Autonomous Mobile Robot Design
|
|
|
- Kelley Allison
- 5 years ago
- Views:
Transcription

1 Autonomous Mobile Robot Design Topic: EKF-based SLAM Dr. Kostas Alexis (CSE)


2 These slides have partially relied on the course of C. Stachniss, Robot Mapping - WS 2013/14 Autonomous Robot Challenges Where am I? What is my environment?
3 Simultaneous Localization and Mapping Building a map and locate the robot in the map at the same time Chicken or Egg problem Map Localize
4 Definition of the SLAM Problem Given: The robot s controls Observations Wanted: Map of the environment Path of the robot
5 Recall: The Bayes filter concept For each time step, do: Apply motion model: Apply sensor model: η is a normalization factor to ensure that the probability is maximum 1.

6 EKF for Online SLAM The EKF provides a solution to the online SLAM problem, i.e.: Find the latest pose of the robot
7 Recall: The Extended Kalman Filter
8 Recall: The Extended Kalman Filter Prediction Step Correction Step
9 Recall: The Extended Kalman Filter EKF works for nonlinear models Prediction Step Correction Step
10 Recall: The Extended Kalman Filter Process noise Prediction Step Correction Step
11 Recall: The Extended Kalman Filter Prediction Step Kalman Gain: how certain the robot for its predicted belief and its measurements? Correction Step
12 Recall: The Extended Kalman Filter Prediction Step Sensor noise Correction Step
13 Recall: The Extended Kalman Filter Prediction Step Correction Step
14 Recall: The Extended Kalman Filter Prediction Step Correction Step
15 EKF SLAM concept Application of the EKF to SLAM Estimate robot s pose and location of features in the environment Assumption: feature correspondence is known State space parametrization:




16 Assume a simple 3DoF robot The pose of a simplified robot in the 2D configuration space is defined by its x-y coordinates and the heading angle θ. The heading angle of the robot affects its dynamic trajectory in the x-y space. Let us defined the rotation matrix:
-dimensional Gaussian Belief is represented through the")
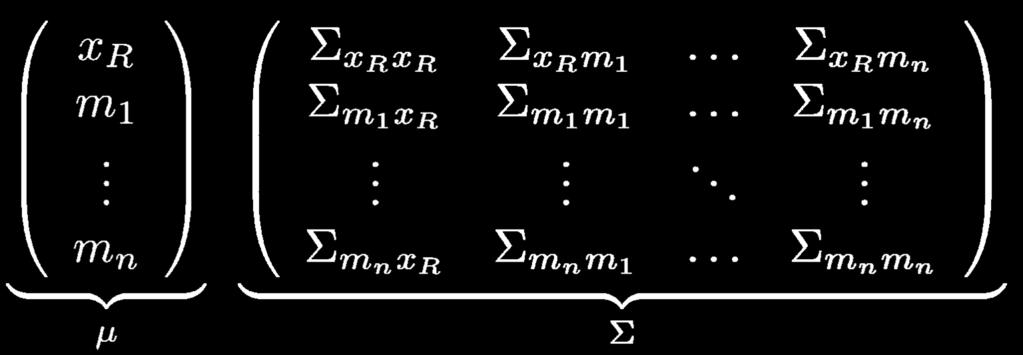
17 EKF SLAM: State representation Map with n landmarks: (3+2n)-dimensional Gaussian Belief is represented through the covariance matrix

18 EKF SLAM: State representation Compact representation of the covariance matrix

19 EKF SLAM: State representation More compactly (and simplifying notation as ):
20 EKF SLAM: Filter Cycle 1. State Prediction 2. Measurement Prediction 3. Measurement 4. Data Association 5. Update
21 EKF SLAM: State Prediction
22 EKF SLAM: State Prediction
23 EKF SLAM: Measurement Prediction
24 EKF SLAM: Obtained Measurement
25 EKF SLAM: Data Association data association and distance calculation
26 EKF SLAM: Update Step

27 EKF SLAM: Update Step
28 EKF-SLAM: Comprehensive Example Setup: Robot moves in the 2D plane Velocity-based motion model Robot observes point landmarks (x,y) Range-bearing sensor Known data association Known-fixed number of landmarks
29 Initialization Robot starts in its own reference coordinate frame (all landmarks unknown) 2N+3 dimensions
30 Initialization Robot starts in its own reference coordinate frame (all landmarks unknown) 2N+3 dimensions
 2N+3")
31 Initialization Robot starts in its own reference coordinate frame (all landmarks unknown) 2N+3 dimensions
32 EKF Algorithm
33 Prediction Step (motion) Goal: Update state space based on the robot s motion (Velocity-based) Robot motion on the plane


34 Prediction Step (motion) Goal: Update state space based on the robot s motion (Velocity-based) Robot motion on the plane How can this be mapped to the 2N+3 dimensional space?



35 Update the State Space From the motion on the plane To the 2N+3 dimensional space
36 EKF Algorithm Done!
37 Update Covariance The function g only affects the robot s motion and not the landmarks Jacobian of the motion (3x3) Identity (2Nx2N)
 Identity (2Nx2N) The landmark positions don t change during the prediction")
38 Update Covariance The function g only affects the robot s motion and not the landmarks Jacobian of the motion (3x3) Identity (2Nx2N) The landmark positions don t change during the prediction step
39 Jacobian of the Motion Calculate the Jacobian: no dependency on x and y (velocity-based model)

40 Jacobian of the Motion Calculate the Jacobian: no dependency on x and y (velocity-based model)
41 Then this moves us to the update Done!


42 Then this moves us to the update Done! not updated during the prediction step
43 EKF Algorithm Done! Done!


44 EKF SLAM - Prediction Maps from the low-dim space to the high-dim space
45 EKF Algorithm Done! Apply & Done!

46 Indexing of measurements EKF SLAM - Correction Known data association : i-th measurement observes the landmark with index j Initialize landmark if unobserved Compute the expected observation Compute the Jacobian of h Then, proceed with computing the Kalman Gain

47 Range-Bearing Observation Range-bearing observation If landmark has not been observed observed location of landmark j estimated robot s location relative measurement
48 Expected Observation Compute expected observation according to the current estimate Where the robot expects to see the landmark
49 Jacobian of the Observation Based on: Compute the Jacobian: low-dim space

50 Jacobian of the Observation Based on: Compute the Jacobian: low-dim space

51 Jacobian of the Observation Use the computed Jacobian: Map it to the high dimensional space
52 Next steps Done! Done!

53 Next steps Done! Done! Apply & Done Apply & Done Apply & Done
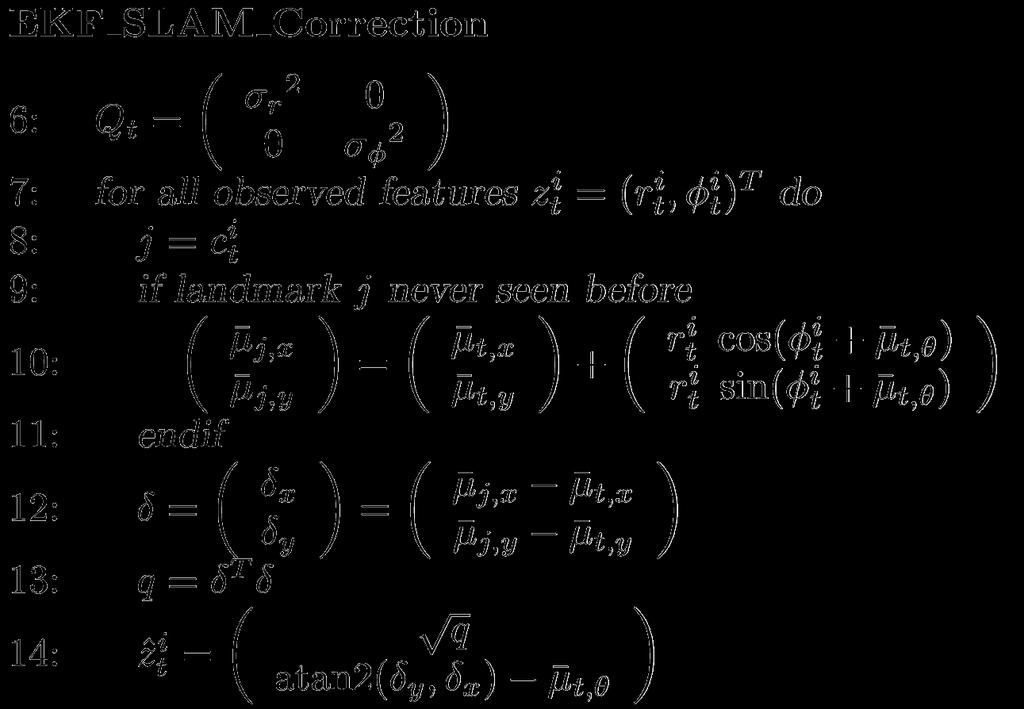
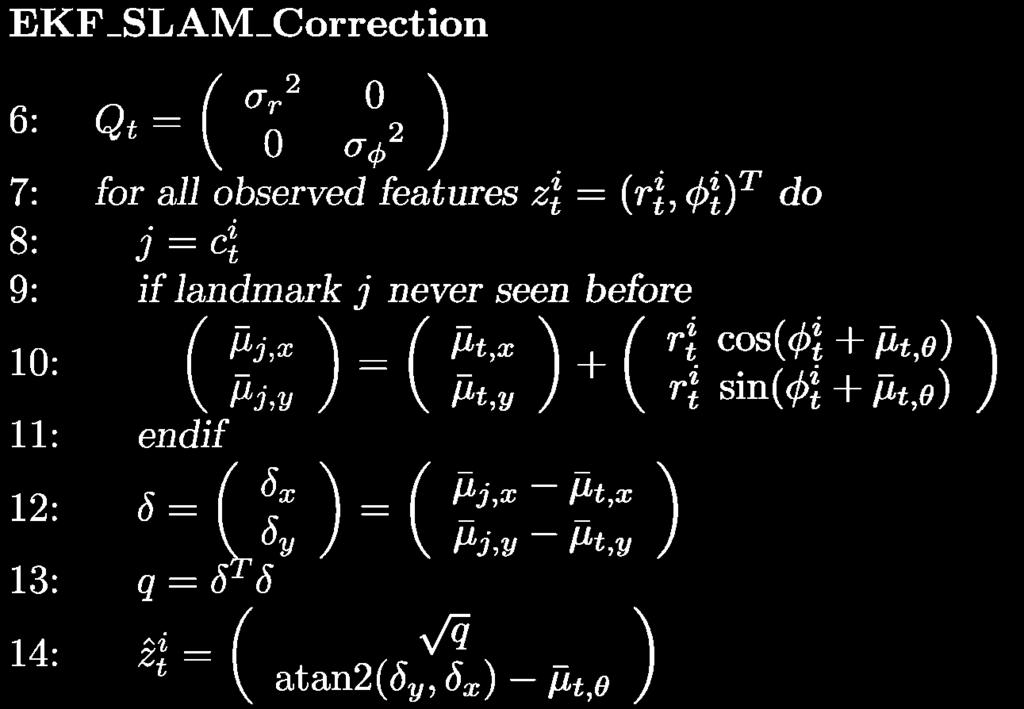
54 EKF SLAM Correction [1/2]

55 EKF SLAM Correction [2/2]
56 Implementation Notes Measurement update in a single step requires only one full belief update Always normalize the angular components
57

58 almost
59 Loop Closing Recognizing an already mapped area Data association with High ambiguity Possible environmental symmetries Uncertainties collapse after a loop closure (even if the loop closure was not correct )

60 Before the Loop Closure

61 After the Loop Closure

62 Code Examples and Tasks Conduct Camera Calibration MATLAB: /localization-mapping/ekf-mono-slam


63 How does this apply to my project? To estimate the pose of the robot and the map within the environment that it navigates
64 Find out more ionfornavigation_newman06.pdf /SLAM%20course.pdf Course of C. Stachniss, Robot Mapping - WS 2013/14

65 Thank you! Please ask your question!
Particle Filter in Brief. Robot Mapping. FastSLAM Feature-based SLAM with Particle Filters. Particle Representation. Particle Filter Algorithm
 Robot Mapping FastSLAM Feature-based SLAM with Particle Filters Cyrill Stachniss Particle Filter in Brief! Non-parametric, recursive Bayes filter! Posterior is represented by a set of weighted samples!
Robot Mapping FastSLAM Feature-based SLAM with Particle Filters Cyrill Stachniss Particle Filter in Brief! Non-parametric, recursive Bayes filter! Posterior is represented by a set of weighted samples!
Simultaneous Localization and Mapping
 Sebastian Lembcke SLAM 1 / 29 MIN Faculty Department of Informatics Simultaneous Localization and Mapping Visual Loop-Closure Detection University of Hamburg Faculty of Mathematics, Informatics and Natural
Sebastian Lembcke SLAM 1 / 29 MIN Faculty Department of Informatics Simultaneous Localization and Mapping Visual Loop-Closure Detection University of Hamburg Faculty of Mathematics, Informatics and Natural
Introduction to Mobile Robotics SLAM Landmark-based FastSLAM
 Introduction to Mobile Robotics SLAM Landmark-based FastSLAM Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello Partial slide courtesy of Mike Montemerlo 1 The SLAM Problem
Introduction to Mobile Robotics SLAM Landmark-based FastSLAM Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello Partial slide courtesy of Mike Montemerlo 1 The SLAM Problem
EKF Localization and EKF SLAM incorporating prior information
 EKF Localization and EKF SLAM incorporating prior information Final Report ME- Samuel Castaneda ID: 113155 1. Abstract In the context of mobile robotics, before any motion planning or navigation algorithm
EKF Localization and EKF SLAM incorporating prior information Final Report ME- Samuel Castaneda ID: 113155 1. Abstract In the context of mobile robotics, before any motion planning or navigation algorithm
Data Association for SLAM
 CALIFORNIA INSTITUTE OF TECHNOLOGY ME/CS 132a, Winter 2011 Lab #2 Due: Mar 10th, 2011 Part I Data Association for SLAM 1 Introduction For this part, you will experiment with a simulation of an EKF SLAM
CALIFORNIA INSTITUTE OF TECHNOLOGY ME/CS 132a, Winter 2011 Lab #2 Due: Mar 10th, 2011 Part I Data Association for SLAM 1 Introduction For this part, you will experiment with a simulation of an EKF SLAM
Robot Mapping. A Short Introduction to the Bayes Filter and Related Models. Gian Diego Tipaldi, Wolfram Burgard
 Robot Mapping A Short Introduction to the Bayes Filter and Related Models Gian Diego Tipaldi, Wolfram Burgard 1 State Estimation Estimate the state of a system given observations and controls Goal: 2 Recursive
Robot Mapping A Short Introduction to the Bayes Filter and Related Models Gian Diego Tipaldi, Wolfram Burgard 1 State Estimation Estimate the state of a system given observations and controls Goal: 2 Recursive
Overview. EECS 124, UC Berkeley, Spring 2008 Lecture 23: Localization and Mapping. Statistical Models
 Introduction ti to Embedded dsystems EECS 124, UC Berkeley, Spring 2008 Lecture 23: Localization and Mapping Gabe Hoffmann Ph.D. Candidate, Aero/Astro Engineering Stanford University Statistical Models
Introduction ti to Embedded dsystems EECS 124, UC Berkeley, Spring 2008 Lecture 23: Localization and Mapping Gabe Hoffmann Ph.D. Candidate, Aero/Astro Engineering Stanford University Statistical Models
Augmented Reality, Advanced SLAM, Applications
 Augmented Reality, Advanced SLAM, Applications Prof. Didier Stricker & Dr. Alain Pagani alain.pagani@dfki.de Lecture 3D Computer Vision AR, SLAM, Applications 1 Introduction Previous lectures: Basics (camera,
Augmented Reality, Advanced SLAM, Applications Prof. Didier Stricker & Dr. Alain Pagani alain.pagani@dfki.de Lecture 3D Computer Vision AR, SLAM, Applications 1 Introduction Previous lectures: Basics (camera,
High-precision, consistent EKF-based visual-inertial odometry
 High-precision, consistent EKF-based visual-inertial odometry Mingyang Li and Anastasios I. Mourikis, IJRR 2013 Ao Li Introduction What is visual-inertial odometry (VIO)? The problem of motion tracking
High-precision, consistent EKF-based visual-inertial odometry Mingyang Li and Anastasios I. Mourikis, IJRR 2013 Ao Li Introduction What is visual-inertial odometry (VIO)? The problem of motion tracking
Mobile Robotics. Mathematics, Models, and Methods. HI Cambridge. Alonzo Kelly. Carnegie Mellon University UNIVERSITY PRESS
 Mobile Robotics Mathematics, Models, and Methods Alonzo Kelly Carnegie Mellon University HI Cambridge UNIVERSITY PRESS Contents Preface page xiii 1 Introduction 1 1.1 Applications of Mobile Robots 2 1.2
Mobile Robotics Mathematics, Models, and Methods Alonzo Kelly Carnegie Mellon University HI Cambridge UNIVERSITY PRESS Contents Preface page xiii 1 Introduction 1 1.1 Applications of Mobile Robots 2 1.2
Particle Filters. CSE-571 Probabilistic Robotics. Dependencies. Particle Filter Algorithm. Fast-SLAM Mapping
 CSE-571 Probabilistic Robotics Fast-SLAM Mapping Particle Filters Represent belief by random samples Estimation of non-gaussian, nonlinear processes Sampling Importance Resampling (SIR) principle Draw
CSE-571 Probabilistic Robotics Fast-SLAM Mapping Particle Filters Represent belief by random samples Estimation of non-gaussian, nonlinear processes Sampling Importance Resampling (SIR) principle Draw
UNIVERSITÀ DEGLI STUDI DI GENOVA MASTER S THESIS
 UNIVERSITÀ DEGLI STUDI DI GENOVA MASTER S THESIS Integrated Cooperative SLAM with Visual Odometry within teams of autonomous planetary exploration rovers Author: Ekaterina Peshkova Supervisors: Giuseppe
UNIVERSITÀ DEGLI STUDI DI GENOVA MASTER S THESIS Integrated Cooperative SLAM with Visual Odometry within teams of autonomous planetary exploration rovers Author: Ekaterina Peshkova Supervisors: Giuseppe
Probabilistic Robotics
 Probabilistic Robotics FastSLAM Sebastian Thrun (abridged and adapted by Rodrigo Ventura in Oct-2008) The SLAM Problem SLAM stands for simultaneous localization and mapping The task of building a map while
Probabilistic Robotics FastSLAM Sebastian Thrun (abridged and adapted by Rodrigo Ventura in Oct-2008) The SLAM Problem SLAM stands for simultaneous localization and mapping The task of building a map while
COS Lecture 13 Autonomous Robot Navigation
 COS 495 - Lecture 13 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
COS 495 - Lecture 13 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
Robotics. Lecture 7: Simultaneous Localisation and Mapping (SLAM)
") Robotics Lecture 7: Simultaneous Localisation and Mapping (SLAM) See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College
Robotics Lecture 7: Simultaneous Localisation and Mapping (SLAM) See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College
Robotics. Chapter 25. Chapter 25 1
 Robotics Chapter 25 Chapter 25 1 Outline Robots, Effectors, and Sensors Localization and Mapping Motion Planning Chapter 25 2 Mobile Robots Chapter 25 3 Manipulators P R R R R R Configuration of robot
Robotics Chapter 25 Chapter 25 1 Outline Robots, Effectors, and Sensors Localization and Mapping Motion Planning Chapter 25 2 Mobile Robots Chapter 25 3 Manipulators P R R R R R Configuration of robot
Robotics. Lecture 8: Simultaneous Localisation and Mapping (SLAM)
") Robotics Lecture 8: Simultaneous Localisation and Mapping (SLAM) See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College
Robotics Lecture 8: Simultaneous Localisation and Mapping (SLAM) See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College
Robot Mapping. Graph-Based SLAM with Landmarks. Cyrill Stachniss
 Robot Mapping Graph-Based SLAM with Landmarks Cyrill Stachniss 1 Graph-Based SLAM (Chap. 15) Use a graph to represent the problem Every node in the graph corresponds to a pose of the robot during mapping
Robot Mapping Graph-Based SLAM with Landmarks Cyrill Stachniss 1 Graph-Based SLAM (Chap. 15) Use a graph to represent the problem Every node in the graph corresponds to a pose of the robot during mapping
What is the SLAM problem?
 SLAM Tutorial Slides by Marios Xanthidis, C. Stachniss, P. Allen, C. Fermuller Paul Furgale, Margarita Chli, Marco Hutter, Martin Rufli, Davide Scaramuzza, Roland Siegwart What is the SLAM problem? The
SLAM Tutorial Slides by Marios Xanthidis, C. Stachniss, P. Allen, C. Fermuller Paul Furgale, Margarita Chli, Marco Hutter, Martin Rufli, Davide Scaramuzza, Roland Siegwart What is the SLAM problem? The
L15. POSE-GRAPH SLAM. NA568 Mobile Robotics: Methods & Algorithms
 L15. POSE-GRAPH SLAM NA568 Mobile Robotics: Methods & Algorithms Today s Topic Nonlinear Least Squares Pose-Graph SLAM Incremental Smoothing and Mapping Feature-Based SLAM Filtering Problem: Motion Prediction
L15. POSE-GRAPH SLAM NA568 Mobile Robotics: Methods & Algorithms Today s Topic Nonlinear Least Squares Pose-Graph SLAM Incremental Smoothing and Mapping Feature-Based SLAM Filtering Problem: Motion Prediction
Implementation of Odometry with EKF for Localization of Hector SLAM Method
 Implementation of Odometry with EKF for Localization of Hector SLAM Method Kao-Shing Hwang 1 Wei-Cheng Jiang 2 Zuo-Syuan Wang 3 Department of Electrical Engineering, National Sun Yat-sen University, Kaohsiung,
Implementation of Odometry with EKF for Localization of Hector SLAM Method Kao-Shing Hwang 1 Wei-Cheng Jiang 2 Zuo-Syuan Wang 3 Department of Electrical Engineering, National Sun Yat-sen University, Kaohsiung,
ECE276A: Sensing & Estimation in Robotics Lecture 11: Simultaneous Localization and Mapping using a Particle Filter
 ECE276A: Sensing & Estimation in Robotics Lecture 11: Simultaneous Localization and Mapping using a Particle Filter Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Siwei Guo: s9guo@eng.ucsd.edu
ECE276A: Sensing & Estimation in Robotics Lecture 11: Simultaneous Localization and Mapping using a Particle Filter Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Siwei Guo: s9guo@eng.ucsd.edu
Monocular SLAM for a Small-Size Humanoid Robot
 Tamkang Journal of Science and Engineering, Vol. 14, No. 2, pp. 123 129 (2011) 123 Monocular SLAM for a Small-Size Humanoid Robot Yin-Tien Wang*, Duen-Yan Hung and Sheng-Hsien Cheng Department of Mechanical
Tamkang Journal of Science and Engineering, Vol. 14, No. 2, pp. 123 129 (2011) 123 Monocular SLAM for a Small-Size Humanoid Robot Yin-Tien Wang*, Duen-Yan Hung and Sheng-Hsien Cheng Department of Mechanical
SLAM with SIFT (aka Mobile Robot Localization and Mapping with Uncertainty using Scale-Invariant Visual Landmarks ) Se, Lowe, and Little
 Se, Lowe, and Little") SLAM with SIFT (aka Mobile Robot Localization and Mapping with Uncertainty using Scale-Invariant Visual Landmarks ) Se, Lowe, and Little + Presented by Matt Loper CS296-3: Robot Learning and Autonomy Brown
SLAM with SIFT (aka Mobile Robot Localization and Mapping with Uncertainty using Scale-Invariant Visual Landmarks ) Se, Lowe, and Little + Presented by Matt Loper CS296-3: Robot Learning and Autonomy Brown
MULTI-MODAL MAPPING. Robotics Day, 31 Mar Frank Mascarich, Shehryar Khattak, Tung Dang
 MULTI-MODAL MAPPING Robotics Day, 31 Mar 2017 Frank Mascarich, Shehryar Khattak, Tung Dang Application-Specific Sensors Cameras TOF Cameras PERCEPTION LiDAR IMU Localization Mapping Autonomy Robotic Perception
MULTI-MODAL MAPPING Robotics Day, 31 Mar 2017 Frank Mascarich, Shehryar Khattak, Tung Dang Application-Specific Sensors Cameras TOF Cameras PERCEPTION LiDAR IMU Localization Mapping Autonomy Robotic Perception
Practical Course WS12/13 Introduction to Monte Carlo Localization
 Practical Course WS12/13 Introduction to Monte Carlo Localization Cyrill Stachniss and Luciano Spinello 1 State Estimation Estimate the state of a system given observations and controls Goal: 2 Bayes Filter
Practical Course WS12/13 Introduction to Monte Carlo Localization Cyrill Stachniss and Luciano Spinello 1 State Estimation Estimate the state of a system given observations and controls Goal: 2 Bayes Filter
Simuntaneous Localisation and Mapping with a Single Camera. Abhishek Aneja and Zhichao Chen
 Simuntaneous Localisation and Mapping with a Single Camera Abhishek Aneja and Zhichao Chen 3 December, Simuntaneous Localisation and Mapping with asinglecamera 1 Abstract Image reconstruction is common
Simuntaneous Localisation and Mapping with a Single Camera Abhishek Aneja and Zhichao Chen 3 December, Simuntaneous Localisation and Mapping with asinglecamera 1 Abstract Image reconstruction is common
Probabilistic Robotics. FastSLAM
 Probabilistic Robotics FastSLAM The SLAM Problem SLAM stands for simultaneous localization and mapping The task of building a map while estimating the pose of the robot relative to this map Why is SLAM
Probabilistic Robotics FastSLAM The SLAM Problem SLAM stands for simultaneous localization and mapping The task of building a map while estimating the pose of the robot relative to this map Why is SLAM
Nonlinear State Estimation for Robotics and Computer Vision Applications: An Overview
 Nonlinear State Estimation for Robotics and Computer Vision Applications: An Overview Arun Das 05/09/2017 Arun Das Waterloo Autonomous Vehicles Lab Introduction What s in a name? Arun Das Waterloo Autonomous
Nonlinear State Estimation for Robotics and Computer Vision Applications: An Overview Arun Das 05/09/2017 Arun Das Waterloo Autonomous Vehicles Lab Introduction What s in a name? Arun Das Waterloo Autonomous
L10. PARTICLE FILTERING CONTINUED. NA568 Mobile Robotics: Methods & Algorithms
 L10. PARTICLE FILTERING CONTINUED NA568 Mobile Robotics: Methods & Algorithms Gaussian Filters The Kalman filter and its variants can only model (unimodal) Gaussian distributions Courtesy: K. Arras Motivation
L10. PARTICLE FILTERING CONTINUED NA568 Mobile Robotics: Methods & Algorithms Gaussian Filters The Kalman filter and its variants can only model (unimodal) Gaussian distributions Courtesy: K. Arras Motivation
Turning an Automated System into an Autonomous system using Model-Based Design Autonomous Tech Conference 2018
 Turning an Automated System into an Autonomous system using Model-Based Design Autonomous Tech Conference 2018 Asaf Moses Systematics Ltd., Technical Product Manager aviasafm@systematics.co.il 1 Autonomous
Turning an Automated System into an Autonomous system using Model-Based Design Autonomous Tech Conference 2018 Asaf Moses Systematics Ltd., Technical Product Manager aviasafm@systematics.co.il 1 Autonomous
Humanoid Robotics. Least Squares. Maren Bennewitz
 Humanoid Robotics Least Squares Maren Bennewitz Goal of This Lecture Introduction into least squares Use it yourself for odometry calibration, later in the lecture: camera and whole-body self-calibration
Humanoid Robotics Least Squares Maren Bennewitz Goal of This Lecture Introduction into least squares Use it yourself for odometry calibration, later in the lecture: camera and whole-body self-calibration
CSE 527: Introduction to Computer Vision
 CSE 527: Introduction to Computer Vision Week 10 Class 2: Visual Odometry November 2nd, 2017 Today Visual Odometry Intro Algorithm SLAM Visual Odometry Input Output Images, Video Camera trajectory, motion
CSE 527: Introduction to Computer Vision Week 10 Class 2: Visual Odometry November 2nd, 2017 Today Visual Odometry Intro Algorithm SLAM Visual Odometry Input Output Images, Video Camera trajectory, motion
BBR Progress Report 006: Autonomous 2-D Mapping of a Building Floor
 BBR Progress Report 006: Autonomous 2-D Mapping of a Building Floor Andy Sayler & Constantin Berzan November 30, 2010 Abstract In the past two weeks, we implemented and tested landmark extraction based
BBR Progress Report 006: Autonomous 2-D Mapping of a Building Floor Andy Sayler & Constantin Berzan November 30, 2010 Abstract In the past two weeks, we implemented and tested landmark extraction based
Humanoid Robotics. Monte Carlo Localization. Maren Bennewitz
 Humanoid Robotics Monte Carlo Localization Maren Bennewitz 1 Basis Probability Rules (1) If x and y are independent: Bayes rule: Often written as: The denominator is a normalizing constant that ensures
Humanoid Robotics Monte Carlo Localization Maren Bennewitz 1 Basis Probability Rules (1) If x and y are independent: Bayes rule: Often written as: The denominator is a normalizing constant that ensures
Introduction to Mobile Robotics. SLAM: Simultaneous Localization and Mapping
 Introduction to Mobile Robotics SLAM: Simultaneous Localization and Mapping The SLAM Problem SLAM is the process by which a robot builds a map of the environment and, at the same time, uses this map to
Introduction to Mobile Robotics SLAM: Simultaneous Localization and Mapping The SLAM Problem SLAM is the process by which a robot builds a map of the environment and, at the same time, uses this map to
Robot Mapping. Grid Maps. Gian Diego Tipaldi, Wolfram Burgard
 Robot Mapping Grid Maps Gian Diego Tipaldi, Wolfram Burgard 1 Features vs. Volumetric Maps Courtesy: D. Hähnel Courtesy: E. Nebot 2 Features So far, we only used feature maps Natural choice for Kalman
Robot Mapping Grid Maps Gian Diego Tipaldi, Wolfram Burgard 1 Features vs. Volumetric Maps Courtesy: D. Hähnel Courtesy: E. Nebot 2 Features So far, we only used feature maps Natural choice for Kalman
Probabilistic Robotics
 Probabilistic Robotics Bayes Filter Implementations Discrete filters, Particle filters Piecewise Constant Representation of belief 2 Discrete Bayes Filter Algorithm 1. Algorithm Discrete_Bayes_filter(
Probabilistic Robotics Bayes Filter Implementations Discrete filters, Particle filters Piecewise Constant Representation of belief 2 Discrete Bayes Filter Algorithm 1. Algorithm Discrete_Bayes_filter(
Robot Mapping. Graph-Based SLAM with Landmarks. Cyrill Stachniss
 Robot Mapping Graph-Based SLAM with Landmarks Cyrill Stachniss 1 Graph-Based SLAM (Chap. 15) Use a graph to represent the problem Every node in the graph corresponds to a pose of the robot during mapping
Robot Mapping Graph-Based SLAM with Landmarks Cyrill Stachniss 1 Graph-Based SLAM (Chap. 15) Use a graph to represent the problem Every node in the graph corresponds to a pose of the robot during mapping
Optimization of the Simultaneous Localization and Map-Building Algorithm for Real-Time Implementation
 242 IEEE TRANSACTIONS ON ROBOTICS AND AUTOMATION, VOL. 17, NO. 3, JUNE 2001 Optimization of the Simultaneous Localization and Map-Building Algorithm for Real-Time Implementation José E. Guivant and Eduardo
242 IEEE TRANSACTIONS ON ROBOTICS AND AUTOMATION, VOL. 17, NO. 3, JUNE 2001 Optimization of the Simultaneous Localization and Map-Building Algorithm for Real-Time Implementation José E. Guivant and Eduardo
ICRA 2016 Tutorial on SLAM. Graph-Based SLAM and Sparsity. Cyrill Stachniss
 ICRA 2016 Tutorial on SLAM Graph-Based SLAM and Sparsity Cyrill Stachniss 1 Graph-Based SLAM?? 2 Graph-Based SLAM?? SLAM = simultaneous localization and mapping 3 Graph-Based SLAM?? SLAM = simultaneous
ICRA 2016 Tutorial on SLAM Graph-Based SLAM and Sparsity Cyrill Stachniss 1 Graph-Based SLAM?? 2 Graph-Based SLAM?? SLAM = simultaneous localization and mapping 3 Graph-Based SLAM?? SLAM = simultaneous
L17. OCCUPANCY MAPS. NA568 Mobile Robotics: Methods & Algorithms
 L17. OCCUPANCY MAPS NA568 Mobile Robotics: Methods & Algorithms Today s Topic Why Occupancy Maps? Bayes Binary Filters Log-odds Occupancy Maps Inverse sensor model Learning inverse sensor model ML map
L17. OCCUPANCY MAPS NA568 Mobile Robotics: Methods & Algorithms Today s Topic Why Occupancy Maps? Bayes Binary Filters Log-odds Occupancy Maps Inverse sensor model Learning inverse sensor model ML map
Localization and Map Building
 Localization and Map Building Noise and aliasing; odometric position estimation To localize or not to localize Belief representation Map representation Probabilistic map-based localization Other examples
Localization and Map Building Noise and aliasing; odometric position estimation To localize or not to localize Belief representation Map representation Probabilistic map-based localization Other examples
ME 456: Probabilistic Robotics
 ME 456: Probabilistic Robotics Week 5, Lecture 2 SLAM Reading: Chapters 10,13 HW 2 due Oct 30, 11:59 PM Introduction In state esemaeon and Bayes filter lectures, we showed how to find robot s pose based
ME 456: Probabilistic Robotics Week 5, Lecture 2 SLAM Reading: Chapters 10,13 HW 2 due Oct 30, 11:59 PM Introduction In state esemaeon and Bayes filter lectures, we showed how to find robot s pose based
Dealing with Scale. Stephan Weiss Computer Vision Group NASA-JPL / CalTech
 Dealing with Scale Stephan Weiss Computer Vision Group NASA-JPL / CalTech Stephan.Weiss@ieee.org (c) 2013. Government sponsorship acknowledged. Outline Why care about size? The IMU as scale provider: The
Dealing with Scale Stephan Weiss Computer Vision Group NASA-JPL / CalTech Stephan.Weiss@ieee.org (c) 2013. Government sponsorship acknowledged. Outline Why care about size? The IMU as scale provider: The
Navigation methods and systems
 Navigation methods and systems Navigare necesse est Content: Navigation of mobile robots a short overview Maps Motion Planning SLAM (Simultaneous Localization and Mapping) Navigation of mobile robots a
Navigation methods and systems Navigare necesse est Content: Navigation of mobile robots a short overview Maps Motion Planning SLAM (Simultaneous Localization and Mapping) Navigation of mobile robots a
Stereo Vision as a Sensor for EKF SLAM
 Stereo Vision as a Sensor for EKF SLAM Wikus Brink Electronic Systems Lab Electrical and Electronic Engineering University of Stellenbosch Email: 1483986@sun.ac.za Corné E. van Daalen Electronic Systems
Stereo Vision as a Sensor for EKF SLAM Wikus Brink Electronic Systems Lab Electrical and Electronic Engineering University of Stellenbosch Email: 1483986@sun.ac.za Corné E. van Daalen Electronic Systems
Autonomous Navigation in Complex Indoor and Outdoor Environments with Micro Aerial Vehicles
 Autonomous Navigation in Complex Indoor and Outdoor Environments with Micro Aerial Vehicles Shaojie Shen Dept. of Electrical and Systems Engineering & GRASP Lab, University of Pennsylvania Committee: Daniel
Autonomous Navigation in Complex Indoor and Outdoor Environments with Micro Aerial Vehicles Shaojie Shen Dept. of Electrical and Systems Engineering & GRASP Lab, University of Pennsylvania Committee: Daniel
Survey: Simultaneous Localisation and Mapping (SLAM) Ronja Güldenring Master Informatics Project Intellgient Robotics University of Hamburg
 Ronja Güldenring Master Informatics Project Intellgient Robotics University of Hamburg") Survey: Simultaneous Localisation and Mapping (SLAM) Ronja Güldenring Master Informatics Project Intellgient Robotics University of Hamburg Introduction EKF-SLAM FastSLAM Loop Closure 01.06.17 Ronja Güldenring
Survey: Simultaneous Localisation and Mapping (SLAM) Ronja Güldenring Master Informatics Project Intellgient Robotics University of Hamburg Introduction EKF-SLAM FastSLAM Loop Closure 01.06.17 Ronja Güldenring
Final Exam Practice Fall Semester, 2012
 COS 495 - Autonomous Robot Navigation Final Exam Practice Fall Semester, 2012 Duration: Total Marks: 70 Closed Book 2 hours Start Time: End Time: By signing this exam, I agree to the honor code Name: Signature:
COS 495 - Autonomous Robot Navigation Final Exam Practice Fall Semester, 2012 Duration: Total Marks: 70 Closed Book 2 hours Start Time: End Time: By signing this exam, I agree to the honor code Name: Signature:
Removing Scale Biases and Ambiguity from 6DoF Monocular SLAM Using Inertial
 28 IEEE International Conference on Robotics and Automation Pasadena, CA, USA, May 9-23, 28 Removing Scale Biases and Ambiguity from 6DoF Monocular SLAM Using Inertial Todd Lupton and Salah Sukkarieh Abstract
28 IEEE International Conference on Robotics and Automation Pasadena, CA, USA, May 9-23, 28 Removing Scale Biases and Ambiguity from 6DoF Monocular SLAM Using Inertial Todd Lupton and Salah Sukkarieh Abstract
Probabilistic Robotics
 Probabilistic Robotics Sebastian Thrun Wolfram Burgard Dieter Fox The MIT Press Cambridge, Massachusetts London, England Preface xvii Acknowledgments xix I Basics 1 1 Introduction 3 1.1 Uncertainty in
Probabilistic Robotics Sebastian Thrun Wolfram Burgard Dieter Fox The MIT Press Cambridge, Massachusetts London, England Preface xvii Acknowledgments xix I Basics 1 1 Introduction 3 1.1 Uncertainty in
Zürich. Roland Siegwart Margarita Chli Martin Rufli Davide Scaramuzza. ETH Master Course: L Autonomous Mobile Robots Summary
 Roland Siegwart Margarita Chli Martin Rufli Davide Scaramuzza ETH Master Course: 151-0854-00L Autonomous Mobile Robots Summary 2 Lecture Overview Mobile Robot Control Scheme knowledge, data base mission
Roland Siegwart Margarita Chli Martin Rufli Davide Scaramuzza ETH Master Course: 151-0854-00L Autonomous Mobile Robots Summary 2 Lecture Overview Mobile Robot Control Scheme knowledge, data base mission
Monocular SLAM with Inverse Scaling Parametrization
 Monocular SLAM with Inverse Scaling Parametrization D. Marzorati 2, M. Matteucci 1, D. Migliore 1, and D. G. Sorrenti 2 1 Dept. Electronics and Information, Politecnico di Milano 2 Dept. Informatica, Sistem.
Monocular SLAM with Inverse Scaling Parametrization D. Marzorati 2, M. Matteucci 1, D. Migliore 1, and D. G. Sorrenti 2 1 Dept. Electronics and Information, Politecnico di Milano 2 Dept. Informatica, Sistem.
Tracking. Establish where an object is, other aspects of state, using time sequence Biggest problem -- Data Association
 Tracking Establish where an object is, other aspects of state, using time sequence Biggest problem -- Data Association Key ideas Tracking by detection Tracking through flow Track by detection (simple form)
Tracking Establish where an object is, other aspects of state, using time sequence Biggest problem -- Data Association Key ideas Tracking by detection Tracking through flow Track by detection (simple form)
Visual Bearing-Only Simultaneous Localization and Mapping with Improved Feature Matching
 Visual Bearing-Only Simultaneous Localization and Mapping with Improved Feature Matching Hauke Strasdat, Cyrill Stachniss, Maren Bennewitz, and Wolfram Burgard Computer Science Institute, University of
Visual Bearing-Only Simultaneous Localization and Mapping with Improved Feature Matching Hauke Strasdat, Cyrill Stachniss, Maren Bennewitz, and Wolfram Burgard Computer Science Institute, University of
Robot Mapping. Least Squares Approach to SLAM. Cyrill Stachniss
 Robot Mapping Least Squares Approach to SLAM Cyrill Stachniss 1 Three Main SLAM Paradigms Kalman filter Particle filter Graphbased least squares approach to SLAM 2 Least Squares in General Approach for
Robot Mapping Least Squares Approach to SLAM Cyrill Stachniss 1 Three Main SLAM Paradigms Kalman filter Particle filter Graphbased least squares approach to SLAM 2 Least Squares in General Approach for
Graphbased. Kalman filter. Particle filter. Three Main SLAM Paradigms. Robot Mapping. Least Squares Approach to SLAM. Least Squares in General
 Robot Mapping Three Main SLAM Paradigms Least Squares Approach to SLAM Kalman filter Particle filter Graphbased Cyrill Stachniss least squares approach to SLAM 1 2 Least Squares in General! Approach for
Robot Mapping Three Main SLAM Paradigms Least Squares Approach to SLAM Kalman filter Particle filter Graphbased Cyrill Stachniss least squares approach to SLAM 1 2 Least Squares in General! Approach for
Computer Vision Group Prof. Daniel Cremers. 11. Sampling Methods
 Prof. Daniel Cremers 11. Sampling Methods Sampling Methods Sampling Methods are widely used in Computer Science as an approximation of a deterministic algorithm to represent uncertainty without a parametric
Prof. Daniel Cremers 11. Sampling Methods Sampling Methods Sampling Methods are widely used in Computer Science as an approximation of a deterministic algorithm to represent uncertainty without a parametric
autorob.github.io Inverse Kinematics UM EECS 398/598 - autorob.github.io
 autorob.github.io Inverse Kinematics Objective (revisited) Goal: Given the structure of a robot arm, compute Forward kinematics: predicting the pose of the end-effector, given joint positions. Inverse
autorob.github.io Inverse Kinematics Objective (revisited) Goal: Given the structure of a robot arm, compute Forward kinematics: predicting the pose of the end-effector, given joint positions. Inverse
Offline Simultaneous Localization and Mapping (SLAM) using Miniature Robots
 using Miniature Robots") Offline Simultaneous Localization and Mapping (SLAM) using Miniature Robots Objectives SLAM approaches SLAM for ALICE EKF for Navigation Mapping and Network Modeling Test results Philipp Schaer and Adrian
Offline Simultaneous Localization and Mapping (SLAM) using Miniature Robots Objectives SLAM approaches SLAM for ALICE EKF for Navigation Mapping and Network Modeling Test results Philipp Schaer and Adrian
UAV Autonomous Navigation in a GPS-limited Urban Environment
 UAV Autonomous Navigation in a GPS-limited Urban Environment Yoko Watanabe DCSD/CDIN JSO-Aerial Robotics 2014/10/02-03 Introduction 2 Global objective Development of a UAV onboard system to maintain flight
UAV Autonomous Navigation in a GPS-limited Urban Environment Yoko Watanabe DCSD/CDIN JSO-Aerial Robotics 2014/10/02-03 Introduction 2 Global objective Development of a UAV onboard system to maintain flight
Monocular Visual-Inertial SLAM. Shaojie Shen Assistant Professor, HKUST Director, HKUST-DJI Joint Innovation Laboratory
 Monocular Visual-Inertial SLAM Shaojie Shen Assistant Professor, HKUST Director, HKUST-DJI Joint Innovation Laboratory Why Monocular? Minimum structural requirements Widely available sensors Applications:
Monocular Visual-Inertial SLAM Shaojie Shen Assistant Professor, HKUST Director, HKUST-DJI Joint Innovation Laboratory Why Monocular? Minimum structural requirements Widely available sensors Applications:
(W: 12:05-1:50, 50-N202)
") 2016 School of Information Technology and Electrical Engineering at the University of Queensland Schedule of Events Week Date Lecture (W: 12:05-1:50, 50-N202) 1 27-Jul Introduction 2 Representing Position
2016 School of Information Technology and Electrical Engineering at the University of Queensland Schedule of Events Week Date Lecture (W: 12:05-1:50, 50-N202) 1 27-Jul Introduction 2 Representing Position
Final Exam Study Guide
 Final Exam Study Guide Exam Window: 28th April, 12:00am EST to 30th April, 11:59pm EST Description As indicated in class the goal of the exam is to encourage you to review the material from the course.
Final Exam Study Guide Exam Window: 28th April, 12:00am EST to 30th April, 11:59pm EST Description As indicated in class the goal of the exam is to encourage you to review the material from the course.
Lecture 13 Visual Inertial Fusion
 Lecture 13 Visual Inertial Fusion Davide Scaramuzza Course Evaluation Please fill the evaluation form you received by email! Provide feedback on Exercises: good and bad Course: good and bad How to improve
Lecture 13 Visual Inertial Fusion Davide Scaramuzza Course Evaluation Please fill the evaluation form you received by email! Provide feedback on Exercises: good and bad Course: good and bad How to improve
State-space models for 3D visual tracking
 SA-1 State-space models for 3D visual tracking Doz. G. Bleser Prof. Stricker Computer Vision: Object and People Tracking Example applications Head tracking, e.g. for mobile seating buck Object tracking,
SA-1 State-space models for 3D visual tracking Doz. G. Bleser Prof. Stricker Computer Vision: Object and People Tracking Example applications Head tracking, e.g. for mobile seating buck Object tracking,
Attack Resilient State Estimation for Vehicular Systems
 December 15 th 2013. T-SET Final Report Attack Resilient State Estimation for Vehicular Systems Nicola Bezzo (nicbezzo@seas.upenn.edu) Prof. Insup Lee (lee@cis.upenn.edu) PRECISE Center University of Pennsylvania
December 15 th 2013. T-SET Final Report Attack Resilient State Estimation for Vehicular Systems Nicola Bezzo (nicbezzo@seas.upenn.edu) Prof. Insup Lee (lee@cis.upenn.edu) PRECISE Center University of Pennsylvania
Simultaneous Localization
 Simultaneous Localization and Mapping (SLAM) RSS Technical Lecture 16 April 9, 2012 Prof. Teller Text: Siegwart and Nourbakhsh S. 5.8 Navigation Overview Where am I? Where am I going? Localization Assumed
Simultaneous Localization and Mapping (SLAM) RSS Technical Lecture 16 April 9, 2012 Prof. Teller Text: Siegwart and Nourbakhsh S. 5.8 Navigation Overview Where am I? Where am I going? Localization Assumed
Robot Mapping. SLAM Front-Ends. Cyrill Stachniss. Partial image courtesy: Edwin Olson 1
 Robot Mapping SLAM Front-Ends Cyrill Stachniss Partial image courtesy: Edwin Olson 1 Graph-Based SLAM Constraints connect the nodes through odometry and observations Robot pose Constraint 2 Graph-Based
Robot Mapping SLAM Front-Ends Cyrill Stachniss Partial image courtesy: Edwin Olson 1 Graph-Based SLAM Constraints connect the nodes through odometry and observations Robot pose Constraint 2 Graph-Based
L12. EKF-SLAM: PART II. NA568 Mobile Robotics: Methods & Algorithms
 L12. EKF-SLAM: PART II NA568 Mobile Robotics: Methods & Algorithms Today s Lecture Feature-based EKF-SLAM Review Data Association Configuration Space Incremental ML (i.e., Nearest Neighbor) Joint Compatibility
L12. EKF-SLAM: PART II NA568 Mobile Robotics: Methods & Algorithms Today s Lecture Feature-based EKF-SLAM Review Data Association Configuration Space Incremental ML (i.e., Nearest Neighbor) Joint Compatibility
Robot Mapping. TORO Gradient Descent for SLAM. Cyrill Stachniss
 Robot Mapping TORO Gradient Descent for SLAM Cyrill Stachniss 1 Stochastic Gradient Descent Minimize the error individually for each constraint (decomposition of the problem into sub-problems) Solve one
Robot Mapping TORO Gradient Descent for SLAM Cyrill Stachniss 1 Stochastic Gradient Descent Minimize the error individually for each constraint (decomposition of the problem into sub-problems) Solve one
Robot Localization based on Geo-referenced Images and G raphic Methods
 Robot Localization based on Geo-referenced Images and G raphic Methods Sid Ahmed Berrabah Mechanical Department, Royal Military School, Belgium, sidahmed.berrabah@rma.ac.be Janusz Bedkowski, Łukasz Lubasiński,
Robot Localization based on Geo-referenced Images and G raphic Methods Sid Ahmed Berrabah Mechanical Department, Royal Military School, Belgium, sidahmed.berrabah@rma.ac.be Janusz Bedkowski, Łukasz Lubasiński,
ME 597/747 Autonomous Mobile Robots. Mid Term Exam. Duration: 2 hour Total Marks: 100
 ME 597/747 Autonomous Mobile Robots Mid Term Exam Duration: 2 hour Total Marks: 100 Instructions: Read the exam carefully before starting. Equations are at the back, but they are NOT necessarily valid
ME 597/747 Autonomous Mobile Robots Mid Term Exam Duration: 2 hour Total Marks: 100 Instructions: Read the exam carefully before starting. Equations are at the back, but they are NOT necessarily valid
Gaussian Processes for Robotics. McGill COMP 765 Oct 24 th, 2017
 Gaussian Processes for Robotics McGill COMP 765 Oct 24 th, 2017 A robot must learn Modeling the environment is sometimes an end goal: Space exploration Disaster recovery Environmental monitoring Other
Gaussian Processes for Robotics McGill COMP 765 Oct 24 th, 2017 A robot must learn Modeling the environment is sometimes an end goal: Space exploration Disaster recovery Environmental monitoring Other
Principles of Robot Motion
 Principles of Robot Motion Theory, Algorithms, and Implementation Howie Choset, Kevin Lynch, Seth Hutchinson, George Kantor, Wolfram Burgard, Lydia Kavraki, and Sebastian Thrun A Bradford Book The MIT
Principles of Robot Motion Theory, Algorithms, and Implementation Howie Choset, Kevin Lynch, Seth Hutchinson, George Kantor, Wolfram Burgard, Lydia Kavraki, and Sebastian Thrun A Bradford Book The MIT
2005 IEEE. Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses, in any current or future media,
 25 IEEE Personal use of this material is permitted Permission from IEEE must be obtained for all other uses in any current or future media including reprinting/republishing this material for advertising
25 IEEE Personal use of this material is permitted Permission from IEEE must be obtained for all other uses in any current or future media including reprinting/republishing this material for advertising
Visual Odometry. Features, Tracking, Essential Matrix, and RANSAC. Stephan Weiss Computer Vision Group NASA-JPL / CalTech
 Visual Odometry Features, Tracking, Essential Matrix, and RANSAC Stephan Weiss Computer Vision Group NASA-JPL / CalTech Stephan.Weiss@ieee.org (c) 2013. Government sponsorship acknowledged. Outline The
Visual Odometry Features, Tracking, Essential Matrix, and RANSAC Stephan Weiss Computer Vision Group NASA-JPL / CalTech Stephan.Weiss@ieee.org (c) 2013. Government sponsorship acknowledged. Outline The
Robotic Perception and Action: Vehicle SLAM Assignment
 Robotic Perception and Action: Vehicle SLAM Assignment Mariolino De Cecco Mariolino De Cecco, Mattia Tavernini 1 CONTENTS Vehicle SLAM Assignment Contents Assignment Scenario 3 Odometry Localization...........................................
Robotic Perception and Action: Vehicle SLAM Assignment Mariolino De Cecco Mariolino De Cecco, Mattia Tavernini 1 CONTENTS Vehicle SLAM Assignment Contents Assignment Scenario 3 Odometry Localization...........................................
An idea which can be used once is a trick. If it can be used more than once it becomes a method
 An idea which can be used once is a trick. If it can be used more than once it becomes a method - George Polya and Gabor Szego University of Texas at Arlington Rigid Body Transformations & Generalized
An idea which can be used once is a trick. If it can be used more than once it becomes a method - George Polya and Gabor Szego University of Texas at Arlington Rigid Body Transformations & Generalized
IROS 05 Tutorial. MCL: Global Localization (Sonar) Monte-Carlo Localization. Particle Filters. Rao-Blackwellized Particle Filters and Loop Closing
 Monte-Carlo Localization. Particle Filters. Rao-Blackwellized Particle Filters and Loop Closing") IROS 05 Tutorial SLAM - Getting it Working in Real World Applications Rao-Blackwellized Particle Filters and Loop Closing Cyrill Stachniss and Wolfram Burgard University of Freiburg, Dept. of Computer
IROS 05 Tutorial SLAM - Getting it Working in Real World Applications Rao-Blackwellized Particle Filters and Loop Closing Cyrill Stachniss and Wolfram Burgard University of Freiburg, Dept. of Computer
Simultaneous Localization and Mapping (SLAM)
") Simultaneous Localization and Mapping (SLAM) RSS Lecture 16 April 8, 2013 Prof. Teller Text: Siegwart and Nourbakhsh S. 5.8 SLAM Problem Statement Inputs: No external coordinate reference Time series of
Simultaneous Localization and Mapping (SLAM) RSS Lecture 16 April 8, 2013 Prof. Teller Text: Siegwart and Nourbakhsh S. 5.8 SLAM Problem Statement Inputs: No external coordinate reference Time series of
Tightly-Integrated Visual and Inertial Navigation for Pinpoint Landing on Rugged Terrains
 Tightly-Integrated Visual and Inertial Navigation for Pinpoint Landing on Rugged Terrains PhD student: Jeff DELAUNE ONERA Director: Guy LE BESNERAIS ONERA Advisors: Jean-Loup FARGES Clément BOURDARIAS
Tightly-Integrated Visual and Inertial Navigation for Pinpoint Landing on Rugged Terrains PhD student: Jeff DELAUNE ONERA Director: Guy LE BESNERAIS ONERA Advisors: Jean-Loup FARGES Clément BOURDARIAS
MAPPING ALGORITHM FOR AUTONOMOUS NAVIGATION OF LAWN MOWER USING SICK LASER
 MAPPING ALGORITHM FOR AUTONOMOUS NAVIGATION OF LAWN MOWER USING SICK LASER A thesis submitted in partial fulfillment of the requirements for the degree of Master of Science in Engineering By SHASHIDHAR
MAPPING ALGORITHM FOR AUTONOMOUS NAVIGATION OF LAWN MOWER USING SICK LASER A thesis submitted in partial fulfillment of the requirements for the degree of Master of Science in Engineering By SHASHIDHAR
Localization, Where am I?
 5.1 Localization, Where am I?? position Position Update (Estimation?) Encoder Prediction of Position (e.g. odometry) YES matched observations Map data base predicted position Matching Odometry, Dead Reckoning
5.1 Localization, Where am I?? position Position Update (Estimation?) Encoder Prediction of Position (e.g. odometry) YES matched observations Map data base predicted position Matching Odometry, Dead Reckoning
Colorado School of Mines. Computer Vision. Professor William Hoff Dept of Electrical Engineering &Computer Science.
 Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Bundle Adjustment 2 Example Application A vehicle needs to map its environment that it is moving
Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Bundle Adjustment 2 Example Application A vehicle needs to map its environment that it is moving
SLAM: Robotic Simultaneous Location and Mapping
 SLAM: Robotic Simultaneous Location and Mapping William Regli Department of Computer Science (and Departments of ECE and MEM) Drexel University Acknowledgments to Sebastian Thrun & others SLAM Lecture
SLAM: Robotic Simultaneous Location and Mapping William Regli Department of Computer Science (and Departments of ECE and MEM) Drexel University Acknowledgments to Sebastian Thrun & others SLAM Lecture
Combined Trajectory Planning and Gaze Direction Control for Robotic Exploration
 Combined Trajectory Planning and Gaze Direction Control for Robotic Exploration Georgios Lidoris, Kolja Kühnlenz, Dirk Wollherr and Martin Buss Institute of Automatic Control Engineering (LSR) Technische
Combined Trajectory Planning and Gaze Direction Control for Robotic Exploration Georgios Lidoris, Kolja Kühnlenz, Dirk Wollherr and Martin Buss Institute of Automatic Control Engineering (LSR) Technische
Localization and Map Building
 Localization and Map Building Noise and aliasing; odometric position estimation To localize or not to localize Belief representation Map representation Probabilistic map-based localization Other examples
Localization and Map Building Noise and aliasing; odometric position estimation To localize or not to localize Belief representation Map representation Probabilistic map-based localization Other examples
Introduction to robot algorithms CSE 410/510
 Introduction to robot algorithms CSE 410/510 Rob Platt robplatt@buffalo.edu Times: MWF, 10-10:50 Location: Clemens 322 Course web page: http://people.csail.mit.edu/rplatt/cse510.html Office Hours: 11-12
Introduction to robot algorithms CSE 410/510 Rob Platt robplatt@buffalo.edu Times: MWF, 10-10:50 Location: Clemens 322 Course web page: http://people.csail.mit.edu/rplatt/cse510.html Office Hours: 11-12
RGB-D SLAM using vanishing point and door plate information in corridor environment
 Intel Serv Robotics (2015) 8:105 114 DOI 10.1007/s11370-015-0166-1 ORIGINAL RESEARCH PAPER RGB-D SLAM using vanishing point and door plate information in corridor environment Yonghoon Ji 1 Atsushi Yamashita
Intel Serv Robotics (2015) 8:105 114 DOI 10.1007/s11370-015-0166-1 ORIGINAL RESEARCH PAPER RGB-D SLAM using vanishing point and door plate information in corridor environment Yonghoon Ji 1 Atsushi Yamashita
LAIR. UNDERWATER ROBOTICS Field Explorations in Marine Biology, Oceanography, and Archeology
 UNDERWATER ROBOTICS Field Explorations in Marine Biology, Oceanography, and Archeology COS 402: Artificial Intelligence - Sept. 2011 Christopher M. Clark Outline! Past Projects! Maltese Cistern Mapping!
UNDERWATER ROBOTICS Field Explorations in Marine Biology, Oceanography, and Archeology COS 402: Artificial Intelligence - Sept. 2011 Christopher M. Clark Outline! Past Projects! Maltese Cistern Mapping!
Kalman Filter Based. Localization
 Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Kalman Filter Based Localization & SLAM Zürich Autonomous
Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Kalman Filter Based Localization & SLAM Zürich Autonomous
DYNAMIC ROBOT LOCALIZATION AND MAPPING USING UNCERTAINTY SETS. M. Di Marco A. Garulli A. Giannitrapani A. Vicino
 DYNAMIC ROBOT LOCALIZATION AND MAPPING USING UNCERTAINTY SETS M. Di Marco A. Garulli A. Giannitrapani A. Vicino Dipartimento di Ingegneria dell Informazione, Università di Siena, Via Roma, - 1 Siena, Italia
DYNAMIC ROBOT LOCALIZATION AND MAPPING USING UNCERTAINTY SETS M. Di Marco A. Garulli A. Giannitrapani A. Vicino Dipartimento di Ingegneria dell Informazione, Università di Siena, Via Roma, - 1 Siena, Italia
Seminar Dept. Automação e Sistemas - UFSC Scan-to-Map Matching Using the Hausdorff Distance for Robust Mobile Robot Localization
 Seminar Dept. Automação e Sistemas - UFSC Scan-to-Map Matching Using the Hausdorff Distance for Robust Mobile Robot Localization Work presented at ICRA 2008, jointly with ANDRES GUESALAGA PUC Chile Miguel
Seminar Dept. Automação e Sistemas - UFSC Scan-to-Map Matching Using the Hausdorff Distance for Robust Mobile Robot Localization Work presented at ICRA 2008, jointly with ANDRES GUESALAGA PUC Chile Miguel
Artificial Intelligence for Robotics: A Brief Summary
 Artificial Intelligence for Robotics: A Brief Summary This document provides a summary of the course, Artificial Intelligence for Robotics, and highlights main concepts. Lesson 1: Localization (using Histogram
Artificial Intelligence for Robotics: A Brief Summary This document provides a summary of the course, Artificial Intelligence for Robotics, and highlights main concepts. Lesson 1: Localization (using Histogram
Stable Vision-Aided Navigation for Large-Area Augmented Reality
 Stable Vision-Aided Navigation for Large-Area Augmented Reality Taragay Oskiper, Han-Pang Chiu, Zhiwei Zhu Supun Samarasekera, Rakesh Teddy Kumar Vision and Robotics Laboratory SRI-International Sarnoff,
Stable Vision-Aided Navigation for Large-Area Augmented Reality Taragay Oskiper, Han-Pang Chiu, Zhiwei Zhu Supun Samarasekera, Rakesh Teddy Kumar Vision and Robotics Laboratory SRI-International Sarnoff,
Mobile Robotics. Mathematics, Models, and Methods
 Mobile Robotics Mathematics, Models, and Methods Mobile Robotics offers comprehensive coverage of the essentials of the field suitable for both students and practitioners. Adapted from the author's graduate
Mobile Robotics Mathematics, Models, and Methods Mobile Robotics offers comprehensive coverage of the essentials of the field suitable for both students and practitioners. Adapted from the author's graduate
D-SLAM: Decoupled Localization and Mapping for Autonomous Robots
 D-SLAM: Decoupled Localization and Mapping for Autonomous Robots Zhan Wang, Shoudong Huang, and Gamini Dissanayake ARC Centre of Excellence for Autonomous Systems (CAS), Faculty of Engineering, University
D-SLAM: Decoupled Localization and Mapping for Autonomous Robots Zhan Wang, Shoudong Huang, and Gamini Dissanayake ARC Centre of Excellence for Autonomous Systems (CAS), Faculty of Engineering, University
CVPR 2014 Visual SLAM Tutorial Efficient Inference
 CVPR 2014 Visual SLAM Tutorial Efficient Inference kaess@cmu.edu The Robotics Institute Carnegie Mellon University The Mapping Problem (t=0) Robot Landmark Measurement Onboard sensors: Wheel odometry Inertial
CVPR 2014 Visual SLAM Tutorial Efficient Inference kaess@cmu.edu The Robotics Institute Carnegie Mellon University The Mapping Problem (t=0) Robot Landmark Measurement Onboard sensors: Wheel odometry Inertial