DIT411/TIN175, Artificial Intelligence. Peter Ljunglöf. 19 January, 2018
|
|
|
- Sharleen Carson
- 5 years ago
- Views:
Transcription
1 DIT411/TIN175, Artificial Intelligence Chapter 3: Classical search algorithms CHAPTER 3: CLASSICAL SEARCH ALGORITHMS DIT411/TIN175, Artificial Intelligence Peter Ljunglöf 19 January,
2 DEADLINE FOR FORMING GROUPS Today is the deadline for forming groups. if you have any problems, please talk to me in the break e.g., if you cannot contact one of your group members or if you don t have a group yet Don t forget to create a Github team and clone the Shrdlite repository then me with information about your group Today we will decide your exact supervision time and your supervisor 2
3 TABLE OF CONTENTS Introduction (R&N ) Graphs and searching Example problems A generic searching algorithm Uninformed search (R&N 3.4) Depth-first search Breadth-first search Uniform-cost search Uniform-cost search Heuristic search (R&N ) Greedy best-first search A* search Admissible and consistent heuristics 3
4 INTRODUCTION (R&N ) GRAPHS AND SEARCHING EXAMPLE PROBLEMS A GENERIC SEARCHING ALGORITHM 4
5 GRAPHS AND SEARCHING O en we are not given an algorithm to solve a problem, but only a specification of a solution we have to search for it. A typical problem is when the agent is in one state, it has a set of deterministic actions it can carry out, and wants to get to a goal state. Many AI problems can be abstracted into the problem of finding a path in a directed graph. O en there is more than one way to represent a problem as a graph. 5
6 STATE-SPACE SEARCH: COMPLEXITY DIMENSIONS Observable? Deterministic? Episodic? Static? Discrete? N:o of agents fully deterministic episodic static discrete single Most complex problems (partly observable, stochastic, sequential) usualy have components using state-space search. 6
7 DIRECTED GRAPHS A graph consists of a set N of nodes and a set A of ordered pairs of nodes, called arcs or edges. Node n 2 is a neighbor of n 1 if there is an arc from n 1 to n 2. That is, if ( n 1, n 2 ) A. A path is a sequence of nodes ( n 0, n 1,, n k ) such that (, ) A. The length of path ( n 0, n 1,, n k ) is k. A solution is a path from a start node to a goal node, given a set of start nodes and goal nodes. (Russel & Norvig sometimes call the graph nodes states). n i 1 n i 7
8 EXAMPLE: TRAVEL IN ROMANIA We want to drive from Arad to Bucharest in Romania 8
9 EXAMPLE: GRID GAME Grid game: Rob needs to collect coins C 1, C 2, C 3, C 4, without running out of fuel, and end up at location (1,1): What is a good representation of the search states and the goal? 9

10 EXAMPLE: VACUUM-CLEANING AGENT States [room A dirty?, room B dirty?, robot location] Initial state any state Actions le, right, suck, do-nothing Goal test [false, false, ] 10
11 EXAMPLE: THE 8-PUZZLE States a 3 x 3 matrix of integers Initial state any state Actions move the blank space: le, right, up, down Goal test equal to the goal state 11
12 EXAMPLE: THE 8-QUEENS PROBLEM States Initial state Actions Goal test any arrangement of 0 to 8 queens on the board no queens on the board add a queen to any empty square 8 queens on the board, none attacked This gives us possible paths to explore! 12

13 EXAMPLE: THE 8-QUEENS PROBLEM (ALTERNATIVE) States Initial state Actions Goal test one queen per column in le most columns, none attacked no queens on the board add a queen to a square in the le most empty column, make sure that no queen is attacked 8 queens on the board, none attacked Using this formulation, we have only 2,057 paths! 13
14 EXAMPLE: KNUTH S CONJECTURE Donald Knuth conjectured that all positive integers can be obtained by starting with the number 4 and applying some combination of the factorial, square root, and floor. States Initial state 4 Actions (4!)! algebraic numbers apply factorial, square root, or floor operation Goal test a given positive integer (e.g., 5) = (1, 2.5, 9,, 1.23,, ) 14

15 EXAMPLE: ROBOTIC ASSEMBLY States Actions Goal test real-valued coordinates of robot joint angles parts of the object to be assembled continuous motions of robot joints complete assembly of the object 15
16 HOW DO WE SEARCH IN A GRAPH? A generic search algorithm: Given a graph, start nodes, and a goal description, incrementally explore paths from the start nodes. Maintain a frontier of nodes that are to be explored. As search proceeds, the frontier expands into the unexplored nodes until a goal node is encountered. The way in which the frontier is expanded defines the search strategy. 16
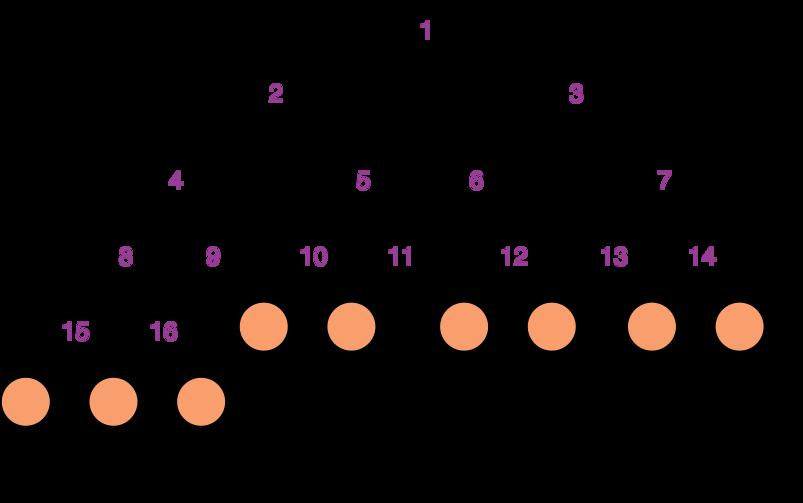
17 ILLUSTRATION OF GENERIC SEARCH 17
18 A GENERIC TREE SEARCH ALGORITHM Tree search: Don t check if nodes are visited multiple times function Search(graph, initialstate, goalstate): initialise frontier using the initialstate while frontier is not empty: select and remove node from frontier if node.state is a goalstate then return node for each child in ExpandChildNodes(node, graph): add child to frontier return failure 18
19 USING TREE SEARCH ON A GRAPH explored nodes might be revisited frontier nodes might be duplicated 19
20 TURNING TREE SEARCH INTO GRAPH SEARCH Graph search: Keep track of visited nodes function Search(graph, initialstate, goalstate): initialise frontier using the initialstate initialise exploredset to the empty set while frontier is not empty: select and remove node from frontier if node.state is a goalstate then return node add node to exploredset for each child in ExpandChildNodes(node, graph): add child to frontier if child is not in frontier or exploredset return failure 20
21 TREE SEARCH VS. GRAPH SEARCH Tree search Pro: uses less memory Con: might visit the same node several times Graph search Pro: only visits nodes at most once Con: uses more memory Note: The pseudocode in these slides (and the course book) is not the only possible! E.g., Wikipedia uses a different variant. 21
22 GRAPH NODES VS. SEARCH NODES Search nodes are not the same as graph nodes! Search nodes should contain more information: the corresponding graph node (called state in R&N) the total path cost from the start node the estimated (heuristic) cost to the goal enough information to be able to calculate the final path procedure ExpandChildNodes(parent, graph): for each (action, child, edgecost) in graph.successors(parent.state): yield new SearchNode(child, total cost so far, estimated cost to goal, information for calculating final path ) 22
23 UNINFORMED SEARCH (R&N 3.4) DEPTH-FIRST SEARCH BREADTH-FIRST SEARCH UNIFORM-COST SEARCH 23
24 QUESTION TIME: DEPTH-FIRST SEARCH Which shaded goal will a depth-first search find first? 24
25 QUESTION TIME: BREADTH-FIRST SEARCH Which shaded goal will a breadth-first search find first? 25
26 DEPTH-FIRST SEARCH Depth-first search treats the frontier as a stack. It always selects one of the last elements added to the frontier. If the list of nodes on the frontier is p 1 p 2 p 3 [,,, ], then: p 1 is selected (and removed). Nodes that extend p 1 are added to the front of the stack (in front of p 2 ). p 2 is only selected when all nodes from p 1 have been explored. 26

27 ILLUSTRATIVE GRAPH: DEPTH-FIRST SEARCH 27
28 COMPLEXITY OF DEPTH-FIRST SEARCH Does DFS guarantee to find the path with fewest arcs? What happens on infinite graphs or on graphs with cycles if there is a solution? What is the time complexity as a function of the path length? What is the space complexity as a function of the path length? How does the goal affect the search? 28
29 BREADTH-FIRST SEARCH Breadth-first search treats the frontier as a queue. It always selects one of the earliest elements added to the frontier. If the list of paths on the frontier is p 1 p 2 p r [,,, ], then: p 1 is selected (and removed). Its neighbors are added to the end of the queue, a er p r. is selected next. p 2 29

30 ILLUSTRATIVE GRAPH: BREADTH-FIRST SEARCH 30
31 COMPLEXITY OF BREADTH-FIRST SEARCH Does BFS guarantee to find the path with fewest arcs? What happens on infinite graphs or on graphs with cycles if there is a solution? What is the time complexity as a function of the path length? What is the space complexity as a function of the path length? How does the goal affect the search? 31
32 UNIFORM-COST SEARCH Weighted graphs: Sometimes there are costs associated with arcs. The cost of a path is the sum of the costs of its arcs. cost( n 0,, n k ) = (, ) n i 1 n i i=1 An optimal solution is one with minimum cost. Uniform-cost search (aka Lowest-cost-first search): Uniform-cost search selects a path on the frontier with the lowest cost. The frontier is a priority queue ordered by path cost. It finds a least-cost path to a goal node i.e., uniform-cost search is optimal When arc costs are equal breadth-first search. k 32
33 HEURISTIC SEARCH (R&N ) GREEDY BEST-FIRST SEARCH A* SEARCH ADMISSIBLE AND CONSISTENT HEURISTICS 33
34 HEURISTIC SEARCH Previous methods don t use the goal to select a path to explore. Main idea: don t ignore the goal when selecting paths. O en there is extra knowledge that can guide the search: heuristics. h(n) is an estimate of the cost of the shortest path from node to a goal node. n h(n) needs to be efficient to compute. h(n) is an underestimate if there is no path from n with cost less than h(n). to a goal An admissible heuristic is a nonnegative underestimating heuristic function: 0 h(n) cost(best path from n to goal) 34
35 EXAMPLE HEURISTIC FUNCTIONS Here are some example heuristic functions: If the nodes are points on a Euclidean plane and the cost is the distance, h(n) can be the straight-line distance (SLD) from n to the closest goal. If the nodes are locations and cost is time, we can use the distance to a goal divided by the maximum speed, h(n) = d(n)/v max (or the average speed,, which makes it non-admissible). h(n) = d(n)/v avg If the graph is a 2D grid maze, then we can use the Manhattan distance. If the goal is to collect all of the coins and not run out of fuel, we can use an estimate of how many steps it will take to collect the coins and return to goal position, without caring about the fuel consumption. A heuristic function can be found by solving a simpler (less constrained) version of the problem. 35

36 EXAMPLE HEURISTIC: ROMANIA DISTANCES 36
37 GREEDY BEST-FIRST SEARCH Main idea: select the path whose end is closest to a goal according to the heuristic function. Best-first search selects a path on the frontier with minimal h-value. It treats the frontier as a priority queue ordered by h. 37
38 GREEDY SEARCH EXAMPLE: ROMANIA This is not the shortest path! 38
39 GREEDY SEARCH IS NOT OPTIMAL Greedy search returns the path: Arad Sibiu Fagaras Bucharest (450km) The optimal path is: Arad Sibiu Rimnicu Pitesti Bucharest (418km) 39

40 BEST-FIRST SEARCH AND INFINITE LOOPS Best-first search might fall into an infinite loop! 40
41 COMPLEXITY OF BEST-FIRST SEARCH Does best-first search guarantee to find the path with fewest arcs? What happens on infinite graphs or on graphs with cycles if there is a solution? What is the time complexity as a function of the path length? What is the space complexity as a function of the path length? How does the goal affect the search? 41
42 A* SEARCH A* search uses both path cost and heuristic values. cost(p) is the cost of path p. h(p) estimates the cost from the end node of p to a goal. f (p) = cost(p) + h(p), estimates the total path cost of going from the start node, via path p to a goal: start path p n cost(p) estimate f (p) h(p) goal 42
43 A* SEARCH A* is a mix of uniform-cost search and best-first search. It treats the frontier as a priority queue ordered by f (p). It always selects the node on the frontier with the lowest estimated distance from the start to a goal node constrained to go via that node. 43
44 COMPLEXITY OF A* SEARCH Does A* search guarantee to find the path with fewest arcs? What happens on infinite graphs or on graphs with cycles if there is a solution? What is the time complexity as a function of the path length? What is the space complexity as a function of the path length? How does the goal affect the search? 44


45 A* SEARCH EXAMPLE: ROMANIA A* guarantees that this is the shortest path! Note that we didn t stop when we added Bucharest to the frontier. Instead, we stopped when we removed Bucharest from the frontier! 45
46 A* SEARCH IS OPTIMAL The optimal path is: Arad Sibiu Rimnicu Pitesti Bucharest (418km) 46
47 A* ALWAYS FINDS A SOLUTION A* will always find a solution if there is one, because: The frontier always contains the initial part of a path to a goal, before that goal is selected. A* halts, because the costs of the paths on the frontier keeps increasing, and will eventually exceed any finite number. 47
48 ADMISSIBILITY (OPTIMALITY) OF A* If there is a solution, A* always finds an optimal one first, provided that: the branching factor is finite, arc costs are bounded above zero (i.e., there is some ϵ > 0 such that all of the arc costs are greater than ϵ), and h(n) is nonnegative and an underestimate of the cost of the shortest path from n to a goal node. These requirements ensure that f keeps increasing. 48
49 WHY IS A* OPTIMAL? The f values in A* are increasing, therefore: first then finally A* expands all nodes with A* expands all nodes with A* expands all nodes with f (n) < C f (n) = C f (n) > C A* will not expand any nodes with f (n) > C, where C is the cost of an optimal solution. (Note: all this assumes that the heuristics is admissible) 49
 Contour i has all nodes with f = f i, where f i < f i+1 50")
50 ILLUSTRATION: WHY IS A* OPTIMAL? A* gradually adds f -contours of nodes (cf. BFS adds layers) Contour i has all nodes with f = f i, where f i < f i+1 50
51 QUESTION TIME: HEURISTICS FOR THE 8 PUZZLE h 1 (n) = number of misplaced tiles h 2 (n) = total Manhattan distance (i.e., no. of squares from desired location of each tile) h 1 (StartState) h 2 (StartState) = 8 = = 18 51
52 DOMINATING HEURISTICS If (admissible) h 2 h 1 (n) for all n, then h 2 dominates h 1 and is better for search. (n) Typical search costs (for 8-puzzle): depth = 14 depth = 24 DFS 3,000,000 nodes A*( h 1 ) = 539 nodes A*( ) = 113 nodes h 2 DFS 54,000,000,000 nodes A*( h 1 ) = 39,135 nodes A*( ) = 1,641 nodes h 2 Given any admissible heuristics h a, h b, the maximum heuristics h(n) is also admissible and dominates both: h a h b h(n) = max( (n), (n)) 52
53 HEURISTICS FROM A RELAXED PROBLEM Admissible heuristics can be derived from the exact solution cost of a relaxed problem: If the rules of the 8-puzzle are relaxed so that a tile can move anywhere, then h 1 (n) gives the shortest solution If the rules are relaxed so that a tile can move to any adjacent square, then h 2 (n) gives the shortest solution Key point: the optimal solution cost of a relaxed problem is never greater than the optimal solution cost of the real problem 53
54 Search strategy SUMMARY OF TREE SEARCH STRATEGIES Frontier selection Halts if solution? Halts if no solution? Space usage Depth first Last node added No No Linear Breadth first First node added Yes No Exp Best first Global min h(p) No No Exp Uniform cost Minimal cost(p) Yes No Exp A* Minimal f (p) Yes No Exp Halts if: If there is a path to a goal, it can find one, even on infinite graphs. Halts if no: Even if there is no solution, it will halt on a finite graph (with cycles). Space: Space complexity as a function of the length of the current path. 54
55 EXAMPLE DEMO Here is an example demo of several different search algorithms, including A*. And you can play with different heuristics: Note that this demo is tailor-made for planar grids, which is a special case of all possible search graphs. (e.g., the Shrdlite graph will not be a planar grid) 55
Learning Objectives. c D. Poole and A. Mackworth 2010 Artificial Intelligence, Lecture 3.3, Page 1
 Learning Objectives At the end of the class you should be able to: devise an useful heuristic function for a problem demonstrate how best-first and A search will work on a graph predict the space and time
Learning Objectives At the end of the class you should be able to: devise an useful heuristic function for a problem demonstrate how best-first and A search will work on a graph predict the space and time
DIT411/TIN175, Artificial Intelligence. Peter Ljunglöf. 23 January, 2018
 DIT411/TIN175, Artificial Intelligence Chapters 3 4: More search algorithms CHAPTERS 3 4: MORE SEARCH ALGORITHMS DIT411/TIN175, Artificial Intelligence Peter Ljunglöf 23 January, 2018 1 TABLE OF CONTENTS
DIT411/TIN175, Artificial Intelligence Chapters 3 4: More search algorithms CHAPTERS 3 4: MORE SEARCH ALGORITHMS DIT411/TIN175, Artificial Intelligence Peter Ljunglöf 23 January, 2018 1 TABLE OF CONTENTS
Lecture 3 - States and Searching
 Lecture 3 - States and Searching Jesse Hoey School of Computer Science University of Waterloo January 15, 2018 Readings: Poole & Mackworth Chapt. 3 (all) Searching Often we are not given an algorithm to
Lecture 3 - States and Searching Jesse Hoey School of Computer Science University of Waterloo January 15, 2018 Readings: Poole & Mackworth Chapt. 3 (all) Searching Often we are not given an algorithm to
Chapter 3: Search. c D. Poole, A. Mackworth 2010, W. Menzel 2015 Artificial Intelligence, Chapter 3, Page 1
 Chapter 3: Search c D. Poole, A. Mackworth 2010, W. Menzel 2015 Artificial Intelligence, Chapter 3, Page 1 Searching Often we are not given an algorithm to solve a problem, but only a specification of
Chapter 3: Search c D. Poole, A. Mackworth 2010, W. Menzel 2015 Artificial Intelligence, Chapter 3, Page 1 Searching Often we are not given an algorithm to solve a problem, but only a specification of
Artificial Intelligence
 Artificial Intelligence Search Marc Toussaint University of Stuttgart Winter 2015/16 (slides based on Stuart Russell s AI course) Outline Problem formulation & examples Basic search algorithms 2/100 Example:
Artificial Intelligence Search Marc Toussaint University of Stuttgart Winter 2015/16 (slides based on Stuart Russell s AI course) Outline Problem formulation & examples Basic search algorithms 2/100 Example:
Problem Solving and Search
 Artificial Intelligence Problem Solving and Search Dae-Won Kim School of Computer Science & Engineering Chung-Ang University Outline Problem-solving agents Problem types Problem formulation Example problems
Artificial Intelligence Problem Solving and Search Dae-Won Kim School of Computer Science & Engineering Chung-Ang University Outline Problem-solving agents Problem types Problem formulation Example problems
Learning Objectives. c D. Poole and A. Mackworth 2010 Artificial Intelligence, Lecture 3.2, Page 1
 Learning Objectives At the end of the class you should be able to: demonstrate how depth-first search will work on a graph demonstrate how breadth-first search will work on a graph predict the space and
Learning Objectives At the end of the class you should be able to: demonstrate how depth-first search will work on a graph demonstrate how breadth-first search will work on a graph predict the space and
DIT411/TIN175, Artificial Intelligence. Peter Ljunglöf. 9 February, 2018
 DIT411/TIN175, Artificial Intelligence Chapters 3, 4, 5, 7: Repetition CHAPTERS 3, 4, 5, 7: REPETITION DIT411/TIN175, Artificial Intelligence Peter Ljunglöf 9 February, 2018 1 TABLE OF CONTENTS Search
DIT411/TIN175, Artificial Intelligence Chapters 3, 4, 5, 7: Repetition CHAPTERS 3, 4, 5, 7: REPETITION DIT411/TIN175, Artificial Intelligence Peter Ljunglöf 9 February, 2018 1 TABLE OF CONTENTS Search
Outline. Best-first search
 Outline Best-first search Greedy best-first search A* search Heuristics Admissible Heuristics Graph Search Consistent Heuristics Local search algorithms Hill-climbing search Beam search Simulated annealing
Outline Best-first search Greedy best-first search A* search Heuristics Admissible Heuristics Graph Search Consistent Heuristics Local search algorithms Hill-climbing search Beam search Simulated annealing
CS 520: Introduction to Artificial Intelligence. Lectures on Search
 CS 520: Introduction to Artificial Intelligence Prof. Louis Steinberg Lecture : uninformed search uninformed search Review Lectures on Search Formulation of search problems. State Spaces Uninformed (blind)
CS 520: Introduction to Artificial Intelligence Prof. Louis Steinberg Lecture : uninformed search uninformed search Review Lectures on Search Formulation of search problems. State Spaces Uninformed (blind)
Robot Programming with Lisp
 6. Search Algorithms Gayane Kazhoyan (Stuart Russell, Peter Norvig) Institute for University of Bremen Contents Problem Definition Uninformed search strategies BFS Uniform-Cost DFS Depth-Limited Iterative
6. Search Algorithms Gayane Kazhoyan (Stuart Russell, Peter Norvig) Institute for University of Bremen Contents Problem Definition Uninformed search strategies BFS Uniform-Cost DFS Depth-Limited Iterative
Informed search strategies (Section ) Source: Fotolia
 Source: Fotolia") Informed search strategies (Section 3.5-3.6) Source: Fotolia Review: Tree search Initialize the frontier using the starting state While the frontier is not empty Choose a frontier node to expand according
Informed search strategies (Section 3.5-3.6) Source: Fotolia Review: Tree search Initialize the frontier using the starting state While the frontier is not empty Choose a frontier node to expand according
CAP 4630 Artificial Intelligence
 CAP 4630 Artificial Intelligence Instructor: Sam Ganzfried sganzfri@cis.fiu.edu 1 http://www.ultimateaiclass.com/ https://moodle.cis.fiu.edu/ 2 Solving problems by search 3 8-puzzle 4 8-queens 5 Search
CAP 4630 Artificial Intelligence Instructor: Sam Ganzfried sganzfri@cis.fiu.edu 1 http://www.ultimateaiclass.com/ https://moodle.cis.fiu.edu/ 2 Solving problems by search 3 8-puzzle 4 8-queens 5 Search
Problem solving and search
 Problem solving and search Chapter 3 Chapter 3 1 Outline Problem-solving agents Problem types Problem formulation Example problems Uninformed search algorithms Informed search algorithms Chapter 3 2 Restricted
Problem solving and search Chapter 3 Chapter 3 1 Outline Problem-solving agents Problem types Problem formulation Example problems Uninformed search algorithms Informed search algorithms Chapter 3 2 Restricted
Search. (Textbook Chpt ) Computer Science cpsc322, Lecture 2. May, 10, CPSC 322, Lecture 2 Slide 1
 Computer Science cpsc322, Lecture 2. May, 10, CPSC 322, Lecture 2 Slide 1") Search Computer Science cpsc322, Lecture 2 (Textbook Chpt 3.0-3.4) May, 10, 2012 CPSC 322, Lecture 2 Slide 1 Colored Cards You need to have 4 colored index cards Come and get them from me if you still
Search Computer Science cpsc322, Lecture 2 (Textbook Chpt 3.0-3.4) May, 10, 2012 CPSC 322, Lecture 2 Slide 1 Colored Cards You need to have 4 colored index cards Come and get them from me if you still
Graphs vs trees up front; use grid too; discuss for BFS, DFS, IDS, UCS Cut back on A* optimality detail; a bit more on importance of heuristics,
 Graphs vs trees up front; use grid too; discuss for BFS, DFS, IDS, UCS Cut back on A* optimality detail; a bit more on importance of heuristics, performance data Pattern DBs? General Tree Search function
Graphs vs trees up front; use grid too; discuss for BFS, DFS, IDS, UCS Cut back on A* optimality detail; a bit more on importance of heuristics, performance data Pattern DBs? General Tree Search function
Solving problems by searching
 Solving problems by searching Chapter 3 Some slide credits to Hwee Tou Ng (Singapore) Outline Problem-solving agents Problem types Problem formulation Example problems Basic search algorithms Heuristics
Solving problems by searching Chapter 3 Some slide credits to Hwee Tou Ng (Singapore) Outline Problem-solving agents Problem types Problem formulation Example problems Basic search algorithms Heuristics
Outline. Best-first search
 Outline Best-first search Greedy best-first search A* search Heuristics Local search algorithms Hill-climbing search Beam search Simulated annealing search Genetic algorithms Constraint Satisfaction Problems
Outline Best-first search Greedy best-first search A* search Heuristics Local search algorithms Hill-climbing search Beam search Simulated annealing search Genetic algorithms Constraint Satisfaction Problems
Informed search. Soleymani. CE417: Introduction to Artificial Intelligence Sharif University of Technology Spring 2016
 Informed search CE417: Introduction to Artificial Intelligence Sharif University of Technology Spring 2016 Soleymani Artificial Intelligence: A Modern Approach, Chapter 3 Outline Best-first search Greedy
Informed search CE417: Introduction to Artificial Intelligence Sharif University of Technology Spring 2016 Soleymani Artificial Intelligence: A Modern Approach, Chapter 3 Outline Best-first search Greedy
Set 2: State-spaces and Uninformed Search. ICS 271 Fall 2015 Kalev Kask
 Set 2: State-spaces and Uninformed Search ICS 271 Fall 2015 Kalev Kask You need to know State-space based problem formulation State space (graph) Search space Nodes vs. states Tree search vs graph search
Set 2: State-spaces and Uninformed Search ICS 271 Fall 2015 Kalev Kask You need to know State-space based problem formulation State space (graph) Search space Nodes vs. states Tree search vs graph search
Route planning / Search Movement Group behavior Decision making
 Game AI Where is the AI Route planning / Search Movement Group behavior Decision making General Search Algorithm Design Keep a pair of set of states: One, the set of states to explore, called the open
Game AI Where is the AI Route planning / Search Movement Group behavior Decision making General Search Algorithm Design Keep a pair of set of states: One, the set of states to explore, called the open
Informed Search and Exploration
 Ch. 03 p.1/47 Informed Search and Exploration Sections 3.5 and 3.6 Ch. 03 p.2/47 Outline Best-first search A search Heuristics, pattern databases IDA search (Recursive Best-First Search (RBFS), MA and
Ch. 03 p.1/47 Informed Search and Exploration Sections 3.5 and 3.6 Ch. 03 p.2/47 Outline Best-first search A search Heuristics, pattern databases IDA search (Recursive Best-First Search (RBFS), MA and
A* optimality proof, cycle checking
 A* optimality proof, cycle checking CPSC 322 Search 5 Textbook 3.6 and 3.7.1 January 21, 2011 Taught by Mike Chiang Lecture Overview Recap Admissibility of A* Cycle checking and multiple path pruning Slide
A* optimality proof, cycle checking CPSC 322 Search 5 Textbook 3.6 and 3.7.1 January 21, 2011 Taught by Mike Chiang Lecture Overview Recap Admissibility of A* Cycle checking and multiple path pruning Slide
Informed Search A* Algorithm
 Informed Search A* Algorithm CE417: Introduction to Artificial Intelligence Sharif University of Technology Spring 2018 Soleymani Artificial Intelligence: A Modern Approach, Chapter 3 Most slides have
Informed Search A* Algorithm CE417: Introduction to Artificial Intelligence Sharif University of Technology Spring 2018 Soleymani Artificial Intelligence: A Modern Approach, Chapter 3 Most slides have
Solving problems by searching
 Solving problems by searching CE417: Introduction to Artificial Intelligence Sharif University of Technology Spring 2017 Soleymani Artificial Intelligence: A Modern Approach, Chapter 3 Outline Problem-solving
Solving problems by searching CE417: Introduction to Artificial Intelligence Sharif University of Technology Spring 2017 Soleymani Artificial Intelligence: A Modern Approach, Chapter 3 Outline Problem-solving
Heuristic Search and Advanced Methods
 Heuristic Search and Advanced Methods Computer Science cpsc322, Lecture 3 (Textbook Chpt 3.6 3.7) May, 15, 2012 CPSC 322, Lecture 3 Slide 1 Course Announcements Posted on WebCT Assignment1 (due on Thurs!)
Heuristic Search and Advanced Methods Computer Science cpsc322, Lecture 3 (Textbook Chpt 3.6 3.7) May, 15, 2012 CPSC 322, Lecture 3 Slide 1 Course Announcements Posted on WebCT Assignment1 (due on Thurs!)
Solving problems by searching
 Solving problems by searching CE417: Introduction to Artificial Intelligence Sharif University of Technology Spring 2014 Soleymani Artificial Intelligence: A Modern Approach, Chapter 3 Outline Problem-solving
Solving problems by searching CE417: Introduction to Artificial Intelligence Sharif University of Technology Spring 2014 Soleymani Artificial Intelligence: A Modern Approach, Chapter 3 Outline Problem-solving
PROBLEM SOLVING AND SEARCH IN ARTIFICIAL INTELLIGENCE
 Artificial Intelligence, Computational Logic PROBLEM SOLVING AND SEARCH IN ARTIFICIAL INTELLIGENCE Lecture 3 Informed Search Sarah Gaggl Dresden, 22th April 2014 Agenda 1 Introduction 2 Uninformed Search
Artificial Intelligence, Computational Logic PROBLEM SOLVING AND SEARCH IN ARTIFICIAL INTELLIGENCE Lecture 3 Informed Search Sarah Gaggl Dresden, 22th April 2014 Agenda 1 Introduction 2 Uninformed Search
Introduction to Artificial Intelligence. Informed Search
 Introduction to Artificial Intelligence Informed Search Bernhard Beckert UNIVERSITÄT KOBLENZ-LANDAU Winter Term 2004/2005 B. Beckert: KI für IM p.1 Outline Best-first search A search Heuristics B. Beckert:
Introduction to Artificial Intelligence Informed Search Bernhard Beckert UNIVERSITÄT KOBLENZ-LANDAU Winter Term 2004/2005 B. Beckert: KI für IM p.1 Outline Best-first search A search Heuristics B. Beckert:
Outline for today s lecture. Informed Search. Informed Search II. Review: Properties of greedy best-first search. Review: Greedy best-first search:
 Outline for today s lecture Informed Search II Informed Search Optimal informed search: A* (AIMA 3.5.2) Creating good heuristic functions Hill Climbing 2 Review: Greedy best-first search: f(n): estimated
Outline for today s lecture Informed Search II Informed Search Optimal informed search: A* (AIMA 3.5.2) Creating good heuristic functions Hill Climbing 2 Review: Greedy best-first search: f(n): estimated
Informed search algorithms
 Informed search algorithms Chapter 4, Sections 1 2 Chapter 4, Sections 1 2 1 Outline Best-first search A search Heuristics Chapter 4, Sections 1 2 2 Review: Tree search function Tree-Search( problem, fringe)
Informed search algorithms Chapter 4, Sections 1 2 Chapter 4, Sections 1 2 1 Outline Best-first search A search Heuristics Chapter 4, Sections 1 2 2 Review: Tree search function Tree-Search( problem, fringe)
Problem solving and search
 Problem solving and search Chapter 3 TB Artificial Intelligence Slides from AIMA http://aima.cs.berkeley.edu 1 /1 Outline Problem-solving agents Problem types Problem formulation Example problems Basic
Problem solving and search Chapter 3 TB Artificial Intelligence Slides from AIMA http://aima.cs.berkeley.edu 1 /1 Outline Problem-solving agents Problem types Problem formulation Example problems Basic
Artificial Intelligence: Search Part 2: Heuristic search
 Artificial Intelligence: Search Part 2: Heuristic search Thomas Trappenberg January 16, 2009 Based on the slides provided by Russell and Norvig, Chapter 4, Section 1 2,(4) Outline Best-first search A search
Artificial Intelligence: Search Part 2: Heuristic search Thomas Trappenberg January 16, 2009 Based on the slides provided by Russell and Norvig, Chapter 4, Section 1 2,(4) Outline Best-first search A search
Recap A Search Optimality of A. Search: A. CPSC 322 Search 5. Textbook 3.6. Search: A CPSC 322 Search 5, Slide 1
 Search: A CPSC 322 Search 5 Textbook 3.6 Search: A CPSC 322 Search 5, Slide 1 Lecture Overview 1 Recap 2 A Search 3 Optimality of A Search: A CPSC 322 Search 5, Slide 2 Search with Costs Sometimes there
Search: A CPSC 322 Search 5 Textbook 3.6 Search: A CPSC 322 Search 5, Slide 1 Lecture Overview 1 Recap 2 A Search 3 Optimality of A Search: A CPSC 322 Search 5, Slide 2 Search with Costs Sometimes there
Search. CS 3793/5233 Artificial Intelligence Search 1
 CS 3793/5233 Artificial Intelligence 1 Basics Basics State-Space Problem Directed Graphs Generic Algorithm Examples Uninformed is finding a sequence of actions that achieve a goal from an initial state.
CS 3793/5233 Artificial Intelligence 1 Basics Basics State-Space Problem Directed Graphs Generic Algorithm Examples Uninformed is finding a sequence of actions that achieve a goal from an initial state.
COMP9414/ 9814/ 3411: Artificial Intelligence. 5. Informed Search. Russell & Norvig, Chapter 3. UNSW c Alan Blair,
 COMP9414/ 9814/ 3411: Artificial Intelligence 5. Informed Search Russell & Norvig, Chapter 3. COMP9414/9814/3411 15s1 Informed Search 1 Search Strategies General Search algorithm: add initial state to
COMP9414/ 9814/ 3411: Artificial Intelligence 5. Informed Search Russell & Norvig, Chapter 3. COMP9414/9814/3411 15s1 Informed Search 1 Search Strategies General Search algorithm: add initial state to
Informed Search and Exploration
 Ch. 03b p.1/51 Informed Search and Exploration Sections 3.5 and 3.6 Nilufer Onder Department of Computer Science Michigan Technological University Ch. 03b p.2/51 Outline Best-first search A search Heuristics,
Ch. 03b p.1/51 Informed Search and Exploration Sections 3.5 and 3.6 Nilufer Onder Department of Computer Science Michigan Technological University Ch. 03b p.2/51 Outline Best-first search A search Heuristics,
Solving Problems by Searching. Artificial Intelligence Santa Clara University 2016
 Solving Problems by Searching Artificial Intelligence Santa Clara University 2016 Problem Solving Agents Problem Solving Agents Use atomic representation of states Planning agents Use factored or structured
Solving Problems by Searching Artificial Intelligence Santa Clara University 2016 Problem Solving Agents Problem Solving Agents Use atomic representation of states Planning agents Use factored or structured
Informed Search and Exploration for Agents
 Informed Search and Exploration for Agents R&N: 3.5, 3.6 Michael Rovatsos University of Edinburgh 29 th January 2015 Outline Best-first search Greedy best-first search A * search Heuristics Admissibility
Informed Search and Exploration for Agents R&N: 3.5, 3.6 Michael Rovatsos University of Edinburgh 29 th January 2015 Outline Best-first search Greedy best-first search A * search Heuristics Admissibility
ARTIFICIAL INTELLIGENCE (CSC9YE ) LECTURES 2 AND 3: PROBLEM SOLVING
 LECTURES 2 AND 3: PROBLEM SOLVING") ARTIFICIAL INTELLIGENCE (CSC9YE ) LECTURES 2 AND 3: PROBLEM SOLVING BY SEARCH Gabriela Ochoa http://www.cs.stir.ac.uk/~goc/ OUTLINE Problem solving by searching Problem formulation Example problems Search
ARTIFICIAL INTELLIGENCE (CSC9YE ) LECTURES 2 AND 3: PROBLEM SOLVING BY SEARCH Gabriela Ochoa http://www.cs.stir.ac.uk/~goc/ OUTLINE Problem solving by searching Problem formulation Example problems Search
Solving Problems by Searching
 Solving Problems by Searching Berlin Chen 2004 Reference: 1. S. Russell and P. Norvig. Artificial Intelligence: A Modern Approach. Chapter 3 1 Introduction Problem-Solving Agents vs. Reflex Agents Problem-solving
Solving Problems by Searching Berlin Chen 2004 Reference: 1. S. Russell and P. Norvig. Artificial Intelligence: A Modern Approach. Chapter 3 1 Introduction Problem-Solving Agents vs. Reflex Agents Problem-solving
Artificial Intelligence
 Artificial Intelligence CSC348 Unit 3: Problem Solving and Search Syedur Rahman Lecturer, CSE Department North South University syedur.rahman@wolfson.oxon.org Artificial Intelligence: Lecture Notes The
Artificial Intelligence CSC348 Unit 3: Problem Solving and Search Syedur Rahman Lecturer, CSE Department North South University syedur.rahman@wolfson.oxon.org Artificial Intelligence: Lecture Notes The
Informed search algorithms
 Artificial Intelligence Topic 4 Informed search algorithms Best-first search Greedy search A search Admissible heuristics Memory-bounded search IDA SMA Reading: Russell and Norvig, Chapter 4, Sections
Artificial Intelligence Topic 4 Informed search algorithms Best-first search Greedy search A search Admissible heuristics Memory-bounded search IDA SMA Reading: Russell and Norvig, Chapter 4, Sections
Class Overview. Introduction to Artificial Intelligence COMP 3501 / COMP Lecture 2. Problem Solving Agents. Problem Solving Agents: Assumptions
 Class Overview COMP 3501 / COMP 4704-4 Lecture 2 Prof. JGH 318 Problem Solving Agents Problem Solving Agents: Assumptions Requires a goal Assume world is: Requires actions Observable What actions? Discrete
Class Overview COMP 3501 / COMP 4704-4 Lecture 2 Prof. JGH 318 Problem Solving Agents Problem Solving Agents: Assumptions Requires a goal Assume world is: Requires actions Observable What actions? Discrete
Informed Search Algorithms. Chapter 4
 Informed Search Algorithms Chapter 4 Outline Informed Search and Heuristic Functions For informed search, we use problem-specific knowledge to guide the search. Topics: Best-first search A search Heuristics
Informed Search Algorithms Chapter 4 Outline Informed Search and Heuristic Functions For informed search, we use problem-specific knowledge to guide the search. Topics: Best-first search A search Heuristics
CSE 473. Chapter 4 Informed Search. CSE AI Faculty. Last Time. Blind Search BFS UC-BFS DFS DLS Iterative Deepening Bidirectional Search
 CSE 473 Chapter 4 Informed Search CSE AI Faculty Blind Search BFS UC-BFS DFS DLS Iterative Deepening Bidirectional Search Last Time 2 1 Repeated States Failure to detect repeated states can turn a linear
CSE 473 Chapter 4 Informed Search CSE AI Faculty Blind Search BFS UC-BFS DFS DLS Iterative Deepening Bidirectional Search Last Time 2 1 Repeated States Failure to detect repeated states can turn a linear
CS 771 Artificial Intelligence. Informed Search
 CS 771 Artificial Intelligence Informed Search Outline Review limitations of uninformed search methods Informed (or heuristic) search Uses problem-specific heuristics to improve efficiency Best-first,
CS 771 Artificial Intelligence Informed Search Outline Review limitations of uninformed search methods Informed (or heuristic) search Uses problem-specific heuristics to improve efficiency Best-first,
Search EECS 348 Intro to Artificial Intelligence
 Search EECS 348 Intro to Artificial Intelligence (slides from Oren Etzioni, based on Stuart Russell, Dan Weld, Henry Kautz, and others) What is Search? Search is a class of techniques for systematically
Search EECS 348 Intro to Artificial Intelligence (slides from Oren Etzioni, based on Stuart Russell, Dan Weld, Henry Kautz, and others) What is Search? Search is a class of techniques for systematically
Search EECS 395/495 Intro to Artificial Intelligence
 Search EECS 395/495 Intro to Artificial Intelligence Doug Downey (slides from Oren Etzioni, based on Stuart Russell, Dan Weld, Henry Kautz, and others) What is Search? Search is a class of techniques for
Search EECS 395/495 Intro to Artificial Intelligence Doug Downey (slides from Oren Etzioni, based on Stuart Russell, Dan Weld, Henry Kautz, and others) What is Search? Search is a class of techniques for
521495A: Artificial Intelligence
 521495A: Artificial Intelligence Informed Search Lectured by Abdenour Hadid Adjunct Professor, CMVS, University of Oulu Slides adopted from http://ai.berkeley.edu Today Informed Search Heuristics Greedy
521495A: Artificial Intelligence Informed Search Lectured by Abdenour Hadid Adjunct Professor, CMVS, University of Oulu Slides adopted from http://ai.berkeley.edu Today Informed Search Heuristics Greedy
CS:4420 Artificial Intelligence
 CS:4420 Artificial Intelligence Spring 2018 Informed Search Cesare Tinelli The University of Iowa Copyright 2004 18, Cesare Tinelli and Stuart Russell a a These notes were originally developed by Stuart
CS:4420 Artificial Intelligence Spring 2018 Informed Search Cesare Tinelli The University of Iowa Copyright 2004 18, Cesare Tinelli and Stuart Russell a a These notes were originally developed by Stuart
S A E RC R H C I H NG N G IN N S T S A T T A E E G R G A R PH P S
 LECTURE 2 SEARCHING IN STATE GRAPHS Introduction Idea: Problem Solving as Search Basic formalism as State-Space Graph Graph explored by Tree Search Different algorithms to explore the graph Slides mainly
LECTURE 2 SEARCHING IN STATE GRAPHS Introduction Idea: Problem Solving as Search Basic formalism as State-Space Graph Graph explored by Tree Search Different algorithms to explore the graph Slides mainly
Heuristic Search: A* CPSC 322 Search 4 January 19, Textbook 3.6 Taught by: Vasanth
 Heuristic Search: A* CPSC 322 Search 4 January 19, 2011 Textbook 3.6 Taught by: Vasanth 1 Lecture Overview Recap Search heuristics: admissibility and examples Recap of BestFS Heuristic search: A* 2 Example
Heuristic Search: A* CPSC 322 Search 4 January 19, 2011 Textbook 3.6 Taught by: Vasanth 1 Lecture Overview Recap Search heuristics: admissibility and examples Recap of BestFS Heuristic search: A* 2 Example
Informed Search Lecture 5
 Lecture 5 How can we exploit problem-specific knowledge to find solutions more efficiently? Where does this knowledge come from and under what conditions is it useful? 1 Agenda Review: Uninformed Search
Lecture 5 How can we exploit problem-specific knowledge to find solutions more efficiently? Where does this knowledge come from and under what conditions is it useful? 1 Agenda Review: Uninformed Search
Informed Search. Dr. Richard J. Povinelli. Copyright Richard J. Povinelli Page 1
 Informed Search Dr. Richard J. Povinelli Copyright Richard J. Povinelli Page 1 rev 1.1, 9/25/2001 Objectives You should be able to explain and contrast uniformed and informed searches. be able to compare,
Informed Search Dr. Richard J. Povinelli Copyright Richard J. Povinelli Page 1 rev 1.1, 9/25/2001 Objectives You should be able to explain and contrast uniformed and informed searches. be able to compare,
AGENTS AND ENVIRONMENTS. What is AI in reality?
 AGENTS AND ENVIRONMENTS What is AI in reality? AI is our attempt to create a machine that thinks (or acts) humanly (or rationally) Think like a human Cognitive Modeling Think rationally Logic-based Systems
AGENTS AND ENVIRONMENTS What is AI in reality? AI is our attempt to create a machine that thinks (or acts) humanly (or rationally) Think like a human Cognitive Modeling Think rationally Logic-based Systems
Basic Search. Fall Xin Yao. Artificial Intelligence: Basic Search
 Basic Search Xin Yao Fall 2017 Fall 2017 Artificial Intelligence: Basic Search Xin Yao Outline Motivating Examples Problem Formulation From Searching to Search Tree Uninformed Search Methods Breadth-first
Basic Search Xin Yao Fall 2017 Fall 2017 Artificial Intelligence: Basic Search Xin Yao Outline Motivating Examples Problem Formulation From Searching to Search Tree Uninformed Search Methods Breadth-first
Class Overview. Introduction to Artificial Intelligence COMP 3501 / COMP Lecture 2: Search. Problem Solving Agents
 Class Overview COMP 3501 / COMP 4704-4 Lecture 2: Search Prof. 1 2 Problem Solving Agents Problem Solving Agents: Assumptions Requires a goal Assume world is: Requires actions Observable What actions?
Class Overview COMP 3501 / COMP 4704-4 Lecture 2: Search Prof. 1 2 Problem Solving Agents Problem Solving Agents: Assumptions Requires a goal Assume world is: Requires actions Observable What actions?
Overview. Path Cost Function. Real Life Problems. COMP219: Artificial Intelligence. Lecture 10: Heuristic Search
 COMP219: Artificial Intelligence Lecture 10: Heuristic Search Overview Last time Depth-limited, iterative deepening and bi-directional search Avoiding repeated states Today Show how applying knowledge
COMP219: Artificial Intelligence Lecture 10: Heuristic Search Overview Last time Depth-limited, iterative deepening and bi-directional search Avoiding repeated states Today Show how applying knowledge
COMP219: Artificial Intelligence. Lecture 10: Heuristic Search
 COMP219: Artificial Intelligence Lecture 10: Heuristic Search 1 Class Tests Class Test 1 (Prolog): Tuesday 8 th November (Week 7) 13:00-14:00 LIFS-LT2 and LIFS-LT3 Class Test 2 (Everything but Prolog)
COMP219: Artificial Intelligence Lecture 10: Heuristic Search 1 Class Tests Class Test 1 (Prolog): Tuesday 8 th November (Week 7) 13:00-14:00 LIFS-LT2 and LIFS-LT3 Class Test 2 (Everything but Prolog)
A and Branch-and-Bound Search
 A and Branch-and-Bound Search CPSC 322 Lecture 7 January 17, 2006 Textbook 2.5 A and Branch-and-Bound Search CPSC 322 Lecture 7, Slide 1 Lecture Overview Recap A Search Optimality of A Optimal Efficiency
A and Branch-and-Bound Search CPSC 322 Lecture 7 January 17, 2006 Textbook 2.5 A and Branch-and-Bound Search CPSC 322 Lecture 7, Slide 1 Lecture Overview Recap A Search Optimality of A Optimal Efficiency
Solving Problems by Searching
 Solving Problems by Searching CS486/686 University of Waterloo Sept 11, 2008 1 Outline Problem solving agents and search Examples Properties of search algorithms Uninformed search Breadth first Depth first
Solving Problems by Searching CS486/686 University of Waterloo Sept 11, 2008 1 Outline Problem solving agents and search Examples Properties of search algorithms Uninformed search Breadth first Depth first
Vorlesung Grundlagen der Künstlichen Intelligenz
 Vorlesung Grundlagen der Künstlichen Intelligenz Reinhard Lafrenz / Prof. A. Knoll Robotics and Embedded Systems Department of Informatics I6 Technische Universität München www6.in.tum.de lafrenz@in.tum.de
Vorlesung Grundlagen der Künstlichen Intelligenz Reinhard Lafrenz / Prof. A. Knoll Robotics and Embedded Systems Department of Informatics I6 Technische Universität München www6.in.tum.de lafrenz@in.tum.de
Informed search methods
 CS 2710 Foundations of AI Lecture 5 Informed search methods Milos Hauskrecht milos@pitt.edu 5329 Sennott Square Announcements Homework assignment 2 is out Due on Tuesday, September 19, 2017 before the
CS 2710 Foundations of AI Lecture 5 Informed search methods Milos Hauskrecht milos@pitt.edu 5329 Sennott Square Announcements Homework assignment 2 is out Due on Tuesday, September 19, 2017 before the
Announcements. Solution to Assignment 1 is posted Assignment 2 is available Video automatically uploaded (see web page)
") Announcements Solution to Assignment 1 is posted Assignment 2 is available Video automatically uploaded (see web page) c D. Poole and A. Mackworth 2017 CPSC 322 Lecture 4 1 / 27 Review: Searching A frontier
Announcements Solution to Assignment 1 is posted Assignment 2 is available Video automatically uploaded (see web page) c D. Poole and A. Mackworth 2017 CPSC 322 Lecture 4 1 / 27 Review: Searching A frontier
Outline. Informed search algorithms. Best-first search. Review: Tree search. A search Heuristics. Chapter 4, Sections 1 2 4
 Outline Best-first search Informed search algorithms A search Heuristics Chapter 4, Sections 1 2 Chapter 4, Sections 1 2 1 Chapter 4, Sections 1 2 2 Review: Tree search function Tree-Search( problem, fringe)
Outline Best-first search Informed search algorithms A search Heuristics Chapter 4, Sections 1 2 Chapter 4, Sections 1 2 1 Chapter 4, Sections 1 2 2 Review: Tree search function Tree-Search( problem, fringe)
Chapter 3: Informed Search and Exploration. Dr. Daisy Tang
 Chapter 3: Informed Search and Exploration Dr. Daisy Tang Informed Search Definition: Use problem-specific knowledge beyond the definition of the problem itself Can find solutions more efficiently Best-first
Chapter 3: Informed Search and Exploration Dr. Daisy Tang Informed Search Definition: Use problem-specific knowledge beyond the definition of the problem itself Can find solutions more efficiently Best-first
COMP219: Artificial Intelligence. Lecture 10: Heuristic Search
 COMP219: Artificial Intelligence Lecture 10: Heuristic Search 1 Class Tests Class Test 1 (Prolog): Friday 17th November (Week 8), 15:00-17:00. Class Test 2 (Everything but Prolog) Friday 15th December
COMP219: Artificial Intelligence Lecture 10: Heuristic Search 1 Class Tests Class Test 1 (Prolog): Friday 17th November (Week 8), 15:00-17:00. Class Test 2 (Everything but Prolog) Friday 15th December
CS486/686 Lecture Slides (c) 2014 P.Poupart
 2014 P.Poupart") 1 2 1 Solving Problems by Searching [RN2] Sec 3.1-3.5 [RN3] Sec 3.1-3.4 CS486/686 University of Waterloo Lecture 2: January 9, 2014 3 Outline Problem solving agents and search Examples Properties of search
1 2 1 Solving Problems by Searching [RN2] Sec 3.1-3.5 [RN3] Sec 3.1-3.4 CS486/686 University of Waterloo Lecture 2: January 9, 2014 3 Outline Problem solving agents and search Examples Properties of search
A.I.: Informed Search Algorithms. Chapter III: Part Deux
 A.I.: Informed Search Algorithms Chapter III: Part Deux Best-first search Greedy best-first search A * search Heuristics Outline Overview Informed Search: uses problem-specific knowledge. General approach:
A.I.: Informed Search Algorithms Chapter III: Part Deux Best-first search Greedy best-first search A * search Heuristics Outline Overview Informed Search: uses problem-specific knowledge. General approach:
Artificial Intelligence
 Artificial Intelligence Informed Search and Exploration Chapter 4 (4.1 4.2) A General Search algorithm: Chapter 3: Search Strategies Task : Find a sequence of actions leading from the initial state to
Artificial Intelligence Informed Search and Exploration Chapter 4 (4.1 4.2) A General Search algorithm: Chapter 3: Search Strategies Task : Find a sequence of actions leading from the initial state to
Artificial Intelligence
 Artificial Intelligence Jeff Clune Assistant Professor Evolving Artificial Intelligence Laboratory AI Challenge One Transform to graph Explore the graph, looking for? dust unexplored squares Some good
Artificial Intelligence Jeff Clune Assistant Professor Evolving Artificial Intelligence Laboratory AI Challenge One Transform to graph Explore the graph, looking for? dust unexplored squares Some good
Uninformed Search. Problem-solving agents. Tree search algorithms. Single-State Problems
 Uninformed Search Problem-solving agents Tree search algorithms Single-State Problems Breadth-First Search Depth-First Search Limited-Depth Search Iterative Deepening Extensions Graph search algorithms
Uninformed Search Problem-solving agents Tree search algorithms Single-State Problems Breadth-First Search Depth-First Search Limited-Depth Search Iterative Deepening Extensions Graph search algorithms
CS 5522: Artificial Intelligence II
 CS 5522: Artificial Intelligence II Search Algorithms Instructor: Wei Xu Ohio State University [These slides were adapted from CS188 Intro to AI at UC Berkeley.] Today Agents that Plan Ahead Search Problems
CS 5522: Artificial Intelligence II Search Algorithms Instructor: Wei Xu Ohio State University [These slides were adapted from CS188 Intro to AI at UC Berkeley.] Today Agents that Plan Ahead Search Problems
Informed (heuristic) search (cont). Constraint-satisfaction search.
 search (cont). Constraint-satisfaction search.") CS 1571 Introduction to AI Lecture 5 Informed (heuristic) search (cont). Constraint-satisfaction search. Milos Hauskrecht milos@cs.pitt.edu 539 Sennott Square Administration PS 1 due today Report before
CS 1571 Introduction to AI Lecture 5 Informed (heuristic) search (cont). Constraint-satisfaction search. Milos Hauskrecht milos@cs.pitt.edu 539 Sennott Square Administration PS 1 due today Report before
AGENTS AND ENVIRONMENTS. What is AI in reality?
 AGENTS AND ENVIRONMENTS What is AI in reality? AI is our attempt to create a machine that thinks (or acts) humanly (or rationally) Think like a human Cognitive Modeling Think rationally Logic-based Systems
AGENTS AND ENVIRONMENTS What is AI in reality? AI is our attempt to create a machine that thinks (or acts) humanly (or rationally) Think like a human Cognitive Modeling Think rationally Logic-based Systems
Artificial Intelligence. Informed search methods
 Artificial Intelligence Informed search methods In which we see how information about the state space can prevent algorithms from blundering about in the dark. 2 Uninformed vs. Informed Search Uninformed
Artificial Intelligence Informed search methods In which we see how information about the state space can prevent algorithms from blundering about in the dark. 2 Uninformed vs. Informed Search Uninformed
DFS. Depth-limited Search
 DFS Completeness? No, fails in infinite depth spaces or spaces with loops Yes, assuming state space finite. Time complexity? O(b m ), terrible if m is much bigger than d. can do well if lots of goals Space
DFS Completeness? No, fails in infinite depth spaces or spaces with loops Yes, assuming state space finite. Time complexity? O(b m ), terrible if m is much bigger than d. can do well if lots of goals Space
Lecture 4: Informed/Heuristic Search
 Lecture 4: Informed/Heuristic Search Outline Limitations of uninformed search methods Informed (or heuristic) search uses problem-specific heuristics to improve efficiency Best-first A* RBFS SMA* Techniques
Lecture 4: Informed/Heuristic Search Outline Limitations of uninformed search methods Informed (or heuristic) search uses problem-specific heuristics to improve efficiency Best-first A* RBFS SMA* Techniques
Informed search algorithms. Chapter 4, Sections 1 2 1
 Informed search algorithms Chapter 4, Sections 1 2 Chapter 4, Sections 1 2 1 Outline Best-first search A search Heuristics Chapter 4, Sections 1 2 2 Review: Tree search function Tree-Search( problem, fringe)
Informed search algorithms Chapter 4, Sections 1 2 Chapter 4, Sections 1 2 1 Outline Best-first search A search Heuristics Chapter 4, Sections 1 2 2 Review: Tree search function Tree-Search( problem, fringe)
CS510 \ Lecture Ariel Stolerman
 CS510 \ Lecture02 2012-10-03 1 Ariel Stolerman Midterm Evan will email about that after the lecture, at least 2 lectures from now. The exam will be given in a regular PDF (not an online form). We will
CS510 \ Lecture02 2012-10-03 1 Ariel Stolerman Midterm Evan will email about that after the lecture, at least 2 lectures from now. The exam will be given in a regular PDF (not an online form). We will
CS 343: Artificial Intelligence
 CS 343: Artificial Intelligence Informed Search Prof. Scott Niekum University of Texas at Austin [These slides based on ones created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley.
CS 343: Artificial Intelligence Informed Search Prof. Scott Niekum University of Texas at Austin [These slides based on ones created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley.
CSE 40171: Artificial Intelligence. Informed Search: A* Search
 CSE 40171: Artificial Intelligence Informed Search: A* Search 1 Homework #1 has been released. It is due at 11:59PM on 9/10. 2 Quick Recap: Search Quick Recap: Search Search problem: States (configurations
CSE 40171: Artificial Intelligence Informed Search: A* Search 1 Homework #1 has been released. It is due at 11:59PM on 9/10. 2 Quick Recap: Search Quick Recap: Search Search problem: States (configurations
CS486/686 Lecture Slides (c) 2015 P.Poupart
 2015 P.Poupart") 1 2 Solving Problems by Searching [RN2] Sec 3.1-3.5 [RN3] Sec 3.1-3.4 CS486/686 University of Waterloo Lecture 2: May 7, 2015 3 Outline Problem solving agents and search Examples Properties of search algorithms
1 2 Solving Problems by Searching [RN2] Sec 3.1-3.5 [RN3] Sec 3.1-3.4 CS486/686 University of Waterloo Lecture 2: May 7, 2015 3 Outline Problem solving agents and search Examples Properties of search algorithms
Informed Search (Ch )
") Informed Search (Ch. 3.5-3.6) Informed search In uninformed search, we only had the node information (parent, children, cost of actions) Now we will assume there is some additional information, we will
Informed Search (Ch. 3.5-3.6) Informed search In uninformed search, we only had the node information (parent, children, cost of actions) Now we will assume there is some additional information, we will
Search with Costs and Heuristic Search
 Search with Costs and Heuristic Search Alan Mackworth UBC CS 322 Search 3 January 14, 2013 Textbook 3.5.3, 3.6, 3.6.1 1 Today s Lecture Recap from last lecture, combined with AIspace demo Search with costs:
Search with Costs and Heuristic Search Alan Mackworth UBC CS 322 Search 3 January 14, 2013 Textbook 3.5.3, 3.6, 3.6.1 1 Today s Lecture Recap from last lecture, combined with AIspace demo Search with costs:
COSC343: Artificial Intelligence
 COSC343: Artificial Intelligence Lecture 18: Informed search algorithms Alistair Knott Dept. of Computer Science, University of Otago Alistair Knott (Otago) COSC343 Lecture 18 1 / 1 In today s lecture
COSC343: Artificial Intelligence Lecture 18: Informed search algorithms Alistair Knott Dept. of Computer Science, University of Otago Alistair Knott (Otago) COSC343 Lecture 18 1 / 1 In today s lecture
Informed Search and Exploration
 Informed Search and Exploration Chapter 4 (4.1-4.3) CS 2710 1 Introduction Ch.3 searches good building blocks for learning about search But vastly inefficient eg: Can we do better? Breadth Depth Uniform
Informed Search and Exploration Chapter 4 (4.1-4.3) CS 2710 1 Introduction Ch.3 searches good building blocks for learning about search But vastly inefficient eg: Can we do better? Breadth Depth Uniform
Today. Informed Search. Graph Search. Heuristics Greedy Search A* Search
 Informed Search [These slides were created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. All CS188 materials are available at http://ai.berkeley.edu.] Today Informed Search Heuristics
Informed Search [These slides were created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. All CS188 materials are available at http://ai.berkeley.edu.] Today Informed Search Heuristics
Artificial Intelligence
 Artificial Intelligence hapter 1 hapter 1 1 Iterative deepening search function Iterative-Deepening-Search( problem) returns a solution inputs: problem, a problem for depth 0 to do result Depth-Limited-Search(
Artificial Intelligence hapter 1 hapter 1 1 Iterative deepening search function Iterative-Deepening-Search( problem) returns a solution inputs: problem, a problem for depth 0 to do result Depth-Limited-Search(
Why Search. Things to consider. Example, a holiday in Jamaica. CSE 3401: Intro to Artificial Intelligence Uninformed Search
 CSE 3401: Intro to Artificial Intelligence Uninformed Search Why Search Required Readings: R & N Chapter 3, Sec. 1-4. Lecture slides adapted from those of Fahiem Bacchus. Successful Success in game playing
CSE 3401: Intro to Artificial Intelligence Uninformed Search Why Search Required Readings: R & N Chapter 3, Sec. 1-4. Lecture slides adapted from those of Fahiem Bacchus. Successful Success in game playing
CSE 40171: Artificial Intelligence. Uninformed Search: Search Spaces
 CSE 40171: Artificial Intelligence Uninformed Search: Search Spaces 1 Homework #1 has been released. It is due at 11:59PM on 9/10. 2 Course Roadmap Introduction Problem Solving Machine Learning (week 1)
CSE 40171: Artificial Intelligence Uninformed Search: Search Spaces 1 Homework #1 has been released. It is due at 11:59PM on 9/10. 2 Course Roadmap Introduction Problem Solving Machine Learning (week 1)
Uninformed Search. Chapter 3. (Based on slides by Stuart Russell, Subbarao Kambhampati, Dan Weld, Oren Etzioni, Henry Kautz, and other UW-AI faculty)
") Uninformed Search Chapter 3 (Based on slides by Stuart Russell, Subbarao Kambhampati, Dan Weld, Oren Etzioni, Henry Kautz, and other UW-AI faculty) Agent s Knowledge Representation Type State representation
Uninformed Search Chapter 3 (Based on slides by Stuart Russell, Subbarao Kambhampati, Dan Weld, Oren Etzioni, Henry Kautz, and other UW-AI faculty) Agent s Knowledge Representation Type State representation
CSCI 446: Artificial Intelligence
 CSCI 446: Artificial Intelligence Informed Search Instructor: Michele Van Dyne [These slides were created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. All CS188 materials are available
CSCI 446: Artificial Intelligence Informed Search Instructor: Michele Van Dyne [These slides were created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. All CS188 materials are available
TDDC17. Intuitions behind heuristic search. Recall Uniform-Cost Search. Best-First Search. f(n) =... + h(n) g(n) = cost of path from root node to n
 =... + h(n) g(n) = cost of path from root node to n") Intuitions behind heuristic search The separation property of GRAPH-SEARCH TDDC17 Seminar III Search II Informed or Heuristic Search Beyond Classical Search Find a heuristic measure h(n) which estimates
Intuitions behind heuristic search The separation property of GRAPH-SEARCH TDDC17 Seminar III Search II Informed or Heuristic Search Beyond Classical Search Find a heuristic measure h(n) which estimates
Informed/Heuristic Search
 Informed/Heuristic Search Outline Limitations of uninformed search methods Informed (or heuristic) search uses problem-specific heuristics to improve efficiency Best-first A* Techniques for generating
Informed/Heuristic Search Outline Limitations of uninformed search methods Informed (or heuristic) search uses problem-specific heuristics to improve efficiency Best-first A* Techniques for generating
CS 4700: Foundations of Artificial Intelligence
 CS 4700: Foundations of Artificial Intelligence Bart Selman selman@cs.cornell.edu Informed Search Readings R&N - Chapter 3: 3.5 and 3.6 Search Search strategies determined by choice of node (in queue)
CS 4700: Foundations of Artificial Intelligence Bart Selman selman@cs.cornell.edu Informed Search Readings R&N - Chapter 3: 3.5 and 3.6 Search Search strategies determined by choice of node (in queue)
Informed search algorithms. (Based on slides by Oren Etzioni, Stuart Russell)
") Informed search algorithms (Based on slides by Oren Etzioni, Stuart Russell) Outline Greedy best-first search A * search Heuristics Local search algorithms Hill-climbing search Simulated annealing search
Informed search algorithms (Based on slides by Oren Etzioni, Stuart Russell) Outline Greedy best-first search A * search Heuristics Local search algorithms Hill-climbing search Simulated annealing search
3 SOLVING PROBLEMS BY SEARCHING
 48 3 SOLVING PROBLEMS BY SEARCHING A goal-based agent aims at solving problems by performing actions that lead to desirable states Let us first consider the uninformed situation in which the agent is not
48 3 SOLVING PROBLEMS BY SEARCHING A goal-based agent aims at solving problems by performing actions that lead to desirable states Let us first consider the uninformed situation in which the agent is not
Solving Problem by Searching. Chapter 3
 Solving Problem by Searching Chapter 3 Outline Problem-solving agents Problem formulation Example problems Basic search algorithms blind search Heuristic search strategies Heuristic functions Problem-solving
Solving Problem by Searching Chapter 3 Outline Problem-solving agents Problem formulation Example problems Basic search algorithms blind search Heuristic search strategies Heuristic functions Problem-solving