CAP 4630 Artificial Intelligence
|
|
|
- Cornelius Lester
- 6 years ago
- Views:
Transcription
1 CAP 4630 Artificial Intelligence Instructor: Sam Ganzfried 1
2 2

3 Solving problems by search 3

4 8-puzzle 4

5 8-queens 5
6 Search problem definition States Initial state Actions Transition model Goal test Path cost 6
7 Definition for 8-queens problem States: Any arrangement of 0 to 8 queens on the board is a state. Initial state: No queens on the board. Actions: Add a queen to any empty square. Transition model: Returns the board with a queen added to the specified square Goal test: 8 queens are on the board, none attacked Path cost: (Not applicable) 7
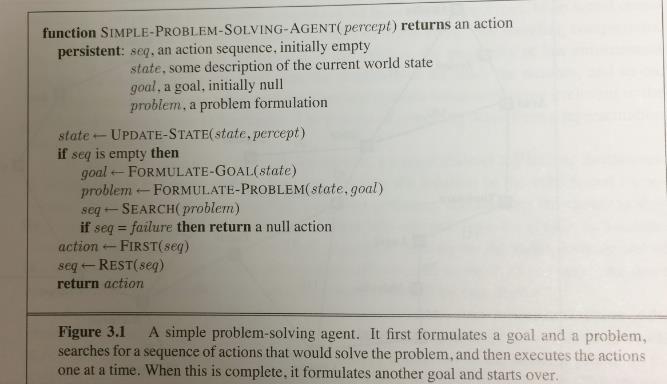
8 Problem-solving approach 8

9 Searching Romania 9

10 General tree and graph search algorithm 10
11 Real-world search Driving directions (e.g., Google maps) Airline travel problems: Find optimal flight subject to conditions entered by user (e.g., for kayak.com) Tourism problems: E.g., Visit every city in Romania map at least once, starting and ending in Bucharest. Traveling salesman problem: Find shortest tour in which each city visited exactly once VLSI layout: Positioning millions of components and connections on a chip to minimize area, circuit delays, stray capacitances, and maximize manufacturing yield Robot navigation: generalization of route-finding problem to continuous space with potentially infinite set of actions and states. Automatic assembly sequencing of complex objects by a robot, e.g., electric motors and protein design 11
12 Evaluating performance Completeness: Is the algorithm guaranteed to find a solution when there is one? Optimality: Does the strategy find the optimal solution, as defined on page 68 (i.e., lowest path cost among all solutions) Time complexity: How long does it take to find a solution? Space complexity: How much memory is needed to perform the search? 12
13 Complexity Time and space complexity are always considered with respect to some measure of the problem difficulty. In theoretical computer science, the typical measure is the size of the state space graph, V + E, where V is the set of vertices (nodes) of the graph and E is the set of edges (links). This is appropriate when the graph is an explicit data structure that is input to the search program (e.g., map of Romania). 13
14 Complexity In AI, the graph is often represented implicitly by the initial state, actions, and transition model, and is frequently infinite. For these reasons, complexity is expressed in terms of three quantities: b, the branching factor or maximum number of successors of any node; d, the depth of the shallowest goal node (i.e., the number of steps along the path from the root); m, the maximum length of any path in the state space Time is often measured in terms of the number of nodes generated during the search, and space in terms of the maximum number of nodes stored in memory. 14
15 Search algorithm effectiveness To assess the effectiveness of a search algorithm we can consider just the search cost which typically depends on the time complexity but can include a term for memory usage or we can use total cost, which combines the search cost and the path cost of the solution found. For problem of finding route from Arad to Bucharest, the search cost is the amount of time taken by the search (milliseconds) and the solution cost is the total length of the path in kilometers. To compute total cost, we can convert km to ms by using a car s average speed. 15
16 Uninformed and informed search For uninformed search (aka blind search), the strategies have no additional information about states beyond that provided in the problem definition. All they can do is generate successors and distinguish a goal state from a non-goal state. All search strategies are distinguished by the order in which nodes are expanded. Strategies that know whether one non-goal state is more promising that another are called informed search or heuristic search strategies. 16
17 Breadth-first search (BFS) 17
")
18 Breadth-first search (BFS) 18
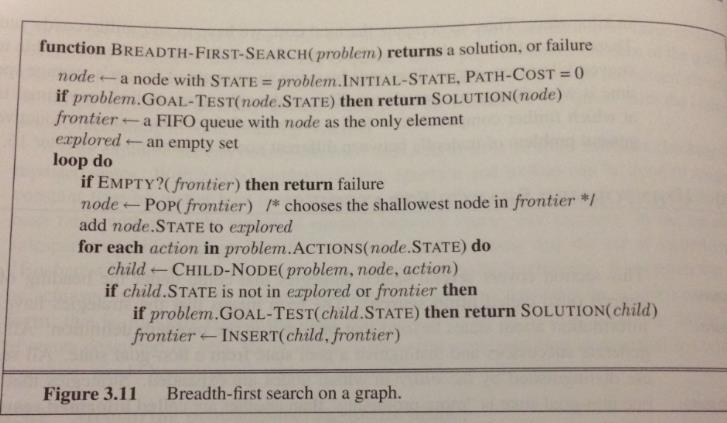
19 BFS Shallowest unexpanded node is chosen next for expansion Uses first-in-first-out (FIFO) queue Queue: pops oldest element (first in) Stack: pops newest element (LIFO queue) Priority queue: pops element with highest priority One slight tweak on the general graph-search algorithm is that the goal test is applied to each node when it is generated rather than when it is selected for expansion 19
20 BFS 20
21 BFS Is BFS complete? Is BFS guaranteed to find a solution when one exists? 21
22 BFS Yes we can easily see that it is complete if the shallowest goal node is at some finite depth d, BFS will eventually find it after generating all shallower nodes (provided the branching factor b is finite). Note that as soon as a goal node is generated, we know it is the shallowest goal node because all shallower nodes must have been generated already and failed the goal test. Now the shallowest goal node is not necessarily the optimal one; technically BFS is optimal if the path cost is a nondecreasing function of the depth of the node. The most common such scenario is that all actions have the same cost. 22
23 BFS running time b nodes at first level each of which generates b more nodes at second level, for a total of b^2 at the second level, b^3 at third level, etc. If we suppose that the solution is at depth d, then in the worst case it is the last node generated at that level. Then the total number of nodes generated is b + b^2 + b^3 + + b^d = O(b^d) If the algorithm were to apply the goal test to nodes when selected for expansion, rather than when generated, the whole layer at depth d would be expanded before the goal was detected and the time complexity would be O(b^(d+1)) 23
24 BFS memory For any kind of graph search, which stores every expanded node in the explored set, the space complexity is always within a factor of b of the time complexity. For breadth-first graph search, every node generated remains in memory. There will be O(b^(d- 1)) nodes in the explored set and O(b^d) nodes in the frontier, so the space complexity is O(b^d), i.e., it is dominated by the size of the frontier. Switching to a tree search would not save much space, and in a state space with many redundant paths switching could cost a great deal of time. 24
25 BFS 25
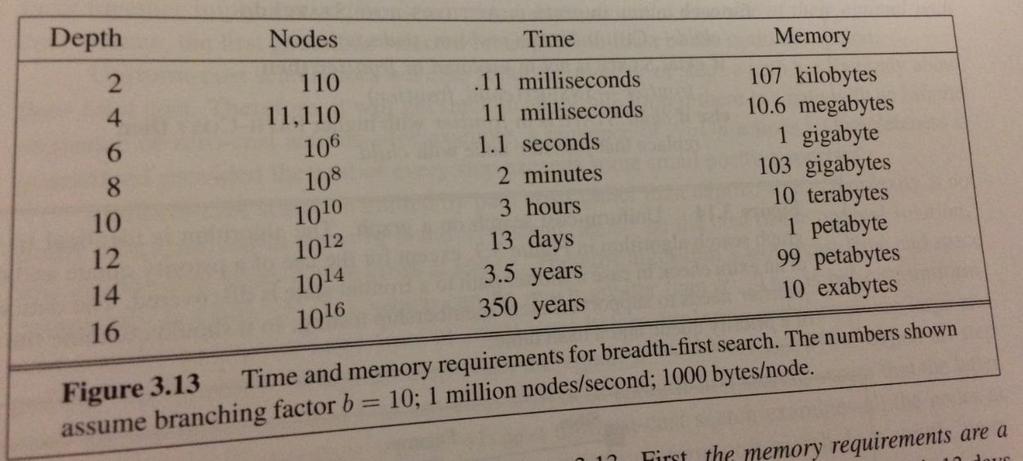
26 BFS lessons The memory requirements are a bigger problem for BFS than is the execution time. One might wait 13 days for the solution to an important problem with search depth 12, but no personal computer has the petabyte of memory it would take. Fortunately, other strategies require less memory. The second lesson is that time is still a major factor. If your problem has a solution at depth 16, then (given our assumptions) it will take about 350 years for BFS (or indeed any uninformed search) to find it. In general, exponential-complexity search problems cannot be solved by uninformed methods for any but the smallest instances. 26
27 Uniform-cost search (UCS) When all step costs are equal, BFS is optimal because it always expands the shallowest unexpanded node. By simple extension, we can find an algorithm that is optimal with any step-cost function. Instead of expanding the shallowest node, uniform-cost search expands the node n with the lowest path cost g(n). This is done by storing the frontier as a priority queue ordered by g. 27
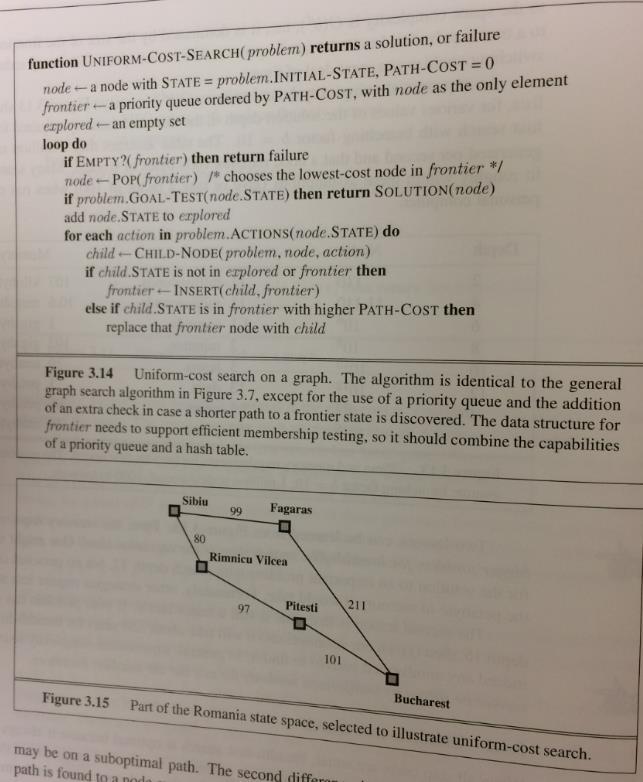
28 Uniform-cost search In addition to the ordering of the queue by path cost, there are two other significant differences from BFS. The first is that the goal test is applied to a node when it is selected for expansion (as in the generic graphsearch algorithm) rather than when it is first generated. The reason is that the first goal node that is generated may be on a suboptimal path. The second difference is that a test is added in case a better path is found to a node currently on the frontier. 28
29 UCS 29
30 UCS Problem: get from Sibiu to Bucharest Successors of Sibiu are Rimnicu Vilcea and Fagaras, with costs 80 and 99 respectively. The least-cost node, Rimnicu Vilcea, is expanded next, adding Pitesti with cost = 177. The least-cost node is now Fagaras, so it is expanded, adding Bucharest with cost = 310. Now a goal node has been generated, but UCS keeps going, choosing Pitesti for expansion and adding a second path to Bucharest with cost = 278. Now the algorithm checks to see if this new path is better than the old one; it is, so the old one is discarded. Bucharest, now with g-cost 278, is selected for expansion and the solution is 30 returned.
31 UCS How does UCS shape up on the Big 4? Optimality, completeness, time, space 31
32 UCS It is easy to see that UCS is optimal in general. First, we observe that whenever UCS selects a node n for expansion, the optimal path to that node has been found. (Were this not the case, there would have to be another frontier node n on the optimal path from the start node to b; by definition, n would have lower g- cost than n and would have been selected first.) Then, because step costs are nonnegative, paths never get shorter as nodes are added. These two facts together imply that UCS expands nodes in order of their optimal path cost. Hence, the first goal node selected for expansion must be the optimal solution. 32
33 UCS UCS does not care about the number of steps a path has, but only about their total cost. Therefore, it will get stuck in an infinite loop if there is a path with an infinite sequence of zero-cost actions for example, a sequence of NoOp actions. Completeness is guaranteed provided the cost of every step exceeds some small positive constant ε. 33
34 UCS UCS is guided by path costs rather than depths, so its complexity is not easily characterized in terms of b and d. Instead, let C* be the cost of the optimal solution, and assume that every action costs at least ε. Then the algorithm s worstcase time and space complexity is O(b^(1+floor(C*/ ε)), which can be much greater than b^d. This is because UCS can explore large trees of small steps before exploring paths involving large and perhaps useful steps. When all step costs are equal, it is O(b^(d+1)). When all step costs are the same, UCS is similar to BFS, except that the latter stops as soon as it generates a goal, whereas UCS examines all the nodes at the goal s depth to see if one has lower cost; thus, UCS does strictly more work by expanding nodes at depth d unnecessarily. 34
")
35 Depth-first search (DFS) 35
36 Depth-limited search (DLS) Imposes a depth limit L on DFS to prevent it from getting stuck along hopeless path. 36
37 Iterated deepening depth-first search Runs DLS with depth limit 0, 1, 2, etc. Ends when depth limit reaches d, depth of the shallowest goal node. 37
38 Bidirectional search Run two simultaneous searches one forward from the initial state and the other backward from the goal hoping that the two searches meet in the middle. 38

39 Comparing uninformed search strategies 39
40 Informed search algorithms Greedy best-first search A* search Memory-bounded heuristic search These algorithms have a heuristic function to help guide the search. 40
41 Homework for next class Chapter 4 from Russell-Norvig textbook. 41
Chapter 3: Solving Problems by Searching
 Chapter 3: Solving Problems by Searching Prepared by: Dr. Ziad Kobti 1 Problem-Solving Agent Reflex agent -> base its actions on a direct mapping from states to actions. Cannot operate well in large environments
Chapter 3: Solving Problems by Searching Prepared by: Dr. Ziad Kobti 1 Problem-Solving Agent Reflex agent -> base its actions on a direct mapping from states to actions. Cannot operate well in large environments
Artificial Intelligence
 Artificial Intelligence CSC348 Unit 3: Problem Solving and Search Syedur Rahman Lecturer, CSE Department North South University syedur.rahman@wolfson.oxon.org Artificial Intelligence: Lecture Notes The
Artificial Intelligence CSC348 Unit 3: Problem Solving and Search Syedur Rahman Lecturer, CSE Department North South University syedur.rahman@wolfson.oxon.org Artificial Intelligence: Lecture Notes The
Solving Problems by Searching
 Solving Problems by Searching Berlin Chen 2004 Reference: 1. S. Russell and P. Norvig. Artificial Intelligence: A Modern Approach. Chapter 3 1 Introduction Problem-Solving Agents vs. Reflex Agents Problem-solving
Solving Problems by Searching Berlin Chen 2004 Reference: 1. S. Russell and P. Norvig. Artificial Intelligence: A Modern Approach. Chapter 3 1 Introduction Problem-Solving Agents vs. Reflex Agents Problem-solving
Basic Search. Fall Xin Yao. Artificial Intelligence: Basic Search
 Basic Search Xin Yao Fall 2017 Fall 2017 Artificial Intelligence: Basic Search Xin Yao Outline Motivating Examples Problem Formulation From Searching to Search Tree Uninformed Search Methods Breadth-first
Basic Search Xin Yao Fall 2017 Fall 2017 Artificial Intelligence: Basic Search Xin Yao Outline Motivating Examples Problem Formulation From Searching to Search Tree Uninformed Search Methods Breadth-first
CS 771 Artificial Intelligence. Problem Solving by Searching Uninformed search
 CS 771 Artificial Intelligence Problem Solving by Searching Uninformed search Complete architectures for intelligence? Search? Solve the problem of what to do. Learning? Learn what to do. Logic and inference?
CS 771 Artificial Intelligence Problem Solving by Searching Uninformed search Complete architectures for intelligence? Search? Solve the problem of what to do. Learning? Learn what to do. Logic and inference?
Ar#ficial)Intelligence!!
Intelligence!!") Introduc*on! Ar#ficial)Intelligence!! Roman Barták Department of Theoretical Computer Science and Mathematical Logic Problem Solving: Uninformed Search Simple reflex agent only transfers the current percept
Introduc*on! Ar#ficial)Intelligence!! Roman Barták Department of Theoretical Computer Science and Mathematical Logic Problem Solving: Uninformed Search Simple reflex agent only transfers the current percept
Chapter 3 Solving problems by searching
 1 Chapter 3 Solving problems by searching CS 461 Artificial Intelligence Pinar Duygulu Bilkent University, Slides are mostly adapted from AIMA and MIT Open Courseware 2 Introduction Simple-reflex agents
1 Chapter 3 Solving problems by searching CS 461 Artificial Intelligence Pinar Duygulu Bilkent University, Slides are mostly adapted from AIMA and MIT Open Courseware 2 Introduction Simple-reflex agents
Solving Problems by Searching
 Solving Problems by Searching CS486/686 University of Waterloo Sept 11, 2008 1 Outline Problem solving agents and search Examples Properties of search algorithms Uninformed search Breadth first Depth first
Solving Problems by Searching CS486/686 University of Waterloo Sept 11, 2008 1 Outline Problem solving agents and search Examples Properties of search algorithms Uninformed search Breadth first Depth first
Uninformed Search. Problem-solving agents. Tree search algorithms. Single-State Problems
 Uninformed Search Problem-solving agents Tree search algorithms Single-State Problems Breadth-First Search Depth-First Search Limited-Depth Search Iterative Deepening Extensions Graph search algorithms
Uninformed Search Problem-solving agents Tree search algorithms Single-State Problems Breadth-First Search Depth-First Search Limited-Depth Search Iterative Deepening Extensions Graph search algorithms
Problem solving and search
 Problem solving and search Chapter 3 Chapter 3 1 Outline Problem-solving agents Problem types Problem formulation Example problems Uninformed search algorithms Informed search algorithms Chapter 3 2 Restricted
Problem solving and search Chapter 3 Chapter 3 1 Outline Problem-solving agents Problem types Problem formulation Example problems Uninformed search algorithms Informed search algorithms Chapter 3 2 Restricted
Route planning / Search Movement Group behavior Decision making
 Game AI Where is the AI Route planning / Search Movement Group behavior Decision making General Search Algorithm Design Keep a pair of set of states: One, the set of states to explore, called the open
Game AI Where is the AI Route planning / Search Movement Group behavior Decision making General Search Algorithm Design Keep a pair of set of states: One, the set of states to explore, called the open
Chapter3. Problem-Solving Agents. Problem Solving Agents (cont.) Well-defined Problems and Solutions. Example Problems.
 Well-defined Problems and Solutions. Example Problems.") Problem-Solving Agents Chapter3 Solving Problems by Searching Reflex agents cannot work well in those environments - state/action mapping too large - take too long to learn Problem-solving agent - is one
Problem-Solving Agents Chapter3 Solving Problems by Searching Reflex agents cannot work well in those environments - state/action mapping too large - take too long to learn Problem-solving agent - is one
Set 2: State-spaces and Uninformed Search. ICS 271 Fall 2015 Kalev Kask
 Set 2: State-spaces and Uninformed Search ICS 271 Fall 2015 Kalev Kask You need to know State-space based problem formulation State space (graph) Search space Nodes vs. states Tree search vs graph search
Set 2: State-spaces and Uninformed Search ICS 271 Fall 2015 Kalev Kask You need to know State-space based problem formulation State space (graph) Search space Nodes vs. states Tree search vs graph search
Solving Problems by Searching
 Solving Problems by Searching Agents, Goal-Based Agents, Problem-Solving Agents Search Problems Blind Search Strategies Agents sensors environment percepts actions? agent effectors Definition. An agent
Solving Problems by Searching Agents, Goal-Based Agents, Problem-Solving Agents Search Problems Blind Search Strategies Agents sensors environment percepts actions? agent effectors Definition. An agent
Solving Problems by Searching
 Solving Problems by Searching Agents, Goal-Based Agents, Problem-Solving Agents Search Problems Blind Search Strategies Agents sensors environment percepts actions? agent effectors Definition. An agent
Solving Problems by Searching Agents, Goal-Based Agents, Problem-Solving Agents Search Problems Blind Search Strategies Agents sensors environment percepts actions? agent effectors Definition. An agent
Chapter 3. A problem-solving agent is a kind of goal-based agent. It decide what to do by finding sequences of actions that lead to desirable states.
 Chapter 3 A problem-solving agent is a kind of goal-based agent. It decide what to do by finding sequences of actions that lead to desirable states. A problem can be defined by four components : 1. The
Chapter 3 A problem-solving agent is a kind of goal-based agent. It decide what to do by finding sequences of actions that lead to desirable states. A problem can be defined by four components : 1. The
Week 3: Path Search. COMP9414/ 9814/ 3411: Artificial Intelligence. Motivation. Example: Romania. Romania Street Map. Russell & Norvig, Chapter 3.
 COMP9414/9814/3411 17s1 Search 1 COMP9414/ 9814/ 3411: Artificial Intelligence Week 3: Path Search Russell & Norvig, Chapter 3. Motivation Reactive and Model-Based Agents choose their actions based only
COMP9414/9814/3411 17s1 Search 1 COMP9414/ 9814/ 3411: Artificial Intelligence Week 3: Path Search Russell & Norvig, Chapter 3. Motivation Reactive and Model-Based Agents choose their actions based only
S A E RC R H C I H NG N G IN N S T S A T T A E E G R G A R PH P S
 LECTURE 2 SEARCHING IN STATE GRAPHS Introduction Idea: Problem Solving as Search Basic formalism as State-Space Graph Graph explored by Tree Search Different algorithms to explore the graph Slides mainly
LECTURE 2 SEARCHING IN STATE GRAPHS Introduction Idea: Problem Solving as Search Basic formalism as State-Space Graph Graph explored by Tree Search Different algorithms to explore the graph Slides mainly
CS486/686 Lecture Slides (c) 2015 P.Poupart
 2015 P.Poupart") 1 2 Solving Problems by Searching [RN2] Sec 3.1-3.5 [RN3] Sec 3.1-3.4 CS486/686 University of Waterloo Lecture 2: May 7, 2015 3 Outline Problem solving agents and search Examples Properties of search algorithms
1 2 Solving Problems by Searching [RN2] Sec 3.1-3.5 [RN3] Sec 3.1-3.4 CS486/686 University of Waterloo Lecture 2: May 7, 2015 3 Outline Problem solving agents and search Examples Properties of search algorithms
CS486/686 Lecture Slides (c) 2014 P.Poupart
 2014 P.Poupart") 1 2 1 Solving Problems by Searching [RN2] Sec 3.1-3.5 [RN3] Sec 3.1-3.4 CS486/686 University of Waterloo Lecture 2: January 9, 2014 3 Outline Problem solving agents and search Examples Properties of search
1 2 1 Solving Problems by Searching [RN2] Sec 3.1-3.5 [RN3] Sec 3.1-3.4 CS486/686 University of Waterloo Lecture 2: January 9, 2014 3 Outline Problem solving agents and search Examples Properties of search
Solving problems by searching
 Solving problems by searching Chapter 3 CS 2710 1 Outline Problem-solving agents Problem formulation Example problems Basic search algorithms CS 2710 - Blind Search 2 1 Goal-based Agents Agents that take
Solving problems by searching Chapter 3 CS 2710 1 Outline Problem-solving agents Problem formulation Example problems Basic search algorithms CS 2710 - Blind Search 2 1 Goal-based Agents Agents that take
ARTIFICIAL INTELLIGENCE. Pathfinding and search
 INFOB2KI 2017-2018 Utrecht University The Netherlands ARTIFICIAL INTELLIGENCE Pathfinding and search Lecturer: Silja Renooij These slides are part of the INFOB2KI Course Notes available from www.cs.uu.nl/docs/vakken/b2ki/schema.html
INFOB2KI 2017-2018 Utrecht University The Netherlands ARTIFICIAL INTELLIGENCE Pathfinding and search Lecturer: Silja Renooij These slides are part of the INFOB2KI Course Notes available from www.cs.uu.nl/docs/vakken/b2ki/schema.html
CS 4700: Foundations of Artificial Intelligence. Bart Selman. Search Techniques R&N: Chapter 3
 CS 4700: Foundations of Artificial Intelligence Bart Selman Search Techniques R&N: Chapter 3 Outline Search: tree search and graph search Uninformed search: very briefly (covered before in other prerequisite
CS 4700: Foundations of Artificial Intelligence Bart Selman Search Techniques R&N: Chapter 3 Outline Search: tree search and graph search Uninformed search: very briefly (covered before in other prerequisite
Search I. slides from: Padhraic Smyth, Bryan Low, S. Russell and P. Norvig
 Search I slides from: Padhraic Smyth, Bryan Low, S. Russell and P. Norvig Problem-Solving Agents Intelligent agents can solve problems by searching a state-space State-space Model the agent s model of
Search I slides from: Padhraic Smyth, Bryan Low, S. Russell and P. Norvig Problem-Solving Agents Intelligent agents can solve problems by searching a state-space State-space Model the agent s model of
Artificial Intelligence
 Artificial Intelligence Search Marc Toussaint University of Stuttgart Winter 2015/16 (slides based on Stuart Russell s AI course) Outline Problem formulation & examples Basic search algorithms 2/100 Example:
Artificial Intelligence Search Marc Toussaint University of Stuttgart Winter 2015/16 (slides based on Stuart Russell s AI course) Outline Problem formulation & examples Basic search algorithms 2/100 Example:
Solving Problem by Searching. Chapter 3
 Solving Problem by Searching Chapter 3 Outline Problem-solving agents Problem formulation Example problems Basic search algorithms blind search Heuristic search strategies Heuristic functions Problem-solving
Solving Problem by Searching Chapter 3 Outline Problem-solving agents Problem formulation Example problems Basic search algorithms blind search Heuristic search strategies Heuristic functions Problem-solving
Problem solving and search
 Problem solving and search Chapter 3 Chapter 3 1 How to Solve a (Simple) Problem 7 2 4 1 2 5 6 3 4 5 8 3 1 6 7 8 Start State Goal State Chapter 3 2 Introduction Simple goal-based agents can solve problems
Problem solving and search Chapter 3 Chapter 3 1 How to Solve a (Simple) Problem 7 2 4 1 2 5 6 3 4 5 8 3 1 6 7 8 Start State Goal State Chapter 3 2 Introduction Simple goal-based agents can solve problems
CMU-Q Lecture 2: Search problems Uninformed search. Teacher: Gianni A. Di Caro
 CMU-Q 15-381 Lecture 2: Search problems Uninformed search Teacher: Gianni A. Di Caro RECAP: ACT RATIONALLY Think like people Think rationally Agent Sensors? Actuators Percepts Actions Environment Act like
CMU-Q 15-381 Lecture 2: Search problems Uninformed search Teacher: Gianni A. Di Caro RECAP: ACT RATIONALLY Think like people Think rationally Agent Sensors? Actuators Percepts Actions Environment Act like
COMP9414/ 9814/ 3411: Artificial Intelligence. 5. Informed Search. Russell & Norvig, Chapter 3. UNSW c Alan Blair,
 COMP9414/ 9814/ 3411: Artificial Intelligence 5. Informed Search Russell & Norvig, Chapter 3. COMP9414/9814/3411 15s1 Informed Search 1 Search Strategies General Search algorithm: add initial state to
COMP9414/ 9814/ 3411: Artificial Intelligence 5. Informed Search Russell & Norvig, Chapter 3. COMP9414/9814/3411 15s1 Informed Search 1 Search Strategies General Search algorithm: add initial state to
Informed Search and Exploration
 Ch. 03 p.1/47 Informed Search and Exploration Sections 3.5 and 3.6 Ch. 03 p.2/47 Outline Best-first search A search Heuristics, pattern databases IDA search (Recursive Best-First Search (RBFS), MA and
Ch. 03 p.1/47 Informed Search and Exploration Sections 3.5 and 3.6 Ch. 03 p.2/47 Outline Best-first search A search Heuristics, pattern databases IDA search (Recursive Best-First Search (RBFS), MA and
Problem Solving and Search
 Artificial Intelligence Problem Solving and Search Dae-Won Kim School of Computer Science & Engineering Chung-Ang University Outline Problem-solving agents Problem types Problem formulation Example problems
Artificial Intelligence Problem Solving and Search Dae-Won Kim School of Computer Science & Engineering Chung-Ang University Outline Problem-solving agents Problem types Problem formulation Example problems
DFS. Depth-limited Search
 DFS Completeness? No, fails in infinite depth spaces or spaces with loops Yes, assuming state space finite. Time complexity? O(b m ), terrible if m is much bigger than d. can do well if lots of goals Space
DFS Completeness? No, fails in infinite depth spaces or spaces with loops Yes, assuming state space finite. Time complexity? O(b m ), terrible if m is much bigger than d. can do well if lots of goals Space
AGENTS AND ENVIRONMENTS. What is AI in reality?
 AGENTS AND ENVIRONMENTS What is AI in reality? AI is our attempt to create a machine that thinks (or acts) humanly (or rationally) Think like a human Cognitive Modeling Think rationally Logic-based Systems
AGENTS AND ENVIRONMENTS What is AI in reality? AI is our attempt to create a machine that thinks (or acts) humanly (or rationally) Think like a human Cognitive Modeling Think rationally Logic-based Systems
Search EECS 395/495 Intro to Artificial Intelligence
 Search EECS 395/495 Intro to Artificial Intelligence Doug Downey (slides from Oren Etzioni, based on Stuart Russell, Dan Weld, Henry Kautz, and others) What is Search? Search is a class of techniques for
Search EECS 395/495 Intro to Artificial Intelligence Doug Downey (slides from Oren Etzioni, based on Stuart Russell, Dan Weld, Henry Kautz, and others) What is Search? Search is a class of techniques for
Problem Solving as Search. CMPSCI 383 September 15, 2011
 Problem Solving as Search CMPSCI 383 September 15, 2011 1 Today s lecture Problem-solving as search Uninformed search methods Problem abstraction Bold Claim: Many problems faced by intelligent agents,
Problem Solving as Search CMPSCI 383 September 15, 2011 1 Today s lecture Problem-solving as search Uninformed search methods Problem abstraction Bold Claim: Many problems faced by intelligent agents,
Search EECS 348 Intro to Artificial Intelligence
 Search EECS 348 Intro to Artificial Intelligence (slides from Oren Etzioni, based on Stuart Russell, Dan Weld, Henry Kautz, and others) What is Search? Search is a class of techniques for systematically
Search EECS 348 Intro to Artificial Intelligence (slides from Oren Etzioni, based on Stuart Russell, Dan Weld, Henry Kautz, and others) What is Search? Search is a class of techniques for systematically
CSE 473. Chapter 4 Informed Search. CSE AI Faculty. Last Time. Blind Search BFS UC-BFS DFS DLS Iterative Deepening Bidirectional Search
 CSE 473 Chapter 4 Informed Search CSE AI Faculty Blind Search BFS UC-BFS DFS DLS Iterative Deepening Bidirectional Search Last Time 2 1 Repeated States Failure to detect repeated states can turn a linear
CSE 473 Chapter 4 Informed Search CSE AI Faculty Blind Search BFS UC-BFS DFS DLS Iterative Deepening Bidirectional Search Last Time 2 1 Repeated States Failure to detect repeated states can turn a linear
4. Solving Problems by Searching
 COMP9414/9814/3411 15s1 Search 1 COMP9414/ 9814/ 3411: Artificial Intelligence 4. Solving Problems by Searching Russell & Norvig, Chapter 3. Motivation Reactive and Model-Based Agents choose their actions
COMP9414/9814/3411 15s1 Search 1 COMP9414/ 9814/ 3411: Artificial Intelligence 4. Solving Problems by Searching Russell & Norvig, Chapter 3. Motivation Reactive and Model-Based Agents choose their actions
AI: problem solving and search
 : problem solving and search Stefano De Luca Slides mainly by Tom Lenaerts Outline Problem-solving agents A kind of goal-based agent Problem types Single state (fully observable) Search with partial information
: problem solving and search Stefano De Luca Slides mainly by Tom Lenaerts Outline Problem-solving agents A kind of goal-based agent Problem types Single state (fully observable) Search with partial information
Robot Programming with Lisp
 6. Search Algorithms Gayane Kazhoyan (Stuart Russell, Peter Norvig) Institute for University of Bremen Contents Problem Definition Uninformed search strategies BFS Uniform-Cost DFS Depth-Limited Iterative
6. Search Algorithms Gayane Kazhoyan (Stuart Russell, Peter Norvig) Institute for University of Bremen Contents Problem Definition Uninformed search strategies BFS Uniform-Cost DFS Depth-Limited Iterative
CS 8520: Artificial Intelligence
 CS 8520: Artificial Intelligence Solving Problems by Searching Paula Matuszek Spring, 2013 Slides based on Hwee Tou Ng, aima.eecs.berkeley.edu/slides-ppt, which are in turn based on Russell, aima.eecs.berkeley.edu/slides-pdf.
CS 8520: Artificial Intelligence Solving Problems by Searching Paula Matuszek Spring, 2013 Slides based on Hwee Tou Ng, aima.eecs.berkeley.edu/slides-ppt, which are in turn based on Russell, aima.eecs.berkeley.edu/slides-pdf.
Informed Search and Exploration
 Ch. 03b p.1/51 Informed Search and Exploration Sections 3.5 and 3.6 Nilufer Onder Department of Computer Science Michigan Technological University Ch. 03b p.2/51 Outline Best-first search A search Heuristics,
Ch. 03b p.1/51 Informed Search and Exploration Sections 3.5 and 3.6 Nilufer Onder Department of Computer Science Michigan Technological University Ch. 03b p.2/51 Outline Best-first search A search Heuristics,
Outline for today s lecture. Informed Search I. One issue: How to search backwards? Very briefly: Bidirectional search. Outline for today s lecture
 Outline for today s lecture Informed Search I Uninformed Search Briefly: Bidirectional Search (AIMA 3.4.6) Uniform Cost Search (UCS) Informed Search Introduction to Informed search Heuristics 1 st attempt:
Outline for today s lecture Informed Search I Uninformed Search Briefly: Bidirectional Search (AIMA 3.4.6) Uniform Cost Search (UCS) Informed Search Introduction to Informed search Heuristics 1 st attempt:
Solving problems by searching
 Solving problems by searching CE417: Introduction to Artificial Intelligence Sharif University of Technology Spring 2017 Soleymani Artificial Intelligence: A Modern Approach, Chapter 3 Outline Problem-solving
Solving problems by searching CE417: Introduction to Artificial Intelligence Sharif University of Technology Spring 2017 Soleymani Artificial Intelligence: A Modern Approach, Chapter 3 Outline Problem-solving
ARTIFICIAL INTELLIGENCE SOLVING PROBLEMS BY SEARCHING. Chapter 3
 ARTIFICIAL INTELLIGENCE SOLVING PROBLEMS BY SEARCHING Chapter 3 1 PROBLEM SOLVING We want: To automatically solve a problem We need: A representation of the problem Algorithms that use some strategy to
ARTIFICIAL INTELLIGENCE SOLVING PROBLEMS BY SEARCHING Chapter 3 1 PROBLEM SOLVING We want: To automatically solve a problem We need: A representation of the problem Algorithms that use some strategy to
Solving problems by searching
 Solving problems by searching CE417: Introduction to Artificial Intelligence Sharif University of Technology Spring 2014 Soleymani Artificial Intelligence: A Modern Approach, Chapter 3 Outline Problem-solving
Solving problems by searching CE417: Introduction to Artificial Intelligence Sharif University of Technology Spring 2014 Soleymani Artificial Intelligence: A Modern Approach, Chapter 3 Outline Problem-solving
521495A: Artificial Intelligence
 521495A: Artificial Intelligence Search Lectured by Abdenour Hadid Associate Professor, CMVS, University of Oulu Slides adopted from http://ai.berkeley.edu Agent An agent is an entity that perceives the
521495A: Artificial Intelligence Search Lectured by Abdenour Hadid Associate Professor, CMVS, University of Oulu Slides adopted from http://ai.berkeley.edu Agent An agent is an entity that perceives the
AGENTS AND ENVIRONMENTS. What is AI in reality?
 AGENTS AND ENVIRONMENTS What is AI in reality? AI is our attempt to create a machine that thinks (or acts) humanly (or rationally) Think like a human Cognitive Modeling Think rationally Logic-based Systems
AGENTS AND ENVIRONMENTS What is AI in reality? AI is our attempt to create a machine that thinks (or acts) humanly (or rationally) Think like a human Cognitive Modeling Think rationally Logic-based Systems
KI-Programmierung. Basic Search Algorithms
 KI-Programmierung Basic Search Algorithms Bernhard Beckert UNIVERSITÄT KOBLENZ-LANDAU Winter Term 2007/2008 B. Beckert: KI-Programmierung p.1 Example: Travelling in Romania Scenario On holiday in Romania;
KI-Programmierung Basic Search Algorithms Bernhard Beckert UNIVERSITÄT KOBLENZ-LANDAU Winter Term 2007/2008 B. Beckert: KI-Programmierung p.1 Example: Travelling in Romania Scenario On holiday in Romania;
Problem Solving. Russell and Norvig: Chapter 3
 Problem Solving Russell and Norvig: Chapter 3 Example: Route finding Example: 8-puzzle 8 2 3 4 7 6 5 6 Initial state 7 8 Goal state Example: 8-puzzle 8 2 7 8 2 3 4 5 6 3 4 7 5 6 8 2 8 2 3 4 7 3 4 7 5 6
Problem Solving Russell and Norvig: Chapter 3 Example: Route finding Example: 8-puzzle 8 2 3 4 7 6 5 6 Initial state 7 8 Goal state Example: 8-puzzle 8 2 7 8 2 3 4 5 6 3 4 7 5 6 8 2 8 2 3 4 7 3 4 7 5 6
Uninformed search strategies (Section 3.4) Source: Fotolia
 Source: Fotolia") Uninformed search strategies (Section 3.4) Source: Fotolia Uninformed search strategies A search strategy is defined by picking the order of node expansion Uninformed search strategies use only the information
Uninformed search strategies (Section 3.4) Source: Fotolia Uninformed search strategies A search strategy is defined by picking the order of node expansion Uninformed search strategies use only the information
Informed search algorithms
 Artificial Intelligence Topic 4 Informed search algorithms Best-first search Greedy search A search Admissible heuristics Memory-bounded search IDA SMA Reading: Russell and Norvig, Chapter 4, Sections
Artificial Intelligence Topic 4 Informed search algorithms Best-first search Greedy search A search Admissible heuristics Memory-bounded search IDA SMA Reading: Russell and Norvig, Chapter 4, Sections
Solving problems by searching
 Solving problems by searching Chapter 3 Some slide credits to Hwee Tou Ng (Singapore) Outline Problem-solving agents Problem types Problem formulation Example problems Basic search algorithms Heuristics
Solving problems by searching Chapter 3 Some slide credits to Hwee Tou Ng (Singapore) Outline Problem-solving agents Problem types Problem formulation Example problems Basic search algorithms Heuristics
CS 771 Artificial Intelligence. Informed Search
 CS 771 Artificial Intelligence Informed Search Outline Review limitations of uninformed search methods Informed (or heuristic) search Uses problem-specific heuristics to improve efficiency Best-first,
CS 771 Artificial Intelligence Informed Search Outline Review limitations of uninformed search methods Informed (or heuristic) search Uses problem-specific heuristics to improve efficiency Best-first,
Solving problems by searching
 Solving problems by searching 1 C H A P T E R 3 Problem-solving agents Problem types Problem formulation Example problems Basic search algorithms Outline 2 Problem-solving agents 3 Note: this is offline
Solving problems by searching 1 C H A P T E R 3 Problem-solving agents Problem types Problem formulation Example problems Basic search algorithms Outline 2 Problem-solving agents 3 Note: this is offline
Artificial Intelligence
 Artificial Intelligence hapter 1 hapter 1 1 Iterative deepening search function Iterative-Deepening-Search( problem) returns a solution inputs: problem, a problem for depth 0 to do result Depth-Limited-Search(
Artificial Intelligence hapter 1 hapter 1 1 Iterative deepening search function Iterative-Deepening-Search( problem) returns a solution inputs: problem, a problem for depth 0 to do result Depth-Limited-Search(
COMP219: Artificial Intelligence. Lecture 7: Search Strategies
 COMP219: Artificial Intelligence Lecture 7: Search Strategies 1 Overview Last time basic ideas about problem solving; state space; solutions as paths; the notion of solution cost; the importance of using
COMP219: Artificial Intelligence Lecture 7: Search Strategies 1 Overview Last time basic ideas about problem solving; state space; solutions as paths; the notion of solution cost; the importance of using
CS:4420 Artificial Intelligence
 CS:4420 Artificial Intelligence Spring 2018 Informed Search Cesare Tinelli The University of Iowa Copyright 2004 18, Cesare Tinelli and Stuart Russell a a These notes were originally developed by Stuart
CS:4420 Artificial Intelligence Spring 2018 Informed Search Cesare Tinelli The University of Iowa Copyright 2004 18, Cesare Tinelli and Stuart Russell a a These notes were originally developed by Stuart
Goal-Based Agents Problem solving as search. Outline
 Goal-Based Agents Problem solving as search Vasant Honavar Bioinformatics and Computational Biology Program Center for Computational Intelligence, Learning, & Discovery honavar@cs.iastate.edu www.cs.iastate.edu/~honavar/
Goal-Based Agents Problem solving as search Vasant Honavar Bioinformatics and Computational Biology Program Center for Computational Intelligence, Learning, & Discovery honavar@cs.iastate.edu www.cs.iastate.edu/~honavar/
Solving problems by searching
 Solving problems by searching Chapter 3 Systems 1 Outline Problem-solving agents Problem types Problem formulation Example problems Basic search algorithms Systems 2 Problem-solving agents Systems 3 Example:
Solving problems by searching Chapter 3 Systems 1 Outline Problem-solving agents Problem types Problem formulation Example problems Basic search algorithms Systems 2 Problem-solving agents Systems 3 Example:
EE562 ARTIFICIAL INTELLIGENCE FOR ENGINEERS
 EE562 ARTIFICIAL INTELLIGENCE FOR ENGINEERS Lecture 3, 4/6/2005 University of Washington, Department of Electrical Engineering Spring 2005 Instructor: Professor Jeff A. Bilmes 4/6/2005 EE562 1 Today: Basic
EE562 ARTIFICIAL INTELLIGENCE FOR ENGINEERS Lecture 3, 4/6/2005 University of Washington, Department of Electrical Engineering Spring 2005 Instructor: Professor Jeff A. Bilmes 4/6/2005 EE562 1 Today: Basic
ARTIFICIAL INTELLIGENCE (CSC9YE ) LECTURES 2 AND 3: PROBLEM SOLVING
 LECTURES 2 AND 3: PROBLEM SOLVING") ARTIFICIAL INTELLIGENCE (CSC9YE ) LECTURES 2 AND 3: PROBLEM SOLVING BY SEARCH Gabriela Ochoa http://www.cs.stir.ac.uk/~goc/ OUTLINE Problem solving by searching Problem formulation Example problems Search
ARTIFICIAL INTELLIGENCE (CSC9YE ) LECTURES 2 AND 3: PROBLEM SOLVING BY SEARCH Gabriela Ochoa http://www.cs.stir.ac.uk/~goc/ OUTLINE Problem solving by searching Problem formulation Example problems Search
DIT411/TIN175, Artificial Intelligence. Peter Ljunglöf. 19 January, 2018
 DIT411/TIN175, Artificial Intelligence Chapter 3: Classical search algorithms CHAPTER 3: CLASSICAL SEARCH ALGORITHMS DIT411/TIN175, Artificial Intelligence Peter Ljunglöf 19 January, 2018 1 DEADLINE FOR
DIT411/TIN175, Artificial Intelligence Chapter 3: Classical search algorithms CHAPTER 3: CLASSICAL SEARCH ALGORITHMS DIT411/TIN175, Artificial Intelligence Peter Ljunglöf 19 January, 2018 1 DEADLINE FOR
Problem solving and search
 Problem solving and search Chapter 3 TB Artificial Intelligence Slides from AIMA http://aima.cs.berkeley.edu 1 /1 Outline Problem-solving agents Problem types Problem formulation Example problems Basic
Problem solving and search Chapter 3 TB Artificial Intelligence Slides from AIMA http://aima.cs.berkeley.edu 1 /1 Outline Problem-solving agents Problem types Problem formulation Example problems Basic
Wissensverarbeitung. - Search - Alexander Felfernig und Gerald Steinbauer Institut für Softwaretechnologie Inffeldgasse 16b/2 A-8010 Graz Austria
 - Search - Alexander Felfernig und Gerald Steinbauer Institut für Softwaretechnologie Inffeldgasse 16b/2 A-8010 Graz Austria 1 References Skriptum (TU Wien, Institut für Informationssysteme, Thomas Eiter
- Search - Alexander Felfernig und Gerald Steinbauer Institut für Softwaretechnologie Inffeldgasse 16b/2 A-8010 Graz Austria 1 References Skriptum (TU Wien, Institut für Informationssysteme, Thomas Eiter
Chapter 2. Blind Search 8/19/2017
 Chapter 2 1 8/19/2017 Problem-solving agents Problem types Problem formulation Example problems Basic search algorithms 8/19/2017 2 8/19/2017 3 On holiday in Romania; currently in Arad. Flight leaves tomorrow
Chapter 2 1 8/19/2017 Problem-solving agents Problem types Problem formulation Example problems Basic search algorithms 8/19/2017 2 8/19/2017 3 On holiday in Romania; currently in Arad. Flight leaves tomorrow
Lecture 3. Uninformed Search
 Lecture 3 Uninformed Search 1 Uninformed search strategies Uninformed: While searching you have no clue whether one non-goal state is better than any other. Your search is blind. You don t know if your
Lecture 3 Uninformed Search 1 Uninformed search strategies Uninformed: While searching you have no clue whether one non-goal state is better than any other. Your search is blind. You don t know if your
Graphs vs trees up front; use grid too; discuss for BFS, DFS, IDS, UCS Cut back on A* optimality detail; a bit more on importance of heuristics,
 Graphs vs trees up front; use grid too; discuss for BFS, DFS, IDS, UCS Cut back on A* optimality detail; a bit more on importance of heuristics, performance data Pattern DBs? General Tree Search function
Graphs vs trees up front; use grid too; discuss for BFS, DFS, IDS, UCS Cut back on A* optimality detail; a bit more on importance of heuristics, performance data Pattern DBs? General Tree Search function
CS 380: Artificial Intelligence Lecture #3
 CS 380: Artificial Intelligence Lecture #3 William Regli Outline Problem-solving agents Problem types Problem formulation Example problems Basic search algorithms 1 Problem-solving agents Example: Romania
CS 380: Artificial Intelligence Lecture #3 William Regli Outline Problem-solving agents Problem types Problem formulation Example problems Basic search algorithms 1 Problem-solving agents Example: Romania
Informed search methods
 CS 2710 Foundations of AI Lecture 5 Informed search methods Milos Hauskrecht milos@pitt.edu 5329 Sennott Square Announcements Homework assignment 2 is out Due on Tuesday, September 19, 2017 before the
CS 2710 Foundations of AI Lecture 5 Informed search methods Milos Hauskrecht milos@pitt.edu 5329 Sennott Square Announcements Homework assignment 2 is out Due on Tuesday, September 19, 2017 before the
Informed search strategies (Section ) Source: Fotolia
 Source: Fotolia") Informed search strategies (Section 3.5-3.6) Source: Fotolia Review: Tree search Initialize the frontier using the starting state While the frontier is not empty Choose a frontier node to expand according
Informed search strategies (Section 3.5-3.6) Source: Fotolia Review: Tree search Initialize the frontier using the starting state While the frontier is not empty Choose a frontier node to expand according
Informed Search and Exploration
 Ch. 04 p.1/39 Informed Search and Exploration Chapter 4 Ch. 04 p.2/39 Outline Best-first search A search Heuristics IDA search Hill-climbing Simulated annealing Ch. 04 p.3/39 Review: Tree search function
Ch. 04 p.1/39 Informed Search and Exploration Chapter 4 Ch. 04 p.2/39 Outline Best-first search A search Heuristics IDA search Hill-climbing Simulated annealing Ch. 04 p.3/39 Review: Tree search function
Solving problems by searching. Chapter 3
 Solving problems by searching Chapter 3 Outline Problem-solving agents Problem types Problem formulation Example problems Basic search algorithms 2 Example: Romania On holiday in Romania; currently in
Solving problems by searching Chapter 3 Outline Problem-solving agents Problem types Problem formulation Example problems Basic search algorithms 2 Example: Romania On holiday in Romania; currently in
Informed Search. Dr. Richard J. Povinelli. Copyright Richard J. Povinelli Page 1
 Informed Search Dr. Richard J. Povinelli Copyright Richard J. Povinelli Page 1 rev 1.1, 9/25/2001 Objectives You should be able to explain and contrast uniformed and informed searches. be able to compare,
Informed Search Dr. Richard J. Povinelli Copyright Richard J. Povinelli Page 1 rev 1.1, 9/25/2001 Objectives You should be able to explain and contrast uniformed and informed searches. be able to compare,
Topic 1 Uninformed Search
 Topic 1 Uninformed Search [George F Luger. 2008. Artificial Intelligence Structures and Strategies for Complex Problem Solving. 6 th Ed. Pearson. ISBN: 0321545893.] 1 Contents 1. Depth-First Search (DFS)
Topic 1 Uninformed Search [George F Luger. 2008. Artificial Intelligence Structures and Strategies for Complex Problem Solving. 6 th Ed. Pearson. ISBN: 0321545893.] 1 Contents 1. Depth-First Search (DFS)
Lecture 4: Search 3. Victor R. Lesser. CMPSCI 683 Fall 2010
 Lecture 4: Search 3 Victor R. Lesser CMPSCI 683 Fall 2010 First Homework 1 st Programming Assignment 2 separate parts (homeworks) First part due on (9/27) at 5pm Second part due on 10/13 at 5pm Send homework
Lecture 4: Search 3 Victor R. Lesser CMPSCI 683 Fall 2010 First Homework 1 st Programming Assignment 2 separate parts (homeworks) First part due on (9/27) at 5pm Second part due on 10/13 at 5pm Send homework
Solving Problems: Blind Search
 Solving Problems: Blind Search Instructor: B. John Oommen Chancellor s Professor Fellow: IEEE ; Fellow: IAPR School of Computer Science, Carleton University, Canada The primary source of these notes are
Solving Problems: Blind Search Instructor: B. John Oommen Chancellor s Professor Fellow: IEEE ; Fellow: IAPR School of Computer Science, Carleton University, Canada The primary source of these notes are
Graph Search. Chris Amato Northeastern University. Some images and slides are used from: Rob Platt, CS188 UC Berkeley, AIMA
 Graph Search Chris Amato Northeastern University Some images and slides are used from: Rob Platt, CS188 UC Berkeley, AIMA What is graph search? Start state Goal state Graph search: find a path from start
Graph Search Chris Amato Northeastern University Some images and slides are used from: Rob Platt, CS188 UC Berkeley, AIMA What is graph search? Start state Goal state Graph search: find a path from start
Why Search. Things to consider. Example, a holiday in Jamaica. CSE 3401: Intro to Artificial Intelligence Uninformed Search
 CSE 3401: Intro to Artificial Intelligence Uninformed Search Why Search Required Readings: R & N Chapter 3, Sec. 1-4. Lecture slides adapted from those of Fahiem Bacchus. Successful Success in game playing
CSE 3401: Intro to Artificial Intelligence Uninformed Search Why Search Required Readings: R & N Chapter 3, Sec. 1-4. Lecture slides adapted from those of Fahiem Bacchus. Successful Success in game playing
PEAS: Medical diagnosis system
 PEAS: Medical diagnosis system Performance measure Patient health, cost, reputation Environment Patients, medical staff, insurers, courts Actuators Screen display, email Sensors Keyboard/mouse Environment
PEAS: Medical diagnosis system Performance measure Patient health, cost, reputation Environment Patients, medical staff, insurers, courts Actuators Screen display, email Sensors Keyboard/mouse Environment
Outline. Solving problems by searching. Problem-solving agents. Example: Romania
 Outline Solving problems by searching Chapter 3 Problem-solving agents Problem types Problem formulation Example problems Basic search algorithms Systems 1 Systems 2 Problem-solving agents Example: Romania
Outline Solving problems by searching Chapter 3 Problem-solving agents Problem types Problem formulation Example problems Basic search algorithms Systems 1 Systems 2 Problem-solving agents Example: Romania
Solving Problems by Searching
 INF5390 Kunstig intelligens Sony Vaio VPC-Z12 Solving Problems by Searching Roar Fjellheim Outline Problem-solving agents Example problems Search programs Uninformed search Informed search Summary AIMA
INF5390 Kunstig intelligens Sony Vaio VPC-Z12 Solving Problems by Searching Roar Fjellheim Outline Problem-solving agents Example problems Search programs Uninformed search Informed search Summary AIMA
Ar#ficial)Intelligence!!
Intelligence!!") Introduc*on! Ar#ficial)Intelligence!! Roman Barták Department of Theoretical Computer Science and Mathematical Logic Uninformed (blind) search algorithms can find an (optimal) solution to the problem,
Introduc*on! Ar#ficial)Intelligence!! Roman Barták Department of Theoretical Computer Science and Mathematical Logic Uninformed (blind) search algorithms can find an (optimal) solution to the problem,
Introduction to Artificial Intelligence. Informed Search
 Introduction to Artificial Intelligence Informed Search Bernhard Beckert UNIVERSITÄT KOBLENZ-LANDAU Winter Term 2004/2005 B. Beckert: KI für IM p.1 Outline Best-first search A search Heuristics B. Beckert:
Introduction to Artificial Intelligence Informed Search Bernhard Beckert UNIVERSITÄT KOBLENZ-LANDAU Winter Term 2004/2005 B. Beckert: KI für IM p.1 Outline Best-first search A search Heuristics B. Beckert:
Solving Problems by Searching
 INF5390 Kunstig intelligens Solving Problems by Searching Roar Fjellheim Outline Problem-solving agents Example problems Search programs Uninformed search Informed search Summary AIMA Chapter 3: Solving
INF5390 Kunstig intelligens Solving Problems by Searching Roar Fjellheim Outline Problem-solving agents Example problems Search programs Uninformed search Informed search Summary AIMA Chapter 3: Solving
Informed search algorithms. Chapter 4, Sections 1 2 1
 Informed search algorithms Chapter 4, Sections 1 2 Chapter 4, Sections 1 2 1 Outline Best-first search A search Heuristics Chapter 4, Sections 1 2 2 Review: Tree search function Tree-Search( problem, fringe)
Informed search algorithms Chapter 4, Sections 1 2 Chapter 4, Sections 1 2 1 Outline Best-first search A search Heuristics Chapter 4, Sections 1 2 2 Review: Tree search function Tree-Search( problem, fringe)
Informed search algorithms
 Informed search algorithms Chapter 4, Sections 1 2 Chapter 4, Sections 1 2 1 Outline Best-first search A search Heuristics Chapter 4, Sections 1 2 2 Review: Tree search function Tree-Search( problem, fringe)
Informed search algorithms Chapter 4, Sections 1 2 Chapter 4, Sections 1 2 1 Outline Best-first search A search Heuristics Chapter 4, Sections 1 2 2 Review: Tree search function Tree-Search( problem, fringe)
Artificial Intelligence Problem Solving and Uninformed Search
 Artificial Intelligence Problem Solving and Uninformed Search Maurizio Martelli, Viviana Mascardi {martelli, mascardi}@disi.unige.it University of Genoa Department of Computer and Information Science AI,
Artificial Intelligence Problem Solving and Uninformed Search Maurizio Martelli, Viviana Mascardi {martelli, mascardi}@disi.unige.it University of Genoa Department of Computer and Information Science AI,
Artificial Intelligence Uninformed search
 Artificial Intelligence Uninformed search A.I. Uninformed search 1 The symbols&search hypothesis for AI Problem-solving agents A kind of goal-based agent Problem types Single state (fully observable) Search
Artificial Intelligence Uninformed search A.I. Uninformed search 1 The symbols&search hypothesis for AI Problem-solving agents A kind of goal-based agent Problem types Single state (fully observable) Search
Uninformed Search. Chapter 3
 Uninformed Search Chapter 3 (Based on slides by Stuart Russell, Subbarao Kambhampati, Dan Weld, Oren Etzioni, Henry Kautz, Richard Korf, and other UW-AI faculty) Agent s Knowledge Representation Type State
Uninformed Search Chapter 3 (Based on slides by Stuart Russell, Subbarao Kambhampati, Dan Weld, Oren Etzioni, Henry Kautz, Richard Korf, and other UW-AI faculty) Agent s Knowledge Representation Type State
Uninformed (also called blind) search algorithms
 search algorithms") Uninformed (also called blind) search algorithms First Lecture Today (Thu 30 Jun) Read Chapters 18.6.1-2, 20.3.1 Second Lecture Today (Thu 30 Jun) Read Chapter 3.1-3.4 Next Lecture (Tue 5 Jul) Chapters
Uninformed (also called blind) search algorithms First Lecture Today (Thu 30 Jun) Read Chapters 18.6.1-2, 20.3.1 Second Lecture Today (Thu 30 Jun) Read Chapter 3.1-3.4 Next Lecture (Tue 5 Jul) Chapters
Solving Problems by Searching (Blindly)
") Solving Problems by Searching (Blindly) R&N: Chap. 3 (many of these slides borrowed from Stanford s AI Class) Problem Solving Agents Decide what to do by finding a sequence of actions that lead to desirable
Solving Problems by Searching (Blindly) R&N: Chap. 3 (many of these slides borrowed from Stanford s AI Class) Problem Solving Agents Decide what to do by finding a sequence of actions that lead to desirable
Artificial Intelligence
 Artificial Intelligence Dr Ahmed Rafat Abas Computer Science Dept, Faculty of Computers and Informatics, Zagazig University arabas@zu.edu.eg http://www.arsaliem.faculty.zu.edu.eg/ Solving problems by searching
Artificial Intelligence Dr Ahmed Rafat Abas Computer Science Dept, Faculty of Computers and Informatics, Zagazig University arabas@zu.edu.eg http://www.arsaliem.faculty.zu.edu.eg/ Solving problems by searching
Problem solving and search
 Problem solving and search Chapter 3 Chapter 3 1 Problem formulation & examples Basic search algorithms Outline Chapter 3 2 On holiday in Romania; currently in Arad. Flight leaves tomorrow from Bucharest
Problem solving and search Chapter 3 Chapter 3 1 Problem formulation & examples Basic search algorithms Outline Chapter 3 2 On holiday in Romania; currently in Arad. Flight leaves tomorrow from Bucharest
Solving Problems using Search
 Solving Problems using Search Artificial Intelligence @ Allegheny College Janyl Jumadinova September 11, 2018 Janyl Jumadinova Solving Problems using Search September 11, 2018 1 / 35 Example: Romania On
Solving Problems using Search Artificial Intelligence @ Allegheny College Janyl Jumadinova September 11, 2018 Janyl Jumadinova Solving Problems using Search September 11, 2018 1 / 35 Example: Romania On
Expert Systems (Graz) Heuristic Search (Klagenfurt) - Search -
 Heuristic Search (Klagenfurt) - Search -") Expert Systems (Graz) Heuristic Search (Klagenfurt) - Search - Institut für Softwaretechnologie Inffeldgasse 16b/2 A-8010 Graz Austria 1 References Skriptum (TU Wien, Institut für Informationssysteme,
Expert Systems (Graz) Heuristic Search (Klagenfurt) - Search - Institut für Softwaretechnologie Inffeldgasse 16b/2 A-8010 Graz Austria 1 References Skriptum (TU Wien, Institut für Informationssysteme,
Vorlesung Grundlagen der Künstlichen Intelligenz
 Vorlesung Grundlagen der Künstlichen Intelligenz Reinhard Lafrenz / Prof. A. Knoll Robotics and Embedded Systems Department of Informatics I6 Technische Universität München www6.in.tum.de lafrenz@in.tum.de
Vorlesung Grundlagen der Künstlichen Intelligenz Reinhard Lafrenz / Prof. A. Knoll Robotics and Embedded Systems Department of Informatics I6 Technische Universität München www6.in.tum.de lafrenz@in.tum.de
Informed Search and Exploration
 Informed Search and Exploration Chapter 4 (4.1-4.3) CS 2710 1 Introduction Ch.3 searches good building blocks for learning about search But vastly inefficient eg: Can we do better? Breadth Depth Uniform
Informed Search and Exploration Chapter 4 (4.1-4.3) CS 2710 1 Introduction Ch.3 searches good building blocks for learning about search But vastly inefficient eg: Can we do better? Breadth Depth Uniform
Uninformed Search Methods
 Uninformed Search Methods Search Algorithms Uninformed Blind search Breadth-first uniform first depth-first Iterative deepening depth-first Bidirectional Branch and Bound Informed Heuristic search Greedy
Uninformed Search Methods Search Algorithms Uninformed Blind search Breadth-first uniform first depth-first Iterative deepening depth-first Bidirectional Branch and Bound Informed Heuristic search Greedy
Search Algorithms. Uninformed Blind search. Informed Heuristic search. Important concepts:
 Uninformed Search Search Algorithms Uninformed Blind search Breadth-first uniform first depth-first Iterative deepening depth-first Bidirectional Branch and Bound Informed Heuristic search Greedy search,
Uninformed Search Search Algorithms Uninformed Blind search Breadth-first uniform first depth-first Iterative deepening depth-first Bidirectional Branch and Bound Informed Heuristic search Greedy search,