Zero Robotics Autonomous Space Capture Challenge Manual
|
|
|
- Howard York
- 5 years ago
- Views:
Transcription
1 Zero Robotics Autonomous Space Capture Challenge Manual v1.3 1 Introduction 1.1 Conventions Vectors All vectors in this document are denoted with a bold face font. Of special note is the position vector x = [ x y z not to be confused with the state vector X (see blow). Zero Robotics Attitude A reduced attitude representation is available to simplify the process of attitude control. The Zero Robotics attitude species a pointing direction ˆn ZR = [ n x n y n z for the Velcro (-x) face of the satellite. The API function ZRSetAttitudeTarget() orients the satellite to point its Velcro face in the selected direction 1. No control is provided for the vehicle's rotation about the pointing direction. More advanced users may prefer to use quaternions for attitude control (see next section). Quaternion Attitude (Advanced) Internally, SPHERES uses a quaternion to represent rotations. The quaternion represents a transformation from the global coordinate frame to the body frame of the satellite by rotating through an angle θ about a unit vector axis ˆn = [ n x n y n z. A quaternion is represented as a vector of length four, with the following properties q = [ sin θ 2 ˆn cos θ 2 q = 1 In our convention q = [ q 1 q 2 q 3 q 4 with the scalar part, cos θ 2, as the fourth term. Please note that the ZR attitude representation species the pointing direction for the -x face of the satellite, so an identity (no rotation) quaternion q = [ corresponds to a ZR attitude of ˆnZR = [ Simple cases of the challenge should be possible with either attitude representation, but using quaternions will allow more advanced motion than the ZR attitude. The ZR API provides the function ZRSetQuatTarget() to specify a quaternion attitude target, and several math functions are available for performing calculations with them. See the ZR API documentation for details. State Vectors Two types of state vectors are available to determine the satellite's full state (position, velocity, orientation, and attitude rates). A 13-element SPHERES state X SP HERES = [ x ẋ q ω may be retrieved with the API function ZRGetMySphState() and uses a quaternion attitude. Alternatively, the Zero Robotics state X ZR = [ x ẋ ˆn ω 1 Note that calling ZRSetAttitudeTarget() will point the satellite in a specied direction, not at a specied location. 1


2 Figure 1: Capture Zone Positioning may be retrieved with the API function ZRGetMyZRState() and uses the ZR attitude. A SPHERES state can be converted to ZR state with the function ZRSpheresToZR(). 2 Challenge Statement 2.1 Objective The Autonomous Space Capture Challenge consists of synchronizing rotational and translational motion with a tumbling space object, thereby setting up the conditions to capture it. The challenge specically focuses on producing a control algorithm that minimizes the propellant cost to capture the object. Competitors will also identify the most challenging docking conditions by specifying several parameters of the space object's motion (see Section 2.3). To complete the challenge, the Tender must: 1. Maneuver to a Capture Zone located 25 ± 1 cm along the -x axis in the 7 Approach Cone of the space object (see Figure 1). Section 3 provides calculations for determining if the Tender is in the capture zone 2. Align for capture by orienting the -x axis of your satellite within ±2.5 of the space object's -x axis (see Figure 2) 3. Stay within the capture zone for 5 seconds with a relative velocity of less than 5 mm/s while avoiding the following constraints: 1. The Tender must maintain a 30 cm collision avoidance distance from the center of the space object except when in the approach cone (see Figure 3). The approach cone ends at the boundary of the capture zone at 24 cm from the object. 2. Docking must occur while the centers of both the Tender and the space object are within the Object Capture Area. The boundaries are shown in Figure 4. It is important to note that the absolute position of the tender within the test volume will have a high uncertainty. See section The Tender must complete the challenge without running out of a virtual tank of propellant. Each time the Tender res a thruster, a counter records the total time it is open. An allocation of 30 thruster-seconds is allowed for completing the challenge. The total propellant remaining in thruster-seconds is available through the API function ACGetFuelRemaining() and is displayed in the visualization. 4. The Tender must complete the capture maneuver within a time period of 210 seconds. For initial testing it is possible to disable the capture constraints by setting the ZR game variable DisableConstraints to 1 in the simulation settings dialog. 2





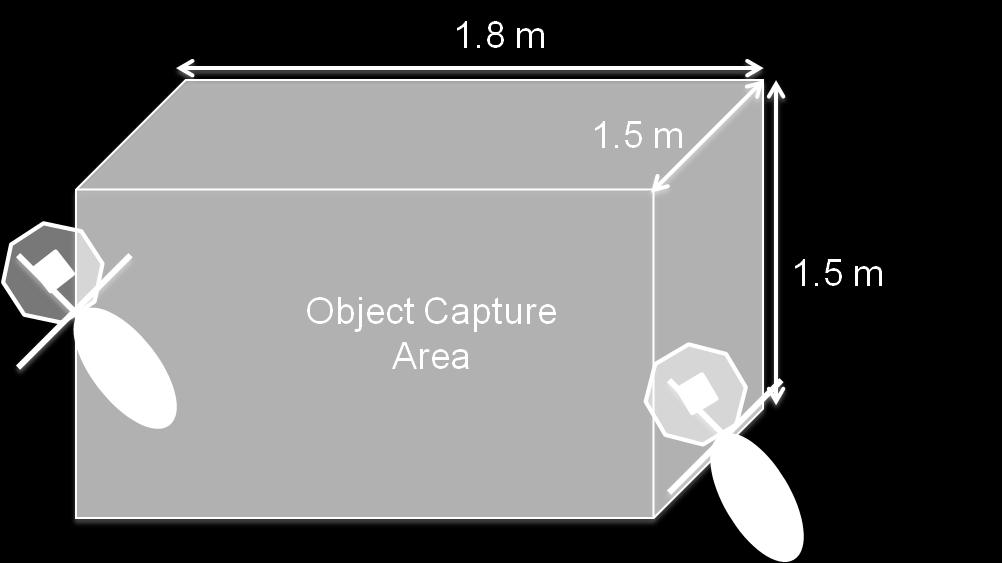
3 Figure 2: Capture Zone Alignment Figure 3: Collision Avoidance Region and Avoidance Cone Figure 4: Capture Area 3
4 2.2 Tender Initial Conditions Both satellite competitors will be initialized in the same virtual location in the test volume. The initial position will be on the y axis: x 0 = [ The initial orientation starts with the docking port facing the space object side of the volume with the Velcro face of the Tender along the Y axis. This corresponds to a ZR attitude of and a quaternion attitude of n 0 = [ q 0 = [ The Tender will have no initial velocity or rotation rate with respect to the global coordinate frame. 2.3 Space Object Parameters A key part of the challenge will be selecting a set of parameters that initialize the state of the space object and aect its motion. Table 1 describes the congurable parameters. The initial position for the object is specied in only the (x, z) plane, and the y position is constant: y 0 = 0.6m To initialize the parameters, the API function ACSetObjectParams() must be called in ZRInit() with an Object- Params data structure. Also, note the limits placed on the parameters. The limits are intended to keep the motion within the thrust capabilities of the SPHERES satellites, though some combinations of parameters may result in impossible scenarios. If any user-supplied parameters exceed the specied limits or the parameters are not specied, the Tender's controls will be disabled, and the submission will be scored as if it did not complete the challenge. The initial attitude of the space object is specied as a quaternion. If you prefer to use the ZR attitude to specify the orientation, use the API fucntion ZRAttVec2Quat() to create a quaternion from the ZR attitude vector. (Updated ) The initial rotation axis direction specied by ω 0 will be perturbed randomly by up to 8 degrees. For testing purposes the perturbation can be disabled by setting the game variable DisableSpinAxisNoise to Relative State Information In contrast to previous Zero Robotics competitions, the state information provided for the space object will be expressed in a coordinate frame centered on the tender's position. This relative state information models the information that would be available to a tender spacecraft when capturing a space object at close proximity using a LIDAR or camera-based sensor. To further emphasize the importance of using relative state information, the position states provided by the ZRGetMySphState() and ZRGetMyZRState() API functions will be intentionally distorted with additional random noise. The position information will be sucient to avoid the walls of the volume, but the information should not be used for capturing the object. Since the objective of the challenge is to develop an independent control system to dock to the target, the API functions ZRGetOther*State() will not return a state for the other player. 2.5 Scoring Scoring Calculation During the scoring process, submissions run in head-to-head matches against the top performing projects on the competition leaderboard. For each pairing, the scoring system runs matches with the players as both SPH1 and SPH2, and both players use the space object parameters specied by SPH1. If SPH1 does not specify parameters, the parameters from SPH2 are used, and SPH1 is not scored. Both competitors are initialized in the same positions 4
5 Parameter Description Limit Units I max I min 18 I x, I y, I z Principal moments of inertia I x + I y I z kg m 2 I y + I z I x I z + I x I y v 0 Initial velocity v m s x 0, z 0 Initial position in the (x, z) plane ±0.75 m q 0 Initial quaternion orientation q = 1 - ω 0 Initial angular velocity ω rad s ω Table 1: Congurable capture object parameters and perform the same capture challenge with the same object parameters simultaneously. The nal score for the match will be the dierence in propellant consumed between the two players. score 1 = propused 2 propused 1 score 2 = propused 1 propused 2 It is important to note that although the two competitors in a match will always be performing the same challenge and have identical satellites, the two satellites may be aected by random perturbations in dierent ways, resulting in small or even large variations in score. This is fully intended as part of the challenge and reects uncertainties in the satellite dynamic and sensing models. The best performing solutions will be those that prove to be robust to these variations and a wide variety of object parameters. Partial Completion If only one competitor completes the challenge in the allotted time without violating constraints, the score for the successful tender (+) is automatically set to the maximum 5 points, and the score for the unsuccessful tender (-) is set to -5. score + = 5 score = 5 As an extra incentive for attempting to complete the challenge, if the unsuccessful tender manages to reach the capture zone for at least one second, and the relative fuel consumption between the satellites is within 1 unit, the unsuccessful tender will receive 0 points instead of -5. score + = as above score = 0 5
6 If neither satellite completes the challenge their scores will both be set to 0. Entering a Submission Scores are calculated whenever a competitor enters a submission. To enter a submission, follow these steps: 1. Click on the team management link for your team under the Resources Team Management page ( robotics/my-teams) 2. From the menu in the left column, select the Submissions button 3. Select the Submit Project or Update Project button and choose a project to be scored 4. After clicking Submit the project will be compiled and checked for code size limitations. If compilation is successful, the project will be queued for scoring. The scoring process may take up to minutes to complete depending on server loads. Attempting to submit another project during the scoring process will result in a notication indicating that the scoring process is still running. If you do not see an option to submit a project, please contact support. The Competition Leaderboard The leaderboard will be visible on the ZRASCC tournament detail page after the rst submissions are made. The leaderboard operates as follows: 1. When a new submission is entered, a batch simulation is started against the top players in the current leaderboard standings. 2. After each match, the scores of both players are updated. This means the top leaderboard positions are constantly defending against challenges from new submissions. 3. Position on the leaderboard is determined by the average score over all the matches the submission has participated in. If a new match is completed between the same players as an old match, the old score is deleted and replaced with the new match results. Match visualization results are available by clicking on a ranked player. 2.6 Test Result Codes When simulations complete in the IDE, they return a single number that indicates the outcome of a test. following numbers indicate the outcomes of a ZRASCC simulation. The Result Code Description 10 Capture Completed Successfully 20 Timeout 30 Constraints Violated 40 Out of Propellant 50 Object Parameters not Specied 6
7 3 Math Reference and API Functions 3.1 Space Object Motion The space object is modeled as a rigid body translating and rotating through space with no external forces or torques. The body angular rates of the object follow the Euler equations for rigid body rotation as shown in Equation 1. ω x = I y I z ω y ω z I x ω y = I z I x ω z ω x I y ω z = I x I y I z ω x ω y (1) The attitude of the object is represented with a quaternion and is propagated according to the following equation q = 1 2 Ωq Ω = 0 ω z ω y ω x ω z 0 ω x ω y ω y ω x 0 ω z ω x ω y ω z 0 (2) The center of the capture zone moves as if rigidly attached to the space object at a distance of 25cm along the body axis as shown in Equation 4. Equation 4 describes the global position of the capture zone given the position of the object, and Equation 5 shows the global velocity of the capture zone taking into account the velocity of the object and its rotational velocity. r cap = [ (3) x cap = x obj + R b2g r cap (4) ẋ cap = ẋ obj + R b2g (ω obj r cap ) (5) The matrix R b2g converts vectors in the body frame of the object into vectors in the global coordinate frame, and the vector ω obj represents the body frame rotation rates. The attitude target for the capture zone is the space object attitude rotated 180 about the body Z axis. The target can be calculated by post-multiplying the object quaternion [ by the rotation quaternion q rot = as shown in Equation 6. The body rotation rates of the capture zone are likewise rotated by 180 to match the orientation of the tender. q cap = q obj q rot (6) ω cap = R rot ω obj (7) Several utility functions are provided to simplify the task of predicting the motion of the satellite and the capture zone. Full specications for the functions are provided in the API documents. ACGetObjectState() Retrieves the SPHERES state of the space object relative to the position of the tender. The (x, y, z) directions are aligned with the global coordinate frame. Attitude is with respect to the the global coordinate frame and rotation rates are with respect to the body frame of the space object. 7
8 ACPredictState() Integrates the equations of motion of the object forward from the supplied initial state ACGetCaptureState() Given a SPHERES state of the space object, determines the full SPHERES state X cap = [ x cap ẋ cap q cap ω cap of the center of the capture zone 3.2 Approach Cone There are two steps to determining if the the Tender is in the capture cone of the space object. 1. Determine which direction the approach cone is pointing in the global frame. The unit vector attitude contained in the ZR state vector provides a quick way of retrieving the direction because it points in the same direction as the cone. ˆn cone = ˆn object 2. Calculate the relative unit vector ˆr between the space object and the Tender using their state vectors. Taking the dot product with the unit vector ˆn cone results in the cosine of the angle between the two vectors. If the angle is within the half-cone angle of 2.4 the the Tender is within the approach cone. r = x tender x object r r ˆn cone cos(2.4 ) in cone The API function ACInCone() performs this check when provided a SPHERES state vector for both the Tender and the space object. 3.3 Capture Zone In addition to the checks in Section 3.2, the capture zone requires the distance to the space object to be within 25±1 cm and the relative velocity within 5 mm/s r 0.26 AND ṙ in capture Additionally, the relative attitude between the two objects must be within 2.5. Using the ZR state vector, calculate the dot product between the attitude vector of the Tender and the attitude of the space object. ˆn cone ˆn tender cos(2.5 ) aligned Note the change of sign now that the axes are anti-aligned. The API function ACInCapture() will perform these checks provided a SPHERES state vector for both the Tender and the space object. There is no requirement on the rotation of the satellite about the pointing direction to allow for use of ZR attitude or quaternion attitude. 4 Problem Add-Ons and Adjustments Several additional problem add-ons have been identied to increase the diculty of the capture challenge by adding more realistic features. At the end of each week, the Zero Robotics team will evaluate the progress of the competitors and may choose to release one or more add-ons for the upcoming week. The changes are intended to promote more advanced solutions and re-invigorate the solution space once the competitors begin to converge on an equilibrium. Problem simplications will also be considered if required. 4.1 Pointing Constraint Many concepts for autonomous capture rely on a LIDAR or camera sensor to track the object during approach. This add-on will require the Tender to be pointed at the space object to retrieve the state from ACGetObjectState(). 8
9 4.2 State Noise (ACTIVE ) The level of noise on the global state of the satellite may be increased to discourage its use for position control or lowered to allow for better maneuvering around the boundary constraints. 4.3 Approach Cone The angle of the approach cone may be decreased to provide more challenging conditions for the nal synchronization. 4.4 Propellant Constraint The propellant allocation may be decreased or increased depending on the performance of the competitors. In general, it is expected that the allocation will only be adjusted if there is a signicant dierence between the default allocation and the amount required for demonstrated capture scenarios. 4.5 Non-Completion Penalty The fuel penalty for not completing the capture may be adjusted to better match the scale of scores in the competition. 4.6 Minimum Object Rotation Rate (ACTIVE ) The rotation rate of the object ω 0 must be at least 0.03 rad/s. This add-on will encourage a more challenging capture scenario. 5 Example Code and Standard Player A basic competitor has been created to demonstrate the use of the API functions. It is available as a standard player to compete against under the username 'zrascc' and example code for the player is available in the API documentation. The player does not avoid the collision or boundary constraints, so consider setting DisableConstraints when testing the player initially. Change Log Version Description Author Date 1.0 Initial Release jgkatz Added clarifying note about disabled ZRGetOther*State() jgkatz Updated scoring description for partial completion. Activated state noise add-on. jgkatz Modied description of leaderboard scoring to reect new double-match system jgkatz Simplied bonus for partial completion and activated new add-on for rotation axis perturbation jgkatz
Mobile Robotics. Mathematics, Models, and Methods. HI Cambridge. Alonzo Kelly. Carnegie Mellon University UNIVERSITY PRESS
 Mobile Robotics Mathematics, Models, and Methods Alonzo Kelly Carnegie Mellon University HI Cambridge UNIVERSITY PRESS Contents Preface page xiii 1 Introduction 1 1.1 Applications of Mobile Robots 2 1.2
Mobile Robotics Mathematics, Models, and Methods Alonzo Kelly Carnegie Mellon University HI Cambridge UNIVERSITY PRESS Contents Preface page xiii 1 Introduction 1 1.1 Applications of Mobile Robots 2 1.2
Force Modeling, Quaternion PID, and Optimization
 Cornell University Autonomous Underwater Vehicle Team Spring 2014 Force Modeling, Quaternion PID, and Optimization Technical Report Alex Spitzer (aes368) May 11, 2014 Contents 1 Abstract 2 2 Previous Designs
Cornell University Autonomous Underwater Vehicle Team Spring 2014 Force Modeling, Quaternion PID, and Optimization Technical Report Alex Spitzer (aes368) May 11, 2014 Contents 1 Abstract 2 2 Previous Designs
Development of a Ground Based Cooperating Spacecraft Testbed for Research and Education
 DIPARTIMENTO DI INGEGNERIA INDUSTRIALE Development of a Ground Based Cooperating Spacecraft Testbed for Research and Education Mattia Mazzucato, Sergio Tronco, Andrea Valmorbida, Fabio Scibona and Enrico
DIPARTIMENTO DI INGEGNERIA INDUSTRIALE Development of a Ground Based Cooperating Spacecraft Testbed for Research and Education Mattia Mazzucato, Sergio Tronco, Andrea Valmorbida, Fabio Scibona and Enrico
Introduction to quaternions. Mathematics. Operations
 Introduction to quaternions Topics: Definition Mathematics Operations Euler Angles (optional) intro to quaternions 1 noel.h.hughes@gmail.com Euler's Theorem y y Angle! rotation follows right hand rule
Introduction to quaternions Topics: Definition Mathematics Operations Euler Angles (optional) intro to quaternions 1 noel.h.hughes@gmail.com Euler's Theorem y y Angle! rotation follows right hand rule
Transformation. Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering
 RBE 550 MOTION PLANNING BASED ON DR. DMITRY BERENSON S RBE 550 Transformation Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Announcement Project
RBE 550 MOTION PLANNING BASED ON DR. DMITRY BERENSON S RBE 550 Transformation Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Announcement Project
Trajectory planning of 2 DOF planar space robot without attitude controller
 ISSN 1 746-7233, England, UK World Journal of Modelling and Simulation Vol. 4 (2008) No. 3, pp. 196-204 Trajectory planning of 2 DOF planar space robot without attitude controller Rajkumar Jain, Pushparaj
ISSN 1 746-7233, England, UK World Journal of Modelling and Simulation Vol. 4 (2008) No. 3, pp. 196-204 Trajectory planning of 2 DOF planar space robot without attitude controller Rajkumar Jain, Pushparaj
Introduction to Robotics
 Université de Strasbourg Introduction to Robotics Bernard BAYLE, 2013 http://eavr.u-strasbg.fr/ bernard Modelling of a SCARA-type robotic manipulator SCARA-type robotic manipulators: introduction SCARA-type
Université de Strasbourg Introduction to Robotics Bernard BAYLE, 2013 http://eavr.u-strasbg.fr/ bernard Modelling of a SCARA-type robotic manipulator SCARA-type robotic manipulators: introduction SCARA-type
CS 445 / 645 Introduction to Computer Graphics. Lecture 21 Representing Rotations
 CS 445 / 645 Introduction to Computer Graphics Lecture 21 Representing Rotations Parameterizing Rotations Straightforward in 2D A scalar, θ, represents rotation in plane More complicated in 3D Three scalars
CS 445 / 645 Introduction to Computer Graphics Lecture 21 Representing Rotations Parameterizing Rotations Straightforward in 2D A scalar, θ, represents rotation in plane More complicated in 3D Three scalars
DYNAMICS OF SPACE ROBOTIC ARM DURING INTERACTIONS WITH NON COOPERATIVE OBJECTS
 DYNAMICS OF SPACE ROBOTIC ARM DURING INTERACTIONS WITH NON COOPERATIVE OBJECTS Karol Seweryn 1, Marek Banaszkiewicz 1, Bernd Maediger 2, Tomasz Rybus 1, Josef Sommer 2 1 Space Research Centre of the Polish
DYNAMICS OF SPACE ROBOTIC ARM DURING INTERACTIONS WITH NON COOPERATIVE OBJECTS Karol Seweryn 1, Marek Banaszkiewicz 1, Bernd Maediger 2, Tomasz Rybus 1, Josef Sommer 2 1 Space Research Centre of the Polish
A simple example. Assume we want to find the change in the rotation angles to get the end effector to G. Effect of changing s
 CENG 732 Computer Animation This week Inverse Kinematics (continued) Rigid Body Simulation Bodies in free fall Bodies in contact Spring 2006-2007 Week 5 Inverse Kinematics Physically Based Rigid Body Simulation
CENG 732 Computer Animation This week Inverse Kinematics (continued) Rigid Body Simulation Bodies in free fall Bodies in contact Spring 2006-2007 Week 5 Inverse Kinematics Physically Based Rigid Body Simulation
a a= a a =a a 1 =1 Division turned out to be equivalent to multiplication: a b= a b =a 1 b
 MATH 245 Extra Effort ( points) My assistant read through my first draft, got half a page in, and skipped to the end. So I will save you the flipping. Here is the assignment. Do just one of them. All the
MATH 245 Extra Effort ( points) My assistant read through my first draft, got half a page in, and skipped to the end. So I will save you the flipping. Here is the assignment. Do just one of them. All the
Performance Study of Quaternion and Matrix Based Orientation for Camera Calibration
 Performance Study of Quaternion and Matrix Based Orientation for Camera Calibration Rigoberto Juarez-Salazar 1, Carlos Robledo-Sánchez 2, Fermín Guerrero-Sánchez 2, J. Jacobo Oliveros-Oliveros 2, C. Meneses-Fabian
Performance Study of Quaternion and Matrix Based Orientation for Camera Calibration Rigoberto Juarez-Salazar 1, Carlos Robledo-Sánchez 2, Fermín Guerrero-Sánchez 2, J. Jacobo Oliveros-Oliveros 2, C. Meneses-Fabian
OPTIMAL DESPIN OF A TUMBLING SATELLITE WITH AN ARBITRARY THRUSTER CONFIGURATION, INERTIA MATRIX, AND COST FUNCTIONAL
 AAS 10-141 OPTIMAL DESPIN OF A TUMBLING SATELLITE WITH AN ARBITRARY THRUSTER CONFIGURATION, INERTIA MATRIX, AND COST FUNCTIONAL Daniel Sheinfeld * and Stephen Rock INTRODUCTION An algorithm to calculate
AAS 10-141 OPTIMAL DESPIN OF A TUMBLING SATELLITE WITH AN ARBITRARY THRUSTER CONFIGURATION, INERTIA MATRIX, AND COST FUNCTIONAL Daniel Sheinfeld * and Stephen Rock INTRODUCTION An algorithm to calculate
3D Transformations. CS 4620 Lecture 10. Cornell CS4620 Fall 2014 Lecture Steve Marschner (with previous instructors James/Bala)
") 3D Transformations CS 4620 Lecture 10 1 Translation 2 Scaling 3 Rotation about z axis 4 Rotation about x axis 5 Rotation about y axis 6 Properties of Matrices Translations: linear part is the identity
3D Transformations CS 4620 Lecture 10 1 Translation 2 Scaling 3 Rotation about z axis 4 Rotation about x axis 5 Rotation about y axis 6 Properties of Matrices Translations: linear part is the identity
A Constrained Attitude Control Module for Small Satellites
 A Constrained Attitude Control Module for Small Satellites Henri Kjellberg and E. Glenn Lightsey The University of Texas at Austin Small Satellite Conference Logan, Utah August 14, 2012 Motivation for
A Constrained Attitude Control Module for Small Satellites Henri Kjellberg and E. Glenn Lightsey The University of Texas at Austin Small Satellite Conference Logan, Utah August 14, 2012 Motivation for
3D Transformations. CS 4620 Lecture Kavita Bala w/ prior instructor Steve Marschner. Cornell CS4620 Fall 2015 Lecture 11
 3D Transformations CS 4620 Lecture 11 1 Announcements A2 due tomorrow Demos on Monday Please sign up for a slot Post on piazza 2 Translation 3 Scaling 4 Rotation about z axis 5 Rotation about x axis 6
3D Transformations CS 4620 Lecture 11 1 Announcements A2 due tomorrow Demos on Monday Please sign up for a slot Post on piazza 2 Translation 3 Scaling 4 Rotation about z axis 5 Rotation about x axis 6
Virtual Environments
 ELG 524 Virtual Environments Jean-Christian Delannoy viewing in 3D world coordinates / geometric modeling culling lighting virtualized reality collision detection collision response interactive forces
ELG 524 Virtual Environments Jean-Christian Delannoy viewing in 3D world coordinates / geometric modeling culling lighting virtualized reality collision detection collision response interactive forces
Elective in Robotics. Quadrotor Modeling (Marilena Vendittelli)
") Elective in Robotics Quadrotor Modeling (Marilena Vendittelli) Introduction Modeling Control Problems Models for control Main control approaches Elective in Robotics - Quadrotor Modeling (M. Vendittelli)
Elective in Robotics Quadrotor Modeling (Marilena Vendittelli) Introduction Modeling Control Problems Models for control Main control approaches Elective in Robotics - Quadrotor Modeling (M. Vendittelli)
Rotation parameters for model building and stable parameter inversion in orthorhombic media Cintia Lapilli* and Paul J. Fowler, WesternGeco.
 otation parameters for model building and stable parameter inversion in orthorhombic media Cintia Lapilli* and Paul J Fowler, WesternGeco Summary Symmetry groups commonly used to describe seismic anisotropy
otation parameters for model building and stable parameter inversion in orthorhombic media Cintia Lapilli* and Paul J Fowler, WesternGeco Summary Symmetry groups commonly used to describe seismic anisotropy
ME 597: AUTONOMOUS MOBILE ROBOTICS SECTION 2 COORDINATE TRANSFORMS. Prof. Steven Waslander
 ME 597: AUTONOMOUS MOILE ROOTICS SECTION 2 COORDINATE TRANSFORMS Prof. Steven Waslander OUTLINE Coordinate Frames and Transforms Rotation Matrices Euler Angles Quaternions Homogeneous Transforms 2 COORDINATE
ME 597: AUTONOMOUS MOILE ROOTICS SECTION 2 COORDINATE TRANSFORMS Prof. Steven Waslander OUTLINE Coordinate Frames and Transforms Rotation Matrices Euler Angles Quaternions Homogeneous Transforms 2 COORDINATE
MTRX4700 Experimental Robotics
 MTRX 4700 : Experimental Robotics Lecture 2 Stefan B. Williams Slide 1 Course Outline Week Date Content Labs Due Dates 1 5 Mar Introduction, history & philosophy of robotics 2 12 Mar Robot kinematics &
MTRX 4700 : Experimental Robotics Lecture 2 Stefan B. Williams Slide 1 Course Outline Week Date Content Labs Due Dates 1 5 Mar Introduction, history & philosophy of robotics 2 12 Mar Robot kinematics &
Data Association for SLAM
 CALIFORNIA INSTITUTE OF TECHNOLOGY ME/CS 132a, Winter 2011 Lab #2 Due: Mar 10th, 2011 Part I Data Association for SLAM 1 Introduction For this part, you will experiment with a simulation of an EKF SLAM
CALIFORNIA INSTITUTE OF TECHNOLOGY ME/CS 132a, Winter 2011 Lab #2 Due: Mar 10th, 2011 Part I Data Association for SLAM 1 Introduction For this part, you will experiment with a simulation of an EKF SLAM
Advanced Robotic Manipulation
 Advanced Robotic Manipulation Handout CS327A (Spring 2017) Problem Set #1 Due Wed, Apr 19 th Guidelines: This homework has both problem-solving and programming components. So please start early. In problems
Advanced Robotic Manipulation Handout CS327A (Spring 2017) Problem Set #1 Due Wed, Apr 19 th Guidelines: This homework has both problem-solving and programming components. So please start early. In problems
ME/CS 133(a): Final Exam (Fall Quarter 2017/2018)
: Final Exam (Fall Quarter 2017/2018)") ME/CS 133(a): Final Exam (Fall Quarter 2017/2018) Instructions 1. Limit your total time to 5 hours. You can take a break in the middle of the exam if you need to ask a question, or go to dinner, etc. That
ME/CS 133(a): Final Exam (Fall Quarter 2017/2018) Instructions 1. Limit your total time to 5 hours. You can take a break in the middle of the exam if you need to ask a question, or go to dinner, etc. That
Federal Aviation. Administration. November 10, COE CST First Annual Technical Meeting (ATM1) November 9 & 10, 2011.
 November 9 & 10, 2011.") COE CST First Annual Technical Meeting: Autonomous Rendezvous and Docking for Space Degree Mitigation: Fast Trajectory Generation Emmanuel Collins Florida State University Administration November 10, 2011
COE CST First Annual Technical Meeting: Autonomous Rendezvous and Docking for Space Degree Mitigation: Fast Trajectory Generation Emmanuel Collins Florida State University Administration November 10, 2011
Autonomous Mobile Robot Design
 Autonomous Mobile Robot Design Topic: EKF-based SLAM Dr. Kostas Alexis (CSE) These slides have partially relied on the course of C. Stachniss, Robot Mapping - WS 2013/14 Autonomous Robot Challenges Where
Autonomous Mobile Robot Design Topic: EKF-based SLAM Dr. Kostas Alexis (CSE) These slides have partially relied on the course of C. Stachniss, Robot Mapping - WS 2013/14 Autonomous Robot Challenges Where
Tracking Multiple Objects in 3D. Coimbra 3030 Coimbra target projection in the same image position (usually
 Tracking Multiple Objects in 3D Jo~ao P. Barreto Paulo Peioto Coimbra 33 Coimbra 33 Jorge Batista Helder Araujo Coimbra 33 Coimbra 33 Abstract In this paper a system for tracking multiple targets in 3D
Tracking Multiple Objects in 3D Jo~ao P. Barreto Paulo Peioto Coimbra 33 Coimbra 33 Jorge Batista Helder Araujo Coimbra 33 Coimbra 33 Abstract In this paper a system for tracking multiple targets in 3D
Analysis of Euler Angles in a Simple Two-Axis Gimbals Set
 Vol:5, No:9, 2 Analysis of Euler Angles in a Simple Two-Axis Gimbals Set Ma Myint Myint Aye International Science Index, Mechanical and Mechatronics Engineering Vol:5, No:9, 2 waset.org/publication/358
Vol:5, No:9, 2 Analysis of Euler Angles in a Simple Two-Axis Gimbals Set Ma Myint Myint Aye International Science Index, Mechanical and Mechatronics Engineering Vol:5, No:9, 2 waset.org/publication/358
Animation. Keyframe animation. CS4620/5620: Lecture 30. Rigid motion: the simplest deformation. Controlling shape for animation
 Keyframe animation CS4620/5620: Lecture 30 Animation Keyframing is the technique used for pose-to-pose animation User creates key poses just enough to indicate what the motion is supposed to be Interpolate
Keyframe animation CS4620/5620: Lecture 30 Animation Keyframing is the technique used for pose-to-pose animation User creates key poses just enough to indicate what the motion is supposed to be Interpolate
An Automatic Method for Adjustment of a Camera Calibration Room
 An Automatic Method for Adjustment of a Camera Calibration Room Presented at the FIG Working Week 2017, May 29 - June 2, 2017 in Helsinki, Finland Theory, algorithms, implementation, and two advanced applications.
An Automatic Method for Adjustment of a Camera Calibration Room Presented at the FIG Working Week 2017, May 29 - June 2, 2017 in Helsinki, Finland Theory, algorithms, implementation, and two advanced applications.
Gyroscopic Stabilization of Unstable Dynamical Systems
 Gyroscopic Stabilization of Unstable Dynamical Systems Peter Jorgensen Under the direction of Donghoon Kim and Dr. John E. Hurtado Land, Air, and Space Robotics Laboratory Texas A&M University, College
Gyroscopic Stabilization of Unstable Dynamical Systems Peter Jorgensen Under the direction of Donghoon Kim and Dr. John E. Hurtado Land, Air, and Space Robotics Laboratory Texas A&M University, College
Quaternions & Rotation in 3D Space
 Quaternions & Rotation in 3D Space 1 Overview Quaternions: definition Quaternion properties Quaternions and rotation matrices Quaternion-rotation matrices relationship Spherical linear interpolation Concluding
Quaternions & Rotation in 3D Space 1 Overview Quaternions: definition Quaternion properties Quaternions and rotation matrices Quaternion-rotation matrices relationship Spherical linear interpolation Concluding
ME5286 Robotics Spring 2014 Quiz 1 Solution. Total Points: 30
 Page 1 of 7 ME5286 Robotics Spring 2014 Quiz 1 Solution Total Points: 30 (Note images from original quiz are not included to save paper/ space. Please see the original quiz for additional information and
Page 1 of 7 ME5286 Robotics Spring 2014 Quiz 1 Solution Total Points: 30 (Note images from original quiz are not included to save paper/ space. Please see the original quiz for additional information and
Turning an Automated System into an Autonomous system using Model-Based Design Autonomous Tech Conference 2018
 Turning an Automated System into an Autonomous system using Model-Based Design Autonomous Tech Conference 2018 Asaf Moses Systematics Ltd., Technical Product Manager aviasafm@systematics.co.il 1 Autonomous
Turning an Automated System into an Autonomous system using Model-Based Design Autonomous Tech Conference 2018 Asaf Moses Systematics Ltd., Technical Product Manager aviasafm@systematics.co.il 1 Autonomous
Selection and Integration of Sensors Alex Spitzer 11/23/14
 Selection and Integration of Sensors Alex Spitzer aes368@cornell.edu 11/23/14 Sensors Perception of the outside world Cameras, DVL, Sonar, Pressure Accelerometers, Gyroscopes, Magnetometers Position vs
Selection and Integration of Sensors Alex Spitzer aes368@cornell.edu 11/23/14 Sensors Perception of the outside world Cameras, DVL, Sonar, Pressure Accelerometers, Gyroscopes, Magnetometers Position vs
A Stochastic Environment Modeling Method for Mobile Robot by using 2-D Laser scanner Young D. Kwon,Jin.S Lee Department of Electrical Engineering, Poh
 A Stochastic Environment Modeling Method for Mobile Robot by using -D Laser scanner Young D. Kwon,Jin.S Lee Department of Electrical Engineering, Pohang University of Science and Technology, e-mail: jsoo@vision.postech.ac.kr
A Stochastic Environment Modeling Method for Mobile Robot by using -D Laser scanner Young D. Kwon,Jin.S Lee Department of Electrical Engineering, Pohang University of Science and Technology, e-mail: jsoo@vision.postech.ac.kr
Bearing only visual servo control of a non-holonomic mobile robot. Robert Mahony
 Bearing only visual servo control of a non-holonomic mobile robot. Robert Mahony Department of Engineering, Australian National University, Australia. email: Robert.Mahony@anu.edu.au url: http://engnet.anu.edu.au/depeople/robert.mahony/
Bearing only visual servo control of a non-holonomic mobile robot. Robert Mahony Department of Engineering, Australian National University, Australia. email: Robert.Mahony@anu.edu.au url: http://engnet.anu.edu.au/depeople/robert.mahony/
Adaptive Control of a CameraProjection System using VisionBased Feedback
 Adaptive Control of a CameraProjection System using VisionBased Feedback Chwen Kai Liao Thesis submitted to the Faculty of the Virginia Polytechnic Institute and State University in partial fulllment of
Adaptive Control of a CameraProjection System using VisionBased Feedback Chwen Kai Liao Thesis submitted to the Faculty of the Virginia Polytechnic Institute and State University in partial fulllment of
Satellite Attitude Determination
 Satellite Attitude Determination AERO4701 Space Engineering 3 Week 5 Last Week Looked at GPS signals and pseudorange error terms Looked at GPS positioning from pseudorange data Looked at GPS error sources,
Satellite Attitude Determination AERO4701 Space Engineering 3 Week 5 Last Week Looked at GPS signals and pseudorange error terms Looked at GPS positioning from pseudorange data Looked at GPS error sources,
Optimization of a two-link Robotic Manipulator
 Optimization of a two-link Robotic Manipulator Zachary Renwick, Yalım Yıldırım April 22, 2016 Abstract Although robots are used in many processes in research and industry, they are generally not customized
Optimization of a two-link Robotic Manipulator Zachary Renwick, Yalım Yıldırım April 22, 2016 Abstract Although robots are used in many processes in research and industry, they are generally not customized
APPLICATIONS AND CHALLENGES FOR UNDERWATER SWIMMING MANIPULATORS
 APPLICATIONS AND CHALLENGES FOR UNDERWATER SWIMMING MANIPULATORS Jørgen Sverdrup-Thygeson AMOS Days October 2017 Introduction NEEDS FOR SUBSEA INSPECTION, MAINTENANCE AND REPAIR The number of new subsea
APPLICATIONS AND CHALLENGES FOR UNDERWATER SWIMMING MANIPULATORS Jørgen Sverdrup-Thygeson AMOS Days October 2017 Introduction NEEDS FOR SUBSEA INSPECTION, MAINTENANCE AND REPAIR The number of new subsea
Lab 10 is TRobots competition Use Version 1.85 (make sure it is 2012 version) All in C, Metrowerks Project
 All in C, Metrowerks Project") Lab 10 is TRobots competition Use Version 1.85 (make sure it is 2012 version) All in C, Metrowerks Project Set up TRobot -Download Trobots1_85.zip and unzip Give it a simple path: D:\Trobots1_85 -Trobot.exe
Lab 10 is TRobots competition Use Version 1.85 (make sure it is 2012 version) All in C, Metrowerks Project Set up TRobot -Download Trobots1_85.zip and unzip Give it a simple path: D:\Trobots1_85 -Trobot.exe
Quaternion to Euler Angle Conversion for Arbitrary Rotation Sequence Using Geometric Methods
 uaternion to Euler Angle Conversion for Arbitrary Rotation Sequence Using Geometric Methods ê = normalized Euler ation axis i Noel H. Hughes Nomenclature = indices of first, second and third Euler
uaternion to Euler Angle Conversion for Arbitrary Rotation Sequence Using Geometric Methods ê = normalized Euler ation axis i Noel H. Hughes Nomenclature = indices of first, second and third Euler
Development of Formation Flight and Docking Algorithms Using the SPHERES Testbed
 Development of Formation Flight and Docking Algorithms Using the Testbed Prof. David W. Miller MIT Allen Chen, Alvar Saenz-Otero, Mark Hilstad, David W. Miller Introduction : Synchronized Position Hold
Development of Formation Flight and Docking Algorithms Using the Testbed Prof. David W. Miller MIT Allen Chen, Alvar Saenz-Otero, Mark Hilstad, David W. Miller Introduction : Synchronized Position Hold
Generic UDP Software Interface Manual. For all CKAS 6DOF Motion Systems
 Generic UDP Software Interface Manual For all CKAS 6DOF Motion Systems Published by CKAS Mechatronics, Melb, VIC Australia info@ckas.com.au Page 1 info@ckas.com.au 1 Table of Contents 1 Table of Contents...2
Generic UDP Software Interface Manual For all CKAS 6DOF Motion Systems Published by CKAS Mechatronics, Melb, VIC Australia info@ckas.com.au Page 1 info@ckas.com.au 1 Table of Contents 1 Table of Contents...2
New York State Regents Examination in Geometry (Common Core) Performance Level Descriptions
 Performance Level Descriptions") New York State Regents Examination in Geometry (Common Core) Performance Level Descriptions August 2015 THE STATE EDUCATION DEPARTMENT / THE UNIVERSITY OF THE STATE OF NEW YORK / ALBANY, NY 12234 Geometry
New York State Regents Examination in Geometry (Common Core) Performance Level Descriptions August 2015 THE STATE EDUCATION DEPARTMENT / THE UNIVERSITY OF THE STATE OF NEW YORK / ALBANY, NY 12234 Geometry
Robotics (Kinematics) Winter 1393 Bonab University
 Winter 1393 Bonab University") Robotics () Winter 1393 Bonab University : most basic study of how mechanical systems behave Introduction Need to understand the mechanical behavior for: Design Control Both: Manipulators, Mobile Robots
Robotics () Winter 1393 Bonab University : most basic study of how mechanical systems behave Introduction Need to understand the mechanical behavior for: Design Control Both: Manipulators, Mobile Robots
PROJECT 3 SPACE FLIGHT SIMULATION
 PROJECT 3 SPACE FLIGHT SIMULATION FIRST, SOME APOLOGIES Only runs on Windows (DirectX) Bugs 201-566-6610 jas512@lehigh.edu KNOWN ISSUES Don t deploy landing gear (g) on Observer plane. Causes a snapping
PROJECT 3 SPACE FLIGHT SIMULATION FIRST, SOME APOLOGIES Only runs on Windows (DirectX) Bugs 201-566-6610 jas512@lehigh.edu KNOWN ISSUES Don t deploy landing gear (g) on Observer plane. Causes a snapping
Lesson 1: Introduction to Pro/MECHANICA Motion
 Lesson 1: Introduction to Pro/MECHANICA Motion 1.1 Overview of the Lesson The purpose of this lesson is to provide you with a brief overview of Pro/MECHANICA Motion, also called Motion in this book. Motion
Lesson 1: Introduction to Pro/MECHANICA Motion 1.1 Overview of the Lesson The purpose of this lesson is to provide you with a brief overview of Pro/MECHANICA Motion, also called Motion in this book. Motion
A Quantitative Stability Measure for Graspless Manipulation
 A Quantitative Stability Measure for Graspless Manipulation Yusuke MAEDA and Tamio ARAI Department of Precision Engineering, School of Engineering The University of Tokyo 7-3-1 Hongo, Bunkyo-ku, Tokyo
A Quantitative Stability Measure for Graspless Manipulation Yusuke MAEDA and Tamio ARAI Department of Precision Engineering, School of Engineering The University of Tokyo 7-3-1 Hongo, Bunkyo-ku, Tokyo
PSE Game Physics. Session (3) Springs, Ropes, Linear Momentum and Rotations. Oliver Meister, Roland Wittmann
 Springs, Ropes, Linear Momentum and Rotations. Oliver Meister, Roland Wittmann") PSE Game Physics Session (3) Springs, Ropes, Linear Momentum and Rotations Oliver Meister, Roland Wittmann 08.05.2015 Session (3) Springs, Ropes, Linear Momentum and Rotations, 08.05.2015 1 Outline Springs
PSE Game Physics Session (3) Springs, Ropes, Linear Momentum and Rotations Oliver Meister, Roland Wittmann 08.05.2015 Session (3) Springs, Ropes, Linear Momentum and Rotations, 08.05.2015 1 Outline Springs
CS354 Computer Graphics Rotations and Quaternions
 Slide Credit: Don Fussell CS354 Computer Graphics Rotations and Quaternions Qixing Huang April 4th 2018 Orientation Position and Orientation The position of an object can be represented as a translation
Slide Credit: Don Fussell CS354 Computer Graphics Rotations and Quaternions Qixing Huang April 4th 2018 Orientation Position and Orientation The position of an object can be represented as a translation
Robotics. Lecture 5: Monte Carlo Localisation. See course website for up to date information.
 Robotics Lecture 5: Monte Carlo Localisation See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College London Review:
Robotics Lecture 5: Monte Carlo Localisation See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College London Review:
5. GENERALIZED INVERSE SOLUTIONS
 5. GENERALIZED INVERSE SOLUTIONS The Geometry of Generalized Inverse Solutions The generalized inverse solution to the control allocation problem involves constructing a matrix which satisfies the equation
5. GENERALIZED INVERSE SOLUTIONS The Geometry of Generalized Inverse Solutions The generalized inverse solution to the control allocation problem involves constructing a matrix which satisfies the equation
CMSC427: Computer Graphics Lecture Notes Last update: November 21, 2014
 CMSC427: Computer Graphics Lecture Notes Last update: November 21, 2014 TA: Josh Bradley 1 Linear Algebra Review 1.1 Vector Multiplication Suppose we have a vector a = [ x a y a ] T z a. Then for some
CMSC427: Computer Graphics Lecture Notes Last update: November 21, 2014 TA: Josh Bradley 1 Linear Algebra Review 1.1 Vector Multiplication Suppose we have a vector a = [ x a y a ] T z a. Then for some
CALCULATING TRANSFORMATIONS OF KINEMATIC CHAINS USING HOMOGENEOUS COORDINATES
 CALCULATING TRANSFORMATIONS OF KINEMATIC CHAINS USING HOMOGENEOUS COORDINATES YINGYING REN Abstract. In this paper, the applications of homogeneous coordinates are discussed to obtain an efficient model
CALCULATING TRANSFORMATIONS OF KINEMATIC CHAINS USING HOMOGENEOUS COORDINATES YINGYING REN Abstract. In this paper, the applications of homogeneous coordinates are discussed to obtain an efficient model
APN-065: Determining Rotations for Inertial Explorer and SPAN
 APN-065 Rev A APN-065: Determining Rotations for Inertial Explorer and SPAN Page 1 May 5, 2014 Both Inertial Explorer (IE) and SPAN use intrinsic -order Euler angles to define the rotation between the
APN-065 Rev A APN-065: Determining Rotations for Inertial Explorer and SPAN Page 1 May 5, 2014 Both Inertial Explorer (IE) and SPAN use intrinsic -order Euler angles to define the rotation between the
S U N G - E U I YO O N, K A I S T R E N D E R I N G F R E E LY A VA I L A B L E O N T H E I N T E R N E T
 S U N G - E U I YO O N, K A I S T R E N D E R I N G F R E E LY A VA I L A B L E O N T H E I N T E R N E T Copyright 2018 Sung-eui Yoon, KAIST freely available on the internet http://sglab.kaist.ac.kr/~sungeui/render
S U N G - E U I YO O N, K A I S T R E N D E R I N G F R E E LY A VA I L A B L E O N T H E I N T E R N E T Copyright 2018 Sung-eui Yoon, KAIST freely available on the internet http://sglab.kaist.ac.kr/~sungeui/render
Proceedings of the 6th Int. Conf. on Computer Analysis of Images and Patterns. Direct Obstacle Detection and Motion. from Spatio-Temporal Derivatives
 Proceedings of the 6th Int. Conf. on Computer Analysis of Images and Patterns CAIP'95, pp. 874-879, Prague, Czech Republic, Sep 1995 Direct Obstacle Detection and Motion from Spatio-Temporal Derivatives
Proceedings of the 6th Int. Conf. on Computer Analysis of Images and Patterns CAIP'95, pp. 874-879, Prague, Czech Republic, Sep 1995 Direct Obstacle Detection and Motion from Spatio-Temporal Derivatives
E19 Final Project Report Liquid Pong Simulation. E.A.Martin, X.D.Zhai
 E19 Final Project Report Liquid Pong Simulation E.A.Martin, X.D.Zhai December 22, 2012 Motivation and Goals Before embarking on this project, we decided to choose a project that extends the concepts learned
E19 Final Project Report Liquid Pong Simulation E.A.Martin, X.D.Zhai December 22, 2012 Motivation and Goals Before embarking on this project, we decided to choose a project that extends the concepts learned
SPARTAN ROBOTICS FRC 971
 SPARTAN ROBOTICS FRC 971 Controls Documentation 2015 Design Goals Create a reliable and effective system for controlling and debugging robot code that provides greater flexibility and higher performance
SPARTAN ROBOTICS FRC 971 Controls Documentation 2015 Design Goals Create a reliable and effective system for controlling and debugging robot code that provides greater flexibility and higher performance
Computer Animation Fundamentals. Animation Methods Keyframing Interpolation Kinematics Inverse Kinematics
 Computer Animation Fundamentals Animation Methods Keyframing Interpolation Kinematics Inverse Kinematics Lecture 21 6.837 Fall 2001 Conventional Animation Draw each frame of the animation great control
Computer Animation Fundamentals Animation Methods Keyframing Interpolation Kinematics Inverse Kinematics Lecture 21 6.837 Fall 2001 Conventional Animation Draw each frame of the animation great control
Here are the classes, structs, unions and interfaces with brief descriptions: ZeroRoboticsGame (The class of the game object that you will use )...
...") Class Index Class List Here are the classes, structs, unions and interfaces with brief descriptions: ZeroRoboticsGame (The class of the game object that you will use )...1 File Index File List Here is
Class Index Class List Here are the classes, structs, unions and interfaces with brief descriptions: ZeroRoboticsGame (The class of the game object that you will use )...1 File Index File List Here is
Reconfiguration Methods for On-orbit Servicing, Assembly, and Operations with Application to Space Telescopes. Swati Mohan
 Reconfiguration Methods for On-orbit Servicing, Assembly, and Operations with Application to Space Telescopes by Swati Mohan Submitted to the Department of Aeronautics and Astronautics in partial fulfillment
Reconfiguration Methods for On-orbit Servicing, Assembly, and Operations with Application to Space Telescopes by Swati Mohan Submitted to the Department of Aeronautics and Astronautics in partial fulfillment
Design of a dynamic simulation system for VR applications
 Design of a dynamic simulation system for VR applications Jan Bender Abstract A dynamic simulation system for VR applications consists of multiple parts. The first task that must be accomplished is the
Design of a dynamic simulation system for VR applications Jan Bender Abstract A dynamic simulation system for VR applications consists of multiple parts. The first task that must be accomplished is the
Stereo Wrap + Motion. Computer Vision I. CSE252A Lecture 17
 Stereo Wrap + Motion CSE252A Lecture 17 Some Issues Ambiguity Window size Window shape Lighting Half occluded regions Problem of Occlusion Stereo Constraints CONSTRAINT BRIEF DESCRIPTION 1-D Epipolar Search
Stereo Wrap + Motion CSE252A Lecture 17 Some Issues Ambiguity Window size Window shape Lighting Half occluded regions Problem of Occlusion Stereo Constraints CONSTRAINT BRIEF DESCRIPTION 1-D Epipolar Search
Simplified Orientation Determination in Ski Jumping using Inertial Sensor Data
 Simplified Orientation Determination in Ski Jumping using Inertial Sensor Data B.H. Groh 1, N. Weeger 1, F. Warschun 2, B.M. Eskofier 1 1 Digital Sports Group, Pattern Recognition Lab University of Erlangen-Nürnberg
Simplified Orientation Determination in Ski Jumping using Inertial Sensor Data B.H. Groh 1, N. Weeger 1, F. Warschun 2, B.M. Eskofier 1 1 Digital Sports Group, Pattern Recognition Lab University of Erlangen-Nürnberg
(1) and s k ωk. p k vk q
 and s k ωk. p k vk q") Sensing and Perception: Localization and positioning Isaac Sog Project Assignment: GNSS aided INS In this project assignment you will wor with a type of navigation system referred to as a global navigation
Sensing and Perception: Localization and positioning Isaac Sog Project Assignment: GNSS aided INS In this project assignment you will wor with a type of navigation system referred to as a global navigation
Trajectory Optimization
 Trajectory Optimization Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Recap We heard about RRT*, a sampling-based planning in high-dimensional cost
Trajectory Optimization Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Recap We heard about RRT*, a sampling-based planning in high-dimensional cost
Design and Optimization of the Thigh for an Exoskeleton based on Parallel Mechanism
 Design and Optimization of the Thigh for an Exoskeleton based on Parallel Mechanism Konstantin Kondak, Bhaskar Dasgupta, Günter Hommel Technische Universität Berlin, Institut für Technische Informatik
Design and Optimization of the Thigh for an Exoskeleton based on Parallel Mechanism Konstantin Kondak, Bhaskar Dasgupta, Günter Hommel Technische Universität Berlin, Institut für Technische Informatik
Chapter 3 Path Optimization
 Chapter 3 Path Optimization Background information on optimization is discussed in this chapter, along with the inequality constraints that are used for the problem. Additionally, the MATLAB program for
Chapter 3 Path Optimization Background information on optimization is discussed in this chapter, along with the inequality constraints that are used for the problem. Additionally, the MATLAB program for
Animation. Computer Graphics COMP 770 (236) Spring Instructor: Brandon Lloyd 4/23/07 1
 Spring Instructor: Brandon Lloyd 4/23/07 1") Animation Computer Graphics COMP 770 (236) Spring 2007 Instructor: Brandon Lloyd 4/23/07 1 Today s Topics Interpolation Forward and inverse kinematics Rigid body simulation Fluids Particle systems Behavioral
Animation Computer Graphics COMP 770 (236) Spring 2007 Instructor: Brandon Lloyd 4/23/07 1 Today s Topics Interpolation Forward and inverse kinematics Rigid body simulation Fluids Particle systems Behavioral
Computer Animation. Algorithms and Techniques. z< MORGAN KAUFMANN PUBLISHERS. Rick Parent Ohio State University AN IMPRINT OF ELSEVIER SCIENCE
 Computer Animation Algorithms and Techniques Rick Parent Ohio State University z< MORGAN KAUFMANN PUBLISHERS AN IMPRINT OF ELSEVIER SCIENCE AMSTERDAM BOSTON LONDON NEW YORK OXFORD PARIS SAN DIEGO SAN FRANCISCO
Computer Animation Algorithms and Techniques Rick Parent Ohio State University z< MORGAN KAUFMANN PUBLISHERS AN IMPRINT OF ELSEVIER SCIENCE AMSTERDAM BOSTON LONDON NEW YORK OXFORD PARIS SAN DIEGO SAN FRANCISCO
Camera Parameters Estimation from Hand-labelled Sun Sositions in Image Sequences
 Camera Parameters Estimation from Hand-labelled Sun Sositions in Image Sequences Jean-François Lalonde, Srinivasa G. Narasimhan and Alexei A. Efros {jlalonde,srinivas,efros}@cs.cmu.edu CMU-RI-TR-8-32 July
Camera Parameters Estimation from Hand-labelled Sun Sositions in Image Sequences Jean-François Lalonde, Srinivasa G. Narasimhan and Alexei A. Efros {jlalonde,srinivas,efros}@cs.cmu.edu CMU-RI-TR-8-32 July
Graphics (INFOGR ): Example Exam
: Example Exam") Graphics (INFOGR 2015-2016): Example Exam StudentID / studentnummer Last name / achternaam First name / voornaam Do not open the exam until instructed to do so! Read the instructions on this page carefully!
Graphics (INFOGR 2015-2016): Example Exam StudentID / studentnummer Last name / achternaam First name / voornaam Do not open the exam until instructed to do so! Read the instructions on this page carefully!
Session #5 2D Mechanisms: Mobility, Kinematic Analysis & Synthesis
 Session #5 2D Mechanisms: Mobility, Kinematic Analysis & Synthesis Courtesy of Design Simulation Technologies, Inc. Used with permission. Dan Frey Today s Agenda Collect assignment #2 Begin mechanisms
Session #5 2D Mechanisms: Mobility, Kinematic Analysis & Synthesis Courtesy of Design Simulation Technologies, Inc. Used with permission. Dan Frey Today s Agenda Collect assignment #2 Begin mechanisms
Ragdoll Physics. Abstract. 2 Background. 1 Introduction. Gabe Mulley, Matt Bittarelli. April 25th, Previous Work
 Ragdoll Physics Gabe Mulley, Matt Bittarelli April 25th, 2007 Abstract The goal of this project was to create a real-time, interactive, and above all, stable, ragdoll physics simulation. This simulation
Ragdoll Physics Gabe Mulley, Matt Bittarelli April 25th, 2007 Abstract The goal of this project was to create a real-time, interactive, and above all, stable, ragdoll physics simulation. This simulation
An Overview of a Probabilistic Tracker for Multiple Cooperative Tracking Agents
 An Overview of a Probabilistic Tracker for Multiple Cooperative Tracking Agents Roozbeh Mottaghi and Shahram Payandeh School of Engineering Science Faculty of Applied Sciences Simon Fraser University Burnaby,
An Overview of a Probabilistic Tracker for Multiple Cooperative Tracking Agents Roozbeh Mottaghi and Shahram Payandeh School of Engineering Science Faculty of Applied Sciences Simon Fraser University Burnaby,
Practical Robotics (PRAC)
") Practical Robotics (PRAC) A Mobile Robot Navigation System (1) - Sensor and Kinematic Modelling Nick Pears University of York, Department of Computer Science December 17, 2014 nep (UoY CS) PRAC Practical
Practical Robotics (PRAC) A Mobile Robot Navigation System (1) - Sensor and Kinematic Modelling Nick Pears University of York, Department of Computer Science December 17, 2014 nep (UoY CS) PRAC Practical
A Jacobian-Based Algorithm for Planning Attitude Maneuvers Using Forward and Reverse Rotations
 Sung K. Koh Department of Mechanical Engineering, Pohang University of Science and Technology, Pohang, 790-784, Republic of Korea e-mail: shkoh@postech.ac.kr Gregory S. Chirikjian Department of Mechanical
Sung K. Koh Department of Mechanical Engineering, Pohang University of Science and Technology, Pohang, 790-784, Republic of Korea e-mail: shkoh@postech.ac.kr Gregory S. Chirikjian Department of Mechanical
CSE 490R P1 - Localization using Particle Filters Due date: Sun, Jan 28-11:59 PM
 CSE 490R P1 - Localization using Particle Filters Due date: Sun, Jan 28-11:59 PM 1 Introduction In this assignment you will implement a particle filter to localize your car within a known map. This will
CSE 490R P1 - Localization using Particle Filters Due date: Sun, Jan 28-11:59 PM 1 Introduction In this assignment you will implement a particle filter to localize your car within a known map. This will
Applications. Human and animal motion Robotics control Hair Plants Molecular motion
 Multibody dynamics Applications Human and animal motion Robotics control Hair Plants Molecular motion Generalized coordinates Virtual work and generalized forces Lagrangian dynamics for mass points
Multibody dynamics Applications Human and animal motion Robotics control Hair Plants Molecular motion Generalized coordinates Virtual work and generalized forces Lagrangian dynamics for mass points
Distributed Consensus in Multivehicle Cooperative Control: Theory and Applications
 Distributed Consensus in Multivehicle Cooperative Control: Theory and Applications Wei Ren and Randal W. Beard Springer ISBN: 978-1-84800-014-8 Tutorial Slides Prepared by Wei Ren Department of Electrical
Distributed Consensus in Multivehicle Cooperative Control: Theory and Applications Wei Ren and Randal W. Beard Springer ISBN: 978-1-84800-014-8 Tutorial Slides Prepared by Wei Ren Department of Electrical
Comparison of ragdoll methods - Physics-based animation
 - Physics-based animation Stefan Glimberg - glimberg@diku.dk Morten Engel - engel@diku.dk Department of Computer Science, University of Copenhagen 23rd January 2007 Abstract Believability is the keyword
- Physics-based animation Stefan Glimberg - glimberg@diku.dk Morten Engel - engel@diku.dk Department of Computer Science, University of Copenhagen 23rd January 2007 Abstract Believability is the keyword
Information Fusion in Navigation Systems via Factor Graph Based Incremental Smoothing
 Information Fusion in Navigation Systems via Factor Graph Based Incremental Smoothing Vadim Indelman a, Stephen Williams a, Michael Kaess b, Frank Dellaert a a College of Computing, Georgia Institute of
Information Fusion in Navigation Systems via Factor Graph Based Incremental Smoothing Vadim Indelman a, Stephen Williams a, Michael Kaess b, Frank Dellaert a a College of Computing, Georgia Institute of
Reflection, Refraction and Polarization of Light
 Reflection, Refraction and Polarization of Light Physics 246/Spring2012 In today's laboratory several properties of light, including the laws of reflection, refraction, total internal reflection and polarization,
Reflection, Refraction and Polarization of Light Physics 246/Spring2012 In today's laboratory several properties of light, including the laws of reflection, refraction, total internal reflection and polarization,
EKF Localization and EKF SLAM incorporating prior information
 EKF Localization and EKF SLAM incorporating prior information Final Report ME- Samuel Castaneda ID: 113155 1. Abstract In the context of mobile robotics, before any motion planning or navigation algorithm
EKF Localization and EKF SLAM incorporating prior information Final Report ME- Samuel Castaneda ID: 113155 1. Abstract In the context of mobile robotics, before any motion planning or navigation algorithm
Geometric Transformations
 Geometric Transformations CS 4620 Lecture 9 2017 Steve Marschner 1 A little quick math background Notation for sets, functions, mappings Linear and affine transformations Matrices Matrix-vector multiplication
Geometric Transformations CS 4620 Lecture 9 2017 Steve Marschner 1 A little quick math background Notation for sets, functions, mappings Linear and affine transformations Matrices Matrix-vector multiplication
Cooperative Control Design Strategies with Local Interactions
 Cooperative Control Design Strategies with Local Interactions Wei Ren, Member, IEEE Abstract In this paper, we study cooperative control design strategies that only require local information exchange between
Cooperative Control Design Strategies with Local Interactions Wei Ren, Member, IEEE Abstract In this paper, we study cooperative control design strategies that only require local information exchange between
Innovative Test-beds for Validation of Motion Recognition Systems Intended for Orbital Capture Manoeuvres
 Innovative Test-beds for Validation of Motion Recognition Systems Intended for Orbital Capture Manoeuvres Tomasz Rybus 1, Karol Seweryn 1, Janusz Grzybowski 1, Janusz Nicolau-Kukliński 1, Rafał Przybyła
Innovative Test-beds for Validation of Motion Recognition Systems Intended for Orbital Capture Manoeuvres Tomasz Rybus 1, Karol Seweryn 1, Janusz Grzybowski 1, Janusz Nicolau-Kukliński 1, Rafał Przybyła
Adaptive back-stepping control applied on octocopter under recoil disturbance
 Journal of Engineering Science and Military Technologies ISSN: 2357-0954 DOI: 10.21608/ejmtc.2017.401.1004 Adaptive back-stepping control applied on octocopter under recoil disturbance GuangXue Zhang 1
Journal of Engineering Science and Military Technologies ISSN: 2357-0954 DOI: 10.21608/ejmtc.2017.401.1004 Adaptive back-stepping control applied on octocopter under recoil disturbance GuangXue Zhang 1
Quaternions and Rotations
 CSCI 520 Computer Animation and Simulation Quaternions and Rotations Jernej Barbic University of Southern California 1 Rotations Very important in computer animation and robotics Joint angles, rigid body
CSCI 520 Computer Animation and Simulation Quaternions and Rotations Jernej Barbic University of Southern California 1 Rotations Very important in computer animation and robotics Joint angles, rigid body
Department of. Computer Science. Remapping Subpartitions of. Hyperspace Using Iterative. Genetic Search. Keith Mathias and Darrell Whitley
 Department of Computer Science Remapping Subpartitions of Hyperspace Using Iterative Genetic Search Keith Mathias and Darrell Whitley Technical Report CS-4-11 January 7, 14 Colorado State University Remapping
Department of Computer Science Remapping Subpartitions of Hyperspace Using Iterative Genetic Search Keith Mathias and Darrell Whitley Technical Report CS-4-11 January 7, 14 Colorado State University Remapping
A Stable Docking Operation by a Group of Space Robots
 A Stable Docking Operation by a Group of Space Robots Vijay Kumar 1, Pushpraj M Pathak 2 Mechanical and Industrial Engineering Department Indian Institute of Technology, Roorkee Roorkee-247667, India 1
A Stable Docking Operation by a Group of Space Robots Vijay Kumar 1, Pushpraj M Pathak 2 Mechanical and Industrial Engineering Department Indian Institute of Technology, Roorkee Roorkee-247667, India 1
Model Based Pose Estimation. from Uncertain Data. Thesis submitted for the degree \Doctor of Philosophy" Yacov Hel-Or
 Model Based Pose Estimation from Uncertain Data Thesis submitted for the degree \Doctor of Philosophy" Yacov Hel-Or Submitted to the Senate of the Hebrew University in Jerusalem (1993) ii This work was
Model Based Pose Estimation from Uncertain Data Thesis submitted for the degree \Doctor of Philosophy" Yacov Hel-Or Submitted to the Senate of the Hebrew University in Jerusalem (1993) ii This work was
Engineering Effects of Boundary Conditions (Fixtures and Temperatures) J.E. Akin, Rice University, Mechanical Engineering
 J.E. Akin, Rice University, Mechanical Engineering") Engineering Effects of Boundary Conditions (Fixtures and Temperatures) J.E. Akin, Rice University, Mechanical Engineering Here SolidWorks stress simulation tutorials will be re-visited to show how they
Engineering Effects of Boundary Conditions (Fixtures and Temperatures) J.E. Akin, Rice University, Mechanical Engineering Here SolidWorks stress simulation tutorials will be re-visited to show how they
Autonomous Navigation for Flying Robots
 Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 3.1: 3D Geometry Jürgen Sturm Technische Universität München Points in 3D 3D point Augmented vector Homogeneous
Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 3.1: 3D Geometry Jürgen Sturm Technische Universität München Points in 3D 3D point Augmented vector Homogeneous
Autonomous Navigation for Flying Robots
 Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 3.2: Sensors Jürgen Sturm Technische Universität München Sensors IMUs (inertial measurement units) Accelerometers
Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 3.2: Sensors Jürgen Sturm Technische Universität München Sensors IMUs (inertial measurement units) Accelerometers
Week 7: 2-D Haptic Rendering
 ME 20N: Haptics: Engineering Touch Autumn 2017 Week 7: 2-D Haptic Rendering Allison M. Okamura Stanford University 2-D Rendering 1 2 The Haptic Joint sensors Haptic device Θ Forward kinematic equations
ME 20N: Haptics: Engineering Touch Autumn 2017 Week 7: 2-D Haptic Rendering Allison M. Okamura Stanford University 2-D Rendering 1 2 The Haptic Joint sensors Haptic device Θ Forward kinematic equations
Spacecraft Actuation Using CMGs and VSCMGs
 Spacecraft Actuation Using CMGs and VSCMGs Arjun Narayanan and Ravi N Banavar (ravi.banavar@gmail.com) 1 1 Systems and Control Engineering, IIT Bombay, India Research Symposium, ISRO-IISc Space Technology
Spacecraft Actuation Using CMGs and VSCMGs Arjun Narayanan and Ravi N Banavar (ravi.banavar@gmail.com) 1 1 Systems and Control Engineering, IIT Bombay, India Research Symposium, ISRO-IISc Space Technology