic equations Dead Reckoning
Revising Stereo Vision Maps in Particle Filter Based SLAM using Localisation Confidence and Sample History
 Revising Stereo Vision Maps in Particle Filter Based SLAM using Localisation Confidence and Sample History Simon Thompson and Satoshi Kagami Digital Human Research Center National Institute of Advanced
Revising Stereo Vision Maps in Particle Filter Based SLAM using Localisation Confidence and Sample History Simon Thompson and Satoshi Kagami Digital Human Research Center National Institute of Advanced
IMU and Encoders. Team project Robocon 2016
 IMU and Encoders Team project Robocon 2016 Harsh Sinha, 14265, harshsin@iitk.ac.in Deepak Gangwar, 14208, dgangwar@iitk.ac.in Swati Gupta, 14742, swatig@iitk.ac.in March 17 th 2016 IMU and Encoders Module
IMU and Encoders Team project Robocon 2016 Harsh Sinha, 14265, harshsin@iitk.ac.in Deepak Gangwar, 14208, dgangwar@iitk.ac.in Swati Gupta, 14742, swatig@iitk.ac.in March 17 th 2016 IMU and Encoders Module
Solid-State Hybrid LiDAR for Autonomous Driving Product Description
 Solid-State Hybrid LiDAR for Autonomous Driving Product Description What is LiDAR Sensor Who is Using LiDARs How does LiDAR Work Hesai LiDAR Demo Features Terminologies Specifications What is LiDAR A LiDAR
Solid-State Hybrid LiDAR for Autonomous Driving Product Description What is LiDAR Sensor Who is Using LiDARs How does LiDAR Work Hesai LiDAR Demo Features Terminologies Specifications What is LiDAR A LiDAR
Collaboration is encouraged among small groups (e.g., 2-3 students).
.") Assignments Policies You must typeset, choices: Word (very easy to type math expressions) Latex (very easy to type math expressions) Google doc Plain text + math formula Your favorite text/doc editor Submit
Assignments Policies You must typeset, choices: Word (very easy to type math expressions) Latex (very easy to type math expressions) Google doc Plain text + math formula Your favorite text/doc editor Submit
Qadeer Baig, Mathias Perrollaz, Jander Botelho Do Nascimento, Christian Laugier
 Using Fast Classification of Static and Dynamic Environment for Improving Bayesian Occupancy Filter (BOF) and Tracking Qadeer Baig, Mathias Perrollaz, Jander Botelho Do Nascimento, Christian Laugier e-motion
Using Fast Classification of Static and Dynamic Environment for Improving Bayesian Occupancy Filter (BOF) and Tracking Qadeer Baig, Mathias Perrollaz, Jander Botelho Do Nascimento, Christian Laugier e-motion
CSE-571 Robotics. Sensors for Mobile Robots. Beam-based Sensor Model. Proximity Sensors. Probabilistic Sensor Models. Beam-based Scan-based Landmarks
 Sensors for Mobile Robots CSE-57 Robotics Probabilistic Sensor Models Beam-based Scan-based Landmarks Contact sensors: Bumpers Internal sensors Accelerometers (spring-mounted masses) Gyroscopes (spinning
Sensors for Mobile Robots CSE-57 Robotics Probabilistic Sensor Models Beam-based Scan-based Landmarks Contact sensors: Bumpers Internal sensors Accelerometers (spring-mounted masses) Gyroscopes (spinning
SLAM with SIFT (aka Mobile Robot Localization and Mapping with Uncertainty using Scale-Invariant Visual Landmarks ) Se, Lowe, and Little
 Se, Lowe, and Little") SLAM with SIFT (aka Mobile Robot Localization and Mapping with Uncertainty using Scale-Invariant Visual Landmarks ) Se, Lowe, and Little + Presented by Matt Loper CS296-3: Robot Learning and Autonomy Brown
SLAM with SIFT (aka Mobile Robot Localization and Mapping with Uncertainty using Scale-Invariant Visual Landmarks ) Se, Lowe, and Little + Presented by Matt Loper CS296-3: Robot Learning and Autonomy Brown
ECE276A: Sensing & Estimation in Robotics Lecture 11: Simultaneous Localization and Mapping using a Particle Filter
 ECE276A: Sensing & Estimation in Robotics Lecture 11: Simultaneous Localization and Mapping using a Particle Filter Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Siwei Guo: s9guo@eng.ucsd.edu
ECE276A: Sensing & Estimation in Robotics Lecture 11: Simultaneous Localization and Mapping using a Particle Filter Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Siwei Guo: s9guo@eng.ucsd.edu
Vision-based Mobile Robot Localization and Mapping using Scale-Invariant Features
 Vision-based Mobile Robot Localization and Mapping using Scale-Invariant Features Stephen Se, David Lowe, Jim Little Department of Computer Science University of British Columbia Presented by Adam Bickett
Vision-based Mobile Robot Localization and Mapping using Scale-Invariant Features Stephen Se, David Lowe, Jim Little Department of Computer Science University of British Columbia Presented by Adam Bickett
10/5/09 1. d = 2. Range Sensors (time of flight) (2) Ultrasonic Sensor (time of flight, sound) (1) Ultrasonic Sensor (time of flight, sound) (2) 4.1.
 (2) Ultrasonic Sensor (time of flight, sound) (1) Ultrasonic Sensor (time of flight, sound) (2) 4.1.") Range Sensors (time of flight) (1) Range Sensors (time of flight) (2) arge range distance measurement -> called range sensors Range information: key element for localization and environment modeling Ultrasonic
Range Sensors (time of flight) (1) Range Sensors (time of flight) (2) arge range distance measurement -> called range sensors Range information: key element for localization and environment modeling Ultrasonic
Geometric Stereo Increases Accuracy of Depth Estimations for an Unmanned Air Vehicle with a Small Baseline Stereo System
 Geometric Stereo Increases Accuracy of Depth Estimations for an Unmanned Air Vehicle with a Small Baseline Stereo System Eleanor Tursman (Grinnell College, Physics), SUNFEST Fellow Camillo Jose Taylor,
Geometric Stereo Increases Accuracy of Depth Estimations for an Unmanned Air Vehicle with a Small Baseline Stereo System Eleanor Tursman (Grinnell College, Physics), SUNFEST Fellow Camillo Jose Taylor,
Perception: Sensors. Autonomous Mobile Robots. Davide Scaramuzza Margarita Chli, Paul Furgale, Marco Hutter, Roland Siegwart
 ASL Autonomous Systems Lab Perception: Sensors Autonomous Mobile Robots Davide Scaramuzza Margarita Chli, Paul Furgale, Marco Hutter, Roland Siegwart Autonomous Mobile Robots Margarita Chli, Paul Furgale,
ASL Autonomous Systems Lab Perception: Sensors Autonomous Mobile Robots Davide Scaramuzza Margarita Chli, Paul Furgale, Marco Hutter, Roland Siegwart Autonomous Mobile Robots Margarita Chli, Paul Furgale,
BBR Progress Report 006: Autonomous 2-D Mapping of a Building Floor
 BBR Progress Report 006: Autonomous 2-D Mapping of a Building Floor Andy Sayler & Constantin Berzan November 30, 2010 Abstract In the past two weeks, we implemented and tested landmark extraction based
BBR Progress Report 006: Autonomous 2-D Mapping of a Building Floor Andy Sayler & Constantin Berzan November 30, 2010 Abstract In the past two weeks, we implemented and tested landmark extraction based
COMBINING MEMS-BASED IMU DATA AND VISION-BASED TRAJECTORY ESTIMATION
 COMBINING MEMS-BASED IMU DATA AND VISION-BASED TRAJECTORY ESTIMATION F. Tsai a*, H. Chang b and A. Y. S. Su c a Center for Space and Remote Sensing Research b Department of Civil Engineering c Research
COMBINING MEMS-BASED IMU DATA AND VISION-BASED TRAJECTORY ESTIMATION F. Tsai a*, H. Chang b and A. Y. S. Su c a Center for Space and Remote Sensing Research b Department of Civil Engineering c Research
EE565:Mobile Robotics Lecture 2
 EE565:Mobile Robotics Lecture 2 Welcome Dr. Ing. Ahmad Kamal Nasir Organization Lab Course Lab grading policy (40%) Attendance = 10 % In-Lab tasks = 30 % Lab assignment + viva = 60 % Make a group Either
EE565:Mobile Robotics Lecture 2 Welcome Dr. Ing. Ahmad Kamal Nasir Organization Lab Course Lab grading policy (40%) Attendance = 10 % In-Lab tasks = 30 % Lab assignment + viva = 60 % Make a group Either
Lecture 13 Visual Inertial Fusion
 Lecture 13 Visual Inertial Fusion Davide Scaramuzza Course Evaluation Please fill the evaluation form you received by email! Provide feedback on Exercises: good and bad Course: good and bad How to improve
Lecture 13 Visual Inertial Fusion Davide Scaramuzza Course Evaluation Please fill the evaluation form you received by email! Provide feedback on Exercises: good and bad Course: good and bad How to improve
Nonlinear State Estimation for Robotics and Computer Vision Applications: An Overview
 Nonlinear State Estimation for Robotics and Computer Vision Applications: An Overview Arun Das 05/09/2017 Arun Das Waterloo Autonomous Vehicles Lab Introduction What s in a name? Arun Das Waterloo Autonomous
Nonlinear State Estimation for Robotics and Computer Vision Applications: An Overview Arun Das 05/09/2017 Arun Das Waterloo Autonomous Vehicles Lab Introduction What s in a name? Arun Das Waterloo Autonomous
ECGR4161/5196 Lecture 6 June 9, 2011
 ECGR4161/5196 Lecture 6 June 9, 2011 YouTube Videos: http://www.youtube.com/watch?v=7hag6zgj78o&feature=p layer_embedded Micro Robotics Worlds smallest robot - Version 1 - "tank" Worlds smallest robot
ECGR4161/5196 Lecture 6 June 9, 2011 YouTube Videos: http://www.youtube.com/watch?v=7hag6zgj78o&feature=p layer_embedded Micro Robotics Worlds smallest robot - Version 1 - "tank" Worlds smallest robot
Vision-Based Navigation Solution for Autonomous Indoor Obstacle Avoidance Flight
 Vision-Based Navigation Solution for Autonomous Indoor Obstacle Avoidance Flight Kirill E. Shilov 1, Vladimir V. Afanasyev 2 and Pavel A. Samsonov 3 1 Moscow Institute of Physics and Technology (MIPT),
Vision-Based Navigation Solution for Autonomous Indoor Obstacle Avoidance Flight Kirill E. Shilov 1, Vladimir V. Afanasyev 2 and Pavel A. Samsonov 3 1 Moscow Institute of Physics and Technology (MIPT),
Autonomous Navigation for Flying Robots
 Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 7.2: Visual Odometry Jürgen Sturm Technische Universität München Cascaded Control Robot Trajectory 0.1 Hz Visual
Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 7.2: Visual Odometry Jürgen Sturm Technische Universität München Cascaded Control Robot Trajectory 0.1 Hz Visual
Autonomous navigation in industrial cluttered environments using embedded stereo-vision
 Autonomous navigation in industrial cluttered environments using embedded stereo-vision Julien Marzat ONERA Palaiseau Aerial Robotics workshop, Paris, 8-9 March 2017 1 Copernic Lab (ONERA Palaiseau) Research
Autonomous navigation in industrial cluttered environments using embedded stereo-vision Julien Marzat ONERA Palaiseau Aerial Robotics workshop, Paris, 8-9 March 2017 1 Copernic Lab (ONERA Palaiseau) Research
Dense Tracking and Mapping for Autonomous Quadrocopters. Jürgen Sturm
 Computer Vision Group Prof. Daniel Cremers Dense Tracking and Mapping for Autonomous Quadrocopters Jürgen Sturm Joint work with Frank Steinbrücker, Jakob Engel, Christian Kerl, Erik Bylow, and Daniel Cremers
Computer Vision Group Prof. Daniel Cremers Dense Tracking and Mapping for Autonomous Quadrocopters Jürgen Sturm Joint work with Frank Steinbrücker, Jakob Engel, Christian Kerl, Erik Bylow, and Daniel Cremers
A novel approach to motion tracking with wearable sensors based on Probabilistic Graphical Models
 A novel approach to motion tracking with wearable sensors based on Probabilistic Graphical Models Emanuele Ruffaldi Lorenzo Peppoloni Alessandro Filippeschi Carlo Alberto Avizzano 2014 IEEE International
A novel approach to motion tracking with wearable sensors based on Probabilistic Graphical Models Emanuele Ruffaldi Lorenzo Peppoloni Alessandro Filippeschi Carlo Alberto Avizzano 2014 IEEE International
Humanoid Robotics. Monte Carlo Localization. Maren Bennewitz
 Humanoid Robotics Monte Carlo Localization Maren Bennewitz 1 Basis Probability Rules (1) If x and y are independent: Bayes rule: Often written as: The denominator is a normalizing constant that ensures
Humanoid Robotics Monte Carlo Localization Maren Bennewitz 1 Basis Probability Rules (1) If x and y are independent: Bayes rule: Often written as: The denominator is a normalizing constant that ensures
3D Scanning. Qixing Huang Feb. 9 th Slide Credit: Yasutaka Furukawa
 3D Scanning Qixing Huang Feb. 9 th 2017 Slide Credit: Yasutaka Furukawa Geometry Reconstruction Pipeline This Lecture Depth Sensing ICP for Pair-wise Alignment Next Lecture Global Alignment Pairwise Multiple
3D Scanning Qixing Huang Feb. 9 th 2017 Slide Credit: Yasutaka Furukawa Geometry Reconstruction Pipeline This Lecture Depth Sensing ICP for Pair-wise Alignment Next Lecture Global Alignment Pairwise Multiple
Personal Navigation and Indoor Mapping: Performance Characterization of Kinect Sensor-based Trajectory Recovery
 Personal Navigation and Indoor Mapping: Performance Characterization of Kinect Sensor-based Trajectory Recovery 1 Charles TOTH, 1 Dorota BRZEZINSKA, USA 2 Allison KEALY, Australia, 3 Guenther RETSCHER,
Personal Navigation and Indoor Mapping: Performance Characterization of Kinect Sensor-based Trajectory Recovery 1 Charles TOTH, 1 Dorota BRZEZINSKA, USA 2 Allison KEALY, Australia, 3 Guenther RETSCHER,
Space Robotics. Ioannis Rekleitis
 Space Robotics Ioannis Rekleitis On-Orbit Servicing of Satellites Work done at the Canadian Space Agency Guy Rouleau, Ioannis Rekleitis, Régent L'Archevêque, Eric Martin, Kourosh Parsa, and Erick Dupuis
Space Robotics Ioannis Rekleitis On-Orbit Servicing of Satellites Work done at the Canadian Space Agency Guy Rouleau, Ioannis Rekleitis, Régent L'Archevêque, Eric Martin, Kourosh Parsa, and Erick Dupuis
H2020 Space Robotic SRC- OG4
 H2020 Space Robotic SRC- OG4 CCT/COMET ORB Workshop on Space Rendezvous 05/12/2017 «Smart Sensors for Smart Missions» Contacts: Sabrina Andiappane, sabrina.andiappane@thalesaleniaspace.com Vincent Dubanchet,
H2020 Space Robotic SRC- OG4 CCT/COMET ORB Workshop on Space Rendezvous 05/12/2017 «Smart Sensors for Smart Missions» Contacts: Sabrina Andiappane, sabrina.andiappane@thalesaleniaspace.com Vincent Dubanchet,
GPS + Inertial Sensor Fusion
 GPS + Inertial Sensor Fusion Senior Project Proposal Aleksey Lykov, William Tarpley, Anton Volkov Advisors: Dr. In Soo Ahn, Dr. Yufeng Lu Date: November 26, 2013 Project Summary The objective of this project
GPS + Inertial Sensor Fusion Senior Project Proposal Aleksey Lykov, William Tarpley, Anton Volkov Advisors: Dr. In Soo Ahn, Dr. Yufeng Lu Date: November 26, 2013 Project Summary The objective of this project
Visual Perception Sensors
 G. Glaser Visual Perception Sensors 1 / 27 MIN Faculty Department of Informatics Visual Perception Sensors Depth Determination Gerrit Glaser University of Hamburg Faculty of Mathematics, Informatics and
G. Glaser Visual Perception Sensors 1 / 27 MIN Faculty Department of Informatics Visual Perception Sensors Depth Determination Gerrit Glaser University of Hamburg Faculty of Mathematics, Informatics and
navigation Isaac Skog
 Foot-mounted zerovelocity aided inertial navigation Isaac Skog skog@kth.se Course Outline 1. Foot-mounted inertial navigation a. Basic idea b. Pros and cons 2. Inertial navigation a. The inertial sensors
Foot-mounted zerovelocity aided inertial navigation Isaac Skog skog@kth.se Course Outline 1. Foot-mounted inertial navigation a. Basic idea b. Pros and cons 2. Inertial navigation a. The inertial sensors
The AZUR project. Development of autonomous navigation software for urban operation of VTOL-type UAV. Yoko Watanabe
 The AZUR project Development of autonomous navigation software for urban operation of VTOL-type UAV Yoko Watanabe Dept. of Systems Control and Flight Dynalics (DCSD) MAVRC Garden Workshop 02/ 07 / 2015
The AZUR project Development of autonomous navigation software for urban operation of VTOL-type UAV Yoko Watanabe Dept. of Systems Control and Flight Dynalics (DCSD) MAVRC Garden Workshop 02/ 07 / 2015
3D Time-of-Flight Image Sensor Solutions for Mobile Devices
 3D Time-of-Flight Image Sensor Solutions for Mobile Devices SEMICON Europa 2015 Imaging Conference Bernd Buxbaum 2015 pmdtechnologies gmbh c o n f i d e n t i a l Content Introduction Motivation for 3D
3D Time-of-Flight Image Sensor Solutions for Mobile Devices SEMICON Europa 2015 Imaging Conference Bernd Buxbaum 2015 pmdtechnologies gmbh c o n f i d e n t i a l Content Introduction Motivation for 3D
Modelling and Simulation of the Autonomous Underwater Vehicle (AUV) Robot
 Robot") 21st International Congress on Modelling and Simulation, Gold Coast, Australia, 29 Nov to 4 Dec 2015 www.mssanz.org.au/modsim2015 Modelling and Simulation of the Autonomous Underwater Vehicle (AUV) Robot
21st International Congress on Modelling and Simulation, Gold Coast, Australia, 29 Nov to 4 Dec 2015 www.mssanz.org.au/modsim2015 Modelling and Simulation of the Autonomous Underwater Vehicle (AUV) Robot
Estimation of Altitude and Vertical Velocity for Multirotor Aerial Vehicle using Kalman Filter
 Estimation of Altitude and Vertical Velocity for Multirotor Aerial Vehicle using Kalman Filter Przemys law G asior, Stanis law Gardecki, Jaros law Gośliński and Wojciech Giernacki Poznan University of
Estimation of Altitude and Vertical Velocity for Multirotor Aerial Vehicle using Kalman Filter Przemys law G asior, Stanis law Gardecki, Jaros law Gośliński and Wojciech Giernacki Poznan University of
GPS denied Navigation Solutions
 GPS denied Navigation Solutions Krishnraj Singh Gaur and Mangal Kothari ksgaur@iitk.ac.in, mangal@iitk.ac.in https://www.iitk.ac.in/aero/mangal/ Intelligent Guidance and Control Laboratory Indian Institute
GPS denied Navigation Solutions Krishnraj Singh Gaur and Mangal Kothari ksgaur@iitk.ac.in, mangal@iitk.ac.in https://www.iitk.ac.in/aero/mangal/ Intelligent Guidance and Control Laboratory Indian Institute
New Technologies for UAV/UGV
 Qualcomm Research New Technologies for UAV/UGV Charles Bergan VP, Engineering Qualcomm Research Qualcomm Technologies, Inc. 2013-2016 QUALCOMM Incorporated and/or its subsidiaries. All rights reserved
Qualcomm Research New Technologies for UAV/UGV Charles Bergan VP, Engineering Qualcomm Research Qualcomm Technologies, Inc. 2013-2016 QUALCOMM Incorporated and/or its subsidiaries. All rights reserved
ME132 February 3, 2011
 ME132 February 3, 2011 Outline: - active sensors - introduction to lab setup (Player/Stage) - lab assignment - brief overview of OpenCV ME132 February 3, 2011 Outline: - active sensors - introduction to
ME132 February 3, 2011 Outline: - active sensors - introduction to lab setup (Player/Stage) - lab assignment - brief overview of OpenCV ME132 February 3, 2011 Outline: - active sensors - introduction to
DriftLess Technology to improve inertial sensors
 Slide 1 of 19 DriftLess Technology to improve inertial sensors Marcel Ruizenaar, TNO marcel.ruizenaar@tno.nl Slide 2 of 19 Topics Problem, Drift in INS due to bias DriftLess technology What is it How it
Slide 1 of 19 DriftLess Technology to improve inertial sensors Marcel Ruizenaar, TNO marcel.ruizenaar@tno.nl Slide 2 of 19 Topics Problem, Drift in INS due to bias DriftLess technology What is it How it
Actuated Sensor Networks: a 40-minute rant on convergence of vision, robotics, and sensor networks
 1 Actuated Sensor Networks: a 40-minute rant on convergence of vision, robotics, and sensor networks Chad Jenkins Assistant Professor Computer Science Department Brown University Women in Computer Science
1 Actuated Sensor Networks: a 40-minute rant on convergence of vision, robotics, and sensor networks Chad Jenkins Assistant Professor Computer Science Department Brown University Women in Computer Science
Depth Sensors Kinect V2 A. Fornaser
 Depth Sensors Kinect V2 A. Fornaser alberto.fornaser@unitn.it Vision Depth data It is not a 3D data, It is a map of distances Not a 3D, not a 2D it is a 2.5D or Perspective 3D Complete 3D - Tomography
Depth Sensors Kinect V2 A. Fornaser alberto.fornaser@unitn.it Vision Depth data It is not a 3D data, It is a map of distances Not a 3D, not a 2D it is a 2.5D or Perspective 3D Complete 3D - Tomography
Test Report iµvru. (excerpt) Commercial-in-Confidence. imar Navigation GmbH Im Reihersbruch 3 D St. Ingbert Germany.
 Commercial-in-Confidence. imar Navigation GmbH Im Reihersbruch 3 D St. Ingbert Germany.") 1 of 11 (excerpt) Commercial-in-Confidence imar Navigation GmbH Im Reihersbruch 3 D-66386 St. Ingbert Germany www.imar-navigation.de sales@imar-navigation.de 2 of 11 CHANGE RECORD Date Issue Paragraph
1 of 11 (excerpt) Commercial-in-Confidence imar Navigation GmbH Im Reihersbruch 3 D-66386 St. Ingbert Germany www.imar-navigation.de sales@imar-navigation.de 2 of 11 CHANGE RECORD Date Issue Paragraph
Stereo Rig Final Report
 Stereo Rig Final Report Yifei Zhang Abstract The ability to generate 3D images for the underwater environment offers researchers better insights by enabling them to record scenes for future analysis. The
Stereo Rig Final Report Yifei Zhang Abstract The ability to generate 3D images for the underwater environment offers researchers better insights by enabling them to record scenes for future analysis. The
Public Sensing Using Your Mobile Phone for Crowd Sourcing
 Institute of Parallel and Distributed Systems () Universitätsstraße 38 D-70569 Stuttgart Public Sensing Using Your Mobile Phone for Crowd Sourcing 55th Photogrammetric Week September 10, 2015 Stuttgart,
Institute of Parallel and Distributed Systems () Universitätsstraße 38 D-70569 Stuttgart Public Sensing Using Your Mobile Phone for Crowd Sourcing 55th Photogrammetric Week September 10, 2015 Stuttgart,
Indoor navigation using smartphones. Chris Hide IESSG, University of Nottingham, UK
 Indoor navigation using smartphones Chris Hide IESSG, University of Nottingham, UK Overview Smartphones Available sensors Current positioning methods Positioning research at IESSG 1. Wi-Fi fingerprinting
Indoor navigation using smartphones Chris Hide IESSG, University of Nottingham, UK Overview Smartphones Available sensors Current positioning methods Positioning research at IESSG 1. Wi-Fi fingerprinting
INTEGRATED TECH FOR INDUSTRIAL POSITIONING
 INTEGRATED TECH FOR INDUSTRIAL POSITIONING Integrated Tech for Industrial Positioning aerospace.honeywell.com 1 Introduction We are the world leader in precision IMU technology and have built the majority
INTEGRATED TECH FOR INDUSTRIAL POSITIONING Integrated Tech for Industrial Positioning aerospace.honeywell.com 1 Introduction We are the world leader in precision IMU technology and have built the majority
Localization of Autonomous Mobile Ground Vehicles in a Sterile Environment: A Survey
 Localization of Autonomous Mobile Ground Vehicles in a Sterile Environment: A Survey Aidan F. Browne, David Vutetakis The University of North Carolina at Charlotte Abstract A capstone design project required
Localization of Autonomous Mobile Ground Vehicles in a Sterile Environment: A Survey Aidan F. Browne, David Vutetakis The University of North Carolina at Charlotte Abstract A capstone design project required