Synchronization aspects of sensor and data fusion in a research multi-sensor-system
|
|
|
- Beverley Bryant
- 5 years ago
- Views:
Transcription
1 Synchronization aspects of sensor and data fusion in a research multi-sensor-system MCG 2016, Vichy, France 5 th International Conference on Machine Control & Guidance October 5, 2016 Jens-André Paffenholz, Johannes Bureick, Dmitri Diener, Johannes Link Geodätisches Institut, Leibniz Universität Hannover
2 Motivation What is common for multi-sensor-systems (MSS)? Superior goal: Efficient data capturing of the environment Object capturing sensors: w.l.o.g. laser scanner Referencing sensors: 3D positioning and navigation sensors Use benefits of each enlisted sensor What is essential for the MSS? 1) Availability of a proper time reference for the acquired sensor data 2) Mutual spatial relation of each enlisted sensor 2


![Harmening, 2014] [Nüchter et al.](/docs-images/92/110294713/images/3-3.jpg ", 2013] [ARTIS, research")
![project@gih, 2016] [Heinz et al.](/docs-images/92/110294713/images/3-4.jpg ", 2015] Remark: Commercial MSS are")

3 Selected (laser scanner based) multi-sensor-systems in the research community [Keller & Sternberg, 2013] [Paffenholz and Harmening, 2014] [Nüchter et al., 2013] [ARTIS, research 2016] [Heinz et al., 2015] Remark: Commercial MSS are in the portfolio of nearly each manufacturer of geodetic equipment, e.g. Leica, Riegl, Trimble 3
4 Outline The research multi-sensor-system Synchronization (temporal referencing) Common time reference by means of radio communication and GPS time Spatial referencing (registration) 6 dof calibration for a common spatial reference Data fusion Kalman Filtering for trajectory estimation Conclusion & Outlook 4


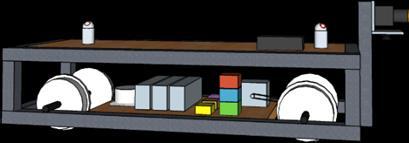

5 The research multi-sensor-system (RMSS) Small-scale vehicle (LxWxH 74x25x25 cm) Accelerated by means of a stepper motor Driving autonomously on a rail in an indoor laboratory 5





6 RMSS Referencing sensors Absolute position information prisms tracked by a robotic total station or a laser tracker TinkerForge IMU Brick 2.0 Acceleration, Magnetic, Angular Velocity Resolution Heading, Roll, Pitch Resolution Quaternion Resolution Sampling Rate Weight Current Consumption 14 bit, 16 bit, 16 bit steps 16 bit 100 Hz 12 g 415mW [ 2016] 6

![de, 2016] Profile laser scanner Hokuyo](/docs-images/92/110294713/images/7-2.jpg "UST-10LX Range 0.")


7 RMSS Object capturing sensors [ 2016] [ 2016] Profile laser scanner Hokuyo UST-10LX Range m Repeatability 30 mm Absolute uncertainty 40 mm Scan angle 270 Angle resolution 0.25 frequency 40 profiles/s Raspberry Pi camera module with wideangle lens Resolution Framerate 5 MP (2592 x 1944 px.) 15 fps Field of view 122 x




8 RMSS Control unit and coding Single-board computer of type Raspberry Pi (RPI) 2 Model B running Ubuntu LTS (Trusty Tahr) [ 7/2016] 8

9 Synchronization (temporal referencing) Synchronization (temporal referencing) Common time scale for different data sources Latency time due to imperfect synchronization Problem with RPI Drift of built-in clock Solution External clock source Radio communication DCF-77 GPS time [blog.remibergsma.com] 9
10 measurement values measurement values measurement values Establishment of temporal reference Methods of synchronization sensor 1 a) Clock-controlled registration sensor 2 sensor 3 b) Event-driven registration trigger time sensor 1 sensor 2 sensor 3 trigger time c) Event-based registration sensor 1 sensor 2 sensor 3 trigger time 10


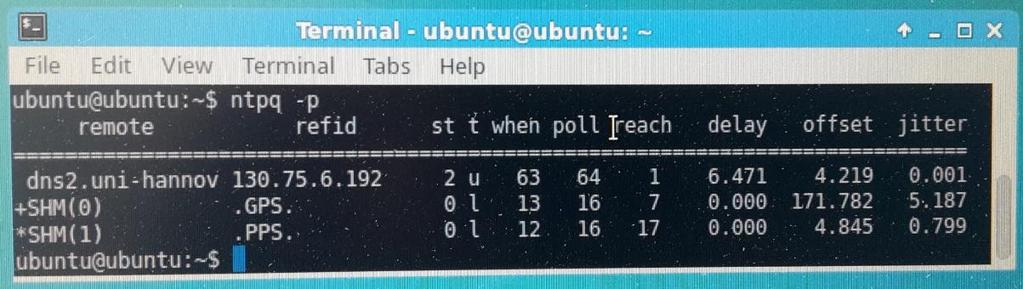
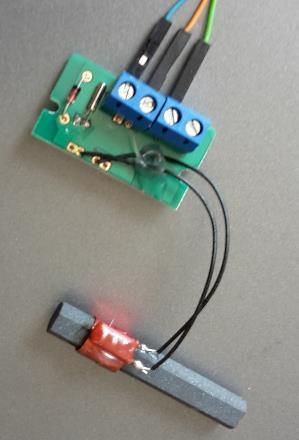
11 External clock sources Radio communication; DCF-77 GPS time introduced via GPIO pins of RPI 11

12 Spatial referencing (registration) Definition of RMSS coordinate system (body frame, BF) Sensor coordinate systems External tracking (prism) IMU Laser scanner System calibration to obtain the spatial reference Pose: position and orientation estimation of individual sensors in BF 12
 Reference geometry (RG) Approach according to Strübing & Neumann")
13 Spatial referencing (registration) Approach for pose estimation of laser scanner in BF Laser scanner (LS) Reference sensor of superior accuracy (LT) Reference geometry (RG) Approach according to Strübing & Neumann (2013) 13
14 Pose estimation of laser scanner in BF Functional relation (Gauß-Helmert model) x BF y BF z BF = t x t y t z + R x ω R y φ R z κ x LS y LS z LS w = n x x BF +n y y BF +n z z BF d Input: Laser scanner measurements [x LS, y LS, z LS ] to the RG-planes as observations Estimated plane parameters n x, n y, n z, d of the RG-planes measured with the reference sensor (here laser tracker) Output: 6 dof: translations t x, t y, t z and rotations ω, φ, κ of the laser scanner 14

 Spatial distribution of the planes Selected view of")
15 Spatial referencing (registration) Reference geometry (plane) configuration All parameter sensitive for light changes in the measured data Tricky for translation across scanning plane (parameter x) Spatial distribution of the planes Selected view of plane configuration 15
![misclosure vector w [mm] Spatial referencing (registration) Results of pose estimation Misclosure vector of the adjustment (w) Numerical results for parameter](/docs-images/92/110294713/images/16-1.jpg "Parameter x σ x x [mm] 710.52 0.85 y [mm] 96.79 0.23 z [mm] 63.73 0.16 ω [gon] -0.198 0.037 φ [gon] -1.798 0.086 κ [gon] +0.660 0.")
16 misclosure vector w [mm] Spatial referencing (registration) Results of pose estimation Misclosure vector of the adjustment (w) Numerical results for parameter Parameter x σ x x [mm] y [mm] z [mm] ω [gon] φ [gon] κ [gon] plane / point number [ ] 16
17 x (along track) [m] azimuthal orientation κ [gon] Data fusion of referencing sensors within a recursive state-space filter: Kalman filter State vector: Position, Orientation and Velocity of the RMSS Observation vector: IMU, tacheometer and Pseudo observations measured value predicted value filtered value κ derived from IMU κ supported by tacheometer position Pseudo observable - Tacheometer heading time (since start of RMSS) [s] y (across track) [m] 17


18 Resulting 3d point cloud of RMSS of indoor laboratory situation Colour scheme Z-value from blue to green Rail highlighted in red Deflected pixel area close to the rails in yellow 18

19 Conclusion & Outlook Conclusion Synchronization of different sensor data Spatial referencing: pose estimation of laser scanner Data fusion within Kalman filter Outlook Improvement of ROS-node implementation In-depth analysis of stratum-0 time server implementation on RPI 19


20 Thank you for your attention. Synchronization aspects of sensor and data fusion in a research multi-sensor-system Dr.-Ing. Jens-André Paffenholz, Johannes Bureick, M.Sc., Dmitri Diener, B.Sc., Johannes Link, B.Eng. Geodätisches Institut, Leibniz Universität Hannover paffenholz@gih.uni-hannover.de
Quality assurance and calibration tasks in the scope of multi-sensor systems
 Quality assurance and calibration tasks in the scope of multi-sensor systems FIG Working Week 2015 From the Wisdom of the Ages to the Challenges of the Modern World Sofia, May 19, 2015 Jens-André Paffenholz,
Quality assurance and calibration tasks in the scope of multi-sensor systems FIG Working Week 2015 From the Wisdom of the Ages to the Challenges of the Modern World Sofia, May 19, 2015 Jens-André Paffenholz,
Adaptive Extended Kalman Filter for Geo-Referencing of a TLS-based Multi-Sensor-System
 Adaptive Extended Kalman Filter for TLS-based Multi-Sensor-System TS 3D - Model Building and Data Analysis, Tuesday, 13 April 2010 Jens-André Paffenholz Hamza Alkhatib Geodetic Institute Leibniz Universität
Adaptive Extended Kalman Filter for TLS-based Multi-Sensor-System TS 3D - Model Building and Data Analysis, Tuesday, 13 April 2010 Jens-André Paffenholz Hamza Alkhatib Geodetic Institute Leibniz Universität
Development of a Test Field for the Calibration and Evaluation of Kinematic Multi Sensor Systems
 Development of a Test Field for the Calibration and Evaluation of Kinematic Multi Sensor Systems DGK-Doktorandenseminar Graz, Austria, 26 th April 2017 Erik Heinz Institute of Geodesy and Geoinformation
Development of a Test Field for the Calibration and Evaluation of Kinematic Multi Sensor Systems DGK-Doktorandenseminar Graz, Austria, 26 th April 2017 Erik Heinz Institute of Geodesy and Geoinformation
Development of a Portable Mobile Laser Scanning System with Special Focus on the System Calibration and Evaluation
 Development of a Portable Mobile Laser Scanning System with Special Focus on the System Calibration and Evaluation MCG 2016, Vichy, France, 5-6 th October Erik Heinz, Christian Eling, Markus Wieland, Lasse
Development of a Portable Mobile Laser Scanning System with Special Focus on the System Calibration and Evaluation MCG 2016, Vichy, France, 5-6 th October Erik Heinz, Christian Eling, Markus Wieland, Lasse
On the Tracking of a Laser Scanner for Geo-Referencing Tasks by Means of Geodetic Sensors
 On the Tracking of a Laser Scanner for Geo-Referencing Tasks by Means of Geodetic Sensors Jens-André Paffenholz 1, Sebastian Horst 1, Dr. Hamza Alkhatib 1, Prof. Dr. Hansjörg Kutterer 1 1 Geodetic Institute,
On the Tracking of a Laser Scanner for Geo-Referencing Tasks by Means of Geodetic Sensors Jens-André Paffenholz 1, Sebastian Horst 1, Dr. Hamza Alkhatib 1, Prof. Dr. Hansjörg Kutterer 1 1 Geodetic Institute,
Robust spatial approximation of laser scanner point clouds by means of free-form curve and surface approaches
 Robust spatial approximation of laser scanner point clouds by means of free-form curve and surface approaches IUGG, IAG Symposia 2015 G05 GNSS++: Emerging Technologies and Applications Prague, June 24,
Robust spatial approximation of laser scanner point clouds by means of free-form curve and surface approaches IUGG, IAG Symposia 2015 G05 GNSS++: Emerging Technologies and Applications Prague, June 24,
H. Kutterer, H. Alkhatib, J.-A. Paffenholz, H. Vennegeerts Geodätisches Institut, Leibniz Universität Hannover
 H. Kutterer, H. Alkhatib, J.-A. Paffenholz, H. Vennegeerts Geodätisches Institut, Leibniz Universität Hannover MONTE-CARLO SIMULATION OF PROFILE SCANS FROM KINEMATIC TLS FIG 2010 Congress, Sydney / Australia,
H. Kutterer, H. Alkhatib, J.-A. Paffenholz, H. Vennegeerts Geodätisches Institut, Leibniz Universität Hannover MONTE-CARLO SIMULATION OF PROFILE SCANS FROM KINEMATIC TLS FIG 2010 Congress, Sydney / Australia,
Analysis of Different Reference Plane Setups for the Calibration of a Mobile Laser Scanning System
 Analysis of Different Reference Plane Setups for the Calibration of a Mobile Laser Scanning System 18. Internationaler Ingenieurvermessungskurs Graz, Austria, 25-29 th April 2017 Erik Heinz, Christian
Analysis of Different Reference Plane Setups for the Calibration of a Mobile Laser Scanning System 18. Internationaler Ingenieurvermessungskurs Graz, Austria, 25-29 th April 2017 Erik Heinz, Christian
3D Point Cloud Processing
 3D Point Cloud Processing The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well as changes in intensity that give the robot a single
3D Point Cloud Processing The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well as changes in intensity that give the robot a single
E80. Experimental Engineering. Lecture 9 Inertial Measurement
 Lecture 9 Inertial Measurement http://www.volker-doormann.org/physics.htm Feb. 19, 2013 Christopher M. Clark Where is the rocket? Outline Sensors People Accelerometers Gyroscopes Representations State
Lecture 9 Inertial Measurement http://www.volker-doormann.org/physics.htm Feb. 19, 2013 Christopher M. Clark Where is the rocket? Outline Sensors People Accelerometers Gyroscopes Representations State
GPS denied Navigation Solutions
 GPS denied Navigation Solutions Krishnraj Singh Gaur and Mangal Kothari ksgaur@iitk.ac.in, mangal@iitk.ac.in https://www.iitk.ac.in/aero/mangal/ Intelligent Guidance and Control Laboratory Indian Institute
GPS denied Navigation Solutions Krishnraj Singh Gaur and Mangal Kothari ksgaur@iitk.ac.in, mangal@iitk.ac.in https://www.iitk.ac.in/aero/mangal/ Intelligent Guidance and Control Laboratory Indian Institute
Autonomous Mobile Robot Design
 Autonomous Mobile Robot Design Topic: EKF-based SLAM Dr. Kostas Alexis (CSE) These slides have partially relied on the course of C. Stachniss, Robot Mapping - WS 2013/14 Autonomous Robot Challenges Where
Autonomous Mobile Robot Design Topic: EKF-based SLAM Dr. Kostas Alexis (CSE) These slides have partially relied on the course of C. Stachniss, Robot Mapping - WS 2013/14 Autonomous Robot Challenges Where
OFERTA O120410PA CURRENT DATE 10/04//2012 VALID UNTIL 10/05/2012 SUMMIT XL
 OFERTA O120410PA CURRENT DATE 10/04//2012 VALID UNTIL 10/05/2012 SUMMIT XL CLIENT CLIENT: Gaitech REPRESENTANT: Andrew Pether MAIL: andyroojp@hotmail.com PRODUCT Introduction The SUMMIT XL has skid-steering
OFERTA O120410PA CURRENT DATE 10/04//2012 VALID UNTIL 10/05/2012 SUMMIT XL CLIENT CLIENT: Gaitech REPRESENTANT: Andrew Pether MAIL: andyroojp@hotmail.com PRODUCT Introduction The SUMMIT XL has skid-steering
High Frequency Terrestrial Laser Scans for Monitoring Kinematic Processes
 High Frequency Terrestrial Laser Scans for Monitoring Kinematic Processes Jens-André PAFFENHOLZ, Harald VENNEGEERTS and Hansjörg KUTTERER, Germany Key words: kinematic laser scanning, spatio-temporal resolution,
High Frequency Terrestrial Laser Scans for Monitoring Kinematic Processes Jens-André PAFFENHOLZ, Harald VENNEGEERTS and Hansjörg KUTTERER, Germany Key words: kinematic laser scanning, spatio-temporal resolution,
Camera Drones Lecture 2 Control and Sensors
 Camera Drones Lecture 2 Control and Sensors Ass.Prof. Friedrich Fraundorfer WS 2017 1 Outline Quadrotor control principles Sensors 2 Quadrotor control - Hovering Hovering means quadrotor needs to hold
Camera Drones Lecture 2 Control and Sensors Ass.Prof. Friedrich Fraundorfer WS 2017 1 Outline Quadrotor control principles Sensors 2 Quadrotor control - Hovering Hovering means quadrotor needs to hold
Geometric Accuracy Investigations of the Latest Terrestrial Laser Scanning Systems
 Thomas Kersten, Klaus Mechelke, Maren Lindstaedt, Harald Sternberg Geometric Accuracy Investigations of the Latest Terrestrial Laser Scanning Systems Outline of presentation Introduction Laser scanning
Thomas Kersten, Klaus Mechelke, Maren Lindstaedt, Harald Sternberg Geometric Accuracy Investigations of the Latest Terrestrial Laser Scanning Systems Outline of presentation Introduction Laser scanning
Low Cost solution for Pose Estimation of Quadrotor
 Low Cost solution for Pose Estimation of Quadrotor mangal@iitk.ac.in https://www.iitk.ac.in/aero/mangal/ Intelligent Guidance and Control Laboratory Indian Institute of Technology, Kanpur Mangal Kothari
Low Cost solution for Pose Estimation of Quadrotor mangal@iitk.ac.in https://www.iitk.ac.in/aero/mangal/ Intelligent Guidance and Control Laboratory Indian Institute of Technology, Kanpur Mangal Kothari
Selection and Integration of Sensors Alex Spitzer 11/23/14
 Selection and Integration of Sensors Alex Spitzer aes368@cornell.edu 11/23/14 Sensors Perception of the outside world Cameras, DVL, Sonar, Pressure Accelerometers, Gyroscopes, Magnetometers Position vs
Selection and Integration of Sensors Alex Spitzer aes368@cornell.edu 11/23/14 Sensors Perception of the outside world Cameras, DVL, Sonar, Pressure Accelerometers, Gyroscopes, Magnetometers Position vs
Evaluating the Performance of a Vehicle Pose Measurement System
 Evaluating the Performance of a Vehicle Pose Measurement System Harry Scott Sandor Szabo National Institute of Standards and Technology Abstract A method is presented for evaluating the performance of
Evaluating the Performance of a Vehicle Pose Measurement System Harry Scott Sandor Szabo National Institute of Standards and Technology Abstract A method is presented for evaluating the performance of
Nonlinear State Estimation for Robotics and Computer Vision Applications: An Overview
 Nonlinear State Estimation for Robotics and Computer Vision Applications: An Overview Arun Das 05/09/2017 Arun Das Waterloo Autonomous Vehicles Lab Introduction What s in a name? Arun Das Waterloo Autonomous
Nonlinear State Estimation for Robotics and Computer Vision Applications: An Overview Arun Das 05/09/2017 Arun Das Waterloo Autonomous Vehicles Lab Introduction What s in a name? Arun Das Waterloo Autonomous
Sensor Fusion: Potential, Challenges and Applications. Presented by KVH Industries and Geodetics, Inc. December 2016
 Sensor Fusion: Potential, Challenges and Applications Presented by KVH Industries and Geodetics, Inc. December 2016 1 KVH Industries Overview Innovative technology company 600 employees worldwide Focused
Sensor Fusion: Potential, Challenges and Applications Presented by KVH Industries and Geodetics, Inc. December 2016 1 KVH Industries Overview Innovative technology company 600 employees worldwide Focused
MULTI-MODAL MAPPING. Robotics Day, 31 Mar Frank Mascarich, Shehryar Khattak, Tung Dang
 MULTI-MODAL MAPPING Robotics Day, 31 Mar 2017 Frank Mascarich, Shehryar Khattak, Tung Dang Application-Specific Sensors Cameras TOF Cameras PERCEPTION LiDAR IMU Localization Mapping Autonomy Robotic Perception
MULTI-MODAL MAPPING Robotics Day, 31 Mar 2017 Frank Mascarich, Shehryar Khattak, Tung Dang Application-Specific Sensors Cameras TOF Cameras PERCEPTION LiDAR IMU Localization Mapping Autonomy Robotic Perception
The Applanix Approach to GPS/INS Integration
 Lithopoulos 53 The Applanix Approach to GPS/INS Integration ERIK LITHOPOULOS, Markham ABSTRACT The Position and Orientation System for Direct Georeferencing (POS/DG) is an off-the-shelf integrated GPS/inertial
Lithopoulos 53 The Applanix Approach to GPS/INS Integration ERIK LITHOPOULOS, Markham ABSTRACT The Position and Orientation System for Direct Georeferencing (POS/DG) is an off-the-shelf integrated GPS/inertial
Towards Optimal 3D Point Clouds
 By Andreas Nüchter, Jan Elseberg and Dorit Borrmann, Germany feature Automation in 3D Mobile Laser Scanning Towards Optimal 3D Point Clouds Motivated by the increasing need for rapid characterisation of
By Andreas Nüchter, Jan Elseberg and Dorit Borrmann, Germany feature Automation in 3D Mobile Laser Scanning Towards Optimal 3D Point Clouds Motivated by the increasing need for rapid characterisation of
Investigating the Applicability of Standard Software Packages for Laser Scanner Based Deformation Analyses
 Investigating the Applicability of Standard Software Packages for Laser Scanner Based Deformation Analyses Presented at the FIG Working Week 2017, May 29 - June 2, 2017 in Helsinki, Finland FIG Working
Investigating the Applicability of Standard Software Packages for Laser Scanner Based Deformation Analyses Presented at the FIG Working Week 2017, May 29 - June 2, 2017 in Helsinki, Finland FIG Working
Field-of-view dependent registration of point clouds and incremental segmentation of table-tops using time-offlight
 Field-of-view dependent registration of point clouds and incremental segmentation of table-tops using time-offlight cameras Dipl.-Ing. Georg Arbeiter Fraunhofer Institute for Manufacturing Engineering
Field-of-view dependent registration of point clouds and incremental segmentation of table-tops using time-offlight cameras Dipl.-Ing. Georg Arbeiter Fraunhofer Institute for Manufacturing Engineering
Large-Scale. Point Cloud Processing Tutorial. Application: Mobile Mapping
 Large-Scale 3D Point Cloud Processing Tutorial 2013 Application: Mobile Mapping The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well
Large-Scale 3D Point Cloud Processing Tutorial 2013 Application: Mobile Mapping The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well
EE631 Cooperating Autonomous Mobile Robots
 EE631 Cooperating Autonomous Mobile Robots Lecture: Multi-Robot Motion Planning Prof. Yi Guo ECE Department Plan Introduction Premises and Problem Statement A Multi-Robot Motion Planning Algorithm Implementation
EE631 Cooperating Autonomous Mobile Robots Lecture: Multi-Robot Motion Planning Prof. Yi Guo ECE Department Plan Introduction Premises and Problem Statement A Multi-Robot Motion Planning Algorithm Implementation
GPS + Inertial Sensor Fusion
 GPS + Inertial Sensor Fusion Senior Project Proposal Aleksey Lykov, William Tarpley, Anton Volkov Advisors: Dr. In Soo Ahn, Dr. Yufeng Lu Date: November 26, 2013 Project Summary The objective of this project
GPS + Inertial Sensor Fusion Senior Project Proposal Aleksey Lykov, William Tarpley, Anton Volkov Advisors: Dr. In Soo Ahn, Dr. Yufeng Lu Date: November 26, 2013 Project Summary The objective of this project
Autonomous Navigation for Flying Robots
 Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 3.2: Sensors Jürgen Sturm Technische Universität München Sensors IMUs (inertial measurement units) Accelerometers
Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 3.2: Sensors Jürgen Sturm Technische Universität München Sensors IMUs (inertial measurement units) Accelerometers
Construction and Calibration of a Low-Cost 3D Laser Scanner with 360º Field of View for Mobile Robots
 Construction and Calibration of a Low-Cost 3D Laser Scanner with 360º Field of View for Mobile Robots Jorge L. Martínez, Jesús Morales, Antonio, J. Reina, Anthony Mandow, Alejandro Pequeño-Boter*, and
Construction and Calibration of a Low-Cost 3D Laser Scanner with 360º Field of View for Mobile Robots Jorge L. Martínez, Jesús Morales, Antonio, J. Reina, Anthony Mandow, Alejandro Pequeño-Boter*, and
Stable Vision-Aided Navigation for Large-Area Augmented Reality
 Stable Vision-Aided Navigation for Large-Area Augmented Reality Taragay Oskiper, Han-Pang Chiu, Zhiwei Zhu Supun Samarasekera, Rakesh Teddy Kumar Vision and Robotics Laboratory SRI-International Sarnoff,
Stable Vision-Aided Navigation for Large-Area Augmented Reality Taragay Oskiper, Han-Pang Chiu, Zhiwei Zhu Supun Samarasekera, Rakesh Teddy Kumar Vision and Robotics Laboratory SRI-International Sarnoff,
Rigorous Scan Data Adjustment for kinematic LIDAR systems
 Rigorous Scan Data Adjustment for kinematic LIDAR systems Paul Swatschina Riegl Laser Measurement Systems ELMF Amsterdam, The Netherlands 13 November 2013 www.riegl.com Contents why kinematic scan data
Rigorous Scan Data Adjustment for kinematic LIDAR systems Paul Swatschina Riegl Laser Measurement Systems ELMF Amsterdam, The Netherlands 13 November 2013 www.riegl.com Contents why kinematic scan data
3D Laser Range Finder Topological sensor gathering spatial data from the surrounding environment
 Initial Project and Group Identification Document September 19, 2013 3D Laser Range Finder Topological sensor gathering spatial data from the surrounding environment Christian Conrose Jonathan Ulrich Andrew
Initial Project and Group Identification Document September 19, 2013 3D Laser Range Finder Topological sensor gathering spatial data from the surrounding environment Christian Conrose Jonathan Ulrich Andrew
Camera and Inertial Sensor Fusion
 January 6, 2018 For First Robotics 2018 Camera and Inertial Sensor Fusion David Zhang david.chao.zhang@gmail.com Version 4.1 1 My Background Ph.D. of Physics - Penn State Univ. Research scientist at SRI
January 6, 2018 For First Robotics 2018 Camera and Inertial Sensor Fusion David Zhang david.chao.zhang@gmail.com Version 4.1 1 My Background Ph.D. of Physics - Penn State Univ. Research scientist at SRI
A General Framework for Mobile Robot Pose Tracking and Multi Sensors Self-Calibration
 A General Framework for Mobile Robot Pose Tracking and Multi Sensors Self-Calibration Davide Cucci, Matteo Matteucci {cucci, matteucci}@elet.polimi.it Dipartimento di Elettronica, Informazione e Bioingegneria,
A General Framework for Mobile Robot Pose Tracking and Multi Sensors Self-Calibration Davide Cucci, Matteo Matteucci {cucci, matteucci}@elet.polimi.it Dipartimento di Elettronica, Informazione e Bioingegneria,
SpatialFuser. Offers support for GNSS and INS navigation systems. Supports multiple remote sensing equipment configurations.
 SPATIALFUSER SpatialFuser SpatialFuser is designed to georeference data acquired by our LiDAR mapping systems into common mapping formats such as LAS/LAZ or GPX. The main purpose of SpatialFuser is to
SPATIALFUSER SpatialFuser SpatialFuser is designed to georeference data acquired by our LiDAR mapping systems into common mapping formats such as LAS/LAZ or GPX. The main purpose of SpatialFuser is to
Robot Localization based on Geo-referenced Images and G raphic Methods
 Robot Localization based on Geo-referenced Images and G raphic Methods Sid Ahmed Berrabah Mechanical Department, Royal Military School, Belgium, sidahmed.berrabah@rma.ac.be Janusz Bedkowski, Łukasz Lubasiński,
Robot Localization based on Geo-referenced Images and G raphic Methods Sid Ahmed Berrabah Mechanical Department, Royal Military School, Belgium, sidahmed.berrabah@rma.ac.be Janusz Bedkowski, Łukasz Lubasiński,
Error Simulation and Multi-Sensor Data Fusion
 Error Simulation and Multi-Sensor Data Fusion AERO4701 Space Engineering 3 Week 6 Last Week Looked at the problem of attitude determination for satellites Examined several common methods such as inertial
Error Simulation and Multi-Sensor Data Fusion AERO4701 Space Engineering 3 Week 6 Last Week Looked at the problem of attitude determination for satellites Examined several common methods such as inertial
W4. Perception & Situation Awareness & Decision making
 W4. Perception & Situation Awareness & Decision making Robot Perception for Dynamic environments: Outline & DP-Grids concept Dynamic Probabilistic Grids Bayesian Occupancy Filter concept Dynamic Probabilistic
W4. Perception & Situation Awareness & Decision making Robot Perception for Dynamic environments: Outline & DP-Grids concept Dynamic Probabilistic Grids Bayesian Occupancy Filter concept Dynamic Probabilistic
EE565:Mobile Robotics Lecture 3
 EE565:Mobile Robotics Lecture 3 Welcome Dr. Ahmad Kamal Nasir Today s Objectives Motion Models Velocity based model (Dead-Reckoning) Odometry based model (Wheel Encoders) Sensor Models Beam model of range
EE565:Mobile Robotics Lecture 3 Welcome Dr. Ahmad Kamal Nasir Today s Objectives Motion Models Velocity based model (Dead-Reckoning) Odometry based model (Wheel Encoders) Sensor Models Beam model of range
LOAM: LiDAR Odometry and Mapping in Real Time
 LOAM: LiDAR Odometry and Mapping in Real Time Aayush Dwivedi (14006), Akshay Sharma (14062), Mandeep Singh (14363) Indian Institute of Technology Kanpur 1 Abstract This project deals with online simultaneous
LOAM: LiDAR Odometry and Mapping in Real Time Aayush Dwivedi (14006), Akshay Sharma (14062), Mandeep Singh (14363) Indian Institute of Technology Kanpur 1 Abstract This project deals with online simultaneous
Positioning and Synchronization of Industrial Robots
 First published in: 2 International Conference on Indoor Positioning and Indoor Navigation (IPIN), 5-7 September 2, Zürich, Switzerland Positioning and Synchronization of Industrial Robots Christoph Herrmann
First published in: 2 International Conference on Indoor Positioning and Indoor Navigation (IPIN), 5-7 September 2, Zürich, Switzerland Positioning and Synchronization of Industrial Robots Christoph Herrmann
POME A mobile camera system for accurate indoor pose
 POME A mobile camera system for accurate indoor pose Paul Montgomery & Andreas Winter November 2 2016 2010. All rights reserved. 1 ICT Intelligent Construction Tools A 50-50 joint venture between Trimble
POME A mobile camera system for accurate indoor pose Paul Montgomery & Andreas Winter November 2 2016 2010. All rights reserved. 1 ICT Intelligent Construction Tools A 50-50 joint venture between Trimble
Data Association for SLAM
 CALIFORNIA INSTITUTE OF TECHNOLOGY ME/CS 132a, Winter 2011 Lab #2 Due: Mar 10th, 2011 Part I Data Association for SLAM 1 Introduction For this part, you will experiment with a simulation of an EKF SLAM
CALIFORNIA INSTITUTE OF TECHNOLOGY ME/CS 132a, Winter 2011 Lab #2 Due: Mar 10th, 2011 Part I Data Association for SLAM 1 Introduction For this part, you will experiment with a simulation of an EKF SLAM
3D Laserscanner App for Indoor Measurements
 3D Laserscanner App for Indoor Measurements V&R Vision & Robotics GmbH Prof. Dr.-Ing. Dietrich Paulus, Dipl.-Inform. Johannes Pellenz info@vision-robotics.de 20. April 2011 vr 3D Laserscanner App for Indoor
3D Laserscanner App for Indoor Measurements V&R Vision & Robotics GmbH Prof. Dr.-Ing. Dietrich Paulus, Dipl.-Inform. Johannes Pellenz info@vision-robotics.de 20. April 2011 vr 3D Laserscanner App for Indoor
A Comparison of Laser Scanners for Mobile Mapping Applications
 A Comparison of Laser Scanners for Mobile Mapping Applications Craig Glennie 1, Jerry Dueitt 2 1 Department of Civil & Environmental Engineering The University of Houston 3605 Cullen Boulevard, Room 2008
A Comparison of Laser Scanners for Mobile Mapping Applications Craig Glennie 1, Jerry Dueitt 2 1 Department of Civil & Environmental Engineering The University of Houston 3605 Cullen Boulevard, Room 2008
Satellite Attitude Determination
 Satellite Attitude Determination AERO4701 Space Engineering 3 Week 5 Last Week Looked at GPS signals and pseudorange error terms Looked at GPS positioning from pseudorange data Looked at GPS error sources,
Satellite Attitude Determination AERO4701 Space Engineering 3 Week 5 Last Week Looked at GPS signals and pseudorange error terms Looked at GPS positioning from pseudorange data Looked at GPS error sources,
Lecture: Autonomous micro aerial vehicles
 Lecture: Autonomous micro aerial vehicles Friedrich Fraundorfer Remote Sensing Technology TU München 1/41 Autonomous operation@eth Zürich Start 2/41 Autonomous operation@eth Zürich 3/41 Outline MAV system
Lecture: Autonomous micro aerial vehicles Friedrich Fraundorfer Remote Sensing Technology TU München 1/41 Autonomous operation@eth Zürich Start 2/41 Autonomous operation@eth Zürich 3/41 Outline MAV system
Using Particle Image Velocimetry for Road Vehicle Tracking and Performance Monitoring. Samuel C. Kucera Jeremy S. Daily
 Using Particle Image Velocimetry for Road Vehicle Tracking and Performance Monitoring Samuel C. Kucera Jeremy S. Daily SAE World Congress Detroit, MI April 13, 2011 Outline Purpose Mathematics Mathematical
Using Particle Image Velocimetry for Road Vehicle Tracking and Performance Monitoring Samuel C. Kucera Jeremy S. Daily SAE World Congress Detroit, MI April 13, 2011 Outline Purpose Mathematics Mathematical
Distributed Vision-Aided Cooperative Navigation Based on Three-View Geometry
 Distributed Vision-Aided Cooperative Navigation Based on hree-view Geometry Vadim Indelman, Pini Gurfil Distributed Space Systems Lab, Aerospace Engineering, echnion Ehud Rivlin Computer Science, echnion
Distributed Vision-Aided Cooperative Navigation Based on hree-view Geometry Vadim Indelman, Pini Gurfil Distributed Space Systems Lab, Aerospace Engineering, echnion Ehud Rivlin Computer Science, echnion
Estimation of elevation dependent deformations of a parabolic reflector of a large radio telescope
 . Estimation of elevation dependent deformations of a parabolic reflector of a large radio telescope 1 Christoph Holst & Heiner Kuhlmann JISDM, 2-4 November 2011, Hong Kong, China . Motivation Laser Scanner
. Estimation of elevation dependent deformations of a parabolic reflector of a large radio telescope 1 Christoph Holst & Heiner Kuhlmann JISDM, 2-4 November 2011, Hong Kong, China . Motivation Laser Scanner
Autonomous Navigation for Flying Robots
 Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 3.1: 3D Geometry Jürgen Sturm Technische Universität München Points in 3D 3D point Augmented vector Homogeneous
Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 3.1: 3D Geometry Jürgen Sturm Technische Universität München Points in 3D 3D point Augmented vector Homogeneous
Motion estimation of unmanned marine vehicles Massimo Caccia
 Motion estimation of unmanned marine vehicles Massimo Caccia Consiglio Nazionale delle Ricerche Istituto di Studi sui Sistemi Intelligenti per l Automazione Via Amendola 122 D/O, 70126, Bari, Italy massimo.caccia@ge.issia.cnr.it
Motion estimation of unmanned marine vehicles Massimo Caccia Consiglio Nazionale delle Ricerche Istituto di Studi sui Sistemi Intelligenti per l Automazione Via Amendola 122 D/O, 70126, Bari, Italy massimo.caccia@ge.issia.cnr.it
Final Exam Practice Fall Semester, 2012
 COS 495 - Autonomous Robot Navigation Final Exam Practice Fall Semester, 2012 Duration: Total Marks: 70 Closed Book 2 hours Start Time: End Time: By signing this exam, I agree to the honor code Name: Signature:
COS 495 - Autonomous Robot Navigation Final Exam Practice Fall Semester, 2012 Duration: Total Marks: 70 Closed Book 2 hours Start Time: End Time: By signing this exam, I agree to the honor code Name: Signature:
Mixed-Reality for Intuitive Photo-Realistic 3D-Model Generation
 Mixed-Reality for Intuitive Photo-Realistic 3D-Model Generation Wolfgang Sepp, Tim Bodenmueller, Michael Suppa, and Gerd Hirzinger DLR, Institut für Robotik und Mechatronik @ GI-Workshop VR/AR 2009 Folie
Mixed-Reality for Intuitive Photo-Realistic 3D-Model Generation Wolfgang Sepp, Tim Bodenmueller, Michael Suppa, and Gerd Hirzinger DLR, Institut für Robotik und Mechatronik @ GI-Workshop VR/AR 2009 Folie
Dealing with Scale. Stephan Weiss Computer Vision Group NASA-JPL / CalTech
 Dealing with Scale Stephan Weiss Computer Vision Group NASA-JPL / CalTech Stephan.Weiss@ieee.org (c) 2013. Government sponsorship acknowledged. Outline Why care about size? The IMU as scale provider: The
Dealing with Scale Stephan Weiss Computer Vision Group NASA-JPL / CalTech Stephan.Weiss@ieee.org (c) 2013. Government sponsorship acknowledged. Outline Why care about size? The IMU as scale provider: The
Runway Centerline Deviation Estimation from Point Clouds using LiDAR imagery
 Runway Centerline Deviation Estimation from Point Clouds using LiDAR imagery Seth Young 1, Charles Toth 2, Zoltan Koppanyi 2 1 Department of Civil, Environmental and Geodetic Engineering The Ohio State
Runway Centerline Deviation Estimation from Point Clouds using LiDAR imagery Seth Young 1, Charles Toth 2, Zoltan Koppanyi 2 1 Department of Civil, Environmental and Geodetic Engineering The Ohio State
Incremental Real-time Bundle Adjustment for Multi-camera Systems with Points at Infinity
 Incremental Real-time Bundle Adjustment for Multi-camera Systems with Points at Infinity Johannes Schneider, Thomas Läbe, Wolfgang Förstner 1 Department of Photogrammetry Institute of Geodesy and Geoinformation
Incremental Real-time Bundle Adjustment for Multi-camera Systems with Points at Infinity Johannes Schneider, Thomas Läbe, Wolfgang Förstner 1 Department of Photogrammetry Institute of Geodesy and Geoinformation
DESIGN OF AN INDOOR MAPPING SYSTEM USING THREE 2D LASER SCANNERS AND 6 DOF SLAM
 DESIGN OF AN INDOOR MAPPING SYSTEM USING THREE 2D LASER SCANNERS AND 6 DOF SLAM George Vosselman University of Twente, Faculty ITC, Enschede, the Netherlands george.vosselman@utwente.nl KEY WORDS: localisation,
DESIGN OF AN INDOOR MAPPING SYSTEM USING THREE 2D LASER SCANNERS AND 6 DOF SLAM George Vosselman University of Twente, Faculty ITC, Enschede, the Netherlands george.vosselman@utwente.nl KEY WORDS: localisation,
Trimble Engineering & Construction Group, 5475 Kellenburger Road, Dayton, OH , USA
 Trimble VISION Ken Joyce Martin Koehler Michael Vogel Trimble Engineering and Construction Group Westminster, Colorado, USA April 2012 Trimble Engineering & Construction Group, 5475 Kellenburger Road,
Trimble VISION Ken Joyce Martin Koehler Michael Vogel Trimble Engineering and Construction Group Westminster, Colorado, USA April 2012 Trimble Engineering & Construction Group, 5475 Kellenburger Road,
5MP Global Shutter. High Dynamic Range Global Shutter CMOS Sensor
 High Dynamic Range Global Shutter CMOS Sensor 5MP Global Shutter 1. Background CMOS Image sensors with a global shutter (GS) are ideal for a variety of applications including factory automation, unmanned
High Dynamic Range Global Shutter CMOS Sensor 5MP Global Shutter 1. Background CMOS Image sensors with a global shutter (GS) are ideal for a variety of applications including factory automation, unmanned
Direct geo-referencing of a static terrestrial laser scanner
 Journal of Applied Geodesy 4 (2010), 115 126 6 de Gruyter 2010. DOI 10.1515/JAG.2010.011 Direct geo-referencing of a static terrestrial laser scanner Jens-André Pa enholz, Hamza Alkhatib and Hansjörg Kutterer
Journal of Applied Geodesy 4 (2010), 115 126 6 de Gruyter 2010. DOI 10.1515/JAG.2010.011 Direct geo-referencing of a static terrestrial laser scanner Jens-André Pa enholz, Hamza Alkhatib and Hansjörg Kutterer
Vehicle Localization. Hannah Rae Kerner 21 April 2015
 Vehicle Localization Hannah Rae Kerner 21 April 2015 Spotted in Mtn View: Google Car Why precision localization? in order for a robot to follow a road, it needs to know where the road is to stay in a particular
Vehicle Localization Hannah Rae Kerner 21 April 2015 Spotted in Mtn View: Google Car Why precision localization? in order for a robot to follow a road, it needs to know where the road is to stay in a particular
TEST RESULTS OF A GPS/INERTIAL NAVIGATION SYSTEM USING A LOW COST MEMS IMU
 TEST RESULTS OF A GPS/INERTIAL NAVIGATION SYSTEM USING A LOW COST MEMS IMU Alison K. Brown, Ph.D.* NAVSYS Corporation, 1496 Woodcarver Road, Colorado Springs, CO 891 USA, e-mail: abrown@navsys.com Abstract
TEST RESULTS OF A GPS/INERTIAL NAVIGATION SYSTEM USING A LOW COST MEMS IMU Alison K. Brown, Ph.D.* NAVSYS Corporation, 1496 Woodcarver Road, Colorado Springs, CO 891 USA, e-mail: abrown@navsys.com Abstract
Chapters 1 9: Overview
 Chapters 1 9: Overview Chapter 1: Introduction Chapters 2 4: Data acquisition Chapters 5 9: Data manipulation Chapter 5: Vertical imagery Chapter 6: Image coordinate measurements and refinements Chapters
Chapters 1 9: Overview Chapter 1: Introduction Chapters 2 4: Data acquisition Chapters 5 9: Data manipulation Chapter 5: Vertical imagery Chapter 6: Image coordinate measurements and refinements Chapters
Monocular Visual-Inertial SLAM. Shaojie Shen Assistant Professor, HKUST Director, HKUST-DJI Joint Innovation Laboratory
 Monocular Visual-Inertial SLAM Shaojie Shen Assistant Professor, HKUST Director, HKUST-DJI Joint Innovation Laboratory Why Monocular? Minimum structural requirements Widely available sensors Applications:
Monocular Visual-Inertial SLAM Shaojie Shen Assistant Professor, HKUST Director, HKUST-DJI Joint Innovation Laboratory Why Monocular? Minimum structural requirements Widely available sensors Applications:
Roll angle in 6DOF tracking. CMSC Charlotte-Concord, July 2008
 Roll angle in 6DOF tracking CMSC Charlotte-Concord, July 2008 Author: Stephen Kyle Senior honorary research fellow, University College London Honorary research fellow, Coventry University Presenter: Steven
Roll angle in 6DOF tracking CMSC Charlotte-Concord, July 2008 Author: Stephen Kyle Senior honorary research fellow, University College London Honorary research fellow, Coventry University Presenter: Steven
Tightly-Integrated Visual and Inertial Navigation for Pinpoint Landing on Rugged Terrains
 Tightly-Integrated Visual and Inertial Navigation for Pinpoint Landing on Rugged Terrains PhD student: Jeff DELAUNE ONERA Director: Guy LE BESNERAIS ONERA Advisors: Jean-Loup FARGES Clément BOURDARIAS
Tightly-Integrated Visual and Inertial Navigation for Pinpoint Landing on Rugged Terrains PhD student: Jeff DELAUNE ONERA Director: Guy LE BESNERAIS ONERA Advisors: Jean-Loup FARGES Clément BOURDARIAS
Optimized Design of 3D Laser Triangulation Systems
 The Scan Principle of 3D Laser Triangulation Triangulation Geometry Example of Setup Z Y X Target as seen from the Camera Sensor Image of Laser Line The Scan Principle of 3D Laser Triangulation Detektion
The Scan Principle of 3D Laser Triangulation Triangulation Geometry Example of Setup Z Y X Target as seen from the Camera Sensor Image of Laser Line The Scan Principle of 3D Laser Triangulation Detektion
AUTOMATED MEASUREMENT SYSTEM FOR CRANE RAIL GEOMETRY DETERMINATION
 AUTOMATED MEASUREMENT SYSTEM FOR CRANE RAIL GEOMETRY DETERMINATION Peter Kyrinovič Slovak University of Technology, Bratislava, Slovakia peter.kyrinovic@stuba.sk Alojz Kopáčik Slovak University of Technology,
AUTOMATED MEASUREMENT SYSTEM FOR CRANE RAIL GEOMETRY DETERMINATION Peter Kyrinovič Slovak University of Technology, Bratislava, Slovakia peter.kyrinovic@stuba.sk Alojz Kopáčik Slovak University of Technology,
Freestyle 3D. Features and applications. Dr. Daniel Döring Team Lead Product Development Freestyle 1
 Freestyle 3D Features and applications Dr. Daniel Döring Team Lead Product Development Freestyle 1 3D scanning Building works: How to record data? How to check what has been built? How to fit in new parts?
Freestyle 3D Features and applications Dr. Daniel Döring Team Lead Product Development Freestyle 1 3D scanning Building works: How to record data? How to check what has been built? How to fit in new parts?
3D Maps. Prof. Dr. Andreas Nüchter Jacobs University Bremen Campus Ring Bremen 1
 Towards Semantic 3D Maps Prof. Dr. Andreas Nüchter Jacobs University Bremen Campus Ring 1 28759 Bremen 1 Acknowledgements I would like to thank the following researchers for joint work and inspiration
Towards Semantic 3D Maps Prof. Dr. Andreas Nüchter Jacobs University Bremen Campus Ring 1 28759 Bremen 1 Acknowledgements I would like to thank the following researchers for joint work and inspiration
Dynamic Sensor-based Path Planning and Hostile Target Detection with Mobile Ground Robots. Matt Epperson Dr. Timothy Chung
 Dynamic Sensor-based Path Planning and Hostile Target Detection with Mobile Ground Robots Matt Epperson Dr. Timothy Chung Brief Bio Matt Epperson Cal Poly, San Luis Obispo Sophmore Computer Engineer NREIP
Dynamic Sensor-based Path Planning and Hostile Target Detection with Mobile Ground Robots Matt Epperson Dr. Timothy Chung Brief Bio Matt Epperson Cal Poly, San Luis Obispo Sophmore Computer Engineer NREIP
Aided-inertial for GPS-denied Navigation and Mapping
 Aided-inertial for GPS-denied Navigation and Mapping Erik Lithopoulos Applanix Corporation 85 Leek Crescent, Richmond Ontario, Canada L4B 3B3 elithopoulos@applanix.com ABSTRACT This paper describes the
Aided-inertial for GPS-denied Navigation and Mapping Erik Lithopoulos Applanix Corporation 85 Leek Crescent, Richmond Ontario, Canada L4B 3B3 elithopoulos@applanix.com ABSTRACT This paper describes the
Spring 2016 :: :: Robot Autonomy :: Team 7 Motion Planning for Autonomous All-Terrain Vehicle
 Spring 2016 :: 16662 :: Robot Autonomy :: Team 7 Motion Planning for Autonomous All-Terrain Vehicle Guan-Horng Liu, Samuel Wang, Shu-Kai Lin, Chris Wang, Tiffany May Advisor : Mr. George Kantor OUTLINE
Spring 2016 :: 16662 :: Robot Autonomy :: Team 7 Motion Planning for Autonomous All-Terrain Vehicle Guan-Horng Liu, Samuel Wang, Shu-Kai Lin, Chris Wang, Tiffany May Advisor : Mr. George Kantor OUTLINE
Pattern Recognition for Autonomous. Pattern Recognition for Autonomous. Driving. Freie Universität t Berlin. Raul Rojas
 Pattern Recognition for Autonomous Pattern Recognition for Autonomous Driving Raul Rojas Freie Universität t Berlin FU Berlin Berlin 3d model from Berlin Partner Freie Universitaet Berlin Outline of the
Pattern Recognition for Autonomous Pattern Recognition for Autonomous Driving Raul Rojas Freie Universität t Berlin FU Berlin Berlin 3d model from Berlin Partner Freie Universitaet Berlin Outline of the
Egomotion Estimation by Point-Cloud Back-Mapping
 Egomotion Estimation by Point-Cloud Back-Mapping Haokun Geng, Radu Nicolescu, and Reinhard Klette Department of Computer Science, University of Auckland, New Zealand hgen001@aucklanduni.ac.nz Abstract.
Egomotion Estimation by Point-Cloud Back-Mapping Haokun Geng, Radu Nicolescu, and Reinhard Klette Department of Computer Science, University of Auckland, New Zealand hgen001@aucklanduni.ac.nz Abstract.
Indoor navigation using smartphones. Chris Hide IESSG, University of Nottingham, UK
 Indoor navigation using smartphones Chris Hide IESSG, University of Nottingham, UK Overview Smartphones Available sensors Current positioning methods Positioning research at IESSG 1. Wi-Fi fingerprinting
Indoor navigation using smartphones Chris Hide IESSG, University of Nottingham, UK Overview Smartphones Available sensors Current positioning methods Positioning research at IESSG 1. Wi-Fi fingerprinting
Camera Parameters Estimation from Hand-labelled Sun Sositions in Image Sequences
 Camera Parameters Estimation from Hand-labelled Sun Sositions in Image Sequences Jean-François Lalonde, Srinivasa G. Narasimhan and Alexei A. Efros {jlalonde,srinivas,efros}@cs.cmu.edu CMU-RI-TR-8-32 July
Camera Parameters Estimation from Hand-labelled Sun Sositions in Image Sequences Jean-François Lalonde, Srinivasa G. Narasimhan and Alexei A. Efros {jlalonde,srinivas,efros}@cs.cmu.edu CMU-RI-TR-8-32 July
Calibration of a rotating multi-beam Lidar
 The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Calibration of a rotating multi-beam Lidar Naveed Muhammad 1,2 and Simon Lacroix 1,2 Abstract
The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Calibration of a rotating multi-beam Lidar Naveed Muhammad 1,2 and Simon Lacroix 1,2 Abstract
Autonomous Navigation for Flying Robots
 Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 7.2: Visual Odometry Jürgen Sturm Technische Universität München Cascaded Control Robot Trajectory 0.1 Hz Visual
Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 7.2: Visual Odometry Jürgen Sturm Technische Universität München Cascaded Control Robot Trajectory 0.1 Hz Visual
Pi HAT Sensor Board TM
 Pi HAT Sensor Board TM Gumstix, Inc. shall have no liability of any kind, express or implied, arising out of the use of the Information in this document, including direct, indirect, special or consequential
Pi HAT Sensor Board TM Gumstix, Inc. shall have no liability of any kind, express or implied, arising out of the use of the Information in this document, including direct, indirect, special or consequential
James Van Rens CEO Riegl USA, Inc. Mining Industry and UAV s combined with LIDAR Commercial UAV Las Vegas October 2015 James Van Rens CEO Riegl USA
 James Van Rens CEO Riegl USA, Inc. Mining Industry and UAV s combined with LIDAR Commercial UAV Las Vegas October 2015 James Van Rens CEO Riegl USA COST EFFECIENCY CONTINUUM LIDAR and IMU Partnership Technology
James Van Rens CEO Riegl USA, Inc. Mining Industry and UAV s combined with LIDAR Commercial UAV Las Vegas October 2015 James Van Rens CEO Riegl USA COST EFFECIENCY CONTINUUM LIDAR and IMU Partnership Technology
Re: Developing Requirements for Mobile LiDAR Data (#1015)
") TM Tech Notes Certainty 3D April 10, 2012 To: General Release From: Ted Knaak Certainty 3D, Inc. Re: Developing Requirements for Mobile LiDAR Data (#1015) Introduction Recent discussions within the industry
TM Tech Notes Certainty 3D April 10, 2012 To: General Release From: Ted Knaak Certainty 3D, Inc. Re: Developing Requirements for Mobile LiDAR Data (#1015) Introduction Recent discussions within the industry
Lost! Leveraging the Crowd for Probabilistic Visual Self-Localization
 Lost! Leveraging the Crowd for Probabilistic Visual Self-Localization Marcus A. Brubaker (Toyota Technological Institute at Chicago) Andreas Geiger (Karlsruhe Institute of Technology & MPI Tübingen) Raquel
Lost! Leveraging the Crowd for Probabilistic Visual Self-Localization Marcus A. Brubaker (Toyota Technological Institute at Chicago) Andreas Geiger (Karlsruhe Institute of Technology & MPI Tübingen) Raquel
ifp Universität Stuttgart Performance of IGI AEROcontrol-IId GPS/Inertial System Final Report
 Universität Stuttgart Performance of IGI AEROcontrol-IId GPS/Inertial System Final Report Institute for Photogrammetry (ifp) University of Stuttgart ifp Geschwister-Scholl-Str. 24 D M. Cramer: Final report
Universität Stuttgart Performance of IGI AEROcontrol-IId GPS/Inertial System Final Report Institute for Photogrammetry (ifp) University of Stuttgart ifp Geschwister-Scholl-Str. 24 D M. Cramer: Final report
Visual-Inertial Localization and Mapping for Robot Navigation
 Visual-Inertial Localization and Mapping for Robot Navigation Dr. Guillermo Gallego Robotics & Perception Group University of Zurich Davide Scaramuzza University of Zurich - http://rpg.ifi.uzh.ch Mocular,
Visual-Inertial Localization and Mapping for Robot Navigation Dr. Guillermo Gallego Robotics & Perception Group University of Zurich Davide Scaramuzza University of Zurich - http://rpg.ifi.uzh.ch Mocular,
New Technologies For The Real 3D Reference Point Determination
 New Technologies For The Real 3D Reference Point Determination Maria Hennes, Cornelia Eschelbach GIK, Geodetic Institute of the University of Karlsruhe, Germany Contact author: Maria Hennes, e-mail: hennes@gik.uni-karlsruhe.de
New Technologies For The Real 3D Reference Point Determination Maria Hennes, Cornelia Eschelbach GIK, Geodetic Institute of the University of Karlsruhe, Germany Contact author: Maria Hennes, e-mail: hennes@gik.uni-karlsruhe.de
EE565:Mobile Robotics Lecture 2
 EE565:Mobile Robotics Lecture 2 Welcome Dr. Ing. Ahmad Kamal Nasir Organization Lab Course Lab grading policy (40%) Attendance = 10 % In-Lab tasks = 30 % Lab assignment + viva = 60 % Make a group Either
EE565:Mobile Robotics Lecture 2 Welcome Dr. Ing. Ahmad Kamal Nasir Organization Lab Course Lab grading policy (40%) Attendance = 10 % In-Lab tasks = 30 % Lab assignment + viva = 60 % Make a group Either
Localization Refinement for Indoor Modeling System Using Lasers and Images
 Localization Refinement for Indoor Modeling System Using Lasers and Images Overview Matthew Carlberg (carlberg@eecsberkeleyedu) Avideh Zakhor (avz@eecsberkeleyedu) Video and Image Processing Laboratory
Localization Refinement for Indoor Modeling System Using Lasers and Images Overview Matthew Carlberg (carlberg@eecsberkeleyedu) Avideh Zakhor (avz@eecsberkeleyedu) Video and Image Processing Laboratory
NAVIGATION SYSTEM OF AN OUTDOOR SERVICE ROBOT WITH HYBRID LOCOMOTION SYSTEM
 NAVIGATION SYSTEM OF AN OUTDOOR SERVICE ROBOT WITH HYBRID LOCOMOTION SYSTEM Jorma Selkäinaho, Aarne Halme and Janne Paanajärvi Automation Technology Laboratory, Helsinki University of Technology, Espoo,
NAVIGATION SYSTEM OF AN OUTDOOR SERVICE ROBOT WITH HYBRID LOCOMOTION SYSTEM Jorma Selkäinaho, Aarne Halme and Janne Paanajärvi Automation Technology Laboratory, Helsinki University of Technology, Espoo,
Exterior Orientation Parameters
 Exterior Orientation Parameters PERS 12/2001 pp 1321-1332 Karsten Jacobsen, Institute for Photogrammetry and GeoInformation, University of Hannover, Germany The georeference of any photogrammetric product
Exterior Orientation Parameters PERS 12/2001 pp 1321-1332 Karsten Jacobsen, Institute for Photogrammetry and GeoInformation, University of Hannover, Germany The georeference of any photogrammetric product
Simplified Orientation Determination in Ski Jumping using Inertial Sensor Data
 Simplified Orientation Determination in Ski Jumping using Inertial Sensor Data B.H. Groh 1, N. Weeger 1, F. Warschun 2, B.M. Eskofier 1 1 Digital Sports Group, Pattern Recognition Lab University of Erlangen-Nürnberg
Simplified Orientation Determination in Ski Jumping using Inertial Sensor Data B.H. Groh 1, N. Weeger 1, F. Warschun 2, B.M. Eskofier 1 1 Digital Sports Group, Pattern Recognition Lab University of Erlangen-Nürnberg
Development of a Ground Based Cooperating Spacecraft Testbed for Research and Education
 DIPARTIMENTO DI INGEGNERIA INDUSTRIALE Development of a Ground Based Cooperating Spacecraft Testbed for Research and Education Mattia Mazzucato, Sergio Tronco, Andrea Valmorbida, Fabio Scibona and Enrico
DIPARTIMENTO DI INGEGNERIA INDUSTRIALE Development of a Ground Based Cooperating Spacecraft Testbed for Research and Education Mattia Mazzucato, Sergio Tronco, Andrea Valmorbida, Fabio Scibona and Enrico
Pose Estimation and Control of Micro-Air Vehicles
 Pose Estimation and Control of Micro-Air Vehicles IVAN DRYANOVSKI, Ph.D. Candidate, Computer Science ROBERTO G. VALENTI, Ph.D. Candidate, Electrical Engineering Mentor: JIZHONG XIAO, Professor, Electrical
Pose Estimation and Control of Micro-Air Vehicles IVAN DRYANOVSKI, Ph.D. Candidate, Computer Science ROBERTO G. VALENTI, Ph.D. Candidate, Electrical Engineering Mentor: JIZHONG XIAO, Professor, Electrical
New Sony DepthSense TM ToF Technology
 ADVANCED MATERIAL HANDLING WITH New Sony DepthSense TM ToF Technology Jenson Chang Product Marketing November 7, 2018 1 3D SENSING APPLICATIONS Pick and Place Drones Collision Detection People Counting
ADVANCED MATERIAL HANDLING WITH New Sony DepthSense TM ToF Technology Jenson Chang Product Marketing November 7, 2018 1 3D SENSING APPLICATIONS Pick and Place Drones Collision Detection People Counting
UAV Autonomous Navigation in a GPS-limited Urban Environment
 UAV Autonomous Navigation in a GPS-limited Urban Environment Yoko Watanabe DCSD/CDIN JSO-Aerial Robotics 2014/10/02-03 Introduction 2 Global objective Development of a UAV onboard system to maintain flight
UAV Autonomous Navigation in a GPS-limited Urban Environment Yoko Watanabe DCSD/CDIN JSO-Aerial Robotics 2014/10/02-03 Introduction 2 Global objective Development of a UAV onboard system to maintain flight
Personal Navigation and Indoor Mapping: Performance Characterization of Kinect Sensor-based Trajectory Recovery
 Personal Navigation and Indoor Mapping: Performance Characterization of Kinect Sensor-based Trajectory Recovery 1 Charles TOTH, 1 Dorota BRZEZINSKA, USA 2 Allison KEALY, Australia, 3 Guenther RETSCHER,
Personal Navigation and Indoor Mapping: Performance Characterization of Kinect Sensor-based Trajectory Recovery 1 Charles TOTH, 1 Dorota BRZEZINSKA, USA 2 Allison KEALY, Australia, 3 Guenther RETSCHER,
Emerging Vision Technologies: Enabling a New Era of Intelligent Devices
 Emerging Vision Technologies: Enabling a New Era of Intelligent Devices Computer vision overview Computer vision is being integrated in our daily lives Acquiring, processing, and understanding visual data
Emerging Vision Technologies: Enabling a New Era of Intelligent Devices Computer vision overview Computer vision is being integrated in our daily lives Acquiring, processing, and understanding visual data