Set 2: State-spaces and Uninformed Search. ICS 271 Fall 2015 Kalev Kask
|
|
|
- Frederick Warren
- 6 years ago
- Views:
Transcription
1 Set 2: State-spaces and Uninformed Search ICS 271 Fall 2015 Kalev Kask
2 You need to know State-space based problem formulation State space (graph) Search space Nodes vs. states Tree search vs graph search Search strategies Analysis of search algorithms Completeness, optimality, complexity b, d, m

3 Goal-based agents Goals provide reason to prefer one action over the other. We need to predict the future: we need to plan & search
4 Problem-Solving Agents Intelligent agents can solve problems by searching a state-space State-space Model the agent s model of the world usually a set of discrete states e.g., in driving, the states in the model could be towns/cities Goal State(s) a goal is defined as a desirable state for an agent there may be many states which satisfy the goal e.g., drive to a town with a ski-resort or just one state which satisfies the goal e.g., drive to Mammoth Operators(actions) operators are legal actions which the agent can take to move from one state to another
5 Example: Romania
6 Example: Romania On holiday in Romania; currently in Arad. Flight leaves tomorrow from Bucharest Formulate goal: be in Bucharest Formulate problem: states: various cities actions: drive between cities Find solution: sequence of actions (cities), e.g., Arad, Sibiu, Fagaras, Bucharest
7 Problem Types Static / Dynamic Previous problem was static: no attention to changes in environment Observable / Partially Observable / Unobservable Previous problem was observable: it knew its initial state. Deterministic / Stochastic Previous problem was deterministic: no new percepts were necessary, we can predict the future perfectly Discrete / continuous Previous problem was discrete: we can enumerate all possibilities
8 A problem is defined by five items: states e.g. cities initial state e.g., "at Arad actions or successor function S(x) = set of action state pairs e.g., S(Arad) = {<Arad Zerind, Zerind>, } transition function - maps action & state state goal test, (or goal state) e.g., x = "at Bucharest, Checkmate(x) path cost (additive) e.g., sum of distances, number of actions executed, etc. c(x,a,y) is the step cost, assumed to be 0 A solution is a sequence of actions leading from the initial state to a goal state State-Space Problem Formulation
9 State-Space Problem Formulation A statement of a Search problem has components 1. States 2. A start state S 3. A set of operators/actions which allow one to get from one state to another 4. transition function 5. A set of possible goal states G, or ways to test for goal states 6. Cost path A solution consists of a sequence of operators which transform S into a goal state G Representing real problems in a State-Space search framework may be many ways to represent states and operators key idea: represent only the relevant aspects of the problem (abstraction)
10 Abstraction/Modeling Definition of Abstraction (states/actions) Process of removing irrelevant detail to create an abstract representation: ``high-level, ignores irrelevant details Navigation Example: how do we define states and operators? First step is to abstract the big picture i.e., solve a map problem nodes = cities, links = freeways/roads (a high-level description) this description is an abstraction of the real problem Can later worry about details like freeway onramps, refueling, etc Abstraction is critical for automated problem solving must create an approximate, simplified, model of the world for the computer to deal with: real-world is too detailed to model exactly good abstractions retain all important details an abstraction should be easier to solve than the original problem
11 Robot block world Given a set of blocks in a certain configuration, Move the blocks into a goal configuration. Example : ((A)(B)(C)) (ACB) A A B C C B
12 Operator Description
13 The State-Space Graph Problem formulation: Give an abstract description of states, operators, initial state and goal state. Graphs: vertices, edges(arcs), directed arcs, paths State-space graphs: States are vertices operators are directed arcs solution is a path from start to goal Problem solving activity: State-space: 1. A set of states 2. A set of operators /transitions 3. A start state S 4. A set of possible goal states 5. Cost path Generate a part of the search space that contains a solution
14 Example: vacuum world Observable, start in #5. Solution? 15
15 Example: vacuum world Observable, start in #5. Solution? [Right, Suck] 16
16 Vacuum world state space graph 5 17
17 Example: vacuum world Unobservable, start in {1,2,3,4,5,6,7,8} e.g., Solution? 18
18 Example: vacuum world Unobservable, start in {1,2,3,4,5,6,7,8} e.g., Solution? [Right,Suck,Left,Suck] 19
19 20
20 The Traveling Salesperson Problem Find the shortest tour that visits all cities without visiting any city twice and return to starting point. State: sequence of cities visited S 0 = A C B A F D E
21 The Traveling Salesperson Problem Find the shortest tour that visits all cities without visiting any city twice and return to starting point. State: sequence of cities visited S 0 = A C Solution = a complete tour B Transition model A F D { a, c, d} {( a, c, d, x) X a, c, d} E
22 Example: 8-queen problem
, -or arrangements of n<=8 queens in leftmost n columns, 1 per column, such")
23 Example: 8-Queens states? -any arrangement of n<=8 queens -or arrangements of n<=8 queens, 1 per column, such that no queen attacks any other (BETTER), -or arrangements of n<=8 queens in leftmost n columns, 1 per column, such that no queen attacks any other (BEST) initial state? no queens on the board actions? -add queen to any empty column -or add queen to leftmost empty column such that it is not attacked by other queens. goal test? 8 queens on the board, none attacked. path cost? 1 per move
24 The Sliding Tile Problem move( x, loc y, loc z) Up Down Left Right
25 The 8-Puzzle Problem Start State Goal State
26 Example: robotic assembly states?: real-valued coordinates of robot joint angles parts of the object to be assembled actions?: continuous motions of robot joints goal test?: complete assembly path cost?: time to execute new
27 Problem types Formulating Problems; Another Angle Satisfying: 8-queen Optimizing: Traveling salesperson For traveling salesperson satisfying easy, optimizing hard Goal types board configuration sequence of moves A strategy (contingency plan) Satisfying leads to optimizing since small is quick For traveling salesperson satisfying easy, optimizing hard Semi-optimizing: Find a good solution In Russel and Norvig: single-state, multiple states, contingency plans, exploration problems
28 Searching the State Space Exploration of the state space states, operators by generating successors of already explored states (aka expanding states) The search space graph is implicit Control strategy generates a search tree. Systematic search Do not leave any stone unturned Efficiency Do not turn any stone more than once

29 Tree search example
30 Tree search example
31 Tree search example
32 State-Space Graph of the 8 Puzzle Problem
33 Implementation States vs Nodes A state is a (representation of) a physical configuration A node is a data structure constituting part of a search tree contains info such as: state, parent node, action, path cost g(x), depth The Expand function creates new nodes, filling in the various fields and using the SuccessorFn of the problem to create the corresponding states. Queue managing frontier : FIFO LIFO priority
34 Tree-Search vs Graph-Search Tree-search(problem), returns a solution or failure Frontier initial state Loop do If frontier is empty return failure Choose a leaf node and remove from frontier If the node is a goal, return the corresponding solution Expand the chosen node, adding its children to the frontier Graph-search(problem), returns a solution or failure Frontier initial state, explored empty Loop do If frontier is empty return failure Choose a leaf node and remove from frontier If the node is a goal, return the corresponding solution. Add the node to the explored. Expand the chosen node, adding its children to the frontier, only if not in frontier or explored set
35 We have 3 kinds of states Basic search scheme explored (past) only graph search frontier (current) unexplored (future) implicitly given Initially frontier=start state Loop until found solution or exhausted state space pick/remove first node from frontier using search strategy priority queue FIFO (BFS), LIFO (DFS), g (UCS), f (A*), etc. add this node to explored, expand this node, add children to frontier (graph search : only those children whose state is not in explored list) Q: what if better path is found to a node already on explored list?
36 Graph-Search
37 Tree-Search vs. Graph-Search Example : Assemble 5 objects {a, b, c, d, e} A state is a bit-vector (length 5), 1=object in assembly = a, b, d in assembly, c, e not State space number of states 2 5 = 32 number of edges (2 5 ) 5 ½ = 80 Tree-search space number of nodes 5! = 120 State can be reached in multiple ways can be reached a+b+d or a+d+b etc. Graph-search : three kinds of nodes : unexplored, frontier, explored before adding a node, check if a state is in frontier or explored set
38 Why Search Can be Difficult At the start of the search, the search algorithm does not know the size of the tree the shape of the tree the depth of the goal states How big can a search tree be? say there is a constant branching factor b and one goal exists at depth d search tree which includes a goal can have b d different branches in the tree (worst case) Examples: b = 2, d = 10: b d = 2 10 = 1024 b = 10, d = 10: b d = = 10,000,000,000
39 Searching the Search Space Uninformed (Blind) search : don t know if a state is good Breadth-first Uniform-Cost first Depth-first Iterative deepening depth-first Bidirectional Depth-First Branch and Bound Informed Heuristic search : have evaluation fn for states Greedy search, hill climbing, Heuristics Important concepts: Completeness : does it always find a solution if one exists? Time complexity (b, d, m) Space complexity (b, d, m) Quality of solution : optimality = does it always find best solution?
40 Search strategies A search strategy is defined by picking the order of node expansion Strategies are evaluated along the following dimensions: completeness: does it always find a solution if one exists? time complexity: number of nodes generated space complexity: maximum number of nodes in memory optimality: does it always find a least-cost solution? Time and space complexity are measured in terms of b: maximum branching factor of the search tree d: depth of the least-cost solution m: maximum depth of the state space (may be ) 42
 queue, i.e., new successors go at end of the queue.")
41 Breadth-First Search Expand shallowest unexpanded node Frontier: nodes waiting in a queue to be explored, also called OPEN Implementation: frontier is a first-in-first-out (FIFO) queue, i.e., new successors go at end of the queue. Is A a goal state?

42 Breadth-First Search Expand shallowest unexpanded node Implementation: frontier is a FIFO queue, i.e., new successors go at end Expand: frontier = [B,C] Is B a goal state?
43 Breadth-First Search Expand shallowest unexpanded node Implementation: frontier is a FIFO queue, i.e., new successors go at end Expand: frontier=[c,d,e] Is C a goal state?
44 Breadth-First Search Expand shallowest unexpanded node Implementation: frontier is a FIFO queue, i.e., new successors go at end Expand: frontier=[d,e,f,g] Is D a goal state?
45 Breadth-First Search Actually, in BFS we can check if a node is a goal node when it is generated (rather than expanded)
46 Breadth-First-Search (*) 1. Put the start node s on OPEN OPEN = frontier, CLOSED = explored 2. If OPEN is empty exit with failure. 3. Remove the first node n from OPEN and place it on CLOSED. 4. Expand n, generating all its successors. If child is not in CLOSED or OPEN, then If child is not a goal, then put them at the end of OPEN in some order. 5. If n is a goal node, exit successfully with the solution obtained by tracing back pointers from n to s. Go to step 2. * This is graph-search
47 Example: Map Navigation A B C S G D E F S = start, G = goal, other nodes = intermediate states, links = legal transitions
48 Initial BFS Search Tree A S D B D A E C E Not expanded by graph-search A B C Note: this is the search tree at some particular point in in the search. S D E F G
49 Complexity of Breadth-First Search Time Complexity assume (worst case) that there is 1 goal leaf at the RHS so BFS will expand all nodes = 1 + b + b b d = O (b d ) G d=0 d=1 d=2 Space Complexity how many nodes can be in the queue (worst-case)? at depth d there are b d unexpanded nodes in the Q = O (b d ) G d=0 d=1 d=2
50 Examples of Time and Memory Requirements for Breadth-First Search Depth of Nodes Solution Expanded Time Memory millisecond 100 bytes seconds 11 kbytes 4 11, seconds 1 megabyte hours 11 giabytes years 111 terabytes Assuming b=10, 1000 nodes/sec, 100 bytes/node
51 Breadth-First Search (BFS) Properties Solution Length: optimal Expand each node once (can check for duplicates, performs graph-search) Search Time: O(b d ) Memory Required: O(b d ) Drawback: requires exponential space
52 Uniform Cost Search Expand lowest-cost OPEN node (g(n)) In BFS g(n) = depth(n) Requirement g(successor)(n)) g(n)

53 Uniform cost search 1. Put the start node s on OPEN 2. If OPEN is empty exit with failure. 3. Remove the first node n from OPEN and place it on CLOSED. 4. If n is a goal node, exit successfully with the solution obtained by tracing back pointers from n to s. 5. Otherwise, expand n, generating all its successors attach to them pointers back to n, and put them in OPEN in order of shortest cost 6. Go to step 2. DFS Branch and Bound At step 4: compute the cost of the solution found and update the upper bound U. at step 5: expand n, generating all its successors attach to them pointers back to n, and put on top of OPEN. Compute cost of partial path to node and prune if larger than U..
54 Depth-First Search Expand deepest unexpanded node Implementation: frontier = Last In First Out (LIFO) queue, i.e., put successors at front Is A a goal state?
55 Depth-first search Expand deepest unexpanded node Implementation: frontier = LIFO queue, i.e., put successors at front queue=[b,c] Is B a goal state?
56 Depth-first search Expand deepest unexpanded node Implementation: frontier = LIFO queue, i.e., put successors at front queue=[d,e,c] Is D = goal state?
57 Depth-first search Expand deepest unexpanded node Implementation: frontier = LIFO queue, i.e., put successors at front queue=[h,i,e,c] Is H = goal state?
58 Depth-first search Expand deepest unexpanded node Implementation: frontier = LIFO queue, i.e., put successors at front queue=[i,e,c] Is I = goal state?
59 Depth-first search Expand deepest unexpanded node Implementation: frontier = LIFO queue, i.e., put successors at front queue=[e,c] Is E = goal state?
60 Depth-first search Expand deepest unexpanded node Implementation: frontier = LIFO queue, i.e., put successors at front queue=[j,k,c] Is J = goal state?
61 Depth-first search Expand deepest unexpanded node Implementation: frontier = LIFO queue, i.e., put successors at front queue=[k,c] Is K = goal state?
62 Depth-first search Expand deepest unexpanded node Implementation: frontier = LIFO queue, i.e., put successors at front queue=[c] Is C = goal state?
63 Depth-first search Expand deepest unexpanded node Implementation: frontier = LIFO queue, i.e., put successors at front queue=[f,g] Is F = goal state?

64 Depth-first search Expand deepest unexpanded node Implementation: frontier = LIFO queue, i.e., put successors at front queue=[l,m,g] Is L = goal state?
65 Depth-first search Expand deepest unexpanded node Implementation: frontier = LIFO queue, i.e., put successors at front queue=[m,g] Is M = goal state?
66 Depth-First Search (DFS) S A D B D S A B C G C E D E F D F G Here, (if tree-search) then to avoid infinite depth (in case of finite state-space graph) assume we don t expand any child node which appears already in the path from the root S to the parent. (Again, one could use other strategies)
67 Depth-First Search
68
69 Depth-First-Search (*) 1. Put the start node s on OPEN 2. If OPEN is empty exit with failure. 3. Remove the first node n from OPEN. 4. If n is a goal node, exit successfully with the solution obtained by tracing back pointers from n to s. 5. Otherwise, expand n, generating all its successors (check for self-loops)attach to them pointers back to n, and put them at the top of OPEN in some order. 6. Go to step 2. *search the tree search-space (but avoid self-loops) ** the default assumption is that DFS searches the underlying search-tree
70 Complexity of Depth-First Search? Time Complexity assume d is deepest path in the search space assume (worst case) that there is 1 goal leaf at the RHS so DFS will expand all nodes =1 + b + b b d = O (b d ) Space Complexity (for treesearch) how many nodes can be in the queue (worst-case)? O(bd) if deepest node at depth d d=0 d=1 d=2 G d=0 d=1 d=2 d=3 d=4
71 Breadth-First Search (BFS) Properties Solution Length: optimal Expand each node once (can check for duplicates, performs graph-search) Search Time: O(b d ) Memory Required: O(b d ) Drawback: requires exponential space
72 Example, Diamond Networks graph-search vs tree-search (BFS vs DFS) Graph-search & BFS Tree-search & DFS
73 Depth-First tree-search Properties Non-optimal solution path Incomplete unless there is a depth bound (we will assume depth-limited DF-search) Re-expansion of nodes (when the state-space is a graph) Exponential time Linear space (for tree-search)
74 Comparing DFS and BFS BFS optimal, DFS is not Time Complexity worse-case is the same, but In the worst-case BFS is always better than DFS Sometime, on the average DFS is better if: many goals, no loops and no infinite paths BFS is much worse memory-wise DFS can be linear space BFS may store the whole search space. In general BFS is better if goal is not deep, if long paths, if many loops, if small search space DFS is better if many goals, not many loops DFS is much better in terms of memory
75 Iterative-Deepening Search (DFS) Every iteration is a DFS with a depth cutoff. Iterative deepening (ID) 1. i = 1 2. While no solution, do 3. DFS from initial state S 0 with cutoff i 4. If found goal, stop and return solution, else, increment cutoff Comments: IDS implements BFS with DFS Only one path in memory BFS at step i may need to keep 2 i nodes in OPEN
76 Iterative deepening search L=0
77 Iterative deepening search L=1
78 Iterative deepening search L=2

79 Iterative Deepening Search L=3
80 Iterative deepening search
81 Iterative Deepening (DFS) 1 n 2 b j 1 n Time: ( ) b T n O( b ) n j 1 b 1 ( b 1) 2 BFS time is O(b n ), b is the branching degree IDS is asymptotically like BFS, For b=10 d=5 d=cut-off DFS = ,,=111,111 IDS = 123,456 Ratio is b b 1
82 Summary on IDS A useful practical method combines guarantee of finding an optimal solution if one exists (as in BFS) space efficiency, O(bd) of DFS But still has problems with loops like DFS
83 Bidirectional Search Idea simultaneously search forward from S and backwards from G stop when both meet in the middle need to keep track of the intersection of 2 open sets of nodes What does searching backwards from G mean need a way to specify the predecessors of G this can be difficult, e.g., predecessors of checkmate in chess? what if there are multiple goal states? what if there is only a goal test, no explicit list? Complexity time complexity is best: O(2 b (d/2) ) = O(b (d/2) ) memory complexity is the same
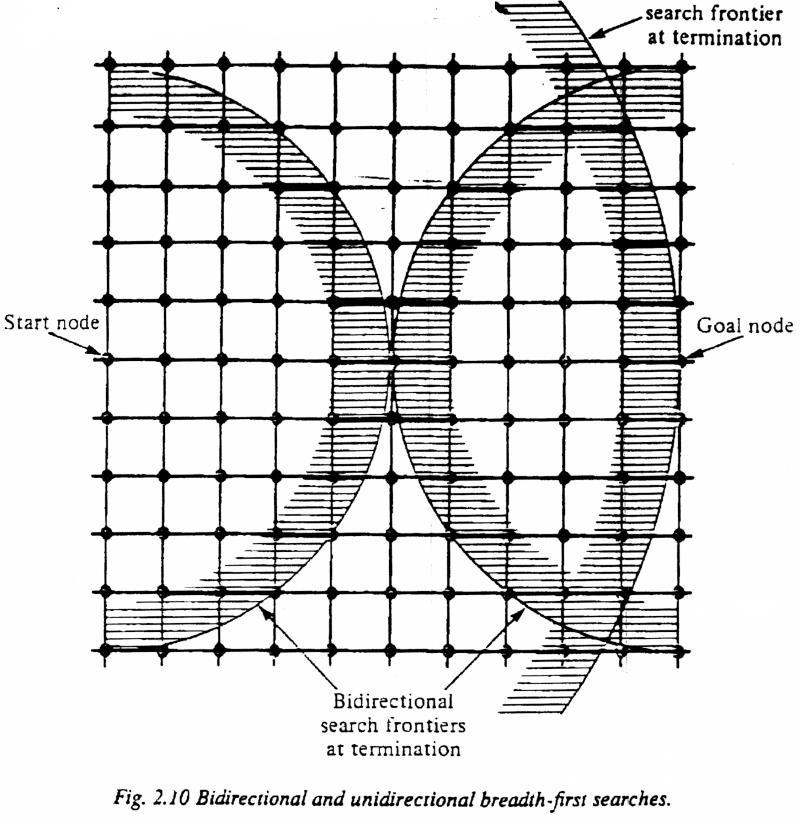
84 Bi-Directional Search

85 Comparison of Algorithms
86 Summary A review of search a search space consists of nodes and operators: it is a tree/graph There are various strategies for uninformed search breadth-first depth-first iterative deepening bidirectional search Uniform cost search Depth-first branch and bound Repeated states can lead to infinitely large search trees we looked at methods for detecting repeated states All of the search techniques so far are blind in that they do not look at how far away the goal may be: next we will look at informed or heuristic search, which directly tries to minimize the distance to the goal.
Search I. slides from: Padhraic Smyth, Bryan Low, S. Russell and P. Norvig
 Search I slides from: Padhraic Smyth, Bryan Low, S. Russell and P. Norvig Problem-Solving Agents Intelligent agents can solve problems by searching a state-space State-space Model the agent s model of
Search I slides from: Padhraic Smyth, Bryan Low, S. Russell and P. Norvig Problem-Solving Agents Intelligent agents can solve problems by searching a state-space State-space Model the agent s model of
Solving problems by searching
 Solving problems by searching Chapter 3 Systems 1 Outline Problem-solving agents Problem types Problem formulation Example problems Basic search algorithms Systems 2 Problem-solving agents Systems 3 Example:
Solving problems by searching Chapter 3 Systems 1 Outline Problem-solving agents Problem types Problem formulation Example problems Basic search algorithms Systems 2 Problem-solving agents Systems 3 Example:
Solving Problem by Searching. Chapter 3
 Solving Problem by Searching Chapter 3 Outline Problem-solving agents Problem formulation Example problems Basic search algorithms blind search Heuristic search strategies Heuristic functions Problem-solving
Solving Problem by Searching Chapter 3 Outline Problem-solving agents Problem formulation Example problems Basic search algorithms blind search Heuristic search strategies Heuristic functions Problem-solving
Outline. Solving problems by searching. Problem-solving agents. Example: Romania
 Outline Solving problems by searching Chapter 3 Problem-solving agents Problem types Problem formulation Example problems Basic search algorithms Systems 1 Systems 2 Problem-solving agents Example: Romania
Outline Solving problems by searching Chapter 3 Problem-solving agents Problem types Problem formulation Example problems Basic search algorithms Systems 1 Systems 2 Problem-solving agents Example: Romania
Chapter 2. Blind Search 8/19/2017
 Chapter 2 1 8/19/2017 Problem-solving agents Problem types Problem formulation Example problems Basic search algorithms 8/19/2017 2 8/19/2017 3 On holiday in Romania; currently in Arad. Flight leaves tomorrow
Chapter 2 1 8/19/2017 Problem-solving agents Problem types Problem formulation Example problems Basic search algorithms 8/19/2017 2 8/19/2017 3 On holiday in Romania; currently in Arad. Flight leaves tomorrow
CS 380: Artificial Intelligence Lecture #3
 CS 380: Artificial Intelligence Lecture #3 William Regli Outline Problem-solving agents Problem types Problem formulation Example problems Basic search algorithms 1 Problem-solving agents Example: Romania
CS 380: Artificial Intelligence Lecture #3 William Regli Outline Problem-solving agents Problem types Problem formulation Example problems Basic search algorithms 1 Problem-solving agents Example: Romania
EE562 ARTIFICIAL INTELLIGENCE FOR ENGINEERS
 EE562 ARTIFICIAL INTELLIGENCE FOR ENGINEERS Lecture 3, 4/6/2005 University of Washington, Department of Electrical Engineering Spring 2005 Instructor: Professor Jeff A. Bilmes 4/6/2005 EE562 1 Today: Basic
EE562 ARTIFICIAL INTELLIGENCE FOR ENGINEERS Lecture 3, 4/6/2005 University of Washington, Department of Electrical Engineering Spring 2005 Instructor: Professor Jeff A. Bilmes 4/6/2005 EE562 1 Today: Basic
Solving problems by searching. Chapter 3
 Solving problems by searching Chapter 3 Outline Problem-solving agents Problem types Problem formulation Example problems Basic search algorithms 2 Example: Romania On holiday in Romania; currently in
Solving problems by searching Chapter 3 Outline Problem-solving agents Problem types Problem formulation Example problems Basic search algorithms 2 Example: Romania On holiday in Romania; currently in
CS 8520: Artificial Intelligence
 CS 8520: Artificial Intelligence Solving Problems by Searching Paula Matuszek Spring, 2013 Slides based on Hwee Tou Ng, aima.eecs.berkeley.edu/slides-ppt, which are in turn based on Russell, aima.eecs.berkeley.edu/slides-pdf.
CS 8520: Artificial Intelligence Solving Problems by Searching Paula Matuszek Spring, 2013 Slides based on Hwee Tou Ng, aima.eecs.berkeley.edu/slides-ppt, which are in turn based on Russell, aima.eecs.berkeley.edu/slides-pdf.
Lecture 3. Uninformed Search
 Lecture 3 Uninformed Search 1 Uninformed search strategies Uninformed: While searching you have no clue whether one non-goal state is better than any other. Your search is blind. You don t know if your
Lecture 3 Uninformed Search 1 Uninformed search strategies Uninformed: While searching you have no clue whether one non-goal state is better than any other. Your search is blind. You don t know if your
Solving problems by searching
 Solving problems by searching Chapter 3 Some slide credits to Hwee Tou Ng (Singapore) Outline Problem-solving agents Problem types Problem formulation Example problems Basic search algorithms Heuristics
Solving problems by searching Chapter 3 Some slide credits to Hwee Tou Ng (Singapore) Outline Problem-solving agents Problem types Problem formulation Example problems Basic search algorithms Heuristics
AI: problem solving and search
 : problem solving and search Stefano De Luca Slides mainly by Tom Lenaerts Outline Problem-solving agents A kind of goal-based agent Problem types Single state (fully observable) Search with partial information
: problem solving and search Stefano De Luca Slides mainly by Tom Lenaerts Outline Problem-solving agents A kind of goal-based agent Problem types Single state (fully observable) Search with partial information
Solving problems by searching
 Solving problems by searching 1 C H A P T E R 3 Problem-solving agents Problem types Problem formulation Example problems Basic search algorithms Outline 2 Problem-solving agents 3 Note: this is offline
Solving problems by searching 1 C H A P T E R 3 Problem-solving agents Problem types Problem formulation Example problems Basic search algorithms Outline 2 Problem-solving agents 3 Note: this is offline
Search Algorithms. Uninformed Blind search. Informed Heuristic search. Important concepts:
 Uninformed Search Search Algorithms Uninformed Blind search Breadth-first uniform first depth-first Iterative deepening depth-first Bidirectional Branch and Bound Informed Heuristic search Greedy search,
Uninformed Search Search Algorithms Uninformed Blind search Breadth-first uniform first depth-first Iterative deepening depth-first Bidirectional Branch and Bound Informed Heuristic search Greedy search,
Uninformed Search Methods
 Uninformed Search Methods Search Algorithms Uninformed Blind search Breadth-first uniform first depth-first Iterative deepening depth-first Bidirectional Branch and Bound Informed Heuristic search Greedy
Uninformed Search Methods Search Algorithms Uninformed Blind search Breadth-first uniform first depth-first Iterative deepening depth-first Bidirectional Branch and Bound Informed Heuristic search Greedy
CS 771 Artificial Intelligence. Problem Solving by Searching Uninformed search
 CS 771 Artificial Intelligence Problem Solving by Searching Uninformed search Complete architectures for intelligence? Search? Solve the problem of what to do. Learning? Learn what to do. Logic and inference?
CS 771 Artificial Intelligence Problem Solving by Searching Uninformed search Complete architectures for intelligence? Search? Solve the problem of what to do. Learning? Learn what to do. Logic and inference?
Uninformed Search. Problem-solving agents. Tree search algorithms. Single-State Problems
 Uninformed Search Problem-solving agents Tree search algorithms Single-State Problems Breadth-First Search Depth-First Search Limited-Depth Search Iterative Deepening Extensions Graph search algorithms
Uninformed Search Problem-solving agents Tree search algorithms Single-State Problems Breadth-First Search Depth-First Search Limited-Depth Search Iterative Deepening Extensions Graph search algorithms
Chapter 3. A problem-solving agent is a kind of goal-based agent. It decide what to do by finding sequences of actions that lead to desirable states.
 Chapter 3 A problem-solving agent is a kind of goal-based agent. It decide what to do by finding sequences of actions that lead to desirable states. A problem can be defined by four components : 1. The
Chapter 3 A problem-solving agent is a kind of goal-based agent. It decide what to do by finding sequences of actions that lead to desirable states. A problem can be defined by four components : 1. The
Solving Problems by Searching
 Solving Problems by Searching Berlin Chen 2004 Reference: 1. S. Russell and P. Norvig. Artificial Intelligence: A Modern Approach. Chapter 3 1 Introduction Problem-Solving Agents vs. Reflex Agents Problem-solving
Solving Problems by Searching Berlin Chen 2004 Reference: 1. S. Russell and P. Norvig. Artificial Intelligence: A Modern Approach. Chapter 3 1 Introduction Problem-Solving Agents vs. Reflex Agents Problem-solving
Problem solving and search
 Problem solving and search Chapter 3 Chapter 3 1 Problem formulation & examples Basic search algorithms Outline Chapter 3 2 On holiday in Romania; currently in Arad. Flight leaves tomorrow from Bucharest
Problem solving and search Chapter 3 Chapter 3 1 Problem formulation & examples Basic search algorithms Outline Chapter 3 2 On holiday in Romania; currently in Arad. Flight leaves tomorrow from Bucharest
Problem Solving and Search
 Artificial Intelligence Problem Solving and Search Dae-Won Kim School of Computer Science & Engineering Chung-Ang University Outline Problem-solving agents Problem types Problem formulation Example problems
Artificial Intelligence Problem Solving and Search Dae-Won Kim School of Computer Science & Engineering Chung-Ang University Outline Problem-solving agents Problem types Problem formulation Example problems
Solving Problems: Blind Search
 Solving Problems: Blind Search Instructor: B. John Oommen Chancellor s Professor Fellow: IEEE ; Fellow: IAPR School of Computer Science, Carleton University, Canada The primary source of these notes are
Solving Problems: Blind Search Instructor: B. John Oommen Chancellor s Professor Fellow: IEEE ; Fellow: IAPR School of Computer Science, Carleton University, Canada The primary source of these notes are
Artificial Intelligence Problem Solving and Uninformed Search
 Artificial Intelligence Problem Solving and Uninformed Search Maurizio Martelli, Viviana Mascardi {martelli, mascardi}@disi.unige.it University of Genoa Department of Computer and Information Science AI,
Artificial Intelligence Problem Solving and Uninformed Search Maurizio Martelli, Viviana Mascardi {martelli, mascardi}@disi.unige.it University of Genoa Department of Computer and Information Science AI,
Problem solving and search
 Problem solving and search Chapter 3 Chapter 3 1 How to Solve a (Simple) Problem 7 2 4 1 2 5 6 3 4 5 8 3 1 6 7 8 Start State Goal State Chapter 3 2 Introduction Simple goal-based agents can solve problems
Problem solving and search Chapter 3 Chapter 3 1 How to Solve a (Simple) Problem 7 2 4 1 2 5 6 3 4 5 8 3 1 6 7 8 Start State Goal State Chapter 3 2 Introduction Simple goal-based agents can solve problems
Chapter 3 Solving problems by searching
 1 Chapter 3 Solving problems by searching CS 461 Artificial Intelligence Pinar Duygulu Bilkent University, Slides are mostly adapted from AIMA and MIT Open Courseware 2 Introduction Simple-reflex agents
1 Chapter 3 Solving problems by searching CS 461 Artificial Intelligence Pinar Duygulu Bilkent University, Slides are mostly adapted from AIMA and MIT Open Courseware 2 Introduction Simple-reflex agents
Problem solving and search
 Problem solving and search Chapter 3 Chapter 3 1 Outline Problem-solving agents Problem types Problem formulation Example problems Uninformed search algorithms Informed search algorithms Chapter 3 2 Restricted
Problem solving and search Chapter 3 Chapter 3 1 Outline Problem-solving agents Problem types Problem formulation Example problems Uninformed search algorithms Informed search algorithms Chapter 3 2 Restricted
Multiagent Systems Problem Solving and Uninformed Search
 Multiagent Systems Problem Solving and Uninformed Search Viviana Mascardi viviana.mascardi@unige.it MAS, University of Genoa, DIBRIS Classical AI 1 / 36 Disclaimer This presentation may contain material
Multiagent Systems Problem Solving and Uninformed Search Viviana Mascardi viviana.mascardi@unige.it MAS, University of Genoa, DIBRIS Classical AI 1 / 36 Disclaimer This presentation may contain material
Artificial Intelligence
 Artificial Intelligence CSC348 Unit 3: Problem Solving and Search Syedur Rahman Lecturer, CSE Department North South University syedur.rahman@wolfson.oxon.org Artificial Intelligence: Lecture Notes The
Artificial Intelligence CSC348 Unit 3: Problem Solving and Search Syedur Rahman Lecturer, CSE Department North South University syedur.rahman@wolfson.oxon.org Artificial Intelligence: Lecture Notes The
Solving problems by searching
 Solving problems by searching Chapter 3 CS 2710 1 Outline Problem-solving agents Problem formulation Example problems Basic search algorithms CS 2710 - Blind Search 2 1 Goal-based Agents Agents that take
Solving problems by searching Chapter 3 CS 2710 1 Outline Problem-solving agents Problem formulation Example problems Basic search algorithms CS 2710 - Blind Search 2 1 Goal-based Agents Agents that take
Solving Problems by Searching (Blindly)
") Solving Problems by Searching (Blindly) R&N: Chap. 3 (many of these slides borrowed from Stanford s AI Class) Problem Solving Agents Decide what to do by finding a sequence of actions that lead to desirable
Solving Problems by Searching (Blindly) R&N: Chap. 3 (many of these slides borrowed from Stanford s AI Class) Problem Solving Agents Decide what to do by finding a sequence of actions that lead to desirable
ARTIFICIAL INTELLIGENCE (CSC9YE ) LECTURES 2 AND 3: PROBLEM SOLVING
 LECTURES 2 AND 3: PROBLEM SOLVING") ARTIFICIAL INTELLIGENCE (CSC9YE ) LECTURES 2 AND 3: PROBLEM SOLVING BY SEARCH Gabriela Ochoa http://www.cs.stir.ac.uk/~goc/ OUTLINE Problem solving by searching Problem formulation Example problems Search
ARTIFICIAL INTELLIGENCE (CSC9YE ) LECTURES 2 AND 3: PROBLEM SOLVING BY SEARCH Gabriela Ochoa http://www.cs.stir.ac.uk/~goc/ OUTLINE Problem solving by searching Problem formulation Example problems Search
CAP 4630 Artificial Intelligence
 CAP 4630 Artificial Intelligence Instructor: Sam Ganzfried sganzfri@cis.fiu.edu 1 http://www.ultimateaiclass.com/ https://moodle.cis.fiu.edu/ 2 Solving problems by search 3 8-puzzle 4 8-queens 5 Search
CAP 4630 Artificial Intelligence Instructor: Sam Ganzfried sganzfri@cis.fiu.edu 1 http://www.ultimateaiclass.com/ https://moodle.cis.fiu.edu/ 2 Solving problems by search 3 8-puzzle 4 8-queens 5 Search
Goal-Based Agents Problem solving as search. Outline
 Goal-Based Agents Problem solving as search Vasant Honavar Bioinformatics and Computational Biology Program Center for Computational Intelligence, Learning, & Discovery honavar@cs.iastate.edu www.cs.iastate.edu/~honavar/
Goal-Based Agents Problem solving as search Vasant Honavar Bioinformatics and Computational Biology Program Center for Computational Intelligence, Learning, & Discovery honavar@cs.iastate.edu www.cs.iastate.edu/~honavar/
Chapter3. Problem-Solving Agents. Problem Solving Agents (cont.) Well-defined Problems and Solutions. Example Problems.
 Well-defined Problems and Solutions. Example Problems.") Problem-Solving Agents Chapter3 Solving Problems by Searching Reflex agents cannot work well in those environments - state/action mapping too large - take too long to learn Problem-solving agent - is one
Problem-Solving Agents Chapter3 Solving Problems by Searching Reflex agents cannot work well in those environments - state/action mapping too large - take too long to learn Problem-solving agent - is one
Week 3: Path Search. COMP9414/ 9814/ 3411: Artificial Intelligence. Motivation. Example: Romania. Romania Street Map. Russell & Norvig, Chapter 3.
 COMP9414/9814/3411 17s1 Search 1 COMP9414/ 9814/ 3411: Artificial Intelligence Week 3: Path Search Russell & Norvig, Chapter 3. Motivation Reactive and Model-Based Agents choose their actions based only
COMP9414/9814/3411 17s1 Search 1 COMP9414/ 9814/ 3411: Artificial Intelligence Week 3: Path Search Russell & Norvig, Chapter 3. Motivation Reactive and Model-Based Agents choose their actions based only
Artificial Intelligence
 Artificial Intelligence Search Marc Toussaint University of Stuttgart Winter 2015/16 (slides based on Stuart Russell s AI course) Outline Problem formulation & examples Basic search algorithms 2/100 Example:
Artificial Intelligence Search Marc Toussaint University of Stuttgart Winter 2015/16 (slides based on Stuart Russell s AI course) Outline Problem formulation & examples Basic search algorithms 2/100 Example:
Ar#ficial)Intelligence!!
Intelligence!!") Introduc*on! Ar#ficial)Intelligence!! Roman Barták Department of Theoretical Computer Science and Mathematical Logic Problem Solving: Uninformed Search Simple reflex agent only transfers the current percept
Introduc*on! Ar#ficial)Intelligence!! Roman Barták Department of Theoretical Computer Science and Mathematical Logic Problem Solving: Uninformed Search Simple reflex agent only transfers the current percept
ARTIFICIAL INTELLIGENCE SOLVING PROBLEMS BY SEARCHING. Chapter 3
 ARTIFICIAL INTELLIGENCE SOLVING PROBLEMS BY SEARCHING Chapter 3 1 PROBLEM SOLVING We want: To automatically solve a problem We need: A representation of the problem Algorithms that use some strategy to
ARTIFICIAL INTELLIGENCE SOLVING PROBLEMS BY SEARCHING Chapter 3 1 PROBLEM SOLVING We want: To automatically solve a problem We need: A representation of the problem Algorithms that use some strategy to
Search EECS 395/495 Intro to Artificial Intelligence
 Search EECS 395/495 Intro to Artificial Intelligence Doug Downey (slides from Oren Etzioni, based on Stuart Russell, Dan Weld, Henry Kautz, and others) What is Search? Search is a class of techniques for
Search EECS 395/495 Intro to Artificial Intelligence Doug Downey (slides from Oren Etzioni, based on Stuart Russell, Dan Weld, Henry Kautz, and others) What is Search? Search is a class of techniques for
Search EECS 348 Intro to Artificial Intelligence
 Search EECS 348 Intro to Artificial Intelligence (slides from Oren Etzioni, based on Stuart Russell, Dan Weld, Henry Kautz, and others) What is Search? Search is a class of techniques for systematically
Search EECS 348 Intro to Artificial Intelligence (slides from Oren Etzioni, based on Stuart Russell, Dan Weld, Henry Kautz, and others) What is Search? Search is a class of techniques for systematically
4. Solving Problems by Searching
 COMP9414/9814/3411 15s1 Search 1 COMP9414/ 9814/ 3411: Artificial Intelligence 4. Solving Problems by Searching Russell & Norvig, Chapter 3. Motivation Reactive and Model-Based Agents choose their actions
COMP9414/9814/3411 15s1 Search 1 COMP9414/ 9814/ 3411: Artificial Intelligence 4. Solving Problems by Searching Russell & Norvig, Chapter 3. Motivation Reactive and Model-Based Agents choose their actions
ITCS 6150 Intelligent Systems. Lecture 3 Uninformed Searches
 ITCS 6150 Intelligent Systems Lecture 3 Uninformed Searches Outline Problem Solving Agents Restricted form of general agent Problem Types Fully vs. partially observable, deterministic vs. stochastic Problem
ITCS 6150 Intelligent Systems Lecture 3 Uninformed Searches Outline Problem Solving Agents Restricted form of general agent Problem Types Fully vs. partially observable, deterministic vs. stochastic Problem
Artificial Intelligence Uninformed search
 Artificial Intelligence Uninformed search A.I. Uninformed search 1 The symbols&search hypothesis for AI Problem-solving agents A kind of goal-based agent Problem types Single state (fully observable) Search
Artificial Intelligence Uninformed search A.I. Uninformed search 1 The symbols&search hypothesis for AI Problem-solving agents A kind of goal-based agent Problem types Single state (fully observable) Search
Uninformed Search. Chapter 3
 Uninformed Search Chapter 3 (Based on slides by Stuart Russell, Subbarao Kambhampati, Dan Weld, Oren Etzioni, Henry Kautz, Richard Korf, and other UW-AI faculty) Agent s Knowledge Representation Type State
Uninformed Search Chapter 3 (Based on slides by Stuart Russell, Subbarao Kambhampati, Dan Weld, Oren Etzioni, Henry Kautz, Richard Korf, and other UW-AI faculty) Agent s Knowledge Representation Type State
CMU-Q Lecture 2: Search problems Uninformed search. Teacher: Gianni A. Di Caro
 CMU-Q 15-381 Lecture 2: Search problems Uninformed search Teacher: Gianni A. Di Caro RECAP: ACT RATIONALLY Think like people Think rationally Agent Sensors? Actuators Percepts Actions Environment Act like
CMU-Q 15-381 Lecture 2: Search problems Uninformed search Teacher: Gianni A. Di Caro RECAP: ACT RATIONALLY Think like people Think rationally Agent Sensors? Actuators Percepts Actions Environment Act like
Problem Solving as Search. CMPSCI 383 September 15, 2011
 Problem Solving as Search CMPSCI 383 September 15, 2011 1 Today s lecture Problem-solving as search Uninformed search methods Problem abstraction Bold Claim: Many problems faced by intelligent agents,
Problem Solving as Search CMPSCI 383 September 15, 2011 1 Today s lecture Problem-solving as search Uninformed search methods Problem abstraction Bold Claim: Many problems faced by intelligent agents,
Pengju XJTU 2016
 Introduction to AI Chapter03 Solving Problems by Uninformed Searching(3.1~3.4) Pengju Ren@IAIR Outline Problem-solving agents Problem types Problem formulation Search on Trees and Graphs Uninformed algorithms
Introduction to AI Chapter03 Solving Problems by Uninformed Searching(3.1~3.4) Pengju Ren@IAIR Outline Problem-solving agents Problem types Problem formulation Search on Trees and Graphs Uninformed algorithms
Problem Solving by Searching
 Problem Solving by Searching R&N: 3.1-3.3 Michael Rovatsos University of Edinburgh 20 th January 2015 Outline Problem-solving agents Problem types Problem formulation Example problems Basic search algorithms
Problem Solving by Searching R&N: 3.1-3.3 Michael Rovatsos University of Edinburgh 20 th January 2015 Outline Problem-solving agents Problem types Problem formulation Example problems Basic search algorithms
Problem solving and search
 Problem solving and search hapter 3 hapter 3 1 Outline Problem-solving agents Problem types Problem formulation Example problems asic search algorithms hapter 3 3 Restricted form of general agent: Problem-solving
Problem solving and search hapter 3 hapter 3 1 Outline Problem-solving agents Problem types Problem formulation Example problems asic search algorithms hapter 3 3 Restricted form of general agent: Problem-solving
CS 4700: Foundations of Artificial Intelligence. Bart Selman. Search Techniques R&N: Chapter 3
 CS 4700: Foundations of Artificial Intelligence Bart Selman Search Techniques R&N: Chapter 3 Outline Search: tree search and graph search Uninformed search: very briefly (covered before in other prerequisite
CS 4700: Foundations of Artificial Intelligence Bart Selman Search Techniques R&N: Chapter 3 Outline Search: tree search and graph search Uninformed search: very briefly (covered before in other prerequisite
Uninformed Search Strategies AIMA
 Uninformed Search Strategies AIMA 3.3-3.4 CIS 421/521 - Intro to AI - Fall 2017 1 Review: Formulating search problems Formulate search problem States: configurations of the puzzle (9! configurations) Actions:
Uninformed Search Strategies AIMA 3.3-3.4 CIS 421/521 - Intro to AI - Fall 2017 1 Review: Formulating search problems Formulate search problem States: configurations of the puzzle (9! configurations) Actions:
Problem solving and search
 Problem solving and search Chapter 3 TB Artificial Intelligence Slides from AIMA http://aima.cs.berkeley.edu 1 /1 Outline Problem-solving agents Problem types Problem formulation Example problems Basic
Problem solving and search Chapter 3 TB Artificial Intelligence Slides from AIMA http://aima.cs.berkeley.edu 1 /1 Outline Problem-solving agents Problem types Problem formulation Example problems Basic
Solving problems by searching
 Solving problems by searching CE417: Introduction to Artificial Intelligence Sharif University of Technology Spring 2014 Soleymani Artificial Intelligence: A Modern Approach, Chapter 3 Outline Problem-solving
Solving problems by searching CE417: Introduction to Artificial Intelligence Sharif University of Technology Spring 2014 Soleymani Artificial Intelligence: A Modern Approach, Chapter 3 Outline Problem-solving
KI-Programmierung. Basic Search Algorithms
 KI-Programmierung Basic Search Algorithms Bernhard Beckert UNIVERSITÄT KOBLENZ-LANDAU Winter Term 2007/2008 B. Beckert: KI-Programmierung p.1 Example: Travelling in Romania Scenario On holiday in Romania;
KI-Programmierung Basic Search Algorithms Bernhard Beckert UNIVERSITÄT KOBLENZ-LANDAU Winter Term 2007/2008 B. Beckert: KI-Programmierung p.1 Example: Travelling in Romania Scenario On holiday in Romania;
AGENTS AND ENVIRONMENTS. What is AI in reality?
 AGENTS AND ENVIRONMENTS What is AI in reality? AI is our attempt to create a machine that thinks (or acts) humanly (or rationally) Think like a human Cognitive Modeling Think rationally Logic-based Systems
AGENTS AND ENVIRONMENTS What is AI in reality? AI is our attempt to create a machine that thinks (or acts) humanly (or rationally) Think like a human Cognitive Modeling Think rationally Logic-based Systems
Chapter 3: Solving Problems by Searching
 Chapter 3: Solving Problems by Searching Prepared by: Dr. Ziad Kobti 1 Problem-Solving Agent Reflex agent -> base its actions on a direct mapping from states to actions. Cannot operate well in large environments
Chapter 3: Solving Problems by Searching Prepared by: Dr. Ziad Kobti 1 Problem-Solving Agent Reflex agent -> base its actions on a direct mapping from states to actions. Cannot operate well in large environments
Solving problems by searching
 Solving problems by searching CE417: Introduction to Artificial Intelligence Sharif University of Technology Spring 2017 Soleymani Artificial Intelligence: A Modern Approach, Chapter 3 Outline Problem-solving
Solving problems by searching CE417: Introduction to Artificial Intelligence Sharif University of Technology Spring 2017 Soleymani Artificial Intelligence: A Modern Approach, Chapter 3 Outline Problem-solving
Robot Programming with Lisp
 6. Search Algorithms Gayane Kazhoyan (Stuart Russell, Peter Norvig) Institute for University of Bremen Contents Problem Definition Uninformed search strategies BFS Uniform-Cost DFS Depth-Limited Iterative
6. Search Algorithms Gayane Kazhoyan (Stuart Russell, Peter Norvig) Institute for University of Bremen Contents Problem Definition Uninformed search strategies BFS Uniform-Cost DFS Depth-Limited Iterative
Pengju
 Introduction to AI Chapter03 Solving Problems by Uninformed Searching(3.1~3.4) Pengju Ren@IAIR Outline Problem-solving agents Problem types Problem formulation Search on Trees and Graphs Uninformed algorithms
Introduction to AI Chapter03 Solving Problems by Uninformed Searching(3.1~3.4) Pengju Ren@IAIR Outline Problem-solving agents Problem types Problem formulation Search on Trees and Graphs Uninformed algorithms
ARTIFICIAL INTELLIGENCE. Pathfinding and search
 INFOB2KI 2017-2018 Utrecht University The Netherlands ARTIFICIAL INTELLIGENCE Pathfinding and search Lecturer: Silja Renooij These slides are part of the INFOB2KI Course Notes available from www.cs.uu.nl/docs/vakken/b2ki/schema.html
INFOB2KI 2017-2018 Utrecht University The Netherlands ARTIFICIAL INTELLIGENCE Pathfinding and search Lecturer: Silja Renooij These slides are part of the INFOB2KI Course Notes available from www.cs.uu.nl/docs/vakken/b2ki/schema.html
Solving Problems by Searching. AIMA Sections , 3.6
 AIMA Sections 3.1 3.3, 3.6 Outline Problem-solving agents Problem types Problem formulation Example problems General search algorithm Problem-solving agents function Simple-Problem--Agent( percept) returns
AIMA Sections 3.1 3.3, 3.6 Outline Problem-solving agents Problem types Problem formulation Example problems General search algorithm Problem-solving agents function Simple-Problem--Agent( percept) returns
Solving Problems by Searching
 Solving Problems by Searching Agents, Goal-Based Agents, Problem-Solving Agents Search Problems Blind Search Strategies Agents sensors environment percepts actions? agent effectors Definition. An agent
Solving Problems by Searching Agents, Goal-Based Agents, Problem-Solving Agents Search Problems Blind Search Strategies Agents sensors environment percepts actions? agent effectors Definition. An agent
Solving Problems by Searching
 Solving Problems by Searching Agents, Goal-Based Agents, Problem-Solving Agents Search Problems Blind Search Strategies Agents sensors environment percepts actions? agent effectors Definition. An agent
Solving Problems by Searching Agents, Goal-Based Agents, Problem-Solving Agents Search Problems Blind Search Strategies Agents sensors environment percepts actions? agent effectors Definition. An agent
AGENTS AND ENVIRONMENTS. What is AI in reality?
 AGENTS AND ENVIRONMENTS What is AI in reality? AI is our attempt to create a machine that thinks (or acts) humanly (or rationally) Think like a human Cognitive Modeling Think rationally Logic-based Systems
AGENTS AND ENVIRONMENTS What is AI in reality? AI is our attempt to create a machine that thinks (or acts) humanly (or rationally) Think like a human Cognitive Modeling Think rationally Logic-based Systems
Solving Problems by Searching
 Solving Problems by Searching CS486/686 University of Waterloo Sept 11, 2008 1 Outline Problem solving agents and search Examples Properties of search algorithms Uninformed search Breadth first Depth first
Solving Problems by Searching CS486/686 University of Waterloo Sept 11, 2008 1 Outline Problem solving agents and search Examples Properties of search algorithms Uninformed search Breadth first Depth first
Artificial Intelligence, CS, Nanjing University Spring, 2018, Yang Yu. Lecture 2: Search 1.
 rtificial Intelligence, S, Nanjing University Spring, 2018, Yang Yu Lecture 2: Search 1 http://lamda.nju.edu.cn/yuy/course_ai18.ashx Problem in the lecture 7 2 4 51 2 3 5 6 4 5 6 8 3 1 7 8 Start State
rtificial Intelligence, S, Nanjing University Spring, 2018, Yang Yu Lecture 2: Search 1 http://lamda.nju.edu.cn/yuy/course_ai18.ashx Problem in the lecture 7 2 4 51 2 3 5 6 4 5 6 8 3 1 7 8 Start State
Solving Problems by Searching
 INF5390 Kunstig intelligens Solving Problems by Searching Roar Fjellheim Outline Problem-solving agents Example problems Search programs Uninformed search Informed search Summary AIMA Chapter 3: Solving
INF5390 Kunstig intelligens Solving Problems by Searching Roar Fjellheim Outline Problem-solving agents Example problems Search programs Uninformed search Informed search Summary AIMA Chapter 3: Solving
Uninformed Search. Chapter 3. (Based on slides by Stuart Russell, Subbarao Kambhampati, Dan Weld, Oren Etzioni, Henry Kautz, and other UW-AI faculty)
") Uninformed Search Chapter 3 (Based on slides by Stuart Russell, Subbarao Kambhampati, Dan Weld, Oren Etzioni, Henry Kautz, and other UW-AI faculty) Agent s Knowledge Representation Type State representation
Uninformed Search Chapter 3 (Based on slides by Stuart Russell, Subbarao Kambhampati, Dan Weld, Oren Etzioni, Henry Kautz, and other UW-AI faculty) Agent s Knowledge Representation Type State representation
Problem solving and search: Chapter 3, Sections 1 5
 Problem solving and search: hapter 3, Sections 1 5 1 Outline Problem-solving agents Problem types Problem formulation Example problems asic search algorithms 2 Problem-solving agents estricted form of
Problem solving and search: hapter 3, Sections 1 5 1 Outline Problem-solving agents Problem types Problem formulation Example problems asic search algorithms 2 Problem-solving agents estricted form of
Problem solving and search: Chapter 3, Sections 1 5
 Problem solving and search: hapter 3, Sections 1 5 S 480 2 Outline Problem-solving agents Problem types Problem formulation Example problems asic search algorithms Problem-solving agents estricted form
Problem solving and search: hapter 3, Sections 1 5 S 480 2 Outline Problem-solving agents Problem types Problem formulation Example problems asic search algorithms Problem-solving agents estricted form
Problem Solving. Russell and Norvig: Chapter 3
 Problem Solving Russell and Norvig: Chapter 3 Example: Route finding Example: 8-puzzle 8 2 3 4 7 6 5 6 Initial state 7 8 Goal state Example: 8-puzzle 8 2 7 8 2 3 4 5 6 3 4 7 5 6 8 2 8 2 3 4 7 3 4 7 5 6
Problem Solving Russell and Norvig: Chapter 3 Example: Route finding Example: 8-puzzle 8 2 3 4 7 6 5 6 Initial state 7 8 Goal state Example: 8-puzzle 8 2 7 8 2 3 4 5 6 3 4 7 5 6 8 2 8 2 3 4 7 3 4 7 5 6
Basic Search. Fall Xin Yao. Artificial Intelligence: Basic Search
 Basic Search Xin Yao Fall 2017 Fall 2017 Artificial Intelligence: Basic Search Xin Yao Outline Motivating Examples Problem Formulation From Searching to Search Tree Uninformed Search Methods Breadth-first
Basic Search Xin Yao Fall 2017 Fall 2017 Artificial Intelligence: Basic Search Xin Yao Outline Motivating Examples Problem Formulation From Searching to Search Tree Uninformed Search Methods Breadth-first
Solving Problems by Searching
 INF5390 Kunstig intelligens Sony Vaio VPC-Z12 Solving Problems by Searching Roar Fjellheim Outline Problem-solving agents Example problems Search programs Uninformed search Informed search Summary AIMA
INF5390 Kunstig intelligens Sony Vaio VPC-Z12 Solving Problems by Searching Roar Fjellheim Outline Problem-solving agents Example problems Search programs Uninformed search Informed search Summary AIMA
Class Overview. Introduction to Artificial Intelligence COMP 3501 / COMP Lecture 2: Search. Problem Solving Agents
 Class Overview COMP 3501 / COMP 4704-4 Lecture 2: Search Prof. 1 2 Problem Solving Agents Problem Solving Agents: Assumptions Requires a goal Assume world is: Requires actions Observable What actions?
Class Overview COMP 3501 / COMP 4704-4 Lecture 2: Search Prof. 1 2 Problem Solving Agents Problem Solving Agents: Assumptions Requires a goal Assume world is: Requires actions Observable What actions?
Vorlesung Grundlagen der Künstlichen Intelligenz
 Vorlesung Grundlagen der Künstlichen Intelligenz Reinhard Lafrenz / Prof. A. Knoll Robotics and Embedded Systems Department of Informatics I6 Technische Universität München www6.in.tum.de lafrenz@in.tum.de
Vorlesung Grundlagen der Künstlichen Intelligenz Reinhard Lafrenz / Prof. A. Knoll Robotics and Embedded Systems Department of Informatics I6 Technische Universität München www6.in.tum.de lafrenz@in.tum.de
HW#1 due today. HW#2 due Monday, 9/09/13, in class Continue reading Chapter 3
 9-04-2013 Uninformed (blind) search algorithms Breadth-First Search (BFS) Uniform-Cost Search Depth-First Search (DFS) Depth-Limited Search Iterative Deepening Best-First Search HW#1 due today HW#2 due
9-04-2013 Uninformed (blind) search algorithms Breadth-First Search (BFS) Uniform-Cost Search Depth-First Search (DFS) Depth-Limited Search Iterative Deepening Best-First Search HW#1 due today HW#2 due
521495A: Artificial Intelligence
 521495A: Artificial Intelligence Search Lectured by Abdenour Hadid Associate Professor, CMVS, University of Oulu Slides adopted from http://ai.berkeley.edu Agent An agent is an entity that perceives the
521495A: Artificial Intelligence Search Lectured by Abdenour Hadid Associate Professor, CMVS, University of Oulu Slides adopted from http://ai.berkeley.edu Agent An agent is an entity that perceives the
Lecture 4: Search 3. Victor R. Lesser. CMPSCI 683 Fall 2010
 Lecture 4: Search 3 Victor R. Lesser CMPSCI 683 Fall 2010 First Homework 1 st Programming Assignment 2 separate parts (homeworks) First part due on (9/27) at 5pm Second part due on 10/13 at 5pm Send homework
Lecture 4: Search 3 Victor R. Lesser CMPSCI 683 Fall 2010 First Homework 1 st Programming Assignment 2 separate parts (homeworks) First part due on (9/27) at 5pm Second part due on 10/13 at 5pm Send homework
CS 151: Intelligent Agents, Problem Formulation and Search
 CS 151: Intelligent Agents, Problem Formulation and Search How do we make a computer "smart?" Computer, clean the house! Um OK?? This one's got no chance How do we represent this problem? Hmmm where to
CS 151: Intelligent Agents, Problem Formulation and Search How do we make a computer "smart?" Computer, clean the house! Um OK?? This one's got no chance How do we represent this problem? Hmmm where to
CS486/686 Lecture Slides (c) 2015 P.Poupart
 2015 P.Poupart") 1 2 Solving Problems by Searching [RN2] Sec 3.1-3.5 [RN3] Sec 3.1-3.4 CS486/686 University of Waterloo Lecture 2: May 7, 2015 3 Outline Problem solving agents and search Examples Properties of search algorithms
1 2 Solving Problems by Searching [RN2] Sec 3.1-3.5 [RN3] Sec 3.1-3.4 CS486/686 University of Waterloo Lecture 2: May 7, 2015 3 Outline Problem solving agents and search Examples Properties of search algorithms
Blind (Uninformed) Search (Where we systematically explore alternatives)
 Search (Where we systematically explore alternatives)") Blind (Uninformed) Search (Where we systematically explore alternatives) R&N: Chap. 3, Sect. 3.3 5 Slides from Jean-Claude Latombe at Stanford University (used with permission) Simple Problem-Solving-Agent
Blind (Uninformed) Search (Where we systematically explore alternatives) R&N: Chap. 3, Sect. 3.3 5 Slides from Jean-Claude Latombe at Stanford University (used with permission) Simple Problem-Solving-Agent
CS486/686 Lecture Slides (c) 2014 P.Poupart
 2014 P.Poupart") 1 2 1 Solving Problems by Searching [RN2] Sec 3.1-3.5 [RN3] Sec 3.1-3.4 CS486/686 University of Waterloo Lecture 2: January 9, 2014 3 Outline Problem solving agents and search Examples Properties of search
1 2 1 Solving Problems by Searching [RN2] Sec 3.1-3.5 [RN3] Sec 3.1-3.4 CS486/686 University of Waterloo Lecture 2: January 9, 2014 3 Outline Problem solving agents and search Examples Properties of search
Uninformed Search (Ch )
") Uninformed Search (Ch. 3-3.4) Announcements First homework will be posted tonight (due next Wednesday at 11:55 pm) Review We use words that have a general English definition in a technical sense nd Rational=choose
Uninformed Search (Ch. 3-3.4) Announcements First homework will be posted tonight (due next Wednesday at 11:55 pm) Review We use words that have a general English definition in a technical sense nd Rational=choose
A4B36ZUI - Introduction ARTIFICIAL INTELLIGENCE
 A4B36ZUI - Introduction to ARTIFICIAL INTELLIGENCE https://cw.fel.cvut.cz/wiki/courses/a4b33zui/start Michal Pechoucek, Branislav Bosansky, Jiri Klema & Olga Stepankova Department of Computer Science Czech
A4B36ZUI - Introduction to ARTIFICIAL INTELLIGENCE https://cw.fel.cvut.cz/wiki/courses/a4b33zui/start Michal Pechoucek, Branislav Bosansky, Jiri Klema & Olga Stepankova Department of Computer Science Czech
Graph Search. Chris Amato Northeastern University. Some images and slides are used from: Rob Platt, CS188 UC Berkeley, AIMA
 Graph Search Chris Amato Northeastern University Some images and slides are used from: Rob Platt, CS188 UC Berkeley, AIMA What is graph search? Start state Goal state Graph search: find a path from start
Graph Search Chris Amato Northeastern University Some images and slides are used from: Rob Platt, CS188 UC Berkeley, AIMA What is graph search? Start state Goal state Graph search: find a path from start
Planning and search. Lecture 1: Introduction and Revision of Search. Lecture 1: Introduction and Revision of Search 1
 Planning and search Lecture 1: Introduction and Revision of Search Lecture 1: Introduction and Revision of Search 1 Lecturer: Natasha lechina email: nza@cs.nott.ac.uk ontact and web page web page: http://www.cs.nott.ac.uk/
Planning and search Lecture 1: Introduction and Revision of Search Lecture 1: Introduction and Revision of Search 1 Lecturer: Natasha lechina email: nza@cs.nott.ac.uk ontact and web page web page: http://www.cs.nott.ac.uk/
A2 Uninformed Search
 2 Uninformed Search Hantao Zhang http://www.cs.uiowa.edu/ hzhang/c145 The University of Iowa Department of omputer Science rtificial Intelligence p.1/82 Example: The 8-puzzle 2 8 3 1 7 6 4 5 It can be
2 Uninformed Search Hantao Zhang http://www.cs.uiowa.edu/ hzhang/c145 The University of Iowa Department of omputer Science rtificial Intelligence p.1/82 Example: The 8-puzzle 2 8 3 1 7 6 4 5 It can be
Example: The 8-puzzle. A2 Uninformed Search. It can be generalized to 15-puzzle, 24-puzzle, or. (n 2 1)-puzzle for n 6. Department of Computer Science
-puzzle for n 6. Department of Computer Science") 2 Uninformed Search Hantao Zhang http://www.cs.uiowa.edu/ hzhang/c145 The University of Iowa Department of omputer Science rtificial Intelligence p.1/82 Example: The 8-puzzle 2 1 7 8 3 6 4 5 It can be
2 Uninformed Search Hantao Zhang http://www.cs.uiowa.edu/ hzhang/c145 The University of Iowa Department of omputer Science rtificial Intelligence p.1/82 Example: The 8-puzzle 2 1 7 8 3 6 4 5 It can be
S A E RC R H C I H NG N G IN N S T S A T T A E E G R G A R PH P S
 LECTURE 2 SEARCHING IN STATE GRAPHS Introduction Idea: Problem Solving as Search Basic formalism as State-Space Graph Graph explored by Tree Search Different algorithms to explore the graph Slides mainly
LECTURE 2 SEARCHING IN STATE GRAPHS Introduction Idea: Problem Solving as Search Basic formalism as State-Space Graph Graph explored by Tree Search Different algorithms to explore the graph Slides mainly
DIT411/TIN175, Artificial Intelligence. Peter Ljunglöf. 19 January, 2018
 DIT411/TIN175, Artificial Intelligence Chapter 3: Classical search algorithms CHAPTER 3: CLASSICAL SEARCH ALGORITHMS DIT411/TIN175, Artificial Intelligence Peter Ljunglöf 19 January, 2018 1 DEADLINE FOR
DIT411/TIN175, Artificial Intelligence Chapter 3: Classical search algorithms CHAPTER 3: CLASSICAL SEARCH ALGORITHMS DIT411/TIN175, Artificial Intelligence Peter Ljunglöf 19 January, 2018 1 DEADLINE FOR
Blind (Uninformed) Search (Where we systematically explore alternatives)
 Search (Where we systematically explore alternatives)") Blind (Uninformed) Search (Where we systematically explore alternatives) R&N: Chap. 3, Sect. 3.3 5 1 Simple Problem-Solving-Agent Agent Algorithm 1. s 0 sense/read initial state 2. GOAL? select/read goal
Blind (Uninformed) Search (Where we systematically explore alternatives) R&N: Chap. 3, Sect. 3.3 5 1 Simple Problem-Solving-Agent Agent Algorithm 1. s 0 sense/read initial state 2. GOAL? select/read goal
3 SOLVING PROBLEMS BY SEARCHING
 48 3 SOLVING PROBLEMS BY SEARCHING A goal-based agent aims at solving problems by performing actions that lead to desirable states Let us first consider the uninformed situation in which the agent is not
48 3 SOLVING PROBLEMS BY SEARCHING A goal-based agent aims at solving problems by performing actions that lead to desirable states Let us first consider the uninformed situation in which the agent is not
DFS. Depth-limited Search
 DFS Completeness? No, fails in infinite depth spaces or spaces with loops Yes, assuming state space finite. Time complexity? O(b m ), terrible if m is much bigger than d. can do well if lots of goals Space
DFS Completeness? No, fails in infinite depth spaces or spaces with loops Yes, assuming state space finite. Time complexity? O(b m ), terrible if m is much bigger than d. can do well if lots of goals Space
Artificial Intelligence: Search Part 1: Uninformed graph search
 rtificial Intelligence: Search Part 1: Uninformed graph search Thomas Trappenberg January 8, 2009 ased on the slides provided by Russell and Norvig, hapter 3 Search outline Part 1: Uninformed search (tree
rtificial Intelligence: Search Part 1: Uninformed graph search Thomas Trappenberg January 8, 2009 ased on the slides provided by Russell and Norvig, hapter 3 Search outline Part 1: Uninformed search (tree
Uninformed Search. CS171, Winter 2018 Introduction to Artificial Intelligence Prof. Richard Lathrop. Reading: R&N
 Uninformed Search CS171, Winter 2018 Introduction to Artificial Intelligence Prof. Richard Lathrop Reading: R&N 3.1-3.4 Uninformed search strategies Uninformed (blind): You have no clue whether one non-goal
Uninformed Search CS171, Winter 2018 Introduction to Artificial Intelligence Prof. Richard Lathrop Reading: R&N 3.1-3.4 Uninformed search strategies Uninformed (blind): You have no clue whether one non-goal
CS:4420 Artificial Intelligence
 S:4420 rtificial Intelligence Spring 2018 Uninformed Search esare Tinelli The University of Iowa opyright 2004 18, esare Tinelli and Stuart Russell a a These notes were originally developed by Stuart Russell
S:4420 rtificial Intelligence Spring 2018 Uninformed Search esare Tinelli The University of Iowa opyright 2004 18, esare Tinelli and Stuart Russell a a These notes were originally developed by Stuart Russell
Problem solving by search
 Problem solving by search based on tuart ussel s slides (http://aima.cs.berkeley.edu) February 27, 2017, E533KUI - Problem solving by search 1 Outline Problem-solving agents Problem types Problem formulation
Problem solving by search based on tuart ussel s slides (http://aima.cs.berkeley.edu) February 27, 2017, E533KUI - Problem solving by search 1 Outline Problem-solving agents Problem types Problem formulation
Princess Nora University Faculty of Computer & Information Systems ARTIFICIAL INTELLIGENCE (CS 370D) Computer Science Department
 Computer Science Department") Princess Nora University Faculty of Computer & Information Systems 1 ARTIFICIAL INTELLIGENCE (CS 370D) Computer Science Department (CHAPTER-3-PART1) PROBLEM SOLVING AND SEARCH (Course coordinator) WHY
Princess Nora University Faculty of Computer & Information Systems 1 ARTIFICIAL INTELLIGENCE (CS 370D) Computer Science Department (CHAPTER-3-PART1) PROBLEM SOLVING AND SEARCH (Course coordinator) WHY
Class Overview. Introduction to Artificial Intelligence COMP 3501 / COMP Lecture 2. Problem Solving Agents. Problem Solving Agents: Assumptions
 Class Overview COMP 3501 / COMP 4704-4 Lecture 2 Prof. JGH 318 Problem Solving Agents Problem Solving Agents: Assumptions Requires a goal Assume world is: Requires actions Observable What actions? Discrete
Class Overview COMP 3501 / COMP 4704-4 Lecture 2 Prof. JGH 318 Problem Solving Agents Problem Solving Agents: Assumptions Requires a goal Assume world is: Requires actions Observable What actions? Discrete
Uninformed Search. Reading: Chapter 4 (Tuesday, 2/5) HW#1 due next Tuesday
 HW#1 due next Tuesday") Uninformed Search Reading: Chapter 4 (Tuesday, 2/5) HW#1 due next Tuesday 1 Uninformed Search through the space of possible solutions Use no knowledge about which path is likely to be best Exception: uniform
Uninformed Search Reading: Chapter 4 (Tuesday, 2/5) HW#1 due next Tuesday 1 Uninformed Search through the space of possible solutions Use no knowledge about which path is likely to be best Exception: uniform